Ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии и силовая система, обеспечивающая сверление и перепиливание в ортопедии с помощью указанного блока-пистолета - RU2627614C2
Код документа: RU2627614C2
Чертежи

Описание
По настоящей заявке испрашивается приоритет в соответствии с заявкой на патент Китая №201210494930.8 под названием «Ручной блок-пистолет для сверления и перепиливания в ортопедии», поданной 28 ноября 2012 года, содержание которой полностью включено в настоящий документ посредством ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к медицинским приборам и инструментам, в частности к ручному блоку-пистолету для сверления и перепиливания в ортопедии, а также к силовой системе, обеспечивающей сверление и перепиливание в ортопедии с помощью указанного блока-пистолета, которые используются при хирургических операциях.
Уровень техники
Ортопедические операции со сверлением и перепиливанием являются обычными хирургическими операциями, которые выполняются с использованием ортопедических устройств для сверления и перепиливания (например, ручного блока-пистолета). Традиционная технология предусматривает, что ортопедическое устройство для сверления и перепиливания обычно выполнено в виде ручного блока, включающего в себя корпус; приводной электродвигатель, расположенный в корпусе; зажимное устройство; переключатель управления; и аккумулятор, обеспечивающий питание; кроме того, конструкция в виде ручного блока проста в управлении и может выполнять операции по сверлению и перепиливанию, переключаясь с режима на режим с помощью соответствующего переключателя. Однако поскольку устройство для сверления и перепиливания такой конструкции использует аккумулятор в качестве источника питания, время работы его в автономном режиме ограничено. Таким образом, во время эксплуатации возможен отказ питания или его понижение, что может негативно повлиять на выполнение операции или даже привести к несчастному случаю. Более того, вследствие использования аккумулятора устройство не только выделяет большое количество тепла, которое может разрушить электрические цепи, но также характеризуется повышенной массой, что усложняет управление, а это косвенно снижает эффективность его эксплуатации.
Таким образом, необходимо усовершенствовать существующее приводное устройство (т.е. блок-пистолет) для сверления и перепиливания в ортопедии во избежание возможного отказа питания или его понижения во время выполнения операции, а также обеспечить бесперебойную работу устройства, уменьшить его общую массу, сделать указанное устройство портативным и простым в управлении, а также повысить эффективность его эксплуатации.
Раскрытие изобретения
Ввиду вышеозначенного настоящим изобретением предлагается блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии во избежание ситуаций, связанных с возможным пропаданием питания или его понижением во время проведения операции, а также для обеспечения бесперебойной работы устройства, уменьшения его общей массы, придания ему компактной конструкции, облегчения управления указанным устройством и повышения эффективности его эксплуатации. Учитывая сказанное, согласно настоящему изобретению предлагается также силовая система, обеспечивающая сверление и перепиливание в ортопедии, в состав которой входит ручной блок-пистолет с электрическим приводом.
Ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии согласно настоящему изобретению включает в себя, по меньшей мере, корпус рукоятки, зажимное устройство для захвата сборных режущих инструментов, приводной электродвигатель для генерирования мощности и приведения в действие сборных режущих инструментов с целью выполнения операций по сверлению и перепиливанию, а также переключатель в сборе для управления выходной мощностью приводного электродвигателя; при этом приводной электродвигатель подключен к внешнему источнику питания.
Кроме того, приводной электродвигатель подключен к внешней системе управления, выполненной с возможностью управления режимами работы приводного электродвигателя с помощью переключателя в сборе; система управления также выполнена с возможностью приведения в действие приводного электродвигателя, заставляя его вращаться в положительном направлении, в обратном направлении, а также совершать вращения вперед и назад, используя переключатель в сборе.
Кроме того, вал ротора приводного электродвигателя представляет собой полый в осевом направлении вал ротора; предусмотрен передаточный зубчатый захват, соединенный со сборным режущим инструментом с возможностью приведения его в действие, а также соединенный с валом ротора также с возможностью приведения его в действие; при этом полый вал ротора сообщается с зубчатым захватом в продольном направлении.
Кроме того, переключатель в сборе включает в себя, по меньшей мере, направляющую штангу, регулирующий механизм направляющей штанги и сенсорный элемент направляющей штанги;
предусмотрено две направляющие штанги, которые размещены в соответствующих гнездах для направляющих штанг; эти две направляющие штанги совершают скользящие возвратно-поступательные движения в осевом направлении вдоль соответствующих гнезд для направляющих штанг; на боковой стенке направляющего канала каждого гнезда для направляющей штанги предусмотрено сквозное радиальное отверстие, а направляющий канал гнезда для направляющей штанги выполнен с возможностью прохождения через него соответствующей направляющей штанги; в сквозном радиальном отверстии установлен ролик с возможностью скольжения; длина сквозного радиального отверстия меньше диаметра ролика, и направляющая штанга выполнена с возможностью запирания в осевом направлении за счет проскальзывания ролика внутрь;
регулирующий механизм направляющей штанги содержит подвижный блок, способный вращаться вокруг оси параллельно направляющим штангам; ролики двух направляющих штанг расположены таким образом, чтобы быть обращенными непосредственно в сторону подвижного блока; подвижный блок характеризуется двумя кольцевыми волнообразными участками под ролики; указанные кольцевые волнообразные участки выполнены с возможностью приведения в действие за счет вращения подвижного блока для сообщения движения роликам, которые начинают перемещаться вдоль соответствующих сквозных радиальных отверстий;
конструкция двух кольцевых волнообразных участков выполнена с возможностью приведения в действие роликов с обеих сторон этих участков для одновременного запирания соответствующих направляющих штанг, одновременного высвобождения соответствующих направляющих штанг или запирания одной из направляющих штанг и высвобождения другой направляющей штанги в одно и то же время; и
сенсорный элемент направляющей штанги выполнен с возможностью получения сигналов о перемещении двух направляющих штанг и передачи полученных сигналов о перемещении внешней системе управления.
