Упорный магнитный подшипник (варианты) - RU2138706C1
Код документа: RU2138706C1
Чертежи




Описание
Изобретение относится к магнитным подшипникам и, в частности, к упорным магнитным подшипникам.
В области магнитных подшипников, применяемых в качестве радиальных опор вращающегося элемента (или вала), известно использование постоянного магнита как средства радиальной фиксации вала. Известно также техническое решение, согласно которому постоянный магнит размещается в центре подковообразной пары зубцов, охватывающих обод, радиально выступающий из вращающегося цилиндра. По внутреннему профилю подковообразных зубцов, вокруг вращающегося вала, намотана одна или несколько обмоток. Для создания электромагнитных сил, стабилизирующих и регулирующих осевое (или продольное) положение вращающегося элемента, через обмотки пропускается переменный ток.
Однако в системах, где на вращающийся элемент воздействуют большие однонаправленные осевые нагрузки, для создания электромагнитных сил, достаточных для осевой стабилизации, необходимо приложение токов большой силы. Подобные осевые силы могут присутствовать в конструкции с вертикальным маховиком, в конструкции двигателя или любом другом случае при аналогичных условиях.
Поэтому желательно, чтобы конструкция магнитного подшипника при небольших энергетических затратах обеспечивала возможность осевого управления вертикальным маховиком или другими вращающимися системами, подверженными воздействию значительных и преимущественно однонаправленных осевых сил.
Одной из задач данного изобретения является разработка такой конструкции магнитного подшипника, которая не требует приложения большой электромагнитной энергии для управления осевым положением вращающегося элемента, находящегося под воздействием значительных осевых сил. В состав упорного магнитного подшипника, предлагаемого в настоящем изобретении, входит элемент, способный вращаться относительно оси вращения и перемещаться вдоль этой оси. Данный вращающийся элемент имеет торец и опорный участок в виде радиально выступающего обода, причем этот опорный обод имеет две стороны, а вращающийся элемент и опорный обод обладают магнитной проводимостью. Также в состав упорного магнитного подшипника входит управляющий элемент, имеющий пару противоположно лежащих зубцов, охватывающих с двух сторон опорный участок вращающегося элемента, причем каждый зубец отделен от соответствующей ему стороны опорного обода управляющим воздушным зазором, а сам управляющий узел обладает магнитной проводимостью. Следующей составной частью упорного магнитного подшипника является постоянный магнит, создающий постоянный магнитный поток и расположенный так, что его первый магнитный полюс примыкает к управляющему элементу. Далее, упорный магнитный подшипник содержит нависающую консоль, примыкающую ко второму магнитному полюсу магнита, обращенную своей торцевой поверхностью к торцу вращающегося элемента и отделенную от этого торца подмагничивающим воздушным зазором. При этом магнитный поток распространяется от магнита через консоль к подмагничивающему воздушному зазору. Нависающая консоль, подмагничивающий воздушный зазор, вращающийся элемент и его опорный участок, управляющие воздушные зазоры и управляющий элемент, входящие в состав предлагаемого подшипника, образуют замкнутый контур постоянного магнитного потока, распространяющегося от первого ко второму полюсу, причем этот постоянный магнитный поток порождает осевую силу притяжения между торцевой поверхностью вращающегося элемента и поверхностью консоли.
Далее, согласно настоящему изобретению ось вращения имеет некоторую вертикальную составляющую, а осевая магнитная сила притяжения является достаточной для удержания веса вращающегося элемента, обеспечения заданного размера подмагничивающего зазора и установки опорного участка вращающегося элемента в примерно среднее положение между зубцами управляющего элемента.
Кроме того, в соответствии с настоящим изобретением внутри управляющего элемента навиваются обмотки. Проходящий по ним электрический ток возбуждает в управляющем элементе, управляющих воздушных зазорах и на опорном участке, расположенном между зубцами, электромагнитные поля, предназначенные для регулирования сил, действующих на опорный участок, и тем самым - положения этого опорного участка в промежутке между зубцами. Также, согласно настоящему изобретению, применяется по крайней мере один датчик, установленный так, чтобы иметь возможность отслеживать положение какой-либо поверхности на вращающемся элементе с целью измерения осевого положения вращающегося элемента. Датчиком формируется электрический сигнал осевого положения вращающегося элемента.
Настоящее изобретение представляет собой существенное усовершенствование прежних вариантов конструкции упорного магнитного подшипника, поскольку снижает уровень энергии, требуемый для управления осевым (или продольным) положением систем, подверженных воздействию значительных осевых сил, таких, как система вертикально или наклонно ориентированного маховика или двигателя с горизонтальной (либо вертикальной) ориентацией вала. В изобретении предложено смещающее подмагничивание торцевой поверхности вращающегося элемента постоянным магнитом, а также переменная электромагнитная стабилизация вращающегося элемента в заданной точке вдоль его продольной оси. При использовании вертикального маховика постоянный магнит обеспечивает (силой притяжения) постоянный вес вращающегося элемента, и электромагнитный блок обеспечивает контроль балансировки при вертикальных возмущениях.
