Изотропный гармонический осциллятор и соответствующий регулятор с отсутствующим спусковым механизмом или с упрощенным спусковым механизмом - RU2686869C2
Код документа: RU2686869C2
Чертежи

Описание
Ссылка на связанные заявки
Даты приоритета данной заявки определяются датами подачи заявки ЕР 14150939.8, поданной 13.01.2014, ЕР 14173947.4, поданной 25.06.2014, ЕР 14183385,5, поданной 3.09.2014, ЕР 14183624.7, поданной 4.09.2014, и ЕР 14195719.1, поданной 1.12.2014. Содержание всех указанных заявок, поданных заявителем настоящего изобретения, полностью включено в данное описание посредством ссылки.
Уровень техники
1. Контекст
Самым крупным вкладом в точность измерения времени стало введение осциллятора в качестве регулятора хода, сначала в форме маятника, введенного Христианом Гюйгенсом в 1656 г., а затем баланса со спиральной пружиной, введенного Гюйгенсом и Гуком около 1675 г., и камертона, введенного Н. Ньоде (N. Niaudet) и Луи Бреге (L.С. Breguet) в 1866 г. (см. ссылки [20] и [5]). С тех пор во всех наручных часах и во всех других механических часах использовались только механические осцилляторы (балансы с электромагнитной восстанавливающей силой, аппроксимирующей спиральную пружину, включены в данном контексте в категорию схем балансирное колесо - спиральная пружина). В наручных часах и в других механических часах эти осцилляторы требуют использования спускового механизма, наличие которого создает многочисленные проблемы из-за присущей ему сложности и относительно низкой эффективности, которая в лучшем случае едва достигает 40%. Низкая эффективность спусковых механизмов является неизбежной, поскольку они основаны на прерывистом движении, т.е. все движение должно быть остановлено, а затем возобновлено, что приводит к затратному ускорению из состояния покоя и к шуму вследствие соударений. Хорошо известно, что спусковые механизмы представляют собой самую сложную и чувствительную часть наручных часов, и, в отличие от спускового механизма морского хронометра, для наручных часов так и не удалось разработать удовлетворительный спусковой механизм.
Швейцарский патент №113025, опубликованный 16.12.1925, описывает способ приведения в действие колебательного механизма. Решаемая задача, отмеченная в данном документе, состоит в замене дискретной регулировки непрерывной регулировкой, однако, не пояснено, как применить сформулированные принципы к прибору для измерения времени, такому как часы. В частности, представленные конструкции не рассматривались как изотропные гармонические осцилляторы, а описанные архитектуры не обеспечивают планарного движения колеблющейся (осциллирующей) массы, как это предлагается изобретением.
Швейцарская патентная заявка №9110/67, опубликованная 27.06.1967, описывает вращающийся резонатор к прибору для измерения времени. Описанный резонатор содержит две массы, установленные консольно на центральной опоре, причем каждая масса осциллирует по окружности вокруг оси симметрии. Каждая масса связана с центральной опорой посредством четырех пружин. Пружины, ассоциированные с каждой массой, соединены одна с другой, чтобы обеспечить для массы динамическую связь. Чтобы поддерживать осциллирующее вращение масс, используется электромагнитное устройство, воздействующее на дужки каждой массы, снабженные постоянным магнитом. Одна из пружин снабжена собачкой для взаимодействия с храповым колесом, чтобы преобразовывать осциллирующее движение масс в однонаправленное вращательное движение. Следовательно, описанная система все еще основана на преобразовании осцилляции, являющейся прерывистым движением, во вращение посредством собачки. Это делает спусковую систему, описанную в данном документе, эквивалентной спусковому механизму вышеупомянутой системы, известной из уровня техники.
Дополнительный швейцарский патент №512757, опубликованный 14.05.1971, относится к механическому вращающемуся резонатору прибора для измерения времени. В данном патенте, в основном, описываются пружины, используемые в этом резонаторе так, как это описано в швейцарской патентной заявке №9110/67, рассмотренной выше. В этом случае резонатор также использует массу, осциллирующую вокруг оси.
В патенте США №3318087, опубликованном 9.05.1967, раскрыт торсионный осциллятор, который осциллирует вокруг вертикальной оси. Это решение также аналогично рассмотренному выше спусковому механизму, известному из уровня техники.
Раскрытие изобретения
Задача, решенная изобретением, состоит в том, чтобы усовершенствовать известные системы и способы.
Еще одна задача состоит в создании системы, которая устраняет необходимость в прерывистом движении спусковых механизмов, известных из уровня техники.
Следующая задача заключается в том, чтобы предложить механический изотропный гармонический осциллятор.
Другая задача, решенная изобретением, состоит в создании осциллятора, пригодного для использования в различных приложениях, связанных с измерением времени, например в качестве: регулятора хода для хронографа или иного прибора для измерения времени (такого как наручные часы), акселерометра или регулятора скорости.
Изобретение решает также проблему спускового механизма путем полного его устранения или, альтернативно, путем создания семейства новых упрощенных спусковых механизмов, свободных от недостатков известных спусковых механизмов наручных часов.
Таким образом, изобретение предлагает упрощенный механизм, обладающий повышенной эффективностью.
В одном варианте изобретение относится к механическому изотропному гармоническому осциллятору по меньшей мере с двумя степенями свободы, поддерживающему массу, способную совершать орбитальное движение относительно неподвижного основания под воздействием пружин, обладающих изотропностью и обеспечивающих линейную восстанавливающую силу.
В одном варианте осциллятор может быть основан на планарном XY-пружинном блоке (планарной пружинной ступени), образующем (образующей) соединение с двумя степенями свободы, обеспечивающее возможность чисто поступательного движения способной совершать орбитальное движение (орбитальной) массы и, в результате, перемещаться по своей орбите при сохранении фиксированной ориентации.
В другом варианте каждый пружинный блок может содержать по меньшей мере две параллельные пружины.
В одном варианте каждый блок представляет собой составной пружинный блок с двумя последовательно установленными параллельными пружинными блоками.
В следующем варианте осциллятор может содержать по меньшей мере одну компенсирующую массу для каждой степени свободы с обеспечением динамической балансировки осциллятора. При этом массы движутся таким образом, что центр силы тяжести механизма в целом остается стационарным.
Изобретение относится также к осцилляторной системе, содержащей по меньшей мере два осциллятора типа описанного выше. В одном варианте система содержит четыре осциллятора.
В одном варианте каждый блок в составе осциллятора развернут относительно следующего за ним блока, а блоки установлены по параллельной схеме. Угол разворота предпочтительно составляет 45°, 90° или 180°.
В другом варианте каждый блок в составе осциллятора развернут относительно следующего за ним блока, а блоки установлены последовательно. Угол разворота предпочтительно составляет 45°, 90° или 180°.
В следующем варианте поступательное перемещение осциллятора по направлениям X и Y может быть заменено движением в обобщенных координатах, в которых координаты X и Y могут соответствовать вращению или поступательному перемещению.
В варианте изобретения осциллятор или осцилляторная система может содержать механизм для непрерывного снабжения осциллятора или осцилляторной системы механической энергией.
При этом указанный механизм для снабжения энергией прикладывает к осциллятору или к осцилляторной системе крутящий момент или дискретное усилие.
Согласно одному варианту механизм может содержать компонент с изменяемым радиусом, который вращается в шарнире относительно неподвижной рамки, и призматическое сочленение, которое обеспечивает для конца указанного компонента возможность вращения с изменяемым радиусом.
В одном варианте механизм может содержать неподвижную рамку, несущую ось кулисы, к которой прикладывается поддерживающий крутящий момент М, и кулису, прикрепленную к указанной оси и снабженную призматической прорезью. При этом к массе осциллятора или осцилляторной системы прикреплен жесткий палец, введенный в указанную прорезь.
В другом варианте механизм может содержать свободный спуск для прерывистой подачи на осциллятор механической энергии.
В следующем варианте свободный спуск содержит два параллельных зубца, прикрепленных к орбитальной массе. При этом один зубец смещает упор, способный шарнирно поворачиваться на пружине с освобождением спускного колеса, которое сообщает импульс другому зубцу, восстанавливая энергию, потерянную осциллятором или осцилляторной системой.
Изобретение относится также к прибору для измерения времени, такому как часы, содержащему в качестве регулятора хода описанный осциллятор или описанную осцилляторную систему.
Согласно одному варианту прибор для измерения времени представляет собой наручные часы.
Предлагается применить осциллятор или осцилляторную систему согласно изобретению в качестве регулятора хода в хронографе для измерения долей секунды, требующего дополнительно только мультипликативную систему зубчатых колес с расширенным диапазоном скоростей, например, для достижения частоты 100 Гц с целью обеспечения возможности измерения интервалов порядка 1/100 секунды.
Предлагается также применить осциллятор или осцилляторную систему согласно изобретению в качестве регулятора скорости для часов с боем или музыкальных и наручных часов, а также музыкальных шкатулок с целью устранения нежелательного шума и снижения энергопотребления, а также с целью повышения стабильности музыкального ритма или боя.
Эти и другие варианты изобретения далее будут описаны более подробно.
Краткое описание чертежей
Изобретение станет более понятным из нижеследующего описания и прилагаемых чертежей.
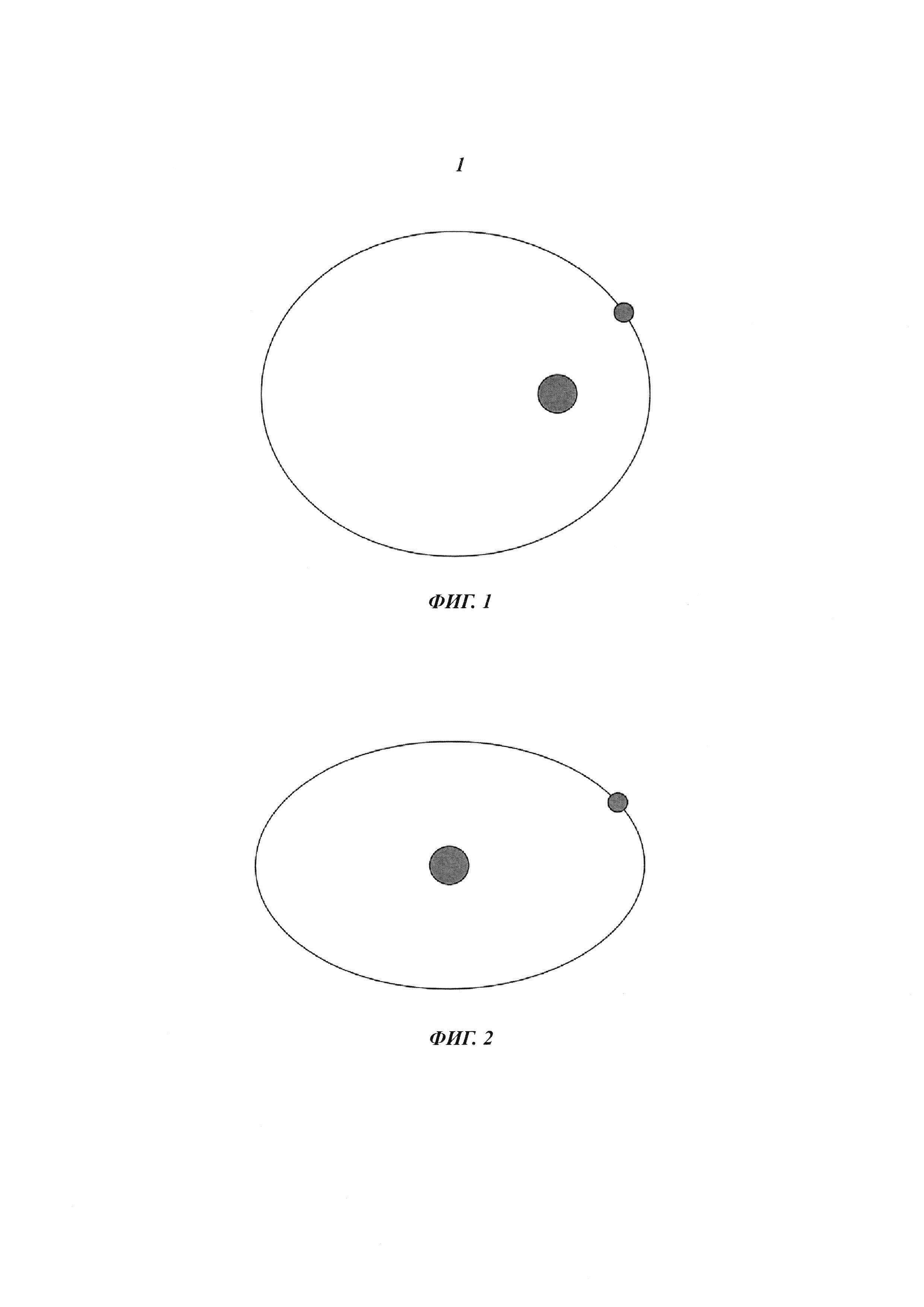
Фиг. 1 иллюстрирует орбиту в случае притяжения, обратно пропорционального квадрату расстояния.
Фиг. 2 иллюстрирует орбиту в соответствии с законом Гука.
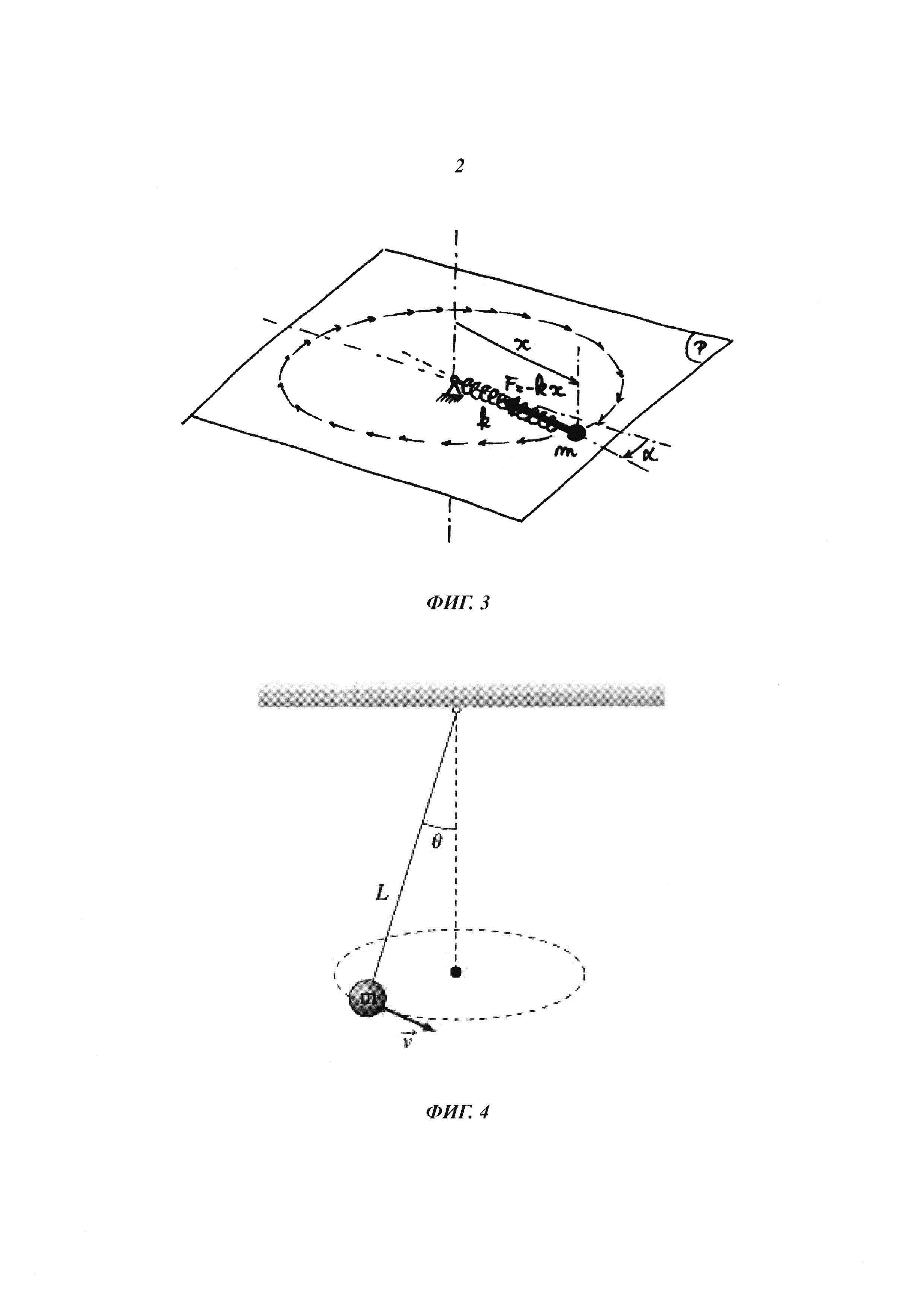
Фиг. 3 иллюстрирует пример физической реализации закона Гука.
Фиг. 4 иллюстрирует принцип конического маятника.
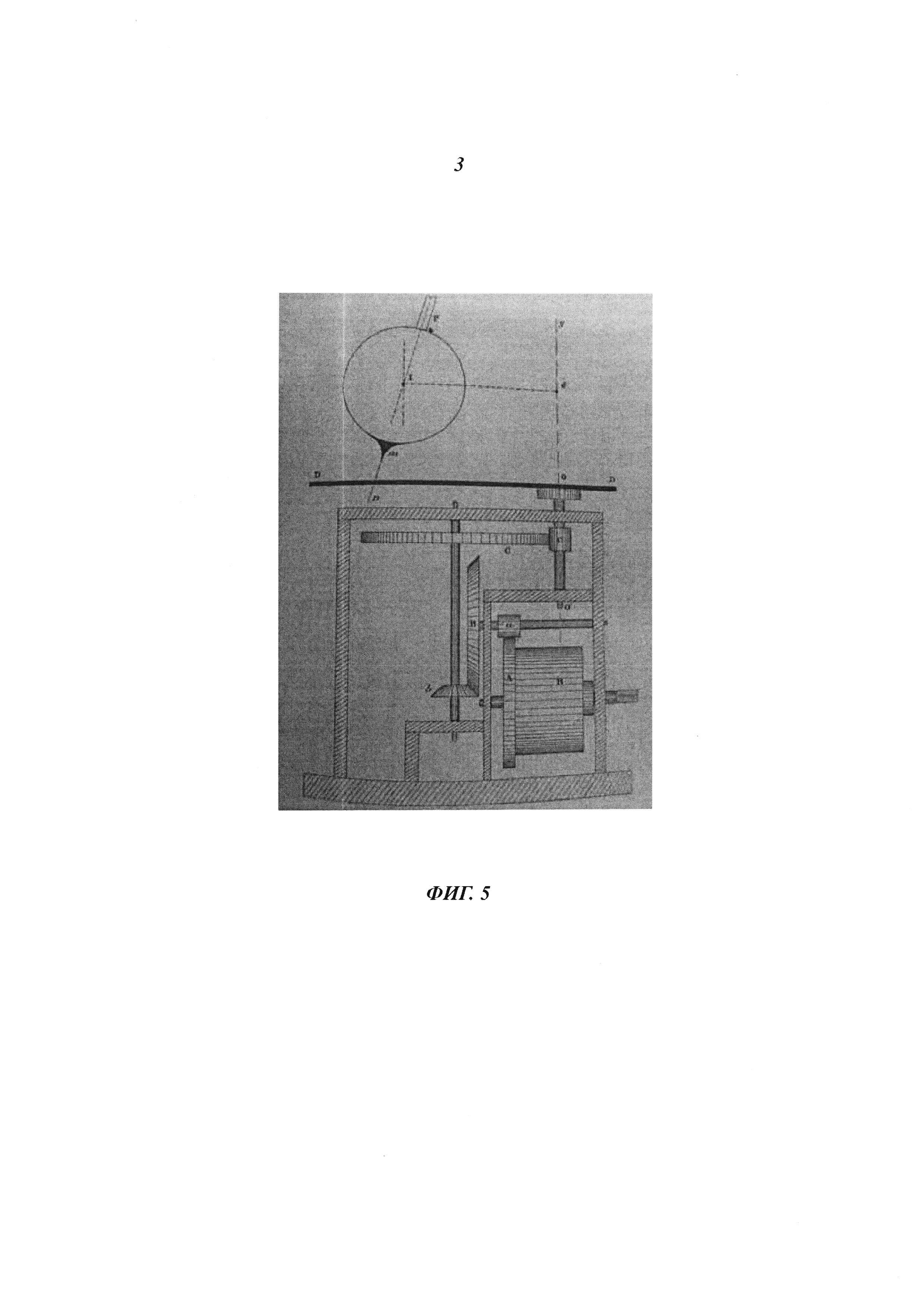
Фиг. 5 иллюстрирует механизм на основе конического маятника.
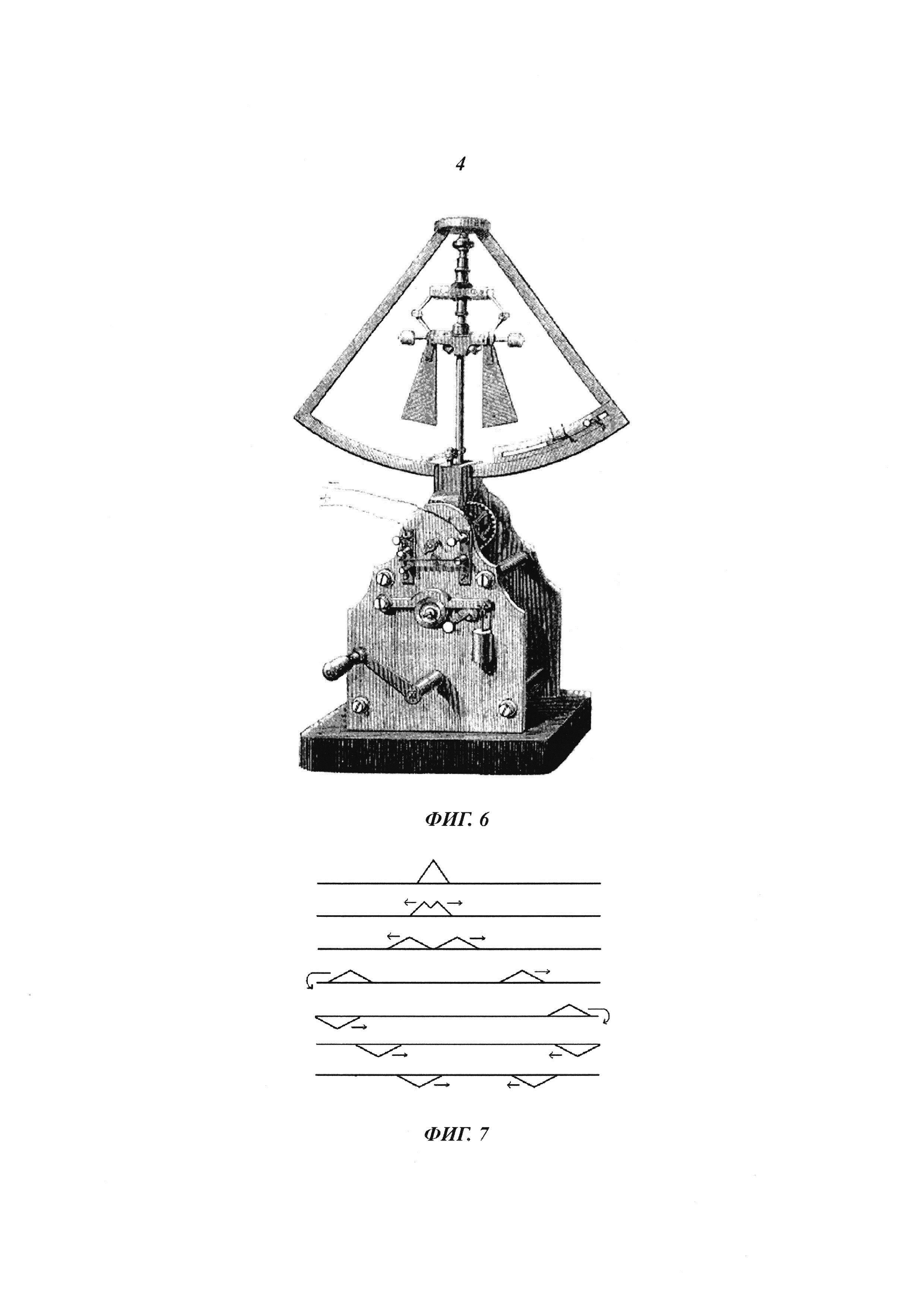
Фиг. 6 иллюстрирует регулятор Вилларсо, изготовленный Антуаном Бреге.
Фиг. 7 иллюстрирует распространение сингулярности по тронутой струне.
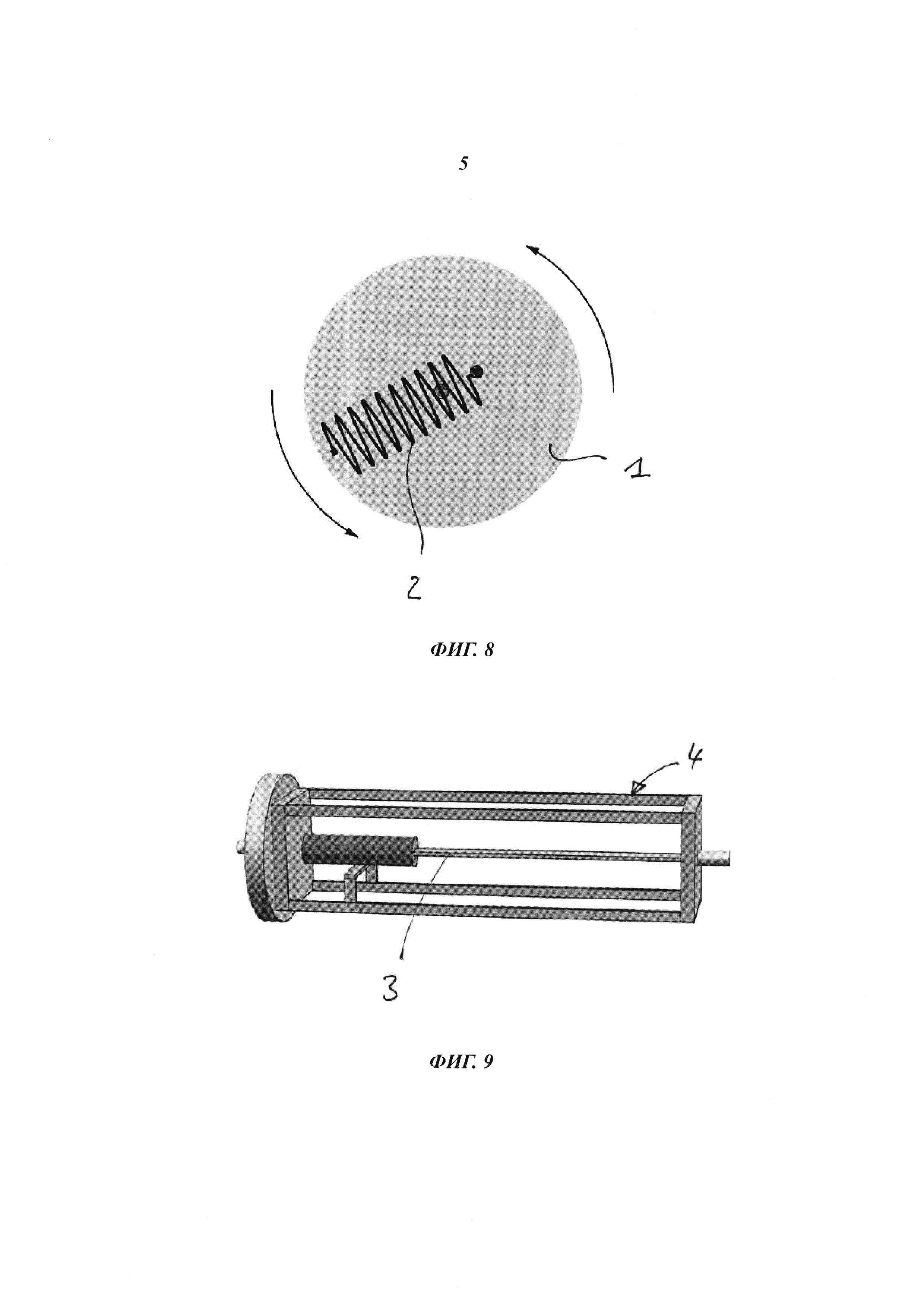
На фиг. 8 показана вращающаяся пружина на площадке.
Фиг. 9 иллюстрирует изотропный осциллятор с аксиальной пружиной и несущим ее компонентом.
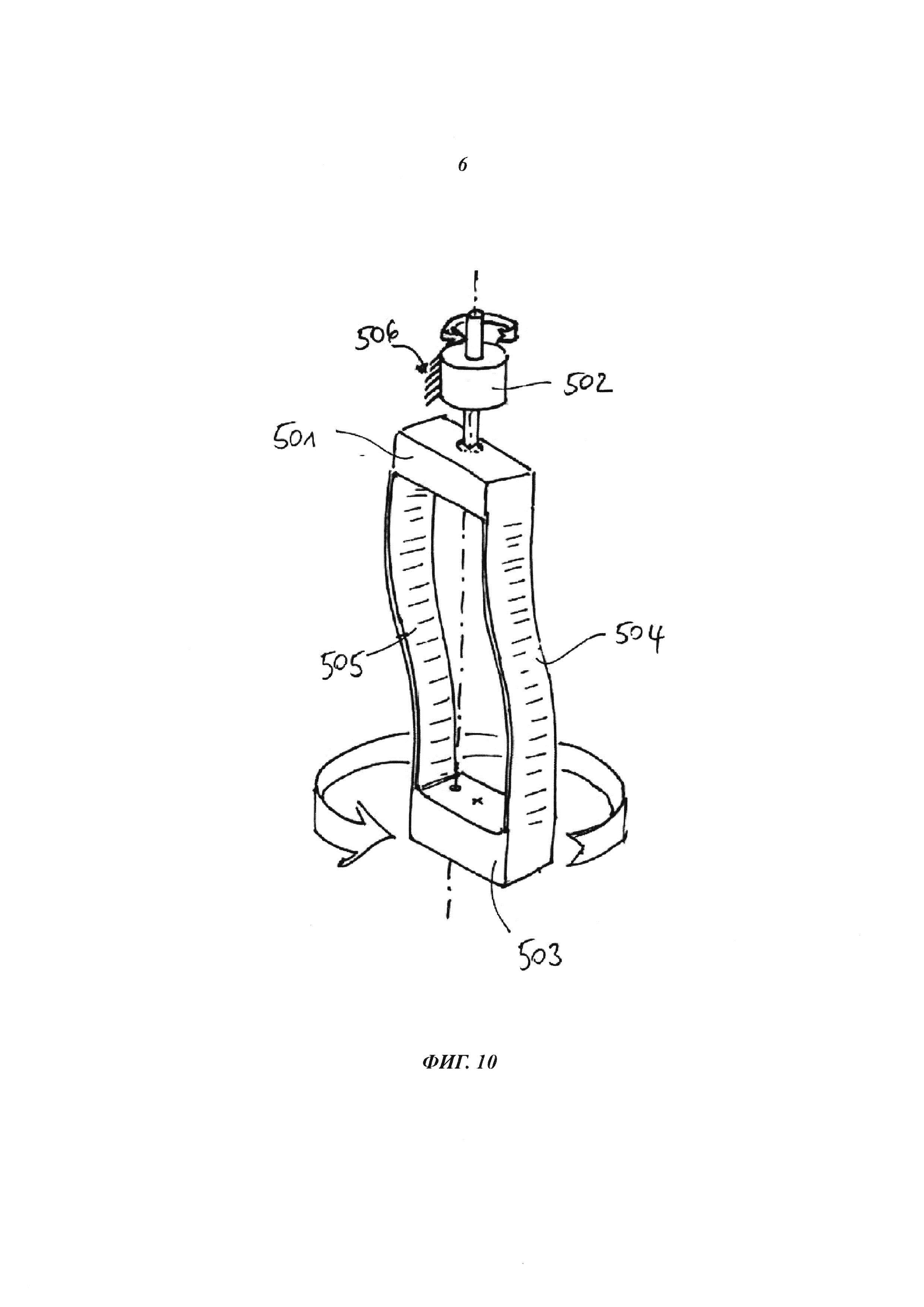
Фиг. 10 иллюстрирует изотропный осциллятор с двумя плоскими пружинами.
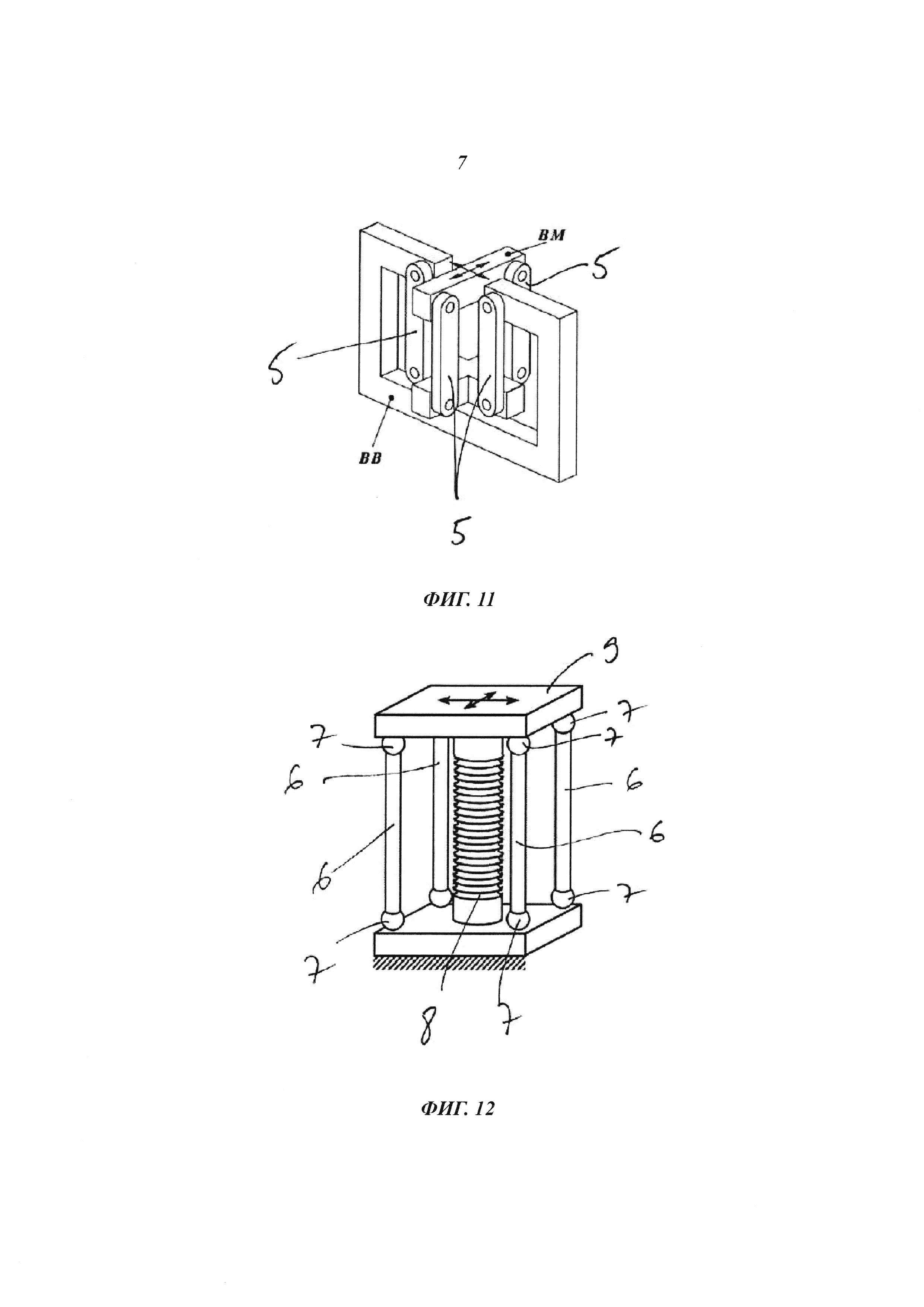
Фиг. 11 иллюстрирует XY-блок, содержащий два последовательных согласованных механизма с четырьмя стержнями.
Фиг. 12 иллюстрирует XY-блок, содержащий 4 параллельных стержня, связанных с 8 сферическими шарнирами, и сильфон, соединяющий подвижную платформу с основанием, а также монолитную конструкцию, основанную на гибких связях.
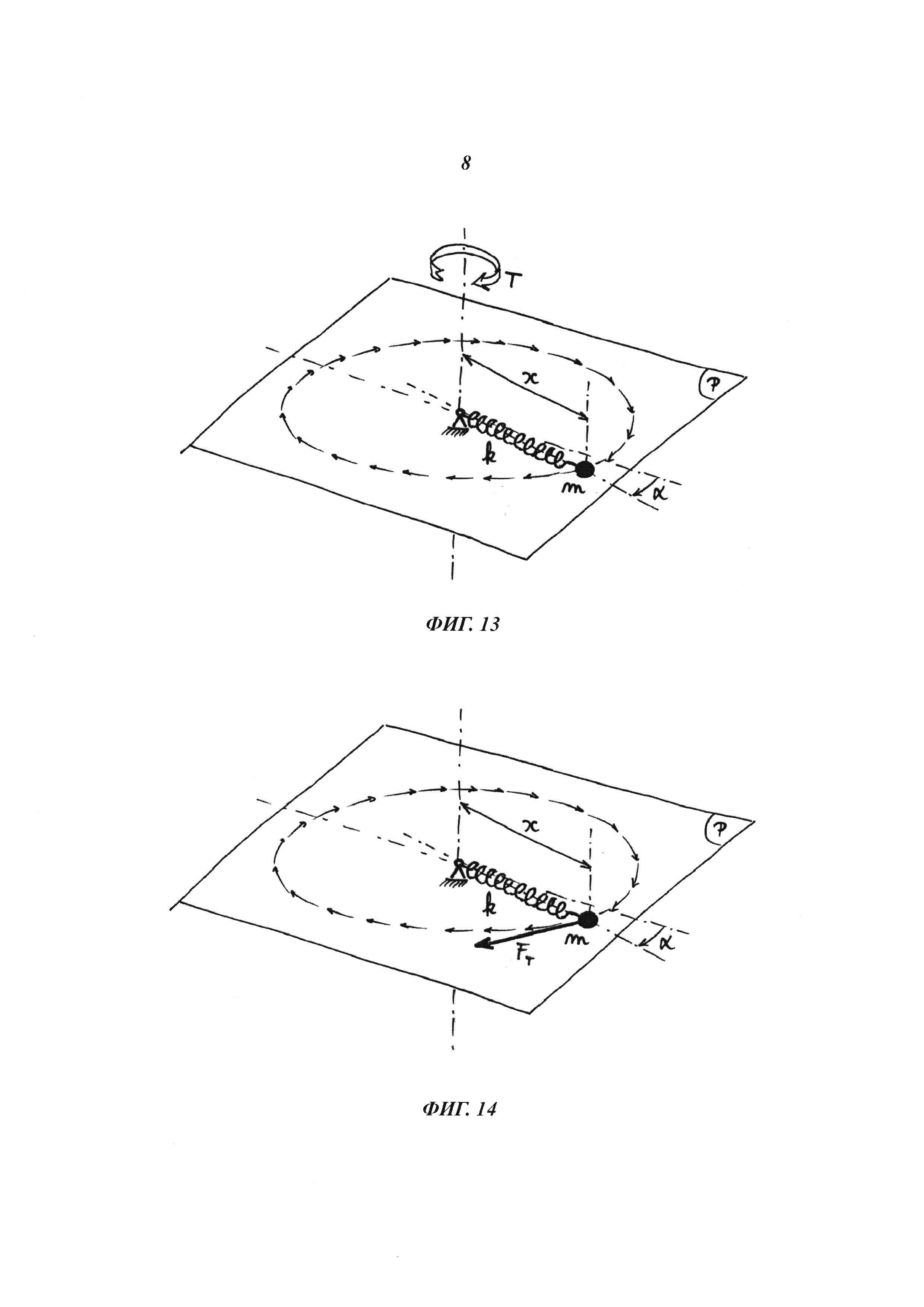
На фиг. 13 иллюстрируется принцип непрерывного приложения крутящего момента для поддержания энергии осциллятора.
Фиг. 14 иллюстрирует прерывистое приложение силы, чтобы поддерживать энергию осциллятора.
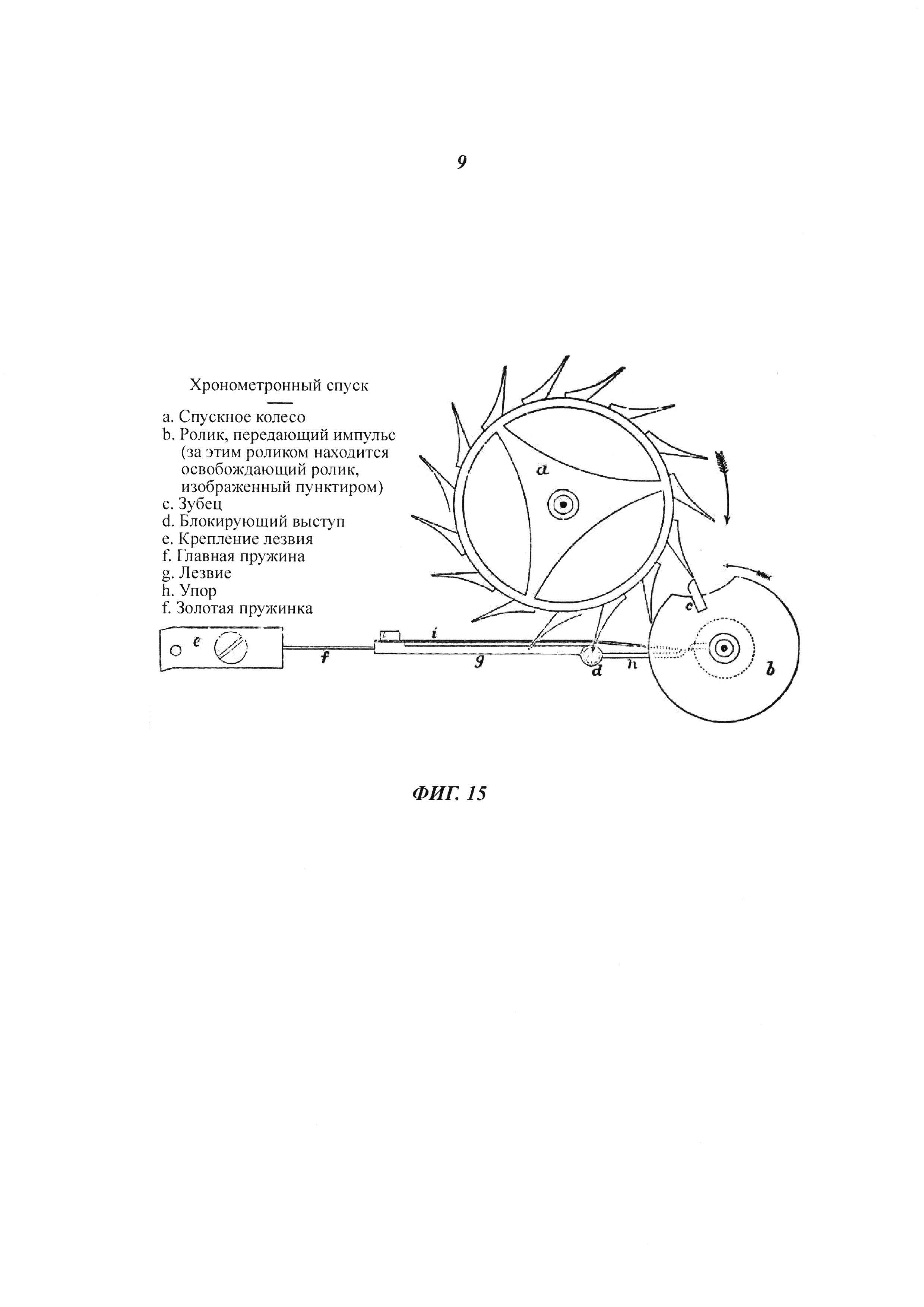
Фиг. 15 иллюстрирует классический свободный спуск.
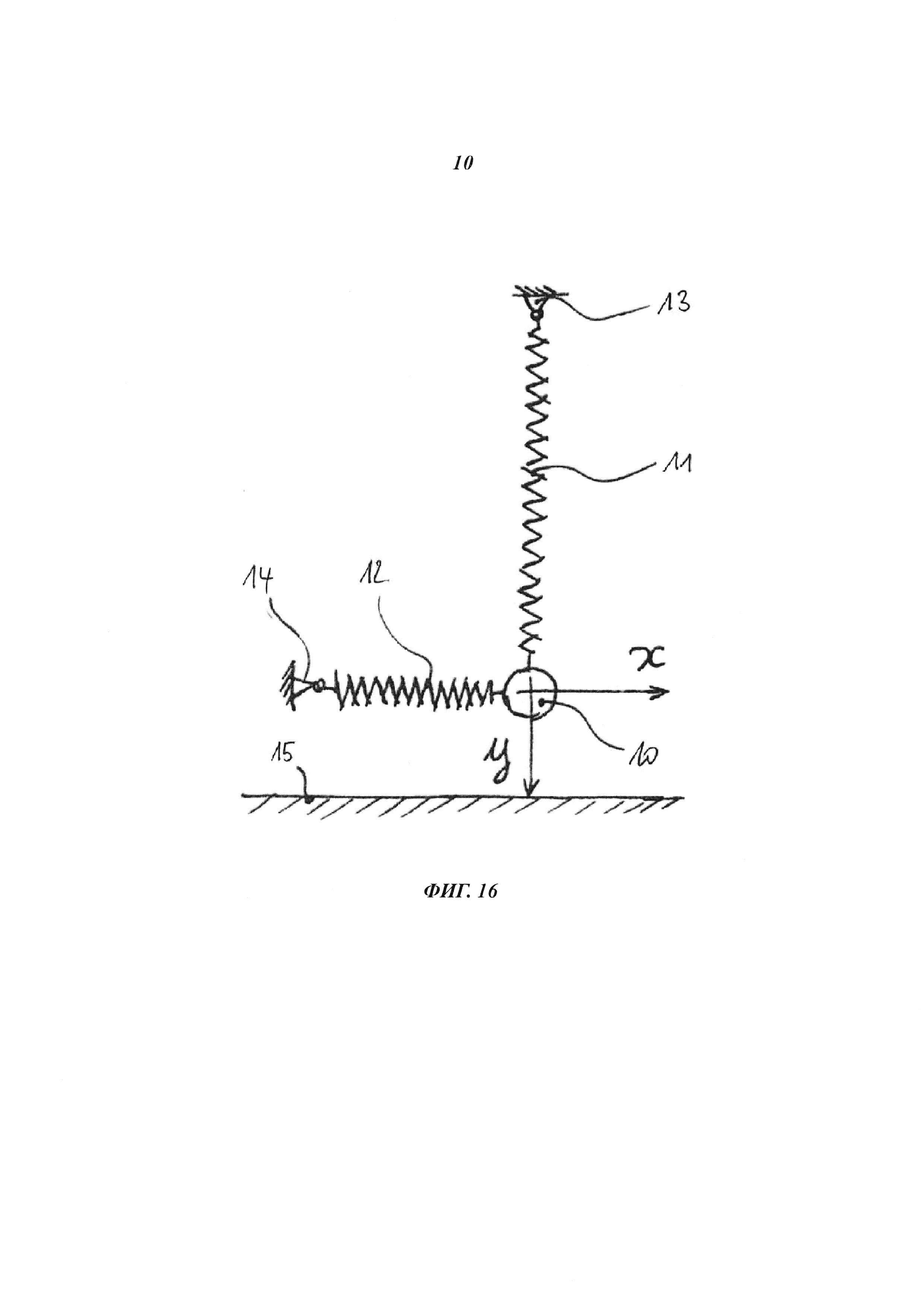
Фиг. 16 иллюстрирует простую планарную изотропную пружину.
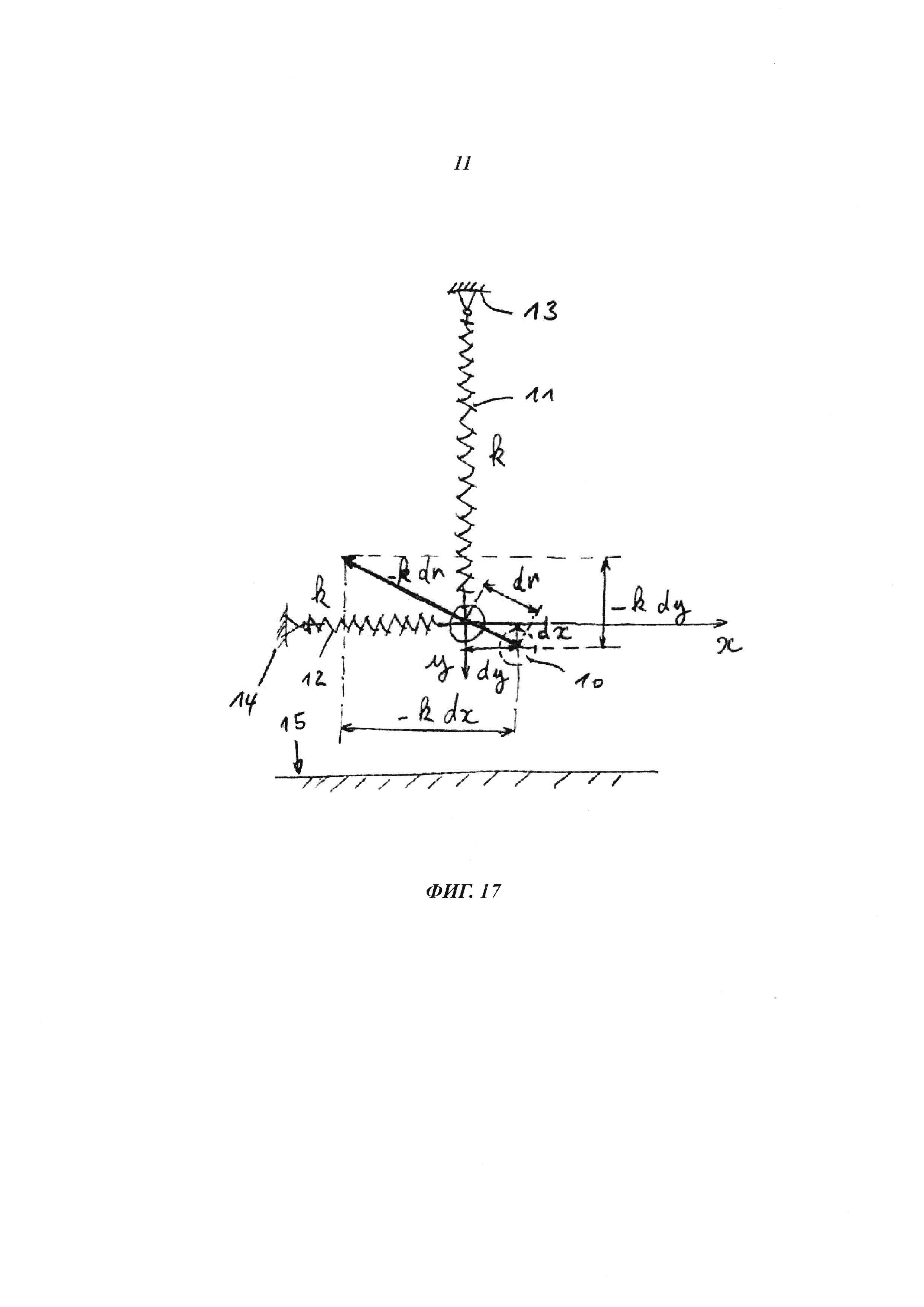
Фиг. 17 иллюстрирует пленарный изотропный закон Гука первого порядка.
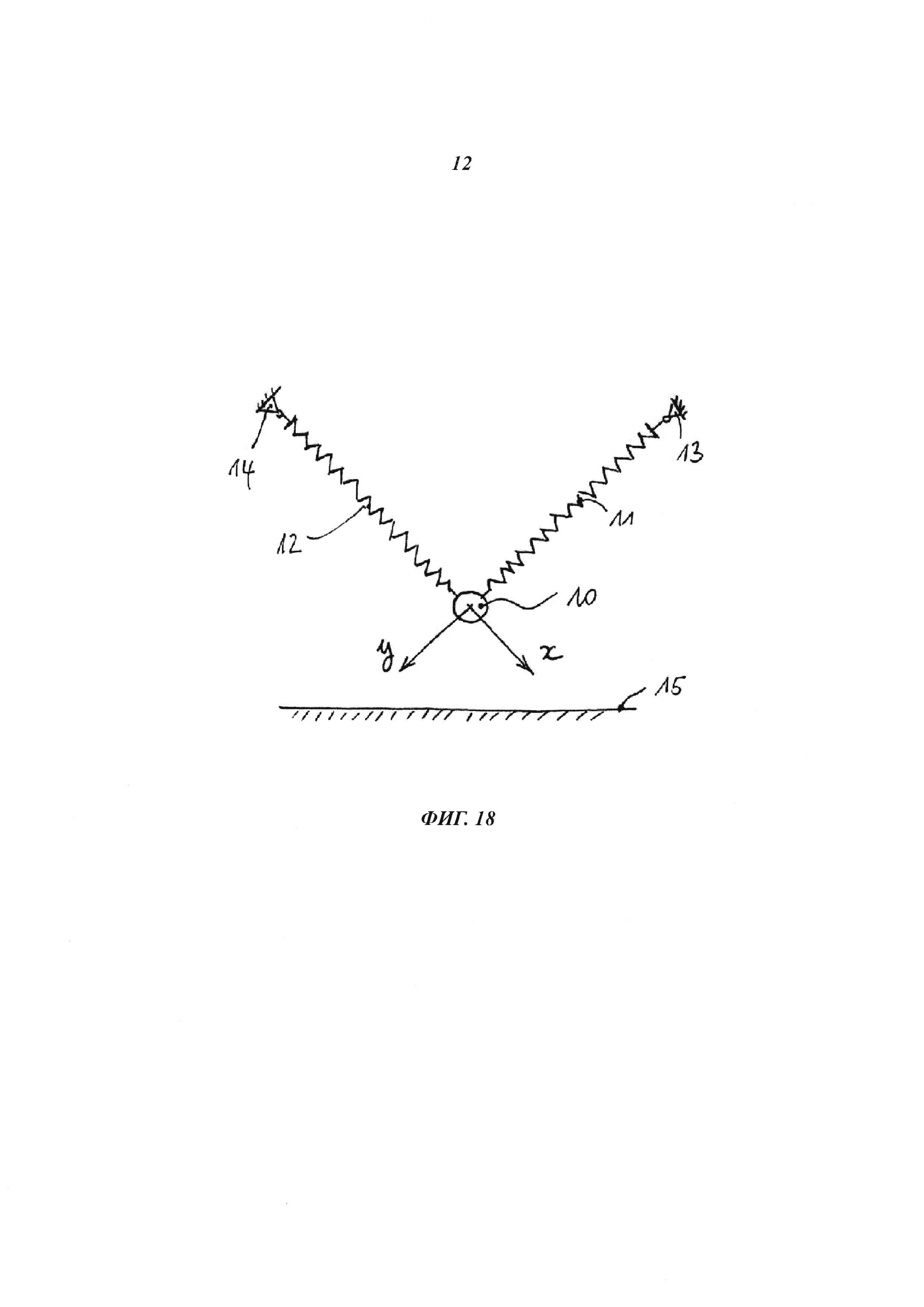
Фиг. 18 иллюстрирует альтернативную конструкцию простой планарной изотропной пружины с равным распределением силы тяжести между двумя пружинами.
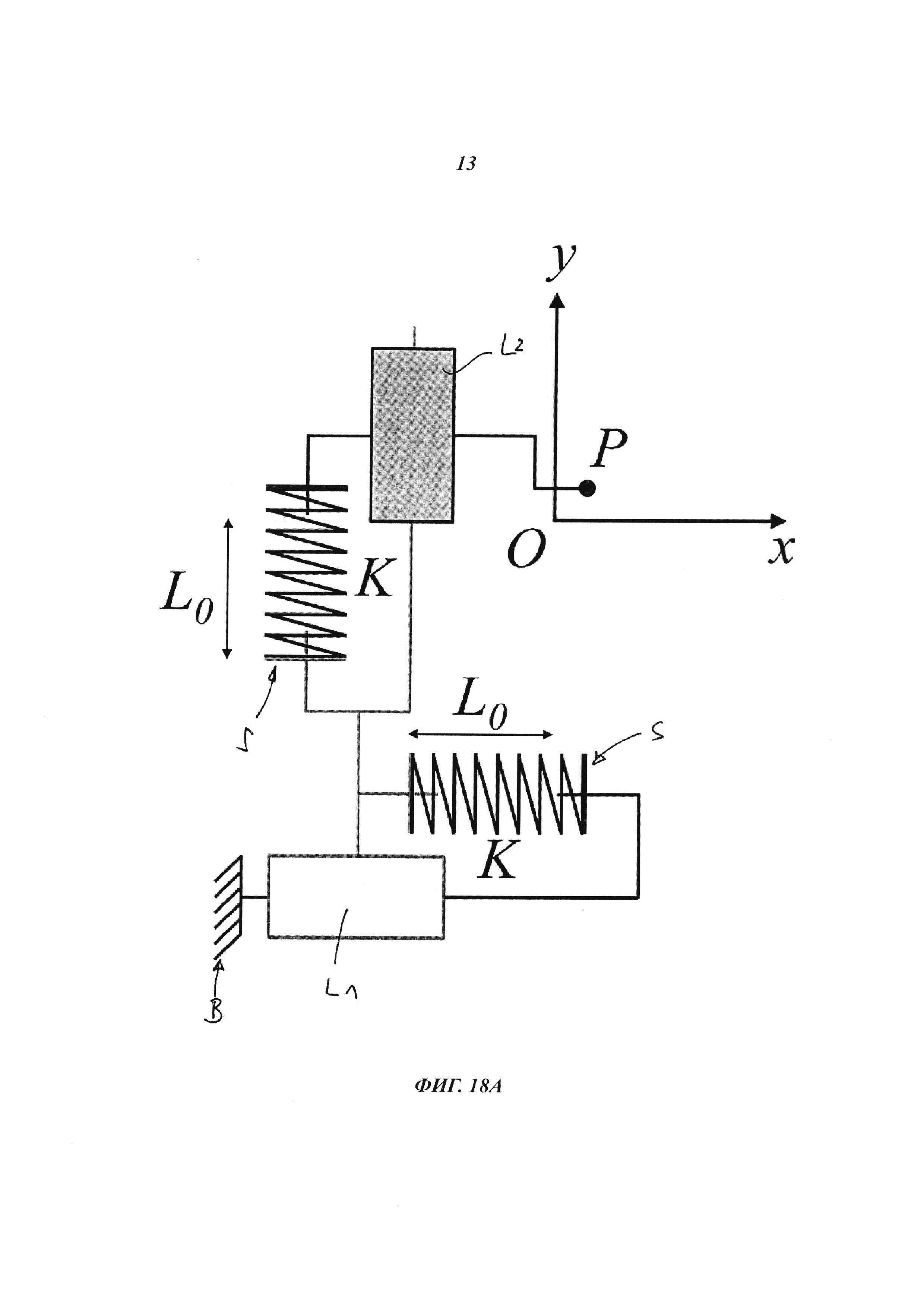
На фиг. 18А представлен базовый пример варианта осциллятора, изготовленного из планарной изотропной пружины согласно изобретению.
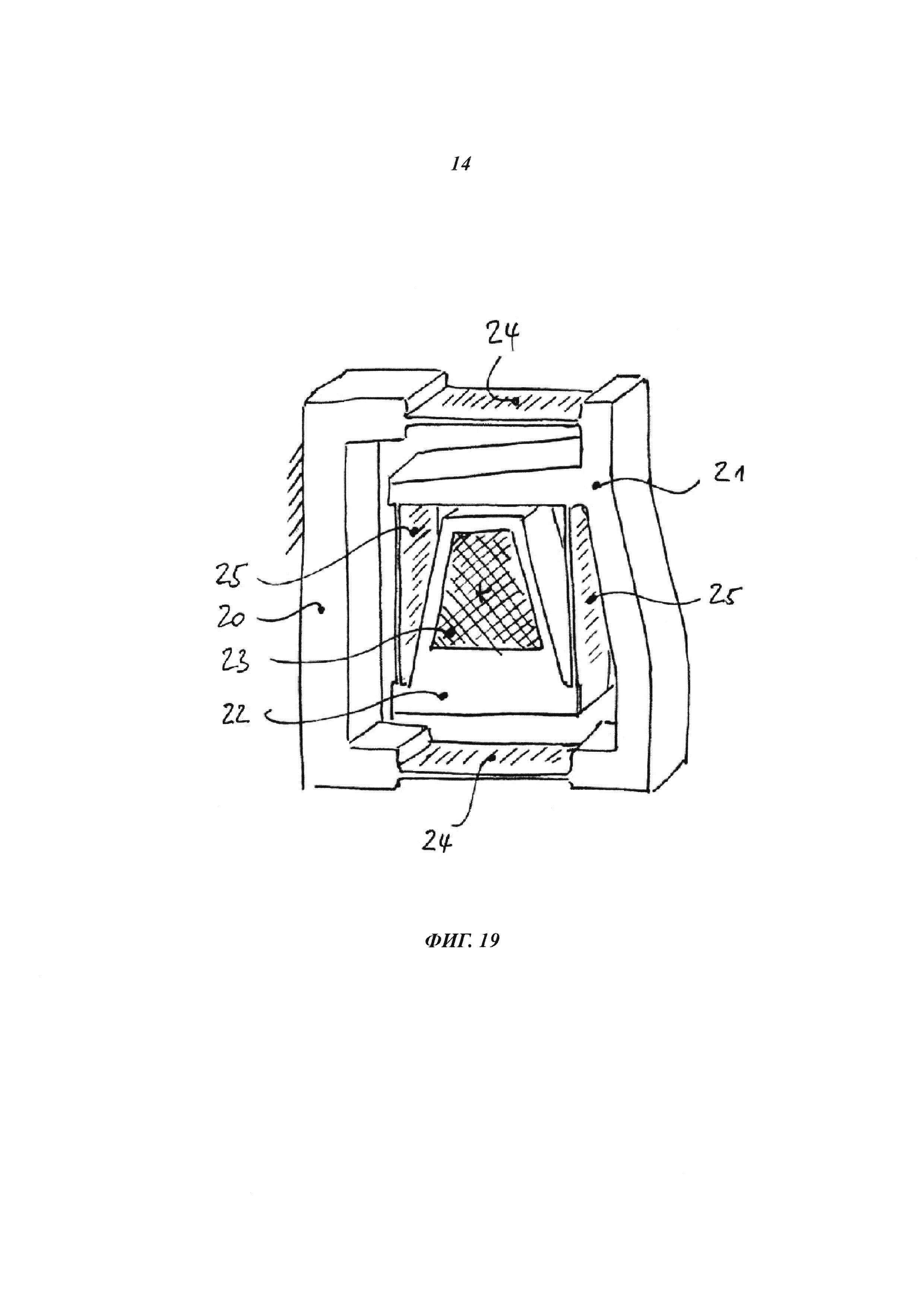
Фиг. 19 иллюстрирует планарную изотропную пружину с двумя степенями свободы.
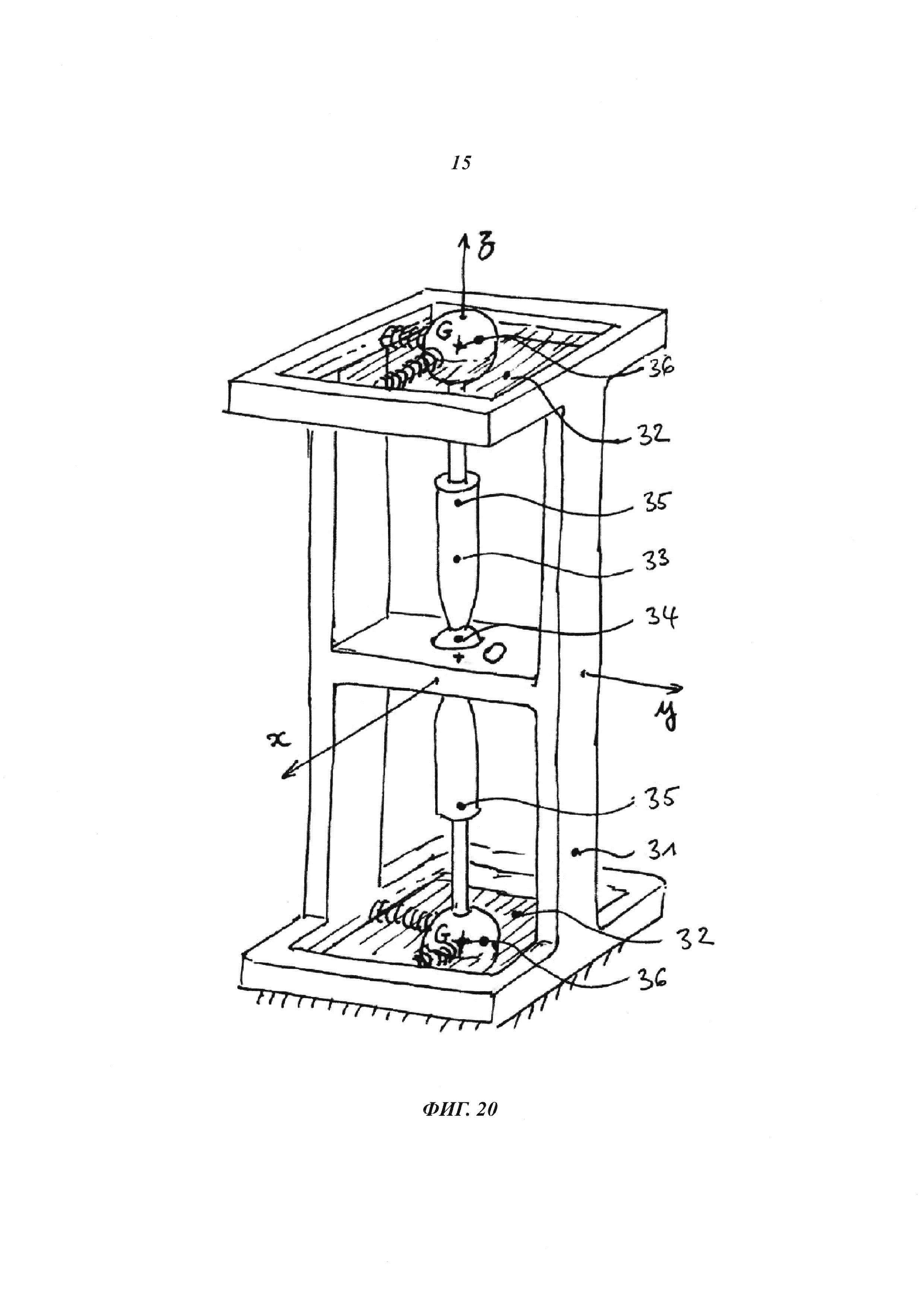
Фиг. 20 иллюстрирует компенсацию силы тяжести для планарной пружины, изотропной во всех направлениях.
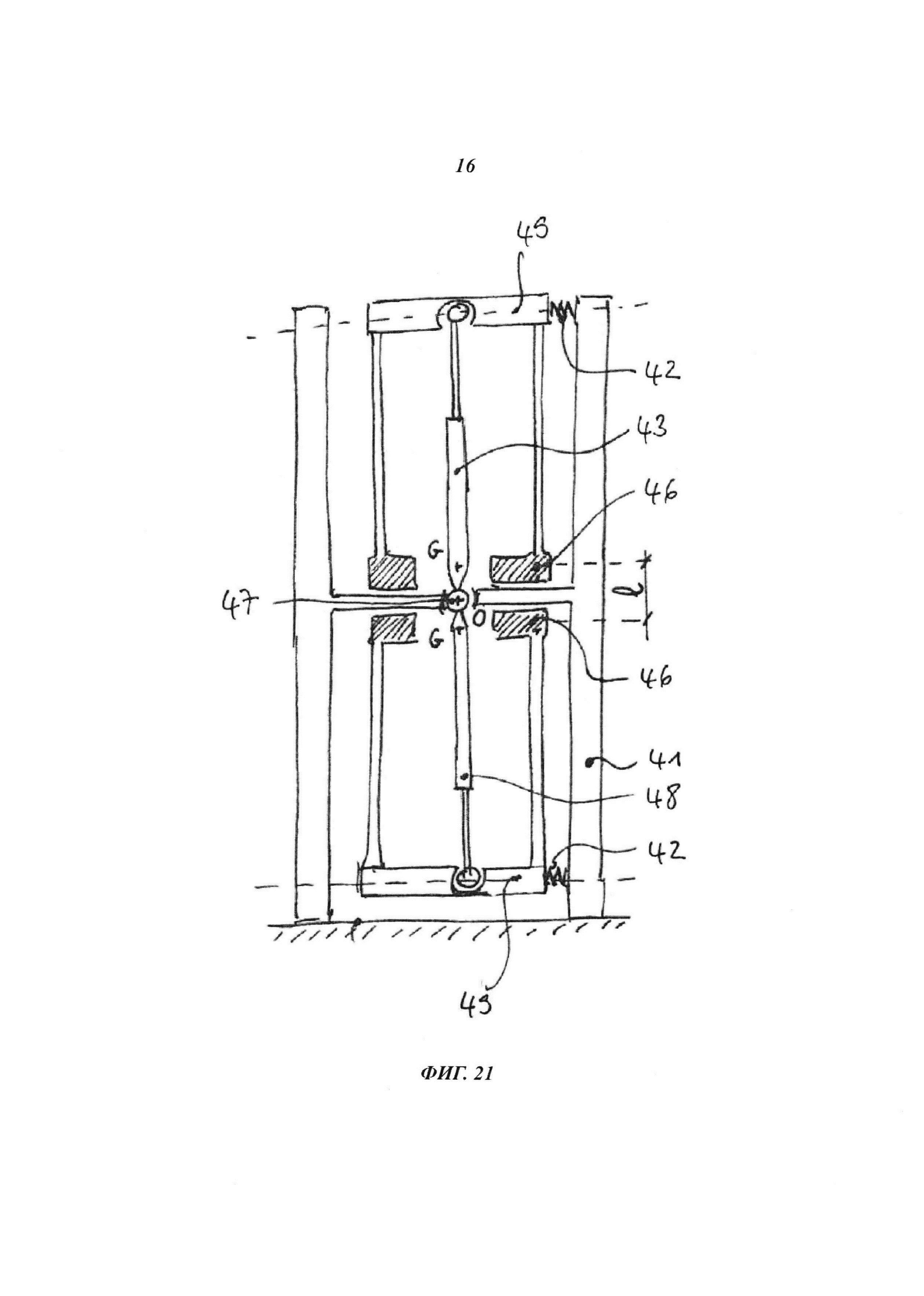
Фиг. 21 иллюстрирует компенсацию силы тяжести для планарной пружины, изотропной во всех направлениях, с добавленным сопротивлением угловому ускорению.
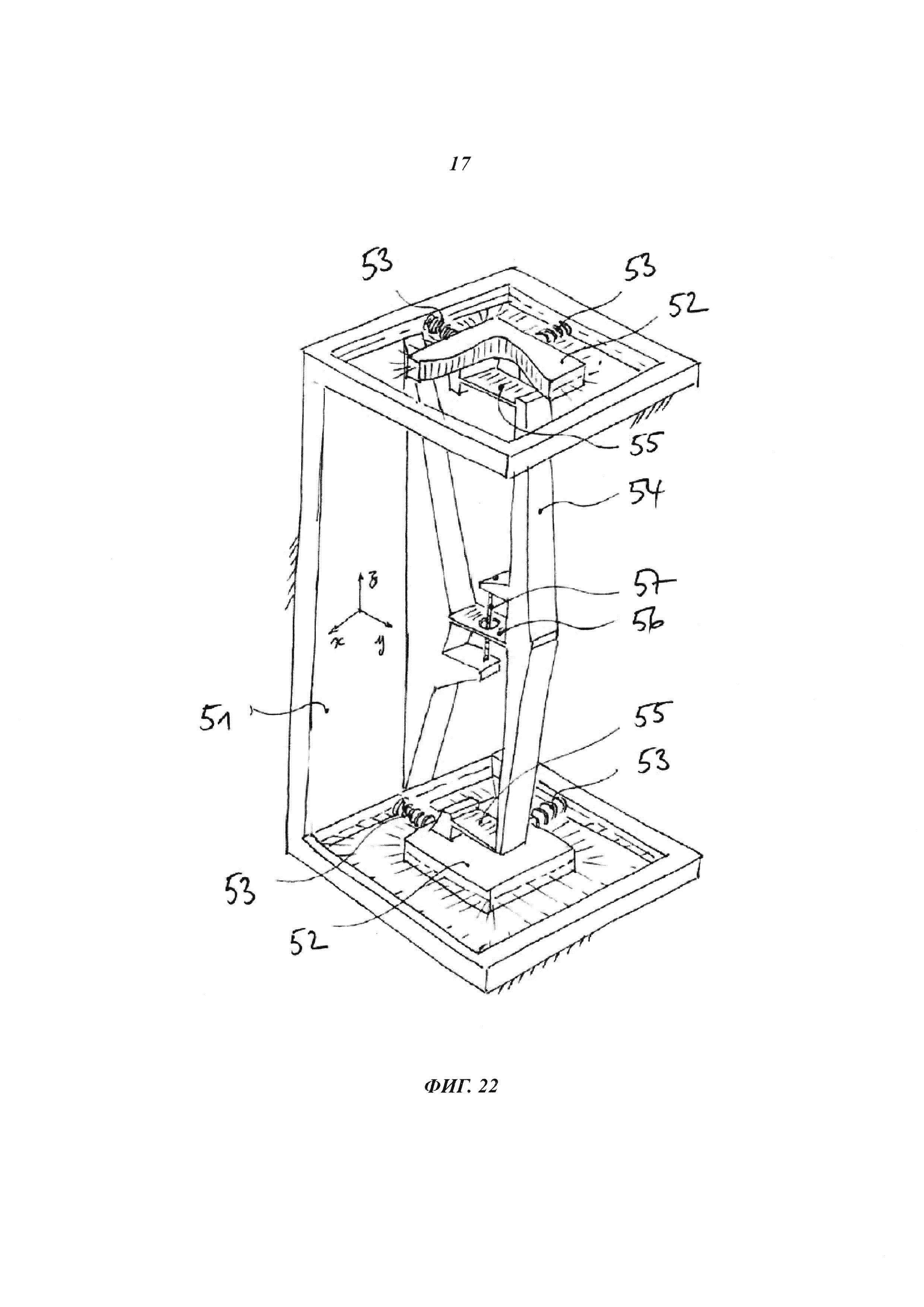
Фиг. 22 иллюстрирует реализацию компенсации, с использованием гибких элементов, силы тяжести для планарной пружины, изотропной во всех направлениях.
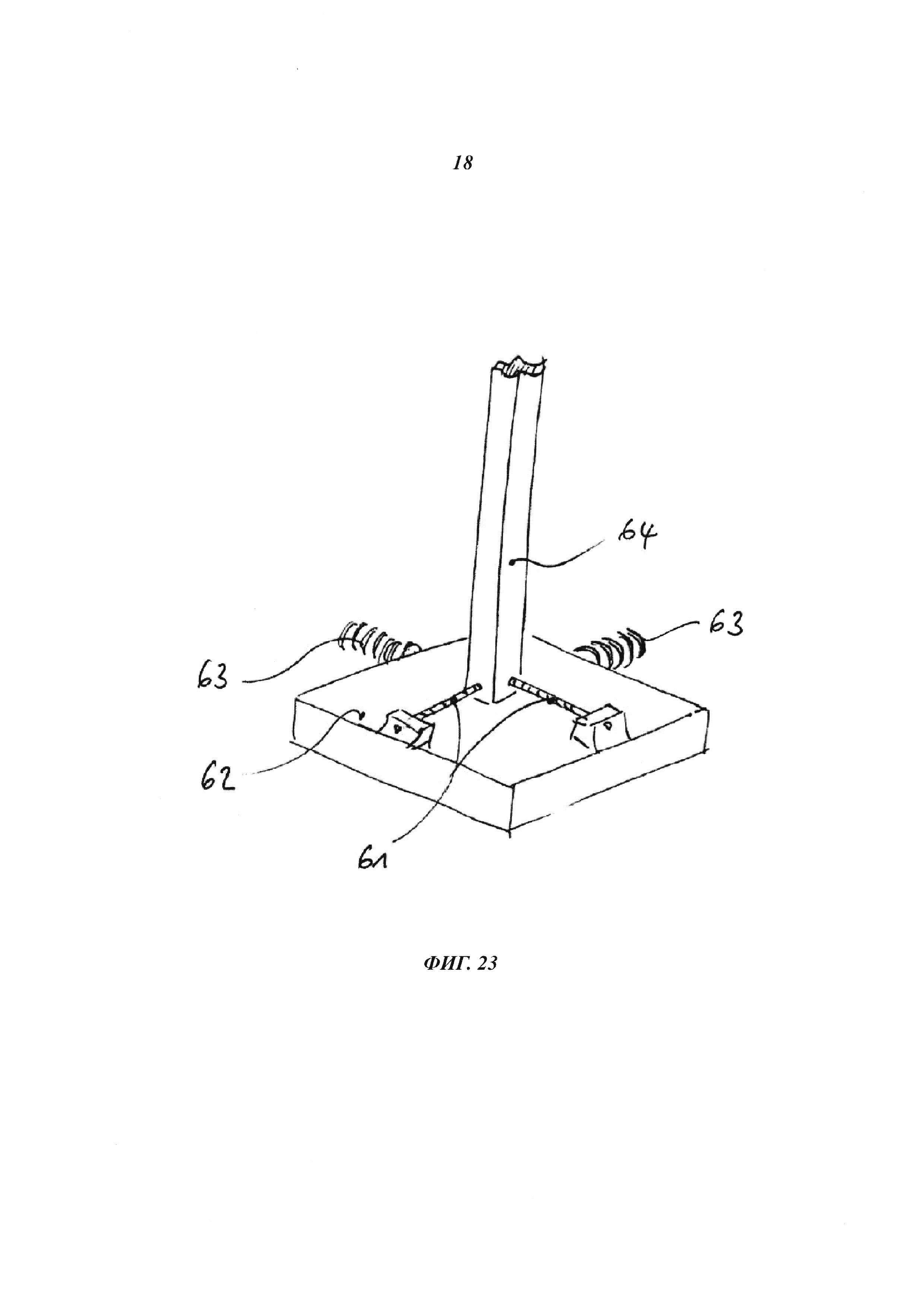
Фиг. 23 иллюстрирует альтернативную реализацию компенсации, с использованием гибких элементов, силы тяжести для планарной пружины, изотропной во всех направлениях.
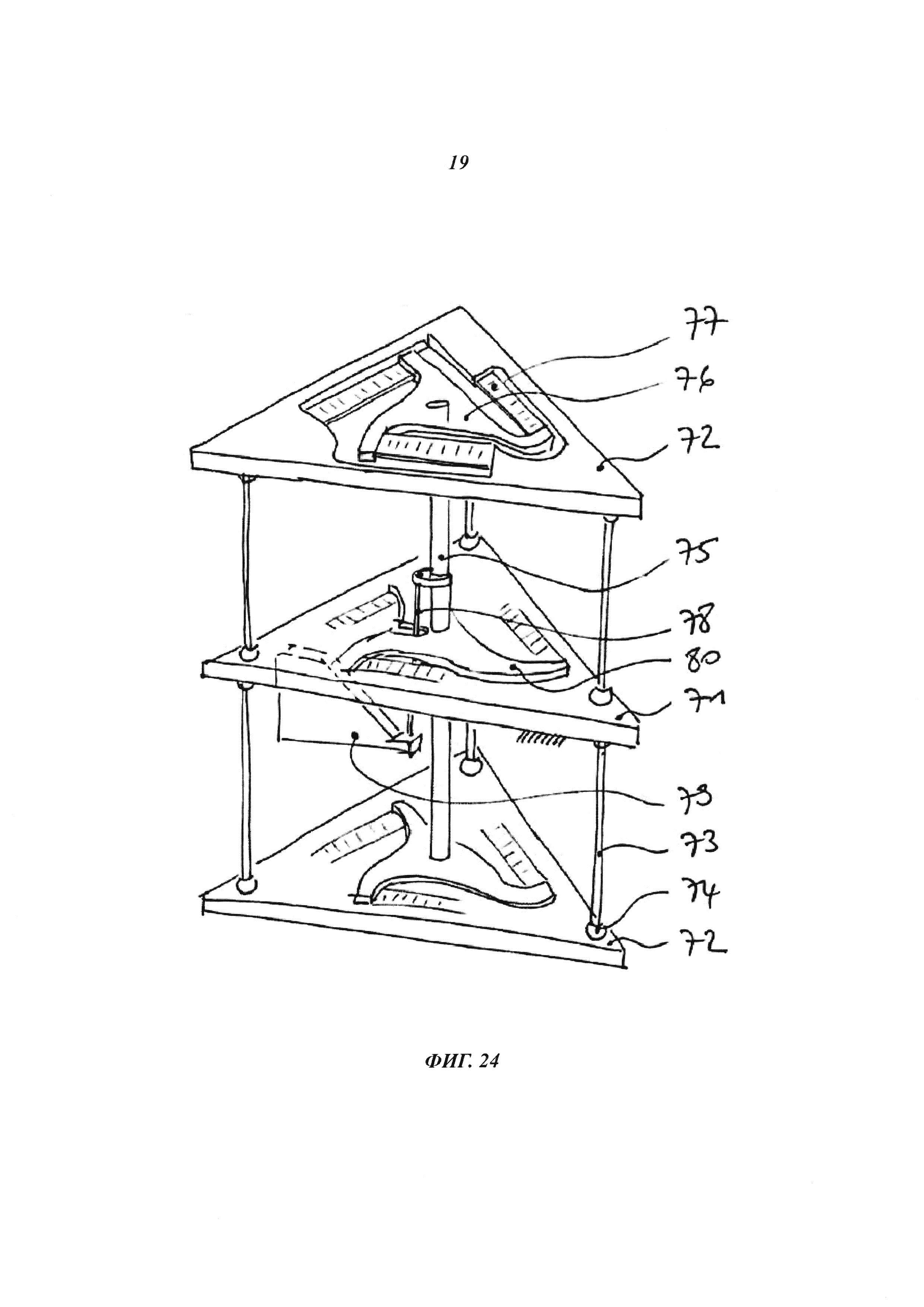
Фиг. 24 иллюстрирует вторую альтернативную реализацию компенсации, с использованием гибких элементов, силы тяжести для планарной пружины, изотропной во всех направлениях.
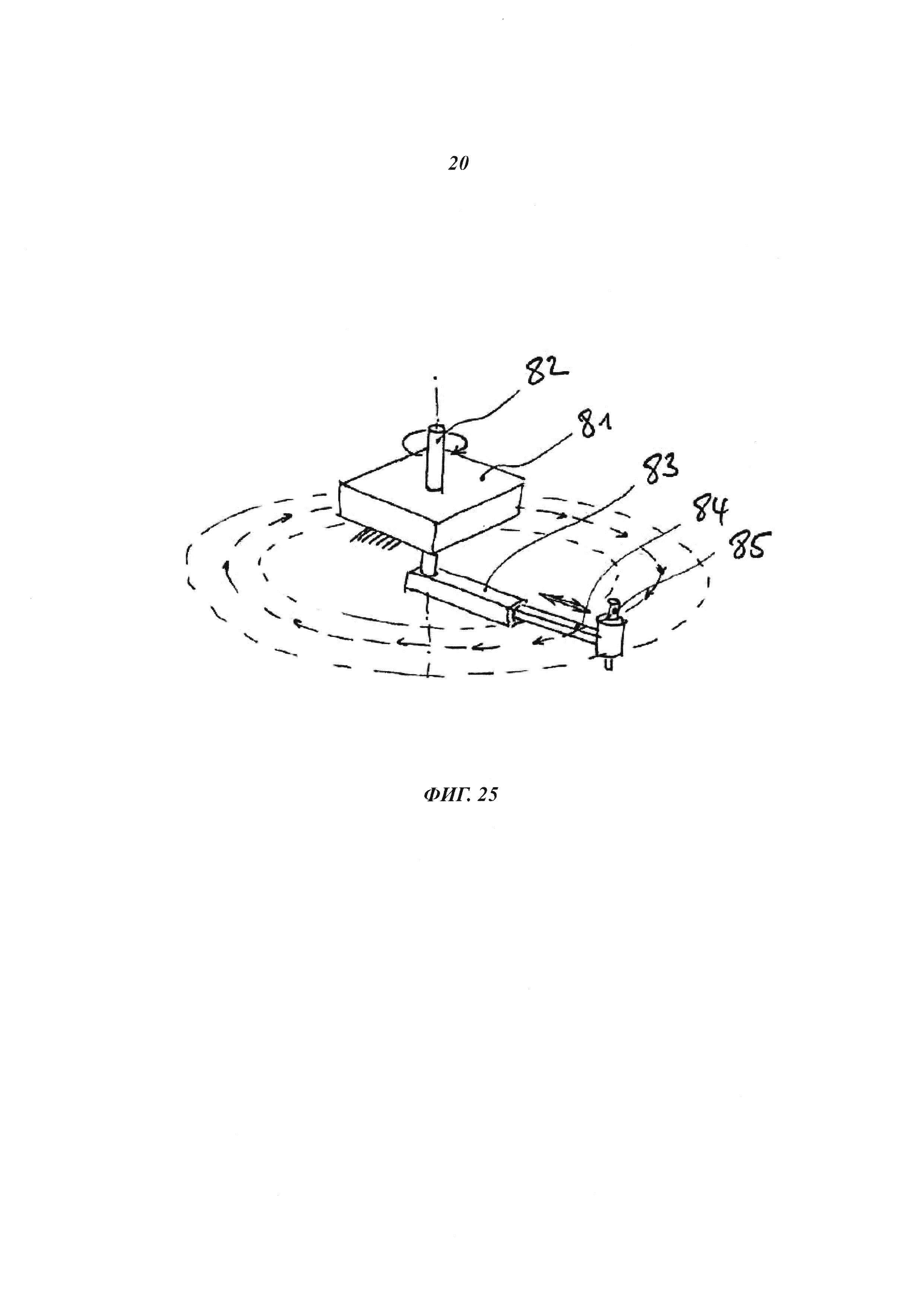
Фиг. 25 иллюстрирует компонент с переменным радиусом для поддержания энергии осциллятора.
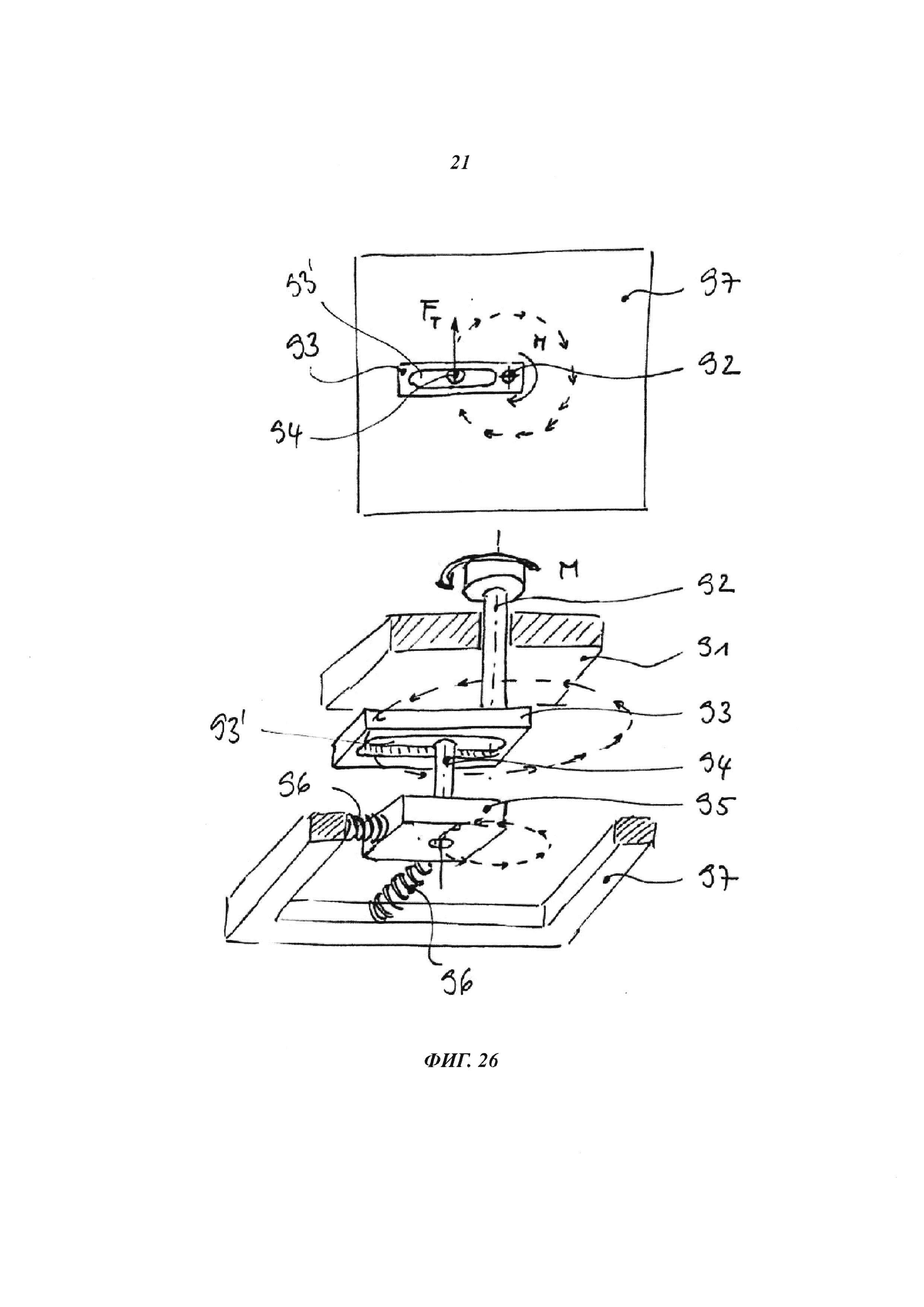
Фиг. 26 иллюстрирует реализацию прикрепленной к осциллятору кулисы с переменным радиусом для поддержания энергии осциллятора.
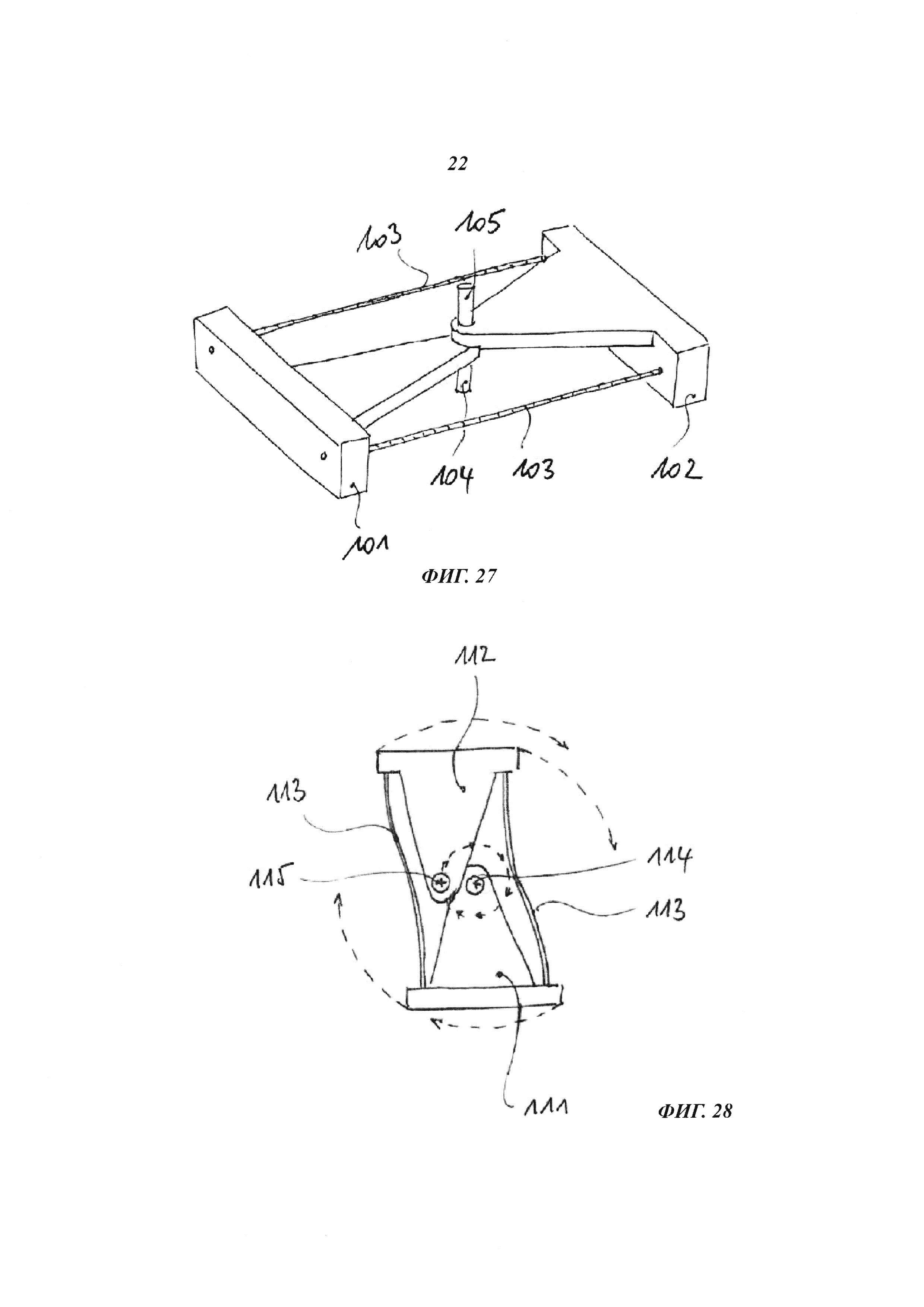
Фиг. 27 иллюстрирует реализацию компонента с переменным радиусом и с гибкими элементами для поддержания энергии осциллятора.
Фиг. 28 иллюстрирует другую реализацию компонента с переменным радиусом и с гибкими элементами для поддержания энергии осциллятора.
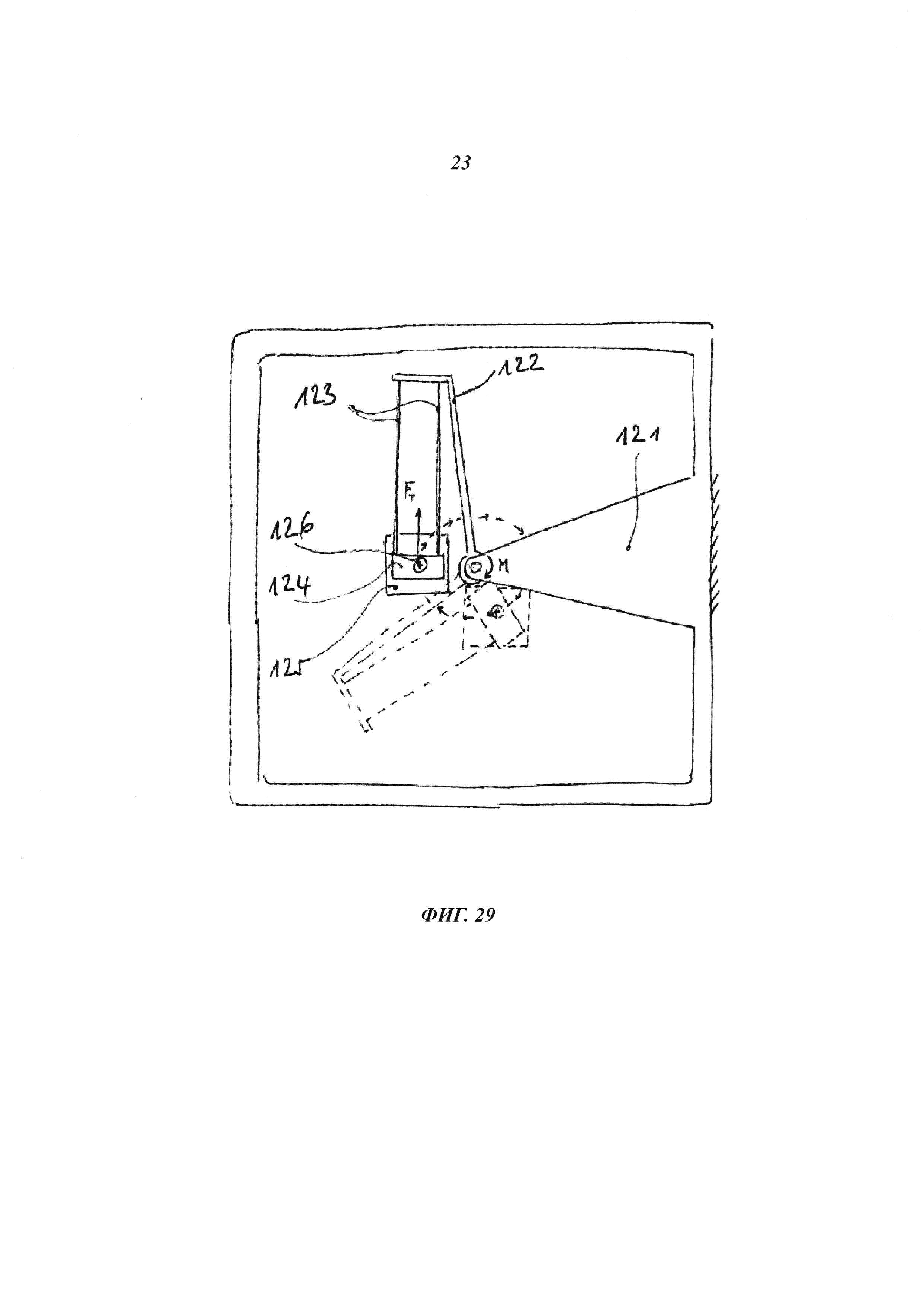
Фиг. 29 иллюстрирует альтернативную реализацию компонента с переменным радиусом и с гибкими элементами для поддержания энергии осциллятора.
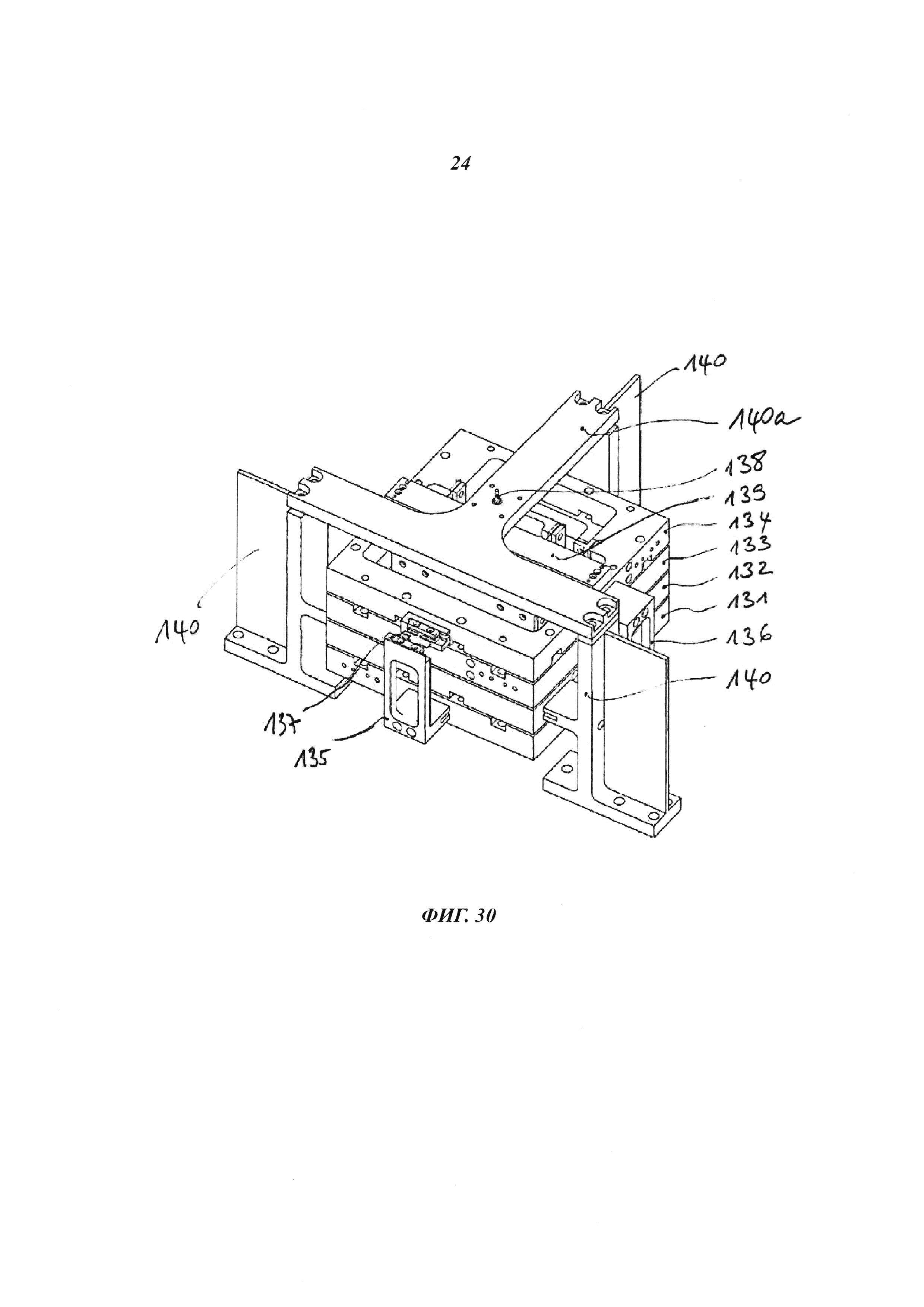
Фиг. 30 иллюстрирует пример полностью собранного изотропного осциллятора.
На фиг. 31 представлен частичный вид осциллятора по фиг. 30.
На фиг. 32 представлен частичный вид осциллятора по фиг. 31.
На фиг 33 представлен частичный вид осциллятора по фиг. 32.
На фиг 34 представлен частичный вид осциллятора по фиг. 33.
На фиг 35 представлен частичный вид осциллятора по фиг. 34.
Фиг. 36 иллюстрирует упрощенный классический свободный спуск для изотропного гармонического осциллятора в наручных часах.
Фиг. 37 иллюстрирует вариант свободного спуска для поступательной орбитальной массы.
Фиг. 38 иллюстрирует другой вариант свободного спуска для поступательной орбитальной массы.
Фиг. 39 иллюстрирует пример согласованных XY-блоков.
Фиг. 40 иллюстрирует вариант согласованного шарнира.
Фиг. 41 иллюстрирует вариант изотропной пружины с двумя степенями свободы, имеющей два согласованных шарнира.
Фиг. 42 иллюстрирует вариант, минимизирующий дефект изотропии приведенной массы.
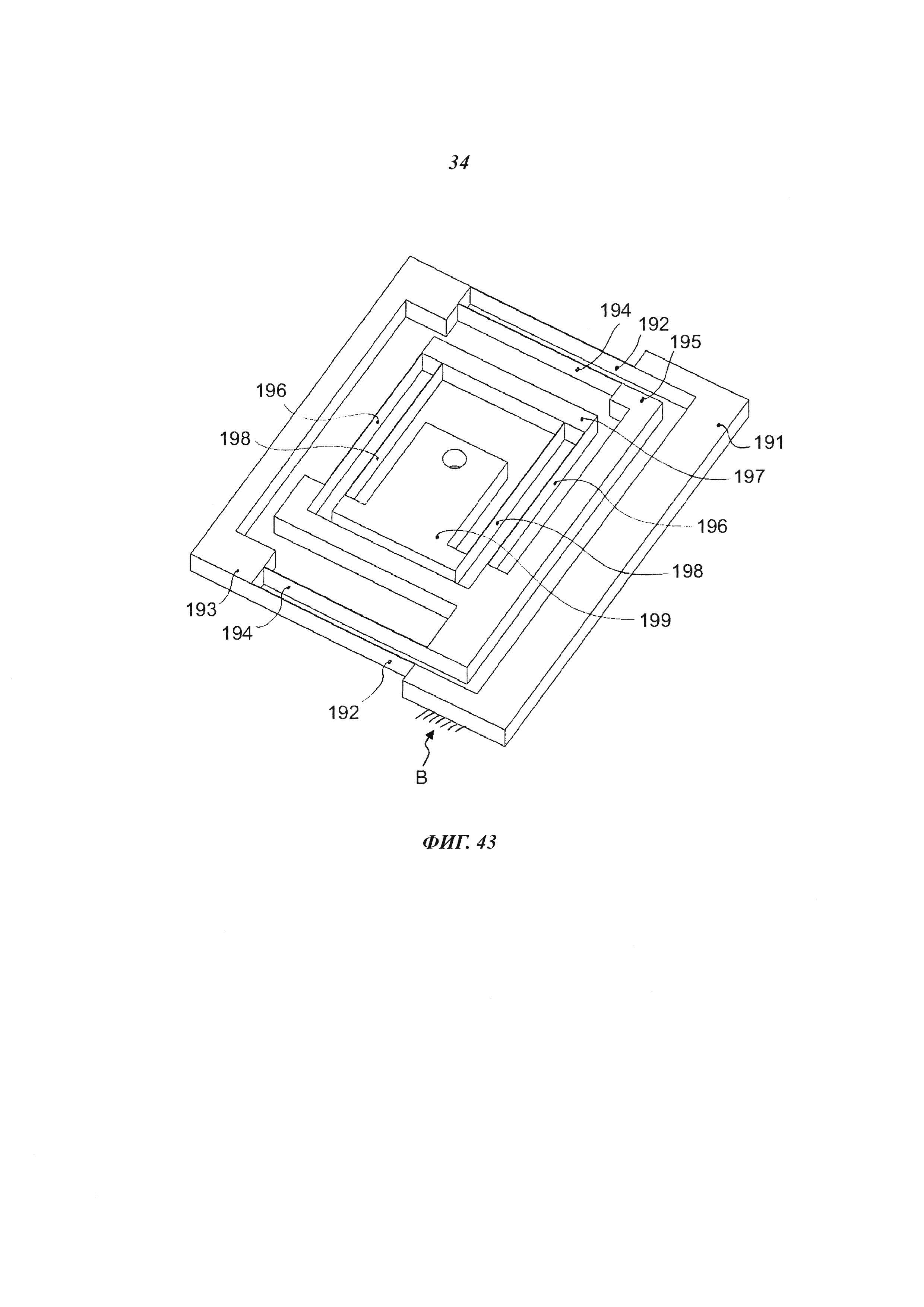
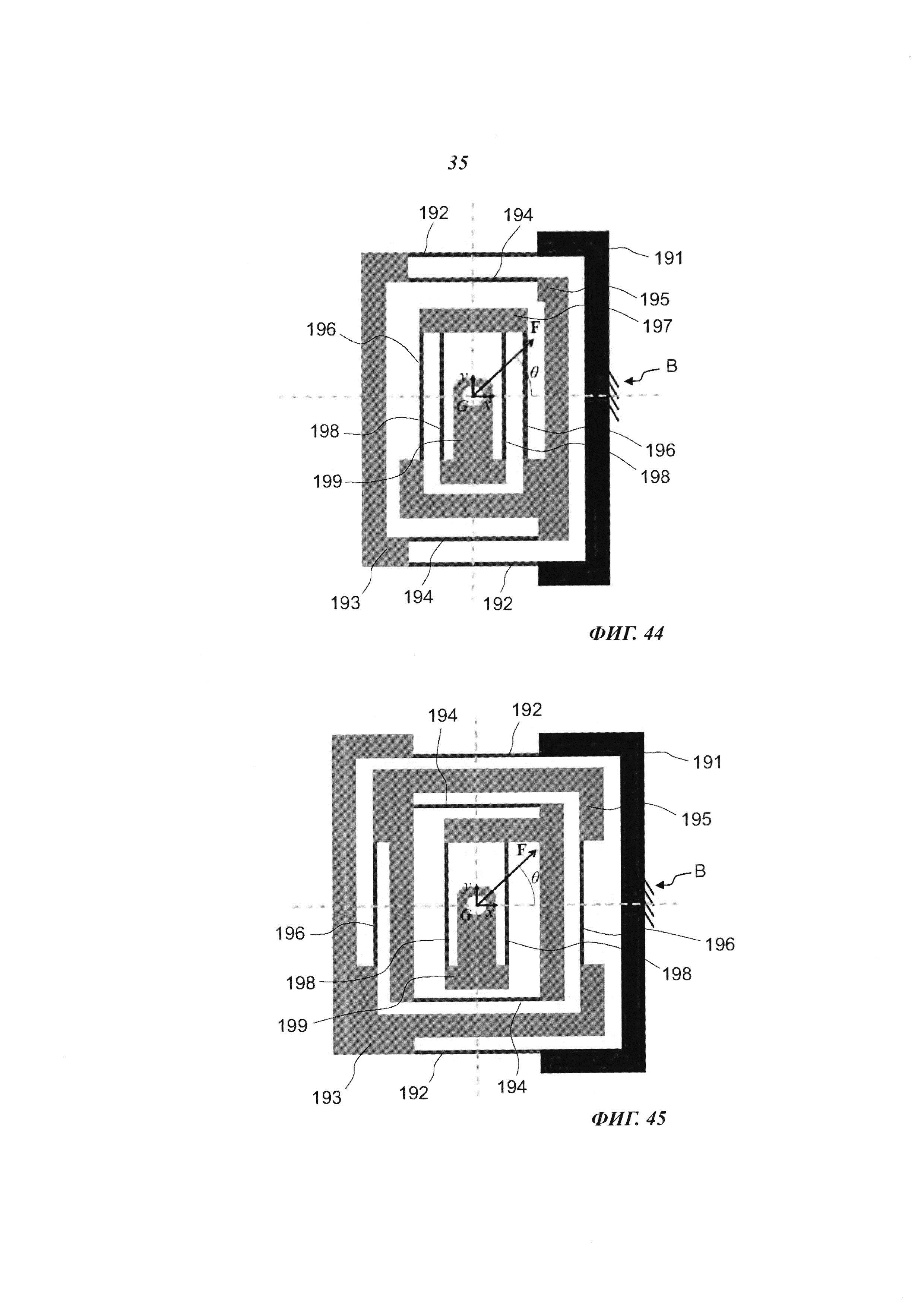
Фиг. 43, 44 и 45 иллюстрируют варианты находящихся в одной плоскости ортогональных компенсированных параллельных пружинных блоков.
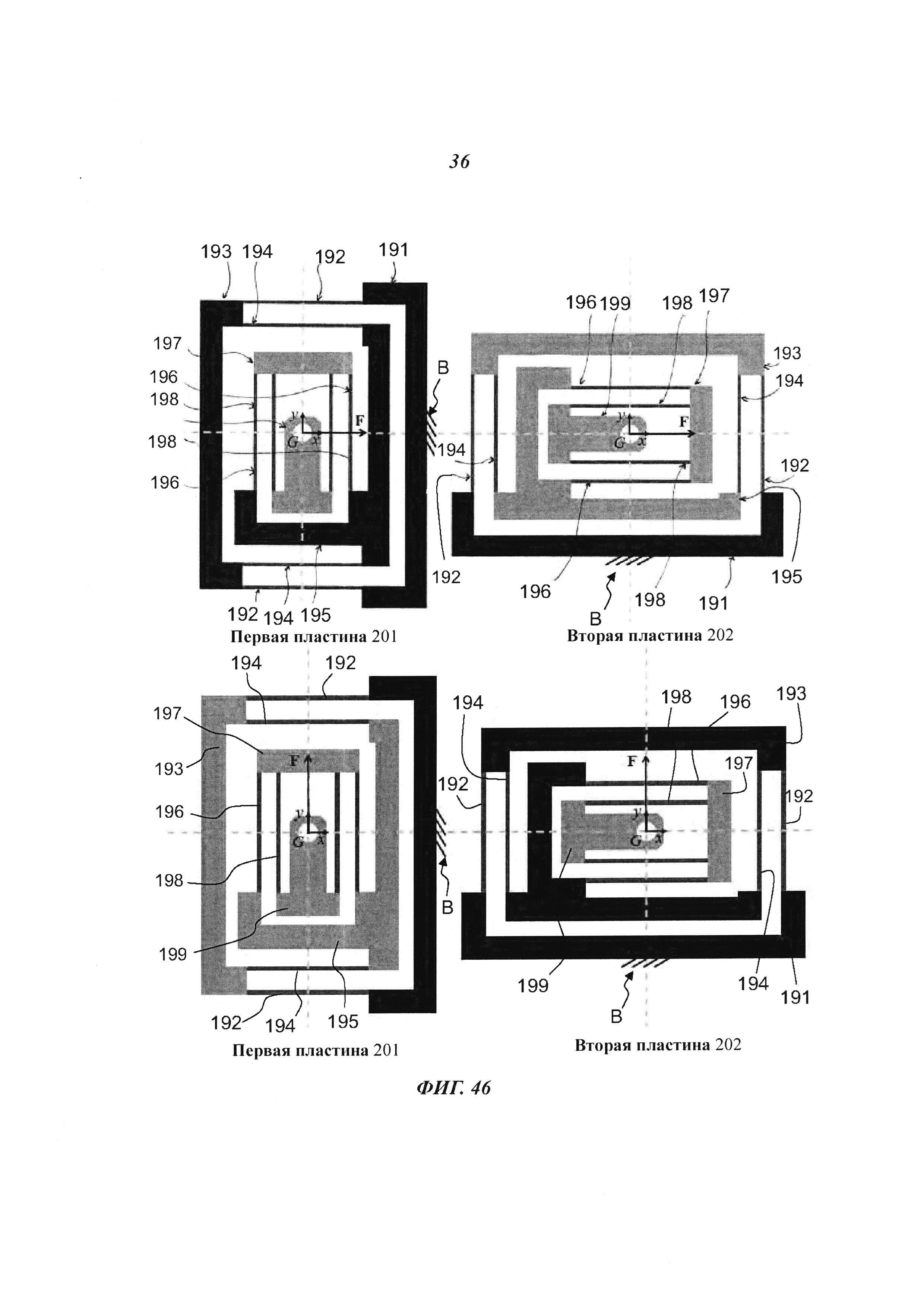
Фиг. 46 иллюстрирует вариант, минимизирующий дефект изотропии приведенной массы.
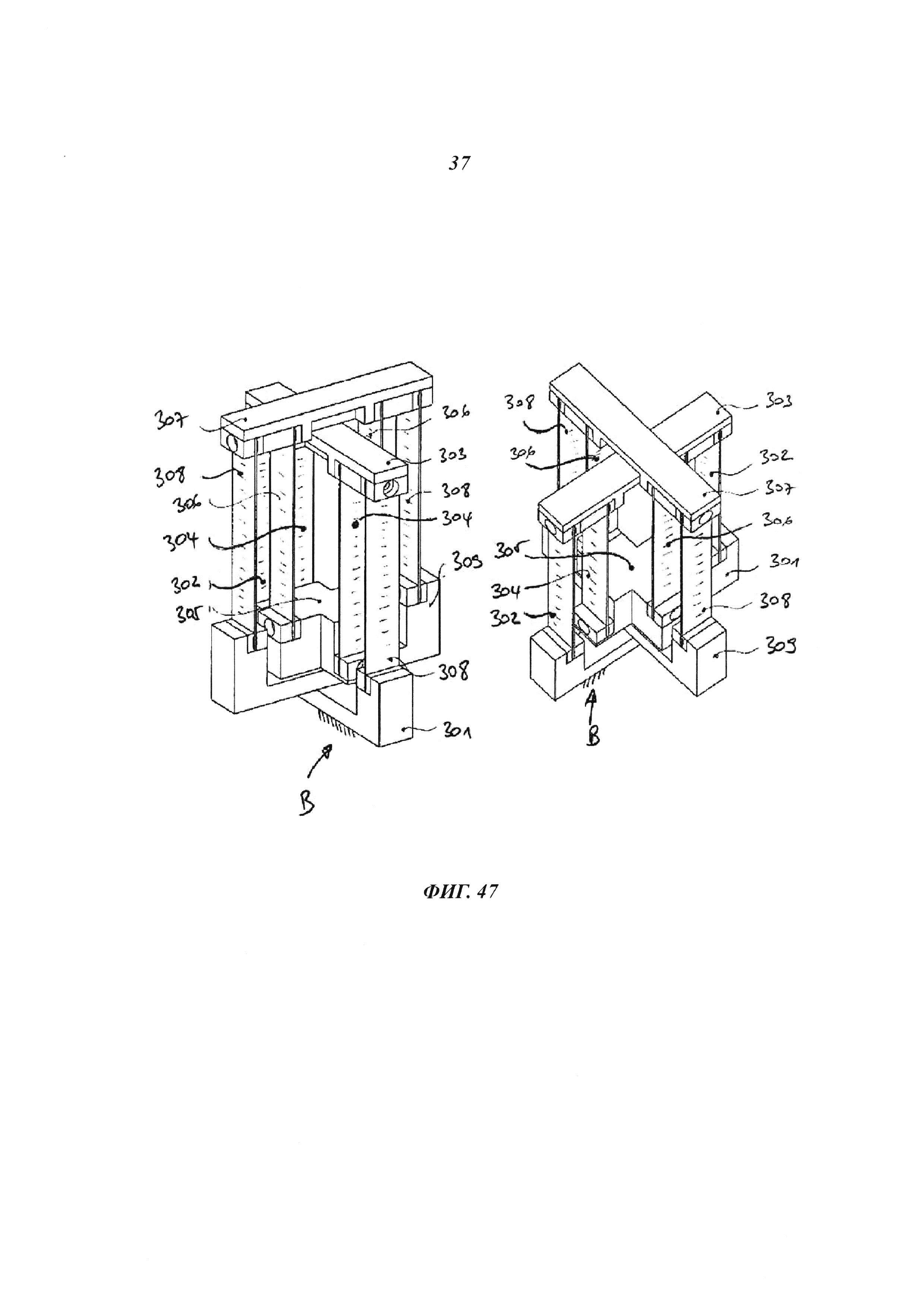
Фиг. 47 иллюстрирует вариант выходящей из плоскости ортогональной компенсированной изотропной пружины согласно изобретению.
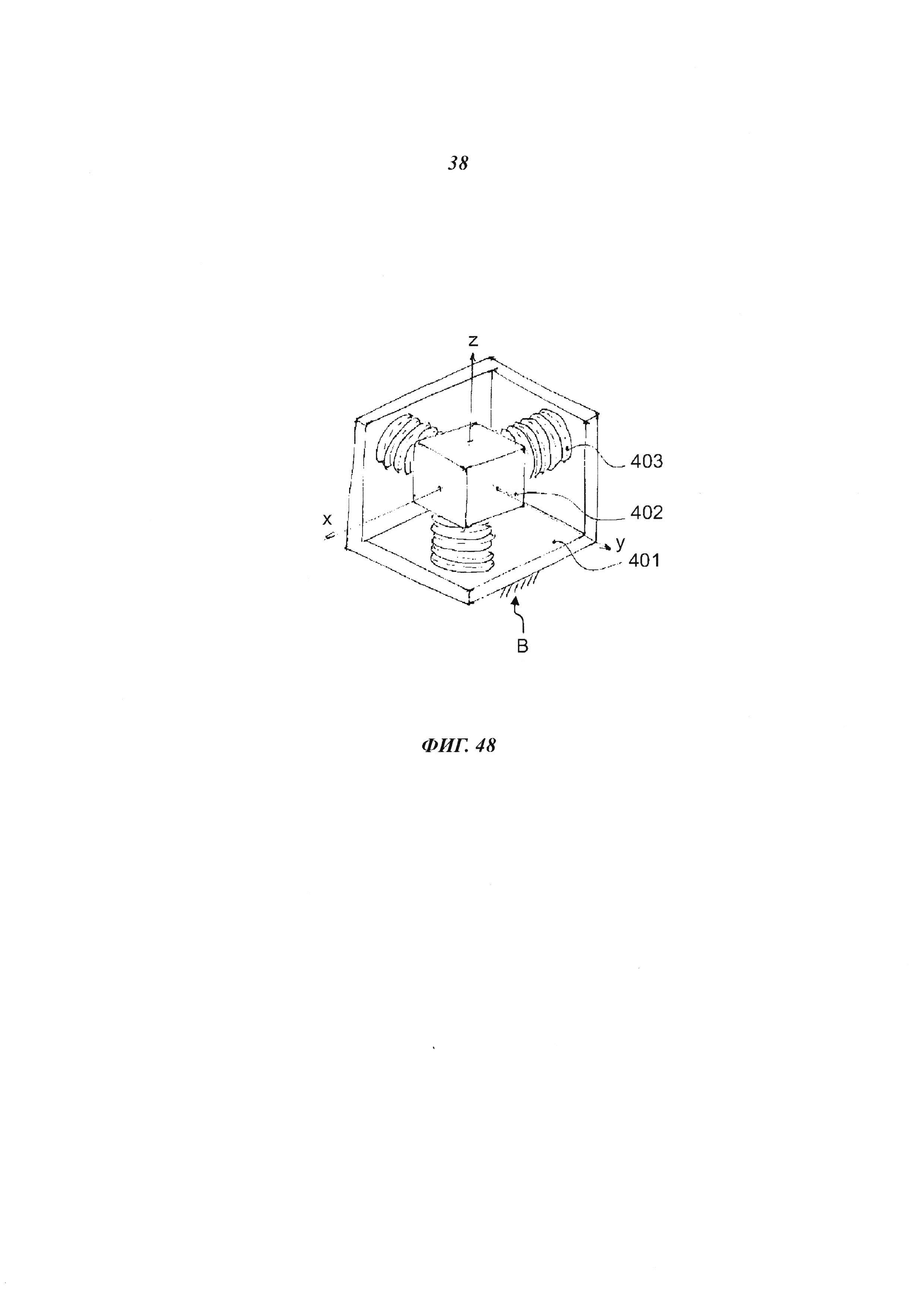
