Механизм резонатора часов - RU2729625C2
Код документа: RU2729625C2
Чертежи



Описание
Область техники, к которой относится изобретение
Изобретение относится к механизму резонатора часов, содержащему первую жесткую опору с первым фиксатором и вторым фиксатором, к которой крепится механизм гибких осей, определяющий воображаемую ось поворота, вокруг которой свободно поворачивается грузик, и содержащий, по меньшей мере, одну переднюю гибкую RCC-ось и одну заднюю гибкую RCC-ось, установленные последовательно по принципу «голова к хвосту» относительно друг друга вокруг вышеуказанной воображаемой оси поворота, причем вышеуказанная передняя гибкая RCC-ось содержит между вышеуказанной первой опорой и промежуточной поворотной опорой две прямые гибкие передние пластины одинаковой передней длины между их точками зажимания, определяющие два линейных передних направления, которые пересекаются у вышеуказанной воображаемой оси поворота и которые определяют с помощью вышеуказанной воображаемой оси поворота передний угол, причем соответствующие фиксаторы вышеуказанных двух прямых гибких передних пластин, наиболее удаленные от вышеуказанной воображаемой оси поворота, находятся на одинаковом переднем расстоянии от вышеуказанной воображаемой оси поворота, и вышеуказанная задняя гибкая RCC-ось содержит между вышеуказанной промежуточной поворотной опорой, которая содержит третий фиксатор и четвертый фиксатор, и вышеуказанным поворотным грузиком две прямые гибкие задние пластины одинаковой задней длины между их точками зажимания, определяющие два линейных задних направления, которые пересекаются у вышеуказанной воображаемой оси поворота и которые определяют с помощью вышеуказанной воображаемой оси поворота задний угол, причем соответствующий фиксаторы вышеуказанных двух гибких задних пластин, наиболее удаленные от вышеуказанной воображаемой оси поворота, расположены на одинаковом заднем расстоянии от вышеуказанной воображаемой оси поворота.
Изобретение также относится к ходовому механизму часов, содержащему, по меньшей мере, один такой механизм резонатора.
Изобретение также относится к часам, содержащим, по меньшей мере, один ходовой механизм такого типа.
Изобретение относится к области механизмов резонаторов часов.
Уровень техники
Известно, что использование гибкой оси позволяет заменять существующую ось баланса и пружину баланса, упруго возвращаемого в исходное положение. Это обеспечивает преимущество предотвращения трения оси. Известно, что гибкие оси создают нелинейную упругую восстанавливающую силу, которая делает резонатор анизохронным, т.е. частота зависит от амплитуды колебаний, и в них имеют место нежелательные перемещения мгновенной оси вращения, что делает скорость резонатора чувствительной к его положению в поле силы тяжести.
Проблему, связанную с нелинейной упругой восстанавливающей силой, сложно устранить, и существующие геометрические решения улучшения линейности упругой восстанавливающей силы и, соответственно, обеспечения изохронности резонатора в заданном диапазоне угловой амплитуды требуют его изготовления на нескольких уровнях. В патентном документе WO 2016096677 от имени The Swatch Group Research & Development Ltd, включенного в настоящее описание посредством ссылки, описывается резонатор часов со скрещенными пластинами в двух наложенных плоскостях и разъясняется важность значения конкретного угла для оптимизации линейности упругой восстанавливающей силы и, соответственно, обеспечения изохронности резонатора в заданном диапазоне угловой амплитуды. Однако такая гибкая ось не может изготавливаться посредством двухмерного травления, что усложняет ее изготовление.
В патентном документе EP 3021174 от имени LVMH SWISS MFT SA описывается монолитный регулятор часов, выполненный как отдельная пластина, содержащая жесткий наружный элемент, жесткий внутренний элемент и упругие подвески, соединяющие жесткий наружный элемент с жестким внутренним элементом и обеспечивающие перемещения колебания. Жесткий внутренний элемент содержит плечи, которые жестко соединены друг с другом, оставляя между собой пространства, в которых расположены упругие подвески. В этом документе представлена компактная система, включающая в себя оси, которые содержат гибкие пластины, однако в этом документе не описывают никакие отличительные признаки, способные обеспечить изохронизм (скорость, независящую от амплитуды) или нечувствительность к положению в пространстве в поле силы тяжести (скорость, независящую от положения). Архитектура пластин и промежуточных опор является специфической: следует отметить, что концы двух пластин рядом с осью вращения соединены с двумя разными промежуточными опорами и не соединены с одним и тем же жестким элементом и, следовательно, они не являются RCC-осями (с вынесенным центром податливости); также можно отметить, что точки зажимания рядом с осью поворота первой оси нежестко соединены промежуточной опорой с точками зажимания, удаленными от оси поворачивания второй оси. И, наконец, описанная система образована из трех идентичных простейших гибких структур, повторяющихся через каждые 120° и скомбинированных параллельно подобно пружинам. Учитывая, что каждая из этих структур определяет собственную ось вращения, вся система ясно является гиперстатической, т.е. число напряжений превышает число напряжений, необходимое для работы системы. Соответственно, это ведет к нарушению линейности отношения между деформацией и крутящим моментом упругого возврата до такой степени, что резонатор не может быть изохронным. Изучение содержание документа не позволяет определить конкретные геометрические параметры. В патентном документе WO 2012/010408 от имени NIVAROX-FAR описывается колебательный механизм для ходового механизма часов, содержащий первый жесткий элемент и второй жесткий элемент, каждый из которых выполнен с возможностью крепления к своему элементу ходового механизма, и один из которых может перемещаться относительно другого и поворачивается вокруг теоретической оси поворота. Колебательный механизм является гибким механизмом с переменной геометрией, выполнен как монолитный элемент и содержит первые средства упругого возврата, образующие прямое или косвенное упругое соединение между вышеуказанным первым жестким элементом и промежуточным жестким элементом, и содержит, по меньшей мере, вторые средства упругого возврата, образующие прямое или косвенное упругое соединение между вышеуказанным промежуточным жестким элементом и вторым жестким элементом. Первый жесткий элемент, первые средства упругого возврата, промежуточный жесткий элемент, вторые средства упругого возврата и второй жесткий элемент лежат в одной плоскости и выполнены с возможностью деформирования в этой плоскости. Точнее, первые средства упругого возврата включают в себя, по меньшей мере, одну упругую пластину, и вторые средства упругого возврата включают в себя, по меньшей мере, одну упругую пластину. И в этом случае описанная система является гиперстатической, поскольку она образована из двух простейших гибких структур, которые повторяются через каждые 180° и скомбинированы параллельно.
