Устройство "роботизированная рука" - RU2541754C2
Код документа: RU2541754C2
Чертежи










Описание
Область техники
Настоящее изобретение относится к устройствам для лечения переломов и, в частности, относится к устройствам для репозиции и/или удерживания обломков кости.
Уровень техники
Переломы костей могут с трудом поддаваться лечению из-за смещения обломков кости. Кость связана с мышцами, сухожилиями и связками, которые часто сдвигают и располагают кость под углом, вызывая смещение с места обломков кости. Таким образом, положение обломков кости должно быть восстановлено для достижения репозиции. Восстановление может потребовать вытяжения и коррекции сдвигов и угловых смещений путем приложения усилий. Например, хирург или другой медицинский работник может физически потянуть ступню или ногу пациента, чтобы вправить кость. После достижения должной репозиции, обломки кости необходимо удерживать в нужном положении до тех пор, пока не будут применены средства фиксации с целью предотвращения повторного смещения. Однако может быть затруднительно получить и поддерживать необходимое усилие и направление его приложения, которые требуются для коррекции смещения кости. Существующие способы не позволяют рассчитывать или контролировать усилие, направление и скорость процесса.
Сущность изобретения
Настоящее изобретение относится к устройству для лечения переломов кости, которое содержит множество рычагов, каждый из которых отходит от проксимального конца к дистальному концу и способен двигаться в трехмерном пространстве, причем проксимальный конец каждого рычага соединен с рамой; множество элементов сочленения, причем каждый из элементов сочленения соединен с дистальным концом соответствующего рычага, где элемент сочленения вмещает с возможностью блокировки элемент фиксации кости, прикрепленный к соответствующему обломку кости таким образом, что каждый из рычагов соединен с соответствующим обломком кости; механическое устройство, обуславливающее движение рычагов для перемещения каждого из рычагов относительно рамы; контроллер, получающий данные, соответствующие желательному окончательному положению обломков кости относительно друг друга, и управляющий механическим устройством для передвижения рычагов относительно друг друга для достижения желаемого окончательного положения обломков кости относительно друг друга; и раму, включающую продольный элемент, к которому присоединено множество рычагов, причем продольный элемент выполнен с возможностью вращения для того, чтобы вращать множество рычагов относительно рамы. Каждый из рычагов включает в себя первое плечо и второе плечо, соединенные между собой с возможностью вращения для того, чтобы поворачиваться вокруг первой оси, причем проксимальный конец каждого из рычагов соединен с возможностью вращения с указанной рамой так, что каждый из рычагов способен поворачиваться вокруг второй оси.
Предпочтительно рычаги выполнены подвижными вдоль продольного элемента по третьей оси.
Устройство согласно изобретению может содержать первый участок запястного шарнира между дистальным концом первого из рычагов и первого из элементов сочленения, причем первый участок запястного шарнира позволяет первому элементу сочленения вращаться относительно дистального конца второго плеча первого рычага. При этом первый участок запястного шарнира включает в себя первую пластину, прикрепленную к проксимальному концу первого элемента сочленения, и первый штифт, проходящий через первый рычаг, причем первый штифт прикреплен с возможностью вращения к первой пластине с целью дать возможность первому элементу сочленения и первой пластине поворачиваться вокруг него.
Механическое устройство предпочтительно включает в себя множество первых гидравлических цилиндров, причем каждый из первых гидравлических цилиндров прикреплен к проксимальной поверхности первой пластины для того, чтобы вращать первую пластину вокруг первого штифта, где первые гидравлические цилиндры расположены, по существу, на равном удалении друг от друга по периметру первой пластины. При этом каждый из первых гидравлических цилиндров соединен с первым рычагом посредством первого натяжного элемента, который, при втягивании его в первый гидравлический цилиндр, перемещает первый рычаг в желательное положение.
Каждый из рычагов может содержать кодирующее устройство, доставляющее в контроллер информацию, которая согласуется с положением соответствующего фрагмента кости.
Предпочтительно по меньшей мере, один из элементов сочленения выполнен с возможностью соединения с несущей конструкцией, приспособленной поддерживать участок концевой части кости.
Предложен также способ для лечения переломов кости, включающий в себя:
крепление первого фрагмента кости к первому элементу фиксации кости и второго фрагмента кости ко второму элементу фиксации кости;
соединение дистального конца первого рычага с первым элементом фиксации кости и дистального конца второго рычага со вторым элементом фиксации кости, причем каждый из первого и второго рычагов проходит между дистальным концом и проксимальным концом, соединенным с рамой, при этом рама включает продольный элемент, к которому присоединено множество рычагов, причем продольный элемент выполнен с возможностью вращения для того, чтобы вращать первый и второй рычаги относительно рамы;
получение данных, соответствующих желаемому окончательному положению первого и второго фрагментов кости относительно друг друга; и
управление механическим устройством с целью перемещения первого и второго рычагов относительно друг друга для достижения желательного окончательного положения фрагментов кости.
Предпочтительно способ включает в себя передвижение первого и второго рычагов в продольном направлении вдоль рамы и определение положения каждого из фрагментов кости на основании данных, полученных от кодирующих устройств, прикрепленных к каждому из первого и второго рычагов.
Способ также может включать визуализацию фрагментов кости с помощью устройства отображения с целью определения желаемого пространственного расположения фрагментов кости.
В способе согласно изобретению данные, соответствующие желательному окончательному положению первого и второго фрагментов кости относительно друг друга, вводятся пользователем в контроллер, который управляет первым и вторым рычагами для получения желаемого пространственного расположения.
