Устройство сцепления для взаимного зацепления - RU2601087C1
Код документа: RU2601087C1
Чертежи









Описание
Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству сцепления для взаимного зацепления.
Уровень техники
[0002] Имеется существующее устройство сцепления для взаимного зацепления. Например, публикация заявки на патент Японии №2010-25279 (JP 2010-25279 A) описывает контроллер для электромагнитной муфты. Контроллер включает в себя первое средство установки и второе средство установки. Во время переключения пары элементов муфты из не сцепленного состояния в сцепленное состояние первое средство установки устанавливает первый ток возбуждения в качестве первоначального тока возбуждения для электромагнитного привода так, что плунжер ускоряется в направлении в результате приложения толкающей силы к плунжеру, и далее плунжер замедляется в направлении в результате того, что упругая сила превышает толкающую силу в ответ на величину хода. Второе средство установки устанавливает второй ток возбуждения, которой представляет собой новый ток возбуждения для электромагнитного привода, так, что после замедления плунжера удар, который возникает во время контакта плунжера со стопором, уменьшается.
[0003] По-прежнему существует возможность улучшения уменьшения удара из-за столкновения между перемещающимся элементом, таким как плунжер, и стопором. Например, рассматривается конфигурация, при которой пружина передачи, которая передает усилие привода, помещена между перемещающимся элементом и золотником. При этой конфигурации золотник и перемещающийся элемент являются относительно подвижными. В связи с этим существует ситуация, при которой величина хода золотника и величина хода перемещающегося элемента не совпадают друг с другом. Например, если перемещение золотника ограничено из-за контакта части с золотником, только перемещающийся элемент может выполнять ход, тогда как ход золотника остается остановленным. При такой конфигурации, если усилие регулируется на основе величины хода золотника, существует возможность, что шум столкновения не достаточно уменьшается, так как скорость перемещающегося элемента регулируется не точно.
Раскрытие изобретения
[0004] Изобретение обеспечивает устройство сцепления для взаимного зацепления, которое способно уменьшать шум столкновения из-за столкновения между перемещающимся элементом и стопором.
[0005] Аспект изобретения обеспечивает устройство сцепления для взаимного зацепления. Устройство сцепления для взаимного зацепления включает в себя механизм сцепления, перемещающийся элемент, привод, пружину передачи, возвратную пружину, стопор и электронный блок управления. Механизм сцепления представляет собой механизм взаимного зацепления, включающий в себя часть и золотник. Механизм сцепления выполнен с возможностью сцепления или расцепления при относительном перемещении части и золотника в аксиальном направлении. Перемещающийся элемент выполнен с возможностью перемещения в аксиальном направлении. Привод выполнен с возможностью приложения усилия к перемещающемуся элементу в направлении, в котором золотник сцепляется с частью. Пружина передачи помещена между перемещающимся элементом и золотником. Пружина передачи выполнена с возможностью передачи усилия привода от перемещающегося элемента к золотнику. Возвратная пружина выполнена с возможностью приложения толкающей силы к перемещающемуся элементу в направлении, противоположном направлению усилия привода. Стопор обеспечен в положении максимального хода перемещающегося элемента. Стопор выполнен с возможностью остановки перемещающегося элемента. Электронный блок управления выполнен с возможностью управления приводом. Электронный блок управления выполнен с возможностью (i) во время сцепления механизма сцепления выполнения первого управления с возможностью установки усилия привода равным усилию в первой области, и (ii) при возникновении состояния остановки на половине пути механизма сцепления в результате первого управления выполнения второго управления с возможностью установки усилия привода равным усилию, большему, чем усилие при первом управлении. Первая область представляет собой диапазон, в котором усилие привода в положении хода перемещающегося элемента больше, чем толкающая сила возвратной пружины. Первая область представляет собой область, в которой усилие привода меньше, чем сумма толкающей силы возвратной пружины в положении хода и максимальной толкающей силы, которая генерируется пружиной передачи в положении хода в случае, когда перемещение золотника ограничено.
[0006] В устройстве сцепления для взаимного зацепления электронный блок управления может быть выполнен с возможностью установки усилия, большего, чем усилие в первой области, для усилия привода при втором управлении.
[0007] В устройстве сцепления для взаимного зацепления привод может быть выполнен с возможностью притягивания перемещающегося элемента с использованием электромагнитной силы. Электронный блок управления может быть выполнен с возможностью (i)установки первого значения командного тока для значения командного тока при первом управлении, причем значение командного тока подается к приводу при первом управлении, (ii) установки второго значения командного тока, большего, чем первое значение командного тока, для значения командного тока при втором управлении, причем значение командного тока подается к электромагнитному приводу при втором управлении, и (iii) выполнения упреждающего управления с использованием первого значения командного тока и второго значения командного тока.
[0008] В устройстве сцепления для взаимного зацепления электронный блок управления может быть выполнен с возможностью установки третьего значения командного тока для значения командного тока при управлении током удержания с возможностью поддержания механизма сцепления в полностью сцепленном состоянии, причем значение командного тока подается к приводу при управлении током удержания, и третье значение командного тока представляет собой значение тока, меньшее, чем первое значение командного тока.
[0009] В устройстве сцепления для взаимного зацепления электронный блок управления может быть выполнен с возможностью (i) управления вращающейся машиной, соединенной с частью, и (ii) выполнения управления изменением крутящего момента с возможностью изменения выходного крутящего момента вращающейся машины при втором управлении.
[0010] При таким образом выполненном устройстве сцепления для взаимного зацепления электронный блок управления, обеспеченный в устройстве сцепления для взаимного зацепления, выполняет первое управление с возможностью установки усилия привода равным усилию в первой области во время сцепления механизма сцепления. Электронный блок управления выполняет второе управление с возможностью установки усилия привода равным усилию, большему, чем усилие при первом управлении, в случае, когда состояние остановки на половине пути механизма сцепления возникло в результате первого управления. Первая область представляет собой диапазон, в котором усилие привода в положении хода перемещающегося элемента больше, чем толкающая сила возвратной пружины. Первая область представляет собой диапазон, в котором усилие привода меньше, чем сумма толкающей силы возвратной пружины в положении хода и максимальной толкающей силы, которая генерируется пружиной передачи в положении хода в случае, когда перемещение золотника ограничено. Таким образом, предпочтительно возможно уменьшать шум столкновения из-за столкновения перемещающегося элемента со стопором.
Краткое описание чертежей
[0011] Признаки, преимущества и техническое и промышленное значение примерных вариантов выполнения изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых одинаковые позиции обозначают одинаковые элементы и на которых:
Фиг. 1 представляет собой блок-схему, связанную с управлением сцеплением согласно первому варианту выполнения изобретения;
Фиг. 2 представляет собой схематический вид конфигурации транспортного средства согласно первому варианту выполнения;
Фиг. 3 представляет собой вид в поперечном сечении устройства сцепления для взаимного зацепления согласно первому варианту выполнения;
Фиг. 4 представляет собой вид сбоку механизма сцепления согласно первому варианту выполнения;
Фиг. 5 представляет собой вид, который показывает состояние, когда кромки зубьев контактируют друг с другом в механизме сцепления;
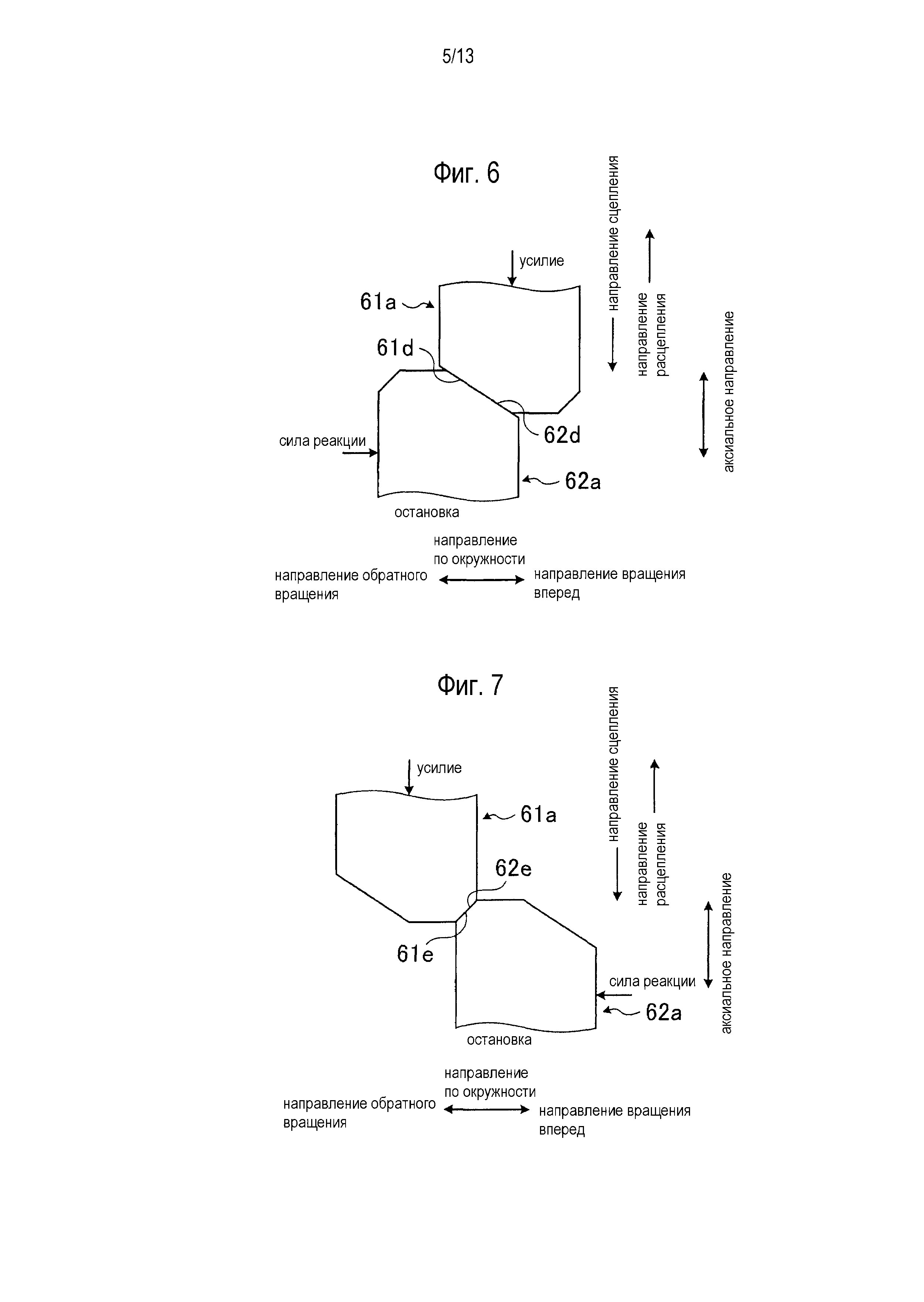
Фиг. 6 представляет собой вид, который показывает состояние, когда первые наклонные поверхности вершин зубьев собачек контактируют друг с другом в механизме сцепления;
Фиг. 7 представляет собой вид, который показывает состояние, когда вторые наклонные поверхности вершин зубьев собачек контактируют друг с другом в механизме сцепления;
Фиг. 8 представляет собой вид в поперечном сечении, который показывает состояние остановки на половине пути механизма сцепления согласно первому варианту выполнения;
Фиг. 9 представляет собой график, который показывает толкающую силу пружины передачи и толкающую силу возвратной пружины в механизме сцепления;
Фиг. 10 представляет собой график, который показывает усилие привода устройства сцепления для взаимного зацепления согласно первому варианту выполнения;
Фиг. 11 представляет собой временную диаграмму, связанную с управлением сцеплением согласно первому варианту выполнения;
Фиг. 12 представляет собой схематический вид конфигурации транспортного средства согласно второму варианту выполнения изобретения;
Фиг. 13 представляет собой схематический вид конфигурации транспортного средства согласно третьему варианту выполнения изобретения;
Фиг. 14 представляет собой схематический вид конфигурации транспортного средства согласно четвертому варианту выполнения изобретения; и
Фиг. 15 представляет собой схематический вид конфигурации транспортного средства согласно пятому варианту выполнения изобретения.
