Сцепка тягового транспортного средства и движимой им сельскохозяйственной уборочной машины - RU2676996C2
Код документа: RU2676996C2
Чертежи
Описание
Область техники
Предлагаемое изобретение относится к сцепке тягового транспортного средства, в частности, трактора, и движимой им сельскохозяйственной уборочной машины, в частности, тюкового пресс-подборщика, согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
При уборке зеленых кормов часто применяют сельскохозяйственные уборочные машины, в частности, тюковые пресс-подборщики или тележки-погрузчики, буксируемые по полю тяговым транспортным средством. При этом указанные уборочные машины обычно получают приводную мощность от тягового транспортного средства, чтобы приводить имеющиеся рабочие агрегаты уборочной машины (например, подборщик, режущее устройство, сгребающее устройство, поршень пресса), служащие для подачи и/или обработки захваченной убранной культуры. Для этого в задней части тягового транспортного средства, как правило, трактора, устанавливают вал отбора мощности, соединенный с приводным валом уборочной машины с возможностью передачи крутящего момента. Вал отбора мощности трактора приводится от приводного двигателя трактора. Таким образом, приводной двигатель трактора, вал отбора мощности и приводной вал уборочной машины образуют существенные элементы приводной системы, служащей для привода рабочих агрегатов уборочной машины.
Во время выполнения уборочных работ тюковым пресс-подборщиком, буксируемым трактором, водителю буксирующего трактора сложно контролировать множество динамически изменяющихся рабочих параметров, влияющих во время движения по полю на качество уборочного процесса. Так, например, на процесс уборки в значительной мере влияют такие факторы, как вид, количество, объем, влажность или иные свойства захваченной убираемой культуры. Кроме того, на процесс уборки влияют механические факторы, например, резерв мощности и частота вращения приводного двигателя трактора, скорость движения трактора (и буксируемого им пресс-подборщика), скорость и нагрузка отдельных рабочих агрегатов (например, подборщика, режущего ротора, сгребающего устройства, поршня пресса) пресс-подборщика и т.п. Некоторые факторы состоят в сложных взаимосвязях друг с другом и чаще всего динамически изменяются во время уборки. Таким образом, сложность для водителя во время уборки заключается, в том числе, в необходимости выбора подходящей скорости движения. Это обусловлено тем, что только при не слишком высокой скорости движения сцепку трактора и пресс-подборщика во время уборки можно эксплуатировать с достаточным резервом мощности приводного двигателя, чтобы, например, предотвратить остановку приводной системы и/или повреждения машины и/или травмы людей, например, при внезапном изменении условий уборки и/или эксплуатационных условий.
В зависимости от размеров и формы обрабатываемого поля сцепка трактора и пресс-подборщика во время работы на поле не всегда находится в описанной выше уборочной ситуации, то есть, в рабочем состоянии, в котором тюковый пресс-подборщик захватывает убираемую культуру для ее обработки. Так, в частности, после соответствующего прохождения «отрезка» (максимально прямого или слегка изогнутого участка пути, на котором может выполняться непрерывный процесс уборки) сцепка достигает конца поля (также называемого поворотной полосой), вследствие чего сцепка трактора и пресс-подборщика должна выполнить маневр разворота, чтобы продолжить уборку вдоль следующего отрезка, чаще всего смещенного вбок относительно первого отрезка. Во время движения по поворотной полосе уборка обычно не производится.
Для осуществления маневра разворота в конце поля водитель трактора должен контролировать множество параметров трактора и пресс-подборщика, чтобы одновременно выполнять различные операции. Например, опытный водитель на подходе к концу поля одновременно изменяет скорость движения, поднимает подборщик и вводит трактор в поворот. Дополнительно можно снизить частоту вращения вала отбора мощности с целью экономии топлива. После прохождения конца поля водитель выполняет обратные операции с целью продолжения уборки.
Из уровня техники для установленного на тракторе агрегата, например, плуга (известного самого по себе), известен способ, в частности, воспроизведения подъема плуга во время маневра разворота в соответствии с сохраненными в памяти рабочими процессами. Этот способ раскрыт в патентной заявке EP 0903656 B1. Таким образом, сокращается количество повторных управляющих операций, которые должен выполнять водитель во время маневра разворота, что позволяет снизить нагрузку на водителя, так как ему нужно только запустить сохраненные рабочие процессы. Однако при передаче этой технологии на сцепку трактора и пресс-подборщика был обнаружен недостаток, заключающийся в жесткой привязке сохраненных рабочих процессов ко времени. Поскольку при уборке зеленых кормов расстояния между соседними отрезками (в зависимости от соответствующего положения валка) и, тем самым, маршруты движения на поворотной полосе могут значительно различаться и, соответственно занимать различное время, программно-временное управление при уборке зеленых кормов может применяться лишь с ограничениями.
Раскрытие изобретения
Задачей настоящего изобретения является разработка сцепки указанного рода, которая освободит водителя от выполнения задач по контролю и регулировке, которые нужно осуществлять на сцепке при переходе от режима уборки к режиму движения в конце поля.
Указанная задача решена сцепкой с признаками, раскрытыми в пункте 1 формулы изобретения. Эта сцепка отличается наличием средств, предназначенных для распознавания того, находится ли уборочная машина в режиме уборки или в режиме движения по поворотной полосе, и управляющего устройства, которое выполнено с возможностью задания настройки, по меньшей мере, одного параметра, по меньшей мере, одного функционального устройства сцепки, который обеспечивает эксплуатацию сцепки в уборочной конфигурации или в конфигурации конца поля в зависимости от распознанной ситуации.
