Система отсоединения силового привода - RU2731046C2
Код документа: RU2731046C2
Чертежи
Описание
Область техники
Настоящее изобретение относится к системам приводов и, в частности, к отсоединению электродвигателя от трансмиссии привода.
Уровень техники
Система приводов может содержать, как правило, приводной электродвигатель, который соединен посредством трансмиссии привода с выходом привода, представленным в виде цилиндра, рычага или винтового домкрата, причем выход привода соединен посредством соответствующего соединения с подвижным элементом. Подобные системы широко используются, например, в авиационных системах, где, как правило, привод может быть подключен к элементу управления или другой подвижной поверхности, такой как клапан, спойлер, дверка и так далее. Иногда необходимо выполнить техническое обслуживание системы или исполнительного компонента. В таких условиях для обслуживающего персонала был бы потенциально опасен случай, когда приводной двигатель во время функционирования вынуждал бы перемещаться трансмиссию привода и компонент.
Настоящее раскрытие призвано смягчить эту проблему.
Сущность изобретения
Исходя из первого аспекта настоящего изобретения предусматривается система отсоединения силового привода, содержащая:
корпус
приводную муфту, установленную в корпусе, причем приводная муфта соединяет приводной электродвигатель с трансмиссией привода; и
управляемый вручную механизм отсоединения привода для выборочного перемещения приводной муфты из первого положения, в котором она соединяет электродвигатель и трансмиссию привода, и вторым положением, в котором электродвигатель и трансмиссия привода разъединены;
механизм отсоединения привода, содержащий рабочий элемент, который вручную выдвигается из корпуса для перемещения приводной муфты из первого положения во второе положение.
Таким образом, помимо того, что электродвигатель будет отсоединяться от трансмиссии привода, но и отвод рабочего элемента может выступать в качестве видимого признака, что двигатель отсоединен.
Корпус и рабочий элемент могут быть снабжены взаимосцепляющимися конструкциями для удержания рабочего элемента в его выдвинутом положении.
Рабочий элемент может содержать деталь головки, которая способна поворачиваться так, чтобы приводить стопорные конструкции в зацепление.
Деталь рабочего элемента, выдвинутая из корпуса, может быть обеспечена пометками, например цветовыми, которые могут быстро сообщать оператору, что рабочий элемент выдвинут и электродвигатель отсоединен.
Приводная муфта может содержать соединительный элемент, например, муфту передачи, которая способна перемещаться в осевом направлении от выхода двигателя и до входа трансмиссии привода для разъединения электродвигателя и трансмиссии привода.
Приводная муфта может смещаться в сторону ее первого положения.
Механизм отсоединения привода может содержать разъединительный элемент, функционально соединенный с рабочим элементом и приводным соединительным элементом для перемещения приводного соединительного элемента из первого положения во второе положение, когда рабочий элемент выдвинут из корпуса.
Разъединительный элемент может содержать элемент, который монтируется вокруг соединительного элемента и входит в зацепление с соединительным элементом для обеспечения движения.
Соединительный элемент может содержать фланец, например на одном его торце, и указанный разъединительный элемент входит в зацепление с фланцем для обеспечения движения.
Как правило, рабочий элемент будет выполнен с возможностью перемещения вдоль оси, под углом, например, 90° к оси соединительного элемента и разъединительного элемента, таким образом может быть предусмотрен передаточный механизм для преобразования движения разъединительного элемента в требуемое осевое перемещение разъединительного элемента.
Передаточный механизм может содержать кулачковый механизм.
В одном из вариантов реализации изобретения рама соединена с рабочим элементом для приема разъединительного элемента, при этом предусматриваются одно или более кулачковых соединений между рамой и разъединительным элементом.
В одном примере на разъединительном элементе может быть выполнен скошенный паз, и предусматриваться штифт на раме и разъединительный элемент, сцепляющийся с пазом, в результате чего движение рамы посредством рабочего элемента вынуждает штифт перемещаться вдоль паза, тем самым обеспечивая осевое перемещение разъединительного элемента и, как следствие, приводной муфты.
Рама может, например, содержать оппозитные, параллельные стороны, которые размещают с возможностью скольжения противоположные поверхности разъединительного элемента, при этом кулачковые конструкции предусматриваются между противоположными сторонами и противоположными поверхностями.
Когда приводная муфта находится в зацеплении, может формироваться зазор между разъединительным элементом и приводной муфтой для избежания потерь на трение в сцеплении.
Механизм отсоединения может быть размещен внутри полости, которая закрывается посредством крышки, и которая должна быть открыта для обеспечения доступа к рабочему элементу. Рабочий элемент в его выдвинутом положении может располагаться так, чтобы создавать помехи крышке для предотвращения закрытия указанной крышки, пока электродвигатель отсоединен от трансмиссии привода.
