Механизмы регулировки мощности для хирургических инструментов и аккумуляторов - RU2573584C2
Код документа: RU2573584C2
Чертежи


























































Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Все большее число хирургических инструментов получают питание от одного или более аккумуляторных батарейных элементов. Такие инструменты включают множество электроинструментов и могут использоваться в различных областях хирургии. Хирургические инструменты с батарейным питанием могут содержать приводные приспособления, такие как, например, фрезы, зажимы и/или сшивающие аппараты. Хирургические инструменты с батарейным питанием также могут содержать неприводные инструменты, такие как, например, радиоволновые фрезы/коагуляторы, ультразвуковые фрезы/коагуляторы и/или лазерные фрезы/коагуляторы. Инструменты с батарейным питанием сейчас также используются в различных областях хирургии, например, в эндоскопической хирургии, лапароскопической хирургии и открытой хирургии.
Хирургические инструменты с батарейным питанием часто используют первичные элементы, которые являются предварительно заряженными и часто предназначены для одного разряда (например, для одного использования). Использование одноразрядных аккумуляторных элементов позволяет избежать трудностей, связанных с их повторной стерилизацией и перезарядкой. Однако использование первичных элементов в настоящее время связано с проблемами, относящимися к их перевозке, хранению и утилизации. Например, заряженный аккумуляторный элемент может стать опасным отходом, если он не был надлежащим образом разряжен после однократного использования, поскольку в нем могло сохраниться значительное количество оставшегося заряда. Для уменьшения этого риска многие органы власти создали правила, регулирующие условия, в которых могут перевозиться и утилизироваться аккумуляторные элементы. Аккумуляторные элементы и батареи с большим количеством накопленной энергии должны перевозиться, храниться и утилизироваться с соблюдением более жестких и зачастую более затратных мер безопасности.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Различные варианты осуществления настоящего изобретения могут быть отнесены к хирургическому инструменту, который имеет концевой зажим и рукоятку, которая непосредственно соединена с концевым зажимом. Рукоятка может иметь пусковое устройство, приводящее в действие концевой зажим, и установочный модуль для батареи, который имеет выступающую часть. Хирургический инструмент может иметь батарейный блок, присоединяемый к установочному модулю для батарей, где батарейный блок находится в электрическом контакте с по меньшей мере одной рукояткой или концевым зажимом при присоединении к установочному блоку для батарей. Батарейный блок может иметь корпус, внутри которого расположены первый анод и первый катод. Батарейный блок также может иметь переносной разъем для разряда, где, при присоединении батарейного блока к установочному модулю для батарей, выступающая часть контактирует с разъемом для разряда, и разъем для разряда перемещается относительно корпуса для электрического соединения первого анода батарейного блока с первым катодом батареи.
К тому же, различные варианты осуществления настоящего изобретения могут относиться к хирургическому инструменту, имеющему аккумуляторное отделение. Хирургический инструмент может иметь выступающую часть, которая находится в непосредственной близости к аккумуляторному отделению батарейного блока. Батарейный блок может иметь корпус и множество расположенных в нем аккумуляторных элементов, где по меньшей мере часть этого множества аккумуляторных элементов электрически не соединена друг с другом. Батарейный блок может иметь элементный коммутатор, который имеет открытое положение и закрытое положение, где в закрытом положении элементный коммутатор электрически соединяет анод батарейного блока с катодом батарейного блока. Элементный коммутатор может быть механически перемещен в закрытое положение, когда элементный коммутатор удерживается в открытом положении при помощи непроводящей части корпуса. Элементный коммутатор может быть перемещен в закрытое положение при помощи выступающей части при присоединении батарейного блока к аккумуляторному отделению хирургического инструмента.
Кроме того, различные варианты осуществления могут относиться к хирургической системе, содержащей хирургическое устройство с установочным модулем для батарей. Хирургическая система может также иметь батарейный блок, где батарейный блок имеет первое и второе соединение аккумуляторных элементов и переносной разъем для разряда аккумуляторной батареи, находящийся в непосредственной близости к первому и второму соединению аккумуляторных элементов. Переносной разъем для разряда аккумуляторной батареи может иметь первую и вторую контактную группу; где, в первом положении, первая и вторая контактные группы электрически не соединены с первым и вторым соединением аккумуляторных элементов. Во втором положении первая контактная группа может быть электрически соединена с первым соединением аккумуляторных элементов, и вторая контактная группа электрически соединяется со вторым соединением аккумуляторных элементов. Переносной разъем для разряда аккумуляторной батареи может перемещаться из первого положения во второе положение при присоединении батарейного блока к установочному модулю для батарей.
ЧЕРТЕЖИ
Особенности различных вариантов осуществления настоящего изобретения подробно изложены в прилагаемой формуле изобретения. Однако различные варианты осуществления настоящего изобретения, относящиеся к устройству и способам оперирования, а также их преимуществам, лучше всего будут понятны со ссылкой на следующее описание, приведенное в соответствии со следующими прилагаемыми чертежами:
Фиг. 1 и 2 являются видами в перспективе одного варианта осуществления хирургического инструмента для сшивания и разрезания.
Фиг. 3 является изображением в разобранном виде одного варианта осуществления концевого зажима хирургического аппарата для сшивания и разрезания с Фиг. 1 и 2.
Фиг. 4 и 5 являются изображениями в разобранном виде одного варианта осуществления концевого зажима и вала хирургического инструмента для сшивания и разрезания с Фиг. 1 и 2.
Фиг. 6 является видом сбоку одного варианта осуществления концевого зажима хирургического инструмента для сшивания и разрезания с Фиг. 1 и 2.
Фиг. 7 является изображением в разобранном виде одного варианта осуществления приводной фрезы для эндоскопической хирургии.
Фиг. 8 и 9 являются частичными видами в перспективе одного варианта осуществления рукоятки фрезы для эндоскопической хирургии с Фиг. 7.
Фиг. 10 является видом сбоку одного варианта осуществления рукоятки фрезы для эндоскопической хирургии с Фиг. 7.
Фиг. 11 является схематическим изображением одного варианта осуществления электрической цепи хирургического инструмента для сшивания и разрезания.
Фиг. 12 является видом сбоку рукоятки одного варианта осуществления приводной фрезы для эндоскопической хирургии с усилителем.
Фиг. 13 является видом сбоку рукоятки другого варианта осуществления приводной фрезы для эндоскопической хирургии с усилителем.
Фиг. 14 и 15 изображают один вариант осуществления спускового крючка блокировочного механизма.
Фиг. 16 изображает другой вариант осуществления спускового крючка блокировочного механизма
Фиг. 17-22 изображают другой вариант осуществления спускового крючка блокировочного механизма.
Фиг. 23A-23B изображают один вариант осуществления карданного сочленения (“универсальный шарнир”), которое может использоваться в точке сочленения хирургического инструмента.
Фиг. 24A-24B изображают один вариант осуществления торсионного кабеля, который может использоваться в точке сочленения хирургического инструмента.
Фиг. 25-31 изображают другой вариант осуществления приводного двухтактного хирургического инструмента для сшивания и разрезания и усилением.
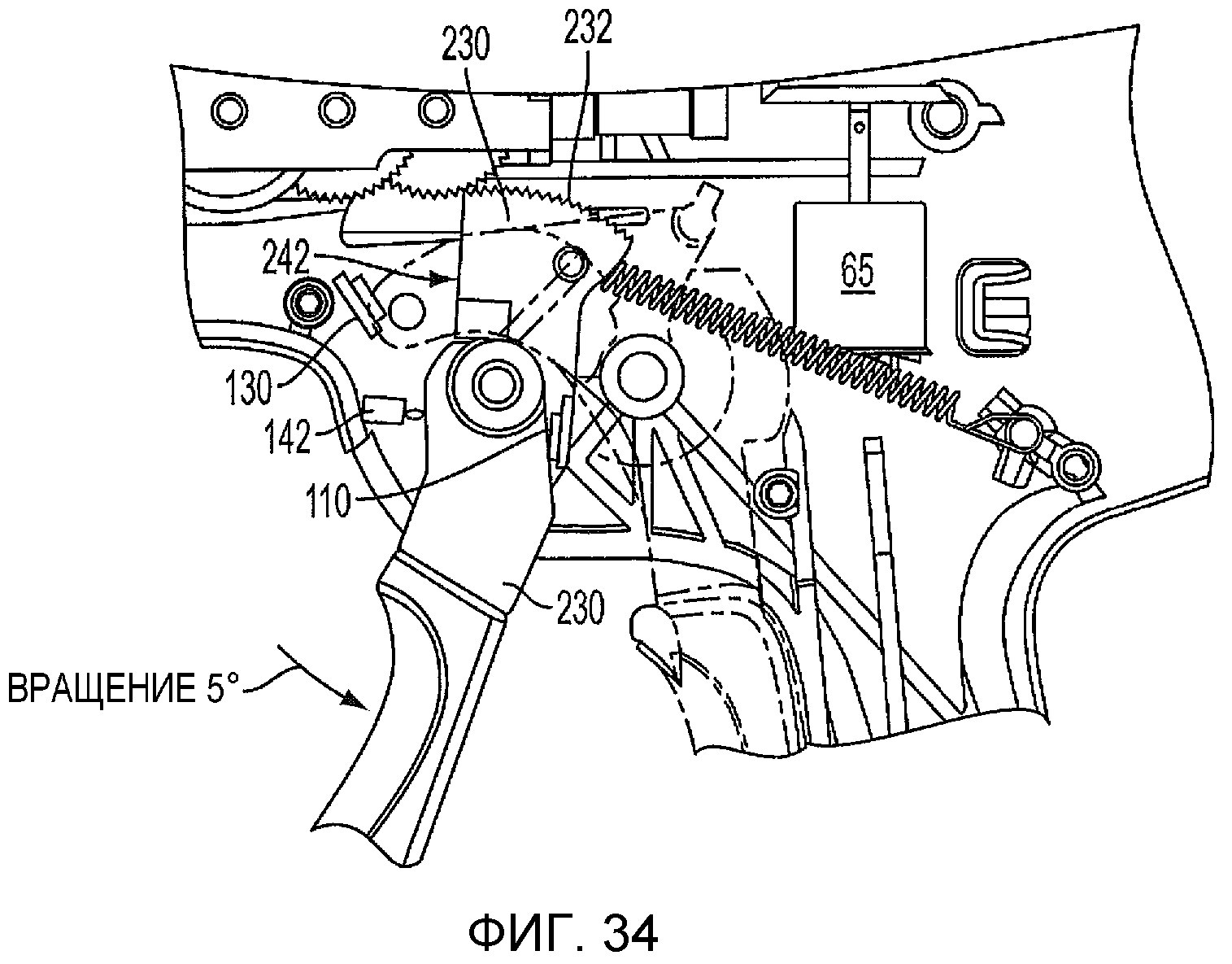
Фиг. 32-36 изображают один вариант осуществления двухтактного приводного хирургического инструмента для сшивания и разрезания с усилением.
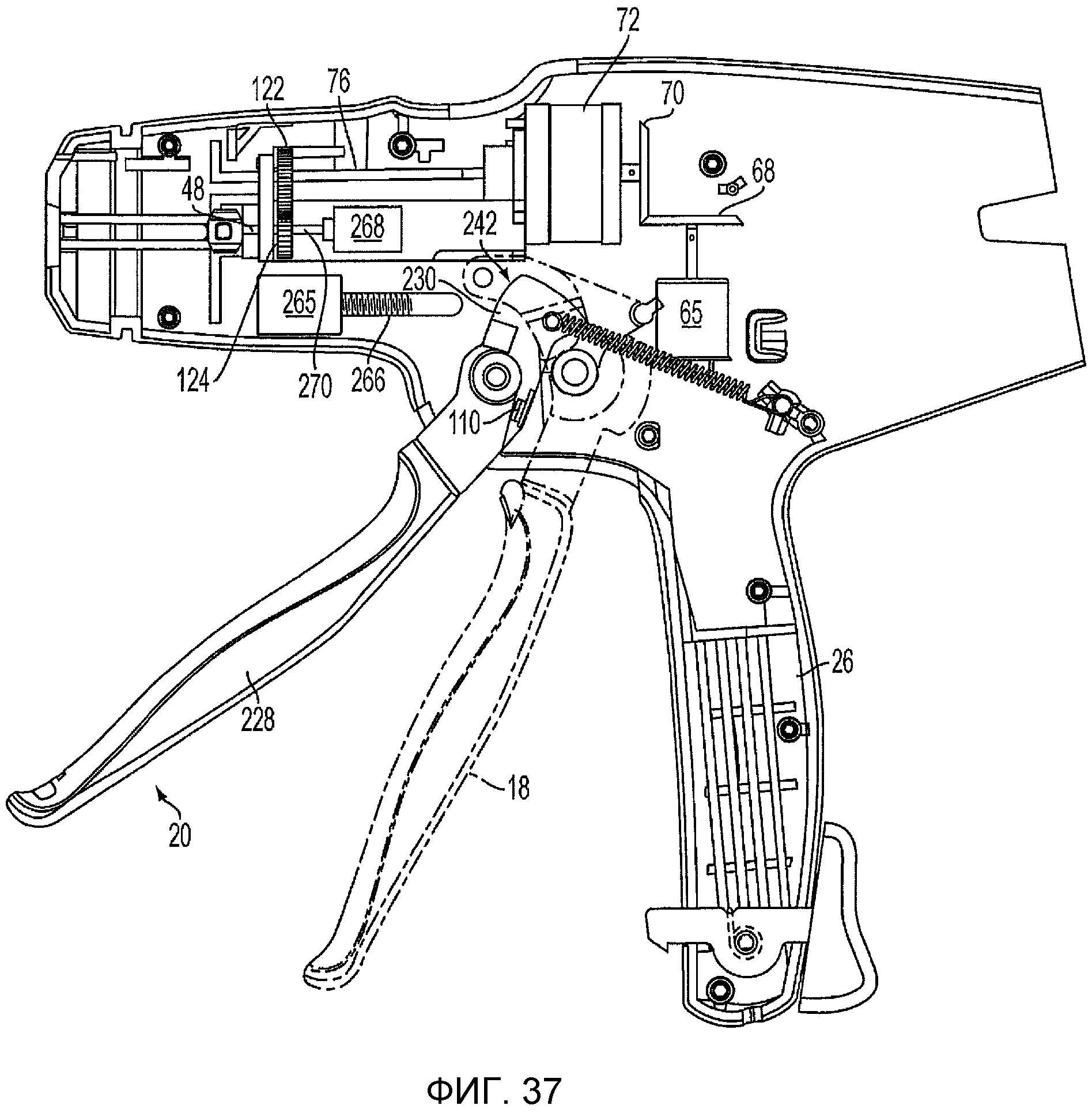
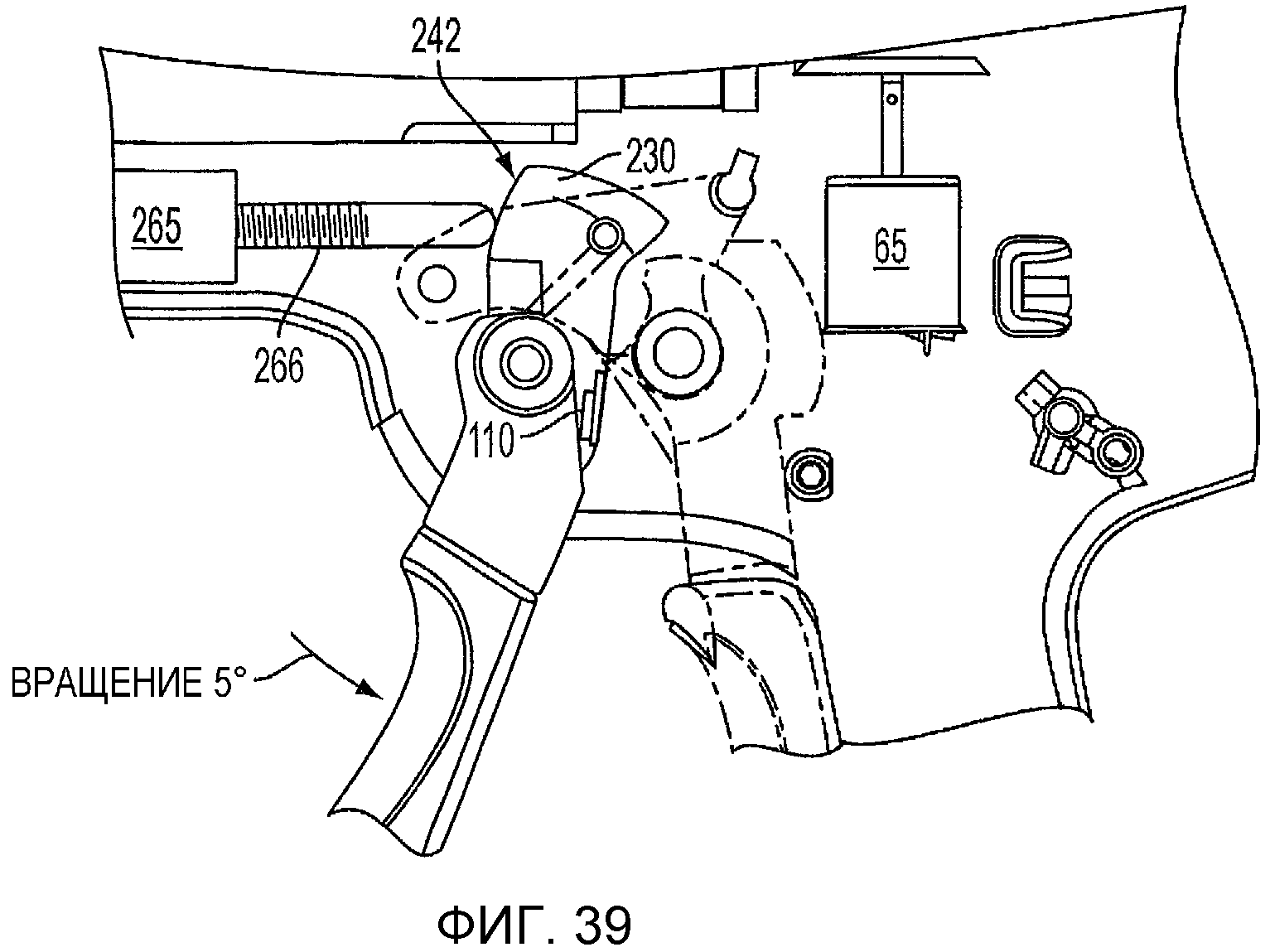
Фиг. 37-40 изображают один вариант осуществления приводного хирургического инструмента для сшивания и разрезания с системой тактильной позиционной обратной связи.
