Устройство для управления автоматической сменой инструмента вертикального обрабатывающего центра - SU1289391A3
Код документа: SU1289391A3
Чертежи


Описание
1 .
Изобретение относится к станкостроению и может применяться для управления механизмом смены инструмента обрабатывающего центра, выполняющего операции обработки автоматически .
Цель изобретения - повышение точности позиционирования револьверной головки,
Поставленная цель достигается за счет исключения путевых выключате- лей, используемых для подачи команд при позиционировании револьверной головки.
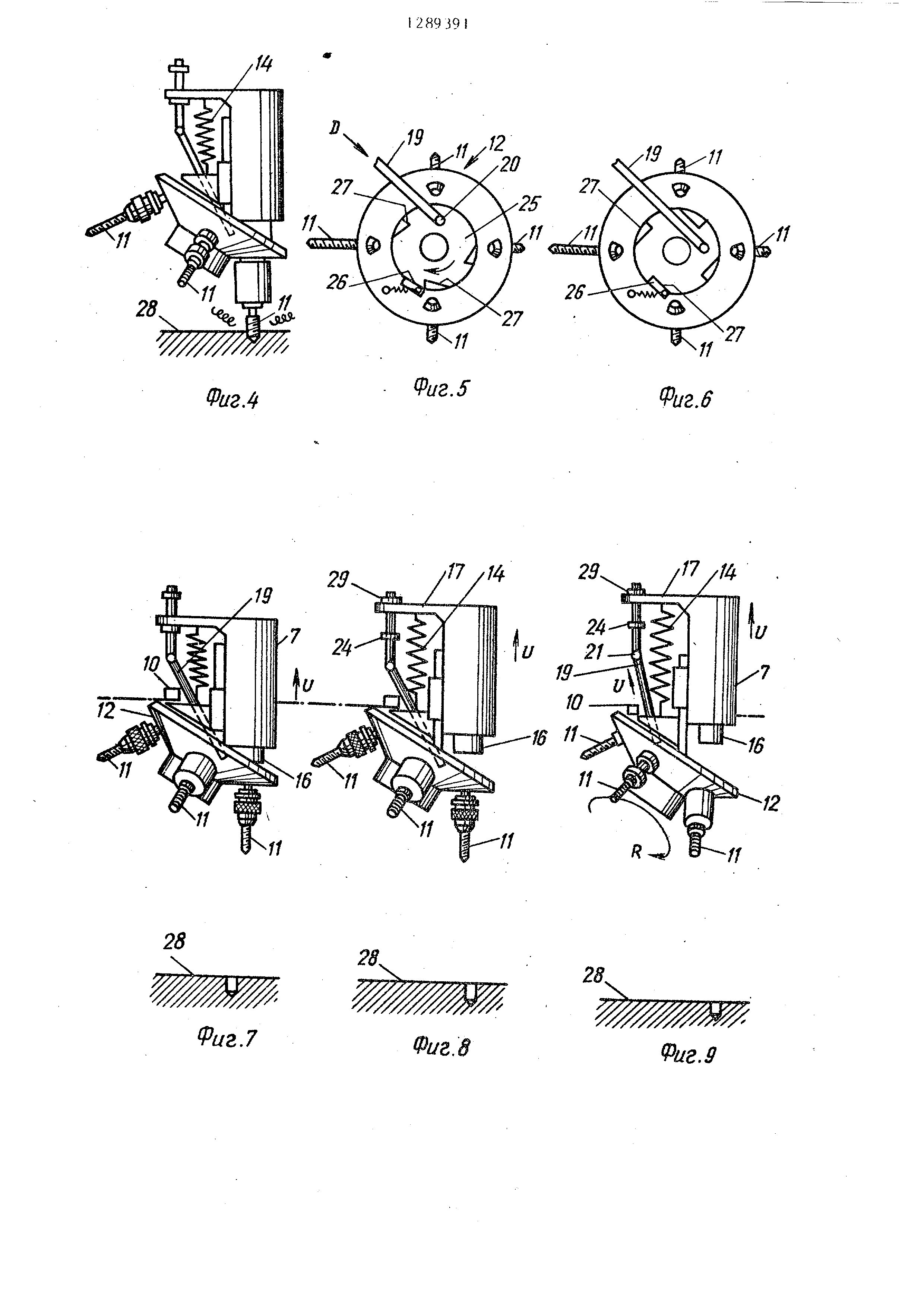
На фиг, 1 показан обрабатывающий центр, общий вид; на фиг. 2 - шпиндельный узел с револьверной головкой и приводами, общий вид; на фиг..3 - шпиндельный узел в момент начала выхода из нулевого положения, вид сбоку; на фиг, 4 - револьверная головка по фиг, 3, вид сверху; на 4иг, 5 - шпиндельный узел в положении обработки, вид сбоку; на фиг, 6 револьверная головка по 4иг, 5, вид св ерху; на фиг, 7 - шпиндельный узел в начале выхода из нулевого положения , вид сбоку; на фиг, 8 - револь- верная головка по фиг, 7, вид сверху; на фиг. 9 - шпиндельный узел во время вращения револьверной головки , вид сбоку; на фиг. 10 - револьверная головка по фиг, 9, вид сверху; на фиг. 11 - шпиндельньш узел во время вращения револьверной головки вид сбоку; на фиг, 12 - револьверная головка по фиг. 11, вид сверху; на (|иг.. 13 - блок-схема электрической цепи регулирования вертикального привода; на фиг. 14 - схема операционных последовательностей работы шпиндельного механизма,
I
Устройство Предназначено для управления обрабатываюшзим центром, состоящем из шкафа 1 управления, на фронтальной поверхности которого установлена панель 2 управления и ленточное считывающее устройство 3, и механической части, состоящей из сто ла 4, на котором размещается обрабатываемое изделие, механизма привода 5 стола 4, основной стойки 6, установленной на основании и имеющей шпиндельный механизм 7, перемещающий ся вертикально, двигателя 8 вертикального перемещения, установленного на верхнем конце основной стойки 6 и предназначенного для перемещения
