Минимально инвазивный способ и устройство для стабилизации позвоночного столба - RU2601986C2
Код документа: RU2601986C2
Чертежи





Описание
Данная заявка заявляет приоритет в отношении предварительных заявок США под номерами: 61/570535, поданной 14 декабря 2011 года под названием «Минимально инвазивная система и способ стабилизации позвоночного столба»; 61/588823, поданной 20 января 2012 года под названием «Одноразовый набор для малоинвазивного хирургического вмешательства на позвоночнике»; 61/614596, поданной 23 марта 2012 года под названием «Конструкция для стабилизации позвоночного столба»; 61/614863, поданной 23 марта 2012 года под названием «Автоматический инструмент и набор для хирургического вмешательства на позвоночнике» и 61/735327, поданной 10 декабря 2012 года под названием «Имплантаты для стабилизации позвоночного столба». Все из указанных выше родственных заявок включены в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится по существу к корректирующим спинальным процедурам и имплантатам; и более конкретно, к минимально инвазивному способу, имплантату и системе инструментов для стабилизации позвоночного столба.
УРОВЕНЬ ТЕХНИКИ
Артродез позвонков представляет собой хирургическую технику, при которой один или больше позвонков соединяют, чтобы уменьшить движение между позвонками. Артродез применяют для лечения ряда состояний позвоночника, в том числе деформаций позвоночника, стеноза позвоночного канала и спондилолистеза. В целях обеспечения максимальной вероятности успешного артродеза, инструментарий часто используется в качестве внутренней шины для стабилизации позвоночника и помощи в лечении костей. В упомянутых системах инструментов обычно используют винт, который вставляется в ножки позвонков и действует как анкер. Указанные анкеры затем спаривают со стержнями для стабилизации каждой стороны позвоночного столба. Многие системы транспедикулярных винтов являются сложными, использующими ряд инструментов для закрепления винтов и фиксации стержней на месте. Система инструментов и описанный здесь способ минимизирует эту сложность, уменьшая время работы для конечного пользователя.
Предыдущие варианты реализации этого типа имплантата использовали конструкцию тюльпанообразной головки, прикрепленной к винту. В этих вариантах осуществления стабилизирующий стержень вставляют в тюльпанообразную головку и закрепляют на месте запорным колпачком. Эти варианты реализации с тюльпанообразной головкой и винтом обычно включают полиаксиальное движение, обеспечивая гибкость, позволяющую хирургу сгибать стержень в соответствии с анатомией позвоночника конкретного пациента.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение предоставляет уникальный и новый способ, имплантат и инструменты для стабилизации позвоночного столба. В одном аспекте имплантат по настоящему изобретению включает в себя транспедикулярный винт, фиксатор и удлиненный элемент. В этом аспекте могут быть разработаны способы, имплантаты и инструментарий по настоящему изобретению для предоставления пользователю возможности установки имплантата в виде одной детали.
В одном варианте реализации настоящего изобретения имплантат для стабилизации позвоночного столба содержит транспедикулярный винт с головкой транспедикулярного винта на его проксимальном конце. Удлиненный элемент жестко соединен с головкой транспедикулярного винта и проходит проксимально от нее, в сторону от транспедикулярного винта. Удлиненный элемент имеет наружную резьбу на протяжении по меньшей мере части его продольной периферии. Также включен фиксатор, имеющий внутренний проход без резьбы с возможностью обеспечения свободного скольжения фиксатора по удлиненному элементу. Фиксатор имеет сквозное отверстие для получения стержня, используемого для фиксирования одного имплантата к другому. Наконец, стопорная гайка, имеющая внутренний проход с резьбой, входит в зацепление с наружной резьбой удлиненного элемента. Продольное передвижение стопорной гайки по резьбе дистально вдоль удлиненного элемента к фиксатору, закрепляет и удерживает стержень между фиксатором и головкой транспедикулярного винта с возможностью обеспечения фиксации одного имплантата с другим.
Отверстие через фиксатор может быть сконфигурировано с возможностью формирования паза для получения стержня, используемого для фиксации одного имплантата к другому. Паз может быть выровнен продольно внутри фиксатора, по существу перпендикулярно к продольной оси имплантата, при этом паз находится на
одной стороне удлиненного элемента и в непосредственной близости от него. В другом варианте реализации фиксатор может включать в себя два диаметрально противоположных сквозных отверстия, при этом два отверстия образуют два диаметрально противоположных паза, каждый паз, предназначен для введения в него одного стержня, используемого для фиксации одного имплантата с другим. Два паза обеспечивают закрепление и удержание двух частей стержня между фиксатором и головкой транспедикулярного винта. В этом другом варианте реализации каждый паз может быть также выровнен продольно и по существу перпендикулярно продольной оси имплантата, при этом каждый паз находится на диаметрально противоположной стороне и в непосредственной близости от удлиненного элемента.
В дополнительном варианте реализации удлиненный элемент включает раскрывающий разъединитель с возможностью обеспечения сдвига продольной части удлиненного элемента при заданной крутящей силе. Раскрывающий разъединитель может представлять собой выемку, отверстие или сквозное отверстие в удлиненном элементе. Раскрывающий разъединитель может быть расположен на удлиненном элементе с возможностью по существу выравнивать раскрывающий разъединитель с проксимальным концом стопорной гайки после того, как стопорная гайка передвинулась к фиксатору с возможностью закрепления и удержания стержня между фиксатором и головкой транспедикулярного винта.
В альтернативном варианте осуществления удлиненный элемент может включать резьбу обратного винта внутри углубления в проксимальном конце транспедикулярного винта или в дистальном конце удлиненного элемента. Дистальный конец удлиненного элемента или проксимальный конец транспедикулярного винта имеет резьбу, входящую в зацепление с соответствующим углублением. Тем самым резьба обратного винта позволяет приводному инструменту стопорной гайки предоставить встречное вращение имплантату с возможностью затянуть стопорную гайку относительно головки транспедикулярного винта, не продвигая транспедикулярный винт дальше в позвонок.
В другом варианте реализации стопорная гайка включает углубление для получения дистального конца стопорного штифта во время введения имплантата. Стопорный штифт может быть расположен продольно внутри приводного инструмента и рядом с удлиненным элементомс возможностью предотвращения вращения стопорной гайки на удлиненном элементе и относительно него. Это предотвращает преждевременное затягивание стопорной гайки относительно фиксатора, когда приводной инструмент
входит в зацепление с имплантатом, чтобы передать вращение имплантату для продвижения транспедикулярного винта в позвонок.
Дополнительные варианты реализации настоящего изобретения обеспечивают полиаксиальное движение между удлиненным элементом и транспедикулярным винтом. Это может быть достигнуто путем предоставления на дистальном конце удлиненного элемента или на проксимальном конце транспедикулярного винта шара шарнирного соединения с соответствующим противостоящим шарнирным соединением. Шар шарнирного соединения и соединение обеспечивает шарнирное сочленение удлиненного элемента внутри головки транспедикулярного винта. Дополнительные варианты реализации могут также включать фиксаторы, состоящие из двух частей (верхней и нижней части фиксатора). Верхняя и нижняя части фиксатора могут фиксировать и закреплять между ними один или два стержня. Вариант реализации с двумя стержнями может вместо этого представлять собой цельный, U-образный стержень. U-образный стержень обеспечивает лучшую биомеханическую балансировку всей конструкции.
Соответственно, в одном варианте реализации имплантат для стабилизации позвоночного столба включает транспедикулярный винт, и удлиненный элемент, и фиксатор, имеющий верхнюю и нижнюю часть фиксатора. Удлиненный элемент полиаксиально подвижно соединен с транспедикулярным винтом и имеет наружную резьбу на протяжении по меньшей мере части его продольной периферии. Верхняя часть фиксатора и нижняя часть фиксатора каждая имеет вогнутое отверстие, проходящее через нее с возможностью введения в него стержня, используемого для фиксации одного имплантата к другому. Верхняя часть фиксатора может иметь внутреннюю резьбу для вхождения в зацепление с наружной резьбой удлиненного элемента, чтобы передвигать удлиненный элемент по резьбе в продольном направлении посредством вращения удлиненного элемента вокруг его продольной оси. Верхняя часть фиксатора в силу этого передвигается к нижней части фиксатора с возможностью закрепления и удержания стержня между верхней частью фиксатора и нижней частью фиксатора с возможностью обеспечения фиксации одного имплантата с другим.
