Ультразвуковое устройство для рассечения и коагуляции - RU2669023C2
Код документа: RU2669023C2
Чертежи












Описание
Эта заявка устанавливает приоритет перед заявкой на временный патент США № 61/640227 под названием «Ультразвуковое устройство для рассечения и коагуляции», поданной 30 апреля 2012 года, описание которой включено в этот документ путем ссылки.
Эта заявка также устанавливает приоритет перед заявкой на временный патент США № 61/722986 под названием «Ультразвуковое устройство для рассечения и коагуляции», поданной 6 ноября 2012 года, описание которой включено в этот документ путем ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Различные хирургические инструменты включают концевой рабочий орган с режущим элементом, который вибрирует на ультразвуковых частотах для рассечения и/или сшивания тканей (например, путем денатурации белков в клетках тканей). Эти инструменты включают пьезоэлектрические элементы, преобразующие электрическую энергию в ультразвуковые вибрации, которые передаются по акустическому волноводу на режущий элемент. Точность рассечения и коагуляции может регулироваться при помощи хирургической техники и путем настройки уровня мощности, края лезвия, трения тканей и давления лезвия.
Примеры ультразвуковых хирургических инструментов включают ультразвуковые ножницы HARMONIC ACE®, ультразвуковые ножницы HARMONIC WAVE®, ультразвуковые ножницы HARMONIC FOCUS® и ультразвуковые лезвия HARMONIC SYNERGY®, все произведены компанией Ethicon Endo-Surgery, Inc. в Цинциннати, Огайо. Другие примеры таких устройств и сопутствующих замыслов представлены в патенте США № 5322055 под названием «Зажимной коагулятор/система рассечения для ультразвуковых хирургических инструментов» от 21 июня 1994 года, описание которого включено в этот документ путем ссылки; патенте США № 5,873,873 под названием «Ультразвуковой зажимной коагулирующий аппарат с улучшенным зажимным механизмом» от 23 февраля 1999 года, описание которого включено в этот документ путем ссылки; патенте США № 5980510 под названием «Ультразвуковой зажимной коагулирующий аппарат с улучшенным креплением зажимного рычага», поданной 10 октября 1997 года, описание которого включено в этот документ путем ссылки; патенте США № 6325811 под названием «Лезвия с функциональной асимметрией баланса для применения с ультразвуковыми хирургическими инструментами» от 4 декабря 2001 года, описание которого включено в этот документ путем ссылки; патенте США № 6773444 под названием «Лезвия с функциональной асимметрией баланса для применения с ультразвуковыми хирургическими инструментами», выпущенной 10 августа 2004 года, описание которого включено в этот документ путем ссылки; и патенте США № 6783524 под названием «Робототехнический хирургический инструмент с ультразвуковым прижиганием и режущим инструментом» от 31 августа 2004 года, описание которого включено в этот документ путем ссылки.
Другие примеры ультразвуковых хирургических инструментов представлены в публикации США № 2006/0079874 под названием «Тканевая подкладка для применения с ультразвуковым хирургическим инструментом» от 13 апреля 2006 года, описание которой включено в этот документ путем ссылки; публикации США № 2007/0191713 под названием «Ультразвуковое устройство для рассечения и коагуляции», сделанной 16 августа 2007 года, описание которой включено в этот документ путем ссылки; публикации США № 2007/0282333 под названием «Ультразвуковой волновод и лезвие», сделанной 6 декабря 2007 года, описание которой включено в этот документ путем ссылки; публикации США № 2008/0200940 под названием «Ультразвуковое устройство для рассечения и коагуляции», сделанной 21 августа 2008 года, описание которой включено в этот документ путем ссылки; публикации США № 2009/0105750 под названием «Эргономичные хирургические инструменты», сделанной 23 апреля 2009 года, описание которой включено в этот документ путем ссылки; публикации США № 2010/0069940 под названием «Ультразвуковое устройство с сенсорным управлением», сделанной 18 марта 2010 года, описание которой включено в этот документ путем ссылки; и публикации США № 2011/0015660 под названием «Вращающаяся преобразовательная головка для ультразвуковых хирургических инструментов», сделанной 20 января 2011 года, описание которой включено в этот документ путем ссылки; публикации США № 2012/0029546 под названием «Ультразвуковые лезвия для хирургических инструментов», сделанной 2 февраля 2012 года, описание которой включено в этот документ путем ссылки; заявке на патент США № 13/538588, поданной 29 июня 2012 года, под названием «Хирургические инструменты с шарнирными ручками», описание которой включено в этот документ путем ссылки; и заявке на патент США № 13/657553, поданной 22 октября 2012 года, под названием «Гибкие гармонические волноводы/лезвия для хирургических инструментов», описание которой включено в этот документ путем ссылки.
Также некоторые из ранее указанных хирургических инструментов могут включать беспроводной преобразователь, такой как представленный в публикации США № 2012/0112687 под названием «Система зарядки для медицинских устройств», сделанной 10 мая 2012 года, описание которой включено в этот документ путем ссылки; публикации США № 2012/0116265 под названием «Хирургические инструменты с зарядными устройствами», сделанной 10 мая 2012 года, описание которой включено в этот документ путем ссылки; и/или заявке на патент США № 61/410603, поданной 5 ноября 2010 года, под названием «Хирургические инструменты на энергетической основе», описание которой включено в этот документ путем ссылки.
Несмотря на то что были сделаны и используются несколько хирургических инструментов и систем, считается, что ни один из изобретателей пока не сделал и не использовал изобретение, описанное в прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Несмотря на то что описание изобретения заканчивается формулой изобретения, которая подробно описывает данную технологию, предполагается, что лучшему пониманию настоящей технологии послужит следующее описание нескольких примеров осуществления, приведенное в сочетании с сопроводительными чертежами, на которых одинаковые номера позиций обозначают одинаковые элементы.
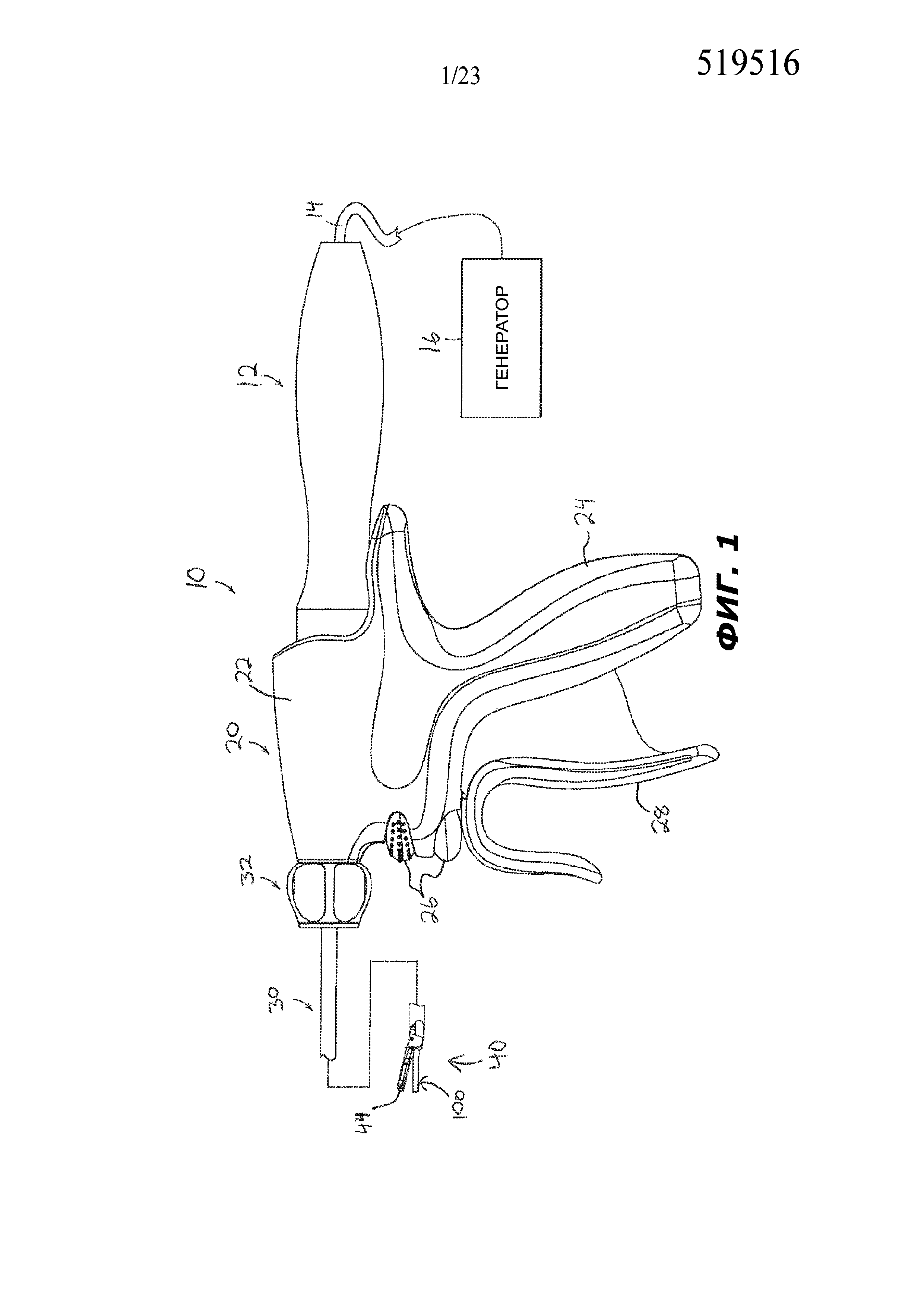
ФИГ. 1 показывает боковую вертикальную проекцию примера ультразвукового хирургического инструмента.
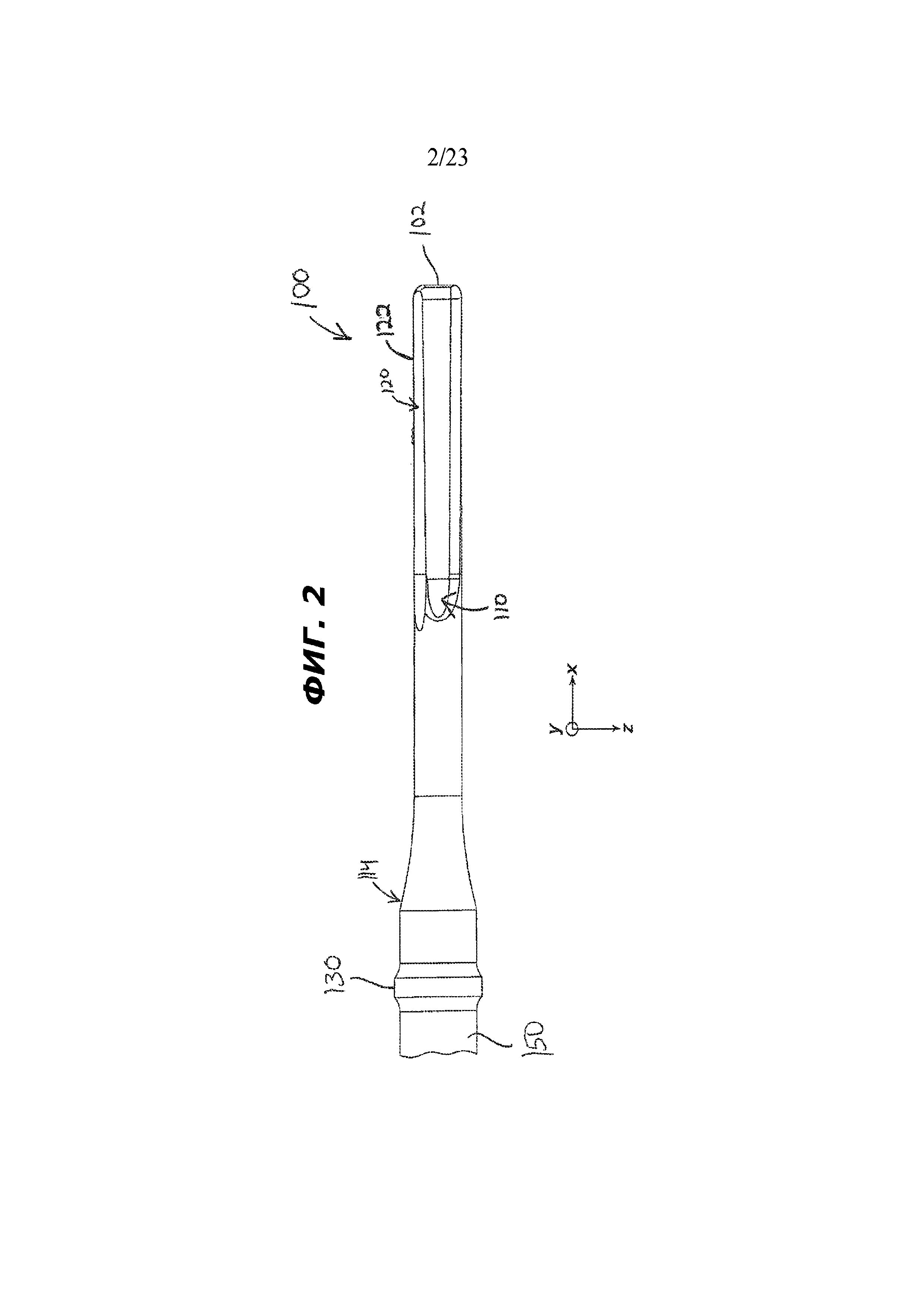
ФИГ. 2 показывает вертикальную проекцию слева для ультразвукового лезвия хирургического инструмента, показанного на ФИГ. 1.