Кроме того, две направляющие штанги размещены симметрично с двух сторон подвижного блока, а два кольцевых волнообразных участка характеризуются наличием выступов, расположенных напротив друг друга в радиальном направлении; выемок, расположенных напротив друг друга в радиальном направлении; а также выступа и выемки, которые также расположены напротив друг друга в радиальном направлении.
Кроме того, на направляющей штанге в ее осевом направлении неподвижно закреплена втулка, а между гнездом направляющей штанги и втулкой направляющей штанги предусмотрена возвратная пружина, оказывающая возвратное усилие предварительного натяжения на гнездо направляющей штанги; боковая стенка втулки направляющей штанги снабжена осевой канавкой; в боковую стенку направляющего канала гнезда для направляющей штанги радиально вкручен направляющий винт, заходящий в осевую канавку; а продольная нижняя часть осевой канавки представляет собой глухой конец, упирающийся в направляющий винт за счет действия силы предварительного натяжения возвратной пружины; втулка направляющей штанги снабжена блокирующей выемкой под ролик для предотвращения перемещения направляющей штанги в продольном направлении.
Кроме того, гнезда направляющих штанг жестко закреплены в гнезде переключателя; шпиндель подвижного блока идет вдоль оси подвижного блока; при этом шпиндель подвижного блока установлен в гнезде переключателя и выполнен с возможностью взаимодействия с гнездом переключателя со свободным вращением; и
гнездо переключателя герметично зафиксировано в корпусе рукоятки; направляющая штанга заходит внутрь корпуса рукоятки и выступает из соответствующего гнезда направляющей штанги; конец направляющей штанги, выступающий из гнезда направляющей штанги, снабжен сенсорной головкой; а сенсорный элемент направляющей штанги представляет собой сенсорную схемную плату, которая расположена в корпусе рукоятки, жестко соединена с гнездом переключателя и адаптирована под сенсорную головку.
Кроме того, корпус рукоятки имеет наладонную часть; с концом наладонной части жестко соединено гнездо для кабеля, выполненное с возможностью заводки кабеля и его фиксации; боковая сторона наружной поверхности передней части гнезда для кабеля снабжена утопленной площадкой для выполнения соединения типа «ласточкин хвост», а внутренняя поверхность конца наладонной части снабжена утопленной канавкой для выполнения соединения типа «ласточкин хвост», выполненной с возможностью вхождения в зацепление с утопленной площадкой для выполнения соединения типа «ласточкин хвост»; а другая боковая сторона наружной поверхности передней части гнезда для кабеля жестко соединена с концом наладонной части с помощью винта.
Кроме того, в корпусе рукоятки установлен приводной электродвигатель; в полом валу приводного электродвигателя предусмотрена трубчатая втулка, расположенная на одной оси с указанным полым валом; передний конец передаточного зубчатого захвата имеет конструкцию в виде треугольного зуба.
Силовая система согласно настоящему изобретению, обеспечивающая сверление и перепиливание в ортопедии, включает в себя основное устройство; ножной контроллер, соединенный с основным устройством; и ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии, соединенный с основным устройством; при этом ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии представляет собой ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии, описанный выше.
Настоящая заявка дает положительный эффект, раскрытый ниже. Приводной электродвигатель, расположенный в ручном блоке-пистолете с силовым приводом для сверления и перепиливания в ортопедии согласно настоящему изобретению, использует внешний источник питания, в качестве которого может выступать аккумулятор большого размера или городская электрическая сеть, за счет чего можно избежать возможного пропадания питания или его понижения во время проведения операции, а также обеспечить бесперебойную работу устройства, уменьшить нагревание рукоятки, облегчить устройство, сделать его портативным и простым в управлении, а также повысить эффективность его эксплуатации.
Краткое описание чертежей
Настоящее изобретение будет далее описано в привязке к чертежам и вариантам своего осуществления, представленным ниже.
