Механизм анкерный гибкий с подвижной рамой - RU2607339C2
Код документа: RU2607339C2
Чертежи





Описание
Область техники
Изобретение относится к анкерному механизму часового механизма или часам, включающим по меньшей мере один баланс и по меньшей мере одно анкерное колесо, в которых передача импульсов передача импульсов между указанным по меньшей мере одним балансом и указанным по меньшей мере одним анкерным колесом осуществляется при помощи гибкого механизма из единой детали, содержащегося в указанном анкерном механизме и включающего по меньшей мере один контактный шпиндель, взаимодействующий с указанным по меньшей мере одним анкерным колесом или соответственно с указанным по меньшей мере одним балансом, и в которых указанный состоящий из единой детали гибкий механизм является блокирующим рычагом, который включает по меньшей мере одну подвижную раму с фиксирующими зубцами для взаимодействия с зубьями указанного анкерного колеса, множество указанных гибких пластин, которые являются предварительно нагруженными изогнутыми гибкими пластинами, и вилку с выступами для взаимодействия с импульсным камнем указанного баланса, и в которых указанная подвижная рама полностью окружает указанное анкерное колесо.
Изобретение также относится к часовому механизму, включающему неподвижную структуру и по меньшей мере один механизм данного типа.
Изобретение также относится к часам, включающим неподвижную структуру и по меньшей мере один механизм данного типа и/или по меньшей мере один часовой механизм данного типа.
Изобретение относится к области часовых механизмов, а более конкретно - к области анкерных механизмов.
Уровень техники
Для обеспечения производительности при изготовлении часов требуются высокоточные механизмы с минимальными требованиями к габаритам и малым числом компонентов для контроля затрат на изготовление, сборку и регулировку. Технологии LIGA и DRIE обеспечивают изготовление гибких точных компонентов и являются перспективной альтернативой для стандартных схем, которые отличаются большим числом компонентов и сложностью регулировок.
Международный патент WO No 2011/120180 А1 фирмы Rolex SA, описывает паллетный двуплечий блокирующий рычаг, каждое плечо которого снабжено камнем паллеты для зацепления с одним и тем же зубчатым колесом, при этом два эластичных плеча соединяют тормозной рычаг с рамой, которая позволяет ему поворачиваться, а третий эластичный элемент по существу формирует систему с двумя положениями равновесия.
В патенте УЗ №2037335 А2 фирмы Enzler & Von Gunten описывается состоящий из единой детали швейцарский рычаг с двумя плечами, каждое из которых снабжено камнем паллеты, и включающий плечи, сформированные гибкими пластинами, объединенными в структуру и определяющими виртуальную ось.
В патенте ЕР №2450755 А1 фирмы Nivarox описывается анкерное колесо часового механизма, включающее множество зубчатых колес, которые являются соосными, вращаются синхронно относительно шарнирной оси и включают по меньшей мере одно первое импульсное колесо в одной первой импульсной плоскости и по меньшей мере одно второе зубчатое спусковое колесо в одной второй упорной плоскости, параллельной или совпадающей с первой импульсной плоскостью. Второе спусковое зубчатое колесо включает по меньшей мере один подвижный узел, который включает, с одной стороны, по меньшей мере один спусковой зуб, который может перемещаться в радиальном направлении относительно шарнирной оси и возвращается в положение равновесия первый возвращающим средством, и, с другой стороны, по меньшей мере один фиксирующий зуб, возвращаемый в первом радиальном направлении в сторону фиксированного положения при помощи одного второго возвращающего средства. Спусковой зуб включает приводное средство, выполненное таким образом, что, когда зуб перемещается во втором радиальном направлении, противоположном первому радиальному направлению, оно взаимодействует с ответным приводным средством, содержащимся в фиксирующем зубе, для привода фиксирующего зуба во втором радиальном направлении. Когда спусковой зуб перемещается в первом радиальном направлении, приводное средство перемещается на некоторое расстояние от ответного приводного средства без привода фиксирующего зуба.
В патенте ЕР №2105806 А1 фирмы Girard Perregaux SA описывается деформируемая рама, определяющая две ортогональных оси, включающая пластинчатую пружину, изогнутую вдоль наибольшего размера и предназначенную для возврата энергии при изменениях формы пластины с двумя положениями равновесия.