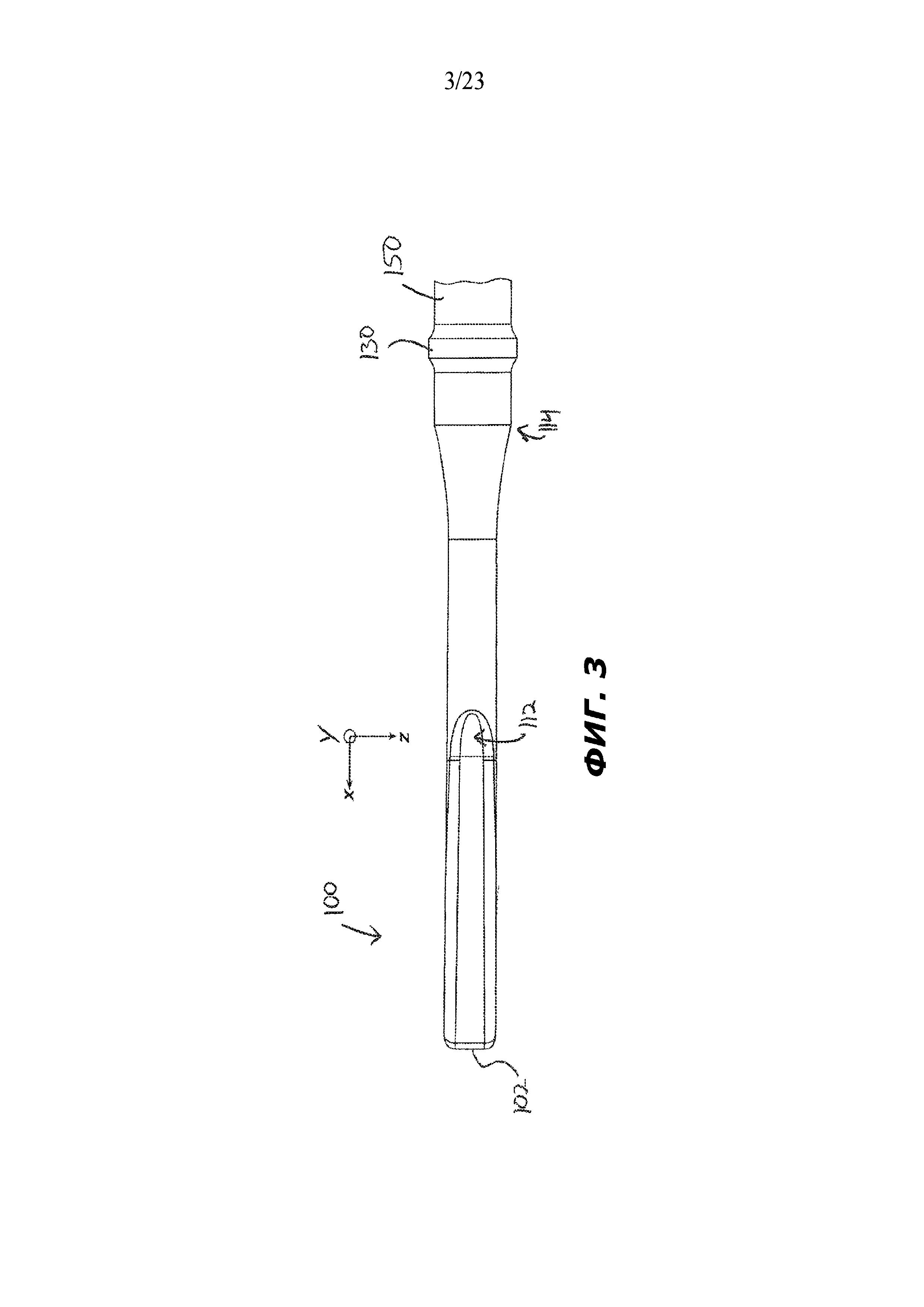
ФИГ. 3 показывает вертикальную проекцию справа для ультразвукового лезвия, показанного на ФИГ. 2.
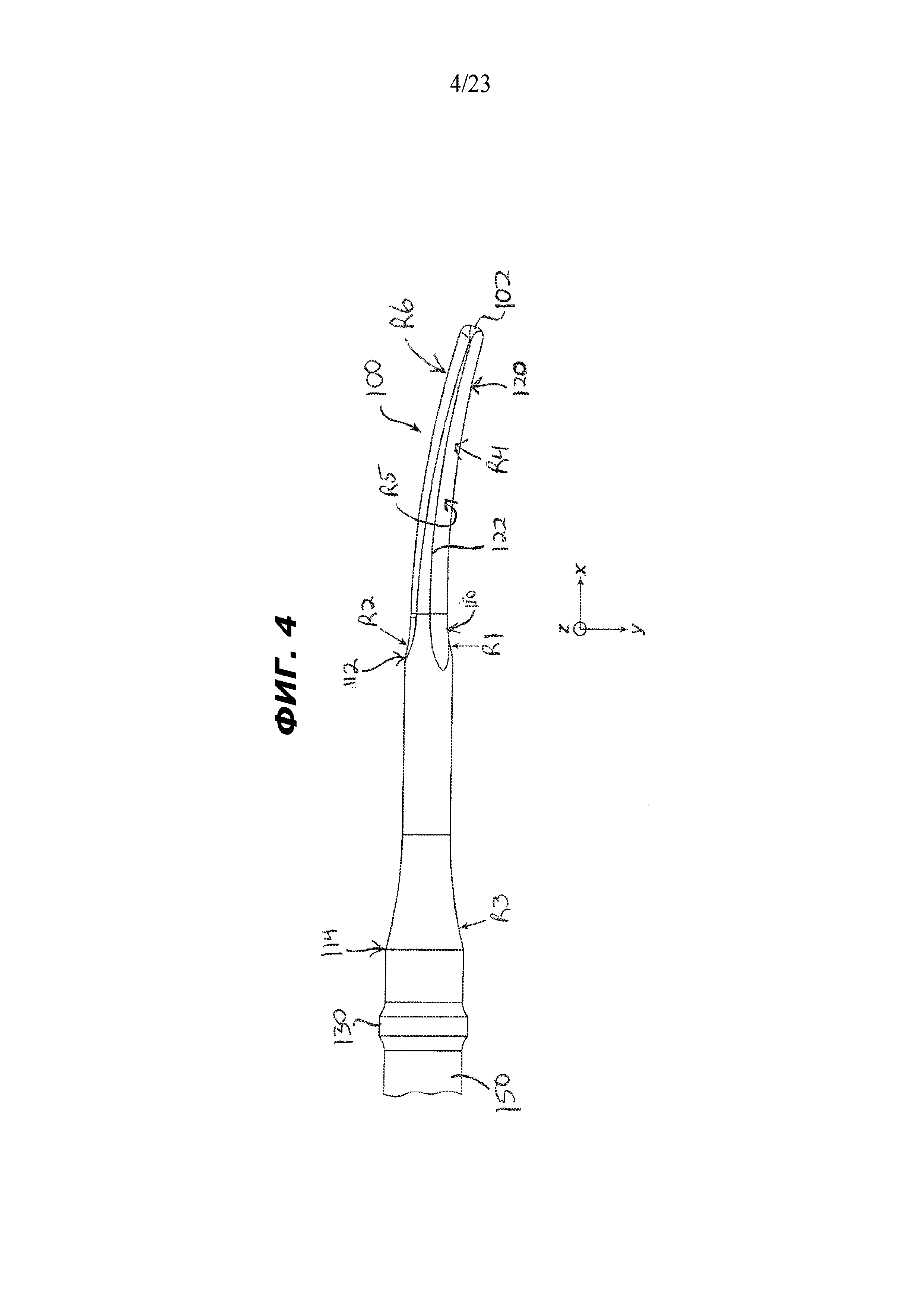
ФИГ. 4 показывает вид сверху для ультразвукового лезвия, показанного на ФИГ. 2.
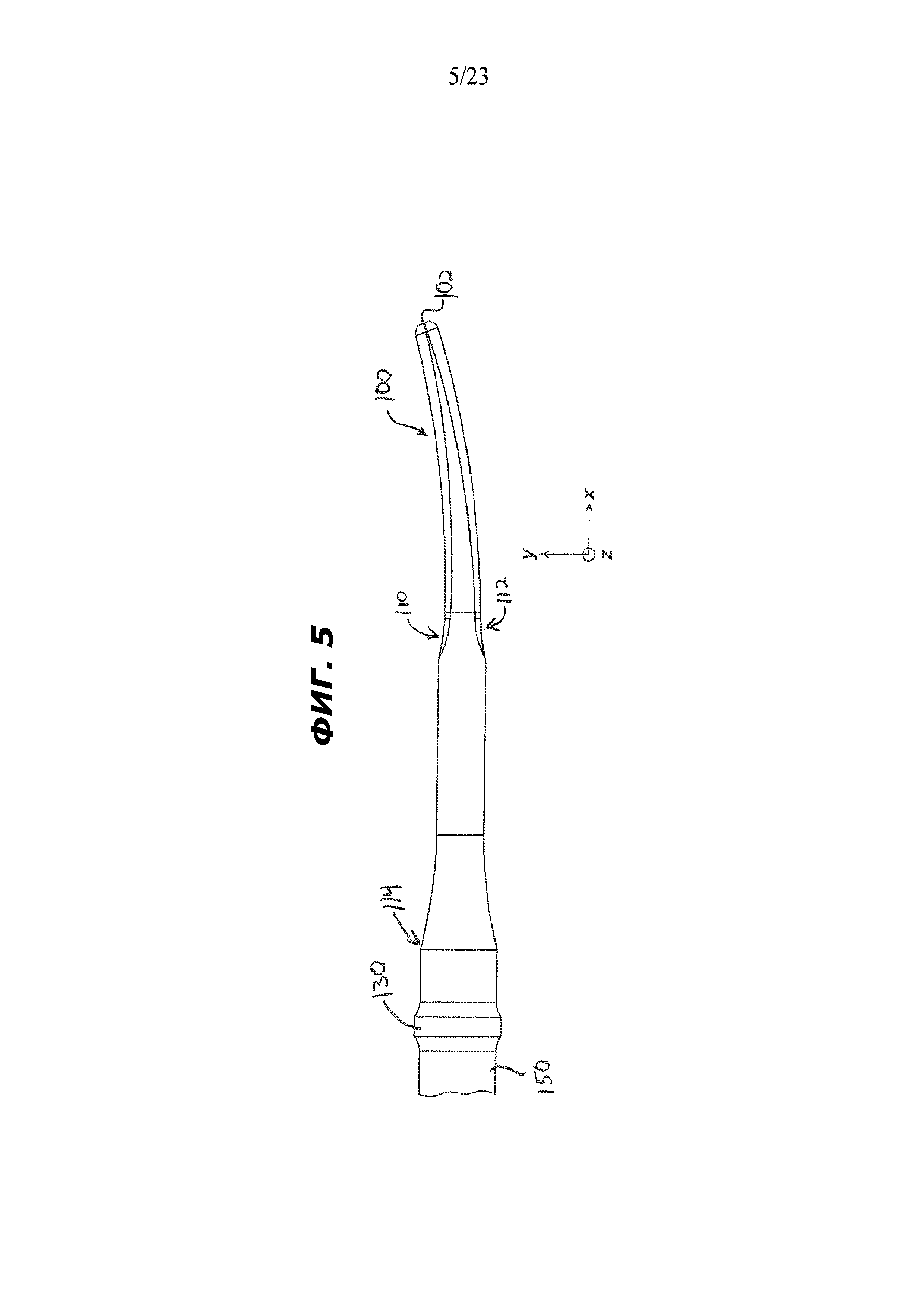
ФИГ. 5 показывает вид снизу для ультразвукового лезвия, показанного на ФИГ. 2.
ФИГ. 6 показывает вид сверху для ультразвукового лезвия, показанного на ФИГ. 2, с указанием нескольких поперечных разрезов.
ФИГ. 7 показывает поперечный разрез ультразвукового лезвия, показанного на ФИГ. 2, сделанный вдоль линии 7-7 на ФИГ. 6.
ФИГ. 8 показывает поперечный разрез ультразвукового лезвия, показанного на ФИГ. 2, сделанный вдоль линии 8-8 на ФИГ. 6.
ФИГ. 9 показывает поперечный разрез ультразвукового лезвия, показанного на ФИГ. 2, сделанный вдоль линии 9-9 на ФИГ. 6.
ФИГ. 10 показывает вид сверху для примера альтернативного ультразвукового лезвия, адаптированного для включения в инструмент, показанный на ФИГ. 1.
ФИГ. 11 показывает боковую вертикальную проекцию части акустического волновода хирургического инструмента, показанного на ФИГ. 1.
ФИГ. 12 показывает вид сверху части акустического волновода, показанного на ФИГ. 11.
ФИГ. 13 показывает схематичное изображение примера контура, адаптированного для включения в инструмент, показанный на ФИГ. 1.
ФИГ. 14 показывает схематичное изображение другого примера контура, адаптированного для включения в инструмент, показанный на ФИГ. 1.
ФИГ. 15 показывает схематичное изображение другого примера контура, адаптированного для включения в инструмент, показанный на ФИГ. 1.
ФИГ. 16 показывает схематичное изображение другого примера контура, адаптированного для включения в инструмент, показанный на ФИГ. 1.
ФИГ. 17 показывает схематичное изображение другого примера контура, адаптированного для включения в инструмент, показанный на ФИГ. 1.
ФИГ. 18 показывает примеры выходных форм сигнала у контуров, показанных на ФИГ. 15-17.
ФИГ. 19 показывает схематичное изображение другого примера контура, адаптированного для включения в инструмент, показанный на ФИГ. 1.
ФИГ. 20 показывает примеры выходных форм сигнала у контура, показанных на ФИГ. 19.
ФИГ. 21 показывает развернутую перспективу примеров корпусных компонентов, которые можно включить в инструмент, приведенный на ФИГ. 1.
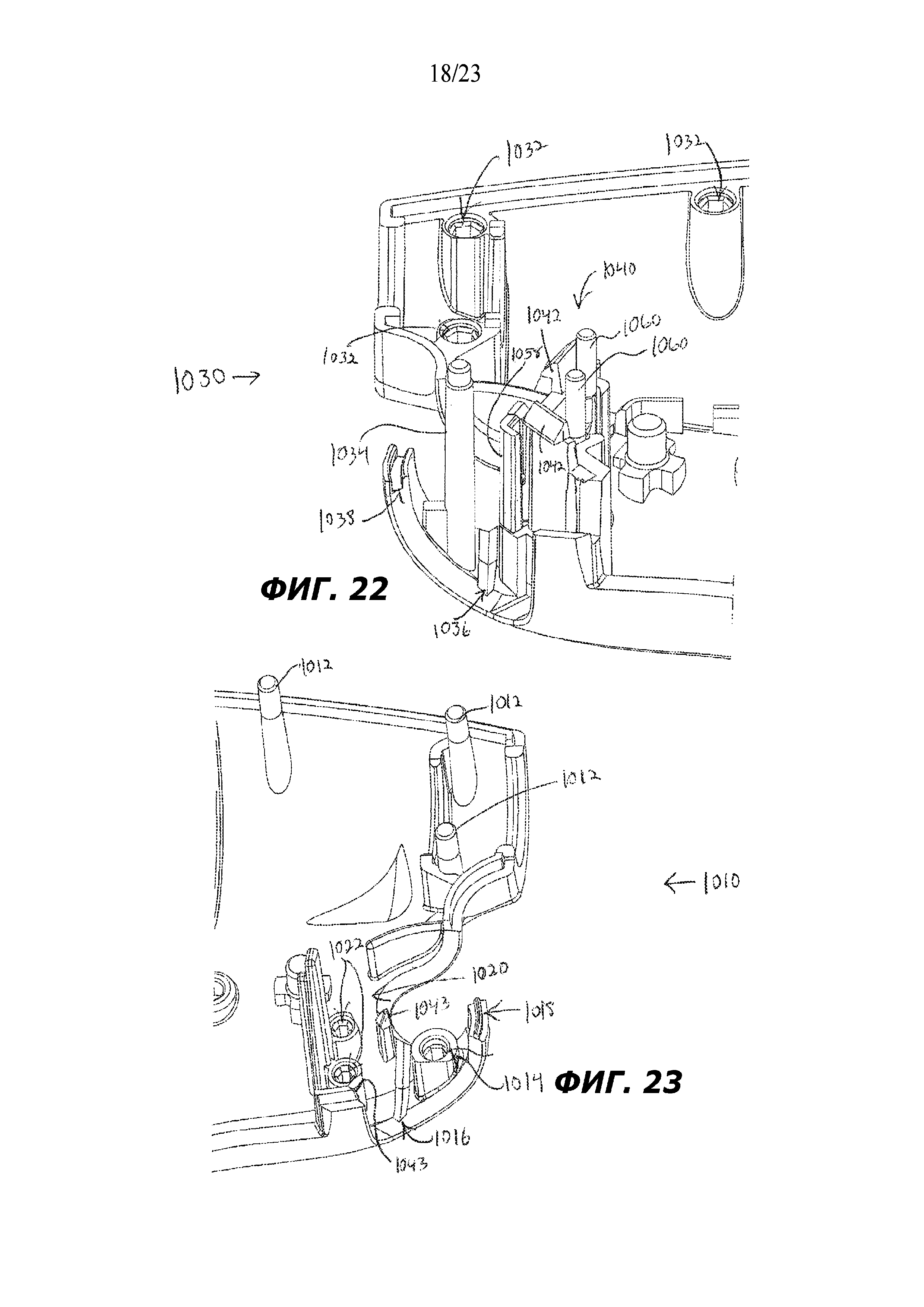
ФИГ. 22 показывает частичную перспективу первого из корпусных компонентов, показанных на ФИГ. 21.