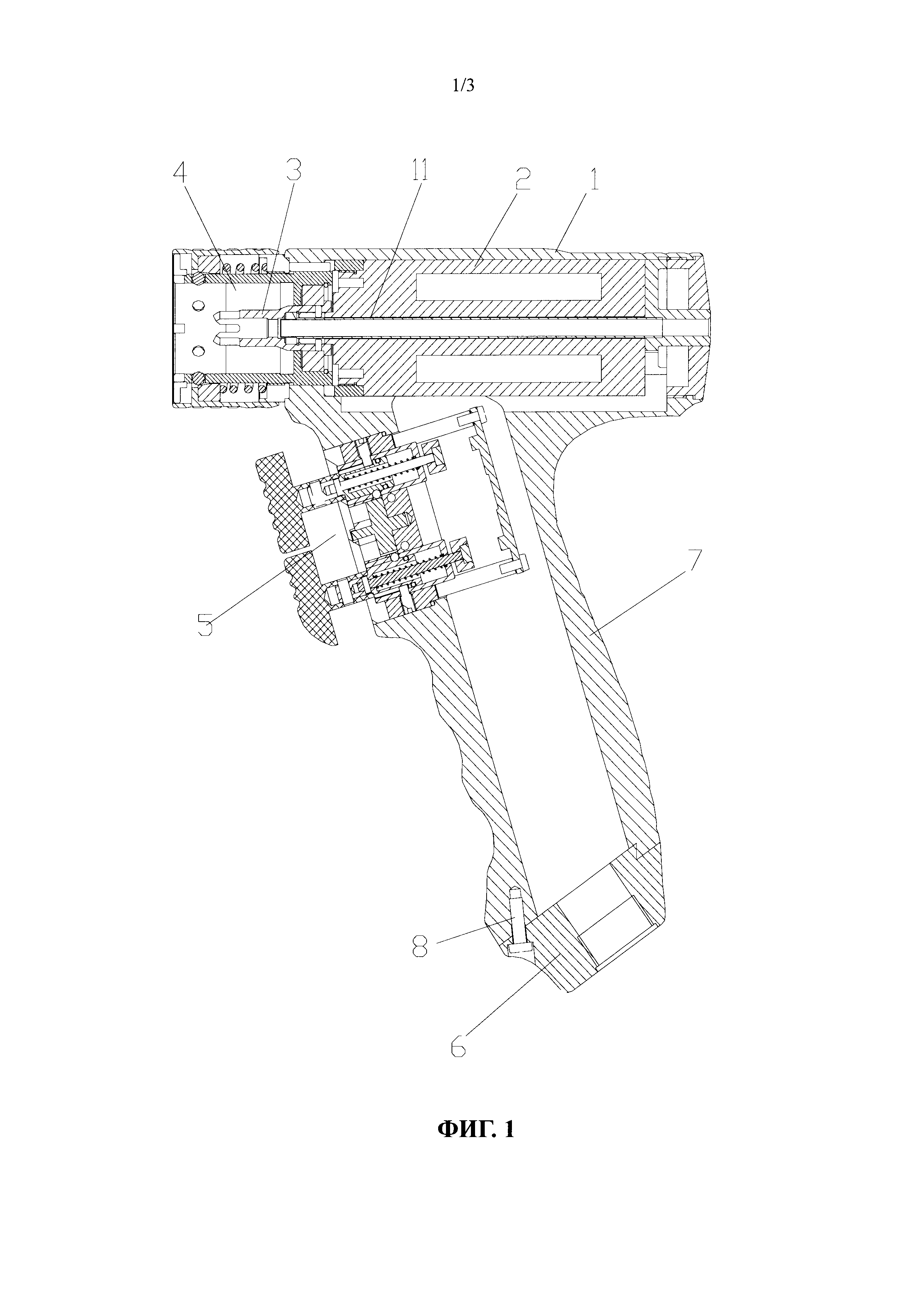
На Фиг. 1 представлено схематическое изображение, иллюстрирующее конструкцию ручного блока-пистолета с силовым приводом для сверления и перепиливания в ортопедии согласно настоящему изобретению.
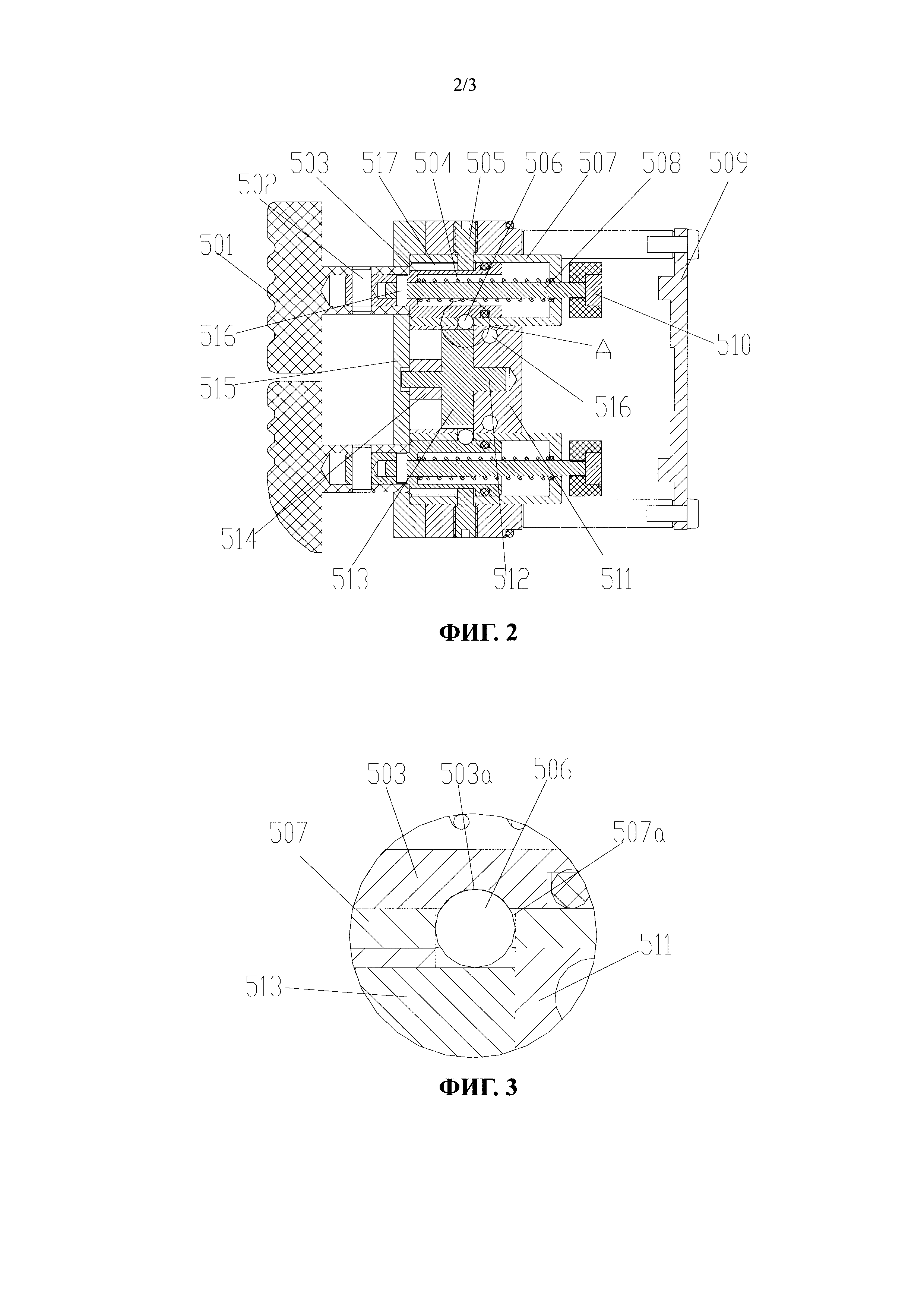
На Фиг. 2 представлено схематическое изображение, иллюстрирующее конструкцию переключателя в сборе согласно настоящему изобретению.
На Фиг. 3 показан увеличенный вид части А по Фиг. 2.
На Фиг. 4 показано перспективное изображение конструкции переключателя в сборе согласно настоящему изобретению.
На Фиг. 5 показано схематическое изображение общей конструкции силовой системы, обеспечивающей сверление и перепиливание в ортопедии.
Осуществление изобретения
Технические решения, предложенные в вариантах осуществления настоящего изобретения согласно представленной заявке, будут полностью раскрыты и понятно описаны ниже в настоящем документе в привязке к чертежам, иллюстрирующим варианты осуществления настоящего изобретения согласно представленной заявке. Очевидно, что описанные варианты реализации настоящего изобретения являются лишь частью, а не всеми вариантами осуществления настоящего изобретения согласно представленной заявке. Все прочие варианты осуществления заявленного изобретения, основанные на вариантах, представленных в настоящем документе, реализованные специалистами в данной области техники без отступления от сущности заявленного изобретения, входят в объем настоящей заявки.
Варианты осуществления настоящего изобретения будут подробно описаны в привязке к чертежам.