В патентном документе EP 2645189 от имени NIVAROX-FAR описывается анкерный механизм часов, содержащий баланс и анкерное колесо. Передача импульсов между балансом и анкерным колесом обеспечивается с помощью монолитного гибкого механизма, содержащего, по меньшей мере, контактный шпиндель, взаимодействующий с анкерным колесом или, соответственно, с балансом, и этот монолитный гибкий механизм соединен, по меньшей мере, одной гибкой пластиной с неподвижной структурой часов или, соответственно, с анкерным колесом. Точнее, этот монолитный гибкий механизм является гибким изогнутым паллетным рычагом или швейцарским рычагом постоянного давления с двумя устойчивыми положениями, причем этот паллетный рычаг включает в себя рычаг, снабженный вилкой и предохранительным штифтом и содержащий поворотную гибкую направляемую ось, причем паллетный рычаг взаимодействует с двухуровневым анкерным колесом, содержащим импульсные штифты на двух соответствующих уровнях, и паллетный рычаг также содержит на другом уровне по отношению к гибкой оси импульсный штифт, предназначенный для взаимодействия с анкерным колесом для перемещения паллетного рычага вблизи его точки наклона.
В патентном документе EP 2911012 от имени CSEM описывается поворотный осциллятор для часов, содержащий опорный элемент, позволяющий выполнять сборку осциллятора в часах, баланс, некоторое количество гибких пластин, соединяющих опорный элемент с балансом и выполненных с возможностью прикладывания крутящего момента возврата к колесу баланса, и ободок, установленный совместно с балансом. Это некоторое количество гибких пластин содержит, по меньшей мере, первую гибкую пластину, расположенную в первой плоскости, перпендикулярной плоскости осциллятора, и вторую гибкую пластину, расположенную во второй плоскости, перпендикулярной плоскости осциллятора и пересекающейся с первой плоскостью. Геометрическая ось колебания осциллятора определяется пересечением первой плоскости и второй плоскости, причем эта геометрическая ось колебания пересекает первую и вторую пластины на 7/8 их соответствующей длины. Точнее, некоторое количество гибких пластин содержит одну пару, образованную первой и второй пластинами с идентичной геометрией и расположенную в первой плоскости, и третью пластину, расположенную во второй плоскости, вставленную между первой и второй пластинами и имеющую высоту, которая соответствует двойной высоте первой и второй пластин.
Раскрытие изобретения
Изобретение предлагает механический резонатор высокого качества с использованием инерционной части, такой как баланс, поддерживаемой поворотной направляющей конструкцией с гибкими пластинами, также именуемой гибкой осью, которая также действует в качестве средства упругого возврата в исходное положение. Этот резонатор должен быть изохронным (скорость, независящая от амплитуды) и невосприимчивым к положениям в поле силы тяжести (скорость, независящая от положения).
Настоящее изобретение ориентировано на комбинирование преимуществ двух известных двухмерной и трехмерной геометрий в простом и экономичном двухмерном варианте выполнения.
Изобретение также относится к механизму резонатора часов по п. 1 формулы изобретения.
Изобретение также относится к ходовому механизму часов, содержащему, по меньшей мере, один такой механизм резонатора.
Изобретение также относится к часам, содержащим, по меньшей мере, один ходовой механизм этого типа.