В другом варианте реализации удлиненный элемент включает раскрывающий разъединитель с возможностью обеспечения сдвига продольной части удлиненного элемента при заданной крутящей силе. Раскрывающий разъединитель может снова представлять собой выемку, отверстие или сквозное отверстие в удлиненном элементе. Раскрывающий разъединитель также может быть расположен на удлиненном элементе с
возможностью по существу выравнивать раскрывающий разъединитель с проксимальным концом верхней части фиксатора после того, как верхняя часть фиксатора передвинется к нижней части фиксатора для закрепления и удержания между ними стержня.
В дополнительном варианте реализации удлиненный элемент включает шар шарнирного соединения, жестко закрепленный на его дистальном конце. Шар шарнирного соединения постоянно находится в вогнутом углублении головки транспедикулярного винта, обеспечивая посредством этого полиаксиальное подвижное соединение между удлиненным элементом и транспедикулярным винтом. Шар шарнирного соединения может быть подвижно закреплен в вогнутом углублении головки транспедикулярного винта при помощи головки поворотного соединителя, присоединенной с помощью резьбового соединения, сварной и/или прессовой посадки к головке транспедикулярного винта. Это обеспечивает полиаксиальное подвижное соединение между удлиненным элементом и транспедикулярным винтом. При наличии резьбы, внутренняя резьба головки поворотного соединителя может входить в зацепление с наружной резьбой головки транспедикулярного винта.
В еще другом варианте реализации вогнутые отверстия через верхнюю и нижнюю части фиксатора могут формировать паз для введения в него стержня, используемого для фиксации одного имплантата к другому. Паз может быть выровнен продольно, по существу перпендикулярно продольной оси имплантата, и паз может находиться на одной стороне и в непосредственной близости от удлиненного элемента. В качестве альтернативы верхняя и нижняя части фиксатора, каждая имеет два диаметрально противоположных сквозных вогнутых отверстияс возможностью формирования двух диаметрально противоположных паза, при этом каждый паз сконфигурирован с возможностью введения в него стержня, используемого для фиксации одного имплантата с другим. Два паза обеспечивают закрепление и удержание двух частей стержня между верхней и нижней частями фиксатора. При предоставлении двух пазов для двух стержней (или двух частей стержня), каждый паз может быть выровнен продольно по существу перпендикулярно продольной оси имплантата, при этом каждый паз находится на диаметрально противоположной стороне и в непосредственной близости от удлиненного элемента.
При предоставлении двух пазов вместе в верхней и нижней частях двух стержней (или двух частей стержня), две части стержня (на имплантате) вместо этого будут одним U-образным стержнем. Один U-образный стержень может проходить вдоль множества
имплантатов, при этом каждый имплантат закрепляет и удерживает две соседние части U-образного стержня. Один U-образный стержень может иметь U-образный изгиб, расположенный на соответствующем конце множества имплантатов.
В еще дополнительном варианте реализации имплантат также включает удерживающий штифт. Удерживающий штифт может входить в резьбовое зацепление с нижней частью фиксатора, проходящей проксимально и продольно параллельно удлиненному элементу. Удерживающий штифт может проходить через сквозное отверстие в верхней части фиксатора.