Осуществление изобретения
[0012] Далее устройство сцепления для взаимного зацепления согласно вариантам выполнения изобретения будет описано подробно со ссылкой на сопровождающие чертежи. Изобретение не ограничено вариантами выполнения. Компоненты в следующих далее вариантах выполнения также охватывают компоненты, которые легко могут быть представлены специалистами в области техники, или по существу идентичные компоненты.
[0013] Первый вариант выполнения будет описан со ссылкой на Фиг. 1 - Фиг. 11. Настоящий вариант выполнения относится к устройству сцепления для взаимного зацепления. Фиг. 1 представляет собой блок-схему, связанную с управлением сцеплением согласно первому варианту выполнения изобретения. Фиг. 2 представляет собой схематический вид конфигурации транспортного средства согласно первому варианту выполнения. Фиг. 3 представляет собой вид в поперечном сечении, который показывает устройство сцепления для взаимного зацепления согласно первому варианту выполнения. Фиг. 4 представляет собой вид сбоку, который показывает механизм сцепления согласно первому варианту выполнения. Фиг. 5 представляет собой вид, который показывает состояние, когда кромки зубьев контактируют друг с другом. Фиг. 6 представляет собой вид, который показывает состояние, когда первые наклонные поверхности контактируют друг с другом. Фиг. 7 представляет собой вид, который показывает состояние, когда вторые наклонные поверхности контактируют друг с другом. Фиг. 8 представляет собой вид в поперечном сечении, который показывает состояние остановки на половине пути. Фиг. 9 представляет собой график, который показывает толкающие силы. Фиг. 10 представляет собой график, который показывает усилие привода согласно первому варианту выполнения. Фиг. 11 представляет собой временную диаграмму, связанную с управлением сцеплением согласно первому варианту выполнения.
[0014] Как показано на Фиг. 2, система 100 приведения в движение транспортного средства согласно первому варианту выполнения включает в себя двигатель 1, первую планетарную зубчатую передачу 10, вторую планетарную зубчатую передачу 20, первую вращающуюся машину MG1, вторую вращающуюся машину MG2 и устройство 60 сцепления для взаимного зацепления. Система 100 приведения в движение транспортного средства представляет собой систему приведения в движение для гибридного транспортного средства и включает в себя первую вращающуюся машину MG1 и вторую вращающуюся машину MG2 в дополнение к двигателю 1 в качестве источника мощности.
[0015] Двигатель 1 преобразует энергию сгорания топлива во вращательное движение и далее выдает вращательное движение. Вращающийся вал двигателя 1 соединен с входным валом 2. Входной вал 2 соединен с первым водилом 14 первой планетарной зубчатой передачи 10. Первая планетарная зубчатая передача 10 относится к односателлитному типу и включает в себя первое солнечное зубчатое колесо 11, первые сателлиты 12, первое кольцевое зубчатое колесо 13 и первое водило 14. Первое водило 14 соединено с входным валом 2 и вращается за одно целое с входным валом 2. Первые сателлиты 12 поддерживаются с возможностью вращения первым водилом 14.
[0016] Первое солнечное зубчатое колесо 11 соединено с вращающимся валом 3 ротора Rt1 первой вращающейся машины MG1 и вращается за одно целое с ротором Rt1. Устройство 60 сцепления для взаимного зацепления ограничивает вращение вращающегося вала 3 ротора Rt1. Устройство 60 сцепления для взаимного зацепления функционирует в качестве тормозного устройства, которое ограничивает вращение первого солнечного зубчатого колеса 11 и вращение первой вращающейся машины MG1.
[0017] Вторая планетарная зубчатая передача 20 размещена коаксиально с двигателем 1 и первой планетарной зубчатой передачей 10. Вторая планетарная зубчатая передача 20 относится к односателлитному типу и включает в себя второе солнечное зубчатое колесо 21, вторые сателлиты 22, второе кольцевое зубчатое колесо 23 и второе водило 24. Второе солнечное зубчатое колесо 21 соединено с ротором Rt2 второй вращающейся машины MG2 и вращается за одно целое с ротором Rt2 второй вращающейся машины MG2. Второе водило 24 закреплено так, чтобы не вращаться. Второе кольцевое зубчатое колесо 23 соединено с первым кольцевым зубчатым колесом 13 и вращается за одно целое с первым кольцевым зубчатым колесом 13.
[0018] Промежуточное ведущее зубчатое колесо 25 размещено на внешней периферии второго кольцевого зубчатого колеса 23. Промежуточное ведущее зубчатое колесо 25 находится в зацеплении с промежуточным ведомым зубчатым колесом 26. Промежуточное ведомое зубчатое колесо 26 соединено с ведущим сателлитом 27. Ведущий сателлит 27 находится в зацеплении с кольцевым зубчатым колесом 29 дифференциала блока 28 дифференциала. Кольцевое зубчатое колесо 29 дифференциала соединено с ведущими колесами 31 с помощью правого и левого ведущих валов 30.
[0019] Система 100 приведения в движение транспортного средства имеет режим движения EV и режим движения HV. Режим движения EV представляет собой режим движения, в котором транспортное средство перемещается с использованием второй вращающейся машины MG2 в качестве источника мощности. В режиме движения EV транспортное средство желательно перемещается при расцепленном устройстве 60 сцепления для взаимного зацепления и остановленном двигателе 1.
[0020] Режим движения HV представляет собой режим движения, в котором транспортное средство перемещается с использованием двигателя 1 в качестве источника мощности. В режиме движения HV транспортное средство способно перемещаться с использованием второй вращающейся машины MG2 в качестве источника мощности в дополнение к двигателю 1. Система 100 приведения в движение транспортного средства имеет первый режим движения HV и второй режим движения HV в качестве режима движения HV. Первый режим движения HV представляет собой режим движения HV, в котором первую вращающуюся машину MG1 заставляют функционировать в качестве приемника силы реакции. В первом режиме движения HV первая вращающаяся машина MG1 выдает крутящий момент силы реакции на крутящий момент двигателя и заставляет крутящий момент двигателя выдаваться с первого кольцевого зубчатого колеса 13.
[0021] Второй режим движения HV представляет собой режим движения, в котором устройство 60 сцепления для взаимного зацепления заставляют функционировать в качестве приемника силы реакции. Во втором режиме движения HV устройство 60 сцепления для взаимного зацепления сцеплено, и вращение первого солнечного зубчатого колеса 11 ограничено. Устройство 60 сцепления для взаимного зацепления функционирует в качестве приемника силы реакции на крутящий момент двигателя и заставляет крутящий момент двигателя выдаваться с первого кольцевого зубчатого колеса 13.
[0022] Электронный блок (ЭБУ) 50 управления представляет собой блок управления, который управляет системой 100 приведения в движение транспортного средства, и представляет собой, например, электронный блок управления, имеющий компьютер. ЭБУ 50 электрически соединен с каждым из двигателя 1, первой вращающейся машины MG1, второй вращающейся машины MG2 и устройства 60 сцепления для взаимного зацепления. ЭБУ 50 выполняет управление впрыском топлива, электронное управление дросселем, управление зажиганием, управление запуском и т.п. двигателя 1. ЭБУ 50 выполняет управление крутящим моментом, управление скоростью вращения и т.п. первой вращающейся машины MG1 и второй вращающейся машины MG2. ЭБУ 50 выдает команду на сцепление или команду на расцепление устройству 60 сцепления для взаимного зацепления.
[0023] Как показано на Фиг. 3, устройство 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения включает в себя механизм 63 сцепления, перемещающийся элемент 66, привод 70, пружину 71 передачи, возвратную пружину 72, стопор 73 и блок 74 управления. Механизм 63 сцепления для взаимного зацепления включает в себя часть 62 и золотник 61 и сцепляется или расцепляется при относительном перемещении части 62 и золотника 61 в аксиальном направлении. Часть 62 представляет собой кольцеобразный элемент и размещена коаксиально с вращающимся валом 3. Часть 62 соединена с вращающимся валом 3 путем посадки на шлицах или т.п. и вращается за одно целое с вращающимся валом 3. Множество собачек 62а размещены на внешней периферии части 62. Собачки 62а размещены с равными интервалами в направлении по окружности. В спецификации, если не определено иное, «аксиальное направление» обозначает направление центральной оси X каждого из части 62 и золотника 61, а «радиальное направление» обозначает радиальное направление, перпендикулярное центральной оси Х. «Направление по окружности» обозначает направление вращения вокруг центральной оси X. Линии гребней собачек 62а продолжаются в аксиальном направлении.
[0024] Золотник 61 поддерживается втулкой 76 и является относительно подвижным в аксиальном направлении в отношении втулки 76. Втулка 76 прикреплена к стороне корпуса транспортного средства. Втулка 76 включает в себя первую стенку 76а, вторую стенку 76b и третью стенку 76с. Первая стенка 76а и третья стенка 76с представляют собой соответственно цилиндрические компоненты и размещены коаксиально друг с другом. Первая стенка 76а обеспечена к радиально внешней стороне третьей стенки 76с. Вторая стенка 76b соединяет один аксиальный конец первой стенки 76а с одним аксиальным концом третьей стенки 76с. В описании устройства 60 сцепления для взаимного зацепления в пределах аксиального направления направление, в котором золотник 61 перемещается по направлению к части 62, называется «направление сцепления», а направление, противоположное направлению сцепления, называется «направление расцепления». На Фиг. 3 направление с левой стороны листа в правую сторону листа представляет собой направление сцепления, а направление с правой стороны листа в левую сторону листа представляет собой направление расцепления. Вторая стенка 76b соединяет концы стороны расцепления первой стенки 76а и третьей стенки 76с.
[0025] Собачки 76d размещены на внутренней периферии третьей стенки 76с. Собачки 76d представляют собой внешние зубья, которые выступают радиально наружу. Собачки 61а, которые спарены с собачками 76d, обеспечены в золотнике 61. Собачки 61а размещены на внутренней периферии золотника 61. Собачки 61а золотника 61 сцеплены с собачками 76d втулки 76. Золотник 61 направляется собачками 76d и является относительно подвижным в аксиальном направлении в отношении втулки 76 и является относительно невращаемым в отношении втулки 76.
[0026] Часть 62 размещена на стороне сцепления третьей стенки 76с втулки 76. Собачки 62а части 62 и собачки 76d втулки 76 обращены друг к другу в аксиальном направлении. Собачки 61а золотника 61 имеют возможность перемещения в направлении сцепления, будучи направляемыми собачками 76d втулки 76, и сцепления с собачками 62а части 62. При одновременном зацеплении собачек 61а и с собачками 76d, и с собачками 62а втулка 76 соединяется с частью 62 с помощью золотника 61, и вращение части 62 ограничивается.
[0027] Привод 70 прикладывает усилие к перемещающемуся элементу 66 в направлении, в котором золотник 61 сцепляется с частью 62. Привод 70 включает в себя обмотку 67, первый хомут 68 и второй хомут 69. Первый хомут 68 и второй хомут 69 прикреплены к втулке 76 болтами или т.п. Первый хомут 68 и второй хомут 69 размещены на стороне сцепления втулки 76. Второй хомут 69 размещен на стороне сцепления первого хомута 68. Первый хомут 68 включает в себя первую стенку 68а, вторую стенку 68b и третью стенку 68с. Первая стенка 68а представляет собой цилиндрический компонент и размещена по внутренней периферии первой стенки 76а втулки 76. Вторая стенка 68b продолжается радиально внутрь из конца стороны расцепления первой стенки 68а. Вторая стенка 68b представляет собой кольцеобразный компонент. Третья стенка 68с представляет собой цилиндрический компонент и выступает из радиально внутреннего конца второй стенки 68b в направлении сцепления.
[0028] Второй хомут 69 имеет участок 69а корпуса и выступающий участок 69b. Участок 69а корпуса представляет собой кольцеобразный элемент и прикреплен к втулке 76. Выступающий участок 69b выступает из участка 69а корпуса в направлении расцепления. Выступающий участок 69b обращен к третьей стенке 68с первого хомута 68 в аксиальном направлении.
[0029] Обмотка 67 окружена первым хомутом 68 и вторым хомутом 69. Внешняя периферия обмотки 67 обращена к первой стенке 68а первого хомута 68 в радиальном направлении. Поверхность конца стороны расцепления обмотки 67 обращена ко второй стенке 68b первого хомута 68 в аксиальном направлении. Внутренняя периферия обмотки 67 обращена к третьей стенке 68с первого хомута 68 и выступающему участку 69b второго хомута 69 в радиальном направлении. Поверхность конца стороны сцепления обмотки 67 обращена к участку 69а корпуса второго хомута 69 в аксиальном направлении.