Краткое описание чертежей
Другие отличительные признаки и преимущества изобретения станут понятными из приведенного ниже подробного описания со ссылкой на приложенные чертежи, на которых:
на фиг. 1 схематически показан механический резонатор по изобретению, содержащий между первой опорой, предназначенной для непосредственного или косвенного крепления к структуре ходового механизма часов, и подвижным поворотным грузиком, на котором собирается баланс с плечами, две гибкие RCC-оси, установленные последовательно и по принципу «голова к хвосту» вокруг промежуточной поворотной опоры и имеющие одну и ту же воображаемую ось поворота, причем каждая из них содержит две прямые гибкие пластины с центром масс узла, образованного подвижным поворотным грузиком и добавленным балансом, совпадающим с воображаемой осью поворота, вид в перспективе;
на фиг. 2 – вариант, в котором добавленный баланс содержит кольцевой ободок;
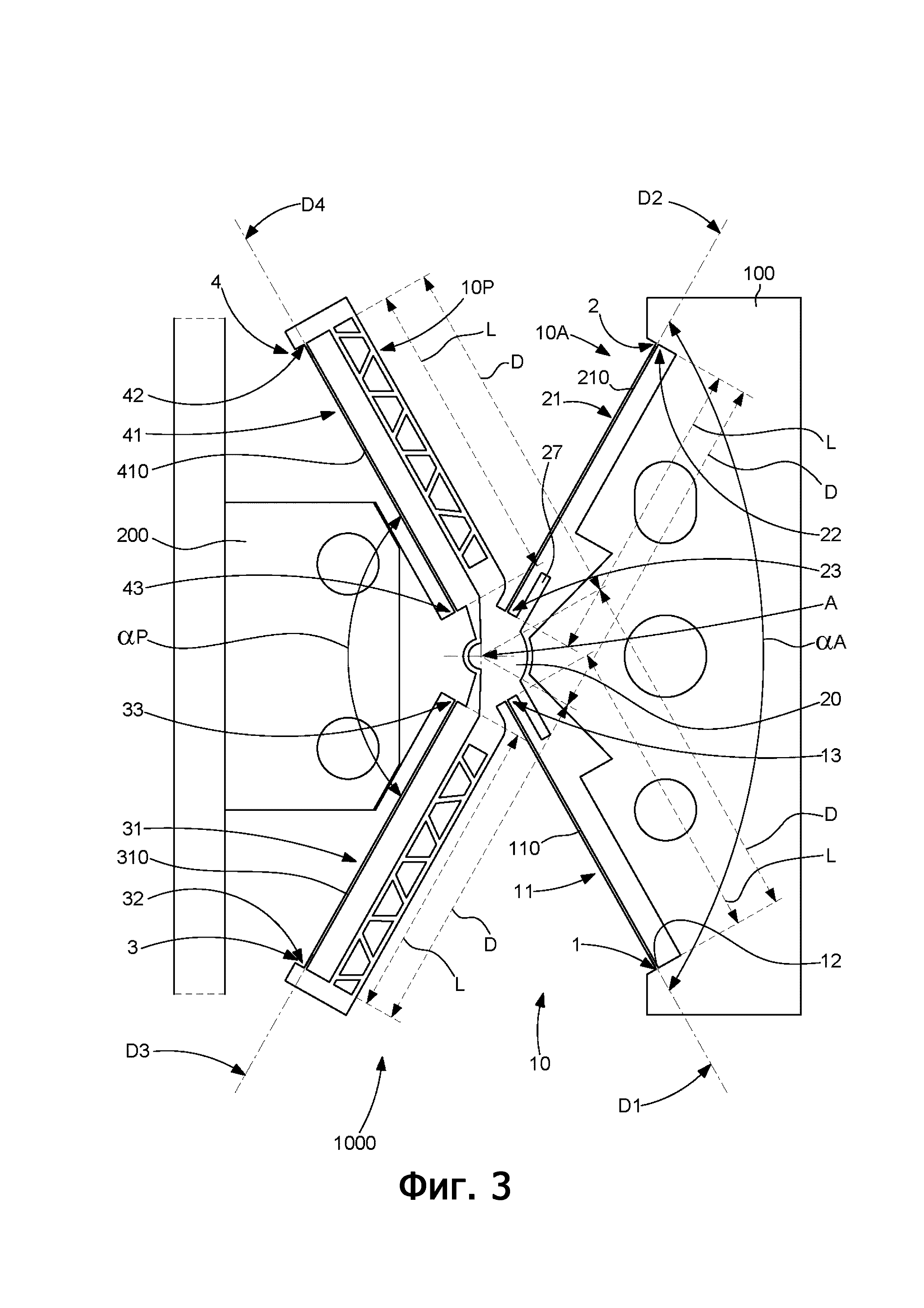
на фиг. 3 схематически показан центральный участок резонатора, изображенного на фиг. 1, вид сверху;
на фиг. 4 – то же, где показан ряд ограничительных поверхностей резонатора для противоударной защиты, местный вид;
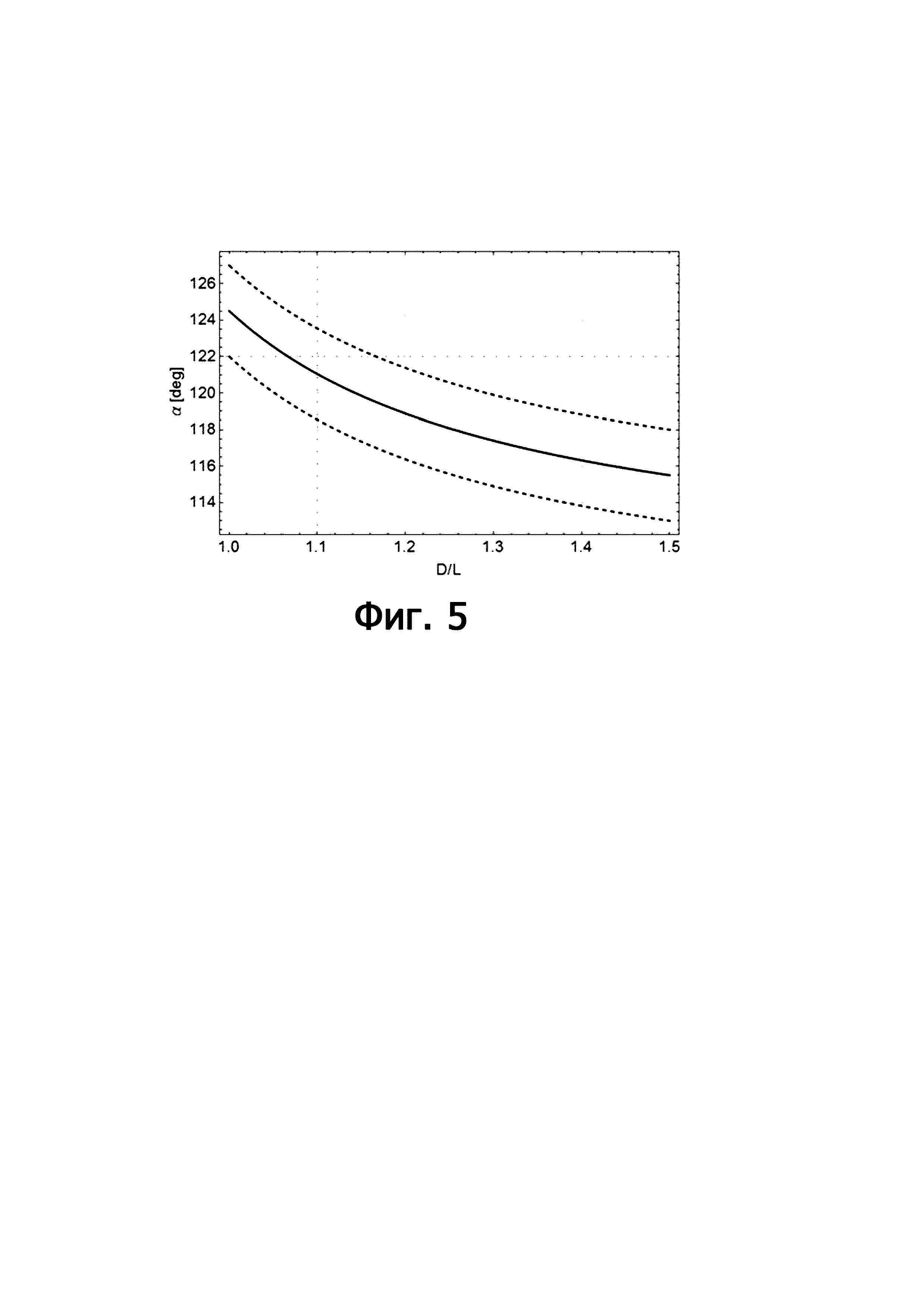
на фиг. 5 – график, на котором показано оптимальное значение угла между двумя пластинами каждой гибкой RCC-оси в функции отношения