В другом варианте реализации нижняя часть фиксатора может включать внутренний проход без резьбы выполненный с возможностью обеспечения свободного скольжения нижней части фиксатора по удлиненному элементу. Обратная сторона нижней части фиксатора может быть вогнутой с возможностью обеспечения зацепления и уплотнения относительно имеющей подходящую для зацепления форму головки транспедикулярного винта при сведении, при передвижении верхней части фиксатора в направлении нижней части фиксатора с возможностью закрепления и удержания стержня между ними.
КРАТКОЕ ОПИСАНИЕ ПРОИЛЛЮСТРИРОВАНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ
Настоящее изобретение будут лучше понято со ссылкой на следующее далее описание в сочетании с чертежами. С целью иллюстрации, на чертежах показаны определенные варианты реализации настоящего изобретения. Аналогичные цифры на чертежах везде указывают на аналогичные элементы. Следует понимать, однако, что изобретение не ограничивается показанными точными компоновками, размерами и инструментами:
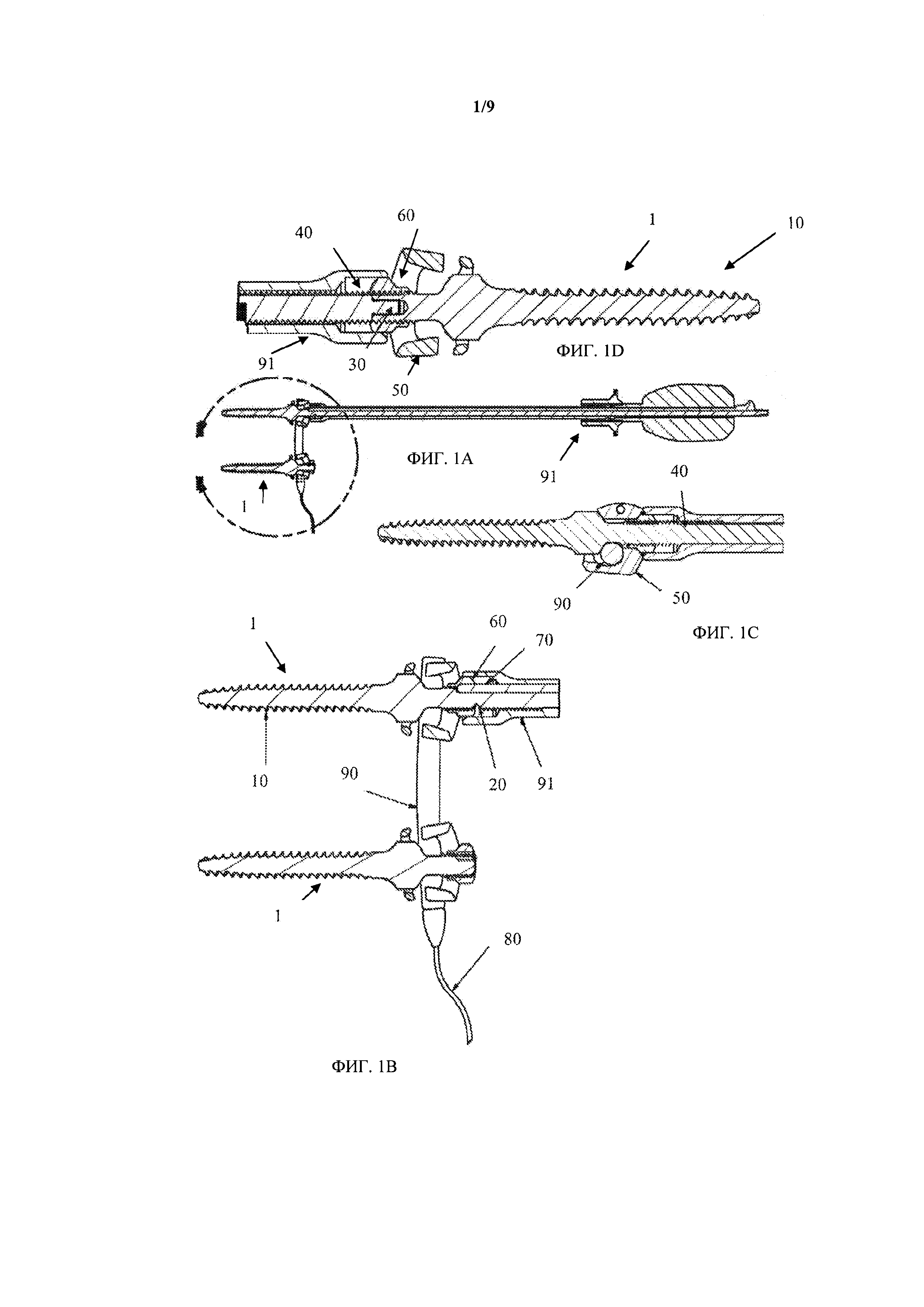
На ФИГ. 1A-1D проиллюстрированы в поперечном сечении имплантат и система для стабилизации позвоночного столба в соответствии с одним вариантом реализации настоящего изобретения;
На ФИГ. 2А-2С проиллюстрированы (на ФИГ. 2А в покомпонентном изображении) инструменты для использования при выполнении способов стабилизации позвоночного столба в соответствии с аспектами настоящего изобретения;
На ФИГ. 3 проиллюстрирован в поперечном сечении имплантат для стабилизации позвоночного столба в соответствии с другим вариантом реализации настоящего изобретения;
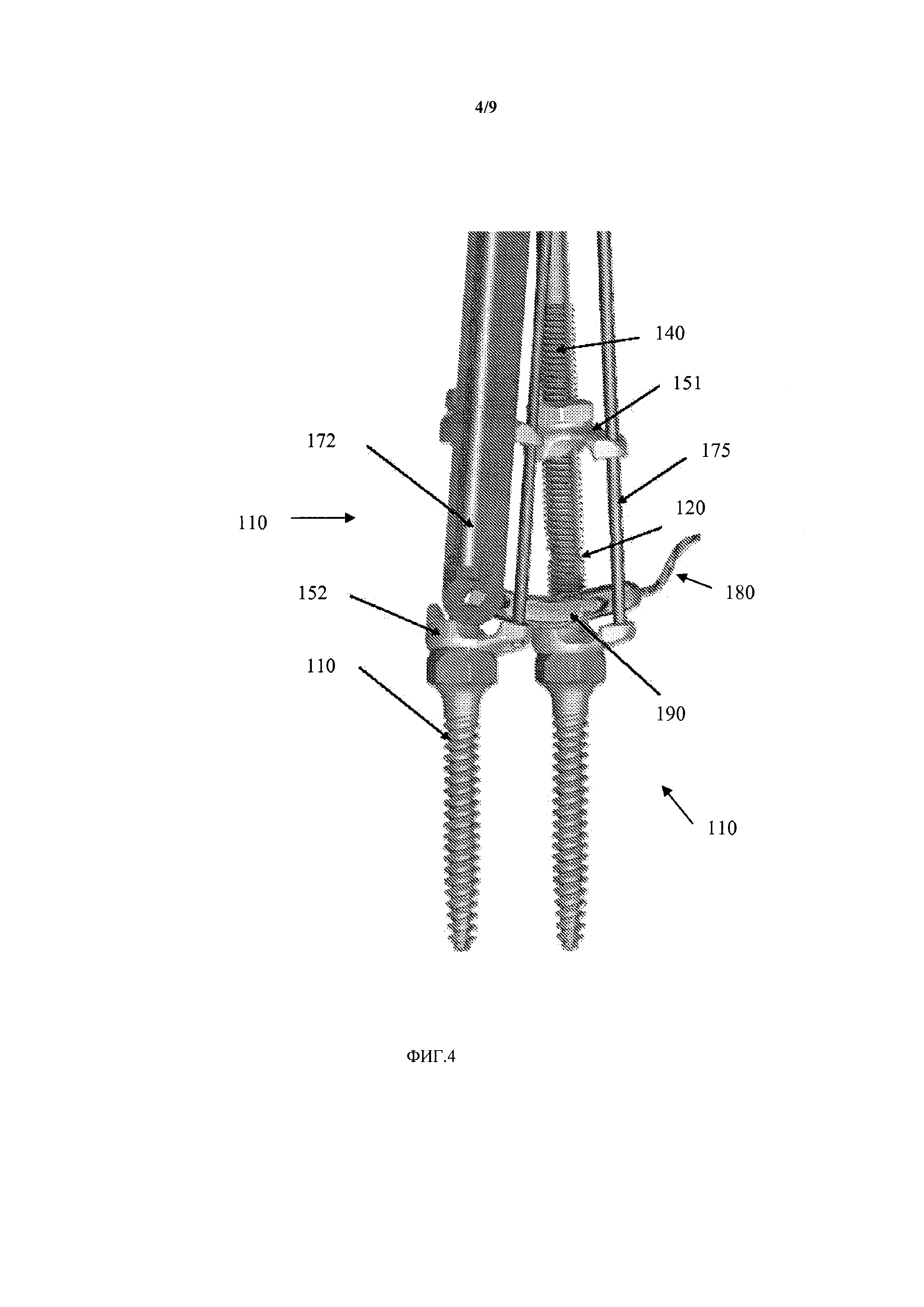
На ФИГ. 4 проиллюстрирован вид в перспективе системы для стабилизации позвоночного столба в соответствии с другим вариантом реализации настоящего изобретения, системы, включающей два имплантата по настоящему изобретению со стабилизирующим стержнем, вставленным между ними;
На ФИГ. 5 проиллюстрирован альтернативный вид в перспективе системы для стабилизации позвоночного столба, продемонстрированной на ФИГ. 4, системы, включающей два имплантата по настоящему изобретению после введения со стабилизирующим стержнем, закрепленным между ними;
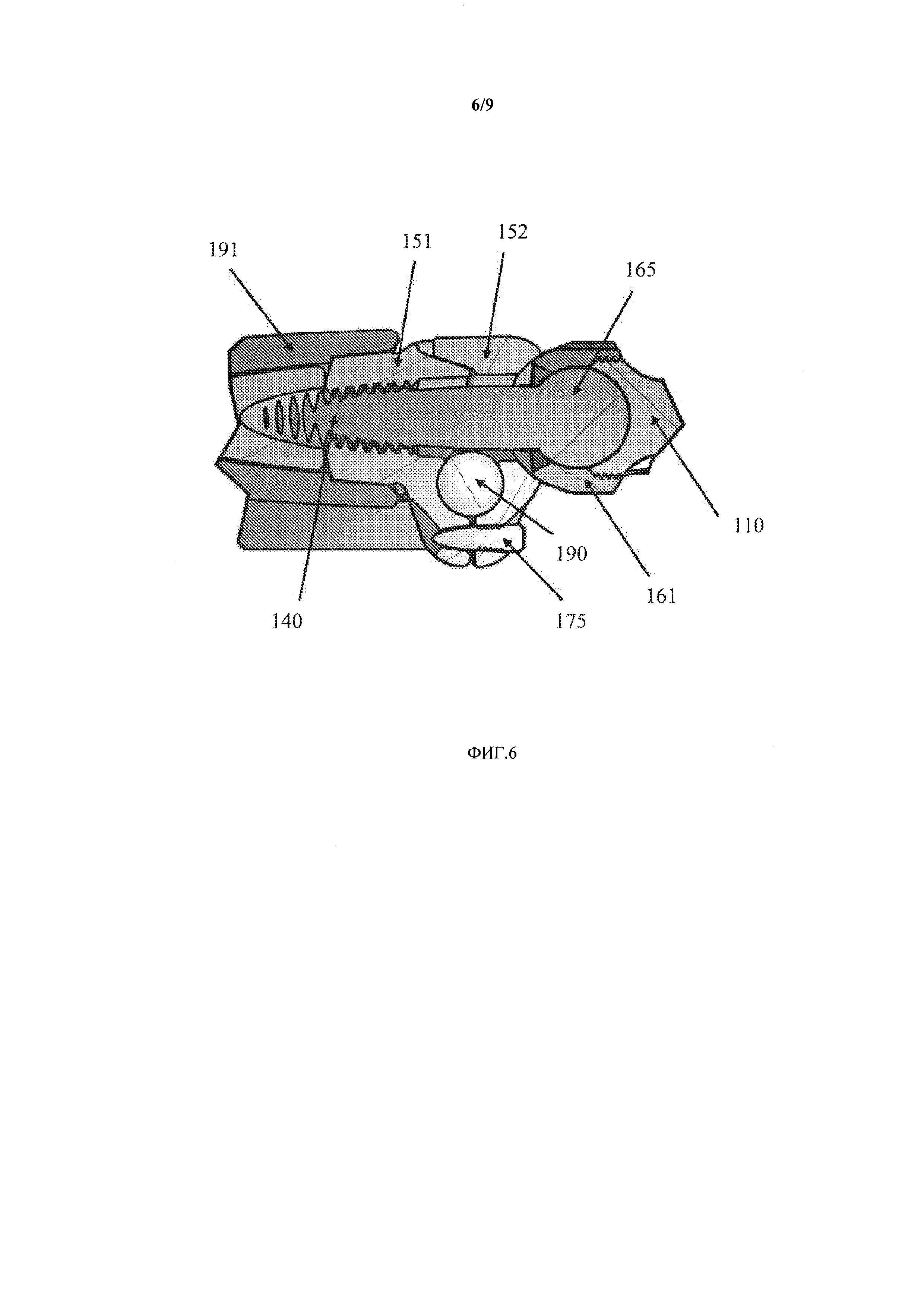
На ФИГ. 6 проиллюстрирована в поперечном сечении часть имплантата для стабилизации позвоночного столба, показанного на ФИГ. 4;
На ФИГ. 7A-7D проиллюстрированы в поперечном сечении имплантат и система для стабилизации позвоночного столба в соответствии с еще другим вариантом реализации настоящего изобретения;
На ФИГ. 8А-8В проиллюстрированы вид в перспективе и вид поперечного сечения сбоку, соответственно, набора для размещения одноразовых медицинских инструментов и имплантатов в соответствии с настоящим изобретением; и
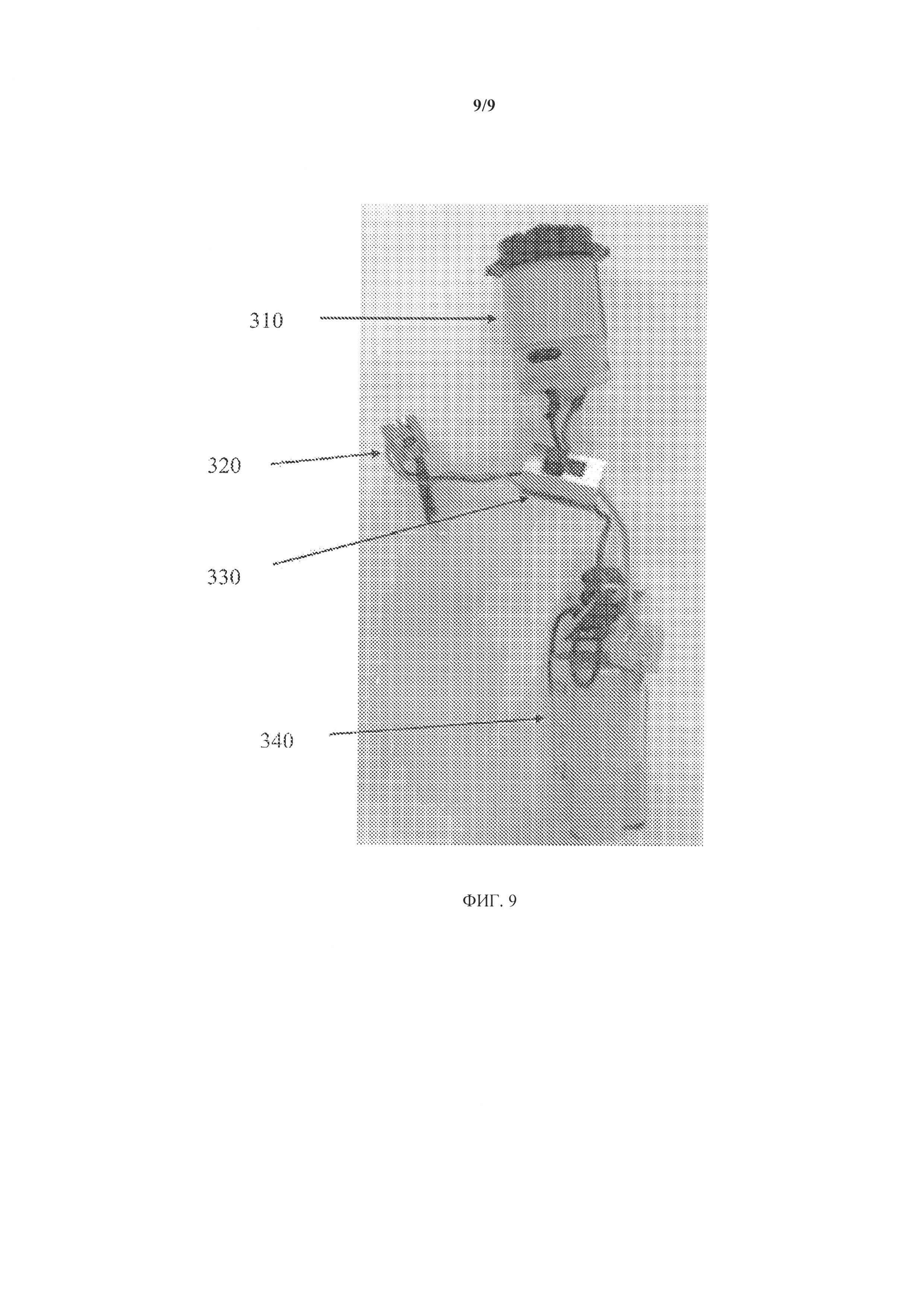
На ФИГ. 9 проиллюстрирован автоматический инструмент и его компоненты, которые используются для продвижения и закрепления имплантатов и транспедикулярных винтов, используемых в хирургии позвоночника в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на ФИГ. 1A-1D, продемонстрирован имплантат 1 для стабилизации позвоночного столба. Имплантат 1 включает транспедикулярный винт 10 (нижняя часть стержня с резьбой), приемное устройство/фиксатор 50, удлиненный элемент с резьбой 40 и стопорную гайку 60. Удлиненный элемент 40 имплантата 1 можно увидеть по-разному для того чтобы дать возможность полной конструкции (резьбовому стержню транспедикулярного винта 10, фиксатору 50, удлиненному элементу 40 и стопорной гайке 60) продвигаться вниз в ножку позвонка как единое целое; и чтобы дать возможность удлиненному элементу 40 приложить силу для затягивания стопорной гайки 60, чтобы удерживать стержень 90 между транспедикулярным винтом 10 и фиксатором 50.
