Способ формирования протектора намоткой ленточки и установка для его осуществления - SU1019996A3
Код документа: SU1019996A3
Чертежи

Описание
Изобретение относится к производству шин и предназначено для формирования протектора намоткой ленточки на каркас в процессе восстанов- . ления изношенных покрышек.
Известен способ формирования протектора , намоткой ленточки, при котором на предварительно изготовленный вращающийся каркас покрышки накладцвают протекторную ленточку из эла тичного материала и азимутально пер мещают каркас для навивки ленточки в соответствии с заданным про(}млем протектора 1 . По указанному способу азимутальное перемещение каркаса производят в зависимости от угла поворота последнего . Однако вследствие непосто янной скорости каркаса и неидеально гладкой поверхности последнего, на которой формируют протектор, фор мируемый профиль не соответствует заданному. Установка для осуществления указанного способа содержит устройство для крепления каркаса покрышки с ус . тановленным на стойке ободом привод для азимутального перемещения .карка са и систему для управления формированием заданного профиля протекТора с программным устройством и связанным с ним блоком управления приводом для азимутального перемещения .. Поворот каркаса осуществляется от взаимодействия покрышки с роликом для наложения ленточки эластомерного материала, а программное устройство выполнено в виде набора программных дисков V. Однако такое конструктивное выполнение установки не обеспечивает точного профиля формируемогопротек тора. Целью изобретения является повыш ние точности .формирования заданного профиля протектора. . Поставленная цель достигается тем, что при осуществлении способа формирования,протектора намоткой ленточки, при котором на предварительно изготовленный вращающийся каркас покрышки накладывают протекторную ленточку из эластичного матер ала и азимутально перемещают каркас для навивки ленточки в соответствии с заданным профилем протектора, ази мутальное перемещеиме каркаса произ водят в виде дискретных перемещений
являющихся прямой функцией угла поворота каркаса.