Предпочтительно данные, соответствующие желательному окончательному положению первого и второго фрагментов кости относительно друг друга, вводятся пользователем путем манипулирования ручками управления, направляя движение первого и второго фрагментов кости относительно друг друга, поскольку они передвигаются контроллером, который управляет первым и вторым рычагами, двигающими первый и второй фрагменты кости, как задано пользователем, для получения желаемого пространственного расположения.
Способ может включать в себя расположение концевой части первого и второго фрагментов кости посредством несущей конструкции, которая поддерживает участок концевой части, причем несущая конструкция выполнена с возможностью перемещения с помощью третьего рычага, который присоединяют к несущей конструкции.
Предпочтительно первый и второй рычаги содержат первый и второй участки запястного шарнира, соответственно, и первый и второй элементы сочленения, соответственно, приспособлены сцепляться с возможностью блокировки с соответствующим первым или вторым элементом фиксации кости, причем первый участок запястного шарнира прикреплен к дистальному концу первого рычага, соединяя с возможностью вращения первый элемент сочленения с дистальным концом первого рычага, и второй участок запястного шарнира прикреплен к дистальному концу второго рычага, соединяя с возможностью вращения второй элемент сочленения с дистальным концом второго рычага.
При этом первый рычаг может включать в себя первую пластину, прикрепленную с возможностью вращения к проксимальному концу первого элемента сочленения с целью вращения вокруг первого штифта, проходящего через первый рычаг, а второй рычаг включает в себя вторую пластину, прикрепленную с возможностью вращения к проксимальному концу второго элемента сочленения с целью вращения вокруг второго штифта, проходящего через второй рычаг.
Кроме того, механическое устройство может включать в себя множество первых гидравлических цилиндров, причем каждый из первых гидравлических цилиндров прикреплен к проксимальной поверхности первой пластины для того, чтобы вращать первую пластину вокруг первого штифта, и множество вторых гидравлических цилиндров, причем каждый из вторых гидравлических цилиндров прикреплен к проксимальной поверхности второй пластины для того, чтобы вращать вторую пластину вокруг второго штифта.
Краткое описание чертежей
На Фиг. 1 представлен схематический вид системы, в соответствии с примерным вариантом осуществления настоящего изобретения;
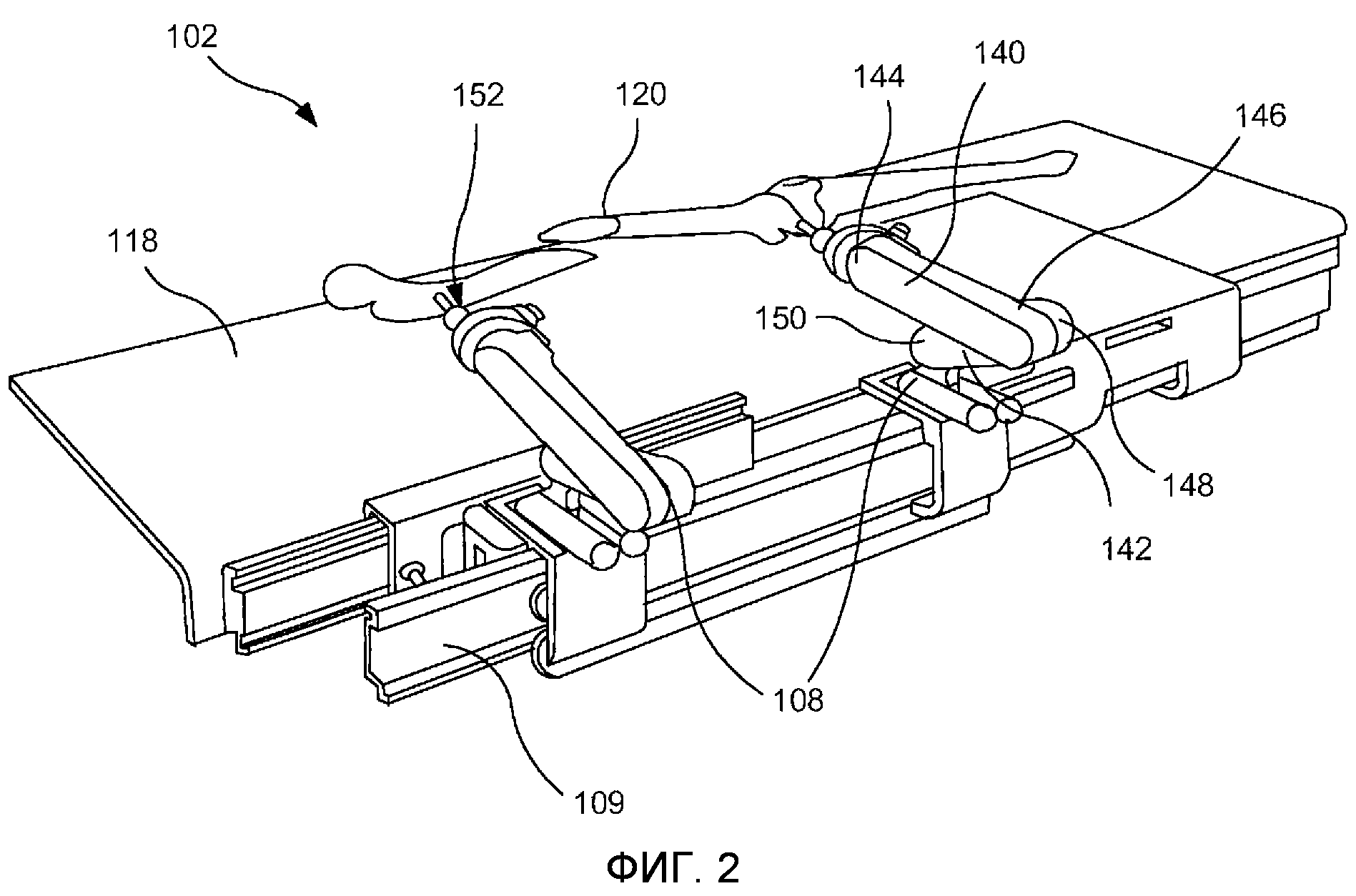
Фиг. 2 иллюстрирует вид в перспективе роботизированного устройства системы, представленной на Фиг. 1;
Фиг. 3 иллюстрирует вид в перспективе участка запястного шарнира роботизированного устройства, представленного на Фиг. 1, в первой конфигурации;
Фиг. 4 иллюстрирует вид в перспективе участка запястного шарнира, представленного на Фиг. 3, во второй конфигурации;
на Фиг. 5 представлен увеличенный вид в перспективе дистального конца участка запястного шарнира, представленного на Фиг. 3;
на Фиг. 6 представлен цилиндрический узел участка запястного шарнира, представленного на Фиг. 3;
Фиг. 7 иллюстрирует схематическое изображение гидравлического блока системы, представленной на Фиг. 1;
