Тележка железнодорожного вагона - SU579887A3
Код документа: SU579887A3
Чертежи

Описание
1
Изобретение относится к транспортным средствам.
ИзБестна тепежка железнодорожных вагонов , содержащая раму, опирающуюся на колесньш пары с буксами через систему подвешивания (например пружину), включающую рессоры и амортизаторы, например гидравлические il.
Однако в этих тележках имеется постоянная-механическаяcBssb между подрессоренными рамой и неподрессоренными колесными парами, которые подвержены изнооу требуют периодической замены и не обеспечивают при высоких скоростях плавность хода вагона.
Цель изобретения - улучшение динамической характеристики тележки.
Это достигается тем, что система подвешивания состоит из смонтированных на раме тележки и буксах друг над другом и параллельно продольной оси тележки соответственно электромагните и ферромагнитных шин, связанных между собой жестк закрепленными на шинах и свободно прохоД5ш1ими через электромагниты стержнямиупорами , при этом обмотка электромагавтов подключена к электронному блоку автоматического регулирования зазора между шинами и электромагнитами.
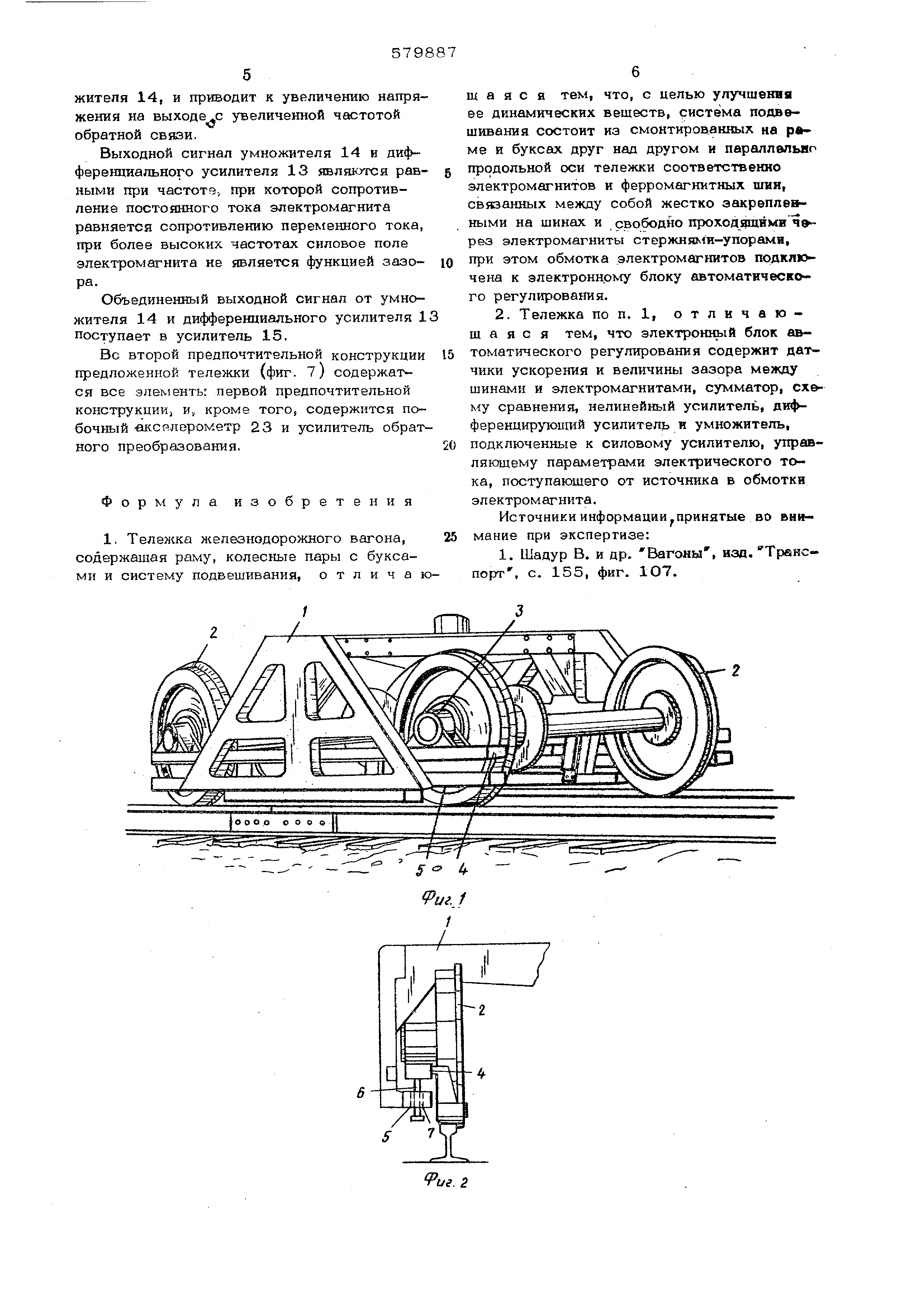
При этом блок автоматического регулирования может состоять из датчике ускорения и величины аазсфа между шинами и электромагнитами, сумматор, схему cpai нения , нелинейный усилитель, диффервниирукядий усилитель и умножитель, подкгаочвнныв к силсвому усилителю, управляющему параметрами электрического тока, поступающего от источника в обмотки электромагнита. На . 