В патенте ЕР No 2 221677 А1 фирмы Rolex SA описывается анкер со спусковой пружиной, рычаг которого поворачивается, преодолевая действие пружины, которая толкает стопорный элемент указанного рычага в сторону анкерного колеса; на рычаге установлен спусковой элемент, который взаимодействует со спусковым пальцем, установленным на ролике, положение которого может меняться относительно ролика баланса за счет изменения скорости баланса.
В патенте СН №60813 А на имя Шортила (Shortill) описывается рычажный анкер, анкерное колесо которого включает с обеих сторон фланца чередующиеся зубья, взаимодействующие с камнями паллет, установленными напротив друг друга и ориентированными навстречу друг другу.
В патенте ЕР №1967919 А1 фирмы ETA SA описывается анкер, создающий импульсы в тангенциальном направлении, содержащий подвижную раму в форме кольца, содержащую камни паллет, предназначенные для взаимодействия с зубьями подвижного анкера, расположенного внутри кольца.
Краткое описание изобретения
В изобретении предлагается способ преодоления ограничений известных архитектур за счет разработки компактных механизмов малой толщины, которые являются экономичными в производстве.
Для этой цели изобретение относится к анкерному механизму для часового механизма или к часам, включающим по меньшей мере один баланс и по меньшей мере одно анкерное колесо, в которых передача импульсов между указанным по меньшей мере одним балансом и указанным по меньшей мере одним анкерным колесом обеспечивается при помощи гибкого механизма из единой детали, содержащегося в указанном анкерном механизме и включающего по меньшей мере один контактный шпиндель, взаимодействующий с указанным по меньшей мере одним анкерным колесом или соответственно с указанным по меньшей мере одним балансом, и в которых указанный состоящий из единой детали гибкий механизм соединен по меньшей мере одной гибкой пластиной, содержащейся в нем, с неподвижной структурой указанных часов, либо соответственно с указанным по меньшей мере одним анкерным колесом, в которых указанный гибкий механизм из единой детали является блокирующим рычагом, который включает по меньшей мере одну подвижную раму с фиксирующими зубцами, взаимодействующими с зубьями указанного анкерного колеса, множество указанных гибких пластин, которые являются предварительно нагруженными изогнутыми гибкими пластинами, и вилку с выступами, взаимодействующими с импульсным камнем указанного баланса, и в которых указанная подвижная рама полностью окружает указанное анкерное колесо, отличаются тем, что указанные гибкие пластины продолжаются пружинами, которые выполнены за одно целое с грузами, которые либо жестко закреплены на указанной неподвижной структуре, либо имеют малую степень свободы относительно указанной структуры, ограниченную продолговатыми участками, взаимодействующими со штырями, содержащимися в указанной жесткой структуре, в направлении, ортогональном направлению поступательного перемещения, называемом абсциссой указанной подвижной рамы.
Изобретение также относится к часовому механизму, включающему неподвижную структуру и по меньшей мере один механизм данного типа.
Изобретение также относится к часам, включающим неподвижную структуру и по меньшей мере один механизм данного типа и/или по меньшей мере один часовой механизм данного типа.
Краткое описание чертежей
Прочие признаки и преимущества изобретения станут очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых:
Фиг. 1-10 - схематические виды различных этапов движения конкретного варианта анкерного механизма с направляющим элементом, имеющим нулевую жесткость, который в общем виде показан на Фиг. 11 в другом упрощенном варианте;
Фиг. 12 - блок схема часов с механизмом, включающим механизм данного типа.
Подробное описание предпочтительных вариантов осуществления изобретения
Многочисленные часовые механизмы могут изготавливаться с уменьшенным числом компонентов и предпочтительно с использованием компонентов, выполненных из силикона или при помощи способа LIGA или DRIE, содержащих гибкие участки.
Эти гибкие участки могут применяться для формирования направляющих элементов, в частности направляющих шарниров, и/или для формирования упругих возвращающих средств.
