Электронный часовой механизм - SU536763A3
Код документа: SU536763A3
Чертежи
Описание
1
Изобретение относится к часовому производству и может быть применено в часовой промышленное ти.
Известен электронный часовой механизм, содержащий генератор электрических импупь сов заданной частоты, электронный преобразователь , управляемый импульсами, ходовой механизм в виде качающегося анкера с двумя палетами и двумя крайними положениями , индикатор, управляемый папетами и зу бьями зубчатого колеса.
К недостаткам известного механизма можно отнести низкий к.п.д. системы передачи энергии и влияние внешних факторов на ход часов.
Цель изобретения - обеспечение мгновенной и полной передачи энергии анкера зубчатому колесу посредством удара независимо от внешних влияний.
Поставленная цель достигается тем, что анкер установпенамеханически независимо от генератора импульсов, причем плоскости палет и зубьев составляют в рабочем положении угол 45° по отношению к касательной зубчатого колеса.
Кроме того, отношение моментов инерци ходового механизма и индикатора пропорционально квадрату отношения расстояния между центром качания анкера и любой точкой касания анкера к расстоянию между центром вращения зубчатого колеса и передней стороною зубца.
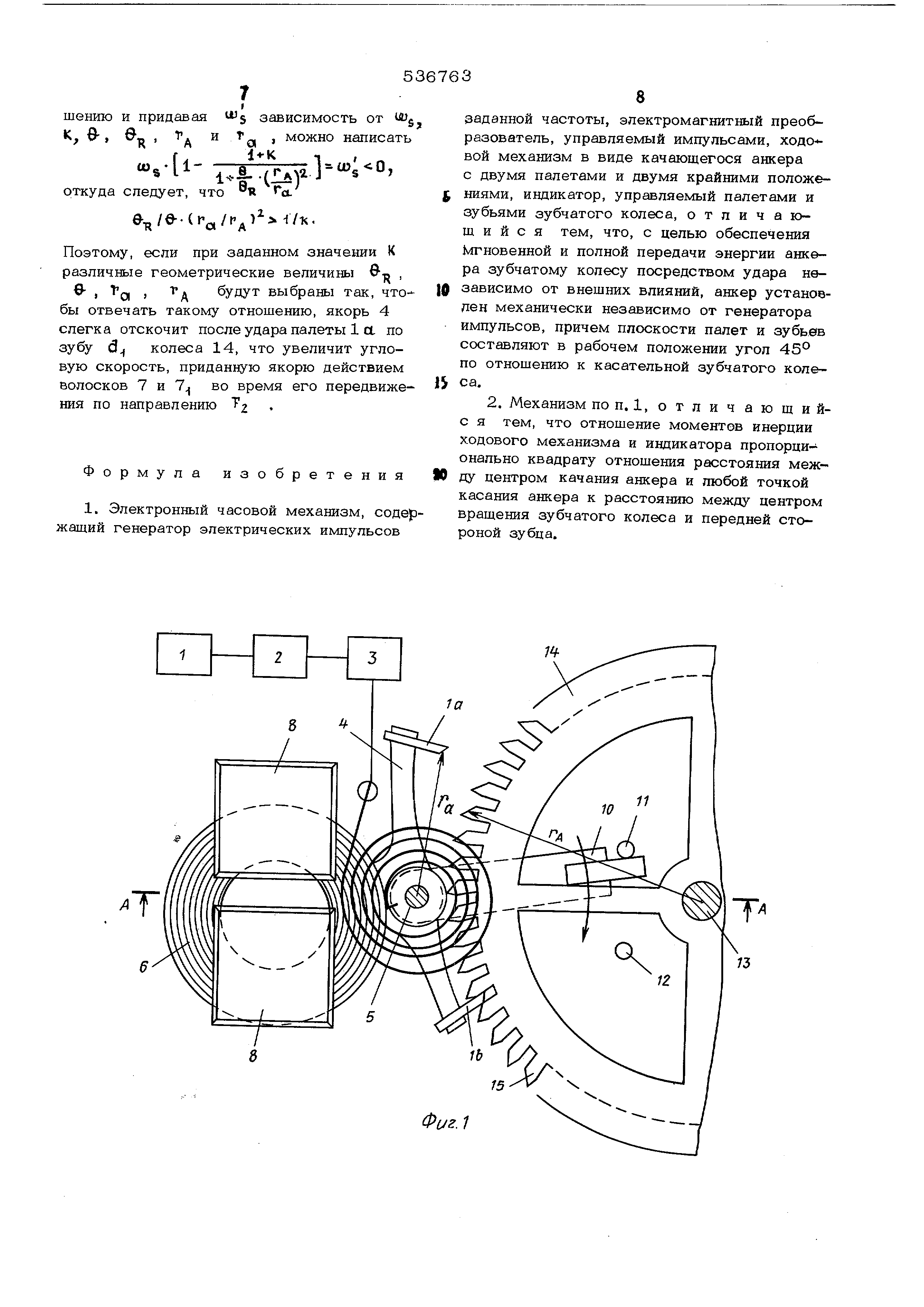
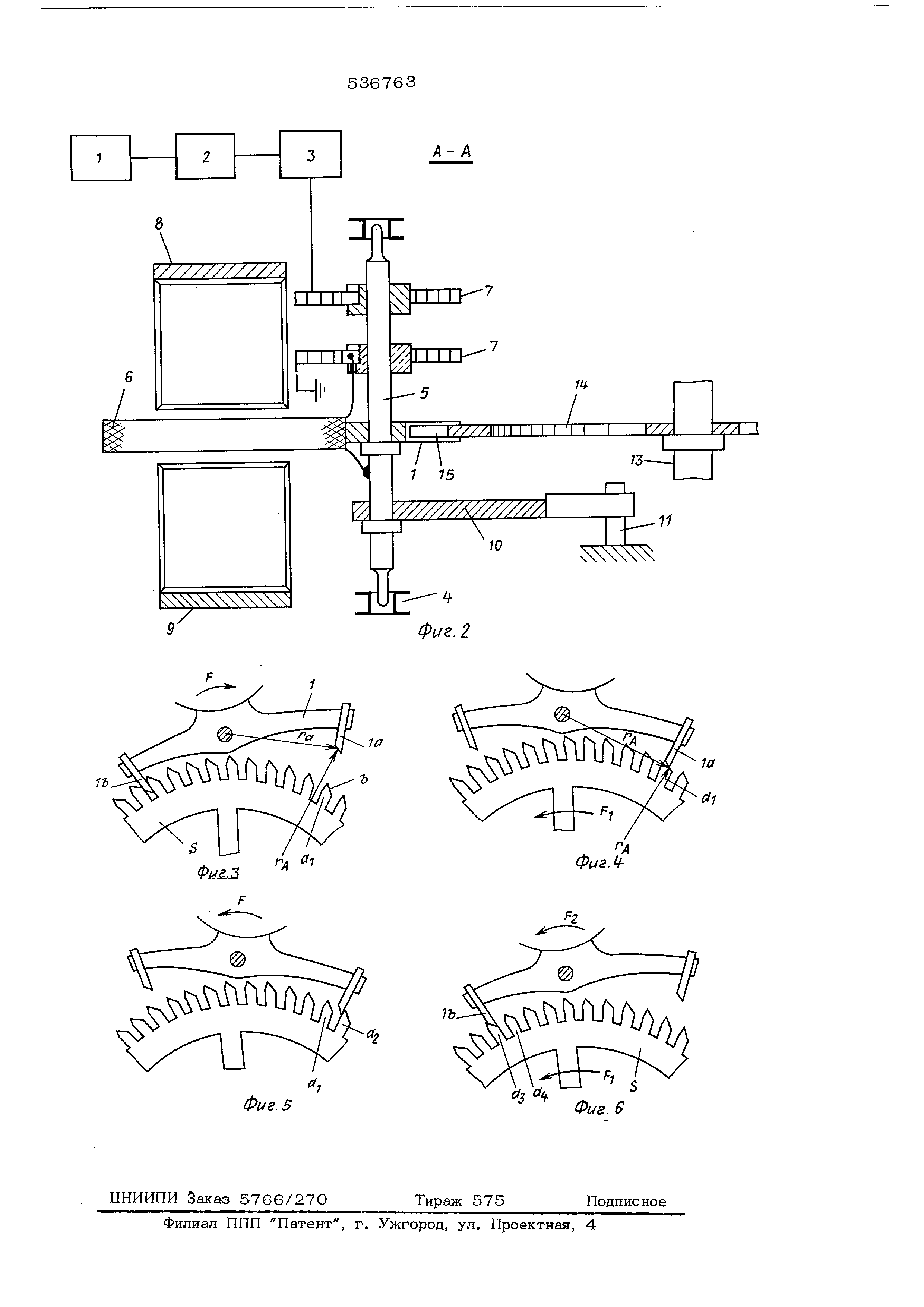
На фиг, 1 и 2 схематично изображен предлагаемый механизм в целом; на фиг.З, 6 - электромеханическая часть механизма последовательно в рабочих фазах.
