Устройства переключения для ультразвуковых хирургических инструментов - RU2648854C2
Код документа: RU2648854C2
Чертежи































































































Описание
Заявление об установлении приоритета
Данное заявление притязает на приоритет Предварительной заявки на патент США, серийный номер 61/621,876, поданной 9 апреля 2012 года и в полном объеме зарегистрировано в настоящем документе.
Область техники
Данные сведения относятся к ультразвуковым хирургическим системам в целом и в частности к ультразвуковым и электрохирургическим системам, которые позволяют осуществлять разрезы и коагуляцию.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Ультразвуковые хирургические инструменты находят все более широкое применение в хирургических процедурах в силу уникальных характеристик производительности. В зависимости от конфигурации и рабочих параметров конкретного инструмента, с помощью ультразвуковых хирургических инструментов может производиться практически одновременный разрез тканей и остановка кровотечения путем коагуляции, что уменьшает степень травмирования организма пациента. Разрез обычно производится с помощью концевого зажима или кромки лезвия на дистальном конце инструмента, который передает ультразвуковую энергию ткани, находящейся в контакте с концевым зажимом. Ультразвуковые инструменты такого рода могут предназначаться для использования в открытой хирургии, при лапароскопических и эндоскопических хирургических процедурах, в том числе при процедурах с применением робототехники.
Некоторые хирургические инструменты используют ультразвуковую энергию как для проведения точных разрезов, так и для управляемой коагуляции. Разрезы и коагуляция при помощи ультразвуковой энергии производятся за счет более низких температур, чем в электрохирургии. Вибрируя на высоких частотах (например,55,500 раз в секунду), ультразвуковое лезвие денатурирует белок в тканях, что ведет к формированию клейкого коагулянта. Под давлением, которое оказывает на ткань поверхность лезвия, кровеносные сосуды сжимаются, а коагулянт формирует гемостатический слой. Точность разреза и коагуляция достигаются действиями хирурга и подбором нужного уровня мощности, режущей кромки, тракции ткани и давления лезвия.
Основной трудностью в использовании ультразвуковой технологии для создания медицинских приборов остается запечатывание кровеносных сосудов. Работа, проведенная заявителем и его командой, продемонстрировала, что оптимальная герметизация сосуда происходит тогда, когда внутренний мышечный слой сосуда отделяется и перемещается в направлении от адвентициальной оболочки до приложения стандартной ультразвуковой энергии. В настоящее время результатом поисков способа такого отделения стало увеличение силы зажима, применяемой к сосуду.
Кроме того, пользователь не всегда может визуально определить состояние ткани, на которой выполняется разрез. Поэтому представляется желательным обеспечить обратную связь, благодаря которой пользователь мог бы узнавать о завершении разреза в случаях, когда визуально это оценить невозможно. К тому же, при отсутствии индикатора обратной связи, свидетельствующего о завершении разреза, пользователь может продолжать активировать волновой инструмент даже если разрез уже выполнен, что может привести к повреждению волнового инструмента и прилегающей ткани, вызванному высокой температурой, которая возникает при активации волнового инструмента, между браншами которого находится небольшое количество ткани либо ткань отсутствует вообще.
Ультразвуковой датчик может быть выполнен в виде эквивалентной цепи, первая ветвь которой имеет статическую емкость, а вторая, «динамическая» ветвь - последовательно соединенные индуктивность, сопротивление и емкость, которые определяют электромеханические свойства резонатора. В состав стандартных ультразвуковых генераторов может входить регулируемый индуктор, служащий для отключения статической емкости на резонансной частоте, для того, чтобы практически весь отдаваемый ток генератора поступал в динамическую ветвь. Ток динамической ветви вместе с напряжением возбуждения определяют сопротивление и величину фазы. Так, в случае применения регулируемого индуктора, отдаваемый ток генератора представляет собой ток динамической ветви, при этом генератор может поддерживать выходную мощность привода на резонансной частоте ультразвукового датчика. Регулируемый индуктор также трансформирует кривую сопротивления фазы ультразвукового датчика для более эффективной синхронизации частоты генератором. При этом регулируемый индуктор должен соответствовать конкретной статической емкости ультразвукового датчика. Любой иной ультразвуковой датчик с иной статической емкостью требует иного регулируемого индуктора.
Электрохирургические приборы, служащие для воздействия электрической энергией на ткань в целях ее лечения и/или разрушения, также находят все более широкое применение в хирургических процедурах. В состав электрохирургического прибора обычно входит рукоятка, инструмент с дистально закрепленным концевым зажимом (например, с одним или более электродами). Концевой зажим можно сориентировать по отношению ткани таким образом, чтобы электрический ток поступал в ткань. Различают электрохирургические приборы биполярного и монополярного действия. При биполярной работе ток поступает в ткань и возвращается из нее с помощью, соответственно, активного и возвратного электродов концевого зажима. При монополярной работе ток поступает в ткань с помощью активного электрода концевого зажима, а возвращается через возвратный электрод (например, заземлитель), расположенный отдельно на теле пациента. Тепло, генерируемое током, протекающим через ткань, может образовывать гемостатическое уплотнение внутри ткани и/или между тканями и, таким образом, может быть полезно, например, для герметизации кровеносных сосудов. Концевой зажим электрохирургического прибора может также иметь режущую часть, подвижную относительно ткани, и электроды, служащие для разрезов ткани.
Электрическая энергия, применяемая в электрохирургическом инструменте, может передаваться инструменту с помощью генератора, связанного с рукояткой. Электрическая энергия может существовать в виде радиочастотной (РЧ) энергии. РЧ-энергия - это вид электрической энергии, существующей в частотном диапазоне от 300 килогерц (кГц) до 1 мегагерца (МГц). При использовании, электрохирургический прибор может передавать низкочастотную РЧ-энергию по ткани, вызывая возбуждение ионов или трение, по сути - резистивное нагревание, тем самым повышая температуру ткани. Поскольку между тканью, на которую оказывается воздействие и прилегающей тканью образуется четкая граница, хирурги могут оперировать с высокой степенью точности и контроля, не подвергая травмированию прилегающую ткань, которая не является объектом вмешательства. Низкие рабочие температуры РЧ-энергии подходят для удаления, сжатия или придания формы мягким тканям при одновременном запечатывании кровеносных сосудов. РЧ-энергия особенно хорошо работает в соединительной ткани, которая состоит преимущественно из коллагена и сокращается при контакте с теплом.
Представляется желательным создать хирургический инструмент, в котором были бы устранены недостатки существующих ныне инструментов. Описанная в настоящем документе хирургическая система лишена этих недостатков.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном аспекте изобретение раскрывает механизм переключения для ультразвукового хирургического инструмента, включающий корпус рукоятки, выполненный с возможностью его удерживания одной рукой, при этом механизм переключения включает в себя:
первое устройство переключения, которое функционально закреплено на передней части корпуса рукоятки и может выборочно поворачиваться относительно по меньшей мере одного первого контакта переключения; и
второе устройство переключения, имеющее по меньшей мере один из следующих элементов:
правая кнопка переключения, подвижно крепящаяся на правой стороне корпуса рукоятки, при этом правая кнопка переключения может выборочно поворачиваться относительно по меньшей мере одного правого контакта переключения, закрепленного в корпусе рукоятки; и
левая кнопка переключения, подвижно крепящаяся на левой стороне корпуса рукоятки, при этом левая кнопка переключения может выборочно поворачиваться относительно по меньшей мере одного левого контакта переключения, закрепленного в корпусе рукоятки, где первое и второе устройства переключения выполнены с возможностью выборочного нажатия одной рукой, в которой удерживается корпус рукоятки.
В другом аспекте изобретение раскрывает механизм переключения, где первое устройство переключения имеет первый кнопочный механизм, который может поворачиваться вокруг первой оси переключения относительно по меньшей мере двух первых контактов переключения, функционально закрепленными в корпусе рукоятки.
В другом аспекте изобретение раскрывает механизм переключения, где правая кнопка переключения поворотно закреплена относительно корпуса рукоятки для выборочного поворотного движения вокруг правой оси переключения относительно указанного по меньшей мере одного правого контакта переключения, и где левая кнопка переключения поворотно закреплена относительно корпуса рукоятки для выборочного поворотного движения вокруг левой оси переключения относительно указанного по меньшей мере одного левого контакта переключения, и где правая и левая оси переключения по существу поперечны первой оси переключения.
В другом аспекте изобретение раскрывает механизм переключения, где упомянутое второе устройство переключения имеет и правую, и левую кнопки переключения, и где правая кнопка переключения выполнена с возможностью приведения в действие с правой стороны корпуса рукоятки и выборочного поворота вокруг левой оси переключения, примыкающей к левой стороне корпуса рукоятки, и где упомянутая левая кнопка переключения выполнена с возможностью приведения в действие с левой стороны корпуса рукоятки и выборочного поворота вокруг правой оси переключения, примыкающей к правой стороне корпуса рукоятки и упомянутой правой кнопки переключения.
В другом аспекте изобретение раскрывает механизм переключения, где упомянутая правая кнопка переключения поворотно крепится к корпусу рукоятки так, что правая кнопка переключения может приводиться в действие с правой стороны корпуса рукоятки и выборочно поворачивать вокруг центральной оси переключения и где упомянутая левая кнопка переключения может приводиться в действие с левой стороны корпуса рукоятки и поворотно крепиться для выборочного поворотного движения вокруг центральной оси переключения.
В другом аспекте изобретение раскрывает механизм переключения, где первое устройство переключения имеет первый кнопочный механизм, поворачиваемый вокруг первой оси переключения относительно по меньшей мере двух первых контактов переключения, функционально крепящихся в корпусе рукоятки, и где центральная ось переключения по существу поперечна первой оси переключения.
В другом аспекте изобретение раскрывает механизм переключения, где упомянутый второй механизм переключения имеет второй привод переключателя, проходящий сбоку через часть корпуса рукоятки таким образом, что левый конец второго привода переключателя выходит наружу через левую сторону корпуса рукоятки и образует левую кнопку переключения, и где правый конец второго привода переключателя проходит наружу через правую сторону корпуса рукоятки и образует правую кнопку переключения, при этом второй привод переключателя может выборочно двигаться в боковом направлении относительно по меньшей мере одного другого контакта переключения в корпусе рукоятки.
В другом аспекте изобретение раскрывает механизм переключения, где указанный по меньшей мере один другой контакт переключения расположен в центре в корпусе рукоятки и включает в себя часть правого контакта и часть левого контакта, и где второй привод переключателя может выборочно перемещаться в боковом направлении между позицией, при которой отсутствует активация относительно правой и левой частями контакта, и правой позицией активации, где правая часть привода второго привода переключателя перемещена в боковом направлении в активирующий контакт с правой частью контакта и левой позицией активации, где левая часть привода второго привода переключателя перемещена в боковом направлении в активирующий контакт с левой частью контакта.
В другом аспекте изобретение раскрывает механизм переключения, который также имеет средство для смещения для отклонения второго привода переключателя в позицию, при которой отсутствует активация.
В другом аспекте изобретение раскрывает механизм переключения, где первое устройство переключения имеет первый кнопочный механизм, поворачиваемый вокруг первой оси переключения относительно по меньшей мере двух первых контактов переключения, функционально крепящихся в корпусе рукоятки, и где второй привод переключателя может двигаться в боковом направлении по центральной оси переключения, которая по существу параллельна первой оси переключения.
В другом аспекте изобретение раскрывает ультразвуковой хирургический инструмент, имеющий:
генератор для генерирования ультразвуковых сигналов;
рукояточный блок, включающий корпус рукоятки, выполненный с возможностью функционально удерживать его одной рукой;
механизм переключения как указано выше, причем по меньшей мере один первый контакт переключения выполнен с возможностью сообщения с генератором; причем по меньшей мере один правый контакт переключения выполнен с возможностью функционального сообщения с генератором; и
причем по меньшей мере один левый контакт переключения, выполнен с возможностью функционального сообщения с генератором.
В другом аспекте изобретение раскрывает ультразвуковой хирургический инструмент, дополнительно включающий рамку переключения, функционально прикрепленную в указанном корпусе рукоятки и поддерживающую указанный по меньшей мере один первый контакт переключения, указанный по меньшей мере один правый контакт переключения и указанный по меньшей мере один левый контакт переключения, расположенный на нем.
В другом аспекте изобретение раскрывает ультразвуковой хирургический инструмент, где первое устройство переключения содержит первый кнопочный механизм, поворотно соединенный с рамкой переключателя таким образом, что первый кнопочный механизм может поворачиваться вокруг первой оси переключателя относительно указанных по меньшей мере двух первых контактов переключателя, и где правая кнопка переключения поворотно прикреплена к рамке переключения так, что правая кнопка переключения может поворачиваться относительно нее вокруг правой оси переключения, которая по существу поперечна первой оси переключения, и где левая кнопка переключения поворотно прикреплена к рамке переключателя таким образом, что левая кнопка переключения может вращаться относительно нее вокруг левой оси переключения, которая по существу поперечна первому переключателю.
В другом аспекте изобретение раскрывает ультразвуковой хирургический инструмент, где упомянутое второе устройство переключения имеет и правую, и левую кнопки переключения, и где правая кнопка переключения выполнена с возможностью приведения в действие с правой стороны корпуса рукоятки и поворотного соединения с рамкой переключателя таким образом, что правая кнопка переключения может выборочно поворачиваться вокруг левой оси переключения, примыкающей к левой стороне корпуса рукоятки, и где упомянутая левая кнопка переключения выполнена с возможностью приведения в действие с левой стороны корпуса рукоятки и поворотного соединения с рамкой переключателя таким образом, что левая кнопка переключения выборочно поворачивается вокруг правой оси переключения, примыкающей к правой стороне корпуса рукоятки и упомянутой правой кнопке переключения.
В другом аспекте изобретение раскрывает ультразвуковой хирургический инструмент, где упомянутая правая кнопка переключения поворотно крепится к рамке переключателя таким образом, что правая кнопка переключения выполнена с возможностью приведения в действие с правой стороны корпуса рукоятки и выборочного поворота вокруг центральной оси переключения, и где упомянутая левая кнопка переключения поворотно соединена с рамкой переключения так, что упомянутая левая кнопка переключения выполнена с возможностью приведения в действие с левой стороны корпуса рукоятки поворотного прикрепления для выборочного поворотного движения вокруг центральной оси переключения.
В другом аспекте изобретение раскрывает ультразвуковой хирургический инструмент, где упомянутый второй механизм переключения имеет второй привод переключателя, проходящий сбоку через часть корпуса рукоятки таким образом, что левый конец второго привода переключателя выходит наружу через левую сторону корпуса рукоятки и образует левую кнопку переключения, и где правый конец второго привода переключателя проходит наружу через правую сторону корпуса рукоятки и образует правую кнопку переключения, при этом второй привод переключателя может выборочно двигаться в боковом направлении относительно по меньшей мере одного другого контакта переключения.
В другом аспекте изобретение раскрывает ультразвуковой хирургический инструмент, где указанный по меньшей мере один другой контакт переключателя расположен в центре в корпусе рукоятки и включает в себя правую часть контакта и левую часть контакта, и где второй привод переключателя может выборочно перемещаться в боковом направлении между позицией, при которой отсутствует активация, относительно правой и левой частей контакта и правой позицией активации, где второй привод переключателя перемещен в боковом направлении в активирующий контакт с правой частью контакта и левой позицией активации, где второй привод переключателя перемещен в боковом направлении в активирующий контакт с левой частью контакта.
В другом аспекте изобретение раскрывает механизм переключения для ультразвукового хирургического инструмента, имеющий корпус рукоятки, выполненный с возможностью его удерживания одной рукой, механизм переключения имеющий кнопочный механизм, который подвижно крепится к корпусу рукоятки для выборочного осевого и поворотного движения относительно первого контакта переключения, центрального контакта переключения, правого контакта переключения и левого контакта переключения так, что осевое движение кнопочного механизма в первом направлении приводит к тому, что кнопочный механизм активирует центральный контакт переключения, а поворотное движение кнопочного механизма в первом направлении поворота приводит к тому, что кнопочный механизм активирует левый контакт переключения, а поворотное движение кнопочного механизма во втором направлении поворота приводит к тому, что кнопочный механизм активирует правый контакт переключения.
В другом аспекте изобретение раскрывает механизм переключения для ультразвукового хирургического инструмента, где указанный кнопочный механизм включает в себя:
корпус переключателя, закрепленный в корпусе рукоятки, при этом корпус переключателя образует продолговатый паз, который открывается в отверстие привода;
центральный переключатель, связанный с центральной частью отверстия привода, которое по существу выровнено по оси с продолговатым пазом;
правый переключатель, связанный с правой частью отверстия привода;
левый переключатель, связанный с левой частью отверстия привода;
кнопка привода;
рычаг держателя кнопок, выступающий из кнопки привода и включающий в себя центральную часть привода, правую часть привода переключателя и левую часть привода переключателя;
по меньшей мере один поворотный элемент, выступающий из рычага держателя кнопок, который может смещаться внутри продолговатого паза вращательно и по оси.
В другом аспекте изобретение раскрывает механизм переключения для ультразвукового хирургического инструмента, который также имеет элемент отклонения для по существу осевой центровки рычага держателя кнопок по отношению к удлиненному пазу, когда рычаг держателя кнопок находится в неактивированном положении.
ФИГУРЫ
Принципиально новые характеристики описанных вариантов изобретения подробно объясняются в прилагаемых формулах изобретения. Однако с точки зрения конструкции и способов функционирования, описанные варианты станут более понятными из представленного ниже описания со ссылками на прилагаемые рисунки, где:
ФИГ. 1 - перспективное изображение, иллюстрирующее один вариант ультразвукового хирургического инструмента.