Касательно имплантата 1, нижняя часть стержня с резьбой (транспедикулярного винта) 10 приспособлена для ввинчивания в позвонок. Удлиненный элемент 40 выступает из проксимального конца транспедикулярного винта 10, в направлении, противоположном транспедикулярному винту 10 и сожержит наружную резьбу. Наружная резьба удлиненного элемента 40 выполнена с возможностью обеспечения резьбового зацепления со стопорной гайкой 6, обеспечивая затягивание стопорной гайки 6 на месте для прикрепления фиксатора 50 к проксимальной головке транспедикулярного винта 10. Закрепление фиксатора 50 относительно проксимальной головки транспедикулярного винта 10 удерживает стержень 90 между ними.
В этом варианте реализации, фиксатор 50 может быть цельным, имеющим внутренний проход без резьбы с возможностью обеспечения свободного скольжения фиксатора по удлиненному элементу. По меньшей мере часть дистального конца фиксатора 50 может быть закругленной, изогнутой или вогнутой с возможностью обеспечения зацепления и уплотнения относительно имеющего подходящую для зацепления форму проксимального конца головки транспедикулярного винта при сведении, при передвижении фиксатора 50 стопорной гайкой 60 в направлении головки транспедикулярного винта с возможностью закрепления и удержания стержня 90 между ними. Фиксатор 50 может иметь сквозной паз с возможностью вхождения стержня 90. По меньшей мере часть паза внутри может быть изогнутой или закругленной с возможностью вхождения в зацепление со стержнем 90 при сведении. Паз может быть выровнен продольно и в целом перпендикулярно продольной оси имплантата, при этом паз находится на одной стороне и в непосредственной близости от удлиненного элемента и головке транспедикулярного винта.
Удлиненный элемент 40 может дополнительно включать раскрывающий разъединитель 20 (Фиг. 1В); или альтернативно может включать обратный винт 30. Раскрывающий разъединитель 20 или обратный винт 30 выполнены с возможностью обеспечения удаления части удлиненного элемента 40 после введения и стабилизации позвоночного столба. В варианте реализации, в котором удлиненный элемент включает разъединяющую деталь 20, удлиненный элемент 40 может включать наружную часть с резьбой, имеющую стандартную нарезанную резьбу, которая соответствует резьбе транспедикулярного винта 10.
Во время введения имплантата 1, стопорный штифт 70 может использоваться с возможностью предотвращения преждевременного затягивания стопорной гайки 60 относительно фиксатора 50 и передавания крутящего момента от приводного инструмента 95 на транспедикулярный винт 10 имплантата 1. Стопорный штифт 70 может быть расположен продольно в приводном инструменте 95 возле удлиненного элемента 40, с дистальным концом, введенным в углубление в стопорной гайке 60 (см. ФИГ. 1В). Стопорный штифт 70, расположенный таким образом, предупреждает вращение стопорной гайки 60 на удлиненном элементе 40 и относительно него, когда приводной инструмент 95 входит в зацепление с периферией стопорной гайки 60 с возможностью перечи вращения имплантату 1 и с возможностью продвижения транспедикулярного винта 10 в позвонок. После введения транспедикулярного винта 10 в позвонок, раскрывающий разъединитель 20 позволяет части удлиненного элемента 40 сдвигаться в сторону от транспедикулярного винта 1 при определенном крутящем моменте, оставляя низкий профиль удлиненного элемента 40. Низкий профиль сдвинутого удлиненного элемента 40 может иметь высоту, приближающуюся к проксимальному концу стопорной гайки 60 после того, как стопорная гайка 60 затянута для удержания стержня 90 между транспедикулярным винтом 10 и фиксатором 50 (см ФИГ. 1В).