На Фиг. 1 представлено схематическое изображение конструкции согласно настоящей заявке; на Фиг. 2 представлено схематическое изображение конструкции переключателя в сборе согласно настоящей заявке; на Фиг. 3 показан увеличенный вид части А по Фиг. 2; а на Фиг. 4 показано перспективное изображение конструкции переключателя в сборе согласно настоящей заявке.
Как показано на чертежах, ручной блок-пистолет для сверления и перепиливания в ортопедии согласно этому варианту осуществления настоящего изобретения включает в себя, по меньшей мере, корпус 1 рукоятки, зажимное устройство 4 для захвата сборного режущего инструмента, приводной электродвигатель 2 для генерирования мощности и приведения в действие сборного режущего инструмента с целью выполнения операций по сверлению и перепиливанию, а также переключатель 5 в сборе для управления выходной мощностью приводного электродвигателя 2; при этом приводной электродвигатель 2 подключен к внешнему источнику питания. Обычно сборной режущий инструмент включает в себя собственно режущий инструмент, передаточный элемент режущего инструмента и посадочное гнездо. Зажимное устройство 4 представляет собой узел, предназначенный для установки сборного режущего инструмента, в котором могут быть реализованы любые механические конструкции стандартного типа, выполняющие функцию зажима. Ввиду того, что режущие инструменты обычно характеризуются зажимами универсальной конструкции и могут в большинстве случаев использовать эластичные зажимы, как это показано на фигуре, для фиксации различных функциональных шпиндельных головок используется фронтальный роликовый запорный механизм, обеспечивающий надежное соединение, который выполнен по стандартной технологии, и поэтому не описан в настоящем документе.