Фиг. 48 иллюстрирует вариант трехмерной изотропной пружины.
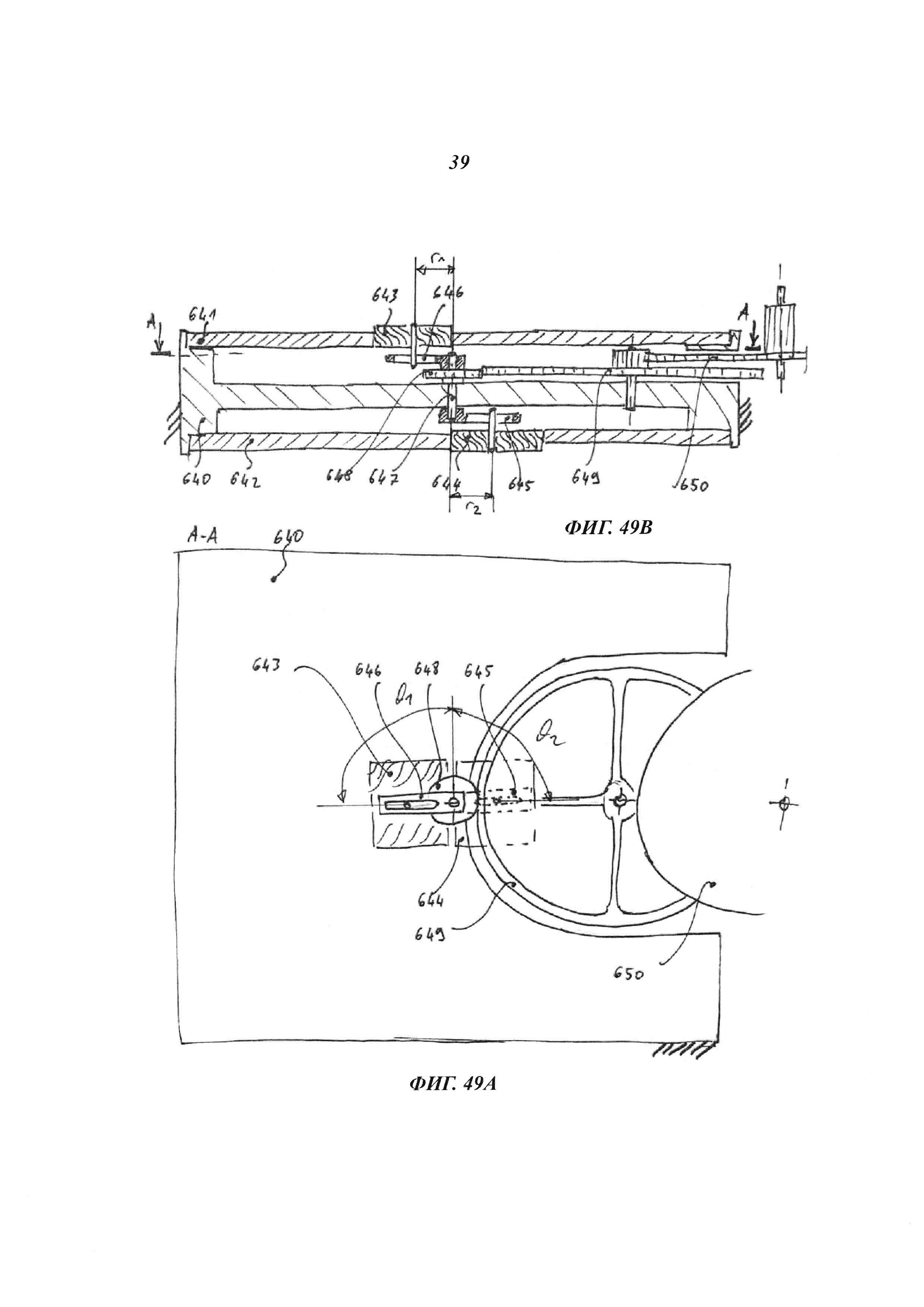
Фиг. 49А и 49В иллюстрируют вариант динамически сбалансированных изотропных пружин с различными орбитальными положениями.
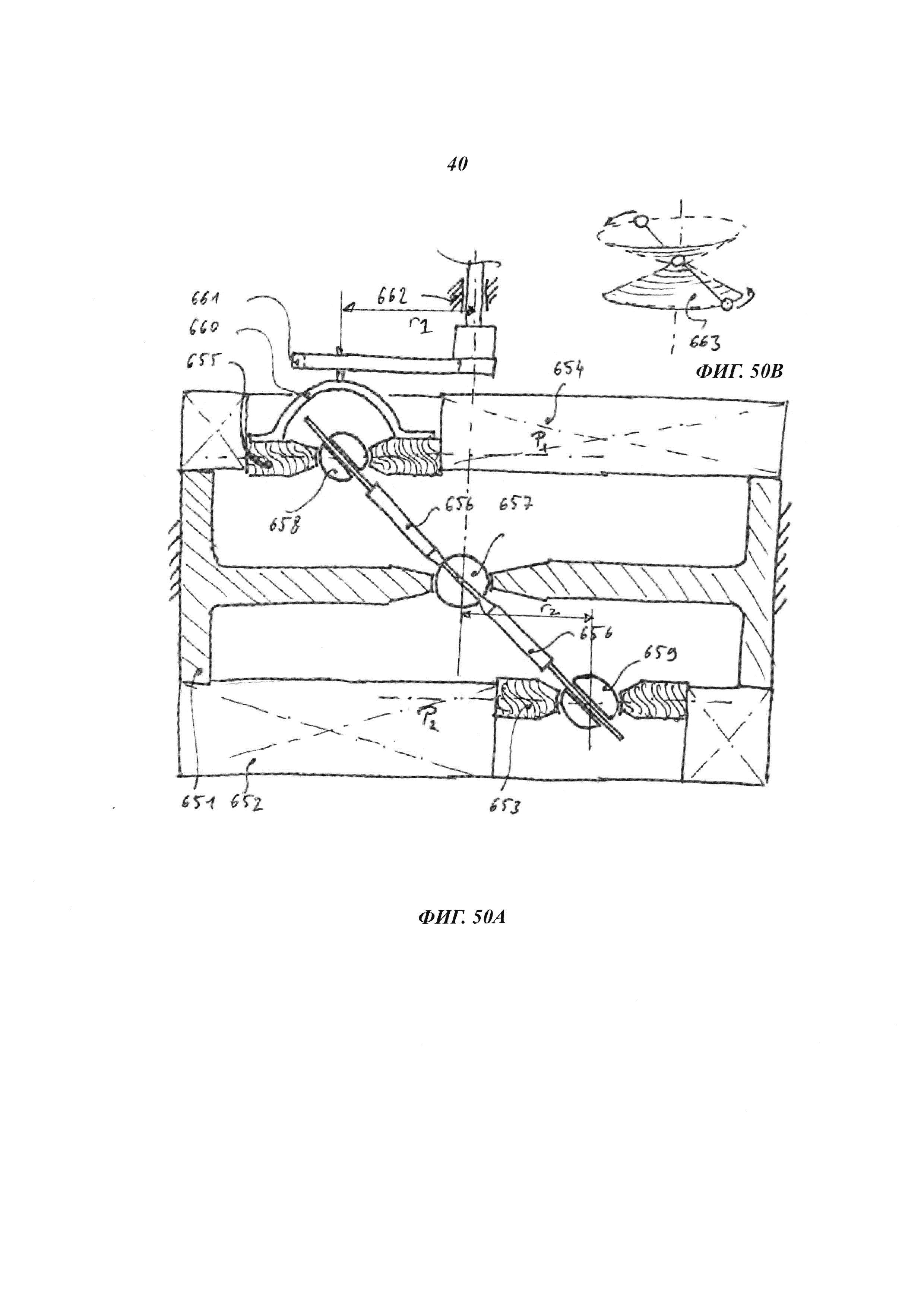
Фиг. 50А и 50В иллюстрируют вариант динамически сбалансированных изотропных пружин с идентичными орбитальными положениями.
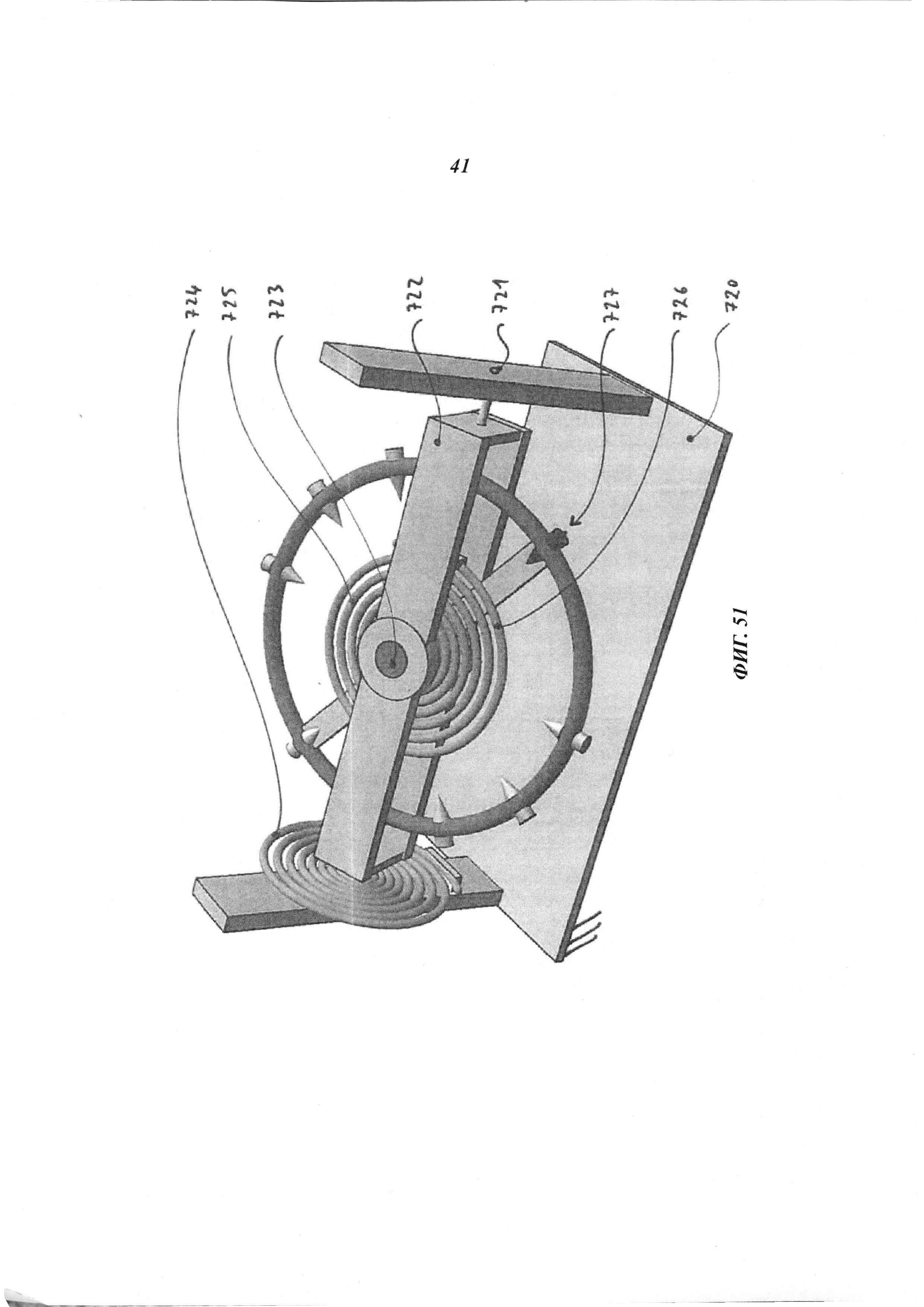
Фиг. 51 иллюстрирует вариант изотропного гармонического XY-осциллятора с обобщенными координатами X и Y вращения.
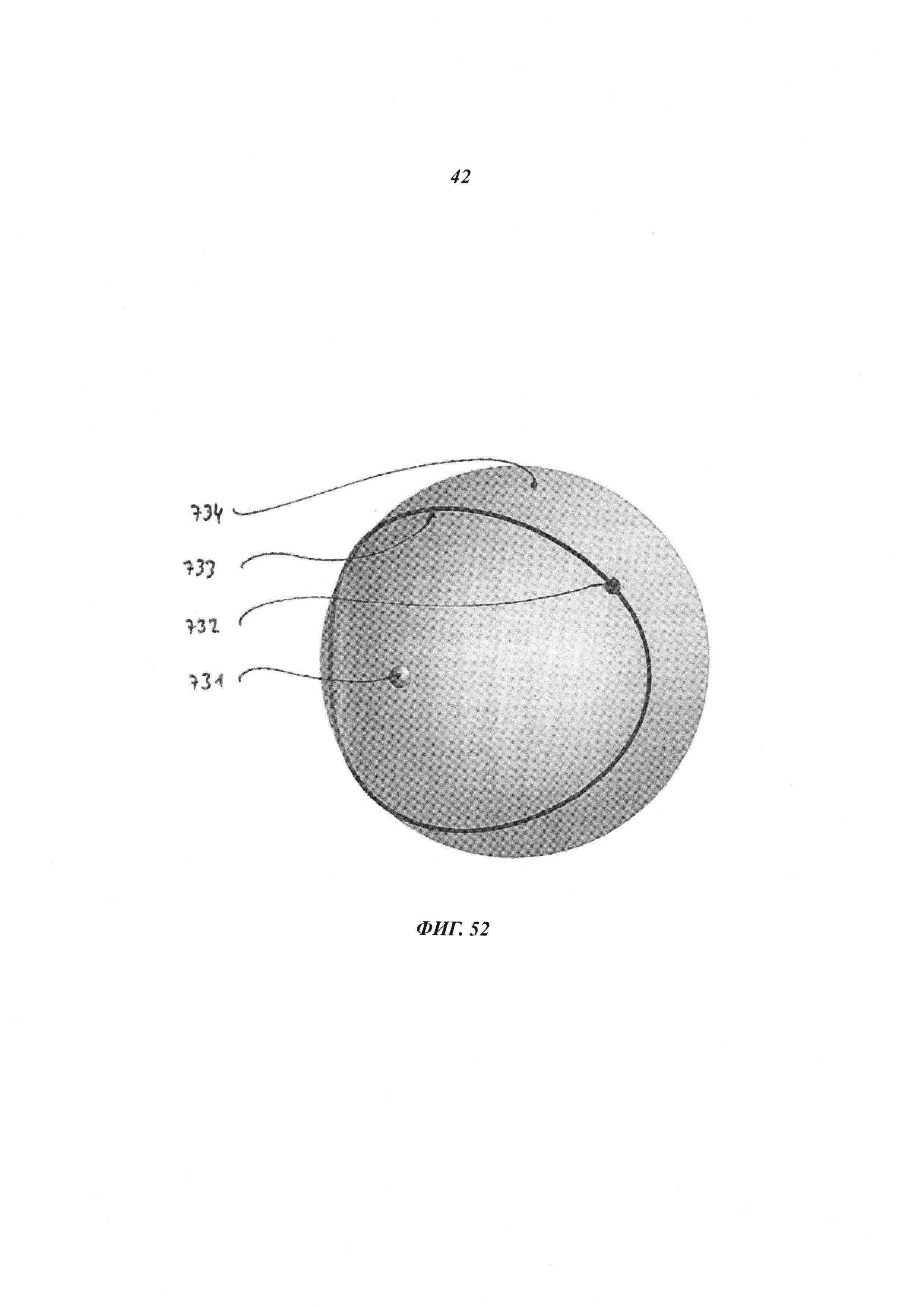
Фиг. 52 иллюстрирует сферическую траекторию пальца для передачи импульса изотропному гармоническому XY-осциллятору с обобщенными координатами X и Y вращения.
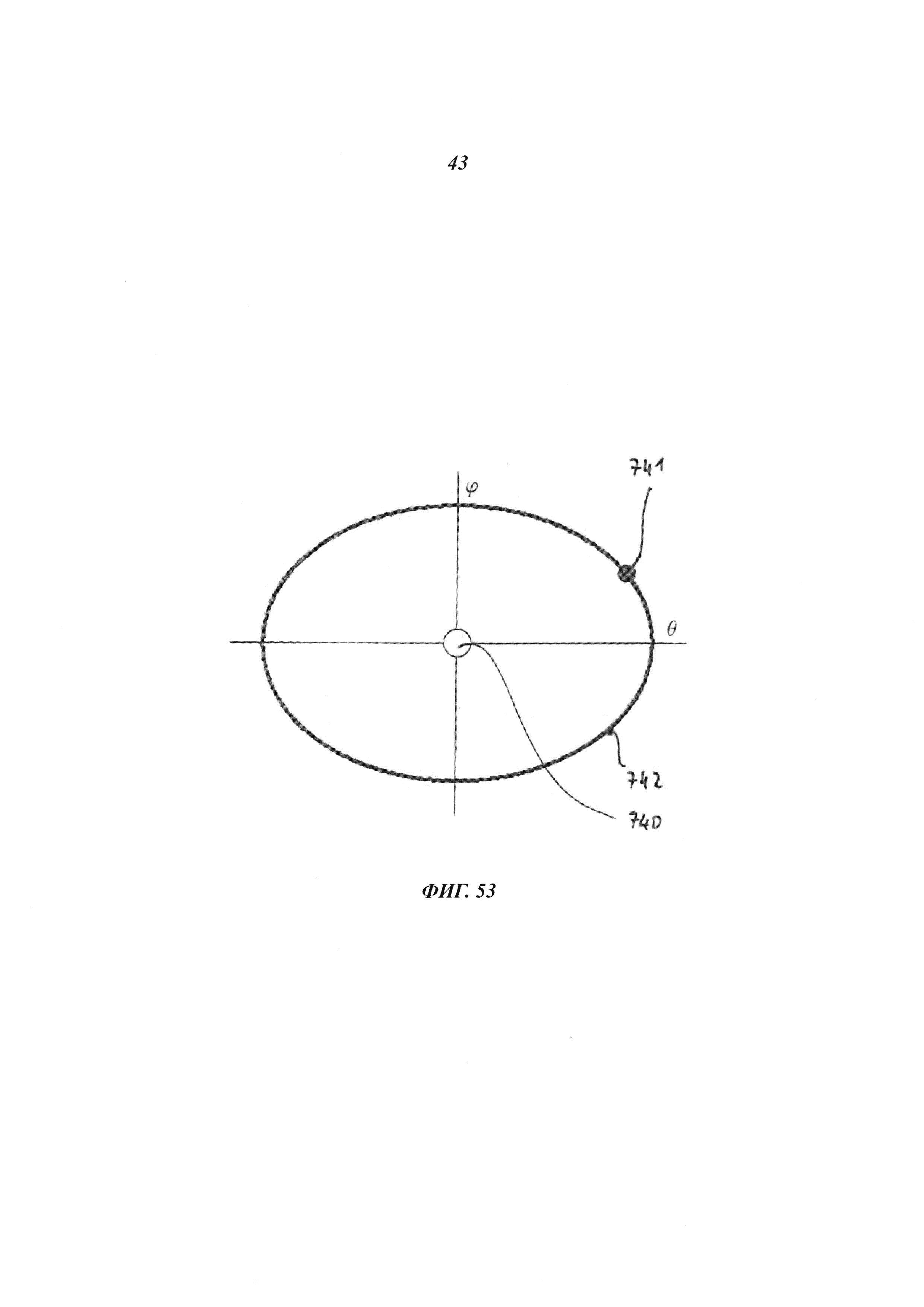
Фиг. 53 иллюстрирует эллиптическую траекторию пальца для передачи импульса изотропному гармоническому XY-осциллятору с обобщенными координатами X и Y вращения.
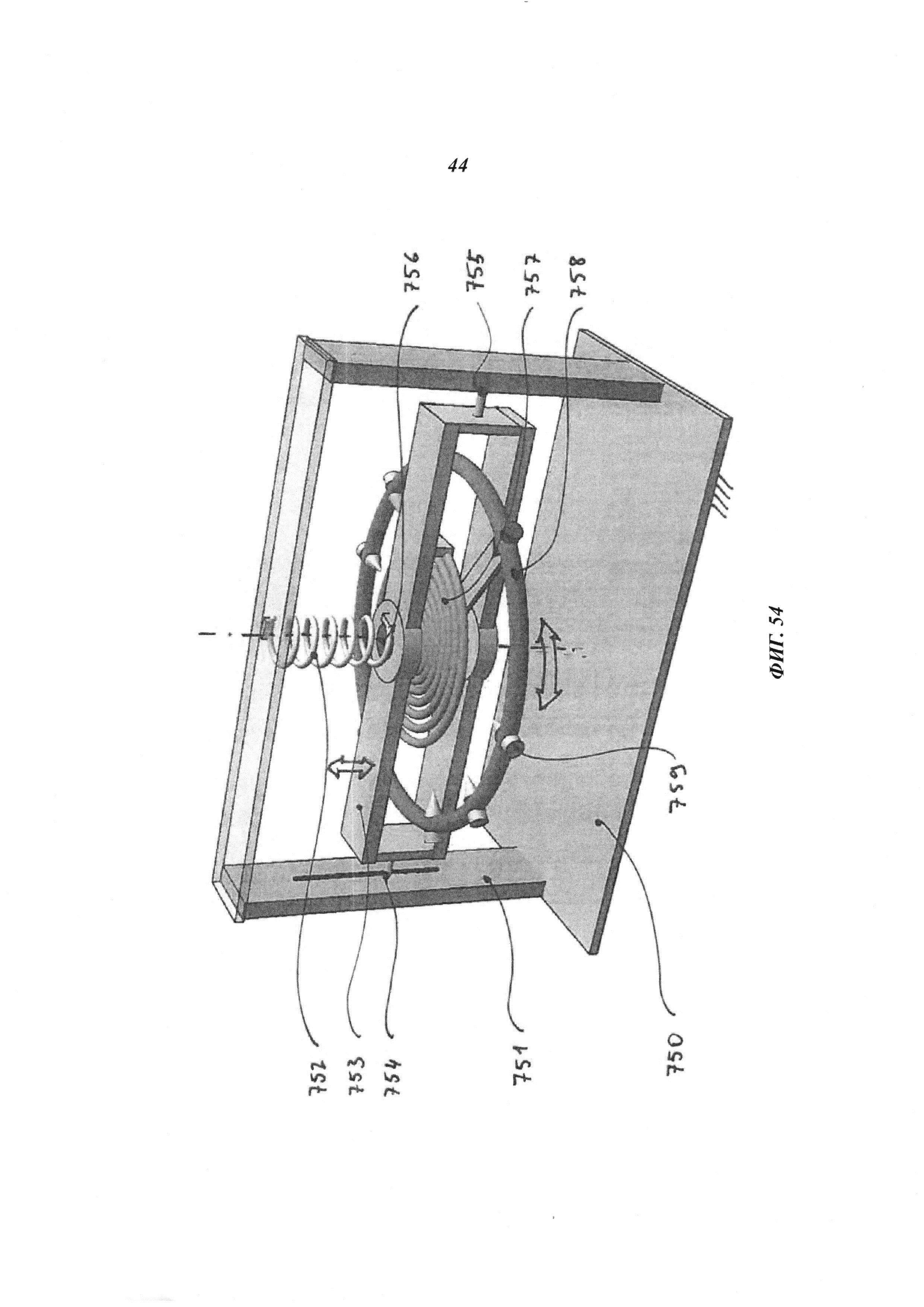
Фиг. 54 иллюстрирует вариант изотропного гармонического XY-осциллятора с обобщенными координатами поступательного перемещения X и вращения Y.
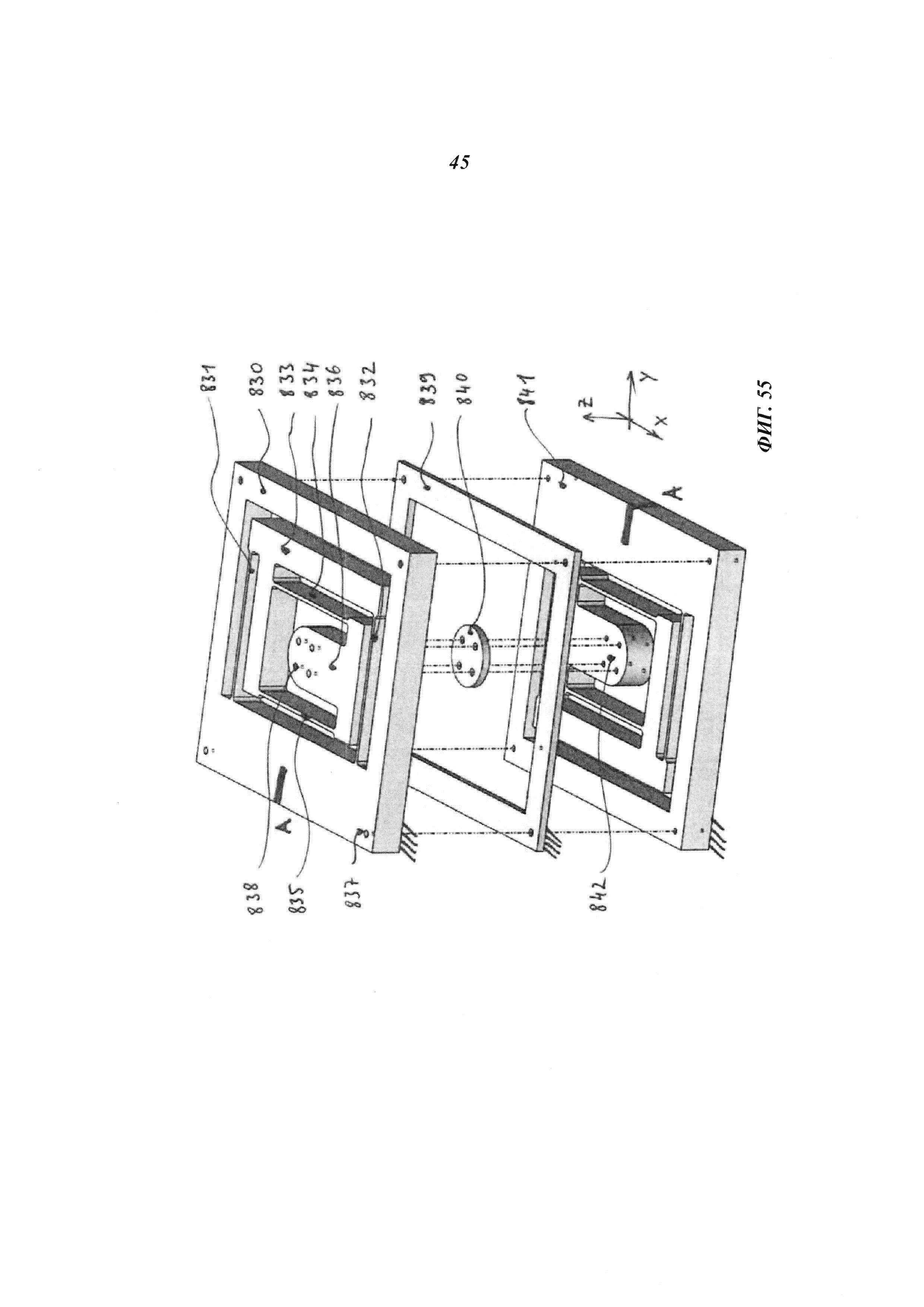
Фиг. 55 иллюстрирует сборку из двух параллельных идентичных осцилляторов с параллельными XY-пружинами, направленную на улучшение изотропии жесткости.
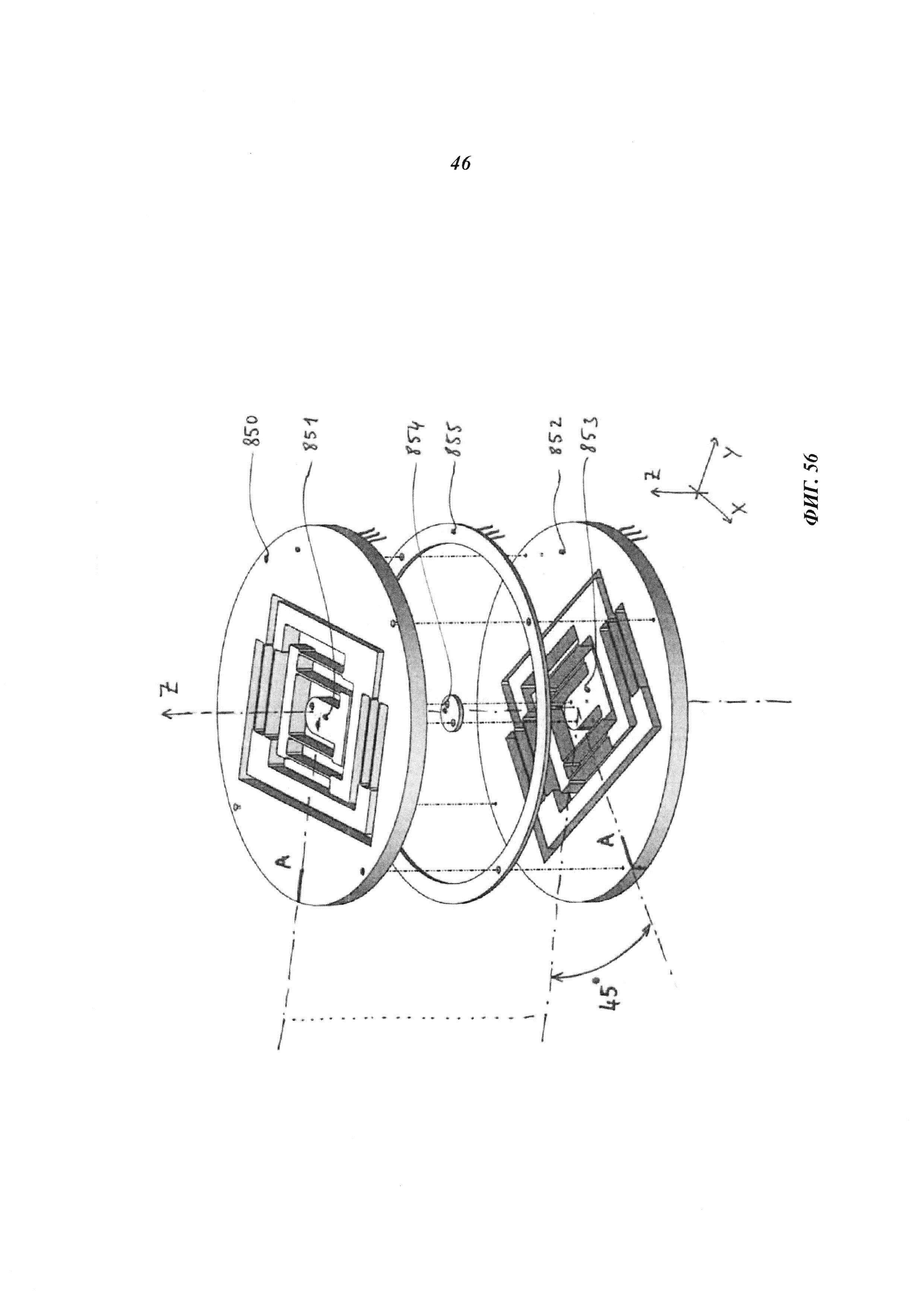
Фиг. 56 иллюстрирует сборку из двух параллельных идентичных осцилляторов с составными параллельными XY-пружинами, направленную на улучшение изотропии жесткости.
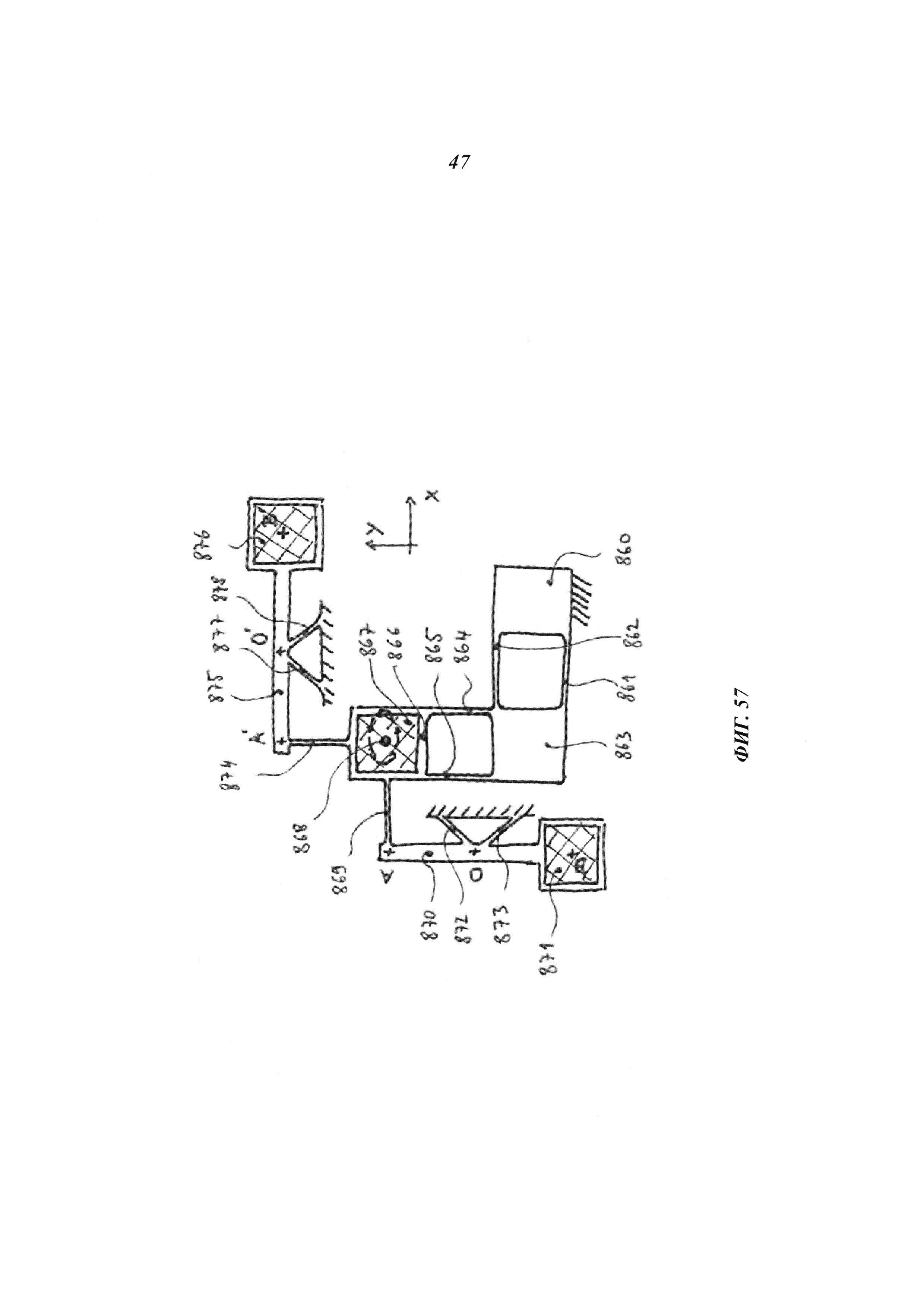
На фиг. 57 представлен вариант динамически сбалансированной изотропной пружины.
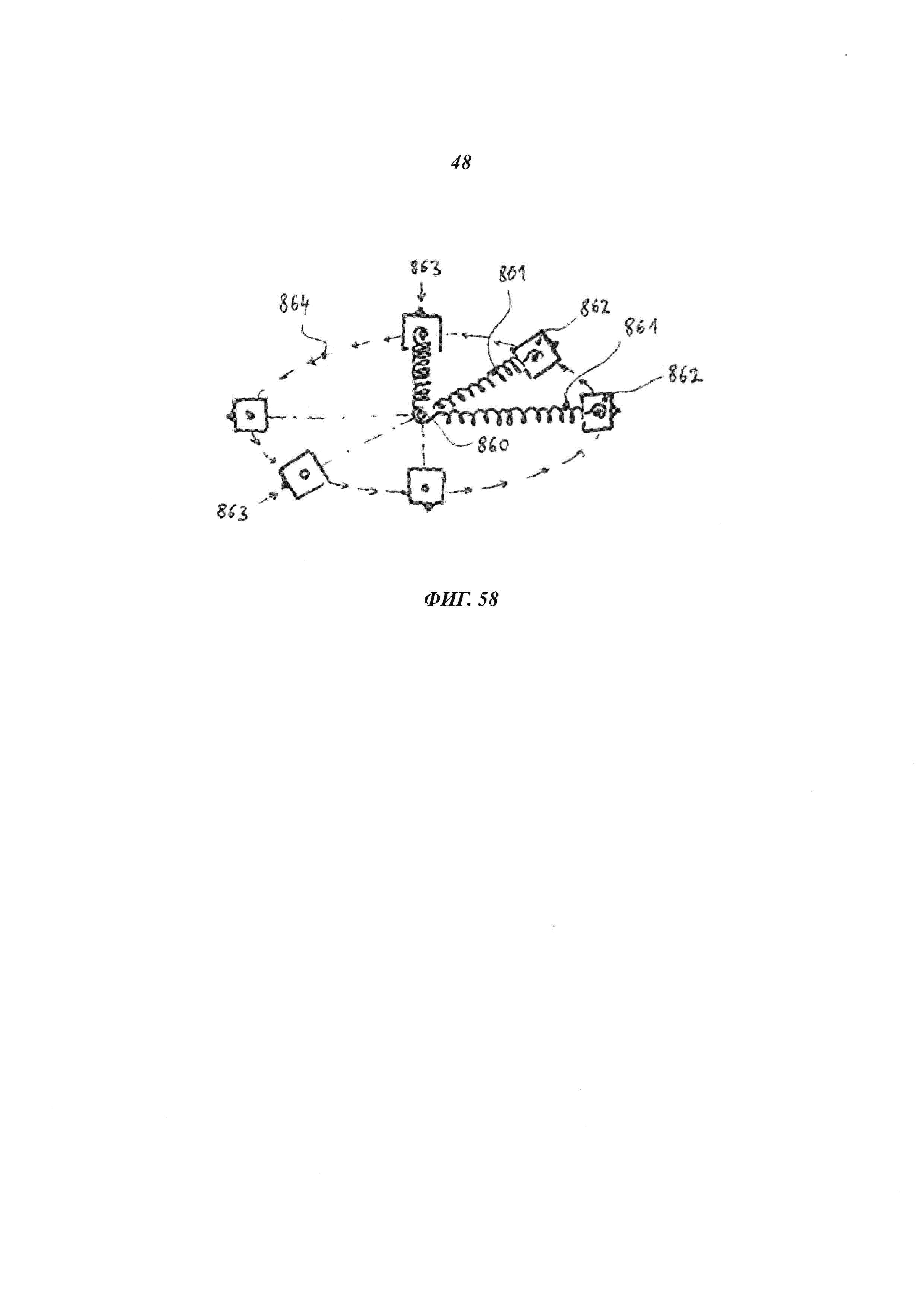
На фиг. 58 показана вращающаяся пружина.
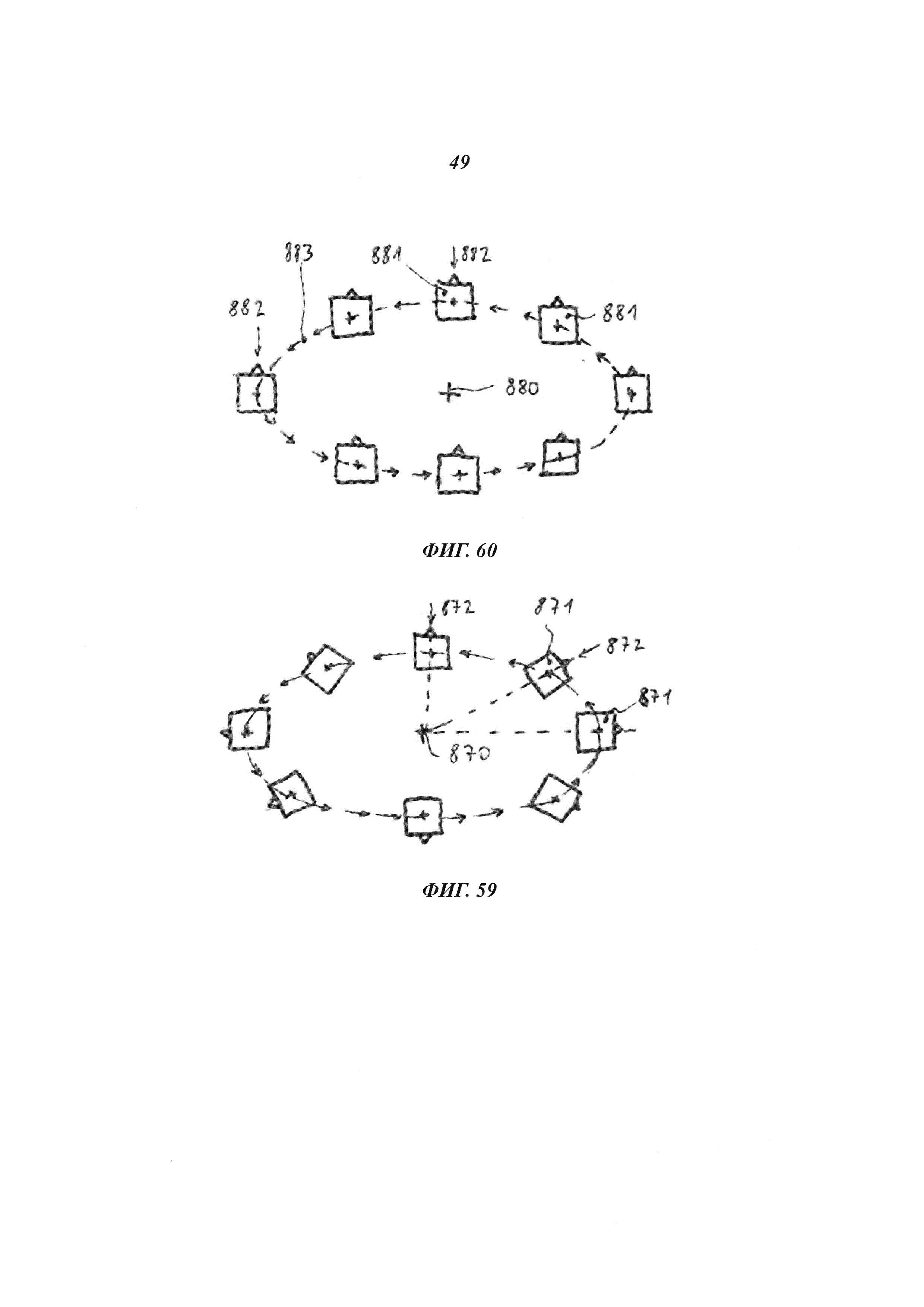
Фиг. 59 иллюстрирует тело, движущееся по эллиптической орбите с вращением.
Фиг. 60 иллюстрирует тело, движущееся по эллиптической орбите поступательно, без вращения.
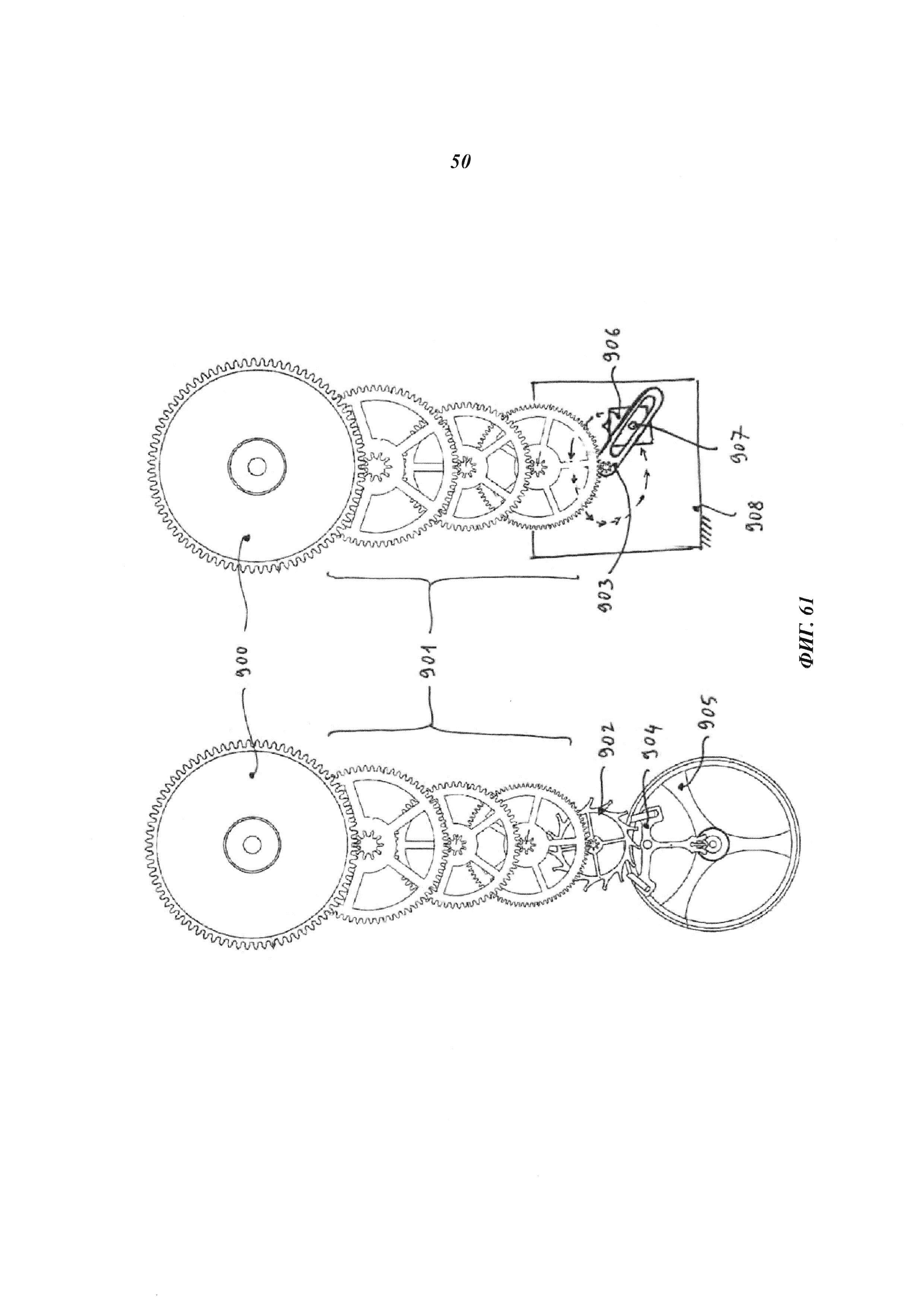
Фиг. 61 иллюстрирует интегрирование осциллятора по изобретению в стандартные механические наручные или иные часы путем замены известной пружины с балансирным колесом и спускового механизма изотропным осциллятором и приводной кулисой.
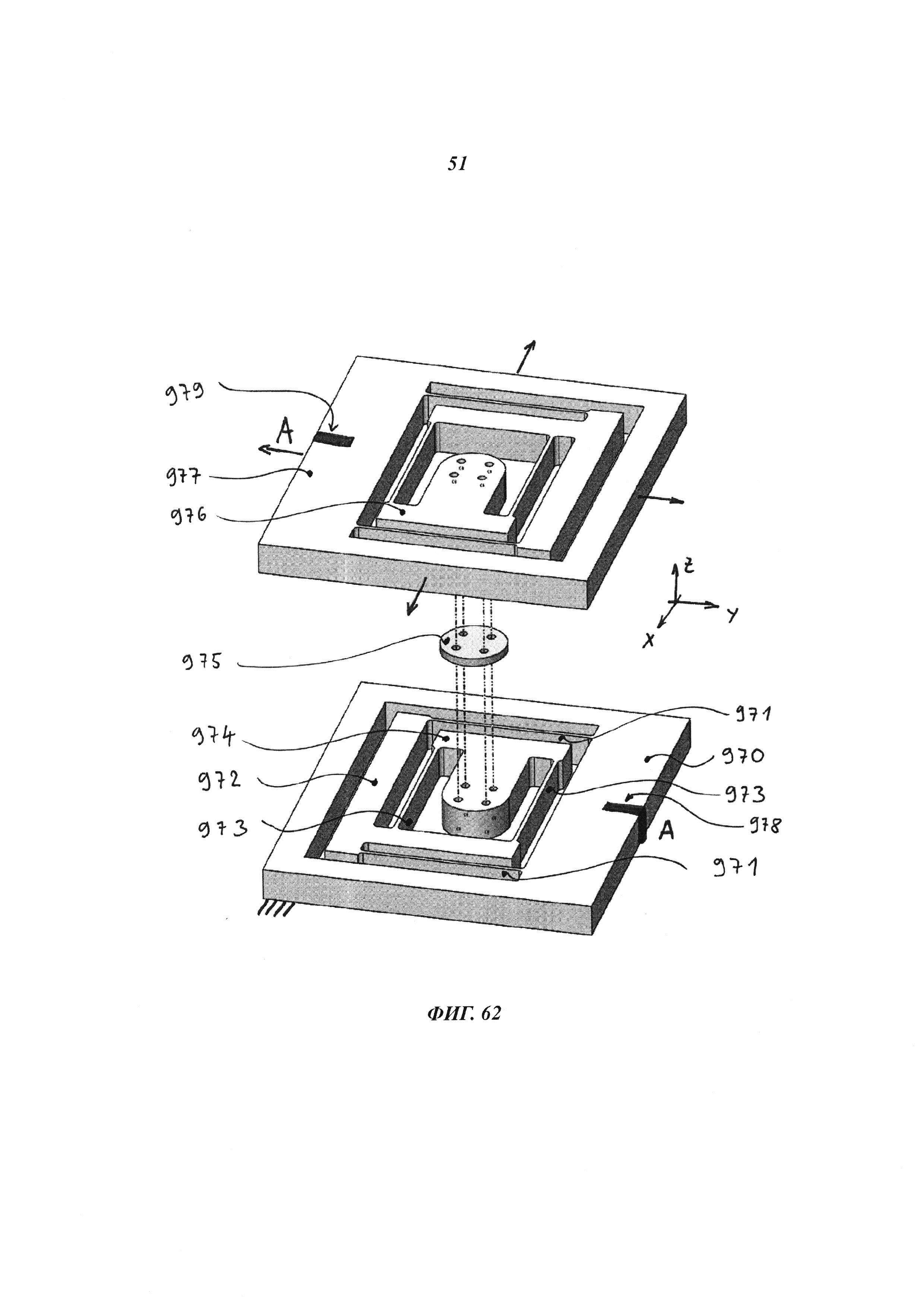
Фиг. 62 иллюстрирует сборку из двух последовательных идентичных осцилляторов с параллельными XY-пружинами, направленную на улучшение изотропии жесткости.
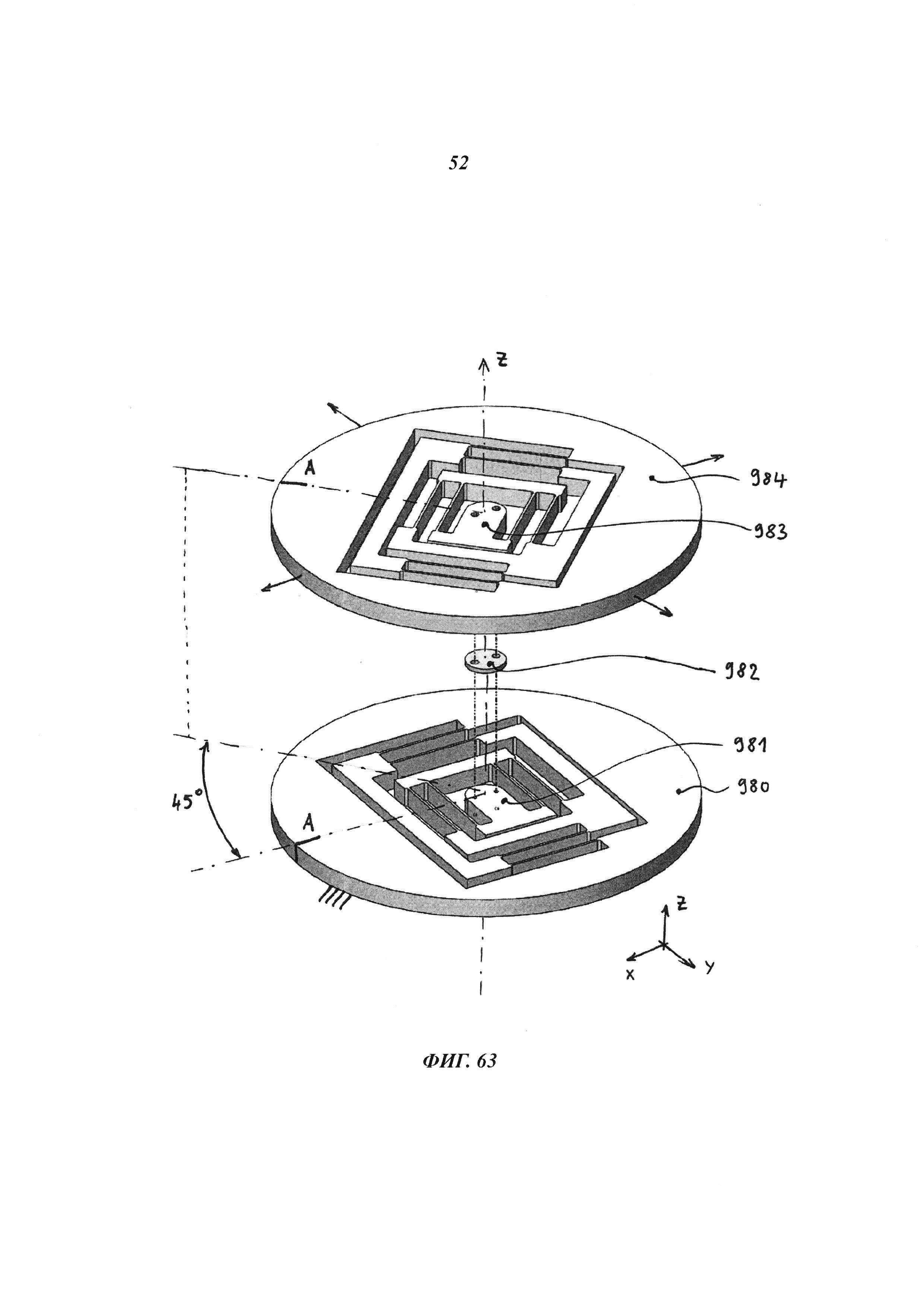
Фиг. 63 иллюстрирует сборку из двух последовательных идентичных составных осцилляторов с параллельными XY-пружинами, направленную на улучшение изотропии жесткости.
Осуществление изобретения
2 Концептуальная основа изобретения
2.1 Изохронная солнечная система Ньютона
Хорошо известно, что в 1687 г. Исаак Ньютон опубликовал трактат "Математические начала" (Principia Mathematica), в котором он обосновал законы Кеплера о движении планет, в частности первый закон, который утверждает, что планеты движутся по эллиптическим траекториям, в одном фокусе которых находится Солнце, и третий закон, который утверждает, что квадраты периодов обращения планет вокруг Солнца относятся, как кубы больших полуосей их орбит (см. ссылку [19]).
Менее известно, что в Книге 1, ПРОПОЗИЦИИ (лат. PROPOSITIO) X указанного труда он показал, что в случае замены притяжения, обратно пропорционального квадрату расстояния (см. фиг. 1), линейным притяжением центральной силы, закон (названный позднее законом Гука - см. фиг. 2 и 3) соответствовал бы движению планет по эллиптическим орбитам с Солнцем, находящимся в центре эллипса, а период обращения был бы одинаковым для всех эллиптических орбит (присутствие эллипсов в обоих законах в настоящее время объясняется относительно простой математической эквивалентностью (см. ссылку [13])). Хорошо известно также, что только в этих двух случаях законы о центральной силе приводят к замкнутым орбитам (см. ссылку [1]).
Результат Ньютона для закона Гука легко проверяется. Рассмотрим точечную массу, способную двигаться в двумерном пространстве под действием центральной силы
F(r)=-kr,
приложенной из начала координат, где r - положение массы; тогда для объекта массы m, получаем следующее решение:
(A1sin(ω0t+ϕ1), A2sin(ω0t+ϕ2),
где константы A1, А2, ϕ1, ϕ2 зависят от начальных условий и частоты,
Отсюда не только следует, что орбиты являются эллиптическими, но и что период движения зависит только от массы m и жесткости k центральной силы. Следовательно, эта модель характеризуется изохронизмом, поскольку период
не зависит от положения и момента точечной массы (аналогично третьему закону Кеплера, доказанному Ньютоном).
2.2 Реализация в качестве регулятора хода в приборе для измерения времени
Изохронизм означает, что рассмотренный осциллятор является хорошим кандидатом для использования в качестве регулятора хода в приборе для измерения времени, т.е. как вариант изобретения.
Данный осциллятор может рассматриваться как вариант изобретения с учетом того, что он не предлагался и даже не упоминался в литературе в качестве подобного регулятора.
Данный осциллятор известен также как гармонический изотропный осциллятор (здесь термин "изотропный "означает "одинаковый во всех направлениях").
Несмотря на то, что он известен с 1687 г., и на его теоретическую простоту, изотропный гармонический осциллятор, или просто "изотропный осциллятор", насколько это известно, ранее никогда не применялся как регулятор хода для наручных или иных часов. Это обстоятельство требует дополнительных пояснений.
Представляется, что главной причиной является фиксация на механизмах с постоянной скоростью, таких как механические регуляторы, в частности регуляторы скорости, а также ограниченный взгляд на конический маятник как на механизм с постоянной скоростью.
Например, в приведенном в работе [8, р. 534] описании конического маятника, потенциально приближающегося к изохронизму, отмечается его применимость к измерению очень малых интервалов времени, намного меньших, чем его период.
Глава VIII книги [3] посвящена коническому маятнику, включая аппроксимацию им изохронизма. Одна из секций этой главы посвящена применению конического маятника для измерения долей секунды (в случае периода, равного 2 с), причем утверждается, что данный подход представляется крайне эффективным. При этом указывается на различие между средней сходимостью и мгновенной сходимостью и признается, что движение конического маятника может не быть постоянным в пределах малых интервалов вследствие трудностей при настройке механизма. Таким образом, вариации в пределах периода рассматриваются как дефекты конического маятника. Это подразумевает, что при идеальных условиях маятник функционирует при постоянстве скорости.
Аналогично, при сопоставлении непрерывного и прерывистого движений в книге [9, 20-21] игнорируется изотропный осциллятор, и единственная приводимая в ней ссылка на прибор для измерения времени с непрерывным движением относится к регулятору (Вилларсо), о котором сообщается: "кажется, что он обеспечивал хорошие результаты. Однако не представляется вероятным, чтобы он был более точным, чем обычный высококачественный задающий часовой механизм или хронограф". Этот вывод подтверждается данными по регулятору Вилларсо, приведенными в статье [4].
С теоретической точки зрения данные вопросы рассмотрены в очень важной работе Джеймса Клерка Максвелла On Regulators ("О регуляторах"), которая рассматривается как одна из послуживших основной для современной теории управления (см. ссылку [18]).
Следует отметить, что изохронизм требует наличия истинного осциллятора, который должен сохранять все изменения скорости. Причина этого требования состоит в том, что волновое уравнение
сохраняет все начальные условия путем их распространения. Таким образом, истинный осциллятор должен сохранять все возмущения его скорости. С учетом этого предлагаемое изобретение допускает максимальную вариацию амплитуды осциллятора.
Это является полной противоположностью по отношению к регулятору, который должен гасить эти возмущения. В принципе возможно получение изотропного осциллятора путем исключения всех демпфирующих механизмов, приводящих к регулированию скорости.
Можно заключить, что изотропный осциллятор не применялся как регулятор хода вследствие существования концептуального недопонимания, сближающего изотропные осцилляторы с обычными регуляторами, т.е. игнорирующего простое соображение, состоящее в том, что точное измерение времени требует постоянства только полного периода, а не всех его более коротких интервалов.
Авторы изобретения утверждают, что предлагаемый осциллятор полностью отличается по своим теоретическим основам и функционированию от конического маятника и механических регуляторов, рассматриваемых далее.
Фиг. 4 иллюстрирует принцип конического маятника, а фиг. 5 - типичный механизм на основе конического маятника.
Фиг. 6 иллюстрирует регулятор Вилларсо, изготовленный Антуаном Бреге (Antoine Breguet) в 1870-х годах, а фиг. 7 - распространение сингулярности по тронутой струне.
2.3 Сравнение вращательного и поступательного орбитальных движений
Возможны два типа изотропных гармонических осцилляторов с однонаправленным движением. Для получения одного из них используют линейную пружину с закрепленным на одном ее конце телом и вращают пружину и тело вокруг неподвижного центра, как это проиллюстрировано на фиг. 58. Пружина 861 с телом 862, прикрепленным к ее концу, прикреплена к центру 860 и вращается вокруг этого центра, так что центр массы тела 862 имеет орбиту 864. Как это отмечено стрелками 863, тело 862 совершает один оборот вокруг своего центра массы за каждый полный оборот по орбите.
Совершение телом, вращающимся вокруг своего центра массы, одного полного оборота за полный оборот по орбите иллюстрируется фиг. 59. Это является примером орбитального движения с вращением: тело 871 движется по орбите вокруг точки 870 и совершает один оборот вокруг своей оси за каждый полный оборот по орбите, как это проиллюстрировано вращением индикатора 872.
Пружина такого типа, которая будет именоваться вращающимся изотропным осциллятором, будет описана в Секции 4.1. В этом случае, поскольку тело вращается вокруг своей оси, момент инерции тела оказывает влияние на динамику.
В другой возможной реализации используется масса, связанная с центральной изотропной пружиной, как это описано в Секции 4.2. В этом случае тело не вращается вокруг своего центра массы, и соответствующее движение может именоваться поступательным орбитальным движением, которое проиллюстрировано фиг. 60. Тело 881 движется по орбите 883 с центром в точке 880, не вращаясь вокруг своего центра тяжести. Таким образом, его ориентация остается неизменной, как это иллюстрируется постоянным направлением индикатора 882, связанного с телом.
В этом случае момент инерции массы не влияет на динамику.
2.4 Интегрирование изотропного гармонического осциллятора в стандартное механическое движение
Предлагаемый регулятор хода, использующий изотропный осциллятор, будет регулировать механический прибор для измерения времени. Это можно реализовать простой заменой колебательной системы с балансирным колесом и спиральной пружиной изотропным осциллятором и спусковым механизмом с вращающимся компонентом, прикрепленным к последнему колесу зубчатой передачи. Известный вариант показан на фиг. 61 слева. Главная пружина 900 передает энергию через систему 901 зубчатых колес спускному колесу 902, которое дискретными порциями передает энергию балансирному колесу 905 через анкер 904. Справа показан предложенный механизм. Главная пружина 900 передает энергию через систему 901 зубчатых колес кулисе 903, которая непрерывно передает энергию изотропному осциллятору 906 через палец 907, перемещающийся в прорези этой кулисы. Изотропный осциллятор прикреплен к неподвижной рамке 908, и его центр восстанавливающей силы совпадает с центром шестерни, связанной с кулисой.
3 Теоретические требования к физической реализации
Чтобы реализовать изотропный гармонический осциллятор согласно изобретению, требуется физическая конструкция, обеспечивающая центральную восстанавливающую силу. Сначала можно отметить, что теория движения массы относительно центральной восстанавливающей силы исходит из того, что результирующее движение лежит в плоскости. Отсюда следует, что, из практических соображений, физическая конструкция должна реализовывать планарную изотропию. Как следствие, описываемые далее конструкции и варианты будут соответствовать, в основном, планарной изотропии, но не ограничиваться ею, т.е. будет приведен и пример трехмерной изотропии.
Чтобы получить при физической реализации изохронные орбиты для регулятора хода, необходимо как можно ближе следовать теоретической модели, изложенной в Секции 2. Жесткость k пружины является независимой от направления и постоянной, а также независимой от радиального положения (т.е. пружина является линейной). В теории масса является точечной и, следовательно, имеющей, в отсутствие вращения, момент инерции J=0. Приведенная масса m является изотропной и также независимой от положения. Результирующий механизм желательно сделать нечувствительным к силе тяжести и к линейным и угловым ударам. Таким образом, должны выполняться следующие условия.
Изотропность k. Жесткость k пружины изотропна (не зависит от направления).
Радиальность k. Жесткость k пружины не зависит от радиального смещения (линейная пружина).
Нулевой J. Масса m с моментом инерции J=0.
Изотропность m. Приведенная масса m изотропна (не зависит от направления).
Радиальность m. Приведенная масса m не зависит от радиального смещения.
Сила тяжести. Нечувствительность к силе тяжести.
Линейный удар. Нечувствительность к линейному удару.
Угловой удар. Нечувствительность к угловому удару.
4 Реализация изотропного гармонического осциллятора
Планарная изотропия может быть реализована двумя путями.
4.1 Вращающиеся пружины, приводящие к вращающемуся изотропному осциллятору
А.1. Вращающаяся площадка 1, на которой закреплена пружина 2 с жесткостью k; нейтральная точка пружины совпадает с центром вращения площадки - см. фиг. 8. В предположении о нулевой массе площадки 1 и пружины 2 данный механизм реализует линейную центральную восстанавливающую силу. Однако вследствие физической реальности вращающейся площадки и пружины данной реализации свойственны недостатки: значительные паразитные массы и момент инерции.
А.2. На фиг. 9 представлена консольная пружина 3, поддерживаемая внутри рамки 4 и вращающаяся вокруг продольной оси. Этот вариант также реализует центральную линейную восстанавливающую силу, но уменьшает паразитный момент инерции за счет использования цилиндрической массы и аксиальной пружины. Числовое моделирование показывает, что отклонение от изохронизма все еще значительно. Была построена физическая модель (см. фиг. 10), в которой вертикальное движение массы 503 было минимизировано путем прикрепления массы к сдвоенной плоской пружине 504, 505, обеспечивающей приближенно линейное перемещение вместо приближенно кругового перемещения единственной пружины по фиг. 9. Вращающаяся рамка 501 связана с неподвижной частью 506 посредством изотропного подшипника 502.
Следует отметить, что сила тяжести не влияет на пружину, когда она ориентирована вдоль своей оси. Однако соответствующие реализации имеют тот недостаток, что пружина и несущая ее часть вращаются вокруг их собственных осей, что создает компоненты паразитного момента инерции, ухудшающие теоретический изохронизм модели. Действительно, рассматривая точечную массу m и дополнительно учитывая ее изотропную поддержку с моментом инерции I и постоянный суммарный угловой момент L, уравнения движения (если игнорировать трение) сводятся к виду:

Это уравнение может быть решено в терминах эллиптических функций Якоби с выражением периода в терминах эллиптических интегралов первого рода (см. ссылку [17] в отношении введенных определений и аналогичных приложений в механике). Численный анализ этих решений показывает, что, если не минимизирован момент инерции I, отклонение от изохронизма является значительным.
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этих реализаций, в частности для вращающейся консольной пружины.
4.2 Изотропные пружины с орбитами при поступательном движении.
Реализации, которые представляются наиболее подходящими для сохранения теоретических характеристик гармонического осциллятора, - это те, в которых центральная сила реализована изотропной пружиной (здесь термин "изотропная", как и раньше, означает "одинаковая во всех направлениях").
На фиг. 16 представлен простой пример, иллюстрирующий простую планарную изотропную пружину с орбитальной массой 10, пружиной 11 по координате y, пружиной 12 по координате x, креплением 13 пружины 11 к основанию, креплением 14 пружины 12 к основанию и с горизонтальным основанием 15. Ось у является вертикальной, т.е. параллельной силе тяжести. В данном примере две пружины Sx 12 и Sy 11 с жесткостью к установлены так, что пружина Sx 12 действует вдоль горизонтальной оси x, а пружина Sy 11 - вдоль вертикальной оси y. Масса m 10 прикреплена к обеим пружинам 11, 12. При этом геометрия выбрана такой, что в точке (0, 0) обе пружины находятся в своем нейтральном положении.
Можно показать, что этот механизм демонстрирует изотропию первого порядка, как это иллюстрируется фиг. 17. При наличии малого смещения dr=(dx,dy) восстанавливающая сила Fx в направлении x равна, с точностью до первого порядка, -kdx, а восстанавливающая сила Fy в направлении у равна -kdy. Тогда полная восстанавливающая сила составит:
F(dr)=(-kdx,-kdy)=-kdr, что соответствует центральной линейной восстанавливающей силе согласно Секции 2. Отсюда следует, что этот механизм, как было предсказано выше, с точностью до первого порядка обеспечивает реализацию центральной линейной восстанавливающей силы.
В данных реализациях сила тяжести влияет на пружины 11, 12 во всех направлениях, поскольку она изменяет эффективную постоянную пружины. Однако пружины 11, 12 не вращаются вокруг своих осей, минимизируя паразитные моменты инерции, а центральная сила реализована непосредственно самой пружиной. Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этих реализаций (с точностью до первого порядка).