При этом под функциональным устройством может пониматься любое устройство тягового транспортного средства и/или уборочной машины, состоящее во взаимосвязи с эксплуатацией сцепки. Функциональное устройство тягового транспортного средства может представлять собой, например, его приводной двигатель, регулятор скорости движения, вал отбора мощности, рулевое управления. Функциональное устройство уборочной машины может представлять собой, например, ее подборщик, режущее устройство (ротор), сгребающее устройство, поршень пресса. Согласно изобретению, при этом сцепку оснащают средствами, способными распознавать, находится ли уборочная машина в режиме уборки (в ситуации, в которой можно захватывать и обрабатывать убираемую культуру) или в режиме конца поля (в ситуации, в которой уборочная машина покинула место произрастания культуры и нуждается в осуществлении маневра, который вернет ее на место произрастания культуры). В зависимости от распознанной ситуации («уборка» или «конец поля») управляющее устройство обеспечивает эксплуатацию сцепки, соответственно, в «уборочной конфигурации» или в «конфигурации конца поля» путем задания подходящих значений параметра (или параметров), по меньшей мере, одного функционального устройства.
В целесообразном варианте нахождение уборочной машины в режиме уборки или в режиме конца поля распознают в зависимости от одного или нескольких критериев работы сцепки. Критерием работы можно считать, в частности, любое определяемое и/или устанавливаемое вручную водителем состояние сцепки.
В следующем выгодном варианте осуществления сцепки с управляющим устройством соединено, по меньшей мере, одно устройство распознавания, выполненное с возможностью определения, по меньшей мере, одного состояния сцепки, в частности, угла поворота тягового транспортного средства, положения уборочной машины и/или тягового транспортного средства, состояния захвата убираемой культуры в уборочной машине, причем управляющее устройство выполнено с возможностью определения, на основании, по меньшей мере, одного из этих состояний, находится ли уборочная машина в режиме уборки или в режиме конца поля.
Для подавления ложных срабатываний, обусловленных очень кратковременными преходящими изменениями состояния, можно предусмотреть распознавание соответствующей ситуации управляющим устройством только при наличии соответствующего состояния в течение задаваемого минимального периода времени. Это позволит, например, избежать распознавания конца поля (в данном случае некорректного) при кратковременном перерыве уборочного процесса вследствие наезда на проплешину на поле.
Состояние захвата культуры уборочной машины можно распознавать, например, путем присоединения к устройству транспортировки и/или обработки культуры в уборочной машине датчика нагрузки (например, предназначенного для распознавания крутящего момента в приводной системе транспортирующего устройства), служащего для определения состояния захвата убираемой культуры в уборочной машине.
В качестве альтернативы или дополнения уборочную машину и/или тяговое транспортное средство можно оснастить детектором убранной культуры, позволяющим распознавать наличие убираемой культуры непосредственно перед уборочной машиной или тяговым транспортным средством, на основании чего можно определять ожидаемое состояние захвата убираемой культуры в уборочной машине.
По существу, возможны различные операции, активируемые управляющим устройством в связи с распознаванием одной из ситуаций «Уборка» или «Конец поля». Выгодным образом, управляющее устройство задает значение одной из следующих величин: скорость движения сцепки, угол поворота тягового транспортного средства, передаточное число ходового привода тягового транспортного средства, частота вращения вала отбора мощности тягового транспортного средства, передаточное число вала отбора мощности, высота подборщика, состояние привода подборщика, ротора, сгребающего устройства и/или поршня пресса уборочной машины.
В связи с этим в особенно выгодном варианте осуществления сцепки управляющее устройство задает скорость движения сцепки как во время работы в уборочной конфигурации, так и во время работы в конфигурации для конца поля. Эта операция освобождает водителя в каждый момент движения по полю (как в режиме уборки, так и в режиме поворотной полосы) от контроля и управления скоростью движения сцепки и, тем самым, позволяет ему выгодным образом сконцентрироваться на прочих важных задачах.
В следующем выгодном варианте осуществления управляющее устройство при обнаружении конца поля может самостоятельно инициировать одно или несколько действий (к которым, в частности, можно отнести: задание скорости движения, подъем подборщика, уменьшение частоты вращения вала отбора мощности, остановка привода устройства транспортировки и/или обработки культуры, разблокировка управляемого моста уборочной машины), чтобы перевести сцепку в конфигурацию конца поля.
При этом возможен вариант, в котором во время эксплуатации в конфигурации конца поля управляющее устройство будет задавать скорость движения сцепки, соответствующую определяемому пользователем значению или значению, полученному, в частности, управляющим устройством на основании характеристики поворотной полосы в каждом конкретном случае. В первом случае сцепка в конце поля самостоятельно перейдет на скорость движения, заданную пользователем. Во втором случае управляющее устройство самостоятельно определяет/рассчитывает скорость движения с учетом свойств (например, формы, величины, уклона) поворотной полосы - например, на основании заложенных в память топографических данных.
В следующем выгодном варианте управляющее устройство при распознавании состояния уборки может самостоятельно инициировать выполнение одной или нескольких операций (к которым, в частности, может относиться: задание скорости движения, опускание подборщика, увеличение частоты вращения вала отбора мощности, запуск привода устройства транспортировки и/или обработки культуры, блокировка управляемого моста уборочной машины), чтобы перевести сцепку в уборочную конфигурацию.