[0030] Перемещающийся элемент 66 включает в себя якорь 64 и плунжер 65 и является подвижным в аксиальном направлении. Якорь 64 включает в себя первый цилиндрический участок 64а, второй цилиндрический участок 64b и фланцевый участок 64с. Первый цилиндрический участок 64а и второй цилиндрический участок 64b представляют собой соответственно цилиндрические компоненты и размещены коаксиально с центральной осью X. Второй цилиндрический участок 64b расположен на стороне сцепления в отношении первого цилиндрического участка 64а. Второй цилиндрический участок 64b больше в диаметре, чем первый цилиндрический участок 64а. Первый цилиндрический участок 64а поддерживается с возможностью скольжения третьей стенкой 68с первого хомута 68 с помощью вкладыша 77. Второй цилиндрический участок 64b расположен между третьей стенкой 68с первого хомута 68 и выступающим участком 69b второго хомута 69 в аксиальном направлении. Фланцевый участок 64с размещен на конце стороны расцепления первого цилиндрического участка 64а. Фланцевый участок 64с представляет собой кольцеобразный компонент и выступает из первого цилиндрического участка 64а по направлению к радиально внутренней стороне.
[0031] Фланцевый участок 64с якоря 64 обращен к фланцевому участку 61b золотника 61 в аксиальном направлении. Фланцевый участок 61b обеспечен на конце стороны сцепления золотника 61. Фланцевый участок 61b представляет собой кольцеобразный компонент и выступает радиально наружу. Пружина 71 передачи размещена между фланцевым участком 64с якоря 64 и фланцевым участком 61b золотника 61. Пружина 71 передачи помещена между перемещающимся элементом 66 (якорем 64 и плунжером 65) и золотником 61 и передает усилие привода 70 от перемещающегося элемента 66 к золотнику 61. Пружина 71 передачи согласно настоящему варианту выполнения представляет собой спиральную пружину и размещена между фланцевым участком 64с и фланцевым участком 61b в сдавленном состоянии, то есть сжатом состоянии. Конец стороны расцепления пружины 71 передачи прикреплен к фланцевому участку 64с якоря 64. Конец стороны сцепления пружины 71 передачи прикреплен к фланцевому участку 61b золотника 61.
[0032] Плунжер 65 включает в себя участок 65а корпуса и фланцевый участок 65b. Участок 65а корпуса представляет собой цилиндрический компонент и соединен с якорем 64. Участок 65а корпуса прикреплен к концу стороны сцепления первого цилиндрического участка 64а якоря 64 путем посадки с натягом или т.п. Участок 65а корпуса поддерживается с возможностью скольжения выступающим участком 69b второго хомута 69 с помощью вкладыша 78. Фланцевый участок 65b представляет собой кольцеобразный компонент и выступает из участка 65а корпуса по направлению к радиально внутренней стороне. Фланцевый участок 65b обращен к фланцевому участку 61b золотника 61 в аксиальном направлении.
[0033] Стопор 73 обеспечен во втором хомуте 69. Стопор 73 обеспечен на поверхности стенки стороны расцепления второго хомута 69, то есть поверхности стенки, которая обращена к плунжеру 65 в аксиальном направлении. Второй хомут 69 имеет кольцеобразную канавку. Стопор 73 представляет собой нижнюю поверхность канавки. Стопор 73 ограничивает максимальное значение величины перемещения (величины хода) плунжера 65 в направлении сцепления. Другими словами, стопор 73 обеспечен в положении максимального хода перемещающегося элемента 66 (якоря 64 и плунжера 65) и регулирует положение максимального хода перемещающегося элемента 66. При приведении в движение перемещающегося элемента 66 в направлении сцепления с помощью усилия привода 70 и при контакте поверхности 65с дистального конца плунжера 65 со стопором 73 перемещение перемещающегося элемента 66 в направлении сцепления ограничивается. Поверхность 65с дистального конца представляет собой поверхность конца стороны сцепления участка 65а корпуса плунжера 65.
[0034] Возвратная пружина 72 прикладывает толкающую силу к перемещающемуся элементу 66 в направлении, противоположном направлению усилия привода 70. Возвратная пружина 72 размещена между фланцевым участком 65b плунжера 65 и вторым хомутом 69. Возвратная пружина 72 согласно настоящему варианту выполнения представляет собой спиральную пружину. Возвратная пружина 72 размещена между фланцевым участком 65b и вторым хомутом 69 в сдавленном состоянии, то есть сжатом состоянии. Конец стороны расцепления возвратной пружины 72 прикреплен к плунжеру 65. Конец стороны сцепления возвратной пружины 72 прикреплен ко второму хомуту 69. Когда привод 70 не генерирует усилие, перемещающийся элемент 66 перемещается в первоначальное положение, показанное на Фиг. 3, с помощью толкающей силы возвратной пружины 72 в направлении расцепления. Первоначальное положение перемещающегося элемента 66 представляет собой положение, в котором якорь 64 контактирует со второй стенкой 76b втулки 76. Величина хода перемещающегося элемента 66 представляет собой величину перемещения, посредством которого перемещающийся элемент 66 переместился из первоначального положения в направлении сцепления.
[0035] Датчик 75 хода представляет собой датчик, который обнаруживает величину хода золотника 61. Когда привод 70 не генерирует усилие, золотник 61 перемещается в первоначальное положение, показанное на Фиг. 3, с помощью толкающей силы возвратной пружины 72 в направлении расцепления. Первоначальное положение золотника 61 представляет собой положение, в котором золотник 61 контактирует со второй стенкой 76b втулки 76. Величина хода золотника 61, которая обнаруживается датчиком 75 хода, представляет собой величину перемещения, посредством которого золотник 61 переместился из первоначального положения в направлении сцепления. Сигнал, который обозначает величину хода, обнаруживаемую датчиком 75 хода, представляет собой выход к блоку 74 управления.
[0036] Блок 74 управления управляет приводом 70. Привод 70 согласно настоящему варианту выполнения представляет собой электромагнитный привод, который притягивает перемещающийся элемент 66 с использованием электромагнитной силы. Блок 74 управления управляет значением тока, при котором обмотка 67 привода 70 возбуждается. При возбуждении обмотки 67 вокруг обмотки 67 генерируется магнитное поле. Первый хомут 68, второй хомут 69 и якорь 64 намагничиваются сгенерированным магнитным полем так, что генерируется усилие, которое притягивает якорь 64 по направлению к стороне сцепления. Направление усилия привода 70 представляет собой направление, в котором золотник 61 сцепляется с частью 62. То есть, привод 70 прикладывает усилие к перемещающемуся элементу 66 в направлении, в котором золотник 61 сцепляется с частью 62.
[0037] Усилие привода 70 переключается при значении тока, при котором обмотка 67 возбуждается. Усилие привода 70 увеличивается при увеличении значения тока. Усилие привода 70 переключается при величине хода перемещающегося элемента 66, то есть размере зазора в аксиальном направлении между якорем 64 и выступающим участком 69b второго хомута 69. Усилие привода 70 увеличивается при увеличении величины хода перемещающегося элемента 66.
[0038] В устройстве 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения перемещающийся элемент 66 и золотник 61 соединены друг с другом с помощью пружины 71 передачи, и перемещающийся элемент 66 и золотник 61 являются относительно подвижными в аксиальном направлении. Таким образом, как будет описано ниже, реагирование и т.п. во время сцепления механизма 63 сцепления улучшается.
[0039] В механизме 63 сцепления для взаимного зацепления перемещение золотника 61 может быть ограничено контактом собачек 61а золотника 61 с собачками 62а части 62 в процессе сцепления.
[0040] Как показано на Фиг. 4, каждые из вершин зубьев собачек 61а и вершин зубьев собачек 62а скошены. Каждая из собачек 61а золотника 61 имеет кромку 61с зуба, первую наклонную поверхность 61d и вторую наклонную поверхность 61е. Кромка 61с зуба представляет собой поверхность конца стороны сцепления и представляет собой поверхность, перпендикулярную аксиальному направлению. Каждая из первой наклонной поверхности 61d и второй наклонной поверхности 61е наклонена в отношении аксиального направления. В направлении вращения части 62 то же самое направление, что и направление вращения двигателя 1, называется «направление вращения вперед», а направление, противоположное направлению вращения вперед, называется «направление обратного вращения». Первая наклонная поверхность 61d обеспечена на конце стороны обратного вращения каждой из собачек 61а и наклонена так, что наклонная поверхность продолжается в направлении расцепления при продолжении наклонной поверхности в направлении обратного вращения. Вторая наклонная поверхность 61е обеспечена на конце стороны вращения вперед каждой из собачек 61а и наклонена так, что наклонная поверхность продолжается в направлении расцепления при продолжении наклонной поверхности в направлении вращения вперед.
[0041] Каждая из собачек 62а части 62 имеет кромку 62с зуба, первую наклонную поверхность 62d и вторую наклонную поверхность 62e. Кромка 62с зуба представляет собой поверхность конца стороны расцепления и представляет собой поверхность, перпендикулярную аксиальному направлению. Каждая из первой наклонной поверхности 62d и второй наклонной поверхности 62e наклонена в отношении аксиального направления. Первая наклонная поверхность 62d обеспечена на конце стороны вращения вперед каждой из собачек 62а и наклонена так, что наклонная поверхность продолжается в направлении сцепления при продолжении наклонной поверхности в направлении вращения вперед. Вторая наклонная поверхность 62e обеспечена на конце стороны обратного вращения каждой из собачек 62а и наклонена так, что наклонная поверхность продолжается в направлении сцепления при продолжении наклонной поверхности в направлении обратного вращения.
[0042] При сцеплении собачек 61а золотника 61 с собачками 62а части 62 перемещение золотника 61 в аксиальном направлении может быть ограничено контактом собачек 61а с собачками 62а. Например, как показано на Фиг. 5, при контакте кромки 61с зуба каждой из собачек 61а с кромкой 62с зуба каждой из собачек 62а вращение части 62 может быть остановлено до тех пор, пока кромка 61с зуба контактирует с кромкой 62с зуба с помощью усилия привода 70. В результате перемещение золотника 61 в аксиальном направлении ограничивается, и существует возможность, что сцепление золотника 61 с частью 62 не происходит.
[0043] Как показано на Фиг. 6, перемещение золотника 61 в аксиальном направлении может быть ограничено контактом первой наклонной поверхности 61d каждой из собачек 61а с первой наклонной поверхностью 62d каждой из собачек 62а. Когда первые наклонные поверхности 61d, 62d контактируют друг с другом, и когда отношение между усилием привода 70, силой реакции, которая воздействует на собачки 62а, и силой трения на каждой контактной поверхности удовлетворяет условию остановки, вращение части 62 может быть остановлено до тех пор, пока первые наклонные поверхности 61 контактируют друг с другом. В результате перемещение золотника 61 в аксиальном направлении ограничивается так, что существует возможность, что сцепление золотника 61 с частью 62 не происходит. Сила реакции, которая воздействует на каждую из собачек 62а, вызывается, например, крутящим моментом, инерцией, трением вращения и т.п. от ведущих колес 31 или первичного движителя, такого как двигатель 1.
[0044] Как показано на Фиг. 7, перемещение золотника 61 в аксиальном направлении может быть ограничено контактом второй наклонной поверхности 61е каждой из собачек 61а со второй наклонной поверхностью 62e каждой из собачек 62а. Когда вторые наклонные поверхности 61e, 62e контактируют друг с другом и когда отношение между усилием привода 70, силой реакции, которая воздействует на каждую из собачек 62а, и силой трения на контактных поверхностях удовлетворяет условию остановки, вращение части 62 может быть остановлено до тех пор, пока вторые наклонные поверхности 61e, 62e контактируют друг с другом. В результате перемещение золотника 61 в аксиальном направлении ограничивается так, что существует возможность, что сцепление золотника 61 с частью 62 не происходит.