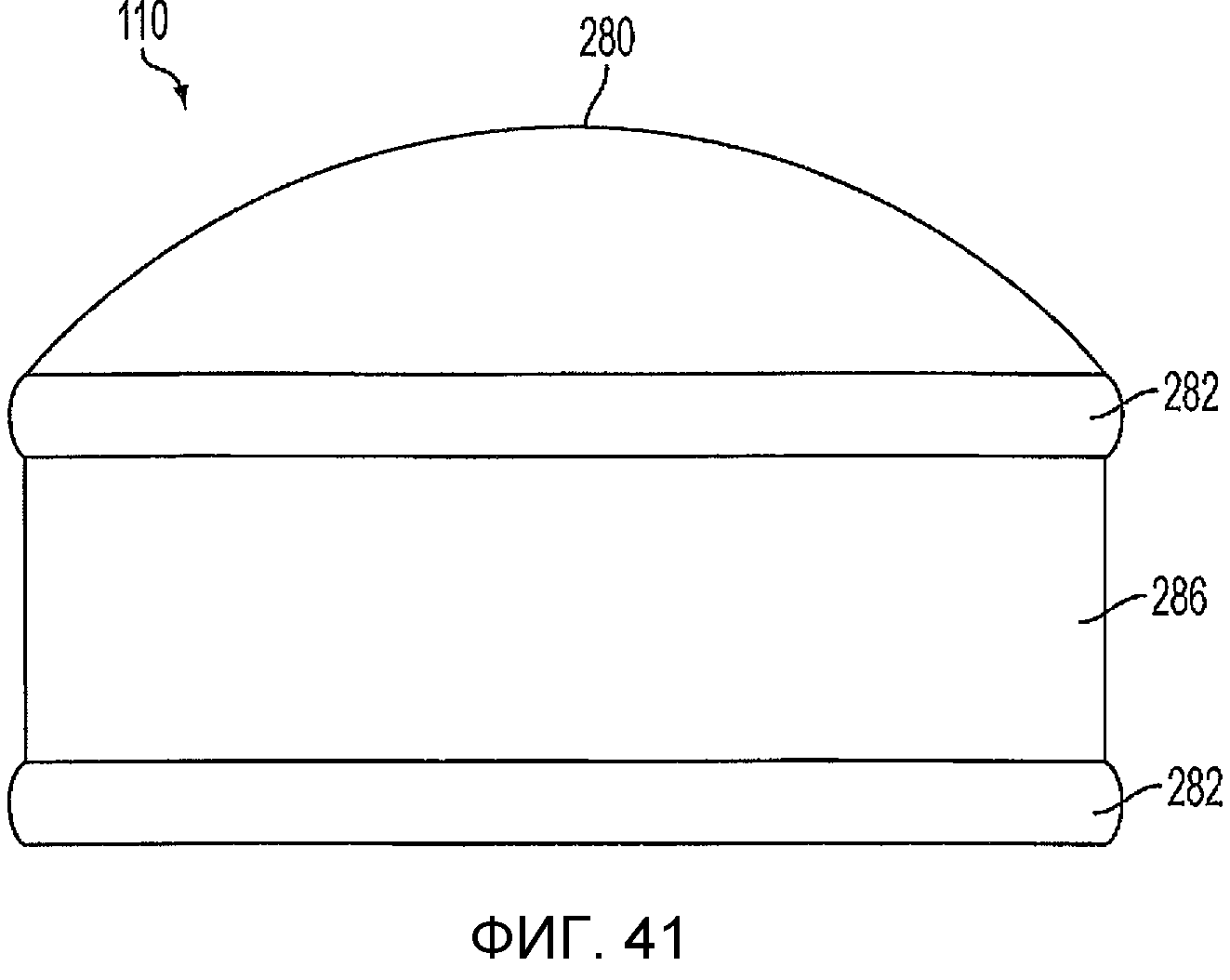
Фиг. 41 и 42 изображают два состояния одного варианта осуществления регулируемого датчика, который может использоваться в качестве датчика запуска мотора.
Фиг. 43 является частичным поперечным разрезом хирургического инструмента с различными компонентами, которые были удалены для ясности.
Фиг. 44A и 44B изображают запорную защелку во время различных режимов работы
Фиг. 45A, 45B и 45C изображают запорную защелку и зубчатую передачу во время различных режимов работы.
Фиг. 46 изображает один вариант осуществления хирургического инструмента.
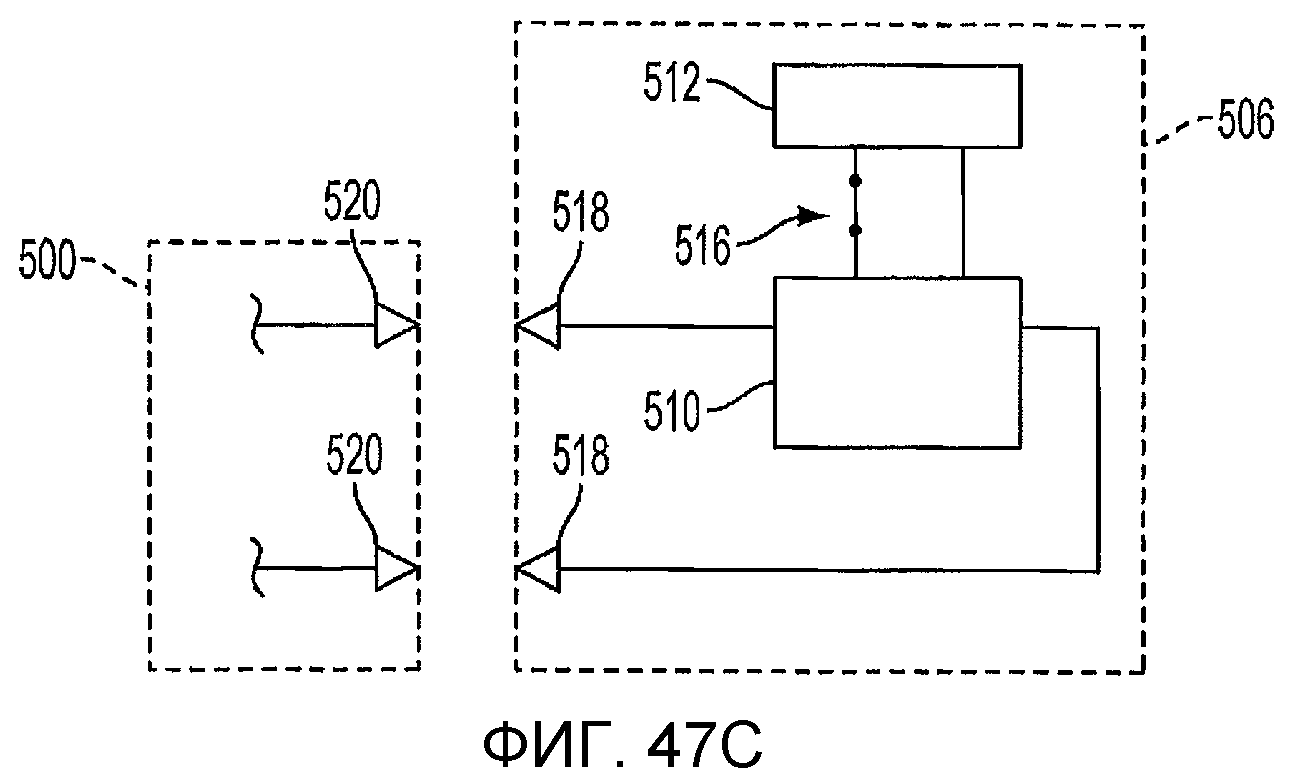
Фиг. 47A, 47B и 47C схематически изображают монтаж и демонтаж батарейного блока к инструменту.
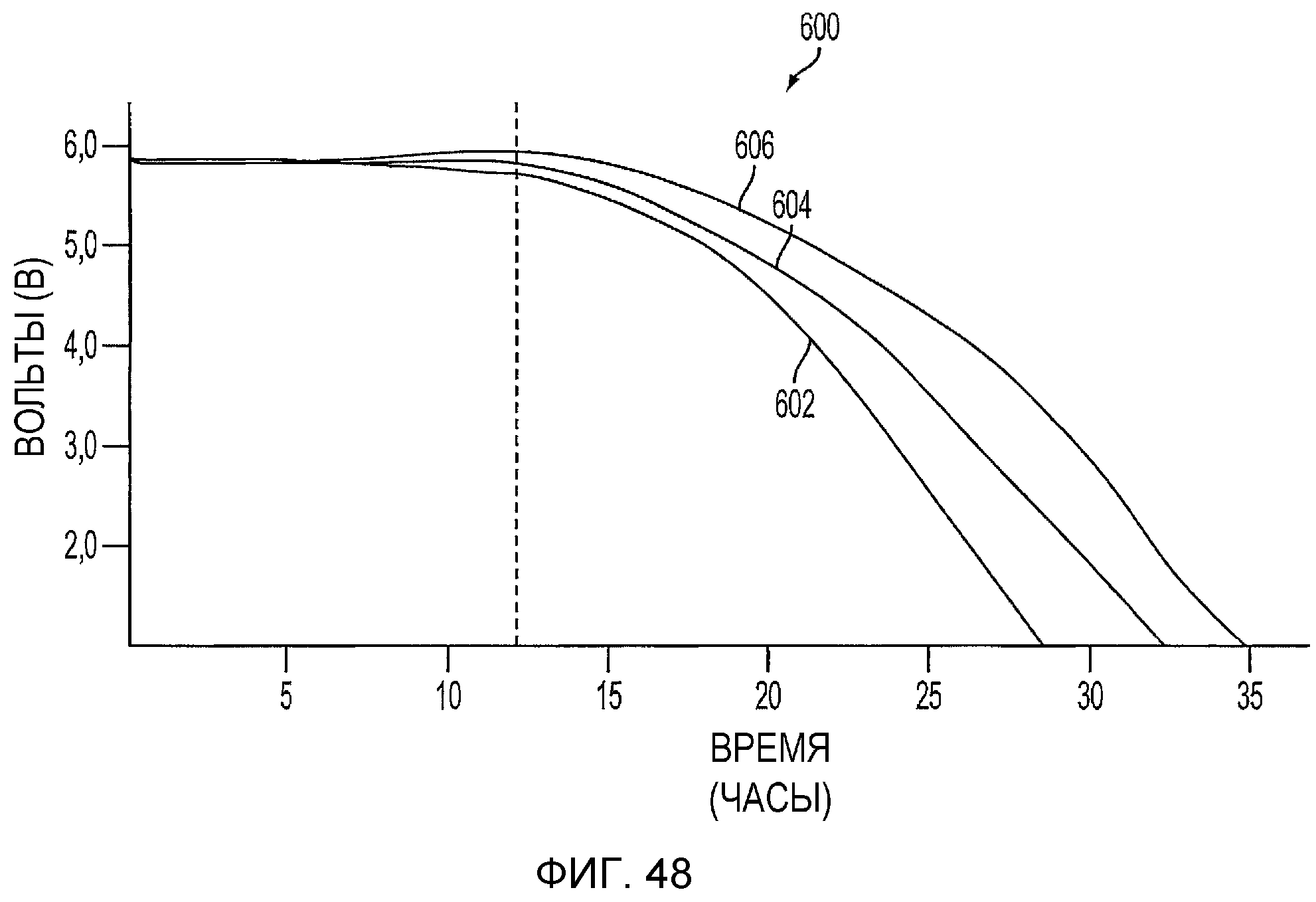
Фиг. 48 является графиком уровня напряжения в батарейном блоке в течение времени, которое было измерено с момента его присоединения к инструменту в соответствии с одним неограничивающим вариантом осуществления настоящего изобретения.
Фиг. 49A является одним вариантом осуществления упрощенной схемы соединения батарейного блока, который содержит разъем для разряда.
Фиг. 49B является другим вариантом осуществления упрощенной схемы соединения батарейного блока, который содержит разъем для разряда
Фиг. 50 является одним вариантом осуществления упрощенной схемы соединения батарейного блока, содержащего первый и второй разъем для разряда.
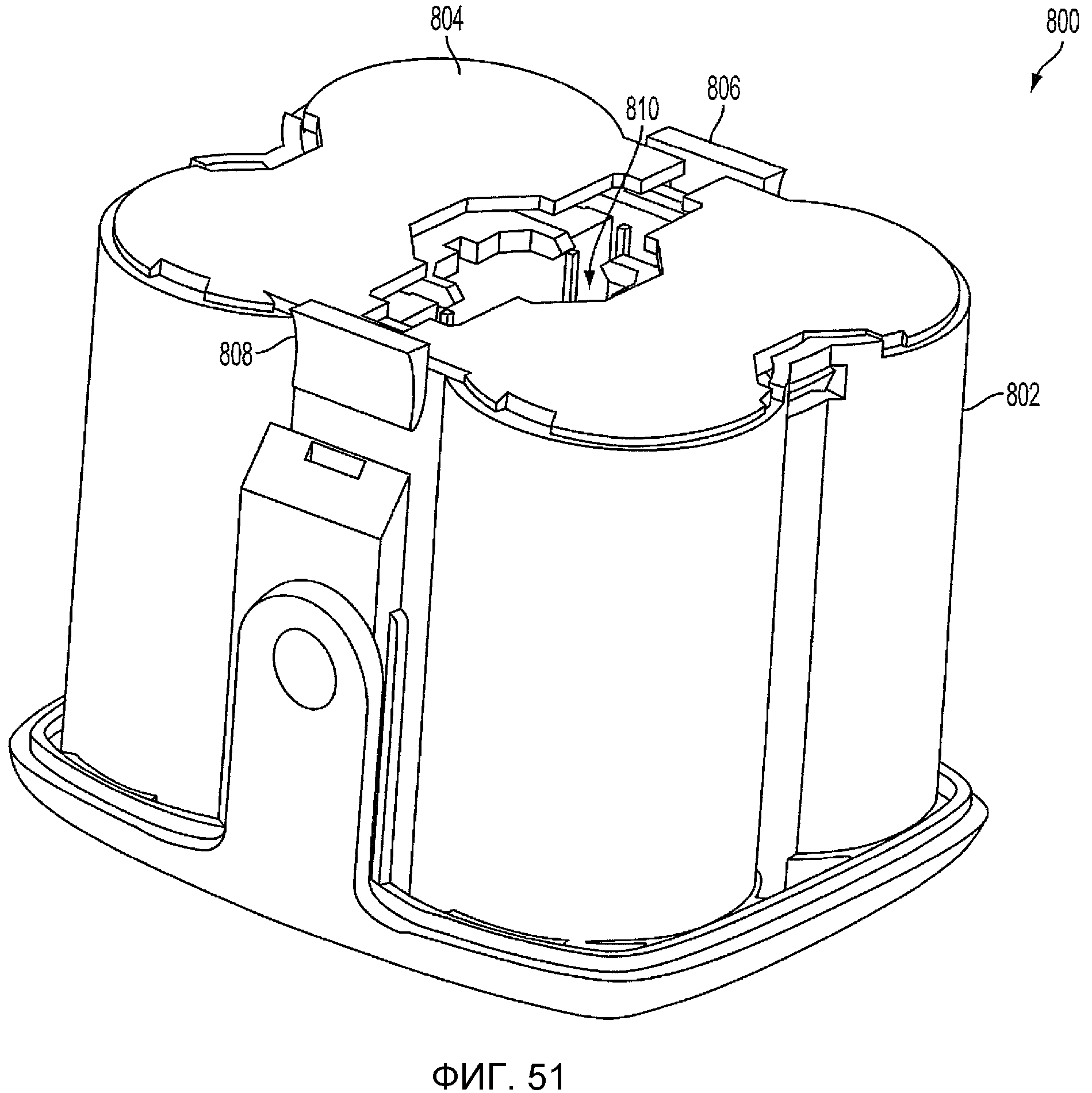
Фиг. 51-53 являются видами в перспективе одного варианта осуществления батарейного блока.
Фиг. 54A и 54B изображают поперечное сечение одного варианта осуществления батарейного блока, содержащего переносной разъем для разряда.
Фиг. 55 является видом в перспективе одного варианта осуществления разъема для разряда.
Фиг. 56 изображает батарейный блок, помещенный в установочный модуль для батарей, с различными компонентами, которые были опущены для ясности.
Фиг. 57A и 57B изображают батарейный блок с различными компонентами, которые были опущены для ясности.