1 изображена предлагаемая те лежка , общий В1щ; на фиг. 2 - то же, внд с торца} на фиг. 3 - схема подвески; ва фиг. 4 - блок-схема автоматического регулирования; на фиг. 5 - схема выравнивающего контура для установления начальной величины зазора; на фиг. 6 - то же, с вторым входным аксеп юметром для востф ятия боковых перемещений рамы тележ-ки .
Тележка содержит раму 1,|колеснйв 2 с буксами 3 и свстему подвешнвани я, состоящую из ферромагнитных шин 4, закрепленных на буксах 3 и расположенных параллельно продольной оси тележки, электромагнитов 5, закрепленных на раме тележки под ферромагнитными шинами, устройства управляюиего положением электромагнитов относительно шин, представляющего собой электронный блок автоматического регулирования.
В центральной части ферромагнитной шины жестко закреплен стержень-упор 6, свободно проходящий через отверстие 7 в электрома1ните .
Электронный блок автоматического регулирования содержит датчики ускоренияакселерометры 8перемещения электромагнита от предварительно установленной фиксированной в пространстве точки, датчики 9 перемещения, т.е. изменения предварит тельно установленного зазора € между ферромагнитнымн шинами и электромагнитами, схему сравнения с сумматором 10, схемы сравнения 11, нелинейного усилителя 12 дифференциального усилителя 13, умножителя 14, силового усилителя 15.
Основным источником мощности системы подвешивания является внешний источник 16
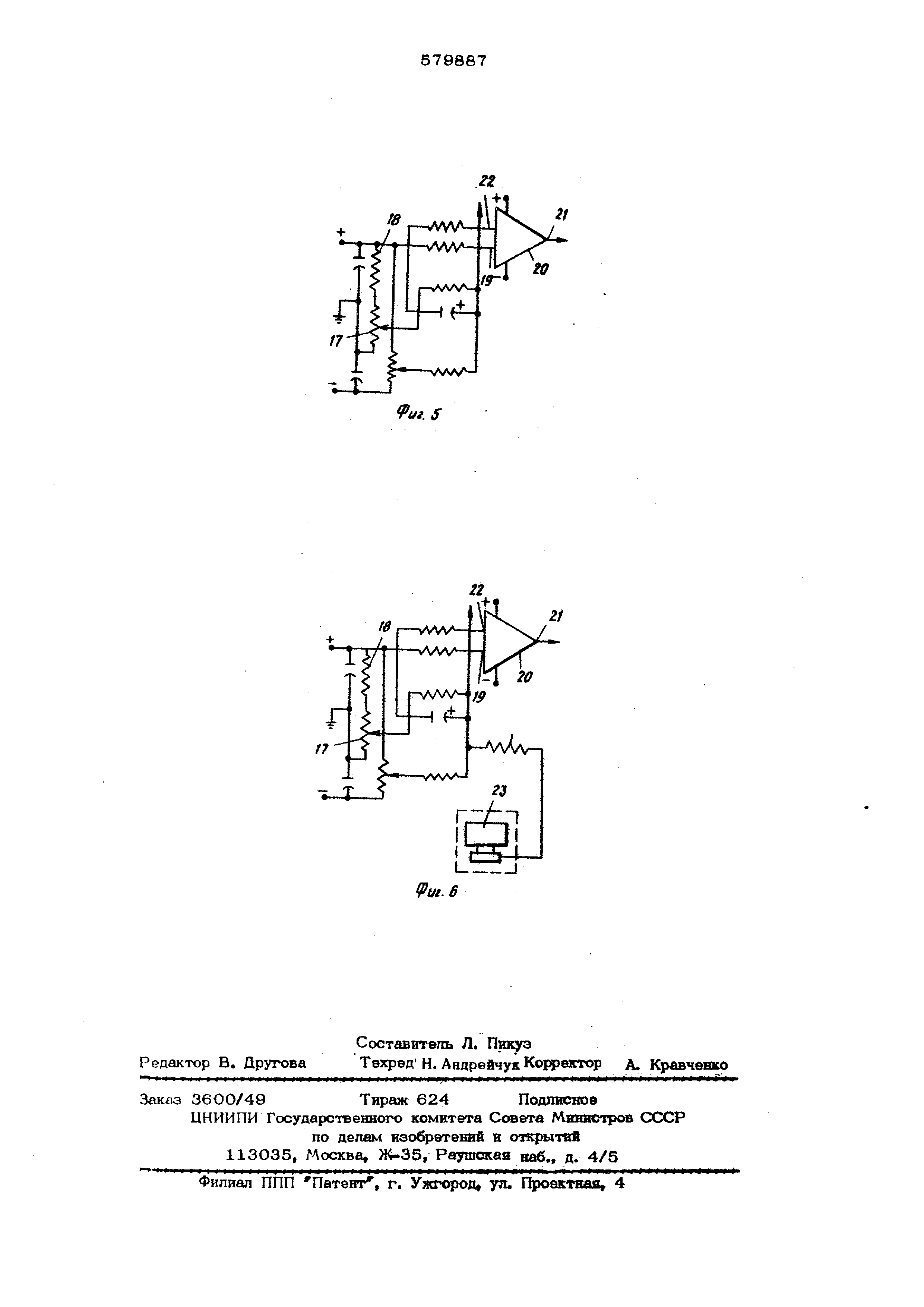