С другой стороны, для систем типа двигателя с горизонтальным валом постоянный магнит устанавливается по среднему значению развиваемой двигателем осевой силы с тем, чтобы потребная максимальная электромагнитная стабилизирующая сила составляла всего лишь половину от максимального значения силы двигателя - в отличие от обычных компоновок упорных магнитных подшипников, где электромагнитная стабилизирующая сила должна быть соразмерной с внешней возмущающей силой.
Соответственно, настоящее изобретение позволяет значительно снизить общее потребление тока в обмотках, тем самым позволяя уменьшить размеры обмоток, а также размеры, потребление энергии и требования к охлаждению контура динамического электромагнитного управления, обеспечивающего электропитание обмоток.
Перечисленные, а также другие задачи настоящего изобретения, его особенности и преимущества более наглядно раскрываются в следующем подробном описании типовых вариантов изобретения со ссылкой на прилагаемые чертежи.
Фиг.1 - поперечное сечение предшествующего упорного магнитного подшипника с радиальным магнитом.
Фиг.2 - поперечное сечение упорного магнитного подшипника, предлагаемого в настоящем изобретении.
Фиг. 3 - увеличенное поперечное сечение обода, находящегося между парой зубцов, а также соответствующих воздушных зазоров, согласно настоящему изобретению.
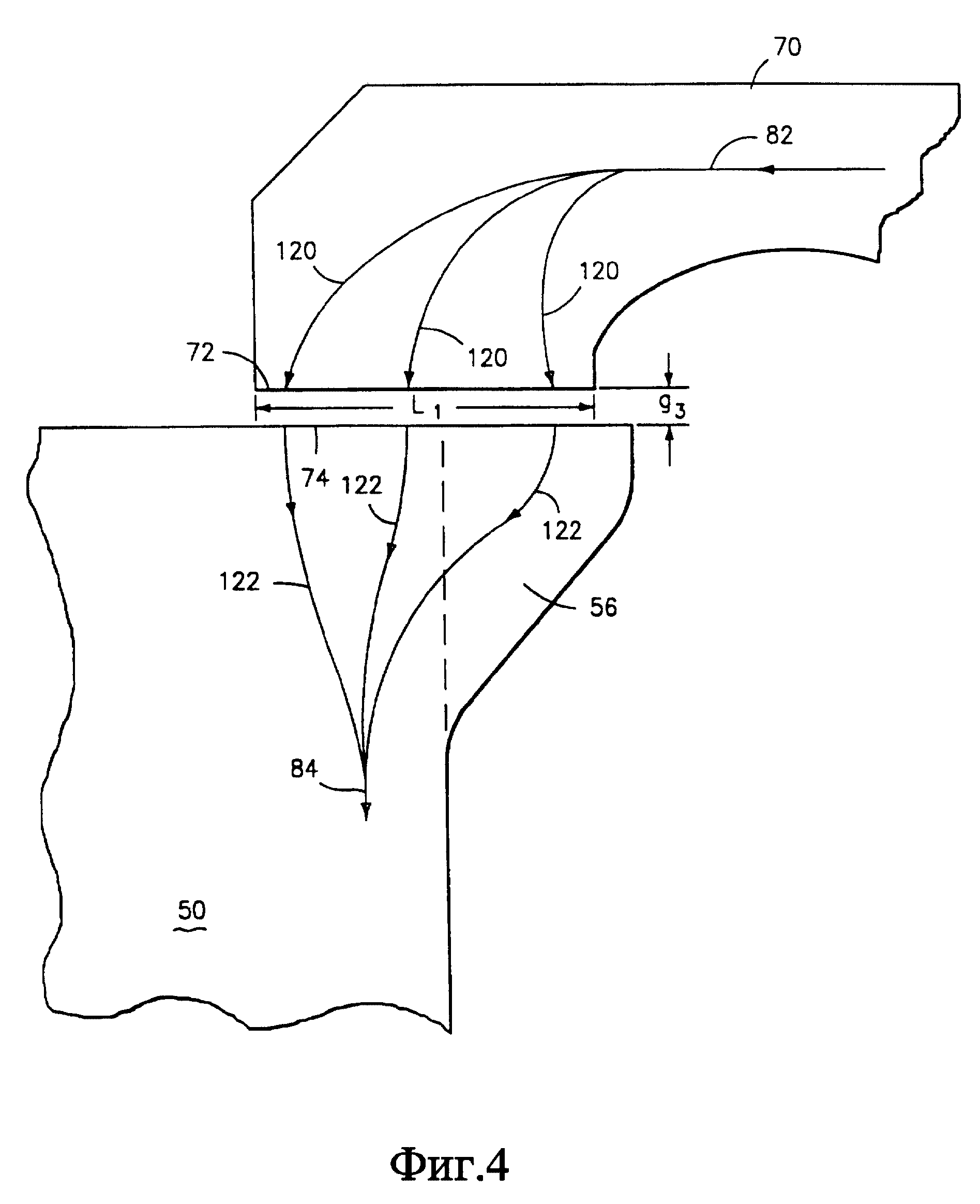
Фиг. 4 - увеличенное поперечное сечение верхней поверхности вращающегося элемента, нависающей консоли, а также зазора между ними, согласно настоящему изобретению.