Настоящее изобретение также распространяется на способ выполнения технического обслуживания системы приводов, которая содержит электродвигатель и трансмиссию привода, включающий отсоединение электродвигателя и трансмиссии привода, например посредством системы отсоединения силового привода как обсуждалось в предыдущих пунктах.
Электродвигатель может быть отсоединен от трансмиссии привода посредством рабочего элемента, который вручную выдвигается из корпуса для осуществления разъединения.
Выдвинутый рабочий элемент может быть расположен таким образом, что он является помехой крышке полости, содержащей привод, для не допущения закрытия крышки, когда электродвигатель отсоединен от трансмиссии привода.
Краткое описание графических материалов
Не ограничивающий вариант реализации настоящего изобретения будет описан ниже со ссылкой на прилагаемые графические материалы, на которых:
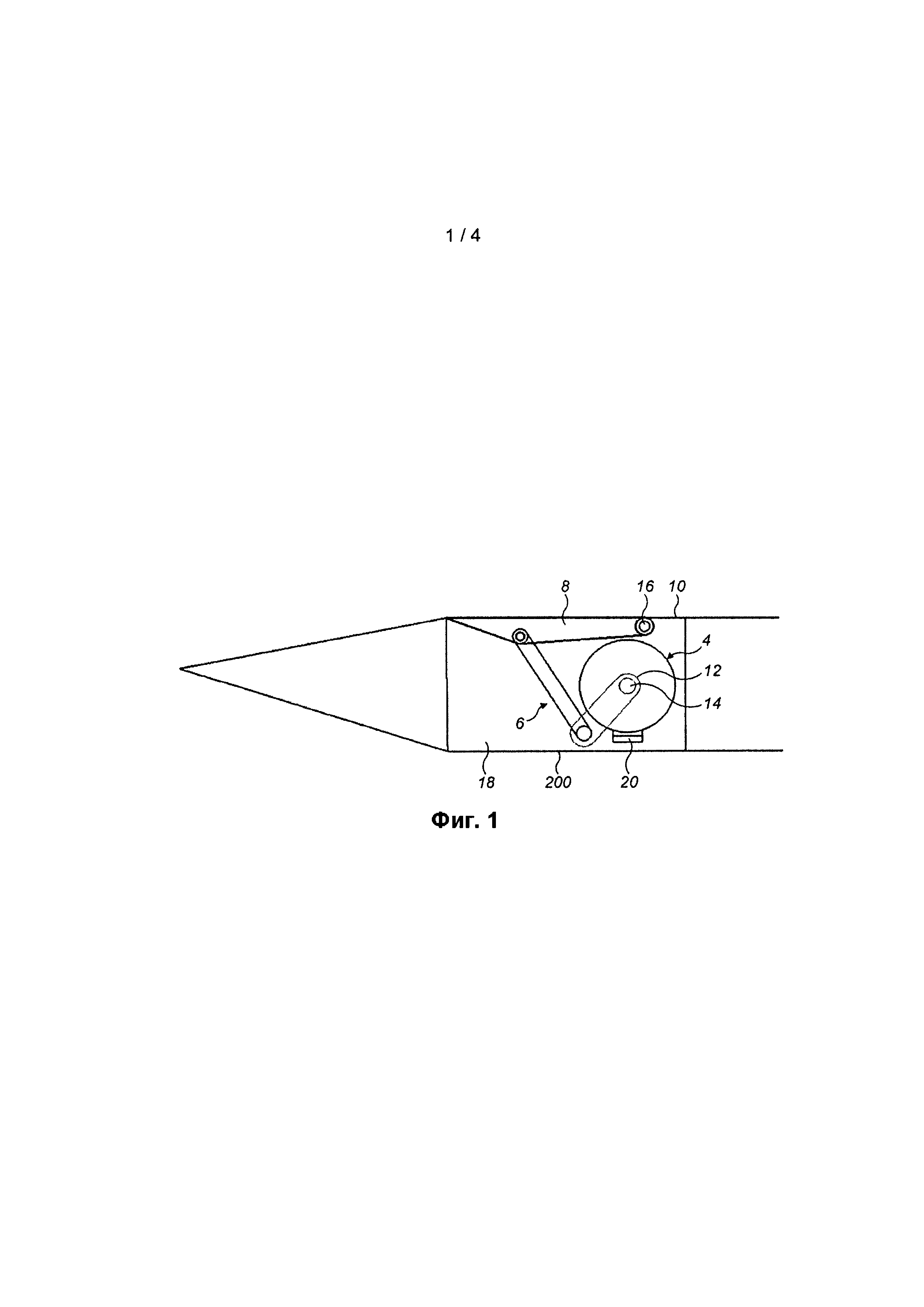
Фигура 1 иллюстрирует устройство, содержащее систему приводов, содержащую систему отсоединения в соответствии с настоящим изобретением;