Фиг. 8 иллюстрирует схематическое изображение альтернативного варианта осуществления гидравлического блока, представленного на Фиг. 7;
Фиг. 9 иллюстрирует вид в перспективе роботизированного устройства, представленного на Фиг. 2, в котором соединительные элементы соединены с обломками кости;
на Фиг. 10 представлен вид в перспективе роботизированного устройства, представленного на Фиг. 2, соединенного с соединительным элементом, вставленным в участок кости, подвергшейся перелому;
Фиг. 11 иллюстрирует вид в перспективе роботизированного устройства, представленного на Фиг. 2, передвигающего обломки кости с целью репозиции;
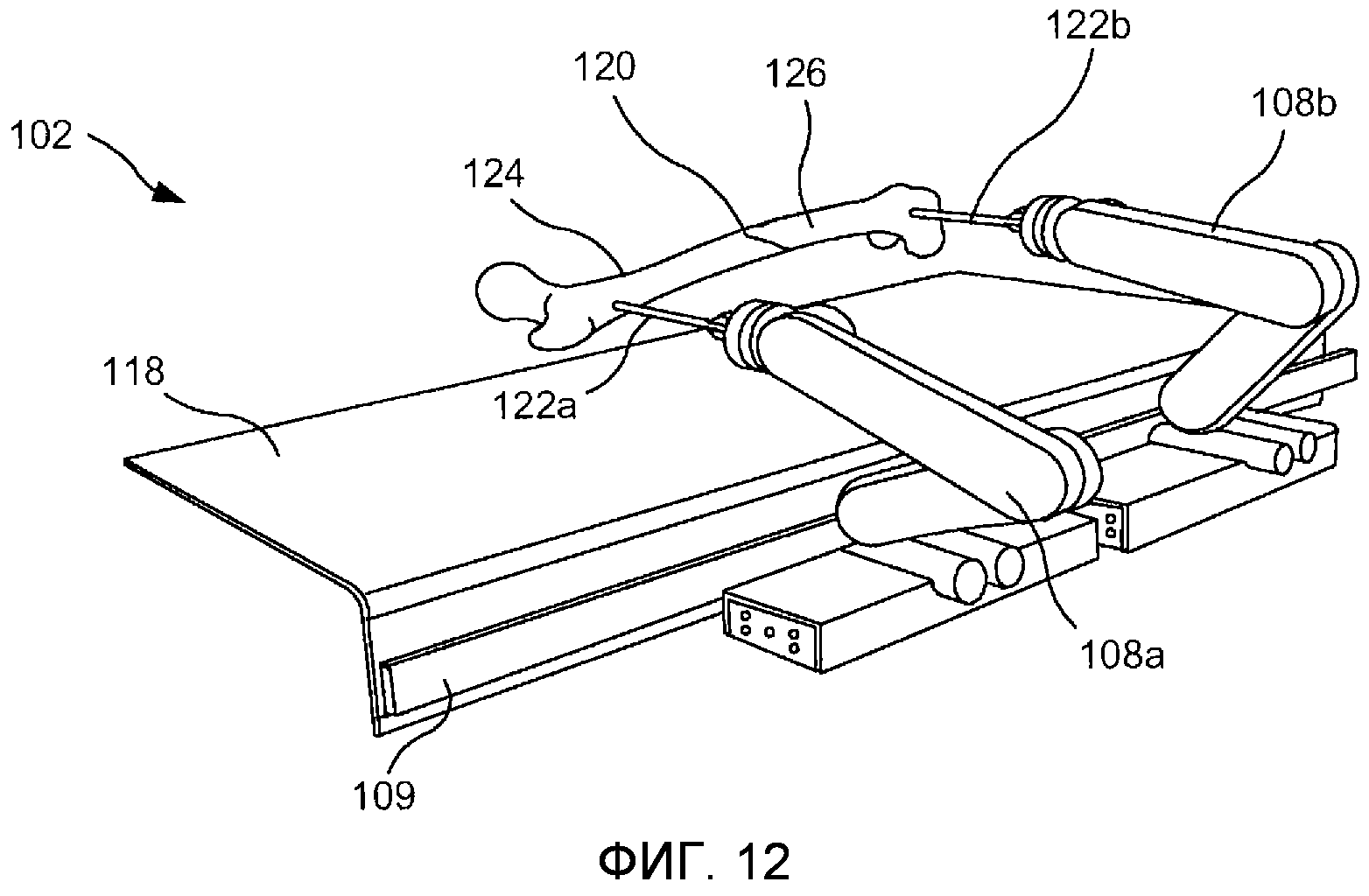
Фиг. 12 иллюстрирует вид в перспективе роботизированного устройства, представленного на Фиг. 2, выполнившего репозицию обломков кости; и
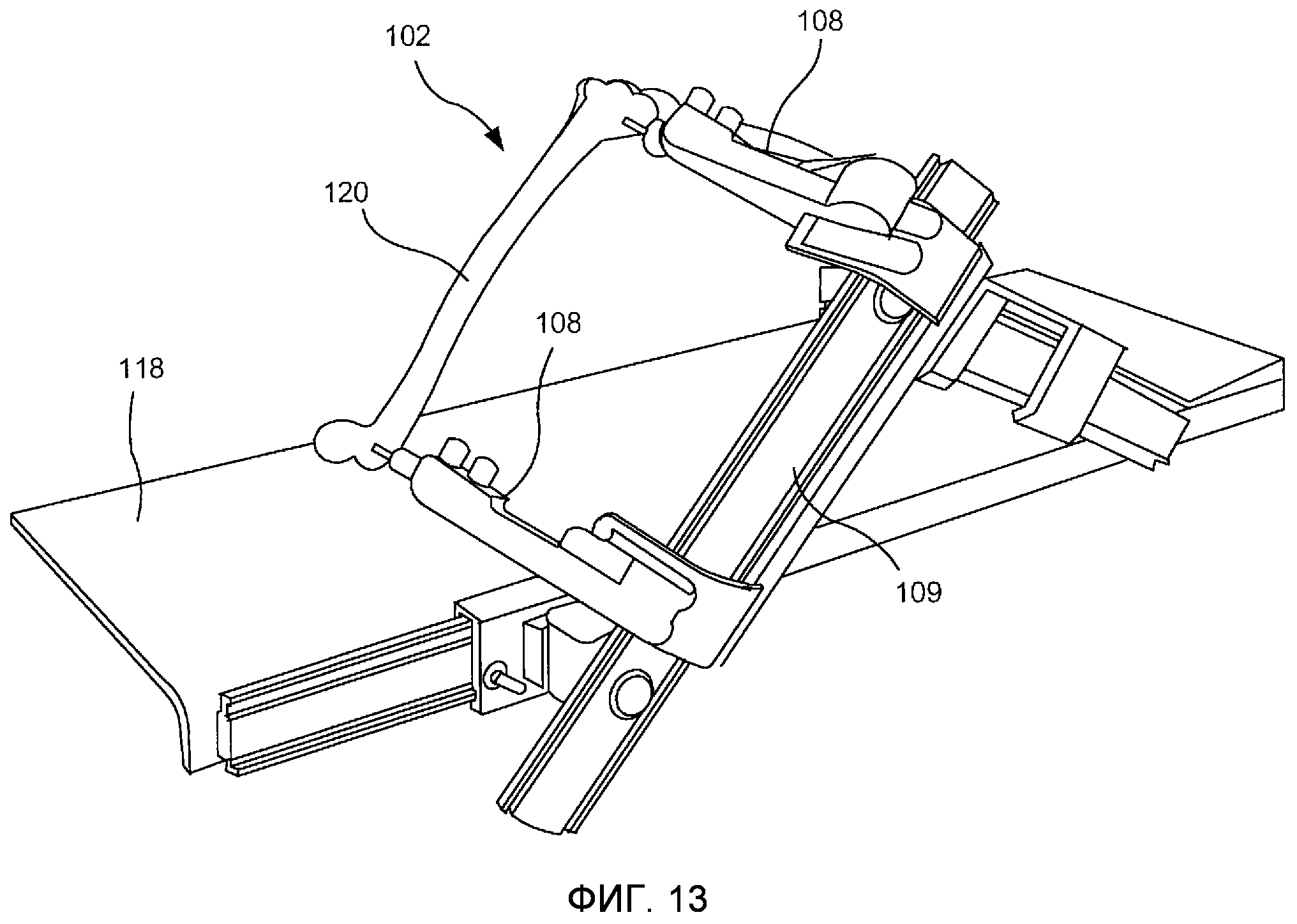
Фиг. 13 иллюстрирует вид в перспективе роботизированного устройства, представленного на Фиг. 2, поддерживающего вправленные обломки кости для фиксации.
Подробное описание
Настоящее изобретение может рассматриваться в дальнейшем с учетом нижеследующего описания и прилагаемых чертежей, в которых аналогичные элементы обозначены одними и теми же номерами позиций. Настоящее изобретение относится к устройствам для лечения переломов и, в частности, относится к устройствам для репозиции и/или удерживания обломков кости. Примерные варианты осуществления настоящего изобретения предлагают устройство, содержащее роботизированные рычаги, которые могут быть присоединены к кости, подвергшейся перелому, для перемещения кости по всем необходимым осям для выполнения репозиции обломков кости для фиксации.