В этом варианте осуществления настоящего изобретения приводной электродвигатель 2 подключен к внешней системе управления, выполненной с возможностью управления режимами работы приводного электродвигателя 2 с помощью переключателя 5 в сборе. Система управления выполнена с возможностью приведения в действие приводного электродвигателя 2, заставляя его вращаться в положительном направлении, в обратном направлении, а также совершать вращения вперед и назад, используя переключатель в сборе. Используя внешний источник питания и внешнюю систему управления, а также задав установленный технологический процесс, система управления может регулировать вращение приводного электродвигателя в указанных направлениях по командам с переключателя в сборе и приспосабливать работу указанного электродвигателя к действиям, необходимым в ортопедической хирургии, изменяя тем самым текущее состояние отдельной функции и простого действия традиционной технологии. Система управления представляет собой блок управления с центральным процессором, и она может быть реализована на базе стандартной технологии электрического устройства автоматического управления.
В этом варианте осуществления настоящего изобретения приводной электродвигатель 2 снабжен валом ротора, который представляет собой полый в осевом направлении вал ротора; предусмотрен передаточный зубчатый захват 3, соединенный со сборным режущим инструментом с возможностью приведения его в действие, а также соединенный с валом ротора также с возможностью приведения его в действие; при этом полый вал ротора сообщается с зубчатым захватом 3 в продольном направлении. За счет использования полого вала ротора настоящее изобретение обладает достаточной универсальностью и может быть использовано для управления более длинными сборными режущими инструментами, такими как спицы Киршнера. Конечно, ручной блок-пистолет с силовым приводом согласно данному решению подходит также под различные шпиндельные головки 40 других форм, включая шпиндельную головку горизонтальной маятниковой пилы, шпиндельную головку реципрокной пилы, шпиндельную головку пилы для грудины, сверлильный патрон, шпиндельную головку зенковального и опиловочного аппарата, спицу Киршнера и тому подобное; таким образом, врач может выбрать любую шпиндельную головку в зависимости от требований к порядку проведения операции с тем, чтобы использовать «один аппарат с множеством головок», а требования к большинству операций в сфере ортопедической хирургии могут быть удовлетворены путем закрепления различных оконечных режущих инструментов.
В этом варианте осуществления настоящего изобретения переключатель 5 в сборе включает в себя, по меньшей мере, направляющую штангу 508, регулирующий механизм направляющей штанги и сенсорный элемент 809 направляющей штанги.
Предусмотрено две направляющие штанги 508, которые размещены в соответствующих гнездах 507 для направляющих штанг; эти две направляющие штанги 508 совершают скользящие возвратно-поступательные движения в осевом направлении вдоль соответствующих гнезд 507 для направляющих штанг; на боковой стенке направляющего канала каждого гнезда 507 для направляющей штанги предусмотрено сквозное радиальное отверстие 507а, а направляющий канал гнезда 507 для направляющей штанги выполнен с возможностью прохождения через него соответствующей направляющей штанги 508. В сквозном радиальном отверстии установлен ролик 506 с возможностью скольжения. Длина сквозного радиального отверстия 507а меньше диаметра ролика 506, и направляющая штанга 508 выполнена с возможностью запирания в осевом направлении за счет проскальзывания ролика 506 внутрь. Две направляющие штанги 508 переключателя в сборе характеризуются одинаковой конструкцией, а также наличием одинаковых составных частей, поэтому они обозначены одинаковыми номерами позиций.
Регулирующий механизм направляющей штанги содержит подвижный блок 513, способный вращаться вокруг оси параллельно направляющим штангам 508; ролики 506 двух направляющих штанг 508 расположены таким образом, чтобы быть обращенными непосредственно в сторону подвижного блока 513; подвижный блок 513 характеризуется двумя кольцевыми волнообразными участками 513а и 513b, которые соответствуют роликам 506; указанные кольцевые волнообразные участки 513а и 513b приводятся в действие за счет вращения подвижного блока 513 для сообщения движения роликам 506, которые начинают перемещаться вдоль соответствующих сквозных радиальных отверстий 507а.