Было предложено много пленарных пружин, и если некоторые из них могли быть реально изотропными, ни одна из них не была явно охарактеризована как изотропная. В литературе (см., в частности, ссылку [14, р. 166, 168]) предлагались два механизма, которые обладают планарной изотропией. Однако эти примеры, как и только что описанный выше, не обладают достаточной изотропией, чтобы получить столь же точный регулятор хода в приборе для измерения времени, что и рассматриваемый в данном описании вариант изобретения.
Представленный на фиг. 11 вариант содержит две последовательно установленных пары аналогичных стержней 5, образующих так называемое сочленение с параллельными рычагами, которое обеспечивает для малых смещений возможность поступательных перемещений в направлениях X и Y. Другой вариант, представленный на фиг. 12, содержит 4 параллельных стержня 6, связанных с 8 сферическими шарнирами 7, и центральный сильфон 8, соединяющий подвижную платформу 9 с основанием.
С учетом изложенного были разработаны более прецизионные изотропные пружины. Такие пружины (значительно улучшенные в отношении изотропности) положены в основу нескольких вариантов, описанных далее.
В этих вариантах пружина не вращается вокруг своей оси, что минимизирует паразитные моменты инерции, а центральная сила обеспечивается непосредственно самой пружиной. Данные пружины именуются изотропными, поскольку их восстанавливающая сила одинакова во всех направлениях.
Базовый пример варианта осциллятора, построенный на основе планарной изотропной пружины согласно изобретению, представлен на фиг. 18А. Он представляет собой механический изотропный гармонический осциллятор, содержащий соединение L1/L2 по меньшей мере с двумя степенями свободы, использующее соответствующие направляющие средства (например направляющие скольжения или подходящие связи, пружины и т.д.) и поддерживающее орбитальную массу Р относительно неподвижного основания В посредством пружин S, обладающих изотропностью и обеспечивающих линейную восстанавливающую силу K.
5 Компенсационные механизмы
Чтобы встроить, согласно варианту изобретения, новый осциллятор в портативный прибор для измерения времени, необходимо решить проблему сил, которые могут влиять на правильное функционирование осциллятора. Эти силы включают силу тяжести и ударные нагрузки (удары).
5.1 Компенсация силы тяжести
Первый способ решить проблему силы тяжести состоит в создании планарной изотропной пружины, которая, находясь в горизонтальном положении, нечувствительна к воздействию силы тяжести.
Фиг. 19 иллюстрирует пример такого выполнения пружины в виде конструкции планарной изотропной пружины с двумя степенями свободы. В этой конструкции сила тяжести оказывает пренебрежимо малое влияние на планарное движение орбитальной массы в случае горизонтального положения плоскости механизма. Данный механизм, который обеспечивает единственное направление минимизации эффекта гравитации, содержит неподвижное основание 20, промежуточный блок 21, рамку 22, несущую орбитальную массу 23, пружинный блок 24, параллельный оси y, и пружинный блок 25, параллельный оси x.
Однако данный механизм адекватен только для стационарных часов. Применительно к портативному прибору для измерения времени необходима компенсация. Она может быть достигнута изготовлением копии осциллятора и соединением обоих экземпляров посредством шарового или универсального шарнира, как это показано на фиг. 20. В варианте по фиг. 20 центр силы тяжести всего механизма остается зафиксированным. Более конкретно, фиг. 20 иллюстрирует компенсацию силы тяжести для планарной изотропной пружины во всех направлениях. Жесткая рамка 31 несет регулятор хода, содержащий два связанных (не независимых) пленарных изотропных осциллятора 32 (представленных достаточно условно). К рамке 31 посредством шарового шарнира 34 (или универсального шарнира) присоединена тяга 33. Две части тяги являются телескопическими благодаря использованию двух призматических сочленений 35. Противоположные концы тяги 33 прикреплены к орбитальным массам 36 посредством шаровых шарниров. Данный механизм симметричен относительно нулевой точки, соответствующей центру шарнира 34.
5.2 Динамическая балансировка линейного ускорения
Линейные удары (ударные нагрузки) соответствуют линейному ускорению, т.е. включают, как частный случай, силу тяжести. Следовательно, механизм по фиг. 20 компенсирует также линейные удары.
5.3 Динамическая балансировка углового ускорения
Эффекты, обусловленные угловыми ускорениями, могут быть минимизированы за счет уменьшения расстояния между центрами силы тяжести двух масс путем модифицирования рассмотренного механизма по фиг. 20 (как это показано на фиг. 21). Прецизионная настройка расстояния "I" (см. фиг. 21), разделяющего два центра силы тяжести, делает возможной полную компенсацию угловых ударов, включая учет момента инерции самой тяги. Данный вариант учитывает угловые ускорения для всех возможных осей вращения, за исключением ускорений вдоль оси вращения осцилляторов.
Более конкретно, фиг. 21 иллюстрирует компенсацию силы тяжести во всех направлениях для планарной изотропной пружины с введением сопротивления угловому ускорению. Это достигнуто минимизацией расстояния "I" между центрами силы тяжести двух орбитальных масс. Жесткая рамка 41 несет регулятор хода, содержащий два связанных (не независимых) пленарных изотропных осциллятора 42 (представленных достаточно условно). К рамке 41 посредством шарового шарнира 47 (или универсального шарнира) присоединена тяга 43. Две части тяги являются телескопическими благодаря использованию двух призматических сочленений 48. Противоположные концы тяги 43 прикреплены к орбитальным массам 46 посредством шаровых шарниров 49. Данный механизм симметричен относительно нулевой точки, соответствующей центру шарнира 47.
Фиг. 22 иллюстрирует другой вариант компенсации силы тяжести во всех направлениях для планарной изотропной пружины, использующий гибкие элементы. В этом варианте жесткая рамка 51 несет регулятор хода, содержащий два связанных (не независимых) пленарных изотропных осциллятора 53 (представленных достаточно условно). К рамке 51 посредством универсального шарнира, образованного плоской пружиной 56 и гибким стержнем 57, прикреплена тяга 54. Две части тяги являются телескопическими благодаря использованию двух плоских пружин 55. Противоположные концы тяги 54 прикреплены к орбитальным мессам 52 двумя плоскими пружинами 55, которые образуют две универсальных x-y шарнира.
Фиг. 23 иллюстрирует альтернативный вариант компенсации силы тяжести во всех направлениях для планерной изотропной пружины, использующий гибкие элементы. В этом варианте обе конца тяги 64 прикреплены к орбитальным массам 62, связанным с пружинами 63 осциллятора, двумя взаимно перпендикулярными гибкими стержнями 61.
Фиг. 24 иллюстрирует еще один вариант компенсации силы тяжести во всех направлениях для изотропной пружины, использующий гибкие элементы. В этом варианте неподвижная пластина 71 несет регулятор хода, содержащий две симметрично расположенные связанные (не независимые) пленарные изотропные орбитальные массы 72. Каждая орбитальная масса 72 связана с неподвижной пластиной тремя параллельными стержнями 73, которые являются либо гибкими стержнями, либо жесткими стержнями с шаровым шарниром 74 на каждом конце. Тяге 75 прикреплена к неподвижному основанию посредством (необозначенного) гибкого мембранного соединения и гибкого вертикального стержня 78, образующих универсальный шарнир. Концы тяги 75 прикреплены к орбитальным массам 72 двумя гибкими мембранами 77. Честь 79 жестко связана с честью 71. Чести 76 и 80 жестко связаны с тягой 75.
6 Поддержание и счет
Осцилляторы теряют энергию вследствие трения, так что требуется способ поддерживания энергии осцилляторе. Требуется также способ для подсчета колебаний, чтобы отображать время, измеряемое осциллятором. В механических, в частности наручных, часах эти задачи решаются с помощью спускового механизма, который является интерфейсом между осциллятором и остальной частью прибора для измерения времени. Принцип действия спускового механизма иллюстрируется на фиг. 15, причем подобные устройства хорошо известны в часовой промышленности.
В рамках изобретения предлагаются два основных способа решения той же задачи: без спускового механизма и с упрощенным спусковым механизмом.
6.1 Механизмы без спускового механизма
Чтобы снабжать энергией изотропный гармонический осциллятор, к нему прикладывают крутящий момент или усилие. На фиг. 13 иллюстрируется принцип непрерывного приложения крутящего момента Т для поддержания энергии осциллятора, а фиг. 14 иллюстрирует другой принцип, согласно которому, чтобы поддерживать энергию осциллятора, к нему дискретно (прерывисто) прикладывают силу FT. На практике, в частности в рассматриваемом случае, требуется также механизм, чтобы передать на осциллятор подходящий крутящий момент с целью поддержания его энергии. Предложенные для этой цели различные варианты вращающегося компонента согласно изобретению показаны на фиг. 25-29. Фиг. 37 и 38 иллюстрируют спусковые системы для той же цели. Все эти механизмы для восстановления энергии (в частности механизм 138, представленный на фиг. 30) могут быть использованы в комбинации с различными рассматриваемыми вариантами осцилляторов и осцилляторных систем (с использованием различных блоков), например по фиг. 19-24, 30-35 и 40-48. В типичном случае в варианте изобретения, в котором осциллятор используется как регулятор хода в приборе для измерения времени, в частности в наручных часах, крутящий момент/усилие может создаваться часовой пружиной наручных часов, используемой в сочетании со спусковым механизмом, как это хорошо известно применительно к наручным часам. Следовательно, в этом варианте известный спусковой механизм может быть заменен осциллятором по изобретению.
Фиг. 25 иллюстрирует принцип поддержания энергии осциллятора с использованием вращающегося компонента с переменным радиусом. Стержень 83, установленный на ось 82, вращается относительно неподвижной рамки 81. Призматическое сочленение 84 позволяет обеспечить изменяемый радиус вращения конца стержня. Орбитальная масса регулятора (не изображена) прикреплена к концу стержня через цапфу 85. В результате данный механизм не изменяет ориентацию орбитальной массы, тогда как стержень 83 обеспечивает поддержание энергии колебаний.
Фиг. 26 иллюстрирует реализацию кулисы с переменным радиусом, прикрепленной к осциллятору для поддержания его энергии. Неподвижная рамка 91 несет ось 92 кулисы, к которой приложен поддерживающий энергию крутящий момент М. Кулиса 93, прикрепленная к оси 92, снабжена призматической прорезью 93'. В прорезь 93' введен жесткий палец 94, прикрепленный к орбитальной массе 95. Пленарные изотропные пружины обозначены, как 96. На фиг. 26 представлены как вид сверху, так и перспективное изображение, в разрезе.
Фиг. 27 иллюстрирует вариант компонента с переменным радиусом и гибкими элементами, служащего для поддержания энергии осциллятора. Компонент 102 приводится, посредством вала 105, во вращение относительно неподвижной рамки (не изображена). Два параллельных гибких стержня 103 связывают компонент 102 с его концевым участком 101. Шарнир 104 связывает механизм, показанный на фиг. 27, с орбитальной массой. На фиг. 27 механизм показан в своем единственном нейтральном положении.
Фиг. 28 иллюстрирует другой вариант компонента с гибкими элементами и с переменным радиусом для поддержания энергии осциллятора. Компонент 112 приводится, посредством вала 115, во вращение относительно неподвижной рамки. Два параллельных гибких стержня 113 связывают компонент 112 с его концевым участком 111. Шарнир 114 связывает данный механизм с орбитальной массой. На фиг. 28 механизм показан в положении, смещенном с нейтрального положения.
Фиг. 29 иллюстрирует альтернативный вариант компонента с гибкими элементами и с переменным радиусом для поддержания энергии осциллятора. Компонент 122 приводится, посредством своего вала, во вращение относительно неподвижной рамки 121. Два параллельных гибких стержня 123 связывают компонент 122 с его концевым участком 124. Шарнир 126 связывает данный механизм с орбитальной массой 125. В этом варианте средний радиус орбиты соответствует минимальному изгибу гибких стержней 123.
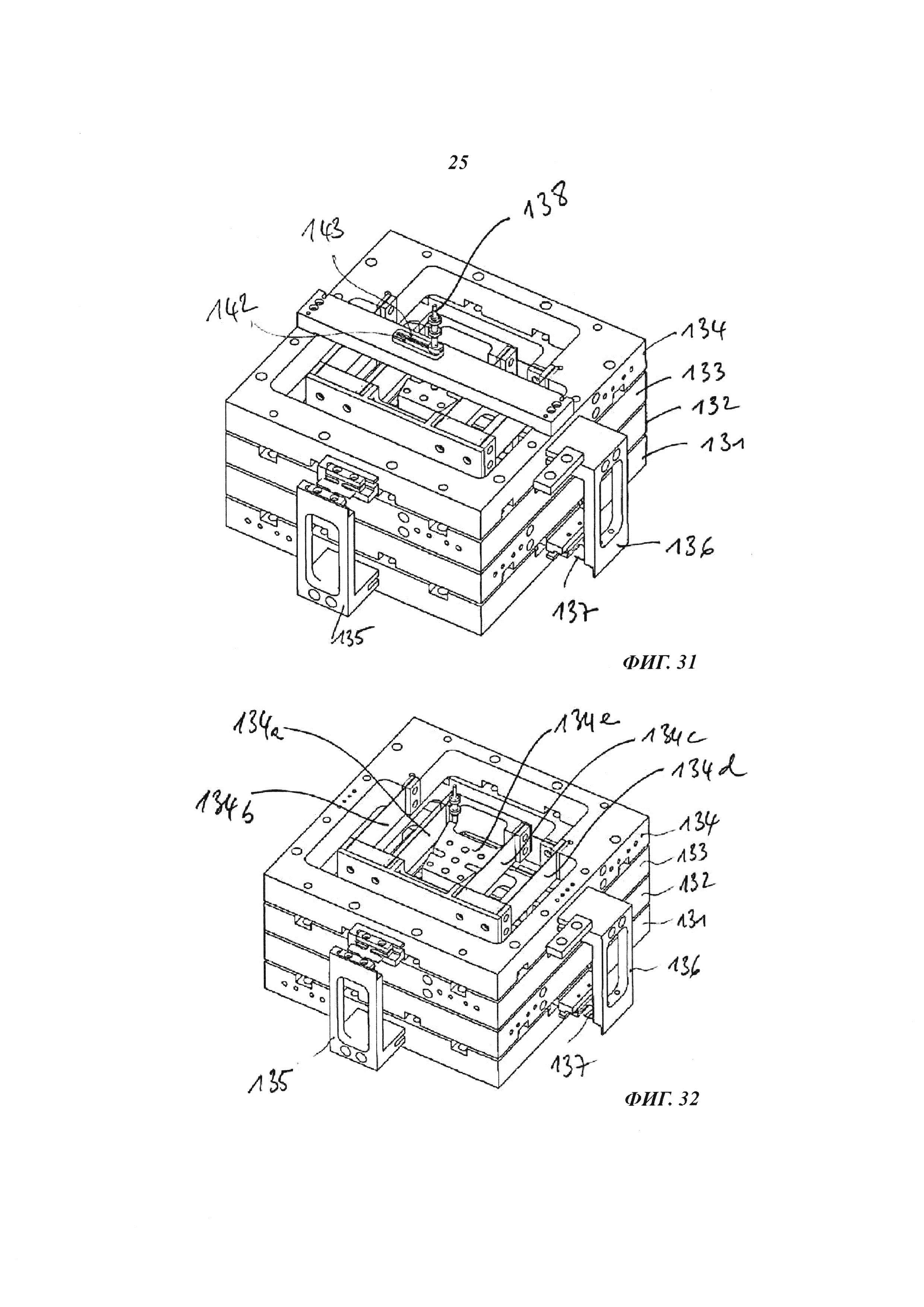
Фиг. 30 иллюстрирует пример полностью собранного изотропного осциллятора 131-137 и его механизм для поддержания энергии. Более конкретно, неподвижная рамка с тремя жесткими опорами 140 и верхней рамкой 140а прикреплена к основанию или к неподвижному референтному объекту (например к объекту, на который или в котором установлен осциллятор). Первый составной блок (составная ступень) 131 параллельных пружин несет второй блок 132 параллельных пружин, движущийся ортогонально указанному блоку 131. Составной блок 132 параллельных пружин жестко прикреплен к блоку 131. Четвертый составной блок 134 параллельных пружин несет третий блок 133 параллельных пружин, движущийся ортогонально пружинному блоку 134. Наружные рамки блоков 133 и 134 кинематически связаны в направлениях x и y посредством L-образных скоб 135 и 136, а также плоских пружин 137. Две наружные рамки блоков 131 и 134 образуют орбитальную массу осциллятора, тогда как блоки 132-133 соединены друг с другом и прикреплены к опоре 140. Следовательно, орбитальная масса движется относительно блоков 132-133. Альтернативно, движущаяся масса может быть образована блоками 132-133; в этом случае блоки 131 и 134 прикреплены к опоре 140.
Скоба 139, установленная на орбитальную массу, снабжена жестким пальцем 138 (см. фиг. 30 и 31), к которому прикладывается поддерживающее усилие, например крутящий момент или сила, идентично или эквивалентно тому, как это было описано со ссылками на фиг. 25-29.
Каждый блок 131-134 может быть выполнен, например, так, как это показано на фиг. 19 или на фиг. 42-47, которые будут подробно рассмотрены далее. Соответственно, описание, относящееся к этим фигурам, применимо и к блокам 131-134, проиллюстрированным на фиг. 30-35. Как будет описано далее, чтобы обеспечить компенсацию, блоки 131 и 132 (или блоки 133 и 134) сделаны идентичными, но взаимно развернутыми (например на 90°), чтобы сформировать XY-планарные изотропные пружины, рассмотренные выше.
На фиг. 31 представлен тот же вариант, что и на фиг. 30, причем хорошо виден жесткий палец 138, прикрепленный к орбитальным массам (т.е., как было упомянуто, к блокам 134 и 131) и входящий в прорезь 142 кулисы 143. Данный палец действует как привод кулисы и поддерживает процесс колебаний. Остальные части имеют те же обозначения, что и на фиг. 30 и в ее описании. Использованная система с вращающимся компонентом может быть любой из проиллюстрированных на фиг. 25-29 и описанных выше.
На фиг. 32 представлены блоки 131-134 согласно варианту по фиг. 30 и 31 (и с теми же обозначениями) без кулисной системы 142-143.
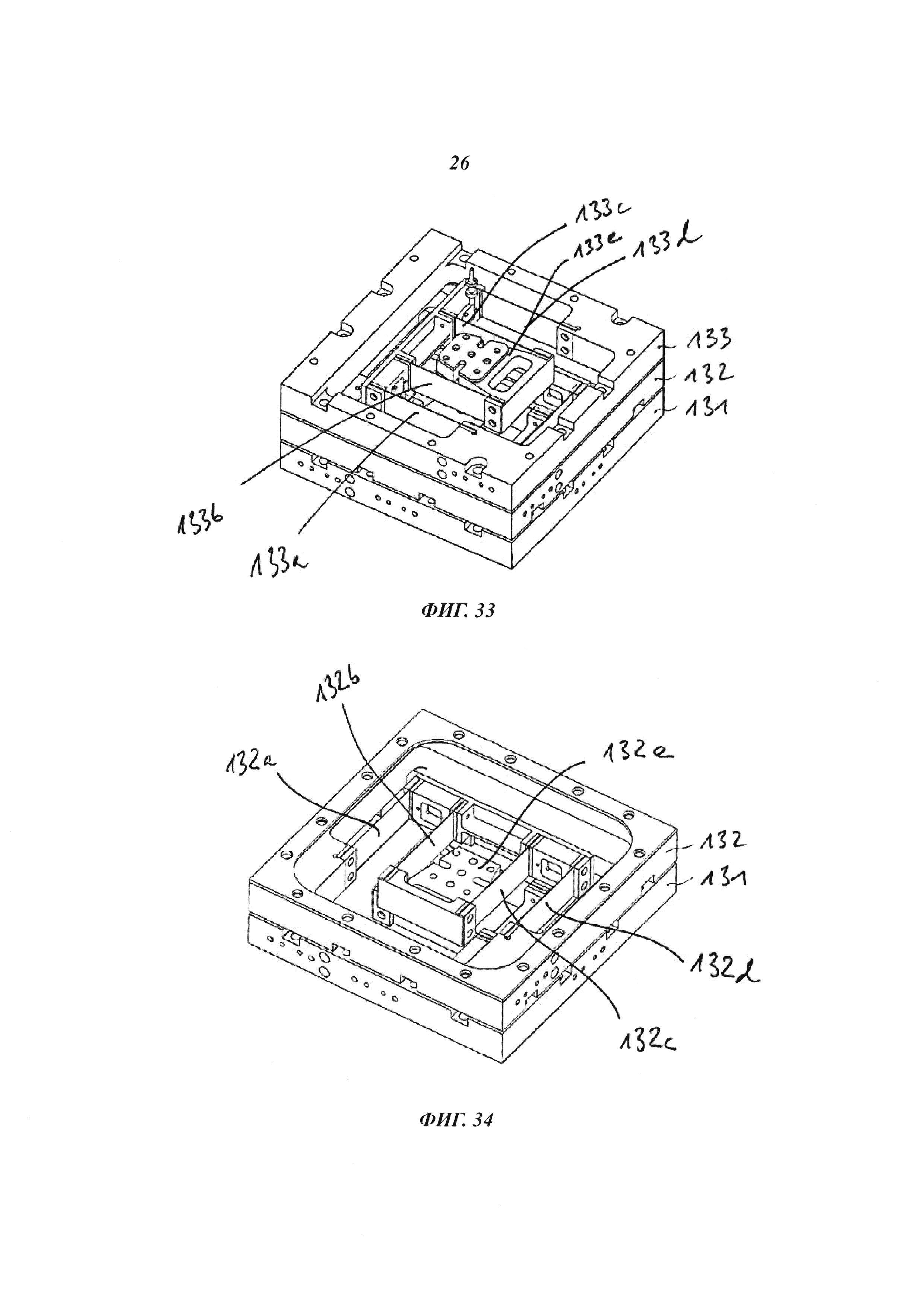
На фиг. 33 представлены блоки 131-133 согласно варианту по фиг. 32 (с теми же обозначениями, что и на фиг. 30) без блока 134.
На фиг. 34 представлены блоки 131-132 согласно варианту по фиг. 33 (с теми же обозначениями, что и на фиг. 30) без третьего блока 133.
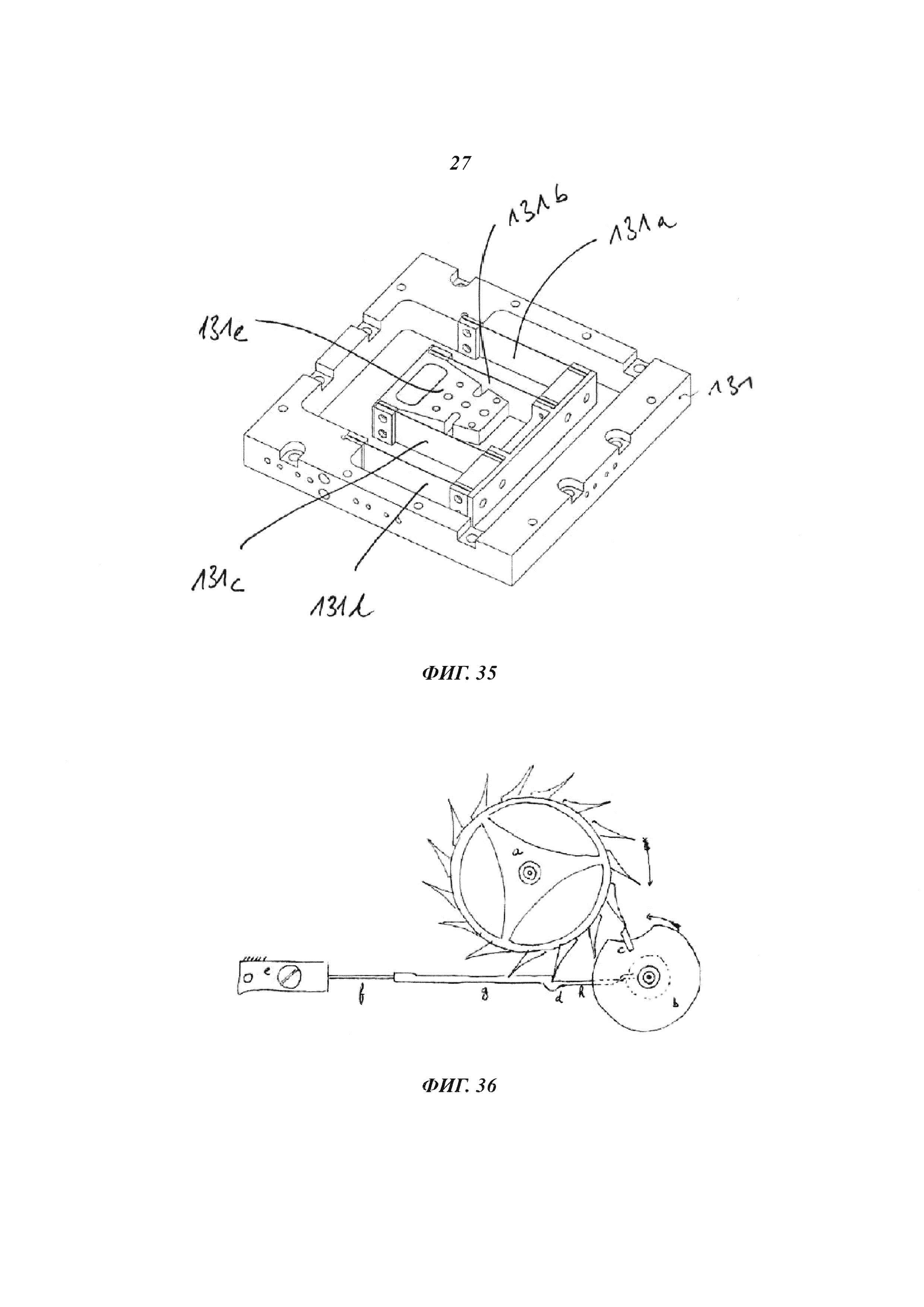
На фиг. 35 представлен блок 131 по фиг. 34 (с теми же обозначениями, что и на фиг. 30) без блока 132.
В типичном случае каждый блок 131-134 может быть выполнен согласно вариантам, которые будут описаны далее со ссылками на фиг. 41-48. В частности, блок 131 по фиг. 35 содержит параллельные пружины 131a-131d, которые несут массу 131е, тогда как пружины и массы, показанные на фиг. 41-48, могут соответствовать аналогичным компонентам по фиг. 30-35.
Чтобы построить осциллятор по фиг. 30, блоки 131 и 132 взаимно разворачивают (как это было упомянуто выше) на 90°, и их массы 131е-132е прикрепляют одну к другой (см. фиг. 34, 35). Полученная при этом конструкция эквивалентна описанной далее конструкции по фиг. 43 с двумя параллельными пружинами, ориентированными в каждом из направлений X, Y.
Блоки 133 и 134 закреплены так же, как и блоки 131-132, и размещены, в зеркальной конфигурации, над блоками 131-132. Блок 133 содержит (подобно блокам 131 и 132) пружины 133a-133d и массу 133е. При этом блок 133 развернут на 90° относительно блока 132, как это показано на фиг. 33. Рамки блоков 132 и 133 прикреплены одна к другой, что устраняет возможность их взаимного перемещения.
Как это проиллюстрировано на фиг. 32, добавляемый четвертый блок 134 развернут на 90° относительно блока 133. Блок 134 также содержит пружины 134а-134d и массу 134е. Масса 134е прикреплена к массе 133е, и два блока 134, 131 соединены посредством скоб 135, 136 с формированием орбитальной массы, тогда как соединенные друг с другом блоки 132, 133 прикреплены к рамке 140, 140а.
Как показано на фиг. 31, механизм для приложения поддерживающего усилия или крутящего момента, установленный сверху на блоки 131-134, содержит палец 138 и кулисную систему 142, 143, например, идентичную системе, показанной на фиг. 26, так что палец 94 на фиг. 26 соответствует пальцу 138 на фиг. 31, кулиса 93 - кулисе 142, а прорезь 93' - прорези 143.
Разумеется, блоки 131-134 по фиг. 30-34 могут быть заменены другими эквивалентными блоками, обладающими XY-планарной изотропией согласно принципу изобретения. Например, построить осциллятор согласно изобретению можно, используя конфигурации и варианты по фиг. 40-48.
6.2 Изотропные гармонические осцилляторы для обобщенных координат
Рассмотренные в предыдущей секции XY-изотропные гармонические осцилляторы могут быть обобщены путем замены поступательных перемещений по X и по Y другими движениями, в частности вращением. При представлении теории в обобщенных координатах Лагранжевой механики она имеет идентичную форму, а соответствующие механизмы будут иметь те же изотропные гармонические свойства, что и механизмы с поступательным движением по XY-координатам.
На фиг. 51 показан XY-изотропный гармонический осциллятор с обобщенными координатами вращения X и Y. На неподвижном основании 720 закреплены две неподвижные опоры 721, которые несут вращающуюся рамку 722, установленную в рубиновых подшипниках на опоры 721, и спиральную пружину 724. Внутри рамки 722 находится балансирное колесо, которое может вращаться и которое находится на оси балансира (не изображена), вращающейся в рубиновых подшипниках 723. К балансирному колесу прикреплена спиральная пружина 726, обеспечивающая восстанавливающую силу для круговых колебаний балансирного колеса вокруг своей оси. Спиральная пружина 724 обеспечивает восстанавливающую силу для вращения рамки 722 вокруг ее нейтрального положения, в котором ось балансирного колеса перпендикулярна основанию 720. Момент инерции узла балансирного колеса, включая рамку, таков, что собственная частота комбинации балансирного колеса и пружины 725 равна собственной частоте комбинации рамки, балансирного колеса и пружины 724. Колебания балансирного колеса моделируют изотропный гармонический осциллятор, и при малых амплитудах колебаний масса 727 на балансирном колесе движется по однонаправленной орбите, аппроксимирующейся эллипсом (см. фиг. 52). Преимущество этого механизма состоит в том, что он, в отличие от стандартного поступательного XY-изотропного осциллятора, нечувствителен к линейному ускорению и к силе тяжести. При этом его свойства таковы:

Из фиг. 52 видно, что палец, находящийся на балансирном колесе по фиг. 51, движется по примерно эллиптической орбите на сфере, что позволяет поддерживать функционирование этого механизма посредством вращающегося компонента подобно XY-поступательным изотропным гармоническим осцилляторам. На фиг. 52 проиллюстрировано движение массы 727 (см. фиг. 51) в процессе колебаний балансира и рамки. Сфера 734 представляет пространство всех возможных положений массы 727 для сравнительно значительных колебаний балансирного колеса и рамки. При этом на фиг. 52 отображена ситуация для малых колебаний, в процессе которых масса 732 движется по периодической орбите 733 вокруг своей нейтральной точки 731. Угловое движение массы 732 всегда происходит в одном и том же направлении и не останавливается.
Из фиг. 53 видно, что, если откладывать углы X и Y на плоскости, то будет построена та же эллиптическая орбита, что и при поступательном движении по X и Y. Фиг. 53 иллюстрирует угловые параметры механизма по фиг. 51. Масса 741 соответствует массе 727 по фиг. 51. Угол θ - угол поворота балансирного колеса по фиг. 51 вокруг своей оси относительно нейтрального положения, а угол ϕ - это угол поворота рамки 722 по фиг. 51 вокруг своей оси относительно нейтрального положения. В системе координат θ-ϕ масса 741 движется по периодической орбите 742 вокруг своей нейтральной точки 740. Орбита 742 является идеальным эллипсом, причем, согласно результату Ньютона, все такие орбиты будут иметь одинаковый период.
На фиг. 54 показан XY-изотропный гармонический осциллятор с поступательным перемещением X и с вращением Y. Можно видеть, что палец на балансирном колесе имеет примерно эллиптическую орбиту, так что движение в данном механизме может поддерживаться вращающимся компонентом, как и в XY-поступательных изотропных гармонических осцилляторах. На неподвижном основании 750 закреплены две неподвижные опоры 751. Сверху на опоры 751 наложена горизонтальная балка (в данном варианте прозрачная), к которой прикреплен зажим, фиксирующий конец цилиндрической пружины 756. Нижний конец этой пружины прикреплен посредством зажима к рамке 753, так что рамка может перемещаться по вертикали вдоль двух выполненных на вертикальных опорах 751 канавок 754, в которые введены оси 755 рамки. Цилиндрическая пружина 756 создает линейную восстанавливающую силу, чтобы обеспечить поступательные колебания рамки. В рамке 753 находится спиральная пружина 757, прикрепленная к балансирному колесу 758. Спиральная пружина создает восстанавливающий крутящий момент, действующий на балансирное колесо и заставляющий его совершать изотропные колебания. Частота поступательных колебаний рамки 753 сделана равной частоте угловых колебаний балансирного колеса 758. При малых амплитудах грузы 759 баланса совершают однонаправленный поворот, аппроксимируемый эллипсом. Если x - это вертикальное смещение рамки относительно ее нейтральной точки, а θ - угол поворота балансирного колеса относительно его нейтрального угла, то x и θ соответствуют обобщенным координатам состояния механизма, причем они описывают в пространстве состояний эллипс типа показанного на фиг. 52, но с заменой ϕ на x. Свойства данного осциллятора таковы:

6.3 Упрощенные спусковые механизмы
Преимущество использования спускового механизма состоит в том, что осциллятор не будет непрерывно находиться в контакте (через систему зубчатых колес) с источником энергии, что могло бы быть источником хронометрической погрешности. Следовательно, спусковые механизмы должны быть свободными спусковыми механизмами, позволяющими осциллятору вибрировать без помех со стороны спускового механизма на протяжении значительной доли его колебаний.
Спусковые механизмы являются упрощенными по сравнению со спусковыми механизмами для балансирного колеса, поскольку осциллятор поворачивается в единственном направлении. Поскольку балансирное колесо совершает возвратное движение, спусковые механизмы наручных часы, как правило, требуют наличия рычага, чтобы придавать импульс в одном из двух направлений.
Первый спусковой механизм для часов, полностью пригодный для предлагаемого осциллятора, - это хронометронный, или свободный спусковой механизм (см. [6, 224-233]). Данный спусковой механизм (спуск) может быть использован в варианте с пружинкой или с поворотным элементом без какой-либо модификации, за исключением удаления пружинки, функционирующей при повороте обычного часового балансирного колеса в обратную сторону (см. [6, фиг. 471с]). Например, в показанном на фиг. 4 указанной работы классическом свободном спуске может быть сохранен весь механизм за исключением золотой пружинки I, функция которой больше не нужна.
А. Буасс (Н. Bouasse) описал свободный спуск для конического маятника (см. [3, 247-248]), имеющий сходство с рассматриваемым в данном описании. Однако он считал ошибкой прикладывать дискретный импульс к коническому маятнику. Этот вывод мог быть связан с обсужденным выше предположением, что конический маятник всегда функционирует с постоянной скоростью.
6.4 Усовершенствование свободного спуска для изотропного гармонического осциллятора
Варианты возможных свободных спусков для изотропного гармонического осциллятора показаны на фиг. 36-38.
Фиг. 36 иллюстрирует упрощенный классический часовой свободный спуск для изотропного гармонического осциллятора. Обычный упор для обеспечения возможности обратного движения был удален в связи с однонаправленным вращением осциллятора.
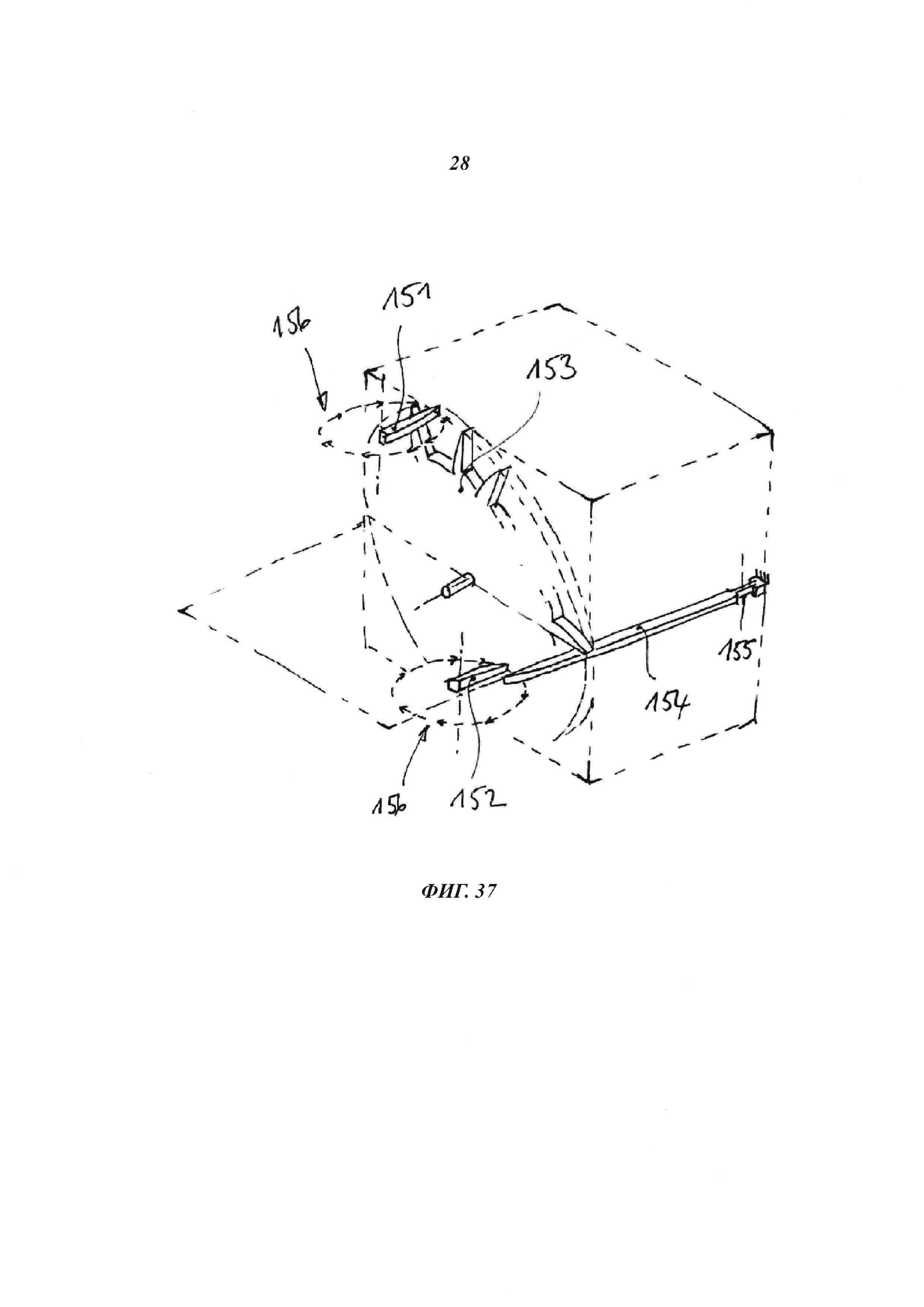
Фиг. 37 иллюстрирует вариант свободного спуска для поступательно движущейся орбитальной массы. Два параллельных зубца 151 и 152 прикреплены к орбитальной массе (не изображена, но схематично обозначена стрелками 156, образующими окружность), так что их траектории соответствуют синхронным поступательным перемещениям. Зубец 152 смещает упор 154, который способен шарнирно поворачиваться на пружине 155, освобождая спускное колесо 153. Спускное колесо сообщает толчок зубцу 151, восстанавливая энергию, потерянную осциллятором.
Фиг. 38 иллюстрирует вариант нового свободного спуска для поступательно перемещающейся орбитальной массы. Два параллельных зубца 161 и 162 прикреплены к орбитальной массе (не изображена), так что их траектории соответствуют синхронным поступательным перемещениям. Зубец 162 смещает упор 164, который способен поворачиваться на пружине 165, освобождая спускное колесо 163. Спускное колесо сообщает толчок зубцу 161, восстанавливая энергию, потерянную осциллятором. Механизм, представленный на фиг. 38 на видах спереди и сверху, позволяет изменять радиус орбиты.
Фиг. 39 иллюстрирует примеры согласованных XY-блоков (ступеней), описанных в ссылках, приведенных в конце описания.
7 Отличие от известных механизмов
7.1 Отличие от конического маятника
Конический маятник - это маятник, вращающийся вокруг вертикальной оси, т.е. оси, параллельной силе тяжести (см. фиг. 4). Теория конического маятника была впервые описана Христианом Гюйгенсом (см. ссылки [16] и [7]), который показал, что, как и обычный маятник, конический маятник не является изохронным, но, в теории, может быть сделан изохронным при использовании гибкой нити и параболоидной конструкции.
Однако, как и циклоидные дуги для обычного маятника, эта предложенная Гюйгенсом модификация, также основанная на гибком маятнике, на практике не повысила точность измерения времени. Конический маятник никогда не был использован в качестве регулятора хода для точных часов.
Несмотря на свой потенциал для точного измерения времени, конический маятник постоянно описывается как средство для получения равномерного движения с целью точного измерения малых временных интервалов (см., например, описание конического маятника в книге [8, р. 534]).
Теоретический анализ конического маятника был проведен в книгах [11], [12, р. 199-201]; был сделан вывод, что его потенциал в качестве регулятора хода в часах в принципе хуже, чем у кругового маятника вследствие принципиального отсутствия изохронизма.
Конический маятник использовался в точных часах, но никогда в качестве регулятора хода. В частности, в 1860-х гг. Вильям Бонд (William Bond) сконструировал точные часы с коническим маятником, который, однако, был частью спускового механизма, тогда как регулятором хода служил круговой маятник (см. ссылки [10] и [25, р. 139-143]).
Предлагаемое изобретение, следовательно, превосходит конический маятник применительно к измерению времени, поскольку предлагаемый осциллятор обладает изохронизмом. Кроме того, изобретение может использоваться в наручных часах или в других портативных приборах для измерения времени, поскольку его основу составляет пружина, что невозможно для конического маятника, который применим только к прибору для измерения времени, имеющему постоянную ориентацию относительно силы тяжести.
7.2 Отличие от механических регуляторов
Регуляторы - это механизмы, которые поддерживают постоянную скорость. Простейшим примером является регулятор Уатта для паровой машины. В 19-м веке эти регуляторы применялись, когда плавное, безостановочное функционирование, в отличие от прерывистого движения часового механизма, основанного на осцилляторе со спусковым механизмом, являлось более важным, чем высокая точность. В частности, такие механизмы требовались для телескопов для отслеживания перемещения звезд, следуя за движением небесной сферы, за относительно короткие интервалы времени. В высокой хронометрической точности в этих случаях не было необходимости в связи с использованием коротких временных интервалов.
Образец такого механизма был построен Антуаном Бреге (см. ссылку [4]), для управления телескопом Парижской обсерватории, а его теория была описана Ивоном Вилларсо (Yvon Villarceau), см. ссылку [24]. Данный механизм был основан на регуляторе Уатта и также предназначался для поддерживания относительно постоянной скорости, так что, хотя он и именовался изохронным регулятором, он не может считаться истинным изохронным осциллятором, подобным описанному выше. Согласно Бреге, суточный ход был между 30 с/сутки и 60 с/сутки (см. ссылку [4]).
В связи с присущими гармоническим осцилляторам особыми свойствами, вытекающими из волнового уравнения (см. Секцию 8), механизмы с постоянной скоростью не являются истинными осцилляторами, и всем таким механизмам присуща ограниченная хронометрическая точность.
Регуляторы использовались в точных часах, но никогда в качестве регулятора хода. В частности, в 1869 г. Уильям Томсон, лорд Кельвин, сконструировал и построил астрономические часы, спусковой механизм которых был основан на механическом регуляторе, тогда как регулятором хода был маятник (см. ссылки [23], [21, р. 133-136], [25, р. 144-149]). Действительно, название его работы, посвященной часам, указывает, что они используют "равномерное движение" (см. ссылку [23]), т.е. явно отличаются в этом отношении от изобретения.
7.3 Отличие от других приборов для измерения времени с непрерывным движением
Было разработано по меньшей мере двое ручных часов с непрерывным движением, механизм которых не прекращает/возобновляет движение, т.е. не страдает от необязательных повторяющихся ускорений. Эти два примера соответствуют наручным часам Salto фирмы Asulab, см. ссылку [2], и Spring Drive фирмы Сейко (Seiko), см. ссылку [22]. В то время как оба эти механизма обеспечивают высокий уровень хронометрической точности, они полностью отличаются от изобретения, поскольку не применяют изотропный осциллятор как регулятор хода, а вместо этого используют колебания кварцевого камертона. При этом данный камертон требует пьезоэлектрических средств, чтобы поддерживать и подсчитывать колебания, и наличия интегральной схемы, чтобы управлять этими процессами. Непрерывное движение возможно только благодаря электромагнитному тормозу, также управляемому интегральной схемой, в памяти которой должен иметься буфер объемом до ±12 с, чтобы корректировать хронометрические погрешности вследствие ударов.
Настоящее изобретение использует в качестве регулятора хода механический осциллятор, так что ему для правильного функционирования не требуется электричества или электроники. Непрерывное движение регулируется самим изотропным осциллятором, а не интегральной схемой.
8 Реализация изотропного гармонического осциллятора
В некоторых рассмотренных вариантах (которые будут также подробно обсуждены далее) изобретение рассматривается как реализация изотропного гармонического осциллятора для использования в качестве регулятора хода. Действительно, чтобы реализовать изотропный гармонический осциллятор как регулятор хода, необходима физическая конструкция, обеспечивающая центральную восстанавливающую силу. Сначала можно отметить, что теория движения массы относительно центральной восстанавливающей силы исходит из того, что результирующее движение лежит в плоскости. Отсюда следует, что, из практических соображений, данная физическая конструкция должна реализовывать планарную изотропию. Следовательно, рассматриваемые далее конструкции будут, в основном, соответствовать планарной изотропии, но не ограничиваться ею, т.е. будет приведен также пример трехмерной изотропии. Планарная изотропия может быть реализована двумя путями: с изотропными пружинами и с поступательными изотропными пружинами.
Вращающиеся изотропные пружины имеют одну степень свободы и вращаются вместе с компонентом, несущим и пружину, и массу. Такая архитектура естественным образом приводит к изотропии. В то время как масса движется по орбите, она вращается вокруг себя с той же угловой скоростью, что и несущий компонент. Это приводит к паразитному моменту инерции (так что масса больше не функционирует как точечная масса, т.е. имеет место отклонение от идеальной модели, описанной в Секции 1.1) и, следовательно, к теоретическому дефекту изохронизма.
Поступательные изотропные пружины имеют две поступательные степени свободы, так что масса не вращается, а поступательно движется по эллиптической орбите вокруг нейтральной точки. Это решает проблему паразитного момента инерции и устраняет теоретическое препятствие для изохронизма.
9 Изотропная пружина согласно изобретению
А.1. Рассмотренная выше вращающаяся площадка 1, на которой закреплена пружина 2 с жесткостью k и с нейтральной точкой в центре вращения площадки, проиллюстрирована на фиг. 8. В предположении о нулевой массе площадки и пружины данный механизм реализует линейную центральную восстанавливающую силу. Однако вследствие физической реальности вращающейся площадки и пружины данной реализации свойственны недостатки: значительные паразитные массы и момент инерции.
А.2. Вращающаяся консольная пружина 3, поддерживаемая внутри рамки 4 и вращающаяся вокруг продольной оси, иллюстрируется на фиг. 9, рассмотренной выше. Этот вариант также реализует центральную линейную восстанавливающую силу и при этом уменьшает паразитный момент инерции благодаря наличию цилиндрической массы и аксиальной пружины. Числовое моделирование показывает, что отклонение от изохронизма остается значительным. Была построена физическая модель (см. фиг. 10), в которой вертикальное движение массы было минимизировано путем прикрепления массы к сдвоенной плоской пружине 504, 505, обеспечивающей приближенно линейное перемещение вместо приближенно кругового перемещения единственной пружины по фиг. 9. Данные, полученные с этой физической моделью, согласуются с аналитической моделью.
Далее указываются, какие теоретические свойства согласно Секции 3 имеют место для этих реализаций, в частности для вращающейся консольной пружины.