Фиг. 5 - поперечное сечение альтернативного варианта упорного магнитного подшипника, предлагаемого в настоящем изобретении.
Фиг. 6 - поперечное сечение альтернативного варианта упорного магнитного подшипника, предлагаемого в настоящем изобретении.
На фиг. 1 представлен упорный магнитный подшипник, характерный для предшествующего уровня техники. Этот подшипник имеет элемент 10, вращающийся вокруг осевой линии 11. На вращающемся элементе имеется концентрический обод (или опорный обод) 12. Так как фиг.1 представляет собой поперечное сечение, этот обод 12 выглядит на ней как два выступа 12, но на самом деле обод имеет замкнуто-кольцевую форму. Обод 12 справа и слева окружен упорно-опорным элементом 14, имеющим пару зубцов 16, 18 подковообразной формы (далее по тексту - подковообразный элемент 14). Подковообразный элемент, как правило, изготавливается из материала, свободно проводящего электромагнитный поток. К центральной части внутренней поверхности подковообразного элемента 14 прикреплен постоянный магнит 20, обращенный своим северным полюсом к внешней торцевой поверхности обода 12. В такой компоновке постоянный магнит 20 имеет форму кольца, охватывающего обод 12. Постоянный магнит 20 отделен от обода 12 воздушным зазором G1. Магнитный поток 21 распространяется из магнита 20, проникает через воздушный зазор G1 в обод 12, а затем разделяется на два примерно равных потока, входящих в зубцы 16, 18, как это показано на чертеже стрелками 22, 24. Потоки 22, 24 проходят по соответствующим зубцам 16, 18 и сливаются друг с другом на южном полюсе постоянного магнита 20. Тем самым постоянный магнит 20 подмагничивает обод 12 постоянным магнитным полем.
Внутри подковообразного элемента 14 находится несколько обмоток 26. По этим обмоткам 26 пропускается электрический ток, создающий реверсивный электромагнитный поток, обозначенный стрелками 28. Когда осевая сила, действующая вдоль осевой линии 11 вращающегося элемента 10, сдвигает обод 12 вправо, на обмотки 26 подается ток, заставляющий обод 12 (а вместе с ним - и вращающийся элемент 10) вернуться назад, в центральное положение между зубцами 16, 18 подковообразного элемента 14. Аналогичным образом, когда осевая сила, действуя на вращающийся элемент 10, сдвигает обод 12 влево, на обмотки 26 подается ток противоположного направления, создающий силу, возвращающую обод 12 вправо. При этом следует учесть, что положение вала 10 и обода 12 отслеживается датчиками местоположения (не показанными на чертеже), а обмотки запитываются током из командной цепи (не показанной на чертеже) по сигналу изменения осевого положения. Для систем, в которых действуют значительные осевые нагрузки, подобная схема эквивалентна электромагниту осевого действия, обмотки которого имеют высокий уровень потребления электрического тока (или энергии).
Обратимся к фиг.2, на которой показан предлагаемый в настоящем изобретении упорный магнитный подшипник, в состав которого входит вращающийся элемент 50 с ободом 52. Вращающийся элемент 50 вращается вокруг осевой линии 54. Верхняя часть вращающегося элемента 50 утолщена и имеет вид кольцевого гребня 56 (его назначение рассматривается ниже).
Элемент, окружающий обод 52 с его верхней и нижней сторон, является элементом электромагнитного управления 60, имеющим подковообразную форму (далее по тексту он называется подковообразным элементом 60). Подковообразный элемент 60 имеет пару зубцов, поверхности 62, 64 которых обращены к ободу 52 и примерно параллельны ему. Обод 52 отделен от поверхностей 62, 64 воздушными управляющими зазорами (или управляющими зазорами) соответственно g1, g2. Воздушные зазоры g1, g2 названы здесь управляющими, потому что они оказывают влияние на динамическое электромагнитное управление осевым движением (подробно это рассматривается ниже по тексту).