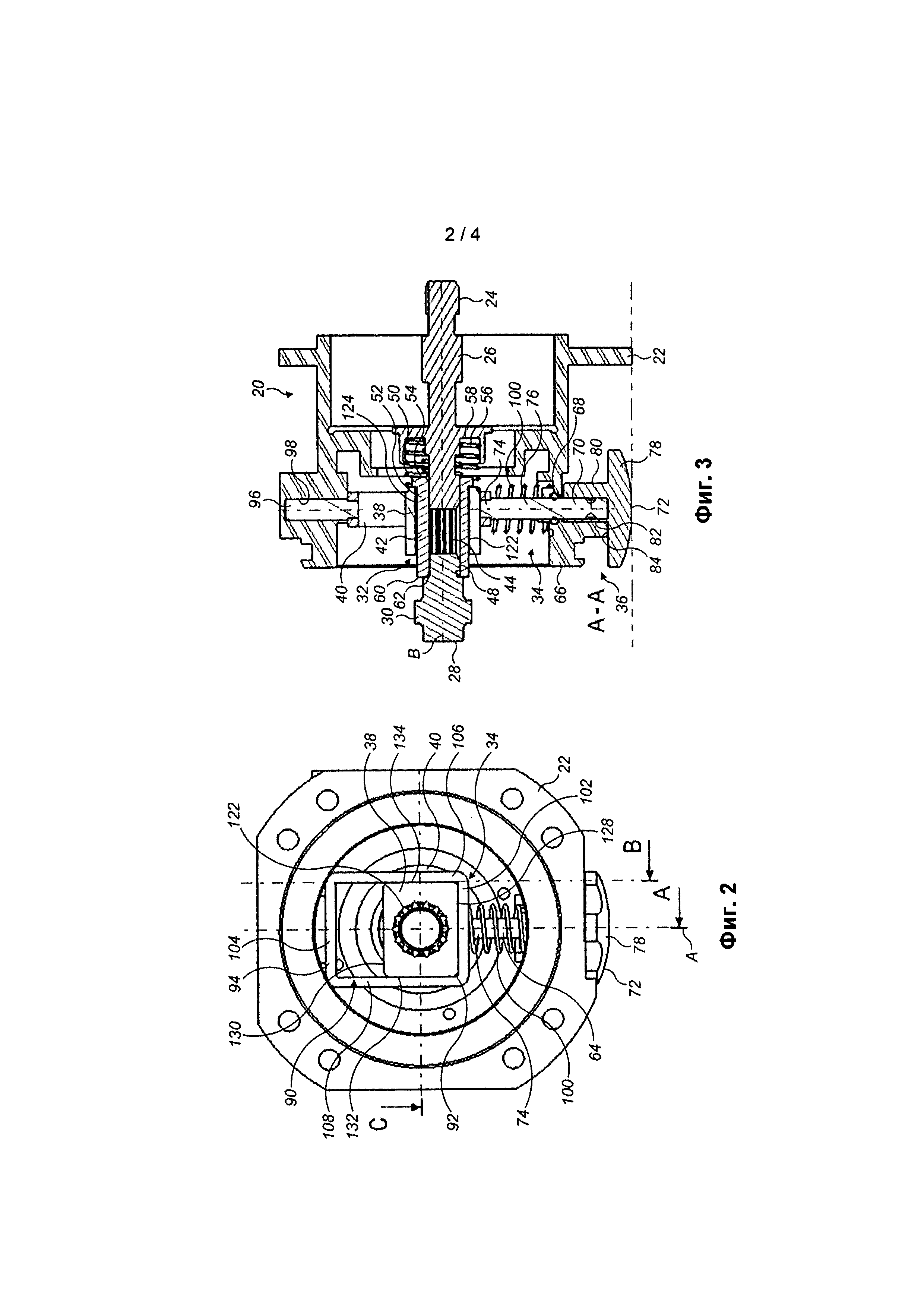
Фигура 2 иллюстрирует вид в поперечном сечении системы отсоединения в соответствии с настоящим изобретением;
Фигура 3 иллюстрирует вид в продольном сечении системы отсоединения по Фигуре 2 вдоль линии А-А в первом рабочем состоянии;
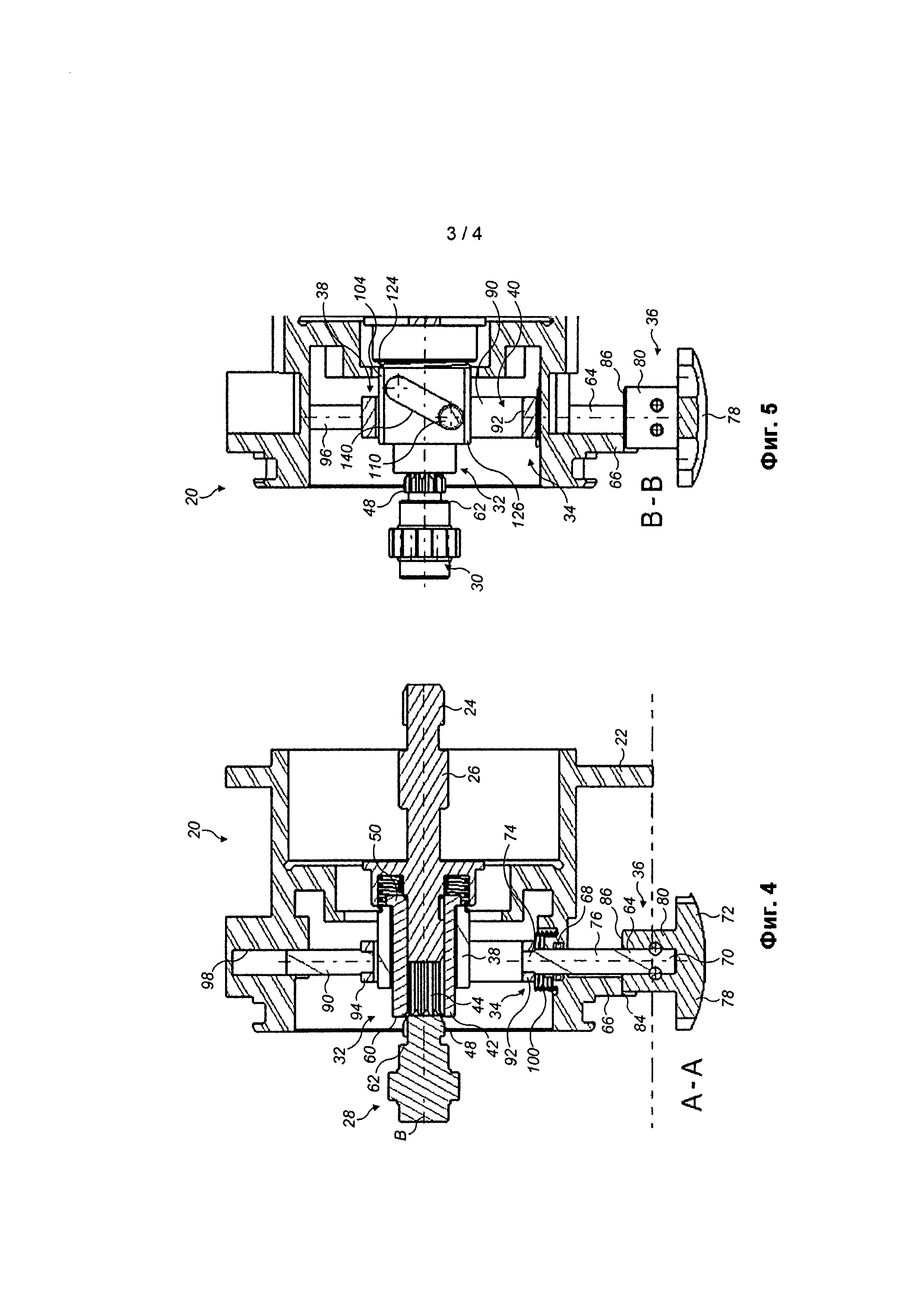
Фигура 4 иллюстрирует вид в поперечном сечении системы отсоединения по Фигуре 2 вдоль линии А-А во втором рабочем состоянии;
Фигура 5 иллюстрирует вид в поперечном сечении вдоль линии В-В по Фигуре 2, на которой система отсоединения находится во втором рабочем состоянии, показанном на Фигуре 4;
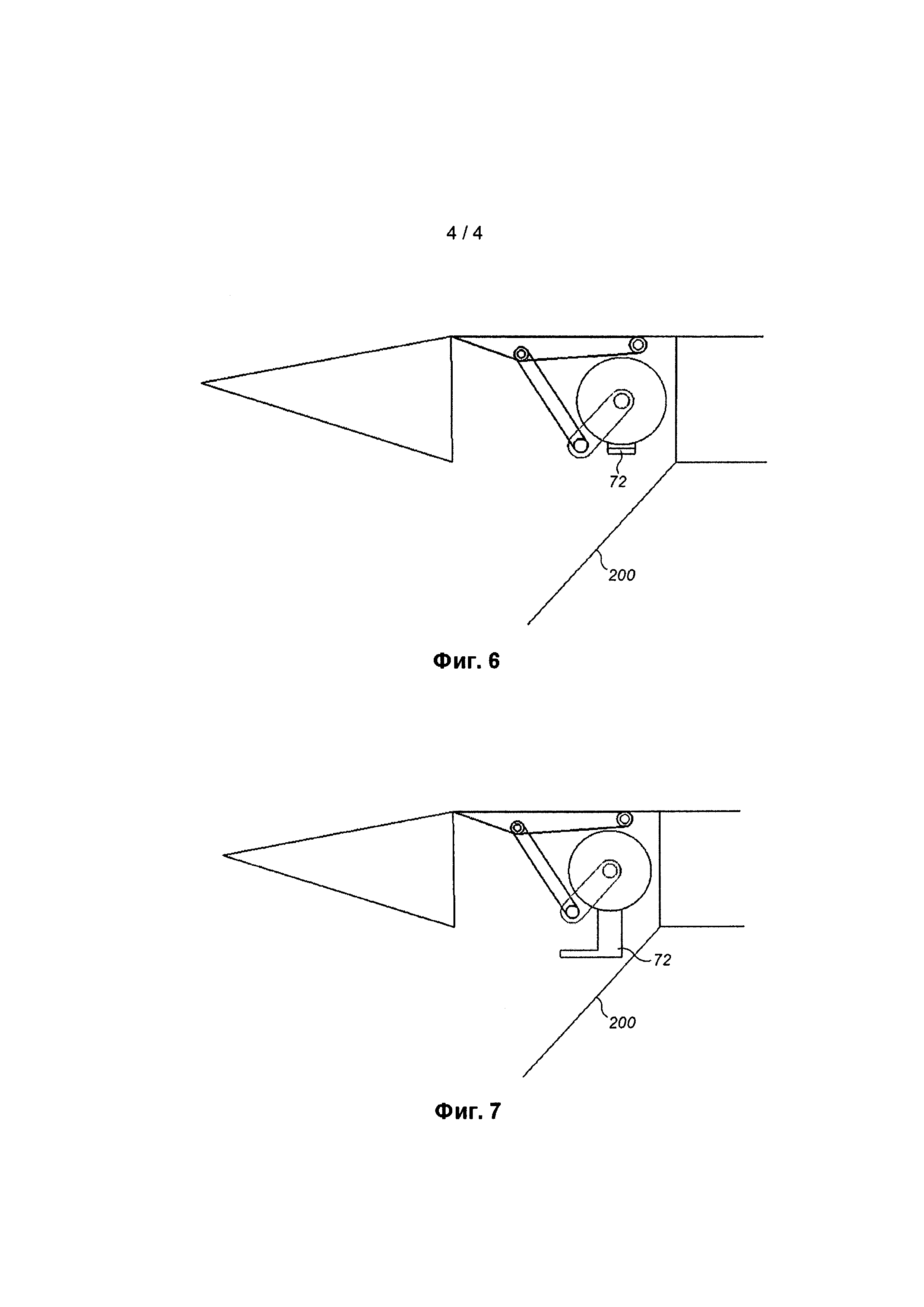
Фигура 6 иллюстрирует устройство по Фигуре 1 во втором рабочем состоянии; и Фигура 7 иллюстрирует устройство но Фигуре 1 в третьем рабочем состоянии.
Подробное описание изобретения
Фигура 1 иллюстрирует примерную систему воздушного судна 2, которая содержит привод 4. В этом случае привод 4 соединен с передаточным механизмом 6, который приводит в действие