ФИГ. 23 показывает частичную перспективу второго из корпусных компонентов, показанных на ФИГ. 21.
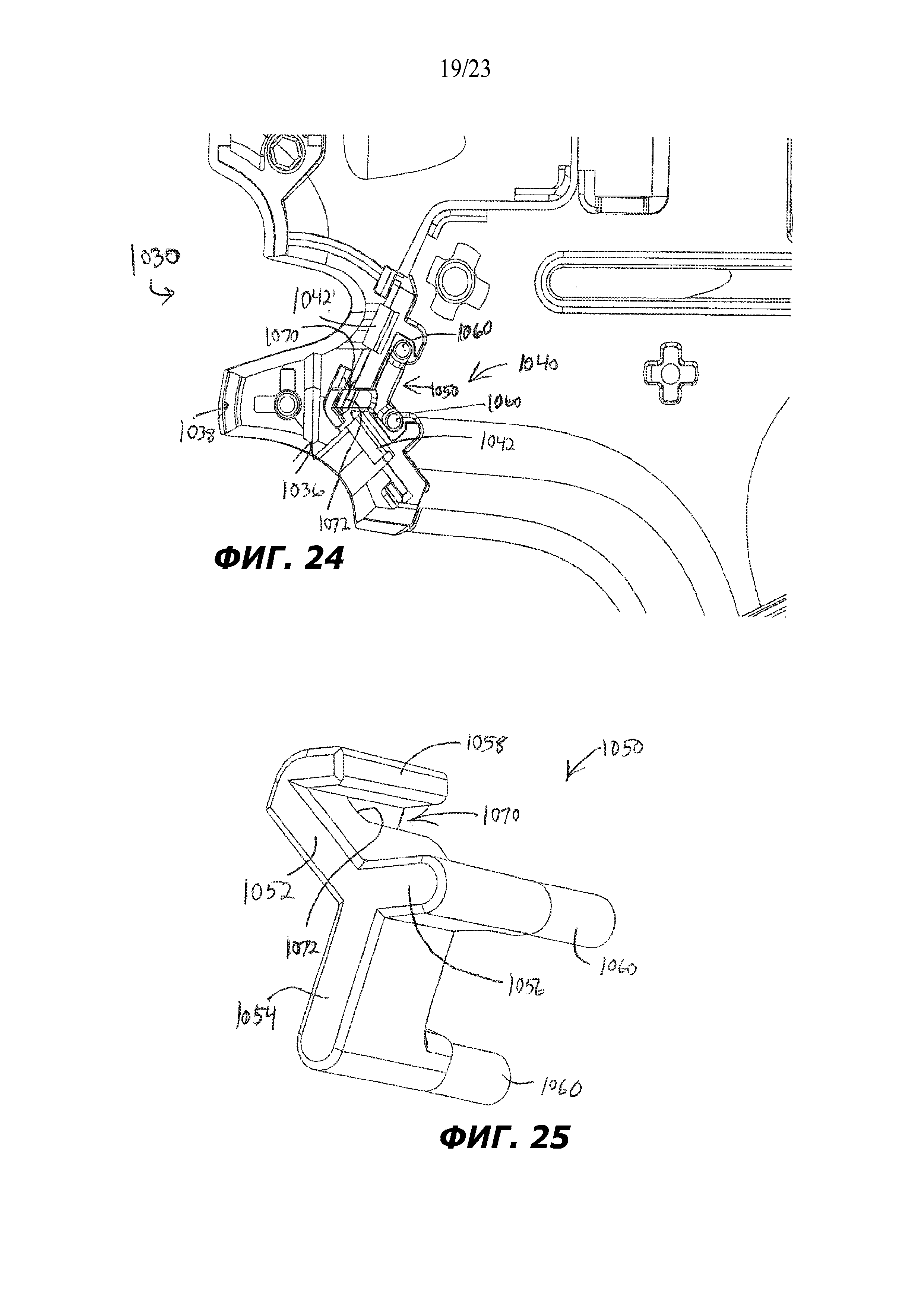
ФИГ. 24 показывает частичную боковую вертикальную проекцию первого покрытия, показанного на ФИГ. 22, совмещенного с примером удерживающего устройства.
ФИГ. 25 показывает в перспективе удерживающее устройство, показанное на ФИГ. 24.
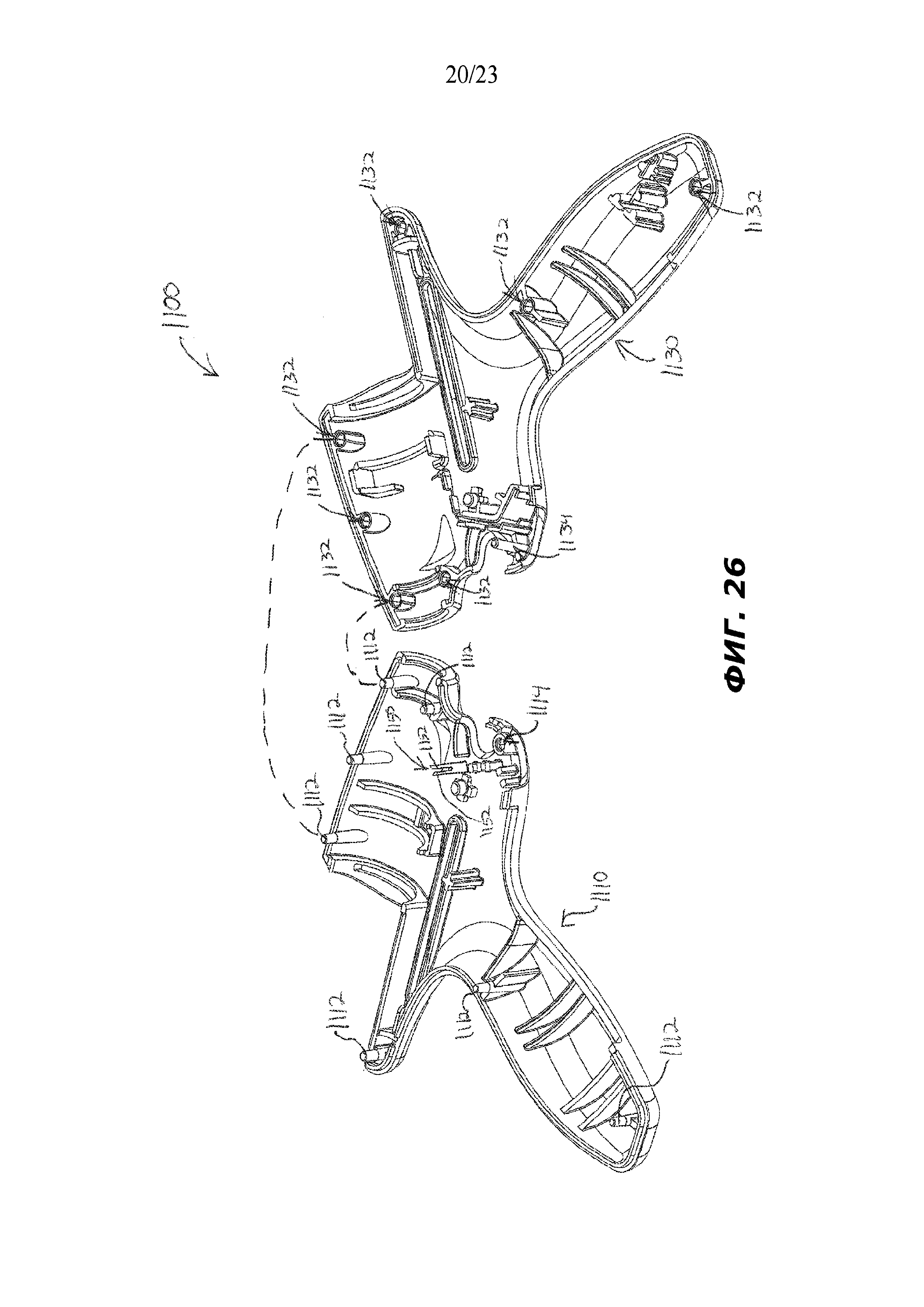
ФИГ. 26 показывает развернутую перспективу примеров альтернативных корпусных компонентов, которые можно включить в инструмент, показанный на ФИГ. 1.
ФИГ. 27 показывает боковую вертикальную проекцию первого примерного корпусного компонента инструмента, показанного на ФИГ. 1, с отверстием, сделанным так, чтобы облегчить отделение от второго корпусного компонента.
ФИГ. 28 показывает боковую вертикальную проекцию второго примерного корпусного компонента инструмента, показанного на ФИГ. 1, с отверстием, сделанным так, чтобы облегчить отделение от первого корпусного компонента.
ФИГ. 29 показывает вид сверху для примера комплекта ультразвукового лезвия, которое можно включить в инструмент, показанный на ФИГ. 1.
ФИГ. 30 показывает поперечный боковой разрез для комплекта лезвия, приведенного на ФИГ. 29, сделанный вдоль линии 30-30 на ФИГ. 29.
ФИГ. 31 показывает частичный вид сверху для примера соединения кабеля питания, при котором одна половина корпуса хирургического инструмента отделена от соединения, а другая половина включена в соединение.
ФИГ. 32 показывает частичный вид сверху для примера соединения кабеля питания, при котором половины корпуса закреплены на соединении.
Чертежи не предназначены для какого-либо ограничения, и предполагается, что различные варианты осуществления технологии можно реализовать другими способами, включая и те, что необязательно изображены на чертежах. Прилагаемые к спецификации чертежи являются ее частью и иллюстрируют несколько аспектов данной технологии и наряду с описанием служат для объяснения ее принципов; при этом понимается, что эта технология не ограничивается конкретными показанными конструкциями.
ПОДРОБНОЕ ОПИСАНИЕ
Следующее описание некоторых примеров осуществления технологии не следует использовать для ограничения ее объема. Другие примеры, свойства, аспекты, варианты осуществления и преимущества технологии станут очевидными для специалистов в данной области из следующего описания, которое является иллюстрацией одного из лучших способов реализации технологии. Как станет понятно, технология, описанная в данном документе, может реализоваться с различными другими очевидными аспектами без отклонения от технологии. Соответственно, чертежи и описания следует рассматривать как иллюстрации, а не ограничения.
Кроме того, принимается, что любые описанные здесь инструкции, выражения, варианты, примеры и т.д. могут комбинироваться с любыми другими описанными здесь инструкциями, выражениями, вариантами, примерами, и т.д. Поэтому не следует рассматривать описанные ниже идеи, выражения, варианты осуществления, примеры и т.д. в отрыве друг от друга. Различные подходящие способы сочетания представленных здесь идей вполне очевидны специалистам в данной области с учетом идей, изложенных в настоящем документе. Предполагается, что объем заявленной формулы изобретения охватывает все такие модификации и варианты.
Для ясности описания термины «проксимальный» и «дистальный» определены в документе относительно человека или робототехнического оператора хирургического инструмента. Термин «проксимальный» означает положение элемента ближе к человеку или роботу, управляющим хирургическим инструментом, удаленное от хирургического концевого рабочего органа хирургического инструмента. Термин «дистальный» означает положение элемента ближе к хирургическому концевому рабочему органу хирургического инструмента, удаленное от человека или робота, управляющих хирургическим инструментом.
I. Пример ультразвукового хирургического инструмента
ФИГ. 1 показывает пример ультразвукового хирургического инструмента (10). По меньшей мере часть инструмента (10) может быть создана и функционировать по меньшей мере с некоторыми идеями патента США № 5322055, патента США № 5873873, патента США № 5980510, патента США № 6325811, патента США № 6773444, патента США № 6783524, публикации США № 2006/0079874, публикации США № 2007/0191713, публикации США № 2007/0282333, публикации США № 2008/0200940, публикации США № 2009/0105750, публикации США № 2010/0069940, публикации США № 2011/0015660, публикации США № 2012/0112687, публикации США № 2012/0116265, заявки на патент США № 13/538588, заявки на патент США № 13/657553 и/или заявки на патент США № 61/410603. Описания каждого из вышеуказанных патентов, публикаций и заявок включены в этот документ путем ссылки. Как описано в указанных документах и как будет подробнее описано ниже, инструмент (10) выполнен с возможностью практически одновременно резать ткани и скреплять ткани (например, кровеносный сосуд и т.д.). Следует также иметь в виду, что у инструмента (10) могут иметься различные признаки структурного и функционального сходства с ультразвуковыми ножницами HARMONIC ACE®, ультразвуковыми ножницами HARMONIC WAVE®, ультразвуковыми ножницами HARMONIC FOCUS® и/или ультразвуковыми лезвиями HARMONIC SYNERGY®. Также у инструмента (10) могут иметься различные структурные и функциональные сходства с устройствами, описанными в любом другом документе, который включен в этот документ путем ссылки.
В той мере, в какой есть некоторая степень совпадения между идеями документов, на которые даны ссылки, ультразвуковыми ножницами HARMONIC ACE®, ультразвуковыми ножницами HARMONIC WAVE®, ультразвуковыми ножницами HARMONIC FOCUS® и/или ультразвуковыми лезвиями HARMONIC SYNERGY®, и следующими идеями в отношении инструмента (10), не следует считать какое-либо из описаний в этом документе признанным уровнем техники. Некоторые из идей в этом документе, по существу, выходят за сферу действия идей приведенных ссылок и ультразвуковых ножниц HARMONIC ACE®, ультразвуковых ножниц HARMONIC WAVE®, ультразвуковых ножниц HARMONIC FOCUS® и ультразвуковых лезвий HARMONIC SYNERGY®.