Элемент, расположенный рядом с верхней стороной подковообразного элемента 60, является постоянным магнитом 68, южный полюс которого примыкает к подковообразному элементу 60. К северному полюсу постоянного магнита 68 прилегает нависающая консоль 70, торцевая поверхность 72 которой примерно параллельна торцевой поверхности 74 вращающегося элемента 50. Между торцевой поверхностью 74 вращающегося элемента 50 и торцевой поверхностью 72 консоли 70 существует воздушный зазор g3. В тексте этот воздушный зазор g3 именуется также "подмагничивающим" воздушным зазором.
В нависающей консоли 70 выполнено сквозное отверстие 80, обеспечивающее доступ к торцевой поверхности 74 вращающегося элемента 50, например, для охлаждения вала 50 или проведения технического обслуживания и т.д.
Постоянный магнит 68 имеет форму кольца, охватывающего по окружности вращающийся элемент 50. Верхняя и нижняя стороны постоянного магнита примерно плоские. При желании можно использовать магниты другой формы. Магнит 68 создает постоянный стационарный магнитный поток 82, выходящий из северного полюса магнита 68 и проходит через нависающую консоль 70. Затем магнитный поток 82 выходит из поверхности 72 консоли 70, пересекает подмагничивающий зазор g3 и проходит во вращающемся элементе 50 вдоль его оси, как показано линией 84. Далее, магнитный поток 84 проникает в обод 52 и разветвляется в нем на два примерно равных потока, входящих, как показано линиями 86, 88, через управляющие зазоры g1, g2 в соответствующие поверхности 62, 64 подковообразного элемента 60. В конце концов потоки 86, 88 сливаются на южном полюсе магнита 68, замыкая контур магнитного потока. Даже при том, что длина пути магнитного потока 86 слегка превышает длину пути магнитного потока 88, эти потоки практически идентичны, поскольку подковообразный элемент 60 обладает высокой магнитной проводимостью (или высокой магнитной проницаемостью). Замкнутый магнитный поток 82, 84, 86, 88 (источником которого является постоянный магнит 68), проходящий через консоль 70, вращающийся элемент 50, обод 52 и подковообразный элемент 60, порождает силу притяжения между торцевой поверхностью 72 нависающей консоли 70 и верхней поверхностью 74 вращающегося элемента 50. Мощность постоянного магнита подбирается так, чтобы сила притяжения удерживала (поднимала) вес вращающегося элемента 50 при конечной величине подмагничивающего зазора g3, равной в стационарных условиях примерно 0,02 дюйма (0,05 см). При этом условии подковообразный элемент 60 устанавливается так, чтобы обод 52 находился примерно посередине между поверхностями 62, 64, и управляющие зазоры g1, g2 были примерно одинаковыми и равнялись, к примеру, около 0,015 дюйма (0,04 см).
Внутри подковообразного элемента 60 размещается несколько обмоток 90, опоясывающих по окружности вращающийся элемент 50. Контур управления 92 обеспечивает питание обмоток 90 через линию 94 реверсивным электрическим током (подробно это рассматривается ниже по тексту).
На внутренней поверхности 100 отверстия 80, выполненного в нависающей консоли 70, установлена пара датчиков местоположения 96, 98. Датчики местоположения 96, 98 могут быть установлены в любом месте, обеспечивающем видимость торцевой поверхности вращающегося элемента. Датчики местоположения 96, 98 определяют осевое удаление вращающегося элемента 50 от консоли 70 и вырабатывают электрические сигналы, несущие информацию о величине подмагничивающего зазора g3, отправляя их в контур управления по линиям 104 и 106 соответственно.
В контуре управления 92 имеется известное стандартное электронное оборудование обработки сигналов, необходимое для выполнения рассматриваемых задач. Подробный состав контура управления не является существенным в контексте идеи настоящего изобретения.
Применение более чем одного датчика местоположения 100 обусловлено целесообразностью использования значения осевого положения вращающегося элемента 50, осредненного по нескольким точкам торцевой поверхности. Измеренные в этих точках значения могут различаться вследствие любого рода несовершенства торцевой поверхности 74 вращающегося элемента 50 или из-за возможного перекоса вращающегося элемента 50. Однако, при желании можно использовать и один датчик. В этом случае наиболее рационально было бы разместить этот датчик на осевой линии 54 вращающегося элемента 50, а крепление датчика к нависающей консоли возможно каким-либо известным способом. Применяемый датчик местоположения может относиться к индуктивному, оптическому, емкостному или любому другому типу, способному воспринимать положение вращающегося элемента 50 относительно торцевой поверхности нависающей консоли 70 (т.е. величину подмагничивающего зазора g3).