8939 Г2
шпиндельного механизма 7 в направлении оси Z с помощью винта 9, ограничительного элемента 10, неподвижно закрепленного на стойке 6, инструмеи5 тов 11, закрепленных на вращающейся револьверной головке 12, установленной на нижнем конце механизма 7, Головка 12 может свободно подниматься и опускаться вдоль канавки салазок
О 13, установленных на механизме 7, при этом головка постоянно поднимается вверх натяжной пружиной 14. В шпиндельном механизме 7 вращается шпиндель 15, на конце которого уста 5 новлен конус -16. На верхнем конце механизма 7 установлен ограничитель 17. Для вращения шпинделя 15 используется двигатель 18, Для вращения револьверной головки 12 используется
20 штанга 19, содержащая универсальные шарниры 20 и 21, при этом противо- весный механизм заменяется пружиной 14.
При вращении винта 9 механизм 7
5 начинает перемещаться вниз. Головка 12 остается неподвижной, поскольку она поджата пружиной 14, так как выступ 22 на конце оси 23 головки 12 остается в контакте с ограничитель ньш элементом 10. При последующем перемещении механизма 7 ограничитель 17 упирается в упор 24, уста- .новленный на штанге 19, и толкает последнюю вниз. Конец штанги 19,
35 соединенный с зубчатой пластиной 25 через универсальный шарнир 20, толкает зубчатую пластину 25 и вращает ее вхолостую, за счет чего собачка 26, выходя из зуба 27, направляется
40 к следующему зубу. При опускании шпиндельного механизма 7 конус.16 входит в зацепление, с оправкой инструмента 11, В этом положении отключается привод 8,
45 В начале обработки включаются двигатели 8 и 18, при этом головка 12. опускается вместе с механизмом 7, инструмент 1 Г достигает обрабатываемого изделия 28 и проводится
50 обработка последнего, В этом случае положение между собачкой 26 и зубом 27 показано на фиг, 5.