Следует отметить, что сила тяжести не влияет на пружину, когда она ориентирована вдоль своей оси. Однако соответствующие варианты изобретения имеют тот недостаток, что и пружина, и несущая ее часть вращаются вокруг их собственных осей, что вводит компоненты паразитного момента инерции, которые ухудшают теоретический изохронизм модели. Действительно, если рассматривать точечную массу m, а также изотропную несущую часть с моментом инерции I и постоянный суммарный угловой момент L, то, при игнорировании трения, уравнения движения принимают вид:
Это уравнение может быть решено в явной форме в терминах эллиптических функций Якоби с выражением периода в терминах эллиптических интегралов первого рода (см. ссылку [17] в отношении определений и аналогичных приложений в механике). Численный анализ этих решений показывает, что, если не минимизирован момент инерции I, отклонение от изохронизма является значительным.
10 Поступательные изотропные пружины: предшествующий уровень
В этой секции будет рассмотрен предшествующий уровень, отталкиваясь от которого авторы разработали принципиально новое изобретение: изотропную пружину. Далее, если не оговорено иное, термин "изотропная пружина" будет соответствовать "планарной поступательной изотропной пружине".
10.1 Изотропные пружины: уровень технологии
Изобретение основано на использовании согласованных XY-ступеней (см. ссылки [26, 27, 29, 30] и фиг. 39, иллюстрирующую примеры архитектур, рассмотренных в этих ссылках). Согласованные XY-ступени - это механизм с двумя степенями свободы, каждая из которых соответствует поступательным перемещениям. Поскольку эти механизмы содержат согласованные шарниры (см. ссылку [28]), они обеспечивают пленарные восстанавливающие силы, так что их можно рассматривать как планарные пружины.
В книге [14, р. 166, 168] предлагаются две XY-ступени, которые обладают планарной изотропией. Первая ступень, проиллюстрированная на фиг. 11, содержит два последовательных согласованных механизма с четырьмя стержнями 5 (именуемыми также сочленениями с параллельными рычагами), обеспечивающие для малых смещений поступательные перемещения в направлениях X и Y. Вторая ступень, проиллюстрированная на фиг. 12, содержит 4 параллельных стержня 6, связанных с 8 сферическими шарнирами 7, и центральный сильфон 8, соединяющий подвижную платформу 9 с основанием. Такой же результат может быть получен с тремя параллельными стержнями, связанными с 8 сферическими шарнирами, и с центральным сильфоном, соединяющим подвижную платформу с основанием.
10.2 Изотропные пружины: простейший вариант изобретения и описание концепции
Изотропные пружины соответствуют одному объекту изобретения, причем наиболее подходящими для обеспечения теоретических характеристик гармонического осциллятора представляются механизмы, у которых центральная сила реализована посредством изотропной пружины (в этом случае термин "изотропная" также означает "одинаковая во всех направлениях").
Базовая концепция, реализуемая во всех вариантах изобретения, состоит в комбинировании в одной плоскости двух ортогональных пружин, которые в идеале являются независимыми одна от другой. Как будет показано в этой секции, в результате будет получена планарная изотропная пружина.
Как было описано выше, простейший вариант представлен на фиг. 16. В этом варианте две пружины Sx 12 и Sy 11 с жесткостью k установлены так, что пружина Sx 12 действует вдоль горизонтальной оси x, а пружина Sy 11 - вдоль вертикальной оси y.
К обеим этим пружинам прикреплена масса m 10. При этом геометрия выбрана такой, что в точке (0, 0) обе пружины находятся в своем нейтральном положении.
Можно показать, что этот механизм демонстрирует изотропию первого порядка, как это иллюстрируется на фиг. 17. При наличии малого смещения dr=(dx,dy) восстанавливающая сила Fx в направлении х равна, с точностью до первого порядка, -kdx, а восстанавливающая сила Fy в направлении у равна -kdy. Тогда полная восстанавливающая сила составит:
F(dr)=(-kdx, -kdy)=-kdr,
что соответствует центральной линейной восстанавливающей силе согласно Секции 2. Отсюда следует, что этот механизм с точностью до первого порядка обеспечивает, как было предсказано выше, реализацию центральной линейной восстанавливающей силы.
В данных реализациях сила тяжести влияет на пружины во всех направлениях, поскольку она изменяет эффективную постоянную пружины. Однако пружины не вращаются вокруг своих осей, минимизируя паразитные моменты инерции, а центральная сила реализована непосредственно самой пружиной. Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этих реализаций (с точностью до первого порядка).