Раскрывающий разъединитель 20 в удлиненном элементе 40 может представлять собой выемку, или может быть отверстием или сквозным отверстием в нем. Если он представляет собой выемку, то возможны различные формы, но предпочтительной является V-образная выемка. Если он является отверстием или сквозным отверстием, то возможны различные формы поперечного сечения, но сквозное отверстие овальной формы является предпочтительной конфигурацией раскрывающего разъединителя 20.
В качестве альтернативы удлиненный элемент 40 может включать обратный винт 30 (см ФИГ. 1D) вместо раскрывающего разъединителя 20. Обратный винт 30 может содержать углубление в проксимальном конце транспедикулярного винта 10, при этом углубление содержит внутреннюю обратную резьбу. Дистальный конец удлиненного элемента 40 будет содержать соответствующую часть с наружной резьбой с возможностью вхождения в зацепление в углублении транспедикулярного винта 10. Внутренняя обратная резьба позволяет приводному инструменту 11 стопорной гайки (см. ФИГ. 2А) предоставлять противоположный крутящий момент, таким образом, что стопорная гайка 60 может быть затянута относительно головки транспедикулярного винта 10 без продвижения транспедикулярного винта 10 далее в позвонок. Из-за того, что обратная резьба применяется с возможностью затягивания стопорной гайки 60 относительно головки транспедикулярного винта 10, в этом альтернативном варианте реализации нет необходимости использовать стопорный штифт 70. Тем не менее, стопорный штифт 70 может все еще быть желательным, чтобы передавать крутящий момент от приводного инструмента 91 к транспедикулярному винту 10.
Обратимся теперь к ФИГ. 2А-2С, приводной инструмент 91 включает приводной вал 93 и динамометрическую ручку 94 с механизмом быстрого разъединения 97. Приводной инструмент 91 (в частности динамометрическая ручка 94) обеспечивает затягивание имплантата 1 до ограниченного заданного крутящего момента. Механизм быстрого разъединения 97, связанный с динамометрической ручкой 94 выполнен с возможностью отсоединения динамометрической ручки 94 от приводного вала 93. Приводной вал 93 на приводном инструменте 91 может состоять из гладкого внешнего элемента и нижней части, при этом нижняя часть имеет углубление с внутренней обратной резьбой с возможностью вхождения в зацепление с наружной резьбой удлиненного элемента 40. В зависимости от того, используется ли стопорный штифт 70, приводной инструмент 91 может требовать или не требовать наличия внутренней полости, предоставленной для вставки стопорного штифта 70.
В другом варианте реализации приводной вал 93 будет полым, с дистальным концом, имеющим такую внутреннюю конструкцию механического привода (например, шестигранную) с возможностью вхождения в зацепление с наружной периферией головки транспедикулярного винта 10. Внутреннее углубление на дистальном конце механизма быстрого разъединения 97 также будет иметь конструкцию механического привода (например, шестигранную, обратную резьбу) с возможностью вхождения в зацепление с проксимальным концом удлиненного элемента 40. Приводной вал 93 будет скользить по удлиненному элементу 40 таким образом, что его дистальный конец будет входить в зацепление с головкой транспедикулярного винта, затем углубление на дистальном конце механизма быстрого разъединения 97 будет присоединено (например, резьбовым зацеплением) к проксимальному концу удлиненного элемента 40. В этом вариант реализации приводной вал 93 имеет плечо рычага, облегчающее продвижение (вращение) головки транспедикулярного винта при помощи приводного вала 93, а динамометрическая ручка облегчает продвижение или вращение удлиненного элемента 40 до более ограниченного заданного крутящего момента. Этот вариант реализации приводного вала 93 также является предпочтительным при использовании вариантов реализации имплантатов по настоящему изобретению, показанных на ФИГ. 3-7, где удлиненный элемент 140, 240 выполнен с возможностью вращательного движения относительно головки 219 транспедикулярного винта 110, 210.
После введения транспедикулярного винта 10 в позвонок, и в целях стабилизации позвоночного столба, для фиксации множества транспедикулярных винтов 10 друг относительно друга используется стержень 90. Стержень 90 может состоять из цельной заготовки с резьбой на наружной части на одном или обоих концах (см ФИГ 1B и 2А). Направляющий кабель 80 используется с возможностью протягивания стержня 90 через фиксаторы 50 каждого имплантата 1. Для присоединения направляющего кабеля 80 к стержню 90, стержень 90 может содержать внутреннюю полость с внутренней резьбой, которая входит в зацепление с наружной резьбой на наружной части направляющего кабеля 80. Направляющий кабель 80 может альтернативно присоединяться к стержню 90 при помощи узла или шара на конце направляющего кабеля 80, который втягивается через боковое отверстие стержня 90 и захватывается в примыкающем конечном отверстии стержня 90. Кабельный крючок 96 (см. ФИГ. 2С), который может быть выполнен из металла, используют с возможностью захватывания направляющего кабеля 80 после того, как направляющий кабель 80 прошел через каждый фиксатор 50 с возможностью протягивания направляющего кабеля 80 от предыдущего фиксатора 50 к следующему фиксатору 50 вдоль позвоночного столба.
Со ссылкой на ФИГ. 2В, в начале процедуры может быть использован гибридный расширительный бор 95, который может включать выступающий, заточенный наконечник. В других системах транспедикулярных винтов вначале в позвонок вставляют игольчатый штифт с заточенным наконечником с возможностью подготовки каждого позвонка для введения расширительного бора. Затем вводят инструмент расширительный бор с возможностью увеличения позвоночного отверстия для подготовки этого отверстия к введению транспедикулярного винта. В настоящем изобретении игольчатый штифт и расширительный бор объединены с образованием гибридного расширительного бора 95, который используют для подготовки интактного позвонка к введению транспедикулярного винта 10 в одном более удобном этапе.
Способы настоящего изобретения используются для фиксации позвоночного столба при лечении ряда состояний позвоночника. Вначале в позвонок вводят гибридный расширительный бор 95 с возможностью подготовить его ножку для введения транспедикулярного винта 10 имплантата 1. Имплантат 1 вводят в ножки на каждой стороне позвонка и, возможно, в несколько позвонков позвоночного столба - каждый на относительном расстоянии от другого. В одном аспекте в приводном инструменте 91 используется резьбовая часть удлиненного элемента 40 с возможностью приложения силы для продвижения каждого имплантата 1 в ножку позвонка. Стопорный штифт 70 может быть использован с возможностью передачи крутящей силы от приводного инструмента 91 к имплантату 1 с возможностью таким образом предотвратить случайное затягивание стопорной гайки 60 относительно фиксатора 50 имплантата 1. В другом аспекте полый приводной вал 93 приводного инструмента 91 скользит по удлиненному элементу 40, и внутренняя механическая конструкция (например, шестигранная) на дистальном конце приводного вала 93 входит в зацепление с периферией головки транспедикулярного винта (или стопорной гайки 60, если используется стопорный штифт 70) с возможностью приложения силы к каждому имплантату 1 в ножке позвонка.
После введения каждого транспедикулярного винта 10 на нужную глубину в каждую ножку, направляющий кабель 80, стержень 90 и кабельный крючок 96 используют с возможностью продевания стержня 90 через каждый фиксатор 50. Фиксаторы 50 изначально не зажаты, поэтому в них существуют большие отверстия с возможностью протягивания через них направляющего кабеля 80 и стержня 90. После установки направляющего кабеля 80 и стержня 90 сквозь первый фиксатор 50, кабельным крючком 96 захватывают направляющий кабель 80 с возможностью протягивания направляющего кабеля 80 и стержня 90 через последующий фиксаторы. После того, как стержень 90 размещен надлежащим образом внутри соответствующих фиксаторов 50, направляющий кабель 80 отсоединяют от конца стержня 90.