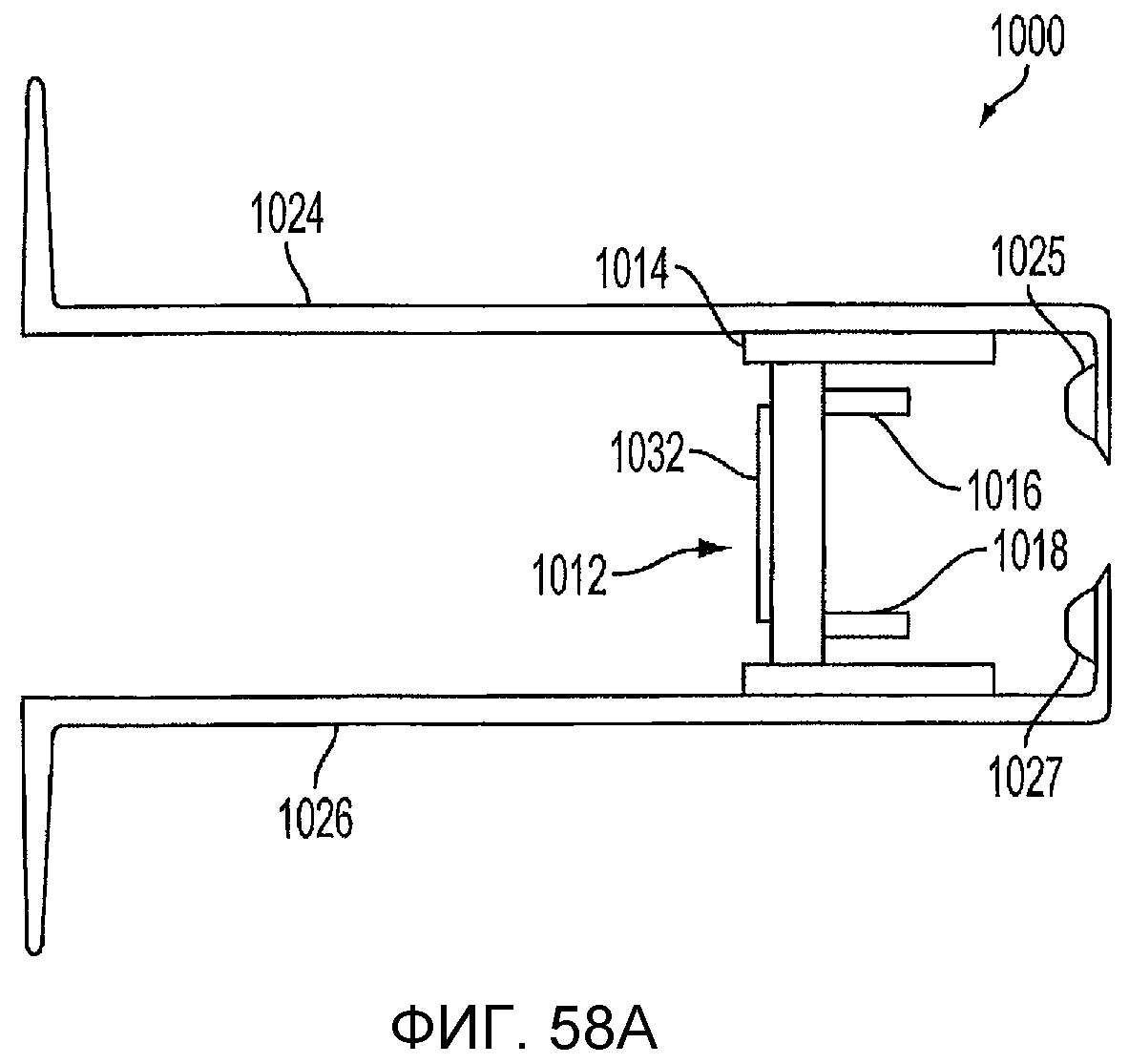
Фиг. 58A и 58B изображают батарейный блок с различными компонентами, которые были опущены для ясности.
Фиг. 59 является видом в перспективе одного варианта осуществления батарейного блока с одним аккумуляторным элементом.
Фиг. 60A и 60B изображают виды изнутри батарейного блока с Фиг. 59 во время различных режимов работы с различными компонентами, которые были опущены для ясности.
ОПИСАНИЕ
Различные варианты осуществления настоящего изобретения относятся к хирургическим инструментам с батарейным питанием и батареям, включая особенности их перевозки, хранения и утилизации. Например, в соответствии с одним вариантом осуществления настоящего изобретения, батарейный блок должен содержать по меньшей мере один аккумуляторный элемент внутри корпуса, который ограничивает полость. Батарейный блок может иметь переносной разъем для разряда, расположенный в непосредственной близости к полости. Разъем для разряда может перемещаться между замкнутым и разомкнутым положением. Хирургический инструмент для использования с батарейным блоком может содержать установочный модуль для батарей, отделение для батарей или другую часть для размещения батарей, которая содержит выступающую часть, которая вставляется в полость батарейного блока. Перед присоединением к хирургическому инструменту разъем для разряда должен находиться в разомкнутом положении. Во время присоединения батарейного блока к хирургическому инструменту выступающая часть должна контактировать с разъемом для разряда для перемещения разъема для разряда относительно крепления. При перемещении в закрытое положение разъем для разряда может создавать цепь разряда, например, между анодом батарейного блока, катодом батарейного блока и резистивным элементом. С момента присоединения цепь разряда отводит энергию из батарейного блока. В некоторых вариантах осуществления батарейный блок может быть почти разряжен или полностью разряжен в течение, например, приблизительно 24 часов. В целом, использование разъема для разряда помогает обеспечивать уровень напряжения в батарейном блоке, который был бы равен или был ниже приемлемого уровня для утилизации.
Перед описанием вариантов осуществления аккумуляторных элементов, батарей, батарейных блоков и связанных с ними хирургических инструментов предоставляется подробное описание примерных вариантов осуществления хирургических инструментов с батарейным питанием. Хотя описываемые в настоящем документе хирургические инструменты содержат приводные приспособления для разрезания и сшивания, будет понятно, что описанные в настоящем документе конструкции аккумуляторной батареи могут использоваться с любым видом хирургических электроинструментов, таких как, например, фрезы, зажимы, аппараты для сшивания, радиочастотные фрезы/коагуляторы, ультразвуковые фрезы/коагуляторы и лазерные фрезы/коагуляторы.
Фиг. 1 и 2 являются видами в перспективе одного варианта осуществления хирургического режущего и сшивающего инструмента 10. Представленный на иллюстрациях вариант осуществления является эндоскопическим инструментом и в целом отражает варианты осуществления инструмента 10, описанные в настоящем документе, который представляет собой режущие и сшивающие инструменты. Следует отметить, что, в соответствии с другими вариантами осуществления, инструмент может использоваться не в качестве эндоскопического режущего и сшивающего инструмента, например, в качестве инструмента для проведения лапароскопических или открытых операций.
Хирургический инструмент 10, изображенный на Фиг. 1 и 2, содержит рукоятку 6, ствол 8 и шарнирный концевой зажим 12, соединенный со стволом 8 шарнирным сочленением 14. Рядом с рукояткой 6 может располагаться устройство управления шарнирным сочленением 16, обеспечивающее вращение концевого зажима 12 на шарнирном сочленении 14. В изображаемом варианте осуществления настоящего изобретения концевой зажим 12 сконфигурирован таким образом, чтобы он мог использоваться в качестве фрезы для эндоскопической хирургии для зажимания, рассечения и сшивания тканей, хотя, в других вариантах осуществления могут использоваться различные виды концевых зажимов, таких как концевые зажимы для других видов хирургических устройств, например, таких как зажимы, фрезы, аппараты для сшивания, клипсонакладыватели, устройства для доступа, устройства для лекарственной/генной терапии, ультразвуковые, радиочастотные или лазерные устройства.
Рукоятка 6 инструмента 10 может иметь закрывающее спусковое устройство 18 и пусковое устройство 20, приводящее в действие концевой зажим 12. Необходимо понимать, что инструменты с концевыми зажимами, предназначенные для выполнения различных хирургических манипуляций, могут иметь разное количество и типы пусковых устройств или иных соответствующих средств управления концевым зажимом 12. Концевой зажим 12 показан отдельно от рукоятки 6, рядом с предпочтительно удлиненным стволом 8. В одном варианте осуществления настоящего изобретения хирург или оператор инструмента 10 должен повернуть концевой зажим 12 относительно ствола 8 при помощи шарнирного сочленения 16, что более подробно описывается в рассматриваемой заявке на патент США № 11/329020, поданной 10 января 2006 года, под названием “Surgical Instrument Having An Articulating End Effector” и авторством Geoffrey C. Hueil et al., который включен в полном объеме в настоящий документ в виде ссылки.
В приведенном примере концевой зажим 12, помимо прочего, имеет канал для скобок 22 и шарнирно перемещаемый зажимной элемент, например, упорную пластину 24, между которыми поддерживается расстояние, обеспечивающее эффективное сшивание скобками, а также рассечение ткани, захваченной концевым зажимом 12. Рукоятка 6 содержит пистолетную рукоятку 26, к которой хирург поворачивает на шарнире закрывающее пусковое устройство 18 для зажимания или закрывания упорной пластины 24 желобом для шовных скобок 22 концевого зажима 12, тем самым располагая зажимаемую ткань между упорной пластиной 24 и желобом 22. Пусковое устройство 20 расположено снаружи относительно закрывающего пускового устройства 18. Как только закрывающее пусковое устройство 18 фиксируется в закрытом положении, как дополнительно описано ниже, пусковое устройство 20 может без усилий прижаться к пистолетной рукоятке 26, поэтому оператор может осуществлять такую манипуляцию одной рукой. Затем оператор может прижать пусковое устройство 20 к пистолетной рукоятке 26, осуществляя сшивание и рассечение ткани, зажатой в концевом зажиме 12. В других вариантах осуществления настоящего изобретения могут использоваться различные виды зажимных элементов, помимо упорной пластины 24, такие как, например, противоположный захват.
Необходимо принять во внимание, что термины «проксимальный» и «дистальный» используются в настоящем документе по отношению к хирургу, удерживающему браншу 6 инструмента 10. Так, концевой зажим 12 расположен дистально по отношению к рукоятке 6, расположенной более проксимально. Необходимо также принять во внимание, что для удобства и ясности такие пространственные термины как «вертикальный» и «горизонтальный» используются в настоящем документе по отношению к фигурам. Однако использование хирургических инструментов предполагает множество ориентаций и положений, поэтому указанные термины не являются абсолютными и не ограничивают настоящее изобретение.
При пользовании инструментом сначала можно нажимать закрывающее пусковое устройство 18. Когда хирурга устраивает положение концевого зажима 12, он может оттянуть закрывающий спусковой крючок 18 в фиксированное положение полного закрытия, вплотную к пистолетной рукоятке 26. После этого может быть нажат пусковой крючок 20. Пусковое устройство 20 возвращается в открытое положение (как показано на Фиг. 1 и 2), когда хирург устраняет давление, как более подробно описано ниже. Спусковая кнопка 160 на рукоятке 6, и, в данном примере, на пистолетной рукоятке 26 рукоятки 6, при нажатии может высвобождать заблокированный пусковой крючок 18.
Фиг. 3 является изображением в разобранном виде одного варианта осуществления концевого зажима 12. Как показано на фигуре, концевой зажим 12, помимо ранее указанного желоба 22 и упорной пластины 24, может содержать режущий инструмент 32, салазки 33, съемный картридж со скобами 34, установленный в желобе 22, и винтовой вал 36. Режущий инструмент 32 может, например, являться скальпелем. Упорная пластина 24 может открываться и закрываться на шарнире 25, соединенном с проксимальным концом желоба 22. Упорная пластина 24 также на проксимальном конце может иметь петлю 27, вставленную в часть механизма закрытия (описан ниже) для открывания и закрывания упорной пластины 24. Когда закрывающий спусковой крючок 18 приводится в действие, то есть отводится пользователем инструмента 10, упорная пластина 24 может поворачиваться шарниром 25 в фиксированное, или закрытое положение. Если фиксация концевого зажима 12 является удовлетворительной, оператор может привести в действие пусковое устройство 20, при этом, как более подробно описано ниже, скальпель 32 и салазки 33 перемещаются вдоль желоба 22, рассекая ткани, зафиксированные концевым зажимом 12. В результате движения салазок 33 вдоль желоба 22 скобки из кассеты 34 прошивают рассеченные ткани, упираясь в прижатую упорную пластину 24, которая формирует их, фиксируя ткани. В патенте США № 6978921 под названием “Surgical Stapling Instrument Incorporating An E-Beam Firing Mechanism,” который включен в настоящий документ в виде ссылки, предоставляется более подробная информация о таких двухтактных режущих и сшивающих инструментах. В соответствии с различными вариантами осуществления настоящего изобретения салазки 33 могут быть составной частью кассеты 34, поэтому когда скальпель 32 втягивается после проведения разреза, салазки 33 не втягиваются.
Необходимо отметить, что, несмотря на то что в описанных в настоящем документе вариантах осуществления инструмента 10 используется концевой зажим 12, сшивающий скобками рассеченную ткань, в других вариантах осуществления могут использоваться другие способы стягивания или сшивания рассеченной ткани. Например, могут также применяться концевые зажимы, использующие для стягивания рассеченной ткани энергию радиоволн или клеящие вещества. В патенте США № 5810811 под названием “Electrosurgical Hemostatic Device”, который включен в настоящий документ в виде ссылки, описывается режущий инструмент, который использует радиочастоты для скрепления рассеченных тканей. В заявке на патент США № 11/267811 под названием “Surgical Stapling Instruments Structured For Delivery Of Medical Agents” и заявке на патент США № 11/267383 под названием “Surgical Stapling Instruments Structured For Pump-Assisted Delivery Of Medical Agents”, которые также включены в настоящий документ в виде ссылки, описываются режущие инструменты, которые используют клейкие вещества для скрепления рассеченных тканей. Таким образом, хотя описание настоящего документа относится к операциям рассечения/сшивания и, как показано ниже, следует понимать, что они являются примерными вариантами осуществления настоящего изобретения и поэтому не могут его ограничивать. Могут также использоваться другие техники сшивания тканей.
Фиг. 4 и 5 являются изображениями в разобранном виде, и Фиг. 6 является видом сбоку одного варианта осуществления концевого зажима 12 и ствола 8. Как показано в проиллюстрированном варианте осуществления, вал 8 может содержать проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, связанные шарнирным звеном 44. Дистальная закрывающая трубка 42 имеет отверстие 45, в которое вставляют язычок 27 на упорной пластине 24, чтобы открывать и закрывать упорную пластину 24, как более подробно описано ниже. Непосредственно внутри закрывающих трубок 40 и 42 может быть расположена сердцевинная трубка 46. Непосредственно внутри сердцевинной трубки 46 может быть расположен основной вращательный (или проксимальный) приводной вал 48, который соединяется со вспомогательным (или дистальным) приводным валом 50 с помощью комплекта конических зубчатых колес 52. Вспомогательный приводной вал 50 соединен с приводным механизмом 54, который приводит в действие проксимальный приводной механизм 56 винтового вала 36. Когда главный приводной вал 48 приводится во вращение приведенным в действие пусковым устройством 20 (как более подробно описывается ниже), коническая шестерня в сборе 52a-c приводит во вращение вспомогательный приводной вал 50, который, в свою очередь, в связи со сцеплением с приводными механизмами 54, 56, вызывает вращение винтового вала 36, который вызывает перемещение скальпеля/салазок ведущей детали 32 вдоль желоба 22 для рассечения любой ткани, которая фиксируется концевым зажимом 12. Вертикальное коническое зубчатое колесо 52 b может находиться и поворачиваться в отверстии 57 на дистальном конце проксимальной сердцевинной трубки 46. В дистальную сердцевинную трубку 58 могут быть вставлены вспомогательный приводной вал 50 и приводные механизмы 54 и 56. В совокупности главный приводной вал 48, вспомогательный приводной вал 50 и шарнирный блок (например, блок конических зубчатых колес 52a-c) в настоящем документе иногда называются "блоком главного приводного вала".
Направляющая 38 закреплена на винтовом вале 36. Направляющая 36 также соединена со скальпелем 32. Когда винтовой вал 36 вращается вперед, направляющая 38 перемещает винтовой вал 36 дистально, приводит в движение режущий инструмент 32, при этом салазки 33 проводят операцию рассечения/сшивания. Салазки 33 могут быть выполнены, например, из пластика и могут иметь наклонную дистальную поверхность. Во время перемещения салазок 33 по желобу 22 наклонная передняя поверхность может протолкнуть или привести в движение шовные скобки в кассете для шовных скобок 34 в зажатых тканях напротив упорной пластины 24. Упорная пластина 24 сгибает скобы, скрепляя таким образом рассеченные ткани. Когда скальпель 32 втянут, скальпель 32 и салазки 33 могут разъединяться, при этом салазки 33 остаются на дистальном конце желоба 22.
Из-за отсутствия обратной связи с пользователем во время операции рассечения/сшивания среди врачей есть общее неприятие приводных хирургических инструментов, которые при операциях рассечения/сшивания приводятся в действие простым нажатием кнопки. В противоположность этому, различные варианты осуществления предусматривают наличие приводной фрезы для эндоскопической хирургии с обратной связью с пользователем для определения размещения, силы и/или положения концевого зажима режущего инструмента.