Когда энергия впервые подается к системе движок ре ос та та 17 (см. фиг. 5} устанавливаегся в попожение максимальногосопротивпения по отношению к сопротивлению 18 при входном направлении. Затем включается система электроснабжения. После приложения энергии реостат 17 устанавливается в положение для снижения сопротивления относительн к входному напряжению для реостата 18 до тех пор, пока уровень напряжения на клемме 19 усилителя 2О вызовет достаточное напряжение сигнала на клемме 21 того
самого усилителя для обеспечения входного сигнала для остальной части электронной схемы (не показано), для сообщения электромагнитом 5 достаточного магнит- кого силового поля для подъема в направпении к ферромагнитным шинам 4 рамы 1 тележки, поддерживаемой электромапштным силовым полем, и установления требуемого зазора. Подъемное перемещение останавливается , и рама подвешивается под ферромагнитными шинами 4 в тот момент, когда сигнал напряжения от датчика 2, приложенный к клемме 22 усилителя 20, стабилизирует напряжение на клемме 19 того же самого усилителя, полученное регулированием реостата 17,
Если на раму будут действовать направявншле вверх или вниз векторы сил, вызывающих увелкчание или ук еньшение воздушНО1Ч зазора, датчики детектируют ускорение
этого перемещения по отношению к фиксированног точке так же, как изменение перемещения и производят соответствующие выходные электрические сигналы. Сигнал чувствительного элемента акселерометра 8 проходит через схему сравнения, схему 10 или изменения частоты в зависимости от амплитуды, чувствительную в диапазоне частоты от 0,3 до 30 Гц. Сигнал от датчика 9 также вначале пос/упает в свою соответствующую схекгу сравнения 11.