За счет конструкции двух кольцевых волнообразных участков 513а приводятся в действие ролики 506, расположенные с обеих сторон этих участков, для одновременного запирания соответствующих направляющих штанг 508, одновременного высвобождения соответствующих направляющих штанг 508 или запирания одной из направляющих штанг 509 и высвобождения другой направляющей штанги 508 в одно и то же время. Сенсорный элемент направляющих штанг 508 выполнен с возможностью приема сигналов о перемещении двух направляющих штанг 508 и передачи полученных сигналов о перемещении на внешнюю систему управления. По полученным сигналам о перемещении двух направляющих штанг 508 система управления передает команду на вращение приводному электродвигателю для задания одного из четырех режимов работы согласно сигналам о перемещении направляющих штанг 508; при этом к четырем режимам работы относятся: состояние полной блокировки, вращение в положительном направлении, вращение в обратном направлении и вращательные движения вперед и назад; таким способом реализуется цель настоящего изобретения. Возвратно-поступательное движение двух направляющих штанг может регулироваться за счет взаимодействия двух кольцевых волнообразных участков 513а и роликов двух направляющих штанг 508. В частности, состояние полной блокировки представляет собой состояние, в котором выступы двух кольцевых волнообразных участков 513а и 513b одновременно воздействуют на ролики двух направляющих, и в этом состоянии две направляющие штанги 508 не могут перемещаться. Выступ одного из кольцевых волнообразных участков 513а и 513b воздействует на ролик соответствующей направляющей штанги, в результате чего эта направляющая штанга оказывается заблокированной и больше не может перемещаться; а выемка другого кольцевого волнообразного участка совмещается с роликом другой направляющей штанги, обеспечивая возможность перемещения этой направляющей штанги; иными словами, система управления перемещениями передает сигнал на приведение в действие приводного электродвигателя, инициируя его вращение в положительном или обратном направлении и наоборот. Полностью разблокированное состояние представляет собой состояние, в котором выемки двух кольцевых волнообразных участков одновременно совмещаются с роликами двух направляющих штанг; и в этом состоянии можно одновременно оказывать воздействие на две направляющие штанги и перемещать их; при этом в систему управления перемещениями посылается сигнал, инициирующий приведение в действие приводного электродвигателя, который начинает вращаться вперед и назад. Конечно, для реализации указанных процессов требуются алгоритмы, заложенные в систему управления.
В этом варианте осуществления настоящего изобретения две направляющие штанги 508 размещены симметрично с двух сторон подвижного блока, а два кольцевых волнообразных участка 513а и 513b характеризуются наличием выступов, расположенных напротив друг друга в радиальном направлении; выемок, расположенных напротив друг друга в радиальном направлении; а также выступа и выемки, которые также расположены напротив друг друга в радиальном направлении. Благодаря такой симметричной конструкции переключатель в сборе согласно настоящему изобретению характеризуется компактностью; можно легко выполнить кольцевые волнообразные участки на подвижном блоке; и могут быть без труда реализованы четыре рабочих режима.
В этом варианте осуществления настоящего изобретения втулка 530 направляющей штанги жестко закреплена на направляющей штанге 508 в продольном направлении. Как показано на чертежах, направляющая штанга 508 и втулка 503 направляющей штанги соединены с помощью цилиндрического штифта 516, проходящего через два указанных элемента в радиальном направлении. Возвратная пружина 504, оказывающая возвратное усилие предварительного натяжения на гнездо направляющей штанги, расположена между гнездом 507 направляющей штанги и втулкой 503 направляющей штанги. Как показано на фигурах, возвратная пружина 504 надета на втулку направляющей штанги 508 и имеет два конца, упирающихся, соответственно, в нижнюю часть гнезда 507 направляющей штанги и уступ, образованный внутренним отверстием втулки 503 направляющей штанги. Втулка 503 направляющей штанги также выполняет функцию гнезда пружины направляющей штанги. Боковая стенка втулки 503 направляющей штанги снабжена осевой канавкой 517. В боковую стенку направляющего канала седла 507 направляющей штанги радиально вкручен направляющий винт 505, который заходит в указанную осевую канавку 517. Осевая нижняя часть осевой канавки 517 представляет собой глухой конец, упирающийся в направляющий винт 505 за счет действия усилия предварительного натяжения возвратной пружины 504. Втулка 503 направляющей штанги снабжена блокирующей выемкой 503а под ролик 506 для предотвращения перемещения направляющей штанги 508 в продольном направлении, т.е. ролик 506 перемещается в радиальном направлении и попадает в блокирующую выемку 503а соответствующей втулки 503 направляющей штанги, блокируя тем самым перемещение направляющей штанги 508 в осевом направлении. Как показано на фигурах, для взаимодействия с втулкой 503 направляющей штанги предусмотрена кнопка 501; при этом кнопка 501 снабжена отводом, с помощью которого кнопка 501 может быть надета на втулку 503 направляющей штанги; кнопка 501 и втулка 503 направляющей штанги соединены друг с другом посредством цилиндрического штифта 502, который проходит через указанные два элемента в радиальном направлении.
В этом варианте осуществления настоящего изобретения гнезда 507 направляющих штанг неподвижно закреплены в гнезде 511 переключателя. Как показано на фигурах, гнездо 511 переключателя и гнездо 507 направляющей штанги зафиксированы по оси направляющим винтом 505, проходящим через оба эти элемента, и плотно прижаты прижимной крышкой 515, образуя необходимое жесткое соединение. Конечно, в качестве способа закрепления может быть использован любой существующий способ фиксации механическими средствами, который может обеспечить жесткое соединение. Вдоль оси неподвижного блока идет шпиндель 512 подвижного блока, и в этом варианте осуществления настоящего изобретения шпиндель 512 подвижного блока и сам подвижный блок 513 образуют единое целое. Шпиндель 512 подвижного блока расположен в гнезде 511 переключателя и выполнен с возможностью взаимодействия с гнездом 511 переключателя с возможностью вращения. Как показано на чертежх, шпиндель 512 подвижного блока заходит в отверстие вала, выполненное в гнезде 511 переключателя, для взаимодействия с гнездом 511 переключателя с возможностью вращения. Подвижный блок 513 требует наличия ручки управления, и - как показано на чертежах - такая ручка 514 управления подвижным блоком предусмотрена. Эта ручка 514 управления подвижным блоком жестко соединена со шпинделем 512 подвижного блока в направлении вдоль окружности. Ручка 514 управления подвижным блоком расположена симметрично относительно оси шпинделя 512 подвижного блока и характеризуется наличием двух концов, представляющих собой соответствующие приводные концы. Во время работы два приводных конца могут одновременно приводиться в действие двумя пальцами; таким образом, можно обеспечить устойчивое управление подвижным блоком. Конечно, чтобы обеспечить прерывистость во время воздействия на ручку 514 управления подвижным блоком, и чтобы оператор мог почувствовать управляемость этой ручки, подвижный блок может быть снабжен устройством фиксации положения передачи и пружиной, которые предусмотрены традиционной технологией и не описаны в настоящем документе.