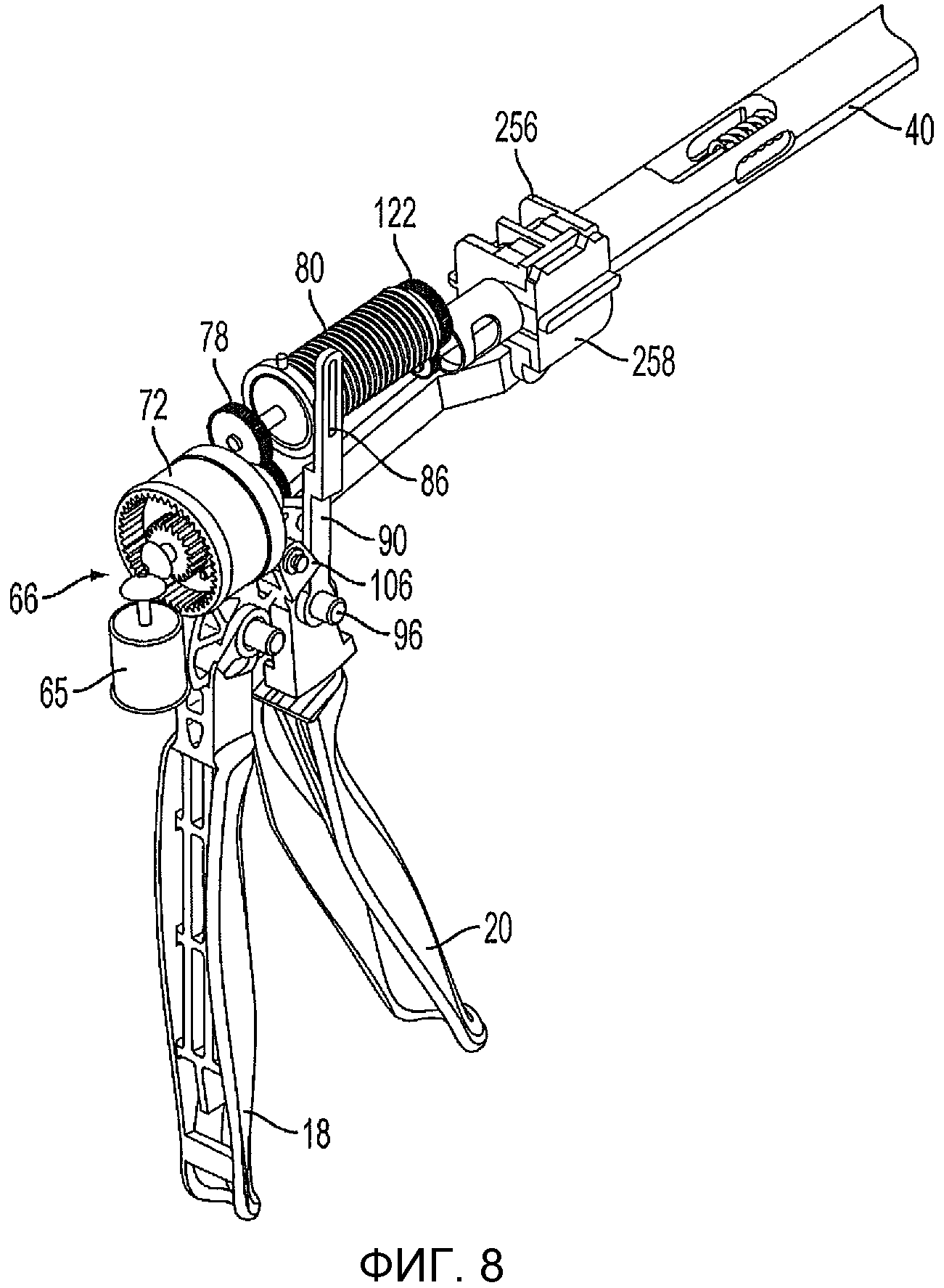
На Фиг. 7-10 изображается один вариант осуществления приводной фрезы для эндоскопической хирургии, и, в частности, ее рукоятки 6, которая обеспечивает обратную связь с пользователем относительно размещения и приложения силы к концевому зажиму режущего инструмента. Кроме того, данный вариант осуществления может использовать силу, приложенную пользователем во время притягивания пускового устройства 20, для увеличения производительности устройства (так называемый «усиленный режим»). Как показано в проиллюстрированном варианте осуществления, рукоятка 6 содержит детали внешней нижней стороны 59, 60 и детали внешней верхней стороны 61, 62, которые вплотную прилегают друг к другу, формируя внешнюю часть рукоятки 6. Батарея 64, такая как литий-ионная батарея, может находиться в установочном модуле для батарей 63. В некоторых вариантах осуществления настоящего изобретения батарея 64 находится в пистолетной рукоятке 26, которая является частью рукоятки 6. Несмотря на то, что батарея 64 изображена в виде нескольких соединенных между собой аккумуляторных элементов, следует отметить, что в некоторых вариантах осуществления настоящего изобретения батарея 64 может содержать один аккумуляторный элемент. Батарея 64 может обеспечивать питание двигателя 65, расположенного на верхней части пистолетной рукоятки 26 рукоятки 6. Согласно различным вариантам осуществления, двигатель 65 может быть приводным щеточным двигателем постоянного тока с максимальной скоростью вращения приблизительно 5000 оборотов в минуту. Двигатель 65 может приводить в движение блок 90° конических зубчатых колес 66, содержащий первое коническое зубчатое колесо 68 и второе коническое зубчатое колесо 70. Блок конических зубчатых колес 66 может приводить в действие блок планетарных шестерней 72. Блок планетарных шестерней 72 может содержать ведущую шестерню 74, соединенную с приводным валом 76. Ведущая шестерня 74 может приводить в действие сопряженное кольцевое зубчатое колесо 78, которое через приводной вал 82 приводит в действие барабан с винтовым зубчатым колесом 80. Кольцо 84 может быть навинчено на барабан с винтовым зубчатым колесом 80. Таким образом, при вращении двигателя 65 кольцо 84 двигается вдоль барабана с винтовым зубчатым колесом 80 с помощью установленного блока конических зубчатых колес 66, блока планетарных шестерней 72 и кольцевого зубчатого колеса 78.
Рукоятка 6 может также содержать датчик запуска двигателя 110, который связан с пусковым устройством 20 для обнаружения того, когда пусковое устройство 20 было втянуто пользователем (или “закрыто”) в пистолетную рукоятку 26, которая является частью рукоятки 6, тем самым приводя в действие операцию рассечения/сшивания концевым зажимом 12. Датчик 110 может представлять собой пропорциональный датчик, например, реостат или резистор переменного сопротивления. Когда пусковое устройство 20 находится в прижатом состоянии, датчик 110 определяет движение и направляет электрический сигнал, указывающий на необходимость подачи электрического напряжения (или питания) к двигателю 65. Если датчик 110 является резистором переменного сопротивления или аналогичным устройством, вращение двигателя 65 может быть, как правило, пропорционально величине смещения пускового устройства 20. Таким образом, когда оператор слегка прижимает или закрывает пусковое устройство 20, двигатель 65 вращается сравнительно медленно. Когда пусковое устройство 20 полностью прижато (или находится в полностью закрытом положении), вращение двигателя 65 максимально. То есть, чем сильнее пользователь прижимает пусковое устройство 20, тем большее напряжение подается на двигатель 65, обеспечивая большую скорость вращения.
Рукоятка 6 может содержать срединную часть рукоятки 104, примыкающую к верхней части пускового устройства 20. Рукоятка 6 также может содержать смещающую пружину 112, расположенную между опорами на срединной части рукоятки 104 и пусковом устройстве 20. Смещающая пружина 112 может смещать пусковое устройство 20 в полностью открытое положение. Таким образом, когда оператор разблокирует пусковое устройство 20, смещающая пружина 112 переводит пусковое устройство 20 в открытое положение, тем самым предупреждая срабатывание датчика 110, что приводит к остановке двигателя 65. Кроме того, благодаря наличию смещающей пружины 112, каждый раз, когда пользователь закрывает пусковое устройство 20, он чувствует сопротивление, что позволяет контролировать скорость вращения двигателя 65. Также оператор может прекратить воздействие на пусковое устройство 20 и тем самым прекратить воздействие на датчик 100 и остановить двигатель 65. Таким образом, пользователь может остановить работу концевого зажима 12, что позволяет обеспечить возможность управления оператором операции по рассечению/сшиванию.
Дистальный конец барабана с винтовым зубчатым колесом 80 содержит дистальный приводной вал 120, который приводит в действие кольцевое зубчатое колесо 122, сопрягающееся с ведущей шестерней 124. Ведущая шестерня 124 соединяется с основным приводным валом 48 блока основного приводного вала. Таким образом, вращение двигателя 65 вызывает вращение группы основного приводного вала, что приводит в действие концевой зажим 12, как описано выше.
Кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, может содержать опору 86, которая установлена в прорезь 88 кулисы 90. В кулисе 90 имеется отверстие 92 на противоположном конце 94, в которое вставляется шарнирный штифт 96, расположенный между деталями внешних сторон рукоятки 59 и 60. Шарнирный штифт 96 также проходит через отверстие 100 в пусковом устройстве 20 и отверстие 102 в срединной части рукоятки 104.
Кроме того, рукоятка 6 может содержать датчик обратного действия (или датчик ограничения хода) 130 и датчик остановки двигателя (или датчик начала хода) 142. В различных вариантах осуществления датчик обратного действия 130 может являться концевым переключателем, расположенным на дистальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, контактирует с датчиком обратного действия 130 и содержит его, когда кольцо 84 достигает дистального конца барабана с винтовым зубчатым колесом 80. При активации датчик обратного действия 130 направляет сигнал на двигатель 65 об изменении направления его вращения и, после рассечения, втягивании скальпеля 32 концевого зажима 12.
Датчик останова двигателя 142 может являться, например, нормально замкнутым концевым выключателем. В различных вариантах осуществления он может располагаться на проксимальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84 переключает выключатель 142, когда кольцо 84 достигает проксимального конца барабана с винтовым зубчатым колесом 80.
Во время операции, когда оператор инструмента 10 тянет назад пусковое устройство 20, датчик 110 обнаруживает перемещение пускового устройства 20 и посылает сигнал к двигателю 65, что вызывает вращение двигателя 65 вперед, например, со скоростью, пропорциональной силе, с которой оператор оттянул назад пусковое устройство 20. Вращение двигателя вправо 65, в свою очередь, вызывает вращение кольцевого зубчатого колеса 78 на дистальном конце блока планетарных шестерней 72, тем самым активируя вращение барабана с винтовым зубчатым колесом 80 и продвижение в дистальном направлении кольца 84, навинченного на барабан с винтовым зубчатым колесом 80, вдоль барабана с винтовым зубчатым колесом 80. Вращение барабана с винтовым зубчатым колесом 80 также приводит в действие блок основного приводного вала, как описано выше, что, в свою очередь, приводит в рабочее положение скальпель 32 на концевом зажиме 12, то есть скальпель 32 и салазки 33 проходят вдоль канала 22, при этом рассекается ткань, захваченная концевым зажимом 12. К тому же, операция сшивания при помощи концевого зажима 12 может производиться в тех вариантах осуществления, где используется концевой зажим сшивающего типа.
К тому моменту, как манипуляция концевого зажима 12 по рассечению/сшиванию ткани завершена, кольцо 84 на барабане с винтовым зубчатым колесом 80 достигает дистального конца барабана 80, вызывая включение обратного датчика двигателя 130, который направляет сигнал двигателю 65 об изменении направления вращения. Это, в свою очередь, вызывает втягивание скальпеля 32 и вынуждает кольцо 84 на барабане с винтовым зубчатым колесом 80 двигаться в обратном направлении к проксимальному кольцу барабана с винтовым зубчатым колесом 80.
Срединная часть рукоятки 104 включает тыльное плечо 106, которое зацепляется за кулису 90, что наилучшим образом показано на Фиг. 8 и 9. Срединная часть рукоятки 104 также имеет ограничитель рабочего хода 107, сцепленный с пусковым устройством 20. Движение кулисы 90 управляется вращением двигателя 65, как описано выше. Когда кулиса 90 вращается против часовой стрелки таким образом, что кольцо 84 перемещается от проксимального конца винтового зубчатого колеса 80 к дистальному концу, срединная часть рукоятки 104 освобождается для вращения против часовой стрелки. Таким образом, когда пользователь тянет пусковое устройство 20, пусковое устройство 20 будет затрагивать ограничитель рабочего хода 107 срединной части рукоятки 104, что вызывает вращение срединной части рукоятки 104 против часовой стрелки. Тыльное плечо 106 цепляется за кулису 90, однако срединная часть рукоятки 104 может вращаться против часовой стрелки ровно настолько, насколько это позволяет кулиса 90. Поэтому если двигатель 65 по какой-либо причине остановит вращение, кулиса 90 остановит вращение, и пользователь не сможет дальше втягивать пусковое устройство 20, поскольку срединная часть рукоятки 104 не сможет свободно вращаться против часовой стрелки из-за кулисы 90.
Фиг. 41 и 42 изображают два состояния одного варианта осуществления регулируемого датчика, который может использоваться в качестве датчика запуска двигателя 110. Датчик 110 может содержать лицевую поверхность 280, первый электрод (A) 282, второй электрод (B) 284 и сжимающийся диэлектрический материал 286 (например, электроактивный полимер) между электродами 282, 284. Датчик 110 может быть установлен так, чтобы торцевая часть 280 контактировала с пусковым устройством 20, когда он притянут. Соответственно, когда пусковое устройство 20 притянуто, диэлектрический материал 286 сжимается, как показано на Фиг. 10 B, так 42, что электроды 282 и 284 сближаются. Так как расстояние b между электродами 282 и 284 напрямую соотносится с полным сопротивлением между электродами 282 и 284, то очевидно, что чем больше расстояние, тем больше полное сопротивление, и чем меньше расстояние, тем меньше полное сопротивление. В этом смысле степень, с которой диэлектрический материал 286 сжимается в связи со втягиванием пускового устройства 20 (обозначена как сила “F” на Фиг. 42), пропорциональна импедансу между электродами 282, 284, которые могут использоваться для пропорционального управления двигателем 65.
Компоненты примерной системы замыкания для закрывания (или зажимания) упорной пластины 24 концевого зажима 12 путем втягивания закрывающего пускового устройства 18 также изображены на Фиг. 7-10. В изображенном варианте осуществления настоящего изобретения система замыкания содержит вилку сцепления 250, присоединенную к закрывающему пусковому устройству 18 при помощи штифта 251, который продет сквозь соответствующие отверстия в закрывающем пусковом устройстве 18 и вилке сцепления 250. Шарнирный штифт 252, вокруг которого поворачивается закрывающее пусковое устройство 18, проходит через другое отверстие в закрывающем пусковом устройстве 18, которое смещено относительно места, в котором штифт 251 проходит через закрывающее пусковое устройство 18. Таким образом, втягивание закрывающего пускового устройства 18 вызывает вращение против часовой стрелки верхней части закрывающего пускового устройства 18, к которому вилка сцепления 250 присоединена при помощи штифта 251. Дистальный конец вилки сцепления 250 соединен с помощью штифта 254 с первым закрывающим кронштейном 256. Первый закрывающий кронштейн 256 соединен со вторым закрывающим кронштейном 258. Вместе закрывающие кронштейны 256 и 258 определяют отверстие, в которое вставлен и удерживается проксимальный конец проксимальной закрывающей трубки 40 (см. Фиг. 4), при этом продольное движение закрывающих кронштейнов 256 и 258 вызывает продольное перемещение проксимальной закрывающей трубки 40. Инструмент 10 также содержит закрывающий стержень 260, установленный внутри проксимальной закрывающей трубки 40. Закрывающий стержень 260 может содержать окно 261, в которое вставляется опора 263 на одной из деталей внешних сторон рукоятки, такой как деталь внешней нижней стороны 59 в приведенном варианте осуществления, жестко связывая закрывающий стержень 260 с рукояткой 6. Таким образом, проксимальная закрывающая трубка 40 способна перемещаться продольно по отношению к закрывающему стержню 260. Закрывающий стержень 260 может также содержать дистальный буртик 267, который прилегает к полости 269 в проксимальной сердцевинной трубке 46 и удерживается заглушкой 271 (см. Фиг. 4).
Во время работы, когда вилка сцепления 250 вращается из-за втягивания закрывающего пускового устройства 18, закрывающие кронштейны 256, 258 вызывают перемещение проксимальной закрывающей трубки 40 дистально (например, в сторону от конца рукоятки инструмента 10), что вызывает перемещение дистальной закрывающей трубки 42 дистально, что приводит во вращение упорную пластину 24 вокруг упора шарнира 25 до зажатого или закрытого положения. Когда закрывающее пусковое устройство 18 разблокировано из блокирующего положения, проксимальная закрывающая трубка 40 начинает скользить проксимально, что вызывает проксимальное скольжение дистальной закрывающей трубки 42, которое, в силу того, что контакт 27 был вставлен в отверстие 45 дистальной закрывающей трубки 42, вызывает поворот упорной пластины 24 вокруг упора шарнира 25 до открытого, или незажатого, положения. Таким образом, притягивая и блокируя закрывающее пусковое устройство 18, оператор может зажимать ткань между упорной пластиной 24 и желобом 22, а также освобождать ее после рассечения/сшивания, вернув закрывающее пусковое устройство 18 из закрытого положения.
Фиг. 11 является схематическим изображением одного варианта осуществления электрической цепи инструмента 10. Когда оператор сначала тянет пусковое устройство 20 после блокировки закрывающего пускового устройства 18, активируется датчик 110, который обеспечивает течение тока через него. Если в обычном состоянии открытый переключатель датчика обратного действия 130 открыт (что означает, что конец хода концевого зажима не был достигнут), ток будет протекать по направлению к однополюсному реле на два направления 132. Если переключатель датчика обратного действия 130 не закрыт, то катушка 134 реле 132 не будет подключена к источнику питания, поэтому реле 132 будет находиться в отключенном от источника питания состоянии. Цепь также содержит переключатель датчика блокировки кассеты 136. Если концевой зажим 12 содержит кассету с шовными скобками 34, то переключатель датчика 136 будет находиться в закрытом положении, обеспечивая течение тока. В ином случае, если концевой зажим 12 не содержит кассету с шовными скобками 34, то переключатель датчика 136 будет открыт, что предотвращает возможность питания двигателя 65 от батареи 64. Как более подробно обсуждается ниже, когда батарея 64 вставлена в инструмент 10, резистивный элемент 65 может быть включен в электрическую цепь для разрядки батареи 64.
При наличии кассеты с шовными скобками 34 переключатель датчика 136 закрыт, что обеспечивает подключение к источнику питания однополюсного реле на одно направление 138. Когда реле 138 находится в возбужденном состоянии, ток протекает через датчик 138 и датчик резистора переменного сопротивления 110 к двигателю 65 через двухполюсное реле на два направления 140, таким образом питая двигатель 65 и позволяя ему вращаться в прямом направлении.
Когда концевой зажим 12 достигает конца хода, активируется датчик обратного действия 130, замыкая переключатель 130 и пропуская ток к реле 132. Это позволяет реле 132 находиться в состоянии подключения к источнику питания (не показано на Фиг. 11), что вызывает течение тока в обход переключателя датчика блокировки кассеты 136 и резистора переменного сопротивления 110, и взамен этого вызывает подачу тока на в обычном состоянии открытое двухполюсное реле на два направления 140 и возвращается к двигателю 65 через реле 140, что вызывает изменение направления вращения двигателя 65.