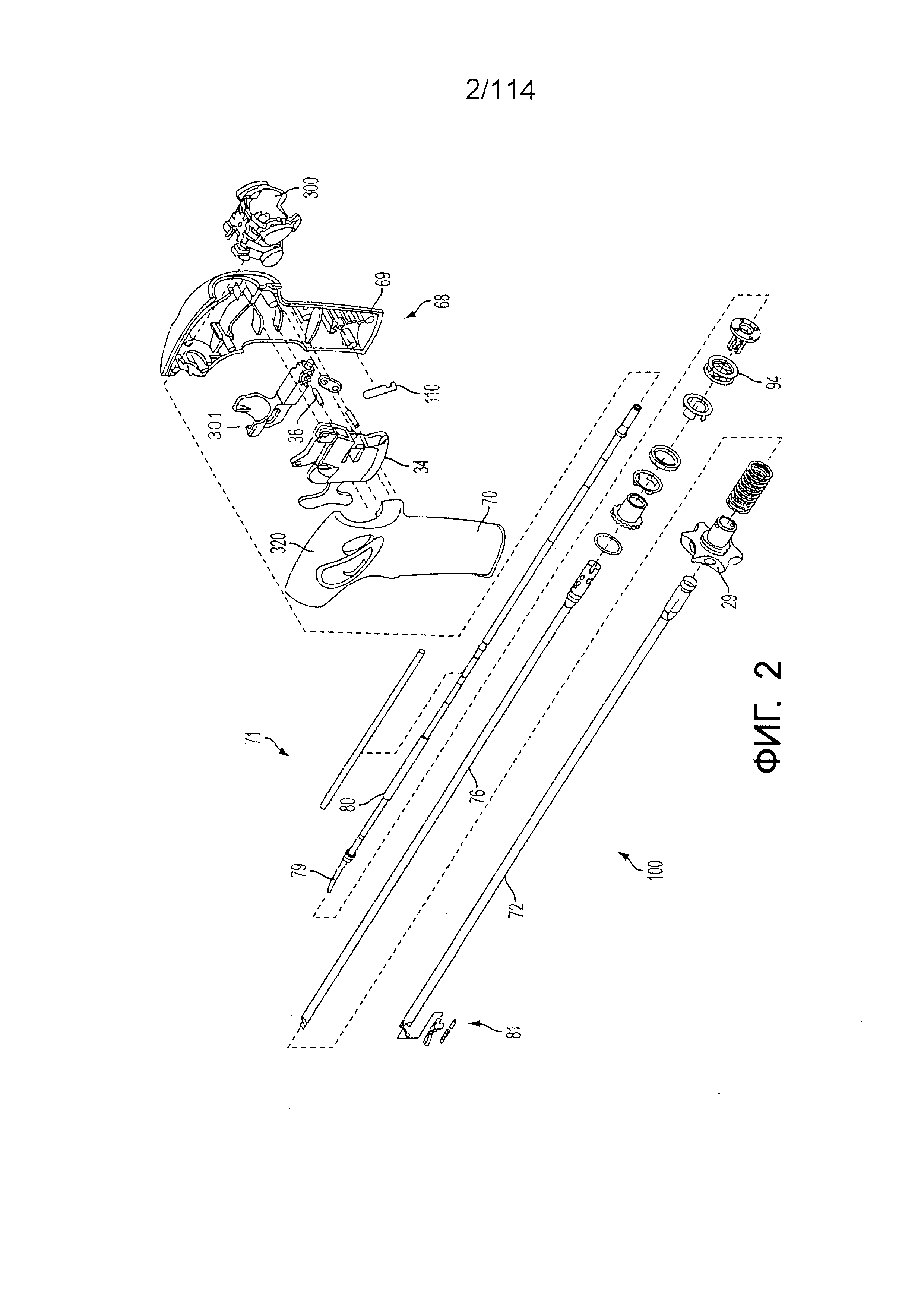
ФИГ. 2 - изображение ультразвукового хирургического инструмента в разобранном перспективном виде.
ФИГ. 3 - план одного варианта зажимного рычага, на котором представлены расчеты силы.
ФИГ. 4 - графическое представление кривых тока, напряжения, мощности, сопротивления и частоты обычного осциллятора, работающего на высокой мощности в условиях малой нагрузки.
ФИГ. 5 - графическое представление кривых тока, напряжения, мощности, сопротивления и частоты обычного осциллятора, работающего на высокой мощности в условиях высокой нагрузки.
ФИГ. 6 - графическое представление кривой ступенчатой функции тока и кривых напряжения, мощности, сопротивления и частоты одного варианта осциллятора, работающего без нагрузки.
ФИГ. 7 - графическое представление кривой ступенчатой функции тока и кривых напряжения, мощности, сопротивления и частоты одного варианта осциллятора, работающего в условиях малой нагрузки.
ФИГ. 8 - графическое представление кривой ступенчатой функции тока и кривых напряжения, мощности, сопротивления и частоты одного варианта осциллятора, работающего в условиях высокой нагрузки.
На ФИГ. 9 изображен один вариант механизма привода генератора, который создает ультразвуковой электрический сигнал, служащий для приведения в действие ультразвукового датчика.
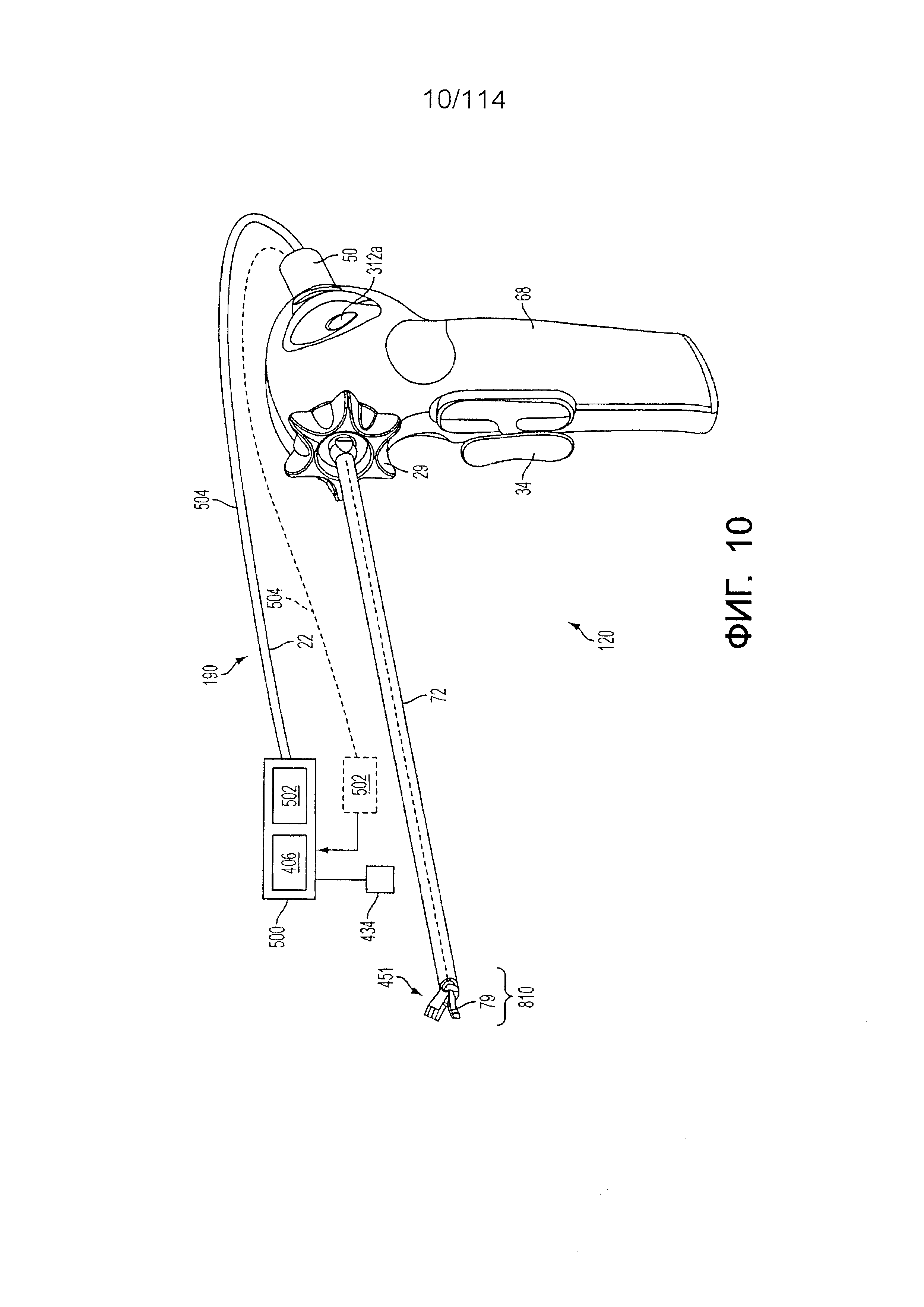
На ФИГ. 10 изображен один вариант хирургической системы, состоящей из ультразвукового хирургического инструмента и генератора, в состав которого входит модуль сопротивления ткани.
На ФИГ. 11 изображен один вариант механизма привода генератора, в состав которого входит модуль сопротивления ткани.
На ФИГ. 12 изображен один вариант механизма зажимного рычага, который может использоваться с хирургической системой.
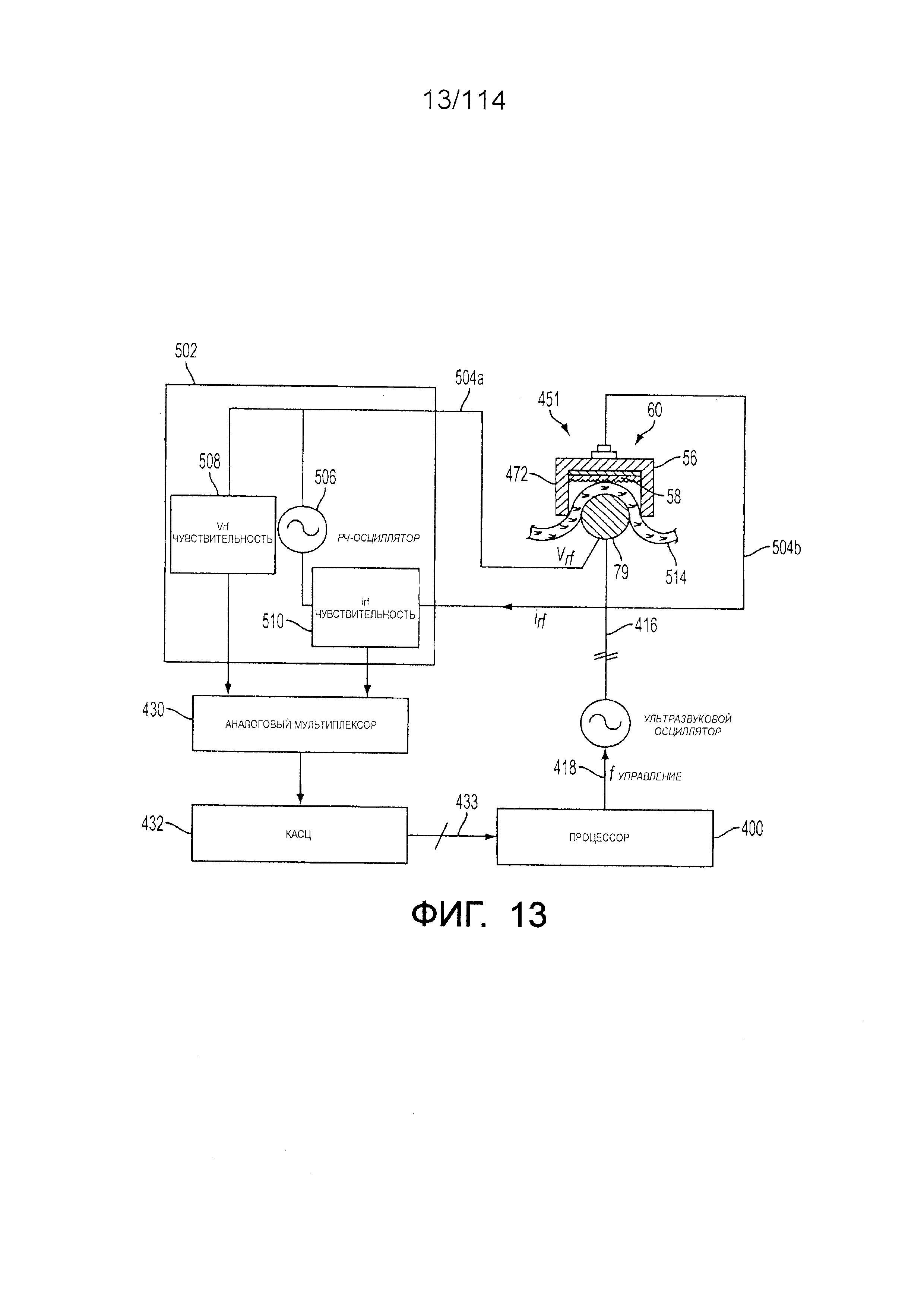
На ФИГ. 13 представлена схема модуля сопротивления ткани, соединенного с лезвием и механизмом зажимного рычага, с тканью, расположенной между ними.
На ФИГ. 14 изображен один вариант способа приведения в действие концевого зажима, соединенного с ультразвуковой системой привода хирургического инструмента.
На ФИГ. 15A изображена логическая схема одного варианта определения изменений в состоянии ткани и активации в связи ними выходного индикатора.
На ФИГ. 15B представлена логическая схема, иллюстрирующая вариант работы модуля анализа точки перегиба частотной кривой.
На ФИГ. 15C представлена логическая схема 900, иллюстрирующая вариант работы модуля анализа перепада напряжения.
На ФИГ. 16 изображен вариант хирургической системы, в состав которой входит генератор и различные хирургические инструменты, подходящие для использования с ней.
На ФИГ. 16A представлен чертеж ультразвукового хирургического инструмента, изображенного на ФИГ. 16.
На ФИГ. 17 представлена схема хирургической системы, изображенной на ФИГ. 16.
На ФИГ. 18 представлена модель, иллюстрирующая ток динамической ветви в одном из вариантов.
На ФИГ. 19 представлен структурный вид архитектуры генератора в одном из вариантов.
На ФИГ. 20 представлена логическая схема алгоритма ткани, который может использоваться в одном из вариантов, генератора.
На ФИГ. 21 представлена логическая схема части алгоритма ткани, показанного на ФИГ. 20, отвечающая за оценку характеристик сигнала алгоритма ткани, которая может использоваться в одном из вариантов, генератора.
На ФИГ. 22 представлена логическая схема для оценки наборов условий для оценки характеристик сигнала алгоритма ткани, показанного на ФИГ. 21, которая может использоваться в одном из вариантов, генератора.
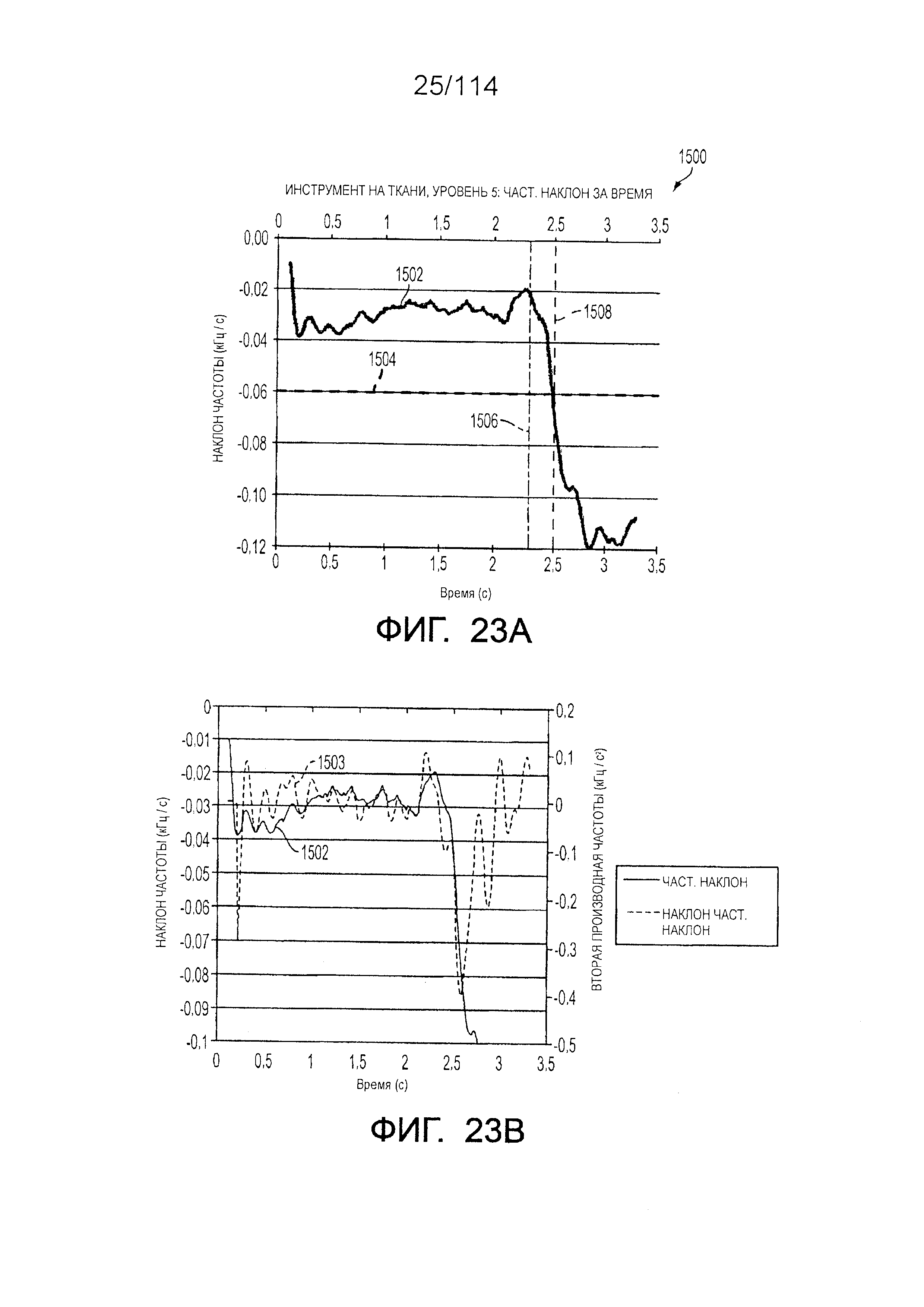
На ФИГ. 23A представлен график зависимости наклона частоты (первая производная частоты по времени) от времени в одном из вариантов, генератора при обычном разрезании ткани.
На ФИГ. 23B представлен график зависимости изменения наклона частоты (вторая производная частоты по времени) от времени, показанный пунктиром поверх кривой, показанной на ФИГ. 23A, в одном из вариантов, генератора при обычном разрезании ткани.