После окончания обработки двига- 55 тели 8 и 18 реверсируются и механизм 7, поднимаясь, растягивает пружину 14 и поднимает револьверную головку 12 с инструментом 11, По окончании подъема двигатель 18 выключает3
ся, э механизм 7 поднимается. Когда выступ 22 на верхнем конце салазок 13 упирается в ограничительный элемент 10, головка 12 не может подниматься и становится в положение, когда подъем механизма 7 временно ограничен (фиг, 7 и 8). Для смены инструмента в этом положении двигатель 8 вращается и механизм 7 начинает подниматься вверх, В этом случае ограничитель 17 упирается в упор 29 на конце штанги 19 (фиг, 9 и 10) и позволяет ограничителю 17 начать подъем упора 29 вверх, за счет чего происходит подъем штанги 19 (фиг, 11), Это заставляет зубчатую пластину 25 вращаться в направлении R за счет перемещения вверх штанги 19 (фиг, 12),
В это время собачка 26 поворачивает головку 12 в направлении R , чтобы головка 12 установила инструмент 11 в положение ниже конуса 16, При выполнении этого положения двигатель отключается и .устройство приведено в исходное положение,
С целью управлершя скоростью вра щегшя двигателя 8 при выполнении всех описанных операций на фиг, 13 представлена схема управления двигателем 8,
Схема содержит блок 30 цифрового управления, делитель 31 частоты, блок 32 обнаружения арифметического остатка, блок 33 обнаружения нуля и блок 34 сигнала переключения скорости , выдающий аналоговый сигнал, соответствующий абсолютному значению частоты вращения двигателя 8, блок 35 управления .направлением вращения который в соответствии с управляющим сигналом от блока 30 дает направление сигналу, выделенному блоком 34 сигнала переключения скоростей . Выход блока 35 соединен через сумматор 36 с выходом усилителя Я7 ошибок, выход которого соединен с входом блока 38 управления скоростью , подаюшд м сигналы на двигатель 8, Тахогенератор 39 соединен с двигателем 8 и сумматором 36, Генератор 40 установлен на ходовом винте 9 и выдает сигнал в виде одного импульса за один оборот винта 9,
Генератор 41 импульсов нулевого положения вырабатывает логический сигнал 1, когда головка 12 находится у границы участка смены инст893914
румента и участка обработки. Схема содержит блок 42 опред.ления фронта импульса для оборудования прохождения импульса нулевого положения, ждушяй мультивибратор 43, схему
ИЛИ 44, схему.И 45 и блок 46 генератора импульса, предназначенный для выработки одиночного импульса, когда клемма OFF блока 34 переключаетШ ся с логического сигнала 1 на О,
Схема работает следующим образом .
Положение, при котором выступ 22 на гбловке 12 упирается в ограничи15 тельный элемент 10, является первоначальным . Участок перемещения выше первоначального является областью смены инструмента, а ниже областью обработки,
20 При замене инструмента головка 12 вращается и на клемме а блока 30 появляется численное значение 100 и подается на делитель 31 частоты при появлении сигнала установки цифры
25 на клемме b блока 30, Управляющий сигнал вращения вперед от клеммы с блока 30 подается на блок 35 управления направлением вращения, после чего на клемме d блока 30 появляется
30 сигнал, включающий блок смены скоростей , который вырабатывает сигнал скорости, например, 4,2 м/мин. Этот сигнал проходит через блок 35 и преобразуется в сигнал вращения вперед
35 в соответствии с управляюш м сигналом от клеммы с блока 30 и затем подается на сумматор 36, Затем сигнал обрабатывается на усилителе 37 ошибок блоком контроля скорости, пода40 ющим сигнал на двигатель 8, который вращает винт 9 с заданной скоростью. При подьеМе механизма выходной сигнал генератора 41 импульсов нулевого положения изменяется с 1 до
45 О, Это фиксируется блоком 42 определения фронта импульса, вырабатывающим сигнал в соответствии с ним, Этот сигнал изменяет состояние ждущего мультивибратора 43 на обрат- 50 ное, т,е, выходной сигнал изменяется с О до 1, Клемма е блока 30 подает сигнал 1 одновременно с поступлением сигнала запуска на клемму d, при этом схема U 45 открывает- 5 ся, позволяя делителю 31 выдать сигнал О на логический уровень 1. Выход делителя 31 достигает значения 50 импульсов от генератора 40 в то время, когда конус 16 полностью отделяется от оправки инструмента 11 , при этом блок 32 детектирования арифметического остатка обнаруживает значение 50 и вырабатывает сигнал переключения. Блок 34 включается и вырабатывает сигнал скорости на выходе, например 2,5 м/мин, за сует чего происходит снижение скорости двигателя 8 и механизм 7 поднимается с заданной скоростью . После того, как винт 9 сде- лает десять оборотов, срабатывает штанга 19, которая поворачивает головку 12 с меньшей скоростью для замены инструмента. При полном подъеме механизма 7 до верхнего предела делитель 31 повышает сигнал О, а блок 33 обнаруживая такой сигнал, отсекает блок 34 переключения скорости , что останавливает двигатель 8, Блок 30 обнаруживает этд положение механизма 7 либо за счет сотого импульса от генератора 40, либо от блока 33 и подает сигнал обратного вращения в блок 35 от клеммы с, и сигнал скорости 4,2 м/мин подается в блок 34 от клеммы f блока 30, при этом на клеммах а, b и d блока 30 сигнал не появляется и клемма е имеет логический элемент О, Делитель 31 не работает, При выдаче сигнала с блока 34 двигатель 8 вращается в обратном направлении и опускает механизм 7, В этом случае конус 16 совмещается с оправкой инструмента 1 1 .