створку спойлера 8, предусмотренную на поверхности крыла 10 воздушного судна. Конечно, это не является ограничивающим применением, и настоящее изобретение может быть применено к любой системе приводов. Изобретение находит конкретное применение в авиастроении, где большое разнообразие поверхностей управления, крышек и т.д. приводятся в движение приводами. Кроме того, привод 4 не должен быть соединен с передаточным механизмом 6, в том виде, как показано, но с любым механизмом, который приводит в движение створку 8.
Привод 4 содержит поворотный двигатель 12, например, поворотный электродвигатель 12, при этом вращение двигателя 12 приводит к вращению выхода привода 14, который вызывает движение передаточного механизма 6 и, тем самым, вращение створки 8 вокруг оси поворота 16.
Иногда необходимо выполнять техническое обслуживание таких систем. При выполнении технического обслуживания, эксплуатация двигателя 10 может привести к травмам технического персонала. Поэтому желательно гарантировать, что этого не произойдет.
Для достижения этой цели в вариантах реализации настоящего изобретения система отсоединения привода 20 установлена в определенном месте в трансмиссии привода между двигателем 12 и выходом привода 14. Примерная система отсоединения будет теперь описана со ссылкой на Фигуры 2-5.
Как показано, система отсоединения 20 содержит корпус 22, который может быть установлен или предусмотрен в любом удобном месте в трансмиссии между двигателем 20 и выходом привода 14. Корпус 22 не обязательно должен быть автономным компонентом, но может быть интегрирован с другими компонентами, если это необходимо.
Система отключения 20 принимает вращательный выход 24 двигателя 10, например, представленный выходным валом 26 двигателя 12. В положении, показанном на Фигуре 3, момент привода передается на вход 28 оставшейся части привода 4, например, входного вала трансмиссии 30, посредством соединительного элемента 32. Входной вал 30 может, например, быть соединен с коробкой передач (не показана) для получения желаемой скорости вращения на выходе привода 14.