Инструмент (10) в настоящем примере содержит рукоятку (20), стержень (30) и концевой рабочий орган (40). Рукоятка (20) содержит корпус (22) вместе с пистолетной рукоятью (24) и парой кнопок (26). Рукоятка (20) также включает спусковой крючок (28), выполненный с возможностью поворота вперед и назад от пистолетной рукояти (24). Тем не менее следует понимать, что можно использовать и другие подходящие конфигурации, в том числе конфигурацию ручки-ножниц. Концевой рабочий орган (40) включает ультразвуковое лезвие (100) и отводной зажимной рычаг (44). Зажимной рычаг (44) соединен со спусковым крючком (28) так, что зажимной рычаг (44) выполнен с возможностью поворота в сторону ультразвукового лезвия (100) в ответ на ведение спускового крючка (28) в направлении пистолетной рукояти (24), и так, что зажимной рычаг (44) выполнен с возможностью поворота от ультразвукового лезвия (100) в ответ на ведение спускового крючка (28) в направлении от пистолетной рукояти (24). Различные подходящие способы, которыми можно соединить зажимной рычаг (44) со спусковым крючком (28), будут понятны тем, кто обладает соответствующими навыками технологии в отношении представленных идей. В некоторых вариантах используется один или несколько упругих элементов, чтобы поместить зажимной рычаг (44) и/или спусковой крючок (28) в открытое положение, как показано на ФИГ. 1.
Ультразвуковой преобразователь (12) выдвинут проксимально от корпуса (22) рукоятки (20). Преобразователь (12) соединен с генератором (16) при помощи кабеля (14). Преобразователь (12) получает электрическую энергию от генератора (16) и преобразует энергию в ультразвуковые вибрации при помощи пьезоэлектрических принципов. Генератор (16) может включать источник питания и блок управления, который выполнен с возможностью передачи на преобразователь (12) того профиля мощности, который конкретно подходит для создания ультразвуковых вибраций при помощи преобразователя (12). Только в качестве примера генератор (16) может содержать GEN 300, продаваемый компанией Ethicon Endo-Surgery, Inc., Цинциннати, Огайо. В дополнение или в качестве альтернативы генератор (16) может быть произведен в соответствии по меньшей мере с некоторыми идеями публикации США № 2011/0087212 под названием «Хирургический генератор для ультразвуковых и электрохирургических устройств» от 14 апреля 2011 года, описание которой включено в этот документ путем ссылки. Следует также иметь в виду, что по меньшей мере некоторые из функций генератора (16) могут быть включены в рукоятку (20) и что рукоятка (20) может даже включать батарею или другой бортовой источник питания, при котором кабель (14) не требуется. Генератор (16) может иметь другие подходящие формы, а также обеспечивать различные свойства и функции, что будет ясно для владеющих соответствующими навыками технологии в отношении представленных идей.
Ультразвуковые вибрации, которые создает преобразователь (12), передаются по акустическому волноводу (150) (показан на ФИГ. 11, 12), который проходит через стержень (30), попадая на ультразвуковое лезвие (100). Лезвие (100), таким образом, способно успешно резать и скреплять ткани, в частности, когда ткань зафиксирована между зажимом (44) и лезвием (100). Следует понимать, что волновод (150) может быть выполнен с возможностью усиления механических вибраций, передаваемых по волноводу (150). Также волновод (150) может включать приспособления, используемые для управления усилением продольных вибраций вдоль волновода (150) и/или приспособления для настройки волновода (150) на резонансную частоту системы. Кнопки (26) используются для избирательной активации преобразователя (12), что запускает ультразвуковое лезвие (100). В этом примере представлены две кнопки (26): одна для активации ультразвукового лезвия (100) на малой мощности, другая для активации ультразвукового лезвия (100) на большой мощности. Тем не менее, следует понимать, что может быть представлено другое подходящее число кнопок и/или иначе регулируемый уровень мощности.
В этом примере дистальный конец ультразвукового лезвия (100) находится в положении, соответствующем пучности резонансной ультразвуковой вибрации, передаваемой по волноводу, чтобы настраивать акустический блок на предпочтительную резонансную частоту fo, когда акустический блок не нагружен тканью. Когда преобразователь (12) находится под напряжением, дистальный конец ультразвукового лезвия (100) выполнен с возможностью перемещения продольно в диапазоне, например, от около 10 до 500 микрон от пика к пику и в некоторых случаях в диапазоне от около 20 до 200 микрон с предустановленной частотой вибрации fo, например 55,5 кГц. Когда преобразователь (12), упомянутый в этом примере, запущен, эти механические колебания передаются по волноводу, достигая ультразвукового лезвия (100), тем самым обеспечивая колебание ультразвукового лезвия (100) с резонансной ультразвуковой частотой. Таким образом, когда ткань зафиксирована между ультразвуковым лезвием (100) и зажимом (44), ультразвуковое колебание ультразвукового лезвия (100) может одновременно отделять ткань и денатурировать белки в прилегающих клетках ткани, тем самым обеспечивая коагулирующий эффект с относительно небольшим распространением тепла. Когда преобразователь (12) и ультразвуковое лезвие (100) не находятся под напряжением, зажим (44) можно поворачивать относительно ультразвукового лезвия (100), чтобы захватывать ткань и манипулировать ею без ее разрезания или повреждения.
В некоторых вариантах электрический ток можно проводить по ультразвуковому лезвию (100) и зажиму (44), чтобы дополнительно прижигать ткань. Несмотря на то, что были описаны некоторые конфигурации для блока акустической передачи и преобразователя (12), другие подходящие конфигурации для блока акустической передачи и преобразователя (12) будут очевидны для тех, кто обладает соответствующими навыками технологии в отношении представленных идей. Аналогично другие подходящие конфигурации для концевого рабочего органа (40) будут очевидны для тех, кто обладает соответствующими навыками технологии в отношении представленных идей.
В этом примере стержень (30) выполнен с возможностью избирательного подключения к преобразователю (12). Чтобы помочь с правильным соединением, моментный ключ (не показан) может быть встроен рядом со стержнем (30). Такой моментный ключ может быть выполнен с возможностью облегчения захвата стержня (30), когда стержень (30) вращается относительно преобразователя (12) при соединении. Также такой моментный ключ может быть выполнен с возможностью обеспечения звуковой и/или тактильной обратной связи, когда будет достигнут крутящий момент, достаточный для того, чтобы соединить преобразователь (12) и стержень (30) с нужным усилием. Например, моментный ключ может издать пару звуковых и тактильных щелчков, когда будет достигнут нужный уровень крутящего момента или усилия. Другие варианты моментного ключа будут очевидны для тех, кто обладает соответствующими навыками технологии в отношении представленных идей. Также следует понимать, что моментный ключ может не включаться в комплект, если этого не требуется.
В некоторых вариантах стержень (30) включает шарнирную часть, позволяющую концевому рабочему органу (40) изгибаться под углом вбок от продольных осей, задаваемых положением стержня (30). Только в качестве примера такая шарнирная часть может быть изготовлена в соответствии с одной или несколькими идеями публикации США № 2012/0078247, описание которой включено в этот документ путем ссылки. Только в качестве показательного примера такая шарнирная часть может быть изготовлена в соответствии с одной или несколькими идеями заявки на патент США № 13/538,588 и/или заявки на патент США № 13/657,553, описания которых включены в этот документ путем ссылки. Конечно, в некоторых вариантах стержня (30) может вообще не быть шарнира. Стержень (30) в этом примере включает ручку (32), которая выполнена с возможностью вращения стержня (30) и концевого рабочего органа (40) относительно рукоятки (20) по продольной оси стержня (30). Тем не менее, следует понимать, что ручка (32) и возможность вращения стержня (30) представлены на усмотрение.
Вышеуказанные компоненты и функции инструмента (10) представлены лишь в качестве примера. Инструмент (10) может быть произведен многими другими способами, которые будут очевидны для тех, кто обладает соответствующими навыками технологии в отношении представленных идей. Только в качестве примера по меньшей мере часть инструмента (10) может быть изготовлена и/или может функционировать в соответствии по меньшей мере с некоторыми идеями следующих документов, описания которых включены в этот документ путем ссылки: патента США № 5322055 патента США № 5873873, патента США № 5980510, патента США № 6325811, патента США № 6773444, патента США № 6783524, публикации США № 2006/0079874, публикации США № 2007/0191713, публикации США № 2007/0282333, публикации США № 2008/0200940, публикации США № 2009/0105750, публикации США № 2010/0069940, публикации США № 2011/0015660, публикации США № 2012/0112687, публикации США № 2012/0116265, заявки на патент США № 13/538588, заявки на патент США № 13/657553 и/или заявки на патент США № 61/410603. Дополнительные варианты инструмента (10) будут подробнее описаны ниже. Следует понимать, что описанные ниже варианты могут уже применяться к каким-либо инструментам, на которые даны ссылки в этом документе, помимо прочих.
II. Пример конфигурации ультразвукового лезвия
ФИГ. 2-9 показывают ультразвуковое лезвие (100) инструмента (10) в деталях. Ультразвуковое лезвие (100) в этом примере имеет форму сужающегося многофункционального изогнутого лезвия с функциональной асимметрией и минимальной возможностью нежелательных движений. Следует понимать, что создание изогнутого варианта ультразвукового лезвия (100) требует ряда инженерных решений, которые нужно будет предусмотреть. Например, может потребоваться правильная балансировка изогнутого ультразвукового лезвия (100), включая точное расположение массы вдоль концевого рабочего органа (40). Другой аспект правильной балансировки может включать желание отдельно балансировать ортогональные сдвиги, возникающие у запущенного ультразвукового лезвия (100), которые могут представлять особую проблему, если лезвие (100) изогнуто. Также изогнутое ультразвуковое лезвие (100) может сломаться из-за большого напряжения в гнутой области лезвия (100), особенно если лезвие (100) контактирует с металлом, находясь в активированном состоянии. Также изогнутое ультразвуковое лезвие (100) может обладать относительно меньшей активной длиной, что в свою очередь может ограничить размер сосуда (иди другой тканевой структуры), выполненный с возможностью оперирования лезвием (100). («Активную длину» можно определить как длину от дистального конца (102) лезвия (100) до места, где смещение составляет половину смещения на его дистальном конце (102).) Лезвие (100) в этом примере учитывает вышеизложенные соображения.
Рассмотрев вышеуказанные инженерные решения, следует также иметь в виду, что изогнутая и сужающаяся конфигурация лезвия (100) может представлять такие хирургические преимущества, как улучшенная видимость для хирурга. Также изогнутая и коническая форма в совокупности могут обеспечивать большую активную длину за счет повышенной скорости звука и прогрессивного уменьшения массы. Также коническая форма может привести к уменьшению поверхности на дистальном конце (102), что может улучшить функцию прокола или рассечения, повысив местное давление, оказываемое на ткани. Надежное функционирование можно улучшить, регулируя соотношение акустического напряжения и напряжения изгиба в выступающей части лезвия (100). Лезвие (100), таким образом, может быть менее чувствительно к повреждениям от случайного контакта с другим металлическим материалом и может служить дольше.
Лезвие (100) в этом примере расположено на дистальном конце волновода (150). Проксимальный конец волновода (150) соединен с преобразователем (12). Таким образом, лезвие (100) и волновод (150) вместе определяют блок акустической передачи, который акустически соединен с преобразователем (12). Только в качестве примера этот блок акустической передачи может быть примерно 36 см в длину, примерно 23 см в длину или другой соответствующей длины. В этом примере дистальный конец (102) ультразвукового лезвия (42) находится в положении, соответствующем пучности, связанной с резонансной ультразвуковой вибрацией, передаваемой по волноводу (150), чтобы настраивать блок акустической передачи на предпочтительную резонансную частоту fo, когда блок акустической передачи не нагружен тканью. Лезвие (100) и волновод (150) объединены в этом примере, хотя лезвие (100) и волновод (150) могут в качестве альтернативы быть отдельными частями, соединенными друг с другом (например, при помощи резьбовой муфты, прессовой посадки, сварного соединения и т.д.). Можно считать, что лезвие (100) практически заканчивается проксимально в наиболее дистальном узле, соответствующем резонансной ультразвуковой вибрации, передаваемой по волноводу (150). Другими словами, лезвие (100) проходит от наиболее дистального узла до наиболее дистальной пучности.
Когда преобразователь (12) находится под напряжением, дистальный конец (102) ультразвукового лезвия (100) выполнен с возможностью перемещения продольно (вдоль оси x) в диапазоне, например, от около 10 до 500 микрон от пика к пику и в некоторых случаях в диапазоне от около 20 до около 200 микрон с предустановленной частотой вибрации fo, например 55,5 кГц. Когда преобразователь (12) в этом примере запущен, эти механические колебания передаются по волноводу (150), достигая ультразвукового лезвия (100), тем самым обеспечивая колебание ультразвукового лезвия (100) с резонансной ультразвуковой частотой. Таким образом, когда ткань зафиксирована между ультразвуковым лезвием (100) и зажимом (44), ультразвуковое колебание ультразвукового лезвия (100) может одновременно отделять ткань и денатурировать белки в прилегающих клетках ткани, тем самым обеспечивая коагулирующий эффект с относительно небольшим распространением тепла.
Лезвие (100) в этом примере сужается от проксимального конца к дистальному (102). Лезвие (100) в том числе изогнуто так, чтобы центр дистального конца (102) располагался боком к продольной оси, установленной волноводом (150). Следует понимать, что могут потребоваться некоторые элементы для балансировки, чтобы поддерживать достаточное продольное движение вдоль оси x и в плоскости x-y и также чтобы отделять диапазоны поперечных колебаний вибрации от нужного продольного режима вибрации с резонансной частотой в 55,5 кГц. Как будет подробнее описано ниже, волновод (150) включает последовательность шагов передачи, которые выполнены с возможностью обеспечения усиления примерно в 3,5 раза, так чтобы дистальный конец (102) лезвия (100) вибрировал вдоль оси x с максимальной амплитудой около 73,5 микрона при максимальной выработке энергии (то есть амплитуда преобразователя (150) составляет около 21,5 микрона).
Кончик лезвия (100) лучше всего виден на ФИГ. 7-9, где показан ряд поперечных сечений в разных местах вдоль длины лезвия (100). В частности, ФИГ. 7 показывает проксимальный поперечный разрез лезвия (100) вдоль плоскости, идущей по оси (PA), которая перпендикулярна продольной оси волновода (150). ФИГ. 8 показывает промежуточный поперечный разрез лезвия (100) вдоль первой плоскости, которая наклонена к оси (PA). ФИГ. 9 показывает дистальный поперечный разрез лезвия (100) вдоль второй плоскости, которая наклонена к оси (PA). В этом примере ширина лезвия (100) на поперечном разрезе, показанном на ФИГ. 7, составляет между примерно 0,14 см (0,055 дюйма) и примерно 0,18 см (0,070 дюйма), а более конкретно между примерно 0,15 см (0,060 дюйма) и примерно 0,17 см (0,065 дюйма). Ширина лезвия (100) на поперечном разрезе, показанном на ФИГ. 8, составляет между примерно 0,11 см (0,045 дюйма) и примерно 0,15 см (0,060 дюйма), а более конкретно между примерно 0,13 см (0,050 дюйма) и примерно 0,14 см (0,055 дюйма). Ширина лезвия (100) на поперечном разрезе, показанном на ФИГ. 9, составляет примерно между 0,089 и 0,127 см (примерно между 0,035 и 0,050 дюйма), а более конкретно примерно между 0,10 см (0,040 дюйма) и 0,11 см (0,045 дюйма). Конечно, могут использоваться любые другие подходящие размеры.