«Гибкие направляющие элементы» в нижеследующем описании обозначают поступательные или вращательные направляющие элементы, содержащие одну или большее число пластин. Эти направляющие элементы обладают множеством преимуществ, среди которых, в частности, можно указать следующие: точность, отсутствие трения, отсутствие гистерезиса, отсутствие износа, отсутствие потребности в смазке, отсутствие заклинивания, возможность применения технологии изготовления монолитных деталей. Наиболее общими ограничениями являются следующие: ограниченные перемещения, малая плотность возвратной силы или момента, в некоторых случаях сложная кинематика, ограничения по воспринимаемой нагрузке.
Гибкие направляющие элементы могут модифицироваться для обеспечения нулевой жесткости или для получения двух равновесных состояний в случае компонента, который работает за счет потери устойчивости под действием напряжений, прилагаемых с обеих сторон от среднего направления, с каждой стороны от которого компонент может занимать два различных устойчивых положения.
Изобретение может относиться к анкерному механизму 100 часового механизма 900 или часам 1000, включающим по меньшей мере один баланс 300 и по меньшей мере одно анкерное колесо 400.
Согласно изобретению передача импульсов между указанным по меньшей мере одним балансом 300 и указанным по меньшей мере одним анкерным колесом 400 обеспечивается через гибкий механизм 500 из единой детали. Данный гибкий механизм 500 из единой детали включает по меньшей мере один контактный шпиндель 600, взаимодействующий с указанным по меньшей мере одним анкерным колесом 400 или соответственно с указанным по меньшей мере одним балансом 300. Состоящий из единой детали гибкий механизм 500 соединен по меньшей мере одной гибкой пластиной 700 или предпочтительно множеством гибких пластин, формирующих упругие возвращающие средства, с неподвижной структурой 800 указанных часов 1000, либо соответственно с указанным по меньшей мере одним анкерным колесом 400.
Конкретный вариант осуществления изобретения проиллюстрирован на Фиг. 1-11 и относится к анкерному механизму 100 с направляющим элементом, имеющим нулевую жесткость и по существу параксиальную подвижность.
Гибкий состоящий из единой детали механизм 500, содержащийся в данном механизме, также называется блокирующим рычагом.
Он включает множество гибких пластин 700, которые являются предварительно поджатыми изогнутыми гибкими пластинами 113.
Данный механизм 100 включает подвижную раму 111, шарнирно скрепленную при помощи гибких пластин 113 с неподвижными анкерными элементами 112. Эти гибкие пластины 113 являются балками, работающими в режиме потери изгибной устойчивости.
Гибкие пластины 113 в варианте, показанном на Фиг. 1-10, продолжаются пружинами 13. Эти пружины 13 выполнены за одно целое с грузами 80, которые либо жестко закреплены на неподвижной структуре 800, либо имеют малую степень свободы относительно структуры 800, как показано на Фиг. 1-10, на которых грузы 80 включают продолговатые участки 81, которые обеспечивают степень свободы на малом ограниченном ходе относительно штырей 112, содержащихся в жесткой структуре 800. Данная степень свободы обеспечивается в одном направлении Y, называемом направлением ординаты.
В отверстии 84 груза 80 предпочтительно с каждой стороны имеется кулачок 83 для обеспечения предварительного взведения.
Подвижная рама 111 включает по меньшей мере одну нагруженную пружину, обеспечивающую ее нулевую жесткость.
На данной подвижной раме 111, которая является эквивалентом рычага с паллетами, установлена вилка 114 с выступами 115 и заостренный выступ 116. Данная вилка 114 аналогична вилке швейцарского рычага и имеет все защитные устройства, предотвращающие выталкивание и размыкание.
В проиллюстрированном на фигурах варианте подвижная рама 111 полностью окружает анкерное колесо 400, с которым она находится в одной плоскости.
Так, данный гибкий состоящий из единой детали механизм 500 является блокирующим рычагом, который включает по меньшей мере одну подвижную раму 111, на которой установлены фиксирующие зубцы 119, взаимодействующие с зубьями 118 анкерного колеса 400, множество гибких пластин 700, которые являются предварительно нагруженными изогнутыми гибкими пластинами 113, и вилку 114, на которой имеются выступы 115 для взаимодействия с импульсным камнем 117 баланса 300.
