Система управления для остановки шпинделя в заданном положении - SU1294297A3
Код документа: SU1294297A3
Чертежи

Описание
Изобретение относится к системе управления остановкой шпинделя в станке в заданном положении поворо- ,та,
Цель изобретения - повышение точн ности потенционирования шпинделя при случайных смещениях элементов датчика .
Поставленная цель достигается за счет возможности регулирования сме- щения нулевой точки перехода сигнала электромагнитного датчика из положительной области в отрицательную и наоборот.
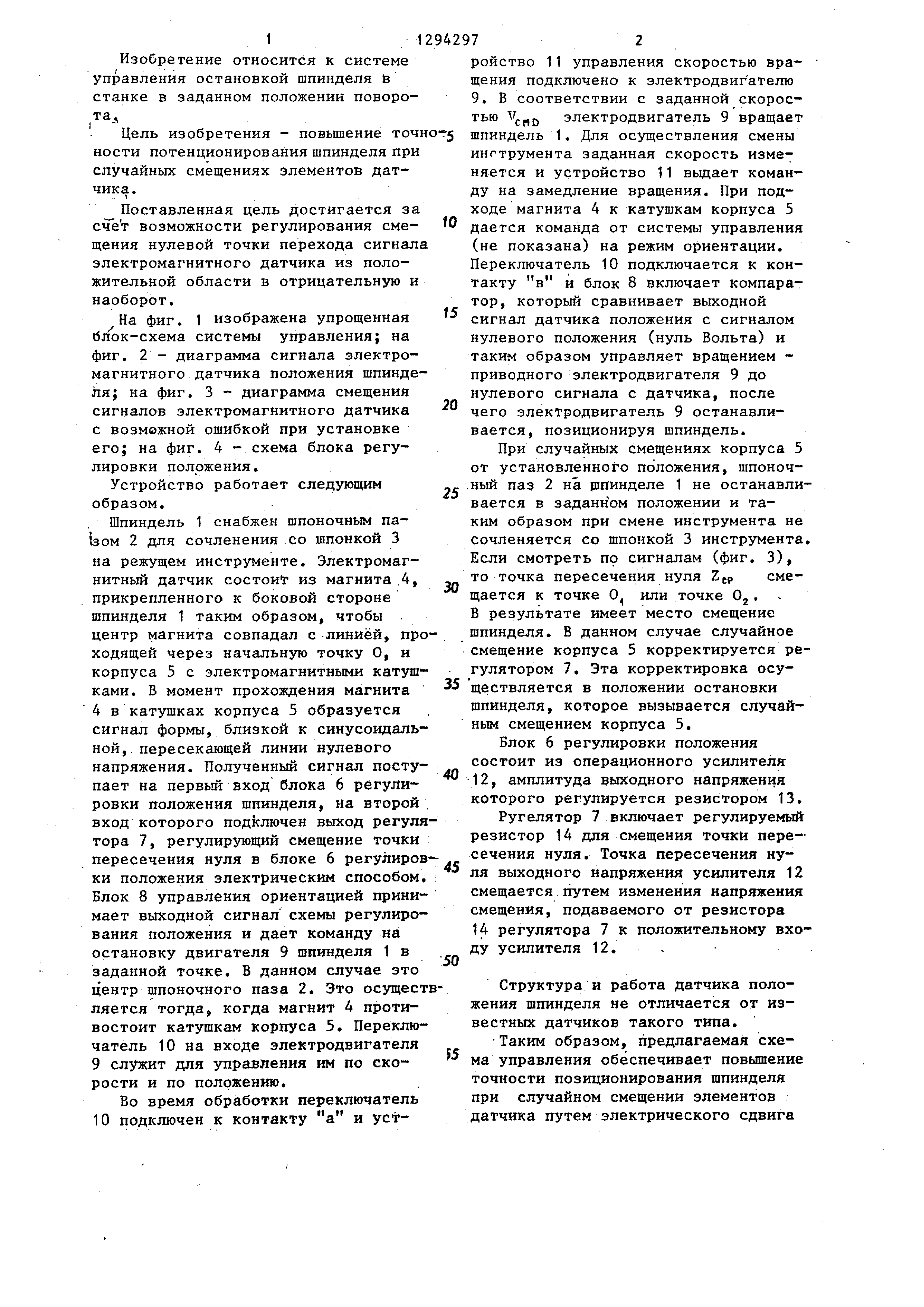
На фиг. 1 изображена упрощенная блок-схема системы управления; на фиг. 2 - диаграмма сигнала электромагнитного датчика положения шпинделя; на фиг. 3 - диаграмма смещения сигналов электромагнитного датчика с возможной ошибкой при установке его; на фиг. 4 - схема блока регулировки положения.