[0045] В отличие от ситуаций контакта, показанных на Фиг. 5 - Фиг. 7, также возможно, что перемещение золотника 61 в аксиальном направлении ограничивается до тех пор, пока поверхность стороны каждой из собачек 61а контактирует с поверхностью стороны соответствующей одной из собачек 62а. В этой спецификации состояние, когда перемещение золотника 61 в аксиальном направлении ограничивается контактом золотника 61 с частью 62, называется «состояние остановки на половине пути». Состояние остановки на половине пути представляет собой состояние, когда перемещение золотника 61 в аксиальном направлении ограничивается, несмотря на то, что величина хода золотника 61 не достигает заданной величины хода при полном сцеплении.
[0046] В устройстве 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения золотник 61 упруго поддерживается перемещающимся элементом 66 с помощью пружины 71 передачи. В состоянии остановки на половине пути, которое показано на Фиг. 8, пружина 71 передачи сжимается, и плунжер 65 и золотник 61 располагаются на расстоянии друг от друга. Кинетическая энергия золотника 61 преобразуется в потенциальную энергию пружины 71 передачи. Когда состояние остановки на половине пути отклоняется от этого состояния, и далее золотник 61 становится относительно подвижным в отношении части 62, золотник 61 выталкивается в направлении сцепления толкающей силой пружины 71 передачи. Потенциальная энергия пружины 71 передачи преобразуется в кинетическую энергию золотника 61, и скорость хода золотника 61 увеличивается. Таким образом, возможно полностью сцеплять механизм 63 сцепления путем быстрого увеличения величины хода золотника 61.
[0047] В качестве средства подавления возникновения состояния остановки на половине пути возможно, что усилие привода 70 увеличивается заранее. Путем установки усилия привода 70 равным большему значению, возможно, что состоянию остановки на половине пути будет трудно возникать из-за контакта наклонных поверхностей друг с другом, который показан на Фиг. 6 или Фиг. 7. Однако при увеличении усилия привода 70 существует неудобство в том, что шум столкновения из-за столкновения плунжера 65 со стопором 73 увеличивается. В устройстве 60 сцепления для взаимного зацепления при полном сцеплении механизма 63 сцепления перемещающийся элемент 66 контактирует со стопором 73. При большом усилии привода 70 скорость перемещающегося элемента 66 увеличивается, в результате чего шум столкновения между плунжером 65 и стопором 73 увеличивается во время полного сцепления механизма 63 сцепления. С другой стороны, существует возможность того, что только уменьшение усилия привода 70 не обеспечивает надежность сцепления и реагирование при возникновении состояния остановки на половине пути.
[0048] В устройстве 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения блок 74 управления первоначально выполняет первое управление с возможностью установки усилия привода равным усилию в первой области (смотри R1 на Фиг. 10) во время сцепления механизма 63 сцепления. Блок 74 управления выполняет второе управление с возможностью установки усилия привода 70 равным усилию, большему, чем усилие при первом управлении, при возникновении состояния остановки на половине пути механизма 63 сцепления в результате первого управления. Состояние остановки на половине пути представляет собой состояние, когда перемещение золотника 61 останавливается несмотря на то, что механизм 63 сцепления не полностью сцеплен, или состояние, когда скорость перемещения золотника 61 уменьшилась несмотря на то, что механизм сцепления 63 не полностью сцеплен. Состояние остановки на половине пути также представляет собой состояние, когда условие полного сцепления механизма 63 сцепления не достигается. Первое управление и второе управление будут описаны со ссылкой на Фиг. 9 и Фиг. 10.
[0049] На Фиг. 9 ось абсцисс представляет величину Sta хода якоря 64, а ось ординат представляет силу в аксиальном направлении. Величина Sta хода якоря 64 также представляет собой величину хода перемещающегося элемента 66. Штриховая линия Sp1 обозначает толкающую силу возвратной пружины 72. Толкающая сила Sp1 возвратной пружины 72 зависит от величины Sta хода якоря 64. Длина возвратной пружины 72 уменьшается при увеличении величины Sta хода якоря 64. Таким образом, толкающая сила Sp1 возвратной пружины 72 монотонно увеличивается при увеличении величины Sta хода.
[0050] Общая толкающая сила Spt представляет собой толкающую силу, которая представляет собой сумму толкающей силы Sp1 возвратной пружины 72 и толкающей силы Sp2 пружины 71 передачи. Каждая из толкающей силы Sp1 возвратной пружины 72 и толкающей силы Sp2 пружины 71 передачи представляет собой силу, которая прижимает перемещающийся элемент 66 по направлению к первоначальному положению, и представляет собой силу реакции на усилие привода 70. При отсутствии возникновения состояния остановки на половине пути золотник 61 находится в контакте с плунжером 65, как показано на Фиг. 3. В этом случае сила пружины 71 передачи прижимает золотник 61 в направлении сцепления и прижимает якорь 64 в направлении расцепления. То есть, сила пружины 71 передачи является нейтральной, как и сила, которая перемещает перемещающийся элемент 66 в аксиальном направлении.
[0051] В отличие от этого, при возникновении состояния остановки на половине пути из-за контакта золотника 61 с частью 62, как показано на Фиг. 8, сила пружины 71 передачи в направлении сцепления передается части 62 вместо плунжера 65. Сила пружины 71 передачи в направлении сцепления передается собачкам 62а части 62 с помощью собачек 61а золотника 61 и прижимает часть 62 в направлении сцепления. Золотник 61 принимает силу реакции, соответствующую силе пружины 71 передачи, от части 62, и перемещение золотника 61 ограничивается.
[0052] Таким образом, только сила пружины в направлении расцепления воздействует на перемещающийся элемент 66 в пределах силы пружины 71 передачи в обоих направлениях, и перемещающийся элемент 66 толкается в направлении расцепления. Например, как показано на Фиг. 9, будет описан случай, когда состояние остановки на половине пути возникает во время достижения величиной Sta хода якоря 64 заданной величины St0 хода. В этом случае, несмотря на то, что величина Sta хода якоря 64 меньше, чем заданная величина St0 хода, общая толкающая сила Spt совпадает с толкающей силой Sp1 возвратной пружины 72. При возникновении состояния остановки на половине пути при заданной величине St0 хода толкающая сила Sp2 пружины 71 передачи начинает действовать в направлении, в котором перемещающийся элемент 66 прижимается обратно, и общая толкающая сила Spt скачкообразно увеличивается. После этого, если перемещающийся элемент 66 дополнительно перемещается в направлении сцепления несмотря на то, что состояние остановки на половине пути не исключается, толкающая сила Sp2 пружины 71 передачи увеличивается при увеличении величины Sta хода.
[0053] Фиг. 9 показывает максимальную толкающую силу, которая генерируется пружиной 71 передачи, как и толкающая сила Sp2 пружины 71 передачи. Максимальная толкающая сила, которая генерируется пружиной 71 передачи, представляет собой максимальную толкающую силу, которая генерируется пружиной 71 передачи в каждом положении хода якоря 64 при ограничении перемещения золотника 61. Пружина 71 передачи генерирует максимальную толкающую силу, например, при возникновении состояния остановки на половине пути в состоянии, когда кромка 61с зуба каждой из собачек 61а контактирует с кромкой 62с зуба соответствующей одной из собачек 62а, как показано на Фиг. 5.
[0054] С другой стороны, при отсутствии возникновения состояния остановки на половине пути общая толкающая сила Spt совпадает с толкающей силой Sp1 возвратной пружины 72 независимо от величины Sta хода якоря 64. Другими словами, при отсутствии возникновения состояния остановки на половине пути толкающая сила Sp2 пружины 71 передачи в качестве силы реакции не воздействует на перемещающийся элемент 66 до полного сцепления механизма 63 сцепления.
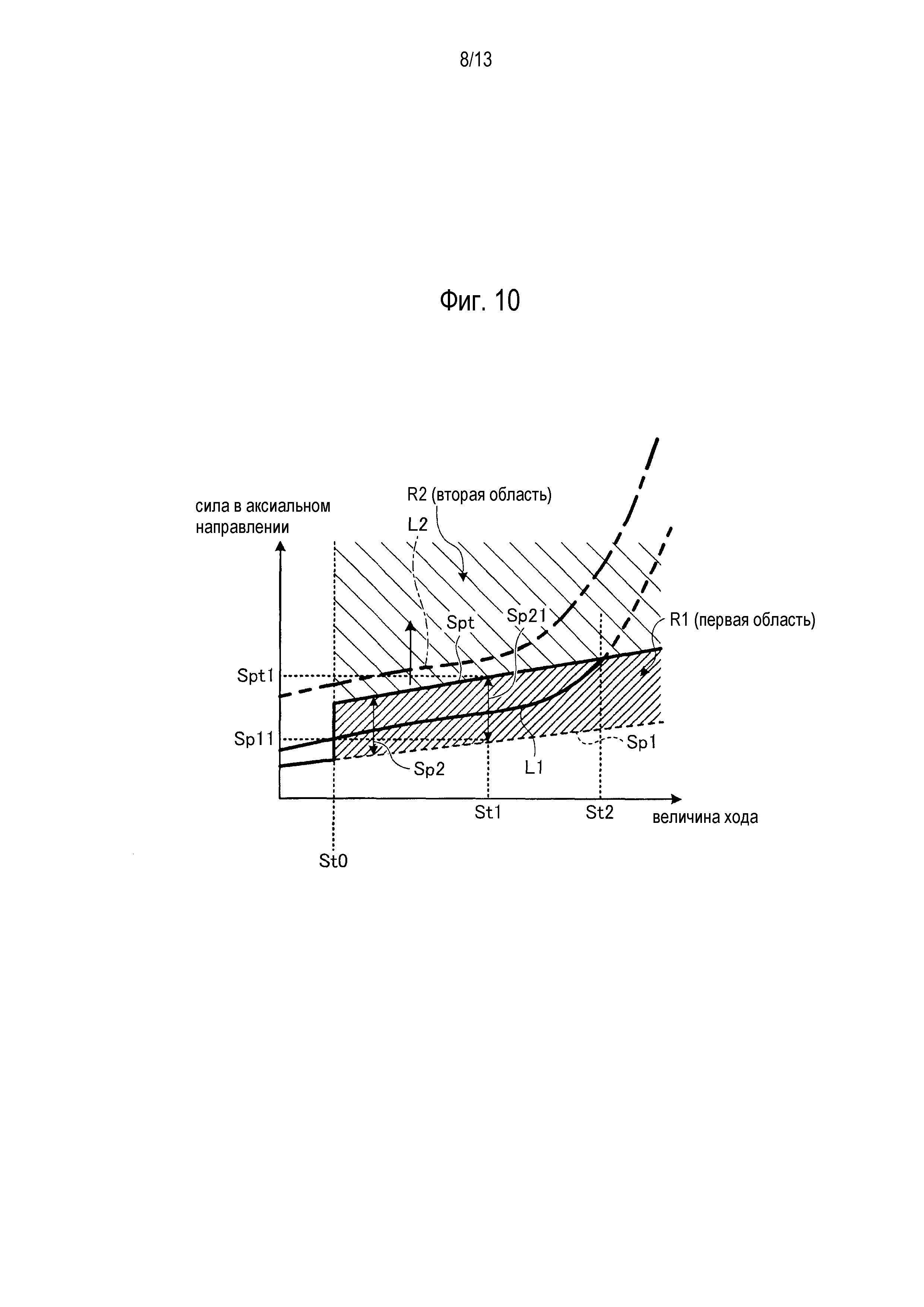
[0055] В устройстве 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения усилие привода 70 при первом управлении устанавливается на усилии в первой области R1, показанной на Фиг. 10. Первая область R1 представляет собой диапазон усилия, которое больше, чем толкающая сила Sp1 возвратной пружины 72, и которое меньше, чем максимальное значение общей толкающей силы Spt в случае, когда возникает состояние остановки на половине пути. Максимальное значение общей толкающей силы Spt представляет собой сумму толкающей силы Sp1 возвратной пружины 72 в положении хода и максимальной толкающей силы, которая генерируется пружиной 71 передачи в положении хода в случае, когда перемещение золотника 61 ограничено. На Фиг. 10 кривая L1 обозначает усилие, которое генерируется приводом 70, при установке значения командного тока к приводу 70 равным первому значению i1 командного тока (описанному ниже). При первом управлении значение командного тока к приводу 70 устанавливается на первом значении i1 командного тока. Кривая L2 обозначает усилие, которое генерируется приводом 70, при установке значения командного тока к приводу 70 равным второму значению i2 командного тока (описанному ниже).