Внутренний профиль 110, образуемый сопряженными друг с другом нависающей консолью 70, постоянным магнитом 68 и верхней частью подковообразного элемента 60, имеет форму полуокружности, определяющей большой воздушный зазор между сторонами постоянного магнита 68 и любым смежным материалом, обладающим магнитной проводимостью. Благодаря этому зазору предельно снижены потери на рассеивание магнитного потока, создаваемого постоянным магнитом 68. Возможны также и другие формы данного профиля, например, квадратная, прямоугольная и т.д., при условии минимального рассеивания магнитного потока.
Кроме того, округление наиболее приближенных к вращающемуся элементу 50 изломов внешнего контура верхней и нижней частей подковообразного элемента 60 позволяет снизить также потери на рассеивание электромагнитного потока 112, создаваемого электрическим током в обмотках 90.
Если на вращающийся элемент 50 вдоль его осевой линии 54 (вверх или вниз, как показано на фиг.2) действует осевая сила, в контур управления 92 поступит сигнал изменения величины подмагничивающего зазора g3. В ответ на этот сигнал по линии 94 на обмотки 90 поступает электрический ток, возбуждающий в подковообразном элементе электромагнитный поток, движущийся по линии 112. Направление электрического тока в обмотках 90 определяет направление электромагнитного потока 112, которое, в свою очередь, задает направление действия силы, порожденной магнитными полями 112 и компенсирующей возмущающую осевую силу.
Например, если на вращающийся элемент действует осевая сила, направленная вниз, контур управления 92 примет сигнал изменения величины подмагничивающего зазора g3 и создаст в обмотках электрический ток. Упорный магнитный подшипник показан на фиг.2 в разрезе и виде сбоку. Если посмотреть на него сверху (со стороны датчиков), то направление электрического тока, созданного контуром управления, в обмотках 90 будет против часовой стрелки. Возбужденное этим током электромагнитное поле 112 будет, соответственно, направлено по часовой стрелке. Поле 112 частично подавляет постоянный подмагничивающий поток, происходящий из постоянного магнита 68, тем самым ослабляя силу притяжения между ободом 52 и нижней поверхностью 62. Аналогичным образом поле 112 усиливает постоянный подмагничивающий поток, тем самым увеличивая силу притяжения между ободом 52 и поверхностью 64. Таким образом достигается полезный прирост вертикальной силы, действующей на обод 52 и тем самым парирующей действие на вращающийся элемент 50 осевой силы, направленной вниз. Подобная, но обратная ситуация возникает при действии на вращающийся элемент 50 осевой силы, направленной вверх. Таким образом, величина зазора g3 (например, 0,02 дюйма или 0,05 см) в стационарных условиях всегда остается практически неизменной. Размеры зазоров g1, g2 в стационарных условиях также поддерживаются практически постоянными, например, 0,015 дюйма (0,04 см). Возможны также и другие величины указанных зазоров.
Материал, из которого изготовлен подковообразный элемент 60, способен пропускать высокочастотные магнитные поля. Примером такого материала может служить "PERMENDUR®", диапазон пропускаемых частот которого составляет примерно 10 кГц. Это дает возможность осуществлять электромагнитное управление с помощью токов высокой частоты, пропускаемых через обмотки 90. Применение углеродистой стали при высокочастотном электромагнитном управлении нежелательно из-за больших высокочастотных потерь. Для достижения наилучших показателей конструкция подковообразного элемента 60 может быть слоистой, что обеспечит максимальную магнитную проводимость. Вращающийся элемент 50 и обод 52 изготовлены из низкоуглеродистой стали. Нависающая консоль 70 изготовлена из низкоуглеродистой стали или любого другого материала, свободно проводящего магнитные поля. Обод 52 в ином исполнении для улучшения частотной характеристики может иметь слоистую структуру - в виде концентрических колец; однако при этом следует убедиться, чтобы напряжения в кольцах обода 52 не превышали предела их прочности. Поскольку длина силовых линий магнитного поля в ободе 52 небольшая, высокочастотные потери в нем намного меньше, поэтому изготовление обода из низкоуглеродистой стали не повлечет за собой значительных высокочастотных потерь. При желании могут использоваться и другие материалы.
В соответствии с фиг.3 и 4 сила притяжения, действующая через подмагничивающий зазор g3, остается практически постоянной, однако в управляющих зазорах g1, g2 действуют очень неуравновешенные силы, требующие электромагнитного управления с достаточно высоким быстродействием.