Анкерное колесо 400 включает импульсные зубья 118А, 118В и т.д., расположенные на одинаковых угловых расстояниях друг от друга (60° на Фиг. 1-10, 90° на Фиг. 11).
Предпочтительно фиксирующие зубцы 119 сгруппированы в противоположные пары. В варианте осуществления изобретения, показанном на чертежах, первая пара зубцов 119А, 119С расположена вдоль первого направления X, называемом направлением абсциссы, в котором проходит и перемещается штырь 114 вилки; а вторая пара зубцов 119В, 119D проходит во втором направлении Y, называемом направлением ординаты перпендикулярном первому направлению X.
Эти импульсные зубья 118 могут взаимодействовать с зубьями, называемыми фиксирующими зубцами 119А, 119В, 119С, 119D подвижной рамы 111, расположенными под углом 90° друг к другу.
Баланс 300, маленький ролик 30 и большой ролик 31 аналогичны соответствующим элементам стандартного швейцарского рычага. Данная подвижная рама 111 предпочтительно может перемещаться по существу параксиальным образом и в основном перемещается в направлении X. Согласно конструкции направления данная подвижная рама 111 может совершать перемещения с малой амплитудой в направлении Y ординаты в пределах, определяемых ходом гибких пластин 113 и пружин 13, эти перемещения в направлении Y обеспечивают зацепление с упором или освобождение упорных элементов.
В конкретном варианте, показанном на Фиг. 1-10, подвижная рама 111 имеет упорные грани 11 в направлении X, которые взаимодействуют или не взаимодействуют, в зависимости от положения подвижной рамы 111, с ограничительными упорными элементами 12.
Если сформулировать кратко, то фиксирующий рычаг 500 включает по меньшей мере одну подвижную раму 111, гибкие пластины 113 и вилку 114 с выступами 115.
Кинематика механизма, показанного на Фиг. 11 является следующей.
Когда импульсный камень 117 входит в контакт с выступом 115, фиксирующий зубец 119А подвижной рамы 111 освобождает анкерное колесо 400, не вызывая обратного хода, и зуб 118В анкерного колеса по существу находящийся на одном уровне с фиксирующим зубцом 119А сообщает тангенциальный импульс подвижной раме 11 рычага с паллетой на фиксирующем выступе 119В. В конце импульса зуб 118С анкерного колеса фиксируется соответствующим зубом 119С рычага с паллетами. Импульсный цикл повторяется аналогичным образом для зубьев 118D и 119D.
Увеличение нагрузки на гибкие пластины 113 может создать систему с двумя положениями равновесия. Положение импульсного зуба 118В относительно фиксирующего зубца 119А может приблизить рычаг с паллетами к неустойчивому состоянию. В результате рычаг 111 с паллетами передает импульс через анкерное колесо 400 и за счет энергии аккумулированной в гибких пластинах 113.
Система имеет все те же предохранительные устройства, что и анкерный механизм со швейцарским рычагом.
Для варианта, показанного на Фиг. 1-10, имеет место следующая кинематика. Фиг. 1: размыкание. Баланс поворачивается по часовой стрелке. Зуб 118С, который был в зацеплении с фиксирующим зубцом 119С, начинает выходить из зацепления с указанным зубцом при поступательном перемещении в левую сторону подвижной рамы 111 вдоль оси X фигуры. В начале размыкания рама находится около крайнего положения своего хода в положительном направлении оси X.
Фиг. 2: начало импульса. Зуб 118С полностью вышел из зацепления, анкерное колесо 400 совершает вращение, выступ 115 сообщает импульс импульсному камню 117, подвижная рама вернулась вдоль оси X по действием импульса, полученного от зуба 118В зубцом 119В.
Фиг. 3: конец передачи импульса. Имеющие два положения равновесия пластины 113 только что прошли два устойчивых положения. Подвижная рама 111 завершила ход в отрицательном направлении оси X под действием упругого возврата пластин 113 и находится в крайней точки хода в отрицательном направлении оси X.