[0056] При установке значения командного тока привода 70 равным первому значению i1 командного тока усилие привода 70 главным образом устанавливается как усилие в первой области R1. Усилие в первой области R1 больше, чем толкающая сила Sp1 возвратной пружины 72 в положении хода перемещающегося элемента 66, и меньше, чем сумма толкающей силы Sp1 возвратной пружины 72 в положении хода и максимальной толкающей силы, которая генерируется пружиной 71 передачи в положении хода в случае, когда перемещение золотника 61 ограничено. Например, когда величина Sta хода составляет St1, показанное на Фиг. 10, усилие привода 70 при первом управлении больше, чем толкающая сила Sp11 возвратной пружины 72, и меньше, чем сумма Spt1 толкающей силы Sp11 возвратной пружины 72 в положении хода и максимальной толкающей силы Sp21, которая генерируется пружиной 71 передачи в положении хода в случае, когда перемещение золотника 61 ограничено.
[0057] Таким образом, при отсутствии возникновения состояния остановки на половине пути возможно полностью сцеплять механизм 63 сцепления с использованием усилия в первой области R1. Усилие привода 70 желательно представляет собой усилие, которое незначительно превышает толкающую силу Sp1 возвратной пружины 72 в пределах первой области R1. При установке усилия привода 70 равным малому значению в пределах диапазона первой области R1 шум столкновения между плунжером 65 и стопором 73 во время полного сцепления механизма 63 сцепления уменьшается.
[0058] Блок 74 управления выполняет второе управление при возникновении состояния остановки на половине пути механизма 63 сцепления в результате первого управления. При втором управлении блок 74 управления устанавливает усилие привода 70 на усилии (смотри L2 на Фиг. 10), большем, чем усилие (смотри L1 на Фиг. 10) при первом управлении. Второе управление желательно представляет собой управление с возможностью полного сцепления механизма 63 сцепления. При втором управлении усилие привода 70 больше, чем усилие при первом управлении, так, что возможность исключения состояния остановки на половине пути улучшается. Состояние остановки на половине пути механизма 63 сцепления, например, включает в себя условие, что величина хода золотника 61 еще не достигла хода при полном сцеплении. В настоящем варианте выполнения, когда величина хода золотника 61 не становится ходом при полном сцеплении, даже при выполнении первого управления в течение заданного времени, определяется, что состояние остановки на половине пути возникло. Состояние остановки на половине пути может быть определено на основе другого условия и может быть, например, определено на основе величины хода золотника 61 и скорости переключения величины хода. Например, когда величина хода золотника 61 меньше, чем величина хода при полном сцеплении, а скорость переключения величины хода золотника 61 ниже или равна заданной скорости переключения, может быть определено состояние остановки на половине пути.
[0059] В настоящем варианте выполнения при втором управлении усилие привода 70 устанавливается на усилии, большем, чем усилие в первой области R1. Усилие привода 70 при втором управлении, например, устанавливается на усилии во второй области R2, показанной на Фиг. 10. Вторая область R2 больше, чем общая толкающая сила Spt в случае, когда возникает состояние остановки на половине пути, как показано на Фиг. 10. То есть, блок 74 управления устанавливает усилие привода 70 при втором управлении на усилии, большем, чем сумма толкающей силы Sp1 возвратной пружины 72 в положении хода и максимальной толкающей силы, которая генерируется пружиной 71 передачи в положении хода в случае, когда перемещение золотника 61 ограничено. Например, когда величина Sta хода якоря 64 представляет собой St1, показанное на Фиг. 10, усилие привода 70 при втором управлении устанавливается так, чтобы быть больше, чем сумма Stp1 толкающей силы Sp11 возвратной пружины 72 в положении хода и максимальной толкающей силы Sp21, которая генерируется пружиной 71 передачи в положении хода в случае, когда перемещение золотника 61 ограничено. Блок 74 управления согласно настоящему варианту выполнения устанавливает значение командного тока к приводу 70 на втором значении i2 командного тока, большем, чем первое значение i1 командного тока при втором управлении. Второе значение i2 командного тока представляет собой значение тока, при котором усилие привода 70 устанавливается на усилии во второй области R2.
[0060] При установке усилия привода 70 равным усилию во второй области R2 возможность исключения состояния остановки на половине пути увеличивается. Например, в случае состояния остановки на половине пути, при котором наклонные поверхности собачек 61а, 62а контактируют друг с другом, возможно, что состояние остановки на половине пути исключается при увеличении усилия привода 70 с усилия в первой области R1 до усилия во второй области R2, и возможность полного сцепления механизма 63 сцепления увеличивается.
[0061] При установке усилия привода 70 равным усилию во второй области R2 усилие привода 70 превышает общую толкающую силу Spt. Таким образом, в состоянии остановки на половине пути возможно заставлять перемещающийся элемент 66 совершать ход раньше золотника 61. То есть, даже в состоянии, когда перемещение золотника 61 в аксиальном направлении ограничено, возможно перемещать перемещающийся элемент 66 в направлении сцепления с использованием усилия во второй области R2. В этом случае длина пружины 71 передачи уменьшается при увеличении величины Sta хода перемещающегося элемента 66. Таким образом, когда состояние остановки на половине пути исключено, и золотник 61 является относительно подвижным в аксиальном направлении в отношении части 62, возможно быстро перемещать золотник 61 в полностью сцепленное положение с использованием возвращающей силы пружины 71 передачи.
[0062] Блок 74 управления согласно настоящему варианту выполнения выполняет управление изменением крутящего момента при втором управлении. Управление изменением крутящего момента представляет собой управление с возможностью изменения выходного крутящего момента первой вращающейся машины MG1. Блок 74 управления имеет функцию управления первой вращающейся машиной MG1, соединенной с частью 62. Блок 74 управления, например, требует, чтобы ЭБУ 50 выполняло управление изменением крутящего момента первой вращающейся машины MG1. ЭБУ 50 подает команду на выполнение управления изменением крутящего момента к первой вращающейся машине MG1 в ответ на запрос от блока 74 управления. Управление изменением крутящего момента представляет собой, например, управление с возможностью переключения значения команды крутящего момента к первой вращающейся машине MG1 (далее просто называемого «значение команды крутящего момента MG1») в заданной форме волны. Заданная форма волны представляет собой, например, форму волны, такую как прямоугольная форма волны, треугольная форма волны и синусоидальная форма волны. При управлении изменением крутящего момента значение команды крутящего момента MG1 желательно переключается попеременно между крутящим моментом в направлении вращения вперед и крутящим моментом в направлении обратного вращения. Путем выполнения управления изменением крутящего момента величина или направление вращения крутящего момента, который представляет собой вход к части 62, переключается. Таким образом, облегчается исключение состояния остановки на половине пути.
[0063] Управление сцеплением в устройстве 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения будет описано со ссылкой на Фиг. 1 - Фиг. 11. Поток управления, показанный на Фиг. 1, выполняют во время подачи команды на переключение устройства 60 сцепления для взаимного зацепления из расцепленного состояния в сцепленное состояние, и, например, повторно выполняют с заданными интервалами. Временная диаграмма, показанная на Фиг. 11, показывает переключения значения командного тока (значения команды усилия) в случае, когда состояние остановки на половине пути возникло при управлении сцеплением согласно настоящему варианту выполнения.
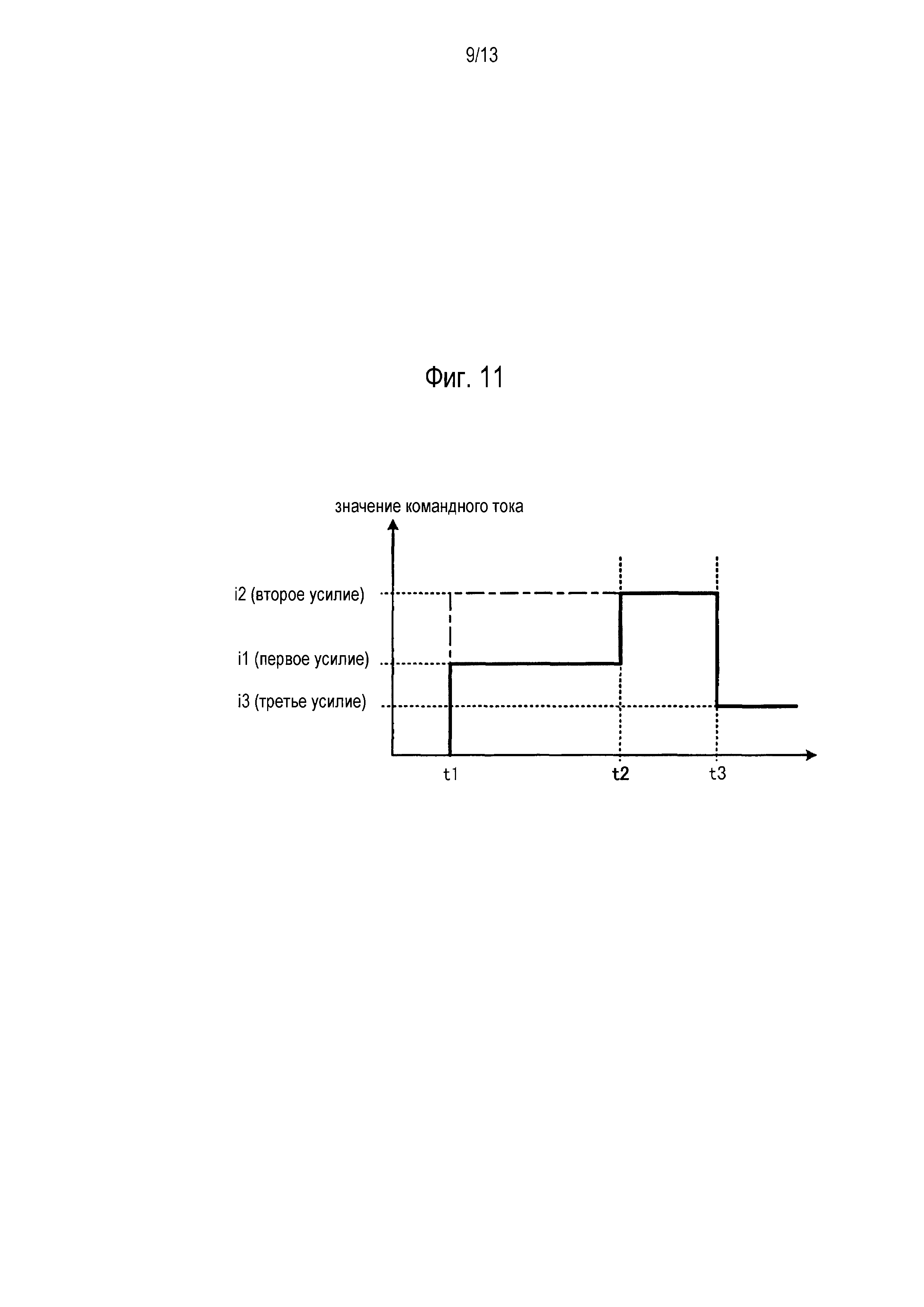
[0064] На этапе S10 на Фиг. 1 блок 74 управления подает команду на подачу тока к обмотке 67. Блок 74 управления выполняет первое управление с возможностью установки значения командного тока для возбуждения обмотки 67 равным первому значению i1 командного тока. Первое значение i1 командного тока представляет собой значение тока, при котором возможно устанавливать усилие привода 70 на усилии в первой области R1. Первое значении i1 командного тока определяют, например, заранее на основе характеристик пружины возвратной пружины 72 и характеристик пружины пружины 71 передачи. При установке величины тока, подаваемого к обмотке 67, равным первому значению i1 командного тока усилие, которое генерируют с помощью привода 70, становится значением, обозначенным кривой L1, показанной на Фиг. 10, при величине Sta хода перемещающегося элемента 66.
[0065] Усилие, которое генерируют в ответ на первое значение i1 командного тока, по меньшей мере больше, чем толкающая сила Sp1 возвратной пружины 72 во всей области величины Sta хода якоря 64. Когда величина Sta хода якоря 64 меньше, чем предельный ход St2, усилие L1 привода 70, которое генерируют в ответ на первое значение i1 командного тока, меньше, чем максимальное значение общей толкающей силы Spt в случае, когда возникает состояние остановки на половине пути. С другой стороны, когда величина Sta хода якоря 64 больше или равна предельному ходу St2, усилие L1 привода 70, которое генерируют в ответ на первое значение i1 командного тока, становится больше или равно максимальному значению общей толкающей силы Spt в случае, когда возникает состояние остановки на половине пути.