Изгибы и коническое лезвие (100) определяются простыми радиальными разрезами, а также более сложными составными радиальными разрезами, которые делаются в базовом изогнутом цилиндре. Эти разрезы определяют множество элементов для балансировки (110, 112, 114, 120). В частности, и как лучше всего видно на ФИГ. 4, первый такой элемент для балансировки (110) образовано латеральным вогнутым разрезом с первым радиусом изгиба (R1). Только в качестве примера первый радиус изгиба (R1) может быть между примерно 0,508 см (0,200 дюйма) и примерно 0,635 см (0,250 дюйма), а более конкретно примерно 0,572 см (0,225 дюйма). Конечно, для первого радиуса изгиба (R1) могут использоваться любые другие подходящие значения. В этом примере первое приспособление для балансировки (110) определяется первым радиусом изгиба (R1), проходящим вдоль ортогональной плоскости x-y, идущей через продольную ось стержня (30). Второе приспособление для балансировки (112) образовано латеральным вогнутым разрезом со вторым радиусом изгиба (R2), проходящим вдоль ортогональной плоскости x-y, которая проходит через продольную ось стержня (30). Только в качестве примера второй радиус изгиба (R2) может быть между примерно 0,635 см (0,250 дюйма) и примерно 0,699 см (0,275 дюйма), а более конкретно примерно 0,681 см (0,268 дюйма). Конечно, для второго радиуса изгиба (R2) могут использоваться любые другие подходящие значения. В этом примере второе приспособление для балансировки (112) смещено относительно первого такого приспособления (110) вдоль длины лезвия (100). В частности, второе приспособление для балансировки (112) удалено дистально от первого такого приспособления (110) примерно на 0,005 см (0,002 дюйма) и примерно на 0,025 см (0,010 дюйма), а более конкретно примерно на 0,013 см (0,005 дюйма). В качестве альтернативы может использоваться любое другое подходящее расстояние (или смещения может не быть). В этом примере второе приспособление для балансировки (112) определяется вторым радиусом изгиба (R2), проходящим вдоль той же ортогональной плоскости x-y, которая идет через продольную ось стержня (30), что и ортогональная плоскость x-y, соответствующая первому приспособлению для балансировки (110) и первому радиусу изгиба (R1).
Третье приспособление для балансировки (114) проходит по окружности около лезвия (100) и образовано вогнутым разрезом с третьим радиусом изгиба (R3). Только в качестве примера третий радиус изгиба (R3) может составлять между примерно 1,52 см (0,600 дюйма) и примерно 1,78 см (0,700 дюйма), а более конкретно примерно 1,7 см (0,650 дюйма). Конечно, может использоваться любое другое подходящее значение для третьего радиуса изгиба (R3).
Четвертое приспособление для балансировки (120) лучше всего видно на ФИГ. 4 и 7, 8. Четвертое приспособление для балансировки (120) образовано как продольная двояковыпуклая выемка в одном углу лезвия (100). Выемка приспособления для балансировки (120) определена четвертым радиусом изгиба (R4), идущим вдоль плоскости x-y, и пятым радиусом изгиба (R5), идущим вдоль плоскости y-z. Только в качестве примера четвертый радиус изгиба (R4) может составлять между примерно 3,43 см (1,350 дюйма) и примерно 3,620 см (1,425 дюйма), а более конкретно примерно 3,543 см (1,395 дюйма). В качестве альтернативы может использоваться любое другое подходящее значение для четвертого радиуса изгиба (R4). В этом примере плоскость x-y, вдоль которой идет четвертый радиус изгиба (R4), параллельна плоскости x-y, вдоль которой проходят первый и второй радиусы изгиба (R1, R2), и находится на некотором расстоянии от нее. Также лишь в качестве примера пятый радиус изгиба (R5) может составлять между примерно 0,15 см (0,060 дюйма) и примерно 0,17 см (0,065 дюйма), а более конкретно примерно 0,16 см (0,062 дюйма). В качестве альтернативы может использоваться любое другое подходящее значение для пятого радиуса изгиба (R5). Четвертое приспособление для балансировки (120) может быть выполнено с возможностью уравновешивания движения лезвия (100), как описано в патенте США № 6,773,444, описание которого включено в этот документ путем ссылки. Также четвертое приспособление для балансировки (120) представляет собой край (122), выполненный с возможностью использования для подрезания ткани и/или с другой целью. В некоторых вариантах инструмента (10), где есть зажим (44), ультразвуковое лезвие (100) расположено так, что край (122) направлен в сторону зажима (44). В некоторых других вариантах инструмента (10), где есть зажим (44), ультразвуковое лезвие (100) расположено так, что край (122) направлен в сторону от зажима (44).
Как можно видеть на ФИГ. 4, латеральный вогнутый разрез второго приспособления для балансировки (112) переходит в выпуклый изгиб, проходящий к дистальному концу (102). Этот выпуклый изгиб определен как шестой радиус изгиба (R6), идущий вдоль ортогональной плоскости x-y, которая проходит через продольную ось стержня (30). Только в качестве примера шестой радиус изгиба (R6) может составлять примерно 3,673 см (1,446 дюйма). Конечно, для шестого радиуса изгиба (R6) может использоваться любое другое подходящее значение.
ФИГ. 10 показывает пример альтернативного ультразвукового лезвия (200), которое может располагаться на дистальном конце волновода (150). Лезвие (200) в этом примере в значительной мере аналогично лезвию (100), описанному выше, и включает дистальный конец (202) и множество приспособлений для балансировки (210, 212, 214, 220). В некоторых вариантах лезвие (100) составляет примерно 36 сантиметров в длину, в то время как лезвие (200) составляет примерно 23 сантиметра в длину. Конечно, могут использоваться любые другие подходящие размеры. Разницу в радиусах изгиба, соответствующих лезвию (200), можно выбрать для определения лезвия (200), имеющего более короткую длину, чем лезвие (100).
На примере, показанном на ФИГ. 10, элементы для балансировки (210, 212) лезвия (200) в значительной мере совпадают с соответствующими приспособлениями для балансировки (110, 112) лезвия (100), в том числе имеющими те же радиусы изгиба, что приспособления для балансировки (110, 112). Несмотря на то, что приспособление для балансировки (220) лезвия (200) также аналогично приспособлению для балансировки (120) лезвия (100), приспособление для балансировки (220) определено радиусами изгиба (R7, R8), которые отличаются от соответствующих радиусов изгиба (R4, R5), определяющих приспособление для балансировки (120). В частности, выемка приспособления для балансировки (220) определена седьмым радиусом изгиба (R7), идущим вдоль плоскости x-y, и восьмым радиусом изгиба (R8), идущим вдоль плоскости y-z. Только в качестве примера седьмой радиус изгиба (R7) может составлять между примерно 3,531 см (1,390 дюйма) и примерно 3,8 см (1,500 дюйма), а более конкретно примерно 3,607 см (1,420 дюйма). В некоторых других вариантах седьмой радиус изгиба (R7) составляет примерно 3,543 см (1,395 дюйма). В качестве альтернативы может использоваться любое другое подходящее значение для седьмого радиуса изгиба (R7). Также лишь в качестве примера восьмой радиус изгиба (R8) может составлять между примерно 2,54 см (1,000 дюйма) и примерно 3,048 см (1,200 дюйма), а более конкретно примерно 2,794 см (1,100 дюйма). В некоторых других вариантах восьмой радиус изгиба (R8) составляет примерно 3,543 см (1,395 дюйма). В качестве альтернативы может использоваться любое другое подходящее значение для восьмого радиуса изгиба (R8).
Лезвие (200) на ФИГ. 10 также имеет проходящее по окружности приспособление для балансировки (214), определяемое девятым радиусом изгиба (R9), который составляет примерно 3,81 см (1,500 дюйма). В качестве альтернативы может использоваться любое другое подходящее значение для девятого радиуса изгиба (R9). Латеральный вогнутый разрез приспособления для балансировки (212) проходит в выпуклый изгиб, идущий к дистальному концу (202). Этот выпуклый изгиб определен десятым радиусом изгиба (R10), идущим вдоль ортогональной плоскости x-y, которая проходит через продольную ось стержня (30). Только в качестве примера десятый радиус изгиба (R10) может составлять примерно 3,543 см (1,395 дюйма). Конечно, для десятого радиуса изгиба (R10) может использоваться любое другое подходящее значение. Как указано выше, в некоторых случаях ультразвуковое лезвие длиной примерно 36 см может быть изготовлено в соответствии с описанием лезвия (100), в то время как ультразвуковое лезвие длиной примерно 23 см может быть изготовлено в соответствии с описанием лезвия (200). В качестве альтернативы конфигурация любого из лезвий (100, 200) может сочетаться с любой другой подходящей длиной ультразвукового лезвия.
ФИГ. 11, 12 подробно показывают волновод (150) в этом примере. Волновод (150) может быть гибким, полужестким или жестким. Волновод (150) также может быть выполнен с возможностью усиления механических вибраций, передаваемых по волноводу (150) к лезвию (100), как хорошо известно в технологии. Волновод (150) дополнительно может иметь приспособления для управления нарастанием продольной вибрации вдоль волновода (150) и приспособления для настройки волновода (150) на резонансную частоту системы. В частности, волновод (150) может иметь любой подходящий поперечный размер. Например, волновод (150) может быть сужающимся в разных сечениях, чтобы управлять нарастанием продольной вибрации. Волновод (150) может, например, иметь длину, почти равную целому числу половины длин волн системы (nλ/2). Волновод (150) и лезвие (100) могут быть по запросу изготовлены из стержня с твердой сердцевиной, сделанного из материала, который эффективно передает ультразвуковую энергию, такого как титановый сплав (например, Ti-6Al-4V), алюминиевый сплав, сапфир, нержавеющая сталь, или любого другого акустически совместимого материала. Волновод (150) также может дополнительно включать по меньшей мере одно радиальное отверстие или апертуру (не показано), проходящие сквозь него в значительной мере перпендикулярно продольной оси волновода (150). Такое отверстие может располагаться на узле. Проксимальное уплотнительное кольцо (не показано) и дистальное уплотнительное кольцо (130) (см. ФИГ. 2-6) собраны в блоке акустической передачи вблизи ультразвуковых узлов волновода (150), как известно в данной области.
Как дополнительно показано на ФИГ. 11, 12, в волноводе (150) дополнительно имеются приспособления для балансировки (160). Приспособления для балансировки (160) имеют форму плоских поверхностей, расположенных по бокам волновода (150), который в целом имеет цилиндрическую форму. Приспособления для балансировки (160) служат для расширения диапазона поперечных волн относительно предпочтительных продольных волн в обоих направлениях от резонансной частоты (например, 55,5 кГц). В некоторых моделях приспособления для балансировки (160) находятся в 180° друг от друга на корпусе волновода (150) и имеют примерную длину от 6,604 см (2,600 дюйма) до 7,112 см (2,800 дюйма), а конкретнее примерно 6,858 см (2,700 дюйма). Осевая линия приспособлений для балансировки (160) составляет примерно от 17,78 до 18,29 см (от 7000 до 7200 дюймов), а конкретнее примерно 18,16 см (7,148 дюйма). Кроме того, могут быть использованы компоненты любых других подходящих размеров.
III. Типовые схемы управления
В некоторых случаях инструмент (10) может включать в себя ножную педаль (не используется), которая служит выборочным переключателем для включения преобразователя (12) и ультразвукового ножа (100). Кроме того, оператор может использовать в качестве переключателей кнопки (26), чтобы выборочно включать преобразователь (12) и ультразвуковой нож (100). Однако в некоторых таких случаях может присутствовать значительная изменчивость в сопротивлении кабеля (14) и/или в сопротивлении контактов в электрической схеме между генератором (16) и кнопками (26). Такое переменное сопротивление может затруднить распознавание генератором (16) состояния замыкания переключателей (например, когда нажаты кнопки (26)). Изменчивость сопротивления может быть связана с веществами, оставшимися на контактах в блоке рукоятки (20) в результате процесса чистки, и/или с другими факторами. Некоторые варианты электросхем могут быть значительно менее чувствительны к таким рискам. Например, некоторые варианты электросхем способны эффективно обнулять воздействие переменного сопротивления в режиме реального времени. Различные примеры таких электросхем более подробно описываются ниже, в то время как другие примеры будут очевидны специалистам в данной области в свете изложенных здесь идей.
В некоторых вариантах генератор (16) содержит генератор GEN11, который производит и реализует компания Ethicon Endo-Surgery, Inc. Генератор (16) может выступать в качестве источника постоянного тока (примерно +/-16 мА, чередуя напряжение при низкой частоте - около 500 Гц) и определять состояние переключателей (замкнут или разомкнут) в блоке рукоятки (20) путем измерения падения напряжения в цепи ручного выключателя на фронтальной части генератора (16). Такое падение напряжения может включать неизвестное падение напряжения, вызванное сопротивлением в кабеле (14) и/или сопротивлением в контактах в блоке рукоятки (20), которое может меняться с течением времени из-за таких факторов, как вращение инструмента и изменения в усилии контакта при использовании инструмента и т.д. Примеры, описанные ниже, позволяют генератору (16) определить и выделить такое неизвестное падение напряжения путем измерения известного опорного компонента в блоке рукоятки (20), из-за которого происходит известное падение напряжения, в непосредственной временной близости к измерению состояния переключателей.
На ФИГ. 13 изображена одна типовая электросхема (200), которая может быть встроена в инструмент (10) для учета колебаний сопротивления, как описано выше. Цепь (200) включает в себя эталонный резистор (210) и ЭСППЗУ (212), которые вместе обеспечивают эталонные параметры на положительном плече цепи (200). Эти эталонные параметры, полученные благодаря эталонному резистору (210) и ЭСППЗУ (212), дают показания во время положительного полупериода запросного сигнала от генератора (16). Следует понимать, что ЭСППЗУ (212) потребляет так мало тока, что само ЭСППЗУ (212) заметно не повлияет на падение напряжения, вызванное эталонным резистором (210). Цепь (200) также включает в себя набор переключателей (220), соответствующие резисторы (222) и пару диодов (224). Переключатели (220) приводятся в действие с помощью кнопок (26), спускового крючка (28) и/или других подвижных компонентов в блоке рукоятки (20). Переключатели (220), резисторы (222) и диоды (224) расположены на отрицательном плече цепи (200). Переключатели (220), резисторы (222) и диоды (224), таким образом, дают показания во время отрицательного полупериода запросного сигнала от генератора (16). Генератор (16) выполнен с возможностью для определения и выделения падения напряжения в переключателях (220), резисторах (222) и диодах (224) на основе известного падения напряжения в эталонном резисторе (210) в непосредственной временной близости к измерению состояния переключателей (220).