Как представлено на Фиг.1-13, система 100, в соответствии с одним примерным вариантом осуществления данного изобретения, содержит роботизированное устройство 102 для перемещения обломков кости 120 в необходимое пространственное расположение относительно друг друга. Как иллюстрирует Фиг.1, роботизированное устройство 102 имеет возможность присоединяться к источнику 104 питания, управляемому посредством интерфейса 106 пользователя. Роботизированное устройство 102 также может включать в себя блок 110 управления, который обрабатывает входной сигнал, поступающий от интерфейса 106 пользователя для того, чтобы управлять движением множества рычагов 108 посредством, например, гидравлических усилий, обеспечиваемых жидкостным опрессовочно-нагнетательным аппаратом, таким как гидравлический блок 112. В качестве альтернативы, рычаги 108 могут двигаться с помощью одного или нескольких серводвигателей (не показаны), соединенных с ними посредством любого известного механизма зубчатого зацепления, как будет очевидно специалистам в данной области. Каждый из рычагов 108 может быть соединен с заданным участком кости 120, подвергшейся перелому, так, чтобы движение рычагов 108 осуществляло репозицию обломков кости, в соответствии с необходимостью. Каждый из рычагов 108 может быть оборудован кодирующим устройством 116, способным точно определять положение рычага 108 так, что положения обломков кости 120 можно тщательно отслеживать и располагать, в соответствии с необходимостью.
Источником 104 питания может быть любой источник питания, находящийся в операционной. Например, источником 104 питания может быть любой источник электрической энергии, включая батарейное электропитание. Источник 104 питания может использоваться для снабжения энергией гидравлического блока 112 для продвижения гидравлической текучей среды через роботизированное устройство 102. Специалисту в данной области техники очевидно, что гидравлической текучей средой может быть любая подходящая несжимаемая жидкость, такая как, например, минеральное масло или солевой раствор. В другом варианте осуществления система 100 может использовать сжимаемую текучую среду для жидкостной или пневматической системы 100. Инструкции по перемещению рычагов 108 могут быть введены посредством интерфейса 106 пользователя и обработаны блоком 110 управления с целью контроля гидравлического блока 112 таким способом, который требуется для достижения желательного движения, указанного пользователем, как очевидно специалисту в данной области техники. Интерфейс 106 пользователя может представлять собой простое устройство в виде переключателя и/или ручки управления для приведения в действие роботизированного устройства 102 и руководства движением рычагов 108. В предпочтительном варианте осуществления, однако, интерфейс 106 пользователя может являться персональным компьютером или другим устройством обработки, которое может использоваться для ввода указаний движения для каждого из рычагов 108 и также может позволить пользователю устанавливать скорость движения одного или более рычагов. Например, пользователь может иметь возможность задавать вершинные точки для участков кости 120 и дополнительные целевые точки, в которые требуется переместить участки кости 120.
В соответствии с дальнейшим вариантом осуществления, система 100 также может включать в себя устройство 114 отображения для визуализации различных фрагментов кости 120 таким образом, чтобы обломки кости изображались на экране устройства отображения. Система 100 может быть выполнена с возможностью определения положения каждого фрагмента кости относительно друг друга, так что пользователь может ввести окончательное желаемое пространственное расположение посредством интерфейса 106 пользователя. Положение каждого фрагмента кости 120 может быть определено с помощью кодирующих устройств 116 рычагов 108, которые соединены с обломками кости посредством соединительных деталей 122.
Как представлено на Фиг. 2, роботизированное устройство 102 может устанавливаться на операционном столе 118 так, чтобы рычаги 108 можно было присоединить к соединительным деталям 122, вставленным в обломки кости 120. В качестве альтернативы, роботизированное устройство 102 может устанавливаться на отдельном столе, перемещаемом вдоль операционного стола 118. Рычаги 108 могут устанавливаться на боковой стороне стола 118 с помощью продольного элемента 109 так, чтобы каждый из рычагов 108 имел возможность скользить вдоль продольного элемента 109 с целью перемещения вдоль длины стола 118. Продольный элемент 109 также может быть выполнен с возможностью двигаться относительно стола 118 посредством, например, вращения. Хотя на чертежах роботизированное устройство 102 представлено как имеющее два рычага 108, специалистам в данной области техники очевидно, что роботизированное устройство 102 может содержать любое количество рычагов 108.
Рычаги 108 приспособлены передвигаться в трехмерном пространстве в шести направлениях и под шестью углами наклона для того, чтобы давать возможность располагать рычаги 108 так, как это необходимо, относительно друг друга. Чтобы двигаться в шести направлениях, каждый из рычагов 108 включает в себя первое плечо 140 и второе плечо 142, соединенные между собой с возможностью вращения. Первое плечо 140 проходит между первым концом 144 и вторым концом 146, а второе плечо 142 проходит между первым концом 148 и вторым концом 150. Второй конец 146 первого плеча 140 соединен с возможностью вращения с первым концом 148 второго плеча 142 посредством, например, шарнира (не показано), так что первое плечо 140 и второе плечо 142 имеют возможность вращаться относительно друг друга на шарнире. Специалисты в данной области техники учтут, что соединение с возможностью вращения первого плеча 140 и второго плеча 142 рычага 108 может действовать аналогично локтевому суставу человека. В дополнение, второй конец 150 второго плеча 142 каждого из рычагов 108 может соединяться с возможностью скольжения с продольным элементом 109 так, что второе плечо 142 также будет иметь возможность вращаться относительно продольного элемента 109, позволяя рычагам 108 двигаться относительно стола 118. Таким образом, специалистам в данной области техники очевидно, что рычаги 108, вместе с продольным элементом 109, дают возможность рычагам 108 двигаться в трехмерном пространстве с целью корректировки шести видов смещения (например, переднее заднее, медиальное (относящееся к центру) латеральное (удаленное от центра) и укорачивающее - удлиняющее).