Поскольку прибор для измерения времени должен быть очень точным, с относительной погрешностью 1/10000 для получения абсолютной погрешности 10 с/сутки, изотропная пружина также должна быть весьма прецизионной. Соответственно, варианты изобретения направлены на обеспечение этого свойства.
Поскольку изобретение достаточно точно моделирует изотропную пружину и минимизирует дефект изотропии, орбиты массы, обеспечиваемые изобретением, будут точно моделировать изохронные эллиптические орбиты с нейтральной точкой в центре эллипса. Базовой иллюстрацией принципа изобретения является фиг. 18А (подробное описание которой было приведено выше).
Принцип, рассматриваемый далее со ссылками на фиг. 40-47, может быть применен к блокам (ступеням) 131-134, представленным на фиг. 30-35 и описанным выше в качестве возможных вариантов подобных блоков.
10.3 Ортогональные некомпенсированные параллельные пружинные блоки, расположенные в одной плоскости.
Развитием идеи комбинирования двух пружин является, как это показано на фиг. 40, замена линейных пружин параллельными пружинами 171, 172, образующими пружинный блок 173, несущий орбитальную массу 179. Чтобы получить планарную изотропную пружину с двумя степенями свободы, два параллельных пружинных блока 173, 174 (типа показанного на фиг. 40), каждый из которых содержит параллельные пружины 171, 172 и 175, 176 соответственно, расположены ортогонально (см. фиг. 19 и 41).
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этих вариантов.

Эта модель имеет две степени свободы в отличие от модели, описанной в Секции 11.2, которая имеет шесть степеней свободы. Следовательно, эта модель является истинно планарной, как это требуется для теоретической модели согласно Секции 2. При этом данная модель нечувствительна к силе тяжести при условии ортогональности ее плоскости этой силе.
Выше была дана подробная оценка дефекта изотропии в этом механизме, и эта оценка будет использована для сравнения с механизмом с компенсированным дефектом изотропии.
11 Вариант, минимизирующий дефект изотропии m, но не k
Присутствие промежуточных ступеней (блоков) приводит к приведенным массам, различным для различных направлений. Следовательно, идеальная математическая модель Секции 2 больше неприменима, т.е. присутствует теоретический дефект изохронизма. Представленное на фиг. 42 изобретение согласно этой секции минимизирует данное отличие. Более конкретно, изобретение минимизирует отклонение массы от изотропии путем взаимного наложения двух идентичных в плоскости, но ортогональных параллельных пружинных блоков по фиг. 41, которые взаимно развернуты (вокруг оси z) на 90°.
Показанная на фиг. 42 первая пластина 181 наложена сверху на вторую пластину 182. Блоки 183 и 184 первой пластины 181 прикреплены соответственно к блокам 185 и 186 второй пластины 182. На двух верхних видах изображенные серыми блоки 184, 187 первой пластины и блок 186 второй пластины 182 имеют смещение в направлении y, соответствующем y-компоненту смещения орбитальной массы 189, тогда как изображенные черными блоки 183 первой пластины 181 и блоки 185, 188 второй пластины 182 остаются неподвижными. На нижних видах изображенные серыми блоки 184, 187 первой пластины 181 и блок 186 второй пластины 182 имеют смещение в направлении x, соответствующем x-компоненту смещения орбитальной массы 189, тогда как изображенные черными блоки 183, 185, 188 первой и второй пластин 181, 182 остаются неподвижными. Поскольку первая и вторая пластины 181, 182 идентичны, суммарная масса блоков 184, 187 и 186 равна суммарной массе блоков 184, 188 и 186. Следовательно, суммарная мобильная масса (серые блоки 184, 186, 187) ведет себя одинаково при смещениях в направлениях x и y, как и в любом другом направлении в плоскости.
Как следствие такой конструкции, приведенная масса идентична для направлений x u y и, следовательно, является одинаковой в любом направлении в плоскости. Таким образом, в теории обеспечивается минимизация дефекта изотропии приведенной массы.
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этих вариантов.

12 Вариант, минимизирующий дефект изотропии k, но не m
Цель разработки такого механизма состоит в обеспечении изотропности жесткой пружины. Дефект изотропии, т.е. отклонения от идеальной изотропии жесткости пружины, будет, согласно изобретению, минимизирован. Предлагаемые изобретения направлены на повышение сложности в отношении компенсации факторов, приводящих к дефектам изотропии. Будут рассмотрены
- лежащие в плоскости компенсированные ортогональные параллельные пружинные блоки;
- не лежащие в плоскости компенсированные ортогональные параллельные пружинные блоки.
12.1 Вариант с ортогональными компенсированными параллельными пружинными блоками, лежащими в плоскости
Этот вариант показан на фиг. 43 и (на виде сверху) на фиг. 44. Использование составных параллельных пружинных блоков вместо простых параллельных пружинных блоков приводит к прямолинейному движению в каждом блоке. Таким образом, подавлены эффекты, приводящие к дефектам изотропии.
Более конкретно, фиг. 43 и 44 иллюстрируют вариант с ортогональными компенсированными параллельными пружинными блоками согласно изобретению, лежащими в плоскости. Неподвижное основание 191 несет первую пару параллельных плоских пружин 192, связанных с первым промежуточным блоком 193. Вторая пара плоских пружин 194 (параллельных пружинам 192) связана со вторым промежуточным блоком 195. Промежуточный блок 195 несет третью пару параллельных плоских пружин 196 (ортогональных пружинам 192 и 194), связанных с третьим промежуточным блоком 197. Промежуточный блок 197 несет параллельные плоские пружины 198 (параллельные пружинам 196), которые связаны с орбитальной массой 199 или, альтернативно, с рамкой, несущей орбитальную массу 199.
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этого варианта.

12.2 Альтернативный вариант с ортогональными компенсированными параллельными пружинными блоками, лежащими в плоскости
Вариант, альтернативный рассмотренному варианту с ортогональными параллельными пружинными блоками, лежащими в плоскости, представлен на фиг. 45.
Вместо последовательности параллельных плоских пружин 192, 194, 196, 198 согласно фиг. 43, используется последовательность пружин 192, 196, 194, 198.
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этого варианта.

12.3 Компенсированная изотропная планарная пружина: сравнение дефектов изотропии
В конкретном расчетном примере механизма с ортогональными некомпенсированными параллельными пружинными блоками, лежащими в плоскости, дефект изотропии в худшем случае составляет 6,301%, тогда как для компенсированного механизма этот дефект в худшем случае составляет 0,027%. Следовательно, компенсированный механизм улучшает худший случай дефекта изотропии жесткости в 200 раз.
В общем случае оценка зависит от конкретной конструкции, но приведенные данные показывают, что возможно улучшение на два порядка.
13 Вариант, минимизирующий дефект изотропии k и m
Присутствие промежуточных блоков приводит к тому, что приведенные массы будут различными для различных углов. Следовательно, идеальная математическая модель согласно Секции 2 больше не применима, т.е. возникает теоретический дефект изохронизма. Представленное на фиг. 46 изобретение, соответствующее этой секции, минимизирует данное отклонение. Изобретение минимизирует изотропию приведенной массы путем взаимного наложения двух идентичных компенсированных в плоскости ортогональных параллельных пружинных блоков, взаимно развернутых (вокруг оси z) на 90°.
Соответственно, на фиг. 46 представлен вариант, минимизирующий дефект изотропии приведенной массы.
Первая пластина 201 наложена сверху на вторую пластину 202. Другие обозначения аналогичны использованным на фиг. 43. Блоки 191 и 199 первой пластины 201 прикреплены соответственно к блокам 191 и 199 второй пластины 202. На двух верхних видах изображенные серыми блоки 197, 199 первой пластины 201 и блоки 193, 195, 197, 199 второй пластины 202 имеют смещение в направлении x, соответствующем x-компоненту смещения орбитальной массы, тогда как изображенные черными блоки 191, 193, 195 первой пластины 201 и 191 второй пластины 202 остаются неподвижными. На нижних видах изображенные серыми блоки 193, 195, 197, 199 первой пластин 201 и 199 второй пластины 202 имеют смещение в направлении y, соответствующем y-компоненту смещения орбитальной массы, тогда как изображенные черными блок 191 первой пластины 201 и 191, 193, 195 второй пластин 202 остаются неподвижными.
Как следствие такой конструкции, приведенная масса идентична для направлений x u y и, следовательно, является одинаковой в любом направлении в плоскости. Таким образом, в теории обеспечивается минимизация дефекта изотропии приведенной массы.
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этого варианта.

13.1 Вариант с ортогональными компенсированными изотропными пружинами, не лежащими в одной плоскости
Вариант с не лежащими в одной плоскости ортогональными компенсированными изотропными пружинами представлен на фиг. 47.
Неподвижное основание 301 несет первую пару параллельных плоских пружин 302, связанных с первым промежуточным блоком 303. Вторая пара плоских пружин 304 (параллельных пружинам 302) связана со вторым промежуточным блоком 305. Промежуточный блок 305 несет третью пару параллельных плоских пружин 306 (ортогональных пружинам 302 и 304), связанных с третьим промежуточным блоком 307. Промежуточный блок 307 несет параллельные плоские пружины 308 (параллельные пружинам 306), которые связаны с орбитальной массой 309 (или, альтернативно, с рамкой, несущей орбитальную массу 309).
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этого варианта.

13.2 Уменьшение дефекта изотропии путем копирования или наложения параллельно или последовательно
Дефект изотропии может быть уменьшен путем получения копии изотропной пружины и наложения ее на верхний конец пружины-оригинала с точно подобранным углом разворота.
Фиг. 55 иллюстрирует сборку из двух взаимно параллельных идентичных XY-осцилляторов с параллельными пружинами, направленную на улучшение изотропии жесткости. Первый из указанных осцилляторов (на фиг. 55 это верхняя ступень) содержит неподвижную наружную рамку 830, первую пару параллельных плоских пружин 831 и 832, промежуточный блок 833, вторую пару параллельных плоских пружин 834 и 835 и подвижный блок 838, на котором должна быть жестко зафиксирована орбитальная масса (не изображена). Второй из указанных осцилляторов (на фиг. 55 это нижняя ступень) идентичен первому. Обе ступени связаны между собой путем жесткого прикрепления рамки 830 к рамке 841 и элемента 836 к элементу 842. Вторая XY-ступень параллельных пружин развернута относительно первой ступени вокруг оси Z на 180° (на фиг. 55 видно, что метка А на рамке 830 противолежит метке А на рамке 841). Поскольку дефект изотропии одиночной ступени является периодическим, формирование стопы из двух параллельных ступеней при правильном взаимном развороте (в данном случае на 180°) приводит к противофазному подавлению указанного дефекта. Чтобы слегка отделить ступени друг от друга и, тем самым, устранить трение между их подвижными частями, использованы прокладка 840 и рамка 839. Дефект изотропии жесткости у сборки в целом значительно меньше (в типичном случае в 2-20 раз), чем у одиночной составной XY-ступени параллельных пружин. Изотропия жесткости может быть дополнительно улучшена формированием стопы из более чем двух ступеней, взаимно развернутых на углы, меньшие 180°. Можно также инвертировать механизм, т.е. прикрепить компоненты 838, 840 и 842 к неподвижному основанию и установить орбитальную массу на наружные рамки 830, 839 и 841. Функционирование механизма при этом не изменится. Его свойства таковы:

Фиг. 56 иллюстрирует сборку из двух взаимно параллельных идентичных составных XY-осцилляторов с параллельными пружинами, направленную на улучшение изотропии жесткости. Первый из указанных осцилляторов (на фиг. 56 это верхняя часть) содержит неподвижную наружную рамку 850, связанную с подвижным блоком 851 посредством двух установленных последовательно перпендикулярных составных параллельных пружинных ступеней. Орбитальная масса (не изображена) должна быть жестко зафиксирована на подвижном блоке 851. Второй из указанных осцилляторов (на фиг. 56 это нижняя часть) идентичен первому. Он содержит неподвижную наружную рамку 852, связанную с подвижным жестким блоком 853 посредством двух установленных последовательно перпендикулярных составных параллельных пружинных ступеней. Обе ступени связаны между собой путем жесткого прикрепления рамки 850 к рамке 852 и подвижного блока 851 к подвижному блоку 853. Вторая ступень развернута относительно первой ступени вокруг оси Z на 45° (как это проиллюстрировано на фиг. 56 разворотом метки А на рамке 852 на 45° относительно метки А на рамке 850). Поскольку дефект изотропии одиночной ступени является периодическим, формирование стопы из двух параллельных ступеней при правильном взаимном развороте (в данном случае на 45°) приводит к противофазному подавлению указанного дефекта. Чтобы слегка отделить ступени друг от друга и, тем самым, устранить трение между их подвижными частями, использованы прокладка 854 и рамка 855. Дефект изотропии жесткости у сборки в целом значительно меньше (в типичном случае в 100-500 раз), чем у одиночной составной XY-ступени параллельных пружин. Замечание 1: Изотропия жесткости может быть дополнительно улучшена формированием стопы из более чем двух ступеней, взаимно развернутых на углы, меньшие 45°. Замечание 2: Можно также инвертировать механизм, т.е. прикрепить компоненты 851, 853 и 854 к неподвижному основанию и установить орбитальную массу на наружные рамки 850, 852 и 855. Функционирование механизма при этом не изменится. Его свойства таковы:

В типичном случае варианты, представленные на фиг. 55 и 56, применимы к конструкциям и вариантам, описанным выше и проиллюстрированным фиг. 30-35 и 40-46, которые содержат аналогичные ступени (блоки). Применительно к этим вариантам могут также формироваться стопы, содержащие несколько (два или более) блоков путем укладывания их друг на друга, причем каждый блок должен быть развернут относительно соседнего блока, в соответствии с описанным принципом, на угол, равный, например, 45°, 90°, 180° или другому значению, или комбинации этих значений. Такое сочетание блоков, ориентированных под различными углами, позволяет уменьшить или даже полностью устранить дефект изотропии осциллятора.
Фиг. 62 иллюстрирует сборку из двух последовательно установленных идентичных XY-осцилляторов с параллельными пружинами, направленную на улучшение изотропии жесткости. Первый из указанных осцилляторов (на фиг. 62 это нижняя ступень 978) содержит неподвижную наружную рамку 970, первую пару параллельных плоских пружин 971, промежуточный блок 972, вторую пару параллельных плоских пружин 973 и подвижный блок 974, на котором жестко зафиксирована вторая XY-ступень параллельных пружин (на фиг. 62 это верхняя ступень), идентичная первой ступени. Обе ступени связаны между собой путем жесткого прикрепления подвижных блоков 976, 974 друг к другу через прокладку 975, создающую небольшой зазор между двумя блоками. Вторая ступень развернута относительно первой ступени вокруг оси Z на 180° (на фиг. 62 показано, что метка А на рамке 970 противолежит метке А на рамке 979). Подвижной массой осциллятора является блок 977 (он изготовлен из плотного материала, тогда как все другие подвижные блоки изготовлены из материала с низкой плотностью). Поскольку дефект изотропии одиночной ступени является периодическим, формирование стопы из двух последовательных ступеней при правильном взаимном развороте (в этом случае на 180°) приводит к противофазному подавлению указанного дефекта. Дефект изотропии жесткости у сборки в целом значительно меньше (в типичном случае в 2-20 раз), чем у одиночной XY-ступени параллельных пружин. Жесткость изотропии может быть дополнительно улучшена формированием стопы из более чем двух ступеней, взаимно развернутых на углы, меньшие 180°. Свойства механизма таковы:

Фиг. 63 иллюстрирует сборку из двух последовательно установленных идентичных составных XY-осцилляторов с параллельными пружинами, направленную на улучшение изотропии жесткости. Первый из указанных осцилляторов (на фиг. 63 это нижняя ступень) содержит неподвижную наружную рамку 980 и подвижный блок 981, на котором жестко зафиксирована вторая составная XY-ступень параллельных пружин (на фиг. 63 это верхняя ступень), идентичная первой ступени. Обе ступени связаны между собой путем жесткого прикрепления подвижных блоков 981, 983 друг к другу через прокладку 982, создающую небольшой зазор между двумя ступенями. Вторая ступень развернута относительно первой ступени вокруг оси Z на 45° (на фиг. 63 показано, что метка А на рамке 984 смещена относительно метки на рамке 980). Подвижной массой осциллятора является рамка 984 (она изготовлена из плотного материала, тогда как все другие подвижные детали изготовлены из материала с низкой плотностью). Поскольку дефект изотропии одиночной ступени является периодическим, формирование стопы из двух последовательных ступеней при правильном взаимном развороте (в этом случае на 45°) приводит к противофазному подавлению указанного дефекта. Дефект изотропии жесткости всей сборки значительно меньше (в типичном случае в 100-500 раз), чем у одиночной XY-ступени параллельных пружин. Жесткость изотропии может быть дополнительно улучшена формированием стопы из более чем двух ступеней, взаимно развернутых на углы, меньшие 45°. Свойства механизма таковы:

14 Компенсация силы тяжести и удара
Чтобы новый осциллятор можно было установить в портативный прибор для измерения времени, необходимо принять во внимание силы, которые могут влиять на правильное функционирование осциллятора. Эти силы включают силу тяжести и удары.
14.1 Компенсация силы тяжести
Первый способ решения проблемы силы тяжести состоит в использовании планарной изотропной пружины, которая, находясь в горизонтальном положении, нечувствительна (как это было описано выше) к воздействию силы тяжести.
Однако это решение адекватно только для стационарных часов. В портативном приборе для измерения времени необходима компенсация. Она может быть обеспечена изготовлением копии осциллятора и соединением обеих копий посредством шарового или универсального шарнира, как это было описано со ссылками на фиг. 20-24. В реализации по фиг. 20 центр силы тяжести всего механизма остается фиксированным. Целесообразно использовать именно такой осциллятор.
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этого варианта

14.2 Динамическая балансировка линейного ускорения
Линейные удары - это форма линейного ускорения, т.е. они включают силу тяжести как специальный случай. Следовательно, механизм по фиг. 20 компенсирует также линейные удары (как это описано выше).
14.3 Динамическая балансировка углового ускорения
Эффекты, обусловленные угловыми ускорениями, могут быть минимизированы за счет уменьшения расстояния между центрами силы тяжести двух масс (как это показано на фиг. 21) путем модифицирования механизма, описанного в предыдущей секции и показанного на фиг. 20. Точная настройка расстояния "I" (см. фиг. 21), разделяющего два центра силы тяжести, позволяет добиться полной компенсации угловых ударов, включая учет момента инерции самой тяги. Другой вариант показан на фиг. 49А и 49В, где два XY-осциллятора связаны через узел, аналогичный так называемому узлу шатуна со звездочками и кареткой в велосипеде, и придающий импульсы каждому XY-осциллятору на радиусах, которые могут быть различными. Более конкретно, фиг. 49А и 49В иллюстрируют динамически сбалансированный двойной осциллятор с угловой связью. Орбитальные массы 643 и 644 двух пленарных осцилляторов связаны посредством узла, содержащего верхнюю кулису 646, нижнюю кулису 645 и их вал 647 (аналогичный каретке велосипеда). Кулиса 646 имеет прорезь, позволяющую скользить в ней пальцу, жестко прикрепленному к массе 643. Аналогично, масса 644 жестко прикреплена к пальцу, скользящему в прорези кулисы 645. Вал 647 приводится во вращение зубчатым колесом 648, которое приводится в действие зубчатым колесом 649, приводимым в действие зубчатым колесом 650. Такое устройство вынуждает массы 643 и 644 совершать орбитальное движение с взаимным смещением на 180° (со связью по углу). Радиальные положения двух масс независимы (нет связи по радиусу). Система в целом ведет себя, как осциллятор с тремя степенями свободы. Неподвижные рамки 641 и 642 верхнего и нижнего осцилляторов прикреплены к общей неподвижной рамке 640. Свойства этого варианта таковы:

Еще один вариант представлен на фиг. 50А и 50В, где два XY-осциллятора связаны через шаровой шарнир, так что радиусы и амплитуды для каждого XY-осциллятора одинаковы. Более конкретно, фиг. 50А и 50В иллюстрируют динамически сбалансированный двойной осциллятор на базе двух пленарных осцилляторов, связанных по углу и радиусу. Орбитальные массы 653 и 655 двух пленарных осцилляторов 654 и 652 связаны посредством соединительного стержня 656, соединенного с неподвижной рамкой 651 шаровым шарниром 657. Две конце стержня 656 могут скользить в осевом направлении в двух сферах 658, 659, образующих чести шарового шарнире, относительно месс 655 и 653 соответственно. Эта кинематическая схеме обеспечивает взаимную связь двух осцилляторов по углу и радиусу. Таким образом, система в целом функционирует, как осциллятор с двумя степенями свободы. Неподвижные рамки верхнего и нижнего осцилляторов 654 и 652 прикреплены к общей неподвижной рамке 651. Свойстве механизме таковы:

Еще один вариант представлен на фиг. 57. Динамическая балансировке обеспечивается здесь посредством рычагов с гибкими опорами при соотношениях длин плеч, обеспечивающих устранение нежелательной силы. Более конкретно, фиг. 57 иллюстрирует динамически сбалансированный изотропный гармонический осциллятор. Орбитальная мессе 867 (М) установлена не рамку 866. Рамка 866 прикреплена к неподвижному основанию 860 посредством двух параллельных пружинных блоков (ступеней), установленных последовательно с разворотом на 90°: Блок 861, 862 обеспечивает степень свободы в направлении Y, а блок 864, 865 - в направлении X. Имеется также промежуточный подвижный блок 863. Кроме того, компонент 866 соединен с компенсирующей массой 871 (m) по X, движущейся в противоположном направлении для всех движений массы 867 в направлении X, тогда как компенсирующая масса 876 по Y движется в противоположном направлении для всех движений массы 867 в направлении Y. Инверсионный механизм основан на плоской пружине 869, соединяющей главную массу 867 с жестким рычагом 870. Рычаг поворачивается относительно неподвижного основания благодаря наличию гибкого шарнира, содержащего две плоские пружины 872 и 873. Компенсирующая масса 871 по X установлена на противоположном конце рычага. Длины плеч OA, OB рычага выбраны так, чтобы обеспечить отношение ОА/ОВ=m/М. В результате линейное ускорение в плоскости XY не создает крутящего момента в шарнире О. Идентичный механизм 874-878 использован для динамического балансирования главной массы 867 в отношении ускорения в направлении Y. Таким образом, механизм в целом является эффективно нечувствительным к линейным ускорениям в диапазоне малых деформаций. Жесткий палец 868, прикрепленный к массе 867, взаимодействует с кулисой (не изображена), поддерживая орбитальное движение. Замечание: все части, кроме масс 867, 871 и 876, выполнены из материала низкой плотности, например из алюминиевого сплава или из силикона.
Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этого варианта

16 Трехмерная поступательная изотропная пружина по изобретению
Трехмерная поступательная изотропная пружина согласно изобретению представлена на фиг. 48.
Три перпендикулярных сильфона 403 соединяют поступательно перемещающуюся орбитальную массу 402 с неподвижным основанием 401. Как следует из Секции 10.2 (см. фиг. 17), этот механизм демонстрирует трехмерную изотропию первого порядка. В отличие от двухмерной конструкции по фиг. 16-18, сильфоны 403 обеспечивают соединение с тремя поступательными степенями свободы, что делает этот реалистичный работающий механизм нечувствительным к внешнему крутящему моменту. Свойства механизма таковы:

17 Применение в акселерометрах, хронографах и регуляторах
При добавлении к описанным вариантам изотропной пружины радиального дисплея изобретение позволяет получить полностью механический акселерометр с двумя степенями свободы, пригодный, например, для измерения поперечных нагрузок в пассажирском автотранспорте.
В других приложениях описанные осцилляторы и системы могут быть использованы в качестве регулятора для хронографа, измеряющего доли секунды и требующего дополнительно только мультипликативной системы зубчатых колес с расширенным диапазоном скоростей, например, для достижения частоты 100 Гц, чтобы измерять интервалы порядка 1/100 секунды. Разумеется, возможны и другие измеряемые временные интервалы, так что передаточное отношение системы зубчатых колес может быть подобрано соответствующим образом.
В другом приложении описанный осциллятор может быть использован как регулятор скорости, когда нужно обеспечить только постоянную среднюю скорость в пределах малых интервалов, например, чтобы регулировать часы с боем, музыкальные или наручные часы, а также музыкальные шкатулки. Применение гармонического осциллятора, в отличие от фрикционного регулятора, обеспечивает минимизацию трения и оптимизацию фактора качества, что дает минимизацию нежелательного шума, снижение энергопотребления и, следовательно, сохранение энергии. В часах с боем или в музыкальных часах это приводит к улучшению стабильности музыкального ритма или боя.
Рассмотренные варианты были приведены только в иллюстративных целях и не должны рассматриваться как вносящие какие-либо ограничения. В рамках изобретения возможны и многие другие варианты, например использующие эквивалентные средства. Кроме того, различные варианты могут комбинироваться желательным образом, с учетом конкретных обстоятельств.
Далее, для осциллятора могут быть найдены и другие приложения, не выходящие за границы изобретения, которое не ограничено несколькими описанными приложениями.
Главные свойства и преимущества некоторых вариантов изобретения
А.1. Механическая реализация изотропного гармонического осциллятора.
А.2. Применение изотропных пружин, соответствующих физической реализации планарной центральной линейной восстанавливающей силы (закона Гука).
А.3. Прецизионный прибор для измерения времени благодаря использованию гармонического осциллятора в качестве регулятора хода.
А.4. Прибор для измерения времени без спускового механизма, т.е. с повышенной эффективностью и уменьшенной механической сложностью.
А.5. Механический прибор для измерения времени с непрерывным движением, обеспечивающий повышенную эффективность благодаря устранению прерывистого движения компонентов и обусловленных этим нежелательных ударов и эффектов торможения, а также повторяющихся ускорений элементов передач и спусковых механизмов.
А.6. Компенсация силы тяжести.
А.7. Динамическая балансировка линейных ударов.
А.8. Динамическая балансировка угловых ударов.
А.9. Повышенная хронометрическая точность благодаря использованию свободного спуска, который освобождает осциллятор от всех механических возмущений на отрезке его колебаний.
А.10. Новое семейство спусковых механизмов, более простых по сравнению со спусковыми механизмами на основе балансирного колеса, поскольку осциллятор вращается в неизменном направлении.
А.11. Усовершенствование классического свободного спуска для изотропного осциллятора.
Инновации в некоторых вариантах
B.1. Изотропный гармонический осциллятор впервые применен как регулятор хода в приборе для измерения времени.
B.2. Исключение спускового механизма из прибора для измерения времени с гармоническим осциллятором в качестве регулятора хода.
B.3. Новый механизм, компенсирующий силу тяжести.
B.4. Новые механизмы для динамической балансировки применительно к линейным и угловым ударам.
B.5. Новые упрощенные спусковые механизмы.
Суммирование свойств и применений изотропных гармонических осцилляторов согласно изобретению (изотропных пружин)
Примеры свойств
1. Изотропный гармонический осциллятор, минимизирующий дефект изотропии жесткости пружины.
2. Изотропный гармонический осциллятор, минимизирующий дефект изотропии приведенной массы.
3. Изотропный гармонический осциллятор, минимизирующий дефекты изотропии жесткости пружины и приведенной массы.
4. Изотропный осциллятор, минимизирующий дефекты изотропии жесткости пружины и приведенной массы и нечувствительный к линейному ускорению во всех направлениях, в частности нечувствительный к силе тяжести для всех ориентации механизма.
5. Изотропный гармонический осциллятор, нечувствительный к угловым ускорениям.
6. Изотропный гармонический осциллятор, сочетающий все перечисленные свойства, т.е. минимизирующий дефекты изотропии жесткости пружины и приведенной массы и нечувствительный к линейным и угловым ускорениям.
Применения изобретения
А.1. Изобретение является физической реализацией центральной линейной восстанавливающей силы (закона Гука).
А.2. Изобретение обеспечивает физическую реализацию изотропного гармонического осциллятора как регулятора хода в приборе для измерения времени.
А.3. Изобретение минимизирует отклонение от планарной изотропии.
А.4. Обеспечиваемые изобретением свободные колебания являются хорошей аппроксимацией эллиптических орбит с нейтральной точкой пружины, являющейся центром эллипса.
А.5. Обеспечиваемые изобретением свободные колебания имеют высокую степень изохронизма: период осцилляции в высокой степени независим от общей энергии (амплитуды).
А.6. Изобретение легко согласуется с механизмом передачи внешней энергии, служащей для поддержания общей энергии колебаний относительно постоянной в течение длительных периодов времени.
А.7. Механизм может быть модифицирован, чтобы обеспечить трехмерную изотропию.
Свойства
N.1. Изотропный гармонический осциллятор с высокой жесткостью пружины, с изотропией приведенной массы при ее нечувствительности к линейным и угловым ускорениям.
N.2. Отклонение от идеальной изотропии по меньшей мере на порядок, обычно на два порядка, меньше, чем в известных механизмах.
N.3. Отклонение от идеальной изотропии впервые достаточно мало для того, чтобы изобретение могло использоваться как часть регулятора хода в точном приборе для измерения времени.
N.4. Изобретение является первой реализацией гармонического осциллятора, не требующего применения спускового механизма с прерывистым движением для снабжения энергией с целью поддержания колебаний при постоянном уровне энергии.
Источники (содержание которых полностью включено в данное описание посредством ссылки)
[1] Joseph Bertrand, Theoreme relatifau mouvement d'un point attire vers un centre fixe, C.R. Acad. Sci. 77 (1873), 849-853.
[2] Jean-Jacques Born, Rudolf Dinger,




[3] H. Bouasse, Pendule Spiral Diapason II, Librairie Delagrave, Paris 1920.
[4] Antoine Breguet, Regulateur isochrone de M. Yvon Villarceau, La Nature 1876 (premier semestre), 187-190.
[5]


[6] George Daniels, Watchmaking, Updated 2011 Edition, Philip Wilson, London 2011.
[7] Leopold Defossez, Les savants du XVIIeme siecle et la mesure du temps, Edition du Journal Suisse d'Horlogerie, Lausanne 1946.
[8] Leopold Defossez, Theorie Generate de I'Horlogerie, Tome Premier, La Chambre suisse d'horlogerie, La Chaux-de-Fonds 1950.
[9] Rupert T. Gould, The Marine Chronometer, Second Edition, The Antique Collector's Club, Woodbrige, England, 2013.
[10] R.J. Griffiths, William Bond astronomical regulator No. 395, Antiquarian Horology 17 (1987), 137-144.
[11] Jules Haag, Sur le pendule conique, Comptes Rendus de

[12] Jules Haag, Les mouvements vibratoires, Tome second, Presses Universitaires de France, 1955.
[13] K. Josic and R.W. Hall, Planetary Motion and the Duality of Force Laws, SIAM Review 42 (2000), 114-125.
[14] Simon Henein, Conception des guidages flexibles, Presses Polytechniques et Universitaires Romandes, Lausanne 2004.
[16] Christiaan Huygens, Horologium Oscillatorium, Latin with English translation by Ian Bruce, www.17centurymaths.com/contents/huygenscontents.htrnl.
[17] Derek F. Lawden, Elliptic Functions and Applications, Springer Verlag, New York 2010.
[18] J.C. Maxwell, On Governors, Bulletin of the Royal Society 100 (1868), 270-83. en.wikipedia.org/wiki/File:On_Governors.pdf.
[19] Isaac Newton, The Mathematical Principles of Natural Philosophy, Volume 1, Translated by Andrew Motte 1729, Google eBook, retrieved January 10, 2014.
[20] Niaudet-Breguet, "Application du diapason 'a I'horlogerie".



[21] Derek Roberts, Precision Pendulum Clocks, Schiffer Publishing Ltd., Atglen, PA, 2003.
[22] Seiko Spring Drive official website, www.seikospringdrive.com, retrieved January 10, 2014.
[23] William Thomson, On a new astronomical clock, and a pendulum governor for uniform motion, Proceedings of the Royal Society 17 (1869), 468-470.
[24] Yvon Villarceau, Sur les



[25] Philip Woodward, My Own Right Time, Oxford University Press 1995.
[26] Awtar, S., Synthesis and analysis of parallel kinematic XY flexure mechanisms. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, 2006.
[27] M. Dinesh, G.K. Ananthasuresh, Micro-mechanical stages with enhanced range, International Journal of Advances in Engineering Sciences and Applied Mathematics, 2010. [28] L.L. Howell, Compliant Mechanisms, Wiley, 2001.
[29] Yangmin Li, and Qingsong Xu, Design of a New Decoupled XY Flexure Parallel Kinematic Manipulator with Actuator Isolation, IEEE 2008.
[30] Yangmin Li, Jiming Huang, and Hui Tang, A Compliant Parallel XY Micromotion Stage With Complete Kinematic Decoupling, IEEE, 2012.
Реферат
Механический изотропный гармонический осциллятор содержит соединение по меньшей мере с двумя степенями свободы, поддерживающее массу, совершающую орбитальное движение относительно неподвижного основания, посредством пружин, обладающих изотропностью и обеспечивающих линейную восстанавливающую силу. Осциллятор может использоваться в приборе для измерения времени, например в наручных часах. 7 н. и 22 з.п. ф-лы, 63 ил.
Комментарии