На ФИГ. 24 представлено отношение графика частоты как функции времени одного из вариантов генератора при обычном разрезании ткани к графику, изображенному на ФИГ. 23A.
На ФИГ. 25 представлено отношение графика мощности привода как функции времени в одном из вариантов, генератора при обычном разрезании ткани к графику, изображенному на ФИГ. 23A.
На ФИГ. 26 представлен график наклона частоты как функции времени в одном из вариантов, генератора при приработке.
На ФИГ. 27 представлено отношение графика частоты как функции времени одного из вариантов генератора при приработке к графику, изображенному на ФИГ. 26.
На ФИГ. 28 представлено отношение графика зависимости потребляемой мощности от времени в одном из вариантов, генератора при приработке к графику на ФИГ. 26.
На ФИГ. 29 представлен график изменения частоты с течением времени для нескольких комбинаций генератора и инструмента при приработочных испытаниях.
На ФИГ. 30 представлены кривые нормированных сопротивления, тока, частоты, мощности, энергии и температуры одного из вариантов генератора с подсоединенным к нему ультразвуковым инструментом при проведении десяти последовательных разрезов на фрагменте ткани свиной тонкой кишки максимально быстро при непрерывно работающем генераторе.
На ФИГ. 31A представлен график зависимости сопротивления и тока от времени в одном из вариантов, генератора при выполнении последовательных разрезов ткани за период времени.
На ФИГ. 31B представлен график зависимости частоты от времени в одном из вариантов, генератора при выполнении последовательных разрезов ткани за период времени.
На ФИГ. 31C представлены графики зависимости мощности, энергии и температуры от времени в одном из вариантов, генератора при выполнении последовательных разрезов ткани за период времени.
На ФИГ. 32 представлен комбинированный график частоты, взвешенного наклона частоты, рассчитанных с помощью экспоненциально взвешенного скользящего среднего с альфа-фактором 0,1, и график зависимости температуры от времени в одном из вариантов, генератора.
На ФИГ. 33 представлен график зависимости частоты от времени, показанный на ФИГ. 32.
На ФИГ. 34 представлен график зависимости взвешенного наклона частоты от времени, представленный на ФИГ. 32.
На ФИГ. 35 представлен график зависимости частоты от времени в одном из вариантов, генератора в ходе выполнения десяти разрезов на ткани тонкой кишки, а также график зависимости температуры от времени.
На ФИГ. 36 представлена кривая зависимости частоты от времени, показанная на ФИГ. 35, в одном из вариантов, генератора в ходе выполнения десяти разрезов на ткани тонкой кишки при активации с вмешательством в ткань.
На ФИГ. 37 представлена кривая зависимости наклона частоты от времени в одном из вариантов, генератора в ходе выполнения десяти разрезов на ткани тонкой кишки.
На ФИГ. 38 представлена кривая зависимости мощности от времени, отражающая потребляемую мощность одного из вариантов генератора в ходе выполнения десяти разрезов на ткани тонкой кишки.
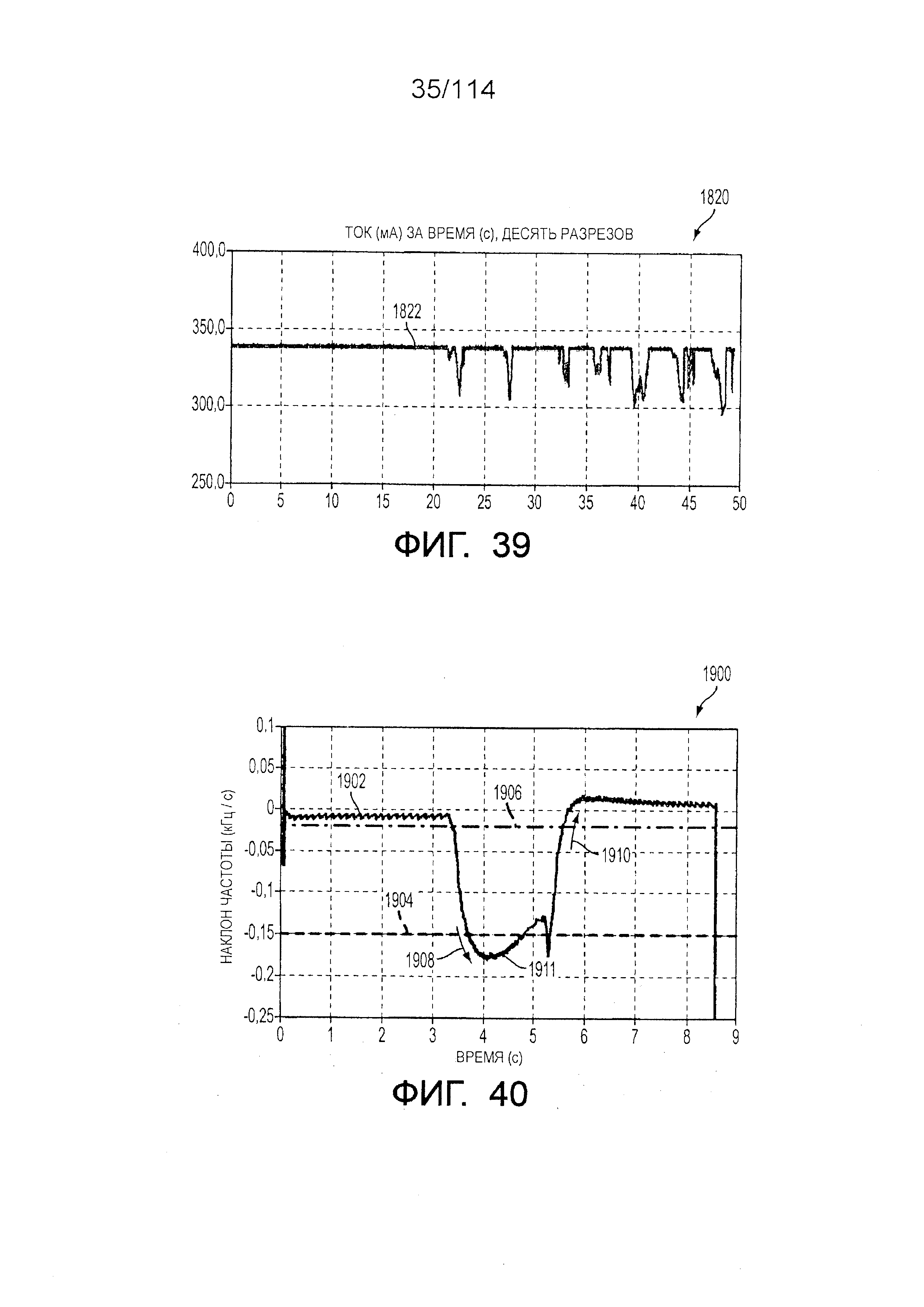
На ФИГ. 39 представлена кривая зависимости тока от времени в одном из вариантов, генератора в ходе выполнения десяти разрезов на ткани тонкой кишки.
На ФИГ. 40 представлен параметр «порог возврата наклона частоты» в привязке к кривой зависимости наклона частоты от времени в одном из вариантов, генератора.
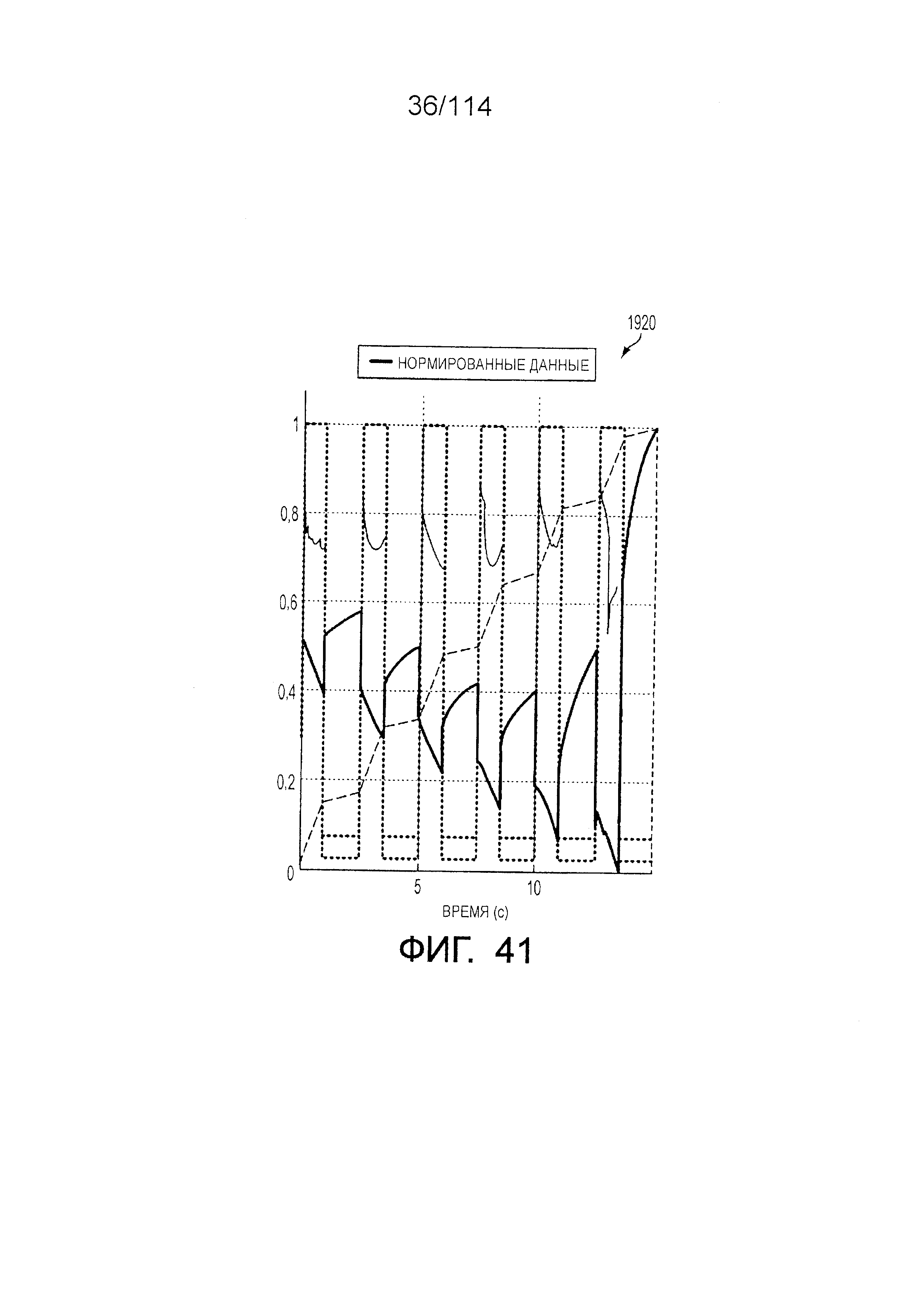
На ФИГ. 41 представлен комбинированный график работы в импульсном режиме одного из вариантов ультразвукового инструмента на фрагменте сонной артерии, показывающий кривую зависимости нормированных мощности, тока, энергии и частоты от времени.
На ФИГ. 42A представлено графическое изображение зависимости сопротивления и тока от времени в одном из вариантов, генератора при выполнении последовательных разрезов на ткани за период времени.
На ФИГ. 42B представлено графическое изображение зависимости частоты от времени в одном из вариантов, генератора при выполнении последовательных разрезов ткани за период времени.
На ФИГ. 42C представлено графическое изображение зависимости мощности, энергии и температуры от времени в одном из вариантов, генератора при выполнении последовательных разрезов ткани за период времени.
На ФИГ. 43 представлено графическое изображение кривой расчетного наклона частоты при работе в импульсном режиме, отображенной на ФИГ. 41 и ФИГ. 50A-C, в общем виде.
На ФИГ. 44 представлен укрупненный вид графического изображения кривой расчетного наклона частоты при работе в импульсном режиме, показанного на ФИГ. 43.
На ФИГ. 45 представлено графическое изображение кривых других интересующих данных - сопротивления, мощности, энергии, температуры.
На ФИГ. 46 представлено графическое изображение сводной информации по взвешенному наклону частоты в зависимости от уровня мощности для различных типов ультразвуковых инструментов.
На ФИГ. 47 представлено графическое изображение зависимости резонансной частоты, усредненной резонансной частоты и наклона частоты от времени в одном из вариантов, генератора.
На ФИГ. 48 представлен укрупненный вид кривых зависимости резонансной частоты и усредненной резонансной частоты от времени, изображенных на ФИГ. 47.
На ФИГ. 49 представлен укрупненный вид кривых зависимости резонансной частоты и тока от времени в одном из вариантов, генератора.
На ФИГ. 50 представлен комбинированный график кривых нормированных мощности, сопротивления, тока, энергии, частоты и температуры в одном из вариантов, генератора, соединенного с ультразвуковым инструментом.
На ФИГ. 51A и 51B представлены графические изображения резонансной частоты и наклона частоты соответственно, отображенные одним из вариантов ультразвукового инструмента во время выполнения разреза с помощью ультразвука.
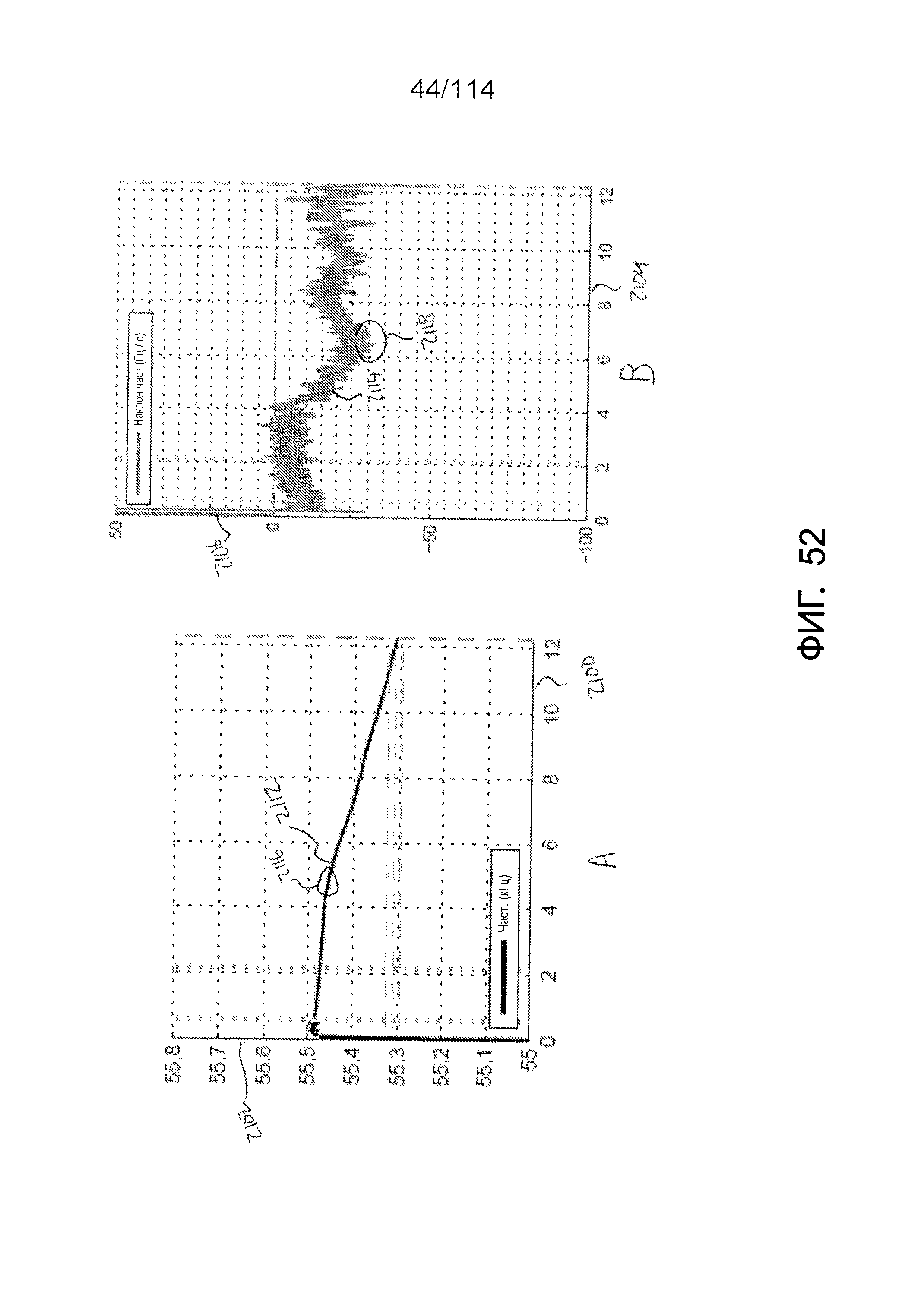
На ФИГ. 52A и 52B представлены графические изображения резонансной частоты и наклона частоты соответственно, отображенные одним из вариантов ультразвукового инструмента во время выполнения еще одного разреза с помощью ультразвука.
На ФИГ. 53 представлена логическая схема одного из вариантов алгоритма ткани, реализующего условие базовой предельной частоты, которое может быть выполнено в одном из вариантов, генератора для учета базовой резонансной частоты ультразвукового лезвия.