Как уже говорилось, выбор подходящей скорости движения в уборочном режиме сцепки трактора с пресс-подборщиком представляет собой проблему. Это обусловлено тем, что факторы, влияющие на обе машины и на прочие условия уборки урожая, состоят в сложной взаимосвязи друг с другом и в большинстве своем динамически изменяются во время уборки. Только в том случае, если скорость движения сцепки трактора с пресс-подборщиком выбрана не слишком большой, сцепку можно эксплуатировать во время уборки с достаточным резервом мощности приводного двигателя, позволяющим, например, предотвратить остановку приводной системы и/или повреждения машины и/или травмы людей, например, при внезапном изменении условий уборки и/или эксплуатационных условий. На практике это регулярно приводит к тому, что водитель по соображениям безопасности выбирает скорость движения ниже, чем позволяют реальные условия. Таким образом, потенциал мощности сцепки используется не полностью. Если же водитель во время уборки захочет поставить перед собой более высокие и/или отличающиеся цели, ему потребуется много знаний и опыта. Неправильный выбор скорости в любом случае приведет к дополнительным негативным последствиям, в частности, к ухудшению качества спрессованных тюков (неправильная форма тюков, измельчение убранной культуры).
Поэтому в следующем выгодном варианте исполнения сцепки управляющее устройство при работе в уборочной конфигурации задает скорость движения сцепки в зависимости от текущих измеренных рабочих параметров уборочной машины и тягового транспортного средства. В результате, выгодным образом, скорость движения выбирают, постоянно учитывая факторы, влияющие на сцепку в целом. Это позволяет надежно предотвратить остановки или повреждения машины, обусловленные перегрузкой рабочих агрегатов. Кроме того, рассмотрение тягового транспортного средства и уборочной машины как единого целого позволяет даже малоопытному водителю особенно эффективно эксплуатировать сцепку - например, с коэффициентом использования, близким к максимальному, или качеством, близким к оптимальному. Автоматическое задание скорости в уборочном режиме существенно снижает нагрузку на водителя. При этом, выгодным образом, задание скорости движения следует считать частью автоматического регулятора скорости движения, который непрерывно и самостоятельно регулирует и устанавливает заданную скорость движения на тяговом транспортном средстве. В этом случае водитель во время уборки полностью освобожден от выбора скорости движения.