Первое плечо 140 рычага 108 далее может содержать участок 152 запястного шарнира, действие которого, аналогичное работе лучезапястного сустава человека, будет очевидно для специалистов в данной области. Как представлено на Фиг. 3-4, участок 152 запястного шарнира включает в себя пластину 154, которая поддерживает и определяет положение стержня 189, который может сцепляться с захватным устройством 136 (показанным на Фиг. 9-13) для присоединения соединительной детали 122. Захватным устройством 136 может быть, например, конусная втулка, зажимный патрон или тиски, приспособленные надежно зажимать соединительные детали 122. К пластине 154 также крепится множество цилиндров 164, которые контролируют движение пластины 154 и захватного устройства 136 с целью обеспечения желательного угла наклона захватного устройства 136. Цилиндры 164 могут быть прикреплены к пластине 154 посредством, например, пучка волокон, тросика или штифта с узлом сочленения. Пластина 154 содержит дистальную поверхность 156 и проксимальную поверхность 158, причем стержень 189 соединяется с дистальной поверхностью 156, тогда как цилиндры 164 крепятся к проксимальной поверхности 158. Штифт 160, обеспечивающий осевую поддержку для стержня 189, присоединен к пластине 154. Как представлено на Фиг. 5, штифт 160 может быть соединен с пластиной 154 посредством шарнирного болта 162, вмещенного через проксимальную поверхность 158 в соответствующее пространство пластины 154. Поворотное соединение позволяет пластине 154 наклоняться под углом и вращаться вокруг шарнирного болта 162, давая возможность стержню 189 и тем самым захватному устройству 136 двигаться под углом. В предпочтительном варианте осуществления шарнирный болт 162 имеет сферическую форму, так что пластину 154 можно наклонить в любом желаемом направлении. Цилиндры 164 обеспечивают гидравлические усилия для расположения под углом пластины 154 вокруг шарнирного болта 162, давая возможность углового смещения захватных устройств 136 для того, чтобы скорректировать угловую деформацию в трех плоскостях (например, медиально-латеральное угловое смещение, передне-заднее угловое смещение, внутреннее и внешнее радиальное угловое смещение).
Пластина 154 также может содержать области 166 прикрепления натяжных элементов для прикрепления к волоконному натяжному элементу 168 каждого из цилиндров 164. Области 166 прикрепления натяжных элементов могут располагаться на проксимальной поверхности 156 по периметру пластины 154. Жидкостное движение через каждый из цилиндров 164, обеспечиваемое гидравлическим блоком 112, переходит в усилие на каждом из натяжных элементов 168, прикрепленных к пластине 154, таким образом, что усилие на натяжных элементах 168 двигает пластину 154 вокруг шарнирного болта 160 и, следовательно, прикрепленного стержня 189, в различных угловых расположениях. В предпочтительном варианте осуществления участок 152 запястного шарнира может включать в себя четыре цилиндра 164 и четыре соответствующих области 166 прикрепления натяжных элементов. Однако, специалисты в данной области техники учтут, что любое количество цилиндров 164 может быть включено, при условии, что количество цилиндров 164 является достаточным для того, чтобы обеспечить полный угол смещения пластины 154 и стержня 189 во всем желательном диапазоне движения. Как представлено на Фиг.6, натяжной элемент 168 может выходить из цилиндра 164 за пределы дистального конца 170 цилиндра 164. Цилиндр может содержать поршень 172, непроницаемый по текучей среде благодаря клапану 174. Поршень 172 может быть соединен с тягой 176, через которую проходит натяжной элемент 166. Таким образом, гидравлическое усилие, обеспечиваемое гидравлическим блоком 112 через цилиндр 164, подается на натяжной элемент 168, проходящий через него, для превращения в движение пластины 154. Хотя цилиндры 164 описываются как прикрепляемые к пластине 154 посредством волоконных натяжных элементов 168, специалисты в данной области учтут, что цилиндры 164 могут прикрепляться к пластине 154 с помощью разнообразных элементов крепления, таких как, например, тросик или штифт с узлом сочленения.
В альтернативном варианте осуществления движение пластины 154 может обеспечиваться посредством механизма прямолинейного движения, содержащего устройства зубчатого зацепления, ремни или устройство ходового винта. Механизм прямолинейного движения также может крепиться к пластине 154 с помощью, например, волокон, тросика или штифта с узлом сочленения.
Как представлено на Фиг. 7, гидравлический блок 112 может подавать гидравлическое усилие через цилиндры 164 на натяжные элементы 168 для расположения пластины 154 под углом посредством двигателя 178 и насоса 180, который выгоняет текучую среду из резервуара 182. Гидравлический блок 112 далее включает в себя клапан 184 сброса давления, клапан 186 переключения и перепускной клапан 188. Насос 180 выгоняет текучую среду из резервуара 182, которая течет к клапану 184 сброса давления, когда покидает насос 180. Затем текучая среда, находящаяся под давлением, направляется либо назад в резервуар 182, либо к клапану 186 переключения. Текучая среда, находящаяся под давлением, может быть направлена назад в резервуар 182, например, при достижении заранее установленного максимального давления системы. Клапан 186 переключения может иметь три положения. В первом положении текучей среде запрещено проходить через клапан 186 переключения. Во втором положении текучая среда, находящаяся под давлением, проходит через клапан 186 переключения в первый из цилиндров 164а, тогда как допускается, что текучая среда из второго цилиндра 164b, находящаяся при нормальном давлении, возвращается в резервуар 182. В третьем положении текучая среда, находящаяся под давлением, может протекать через клапан 186 переключения во второй цилиндр 164b, тогда как текучая среда, находящаяся при нормальном давлении, из первого цилиндра 164а может вернуться в резервуар 182.