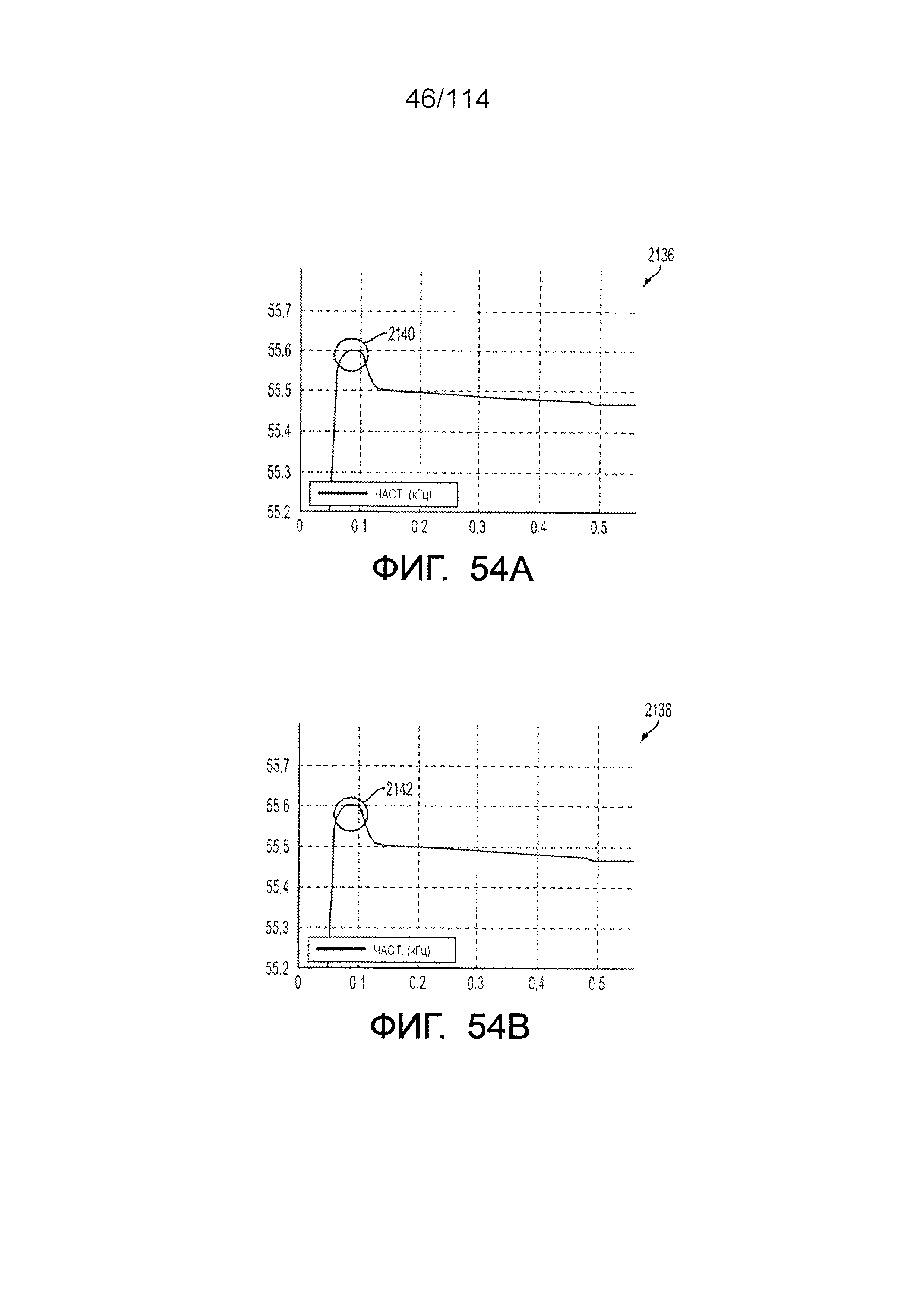
На ФИГ. 54A и 54B представлены графические изображения частоты лезвия при различных ультразвуковых запусках, описанных в примере.
На ФИГ. 55 представлено графическое изображение резонансной частоты и ультразвукового сопротивления за период времени для одного варианта при выполнении нескольких разрезов при помощи ультразвукового лезвия.
На ФИГ. 56 изображена логическая схема алгоритма ткани, которая может быть реализована в одном из вариантов, генератора и/или инструмента для выполнения условия базовой предельной частоты в совокупности с другими условиями.
На ФИГ. 57 представлена логическая схема одного из вариантов части алгоритма ткани, показанного на ФИГ. 20, отвечающая за оценку характеристик сигнала алгоритма ткани с учетом условия базовой предельной частоты.
На ФИГ. 58 представлена логическая схема одного из вариантов алгоритма мониторинга нагрузки, который может выполняться в одном из вариантов, генератора.
На ФИГ. 59 представлена логическая схема для оценки наборов условий для оценки характеристик сигнала алгоритма ткани, показанного на ФИГ. 57, который может выполняться в одном из вариантов, генератора.
На ФИГ. 60 представлена логическая схема для выполнения одного варианта логического блока нефильтрованных условий, показанного на ФИГ. 59, который может выполняться в одном из вариантов, генератора.
На ФИГ. 61 представлено графическое изображение наклона частоты и второй производной частоты по времени, иллюстрирующее пару сеансов нагрузки.
На ФИГ. 62 представлено графическое изображение наклона частоты, второй производной частоты по времени и скользящей дельты, показывающее присутствие нагрузки.
На ФИГ. 63 представлено графическое изображение еще одного варианта наклона частоты, второй производной частоты по времени и скользящей дельты, отображающее еще один случай присутствия нагрузки.
На ФИГ. 64 представлена логическая схема для выполнения одного из вариантов алгоритма, применяющего набор условий, в том числе триггер присутствия нагрузки, который может использоваться в одном из вариантов, генератора.
На ФИГ. 65 представлена логическая схема реализации одного варианта логического блока, служащего для определения, присутствует ли нагрузка на хирургический инструмент.
На ФИГ. 66 представлена логическая схема одного из вариантов части алгоритма ткани, показанного на ФИГ. 20, отвечающего за оценку характеристик сигнала алгоритма ткани, с учетом набора условий, в которых используется присутствие нагрузки для подготовки триггеров набора откликов.
На ФИГ. 67 представлена логическая схема для оценки набора условий для оценки характеристик сигнала алгоритма ткани, показанного на ФИГ. 66, который может выполняться в одном из вариантов, генератора.
На ФИГ. 68 представлена логическая схема одного из вариантов алгоритма мониторинга нагрузки, который может выполняться в одном из вариантов, генератора, как показано на ФИГ. 67.
На ФИГ. 69 представлена логическая схема одного из вариантов логического блока схемы нефильтрованного набора условий, показанного на ФИГ. 67, который может выполняться одним из вариантов генератора.
На ФИГ. 70 представлена схема, иллюстрирующая мощность или смещение для одного примера исполнения алгоритма, показанного на ФИГ. 71.
На ФИГ. 71 представлена логическая схема одного из вариантов алгоритма для запуска ультразвукового инструмента последовательно при двух уровнях мощности.
На ФИГ. 72 представлена схема, иллюстрирующая разрушающее давление, полученное хирургическим инструментом при работе в соответствии с алгоритмом на ФИГ. 71 и активированном при одном и том же уровне мощности.
На ФИГ. 73 представлена схема, иллюстрирующая время рассечения, полученное при опытах, проиллюстрированных на ФИГ. 72.
На ФИГ. 74 представлена схема, иллюстрирующая характер управляющего сигнала в соответствии с одним из вариантов алгоритма, представленного на ФИГ. 71.
На ФИГ. 75 представлена логическая схема еще одного варианта алгоритма, представленного на ФИГ. 71, использующего паузу между прекращением работы инструмента и последующей его активацией.
На ФИГ. 76 представлена схема, иллюстрирующая характер управляющего сигнала в соответствии с одним из вариантов алгоритма, представленного на ФИГ. 75.
На ФИГ. 77 представлена логическая схема еще одного варианта алгоритма, представленного на ФИГ. 71, использующего третий управляющий сигнал.
На ФИГ. 78 представлена схема, иллюстрирующая разрушающие давления в хирургическом инструменте, использующемся в соответствии с алгоритмом, представленном на ФИГ. 71, в сравнении с хирургическим инструментом, использующемся в соответствии с алгоритмом, представленном на ФИГ. 77.
На ФИГ. 79 представлена схема, иллюстрирующая разрушающие давления в хирургическом инструменте, подобном инструменту, использующемуся в соответствии с алгоритмом, представленном на ФИГ. 71, в сравнении с хирургическим инструментом, использующемся в соответствии с алгоритмом, представленном на ФИГ. 78.
На ФИГ. 80 представлена схема, иллюстрирующая время рассечения, полученное при опытах, проиллюстрированных на ФИГ. 79.
На ФИГ. 81 представлена логическая схема одного из вариантов алгоритма, реализующего период первоначального захвата.
На ФИГ. 82 представлена логическая схема еще одного варианта алгоритма, реализующего период первоначального захвата.
На ФИГ. 83 представлена схема, иллюстрирующая характер управляющего сигнала в соответствии с алгоритмом, представленным на ФИГ. 82.
На ФИГ. 84 представлена схема нейронной сети, описанной в примере.
На ФИГ. 85 представлен фрагмент графика функции активации для скрытых нейронов и/или выходного нейрона(ов) нейронной сети.
На ФИГ. 86 представлена схема, изображающая пример функции активации для скрытых нейронов и/или выходного нейрона(ов) нейронной сети.
На ФИГ. 87 представлена логическая схема одного из вариантов алгоритма для обучения нейронной сети, например, нейронной сети, представленной на ФИГ. 86, с использованием обратного распространения.
На ФИГ. 88 представлена логическая схема одного из вариантов алгоритма для обнаружения набора условий для ультразвукового инструмента с использованием модели с несколькими переменными.
На ФИГ. 89 представлена логическая схема одного из вариантов алгоритма, использующего модель с несколькими переменными, такую как, например, описанная в настоящем документе нейронная сеть.
На ФИГ. 90 представлена схема, иллюстрирующая характер управляющего сигнала одного из вариантов алгоритма, представленного на ФИГ. 89.
На ФИГ. 91 представлена схема, иллюстрирующая характер управляющего сигнала еще одного варианта выполнения алгоритма, представленного на ФИГ. 89.
На ФИГ. 92 представлена логическая схема, изображающая один из вариантов алгоритма с использованием модели с несколькими переменными для отслеживания набора условий, содержащего несколько условий.
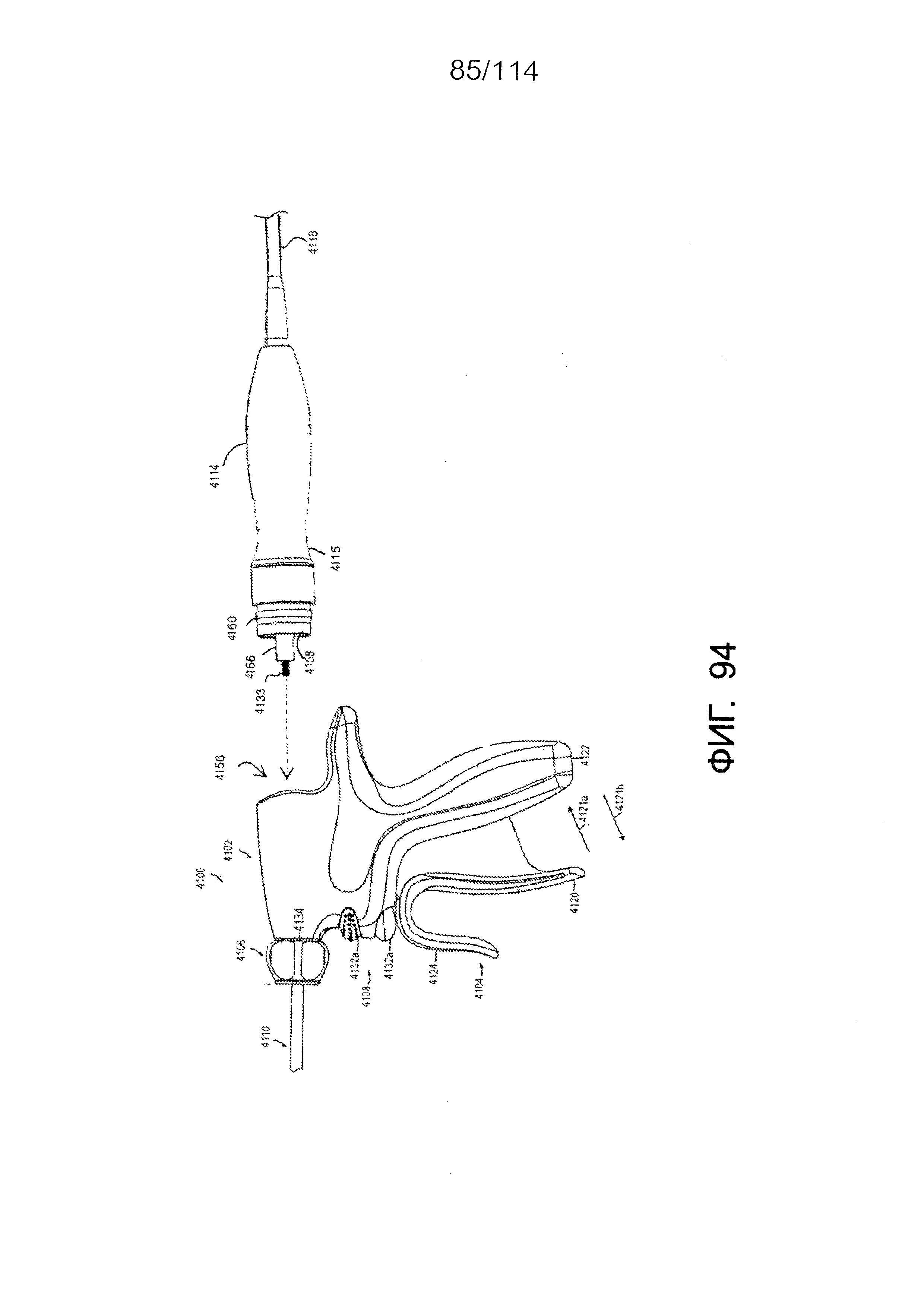
На ФИГ. 93 представлен вид сбоку одного из вариантов конфигурации ультразвукового хирургического инструмента, имеющего поворотное электрическое соединение согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 94 представлен вид сбоку конфигурации ультразвукового хирургического инструмента, представленной на ФИГ. 93, изображающий рукояточный блок и рукоятку перед вставкой рукоятки в рукояточный блок согласно различным вариантам, описанным в настоящем документе.
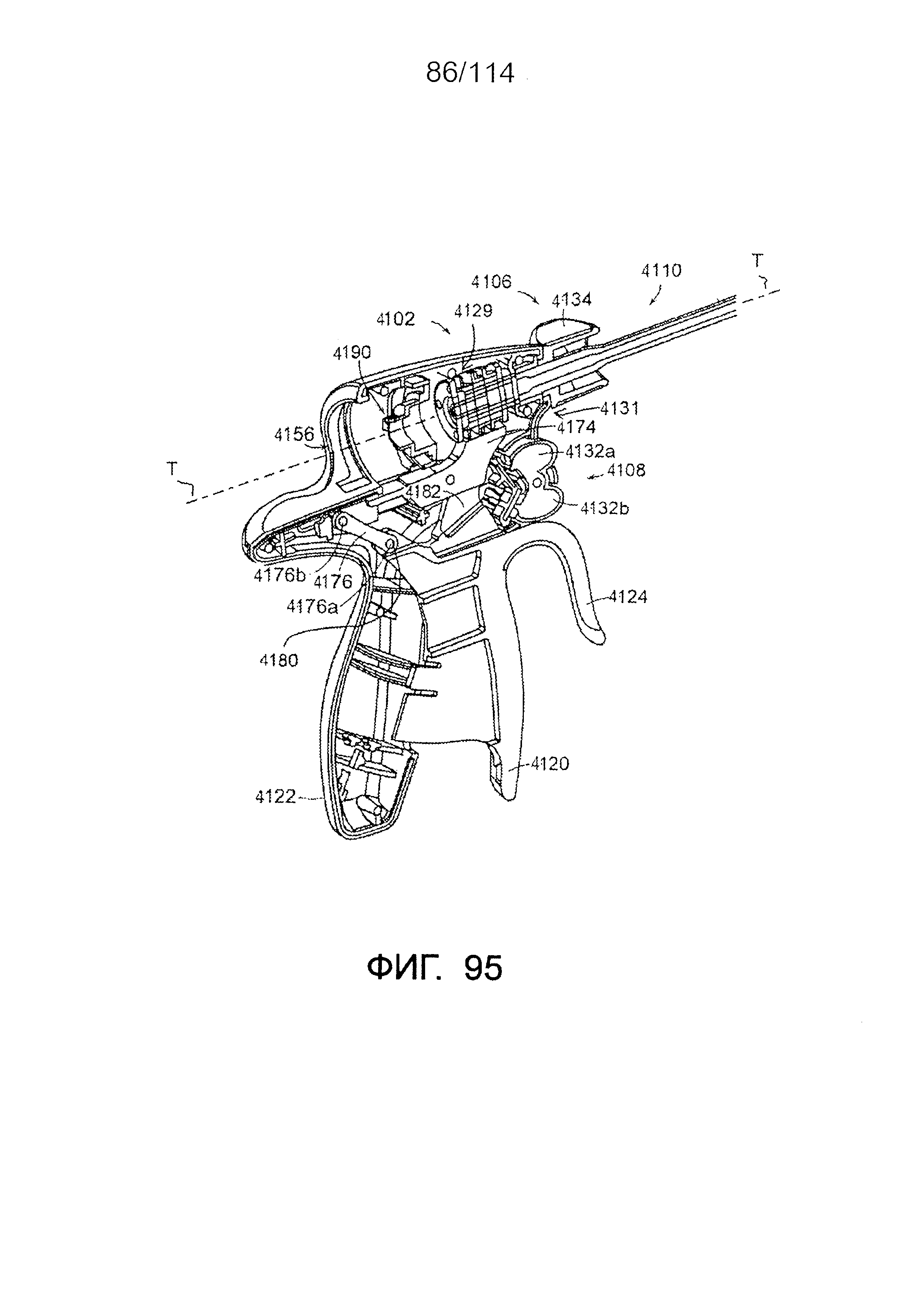
На ФИГ. 95 представлен вид в разрезе рукояточного блока ультразвукового хирургического инструмента, имеющего поворотное электрическое соединение в соответствии с различными вариантами, описанными в настоящем документе.
На ФИГ. 96 представлено перспективное изображение модуля коннектора ультразвукового хирургического инструмента, соединенного с гибкой схемой и рукояткой в соответствии с различными вариантами, описанными в настоящем документе.
На ФИГ. 97 представлено изображение модуля коннектора, представленного на ФИГ. 96, в разобранном виде в соответствии с различными вариантами, описанными в настоящем документе.
На ФИГ. 98 представлено перспективное изображение устройства внутреннего и внешнего кольца и соответствующих соединительных элементов модуля коннектора в соответствии с различными вариантами, описанными в настоящем документе.
На ФИГ. 99 представлено перспективное изображение первого кольцевого проводника и второго кольцевого проводника, расположенных в корпусе модуля коннектора в соответствии с различными вариантами, описанными в настоящем документе.
На ФИГ. 100 представлено перспективное изображение дистального конца вращающегося соединителя, который имеет внутренний и внешний проводники и соответствующие соединительные элементы, расположенные внутри утопленных частей вращающегося соединителя согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 101 представлено перспективное изображение модуля коннектора, соединенного с дистальным концом рукоятки согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 102 представлен вид спереди внутреннего и внешнего кольцевых проводников и соответствующих соединительных элементов, расположенных во вращающемся соединительном элементе согласно различным вариантам, описанным в настоящем документе.