Поскольку переключатель датчика остановки двигателя 142 в обычном состоянии закрыт, то ток будет подаваться назад на реле 132 для поддержания его подключения к источнику питания до тех пор, пока переключатель 142 не будет открыт. Когда скальпель 32 полностью втянут, переключатель датчика остановки двигателя 142 активируется и открывается, прекращая тем самым подачу питания на двигатель 65.
В других вариантах осуществления вместо пропорционального датчика 110 может использоваться двухпозиционный датчик. В таких вариантах осуществления скорость вращения двигателя 65 может не быть пропорциональной силе, приложенной оператором. Как правило, двигатель 65 может вращаться в целом с постоянной скоростью. Тем не менее оператор получает обратную связь относительно усилия, так как пусковое устройство 20 включено в цепь зубчатых передач привода.
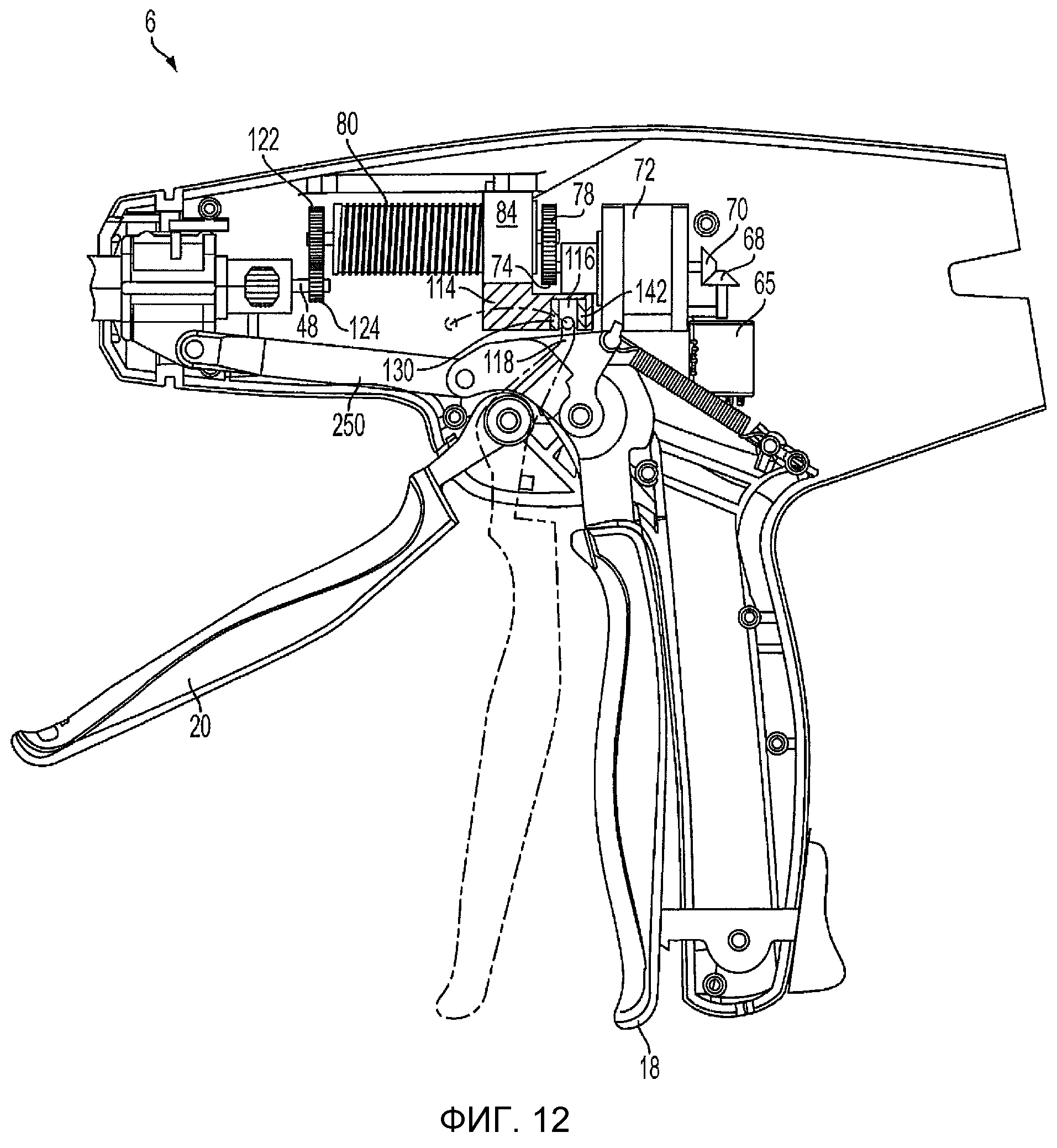
На Фиг. 12 представлен вид сбоку бранши 6 хирургического инструмента с усиленным автоматическим эндокатером согласно другому варианту осуществления. Вариант осуществления настоящего изобретения с Фиг. 12 похож на вариант осуществления с Фиг. 7-10 за исключением того, что вариант осуществления настоящего изобретения, представленный на Фиг. 12, не имеет кулисы 90, соединенной с кольцом 84, которое надето на винтовое зубчатое колесо 80. Вместо этого в варианте осуществления, представленном на Фиг. 12, кольцо 84 содержит часть с датчиком 114, которая перемещается с кольцом 84, когда кольцо 84 продвигается вперед (и назад) по барабану с винтовым зубчатым колесом 80. Часть с датчиком 114 содержит выемку 116. Датчик обратного действия 130 может быть расположен на дистальном конце выемки 116, и датчик останова двигателя 142 может быть расположен на проксимальном конце выемки 116. Когда кольцо 84 продвигается вперед (и назад) по барабану с винтовым зубчатым колесом 80, часть с датчиком 114 продвигается вместе с ним. Кроме того, как показано на Фиг. 12, срединная часть 104 может иметь плечо 118, которое входит в выемку 116.
Во время работы, когда оператор инструмента 10 прижимает пусковое устройство 20 к пистолетной рукоятке 26, датчик пуска двигателя 110 определяет движение и направляет сигнал к началу работы двигателю 65, что вызывает, помимо прочего, вращение барабана с винтовым зубчатым колесом 80. Когда барабан с винтовым зубчатым колесом 80 вращается, кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, продвигается в прямом направлении (или в обратном, в зависимости от направления вращения). Кроме того, при втягивании пускового устройства 20 срединная часть рукоятки 104 начинает вращаться против часовой стрелки с пусковым устройством 20 до ограничителя рабочего хода 107, который цепляется за пусковое устройство 20. Вращение срединной части рукоятки 104 против часовой стрелки вызывает такое вращение плеча 118 против часовой стрелки с частью с датчиком 114 кольца 84, что плечо 118 остается расположенным в выемке 116. Когда кольцо 84 достигает дистального конца барабана с винтовым зубчатым колесом 80, плечо 118 контактирует с датчиком обратного действия 130 и тем самым активирует его. Аналогичным образом, когда кольцо 84 достигает проксимального конца барабана с винтовым зубчатым колесом 80, плечо 118 контактирует с датчиком остановки двигателя 142 и тем самым активирует его. Описанным выше образом эти действия могут соответственно обратить и остановить двигатель 65.
На Фиг. 13 представлен вид сбоку бранши 6 с усиленным автоматическим эндокатером согласно другому варианту осуществления. Вариант осуществления, представленный на Фиг. 13, аналогичен варианту осуществления, представленному на Фиг. 7-10, за исключением того, что в варианте осуществления, представленном на Фиг. 13, кулиса 90 не имеет прорези. Вместо этого кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, имеет вертикальный канал 126. Вместо прорези кулиса 90 имеет опору 128, которая расположена в канале 126. Когда барабан с винтовым зубчатым колесом 80 вращается, кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, продвигается в прямом направлении (или в обратном, в зависимости от направления вращения). Плечо 90 вращается против часовой стрелки таким образом, что кольцо 84 продвигается в прямом направлении до опоры 128, которая расположена в желобе 126, как показано на Фиг. 13.
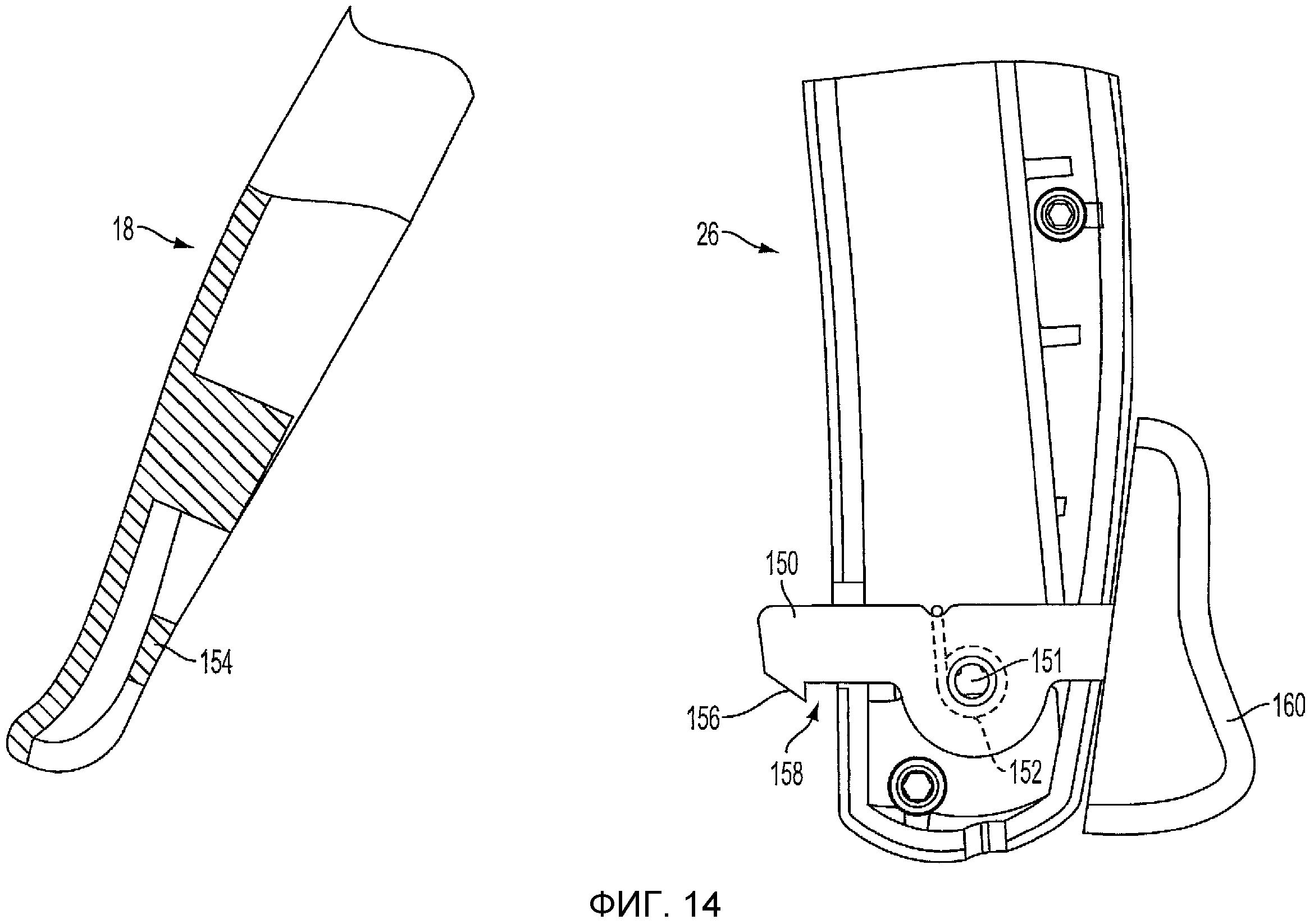
Как было указано выше, при использовании двухтактного автоматического инструмента оператор сначала притягивает и блокирует закрывающее пусковое устройство 18. Фиг. 14 и 15 изображают один вариант осуществления настоящего изобретения закрывающего пускового устройства 18 и механизма блокировки закрывающего пускового устройства 18 пистолетной рукоятки 26, которая является частью рукоятки 6. В изображенном варианте осуществления настоящего изобретения пистолетная рукоятка 26 содержит крючок 150, который способен к вращению против часовой стрелки вокруг упора шарнира 151 под действием торсионной пружины 152. Закрывающее пусковое устройство 18 также содержит запирающую пластину 154. Когда оператор тянет закрывающее пусковое устройство 18, металлическая накладка 154 захватывает наклонную часть 156 крючка 150, что вызывает вращение крючка 150 вверх (или по часовой стрелке на Фиг. 14-15) до тех пор, пока металлическая накладка 154 полностью не пройдет по наклонной части 156 в утопленную выемку 158 крючка 150, которая блокирует закрывающее пусковое устройство 18 на месте. Оператор может разблокировать закрывающее пусковое устройство 18, сдвигая вниз скользящую пусковую кнопку 160 на задней или противоположной стороне пистолетной рукоятки 26. Сдвиг вниз скользящей пусковой кнопки 160 вращает крючок 150 против часовой стрелки так, что металлическая накладка 154 выдвигается из утопленной выемки 158.
На Фиг. 16 показан другой механизм фиксации закрывающего пускового устройства в соответствии с различными вариантами осуществления. В варианте осуществления, представленном на Фиг. 16, закрывающее пусковое устройство 18 содержит клин 160, имеющий стреловидную часть 161, Стреловидная часть 161 смещается вниз (или по часовой стрелке) при помощи пластинчатой пружины 162. Клин 160 и пластинчатая пружина 162 могут быть выполнены, например, из формованного пластика. Когда закрывающее пусковое устройство 18 притянуто, стреловидная часть 161 вставлена в отверстие 164 в пистолетной рукоятке 26 рукоятки 6. Нижняя скошенная поверхность 166 стреловидной части 161 захватывает нижнюю боковую стенку 168 отверстия 164, что вызывает вращение стреловидной части 161 против часовой стрелки. В конечном счете, нижняя скошенная поверхность 166 полностью покрывает боковую стенку 168, что устраняет силу, вызывающую вращение против часовой стрелки стреловидной части 161, и вызывает скольжение нижней боковой поверхности 168 в заблокированное положение в выемке 170, которая находится за стреловидной частью 161.
Для разблокирования закрывающего пускового устройства 18 пользователь нажимает кнопку 172 на обратной стороне закрывающего пускового устройства 18, что вызывает вращение стреловидной части 161 против часовой стрелки, и позволяет стреловидной части 161 скользить в отверстие 164.
Фиг. 17-22 изображают другой вариант осуществления спускового крючка блокировочного механизма. Как показано в этом варианте осуществления, закрывающее пусковое устройство 18 содержит гибкое продольное плечо 176, имеющее выступающий боковой шип 178. Плечо 176 и шип 178 могут быть выполнены, например, из формованного пластика. Пистолетная рукоятка 26 бранши 6 имеет отверстие 180 с расположенным внутри него латерально расширяющимся клином 182. Когда закрывающее пусковое устройство 18 втянуто, штифт 178 задевает клин 182, и штифт 178 перемещается вниз (например, плечо 176 вращается по часовой стрелке) при помощи нижней поверхности 184 клина 182, как показано на Фиг. 17 и 18. Штифт 178 полностью проходит нижнюю поверхность 184, что устраняет силу, вызывающую вращение по часовой стрелке плеча 176, и штифт 178 вращается против часовой стрелки так, что штифт 178 приходит в состояние покоя в выемке 186, которая находится за клином 182, как показано на Фиг. 19, тем самым блокируя закрывающее пусковое устройство 18. Штифт 178 удерживается на месте в закрытом положении гибким ограничителем 188, выступающим из клина 184.
Чтобы разблокировать закрывающее пусковое устройство 18, оператор может дополнительно надавить на закрывающее пусковое устройство 18, чтобы штифт 178 продвинулся до наклонной задней стенки 190 отверстия 180, при этом штифт 178 вынужденно продвигается по направлению вверх мимо гибкого ограничителя 188, как показано на Фиг. 20 и 21. Затем штифт 178 свободно выходит через верхний канал 192 отверстия 180, при этом закрывающее пусковое устройство 18 перестает фиксироваться на пистолетной рукоятке 26, как показано на Фиг. 22.
Фиг. 23A-B изображают карданное сочленение (“универсальный шарнир”) 195, который может быть использован в точке сочленения хирургического инструмента, такого как инструмент 10. Вторая деталь 195-2 u-образного шарнира 195 вращается в горизонтальной плоскости, в которой расположена первая деталь 195-1. На Фиг. 23 A показан u-образный шарнир 195 в линейном (180°) расположении, на Фиг. 23 B показан u-образный шарнир 195 в расположении приблизительно на 150°. U-образный шарнир 195 может быть использован вместо конических зубчатых колес 52 a-c (см. для примера Фиг. 4) в шарнирном сочленении 14 блока основного приводного вала для подвижного присоединения концевого зажима 12. На Фиг. 24A-B показан кабель кручения 197, который может быть использован как вместо конических зубчатых колес 52 a-c, так и вместо u-образного шарнира 195 для подвижного присоединения концевого зажима 12.
На Фиг. 25-31 изображен другой вариант осуществления автоматического двухтактного хирургического режущего и сшивающего инструмента 10 с усилителем. Вариант осуществления, представленный на Фиг. 25-31, аналогичен варианту, представленному на Фиг. 6-10, за исключением того, что вместо барабана с винтовым зубчатым колесом 80 вариант осуществления, представленный на Фиг. 25-31, содержит альтернативную группу зубчатой передачи. Вариант осуществления, представленный на Фиг. 25-31, содержит блок редуктора 200, содержащий несколько зубчатых передач, расположенных в рамке 201, при этом зубчатые передачи располагаются между планетарной шестерней 72 и ведущей шестерней 124 на проксимальном конце приводного вала 48. Как описано ниже, блок редуктора 200 обеспечивает обратную связь с пользователем через пусковое устройство 20, информируя о приведении в рабочее положение и силе нагрузки концевого зажима 12. Также пользователь может приложить силу к системе через блок редуктора 200, обеспечивая приведение концевого зажима 12 в рабочее положение. В этом смысле, как и в описанных выше вариантах осуществления, вариант осуществления настоящего изобретения, изображенный на Фиг. 25-31, представляет собой другой приводной инструмент 10 с усилителем, который обеспечивает обратную связь с пользователем в зависимости от силы, которая прикладывается к режущему инструменту 32.