Гнездо 511 переключателя герметично зафиксировано в корпусе 1 рукоятки. Во время сборки устанавливаются все необходимые уплотняющие элементы, такие как уплотнительные кольца, которые обозначены на чертежах. Эти уплотняющие элементы представляют собой стандартные уплотняющие детали, которые не описаны в настоящем документе. Неподвижное соединение может быть реализовано с помощью простого штифтового соединения; и для обеспечения такого штифтового соединения может быть предусмотрен, например, цилиндрический штифт 516, показанный на фигурах. Направляющая штанга 508 заходит внутрь корпуса 1 рукоятки и выступает из гнезда 507 направляющей штанги; конец направляющей штанги 508, выступающий из гнезда 507 направляющей штанги, снабжен сенсорной головкой 510. Сенсорный элемент 509 направляющей штанги может представлять собой сенсорную схемную плату, которая расположена в корпусе 1 рукоятки, жестко соединена с гнездом 511 переключателя и адаптирована под сенсорную головку 510. Для выполнения поставленной задачи в сенсорной головке 510 и сенсорной схемной плате могут быть использованы существующие устройства обычного типа, например, бесконтактная система переключений (с использованием магнитной индукции и т.п.), сенсорная система Холла и иные устройства, которые применяются на известном уровне развития техники и не описаны в настоящем документе. Другими словами, кнопка переключателя в сборе может управляться датчиком Холла и система управления может приводить в действие приводной электродвигатель, заставляя его вращаться в положительном направлении, в обратном направлении, совершать вращения вперед и назад, а также бесступенчато регулировать скорость вращения приводного двигателя, используя переключатель в сборе.
В этом варианте осуществления настоящего изобретения корпус 1 рукоятки имеет наладонную часть 7. Гнездо 6 для кабеля, выполненное с возможностью заводки кабеля и его фиксации, неподвижно соединено с концом наладонной части 7 рукоятки. Боковая сторона наружной поверхности передней части гнезда 6 для кабеля снабжена утопленной площадкой для выполнения соединения типа «ласточкин хвост», а внутренняя поверхность конца наладонной части снабжена утопленной канавкой для выполнения соединения типа «ласточкин хвост», выполненной с возможностью вхождения в зацепление с утопленной площадкой для выполнения соединения типа «ласточкин хвост». Другая боковая сторона наружной поверхности передней части гнезда для кабеля жестко соединена с концом наладонной части с помощью винта 8. С помощью такой конструкции соединения типа «ласточкин хвост» с парой взаимозамыкающихся деталей во время сборки одна часть пары должна войти в другую, а другая часть пары закрепляется с помощью единственного винта 8, что просто и легко выполнить.
В этом варианте осуществления настоящего изобретения приводной электродвигатель 2 установлен в корпусе 1 рукоятки. В полом валу приводного электродвигателя 2 предусмотрена трубчатая втулка 11, расположенная на одной оси с указанным полым валом, предназначенная для предотвращения высокоскоростного трения между внутренним отверстием полого вала ротора и режущим инструментом, глубоко заходящим в полый вал, таким как спица Киршнера. Передняя часть передаточного зубчатого захвата 3 имеет конструкцию в виде треугольного зуба, и в собранном виде такая конструкции хорошо совмещается со шлицами на хвостовике режущего инструмента; таким образом, сборка и передача вращения могут быть реализованы без какой-либо центровки.
В соответствии с приведенным выше описанием конструкции и принципа действия системы управления согласно настоящему изобретению при осуществлении управления от внешнего источника питания и внешней системы управления, в сочетании с использованием переключателя двухкнопочной конструкции, может быть реализовано четыре рабочих режима, включая полностью заблокированное состояние, вращение в положительном направлении, вращение в обратном направлении, а также вращение вперед и назад.
В сравнении с традиционной технологий настоящее изобретение характеризуется меньшим объемом, уменьшенной массой и более низким показателем теплотворной способности, а также может обеспечить бесперебойность работы во время операций. Более того, рабочий режим может свободно регулироваться, что облегчает управление и дает терапевтический эффект.
Помимо описанного выше ручного блока-пистолета с силовым приводом для сверления и перепиливания в ортопедии, настоящее изобретение предлагает также силовую систему, обеспечивающую сверление и перепиливание в ортопедии, в состав которой входит указанный блок-пистолет. В этой связи дана ссылка на Фиг. 5, на которой представлено схематическое изображение, иллюстрирующее общую конструкцию силовой системы, обеспечивающей сверление и перепиливание в ортопедии согласно настоящему изобретению.