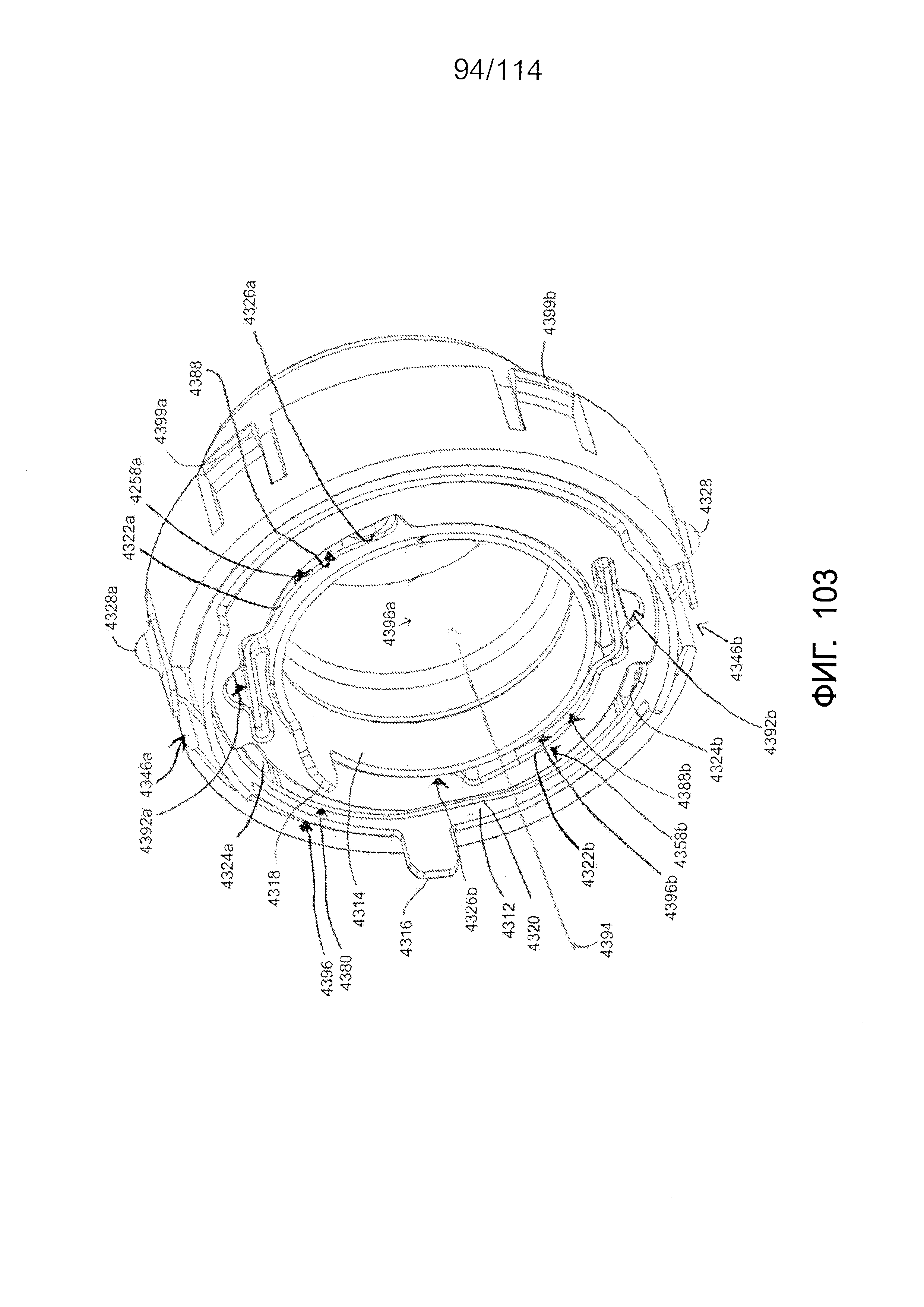
На ФИГ. 103 представлен перспективный вид задней стороны вращающегося соединительного элемента, имеющего внутренний и внешний кольцевые проводники и соответствующие соединительные элементы, расположенные в утопленных частях вращающегося соединительного элемента согласно различным формам, описанным в настоящем документе.
На ФИГ. 104 представлен вид слева ультразвукового рукояточного блока согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 105 представлен еще один вид слева ультразвукового рукояточного блока, показанного на ФИГ. 104, без левой половины корпуса рукоятки согласно различным вариантам, описанным в настоящем документе.
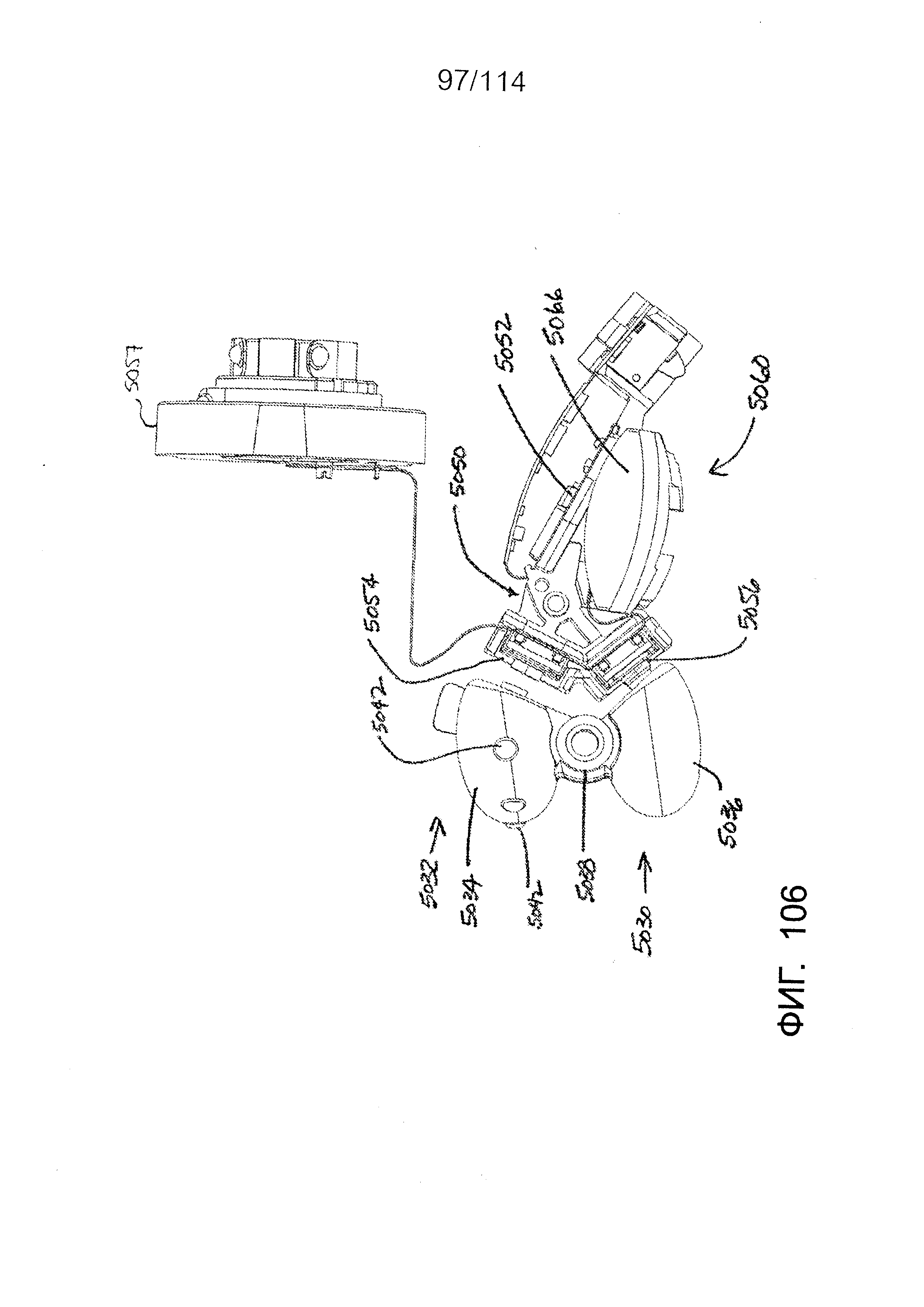
На ФИГ. 106 представлен вид сбоку механизма переключателя ультразвукового хирургического инструмента согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 107 представлен передний вид механизма переключателя, изображенного на ФИГ. 106, согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 108 представлен вид снизу механизма переключателя, изображенного на ФИГ. 106 и 107, согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 109 изображен вид сверху механизма переключателя, изображенного на ФИГ. 106-109, согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 109A изображен вид слева части еще одного ультразвукового рукояточного блока согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 110 представлен вид слева еще одного ультразвукового рукояточного блока согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 111 представлен вид справа ультразвукового рукояточного блока, изображенного на ФИГ. 110 согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 112 представлен перспективный вид части еще одного рукояточного блока согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 113 представлен перспективный вид еще одного второго устройства переключателя согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 114 представлен вид сзади второго устройства переключателя, изображенного на ФИГ. 113, согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 115 представлен вид сзади еще одного второго устройства переключателя согласно различным вариантам, описанным в настоящем документе.
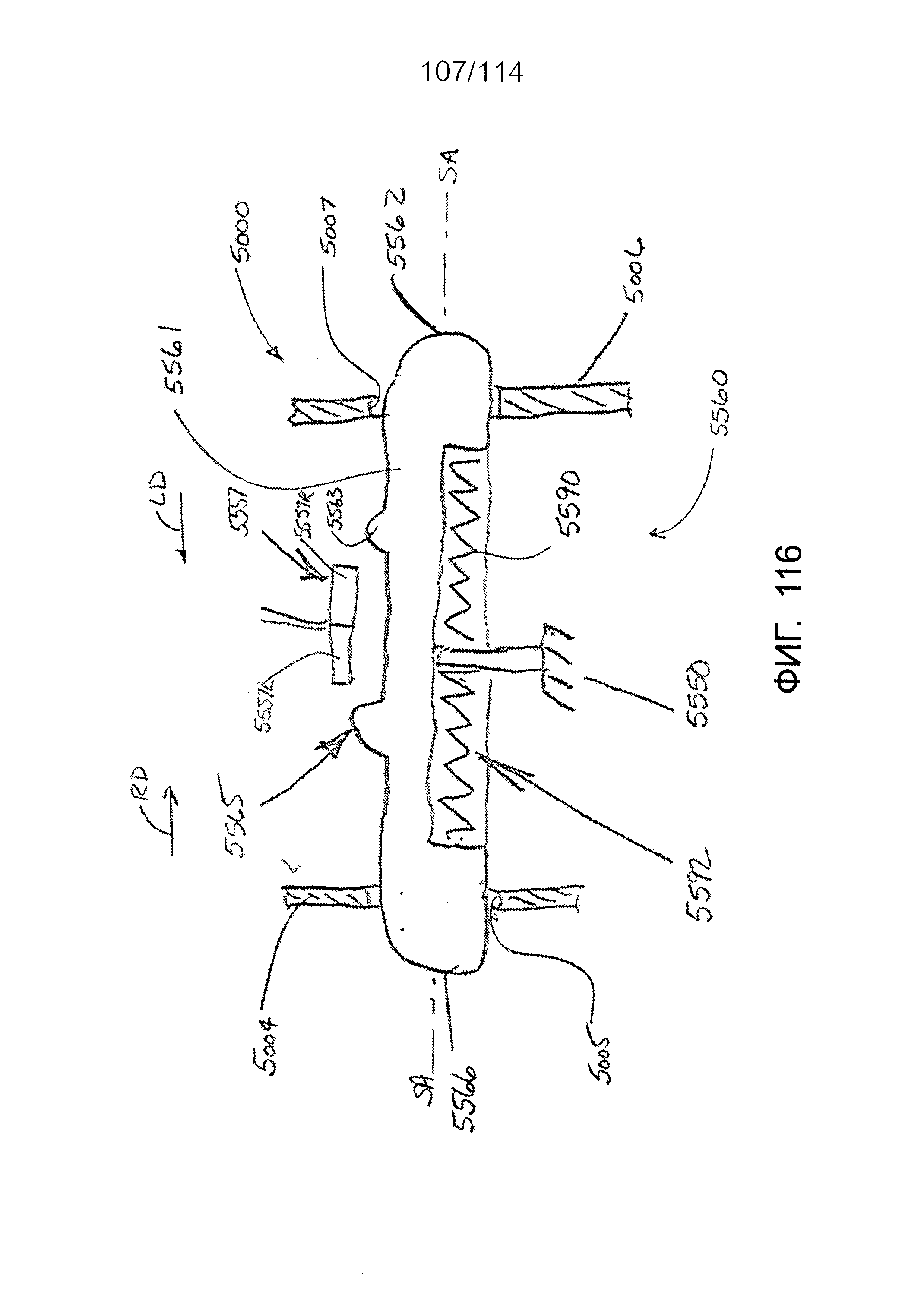
На ФИГ. 116 представлен вид сверху части второго устройства переключателя и рукояточного блока согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 117 представлено схематичное изображение механизма переключателя, который может использоваться вместе с различными ультразвуковыми рукояточными блоками согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 118 представлено еще одно схематичное изображение механизма переключателя, изображенного на ФИГ. 117, во включенном положении при активированном центральном переключателе согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 119 представлено еще одно схематичное изображение механизма переключателя, изображенного на ФИГ. 117 и 118, в другом включенном положении при активированном правом переключателе согласно различным вариантам, описанным в настоящем документе.
На ФИГ. 120 представлено еще одно схематичное изображение механизма переключателя, изображенного на ФИГ. 117-119, в другом включенном положении при активированном левом переключателе согласно различным вариантам, описанным в настоящем документе.
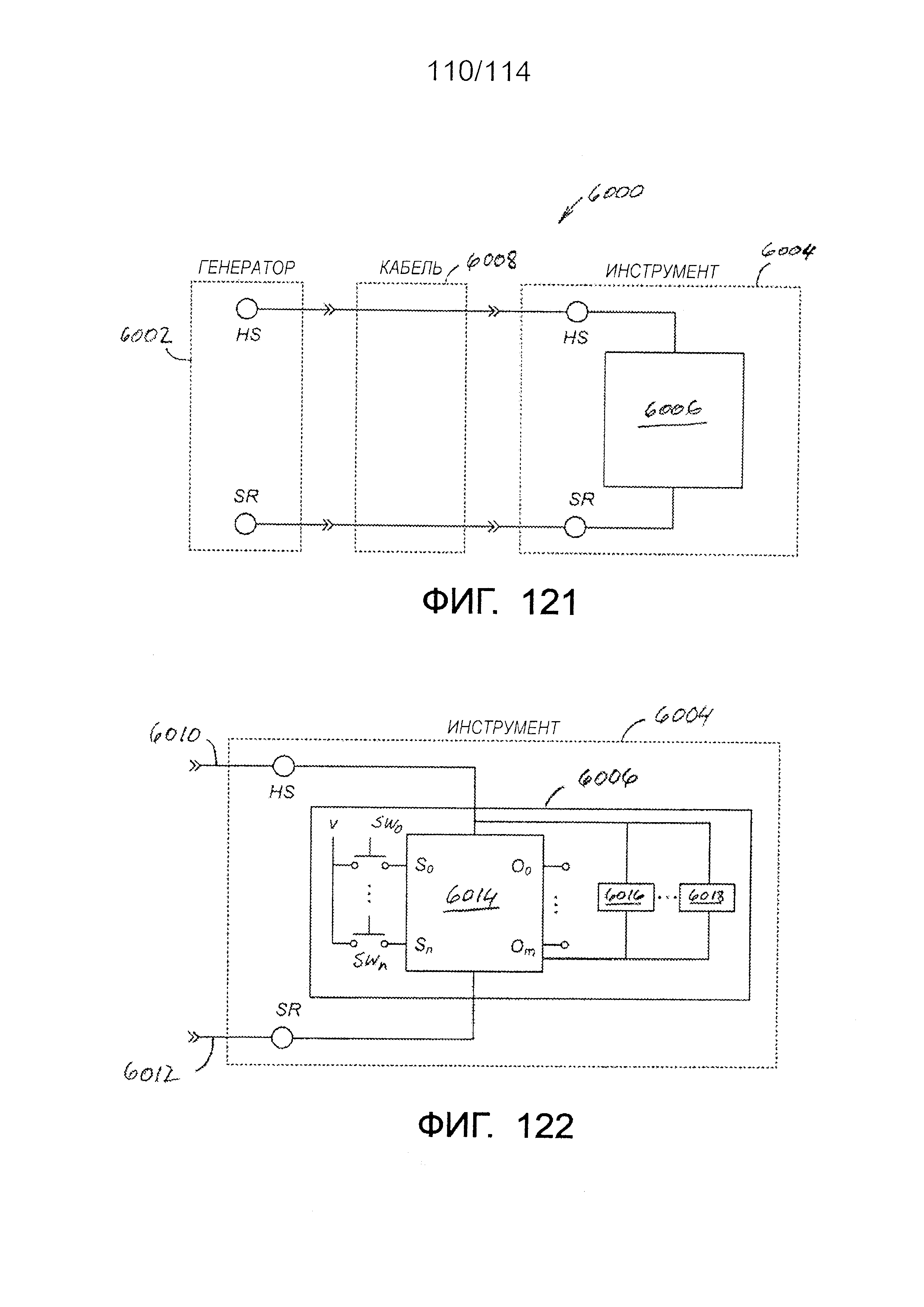
На ФИГ. 121 представлена блок-схема системы, на которой изображен генератор, соединенный с медицинским инструментом и схемой.
На ФИГ. 122 представлена блок-схема схемы инструмента.
На ФИГ. 123 представлена временная диаграмма импульсов тока в кадре передачи последовательного протокола на выходе генератора.
На ФИГ. 124 представлена временная диаграмма импульсов напряжения в кадре передачи последовательного протокола на выходе схемы.