Сила притяжения (F), создаваемая магнитным потоком, проходящим в магнитопроводящем материале через воздушный зазор в другой магнитопроводящий материал, пропорциональна произведению площади поверхности материала, из которого этот поток выходит, на квадрат плотности потока или F пропорциональна А х В2. Плотность потока (В) представляет собой магнитный поток ф (единица измерения - вебер) через единицу площади (А) или ф/A. Таким образом, по мере уменьшения площади поверхности плотность потока, а вместе с ней - и сила притяжения (F) возрастают. Совместив оба приведенных соотношения, получим выражение: F пропорциональна ф2/А. Кроме того, величина магнитного потока, пересекающего воздушный зазор, находится в обратно пропорциональной (не обязательно линейной) зависимости от размера этого воздушного зазора (аналогично сопротивлению в электрических цепях). Таким образом, чем больше зазор, тем слабее пересекающий его магнитный поток. Соответственно, при заданном воздушном зазоре, разделяющем два материала, величина силы обратно пропорциональна площади поперечного сечения того материала, из которого магнитный поток исходит.
Как видно из фиг.3, если к вращающемуся элементу 50 приложена осевая сила, выводящая его из среднего положения между двумя зубцами 62, 64, то наличие в этих зубцах 62, 64 магнитного поля оказывает дестабилизирующее влияние, заставляющее обод 52 смещаться еще дальше от среднего положения. В частности, при таком смешении вращающегося элемента 50 и его обода 52 вниз, когда зазор g2 становится вдвое больше, чем зазор g1, т.е. g2 = 2•g1, наблюдаются два следующих эффекта. Во-первых, увеличение воздушного зазора g2 приводит к, как минимум, пропорциональному ослаблению магнитного потока ф, а сила притяжения (F) между поверхностью 64 и ободом 52 ослабевает в еще большей степени - в силу квадратичного характера соотношения между силой и магнитным потоком. Во-вторых, уменьшение зазора g1 приводит к, как минимум, пропорциональному увеличению магнитного потока ф, а сила притяжения (F) между поверхностью 62 и ободом 52 увеличивается в еще большей степени - в силу квадратичного характера соотношения между силой и магнитным потоком. Итак, сила, смещающая обод 52 вверх, уменьшается, а сила, смещающая обод 52 вниз, увеличивается - обе в квадратичной зависимости от величины смещения, в результате чего обод 52 ускоряется в направлении к нижней поверхности 62. Следовательно, контур управления 92 осевым положением должен обладать быстродействием, достаточным для парирования отклонений от среднего осевого положения обода 52 в ранней стадии их роста. Это позволит сократить количество электроэнергии, необходимое для возвращения обода в среднее положение. Нами установлено, что ширина полосы пропускаемых частот замкнутого контура управления, равная 10 кГц, в большинстве случаев (для маховика со строго вертикальной ориентацией) является достаточной для компенсации отклонений.
Как следует из фиг.4, длина L1 (или разность внешнего и внутреннего радиусов) поверхности 72 (а следовательно - и площадь этой поверхности) нависающей консоли 70 является гораздо большей, чем длина L2 поверхностей 62, 64 на фиг.3 (а также их площадей). В результате - площадь поверхности, граничащей с подмагничивающим зазором больше, а плотность магнитного потока через подмагничивающий зазор - соответственно - меньше, чем в управляющем зазоре. Это приводит к рассеиванию магнитного потока по большей площади, как это показано линией 120.
Как следствие, для заданного изменения подмагничивающего и управляющего зазоров соответствующее изменение силы взаимодействия поверхностей 72 и 74 в подмагничивающем зазоре, намного меньше, чем изменение силы взаимодействия поверхностей 62, 64 с ободом 52 (в расчете на единицу площади взаимодействующих поверхностей). В частности, при величине подмагничивающего воздушного зазора g3 около 0,02 дюйма (0,05 см) и длине 1,2 дюйма (3,0 см) соответствующее изменение силы, происходящее из-за изменения величины подмагничивающего зазора g3 на 0,005 дюйма (0,012 см), совершенно мало. Кроме того, подмагничивающий воздушный зазор g3, в отличие от подковообразного элемента 60, не испытывает действия дополнительных дестабилизирующих сил. Таким образом, небольшие изменения воздушного зазора g3 могут не сопровождаться возникновением сил притяжения, поднимающих вращающийся элемент 50. Следовательно, управляющие электромагнитные силы, регулируемые контуром управления 92, нуждаются, главным образом, в корректировке по изменениям управляющих воздушных зазоров g1, g2, а не подмагничивающего зазора g3.