В положении, показанном на Фигуре 4, так или иначе, двигатель 12 отсоединяется от входного вала 30 при помощи механизма отсоединения 34. Как будет описано далее, механизм отсоединения 34 содержит управляемый вручную рабочий элемент 36, разъединительный элемент 38 и передаточный механизм 40.
Приводная муфта 32 в этом варианте реализации изобретения выполнена в виде манжеты 42, имеющей внутренние шлицы 44. Как можно видеть на Фигуре 3, например, шлицы 44 зацепляют шлицы 46, 48, образованные на внешней поверхности выходного вала 26 и входного вала 30 соответственно, для передачи вращения между выходным валом 26 и входным валом 30. Конечно, в пределах объема настоящего изобретения может быть предоставлен другой вид передачи, например шлицевое соединение с выходным валом 26 и взаимосцепляющимися зубьями, обращенными по оси, выполненными на торце манжеты 42 и входного вала 30 соответственно.
Соединительная манжета 42 выполнена с радиально выступающим фланцем 50, в этом варианте реализации изобретения на одном конце 52 манжеты 42. Первая поверхность 54 фланца 50 принимает один конец пружины 56, которая на своем другом конце вмонтирована в посадочное место 58 в выходном валу 26. Пружина 56 смещает соединительную манжету 42 так, что она входит в полное зацепление с входным валом 30, как показано на Фигуре 3. В этом рабочем состоянии второй торец 60 соединительной манжеты 42 входит в зацепление с плечом 62, предусмотренным на входном валу 30.
Как упоминалось выше, механизм отсоединения 34 содержит управляемый вручную рабочий элемент 36, разъединительный элемент 38 и исполнительный элемент 40.
Управляемый вручную рабочий элемент 36 содержит вал 64, который установлен с возможностью возвратно-поступательного осевого перемещения вдоль оси А, которая в данном варианте реализации изобретения, как правило, перпендикулярна общей вращательной оси В выхода двигателя 24 и входа привода 28. Вал 64 устанавливается в выступе 66 корпуса 22, при этом предусматривается прокладка 68 между выступом 66 и валом 64 для предотвращения протечки текучей среды внутри корпуса 22 в области вокруг вала 64.
Первый торец 70 вала 64 соединен с рукояткой 72, и второй торец 74 вала 64 соединен с исполнительным элементом 40. Центральная область 76 вала 64 может быть помечена, например, цветной пометкой, по причинам, которые будут разъяснены далее.
Рукоятка 72 имеет головку 78 и боковину 80, выступающую от головки 78 и которая входит в первый конец 70 вала 64. В этом варианте реализации изобретения рукоятка 72 установлена на валу 64 таким образом, чтобы иметь возможность вращаться относительно вала 64 вокруг оси вала А, хотя в других вариантах реализации изобретения, рукоятка 72 может вращаться вместе с валом 64. В таких устройствах, так или иначе, соединение между валом 64 и исполнительным элементом 40 должно иметь возможность приводить в соответствие относительное вращательное движение этих двух частей.
Боковина 80 не выступает полностью вокруг всей оси А, но имеет отрезной боковой участок 82, который, когда рукоятка 72 находится в положении, показанном на Фигуре 3, позволяет головке 78 рукоятки 72 входить в зацепление с внешним посадочным местом 84, предусмотренном на выступе корпуса 66. Тем не менее, когда рабочий элемент 36 вытянут или выдвинут из корпуса 22, и рукоятка 72 поворачивается на заданный угол, например 90°, нижний край 86 боковины 80 может размещаться в посадочном месте 84, как показано на Фигуре 4 и 5 таким образом, чтобы удерживать головку 78 и вал 64 в выдвинутом положении.
В этом варианте реализации изобретения исполнительный элемент 40 выполнен в виде рамы 90. Первая торцевая стенка 92 рамы 90 прикреплена или вмонтирована во второй торец 74 вала 64. В других вариантах реализации изобретения рама 90 может быть выполнена как единое целое с валом 64. Вторая торцевая стенка 94 рамы 90 прикреплена к штифту 96, который проходит в, и выполнен с возможностью скольжения в отверстии 98, предусмотренном в корпусе 22. Направляющий штифт 96 и отверстие 98 могут иметь соответствующие взаимозацепляющиеся элементы (например, они могут быть не круглыми в поперечном сечении) с тем, чтобы предотвратить поворот рамы 90 вокруг оси А. Также в некоторых вариантах реализации изобретения, центровочный штифт 96 может быть выполнен как единое целое с рамой 90. Пружина 100 монтируется вокруг вала 64 между первой торцевой стенкой 94 рамы 90 и выступом 66 корпуса 22 так, чтобы смещать раму 90 и вал 64 таким образом, чтобы центровочный штифт 96 более полно размещался в отверстии 98, как показано на Фигуре 3.