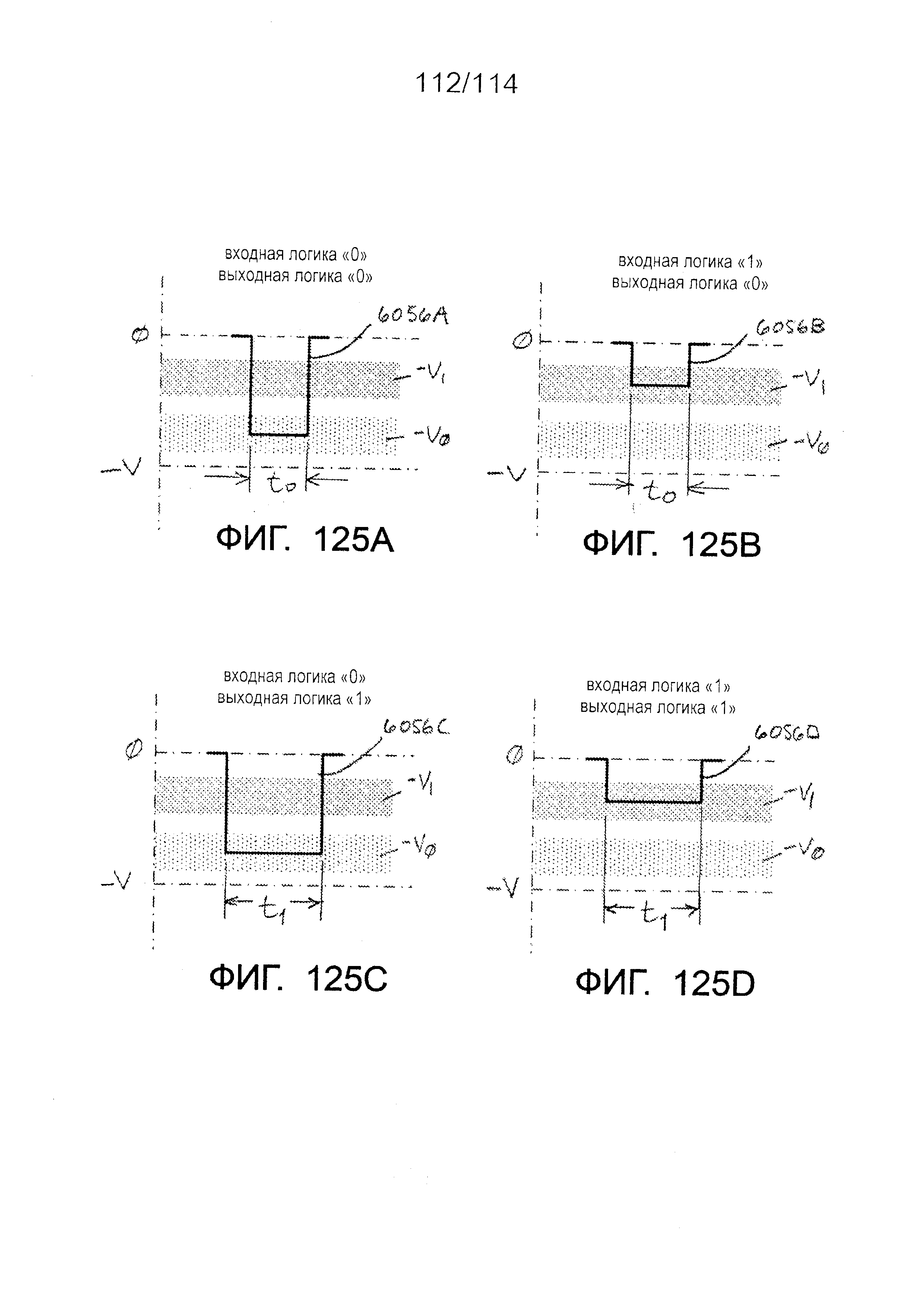
На ФИГ. 125A представлен фрагмент временной диаграммы последовательного протокола.
На ФИГ. 125B представлен фрагмент временной диаграммы последовательного протокола.
На ФИГ. 125C представлен фрагмент временной диаграммы последовательного протокола.
На ФИГ. 125D представлен фрагмент временной диаграммы последовательного протокола.
На ФИГ. 126 представлен один пример временной диаграммы последовательного протокола.
На ФИГ. 127 представлен один пример временной диаграммы последовательного протокола.
На ФИГ. 128 представлен пример временной диаграммы последовательного протокола.
Описание
Подателю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные в тот же день и включенные в настоящий документ по ссылке во всей полноте:
- Заявка на патент США под заголовком «ПРИБОРЫ И МЕТОДЫ РАЗРЕЗАНИЯ И КОАГУЛЯЦИИ ТКАНИ», номер дела патентного поверенного END7126USNP/120116;
- Заявка на патент США под заголовком «ВРАЩАЮЩЕЕСЯ ЭЛЕКТРИЧЕСКОЕ СОЕДИНЕНИЕ ДЛЯ УЛЬТРАЗВУКОВЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», номер дела патентного поверенного END7126USNP2/120116-2;
- Заявка на патент США под заголовком «ПРОТОКОЛ ПОСЛЕДОВАТЕЛЬНОЙ ПЕРЕДАЧИ ДАННЫХ ДЛЯ МЕДИЦИНСКОГО ПРИБОРА», номер дела патентного поверенного END7126USNP3/120116-3; и
- Заявка на патент США под заголовком «МЕТОДЫ РАЗРЕЗАНИЯ И КОАГУЛЯЦИИ ТКАНИ ДЛЯ УЛЬТРАЗВУКОВЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», номер дела патентного поверенного END7126USNP4/120116-4.
Перед тем как приступить к подробному описанию различных вариантов ультразвуковых хирургических инструментов, необходимо отметить, что применение или использование приведенных в примерах вариантов не ограничивается деталями конструкции и компоновкой составных частей, приведенными в сопутствующих чертежах и описании. Приведенные в примерах варианты могут внедряться или включаться в состав других вариантов, вариаций и модификаций, также могут применяться и выполняться различными способами. Кроме того, если не указано иное, термины и выражения, использующиеся в данном документе, были выбраны с целью описания приведенных в примерах вариантов изобретения для удобства читателя и не ограничивают область применения таких вариантов.
Кроме того, подразумевается, что любой один или несколько описанных ниже вариантов, интерпретаций вариантов, примеров могут комбинироваться с одним или несколькими описанными ниже вариантами, интерпретациями вариантов, примерами.
Различные варианты изобретения предназначены для использования в усовершенствованных ультразвуковых хирургических инструментах, выполненных для осуществления рассечения, разрезания ткани и/или коагуляции во время хирургических процедур. В одном из вариантов, ультразвуковой хирургический аппарат предназначен для использования в открытых хирургических процедурах, но может применяться и в других видах хирургии - таких, как лапароскопические, эндоскопические процедуры и процедуры с применением робототехники. Возможность выборочного использования ультразвуковой энергии облегчает многоцелевое применение.
Различные варианты изобретения будут описаны в сочетании с ультразвуковым инструментом, описанным в данном документе. Данное описание приводится в качестве примера, а не ограничения и не подразумевает ограничения области и методов применения изобретения. Например, любой из описанных вариантов изобретения может использоваться вместе с множеством ультразвуковых инструментов, в том числе описанных, например, в патентах США под номерами 5 938 633; 5 935 144; 5 944 737; 5 322 055; 5 630 420; и 5 449 370.
Как станет очевидно из нижеследующего описания, подразумевается, что варианты хирургических инструментов, описанных в данном документе, могут использоваться вместе с блоком осциллятора хирургической системы, где ультразвуковая энергия блока осциллятора запускает работу данного хирургического инструмента в ультразвуковом режиме. Также предполагается, что варианты хирургического инструмента, описанного в настоящем документе, могут использоваться вместе с блоком генератора сигнала хирургической системы, в котором электрическая энергия в форме радиочастот (РЧ), например, используется для обеспечения пользователя обратной связью с хирургическим инструментом. Ультразвуковой осциллятор и/или блок генератора сигнала могут быть либо неразъемно соединены с хирургическим инструментом, либо выступать отдельными компонентами, которые электрически соединяются с хирургическим инструментом.
Конфигурация одного из вариантов данного хирургического аппарата предполагает его одноразовое использование в силу его простейшей конструкции. Однако в то же время подразумевается, что другие варианты данного хирургического инструмента могут быть предназначены для многократного использования. Информация о разъемном соединении данного хирургического инструмента с ассоциированным осциллятором и блоком генератора сигнала публикуется в данном документе для использования в отношении одного пациента исключительно в качестве примера. Однако подразумевается и неразъемное соединение данного хирургического инструмента с осциллятором и/или блоком генератора сигнала в единое целое. Таким образом, различные варианты описанных в настоящем документе хирургических инструментов могут быть выполнены без ограничений для однократного и/или многократного использования как со съемным, так и с неразъемным встроенным осциллятором и/или блоком генератора сигнала, при этом подразумевается, что все комбинации таких конфигураций являются предметом данных сообщаемых сведений.
На ФИГ. 1-3 изображен один вариант хирургической системы 19, в состав которой входит ультразвуковой хирургический инструмент 100. Хирургическая система 19 состоит из ультразвукового генератора 30, соединенного с ультразвуковым датчиком 50 посредством подходящего канала передачи, такого как кабель 22, и ультразвукового хирургического инструмента 100. Несмотря на то, что в описываемом варианте генератор 30 изображен отдельно от хирургического инструмента 100, в одном из вариантов, генератор 30 может составлять единое целое с хирургическим инструментом 100, образуя единую хирургическую систему 19. Генератор 30 включает в себя устройство ввода 406, расположенное на передней панели консоли генератора 30. Устройство ввода 406 может включать в себя любое подходящее устройство, которое генерирует сигналы, подходящие для программирования работы генератора 30 в соответствии с приведенным ниже описанием к ФИГ. 9. Также касательно ФИГ. 1-3, кабель 22 может иметь несколько электрических проводников для подачи электрической энергии на положительный (+) и отрицательный (-) электроды ультразвукового датчика 50. Отметим, что в некоторых моделях ультразвуковой датчик 50 может называться «рукояткой» или «рукояточным блоком», поскольку хирургический инструмент 100 хирургической системы 19 может быть выполнен таким образом, чтобы хирург мог помещать ультразвуковой датчик 50 в руку и манипулировать им во время различных процедур и операций. Подходящий генератор 30 - генератор GEN 300 производства компании Ethicon Endo-Surgery, Inc. (Цинциннати, штат Огайо), в соответствии с информацией, приведенной в одном или нескольких их следующих патентов США, каждый из которых является частью этого документа по ссылке: Патент США №6 480 796 (Метод улучшения запуска ультразвуковой системы в условиях нулевой нагрузки); Патент США №6 537 291 (Метод обнаружения непрочного крепления лезвия в рукоятке, соединенной с ультразвуковой хирургической системой); Патент США №6 626 926 (Метод приведения в действие ультразвуковой системы в целях улучшения приема резонансной частоты лезвия при запуске); Патент США №6 633 234 (Метод выявления поломки лезвия с использованием данных о производительности и/или сопротивлении); Патент США №6 662 127 (Метод обнаружения наличия лезвия в ультразвуковой системе); Патент США № 6 678 621 (Управление расходом энергии с использованием запаса регулировки по фазе в ультразвуковой хирургической рукоятке); Патент США №6 679 899 (Метод выявления поперечных вибраций в ультразвуковой рукоятке); Патент США №6 908 472 (Устройство и метод, служащие для изменения функций генератора в ультразвуковой хирургической системе); Патент США №6 977 495 (Электронные схемы обнаружения для системы хирургической рукоятки); Патент США № 7 077 853 (Метод расчета емкости датчика для определения температуры датчика); Патент США № 7 179 271 (Метод приведения в действия ультразвуковой системы в целях улучшения приема резонансной частоты лезвия при запуске); Патент США № 7 273 483 (Устройство и метод приведения в готовность функции генератора в ультразвуковой хирургической системе).
В соответствии с описанными вариантами, ультразвуковой генератор 30 производит электрический сигнал или управляющий сигнал определенного напряжения, тока и частоты, например, 55,500 циклов в секунду (Гц). Генератор 30 соединен посредством кабеля 22 с рукояточным блоком 68, который содержит пьезокерамические элементы, формирующие ультразвуковой датчик 50. При активации переключателя 312a на рукояточном блоке 68 или ножном переключателе 434, соединенном с генератором 30 при помощи другого кабеля, сигнал генератора поступает на датчик 50, который вызывает продольную вибрацию его элементов. Преобразователь 50 прикреплен к рукояточному блоку 68 посредством коннектора 300. После установки, датчик 50 акустически соединяется с хирургическим лезвием 79 посредством конструктивного элемента или волновода 80 (ФИГ. 2) В конструктивном элементе 80 и лезвии 79 последовательно вызывается вибрация на ультразвуковых частотах, когда управляющий сигнал передается на датчик 50. Конструктивный элемент 80 сконструирован с возможностью резонанса на выбранной частоте, что усиливает движение, вызываемое датчиком 50. В одном из вариантов, генератор 30 выполнен с возможностью генерирования определенного выходного сигнала напряжения, тока и/или частоты, который может меняться ступенчато с высокой степенью разрешения, точности и повторяемости.
Касательно ФИГ. 4: в современных системах обычный осциллятор активируется в момент времени 0, вырабатывая в результате ток 300, достигающий желаемого заданного значения, равного приблизительно 340мА. Примерно через 2 секунды дается малая нагрузка, что приводит к соответствующему увеличению напряжения 310, мощности 320, сопротивления 330 и изменениям в резонансной частоте 340.
Касательно ФИГ. 5: в современных системах обычный осциллятор активируется в момент времени 0, вырабатывая в результате ток 300, достигающий желаемого заданного значения, равного приблизительно 340мА. Примерно через 2 секунды дается увеличивающаяся нагрузка, что приводит к соответствующему увеличению напряжения 310, мощности 320, сопротивления 330 и изменениям в резонансной частоте 340. Примерно через 7 секунд нагрузка увеличивается до значения, при котором осциллятор входит в режим постоянной мощности, при котором дальнейшее увеличение нагрузки поддерживает мощность на уровне 35 Вт, пока осциллятор остается в диапазоне напряжения источника питания. Ток 300 и, соответственно, расход варьируются во время режима постоянной мощности. Приблизительно через 11,5 секунд нагрузка уменьшается до значения, при котором ток 300 возвращается в желаемое заданное значение, равное приблизительно 340мА. Напряжение 310, мощность 320, сопротивление 330 и резонансная частота 340 изменяются в зависимости от нагрузки.
Возвращаясь к ФИГ. 1-3: рукояточный блок 68 может быть многокомпонентным механизмом, сконструированным таким образом, чтобы изолировать оператора от вибраций акустического механизма, находящегося внутри ультразвукового датчика 50. Рукояточный блок 68 может иметь такую форму, при которой пользователю удобно помещать его в руку обычным образом, однако подразумевается, что манипуляции данным хирургическим инструментом 100 будут осуществляться при помощи механизма, устроенного по принципу спускового крючка, расположенного на рукояточном блоке инструмента, что будет описано ниже. Несмотря на то, что на иллюстрации представлен многокомпонентный рукояточный блок 68, рукояточный блок 68 может представлять собой один или единый компонент. Проксимальный конец ультразвукового хирургического инструмента 100 совмещается с дистальным концом ультразвукового датчика 50 путем вставки датчика 50 в рукояточный блок 68. В одном из вариантов, ультразвуковой хирургический инструмент 100 может присоединяться и отсоединяться от ультразвукового датчика 50 как отдельный блок. В других вариантах, ультразвуковой хирургический инструмент 100 и ультразвуковой датчик 50 могут выступать единым блоком. Ультразвуковой хирургический инструмент 100 может включать в себя рукояточный блок 68, в состав которого входит сопряженная часть корпуса 69, часть корпуса 70 и передающий блок 71. Если данный инструмент предназначен для использования в эндоскопии, конструкция может иметь такие размеры, что внешний диаметр передающего блока 71 составляет приблизительно 5,5 мм. Удлиненный передающий блок 71 ультразвукового хирургического инструмента 100 выходит из рукояточного блока 68 и поперечен ему. Передающий блок 71 может поворачиваться в желаемое положение относительно рукояточного блока 68 при помощи переключателя 29, см. описание ниже. Рукояточный блок 68 может быть выполнен из износоустойчивого пластика, например, поликарбоната или жидкокристаллического полимера. Также подразумевается, что рукояточный блок 68 может быть изготовлен из различных других материалов, в том числе других пластмасс, керамики или металлов.
Передающий блок 71 может включать внешний трубчатый элемент или внешнюю защитную трубу 72, внутреннюю трубчатую деталь привода 76, волновод 80 и концевой зажим 81, состоящий, например, из лезвия 79, зажимного рычага 56 и одной или более зажимных пластин 58. Преобразователь 50 и передающий блок 71 (включая или не включая концевой зажим 81) могут называться ультразвуковой системой привода. Как описано ниже, внешняя защитная труба 72, элемент привода 76 и волновод 80 или передающий вал могут быть совмещены для вращения в виде единого блока (вместе с ультразвуковым датчиком 50) относительно рукояточного блока 68. Волновод 80, предназначенный для передачи ультразвуковой энергии от ультразвукового датчика 50 лезвию 79, может быть гибким, полугибким и жестким. Волновод 80 может быть также выполнен с возможностью усиления механических вибраций, передаваемых посредством волновода 80 на лезвие 79, о чем широко известно в этой области техники. Волновод 80 может также обладать возможностями для контроля коэффициента усиления продольной вибрации в волноводе 80 и возможностями настройки волновода 80 на резонансную частоту системы. В частности, волновод 80 может иметь любой подходящий поперечный размер. Например, волновод 80 может иметь практически одинаковую ширину или же состоять из конусовидных секций или иметь форму конуса по всей длине. В одной из разновидностей данного варианта, диаметр волновода составляет примерно 0,338 см (0,113 дюймов), подходящий для минимизации уровня отклонения лезвия 79 в целях уменьшения зазора в проксимальной части концевого зажима 81.
Лезвие 79 может быть совмещено с волноводом 80 и составлять с ним единый блок. В альтернативной разновидности данного варианта, лезвие 79 может крепиться посредством резьбового соединения, сварного соединения или других способов соединения. Дистальный конец лезвия 79 расположен возле точки максимальной вибрации с целью настройки акустического блока на предпочитаемую резонансную частоту fo, когда в акустическом блоке отсутствует ткань. Когда ультразвуковой датчик 50 получает питание, дистальный конец лезвия 79 движется в продольном направлении в диапазоне, например, приблизительно 10-500 микрон полной амплитуды и предпочтительно в диапазоне примерно 20-200 микрон на заданной частоте вибраций fo, например, 55,500 Гц.