Затем, при его использовании, стопорный штифт 70 выходит из зацепления с приводным инструментом 91. Следующий этап способа зависит от того, используется ли в удлиненном элементе 40 раскрывающий разъединитель 20 или обратный винт 30. Если удлиненный элемент 40 имеет раскрывающий разъединитель 20, тогда удаление стопорного штифта 70 позволяет приводному инструменту 91 затягивать стопорную гайку 60 относительно фиксатора с возможностью удерживания и закрепления фиксатора относительно головки транспедикулярного винта 10, тем самым закрепляя и удерживая стержень 90 в фиксаторе 50 и относительно головки транспедикулярного винта 10 имплантата 1. Соответственно, по мере того, как стопорная гайка 60 затягивается передвижением стопорной гайки 60 вдоль удлиненного элемента 40, стопорная гайка 60 прижимает стержень 90 относительно головки транспедикулярного винта 10 внутри фиксатора 50, фиксируя стержень 90 на месте. Приводной инструмент 91 удаляют, и затем может быть использован инструмент с возможностью сдвига части удлиненного элемента 40 на раскрывающем разъединителе 20.
Если удлиненный элемент 40 имеет обратный винт 30, стопорный штифт 70 может использоваться или не использоваться для передачи крутящего момента от приводного инструмента 91 к транспедикулярному винту 10 имплантата 1. После удаления стопорного штифта 70, при его использовании, приводной инструмент стопорной гайки 92 вводят в проксимальное углубление удлиненного элемента 40 (см. ФИГ. 2А). Дистальный конец удлиненного элемента 40 будет включать соответствующую часть с наружной резьбой с возможностью вхождения в зацепление в углублении транспедикулярного винта 10. Внутренняя обратная резьба позволяет приводному инструменту стопорной гайки 11 предоставить противоположный крутящий момент, таким образом, что стопорная гайка 60 может быть затянута относительно головки транспедикулярного винта 10 без продвижения транспедикулярного винта 10 дальше в позвонок. Вновь, по мере того, как стопорная гайка 60 затягивается, стопорная гайка 60 прижимает стержень 90 относительно транспедикулярного винта 10 и фиксатора 50, фиксируя стержень 90 на месте.
После завершения описанных выше шагов процедура повторяется на противоположной ножке позвонка, и повторяется для соседнего соответствующего позвонка. После стабилизации может быть применен биопрепарат с возможностью помощи в заживлении костей и для завершения процедуры.
На ФИГ. 3-6 проиллюстрированы аспекты альтернативных вариантов реализации имплантата 100 для стабилизации позвоночного столба. На ФИГ. 3 проиллюстрировано поперечное сечение одного варианта реализации имплантата 100, который сожержит удлиненный элемент 140 с наружной резьбой, раскрывающий разъединитель 120, фиксатор, состоящий из двух частей (верхний фиксатор 151 и нижний фиксатор 152), головку поворотного соединителя 161, шар шарнирного соединения 165 (в этом варианте реализации жестко соединен на дистальном конце удлиненного элемента 140) и транспедикулярный винт 110. Транспедикулярный винт 110 может представлять собой стандартный транспедикулярный винт с наружной резьбой, подходящий для использования в ножках позвонков. Проксимальный конец транспедикулярного винта 110 (головка транспедикулярного винта 110) включает внутреннее углубление, имеющее вогнутую форму с возможностью размещения шара шарнирного соединения 165. Шар шарнирного соединения 165 может таким образом свободно вращаться в головке транспедикулярного винта, шар шарнирного соединения 165 также выполнен с возможностью полиаксиального движения удлиненного элемента 140 относительно транспедикулярного винта 110.
На ФИГ. 3 проиллюстрирован вариант реализации, в котором удлиненный элемент 140 с наружной резьбой содержит раскрывающий разъединитель 120, выполненный с возможностью сдвига при заданном уровне крутящей силы Раскрывающий разъединитель может быть расположен так, чтобы по существу выравниваться с проксимальным концом верхнего фиксатора 151 после затягивания относительно нижнего фиксатора 152 и фиксации стержня. При помещении шара шарнирного соединения 165 в вогнутую область головки транспедикулярного винта 110, головка поворотного соединителя 161 присоединяется с помощью резьбового соединения и приваривается на головку транспедикулярного винта 110, таким образом, что головка поворотного соединителя 161 подвижно удерживает на месте шар шарнирного соединения 165 (и удлиненный элемент 140 с резьбой).
На ФИГ. 4 проиллюстрированы два варианта реализации имплантата 100 для стабилизации позвоночника, демонстрирующие имплантаты 100 до введения в позвоночник, удержание стержня и противодействующий момент, и сдвиг удлиненного элемента 140 на раскрывающем разъединителе 120. Как детализировано в варианте реализации, показанном на ФИГ. 3, дистальный конец удлиненного элемента 140 с наружной резьбой содержит шар шарнирного соединения 165, удерживаемый на месте в головке транспедикулярного винта 110 при помощи головки поворотного соединителя 161. Углубление в головке транспедикулярного винта 110 имеет вогнутую форму (аналогичную по форме шару шарнирного соединения 165), таким образом, что шар шарнирного соединения 165 может свободно в нем вращаться. Эта конструкция предоставляет удлиненный элемент 140 с полиаксиальным движением и полным вращением относительно транспедикулярного винта 110.
В этом варианте реализации верхний фиксатор 151 с внутренней резьбой выполнен с возможностью передвижения по резьбе вверх и вниз удлиненного элемента 140 посредством вращения удлиненного элемента 140 относительно его продольной оси (и аналогично вращению шара шарнирного соединения 165 в головке транспедикулярного винта 110). Одним из преимуществ этого варианта реализации является то, что когда верхний фиксатор 151 имеет резьбу, на удлиненном элементе 140 выше и в сторону от нижнего фиксатора 152 для хирурга создается большая область между верхним фиксатором 151, нижним фиксатором 152 и удерживающим штифтом 175, чтобы при желании пропустить посредством этого стержень 190 при помощи направляющего стержень инструмента 172.
В этом варианте реализации в большинстве случаев вогнутый (или возможно полукруглый) паз может быть включен в каждый из верхнего фиксатора 151 и нижнего фиксатора 152 для размещения стержня 190. Один стержень 190 расположен в этом варианте реализации по существу перпендикулярно продольной оси имплантата 100, на одной стороне и в непосредственной близости от удлиненного элемента 140. В качестве альтернативы, верхний и нижний фиксаторы 151, 152 могут обеспечить размещение между ними двух стержней 190, каждый по существу перпендикулярно продольной оси имплантата 100, по одному с каждой стороны и в непосредственной близости от удлиненного элемента 140.
После того, как стержень 190 прошел через область, созданную удлиненным элементом 140, верхним фиксатором 151, нижним фиксатором 152 и удерживающим штифтом 175, хирург может вращать удлиненный элемент 140 с возможностью передвижения верхнего фиксатора 151 по направлению к нижнему фиксатору 152, затем закрепить стержень 190 между верхним фиксатором 152 и нижним фиксатором 152.
На ФИГ. 5 по существу проиллюстрированы имплантаты 100, показанные на ФИГ. 4 в конечном запертом положении стержня 190 (между верхним фиксатором 151 и нижним фиксатором 152), с теперь удаленным удерживающим штифтом 175, но до противодействующего момента и сдвига проксимальной части удлиненного элемента 140 в месте раскрывающего разъединителя 120. После завершения, имплантаты 100 и стержни 190 обеспечивают систему для стабилизации позвоночного столба.
На ФИГ. 6 проиллюстрировано поперечное сечение варианта реализации имплантата 100, показанного на ФИГ. 4 в конечном запертом положении стержня 190 (с удерживанием стержня 190 между верхним фиксатором 151 и нижним фиксатором 152). Удерживающий штифт 175 вставлен, и с помощью резьбы присоединен к нижнему фиксатору 152. На ФИГ. 6 также показан шар шарнирного соединения 165, расположенный на дистальном конце удлиненного элемента 140 с наружной резьбой, причем шар шарнирного соединения 165 удерживается на месте в головке транспедикулярного винта 110 при помощи головки поворотного соединителя 161. Как подробно описано ранее, углубление в головке транспедикулярного винта 110 имеет вогнутую форму (аналогичную по форме шару шарнирного соединения 165), таким образом, что шар шарнирного соединения 165 может свободно в нем вращаться, предоставляя удлиненному элементу 140 полиаксиальное движение и полное вращение относительно транспедикулярного винта 110. Также продемонстрирован приводной инструмент 191, входящий в зацепление с верхним фиксатором 151 и удлиненным элементом 140.