Гидравлический блок 112 также может быть установлен таким образом, что роботизированное устройство 102 может работать в нейтральном или щадящем режиме, в котором цилиндры 164 перемещаются вручную. В щадящем режиме клапан 186 переключения переводится в первое положение, в котором жидкость не проходит через него, а перепускной клапан 188 устанавливается так, что через него жидкость протекает свободно. Тогда цилиндры 164 и рычаги можно передвигать вручную в необходимое положение и/или ориентацию и затем блокировать в желательном положении. Специалистам в данной области техники очевидно, что, хотя иллюстрируемый и описываемый гидравлический блок 112 имеет два цилиндра 164а и 164b, гидравлический блок 112 может быть приспособлен таким образом, чтобы можно было использовать любое количество цилиндров 164 для движения пластины 154.
В альтернативном варианте осуществления гидравлический блок 112′ может подавать гидравлические усилия на первый 164а′ и второй 164b′ цилиндры с целью обеспечить угол наклона пластины 154 и рычагов 108, как описывается выше в отношении системы 100. Гидравлический блок 112′ может включать в себя двигатель 178′, приводящий в действие механизм 180′ линейного перемещения для одновременного движения первого 182а′ и второго 182b′ главных цилиндров, соответственно. В зависимости от желательного движения, один из первого 182а′ и второго 182b′ главных цилиндров перекачивает текучую среду, находящуюся под давлением, в один из первого 164а′ и второго 164b′ цилиндров, соответственно. Аналогично гидравлическому блоку 112, гидравлический блок 112′ может быть сконфигурирован в щадящем режиме так, чтобы цилиндры 164 и тем самым рычаги 108 могли перемещаться вручную, в соответствии с необходимостью. При работе в щадящем режиме перепускной клапан 188′ устанавливается так, что через него текучая среда протекает свободно.
Как представлено на Фиг. 9, примерный способ использования системы 100 включает в себя введение одной или более соединительных деталей 122 в каждый из множества обломков кости 120, подлежащих репозиции относительно друг друга. Каждая из соединительных деталей 122 может представлять собой костное фиксационное устройство, такое как, например, винт Шанца, стержень или скоба. В примерном варианте осуществления первый конец 132а первой соединительной детали 122а вставляется в первый обломок 124 кости 120, тогда как первый конец 132b второй соединительной детали 122b вставляется во второй обломок 126 кости 120. Как можно видеть, в данном примере, первая соединительная деталь 122а вставлена в проксимальный участок 128 кости 120, в то время как вторая соединительная деталь 122b вставлена в дистальный участок 130 кости 120. Хотя в данном примере две соединительные детали 122 представлены с единственной соединительной деталью 122, вставленной в каждый из обломков кости 120, специалистам в данной области техники очевидно, что любое количество соединительных деталей 122 может быть задействовано в каждом из обломков кости 120 для достижения необходимой устойчивости каждого из обломков кости.
Как представлено на Фиг. 10-11, каждый из рычагов 108 выполнен с возможностью соединяться с костью 120 посредством соединительных деталей 122. Например, первый рычаг 108а соединяется с первой соединительной деталью 122а, а второй рычаг 108b соединяется со второй соединительной деталью 122b. Специалистам в данной области техники очевидно, однако, что любое количество рычагов 108 может применяться для самостоятельного манипулирования любым количеством обломков кости относительно друг друга. Как указано выше, каждый из рычагов 108 может содержать захватное устройство 136, присоединяемое к соответствующему второму концу 134 соединительной детали 122. Захватные устройства 136 рычагов 108 могут включать в себя, например, зажим или тиски, приспособленные надежно зажимать вторые концы 134 соединительных деталей 122. В качестве альтернативы, захватные устройства 136 могут представлять собой выступы или другие элементы, сконфигурированные для прочного совпадения со вторыми концами 134 соединительных деталей 122.
Для того, чтобы присоединить захватные устройства 136 ко вторым концам 134 соединительных деталей 122, роботизированное устройство 102 может быть установлено в щадящем режиме, позволяющем вручную передвигать каждый из рычагов 108 в положение, в котором его можно присоединить к соответствующей соединительной детали 122. Специалистам в данной области техники очевидно, что щадящий режим может быть запущен посредством интерфейса 106 пользователя. После присоединения захватных устройств 136 к каждой из соединительных деталей 122, роботизированное устройство 102 может быть переключено в режим блокировки, в котором рычаги 108 блокируются по всем осям движения. Затем кодирующие устройства 116 на каждом из рычагов 108 доставляют информацию в систему для определения точного положения и размещения каждого из рычагов 108. Данная информация затем используется для управления движением рычагов 108 и, следовательно, соединительных деталей 122 и прикрепленных обломков кости, с целью достижения желательного окончательного пространственного соотношения между различными фрагментами кости. После перехода в режим блокировки, пользователь управляет движением рычагов 108 посредством интерфейса 106 пользователя.
Пользователь может управлять движением рычагов 108 посредством интерфейса 106 пользователя путем, например, выбора одного или более рычагов и манипулирования одной или несколькими ручками управления или другими контроллерами в необходимых направлениях для того, чтобы вызвать соответствующее движение рычагов 108. Если потребуется, данный процесс может быть повторен для других рычагов 108 до тех пор, пока не будет достигнуто требуемое пространственное соотношение между фрагментами кости. Как описывалось выше, рычаги 108 могут двигаться в шести линейных направлениях и под шестью углами наклона посредством движения вращающихся первого 140 и второго 142 плеч и участка 152 запястного шарнира рычага 108. В случае если интерфейс 106 пользователя содержит персональный компьютер, точки на обломках 124, 126 кости могут обозначаться как вершины, которые могут быть смещены путем присвоения заданных позиций данным точкам, как очевидно специалистам в данной области техники. В предпочтительном варианте осуществления точки, обозначенные как вершины, могут быть теми точками на обломках 124, 126 кости с проксимального и дистального 128, 130 концов, соответственно, к которым присоединены рычаги 108. Специалисты в данной области техники учтут, что каждый из рычагов 108 может двигаться независимо от других для достижения желательного пространственного соотношения между фрагментами кости 120. В качестве альтернативы, что также очевидно специалистам в данной области техники, любая группа рычагов 108 может двигаться одновременно для того, чтобы поддерживать желательное пространственное соотношение между любыми или всеми фрагментами кости во время движения к желательному пространственному соотношению. Пользователь может продолжать вводить команды, соответствующие желаемому расположению рычагов 108 и, следовательно, фрагментов кости, посредством интерфейса 106 пользователя, пока все обломки кости 120 не будут вправлены, в соответствии с необходимостью.