На ФИГ. 1-3 изображен один из вариантов зажимного элемента 60, предназначенного для использования с данным ультразвуковым хирургическим инструментом 100 и совместной работы с лезвием 79. Зажимной элемент 60 вместе с лезвием 79 обычно называется концевым зажимом 81, зажимной элемент 60 также обычно называют браншей. Зажимной элемент 60 включает в себя поворотно движущийся зажимной рычаг 56, соединенный с дистальным концом внешней защитной трубы 72 и элементом привода 76, вместе с пластиной для захвата ткани или зажимной пластиной 58. Рычаг зажима 56 приводится в поворотное движение посредством пускового механизма 34, а концевой зажим 81 приводится во вращательное движение при помощи ручки 29. Например, пусковой механизм 34 может перемещаться рукой врача в проксимальном направлении. Например, ручка 34 может поворачиваться вокруг оси 36. Проксимальное движение или поворот спускового крючка 34 может вызвать дистальное движение вилки 301, механически соединенной с трубчатым элементом привода 76. Дистальное движение трубчатого элемента привода может вызвать поворотное движение зажимного рычага 56 и его смыкание с лезвием 79. Дополнительная информация о механизмах закрытия ультразвуковых хирургических инструментов приводится в данном документе ниже в комментариях к ФИГ. 93-95 и заявках на патент США под номерами 12/503 769, 12/503 770 и 12/503 и 766, каждая из которых является частью настоящего документа по ссылке во всей полноте.
В одной из разновидностей данного варианта, зажимная пластина 58 выполнена из материала TEFLON®, торговая марка компании E. I. Du Pont de Nemours and Company, полимерного материала с низким коэффициентом трения, или любого другого подходящего материала с низким коэффициентом трения. Зажимная пластина 58 устанавливается на зажимной рычаг 56 для координации работы с лезвием 79, при этом поворотным движением зажимного рычага 56 зажимная пластина 58 устанавливается в положение, при котором она располагается параллельно лезвию 79 и находится с ним в контакте, определяя таким образом область ткани, на которую будет производиться воздействие. Таким образом, ткань захватывается между зажимной пластиной 58 и лезвием 79. Как показано на иллюстрации, зажимная пластина 58 может иметь шероховатую поверхность, например, в виде зубчиков, что способствует лучшему захвату ткани вместе с лезвием 79. Зубчики обеспечивают сцепление с движущимся лезвием 79. Благодаря зубчикам также обеспечивается обратное сцепление с лезвием 79 и захватывающее движение. Специалисты в этой области техники будут понимать, что конфигурация в виде зубчиков - лишь один из примеров поверхности для захвата ткани, которая способствует предотвращению движения ткани относительно движения лезвия 79. Примеры других поверхностей - бугорки, рисунок в виде крестиков, протекторный рисунок, ячейки, поверхность, подвергшаяся пескоструйной обработке.
В силу синусоидальной траектории движения, наибольшее смещение или амплитуда движения приходится на самую удаленную часть лезвия 79, в то время как ближайший участок ткани, на которую оказывается воздействие, расположен примерно посередине амплитуды отклонения дистального конца. Во время операции, ткань на проксимальном участке концевого зажима 81 обезвоживается и утончается, а дистальный участок концевого зажима 81 рассекает ткань в дистальной области, таким образом позволяя обезвоженной и утонченной ткани в проксимальной области переместиться в более активный отрезок концевого зажима 81 для окончания рассечения ткани.
На ФИГ. 3 изображена силовая схема и отношение силы запуска FA (произведенной элементом привода 76) и силы рассечения FT (измеряемой в срединной точке оптимальной области ткани, на которую производится воздействие).
FT=FA (X2/X1) (1),
где FA равна натягу проксимальной пружины 94 (за вычетом потерь на трение), что в одном из вариантов составляет около 5,67 кг (12,5 фунта), а FT равна примерно 2,04 кг (4,5 фунта).
FT измеряется в области соприкасающихся поверхностей зажимного рычага и лезвия, где происходит оптимальное воздействие, как показано метками ткани 61a и 61b. Метки 61a, b вытравливаются или наносятся на зажимном рычаге 56 для обеспечения видимой метки, чтобы хирург имел четкое обозначение оптимальной области ткани, на которую производится воздействие. Метки 61a, b находятся на расстоянии около 7 мм друг от друга, однако более предпочтительное расстояние между ними составляет около 5 мм.
На ФИГ. 9 изображен один из вариантов системы привода 32 генератора 30, который создает ультразвуковой электрический сигнал для запуска ультразвукового датчика, также называемый управляющим сигналом. Система привода 32 гибкая и может производить ультразвуковой электрический управляющий сигнал 416 на желаемой частоте и при желаемом уровне мощности для запуска ультразвукового датчика 50. В различных вариантах, генератор 30 может состоять из нескольких отдельных функциональных элементов, таких как модули и/или блоки. Несмотря на то, что в примере могут быть описаны конкретные модули и/или блоки, следует понимать, что может использоваться большее или меньшее число модулей и/или блоков, которые также подпадают под содержание данных вариантов. Кроме того, несмотря на то, что в целях упрощения описания, различные варианты могут быть описаны в разрезе модулей и/или блоков, такие модули и или блоки могут быть реализованы в виде одного или более компонентов аппаратного обеспечения, например, процессоров, цифровых сигнальных процессоров (ЦСП), программируемых логических устройств (ПЛУ), специализированных интегральных микросхем (СИМ), схем, регистрирующих устройств и/или программных компонентов, например, программ, подпрограмм, логических схем и/или комбинаций аппаратных и программных компонентов.
В одном из вариантов, система привода 32 генератора 30 может включать в себя одну или более встроенных программ, реализованных в виде программ ПЗУ, ПО, аппаратных средств или их любой комбинации. Система привода 32 генератора 30 может включать в себя различные исполняемые модули, такие как ПО, программы, данные, драйвера, интерфейсы прикладных программ (ИПП) и т.д. Программы ПЗУ могут храниться в энергонезависимой памяти (ЭП), например, в побитово маскированной постоянной памяти (ROM) или флеш-памяти. В различных вариантах, исполнения, хранение программ ПЗУ в постоянной памяти ROM может сохранить флеш-память. ЭП может включать в себя другие типы памяти, в том числе, например, программируемую постоянную память ROM (PROM), стираемую программируемую постоянную память ROM (EPROM), электронно-перепрограммируемую постоянную память ROM (EEPROM) или оперативную память с резервным аккумуляторным питанием (RAM), например, динамическую оперативную память (DRAM), динамическую оперативную память с удвоенной скоростью передачи данных (DDRAM) и/или синхронную оперативную память DRAM (SDRAM).
В одном из вариантов, система привода 32 генератора 30 включает в себя аппаратный компонент, реализованный в виде процессора 400, служащего для выполнения программных инструкций для мониторинга различных измеряемых характеристик ультразвукового хирургического инструмента 100 (ФИГ. 1) и генерирования выходного сигнала ступенчатой функции для приведения в действие ультразвукового датчика 50 в рабочих режимах разрезания и/или коагуляции. Специалисты в этой области поймут, что генератор 30 и система привода 32 могут включать в себя дополнительные компоненты или включать в себя их меньшее количество, и что в целях краткости и ясности в настоящем документе описана только упрощенная версия генератора 30 и системы привода 32. В различных вариантах, как обсуждалось ранее, аппаратные компоненты могут быть реализованы в виде ЦСП, ПЛУ, СИМ, схем и/или регистрирующих устройств. В одном из вариантов, процессор 400 может выполнять такие функции как хранение и выполнение инструкций компьютерных программ для генерирования выходных сигналов ступенчатой функции, служащих для приведения в действие различных компонентов ультразвукового хирургического инструмента 100, например, датчика 50, концевого зажима 81 и/или лезвия 79.
В одном из вариантов, процессор 400 под управлением одной или более подпрограмм выполняет алгоритмы в соответствии с описанными вариантами для генерирования ступенчатой функции, производимой ступенчатой кривой управляющих сигналов, в том числе тока (I), напряжения (V) и/или частоты (f) для различных временных интервалов или периодов (T). Ступенчатые кривые управляющих сигналов могут генерироваться путем формирования кусочно-линейной комбинации постоянных функций за множество временных интервалов, которые создаются путем ступенчатого изменения управляющих сигналов генератора 30 например, выходного управляющего тока (I), напряжения (V) и/или частоты (f). Временные интервалы или периоды (T) могут быть как заданными (например, зафиксированными и/или запрограммированными пользователем), так и переменными. Переменные временные интервалы могут быть определены путем установки управляющего сигнала на первом значении и поддержания этой величины управляющего сигнала до момента обнаружения изменения в наблюдаемой характеристике. Примеры наблюдаемых характеристик включают в себя, например, сопротивление датчика, сопротивление ткани, нагрев ткани, рассечение ткани, коагуляцию ткани и тому подобные. Ультразвуковые управляющие сигналы, генерируемые генератором 30, включают в себя, помимо прочего, ультразвуковые управляющие сигналы, способные возбуждать ультразвуковой датчик 50 в различных вибрационных режимах, например, первичной продольной моде и ее гармонических колебаниях, а также в искривленном и крутильном вибрационных режимах.
В одном из вариантов, исполнимые модули включают в себя один или более хранящихся в памяти алгоритмов ступенчатой функции 402, при выполнении которых процессор 400 генерирует ступенчатую функцию, сформированную ступенчатой кривой управляющих сигналов, в том числе тока (I), напряжения (V) и/или частоты (f) за разные временные интервалы или периоды (T). Ступенчатые кривые управляющих сигналов могут генерироваться путем формирования кусочно-линейных комбинаций постоянных функций за два или более временных интервала, создаваемых путем ступенчатого изменения выходного управляющего тока (I), напряжения (V) и/или частоты (f) генератора 30. Управляющие сигналы могут генерироваться за заданные фиксированные временные интервалы или периоды (T) или переменные временные интервалы или периоды, в соответствии с одним или более ступенчатых выходных алгоритмов 402. Под управлением процессора 400, генератор 30 ступенчато изменяет (например, увеличивает или уменьшает) ток (I), напряжение (V) и/или частоту (f) с определенном разрешением в течение заданного периода (T) или до тех пор, пока не выполнится заданное условие, например, изменение наблюдаемой характеристики (например, сопротивление датчика или сопротивление ткани). Ступени могут изменяться в соответствии с запрограммированными интервалами увеличения или угасания. Если необходимы иные ступени, генератор 30 может адаптивно увеличить или уменьшить шаг в зависимости от измеряемых системных характеристик.
Во время работы пользователь может программировать работу генератора 30, используя устройство ввода 406, расположенное на передней панели консоли генератора 30. Устройство ввода 406 может включать в себя любой подходящий прибор, который генерирует сигналы 408, которые могут использоваться процессором 400 для управления работой генератора 30. В различных вариантах, устройство ввода 406 включает в себя кнопки, переключатели, дисковые регуляторы, клавиатуру, вспомогательную клавиатуру, сенсорный экран, позиционирующее устройство, удаленное соединение с общим или выделенным компьютером. В других вариантах, устройство ввода 406 может включать в себя подходящий пользовательский интерфейс. Таким образом, посредством устройства ввода 406 пользователь может задавать или программировать ток (I), напряжение (V), частоту (f) и/или период (T) для программирования выходного сигнала ступенчатой функции генератора 30. Процессор 400 затем отображает выбранный уровень мощности путем отправки сигнала на линию 410 на выходной индикатор 412.
В различных вариантах, выходной индикатор 412 может предоставлять хирургу визуальную, звуковую и/или тактильную обратную связь для индикации статуса хирургической процедуры, например, когда процесс разрезания и коагуляции ткани закончен, в зависимости от измеряемой характеристики ультразвукового хирургического инструмента 100, например, сопротивления датчика, сопротивления ткани или других измеряемых величин, см. описание ниже. В качестве примера, в числе прочих, можно привести визуальную обратную связь, которая включает в себя любой вид устройства визуальной индикации, в том числе лампы накаливания или светоизлучающие диоды (LED), графический пользовательский интерфейс, дисплей, аналоговый индикатор, цифровой индикатор, гистограммный дисплей, цифровой буквенно-числовой дисплей. В качестве примера, в числе прочих, можно привести звуковую обратную связь, которая включает в себя любой тип зуммера, электронный тоновый сигнал, машинную речь, голосовой пользовательский интерфейс (VUI), служащий для взаимодействия с компьютерами посредством звуковой/речевой платформы. В качестве примера, в числе прочих, можно привести тактильную обратную связь, которая включает в себя любой вид вибраций, передаваемых через рукояточный блок инструмента 68.
В одном из вариантов, процессор 400 может быть выполнен или запрограммирован таким образом, чтобы генерировать токовый сигнал 414 и цифровой частотный сигнал 418. Данные сигналы 414, 418 отправляются на схему 420 цифрового генератора прямого синтеза (ЦГПС) для выравнивания амплитуды и частоты (f) выходного сигнала тока 416 с датчиком 50. Выходной сигнал схемы 420 ЦГПС подается на усилитель 422, выходной сигнал которого передается на трансформатор 424. Выходной сигнал трансформатора 424 - это сигнал 416, подаваемый на ультразвуковой датчик 50, соединенный с лезвием 79 посредством волновода 80 (ФИГ. 2)
В одном из вариантов, генератор 30 включает в себя один или более модулей или компонентов измерений, которые могут быть выполнены с возможностью отслеживания измеряемых характеристик ультразвукового инструмента 100 (ФИГ. 1). В проиллюстрированном варианте, процессор 400 может использоваться для отслеживания и расчета системных характеристик. Как показано, процессор 400 измеряет сопротивление Z датчика 50 путем отслеживания тока, подаваемого на датчик 50, и сопротивления, подаваемого на датчик 50. В одном из вариантов, схема чувствительности по току 426 используется для обнаружения тока, идущего через датчик 50, а схема чувствительности по напряжению 428 используется для обнаружения напряжения, подаваемого на датчик 50. Данные сигналы могут применяться в конвертере аналогового сигнала в цифровой (КАСЦ) 432 с помощью схемы аналогового мультиплексора 430 или переключения компоновки схемы. Аналоговый мультиплексор 430 направляет необходимый аналоговый сигнал на КАСЦ 432 для преобразования. В других вариантах, вместо схемы мультиплексора 430 могут использоваться несколько КАСЦ 432 для каждой измеряемой характеристики. Процессор 400 получает выходной цифровой сигнал 433 КАСЦ 432 и рассчитывает сопротивление датчика Z на основе измеренных величин тока и напряжения. Процессор 400 подстраивает выходной управляющий сигнал 416 таким образом, чтобы он мог генерировать желаемую мощность в зависимости от кривой нагрузки. В соответствии с запрограммированными алгоритмами ступенчатой функции 402, в ответ на сопротивление датчика Z процессор 400 может ступенчато изменять управляющий сигнал 416, например, ток или частоту, с любым подходящим шагом увеличения или уменьшения.
Чтобы вызвать вибрацию хирургического лезвия 79, например, привести в движение лезвие 79, пользователь активирует ножной переключатель 434 (ФИГ. 1) или переключатель 312a (ФИГ. 1) на рукояточном блоке 68. Данная активация подает управляющий сигнал 416 на датчик 50 в зависимости от запрограммированных значений тока (I), частоты (f) и соответствующих временных периодов (T). По истечении заданного фиксированного временного периода (T) или переменного временного периода, в зависимости от измеряемой системной характеристики, например, изменения сопротивления Z датчика 50, процессор 400 изменяет шаг выходного тока или шаг частоты в соответствии с запрограммированными величинами. Выходной индикатор 412 сообщает о конкретном состоянии процесса пользователю.
Программируемую работу генератора 30 можно проиллюстрировать дальше с помощью ФИГ. 6, 7 и 8, где показаны графические изображения тока 300, напряжения 310, мощности 320, сопротивления 330 и частоты 340 в генераторе 30 при отсутствии нагрузки, при малой нагрузке и при большой нагрузке соответственно. На ФИГ. 6 представлены кривые тока 300, напряжения 310, мощности 320, сопротивления 330 и частоты 340 в одном из вариантов, генератора 30 при отсутствии нагрузки. В варианте на иллюстрации выходной ток 300 генератора 30 ступенчато изменяется. Как показано на ФИГ. 6, генератор 30 первоначально приводится в действие в момент времени 0, что приводит к увеличению тока 300 до первого заданного значения I1, равного примерно 100 мА. Ток 300 поддерживается на первой заданной отметке I1 в течение первого периода T1. В конце первого периода T1, например, примерно через 1 секунду в проиллюстрированном варианте заданная величина I тока 3001 изменяется, например, ступенчато при помощи генератора 30 в соответствии с ПО, например, алгоритмом (алгоритмами) ступенчатой функции 402, до второго заданного значения I2, равного примерно 175 мА, в течение второго периода T2, например, около 2 секунд в проиллюстрированном варианте. В конце второго периода T2, например, примерно через 3 секунды в проиллюстрированном варианте, ПО генератора 30 изменяет ток 300 до третьего установленного значения I3, равного примерно 350 мА. Напряжение 310, ток 300, мощность 320 и частота реагируют минимально, поскольку в системе отсутствует нагрузка.
На ФИГ. 7 изображены кривые тока 310, мощности 320, сопротивления 330 и частоты 340 в одном из вариантов, генератора 30 в состоянии малой нагрузки. На ФИГ. 7 генератор 30 приводится в действие в момент времени 0, в результате чего ток 300 увеличивается до первого заданного значения тока 300 I1, равного примерно 100 мА. Примерно через 1 секунду заданное значение тока 300 изменяется в генераторе 30 с помощью ПО до уровня I2 175 мА, а затем снова примерно через 3 секунды генератор 30 изменяет заданную отметку тока 300 до I3 350 мА. Напряжение 310, ток 300, мощность 320 и частота 340 показаны в условиях отклика на малую нагрузку, как и на ФИГ. 4.
На ФИГ. 8 представлено графическое изображение кривых тока 300, напряжения 310, мощности 320, сопротивления 330 и частоты 340 в одном из вариантов, генератора 30 в условиях высокой нагрузки. На ФИГ. 8 генератор 30 приводится в действие в момент времени 0, в результате чего ток 300 увеличивается до первой заданной величины I1, составляющей около 100 мА. Примерно через 1 секунду заданная величина тока 300 изменяется в генераторе 30 с помощью ПО до величины I2, составляющей около 175 мА, а затем снова примерно через 3 секунды генератор 30 изменяет заданную величину тока 300 до отметки I3, составляющей около 350 мА. Напряжение 310, ток 300, мощность 320 и частота 340 показаны в условиях отклика на высокую нагрузку, как на ФИГ. 5.