При сцеплении инструмента с конусом механизм 7 достигает первоначального положения и блок 41 выдает логический сигнал I,.который обнаруживается блоком 42, изменяющим состояние мультивибратора 43 на обратное . Выходной сигнал 1 отключает блок 34, выходной сигнал которого прерывается, за счет чего останавливается двигатель 8, Цикл смены инструмента заканчивается.
Далее блок 30 вырабатывает сигналы на клеммах с d f для начала опускания механизма 7, Генератор 41 изменяет выходной сигнал с 1 на О, блок 42 обнаруживает этот переход и меняет состояние мультивибратора 43 на обратное, при этом запускается двигатель 18, Выполняется операция обработки. После выполнени заданной операции управляющий сигна блока 30 останавливает двигатель 8
8939 Г6
и затем реверсирует его вращение, поднимая механизм 7, При достижении механизмом 7 первоначального положения генератор 41 меняет выходной
5 сигнал с О на 1. Блок 42 выдает импульс с возвратом мультивибратора 43 на выходной сигнал с О на 1, Выходной сигнал мультивибратора включает блок 34 переключения, Пос10 ледний останавливает двигатель 8, Следующий цикл аналогичен описанному . Элементы схемы могут меняться, не изменяя существа работы схемы управления ,.
f5
Формула изобретения
Устройство для управления автоматической сменой инструмента верти20 кального обрабатывающего центра, содержащее шпиндельный узел, установленный с возможностью вертикального перемещения от привода, револьверную головку с приводом, установленную с
25 возможностью вращения и вертикального перемещения на шпиндельном узле, датчик положения шпиндельного узла, управляющий скоростью шпиндельного узла через схему управления скоро30 стью, выход которой подключен к входу привода шпиндельного узла, причем датчик положения шпиндельного узла выполнен в виде импульсного датчика, установленного на выходе
привода шпиндельного узла, отличающее ся тем, что, с целью повышения точности позиционирования револьверной головки, устройство снабжено блоком цифрового управления , вход которого подключен к выходу импульсного датчика, делителем частоты с четырьмя входами, последовательно соединенными блоком алгебраического суммирования, блоком заДания скорости, блоком направления вращения шпиндельного узла и сумматором , выход которого подключен к схеме управления скоростью привода шпиндельного узла, тахогенератором,
установленным на приводе шпиндельного узла и подключенного выходом к входу сумматора, последовательно соединенными генератором импульсов нулевого положения, установленным
на приводе шпиндельного узла, детектором , мультивибратором с двумя выходами , генератором единичного импульса и Элементом ИЛИ, выход которого подключен к входу блока задания скорости, при этом один из выходов мультивибратора подключен к входу делителя частоты через элемент ИЛИ, к второму входу которого подключен один из выходов блока цифрового управления, блоком обнаружения нуля, включенным между делителем частоты и элементом ИЛИ, причем
вход делителя частоты подключен к выходу датчика п -ложения шпиндельного узла, а выходы блока цифрового управления подключены cootHeTCTseH- но к входам блока алгебраического суммирования, блока задания скорости и блока направления вращения шпиндельного узла.
цзиг.1



Реферат
Изобретение относится к станкостроению и может применяться для .управления механизмом смены инструмента обрабатывающего центра, выполняющего операции обработки автомати- чески. Целью изобретения является повьщ1ение точности позиционирования револьверной головки. Поставленная цель достигается за счет исключения путевых выключателей, используемых для подачи команд при позиционировании револьверной головки. Устройство содержит блок управления, который выдает команды на элементы схемы, управляющие скоростью двигателя вертикального перемещения шпиндельного механизма и револьверной головки в зависимости от операции заданной системой управления и положения шпиндельного меха1шзма и револьверной головки в заданный момент, 14 ил. с (/) N5 00 СО оо со ы

Формула
Комментарии