На ФИГ. 14 показана еще одна типовая электросхема (300), которая может быть встроена в инструмент (10) для учета колебаний сопротивления, как описано выше. Цепь (300) включает в себя эталонный диод (310) и ЭСППЗУ (312), которые вместе обеспечивают эталонные параметры на положительном плече цепи (300). Эти эталонные параметры, полученные благодаря эталонному диоду (310) и ЭСППЗУ (312), дают показания во время положительного полупериода запросного сигнала от генератора (16). Следует понимать, что ЭСППЗУ (312) потребляет так мало тока, что само ЭСППЗУ (312) заметно не повлияет на падение напряжения, вызванное эталонным диодом (310). Цепь (300) также включает в себя набор переключателей (320), соответствующие диоды (322) и дополнительную пару диодов (324). Переключатели (320) приводятся в действие с помощью кнопок (26), спускового крючка (28) и/или других подвижных компонентов рукоятки в сборе (20). Переключатели (320) и диоды (322, 324) расположены на отрицательном плече цепи (300). Таким образом, переключатели (320) и диоды (322, 324) дают показания во время отрицательного полупериода запросного сигнала от генератора (16). Генератор (16) выполнен с возможностью для определения и выделения падения напряжения в переключателях (320) и диодах (322, 324) на основе известного падения напряжения в эталонном диоде (310) в непосредственной временной близости к измерению состояния переключателей (320).
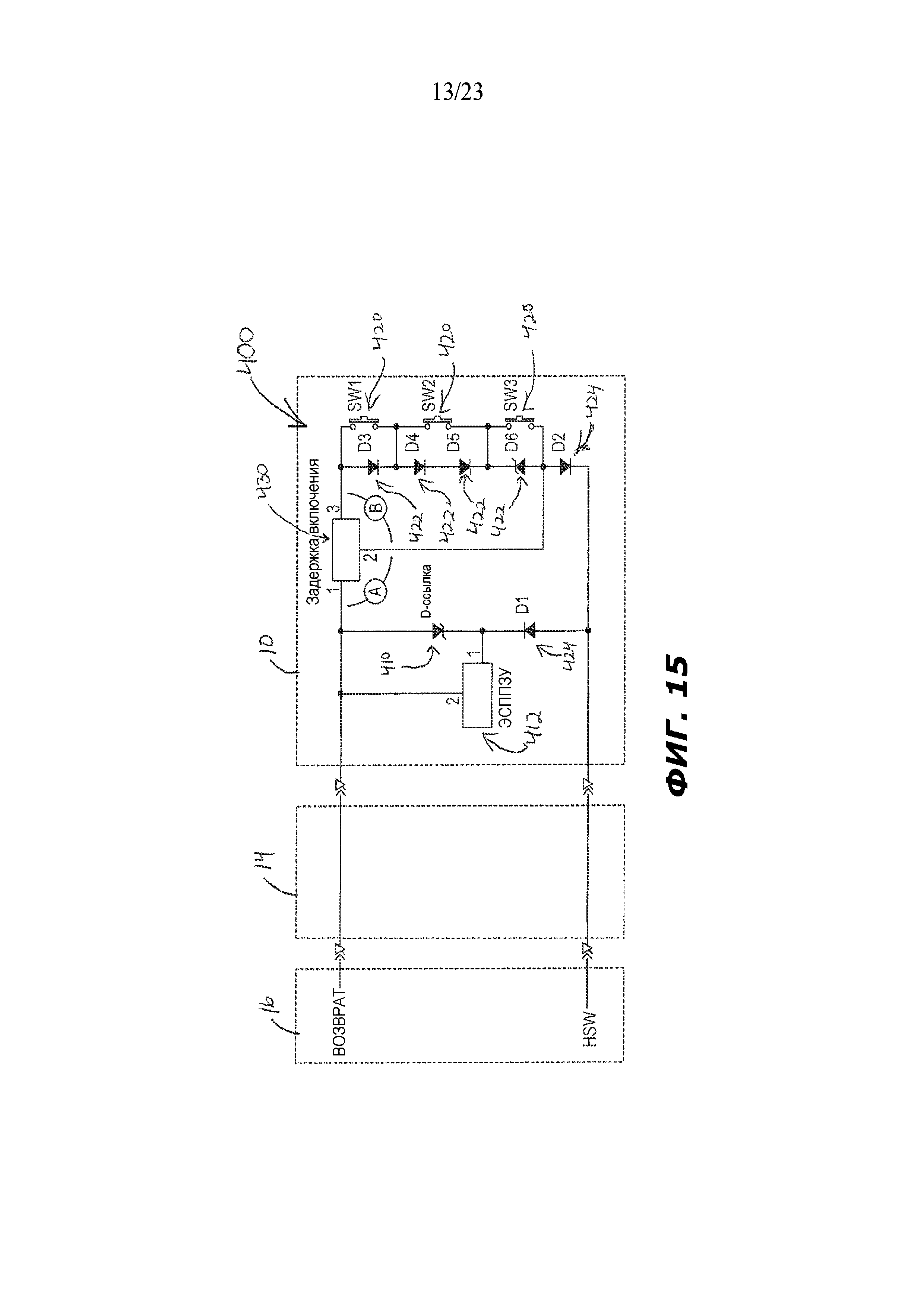
На ФИГ. 15 показана еще одна типовая электросхема (400), которая может быть встроена в инструмент (10) для учета колебаний сопротивления, как описано выше. Цепь (400), по существу, аналогична цепи (300), описанной выше, в том, что эта цепь (400) включает в себя опорный диод (410), ЭСППЗУ (412), переключатели (420) и диоды (422, 424), которые расположены аналогично расположению эталонного диода (310), ЭСППЗУ (312), переключателей (320) и диодов (322, 324) в цепи (300). В отличие от цепи (300) цепь (400) в данном примере дополнительно включает в себя схему задержки включения (430). Схема задержки включения (430) настроена приблизительно на ¼ части цикла запросного сигнала генератора (16), так что генератор (16) видит эталонные параметры (т.е. эталонный диод (410) и ЭСППЗУ (412)) только в течение первой половины отрицательного полупериода, а затем видит переключатели (420) и диоды (422, 424) параллельно с эталонными параметрами во второй половине отрицательного полупериода. В некоторых версиях схема задержки включения (430) может включать в себя формирователь импульса Maxim MAX6895 с полевым транзистором Philips PMV65XP с каналом р-типа. Другие подходящие конфигурации схемы задержки включения (430) будут очевидны специалистам в данной области в свете излагаемых здесь идей.
На ФИГ. 16 показана еще одна типовая электросхема (500), которая может быть встроена в инструмент (10) для учета различий в сопротивлении, как описано выше. Цепь (500), по существу, аналогична цепи (200), описанной выше, в том, что цепь (200) включает в себя эталонный резистор (510), ЭСППЗУ (512), переключатели (520), резисторы (522) и диоды (524), которые расположены аналогично расположению эталонного резистора (210), ЭСППЗУ (212), переключателей (220), резисторов (222) и диодов (224) в цепи (200). В отличие от электросхемы (200) схема (500) в данном примере дополнительно включает в себя схему задержки включения (530). Схема задержки включения (530) настроена приблизительно на ¼ части цикла запросного сигнала генератора (16), так что генератор (16) видит только эталонные параметры (т.е. эталонный резистор (510) и ЭСППЗУ (512)) в течение первой половины отрицательного полупериода, а затем видит переключатели (520), резисторы (522) и диоды (524) параллельно с эталонными параметрами во второй половине отрицательного полупериода. В некоторых версиях схема задержки включения (530) может включать в себя формирователь импульса Maxim MAX6895 с полевым транзистором Philips PMV65XP с каналом p-типа. Другие подходящие конфигурации схемы задержки включения (530) будут очевидны специалистам в данной области в свете излагаемых здесь идей.
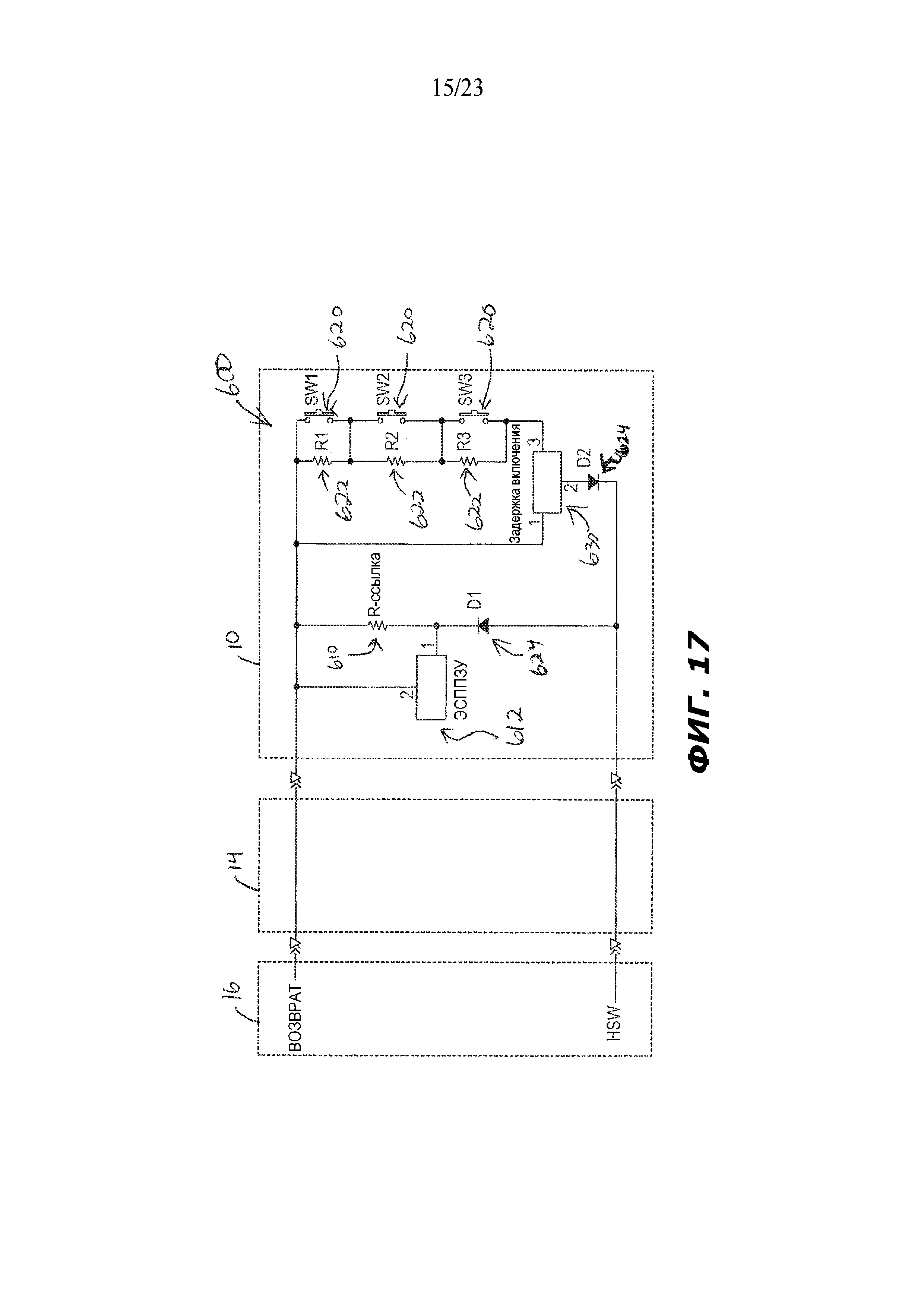
На ФИГ. 17 показана еще одна типовая электросхема (600), которая может быть встроена в инструмент (10) для учета различий в сопротивлении, как описано выше. Цепь (600), по существу, аналогична цепи (500), описанной выше, в том, что эта цепь (600) включает в себя эталонный резистор (610), ЭСППЗУ (612), переключатели (620), резисторы (622) и диоды (624), которые расположены аналогично расположению эталонного резистора (510), ЭСППЗУ (512), переключателей (520), резисторов (522) и диодов (524) в цепи (500). Цепь (600) также включает в себя схему задержки включения (630), которая может быть сконфигурирована и может функционировать так же, как схема задержки включения (530), описанная выше. Однако в этом примере схема задержки включения (630) встроена в противоположный конец цепной схемы переключателя (620). Такое позиционирование схемы задержки включения (630) может позволить использование выходного каскада, который задействует полевой транзистор с каналом n-типа или интегральную схему с открытым стоком (например, низковольтный таймер типа 555 - Zetex ZSCT1555).
На ФИГ. 18 показаны примерные входные и выходные сигналы напряжения схем задержки включения (430, 530, 630). В частности, сигнал А представляет собой входной сигнал для схемы задержки включения (430, 530, 630), в то время как сигнал В - это выходной сигнал для схемы задержки включения (430, 530, 630).