[0066] Таким образом, первое управление с возможностью установки усилия привода 70 равным усилию в первой области R1 понимается выполняемым, пока величина Sta хода якоря 64 меньше, чем предельный ход St2. При превышении величины Sta хода якоря 64 предельного хода St2 усилие L1, которое генерируют в ответ на первое значении i1 командного тока, становится усилием во второй области R2. Таким образом, когда величина Sta хода якоря 64 больше или равна предельному ходу St2, усилие L1, которое генерируют в ответ на первое значение i1 командного тока, понимается достаточно большим для полного сцепления механизма 63 сцепления. На Фиг. 11 управление сцеплением механизма 63 сцепления начинают во время t1, и значение командного тока устанавливают на первом значении i1 командного тока. После выполнения этапа S10 способ переходит к этапу S20.
[0067] На этапе S20 блок 74 управления определяет, закончился ли ход золотника 61. Закончился ли ход золотника 61, определяют, например, на основе величины хода, которую обнаруживают датчиком 75 хода. Когда величина хода, обнаруженная датчиком 75 хода, больше или равна заданному порогу, подтверждающее определение выполняют на этапе S20. В результате определения на этапе S20 при определении, что ход золотника 61 закончился («Да» на этапе S20), способ переходит к этапу S30; в противном случае («Нет» на этапе S20) способ переходит к этапу S40.
[0068] На этапе S30 блок 74 управления выполняет управление током удержания. Управление током удержания представляет собой управление с возможностью поддержания полностью сцепленного состояния механизма 63 сцепления. Значение командного тока к приводу 70 при управлении током удержания устанавливают на третьем значении командного тока. Как показано на Фиг. 11, третье значение i3 командного тока представляет собой значение тока, меньшее, чем первое значение i1 командного тока. Третье значение i3 командного тока представляет собой значение тока, при котором усилие привода 70 больше, чем толкающая сила Sp1 возвратной пружины 72 во время полного сцепления. На Фиг. 11 во время t3 определяют, что ход золотника 61 закончился, и значение командного тока устанавливают на третьем значении i3 командного тока. После выполнения этапа S30 поток управления заканчивается.
[0069] На этапе S40 блок 74 управления определяет, возникло ли состояние остановки на половине пути. Блок 74 управления определяет, превысило ли истекшее время с момента установки значения командного тока к приводу 70 равным первому значению i1 командного тока заданное время. Заданное время определяют на основе времени, требуемого во время полного сцепления механизма 63 сцепления с использованием усилия L1, которое генерируют при первом значении i1 командного тока. Когда блок 74 управления начинает первое управление путем переключения значения командного тока к приводу 70 на первое значение i1 командного тока, блок 74 управления начинает считать истекшее время с использованием таймера. Когда истекшее время, подсчитанное таймером, превышает заданное время, подтверждающее определение выполняют на этапе S40. В результате определения на этапе S40 при определении, что истекшее время с начала первого управления превышает заданное время («Да» на этапе S40), способ переходит к этапу S50; в противном случае («Нет» на этапе S40) способ возвращается к этапу S10.
[0070] На этапе S50 блок 74 управления выполняет второе управление с возможностью установки значения командного тока к приводу 70 равным второму значению i2 командного тока. Блок 74 управления устанавливает значение командного величины тока, подаваемого к обмотке 67, на втором значении i2 командного тока. Второе значение i2 командного тока определяют, например, заранее на основе характеристик пружины возвратной пружины 72 и характеристик пружины 71 передачи. На Фиг. 11 значение командного тока переключают с первого значения i1 командного тока на второе значение i2 командного тока во время t2. После выполнения этапа S50 способ переходит к этапу S60.
[0071] На этапе S60 блок 74 управления выполняет управление изменением крутящего момента. Блок 74 управления требует, чтобы ЭБУ 50 выполняло управление изменением крутящего момента. ЭБУ 50 изменяет значение команды крутящего момента MG1 в ответ на запрос от блока 74 управления. После выполнения этапа S60 способ переходит к этапу S20. То есть, до тех пор, пока не определят, что ход золотника 61 закончился, продолжают второе управление, включающее в себя управление изменением крутящего момента.
[0072] При устройстве 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения усилие привода 70 при первом управлении устанавливается на усилии в первой области R1. Кроме тех случаев, когда возникает состояние остановки на половине пути, возможно полностью сцеплять механизм 63 сцепления в результате первого управления. Так как усилие в первой области R1 подавляется до силы, меньшей, чем максимальное значение общей толкающей силы Spt во время возникновения состояния остановки на половине пути, шум столкновения между перемещающимся элементом 66 и стопором 73 уменьшается. При возникновении состояния остановки на половине пути механизма 63 сцепления в результате первого управления выполняется второе управление. Усилие привода 70 при втором управлении представляет собой усилие, большее, чем усилие при первом управлении. Таким образом, состояние остановки на половине пути легко исключается, так, что надежность сцепления и реагирование механизма 63 сцепления улучшаются.
[0073] В настоящем варианте выполнения усилие привода 70 при втором управлении устанавливается на усилии во второй области R2. Таким образом, даже при возникновении состояния остановки на половине пути возможно выполнять ход перемещающегося элемента 66 в направлении сцепления и перемещать перемещающийся элемент 66 до положения максимального хода. Таким образом, возможно выполнять ход золотника 61 в направлении сцепления путем установки величины сжатия пружины 71 передачи равным большому значению и полного использования толкающей силы пружины 71 передачи. Даже при ограничении перемещения золотника 61 только золотник 61 останавливается, а перемещающийся элемент 66 имеет возможность далее выполнять ход. При этой конфигурации путем уменьшения инерции элемента, который начинает перемещение золотника 61 (инерции золотника 61), при отмене ограничений на перемещение золотника 61 возможно улучшать реагирование вплоть до полного сцепления. Таким образом, при устройстве 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения возможно улучшать надежность и реагирование сцепления механизма 63 сцепления.
[0074] В настоящем варианте выполнения путем установки значения командного тока к приводу 70 равным заданному значению возможно управлять приводом 70 при первом управлении и втором управлении упреждающим образом. Время с начала управления сцеплением механизма 63 сцепления до полного сцепления механизма 63 сцепления составляет около 10 мс минимум, и существует возможность, что достаточная управляемость не обеспечивается, даже когда усилие подвергается управлению с обратной связью. В отличие от этого, путем управления приводом 70 с помощью значения командного тока, определенного на основе характеристик возвратной пружины 72 и пружины 71 передачи, упреждающим образом, возможно улучшать управляемость скоростью сцепления механизма 63 сцепления. Таким образом, становится легко точно управлять скоростью хода перемещающегося элемента 66 во время полного сцепления механизма 63 сцепления и уменьшать шум столкновения. Путем определения первого значения i1 командного тока и второго значения i2 командного тока заранее в отношении подавления шума столкновения, возможно заранее планировать скорость, с которой перемещающийся элемент 66 сталкивается со стопором 73. В настоящем варианте выполнения при отсутствии возникновения состояния остановки на половине пути скорость, с которой перемещающийся элемент 66 сталкивается со стопором 73, регулируется с помощью первого значения i1 командного тока. При возникновении состояния остановки на половине пути скорость, с которой перемещающийся элемент 66 сталкивается со стопором 73, регулируется с помощью второго значения i2 командного тока.
[0075] Устройство 60 сцепления для взаимного зацепления согласно настоящему варианту выполнения выполняет управление изменением крутящего момента при втором управлении. Таким образом, исключение состояния остановки на половине пути облегчается так, что возможно улучшать надежность сцепления и реагирование механизма 63 сцепления.
[0076] Далее второй вариант выполнения будет описан со ссылкой на Фиг. 12. Во втором варианте выполнения одинаковые ссылочные позиции обозначают компоненты, имеющие функции, подобные функциям компонентов, описанных в первом варианте выполнения, а совпадающее описание исключено. Фиг. 12 представляет собой схематический вид конфигурации транспортного средства согласно второму варианту выполнения. Система 101 приведения в движение транспортного средства согласно второму варианту выполнения отличается от системы 100 приведения в движение транспортного средства согласно первому варианту выполнения тем, что вторая вращающаяся машина MG2 подсоединена с помощью блока 34 передачи.
[0077] Как показано на Фиг. 12, первое кольцевое зубчатое колесо 13 первой планетарной зубчатой передачи 10 соединено с выходным валом 33. Выходной вал 33 соединен, например, с правым и левым ведущими колесами с помощью блока дифференциала или зубчатого колеса редуктора. Вторая вращающаяся машина MG2 соединена с выходным валом 33 с помощью блока 34 передачи. Блок 34 передачи переключает скорость вращения второй вращающейся машины MG2 и далее выдает вращение к выходному валу 33. Блок 34 передачи представляет собой, например, механизм ступенчатой передачи или механизм бесступенчатой передачи. Путем регулирования передаточного отношения между ротором Rt2 второй вращающейся машины MG2 и выходным валом 33 с использованием блока 34 передачи возможно приводить в действие вторую вращающуюся машину MG2 в области скорости вращения с высокой эффективностью. Резольвер 35 обнаруживает скорость вращения или положение вращения ротора Rt1 первой вращающейся машины MG1. ЭБУ 50 управляет первой вращающейся машиной MG1 на основе обнаруженного результата резольвера 35. Резольвер 36 обнаруживает скорость вращения или положение вращения ротора Rt2 второй вращающейся машины MG2. ЭБУ 50 управляет второй вращающейся машиной MG2 на основе обнаруженного результата резольвера 36.
[0078] Устройство 60 сцепления для взаимного зацепления, а также устройство 60 сцепления для взаимного зацепления согласно первому варианту выполнения, функционирует в качестве тормозного устройства, которое ограничивает вращение первого солнечного зубчатого колеса 11. Управление сцеплением устройства 60 сцепления для взаимного зацепления может быть подобно управлению сцеплением первого варианта выполнения.
[0079] Далее третий вариант выполнения будет описан со ссылкой на Фиг. 13. В третьем варианте выполнения одинаковые ссылочные позиции обозначают компоненты, имеющие функции, подобные функциям компонентов, описанных в первом варианте выполнения или втором варианте выполнения, а совпадающее описание исключено. Фиг. 13 представляет собой схематический вид конфигурации транспортного средства согласно третьему варианту выполнения. Система 102 приведения в движение транспортного средства согласно третьему варианту выполнения отличается от системы 101 приведения в движение транспортного средства согласно второму варианту выполнения тем, что возможна блокировка повышающей передачи. Блокировка повышающей передачи обозначает состояние, когда передаточное отношение между скоростью вращения двигателя и скоростью вращения выходного вала 33 зафиксирована на заданном передаточном отношении повышающей передачи.
[0080] Как показано на Фиг. 13, вторая планетарная зубчатая передача 20 относится к двухсателлитному типу. Вторые сателлиты 22 образованы парами зубчатых колес 22a, 22b. Каждый внутренний сателлит 22а находится в зацеплении со вторым солнечным зубчатым колесом 21 и соответствующим одним из внешних сателлитов 22b. Каждый внешний сателлит 22b находится в зацеплении с соответствующим одним из внутренних сателлитов 22а и вторым кольцевым зубчатым колесом 23.
[0081] Первое водило 14 соединено со вторым кольцевым зубчатым колесом 23 и вращается за одно целое со вторым кольцевым зубчатым колесом 23. Первое кольцевое зубчатое колесо 13 соединено со вторым водилом 24 и вращается за одно целое со вторым водилом 24. Как и в случае системы 101 приведения в движение транспортного средства согласно второму варианту выполнения, вторая вращающаяся машина MG2 соединена с выходным валом 33 с помощью блока 34 передачи.
[0082] Устройство 60 сцепления для взаимного зацепления функционирует в качестве тормозного устройства, которое ограничивает вращение второго солнечного зубчатого колеса 21. В расцепленном состоянии устройства 60 сцепления для взаимного зацепления ЭБУ 50 заставляет первую вращающуюся машину MG1 функционировать в качестве приемника силы реакции на крутящий момент двигателя. Первая вращающаяся машина MG1 заставляет крутящий момент двигателя выдаваться с первого кольцевого зубчатого колеса 13 к выходному валу 33 путем выдачи крутящего момента силы реакции.