между, с одной стороны, расстоянием от точки зажимания пластины до оси поворота и, с другой стороны, длиной соответствующей пластины;
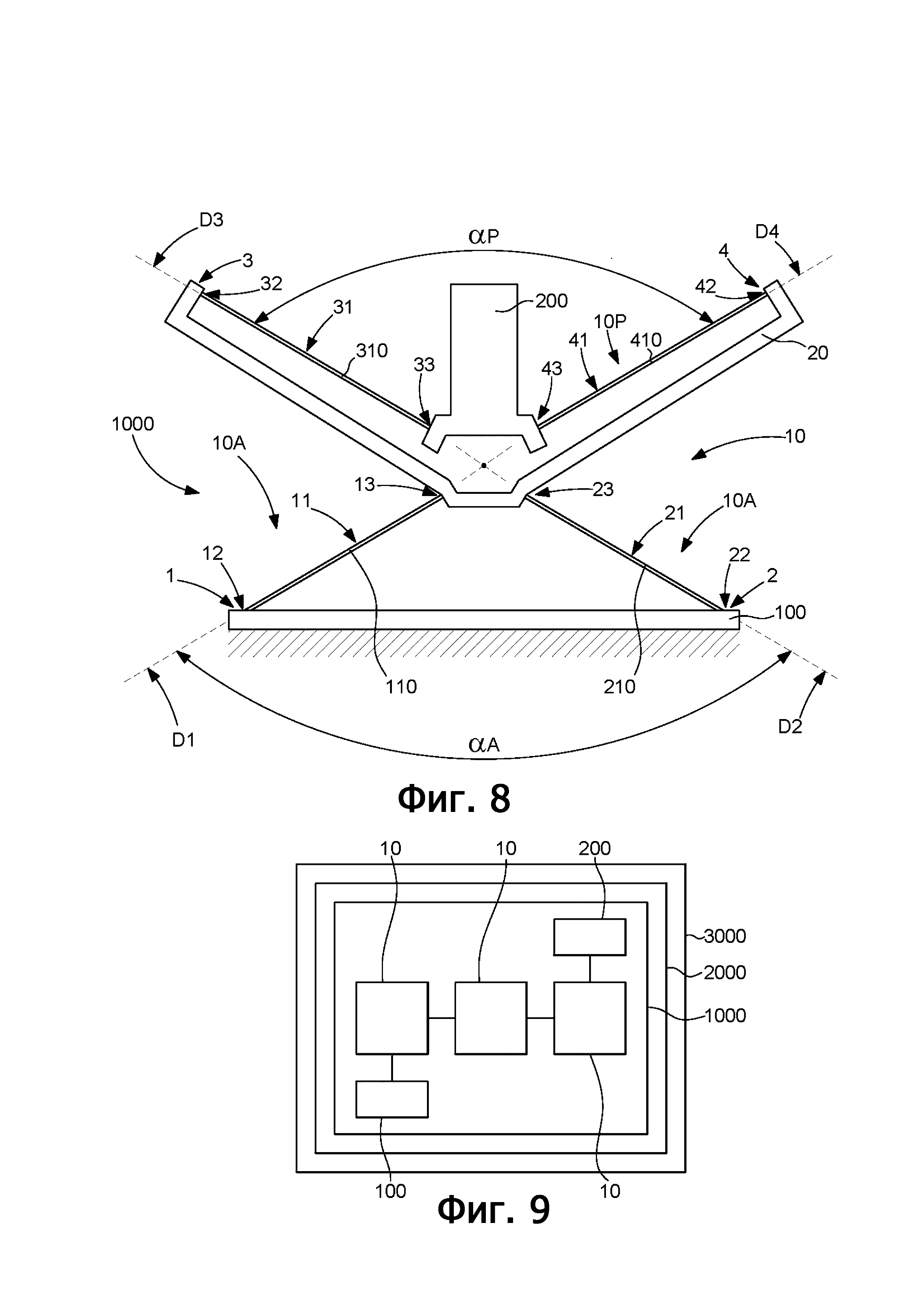
на фиг. 6 - 8 – другие варианты геометрических конструкций;
на фиг. 9 – схема часов с ходовым механизмом, содержащим резонатор по изобретению, который содержит несколько последовательно расположенных гибких поворотных механизмов;
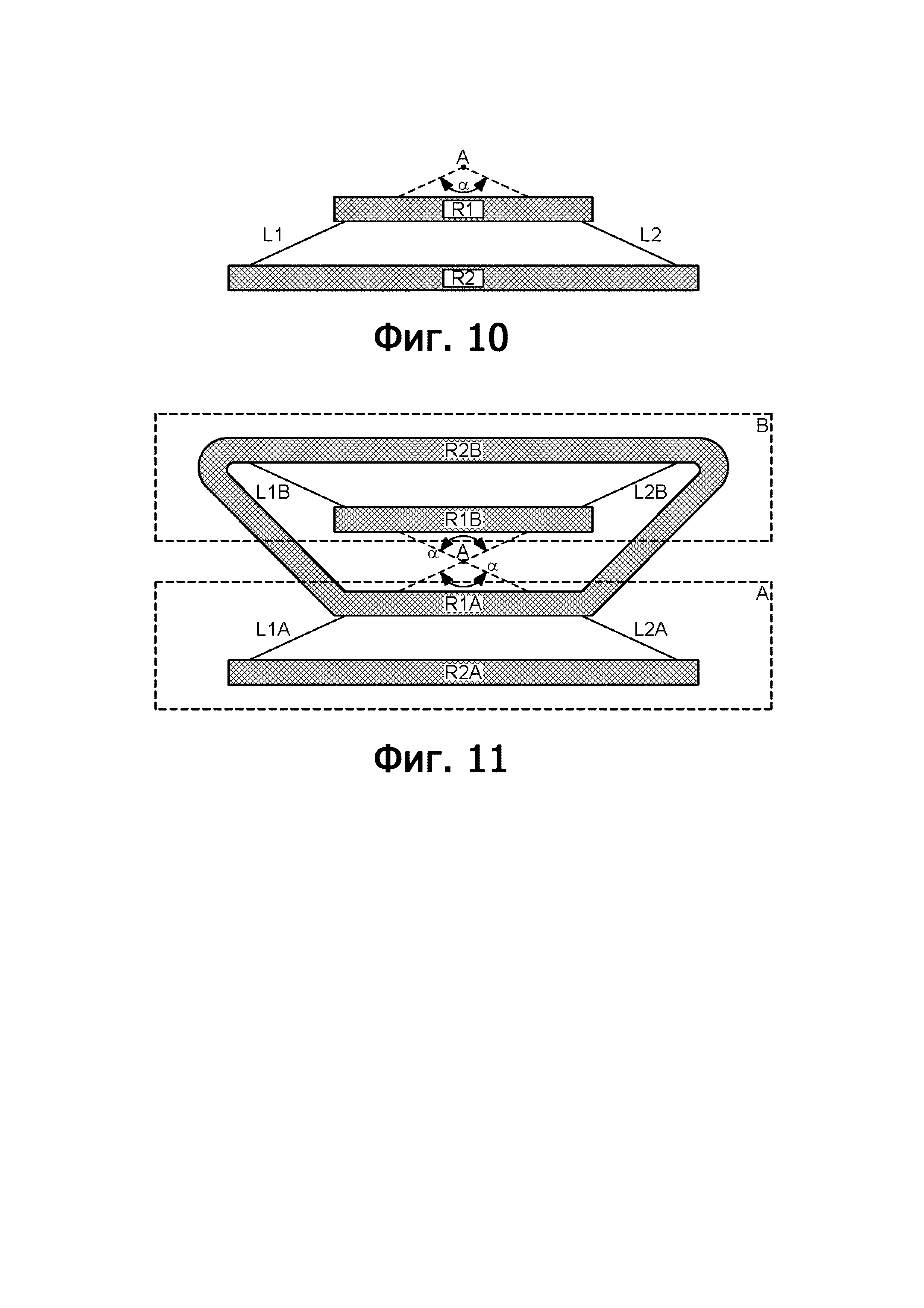
на фиг. 10 схематически показана RCC-ось, вид сверху;
на фиг. 11 схематически показана ось с гибкими пластинами, содержащая две симметричные RCC-оси, расположенные последовательно по принципу «голова к хвосту», вид сверху.