Устройство работает следующим образом.
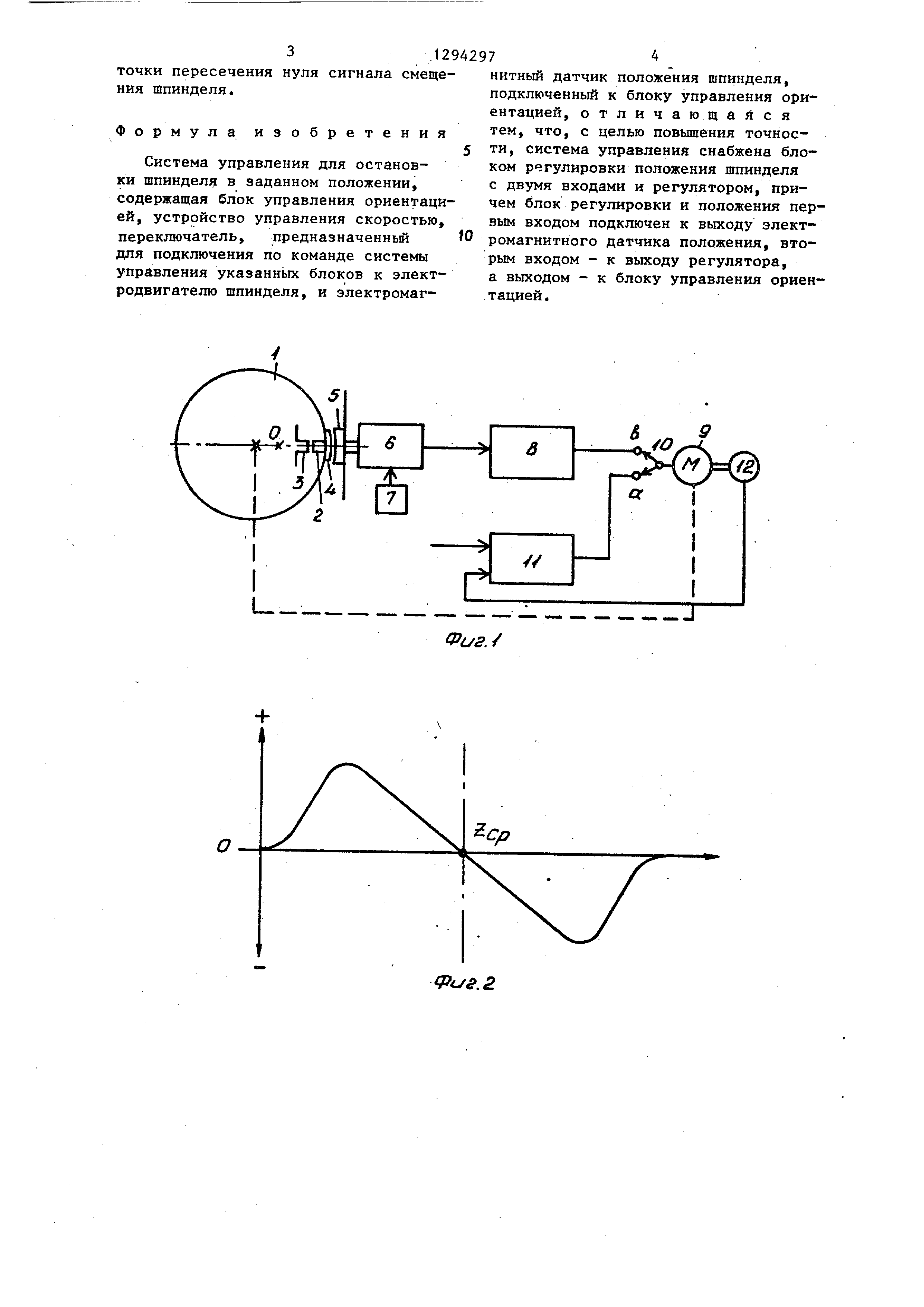
Шпиндель 1 снабжен шпоночным па- 1зом 2 для сочленения со шпонкой 3 на режущем инструменте. Электромагнитный датчик состои г из магнита 4, прикрепленного к боковой стороне шпинделя 1 таким образом, чтобы центр магнита совпадал с линией, проходящей через начальную точку О, и корпуса 5 с электромагнитными катушками . В момент прохождения магнита 4 в катушках корпуса 5 образуется сигнал формы, близкой к синусоидальной ,, пересекающей линии нулевого напряжения. Полученный сигнал посту- пает на первьй вход блока 6 регулировки положения шпинделя, на второй вход которого подключен выход регулятора 7, регулирующий смещение точки пересечения нуля в блоке 6 регулиров ки положения электрическим способом. Блок 8 управления ориентацией принимает выходной сигнал схемы регулирования положения и дает команду на остановку двигателя 9 шпинделя 1 в заданной точке. В данном случае это центр шпоночного паза 2. Это осущест ляется тогда, когда магнит 4 противостоит катушкам корпуса 5. Переключатель 10 на входе электродвигателя
9служит для управления им по скорости и по положению.