В изображенном варианте осуществления пусковое устройство 20 состоит из двух частей: основной части 202 и жесткой части 204. Основная часть 202 может быть выполнена, например, из пластика, а жесткая часть 204 может быть выполнена из более твердого материала, например, металла. В описанном варианте осуществления жесткая часть 204 примыкает к основной части 202, однако в соответствии с другими вариантами осуществления жесткая часть 204 может быть помещена внутрь основной части 202. Шарнирный штифт 207 может проходить через отверстия в частях 202 и 204 пускового устройства и являться точкой, вокруг которой вращается пусковое устройство 20. Кроме того, пружина 222 может приводить во вращение пусковое устройство 20 в направлении против часовой стрелки. Дистальный конец пружины 222 может быть связан с штифтов 224, который связан с частями 202 и 204 пускового устройства 20. Проксимальный конец пружины 222 может быть связан с одной из деталей внешней нижней стороны 59 и 60 рукоятки.
В изображенном варианте осуществления настоящего изобретения главная часть 202 и жесткая часть 204 содержат передающие части 206, 208 (соответственно) на своих верхних концевых частях. Передающие части 206 и 208 зацепляют передачу редуктора в сборе 200, как описано ниже, приводя в движение группу основного приводного вала и обеспечивая пользователям обратную связь относительно приведения концевого зажима 12 в рабочее положение.
Редуктор в сборе 200 может содержать, как показано в представленном варианте осуществления, 6 (шесть) зубчатых колес. Первое зубчатое колесо 210 блока редуктора 200 зацепляет передающие части 206 и 208 пускового устройства 20. Кроме того, первое зубчатое колесо 210 сцепляется с меньшим по размеру вторым зубчатым колесом 212, меньшее второе зубчатое колесо 212 расположено соосно с большим третьим зубчатым колесом 214. Третье зубчатое колесо 214 сцепляется с меньшим четвертым зубчатым колесом 216, меньшее четвертое зубчатое колесо 216 соосно с пятым зубчатым колесом 218. Пятое зубчатое колесо 218 является 90° коническим зубчатым колесом, которое сцепляется с сопряженным 90° коническим зубчатым колесом 220 (лучше всего показано на Фиг. 31), которое соединено с ведущей шестерней 124, которая приводит в движение основной приводной вал 48.
В процессе работы, когда пользователь прижимает пусковое устройство 20, датчик запуска двигателя (не показан) активируется, направляя сигнал двигателю 65 к вращению со скоростью, пропорциональной усилию или силе, с которой оператор притягивает пусковое устройство 20, что заставляет двигатель 65 вращаться со скоростью, пропорциональной сигналу от датчика. В данном варианте осуществления датчик не показан, однако он может быть подобен датчику пуска двигателя 110, описанному выше. Датчик может быть расположен в бранше 6 таким образом, чтобы он подвергался нажатию при притягивании пускового устройства 20. Также вместо пропорционального датчика может использоваться двухпозиционный датчик.
Вращение двигателя 65 вызывает вращение конических зубчатых колес 66 и 70, что, в свою очередь, вызывает вращение планетарной шестерни 72 и - через приводной вал 76 - вращение кольцевого зубчатого колеса 122. Кольцевое зубчатое колесо 122 зацепляет ведущую шестерню 124, которая соединена с основным приводным валом 48. Таким образом, вращение ведущей шестерни 124 приводит в действие основной приводной вал 48, что инициирует операцию по рассечению/сшиванию концевым зажимом 12.
Вращение ведущей шестерни 124 в прямом направлении, в свою очередь, вызывает вращение конического зубчатого колеса 220, что при неподвижных зубчатых передачах редуктора в сборе 200 вызывает вращение первого зубчатого колеса 210. Первое зубчатое колесо 210 зацепляет передающие части 206, 208 пускового устройства 20, тем самым вызывая вращение пускового устройства 20 против часовой стрелки, когда двигатель 65 обеспечивает движение вперед концевого зажима 12 (и вращения против часовой стрелки, когда двигатель 65 вращается в обратном направлении для втягивания концевого зажима 12). Таким образом, пользователь получает обратную связь относительно силы нагрузки и приведения концевого зажима 12 в рабочее положение при нажатии на пусковое устройство 20. Так, когда пользователь притягивает пусковое устройство 20, он испытывает сопротивление, связанное с силой нагрузки, приложенной к концевому зажиму 12. Аналогичным образом, когда оператор отпускает пусковое устройство 20 после операции рассечения/сшивания так, что оно может вернуться в свое исходное положение, пользователь может ощутить силу вращения по часовой стрелке пускового устройства 20, которая, как правило, пропорциональна скорости обратного хода двигателя 65.
Необходимо отметить, что данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе двигателя 65), чтобы привести в действие блок основного приводного вала (и, следовательно, концевой зажим 12 во время операции по рассечению/сшиванию), притягивая пусковое устройство 20. Т.е. притягивание пускового устройства 20 вызывает вращение передающих частей 206, 208 против часовой стрелки, которое вызывает вращение зубчатых передач редуктора в сборе 200, тем самым вызывая вращение ведущей шестерни 124, которая вызывает вращение основного приводного вала 48.
На Фиг. 25-31 это не показано, однако инструмент 10 может дополнительно содержать датчик обратного движения двигателя и датчик останова двигателя. Как было описано выше, датчики обратного хода двигателя и остановки двигателя могут обнаруживать, соответственно, конец рабочего хода (полное перемещение скальпеля 32 и салазок 33) и конец операции втягивания (полное втягивание скальпеля 32). Цепь, схожая с цепью, которая была описана выше в связи с Фиг. 11, может использоваться для надлежащего питания двигателя 65.
Фиг. 32-36 изображают другой вариант осуществления двухтактного приводного хирургического режущего и сшивающего инструмента 10 с усилением. Вариант осуществления, представленный на Фиг. 32-36, аналогичен варианту, представленному на Фиг. 25-31, за исключением того, что в варианте осуществления, представленном на Фиг. 32-36, пусковое устройство 20 содержит нижнюю часть 228 и верхнюю часть 230. Обе части 228 и 230 связаны между собой и вращаются вокруг шарнирного штифта 207, который проходит через каждую часть 228 и 230. Верхняя часть 230 содержит передающую часть 232, которая зацепляется за первое зубчатое колесо 210 блока редуктора 200. Пружина 222 соединена с верхней частью 230 так, что верхняя часть приводится во вращение по часовой стрелке. Верхняя часть 230 может также содержать нижнее плечо 234, которое контактирует с верхней поверхностью нижней части 228 пускового устройства 20 так, что это вызывает вращение верхней части 230 по часовой стрелке так, что нижняя часть 228 также вращается по часовой стрелке, и когда нижняя часть 228 вращается против часовой стрелки, то верхняя часть 230 также вращается против часовой стрелки. Аналогичным образом, нижняя часть 228 содержит останов после поворота 238, который зацепляет нижнее плечо верхней части 230. Поэтому когда верхняя часть 230 вращается против часовой стрелки, то нижняя часть 228 также вращается против часовой стрелки, и когда нижняя часть 228 вращается по часовой стрелке, то верхняя часть 230 также вращается по часовой стрелке.
Данный вариант осуществления также содержит датчик запуска двигателя 110, который направляет сигнал к двигателю 65, что в различных вариантах осуществления может вызывать вращение двигателя 65 со скоростью, пропорциональной силе, приложенной оператором при притягивании пускового устройства 20. Датчик 110 может являться, например, реостатом или иным датчиком переменного сопротивления, как описано в настоящем документе. Кроме того, инструмент 10 может содержать датчик обратного действия 130, который выключается или включается при контакте с передней поверхностью 242 верхней части 230 пускового устройства 20. После приведения в действие датчик обратного действия 130 направляет сигнал двигателю 65 об изменении направления вращения. Кроме того, инструмент 10 может содержать датчик останова двигателя 142, который задействуется или срабатывает в случае контакта с нижней частью 228 пускового устройства 20. После приведения в действие датчик останова двигателя 142 направляет сигнал двигателю 65 о прекращении вращения в обратном направлении.
Во время работы, когда оператор оттягивает закрывающее пусковое устройство 18 в заблокированное положение, пусковое устройство 20 слегка втягивается так (в соответствии с механизмами, известными в данной области техники, включая патент США № 6978921 под названием “Surgical Stapling Instrument Incorporating An E-Beam Firing Mechanism” и патент США № 6905057 под названием “Surgical Stapling Instrument Incorporating A Firing Mechanism Having A Linked Rack Transmission,” которые включены в настоящий документ в виде ссылки), что пользователь может понять, что пусковое устройство 20 готово к операции рассечения/сшивания, как показано на Фиг. 32 и 33. В этот момент, как показано на Фиг. 33, передаточная часть 232 верхней части 230 пускового устройства 20 приходит в зацепление с первым зубчатым колесом 210 блока редуктора 200.Когда оператор притягивает пусковое устройство 20, в соответствии с различными вариантами осуществления, пусковое устройство 20 может немного повернуться, например, на пять градусов, прежде чем сдвинуть датчик запуска двигателя 110, как показано на Фиг. 34. Активация датчика 110 вызывает вращение двигателя 65 в прямом направлении со скоростью, пропорциональной силе, которую прикладывает оператор. Вращение двигателя 65 вперед вызывает, как было описано выше, вращение основного приводного вала 48, что вызывает разблокировку скальпеля 32 в концевом зажиме 12 (например, он начинает перемещаться по желобу 22). Вращение ведущей шестерни 124, которая связана с основным приводным валом 48, вызывает вращение зубчатых колес 210 и 220 в редукторе в сборе 200. Когда первое зубчатое колесо 210 сцепляется с зубчатой частью 232 верхней части 230 пускового устройства 20, верхняя часть 230 начинает вращаться против часовой стрелки, что вызывает вращение нижней части 228 против часовой стрелки.
Когда скальпель 32 полностью разблокирован (например, в конце рабочего хода), передняя поверхность 242 верхней части 230 отключает датчик обратного хода 130, который посылает сигнал двигателю 65 для вращательного движения в обратном направлении. Это вызывает изменение направления вращения блока основного приводного вала и втягивание скальпеля 32. Изменение направления вращения блока основного приводного вала вызывает вращение зубчатых колес 210-220 в редукторе в сборе в обратном направлении, что вызывает вращение верхней части 230 пускового устройства 20 по часовой стрелке, что вызывает вращение нижней части 228 пускового устройства 20 по часовой стрелке до тех пор, пока передняя поверхность 242 верхней части 230 не включит или активирует датчик останова двигателя 142, когда скальпель 32 полностью втянут, что вызывает остановку двигателя 65. Таким образом, пользователь получает обратную связь относительно приведения концевого зажима 12 в рабочее положение при нажатии на пусковое устройство 20. Так, когда пользователь притягивает пусковое устройство 20, он испытывает сопротивление, соотносимое с приведением концевого зажима 12 в рабочее положение и в частности с силой нагрузки, приложенной к скальпелю 32. Аналогичным образом, когда оператор отпускает пусковое устройство 20 после операции рассечения/сшивания так, что оно может вернуться в свое исходное положение, пользователь может ощутить силу вращения по часовой стрелке пускового устройства 20, которая, как правило, пропорциональна скорости обратного хода двигателя 65.
Необходимо отметить, что данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе двигателя 65), чтобы привести в действие блок основного приводного вала (и, следовательно, концевой зажим 12 во время операции по рассечению/сшиванию), притягивая пусковое устройство 20. Т.е. втягивание пускового устройства 20 вызывает вращение зубчатой части 232 верхней части 230 против часовой стрелки, которое вызывает вращение зубчатых колес в редукторе в сборе 200, тем самым вызывая вращение ведущей шестерни 124, которая вызывает вращение основного приводного вала в сборе.
В вышеописанных вариантах осуществления используются системы усиления обратной связи с пользователем, при наличии или без адаптивного управления (например, использование датчиков 110, 130 и 142 снаружи замкнутой системы из двигателя, цепи зубчатых передач привода и концевого зажима) двухтактным приводным хирургическим режущим и сшивающим инструментом. То есть сила, приложенная пользователем для притягивания пускового устройства 20, может являться дополнением к силе, приложенной двигателем 65, вследствие того, что пусковое устройство 20 включено (напрямую или опосредованно) в цепь зубчатых передач привода между двигателем 65 и основным приводным валом 48. В других вариантах осуществления пользователю может быть предоставлена тактильная обратная связь, касающаяся положения скальпеля 32 в концевом зажиме 12, но в которой отсутствует пусковое устройство 20, сцепленное в цепь зубчатых передач привода. Фиг. 37-40 изображают один вариант осуществления приводного хирургического режущего и сшивающего инструмента 10 с системой тактильной обратной связи.
В показанном на Фиг. 37-40 варианте осуществления пусковое устройство 20 может иметь нижнюю часть 228 и верхнюю часть 230, по аналогии с инструментом 10, показанным на Фиг. 32-36. Однако в отличие от варианта осуществления, изображенного на Фиг. 32-36, верхняя часть 230 не имеет передаточной части, которая сопрягается с частью цепи зубчатых передач привода. Вместо этого инструмент 10 имеет второй двигатель 265 с навинченным на него резьбовым стержнем 266. В то время как двигатель 265 вращается, резьбовой стержень 266 совершает продольные возвратно-поступательные движения в или из двигателя 265, в зависимости от направления вращения. Инструмент 10 также имеет датчик положения 268, который реагирует на вращение основного приводного вала 48, преобразовывая инкрементное вращательное движение основного приводного вала 48 (или другого компонента основной приводной группы), например, в соответствующие серии цифровых сигналов. В изображенном варианте осуществления ведущая шестерня 124 включает проксимальный приводной вал 270, который соединен с датчиком положения 268.
Инструмент 10 также включает систему управления (не показана), которая может быть реализована с помощью микроконтроллера или иной интегральной схемы, принимающей цифровые сигналы от датчика положения 268. На базе сигналов от датчика положения 268 схема управления может определять степень наложения скальпеля 32 в концевом зажиме 12. То есть схема управления может определять, находится ли скальпель 32 в полностью рабочем, полностью втянутом или промежуточном положении. Определив рабочее положение концевого зажима 12, система управления может направить сигнал второму двигателю 265, управляя его вращением и, таким образом, возвратно-поступательными движениями резьбового стержня 266.
В процессе работы, как показано на Фиг. 37, когда закрывающее пусковое устройство 18 не заблокировано в прижатом положении, пусковое устройство 20 поворачивается от пистолетной рукоятки 26 рукоятки 6, при этом фронтальная поверхность 242 верхней части 230 пускового устройства 20 не соприкасается с проксимальным концом резьбового стержня 266. Когда оператор притягивает закрывающее пусковое устройство 18 и блокирует его в закрытом положении, пусковое устройство 18 несколько поворачивается в направлении закрывающего пускового устройства 20, при этом оператор может зажать пусковое устройство 20, как показано на Фиг. 38. В этом положении фронтальная поверхность 242 верхней части 230 контактирует с проксимальным концом резьбового стержня 266.
Когда пользователь втягивает пусковое устройство 20, после определенного количества оборотов (например, 5 градусов вращения) датчик запуска двигателя 110 может быть активирован описанным выше способом, и датчик 110 посылает сигнал к двигателю 65, чтобы он вращался вперед со скоростью, пропорциональной силе втягивания, приложенной оператором к пусковому устройству 20. Вращение двигателя 65 в прямом направлении через цепь зубчатых передач привода вызывает вращение основного приводного вала 48, что вынуждает скальпель 32 и салазки 33 спускаться вниз по каналу 22 и рассекать ткань, захваченную концевым зажимом 12. Система управления получает выходные сигналы с датчика положения 268 относительно инкрементного вращения блока основного приводного вала и направляет сигнал второму двигателю 265, вызывая его вращение, в результате чего резьбовой стержень 266 втягивается в двигатель 265. Это позволяет верхней части 230 пускового устройства 20 вращаться против часовой стрелки, что позволяет нижней части 228 пускового устройства также вращаться против часовой стрелки. Таким образом, поскольку возвратно-поступательное движение резьбового стержня 266 связано с вращением блока основного приводного вала, оператор инструмента 10, прижимая пусковое устройство 20, получает тактильную обратную связь о положении концевого зажима 12. Однако сила притягивания, которую прикладывает оператор, не влияет напрямую на движение блока основного приводного вала, так как в данном варианте осуществления пусковое устройство 20 не является частью цепи зубчатых передач привода.
В силу отслеживания инкрементального вращения блока основного приводного вала при помощи выходных сигналов датчика положения 268 система управления может рассчитать, когда скальпель 32 полностью наложен (например, полностью вытянут). В этот момент система управления может направить сигнал двигателю 65 об изменении направления для втягивания скальпеля 32. Вращения двигателя 65 в обратном направлении вызывает изменение направления вращения блока основного приводного вала, что определяется датчиком положения 268. На базе сигнала датчика положения 268 о вращении в обратном направлении система управления направляет сигнал второму двигателю 265, вынуждая его изменить направление вращения на противоположное, при этом резьбовый стержень 266 начинает выдвигаться в продольном направлении из двигателя 265. Это движение вызывает вращение верхней части 230 пускового устройства 20 по часовой стрелке, что вызывает вращение нижней части 228 по часовой стрелке. Поэтому оператор может почувствовать силу движения по часовой стрелке пускового устройства 20, которая обеспечивает обратную связь с оператором относительно втянутого положения скальпеля 32 в концевом зажиме 12. Система управления может определить, когда скальпель 32 находится в полностью втянутом положении. В этот момент система управления может направить сигнал двигателю 65 для остановки вращения.