Силовая система, обеспечивающая сверление и перепиливание в ортопедии, включает в себя основное устройство 10; ножной контроллер 20, соединенный с основным устройством 10; ручной блок-пистолет 30 с силовым приводом для сверления и перепиливания в ортопедии, соединенный с основным устройством 10; и соответствующие шпиндельные головки 40, выполняющие различные функции. Ручной блок-пистолет 30 с силовым приводом для сверления и перепиливания в ортопедии представляет собой ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии, описанный выше. Во время операции врач может выдавать через переключатель 5 в сборе соответствующие рабочие команды ручному блоку-пистолету с силовым приводом для сверления и перепиливания в ортопедии, или же выдавать эти же рабочие команды с помощью ножного переключателя на ножной контроллер 20, а затем осуществлять управление рабочим режимом приводного электродвигателя 2 через систему управления, предусмотренную в основном устройстве 10.
Следует отметить, что на базе традиционной технологии могут быть реализованы особые конфигурации ножного контроллера 20 и основного устройства 10, не описанные в настоящем документе. Следует понимать, что любая система, в которой используется ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии согласно настоящему изобретению, попадает в объем настоящей заявки.
Варианты осуществления настоящего изобретения, описанные выше, представляют собой лишь предпочтительные варианты реализации заявленного изобретения. Следует отметить, что для специалиста в данной области техники очевидно, что лишь незначительное количество модификаций или усовершенствований может быть внесено без отступления от сущности настоящего изобретения, и эти модификации и усовершенствования должны входить в объем настоящей заявки.
Реферат
Группа изобретений относится к медицинской технике, в частности к ручному блоку-пистолету для сверления и перепиливания в ортопедии, а также к силовой системе, обеспечивающей сверление и перепиливание в ортопедии с помощью блока-пистолета, которые используются при хирургических операциях. Ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии содержит, по меньшей мере, корпус рукоятки, зажимное устройство для захвата сборного режущего инструмента, приводной электродвигатель для генерирования мощности и приведения в действие сборного режущего инструмента с целью выполнения операций по сверлению и перепиливанию и переключатель в сборе для управления выходной мощностью приводного электродвигателя. Приводной электродвигатель подключен к внешнему источнику питания. Приводной электродвигатель соединен с внешней системой управления, выполненной с возможностью управления режимом работы приводного электродвигателя с помощью переключателя в сборе, и система управления выполнена с возможностью приведения в действие приводного электродвигателя для его вращения в положительном направлении, обратном направлении, а также вращения вперед и назад, используя переключатель в сборе. Переключатель в сборе включает в себя, по меньшей мере, направляющую штангу, регулирующий механизм направляющей штанги и сенсорный элемент направляющей штанги. При этом предусмотрены две направляющие штанги, которые размещены в соответствующих гнездах для направляющих штанг. Две направляющие штанги совершают скользящие возвратно-поступательные движения в осевом направлении вдоль соответствующих гнезд для направляющих штанг. На боковой стенке направляющего канала каждого гнезда для направляющей штанги предусмотрено сквозное радиальное отверстие, а направляющий канал гнезда для направляющей штанги выполнен с возможностью прохождения через него соответствующей направляющей штанги. В сквозном радиальном отверстии установлен ролик с возможностью скольжения, длина сквозного радиального отверстия меньше диаметра ролика, и направляющая штанга выполнена с возможностью запирания в осевом направлении за счет проскальзывания ролика внутрь. При этом регулирующий механизм направляющей штанги содержит подвижный блок, способный вращаться вокруг оси параллельно направляющим штангам. Ролики двух направляющих штанг расположены таким образом, чтобы быть обращенными непосредственно в сторону подвижного блока. Подвижный блок характеризуется двумя кольцевыми волнообразными участками под ролики. Кольцевые волнообразные участки выполнены с возможностью приведения в действие за счет вращения подвижного блока для сообщения движения роликам, которые начинают перемещаться вдоль соответствующих сквозных радиальных отверстий. При этом конструкция двух кольцевых волнообразных участков выполнена с возможностью приведения в действие роликов с обеих сторон этих участков для одновременного запирания соответствующих направляющих штанг, одновременного высвобождения соответствующих направляющих штанг или запирания одной из направляющих штанг и высвобождения другой направляющей штанги в одно и то же время. И при этом сенсорный элемент направляющей штанги выполнен с возможностью получения сигналов о перемещении двух направляющих штанг и передачи полученных сигналов о перемещении внешней системе управления. Силовая система обеспечивает сверление и перепиливание в ортопедии, содержит основное устройство, ножной контроллер, соединенный с основным устройством, и вышеуказанный ручной блок-пистолет с силовым приводом для сверления и перепиливания в ортопедии, соединенный с основным устройством. Изобретения позволяют обеспечить бесперебойную работу устройства, уменьшение общей массы устройства, облегчение управления и повышение эффективности эксплуатации. 2 н. и 7 з.п. ф-лы, 5 ил.
Комментарии