В следующем выгодном варианте исполнения скорость движения при работе в уборочной конфигурации можно выбирать таким образом, чтобы сцепка при обеспечении безопасной работы достигала, по меньшей мере, цели уборки, задаваемой пользователем машины. Иными словами, управляющее устройство при задании скорости движения будет учитывать, по меньшей мере, цель уборки, то есть, оно попытается выбрать скорость движения, при которой, с учетом текущих рабочих параметров, можно будет максимально приблизиться к нужному результату уборки. При этом речь может идти о единой цели уборки, например, достижении высокой производительности или высокого качества/плотности.
Для регулирования скорости в уборочной конфигурации в качестве рабочих параметров уборочной машины можно учитывать, по меньшей мере, одну величину, характеризующую механическую нагрузку одного или нескольких рабочих агрегатов, в частности, их скорость, крутящий момент, рабочее давление и/или иные подобные величины; и/или можно учитывать величину, относящуюся к процессу уборки, в частности, влажность убираемой культуры, объем убираемой культуры, плотность прессования, величину тюка, производительность и/или иные подобные величины. В качестве альтернативы или дополнения в качестве рабочего параметра тягового транспортного средства можно учитывать нагрузку его приводного двигателя и/или текущее передаточное число ходового привода тягового транспортного средства. Возможны и другие рабочие параметры, например, проскальзывание колеса, оставшееся количество топлива и т.д.
Краткое описание чертежей
Изобретение детально разъясняется ниже с учетом прилагаемых фигур, на которых изображено:
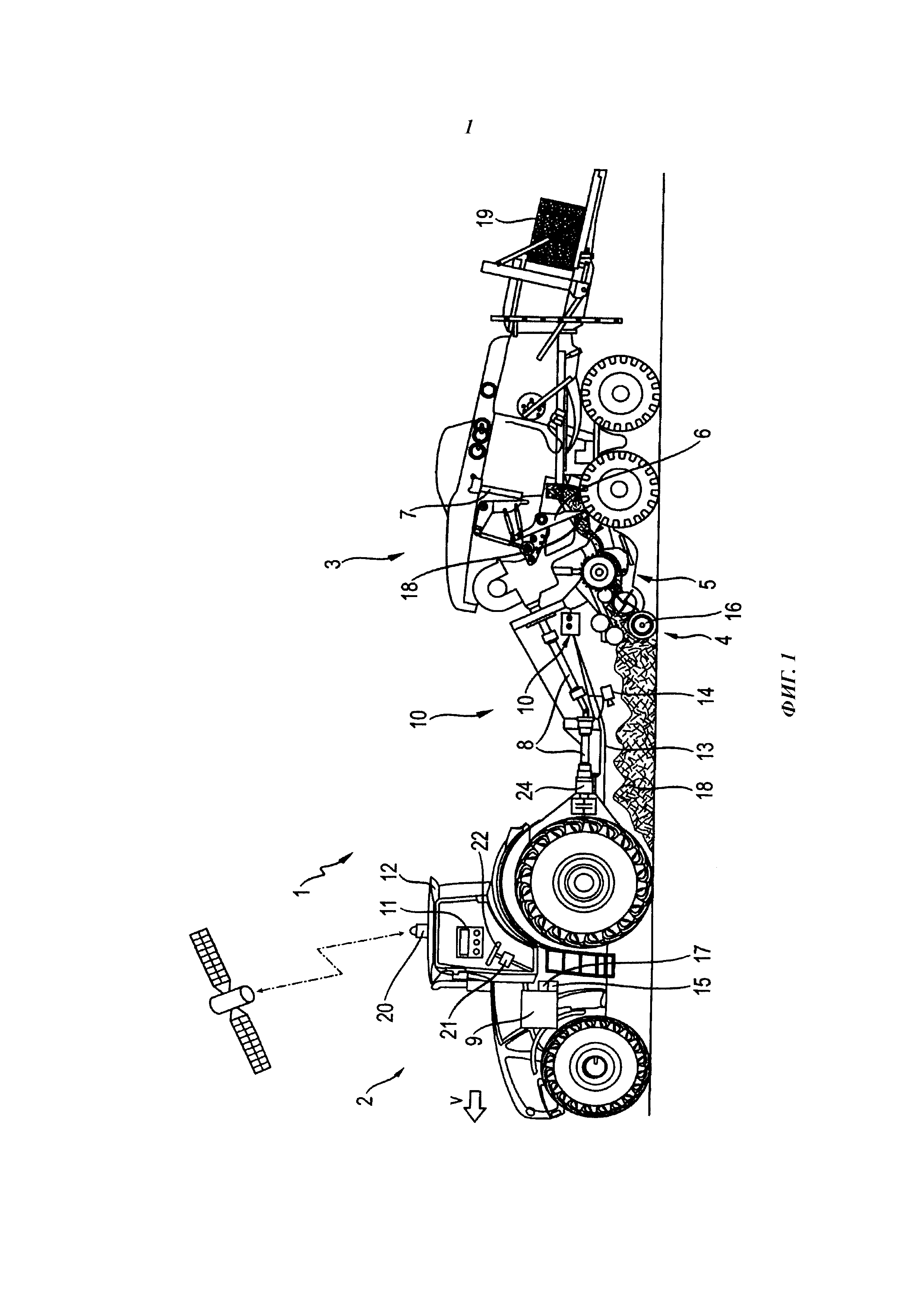
Фигура 1: схематичное изображение сцепки трактора с пресс-подборщиком, вид сбоку.
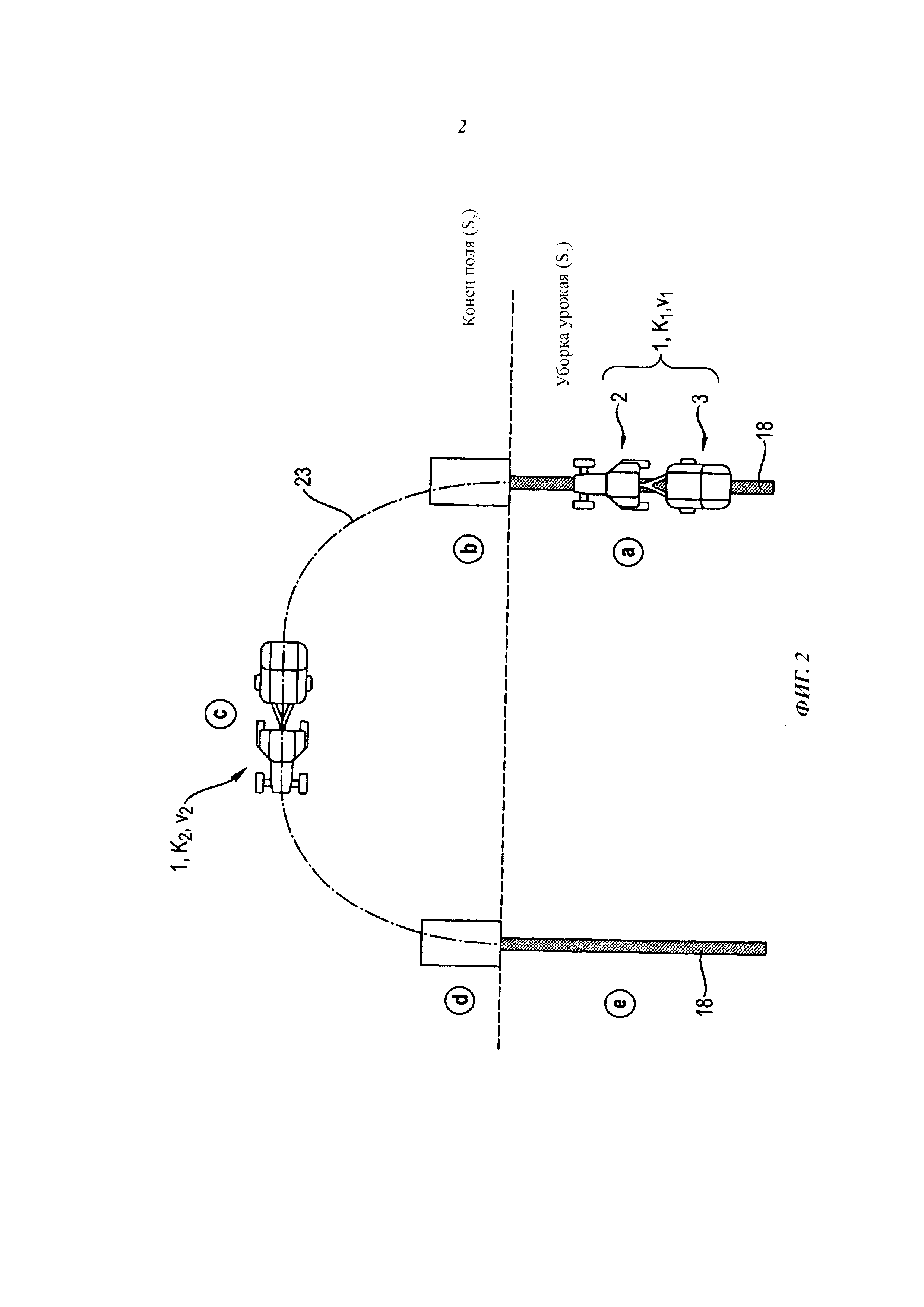
Фигура 2: схематичное изображение сцепки трактора с пресс-подборщиком, вид сверху, в различных ситуациях при работе на поле.