Механизм содержит генератор высокой точности 1, связанный через электронный делитель 2 и схему 3 с электромеханическим преобразователем, который, в свою очередь , содержит подвижный магнитный якорь 4 в виде часового анкера с палетами 1 Ои It), закрепленного на оси 5. На свободном конце анкера закреплена плоская элект-рическая катушка 6, соединенная с источником импульсов через спиральные волоски 7 и 7 , закрученные в противоположных направлениях на оси 5 анкера. Катушка 6 расположена между открытыми торцами двух V-образных постоянных магнитов 8 и 9. Анкер снабжен плечом 10, свободный конец которого расположен между двумя упорами 11 и 12. В плоскости анкера-якоря 4 на ,оси 13 установлено зубчатое колесо 14 ко лесного механизма часов с зубьями 15, плоскости которых во взаимодействии с плос костью палета анкера составляют угол 45° по отношению к касательной колеса. Положе ние центра вращения преобразователя палета вокруг оси якоря 4, длина плеч этого якоря, несущих палеты la. и 16, и угловое положение каждой палеты выбраны так, что палеты в момент ударного взаимодействия обращены к центру вращения колеса. Механизм работает следующим образом. С генератора 1 на электронный делитель 2 поступает периодический высокочастотный сигнал, который преобразуется, например, вплоть до величины 1 Гц, и через схему 3, управляемую этим делителем, поступает на катушку 6, приводя в движение электромеханический преобразователь, в частности пв лета 1а и l6 анкера посредством которых путем кратковременного или ударного поочередного взаимодействия каждой с зубьями колеса 14 приводится в движение колесный механизм. Производительность для сдвига колесного механизма посредством ударного воздействия на зубья колеса можно определить как отношение кинетической энергии, накопленной колесным механизмом и указательными стрелками детали часового механизма после удара, к кинематической энергии подвиж ной части электромеханического преобразов теля до этого удара. где в - момент инерции подвижной части преобразователя, т.е. всего узла, со тоящего из оси 5, муфт, волосков 7 и 7 , якоря 4 и катущки 6- угловая скорость этого узла при ударе палеты la.no одному из зубьев колеса 14; 0 - величина момента инерции колесного механизма и указательных стрелок в центре вращения секун I ного колеса 14; угловая скорость, с которой вращается колесо 14 по получении удара палеты преобразователя. Если удар каждой палеты якоря, падающ на зубья колеса, имеет место в то время, когда полета движется по направлению к центру вращения колеса, как описано выше, и если ударная поверхность палет и зубья колеса выполнены по описанному выше профилю , так, чтобы в общей плоскости с укло ном 45 по отношению к касательной, взятой в точке удара, к круговой траектории ударной зоны каждого зуба, то формулу производительности можно также написать следующим образом: -П (-1 1 )VcVe7e - ( Рд / Гд ) т 1 /Ve/eT- ( Г . / fg, ) К - так называемый коэффициент от дачи, значение которого может находиться в пределах от О до 1 и который определяется отношением скорости, набранной органом из определенного материала после его падения на стационарную опору, также выполненную из определенного материала, не обязательно аналогично предыдущему, к скорости, которой обладал тот же самый орган до его падения на опору; а - радиус ударного движения ведущего органа, т.е. расстояние от центра осевого вращения якоря 1 до ударной поверхности той или другой палеты; Г, - радиус ударного движения, воспринимаемого ведомым органом,т.е. расстояние от центра вращения секундного колеса до поверхности каждого зуба, воспринявшей удар; Э- и 0- - имеют то же значение, как указано выше. При заданном значении К , производительность максимальна, когда (fA/ra)lHAM-&/e,, (- /f) т.е., когда моменты инерции взаимодействующих органов находятся в отношении как квадраты соответственных радиусов ударного движения этих подвижных органов. Поскольку в данном случае скорости Ои,, и с, относительно малы и учитывая мате риалы, используемые для выполнения органов , непосредственно взаимодействующих во время удара, коэффициент передачи К можно получить со значением, близким к 1, а это означает, что произведенный удар обладает исключительной эластичностью. Из приведенной выше формулы производительности вытекает, что при Ч-а производительность эта может достигнуть значений, близких к единице. Для того, чтобы все же при передаче энергии ударом одной подвижной части по другой не происходило никакого трения между ними, особенно после удара, надо, чтобы скорость ударной подвижной части после удаpa стала нулевой или отрицательной по отн шению к той скорости, которой обладала эт часть до удара. Что касается якоря 4, производящего удар по колесу 14 передвижением своих па лет в радиальном направлении по отношению к этому колесу, то угловая скорость всего узла после удара одной из налет 1а или 1в якоря по одному из зубьев колеса 9 , выражается отношением где - угловая скорость этого узла до удара, а в, -&-д , ( , имеют то же значение, что и выше (5 0, это отношение