Осуществление изобретения
Изобретение относится к механизму 1000 резонатора часов, содержащему первую неподвижную или подвижную жесткую опору 100 с первым фиксатором 1 и вторым фиксатором 2, к которой крепится механизм 10 гибких осей, определяющий воображаемую ось A поворота, вокруг которой свободно поворачивается жесткий поворотный грузик 200.
Механизм 10 гибких осей представляет собой двухмерную гибкую ось, т.е. он может быть выполнен в одной плоскости.
Механизм 10 гибких осей позволяет поворотному грузику 200 совершать вращение вокруг воображаемой оси A поворота относительно первой жесткой опоры 100. Он образован из двух гибких RCC-осей (с вынесенным центром податливости, т.е. со смещенным центром вращения), оси вращения которых совпадают и которые соединены промежуточной жесткой поворотной опорой 20. Таким образом, две RCC-оси расположены последовательно, но относительно друг друга по принципу «голова к хвосту», так что их нежелательные перемещения компенсируют друг друга.
Изобретение является изостатическим в том смысле, что относительное движение частей происходит без чрезмерных напряжений из-за отсутствия других элементов, расположенных параллельно.
Простейшая ось с гибкими пластинами представляет собой узел, образованный из двух жестких частей R1 и R2, соединенных двумя гибкими пластинами L1 и L2, которые не касаются друг друга. В состоянии покоя пластины L1 и L2 являются прямыми и непараллельными, так что продолжение вышеуказанных пластин определяет точку A пересечения. Две жесткие части R1 и R2 могут совершать относительное вращательное движение вокруг оси, перпендикулярной плоскости, проходящей через точку A.
RCC-ось (с вынесенным центром податливости), показанная на фиг. 10, представляет собой простейшую ось с гибкими пластинами, в которой точка A пересечения расположена за пластинами. Она образована из двух пластин L1 и L2 одинаковой длины L, и точки зажимания пластин L1 и L2 в жесткой части R1 равноудалены от оси A вращения. RCC-оси хорошо известны специалистам в этой области (см. работу S. Henein «Conception des guidages flexibles» [Проектирование гибких осей], Presses polytechniques et universitaires romandes, 2001 г, стр. 101).
Геометрия RCC-оси характеризуется двумя параметрами:
(1) углом α между ее двумя пластинами и (2) отношением D/L, где D – расстояние между осью A вращения и наиболее удаленной от нее точкой зажимания пластин и L – длина каждой из двух пластин.
Изобретение включает в себя механизм 10 гибких осей, образованный из двух последовательно расположенных RCC-осей, так что:
- две RCC-оси, из которых он образован, расположены в одной и той же плоскости;
- две RCC-оси, из которых он образован, имеют одну и ту же ось A вращения;
- две RCC-оси, из которых он образован, имеют одни и те же параметры α и D/L.
Кроме того, жесткая часть, наиболее близко расположенная к оси вращения одной из осей (R1A на фиг. 11), жестко соединена с жесткой частью, наиболее удаленной от оси вращения другой оси (R2B на фиг. 11). Таким образом, две RCC-оси последовательно расположены по принципу «голова к хвосту», как видно на фиг. 11.
Таким образом, механизм гибких осей изобретения образован только из трех жестких частей и четырех пластин, расположенных в плоскости направляющего устройства. Для обеспечения изостатичности поворотного направляющего устройства важно, чтобы не было никаких других гибких соединений между вышеуказанными тремя жесткими частями в вышеуказанной плоскости направляющего устройства. Тем не менее, вполне можно предусмотреть размещение другого механизма гибких осей в другой плоскости, параллельной плоскости первого направляющего устройства и удаленной от нее. Этот второй механизм гибких осей при необходимости может быть соединен последовательно или параллельно с первым поворотным направляющим устройством.
Первая жесткая часть (R1B на фиг. 11) может быть прикреплена к платине, и инерционный грузиком, в частности, баланс, может быть прикреплен к третьей жесткой части (R2A на фиг. 11) Также возможно реверсивное расположение.
Один из четырех сегментов промежуточной жесткой части может быть прерывистым. Это относится к показанному на фигурах неограничивающему варианту. Однако важно, чтобы четыре точки зажимания пластин в промежуточной части (L1A, L2A в L1A и L1B, L2B в R2B на фиг. 11) были жестко соединены друг с другом.
Подразумевается, что точки зажимания рядом с воображаемой осью A поворота первой RCC-оси жестко соединены через промежуточную поворотную опору 20 с точками зажимания, удаленными от воображаемой оси A поворота второй RCC-оси, или наоборот, как показан она фиг. 6 и 7.