В соответствии с другими вариантами осуществления, вместо системы управления, определяющей положение скальпеля 32, могут быть использованы датчик обратного движения двигателя и датчик останова двигателя, как описано выше. Кроме того, вместо пропорционального датчика 110 для управления вращением двигателя 65 может использоваться двухпозиционный датчик. В таком варианте осуществления оператор не может контролировать скорость вращения двигателя 65, однако двигатель может вращаться с предварительно определенной скоростью.
Фиг. 43 является частичным поперечным сечением хирургического инструмента 300 с различными компонентами, которые были удалены для ясности. Хирургический инструмент 300 имеет зубчатую рейку 302 (показана на поперечном сечении) для управления концевым зажимом (не показан). Ведущая шестерня 304 сцепляется с зубчатой рейкой 302 так, что вращение ведущей шестерни 304 против часовой стрелки перемещает дистально зубчатую рейку 302, и вращение ведущей шестерни 304 по часовой стрелке перемещает проксимально зубчатую рейку 302. Ведущая шестерня 304 может вращаться вокруг оси 306 и может приводиться в движение двигателем, который эксплуатационно управляется пусковым устройством (не показано). В одном варианте осуществления ведущая шестерня 304 может приводиться в движение в первом направлении 303 при помощи смещающего элемента 308. Смещающий элемент 308 может быть пружиной, которая изображена в настоящем документе, хотя может использоваться любое другое подходящее приспособление для смещения. Хирургический инструмент 300 может иметь рычажок 310, который может использоваться, например, в том случае, если уровень энергии в источнике питания хирургического инструмента падает ниже достаточного для работы уровня. В одном варианте осуществления рычажок 310 обычно скрыт от пользователя крышкой 312, которая может быть удалена пользователем для доступа к рычажку 310. Рычажок 310 может поворачиваться вокруг стержня 314 в указанном стрелкой направлении 316. Запорная защелка 318 может быть присоединена к рычажку 310 таким образом, что вращение рычажка 310 вокруг стержня 314 вращает запорную защелку 318. В некоторых вариантах осуществления запорная защелка 318 является одним целым с рычажком 310.
Фиг. 44A и 44B изображают запорную защелку 318 во время различных режимов работы. Запорная защелка 318 имеет основную часть 320 и пружинящую часть 322, которая имеет стержень, или наоборот является гибкой относительно петельной части 324 основной части 320. Петельная часть 324 может содержать, например, гибкий шарнир. В одном варианте осуществления основная часть 320 и пружинящая часть 322 являются одним целым и формируются из цельного куска материала. Запорная защелка 318 может иметь пространство 326, которое позволяет пружинящей части 322 поворачиваться в сторону основной части 320. Пружинящая часть 322 может иметь зубец 331, который входит в выемку 321 основной части 320. На соответствующих внешних перифериях основная часть 320 может иметь первую контактирующую поверхность 328, и пружинящая часть 322 может иметь вторую контактирующую поверхность 330. В закрытом положении (Фиг. 44A) первая контактирующая поверхность 328 в целом соответствует второй контактирующей поверхности 330 так, что внешняя периферия запорной защелки 318 имеет в целом непрерывную криволинейную поверхность. В открытом положении (Фиг. 44B) пружинящая часть 322 поворачивается в сторону от основной части 320, что увеличивает пространство 326. Зазор 332 образуется между первой контактирующей поверхностью 328 и второй контактирующей поверхностью 330.
Возвращаясь к Фиг. 43, 44A и 44B, при вращении рычажка 310 в направлении, указанном стрелкой 316, запорная защелка 318 поворачивается, и вторая наружная поверхность 330 пружинящей части 322 первой контактирует с верхней поверхностью 342 ведущей шестерни 304. В результате этого контакта пружинящая часть 322 поворачивается в сторону основной части 320 для образования в целом непрерывной периферии. Пока запорная защелка 318 продолжает вращаться, вторая контактирующая поверхность 330, а затем и первая контактирующая поверхность 328 прикладывают силу к ведущей шестерне 304 для преодоления смещающей силы, прикладываемой смещающим элементом 308. В результате ведущая шестерня 304 проталкивается в направлении, указанном стрелкой 324, аналогично рычажку 310, который вращается в направлении, указанном стрелкой 316. Движение ведущей шестерни 304 расцепляет ее с зубчатой рейкой 320, что позволяет зубчатой рейке 320 свободно перемещаться. Как только пружинящая часть 322 оставляет верхнюю поверхность 342 ведущей шестерни 304, она поворачивается в открытое положение (Фиг. 44B) для блокирования на месте запорной защелки 318. После открытого положения запирающая защелка 318 может препятствовать вращению в направлении, указанном стрелкой 344 (Фиг. 43), из-за сцепления пружинящей части 322 с ведущей шестерней 304.
Фиг. 45A, 45B и 45C изображают запорную защелку 418 и шестерню 404 во время трех режимов работы. Для ясности были удалены и/или упрощены различные компоненты. Как было показано, запорная защелка 418 может быть изготовлена из цельного куска материала. Запорная защелка 418 содержит пружинящую часть 422, которая поворачивается относительно основной части 420. Фиг. 45A изображает запорную защелку 418 в несцепленном положении. В этом положении дистальная часть 423 пружинящей части 422 отделена от основной части 420. Как показано на Фиг. 45B, когда запорная защелка 418 поворачивается в направлении, указанном стрелкой 416, пружинящая часть 422 поворачивается к основной части 420 для образования в целом непрерывного периферического перекрытия пружинящей части 422 и основной части 420. Пока запорная защелка 418 контактирует с центральным узлом 442, ведущая шестерня 404 движется в направлении, указанном стрелкой 443. Пока запорная защелка 418 продолжает вращаться в направлении, указанном стрелкой 416, в конечном счете пружинящая часть 422 проходит над центральным узлом 442. Как показано на Фиг. 45C, когда дистальная часть 423 пружинящей части 422 отделяется от основной части 420, она сцепляется с зубцом ведущей шестерни 404 для блокирования запорной защелки 418 в сцепленном положении. Соответственно, в различных вариантах осуществления, в которых запорная защелка 418 может быть изготовлена из цельного куска материала, она может функционировать в виде двух частей (например, кулачка и блокирующего механизма).
Фиг. 46 изображает один вариант осуществления хирургического инструмента 500. Инструмент 500 содержит рукоятку 502, пистолетную рукоятку 501, пусковое устройство 504 и концевой зажим 505. В соответствии с различными вариантами осуществления, рукоятка 502, пусковое устройство 504 и концевой зажим 505 могут использоваться таким же образом, как различные описанные здесь рукоятки 6, пусковые устройства 18, 20 и концевые захваты 12. В дополнение к ней или взамен функциональности, которая была описана здесь выше, концевой зажим 501 может иметь, например, хирургические приспособления для рассечения, захвата, лазерного рассечения и/или коагуляции, радиоволнового рассечения и/или коагуляции, ультразвукового рассечения и/или коагуляции.
Рукоятка 502 инструмента 500 может содержать в себе по меньшей мере один батарейный блок 506. Батарейный блок 506 может содержать одну батарею или множество батарей, расположенных в ряд и/или имеющих параллельную конфигурацию. Рукоятка 502 может содержать установочный модуль для батарей 508, к которому может присоединяться батарейный блок 506. Установочный модуль для батарей 508 может иметь любое строение, обеспечивающее стыковку батарейного блока 506 к инструменту 500. Например, установочный модуль для батарей 508 может быть полостью в рукоятке 502, которая конфигурирована для вмещения по меньшей мере части батарейного блока 506, как было показано на фигуре. В других вариантах осуществления установочный модуль для батарей 508 может быть реализован при помощи множества других структур. В одном варианте осуществления установочный модуль для батарей 508 является опорой, в которую помещается батарейный блок 506. В одном варианте осуществления пистолетная рукоятка 501 содержит установочный модуль для батарей 508. В любом случае, как более подробно обсуждается ниже, установочный модуль для батарей 508 может содержать выступающую часть для взаимодействия с батарейным блоком 506 при присоединении батарейного блока 506 к рукоятке 502. После присоединения батарейный блок 506 может быть электрически соединен, после чего он может обеспечивать питание цепи 514 инструмента 500. Как было показано, цепь может быть расположена в рукоятке 502, в концевом зажиме 505 или в любой комбинации расположений внутри инструмента 500. При использовании цепь 514 может обеспечивать работу по меньшей мере одного хирургического приспособления в концевом зажиме 505. Например, цепь 514 может содержать электрический двигатель для обеспечения работы электрической фрезы, зажима или других механических приспособлений. В дополнение к нему или взамен двигателя цепь 514 может содержать подходящие детали цепи для реализации радиоволнового, ультразвукового или другого типа неприводного хирургического приспособления.
Фиг. 47A, 47B, 47C схематически изображают батарейный блок 506 и часть инструмента 500. Батарейный блок 506 может содержать разъем для разряда, который автоматически замыкает цепь внутри батарейного блока 506 при присоединении к инструменту 500. Разъем для разряда служит для медленного уменьшения заряда батарейного блока 506 через некоторое время. Например, как только батарейный блок 506 будет достаточно разряжен, он может быть утилизирован как неопасный отход. Батарейный блок 506 может содержать источник напряжения 510. В одном варианте осуществления источник напряжения 510 является литиевой батареей и содержит по меньшей мере один аккумуляторный элемент, выбранный из группы, которая содержит аккумуляторный элемент CR123 и аккумуляторный элемент CR2. Должно быть понятно, что могут использоваться любые подходящие источники напряжения. Батарейный блок 506 также содержит разъем для разряда 512, который электрически соединяется с источником напряжения 510, когда переключатель 516 закрыт. Каждый из батарейного блока 506 и инструмента 500 содержит электропроводные контакты 518, 520 соответственно, которые находятся в месте контакта при присоединении батарейного блока 506 к инструменту 500. Фиг. 47A изображает батарею в неприсоединенном положении. Переключатель 516 находится в открытом положении, и источник напряжения 510 может быть в полностью заряженном состоянии. Фиг. 47B изображает то, как батарейный блок 506 находится в присоединенном состоянии. Проводящие контакты 518 батарейного блока 506 находятся в электрической связи с контактами 520 инструмента, что позволяет батарейному блоку 506 снабжать энергией цепь 514 (Фиг. 46). В присоединенном положении переключатель 516 переходит в закрытое положение для соединения источника напряжения 510 с разъемом для разряда 512. Во время работы энергия будет поступать из источника напряжения 510 через разъем для разряда 512 в инструмент. Другими словами, разъем для разряда 512 будет разряжать заряд в источнике напряжения 510 одновременно с тем, как батарейный блок 506 будет обеспечивать рабочую мощность инструмента 500. Как более подробно обсуждается ниже, часть инструмента 500 может физически взаимодействовать с разъемом для разряда 512 во время присоединения батарейного блока 506 к инструменту 500 для перевода переключателя 516 из открытого в закрытое положение. Фиг. 47C изображает батарейный блок 506 в неприсоединенном состоянии. В одном варианте осуществления переключатель 516 остается в закрытом положении для того, чтобы разрядка источника напряжения 510 могла продолжаться даже после того, как батарейный блок 506 будет отсоединен от инструмента 500.
Фиг. 48 является графиком 600 уровня напряжения в батарейном блоке 506 в течение времени, измеренного от момента его присоединения к инструменту 500 в соответствии с одним неограничивающим вариантом осуществления. График 600 изображает уровни напряжения 6В аккумуляторного элемента батарейного блока 506. График 600 является лишь изображением одного варианта осуществления батарейного блока 506. Необходимо понимать, что если на графике 600 изображен источник питания постоянного тока 6 В, то батарейный блок 506 может обеспечивать любое подходящее напряжение, такое как, например, постоянный ток 9 В, постоянный ток 12 В или постоянный ток 18 В. Как более подробно обсуждается ниже, батарейный блок 506 может содержать множество аккумуляторных элементов, расположенных параллельно и/или рядами. График 600 содержит три примера разрядных кривых 602, 604, 606. Как показано при помощи первой разрядной кривой 602, напряжение в источнике питания 510 падает ниже 2,0 вольт через приблизительно 28 часов. Как показано при помощи второй разрядной кривой 604, напряжение в источнике питания 510 падает ниже 2,0 вольт через приблизительно 30 часов. Как показано при помощи третьей разрядной кривой 606, напряжение в источнике питания 510 падает ниже 2,0 вольт через приблизительно 33 часа. Общая форма разрядной кривой может зависеть от, например, уровня активности инструмента 500 во время хирургической манипуляции. Например, инструмент, который имеет отношение к первой разрядной кривой 602, более активно использовался во время хирургической манипуляции, чем инструмент, который имеет отношение ко второй разрядной кривой 606. В любом случае, разъем для разряда 512 поддерживает удовлетворительный уровень напряжения в батарейном блоке 506 в течение определенного периода времени, что позволяет убедиться в том, что инструмент может использоваться по назначению в ходе хирургической манипуляции. Например, в одном варианте осуществления, уровень напряжения в батарейном блоке 506 поддерживается на уровне около 6 вольт в течение приблизительно 12 часов. Через 12 часов уровень напряжения будет постепенно снижен до неопасного уровня. Необходимо понимать, что разъем для разряда 512 может калиброваться для более быстрой или более медленной разрядки источника напряжения.
В одном варианте осуществления для уменьшения уровня энергии в источнике напряжения используется резистивный элемент. Фиг. 49A является упрощенной диаграммой цепи батарейного блока 616, которая содержит разъем для разряда 612. Батарейный блок 616 может быть присоединен к инструменту 500, например, при помощи контактов 618. В этом варианте осуществления батарейный блок 616 содержит первое соединение аккумуляторных элементов 610 и второе соединение аккумуляторных элементов 611. В одном варианте осуществления первое и второе соединения аккумуляторных элементов 610, 611 являются литиевыми батареями. Каждое из первого и второго соединения аккумуляторных элементов 610, 611 может иметь множество отдельных аккумуляторных элементов 610a, 610b, 611a, 611b, расположенных параллельно. Например, каждое из первого и второго соединения аккумуляторных элементов 610, 611 могут быть источниками постоянного тока 6 В, которые соединены последовательно для создания постоянного тока 12 В на контактах 618 батарейного блока 616, когда он полностью заряжен. Однако аккумуляторные элементы 610a, 610b, 611a, 611b могут быть электрически соединены друг с другом последовательно, параллельно или в виде любой комбинации этих соединений.
В одном варианте осуществления разъем для разряда 612 содержит первый резистивный элемент 622 и второй резистивный элемент 624. Должно быть понятно, что в некоторых вариантах осуществления батарейный блок 616 может содержать, например, множество разъемов для разряда 612, каждый из которых имеет более или менее двух резистивных элементов или других деталей цепи. В изображенном варианте осуществления первый резистивный элемент 622 соединен через первый анод 626 и первый катод 628 с первым соединением аккумуляторных элементов 610 при помощи первого переключателя 630. Первый резистивный элемент 624 может быть соединен через второй анод 632 и второй катод 634 со вторым соединением аккумуляторных элементов 611 при помощи второго переключателя 636. Первый и второй выключатели 630, 636 могут быть закрыты при присоединении батарейного блока 616 к хирургическому инструменту 500 для разрядки первого и второго соединения аккумуляторных элементов 610, 611.
Характеристики резистивных элементов, используемых вместе с разъемом для разряда 612, могут сильно варьироваться в зависимости от реализации. В одном варианте осуществления первый резистивный элемент 622 имеет сопротивление в диапазоне от около 90 Ом до около 110 Ом. В одном варианте осуществления первый резистивный элемент 622 имеет сопротивление в диапазоне от около 97 Ом до около 104 Ом. В одном варианте осуществления резистивный элемент 622 имеет сопротивление 102,9 Ом и номинальную мощность 1 Ватт. Определение необходимого сопротивления основывается по меньшей мере частично на емкости источника напряжения, уровне напряжения в источнике напряжения и желаемой продолжительности во времени кривой разрядки. Например, в одном варианте осуществления емкость аккумулятора первого соединения аккумуляторных элементов 610 составляет 1400 мАч, уровень напряжения составляет 6 В постоянного тока, и желаемое время разрядки составляет 24 часа. Деление 1400 мАч на 24 часа дает ток 0,0582 A. По закону Ома деление 6 В на 0,582A дает сопротивление 102,9 Ом. С силой тока 0,583 А и сопротивлением 102,9 Ом, мощность, рассеиваемая этим резистором, составляет 0,350 Вт. Должно быть понятно, что различные уровни напряжения, аккумуляторные емкости и желаемое время разрядки приводят к различным значениям сопротивления.