[0083] В сцепленном состоянии устройства 60 сцепления для взаимного зацепления вращение второго солнечного зубчатого колеса 21 ограничено. Таким образом, второе солнечное зубчатое колесо 21 функционирует в качестве приемника силы реакции на крутящий момент двигателя и заставляет крутящий момент двигателя выдаваться с первого кольцевого зубчатого колеса 13 к выходному валу 33. При ограничении вращения второго солнечного зубчатого колеса 21 отношение между скоростью вращения первого водила 14 и скоростью вращения первого кольцевого зубчатого колеса 13 является фиксированным. В первой планетарной зубчатой передаче 10 устанавливается состояние повышающей передачи. В состоянии повышающей передачи скорость вращения первого кольцевого зубчатого колеса 13 выше, чем скорость вращения первого водила 14 и скорость вращения двигателя 1. Отношение скорости вращения (передаточное отношение) в это время является фиксированным. При установке блокированного состояния повышающей передачи при высокой скорости транспортного средства или т.п. возможно подавлять возникновение циркуляции мощности. Управление сцеплением устройства 60 сцепления для взаимного зацепления может быть, например, подобно управлению сцеплением согласно первому варианту выполнения.
[0084] Далее четвертый вариант выполнения будет описан со ссылкой на Фиг. 14. В четвертом варианте выполнения одинаковые ссылочные позиции обозначают компоненты, имеющие функции, подобные функциям компонентов, описанных в любом из первого - третьего вариантов выполнения, а совпадающее описание исключено. Фиг. 14 представляет собой схематический вид конфигурации транспортного средства согласно четвертому варианту выполнения. Система 103 приведения в движение транспортного средства согласно четвертому варианту выполнения отличается от системы 102 приведения в движение транспортного средства согласно третьему варианту выполнения тем, что переключение между передаточным отношением нижней стороны и передаточным отношением верхней стороны выполняется во второй планетарной зубчатой передаче 20.
[0085] Как показано на Фиг. 14, вторая планетарная зубчатая передача 20 относится к двухсателлитному типу и включает в себя второе солнечное зубчатое колесо 21, вторые сателлиты 22, второе кольцевое зубчатое колесо 23 и второе водило 24. Каждый из вторых сателлитов 22 включает в себя пару зубчатых колес 22а, 22b. Каждый внутренний сателлит 22а находится в зацеплении со вторым солнечным зубчатым колесом 21 и соответствующим одним из внешних сателлитов 22b. Каждый внешний сателлит 22b находится в зацеплении с соответствующим одним из внутренних сателлитов 22а и вторым кольцевым зубчатым колесом 23. Первое кольцевое зубчатое колесо 13 соединено со вторым кольцевым зубчатым колесом 23 и вращается за одно целое со вторым кольцевым зубчатым колесом 23. Второе водило 24 соединено с выходным валом 33. Устройство 80 сцепления для взаимного зацепления включает в себя золотник 81, втулку 82, первую часть 83, вторую часть 84, привод 85 и блок 86 управления. Механизм 87 сцепления включает в себя золотник 81, втулку 82, первую часть 83 и вторую часть 84. Золотник 81 является подвижным в аксиальном направлении. Золотник 81 имеет собачки на его внутренней периферии.
[0086] Втулка 82 соединена со вторым солнечным зубчатым колесом 21 и вращается за одно целое со вторым солнечным зубчатым колесом 21. Первая часть 83 прикреплена к стороне корпуса транспортного средства так, чтобы быть невращаемой. Вторая часть 84 соединена с выходным валом 33 и вращается за одно целое с выходным валом 33. Каждая из втулки 82, первой части 83 и второй части 84 имеет внешние собачки. Втулка 82, первая часть 83 и вторая часть 84 размещены друг за другом коаксиально с выходным валом 33. Втулка 82 размещена между первой частью 83 и второй частью 84. Собачки втулки 82, первой части 83 и второй части 84 спарены с собачками золотника 81. Привод 85 представляет собой приводное устройство, которое перемещает золотник 81 в аксиальном направлении.
[0087] Привод 85, например, прикладывает усилие к золотнику 81 в аксиальном направлении с использованием электромагнитной силы. Конфигурация привода 85 может быть, например, такой же или подобной конфигурации привода 70 согласно первому варианту выполнения. Привод 85 способен выборочно прикладывать усилие к перемещающемуся элементу в направлении D1 (далее называемом «первое направление») или усилие к перемещающемуся элементу в направлении (далее называемому «второе направление»). Первое направление D1 представляет собой направление, в котором золотник 81 сцепляется с первой частью 83. Второе направление D2 представляет собой направление, в котором золотник 81 сцепляется со второй частью 84. Устройство 80 сцепления для взаимного зацепления имеет первый стопор и второй стопор. Первый стопор обеспечен в положении максимального хода перемещающегося элемента во время приложения приводом 85 усилия в первом направлении D1. Второй стопор обеспечен в положении максимального хода перемещающегося элемента во время приложения приводом 85 усилия во втором направлении D2.
[0088] Устройство 80 сцепления для взаимного зацепления переключается между расцепленным состоянием, первым сцепленным состоянием (81a) и вторым сцепленным состоянием (81b) на основе положения золотника 81 в аксиальном направлении. Расцепленное состояние устройства 80 сцепления для взаимного зацепления представляет собой состояние, когда золотник 81 находится в зацеплении с втулкой 82 и не находится в зацеплении с первой частью 83 или второй частью 84. В расцепленном состоянии двигатель 1 и первая вращающаяся машина MG1 отсоединены от выходного вала 33. Первое сцепленное состояние устройства 80 сцепления для взаимного зацепления представляет собой состояние, когда золотник 81 находится в зацеплении с втулкой 82 и первой частью 83 и не находится в зацеплении со второй частью 84. В первом сцепленном состоянии вращение первого солнечного зубчатого колеса 11 ограничено. Скорость вращения второго водила 24, которое представляет собой выходной вращающийся элемент второй планетарной зубчатой передачи 20, становится выше, чем скорость вращения второго кольцевого зубчатого колеса 23, которое представляет собой входной вращающийся элемент второй планетарной зубчатой передачи 20. То есть, во второй планетарной зубчатой передаче 20 скорость вращения, которая представляет собой вход от двигателя 1, увеличивается и представляет собой выход к выходному валу 33.
[0089] Второе сцепленное состояние устройства 80 сцепления для взаимного зацепления представляет собой состояние, когда золотник 81 находится в зацеплении с втулкой 82 и второй частью 84 и не находится в зацеплении с первой частью 83. Во втором сцепленном состоянии второе солнечное зубчатое колесо 21 соединено со вторым водилом 24, и дифференциальное вращение второй планетарной зубчатой передачи 20 ограничено. Таким образом, во второй планетарной зубчатой передаче 20 скорость вращения, которая представляет собой вход от двигателя 1, не уменьшается или увеличивается и представляет собой выход к выходному валу 33 с постоянной скоростью. Таким образом, в устройстве 80 сцепления для взаимного зацепления передаточное отношение второй планетарной зубчатой передачи 20 во втором сцепленном состоянии ниже по скорости, чем передаточное отношение второй планетарной зубчатой передачи 20 в первом сцепленном состоянии.
[0090] Односторонняя муфта 37 обеспечена между вторым солнечным зубчатым колесом 21 и выходным валом 33. Односторонняя муфта 37 ограничивает так, что скорость вращения второго солнечного зубчатого колеса 21 становится выше, чем скорость вращения выходного вала 33.
[0091] Устройство 80 сцепления для взаимного зацепления согласно настоящему варианту выполнения отличается от устройства 60 сцепления для взаимного зацепления согласно первому варианту выполнения и способно функционировать не только в качестве тормозного устройства, которое ограничивает вращение втулки 82, но и функционировать в качестве устройства муфты, которое сцепляет роторы друг с другом. В первом сцепленном состоянии устройства 80 сцепления для взаимного зацепления золотник 81 ограничивает вращение втулки 82 путем соединения втулки 82 с первой частью 83. С другой стороны, во втором сцепленном состоянии устройства 80 сцепления для взаимного зацепления золотник 81 заставляет второе солнечное зубчатое колесо 21 и выходной вал 33 вращаться за одно целое путем соединения втулки 82 со второй частью 84.
[0092] Блок 86 управления устанавливает устройство 80 сцепления для взаимного зацепления в любое из расцепленного состояния, первого сцепленного состояния и второго сцепленного состояния на основе состояния перемещения или т.п. Блок 86 управления выполняет управление сцеплением, когда блок 86 управления переключает устройство 80 сцепления для взаимного зацепления из расцепленного состояния в первое сцепленное состояние или второе сцепленное состояние. Блок 86 управления выполняет первое управление с возможностью установки усилия привода 85 равным усилию в первой области R1 во время сцепления устройства 80 сцепления для взаимного зацепления. Блок 86 управления выполняет второе управление с возможностью установки усилия привода 85 равным усилию, большему, чем усилие при первом управлении, при возникновении состояния остановки на половине пути механизма 87 сцепления в результате первого управления. Второе управление желательно представляет собой управление с возможностью полного сцепления механизма 87 сцепления.
[0093] Первая область R1 согласно настоящему варианту выполнения, а также первая область R1 согласно первому варианту выполнения больше, чем толкающая сила возвратной пружины в положении хода перемещающегося элемента и меньше, чем сумма толкающей силы возвратной пружины в положении хода и максимальной толкающей силы, которая генерируется пружиной передачи в положении хода в случае, когда перемещение золотника 81 ограничено.
[0094] При устройстве 80 сцепления для взаимного зацепления согласно настоящему варианту выполнения возможно обеспечивать реагирование во время переключения механизма 87 сцепления в первое сцепленное состояние или второе сцепленное состояние, и также уменьшать шум столкновения между перемещающимся элементом и каждым стопором.
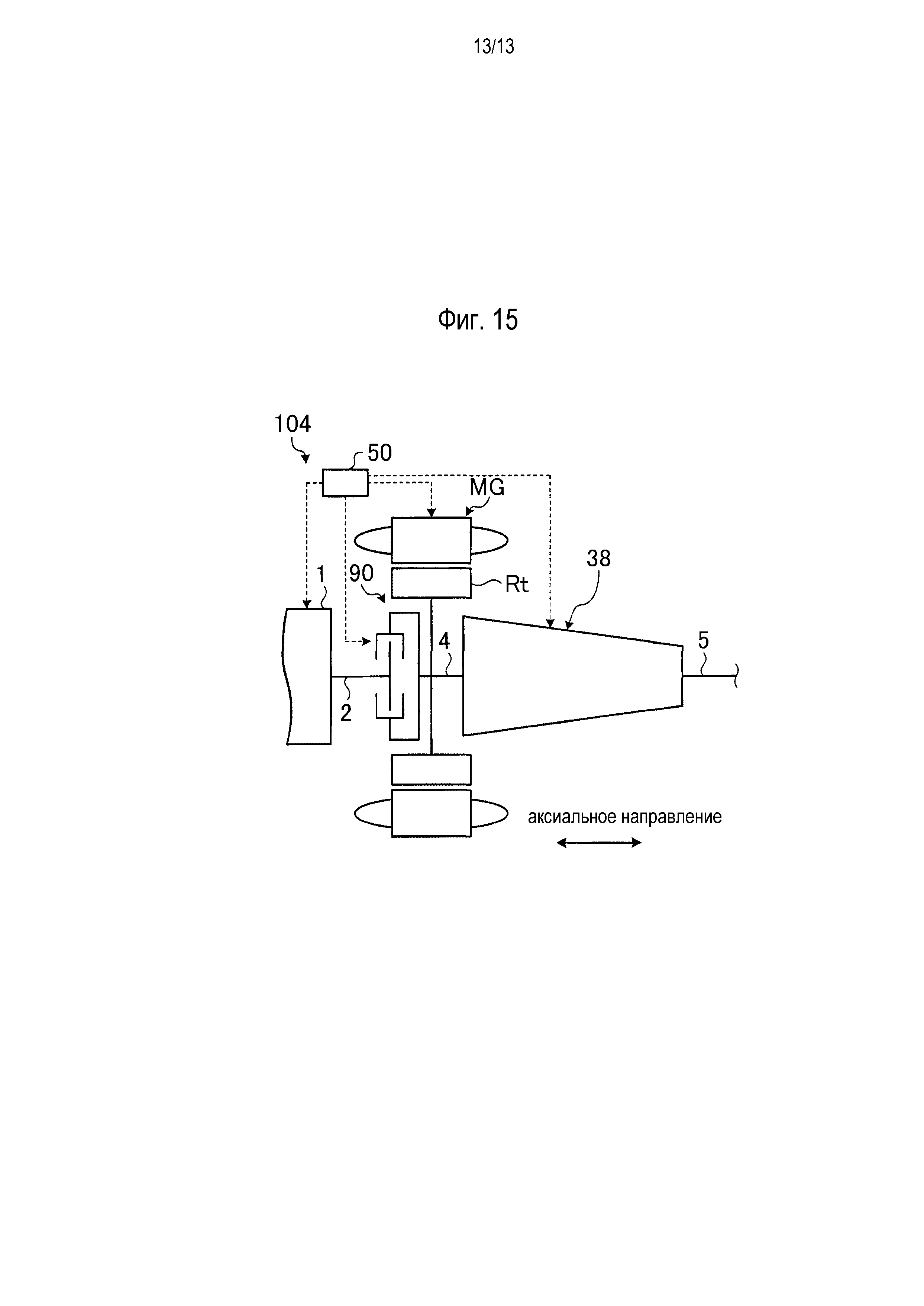
[0095] Далее пятый вариант выполнения будет описан со ссылкой на Фиг. 15. В пятом варианте выполнения одинаковые ссылочные позиции обозначают компоненты, имеющие функции, подобные функциям компонентов, описанных в любом из первого - четвертого вариантов выполнения, и совпадающее описание исключено. Фиг. 15 представляет собой схематический вид конфигурации транспортного средства согласно пятому варианту выполнения. Система 104 приведения в движение транспортного средства согласно пятому варианту выполнения отличается от систем 100, 101, 102, 103 приведения в движение транспортного средства согласно первому - четвертому вариантам выполнения, например, тем, что количество вращающихся машин MG равно одному, и устройство 80 сцепления для взаимного зацепления соединяет двигатель 1 с вращающейся машиной MG или отсоединяет двигатель 1 от вращающейся машины MG.