Таким образом, механизм 10 гибких осей включает в себя переднюю гибкую RCC-ось 10A и заднюю гибкую RCC-ось 10P, которые расположены последовательно друг с другом и по принципу «голова к хвосту» относительно общей воображаемой оси A поворота и которые включают в себя гибкие упругие элементы.
Передняя гибкая RCC-ось 10A включает в себя между первой опорой 100 и промежуточной поворотной опорой 20 два передних упругих узла 11, 21, образованных в варианте выполнения на фигурах двумя прямыми гибкими пластинами 110, 210 одинаковой передней длины LA между их точками зажимания, определяющими два линейных передних направления D1, D2, которые пересекаются на воображаемой оси A поворота и которые определяют с помощью воображаемой оси A поворота передний угол αA, причем соответствующие фиксаторы двух прямых гибких передних пластин 110, 210, наиболее удаленные от воображаемой оси A поворота, находятся на одинаковом переднем расстоянии DA от воображаемой оси A поворота.
Аналогично, задняя гибкая RCC-ось 10P включает в себя между промежуточной поворотной опорой 20, которая включает в себя третий фиксатор 3 и четвертый фиксатор 4, и поворотным грузиком 200 два задних упругих узла 31, 41, образованных в варианте выполнения на фигурах двумя прямыми гибкими задними пластинами 310, 410 одинаковой задней длины LP между их точками зажимания, определяющими два линейных задних направления D3, D4, которые пересекаются на воображаемой оси A поворота и которые определяют с помощью воображаемой оси A поворота задний угол αP, причем соответствующие фиксаторы двух прямых гибких задних пластин 310, 410, наиболее удаленные от воображаемой оси A поворота, находятся на одинаковом переднем расстоянии DP от воображаемой оси A поворота.
Кроме того, механизм 10 гибких осей является плоским.
Изобретение состоит в оптимизации угла между упругими элементами каждой гибкой RCC-оси, так чтобы ось создавала линейную упругую восстанавливающую силу, и механический резонатор был изохронным в заданном диапазоне угловой амплитуды.
По изобретению центр инерции узла, образованного поворотным грузиком 200 и каким-либо дополнительным инерционным грузиком 201, помещенным на поворотном грузике 200, как в неограничивающих вариантах на фиг. 1 и 2, лежит на воображаемой оси A поворота или в непосредственной близости от него, и механический резонатор является изохронным, если:
- передний угол αA, выраженный в градусах, находится в диапазоне между:
107 + 5/[(DA/LA)-(2/3)] и 114 + 5/[(DA/LA)-(2/3)],
- задний угол αP, выраженный в градусах, находится в диапазоне между:
107 + 5/[(DP/LP)-(2/3)] и 114,5 + 5/[(DP/LP)-(2/3)].
В конкретном варианте передний угол αA и задний угол αP равны общему углу α. Точнее, этот общий угол α близок к 118°.
В предпочтительном варианте переднее расстояние DA и заднее расстояние DP равны общему расстоянию D, и передняя длина LA и задняя длина LP равны общей длине L.
Следовательно, общий угол α находится в диапазоне между:
107 + 5/[(D/L)-(2/3)] и 114,5 + 5/[(D/L)-(2/3)].
Оптимальное значение угла α зависит, главным образом, от отношения D/L, но оно также зависит от радиусов точек зажимания пластин, соотношения сторон сечения пластин и толщины слоя SiO2, используемого для температурной компенсации.
Оптимальная кривая для конкретных значений радиуса точек зажимания и отношения сторон пластин показана сплошной линией на фиг. 5, где отображен процесс изменения оптимального угла α в функции отношения D/L.
Разумеется, различные значения радиусов точек зажимания и отношения сторон сечения пластин в результате дают различные значения оптимального угла α. Угловой диапазон показан на фиг. 5 между прерывистыми линиями.
В частности, угол α и параметр D/L удовлетворяют соотношению:
107 + 5/((D/L)-(2/3)) < α < 112 + 5/((D/L)-(2/3)).
В частности, в вариантах, показанных на фигурах, первый передний упругий узел 11, второй передний упругий узел 21, первый задний упругий узел 31 и второй задний упругий узел 41 образованы из прямых гибких пластин 110, 210, 310, 410.
В другом варианте, который не показан на фигурах, первый передний упругий узел 11, второй передний упругий узел 21, первый задний упругий узел 31 и второй задний упругий узел 41 включают в себя чередование прямых гибких пластин и промежуточных элементов, которые являются более жесткими, чем прямые гибкие пластины, выровненные в соответствующих направлениях D1, D2, D3, D4.
Для получения механического резонатора высокого качества полезным является добавление инерционного элемента к поворотному грузику 200 или включение этого элемента в состав поворотного грузика и крепление первой жесткой опоры 100 к плате или мосту ходового механизма часов или другому элементу, способному действовать в качестве опоры для резонатора гибкой оси, например, неограничивающим образом, соединительному элементу для эталонного генератора частоты или противоударному элементу, который может перемещаться только в случае сильного удара, для уменьшения ускорения, которому подвергается резонатор. Разумеется, представленные здесь неподвижная часть и подвижная часть, являются взаимозаменяемыми. Этот инерционный элемент может быть диском, кольцом, например, ободком баланса как показано на фиг. 2. или просто плечом, как показано на фиг. 1. важно, чтобы центр масс инерционного элемента был, по существу, выровнен с воображаемой осью A поворота.