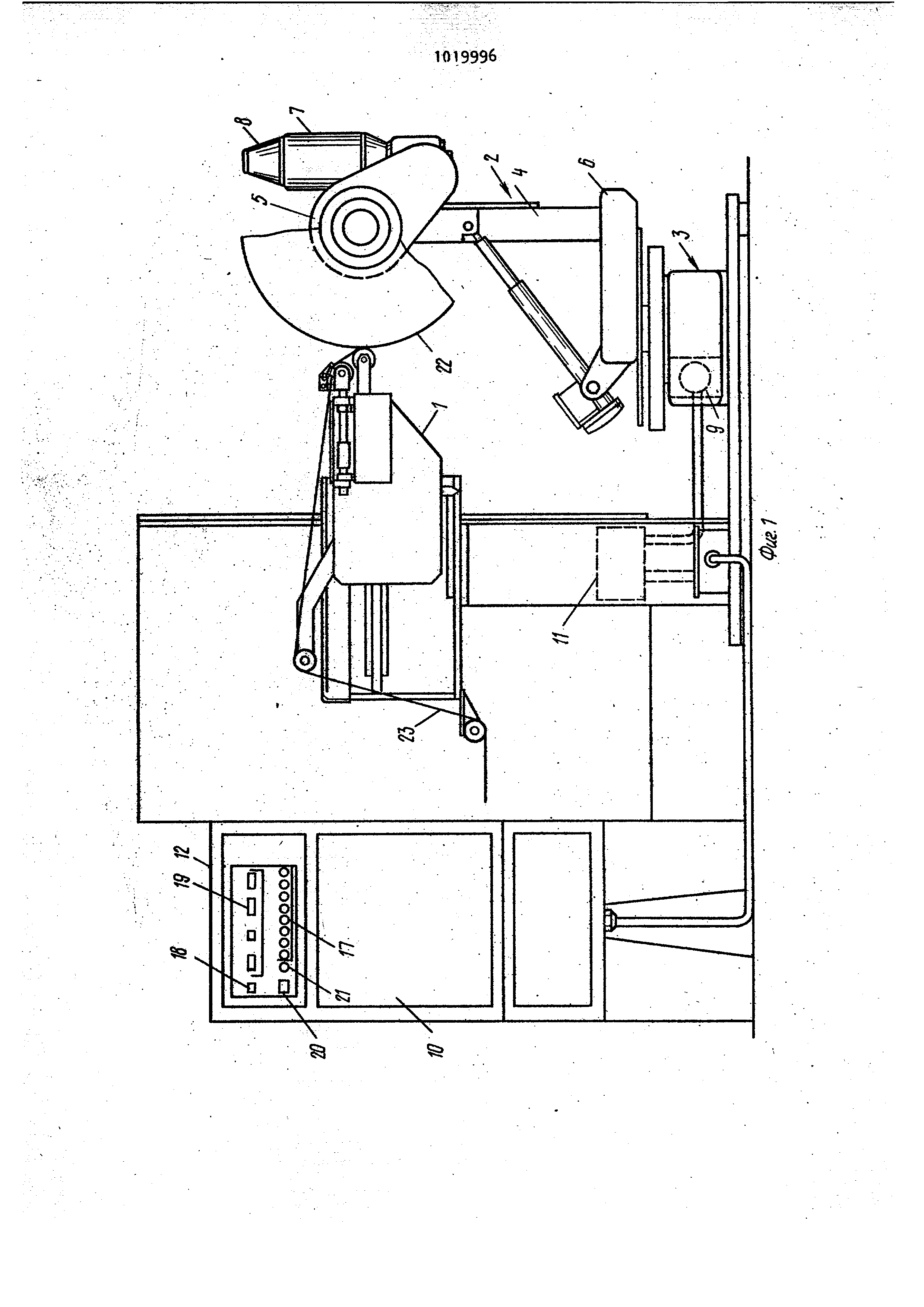
При этом в установке для формирования протектора намоткой ленточки , содержащей устройство для наложения протекторной ленточки, устройство для крепления каркаса покрышки с установленным на стойке ободом , привод для азимутального пере вЧ ия каркаса и систему для управления формированием заданного проФ протектора с программным устройством и связанным с ним блоком управления приводом для азимутального перемещения j, устройство для крепления каркаса покрышки снабжено приводом для вращения обода и связанным с ним цифровым шифратор ом , а программное устройство выполнено в виде работающего по предварительно записанным программам микрокомпьютера, связанного с цифровым шифратором и блоком управления приводом для азимутального перемещения. Микрокомпьютер Имеет клавиатуру для выбора заданной программы формирования профиля протектора, связанное с ней микропроцессорное вычислительное устройство и связанные с последним подсистему автономной, памяти и подсистему неавтономной памяти, содержащую все програмш для работы установки. Кроме того, привод для азимутального перемещения каркаса выполнен в виде шагового электродвигателя, а блок управления приводом азимутального перемещения выполнен .с возможностью преобразования выходных сигналов микрокомьютера в дискретные . приращения углового перемещения обода с помощью шагового электродвигателя . На фиг, 1 изображена установка для форми|эования протектора намоткой ленточки; на фиг. 2 - схема системы управления формированием заданного профиля протектора, Установка для формирования профиля протектора содержит устройство 1 для наложения протекторной лен- , точки, устройство 2 для крепления каркаса покрышки, механизм 3 дяя азимутального перемещения каркаса и систему для управления формирования заданного профиля протектора. Устройство 2 для крепления каркаса выполнено в виде стойки k
для размещения обода S, закрепленной на поворотном основании 6, и привода 7 дли вращения обода, снабженного цифровым шифратором 8. .
Механизм З для азимутального перемещения имеет привод SB виде шагового электродвигателя.