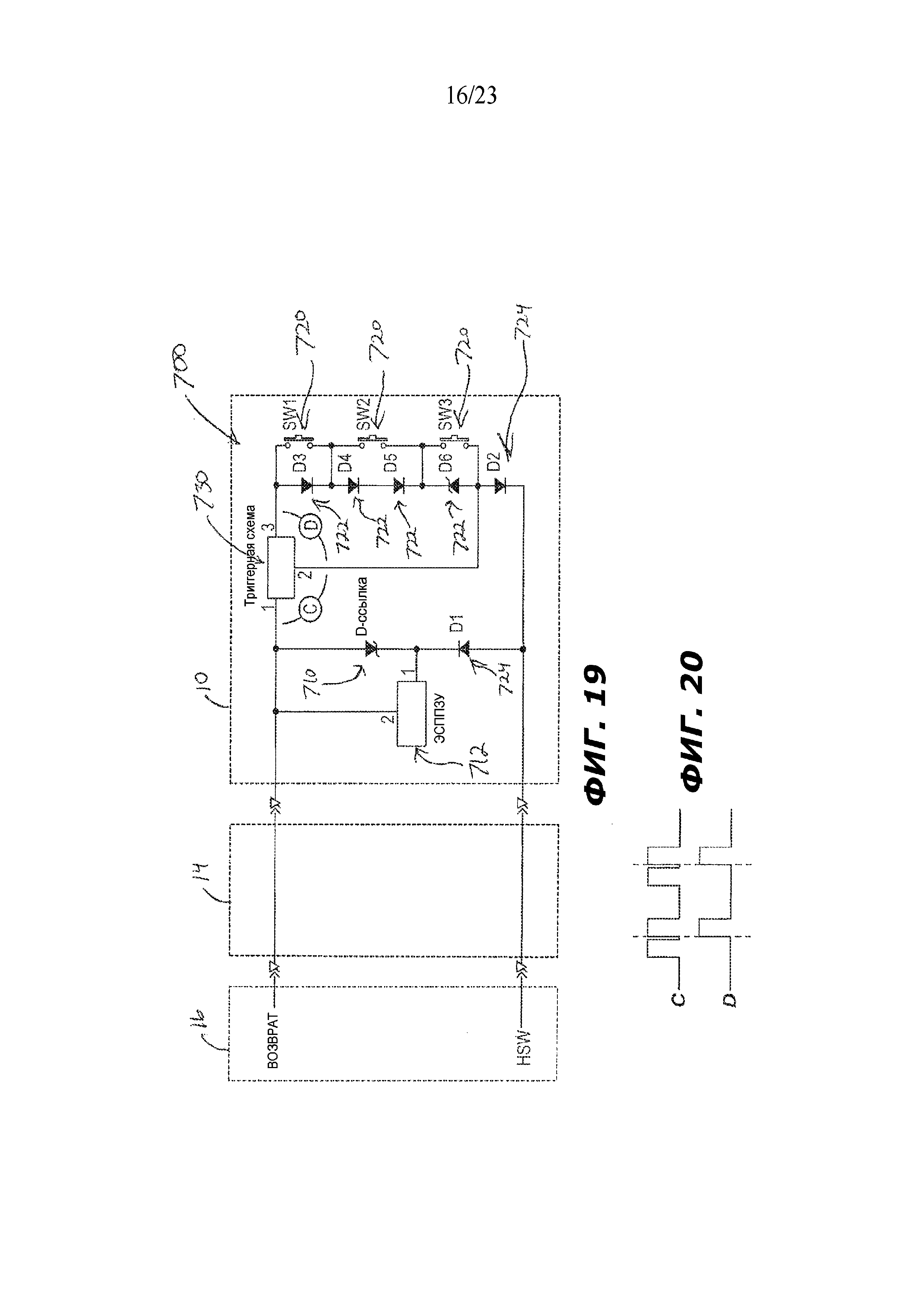
На ФИГ. 19 изображена еще одна типовая электросхема (700), которая может быть встроена в инструмент (10) для учета колебаний сопротивления, как описано выше. Цепь (700), по существу, аналогична цепи (400), описанной выше, в том, что эта цепь (300) включает в себя опорный диод (710), ЭСППЗУ (712), переключатели (720) и диоды (722, 724), которые расположены аналогично расположению эталонного диода (410), ЭСППЗУ (412), переключателей (420) и диодов (422, 424) в цепи (400). В отличие от схемы (400) схема (700) в данном примере дополнительно включает в себя триггерную схему (730) вместо схемы задержки включения (430). Триггерная схема (730) в данном примере представляет собой тип триггерной схемы, которая инициируется вторым импульсом во время отрицательного полупериода и сбрасывается положительным импульсом во время положительного полупериода. Несмотря на то что это не показано, следует понимать, что возможен вариант расположения триггерной схемы (730) на противоположном конце цепной схемы переключателя (720), например аналогично размещению схемы включения задержки (630) в цепи (600). На ФИГ. 20 показаны примерные входные и выходные сигналы триггерной схемы (730). В частности, сигнал С представляет собой входной сигнал для триггерной схемы (730), в то время как сигнал D - это выходной сигнал для триггерной схемы (730).
Следует иметь в виду, что описанные выше схемы (200, 300, 400, 500, 600, 700) являются лишь иллюстративными примерами. Различные другие подходящие компоненты, приспособления и способы могут быть использованы для попеременного переключения только в эталонных схемах, а затем либо в цепной схеме переключателя параллельно с эталонными параметрами, либо отдельно. Следует также понимать, что количество переключателей (220, 320, 420, 520, 620, 720) может меняться, в результате чего может использоваться более трех выключателей (220, 320, 420, 520, 620, 720) или менее трех переключателей (220, 320, 420, 520, 620, 720).
IV. Примеры одноразовых компонентов
По меньшей мере одну или несколько частей некоторых вариантов инструмента (10) можно стерилизовать и использовать повторно. Например, целесообразно извлекать и повторно использовать электрические компоненты рукоятки в сборе (20), например цепи и т.д. Однако нежелательно повторное использование других частей рукоятки в сборе (20), таких как внешний корпус рукоятки в сборе (20), кнопки (26) и т.д. Таким образом, желательно конфигурировать блок рукоятки (20) так, чтобы некоторые компоненты в блоке рукоятки (20) могли быть извлечены и повторно использованы, притом, что другие части рукоятки в сборе (20) не могут быть восстановлены и повторно использованы. При некоторых обстоятельствах по меньшей мере часть инструмента (10) может повторно использоваться после того, как инструмент (10) был использован в хирургической процедуре. При некоторых других обстоятельствах по меньшей мере часть инструмента (10) может повторно использоваться до того, как инструмент (10) сходит с конвейера завода-изготовителя. Например, если инструмент (10) не проходит контроль качества, один или несколько компонентов инструмента (10) (например, те, которые никак не влияли на то, что инструмент не прошел контроль качества) могут быть восстановлены и вновь использованы для создания другого инструмента (10). Несколько примеров конфигураций, которые могут быть включены в блок рукоятки (20) для обеспечения выборочного повторного использования, описаны более подробно ниже, в то время как другие примеры будут очевидны специалистам в данной области в свете изложенных здесь идей.
В некоторых вариантах инструмента (10) по меньшей мере часть электросхемы может включать в себя гибкую схему в форме ламината. Одна или несколько областей наружного слоя ламината могут быть приклеены к корпусу рукоятки в сборе (20) таким образом, что при разборке корпуса в процессе восстановления от гибкой схемы отойдут один или несколько слоев, в результате чего гибкая схема может быть повреждена. Такое расхождение слоев может привести к неисправности гибкой схемы. В некоторых таких случаях к корпусу рукоятки в сборе (20) приклеивается весь наружный слой схемы. В других случаях к корпусу рукоятки в сборе (20) приклеиваются только части схемы, расположенные вблизи основных компонентов схемы. Как вариант, к корпусу рукоятки в сборе (20) может быть прикреплен один или несколько компонентов схемы, причем не обязательно приклеивать к корпусу рукоятки (20) гибкий ламинат гибкой схемы. В некоторых подобных версиях гибкий ламинат гибкой схемы может быть перфорирован или иным образом ослаблен, что приводит к появлению участка контролируемого повреждения, в связи с чем гибкая схема отделяется от приклеенного компонента схемы, а сам этот компонент схемы остается приклеенным к корпусу рукоятки в сборе при попытке восстановления, когда части устройства рукоятки отрываются друг от друга. Еще один чисто иллюстративный пример: один или несколько участков схемы в блоке рукоятки (20) могут быть чувствительны к воде, спирту или иной жидкости таким образом, что схема разрушается, когда такие участки вступают в контакт с водой, спиртом или иными жидкостями, которые могут быть использованы при попытке восстановления. Например, ламинат в схеме выполнен с возможностью расслаивания при контакте с водой, спиртом или другой жидкостью.
На ФИГ. 21-25 изображена примерная сборка корпуса рукоятки (1000), которая может быть встроена в инструмент (10). Сборка (1000) в этом примере включает в себя первый элемент корпуса (1010), второй элемент корпуса (1030), а также элемент крепления (1050). Как лучше всего видно на ФИГ. 21, корпусный элемент (1010) включает в себя множество штырей (1012) и разъем (1014). Как лучше всего видно также на ФИГ. 21, элемент корпуса (1030) включает в себя множество разъемов (1032) и штырь (1034). Штыри (1012, 1034) настроены для вставки в соответствующие разъемы (1014, 1032), чтобы закрепить вместе элементы корпуса (1010, 1030). Только в качестве примера штыри (1012, 1034) могут быть вставлены в соответствующие разъемы (1014, 1032) способом тугой посадки, могут быть закреплены в разъемах (1014, 1032) с использованием ультразвуковой сварки или термической клепки, могут быть вклеены в разъемы (1014, 1032) с использованием клеящего вещества и/или могут быть закреплены в разъемах (1014, 1032) иным способом. Как лучше всего видно на ФИГ. 22, 23, элементы корпуса (1010, 1030) также включают в себя дополнительные шпунтовые компоненты (1018, 1038). В некоторых других вариантах шпунтовые компоненты (1018, 1038) заменяются дополнительными компонентами, соединенными взакрой, или иными видами структур. Шпунтовые компоненты (1018, 1038) могут быть скреплены друг с другом с помощью плотной посадки, ультразвуковой сварки, термической клепки, клеящего вещества и т.д.
Как лучше всего видно также на ФИГ. 22, 23, в каждом из элементов корпуса (1010, 1030) есть ослабленная полоска (1016, 1036) в форме V-образного выреза. Ослабленные полоски (1016, 1036) способствуют уменьшению толщины стенок, что приводит к повреждениям участков вдоль ослабленных полосок (1016, 1036) при разъединении элементов корпуса (1010, 1030). Другими словами, когда кто-то пытается разделить соединенные элементы корпуса (1010, 1030) путем разъединения элементов корпуса (1010, 1030), в одном или в обоих корпусах (1010, 1030) соответствующая ослабленная полоска может сломаться (1016, 1036). Таким образом, фрагмент одного элемента корпуса (1010, 1030) может остаться в соединении со вторым корпусным элементом (1010, 1030), в то время как остальная часть разобранного корпусного элемента (1010, 1030) может отделиться от второго корпусного элемента (1010, 1030). Эта поломка или разделение может предотвратить повторное использование обоих корпусных элементов (1010, 1030). Меньший фрагмент поврежденного корпусного элемента (1010, 1030) может остаться в соединении со вторым корпусным элементом (1010, 1030) благодаря надежному соединению между шпунтовыми компонентами (1018, 1038), между разъемом (1014) и штырем (1034) и/или благодаря иным факторам. Другие подходящие способы, с помощью которых можно контролировать повреждения корпусных элементов (1010, 1030), будут очевидны специалистам в данной области в контексте излагаемых здесь идей.
Как лучше всего видно на ФИГ. 25, удерживающий элемент (1050) в настоящем примере имеет Y-образную форму и состоит из первой ветви (1052), второй ветви (1054) и третьей ветви (1056). Первая ветвь (1052) состоит из изгиба (1058) и выемки (1070), которая заканчивается у края (1072). Вторая и третья ветви (1054, 1056) имеют соответствующие штыри (1060). Как лучше всего видно на ФИГ. 21 и 24, удерживающий элемент (1050) выполнен с возможностью совмещения с компонентами элемента удержания (1020, 1040) корпусных элементов (1010, 1030). Как показано на ФИГ. 23, компонент удерживающего элемента (1020) корпусного элемента (1010) содержит пару разъемов (1022), которые имеют шестигранную форму. Штыри (1060) выполнены с возможностью вставки в разъемы (1022) посредством плотной посадки. Конечно, у разъемов (1022) может быть любая другая подходящая конфигурация, и для закрепления штырей (1060) в разъемах (1022) может также использоваться ультразвуковая сварка, термическая клепка, клеящие вещества и т.д. Как показано на ФИГ. 22 и 24, компонент удерживающего элемента (1040) корпусного элемента (1030) содержит пару соединений с пружинными защелками (1042). Удерживающий элемент (1050) можно расположить позади соединений с пружинными защелками (1042) таким образом, что соединения с пружинными защелками (1042) способствуют сохранению положения удерживающего элемента (1050) относительно корпусного элемента (1030). Как показано, изгиб (1058) удерживающего элемента (1050) проходит между соединениями с пружинными защелками (1042) и перед ними, в то время как ветви (1054, 1056) расположены позади соединений (1042).
В настоящем примере один или несколько блоков переключателей (не изображены) расположены позади кнопок (26) и включают в себя схемы переключения, которые реагируют на приведение в действие кнопок (26). Выемка (1070) имеет такие размеры, чтобы принять часть данного блока переключателя. В частности, блок переключателя можно расположить между изгибом (1058) первой ветви (1052) и соединениями с пружинными защелками (1042), с тем чтобы блок переключателя располагался в выемке (1070). Соединения с пружинными защелками (1042) способствуют удержанию блока переключателя в положении относительно корпусного элемента (1030). Стойки (1043), заключенные в корпусном элементе (1010), также удерживают блок переключателя относительно корпусного элемента (1030). Таким образом, один внешний край блока переключателя удерживается пружинными защелками (1042), в то время как противоположный внешний край блока переключателя, находящийся в выемке (1070), фиксируется с помощью удерживающего элемента (1050). Так как удерживающий элемент (1050) прикреплен к корпусному элементу (1010), следует понимать, что при разъединении корпусных элементов (1010, 1030) удерживающий элемент (1050) и соединения с пружинными защелками (1042) станут противодействующими силами в отношении внешних краев блока переключателя. Эти противоположные поверхности на блоке переключателя могут разорвать или повредить переключатель (например, путем сдвига) или иным образом привести его в нерабочее состояние. Таким образом, если кто-то попытается разобрать блок рукоятки (1000) путем разъединения корпусных элементов (1010, 1030), это приведет также к повреждению блока переключателя, который находится позади кнопок (26). Переключатель в сборе может содержать любые подходящие компоненты, такие как жесткие платы, гибкие схемы, провода, обычные переключатели и т.д. В некоторых случаях край (1072) является острым, чтобы облегчить разъединение блока переключателя.
Притом что в данном примере соединения с пружинными защелками (1042) удерживают блок переключателя относительно корпусного элемента (1030), следует понимать, что блок переключателя может удерживаться относительно корпусного элемента (1030) и иным способом. Например, по меньшей мере часть блока переключателя может быть приварена к корпусному элементу (1030) (с использованием сварки трением, ультразвуковой сварки, термической клепки, клея и т.д.). Другой, чисто иллюстративный пример: второстепенный удерживающий компонент может быть наложен вокруг выемки (1070) удерживающего элемента (1050). Еще один чисто иллюстративный пример: переключатель в сборе может быть прикреплен к корпусному элементу (1030). Другие подходящие способы, с помощью которых можно закрепить переключатель в сборе, будут очевидны специалистам в данной области в контексте излагаемых здесь идей.
На ФИГ. 26 изображен еще один пример сборки корпуса рукоятки (1100), которая может быть встроена в инструмент (10). Сборка (1100) в этом примере содержит первый элемент корпуса (1110) и второй элемент корпуса (1130). Корпусный элемент (1110) включает в себя множество штырей (1112) и разъем (1114). Корпусный элемент (1130) включает в себя множество разъемов (1132) и штырь (1134). Штыри (1112, 1134) настроены для вставки в соответствующие разъемы (1114, 1132), чтобы закрепить вместе элементы корпуса (1110, 1130). Только в качестве примера штыри (1112, 1134) могут быть впрессованы в соответствующие разъемы (1114, 1132), могут быть закреплены в разъемах (1114, 1132) с использованием ультразвуковой сварки или термической клепки, могут быть вклеены в разъемы (1114, 1132) с использованием клея и/или могут быть закреплены в разъемах (1114, 1132) иным способом.
Корпусный элемент (1110) содержит встроенный удерживающий компонент (1150), который содержит вилку (1152). Зазор между зубцами вилки (1152) выполнен с возможностью приема части блока переключателя, которая может включать схемы переключения, реагирующие на приведение в действие кнопок (26). Для прикрепления блока переключателя к вилке (1152) может быть использовано клеящее вещество. В случае если корпусный элемент (1100) разобран, блок переключателя может фиксироваться удерживающим компонентом (1150). Следует иметь в виду, что из-за адгезии блока переключателя с удерживающим компонентом (1150) работник, который собирает несколько корпусных блоков (1100), сможет быстро определить тот корпусный блок (1100), который уже был собран и, возможно, позже разобран. Это может побудить работника забраковать корпусный блок (1100). Кроме того, для приклеивания переключателя в сборе к смежному участку корпусного элемента (1130) может быть использовано клеящее вещество. Таким образом, при разборке корпусного блока (1100) путем разъединения корпусных элементов (1110, 1130) блок переключателя может быть разорван и тем самым выведен из строя. Повторим, что, если два оторванных друг от друга фрагмента блока переключателя останутся прикрепленными к каждому корпусному элементу (1110, 1130), работник, который собирает несколько корпусных блоков (1100), сможет быстро определить тот корпусный блок (1100), который уже был собран и впоследствии разобран.