Во время обработки переключатель
10подключен к контакту а и уст
5
0
5
О
, .
0
5
F5
ройство 11 управления скоростью вращения подключено к электродвигателю 9. В соответствии с заданной скоростью cnD электродвигатель 9 вращает шпиндель 1. Для осуществления смены ингтрумента заданная скорость изменяется и устройство 11 выдает команду на замедление вращения. При подходе магнита 4 к катушкам корпуса 5 дается команда от системы управления (не показана) на режим ориентации. Переключатель 10 подключается к контакту в и блок 8 включает компаратор , который сравнивает выходной сигнал датчика положения с сигналом нулевого положения (нуль Вольта) и таким образом управляет вращением - приводного электродвигателя 9 до нулевого сигнала с датчика, после чего электродвигатель 9 останавливается , позиционируя шпиндель.
При случайных смещениях корпуса 5 от установленного положения, шпоноч- .ный паз 2 на щпинделе 1 не останавливается в заданнЪм положении и таким образом при смене инструмента не сочленяется со шпонкой 3 инструмента. Если смотреть по сигналам (фиг. 3), то точка пересечения нуля смещается к точке 0 или точке 0 . В результате имеет место смещение шпинделя. В данном случае случайное смещение корпуса 5 корректируется ре- гулятором 7. Эта корректировка осуществляется в положении остановки шпинделя, которое вызывается случайным смещением корпуса 5.
Блок 6 регулировки положения состоит из операционного усилителя 12, амплитуда эыходного напряжения которого регулируется резистором 13.
Ругелятор 7 включает регулируемый резистор 14 для смещения точки пересечения нуля. Точка пересечения нуля выходного напряжения усилителя 12 смещается путем изменения напряжения смещения, подаваемого от резистора 14 регулятора 7 к положительному входу усилителя 12. ,
Структура и работа датчика положения шпинделя не отличается от известных датчиков такого типа.
Таким образом, предлагаемая схема управления обеспечивает повышение точности позиционирования шпинделя при случайном смещении элементов датчика путем электрического сдвига
точки пересечения нуля сигнала смещения шпинделя.
Формула изобретения
Система управления для остановки шпинделя в заданном положении, содержащая блок управления ориентацией , устройство управления скоростью, переключатель, предназначенньй для подключения по команде системы управления указанньпс блоков к электродвигателю шпинделя, и электромагнитный датчик положения шпинделя, подключенный к блоку управления ориентацией , отличающайся тем, что, с целью повышения точности , система управления снабжена блоком регулировки положения шпинделя с двумя входами и регулятором, причем блок регулировки и положения первым входом подключен к выходу электромагнитного датчика положения, вторым входом - к выходу регулятора, а выходом - к блоку управления ориентацией .
Реферат
Изобретение относится к системе управления остановкой шпинделя станка в заданном положении. Целью изобретения является повьшение точности позиционирования шпинделя при случайных смещениях элементов датчика . Поставленная цель достигается за счет возможности.регулирования смещения нулевой точки перехода сигнала электромагнитного д атчика из положительной области в отрицательную . Сущность изобретения состоит в том, что в схему введен блок регулировки положения с регулятором, который , изменяя напряжение смещения в усилителе блока регулировки положения , может смещать точку перехода сигнала через нуль. А ил. I СО to ;о to ;о сн

Формула
Комментарии