Кроме того, длина (или диаметр) верхней поверхности 74 вращающегося элемента 50, по крайней мере, равна длине L1 поверхности 72 нависающей консоли 70. Для того, чтобы привести требуемую площадь поверхности 74 в соответствие с площадью 72 применяется кольцевой гребень 56 большего диаметра для вращающегося элемента 50. В другом исполнении диаметр вращающегося элемента 50 может быть равным диаметру кольцевого гребня 56 и быть постоянным по всей длине. Тем не менее, в целях уменьшения диаметра, а соответственно - и веса вала все-таки можно использовать кольцевой гребень 56, что позволит магнитному потоку 120, пересекающему зазор g3, войти во вращающийся элемент 50 в виде линий 122, которые при сужении проходного сечения сливаются в одну линию магнитного потока 84. С применением этой конфигурации можно получить требуемые значения плотности потока, силы и соотношения площадей поверхностей при уменьшении диаметра остальной части вращающегося элемента 50.
Как показано на фиг.3 и 4, обод 52 (фиг.З) и кольцевой гребень 56 (фиг. 4) расположены напротив поверхностей 62, 64 зубцов и поверхности 72 консоли соответственно и, кроме того, перекрывают их по площади. Этим обеспечена независимость магнитного потока от любых возможных условий теплового расширения или сужения этих частей подшипника.
На фиг.5 представлен альтернативный вариант настоящего изобретения. Нависающая консоль 130, входящая в состав подшипника, в целом подобна консоли 70 на фиг.2, однако не имеет отверстия по центру. В нависающей консоли 130 расположен также единственный датчик местоположения 132, аналогичный датчикам местоположения 100, показанным на фиг.2. Датчик 132 вырабатывает электрический сигнал, несущий информацию о величине подмагничивающего зазора g3. Далее, в этом варианте присутствует вращающийся элемент 140, подобный вращающемуся элементу 50, показанному на фиг.2, но не имеющий кольцевого гребня 56.
Принцип действия подшипника в этом варианте исполнения практически такой же, как и в рассмотренном ранее варианте, показанном на фиг.2. Однако, поскольку в середине нависающей консоли 132 отсутствует сквозное отверстие, датчик 132 может быть установлен по осевой линии 142 вращающегося элемента 140. Этот вариант не исключает также использования кольцевого гребня 56 на вращающемся элементе 140 согласно фиг.2.
На фиг. 6 показан альтернативный вариант исполнения подшипника. Вместо вращающегося элемента, находящегося в центре, и подковообразных элементов, окружающих его по периметру, возможна конфигурация, в которой вращающийся элемент выполнен в виде цилиндра, окружающего неподвижную часть подшипника. В частности, эта неподвижная часть выполнена в виде центрального подковообразного элемента 200, зубцы которого ориентированы к периферии, а сам подковообразный элемент установлен внутри цилиндрического вращающегося элемента 204. Принцип работы подковообразного элемента 200 такой же, как и у элемента 60, показанного на фиг. 2. На вращающемся элементе 204 имеется обод 206, находящийся между поверхностями 208 и 210 центрального подковообразного элемента 200. Рядом с подковообразным элементом 200 установлен постоянный магнит 214. Своим северным полюсом постоянный магнит 214 прилегает к нависающей консоли 216, имеющей торцевую поверхность 218. Торцевая поверхность 218 обращена к верхней торцевой поверхности 220 вращающегося элемента 204 и примерно параллельна ей. Обе торцевые поверхности разделены подмагничивающим зазором g3 (т.е. зазором, находящимся между верхней поверхностью вращающегося элемента и нависающей консолью, аналогично фиг.2).
В этом варианте исполнения датчики местоположения 100 (рассмотренные на примере фиг. 2) размещены на нависающей консоли 216 и предназначены для измерения величины зазора g3 между вращающимся элементом 204 и нависающей консолью 216. Силовые линии 222 постоянного магнитного поля выходят из постоянного магнита 214, пересекают нависающую консоль 216, затем - подмагничивающий зазор g3 и проходят через вращающийся элемент 204 (линии 224). Поле 224 проникает в обод 206, разделяется на два примерно равных магнитных потока 226 и 228, которые вновь сливаются на южном полюсе постоянного магнита 214. Постоянное магнитное поле, создаваемое постоянным магнитом 214, порождает силу притяжения, уравновешивающую массу вращающегося элемента 204 в стационарном состоянии так, что обод 206 равноудален от каждой из двух поверхностей 208 и 210 центрального подковообразного элемента 200, аналогично варианту, рассмотренному на фиг.2.
Далее, вокруг осевой области центрального подковообразного элемента 200 накручены обмотки 230, которые возбуждают переменное электромагнитное поле, силовые линии 229 которого образуют замкнутый контур в каждом из подковообразных элементов 200. Это поле порождает магнитные силы, приложенные к ободу 206 и противодействующие силам, сдвигающим вращающийся элемент 204 в осевом направлении - аналогично тому, как это было ранее рассмотрено на примере фиг. 2. Электрический ток на обмотки 230 подается по линиям 94, также аналогично рассмотренному выше варианту изобретения по фиг.2. Материалы, из которых изготовлены вращающийся элемент 204, обод 206, нависающая консоль 216 и подковообразный элемент 200 те же самые, что были выше рассмотрены для варианта по фиг.2.