На ФИГ. 7A-7D проиллюстрированы аспекты другого варианта реализации имплантата 200 для стабилизации позвоночного столба. На ФИГ. 7А проиллюстрирован имплантат 200 в поперечном сечении, на котором показан удлиненный элемент 240 с наружной резьбой, состоящий из двух частей фиксатор (верхний фиксатор 251 и нижний фиксатор 252), головка поворотного соединителя 261 (или колпачок транспедикулярного винта), шар шарнирного соединения 265 (в этом варианте реализации жестко соединен с дистальным концом удлиненного элемента 240) и транспедикулярный винт 210. Транспедикулярный винт 110 может представлять собой стандартный транспедикулярный винт с наружной резьбой, подходящий для использования в ножках позвонков. Проксимальный конец транспедикулярного винта 110 (головка транспедикулярного винта 110 или шаровая муфта транспедикулярного винта 219) содержит внутреннее углубление, имеющее вогнутую форму с возможностью размещения шара шарнирного соединения 265. Шар шарнирного соединения 265 может таким образом свободно вращаться в головке транспедикулярного винта (шаровой муфте транспедикулярного винта 219), шар шарнирного соединения 265 также выполнен с возможностью полиаксиального движения удлиненного элемента 240 относительно транспедикулярного винта 210.
На ФИГ. 7В также в поперечном сечении проиллюстрировано, что удлиненный элемент 240 с наружной резьбой может также включать раскрывающий разъединитель 220, предоставляющий возможность сдвига при заданной крутящей силе. Раскрывающий разъединитель 220 может быть расположен таким образом, чтобы по существу выравниваться с проксимальным концом верхнего фиксатора 251 после затягивания относительно нижнего фиксатора 252 и фиксации стержня или стержней 290. При помещении шара шарнирного соединения 265 в шаровую муфту транспедикулярного винта 219, головка поворотного соединителя (колпачок транспедикулярного винта 261) присоединяется с помощью резьбового соединения и приваривается на шаровую муфту транспедикулярного винта 219 таким образом, что головка поворотного соединителя 261 подвижно удерживает на месте шар шарнирного соединения 265 (и удлиненный элемент 240 с резьбой).
Как и в варианте реализации, проиллюстрированном на ФИГ. 4-6, нижний фиксатор 252 и верхний фиксатор 251 действуют вместе с возможностью затягивания стержня или стержней 290 и обеспечения фиксации позвоночного столба. В нижнем фиксаторе 252 и верхнем фиксаторе 251 имеются вогнутые полости с возможностью размещения стержня или стержней 290. Продемонстрированный на ФИГ. 7A-7D вариант реализации имплантата 200, тем не менее, включает верхний и нижний фиксаторы 251, 252 с возможностью обеспечения размещения двух стержней 290 между ними, при этом каждый стержень 290 находится в вогнутой полости, выровненной по существу перпендикулярно продольной оси имплантата 200, по одной полости на каждой стороне и в непосредственной близости от удлиненного элемента 240.
Как продемонстрировано на ФИГ. 7C-7D, хотя верхний фиксатор 251 и нижний фиксатор 252 сконфигурированы таким образом, чтобы удерживать два стержня 290, смежно введенные имплантаты 200 могут удерживать один U-образный стержень 290, стержень, который имеет U-образный изгиб 299 на одном его конце. Вогнутые полости верхнего фиксатора 251 и нижнего фиксатора 252 имеют допуски, так что после затягивания на месте фиксатор 251, 252 запирает U-образный стержень 290 в месте между ними. U-образный стержень 290 сконфигурирован с возможностью балансирования силы по всему имплантату 200. U-образный стержень 290 имеет пулевидные наконечники на каждом из свободных концов и имеет U-образный изгиб 299 на соответствующем другом конце. Пулевидные наконечники U-образного стержня 290 сконфигурированы с возможностью скользящей вставки между нижним фиксатором 252 и верхним фиксатором 251.
В этом варианте реализации нижний фиксатор 252 может иметь внутренний проход без резьбы, таким образом, что нижний фиксатор 252 способен свободно скользить по удлиненному элементу 240. Кроме того, обратная сторона нижнего фиксатора 252 является вогнутой с возможностью обеспечения зацепления и уплотнения относительно имеющего подходящую для зацепления форму колпачка транспедикулярного винта 261 при сведении. Верхний фиксатор 251 имеет внутренний проход с резьбой с возможностью вхождения в резьбовое зацепление с наружной резьбой удлиненного элемента 240. Во время затягивания внутренняя резьба верхнего фиксатора 251 и наружная резьба удлиненного элемента 240 вместе обеспечивают сведение с возможностью затягивания нижнего фиксатора 252 и верхнего фиксатора 251 относительно U-образного стержня 290 и верхушки колпачка транспедикулярного винта 261. После сведения верхний фиксатор 251 затягивают дополнительно, до тех пор, пока крутящая сила не превысит порог сдвига раскрывающего разъединителя 220 в удлиненном элементе 240 с возможностью сдвига части удлиненного элемента 240 проксимально к раскрывающему разъединителю 220.
Для проиллюстрированных на ФИГ. 3-7 вариантов реализации имплантата 100, 200 по настоящему изобретению, приводной инструмент 91 содержит приводной вал 93 и динамометрическую ручку 94 с механизмом быстрого разъединения 97. Приводной инструмент 91 обеспечивает возможность затягивания имплантата 100, 200 до конечного заданного крутящего момента. Механизм быстрого разъединения 97, связанный с динамометрической ручкой 94, предоставляет возможность отъединения динамометрической ручки 94 от приводного вала 93. Приводной вал 93 является полым, при этом дистальный конец имеет внутреннюю конструкцию механического привода (например, шестигранную) с возможностью вхождения в зацепление с наружной периферией головки 219 транспедикулярного винта 110, 210. Внутреннее углубление на дистальном конце механизма быстрого разъединения 97 также будет иметь конструкцию механического привода (например, шестигранную, обратную резьбу) с возможностью входить в зацепление с проксимальным концом удлиненного элемента 140, 240. Полый приводной вал 93 скользит по удлиненному элементу 140, 240, таким образом, что его дистальный конец входит в зацепление с головкой транспедикулярного винта. Затем углубление на дистальном конце механизма быстрого разъединения 97 присоединяется (например, резьбовым зацеплением) к проксимальному концу удлиненного элемента 40. В этом варианте реализации приводного инструмента 91, приводной вал 93 имеет плечо рычага, облегчающее продвижение (вращение) головки 219 транспедикулярного винта 110, 210 при помощи приводного вала 93, а динамометрическая ручка 94 облегчает продвижение или вращение удлиненного элемента 140, 240. Здесь динамометрическая ручка 94 будет вращать удлиненный элемент 140, 240, с возможностью скользящим образом передвигать верхнюю часть фиксатора 151, 251 дистально по направлению к нижней части фиксатора 152, 252 с возможностью закрепления и фиксации стержня 190, 290 между ними. В качестве конечного затягивания верхней части фиксатора 151, 251 относительно нижней части фиксатора 152, 252 другой полый приводной вал 93 может иметь дистальный конец, имеющий такую внутреннюю конструкцию механического привода (например, шестигранную, зубья) с возможностью вхождения в зацепление с наружной периферией (или верхушкой) верхней части фиксатора 151, 251 с возможностью специально приложить к ней крутящий момент для фиксации и закрепления стержня 190, 290.
На ФИГ. 8А и 8В проиллюстрирован вид в перспективе и вид сбоку, соответственно, поперечного сечения формованного полимерного лотка (набора) для хранения одноразовых медицинских инструментов и имплантатов вместе с полимерной крышкой для размещения инструментов. Лоток может быть выполнен из полимера, с возможностью проникновения гамма стерилизации в лоток для стерилизации имплантатов и инструментов для хирургического использования, и затем герметизации инструментов и имплантатов с возможностью предотвращения повторного загрязнения перед вскрытием и использованием. Набор может быть формованным, чтобы соответствовать любым комплектам инструментов и имплантатов, детально описанным в настоящей заявке, или любым медицинским инструментам и имплантатам вообще. В то время как на ФИГ. 8А и 8В показан лоток, имеющий одну, как правило, открытую полость с возможностью размещения инструментов и имплантатов, другой вариант реализации может иметь полости с индивидуальными размерами и формовкой с возможностью более точно соответствовать каждому инструменту и имплантату.