Во избежание нежелательных основных типов вибрации полезно, чтобы жесткая промежуточная поворотная опора 20 была более тонкой с углублениями 209 для уменьшения ее инерции с одновременным приданием этой опоре намного большей жесткости по сравнению с жесткостью гибких пластин, образующих упругие узлы 11, 21, 31 и 41, как показано на фиг. 1 - 4.
Аналогично, когда упругие элементы содержат промежуточные элементы, которые являются более жесткими, чем прямые гибкие пластины, эти промежуточные элементы преимущественно также являются более тонкими.
Другой преимущественная разновидность все вариантов выполнения состоит в расположении жестких частей 100, 20, 200 очень близко друг к другу относительно воображаемой поворотной оси A, так чтобы они действовали как радиальные и/или угловые противоударные ограничительные элементы для предотвращения поломки пластин, как показано на фиг. 4, с помощью поверхностей 105, 25, 26, 28, 208, в частности, наклонных поверхностей 28 и 208, которые в значительной степени способствуют стойкости к ударным нагрузкам системы. Или же жесткие части могут быть снабжены жесткими плечами 27, предназначенными для взаимодействия при соприкосновении в случае удара с ответными поверхностями 107, предусмотренными на первой опоре 100, как видно на фиг. 4, где промежуточная поворотная опора 20 содержит такие ограничительные плечи 27.
Изобретение может быть внедрено с помощью пластин переменной толщины. В таком случае оптимальный угол между пластинами должен быть выбран надлежащим образом.
Принципиально важно соблюдать симметрию гибкости относительно биссектрисы угла αA и относительно воображаемой оси A поворота.
Изобретение особенно пригодно для вариант выполнения в виде монолитного элемента.
В преимущественном варианте выполнения первая опора 100, поворотный грузик 200 и механизм 10 гибких осей образуют цельный узел. Цельный узел может быть изготовлен или посредством обычной механической обработки или, в частности и неисключительно, с помощью технологий MEMS или LIGA или 3D-печати или аддитивной технологии с использованием лазера и т.п. из кремния, кварца, DLC, металлических сплавов, стекла, рубина, сапфира или другой керамики или нагруженных или ненагруженных полимеров и т.п. с компенсацией температурных воздействий, в частности, посредством локального роста пленки диоксида кремния в определенных местах детали, предназначенных для этой цели, когда цельный узел изготавливается из кремния. Разумеется, могут использоваться другие материалы, в некоторых случаях за счет компенсации температурных воздействий. В частности, неограничивающим образом могут быть упомянуты аморфные или кристаллические металлические сплавы.
Когда поворотный грузик 200 содержит дополнительный инерционный грузик 201, механизм 10 гибких осей преимущественно выполняется из кремния, окисляемого таким образом, что весь механизм 1000 резонатора с дополнительным инерционным грузиком 201 подвергается компенсации температурных воздействий.
Механизм 1000 резонатора часов может содержать некоторое количество таких механизмов 10 гибких осей, установленных последовательно для увеличения общего углового перемещения и расположенных в параллельных плоскостях вокруг одной и той же воображаемой поворотной оси A. Такой элемент может быть образован посредством сборки двух частей, полученных травлением на одном уровне, или он может быть получен травлением кремния на двух уровнях посредством использования технологии «кремний на изоляторе».
В конфигурации эталонного генератора частоты преимущественно могут использоваться два механизма гибких осей для исключения реакции в опоре; может быть выполнена экстраполяция для числа N механизмов гибких осей.
Изобретение также относится к ходовому механизму 2000, часов, содержащему, по меньшей мере, один механизм 1000 резонатора часов.
Изобретение также относится к часам 3000, содержащим, по меньшей мере, один ходовой механизм 2000 этого типа.
Изобретение предлагает ряд преимуществ:
- надлежащий изохронизм, при этом скорость не зависит от положения в поле силы тяжести и амплитуды;
- технологичность благодаря группированию функциональных элементов в одной двухмерной плоскости посредством травления в кремнии и т.п. или формования или резки пластин, электроискровой обработки, лазерной обработки, гидроструйной обработки, аддитивной технологии или других средств.
Реферат
Часы (3000) или ходовой механизм (2000), содержащие механизм (1000) резонатора часов, содержащий две гибкие RCC-оси (10A, 10P), установленные последовательно вокруг промежуточной поворотной опоры (20) и имеющие одну и ту же воображаемую ось (A) поворота, причем каждая из них содержит две прямые гибкие пластины (110, 210; 310, 410) одинаковой длины (L), зажимные точки которых напротив этой оси (A) находятся на одном и том же расстоянии (D) относительно этой оси, причем вышеуказанные пластины определяют линейные направления (D1, D2, D3, D4), попарно образующие углы с помощью воображаемой оси (A) поворота, величина которых, выраженная в градусах, находится в диапазоне между: 109,5 + 5/[(D/L)-(2/3)] и 114,5 + 5/[(D/L)-(2/3)], или, точнее, между 107 + 5/[(D/L)-(2/3)] и 114 + 5/[(D/L)-(2/3)], причем этот механизм (1000) резонатора часов в преимущественном варианте является цельным узлом из кремния с компенсацией температурных воздействий. 3 н. и 10 з.п. ф-лы, 11 ил.
Комментарии