В альтернативном исполнении вместо сплошного постоянного магнита 214 может использоваться магнит кольцевой формы. В таком случае его сердцевина 232 может быть выполнена из материала с нулевой магнитной проводимостью (или материала с низкой магнитной проницаемостью, или непроницаемого материала).
Общим признаком каждого из рассмотренных вариантов изобретения является отвод энергии магнитного поля на подмагничивание вращающегося элемента и стабилизацию его положения магнитной силой смещения. Благодаря этому электромагнитные силы, порождаемые электрическим током в обмотках, необходимы преимущественно для компенсации изменений (или возмущений) в осевом направлении. В случае с вертикально расположенным (или наклоненным) маховиком постоянные магниты создают поле, сила которого достаточна для удержания веса вращающегося элемента вместе с любым установленным на нем маховиком. Другими словами, эта сила поддерживает вращающийся элемент в таком равновесном состоянии, при котором обод находится посередине между двумя поверхностями зубцов подковообразных управляющих элементов. Таким образом, потребность в электромагнитных силах, порождаемых током в обмотках, возникает только при необходимости парирования какого-либо возмущенного осевого движения вращающегося элемента, либо компенсации приложенной к нему осевой силы.
В случае горизонтально ориентированного вращающегося элемента (например, двигателя с переменной тягой) постоянное магнитное поле может быть использовано в качестве поля смещения к среднему значению силы с тем, чтобы снизить максимальное значение электромагнитной силы, создаваемой током в обмотках для воздействия на обод вращающегося элемента. Например, если двигатель развивает максимальную осевую тягу 50 фунтов силы (223 Н), то магнитное поле смещения должно иметь силу 25 фунтов (112 Н), равную среднему значению, взятому по границам диапазона сил тяги. Благодаря этому, параметры тока в обмотках должны обеспечивать электромагнитную силу, стабилизирующую обод, со значением в пределах от 0 до 25 фунтов (112 Н). А при отсутствии магнитного поля смещения верхний предел стабилизирующей силы соответствовал бы 50 фунтам (223 Н).
Форма внешних и внутренних поверхностей элемента, именующегося в данном описании "подковообразным", может быть круглой, прямоугольной, квадратной и т. д. , либо представлять собой любого рода комбинацию этих форм, при соблюдении следующих условий: наличие внутренней области для накручивания обмоток; наличие двух выступов в виде зубцов, охватывающих обод вращающегося элемента и проводящих как раздвоенный постоянный магнитный поток, возвращающийся в постоянный магнит, так и управляющий электромагнитный поток.
Следует учесть, что под вертикально установленным маховиком понимается сам вращающийся элемент 50 (фиг.2) и/или более тяжелая часть маховика, прикрепляемая к нижней части вращающегося элемента 50.
Следует также учесть, что для любого из рассмотренных вариантов изобретения полярность постоянных магнитов может быть сделана обратной. В данном случае это не влечет за собой существенных изменений работы системы.
Кроме того, настоящее изобретение осуществимо в системе, где ось вращающегося элемента имеет, наряду с вертикальной, некоторую горизонтальную составляющую, причем - так же хорошо, как и в системе со строго вертикальной ориентацией оси вращения маховика.
Реферат
Упорный магнитный подшипник с подмагничиванием постоянным магнитным полем смещения включает в себя вращающийся элемент (или вал) с ободом (или опорным участком) кольцевой формы, находящимся между парой зубцов подковообразного управляющего элемента. Постоянным магнитом создается магнитное поле, распространяющееся через нависающую консоль и порождающее силу притяжения между подмагниченными поверхностью консоли и верхней торцевой поверхностью вала. Эта смещающая сила притяжения поддерживает вал в равновесии так, что обод находится между поверхностями пары зубцов и равноудален от них. Внутри подковообразного управляющего элемента вокруг вала намотаны обмотки. При прохождении электрического тока через эти обмотки возбуждается электромагнитное поле, стабилизирующее среднее положение обода между поверхностями пары зубцов по сигналам от датчиков местоположения, отслеживающих изменения осевого положения вала. Данный подшипник применим также в системах с горизонтальным расположением вала, например в двигателе. Технический результат - конструкция данного подшипника не требует приложения большой электромагнитной энергии для управления осевым положением вращающегося элемента. 2 с и 22 з.п.ф-лы, 6 ил.

Комментарии