Рама 90, как правило, имеет прямоугольную форму и содержит нижнюю часть 102, которая соединена с валом 64, верхнюю часть 104, которая соединена с направляющим штифтом 96, и пару параллельных боковых частей 106, 108, выступающих между нижней частью 102 и верхней частью 104. Как показано на Фигуре 5, соответствующий штифт 110 смонтирован с каждой из боковых частей 106, 108 так, чтобы выступать внутрь боковых частей 106, 108. В этом варианте реализации изобретения штифты 110 расположены непосредственно напротив друг друга. Несмотря на то, что рама 90 показана в форме прямоугольника, в других вариантах реализации изобретения она может иметь простую U - образную форму, например, если предусматривается отличное от центровочного штифта 96 средство, предназначенное для размещения рамы 90.
Рама 90 принимает и обеспечивает возвратно-поступательное линейное перемещение разъединительного элемента 38.
В этом варианте реализации изобретения, разъединительный элемент 38 выполнен в виде блока 120, в частности, в виде обычного, прямоугольного блока 120, имеющего центральное отверстие 122 для приема приводной муфты 32, выступающей между противоположными первой и второй поверхностями 124, 126, противоположными нижней и верхней поверхностями 128, 130 и противоположными боковыми поверхностями 132, 134.
Первая поверхность 124 разъединительного элемента 38 расположена напротив фланца 50 приводной муфты 32. Тем не менее, в полностью сцепленном состоянии, показанном на Фигуре 3, со вторым торцом 60 приводной муфты 32, зацепленной с плечом 62 входа привода, первая поверхность 124 разъединительного элемента 36 находится на расстоянии от фланца 50 так, чтобы избежать трения между этими двумя компонентами.
Кроме того, отверстие 122 разъединительного элемента 38 имеет такие размеры, что существует радиальный зазор между наружной поверхностью блока 120 и внутренней поверхностью отверстия 122. Это должно предотвращать любое трение между двумя компонентами, когда привод присоединен. Приводная муфта 32, таким образом, поддерживается в таком положении исключительно за счет соответствующего выхода и входа валов 26, 30.
Боковые поверхности 132, 134 блока, как правило, параллельны друг другу и проходят со скольжением между боковыми поверхностями 106, 108 рамы 90. Каждая боковая поверхность 132, 134 блока 120 содержит скошенный кулачковый паз 140, как показано на Фигуре 5. Соответствующие пазы 140 принимают выступающие внутрь штыри 110 рамы 90. Следует понимать, что если рама 90 будет перемещаться вдоль оси А, взаимозацепление штифтов 110 в пазах 140 приведет к движению блок 120 вдоль оси В, что в свою очередь приведет к образованию кулачкового соединения.
Далее будет описано функционирование системы отсоединения 20.
В положении, показанном на Фигуре 3, головка 78 рукоятки 72 принимается в посадочном месте 84 выступа корпуса 66. В таком положении, штифты 110 будут расположены в верхней части (в отношении Фигуры 5) кулачковых пазов 140, означая, что разъединительный элемент 38 находится в положении, показанном на Фигуре 3. Пружина 58 смещает соединительную манжету 42 для зацепления с входным валом 30, так что вращение двигателя передается на входной вал 30 с помощью соединительной манжеты 42. Как упоминалось выше, в таком положении не существует никакого соединения между соединительной манжетой 42 и разъединительным элементом 38, тем самым избегая потери на трение в системе.
Когда необходимо отсоединить двигатель 12 от выхода привода 14, пользователь захватывает головку 78 рукоятки 72 и тянет ее из корпуса 22, преодолевая сопротивление пружины 100 так, чтобы выдвинуть вал 64 из корпуса. Рама 90, будучи соединенной с валом 64, перемещается вниз (в отношении фигур). Это приводит к тому, что штифты 110, зацепляющиеся в кулачковых пазах 140, выталкиваются вправо (опять же в отношении фигур), как показано на Фигурах 4 и 5. Это приводит к тому, что блок 120 также перемещается в этом направлении, и, тем самым первая поверхность 124 блока 120 входит в зацепление с фланцем 50 соединительного манжета 42 и, как следствие, перемещает соединительную манжету 42 в том же направлении, преодолевая смещающее сопротивление пружины 56. Это отсоединяет привод. Затем пользователь поворачивает головку 78 рукоятки таким образом, чтобы нижний край 86 боковины 80 рукоятки 72 входил внутрь выступа корпуса 84. Это удерживает рукоятку 72 в выдвинутом положении. Для пользователя будет очевидным, что рукоятка 72 была выдвинута, так как окрашенная центральная секция 76 рукоятки вала 64 теперь не будет видна.