Фиг. 49B является упрощенной диаграммой цепи еще одного варианта осуществления батарейного блока. На Фиг. 49B батарейный блок 660, присоединяемый к хирургическому инструменту 650, имеет несколько наборов контактов. Как показано, хирургический инструмент 650 имеет первый набор контактов 652A, 652B и второй набор контактов 654A, 654B. Батарейный блок 660 имеет первый набор контактов 656A, 656B и второй набор контактов 658A, 658B, которые конфигурированы для соединения с контактами хирургического инструмента 650. В изображенном варианте осуществления батарейный блок 660 содержит первый аккумуляторный элемент 662 с последовательно подключенным вторым аккумуляторным элементом 664, которые снабжают энергией хирургический инструмент 650 посредством первого набора контактов 652A, 652B. Батарейный блок 660 также может иметь третий аккумуляторный элемент 668 с последовательно подключенным четвертым аккумуляторным элементом 670, которые снабжают энергией хирургический инструмент 650 посредством второго набора контактов 654A, 654B. Каждый из первого, второго, третьего и четвертого аккумуляторного элемента 662, 664, 668, 670 может обеспечивать любой подходящий уровень напряжения при полном заряде, например, такой, как 3 В постоянного тока или 6 В постоянного тока. В одном варианте осуществления батарейный блок 660 в целом подает около 12 В постоянного тока на хирургический инструмент 650 при полном заряде батареи (например, около 6 В постоянного тока из первого набора контактов 656A, 656B и около 6 В постоянного тока из второго набора контактов 658A, 658B). Батарейный блок 660 может содержать первый разъем для разряда 672 и второй разъем для разряда 674. Поскольку первый разъем для разряда 672 и второй разъем для разряда 674 схематически изображены по отдельности на Фиг. 49A, должно быть понятно, что разъемы для разряда 672 и 674 могут быть реализованы на отдельной монтажной плате или в виде любого другого варианта осуществления. Первый разъем для разряда 672 содержит первый резистивный элемент 674, который последовательно соединен с первым и вторым аккумуляторными элементами 662, 664 и первым переключателем 680. Второй разъем для разряда 674 содержит второй резистивный элемент 682, который последовательно соединен с третьим и четвертым аккумуляторными элементами 668, 670 и вторым переключателем 684. Первый и второй переключатели 680, 684 изображены в открытом положении. Когда первый переключатель 680 закрыт (например, во время присоединения батарейного блока 660 к хирургическому инструменту 650), ток подается из первого и второго аккумуляторных элементов 662, 664 через первый резистивный элемент 678 для разрядки этих аккумуляторных элементов. Аналогичным образом, когда второй переключатель 684 закрыт (например, во время присоединения батарейного блока 660 к хирургическому инструменту 650), ток подается из третьего и четвертого аккумуляторных элементов 668, 670 через первый резистивный элемент 678 для разрядки этих аккумуляторных элементов.
Фиг. 50 является упрощенной диаграммой цепи батарейного блока 716, содержащего первый разъем для разряда 712 и второй разъем для разряда 713. Батарейный блок 716 может быть присоединен к инструменту 500, например, при помощи своих контактов 718. В этом варианте осуществления батарейный блок 716 содержит первое соединение аккумуляторных элементов 710, второе соединение аккумуляторных элементов 711 и третий аккумуляторный элемент 714. Первый разъем для разряда 712 содержит первый резистивный элемент 722 и второй резистивный элемент 724. Второй разъем для разряда 713 содержит третий резистивный элемент 726. Резистивные элементы 722, 724, 726 соединены с соответствующими аккумуляторными элементами посредством переключателей 730, 736 и 738. Переключатели 730, 736 и 738 должны быть закрыты после присоединения батарейного блока 716 к хирургическому инструменту 500 для разрядки первого и второго соединения аккумуляторных элементов 610, 611 и третьего аккумуляторного элемента 716. Сопротивление третьего резистивного элемента 726 может быть схожим или отличным от сопротивления первого и второго резистивных элементов 722, 724. Как описано выше, сопротивление третьего резистивного элемента 726 может быть по меньшей мере частично зависеть от напряжения в третьем аккумуляторном элементе 714 и желаемых характеристик кривой разряда.
Фиг. 51-53 являются видами в перспективе батарейного блока 800, осуществляющего схему батарейного блока 616, который изображен на Фиг. 49.Батарейный блок 800 может содержать корпус 802, ограничивающий внутреннюю полость 810. Поскольку внутренняя полость 810 изображена в центральной части корпуса 802, должно быть понятно, что внутренняя полость 810 может находиться в любом подходящем месте. Корпус 802 может покрываться крышкой 804, которая поможет быть закреплена на корпусе 802 при помощи одной или более механической защелки 806, 808. Фиг. 52 изображает один вариант осуществления батарейного блока 800 с крышкой 804, которая была удалена для отображения множества аккумуляторных элементов 812 внутри этого блока. Может использоваться любое подходящее количество и/или тип аккумуляторных элементов 812. Например, могут использоваться аккумуляторные элементы CR123 и/или CR2. Фиг. 53 изображает один вариант осуществления батарейного блока 800 с частью корпуса 802, которая была удалена для лучшего отображения аккумуляторных элементов 812.
Фиг. 54A и 54B изображают виды поперечного сечения одного варианта осуществления батарейного блока 800, который содержит переносной разъем для разряда 812. Разъем для разряда 812 может быть помещен внутри внутренней полости 810 и может перемещаться внутри внутренней полости 810 в направлениях, на которые указывает стрелка 815. Фиг. 54A изображает разъем для разряда 812 в открытом положении, и Фиг. 54B изображает разъем для разряда 812 в закрытом положении. Разъем для разряда 812 может содержать по меньшей мере два контакта 816, 818. Когда разъем для разряда 812 находится в открытом положении, часть контактов 816, 818 может соприкасаться с непроводящей частью корпуса 802, такой как контактные пальцы 820, 822. В соответствии с различными вариантами осуществления контакты 816, 818 могут прикладывать силу к контактным пальцам 820, 822 для сопротивления движению разъема для разряда 812 в направлении стрелок 815. Кроме того, в некоторых вариантах осуществления, контактные пальцы 820, 822 могут представлять собой выступы или области понижения напряжения, как показано на Фиг. 54A и 54B. Батарейный блок 800 может также содержать один или более электрод, такой как первый электрод 824 и второй электрод 826. Каждый из первого и второго электродов 824 и 826 может электрически соединяться с катодом или анодом аккумуляторных элементов, которые содержатся в батарейном блоке 800. В закрытом положении (Фиг. 54B) контакты 816, 818 электрически связаны с электродами 824, 826, что позволяет источнику напряжения разряжаться при помощи разъема для разряда 812. Как более подробно обсуждается ниже, разъем для разряда 812 может переводиться из открытого положения в закрытое положение после присоединения батарейного блока 800 к хирургическому инструменту.
Фиг. 55 является видом в перспективе разъема для разряда 812 в соответствии с одним неограничивающим вариантом осуществления. Контакты 816, 818 разъема для разряда 812 могут быть соединены с основной частью 830 разъема для разряда 812. Аналогичным образом контакты 836, 838 разъема для разряда 812 могут быть соединены с основной частью 830 разъема для разряда 812. В соответствии с различными вариантами осуществления, контакты 816, 818 могут быть электрически соединены друг с другом при помощи резистивного элемента (не показан), прикрепленного к монтажной плате 832. Аналогичным образом контакты 836, 838 могут быть электрически соединены друг с другом при помощи резистивного элемента (не показан), прикрепленного к монтажной плате 832. Как было показано, контакты 816, 818, 836, 838 могут иметь изгиб или кривизну, которые позволяют контактам перемещаться кнаружи, когда они сжаты внутри. Кроме того, в одном варианте осуществления дистальный конец каждого из контактов 816, 818, 836, 838 может иметь часть, которая направлена внутрь. Основная часть 830 может иметь контактирующую поверхность 840, которая сцепляется с инструментом, когда батарейный блок 800 присоединен к инструменту. Посредством этого сцепления разъем для разряда 812 может перемещаться относительно корпуса 800.
Фиг. 56 изображает батарейный блок 800, присоединенный к установочному модулю для батарей 850. Для ясности различные компоненты были удалены. Снова возвращаясь к Фиг. 54A, 54B, 55 и 56, установочный модуль для батарей 850 содержит выступающую часть 858, которая имеет такой размер, чтобы она могла помещаться в полости 810 (Фиг. 51) батарейного блока 800. Перед соединением разъем для разряда 812 находится в открытом положении (Фиг. 54A). Во время присоединения батарейного блока 800 к установочному модулю для батарей 850 выступающая часть 858 вставляется в полость 810, и батарейный блок 800 перемещается относительно установочного модуля для батарей 850 в направлении, указанном стрелкой 862. В конечном счете дистальный конец 860 выступающей части 858 контактирует с контактирующей поверхностью 840 разъема для разряда 812. Если пользователь продолжает присоединение батарейного блока 800, то разъем для разряда 812 перемещается относительно корпуса 802 в направлении, указанном стрелкой 864, и переходит в закрытое положение (Фиг. 54B). В этом положении батарейный блок 800 начинает медленно разряжаться. Когда батарейный блок 800 удаляется из установочного модуля для батарей 850, разъем для разряда 812 может оставаться в положении, показанном на Фиг. 54B. Поэтому аккумуляторные элементы (не показаны) батарейного блока 800 могут терять любой оставшийся заряд при помощи резистивных элементов или перед, или во время утилизации.
Должно быть понятно, что переносной разъем для разряда батарейного блока не ограничивается осуществлениями, изображенными на Фиг. 56. Например, Фиг. 57A и 57B изображают батарейный блок 900 и разъем для разряда 912 с различными компонентами, которые были удалены для ясности. Разъем для разряда 912 перемещается между открытым положением (Фиг. 57A) и закрытым положением (Фиг. 57B). В открытом положении контакты 916, 918 сцепляются с непроводящими частями корпуса 920, 922 соответственно. Разъем для разряда 912 может двигаться по траектории 914 при перемещении между открытым положением и закрытым положением. Фиг. 57B изображает батарейный блок 900 в закрытом положении после того, как толкатель 958 переместил разъем для разряда 912 в направлении, которое указано стрелкой 964. Например, толкатель 958 может быть частью установочного модуля для батарей хирургического инструмента. В одном варианте осуществления установочный модуль для батарей содержит полость, размеры которой позволяют вместить батарейный блок 900, и толкатель 958 расположен внутри этой полости. В закрытом положении контакты 916, 918 электрически соединяются с электродами 924, 926. Разъем для разряда 912 может содержать плату с печатным монтажом 932, к которой прикреплен по меньшей мере один резистивный элемент при помощи, например, поверхностного монтажа или соединения через сквозные отверстия.
Фиг. 58A и 58B изображают батарейный блок 1000 в соответствии с другим неограничивающим вариантом осуществления. Различные компоненты были опущены для ясности. Батарейный блок 1000 содержит разъем для разряда 1012, который перемещается между открытым положением (Фиг. 58A) и закрытым положением (Фиг. 58B). Батарейный блок 1000 может содержать первый электрод 1024 с контактом 1025 и второй электрод 1026 с контактом 1027.Электроды 1024, 1026 могут контактировать с аккумуляторными элементами (не показаны) батарейного блока 1000. В открытом положении контакты 1016, 1018 разъема для разряда 1012 не соединены с контактами 1025, 1027 электродов 1024, 1026. Разъем для разряда 1012 может двигаться по траектории 1014 при перемещении между открытым положением и закрытым положением. Фиг. 58B изображает батарейный блок 1000 в закрытом положении после того, как толкатель 1058 переместил разъем для разряда 1012 в направлении, которое указано стрелкой 1064. Например, толкатель 1058 может быть частью установочного модуля для батарей хирургического инструмента. В закрытом положении контакты 1016, 1018 электрически соединяются с контактами 1025, 1027 электродов 1024, 1026. Разъем для разряда 1012 может содержать плату с печатным монтажом 1032, к которой прикреплен по меньшей мере один резистивный элемент. В некоторых вариантах осуществления контакты 1016, 1018 сами могут содержать резистивные элементы. По сути резистивные элементы могут быть элементами с любым подходящим значением сопротивления и любой подходящей механической конфигурацией.
Фиг. 59 является видом в перспективе батарейного блока 1100. Фиг. 60A и 60B изображают виды изнутри батарейного блока 1100 во время различных режимов работы с различными компонентами, которые были удалены для ясности. Батарейный блок 1100 имеет один аккумуляторный элемент 1102 и внешний корпус 1104, который ограничивает полость 1110. Внешний корпус 1104 может быть непроводящим и иметь проводящие контакты для обеспечения питания цепи хирургического инструмента, когда батарейный блок 1100 присоединен к хирургическому инструменту. В одном варианте осуществления батарейный блок 1100 помещается в полости в пистолетной рукоятке, которая является частью хирургического инструмента. Батарейный блок 1100 содержит разъем для разряда 1112, который перемещается между открытым положением (Фиг. 60A) и закрытым положением (Фиг. 60B). В одном варианте осуществления разъем для разряда 1112 имеет первый и второй контакты 1116, 1118 которые соединены с монтажной платой 1132. Монтажная плата 1132 может содержать, например, по меньшей мере один резистивный элемент. В некоторых вариантах осуществления монтажная плата 1132 содержит дополнительную цепь. Батарейный блок 1100 содержит первый электрод 1124, соединенный с анодом аккумуляторного элемента 1102, и второй электрод, соединенный с катодом аккумуляторного элемента 1102. Перед присоединением батарейного блока 1100 к инструменту разъем для разряда 1112 находится в открытом положении (Фиг. 60A). В изображенном варианте осуществления первый контакт 1116 электрически соединен с первым электродом 1124, и второй контакт 1118 находится в состоянии покоя или наоборот соединен с непроводящим пальцевым контактом 1120. При присоединении батарейного блока 1100 к инструменту выступающая часть 1158 инструмента должна помещаться в полость 1110 и контактировать с разъемом для разряда 1112 для перемещения разъема для разряда 1112 в направлении, которое указано стрелкой 1164. В закрытом положении (Фиг. 60B) первый контакт 1116 электрически соединяется с первым электродом 1124, и второй контакт 1118 электрически соединяется со вторым электродом 1126. В этом положении образуется замкнутая цепь, которая позволяет аккумуляторному элементу 1102 разряжать энергию при помощи разъема для разряда 1112.
Дополнительная подробная информация относительно хирургических инструментов и батарейных блоков приведена в заявке на патент США Сер. № 12/884838 под названием "SURGICAL INSTRUMENTS AND BATTERIES FOR SURGICAL“ INSTRUMENTS", которая была подана 17 сентября 2010 года и включена в настоящий документ в виде ссылки во всей своей полноте.
Должно быть понятно, что по меньшей мере некоторые приведенные здесь фигуры и описания были упрощены для изображения элементов, которые имеют значение для четкого понимания сущности изобретения, в то время как для ясности были удалены другие элементы. Однако специалистам в данной области будет понятно, что эти и другие элементы могут быть желательными. Тем не менее, поскольку такие элементы хорошо известны в данной области техники и они не влияют на лучшее понимание сущности изобретения, здесь не приведено обсуждение этих элементов.
Хотя были описаны некоторые модификации изобретения, тем не менее, должно быть очевидно, что различные модификации, изменения и адаптации этих вариантов осуществления могут проводиться специалистами в данной области техники с достижением некоторых или всех преимуществ сущности настоящего изобретения. Например, в соответствии с различными вариантами осуществления один компонент может быть заменен множеством компонентов, а множество компонентов могут быть заменены одним компонентом для выполнения заданной функции или функций. Поэтому данная заявка предназначена для охвата всех таких модификаций, изменений и адаптаций без отступления от сущности и объема описываемого изобретения, которое определено в формуле изобретения.
Любой патент, публикация или другая информация, которые полностью или частично включены в данный документ посредством ссылки, являются составной частью данного документа в той степени, в которой они не противоречат определениям, положениям и другой информации, представленной в настоящем документе. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям данного документа, которая была включена в указанный документ посредством ссылки. Любой материал или его часть, которая включена в настоящий документ посредством ссылки и которая противоречит указанным определениям, положениям или другой информации, представленной в настоящем документе, включается в данный документ в той мере, в которой между включенным посредством ссылки материалом и настоящим документом не возникает противоречий.
Реферат
Использование: в батарейных блоках для обеспечения питания хирургических инструментов. Технический результат - обеспечение приемлемого для утилизации уровня напряжения в батарейном блоке. Батарейные блоки могут содержать множество аккумуляторных элементов и содержать перемещаемый разъем для разряда. При присоединении к хирургическому инструменту разъем для разряда может электрически соединять анод батарейного блока с катодом батарейного блока, например, при помощи резистивного элемента для разрядки батарейного блока. 3 н. и 17 з.п.ф-лы, 72 ил.
Формула
концевой зажим;
рукоятку, непосредственно соединенную с концевым зажимом, где рукоятка содержит пусковое устройство для приведения в действие концевого зажима, причем рукоятка содержит установочный модуль для батареи;
установочный модуль для батареи, содержащий выступающую часть;
батарейный блок, присоединяемый к установочному модулю для батареи, где батарейный блок находится в электрическом контакте с по меньшей мере одной рукояткой и концевым зажимом при присоединении к установочному модулю для батареи, и где батарейный блок содержит:
корпус; и
первый анод и первый катод, находящиеся внутри корпуса; и
перемещаемый разъем для разряда, где, после присоединения батарейного блока к установочному модулю для батареи, выступающая часть контактирует с разъемом для разряда, причем относительно корпуса разъем для разряда образует электрическую связь между первым анодом батарейного блока и первым катодом батареи.
хирургический инструмент, содержащий аккумуляторное отделение;
выступающую часть, расположенную в непосредственной близости к аккумуляторному отделению; и
батарейный блок, причем батарейный блок содержит:
корпус;
множество аккумуляторных элементов, находящихся внутри корпуса, причем по меньшей мере часть этого множества аккумуляторных элементов электрически не связана друг с другом;
разрядное устройство, имеющее открытое положение и закрытое положение, причем в закрытом положении разрядное устройство электрически соединяет анод батарейного блока с катодом батарейного блока, причем разрядное устройство механически смещается в сторону закрытого положения, причем разрядное устройство удерживается в открытом положении непроводящей частью корпуса, и где разрядное устройство переводится в закрытое положение при помощи выступающей части после присоединения батарейного блока к аккумуляторному отделению хирургического инструмента.
хирургическое устройство, содержащее установочный модуль для батареи;
батарейный блок, причем батарейный блок содержит:
первое и второе соединения аккумуляторных элементов;
перемещаемый разъем для разряда, находящийся в непосредственной близости к первому и второму соединениям аккумуляторных элементов; причем перемещаемый разъем для разряда включает первый и второй наборы контактов; где в первом положении первый и второй наборы контактов электрически не соединены с первым и вторым соединениями аккумуляторных элементов; и где во втором положении первый набор контактов электрически соединен с первым соединением аккумуляторных элементов, и второй набор контактов электрически соединен со вторым соединением аккумуляторных элементов; где перемещаемый разъем для разряда переходит из первого положения во второе положение после присоединения батарейного блока к установочному модулю для батареи.
Комментарии