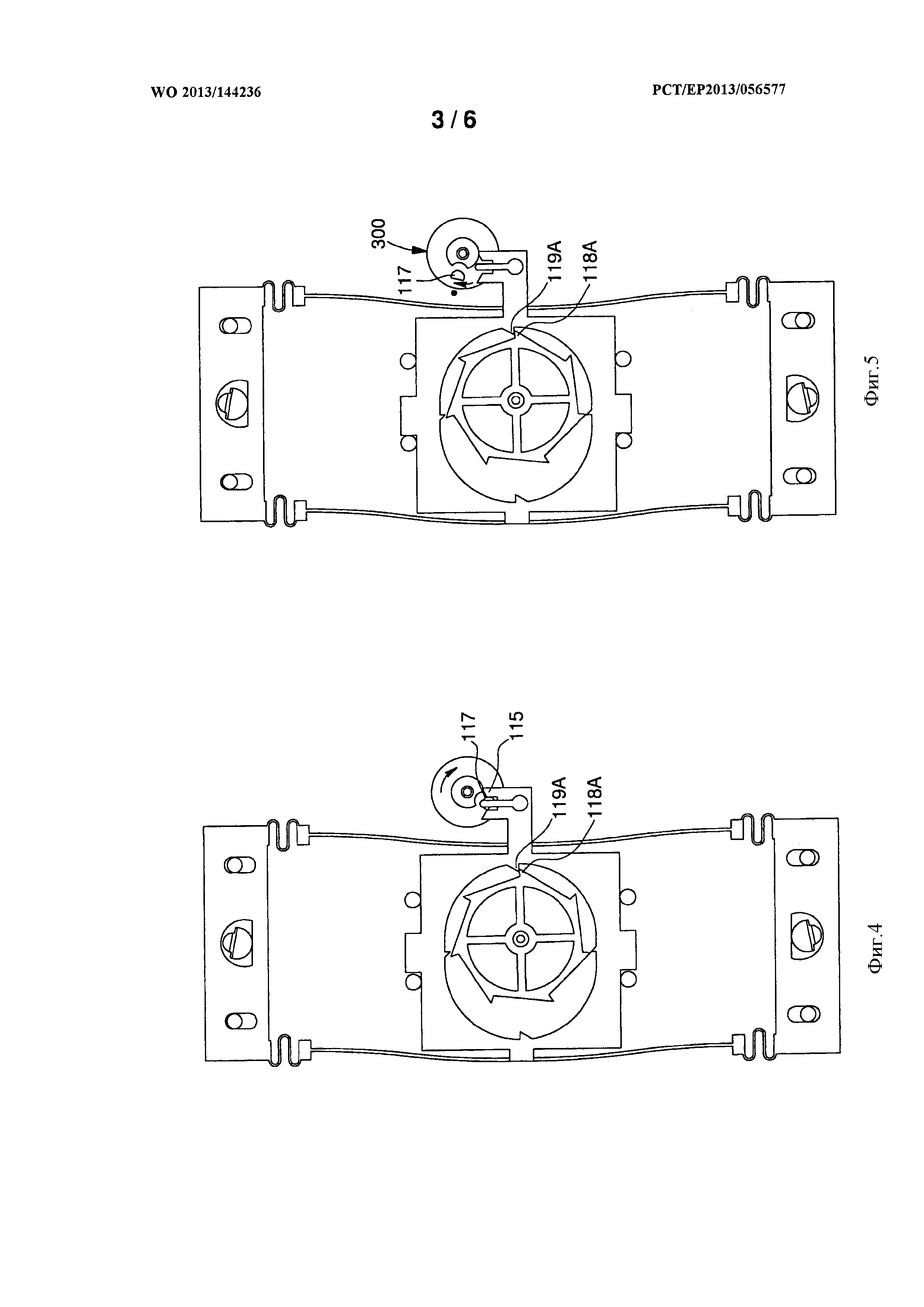
Фиг. 4: фиксирующее зацепление. Зуб 118А зацепляется с фиксирующим зубцом 119А.
Фиг. 5: полная фиксация. Зуб 118А находится в зацеплении с фиксирующим зубцом 119А. Баланс 300 описывает дополнительную дугу и приходит в точку обращения.