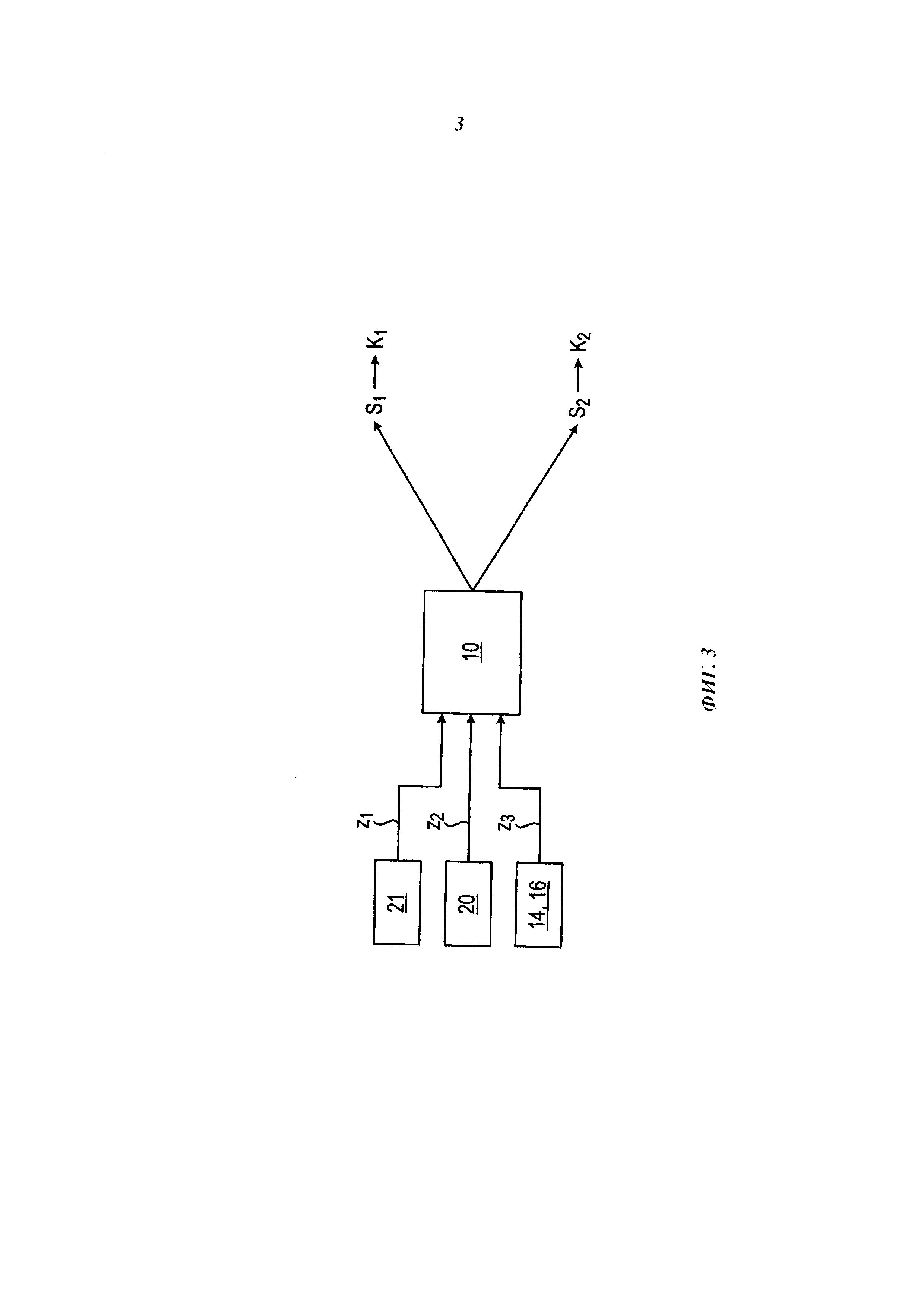
Фигура 3: функциональная схема управления.
Осуществление изобретения
На фигуре 1 схематично изображена описываемая изобретением сцепка 1 тягового транспортного средства, выполненного в виде трактора 2, с буксируемой им сельскохозяйственной уборочной машиной, выполненной в виде тюкового пресс-подборщика 3, во время движения по полю. Вместо пресс-подборщика 3 может быть использована другая буксируемая уборочная машина, оснащенная рабочим агрегатом для подачи и/или обработки убираемой культуры 18, например, тележка-погрузчик.
Пресс-подборщик 3 содержит различные рабочие агрегаты 4, 5, 6, 7, предназначенные для подачи и/или обработки убираемой культуры. Спереди находится подборщик 4, захватывающий с поля выложенную валком убираемую культуру 18, собирающий ее сбоку и направляющий ее в канал пресс-подборщика 3 для дальнейшей обработки. После этого убранную культуру 18 пропускают через режущее устройство 5, оснащенное режущим ротором, и предварительно уплотняют сгребающим устройством 6, периодически выполняющим операции сбора и наполнения. При этом убранная культура порциями (при каждом ходе наполнения сгребающего устройства 6) поступает в прессовальную камеру, в которой возвратно-поступательно движущийся поршень 7 пресса прессует убранную культуру 18 в тюки 19. Готовые тюки 19 выбрасывают из пресс-подборщика 3 с задней стороны.