Система для управления формированием заданного профиля протектора .включает программное устройство в виде микрокомпьютера 10, связанного с цифровым шифратором 8 и работающего по предварительно записанным данным профиля протектора покрышки , и блок 11 управления приводом 9 эзимутального перемещения, преобразующий выходные сигналы микрокомпьютера 10 в дискретные приращения углового перемещения обода 5 с помощью шагового электродвигателя.
Микрокомпьютер 10 имеет панель 12 управления, клавиатуру 13 для набора номера заданной программы формирования Профиля, связанное с ними центральное микропроцессорное вычислительное устройство 1 и связанные с ним системы неавтономной 15 и автономной t 6 памяти,
На панели 12 управления имеются переключающие кнопки 17, дисплей
18программ, дополнительные, дисплеи
19на светоизлучающих диодах для котроля параметров программы профиля
и управления поворотом основания 6 и устройством 1, переключатели 20 и 21 для выбора номера программы и для включения программы соответственно . :
Дисплей 1.8 пр.ограмм показывает текущий номер программы в неавтономной памяти 15.
Дополнительные дисплеи 19 показы вают часть или ячейку программы, чило оборотов ободаj в частности части создаваемой памяти и длину поверхности перемещения наложенного протектора для этой части.
Система 15 неавтономной памяти содержит все необходимые программные данные для работы установки и управления соответствующими положениями каркаса 22, устанавливаемого на ободе 3, и устройства 1 для наложения протекторной ленточки и связана с центральным вычислительным устройством И, которое обеспечивает выполнение ее программ.
Система 1б автономной памяти содержит все кодирующие логические
устройства и все программы профиля каркаса 22, записанные оператором и введенные через клавиатуру 13.
В системе 16 автономной памяти применяется свободно висящий диск лентопротяжного устройства.
Вычислительное устройство 1 связано также с цифровым шифратором 8, а выход устройства1 - с блоком 11 управления приводом.
Способ формирования протектора намоткой ленточки на данной установке осуществляется следующим образом.
В соответствии с полученными расчетными данными для заданного профи5 ля протектора выбирается специально разработанная программа.
В свою очередь эта информация вводится непосредственно в микрокомпьютер 10 с помощью клавиатуры 13.
0 При этом любая программа запоминается компьютером 10 и может быть введена в действие оператором. Через клавиатуру 13 могут быть введены любые исправления и модификации в име5 ющиеся программы либо добавлена новая программа.
Устройством 1 для наложения протектора можао управлять вручную с помощью кнопок 17. Начальное поло0 жение устройства перед выполнением выбранной программы для формирования заданного профиля протектора определяется с помощью ФУНКЦИИ восстановления , которая рассчитывается пред5 варительно.
Программа заданного профиля протектора отыскивается из автономной памяти 16 путем установки переключателя 20 на заданный номер програм0 мы и запуска программы переключателем 21.
Программы мОгут быть визуально проконтролированы, поскольку все величины в виде цифр показываются
5 на светоизлучающих диодах дисплеев 18 и 19.