станоЕсли вится следующим; . отсюда /0 e /e-cc i/V / Если одну или другую из этих величин представить в уравнение производительности Л , указанное выше, в зависимости от К , Q- , TO, и Рд , то станет очеви ным, что при приведении в неподвижность узла подвижных элементов электромеханического преобразователя после удара( производительность, с которой может проис ходить передача энергии, должна составля Л к. Когда электромеханический преобразователь находится в состоянии покоя, его якор 4 занимает положение, изображенное на фиг. и 3: налета 1 & этого якоря находится тогда между двумя зубьями колеса 14 и блокирует ко лесо 14 в угловом положении, равно как и весь колесный механизм делителя часового устройства . Как только на катушку 6 поступает импульс от схемы 3, движение якоря ускоряется в направлении f до тех пор, пока ударная плоскость О палеты 1 а не столк нется с принимающей удар плоскостью t) зу ба 3. , колеса 14 (см. фиг. 4). В резуль тате наибольшая часть кинетической энерги накопленной в подвижных элементах преобразователя , передается колесу 14, которое пер двигается тогда по направлению Т до тех пор, пока зуб d , следующий непосредственно за воспринявшим удар зубом d, не столкнется с палетой 1й В этот момент положение этой палеты определяется столкновением ограничивающего плеча 10 (см. фиг. 1) с упором 12. 6Йй Волоски 7 и 7 натянуты максимально и подчиняют якорь 4 возвратному действию В направлении Т , в связи с чем якорь вновь опрокидывается влево по рисунку до тех пор, пока палета 6 не ударит по зубу dj. Причем тогда колесу 34 передается ударом новое количество кинетической энергии , которая ведет его по направлению Т до тех пор, пока палета 1 Ь не попадает в пространство, отделяющее зуб dj от следующего зуба йд. После этого ограничивающее плечо 10 начинает опираться на упор 11. Описанная операция возобновляется при поступлении на преобразователь нового электрического импульса, и так далее. Следует, в частности, отметить, что скорость Ujg возрастает до максимума ш , пока длится импульс, и падает внезапно на нуль в момент t , когда совершается удар палетой let причем, начиная с этого момента, приводится в действие колесо 14, а якорь и колесо занимают тогда положение, указанное на фиг. 4. Колесо передвигается на угловую длину 4 до момента t j. т.е. до момента, когда зуб d 2, , следуя за только что принявшим удар зубом, входит в соприкосновение с палетой 1 а якоря 4 (см. фиг. 5), которая начинает передвигаться в направлении Р под действием пружинных волосков 7 и 7, . Скорость якоря , ставшая почти нулевой мех-еду моментами i и tj и возросшая до значения UUj. , внезапно понижается до Ш в момент t; , когда палета 1 Б якоря ударяет по зубу (3 J колеса 14 (см; фиг. 6). Начиная с этого момента t, колесо 14 вновь начинает двигаться, пробегая угловое расстояние , равное Ча. -1 причем Ф соответствует одному зубцовому шагу, до тех пор пока зуб dj. этого колеса не столкнется с палетой 1 6 якоря (момент t ), попавшей в пространство, отделяющее зубья d 5 и dj . Исключения возможности блокировки или проскакивания колеса можно добиться при использовании преобразователя, сходного с изображенным на фиг, 1 и 2, в частности , в отношении общей формулы его элементов , в том числе налет 1а.и 1б и зубьев колеса 14, а также в отношении способа питания периодическими импульсами i , если подвижным органом преобразователя и колесному механизму будут приданы такие размеры, чтобы скорость Ш якоря после удара была не нулевой, а слегка отрицательной по сравнению со скоростью Ui до удара. Возвращаясь к ранее приведенному зависимость от w
шению и придавая
К, . е, Гд и т , можно написать
ч-(1- /14 .«II
(О. „- iг I-
BR
откуда следует, что R .
(Га/гд)1/к.
Поэтому, если при заданном значении К различные геометрические величины в ,
0- , Гд , f д будут выбраны так, чтобы отвечать такому отношению, якорь 4 слегка отскочит после удара налеты 1 ct по зубу d колеса 14, что увеличит угловую скорость, приданную якорю действием волосков 7 и 7 во время его передвижения по направлению z
Формула изобретения
1. Электронный часовой механизм, содержащий генератор электрических импульсов
заданной частоты, электромагнитный преобразователь , управляемый импульсами, ходо вой механизм в виде качающегося анкера с двумя налетами и двумя крайними положениями , индикатор, управляемый палетами и зубьями зубчатого колеса, о т л и ч а юш и и с я тем, что, с целью обеспечения Мгновенной и полной передачи энергии анкера зубчатому колесу посредством удара нвзависимо от внешних влияний, анкер установлен механически независимо от генератора импульсов, причем плоскости налет и зубьев составляют в рабочем положении угол 45° по отношению к касательной зубчатого колеса .
2. Механизм поп. 1, отлич ающийс я тем, что отношение моментов инерции ходового механизма и индикатора пропорционально квадрату отношения расстояния между центром качания анкера и любой точкой касания анкера к расстоянию между центром вращения зубчатого колеса и передней стороной зубца.

Реферат
Формула
Комментарии