На ФИГ. 9 проиллюстрированы компоненты автоматического инструмента, используемого в спинальной хирургии. Автоматический прибор содержит электронный мотор 310 (высокий крутящий момент / низкий крутящий момент), калиброванный и с зубчатыми передачами, конкретно с возможностью продвижения и затягивания имплантатов и транспедикулярных винтов, используемых в спинальной хирургии, таких как транспедикулярные винты, включенные в настоящее изобретение и имплантаты, описанные в нем. Мотор 310 содержит переключатель 320 и микропроцессор 320 с возможностью контроля и изменения зубчатой передачи электродвигателя 310. Установка низкого значения крутящего момента предлагает среднее количество оборотов в минуту, приводную функцию с низким крутящим моментом с возможностью затягивания фиксатора на имплантате по настоящему изобретению. Установка высокого значения крутящего момента предлагает низкое количество оборотов в минуту, приводную функцию с высоким крутящим моментом для сдвига / отрыва части удлиненного элемента имплантатов настоящего изобретения на раскрывающем разъединителе, расположенном на соответствующих удлиненных элементах. Автоматический инструмент может дополнительно быть одноразовым, окончательно простерилизованным устройством. Аккумуляторная батарея 340 может питать электронный мотор 310, переключатель 330 и микропроцессор 320. Автоматический инструмент может быть упакован в набор вместе с соответствующими имплантатами и инструментами, по желанию, и простерилизован для однократного использования на стерильном поле.
Возвращаясь к ФИГ. 3, иллюстрирующей в поперечном сечении вариант реализации одного имплантата по настоящему изобретению, предоставляется только один пример конструкции, подходящей для использования с автоматическим инструментом, продемонстрированным на ФИГ. 9. Как подробно описано ранее, имплантат 100 сожержит удлиненный элемент 140 с резьбой, имеющий раскрывающий разъединитель 120, верхний фиксатор 151, нижний фиксатор 152, головку поворотного соединителя 161, шар шарнирного соединения 165 и транспедикулярный винт 110. Раскрывающий разъединитель 120 выполнен с возможностью сдвига части удлиненного элемента 140 при заданном уровне крутящего момента. Автоматический инструмент обеспечивает этот заданный уровень крутящего момента.
В настоящее время почти все транспедикулярные винты закручиваются и затягиваются в позвонке в заданных пределах вручную с использованием определенного типа динамометрической ручки с ограничением по крутящему моменту. Полиаксиальная подвижность определенных вариантов реализации настоящего изобретения, например, имплантата 100, проиллюстрированного на ФИГ. 3, происходит от подвижности шара шарнирного соединения 165 в головке транспедикулярного винта, продвижение транспедикулярного винта 110 в позвонок предпочтительно выполняется с использованием присоединения приводного инструмента к головке транспедикулярного винта (или, в частности в данном варианте реализации, на периферию головки поворотного соединителя 165). Автоматический привод, показанный на ФИГ. 9 может обеспечить затягивание и закручивание для конечного пользователя. Этот автоматический инструмент является существенным новшеством по сравнению с существующими хирургическими инструментами, все из которых являются ручными инструментами.
Эти и другие преимущества настоящего изобретения будут очевидны для специалистов в данной области техники из предшествующего описания. Соответственно, специалистам в данной области техники будет понятно, что в вышеописанных вариантах реализации могут быть сделаны изменения или модификации, не отходя от широкой изобретательской концепции настоящего изобретения. Например, признаки, подробно описанные выше как включенные в определенные конкретные варианты реализации, признаются взаимозаменяемыми и, возможно, включены в другие подробные варианты реализации. Конкретные размеры любого конкретного варианта реализации описаны только для иллюстрации. Таким образом, следует понимать, что данное изобретение не ограничивается конкретными вариантами реализации, описанными в настоящем документе, но предполагает включение всех изменений и модификаций, которые находятся в пределах сущности и объема настоящего изобретения.
Реферат
Группа изобретений относятся к медицине. Имплантат для стабилизации позвоночного столба содержит транспедикулярный винт, удлиненный элемент и двухчастный фиксатор. Удлиненный элемент полиаксиально подвижно соединен с транспедикулярным винтом. Удлиненный элемент выполнен с возможностью совершения полного поворота вокруг своей продольной оси и имеет наружную резьбу на протяжении по меньшей мере части его продольной периферии. Двухчастный фиксатор имеет цельную верхнюю часть фиксатора и цельную нижнюю часть фиксатора, отдельную от верхней части фиксатора. Верхняя и нижняя части фиксатора имеют каждая внутренний сквозной проход вдоль соответствующей продольной оси и вокруг нее. Полностью насквозь через каждый проход введен удлиненный элемент. Верхняя и нижняя части фиксатора также имеют каждая сквозное вогнутое отверстие для введения в него стержня, используемого для фиксации одного имплантата к другому. Верхняя часть фиксатора имеет внутреннюю резьбу, выполненную с возможностью вхождения в зацепление с наружной резьбой удлиненного элемента. Верхняя часть фиксатора выполнена с возможностью перемещения по резьбе продольно вдоль удлиненного элемента посредством поворота удлиненного элемента вокруг его продольной оси. Верхняя часть фиксатора выполнена с возможностью перемещения по резьбе продольно вдоль удлиненного элемента в направлении нижней части фиксатора с возможностью закрепления и удержания стержня между верхней частью фиксатора и нижней частью фиксатора, обеспечивая посредством этого фиксацию одного имплантата к другому. Имплантат для стабилизации позвоночного столба включает
Формула
транспедикулярный винт;
удлиненный элемент, полиаксиально подвижно соединенный с транспедикулярным винтом, при этом удлиненный элемент выполнен с возможностью совершения полного поворота вокруг своей продольной оси и имеет наружную резьбу на протяжении по меньшей мере части его продольной периферии; и
двухчастный фиксатор, имеющий цельную верхнюю часть фиксатора и цельную нижнюю часть фиксатора, отдельную от верхней части фиксатора, при этом верхняя и нижняя части фиксатора имеют каждая внутренний сквозной проход вдоль соответствующей продольной оси и вокруг нее, причем полностью насквозь через каждый проход введен удлиненный элемент, и верхняя и нижняя части фиксатора также имеют каждая сквозное вогнутое отверстие для введения в него стержня, используемого для фиксации одного имплантата к другому; отличающийся тем, что:
верхняя часть фиксатора имеет внутреннюю резьбу, выполненную с возможностью вхождения в зацепление с наружной резьбой удлиненного элемента, верхний фиксатор выполнен с возможностью перемещения по резьбе продольно вдоль удлиненного элемента посредством поворота удлиненного элемента вокруг его продольной оси; и
верхняя часть фиксатора выполнена с возможностью перемещения по резьбе продольно вдоль удлиненного элемента в направлении нижней части фиксатора с возможностью закрепления и удержания стержня между верхней частью фиксатора и нижней частью фиксатора, обеспечивая посредством этого фиксацию одного имплантата к другому.
транспедикулярный винт;
удлиненный элемент, полиаксиально подвижно соединенный с транспедикулярным винтом, при этом удлиненный элемент выполнен с возможностью совершения полного поворота вокруг своей продольной оси и имеет наружную резьбу на протяжении по меньшей мере части его продольной периферии и содержит шар шарнирного соединения, жестко соединенный с его дистальным концом, причем шар шарнирного соединения находится в вогнутом углублении головки транспедикулярного винта, обеспечивая посредством этого полиаксиальное подвижное соединение между удлиненным элементом и транспедикулярным винтом; и
двухчастный фиксатор, имеющий цельную верхнюю часть фиксатора и цельную нижнюю часть фиксатора, отдельную от верхней части фиксатора, при этом верхняя и нижняя части фиксатора имеют каждая сквозное вогнутое отверстие для приема стержня, используемого для фиксации одного имплантата к другому; причем
верхняя часть фиксатора имеет внутреннюю резьбу, выполненную с возможностью вхождения в зацепление с наружной резьбой удлиненного элемента, верхний фиксатор выполнен с возможностью перемещения по резьбе продольно вдоль удлиненного элемента посредством поворота удлиненного элемента вокруг его продольной оси; и
верхняя часть фиксатора выполнена с возможностью перемещения в направлении нижней части фиксатора с закреплением и удержанием стержня между верхней частью фиксатора и нижней частью фиксатора, обеспечивая посредством этого фиксацию одного имплантата к другому.
по меньшей мере один имплантат в соответствии с п. 1 или п. 10;
приводной инструмент для вставки и затягивания указанного по меньшей мере одного имплантата до конечного заданного крутящего момента; и
полимерный лоток для упаковки и стерилизации указанного по меньшей мере одного имплантата и приводного инструмента.
Документы, цитированные в отчёте о поиске
Устройство для фиксации и коррекции деформаций позвоночника
Комментарии