Фиг. 6: размыкание. Баланс 300 поворачивается против часовой стрелки. Камень 117 вновь входит во взаимодействие с выступами 115 для перемещения подвижной рамы 111 на расстояние в положительном направлении оси X, достаточное для вывода зуба 118А из зацепления с зубцом 119А.
Фиг. 7: начало импульса. Зуб 118А выходит из зацепления с зубцом 119А. Происходит поворот колеса 118. Подвижная рама 111 продолжает перемещение в положительном направлении оси X за счет воздействия на зубец 119D на зуба 118D.
Фиг. 8: конец передачи импульса. Имеющие два положения равновесия пластины 113 только что прошли два устойчивых положения. Подвижная пластина 111 завершила ход вдоль положительного направления оси X и находится в крайней точки хода в положительном направлении оси X. Зуб 118С приближается к фиксирующему зубцу 119С.
Фиг. 9: фиксирующее зацепление. Зуб 118С упирается в фиксирующий зубец 119С.
Фиг. 10: полная фиксация. Зуб 118С находится в зацеплении с фиксирующим зубцом 119С. Баланс 300 описывает дополнительную дугу и приходит в точку обращения.
Цикл продолжается так же, как и на Фиг. 1, но, безусловно, для других зубьев анкерного колеса.
Предпочтительно в этом варианте на Фиг. 1-10 сила, создаваемая нагруженными пружинами 12, на 10-15% больше максимальной нагрузки, при которой происходит потеря устойчивости гибких пластин 113, для обеспечения упора граней 11 рамы 111 в ограничивающие упорные элементы 12.
Сила этих нагруженных пружин также имеет верхний предел, обеспечивающий самозапуск, и этот предел является функцией инерции балансира.
Фиксирующий механизм, показанный здесь, имеет один уровень. Также возможно изготовление механизма на нескольких уровнях, в частности, с расположением зубцов (импульсных и фиксирующих) на разных уровнях.
В конкретном варианте осуществления изобретения для баланса, колеблющегося с частотой 4 Гц, и силиконового фиксирующего механизма 500 данного типа с высотой пластины 0.15 мм, ходом фиксирующего рычага +/- 0.35 мм и полной фиксацией 0.05 мм, правильное функционирование, которое также обеспечивает самозапуск, достигается при следующих различных конфигурациях:
- момент инерции баланса 4 мг⋅см2; длина гибкой пластины 5.0 мм; толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 6.9 мН; момент инерции баланса 9 мг⋅см2; длина гибкой пластины 5.0 мм;
- толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 6.9 мН;
- момент инерции баланса 9 мг⋅см2;
- длина гибкой пластины 5.0 мм;
- толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 7,2 мН;
. момент инерции баланса 4 мг⋅см2; длина гибкой пластины 1.7 мм;
- толщина пластины 0.01 мм, критическая нагрузка, вызывающая потерю устойчивости, 6.2 мН, нагрузка пружины 7.2 мН.
Изобретение также относится к часовому механизму 900, включающему по меньшей мере один гибкий механизм данного типа и, в частности, включающему неподвижную структуру 800 и по меньшей мере один механизм 100 данного типа.
Изобретение также относится к часам 1000, в частности к наручным часам, включающим по меньшей мере один часовой механизм 900 данного типа и/или один гибкий механизм данного типа, в частности включающий неподвижную структуру 800 и по меньшей мере один механизм 100 данного типа.
Реферат
Анкерный механизм (100) для часового механизма (900) или часов (1000), включающий по меньшей мере один баланс (300) и по меньшей мере одно анкерное колесо (400). Передача импульсов между балансом (300) и анкерным колесом (400) осуществляется при помощи гибкого механизма (500) из единой детали, включающего по меньшей мере один контактный шпиндель (600), взаимодействующий с указанным анкерным колесом (400) или соответственно с указанным балансом (300), при этом указанный состоящий из единой детали гибкий механизм (500) соединен по меньшей мере одной гибкой пластиной (700) с неподвижной структурой (800) указанных часов (1000), либо соответственно с указанным по меньшей мере одним анкерным колесом (400). 3 н. и 8 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Регулирующий элемент для наручных часов и часовой механизм, который содержит один такой регулирующий элемент
Комментарии