После этого сигнал положения объединяется с сигналом ускорения для общего усиления .
Сила притяжения между ферромагнитной шиной и электромагнитом гфопорционаи1ьна квадрату тока, поступаюи его через катушки электромагнитов. Для обеспечения стабильности цепи обратной связи функция второго порошка в контурэ сигнального потока должна быть линеаризована. Для осуществления этого обусловленны.й к усиленный объединенный сигнал акселерометра и датчика перемещения, находящийся на выходе компенсационной схемы 10, линеаризуется схемой 12 обычным paбoчи i уси.лителэм, используюшик1 нелинейные характеристики транзистора для электрического вьнходного сигнала, что является эквивелэкток; коршсл. квадратному от 9го позитивного эггектрическогО входного с sir нала.
Электронный умножитель 14 является другим рабочим усилителек-.., s котором выходной сигнал образуется двумя электрическими входными сигналами. Выходной сигнал схемы 12 подает входной ситнал X и сигнап вепичины зазора от датчика 9 подает входной сигнал У. Эти сигналы затем усклЕшаются вместе умножителем 14. Окончательный выход иапр5вкеиия прямо пропорционален за;зору, т.е. напряжение увелич11вается с увеличением зазора.
Электрический путь через электронный умножитель 14 является кондукционш м, так что электрический выходной сигнал находится при щелевой частоте, например, .itoraa длина зазора -постоинная между ферромагнитной шиной и электромагнитом.
Выходной сигнал от схемы 12 также подается на вход дифференциального усилителя 13, который состоит из усилителя, имеющего резистивно-емкостную цепь для осуществления электрической дифференциации . Конденсатор не шунтируется каким-пйбо концукционным контуром, так что выходной сигнал его являетоя нулевым для нулевой частоты. Этим обеспечивается путь переменного тока при выходном сигналва объединенном с выходным сигналом умножителя 14, и приводит к увеличению напряжения на выходе с увеличенной частотой обратной связи.
Выходной сигнал умножителя 14 и дифференциального усилителя 13 являются равными при частотэ., при которой сопротивление постоянного тока электромагнита равняется сопротивлению переменного тока, при более высоких частотах силовое поле электромагнита не является функцией зазора .
Объединенный выходной сигнал от умножителя 14 и дифференциального усилителя 1 поступает в усилитель 15,
Во второй предпочтительной конструкции предложенной тележки (фиг. 7) содержатся все элементы первой предпочтительной конструкции, и, кроме того, содержится побочный-акс ел ером етр 23 и усилитель обратного преобразования.
Формула изобретения
1. Тележка железнодорожного вагона, 25 содержащая раму, колесные пары с буксами и систему подвешивания, о т л и ч а юш а я с я тем, что, с целью улучшения ее динамических веществ, ристема подвешивания состоит из смонтированных на реме и буксах друг над другом и параллельно продольной оси тележки соответственно электромагнитов и ферромагнитных шин, связанных между собой жестко закрепленными на шинах и свободйо проходящимичэрез электромагниты стержнякш-упорами, при этом обмотка электромагнитов noflKnuv чена к электронному блоку автоматического регулирования.
2. Тележка по п. 1, отличающаяся тем, что электррК1Ь1Й блок автоматического регулирования содержит датчики ускорения и величины зазора между шинами и электромагнитами, сумматор, схему сравнения, нелинейный усилитель, дифференцирующий усилитель н умножитель, подключенные к силовому усилителю, управляющему параметрами электрического тока , поступающего от источника в обмотки электромагнита.
Источники информации принятые во внимание при экспертизе:
1. Шадур В. и др. Вагоны, изд. Транспорт , с. 155, фиг. 1О7.
8
d-H
.
zfl

Реферат
Формула
Комментарии