[0096] Как показано на Фиг. 15, входной вал 2 и вращающийся вал 4 ротора Rt вращающейся машины MG соединены друг с другом с помощью устройства 90 сцепления для взаимного зацепления. Конфигурация устройства 90 сцепления для взаимного зацепления может являться, например, такой же или подобной конфигурации устройства 60 сцепления для взаимного зацепления согласно первому варианту выполнения. Устройство 90 сцепления для взаимного зацепления соединяет входной вал 2 с вращающимся валом 4 при сцеплении и отсоединяет входной вал 2 от вращающегося вала 4 при расцеплении. Вращающийся вал 4 соединяется с выходным валом 5 с помощью блока 38 передачи. Выходной вал 5 соединяется с ведущими колесами с помощью механизма редуктора или блока дифференциала. Блок 38 передачи представляет собой, например, механизм ступенчатой передачи или механизм бесступенчатой передачи. ЭБУ 50 устанавливает устройство 90 сцепления для взаимного зацепления в расцепленное состояние при перемещении транспортного средства в режиме движения EV с использованием мощности вращающейся машины MG или при перемещении транспортного средства по инерции. ЭБУ 50 устанавливает устройство 90 сцепления для взаимного зацепления в сцепленное состояние при перемещении транспортного средства в режиме движения HV с использованием мощности двигателя 1. ЭБУ 50 выполняет управление сцеплением устройства 90 сцепления для взаимного зацепления, когда ЭБУ 50 переключает устройство 90 сцепления для взаимного зацепления из расцепленного состояния в сцепленное состояние. Управление сцеплением устройства 90 сцепления для взаимного зацепления является, например, подобным управлению сцеплением устройства 60 сцепления для взаимного зацепления согласно первому варианту выполнения.
[0097] Далее будет описан первый альтернативный вариант выполнения для каждого из вышеуказанных вариантов выполнения. В первом - пятом вариантах выполнения усилие привода 70 или привода 85 при втором управлении устанавливается на усилии во второй области R2; однако усилие привода 70 или привода 85 не ограничено усилием во второй области R2. Усилию привода 70 или привода 85 при втором управлении только необходимо быть больше, чем усилие при первом управлении. При выполнении управления изменением крутящего момента при втором управлении исключение состояния остановки на половине пути облегчается. При втором управлении становится легко исключать состояние остановки на половине пути за счет синергического эффекта установки усилия привода 70 или привода 85 равным значению, большему, чем усилие при первом управлении, в совокупности с управлением изменением крутящего момента.
[0098] Далее будет описан второй альтернативный вариант выполнения для каждого из вышеуказанных вариантов выполнения. В каждом из вышеуказанных вариантов выполнения значение командного тока к приводу 70 или приводу 85 является постоянным при первом управлении и втором управлении; однако значение командного тока к приводу 70 или приводу 85 не ограничено этой конфигурацией. Значение командного тока к приводу 70 или приводу 85 может быть изменяемым. Например, при первом управлении значение командного тока может регулироваться так, что усилие привода 70 поддерживается на значении в первой области R1. В этом случае желательно регулировать значение командного тока на основе обнаруженного значения или расчетного значения величины Sta хода перемещающегося элемента 66, включающего в себя якорь 64.
[0099] Далее будет описан третий альтернативный вариант выполнения для каждого из вышеуказанных вариантов выполнения. В каждом из вышеуказанных вариантов выполнения усилие привода 70 или привода 85 при втором управлении может быть определено на основе величины Sta хода перемещающегося элемента. Как и в случае первого варианта выполнения, при установке усилия привода 70 при втором управлении равным усилию во второй области R2 (смотри Фиг. 10), возможно продолжать выполнение хода перемещающегося элемента 66 независимо от режима состояния остановки на половине пути. Среди различных состояний остановки на половине пути в состоянии остановки на половине пути, в котором кромки 61c, 62c зубьев собачек 61a, 62a контактируют друг с другом, толкающая сила пружины 71 передачи становится максимальной. При установке усилия привода 70 так, чтобы быть способным выполнять ход перемещающегося элемента 66, противодействуя толкающей силе возвратной пружины 72 и толкающей силе пружины 71 передачи, возможно улучшать надежность и реагирование сцепления. Однако в состоянии остановки на половине пути существует случай, когда требуется не такое большое усилие.
[0100] Усилие при втором управлении может быть определено на основе величины Sta хода перемещающегося элемента 66. Возможно рассчитывать величину сжатия пружины 71 передачи от величины Sta хода перемещающегося элемента 66 и величины хода золотника 61. Усилие привода 70 при втором управлении может быть определено на основе расчетного результата величины сжатия. Усилие при втором управлении желательно устанавливается на большем значении при увеличении расчетной величины сжатия. Усилие при втором управлении желательно больше, чем сумма толкающей силы возвратной пружины 72 при величине хода перемещающегося элемента 66 и толкающей силы, основанной на расчетной величине сжатия пружины 71 передачи при величине хода.
[0101] Далее будет описан четвертый альтернативный вариант выполнения для каждого из вышеуказанных вариантов выполнения. В каждом из вышеуказанных вариантов выполнения привод 70 или привод 85 представляет собой электромагнитный привод; однако привод 70 или привод 85 не ограничен электромагнитным приводом. Привод 70 или привод 85 может генерировать усилие с помощью гидравлического давления или т.п. вместо генерирования усилия с использованием электромагнитной силы. При генерировании усилия с использованием гидравлического давления или т.п. усилие привода 70 или привода 85 может устанавливается на постоянном значении или может быть изменяемым с величиной хода золотника или величиной хода перемещающегося элемента. Например, усилие привода 70 или привода 85 может увеличиваться при увеличении величины хода золотника или перемещающегося элемента.
[0102] В каждом из вышеуказанных вариантов выполнения вместо двигателя 1 может быть установлен другой источник мощности. Конфигурации, описанные в вышеуказанных вариантах выполнения и альтернативных вариантах выполнения, могут быть осуществлены в совокупности при необходимости.
Реферат
Устройство сцепления для взаимного зацепления содержит механизм сцепления (63), включающий часть (62) и золотник (61). Механизм сцепления (63) выполнен с возможностью сцепления или расцепления при относительном перемещении части (62) и золотника (61) в аксиальном направлении. Устройство сцепления содержит перемещающийся элемент (66), привод (70), пружину передачи (71), возвратную пружину (72), стопор (73), блок управления (74). Блок управления (74) выполнен с возможностью во время сцепления механизма сцепления (63) выполнения первого управления для установки усилия привода (70) равным усилию в первой области. При возникновении состояния остановки на половине пути механизма сцепления (63) в результате первого управления, выполнение второго управления для установки усилия привода равным усилию, большему, чем усилие при первом управлении. Первая область представляет собой диапазон, в котором усилие привода в положении хода перемещающегося элемента больше, чем толкающая сила возвратной пружины, причем первая область представляет собой диапазон, в котором усилие привода меньше, чем сумма толкающей силы возвратной пружины в положении хода и максимальной толкающей силы, которая генерируется пружиной передачи в положении хода в случае, когда перемещение золотника ограничено. Достигается уменьшение шума столкновения из-за столкновения между перемещающимся элементом и стопором. 4 з.п. ф-лы, 15 ил.
Формула
механизм сцепления, который представляет собой механизм взаимного зацепления, включающий в себя часть и золотник, причем механизм сцепления выполнен с возможностью сцепления или расцепления при относительном перемещении части и золотника в аксиальном направлении;
перемещающийся элемент, выполненный с возможностью перемещения в аксиальном направлении;
привод, выполненный с возможностью приложения усилия к перемещающемуся элементу в направлении, в котором золотник сцепляется с частью;
пружину передачи, помещенную между перемещающимся элементом и золотником, причем пружина передачи выполнена с возможностью передачи усилия привода от перемещающегося элемента к золотнику;
возвратную пружину, выполненную с возможностью приложения толкающей силы к перемещающемуся элементу в направлении, противоположном направлению усилия привода;
стопор, обеспеченный в положении максимального хода перемещающегося элемента, причем стопор выполнен с возможностью остановки перемещающегося элемента; и
электронный блок управления, выполненный с возможностью управления приводом,
при этом устройство сцепления для взаимного зацепления отличается тем, что электронный блок управления выполнен с возможностью:
(i) во время сцепления механизма сцепления выполнения первого управления для установки усилия привода равным усилию в первой области, и
(ii) при возникновении состояния остановки на половине пути механизма сцепления в результате первого управления, выполнения второго управления для установки усилия привода равным усилию, большему, чем усилие при первом управлении, причем первая область представляет собой диапазон, в котором усилие привода в положении хода перемещающегося элемента больше, чем толкающая сила возвратной пружины, и причем первая область представляет собой диапазон, в котором усилие привода меньше, чем сумма толкающей силы возвратной пружины в положении хода и максимальной толкающей силы, которая генерируется пружиной передачи в положении хода в случае, когда перемещение золотника ограничено.
электронный блок управления выполнен с возможностью установки усилия, большего, чем усилие в первой области, для усилия привода при втором управлении.
привод выполнен с возможностью притягивания перемещающегося элемента с использованием электромагнитной силы, и
электронный блок управления выполнен с возможностью:
(i) установки первого значения командного тока для значения командного тока при первом управлении, причем значение командного тока подается к приводу при первом управлении,
(ii) установки второго значения командного тока, большего, чем первое значение командного тока, для значения командного тока при втором управлении, причем значение командного тока подается к приводу при втором управлении, и
(iii) выполнения упреждающего управления с использованием первого значения командного тока и второго значения командного тока.
электронный блок управления выполнен с возможностью установки третьего значения командного тока для значения командного тока при управлении током удержания для поддержания механизма сцепления в полностью сцепленном состоянии, причем значение командного тока подается к приводу при управлении током удержания, и третье значение командного тока представляет собой значение тока, меньшее, чем первое значение командного тока.
электронный блок управления выполнен с возможностью:
(i) управления вращающейся машиной, соединенной с частью, и
(ii) выполнения управления изменением крутящего момента для изменения выходного крутящего момента вращающейся машины при втором управлении.
Комментарии