Рабочие агрегаты 4, 5, 6, 7 пресс-подборщика 3 получают приводную мощность от трактора 2 посредством приводного вала 8 (в данном случае - изогнутого карданного вала), соединенного с валом 24 отбора мощности в задней части трактора 2. Для этого трактор 2 оснащают приводным двигателем 9, который можно соединять с валом 24 отбора мощности с возможностью передачи крутящего момента, то есть, приводной двигатель 9 трактора 2, вал 24 отбора мощности и приводной вал 8 образуют приводную систему пресс-подборщика 3. Для ответвления мощности, переданной на пресс-подборщик 3, на отдельные рабочие агрегаты пресс-подборщика 3 служат редукторы, не показанные на фигуре.
Приводной двигатель 9 трактора 2 обычным для себя образом входит в состав приводной системы ходового привода трактора 2, то есть, служит для привода колес трактора 2. В зависимости от частоты вращения приводного двигателя 9 и выбранного передаточного числа трактор 2 тянет пресс-подборщик 3 по полю с указанной стрелкой скоростью v движения, заданной регулятором 17 движения.
В представленном варианте исполнения к пресс-подборщику 3 подсоединено управляющее устройство 10, соединенное с трактором 2 системой 13 шин передачи данных, предпочтительно, ISOBUS, с целью обмена данными. В частности, для этого в кабине 12 водителя трактора 2 установлен легкодоступный для водителя пульт 11 управления, способный обмениваться данными с управляющим устройством 10 через систему 13 шин передачи данных. Пульт 11 управления, помимо органов управления, содержит индикатор, служащий, например, для отображения рабочих параметров. Кроме того, управляющее устройство 10 соединено системой 12 шин передачи данных с регулятором 17 движения трактора 2 и, таким образом, может влиять на него. Регулятор 17 движения путем активизации приводного двигателя 9 и редуктора ходового механизма (не показанного на фигуре) может влиять на скорость v движения. При помощи соединения по сигнальному проводу между управляющим устройством 10 и регулятором 17 движения управляющее устройство 10 уборочной машины 3 может задавать скорость v движения трактора 2.
Кроме того, к приводному двигателю 9 трактора 2 присоединен датчик 15 нагрузки. Он позволяет определять текущую нагрузку (например, приложенный крутящий момент) приводного двигателя 9. Кроме того, трактор 2 оснащен рулевым механизмом с рулевым колесом 22, расположенным в кабине водителя. Угол z3 поворота, заданный рулевым колесом 22, определяется датчиком 21 угла поворота рулевого колеса. Кроме того, на крыше кабины 12 водителя установлен спутниковый датчик 20 положения. Он позволяет определять положение z2 трактора 2 или, с учетом смещения (при известном расстоянии между трактором 2 и пресс-подборщиком 3, а также известном направлении движения) относительно трактора 2, также положение пресс-подборщика 3.
Как уже говорилось, пресс-подборщик 3 содержит различные подающие и/или рабочие агрегаты. Для распознавания захвата пресс-подборщиком 3 убираемой культуры 18 на пресс-подборщик 3 установлены две различные системы распознавания. Первая система предусматривает оснащение приводимого рабочего органа (барабана подборщика, на фигуре 1 без обозначения) подборщика 4 датчиком 16 нагрузки. На основании сигнала z3 нагрузки (например, определения крутящего момента) датчика 16 нагрузки можно судить о том, захватывает ли пресс-подборщик 3 в данный момент убираемую культуру 18 и если да, то в какой мере. Подобный датчик можно также установить на другой орган пресс-подборщика 3, транспортирующий убранную культуру 18, с целью определения захвата убранной культуры. Вторая система предусматривает оснащение пресс-подборщика 3 камерой 14. Эта камера 14 расположена под дышлом пресс-подборщика 3 и ориентирована таким образом, чтобы она могла снимать область, расположенную непосредственно перед подборщиком 4. Соответствующий анализ видеоряда, снятого камерой 14, позволяет судить о том, захватывает ли пресс-подборщик 3 убираемую культуру 18 и если да, то в какой мере.
Взаимодействие сцепки и цели, которые могут быть достигнуты ею согласно изобретению, раскрываются ниже на основании фигуры 2.
На фигуре 2 представлено схематичное изображение сцепки 1 трактора 2 с буксируемым им пресс-подборщиком 3, вид сверху, в различных ситуациях при работе на поле. Под сцепкой 1 согласно фигуре 2 можно понимать, например, сцепку 1, изображенную на фигуре 1 и описанную выше.
В соответствии с изображением на фигуре 2, сцепка 1 движется вдоль колеи 23 и при этом проходит пять последовательных путевых точек а, b, c, d, е. Колея 23 имеет форму перевернутой буквы U и пересечена пунктирной вспомогательной линией. Область под пунктирной вспомогательной линией соответствует участку поля, который подлежит обработке сцепкой 1, и на котором параллельными валками выложена убираемая культура 18. Задачей процесса уборки является захват выложенной таким образом убираемой культуры 18 пресс-подборщиком 3 и прессование культуры 18 в тюки 19 (см. фиг. 1).