В таком положении, если двигатель 12 может быть непреднамеренно запущен, на выходе привода 14 не появится никакого движения, что позволит избежать возможных травм пользователя. Кроме того, поскольку нет никакой передаточной связи между выходом привода 14 и двигателем 12, передаточный механизм 6 может быть перемещен, не встречая никакого сопротивления со стороны двигателя 12, которое может возникнуть, например, при запуске двигателя или при торможении с неработающим двигателем 12. Это позволит облегчить управление выходом привода 14, передаточным механизмом 6 и створкой 8.
Когда необходимо снова подключить двигатель 12, пользователь просто должен повернуть головку 78 рукоятки 72 в противоположном направлении, чтобы отсоединить нижний край 86 боковины 80 рукоятки 70 от выступа корпуса 84. Рукоятка 72 затем вернется в положение, показанное на Фигуре 3, смещающей силой пружины 100, причем штифты 110 проталкиваются в верхнюю часть (в отношении Фигур) пазов 140 за счет перемещения вверх рамы 90. Это приводит к перемещению блока 120 влево (в отношении Фигур), что позволяет перемещать соединительную манжету 42 влево под действием смещающей силы пружины 56, тем самым снова подключая привод. В случае, если шлицы 44 соединительной манжеты 42, стали ротационно смещены со шлицами 46 входного вала 30 (например, вследствие перемещения либо двигателя 14, либо выхода привода 14 в период отсоединения), соединительная манжета 42 может не войти в зацепление с входным валом 30. Однако, как только двигатель 12 начнет вращаться или выход привода 14 будет находиться под управлением, шлицы будут повторно выровнены и соединительная манжета 42 затем снова войдет в полное зацепление с входным валом 30 под действием смещающей силы пружины 56.
Как обсуждалось выше, система отсоединение привода в соответствии с настоящим изобретением может быть применена в широком спектре применений. В варианте реализации изобретения, показанном на Фигуре 1, система отсоединения расположена внутри полости 18 в крыле самолета. Полость закрывается крышкой 200, которая должна быть открыта, как это схематически показано на Фигуре 6, для получения доступа к приводу 4 и системе отсоединения 20.
Когда техническое обслуживание или другие действия должны быть выполнены на приводе 4, рукоятка 72 системы отсоединения выдвигается из корпуса системы, как описано выше, и удерживается в этом выдвинутом положении. Это схематически показано на Фигуре 7. Как видно из указанной Фигуры, что в этом положении рукоятка 72 будет предотвращать закрытие крышки 200. Это будет служить напоминанием пользователю о том, что система приводов отсоединена, и ее необходимо заново соединить, перед тем как крышка 200 может быть закрыта должным образом.
Таким образом, в описанных вариантах реализации изобретения ряд преимуществ может быть обеспечен указанным изобретением. Отключение двигателя позволяет избежать непреднамеренного функционирования привода, если пуск двигателя происходит случайно во время технического обслуживания привода. Отключение двигателя также уменьшает обратно крутящий момент вследствие момента трогания двигателя или торможения с неработающим двигателем, облегчая выполнение технического обслуживания. Кроме того, положение рабочего элемента в его отведенном положении может применяться для индикации, что привод отсоединен посредством предотвращения закрытия доступа к двери.
Следует понимать, что приведенное выше является описанием только одного неограничивающего варианта реализации изобретения, и что модификации могут быть сделаны в нем в пределах объема изобретения.
Например, наряду с проиллюстрированной системой, применяемой к приводу электродвигателя, оно также может быть применено к другим формам роторных приводов, например, системам гидравлических или пневматических приводов.
Кроме того, наряду с проиллюстрированным кулачковым механизмом, содержащим штифты 110, предусмотренные на рамке 90, и пазы 140, предусмотренные на блоке 120, могут быть использованы и другие механизмы. Например, если позволяет пространство, штифты 110 могут быть предусмотрены на блоке 120, а пазы 140 на раме 90.
Кроме того, в других вариантах реализации изобретения, движение рабочего элемента 34 из корпуса 22 может быть осуществлено путем вращения рабочего элемента 34 вокруг оси А, если предусмотрен подходящий кулачковый механизм между рабочим элементом 34 и корпусом 22.
Реферат
Изобретение относится к системе отсоединения электродвигателя от трансмиссии привода. Система отсоединения силового привода (20) содержит корпус (22) и приводную муфту (32), установленную в корпусе (22). Приводная муфта (32) соединяет приводной электродвигатель с трансмиссией привода. Управляемый вручную механизм отсоединения привода (34) выборочно перемещает приводную муфту (32) из первого положения, в котором электродвигатель и трансмиссия привода соединены, во второе положение, в котором электродвигатель и трансмиссия привода разъединены. Механизм отсоединения привода (34) содержит рабочий элемент (36), который вручную выдвигается из корпуса (22) для перемещения приводной муфты (32) из первого положения во второе положение. Достигается упрощение конструкции и повышение безопасности обслуживания системы. 2 н. и 12 з.п. ф-лы, 7 ил.
Комментарии