На ободе 5 монтируется предварительно обработанный каркас 22 покрышки и приводится во вращение с помощью привода 7. При этом цифро0 вой шифратор 8 передает сигналы в виде электрических импульсов к микрокомпьютеру 10. Эти импульсы являются прямой функцией угла поворота каркаса 22 относительно оси его вра5 щения.и имеют вид дискретных электрических сигналов, соответствующих чрезвычайно малым приращениям пово5 рота каркаса. В соответствии с заданной программой микрокомпьютер 10 рассчитывает соотношение, которое отражает заданный профиль протектора для данной части профиля, являющейся геометрической частью ПРОФИЛЯ, ограниченной фиксированным и постоянным отношением между соответствующим поворотом каркаса и его азимутальным переме.щением. Вы ходной сигнал микрокомпьютера 10 имеет форму электрического импульса , передаваемого микрокомпьютером 10 к шаговому электродвигателю через блок 11, Азимутальное перемещение каркаса 22 производят с помощью привода 9 в виде дискретных перемещений, являющихся прямрй функцией угла поворота каркаса. При вращении каркаса 22 и его аз мутальном перемещении устройством 1 накладывают на каркас проте-.кторную ленточку 23 и формируют заданный профиль протектора. Соотношение между поворотом и аз мутальным перемещением каркаса-рассчитывается микрокомпьютером 10. В процессе намотки ленточки 23 профил каркаса изменяется в соответствии с выбранной программой, а микрокомпьютер изменяет соотношение между поворотоми азимутальным перемещением каркаса, подсчитывая электрические импульсы, полученные от цифр вого шифратора 8, и сравнивая их сперепрограммируемыми величинами. На проведение непрограммируемой величи ны, подсчитанной цифровым шифраторо 8, в соответствие с импульсами в 6 микрокомпьютер вводится следующее программируемое соотношение, в соответствии с которым изменяются угол поворота каркаса и угол его азимутального перемещения. Для каждого участка профиля протектора микрокомпьютер 10 , используя программируемую величину отношения , преобразует импульсы, полученные от шифратора 8, в электрические сигналы, которые подаются на блок 11 управления шагового электродвигателя . В течение этого времени микрокомпьютер 10 регулирует азимутальное перемещение каркаса в соответствие с УГЛ.ОМ поворота последнего. Это отношение поддерживается во время всего процесса формирования протектора намоткой ленточки I на каркас 22, хотя скорость вращения каркаса может, изменяться. Это отношение определяется азимутальным перемещением каркаса, которое является серией дискретных перемещений, являющихся прямой функцией угла поворота каркаса , передаваемой шифратором в виде дискретных электрических импульсов. Соотношение азимутального перемещения и угла поворота каркаса не-зависит от скорости вращения каркаса и времени. Благодаря этому достигается большая точность в формировании заданного профиля и возможности повторимости его, поскольку становится возможным контролировать образование профиля непосредственно в процессе формирования в зависимости от угла поворота каркаса и его азимутального перемещения.
N 9 , Щ


Реферат
К Способ формирования протектора намоткой ленточки, при котором на предварительно изготовленный вращающийся каркас покрышки накладывают протекторную ленточку из эластичного материала и азимутально пег ремещают каркас для навивки ленточки а соответствии с заданным профилем протектора, отличающий .с. я тем, 4TOi с целью повышения точности формирования заданного профиля протектора, азимутальное перемещение каркаса производят в виде дискретных перемещений, являющихся прямой функцией угла поворота каркаса. 2. Установка для формирования протектора намоткой ленточки, содержащая устройство для наложения протекторной ленточки, устройство для крепления каркаса покрышки с установленным на стойке ободом, привод для азимутального перемещения каркаса и систему для управления формированием заданного профиля протектора с программным устройством и связанным с ним блоком управления при водом для азимутального перемещения, отличающаяся тем, что, с целью повышения точности формирования заданного профиля протектора, устройство для крепления каркаса покрышки снабжено приводом для вращения обода и связанным с ним цифровым шифратором, а программное устройство выполнено в виде работающего по предварительно записанным программам микрокомпьютера, связанного с цифровым шифратором и блоком управления приводом для азимутального перемещения , 3.Установка по п. 2, отли (Л (Г чающаяся тем, что микрокомпьютер имеет клавиатуру для выбора заданной программы формирования профиля протектора, связанное с ней микропроцессорное вычислительное устройство и связанные с последним подсистему автономной памяти и подсистему неавтономной памяти, содержащую все программы для работы установки . со со со 4,Установка по п. 2, отличающаяся тем, что привод для азимутального перемещения каркаса О) выполнен в виде шагового электродвигателя , а блок управления приводом дл. азимутального перемещения выполнен с возможностью преобразования выходных сигналов микрокомпьютера в дискретные приращения углового перемещения обода с помощью шагового электродвигателя.

Комментарии