Область над пунктирной вспомогательной линией (см. фиг. 2) соответствует так называемому концу поля (или «поворотной полосе»). В этой части поля культура отсутствует или уже убрана. Для сцепки 1 поворотная полоса важна тем, что она предоставляет достаточно места для того, чтобы сцепка 1 после прохождения первого валка (мимо путевой точки а) могла описать дугу и развернуться, чтобы после этого продолжить уборку следующего валка (мимо путевой точки е).
В то время как первая путевая точка а и последняя путевая точка е колеи 23, изображенной на фигуре 2, находятся на подлежащем уборке участке поля (ситуация S1 уборки), путевые точки b-d находятся в области конца поля (ситуация S2 конца поля).
При переходе от ситуации S1 уборки к ситуации S2 конца поля обычно необходимо изменять множество параметров на тракторе и пресс-подборщике. Для осуществления показанного на фигуре 2 маневра разворота в конце поля водитель трактора 2 должен контролировать множество параметров трактора 2 и пресс-подборщика 3, чтобы одновременно выполнять различные операции. Например, опытный водитель при достижении конца поля одновременно изменяет скорость движения, поднимает подборщик и направляет трактор в поворот. Кроме того, он может дополнительно снизить частоту вращения вала отбора мощности, чтобы сэкономить топливо. После проезда конца поля водитель выполняет обратные операции, чтобы продолжить уборку. Все это требует внимательности, мастерства и опыта.
Для снижения нагрузки на водителя и улучшения согласованности машин описываемая изобретением сцепка отличается наличием устройств 10, 14, 16, 20, 21, предназначенных для распознавания того, находится ли уборочная машина 3 в ситуации S1 уборки или ситуации S2 конца поля, и управляющего устройства 10, которое может быть применено для задания, по меньшей мере, одного параметра, по меньшей мере, одного функционального устройства 4, 5, 6, 7, 9, 17, 24 сцепки 1, с которым сцепку 1 можно эксплуатировать в уборочной конфигурации K1 или конфигурации К2 конца поля в зависимости от распознанной ситуации S1, S2.
В сцепке 1, изображенной на фигуре 2 и обладающей признаками сцепки, описанной в связи с фигурой 1, распознавание ситуации S1 уборки или ситуации S2 конца поля осуществляют в соответствии с фигурой 3, пояснения к которой даны ниже:
На фигуре 3 изображена примерная функциональная схема управляющего устройства 10, применяемого на сцепке 1. В данном случае управляющее устройство 10 содержит три параллельных сигнальных входа. Первый вход относится к датчику 21 угла поворота рулевого колеса. Этот датчик определяет угол z1 поворота трактора 2 и передает его на управляющее устройство 10. Второй вход относится к датчику 20 положения. Он определяет положение z2 трактора 2 и передает его на управляющее устройство 10. Третий вход относится к устройству определения состояния захвата убираемой культуры. Устройство содержит датчики двух типов: камеру 14 и датчик 16 нагрузки, установленный на подборщике 4. Датчики определяют состояние z3 захвата убираемой культуры в уборочной машине 3 и передают его на управляющее устройство 10. Таким образом, управляющее устройство 10 получает, по меньшей мере, три входных сигнала z1, z2, z3, описывающих состояние сцепки 1 (возможны и другие сигнальные входы).
На основании, по меньшей мере, одного из этих состояний управляющее устройство 10 может определить, находится ли уборочная машина 3 в ситуации S1 уборки или ситуации S2 конца поля. Например, ситуацию S2 конца поля можно распознать по превышению определенного угла z1 поворота в течение определенного минимального промежутка времени или по отсутствию захвата убираемой культуры 18 (состояния z3 захвата убираемой культуры) в течение определенного минимального промежутка времени. В качестве альтернативы или дополнения на основании положения z2 можно определять, достиг ли трактор 2 конца S2 поля. И наоборот, ситуацию S1 уборки можно распознать по тому, что определенный угол z1 поворота в течение определенного минимального промежутка времени более не превышается, или что захват убираемой культуры 18 (состояние z3 захвата убираемой культуры) имеет место в течение определенного минимального промежутка времени. В качестве альтернативы или дополнения на основании положения z2 можно определять, выехал ли трактор 2 с конца S2 поля и может ли он продолжать уборку (S1). Разумеется, возможен вариант, в котором сцепка 1 будет оснащена только первой или второй из названных систем распознавания. В альтернативном варианте можно также использовать другую систему распознавания, служащую той же цели.
Когда управляющее устройство 10 распознает переход в другую ситуацию S1, S2 (ср. фиг. 3), оно инициирует переход в подходящую конфигурацию К1 или К2. При этом управляющее устройство 10 сцепки 1 задает один или, в частности, несколько параметров, относящихся, в частности, к одной из следующих величин: скорость v1 или v2 движения сцепки 1, угол z1 поворота тягового транспортного средства 2, передаточное число ходового привода тягового транспортного средства 2, частота вращения вала 24 отбора мощности тягового транспортного средства 2, передаточное число вала 24 отбора мощности, высота подборщика 4, состояние привода подборщика 4, ротора 5, сгребающего устройства 6 и/или поршня 7 пресса уборочной машины 3. В результате сцепка будет эксплуатироваться во время уборки S1 в конфигурации К1, а на конце S2 поля в конфигурации К2. При этом для водителя выгодно то, что переключение между конфигурациями К1, К2осуществляется автоматически. Таким образом, водителю не нужно выполнять множество регулирующих операций. Кроме того, управление переключением между конфигурациями К1, К2 осуществляется в зависимости от событий, то есть, не по времени, а по фактическому изменению уборочной ситуации S1, S2.