В целом, репозиция закончится, когда расположение обломков 124, 126 кости 120 будет восстановлено в виде, максимально близком к их расположению до перелома, как представлено на Фиг. 12. Однако, система 100 может использоваться для сохранения расположения кости 120, желательного для должной фиксации.
Например, как представлено на Фиг. 13, роботизированное устройство 102 может поворачивать кость 120 относительно операционного стола 118 в положение, предназначенное для облегчения введения устройства фиксации, такого как штифт для остеосинтеза. Рычаги 108 могут повернуть кость 120 путем вращения продольного элемента 109, к которому присоединены рычаги 108, относительно стола 118.
В альтернативном варианте осуществления, по меньшей мере, один из рычагов 108 может быть соединен с соединительным элементом/элементами, который удерживает несущую конструкцию, поддерживающую проксимальный или оконечный участок концевой части кости 120, подвергшейся перелому. Концевая часть может быть прикреплена к несущей конструкции посредством костных соединителей или может просто лежать на несущей конструкции на подходящей ватно-марлевой подушечке. Данная несущая конструкция способствует расположению кости 120 в желательном пространственном положении, так что кость 120 может быть вправлена или размещена для введения устройства фиксации.
Для специалистов в данной области техники будет очевидно, что могут быть внесены различные изменения и модификации в структуру и методику настоящего изобретения, без отклонения от сущности и объема изобретения. Таким образом, предполагается, что настоящее изобретение охватывает модификации и вариации данного изобретения при условии, что они находятся в пределах объема прилагаемых пунктов Формулы изобретения и их эквивалентов.
Реферат
Группа изобретений относится к медицине. Устройство для лечения переломов кости содержит множество рычагов, множество элементов сочленения, механическое устройство, контроллер и раму. Каждый из рычагов отходит от проксимального конца к дистальному концу и способен двигаться в трехмерном пространстве. Проксимальный конец каждого рычага соединен с рамой. Каждый из элементов сочленения соединен с дистальным концом соответствующего рычага, где элемент сочленения вмещает с возможностью блокировки элемент фиксации кости, прикрепленный к соответствующему обломку кости таким образом, что каждый из рычагов соединен с соответствующим обломком кости. Механическое устройство обуславливает движение рычагов для перемещения каждого из рычагов относительно рамы. Контроллер получает данные, соответствующие желательному окончательному положению обломков кости относительно друг друга, и управляет механическим устройством для передвижения рычагов относительно друг друга для достижения желаемого окончательного положения обломков кости относительно друг друга. Рама включает продольный элемент, к которому присоединено множество рычагов. Продольный элемент выполнен с возможностью вращения для того, чтобы вращать множество рычагов относительно рамы. Способ для лечения переломов кости включает в себя: крепление первого фрагмента кости к первому элементу фиксации кости и второго фрагмента кости ко второму элементу фиксации кости; соединение дистального конца первого рычага с первым элементом фиксации кости и дистального конца второго рычага со вторым элементом фиксации кости, причем каждый из первого и вто
Формула
множество рычагов, каждый из которых отходит от проксимального конца к дистальному концу и способен двигаться в трехмерном пространстве, причем проксимальный конец каждого рычага соединен с рамой;
множество элементов сочленения, причем каждый из элементов сочленения соединен с дистальным концом соответствующего рычага, где элемент сочленения вмещает с возможностью блокировки элемент фиксации кости, прикрепленный к соответствующему обломку кости таким образом, что каждый из рычагов соединен с соответствующим обломком кости;
механическое устройство, обуславливающее движение рычагов для перемещения каждого из рычагов относительно рамы;
контроллер, получающий данные, соответствующие желательному окончательному положению обломков кости относительно друг друга, и управляющий механическим устройством для передвижения рычагов относительно друг друга для достижения желаемого окончательного положения обломков кости относительно друг друга; и
раму, включающую продольный элемент, к которому присоединено множество рычагов, причем продольный элемент выполнен с возможностью вращения для того, чтобы вращать множество рычагов относительно рамы.
крепление первого фрагмента кости к первому элементу фиксации кости и второго фрагмента кости ко второму элементу фиксации кости;
соединение дистального конца первого рычага с первым элементом фиксации кости и дистального конца второго рычага со вторым элементом фиксации кости, причем каждый из первого и второго рычагов проходит между дистальным концом и проксимальным концом, соединенным с рамой, при этом рама включает продольный элемент, к которому присоединено множество рычагов, причем продольный элемент выполнен с возможностью вращения для того, чтобы вращать первый и второй рычаги относительно рамы;
получение данных, соответствующих желательному окончательному положению первого и второго фрагментов кости относительно друг друга; и
управление механическим устройством с целью перемещения первого и второго рычагов относительно друг друга для достижения желательного окончательного положения фрагментов кости.
Комментарии