В некоторых случаях может быть целесообразным тщательно разобрать блок рукоятки (20), чтобы минимизировать повреждение блока рукоятки (20). Например, это можно сделать для того, чтобы сохранить по меньшей мере часть блока рукоятки (20) и/или какие-то элементы внутри блока рукоятки (20). В некоторых вариантах сборки рукоятки (20) это можно сделать, аккуратно просверлив одно или несколько отверстий в рукоятке (20). Например, на ФИГ. 27 показан пример, где отверстие (1200) может быть просверлено в корпусном элементе (1010, 1110) в месте, соответствующем штырю (1034, 1134) и разъему (1014, 1114), благодаря чему происходит разъединение штыря (1034, 1134) и разъема (1014, 1114). На ФИГ. 28 показан пример, где отверстия (1210, 1220) просверлены в корпусном элементе (1030) в местах, соответствующих штырям (1060) и разъемам (1022), благодаря чему происходит разъединение штырей (1060) и разъемов (1022). Конечно, можно просверлить корпусные элементы (1010, 1030, 1110, 1130) во многих других местах, в том числе в тех, которые соответствуют штырям (1012, 1112) и разъемам (1032, 1132). Просверленные отверстия могут способствовать разъединению корпусного элемента (1010, 1110) и корпусного элемента (1030, 1130) с применением минимальных усилий, могут существенно сохранить структурную целостность корпусных элементов (1010, 1110, 1030, 1130) и/или могут минимизировать повреждение компонентов, входящих в состав корпусных элементов (1010, 1110, 1030, 1130). В тех случаях, когда корпусный элемент (1010, 1110, 1030, 1130) может быть использован повторно, просверленное отверстие можно заполнить, закрыть или устранить иным образом.
На ФИГ. 29, 30 изображен пример ультразвукового ножа в сборе (1300), содержащий ультразвуковое лезвие (1310), расположенное в трубке (1320). Ультразвуковое лезвие (1310) расположено так, что дистальный конец (1312) лезвия (1310) открыт относительно трубки (1320). Внутренний диаметр трубки (1320) существенно больше, чем наружный диаметр лезвия (1310), в результате чего между внутренним диаметром трубки (1320) и внешним диаметром лезвия (1310) образуется цилиндрический зазор. Кольцевой фитинг (1330) расположен с внешней стороны лезвия (1310) для фиксации лезвия (1310) относительно трубки (1320). Только в качестве примера фитинг (1330) может быть изготовлен из пластика или эластомерного материала. Фитинг (1330) может иметь продольное расположение, соответствующее узлу, связанному с резонансными ультразвуковыми колебаниями, передаваемыми через лезвие (1310). Расположение и/или свойства фитинга (1330) обеспечивают существенную акустическую изоляцию трубки (1320) по отношению к лезвию (1310). Несмотря на то, что изображен один фитинг (1330), следует понимать, что фитингов может использоваться несколько. Следует также понимать, что могут применяться иные компоненты помимо фитинга (1330). Только в качестве примера вместо фитинга (1330) может быть использовано одно или несколько уплотнительных колец, расположенных в узлах.
В трубке (1320) имеется дистально направленная вставка (1322), образованная U-образным вырезом в трубке (1320). Как лучше всего видно на ФИГ. 30, вставка (1322) направлена дистально внутрь трубки (1320). В настоящем примере вставка (1322) не контактирует с ультразвуковым лезвием (1310). В некоторых других вариантах вставка (1322) контактирует с ультразвуковым лезвием (1310) в узле, связанном с резонансными ультразвуковыми колебаниями, передаваемыми через лезвие (1320). Вставка (1322) обладает эластичностью, благодаря чему вставка (1322) отклоняется в сторону, когда во время сборки ультразвукового ножа (1300) лезвие (1310) и фитинг (1330) вставляются через трубку (1320) дистально, однако вставка (1322) возвращается в положение, показанное на ФИГ. 30, после того как фитинг (1330) удаляется из вставки (1322). Тем не менее, если во время разборки блока ультразвукового ножа (1300) лезвие (1310) и фитинг (1330) извлекаются через трубку (1320) проксимально, вставка (1322) прорвет фитинг (1330) или иным образом повредит фитинг (1330). В зависимости от степени, в которой кто-то будет впоследствии пытаться повторно использовать лезвие (1310) и фитинг (1330), поврежденный фитинг (1330) повлияет на то, что отремонтированный ультразвуковой нож (1300) не выдержит проверку утечки.
В некоторых вариантах инструмента (10) преобразователь в сборе (12) может удерживаться внутри блока рукоятки (20) с помощью корпуса соединителя, который позволяет блоку преобразователя (12) вращаться относительно рукоятки (20) по продольной оси, определяемой блоком преобразователя (12). На ФИГ. 31, 32 показан пример такого соединительного элемента (1400) вместе с примерными компонентами, которые могут использоваться для совмещения соединительного элемента (1400) и блока рукоятки (20). В частности, корпус соединителя (1400) в этом примере включает в себя удерживающий выступ (1410), который определяет границы отверстия (1412). В одной половине корпуса рукоятки находится удерживающий зажим (1420), в то время как в другой половине корпуса рукоятки находится пара удерживающих фланцев (1430). Удерживающий зажим (1420) включает в себя пару рычагов с зубцами (не показаны). Рычаги с зубцами выполнены с возможностью прохождения через отверстие (1412) удерживающего выступа (1410) и тем самым обеспечения соединения на защелках между корпусом соединителя (1400) и связанной с ним половины корпуса рукоятки, как показано на переходе от ФИГ. 31 к ФИГ. 32. Фланцы (1430) выполнены с возможностью частичного охватывания корпуса соединителя (1400) и тем самым до определенной степени ограничения движения корпуса соединителя (1400), однако они допускают некоторое движение корпуса соединителя (1400) в блоке рукоятки.
В другом примере, первая створка зажима (не показана) и вторая створка зажима (не показана) соединяются, охватывая корпус соединителя (не показан), который схож с корпусом соединителя (1400), описанным выше. Створки можно соединить с блоком рукоятки (20) с помощью зажимных стержней, клеящего вещества, ультразвуковой сварки, иного вида сварки или каким-либо другим подходящим способом. Соединенные створки могут двигаться или быть неподвижными относительно рукоятки в сборе (20). При этом соединенные створки могут способствовать движению корпуса соединителя относительно соединенных створок по мере необходимости. Только в качестве еще одного иллюстративного варианта вместо соединенных створок между корпусом соединителя (1500) и блоком рукоятки (20) может находиться силиконовый элемент. Такой силиконовый элемент может эффективно удерживать корпус соединителя в блоке рукоятки (20), при этом все же допуская некоторую степень движения (свободного перемещения) корпуса соединителя относительно рукоятки в сборе (20). Другие подходящие способы, с помощью которых корпус соединителя может быть соединен с блоком рукоятки, будут очевидны специалистам в данной области в контексте излагаемых здесь идей. Данные функции соединения корпуса соединителя можно использовать в сочетании с любыми функциями, описанными выше, как способ распознавания блока переключателя или защитного чехла, бывшего в использовании.
V. Разное
Следует понимать, что любая из версий инструментов, описанных в настоящей заявке, может включать различные другие компоненты в дополнение к тем, что описаны выше, или вместо них. Только в качестве примера любой из инструментов, описанных в настоящей заявке, может также включать в себя один или несколько различных компонентов, описанных в любом из справочных материалов, включенных в настоящий документ посредством ссылки. Следует также понимать, что содержащиеся в настоящей заявке идеи могут быть легко применены в отношении любого из инструментов, описанных в любом из справочных материалов, приведенных в данной заявке, и, соответственно, существует много способов сочетания идей настоящей заявки с идеями любого справочного материала, приведенного в настоящем документе. Другие виды инструментов, к которым можно применять содержащиеся в настоящей заявке инструкции, очевидны для специалистов в данной области.
Следует иметь в виду, что любой патент, публикация или другая информация, которые полностью или частично включены в настоящий документ путем ссылки, являются составной частью данного документа только в той степени, в которой они не противоречат существующим определениям, положениям или другой информации описания, представленной в настоящем описании. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям настоящего документа, которая была включена в указанный документ путем ссылки. Любой материал или его часть, которая включена в настоящий документ путем ссылки и которая противоречит указанным определениям, положениям или другому описанию, представленному в настоящем документе, включается в настоящий документ в той мере, в которой между включенным путем ссылки материалом и настоящим документом с описанием не возникает противоречий.
Версии описанных выше устройств могут применяться в традиционных видах медицинского лечения и процедур, выполняемых медицинским специалистом, а также в роботизированных видах медицинского лечения и процедур. Только в качестве примера различные идеи, изложенные в настоящей заявке, могут быть легко использованы в какой-либо роботизированной хирургической системе, например в системе DAVINCI™, созданной компанией Intuitive Surgical, Inc., Саннивейл, Калифорния. Кроме того, специалистам в данной области будет понятно, что различные идеи, изложенные в настоящей заявке, могут легко сочетаться с различными идеями, приведенными в патенте США № 6,783,524, озаглавленном «Робототехнический хирургический инструмент с приспособлением для ультразвуковой каутеризации и резки», опубликованном 31 августа 2004 г., включенном в настоящую заявку посредством ссылки.
Описанные выше версии могут быть выполнены с возможностью утилизации после однократного применения, или они могут быть выполнены с возможностью многократного применения. Версии либо в одном, либо в обоих случаях могут быть подготовлены для повторного применения после по меньшей мере одного применения. Восстановление может включать в себя любую комбинацию стадий разборки устройства с последующей очисткой или заменой конкретных деталей, за которыми следует повторная сборка. В частности, некоторые версии устройства могут быть разобраны и любое количество конкретных элементов или частей устройства может быть избирательно заменено или удалено в любой комбинации. После очистки и/или замены конкретных частей некоторые версии устройства могут быть повторно собраны для последующего применения либо в отделении, выполняющем подготовку к повторному применению, либо силами пользователя непосредственно до процедуры. Специалисты в данной области техники обратят внимание, что при восстановлении устройства могут использоваться различные способы разборки, чистки/замены и повторной сборки. Использование таких способов, а также полученное в результате восстановленное устройство входят в сферу действия настоящей заявки.
Только в качестве примера описанные в настоящем документе версии могут быть стерилизованы до и/или после процедуры. В одной методике стерилизации устройство помещают в закрытый и запечатанный контейнер, такой как пластиковый пакет или пакет из материала Тайвек (TYVEK). Затем контейнер и устройство можно разместить в поле излучения, которое может проникать в контейнер, такого как гамма-излучение, рентгеновское излучение или высокоэнергетический поток электронов. Излучение может убивать бактерии на устройстве и в контейнере. Затем стерилизованное устройство можно хранить в стерильном контейнере для применения позднее. Устройство также можно стерилизовать любым другим известным в данной области способом, включая бета- или гамма-излучение, оксид этилена или пар.
Показанные и описанные различные варианты осуществления настоящего изобретения, дополнительная адаптация способов и систем, описанных в настоящем документе, могут быть достигнуты путем надлежащих модификаций любым специалистом в данной области, не отходя от объема настоящего изобретения. Несколько из подобных возможных модификаций были упомянуты, и другие модификации будут вполне очевидны специалистам в данной области техники. Например, примеры, варианты осуществления, геометрические параметры, материалы, размеры, пропорции, шаги и т.п., описанные выше, являются иллюстративными и не обязательны. Соответственно, объем настоящего изобретения следует рассматривать в свете следующей формулы изобретения с учетом того, что она не ограничивается подробными описаниями структуры и функционирования, показанными и описанными в спецификациях и на чертежах.
Реферат
Группа изобретений относится к медицинской технике, а именно к ультразвуковым хирургическим средствам для оперирования тканей. Инструмент содержит корпус, ультразвуковой преобразователь, стержень, выходящий дистально из корпуса, причем данный стержень образует продольную ось, и концевой рабочий орган на дистальном конце стержня, который содержит ультразвуковое лезвие, находящееся в акустической связи с ультразвуковым преобразователем, ультразвуковое лезвие включает в себя область выемок, имеющую множество выемок, и имеет длину от проксимального конца до дистального конца, при этом область выемок дополнительно включает в себя вогнутый переход и сужающуюся область, вогнутый переход области выемок расположен дистально относительно проксимального конца, причем сужающаяся область области выемок расположена дистально относительно вогнутого перехода и сужается таким образом, что поперечное сечение сужающейся области уменьшается вдоль длины сужающейся области к дистальному концу, выемки в вогнутом переходе включают в себя первую и вторую выемки, первая выемка имеет первый дугообразный участок, определенный первым радиусом, проложенным вдоль первой плоскости, проходящей через продольную ось стержня, при этом продольная ось стержня проходит вдоль первой плоскости, вторая выемка имеет второй дугообразный участок, определенный вторым радиусом, проложенным вдоль первой ортогональной плоскости, и выемки в вогнутом переходе дополнительно включают в себя третий дугообразный участок, по меньшей мере частично определенный третьим радиусом, проложенным вдоль второй плоскости, причем вторая плоскость параллельна первой плоскости и вторая плоскость смещена от первой плоскости таким образом, что продольная ось стержня не проходит вдоль первой плоскости. Устройство содержит ультразвуковой хирургический инструмент, включающий одно или несколько приспособлений для регулируемого падения напряжения во время работы хирургического инструмента, источник питания, выполненный с возможностью генерировать запросный сигнал в цикле, причем цикл включает в себя первую часть цикла и вторую часть цикла, и контрольную схему, связанную с хирургическим инструментом и источником питания, причем контрольная схема включает в себя одно или несколько заранее определенных приспособлений для падения напряжения, выполненных с возможностью обеспечения заранее определенного падения напряжения во время работы хирургического инструмента, в котором одно или несколько приспособлений для регулируемого падения напряжения и контрольная схема электрически связаны с источником питания параллельно, источник питания выполнен с возможностью считывать одно или несколько заранее определенных приспособлений для падения напряжения контрольной схемы в первой части цикла запросного сигнала для регулируемого падения напряжения контрольной схемы во второй части цикла запросного сигнала и с возможностью вычитать падение напряжения из одного или нескольких приспособлений для регулируемого падения напряжения на основе падения напряжения в одном или нескольких заранее определенных приспособлений для падения напряжения во время работы хирургического инструмента. В группу изобретений входит также способ работы хирургического инструмента. Использование изобретений позволяет расширить арсенал устройств для оперирования тканей с использованием ультразвука. 3 н. и 13 з.п. ф-лы, 32 ил.
Формула
Документы, цитированные в отчёте о поиске
Ультразвуковой скальпель
Комментарии