Как уже упоминалось, при переключении между конфигурациями К1, К2 можно учитывать различные параметры. В особенно целесообразном варианте исполнения изобретения управляющее устройство 10 задает скорость v1, v2 движения сцепки 1 как при работе в уборочной конфигурации K1, так и при работе в конфигурации К2 конца поля. Таким образом, водитель полностью освобожден от контроля и регулировки скорости движения.
В следующем выгодном варианте исполнения управляющее устройство 10 при распознавании ситуации S2 конца поля самостоятельно инициирует выполнение одной или нескольких операций (к которым может, в частности, относиться: задание скорости v2 движения, подъем подборщика 4, уменьшение частоты вращения вала 24 отбора мощности, остановка привода устройства 4, 5, 6, 7 транспортировки и/или обработки культуры, разблокировка управляемого моста уборочной машины 3), чтобы перевести сцепку 1 в конфигурацию К2 конца поля.
В частности, как показано на фигуре 2, возможен вариант, в котором во время работы в конфигурации К2 конца поля управляющее устройство 10 задает для сцепки 1 скорость v2 движения, соответствующую определяемому пользователем значению или значению, полученному, в частности, управляющим устройством 10 на основании характеристики поворотной полосы в каждом конкретном случае.
При распознавании ситуации S1 уборки возможен, в частности, вариант, в котором управляющее устройство 10 самостоятельно инициирует выполнение одной или нескольких операций (к которым может, в частности, относиться: задание скорости v1 движения, опускание подборщика 4, увеличение частоты вращения вала 24 отбора мощности, запуск привода устройства 4, 5, 6, 7 транспортировки и/или обработки культуры, блокировка управляемого моста уборочной машины 3), чтобы перевести сцепку 1 в уборочную конфигурацию К1.
В следующем выгодном варианте исполнения управляющее устройство 10 во время работы в уборочной конфигурации К1 задает для сцепки 1 скорость v1 движения в зависимости от текущих измеренных рабочих параметров уборочной машины 3 и тягового транспортного средства 2.
Иными словами, в уборочной конфигурации К1 скорость задают (посредством «v1») на основании постоянно определяемых рабочих параметров трактора 2 и пресс-подборщика 3 и постоянно адаптируют к соответствующим условиям уборки и машины. Для этого с управляющим устройством 10 могут быть связаны дополнительные сигнальные входы (не показанные по отдельности), причем, по меньшей мере, поступающие с трактора 2 сигналы, предпочтительно, передаются по шине 13 данных на управляющее устройство 10. Таким образом, становятся ненужными кабельные соединения между трактором 2 и пресс-подборщиком 3, за исключением шинного кабеля. Трактор 2 оснащен, например, датчиком 15 нагрузки приводного двигателя 9. Определенную таким образом текущую нагрузку двигателя передают по шине 13 данных на управляющее устройство 10. Выгодным образом, можно также передавать на управляющее устройство 10 текущую скорость движения и/или текущее передаточное число ходового привода трактора 2 или прочие эксплуатационные параметры двигателя/редуктора. Можно легко реализовать прием управляющим устройством 10 по шине 13 данных прочих рабочих параметров трактора 2, важных для задания скорости v1 движения. Пресс-подборщик 3, выгодным образом, оснащен несколькими датчиками, определяющими различные рабочие параметры пресс-подборщика 3. Таким датчиком может быть, например, датчик 16 нагрузки, служащий для определения нагрузки отдельных рабочих агрегатов, в частности, подборщика 4, режущего устройства 5, сгребающего устройства 6, поршня 7 пресса. Путем определения скорости, приводного момента или рабочего давления отдельных компонентов машины (барабана подборщика, режущего ротора, кривошипа сгребающего устройства) датчики или косвенно определяют нагрузку соответствующих рабочих агрегатов. Так как управляющее устройство 10 постоянно принимает значения измеренных рабочих параметров, оно способно задавать скорость v1 движения в зависимости от условий уборки и резерва мощности трактора 2 и пресс-подборщика 3.
Описанная сцепка 1 имеет ряд преимуществ. Во-первых, повышается удобство водителя, так как ему не нужно одновременно контролировать и регулировать несколько параметров. Во-вторых, автоматическая настройка параметров позволяет сократить время, затрачиваемое на прохождение поворотной полосы, в результате чего повышается коэффициент использования машины в целом. Кроме того, выполнение предложенных операций на поворотной полосе, в частности, снижение частоты вращения вала отбора мощности и временная остановка рабочих агрегатов (сгребающего устройства, ротора, подборщика), способствует экономии топлива.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
Реферат
Изобретение относится к сцепке тягового транспортного средства. Сцепка трактора и движимой им сельскохозяйственной уборочной машины содержит средства, предназначенные для распознавания того, находится ли уборочная машина в ситуации уборки или ситуации конца поля, и управляющее устройство, выполненное с возможностью задания настройки параметра функционального устройства сцепки, который обеспечивает эксплуатацию сцепки в уборочной конфигурации или конфигурации конца поля в зависимости от распознанной ситуации. С управляющим устройством соединено устройство распознавания, выполненное с возможностью определения состояния сцепки, в частности угла поворота тягового транспортного средства. Управляющее устройство выполнено с возможностью определения, на основании состояния, находится ли уборочная машина в ситуации уборки или в ситуации конца поля. Достигается возможность освобождения водителя от выполнения задач по контролю и регулировке, которые нужно осуществлять на сцепке при переходе от режима уборки к режиму движения в конце поля. 14 з.п. ф-лы, 3 ил.
Комментарии