Специалисты в этой области поймут, что заданные значения ступенчатой функции тока 300 (например, I1, I2, I3) и временные интервалы или периоды (например, T1, T2) длительности для каждого заданного значения ступенчатой функции, описанной на ФИГ. 6-8, не ограничиваются значениями, указанными в настоящем документе и могут иметь любую величину, требующуюся для данного набора хирургических процедур. Может быть выбрано большее или меньшее число заданных величин тока и периодов длительности, в зависимости от данного набора характеристик конструкции или ограничений по рабочим параметрам. Как уже говорилось выше, периоды могут быть заданы путем программирования, а могут быть переменными, в зависимости от измеряемых системных характеристик. Количество вариантов в данном контексте не ограничено. Например, в некоторых вариантах, амплитуды (заданные значения) последовательных импульсов могут увеличиваться, уменьшаться или оставаться одинаковыми. Например, в некоторых вариантах, амплитуды последовательных импульсов могут быть равными. Также, в некоторых вариантах, временные интервалы или периоды импульсов могут иметь любое подходящее значение, в том числе, например, доли секунды, минуты, часы и т.д. В одном из примерных вариантов, временной интервал или периоды импульсов могут составлять 55 секунд.
Подробное описание работы различных вариантов хирургической системы 19 может сопровождаться дальнейшим описанием работы вышеупомянутой хирургической системы 19 в аспекте процесса разрезания и коагуляции кровеносного сосуда с использованием хирургического инструмента, в состав которого входит устройство ввода 406, и возможностей измерения сопротивления датчика, описанные со ссылкой на ФИГ. 9. Несмотря на то, что здесь приводится описание конкретного процесса с операционными подробностями, следует понимать, что данный процесс является всего лишь примером того, как может реализовываться хирургической системой 19 общий функционал, описанный в настоящем документе. Кроме того, данный процесс необязательно должен выполняться в порядке, приведенном в настоящем документе, если не указано иное. Как уже говорилось выше, устройство ввода 406 может использоваться для программирования ступенчатого выходного сигнала (например, тока, напряжения, частоты) в механизме ультразвукового датчика 50/лезвия 79.
Таким образом, обращаясь сейчас к ФИГ. 1-3 и 6-9, один из методов запечатывания сосуда включает в себя отделение и перемещение внутреннего мышечного слоя сосуда от адвентициальной оболочки перед применением обычной ультразвуковой энергии для рассечения и запечатывания сосуда. Хотя в традиционных методиках для такого отделения к зажимному элементу 60 прикладывается сила большей величины, здесь приводится информация об альтернативном устройстве и методе разрезания и коагуляции ткани, которые подразумевают использование не только силы зажима. Для того, чтобы отделить слои ткани сосуда более эффективно, например, генератор 30 можно запрограммировать на применение ступенчатой функции частоты в ультразвуковом датчике 50 для механического перемещения лезвия 79 во множестве режимов в соответствии со ступенчатой функцией. В одном из вариантов, ступенчатая функция частоты может быть запрограммирована при помощи пользовательского интерфейса 406, в котором пользователь может выбрать программу ступенчатой функции, частоту (f) для каждого шага и соответствующий временной период (T) длительности для каждого из шагов, для которых приводится в возбуждение датчик 50. Пользователь может запрограммировать полный операционный цикл путем установки нескольких частот для нескольких периодов для выполнения различных хирургических процедур.
В определенных вариантах, амплитуды последовательных шагов или импульсов могут увеличиваться, уменьшаться или оставаться одинаковыми. Например, в некоторых вариантах, амплитуды последовательных импульсов могут быть равными. Также, в некоторых формах, временные интервалы или периоды импульсов могут иметь любое подходящее значение, в том числе, например, доли секунды, минуты, часы и т.д. В одном из примерных вариантов временной интервал импульсов может составлять 55 секунд.
В одном из вариантов, первая ультразвуковая частота может быть первоначально задана для механического отделения мышечного слоя ткани сосуда перед применением второй ультразвуковой частоты для разделения и запечатывания сосуда. В качестве примера, который не является ограничением, в соответствии с одним из вариантов исполнения программы, первоначально генератор 30 запрограммирован на выдачу первого управляющего сигнала частоты f1 в течение первого периода времени T1 (например, менее примерно 1 секунды), где первая частота f1 значительно далека от резонансной, например, fo/2, 2fo или других структурных резонансных частот, где fo - резонансная частота (например, 55,5 кГц). Благодаря первой частоте f1 возникает механическая вибрация низкого уровня в лезвии 79, которое в сочетании с усилием зажима механически отделяет мышечный слой ткани сосуда (субтерапевтический), не вызывая значительного нагрева, который обычно происходит при резонансе. По истечении первого периода T1, генератор 30 запрограммирован на автоматическое переключение управляющей частоты на резонансную частоту fo в течение второго периода T2 для рассечения и запечатывания сосуда. Длительность второго периода T2 может быть запрограммирована или определена временем, затрачиваемым на разрезание и запечатывание сосуда, которое определяет пользователь, или которое может зависеть от измеряемых системных характеристик, таких как сопротивление датчика Z, см. более подробное описание ниже.
В одном из вариантов, процесс рассечения ткани/сосуда (например, отделение мышечного слоя сосуда от адвентициального слоя и рассечение/запечатывание сосуда) может быть автоматизировано путем наблюдения за характеристиками сопротивления Z датчика 50 для определения, когда происходит рассечение ткани/сосудов. Сопротивление Z может быть соотнесено с рассечением мышечного слоя и рассечением/запечатыванием сосуда в целях обеспечения пускового механизма для процессора 400 для генерирования выходного сигнала ступенчатой функции частоты и/или тока. Как уже было сказано ранее в отношении ФИГ. 9, сопротивление Z датчика 50 может быть рассчитано процессором 400 на основе тока, который проходит через датчик 50 и напряжения, которое подается на датчик 50, пока лезвие 79 находится под различными нагрузками. Поскольку сопротивление Z датчика 50 пропорционально нагрузке, применимой к лезвию 79, по мере того как нагрузка на лезвие 79 увеличивается, сопротивление Z датчика 50 увеличивается, а по мере того, как нагрузка на лезвие 79 уменьшается, сопротивление Z датчика 50 уменьшается. Таким образом, можно наблюдать за сопротивлением Z датчика 50 в целях отслеживания отслоения внутреннего слоя мышечной ткани сосуда от адвентициального слоя, а также для определения, когда сосуд рассечен и запечатан.
В одном из вариантов, ультразвуковой хирургический инструмент 110 может использоваться в соответствии с запрограммированным алгоритмом ступенчатой функции, реагирующим на сопротивление датчика Z. В одном из вариантов, выходной сигнал ступенчатой функции частоты может инициироваться на основе сравнения сопротивления датчика Z с одним или более заранее определенными порогами, которые были соотнесены с нагрузками ткани на лезвие 79. Когда сопротивление датчика Z переходит в значение выше или ниже (например, пересекает) порогового, процессор 400 отправляет цифровой частотный сигнал 418 на ЦГПС схемы 420 для изменения частоты управляющего сигнала 416 на заранее определенный шаг в соответствии с алгоритмом (алгоритмами) ступенчатой функции 402, реагирующим на сопротивление датчика Z. Во время работы, лезвие 79 первоначально располагается на области ткани, на которую оказывается воздействие. Процессор 400 применяет первый цифровой частотный сигнал 418 для установки первой управляющей частоты f1, которая не равна резонансной (например, fo/2, 2fo или других структурных резонансных частот, где fo - резонансная частота). Управляющий сигнал 416 отправляется на датчик 50 после активации переключателя 312a на рукояточном блоке 68 или ножного переключателя 434. В течение этого периода ультразвуковой датчик 50 механически активирует лезвие 79 на первой управляющей частоте f1. Для облегчения данного процесса, к зажимному элементу 60 и лезвию 79 может быть применена сила или нагрузка. В течение этого периода процессор 400 отслеживает сопротивление датчика Z до тех пор, пока нагрузка на лезвие 79 не поменяется и сопротивление датчика Z не пересечет заранее определенный порог, что будет означать, что слой ткани рассечен. Затем процессор 400 отправляет второй цифровой частотный сигнал 418 для установки второй управляющей частоты f2, например, резонансной частоты fo или другой подходящей частоты для рассечения, коагуляции и запечатывания ткани. Еще одна порция ткани (например, сосуда) затем захватывается зажимным элементом 60 и лезвием 79. Преобразователь 50 сейчас снабжается энергией от управляющего сигнала 416 на второй управляющей частоте f2 при помощи активации либо ножного переключателя 434, либо переключателя 312a на рукояточном блоке 68. Специалисты в этой области поймут, что выходной управляющий ток (I) также может ступенчато изменяться, как указано в описании к ФИГ. 6-8 в зависимости от сопротивления датчика Z.
В соответствии с алгоритмом одной ступенчатой функции 402, процессор 400 изначально устанавливает первую управляющую частоту f1, которая значительно далека от резонансной, для отделения внутреннего мышечного слоя сосуда от адвентициального слоя. В течение этого периода работы, процессор 400 отслеживает сопротивление датчика Z для определения момента, когда внутренний мышечный слой рассечен или отделен от адвентициального слоя. Поскольку сопротивление датчика Z соотнесено с нагрузкой, применяемой к лезвию 79, например, при разрезании большего объема ткани нагрузка на лезвие 79 и сопротивление датчика Z уменьшаются. Рассечение внутреннего мышечного слоя происходит тогда, когда сопротивление датчика Z падает ниже заданного порога. Когда изменение в сопротивлении датчика Z свидетельствует о том, что сосуд был отделен от внутреннего мышечного слоя, процессор 400 устанавливает управляющую частоту на уровень резонансной частоты fo. Сосуд затем зажимается между лезвием 79 и зажимным элементом 60, а датчик 50 приводится в действие путем активирования либо ножного переключателя, либо переключателя на рукояточном блоке 68 для рассечения и запечатывания сосуда. В одном из вариантов, изменение сопротивления Z может варьироваться в пределах величины, равной 1,5-4 базовым сопротивлениям от начального момента контакта с тканью непосредственно до момента рассечения и запечатывания мышечного слоя.
На ФИГ. 10 изображен один из вариантов хирургической системы 190, в состав которой входит ультразвуковой хирургический инструмент 120 и генератор 500, в состав которого входит модуль сопротивления ткани 502. Несмотря на то, что в описываемом варианте генератор 500 изображен отдельно от хирургического инструмента 120, в одном из вариантов, генератор 500 может составлять единое целое с хирургическим инструментом 120, образуя единую хирургическую систему 190. В одном из вариантов, генератор 500 может быть выполнен с возможностью отслеживания электрического сопротивления ткани Zt и управления характеристиками времени и уровня мощности в зависимости от сопротивления ткани Zt. В одном из вариантов, сопротивление ткани Ztможет определяться путем применения сигнала субтерапевтической радиочастоты (РЧ) к ткани и измерения тока, проходящего через ткань при помощи возвратного электрода на зажимном элементе 60. В варианте, проиллюстрированном на ФИГ. 10, часть хирургической системы 190, в которой расположен концевой зажим 810, включает в себя блок рычага зажима 451, соединенного с дистальным концом внешней защитной трубы 72. Лезвие 79 выступает первым (например, подающим питание) электродом, а блок зажимного рычага 451 включает в себя электрически проводящий блок, который выступает вторым (например, возвратным) электродом. Модуль сопротивления ткани 502 соединен с лезвием 79 и механизмом зажимного рычага 451 посредством подходящей передающей среды - кабеля 504. Кабель 504 включает в себя несколько электрических проводников для подачи напряжения на ткань и обеспечения обратного тракта для тока, проходящего через ткань обратно в модуль сопротивления 502. В различных вариантах, модуль сопротивления ткани 502 может быть интегрирован в генератор 500 или представлять собой отдельную схему, соединенную с генератором 500 (изображенную пунктиром для иллюстрации данной опции). Генератор 500 фактически идентичен генератору 30, но имеет дополнительный элемент - модуль сопротивления ткани 502.
На ФИГ. 11 изображен один из вариантов системы привода 321 генератора 500, в состав которой входит модуль сопротивления ткани 502. Система привода 321 генерирует ультразвуковой электрический управляющий сигнал 416 для запуска ультразвукового датчика 50. В одном из вариантов, модуль сопротивления ткани 502 может быть выполнен с возможностью измерения сопротивления Zt ткани, зажатой между лезвием 79 и механизмом зажимного рычага 451. Модуль сопротивления ткани 502 включает в себя РЧ-осциллятор 506, схему обнаружения напряжения 508 и схему обнаружения тока 510. Схемы обнаружения напряжения и тока 508, 510 реагируют на РЧ-напряжение vrf, подаваемое на электрод лезвия 79, и РЧ-ток irf, проходящий через электрод лезвия 79, ткань и проводящую часть механизма зажимного рычага 451. Обнаруженные напряжение vrfи ток irf преобразуются в цифровую форму посредством КАСЦ 432 при помощи аналогового мультиплексора 430. Процессор 400 получает оцифрованный сигнал 433 от КАСЦ 432 и определяет сопротивление ткани Zt путем расчета отношения РЧ-напряжения RF vrf к току irf, измеряемых схемой обнаружения напряжения 508 и схемой обнаружения тока 510. В одном из вариантов, факт рассечения внутреннего мышечного слоя и ткани может идентифицироваться путем обнаружения сопротивления ткани Zt. Таким образом, обнаружение сопротивления ткани Zt может быть совмещено с автоматизированным процессом отделения внутреннего мышечного слоя от внешнего адвентициального слоя перед рассечением ткани, не вызывая значительного нагрева, который обычно происходит при резонансе.
На ФИГ. 12 изображен один из вариантов механизма зажимного рычага 451, который может использоваться с хирургической системой 190 (ФИГ. 10). В проиллюстрированном варианте, механизм зажимного рычага 451 включает в себя проводящий кожух 472, установленный на базу 449. Проводящий кожух 472 - это проводящая часть механизма зажимного рычага 451, которая выступает вторым, например, обратным электродом. В одном из вариантов, исполнения зажимной рычаг 56 (ФИГ. 3) может являться базой 449, на которую устанавливается проводящий кожух 472. В различных вариантах, проводящий кожух 472 может включать в себя центральную часть 473 и по меньшей мере одну идущую книзу боковую стенку 474, которая может простираться ниже нижней поверхности 475 базы 449. В проиллюстрированном варианте, проводящий кожух 472 имеет две боковые стенки 474, идущие книзу вдоль противоположных сторон базы 449. В других вариантах, центральная часть 473 может иметь по меньшей мере одну апертуру 476, которая может быть выполнена с возможностью вставки в нее выступа 477, выходящего из базы 449. В таких вариантах, выступы 477 могут устанавливаться путем тугой посадки в апертуры 476 для закрепления проводящего кожуха 472 на базе 449. В других вариантах, выступы 477 могут деформироваться после вставки в апертуры 476. В различных вариантах, для закрепления проводящего кожуха 472 на базе 449 могут использоваться элементы крепления.
В различных вариантах, механизм зажимного рычага 451 может включать в себя непроводящий или изолирующий материал, например, пластик и/или резину, например, расположенный между проводящим кожухом 472 и базой 449. Изолирующий материал может предотвращать движение тока или короткие замыкания между проводящим кожухом 472 и базой 449. В различных вариантах, база 449 может включать в себя по меньшей мере одну апертуру 478, которая может быть выполнена с возможностью вставки в нее поворотного стержня (отсутствует на фигуре). Поворотный стержень может быть выполнен с возможностью закрепления базы 449 при помощи поворотного соединения на защитной трубе 72 (ФИГ. 10), например, так, чтобы механизм зажимного рычага 451 мог вращаться между открытой и закрытой позициями относительно защитной трубы 72. В проиллюстрированном варианте, база 449 включает в себя две апертуры 478, расположенные на противоположных сторонах базы 449. В одном из вариантов, поворотный стержень может изготавливаться из непроводящего или изолирующего материала или включать его в себя, например, пластик и/или резину, который может предназначаться для предотвращения движения тока по защитной трубе 72, даже если база 449 имеет электрический контакт с проводящим кожухом 472, например. Могут использоваться дополнительные механизмы зажимного рычага, в состав которых входят различные виды электродов. Примеры таких блоков рычага зажима описаны в общих заявках и заявках на патент США за серийными номерами 12/503 769, 12/503 770 и 12/503 и 766, каждая из которых является частью настоящего документа по ссылке во всей полноте.
На ФИГ. 13 представлено схематическое изображение модуля сопротивления ткани 502, соединенного с лезвием 79 и механизмом зажимного рычага 415, между которыми расположена ткань 514. Что касается ФИГ. 10-13: генератор 500 включает в себя модуль сопротивления ткани 502, выполненный с возможностью отслеживания сопротивления ткани 514 (Zt), расположенной между лезвием 79 и механизмом зажимного рычага 451, во время процесса рассечения ткани. Модуль сопротивления ткани 502 соединен с ультразвуковым хирургическим инструментом 120 при помощи кабеля 504. Кабель 504 включает в себя первый «питающий» проводник 504a, соединенный с лезвием 79 (например, положительный [+] электрод) и второй «обратный» проводник 504b, соединенный с проводящим кожухом 472 (например, отрицательный [-] электрод) механизма зажимного рычага 451. В одном из вариантов, РЧ-напряжение vrf подается на лезвие 79 для создания РЧ-тока irf, который течет по ткани 514. Второй проводник 504б обеспечивает обратный тракт для тока irf, который поступает назад в модуль сопротивления ткани 502. Дистальный конец обратного проводника 504b соединен с проводящим кожухом 472 так, чтобы ток irf мог идти от лезвия 79 по ткани 514, расположенной между проводящим кожухом 472 и лезвием 79, и по проводящему кожуху 472 в обратный проводник 504b. Модуль сопротивления 502 включается в схему при помощи первого и второго проводников 504a, b. В одном из вариантов, РЧ-энергия может быть передана лезвию 79 через ультразвуковой датчик 50 и волновод 80 (ФИГ. 2) Следует отметить, что РЧ-энергия, применяемая к ткани 514 в целях измерения сопротивления ткани Zt, представляет собой низкоуровневый субтерапевтический сигнал, который не имеет большого значения или не имеет значения вообще для воздействия на ткань 514.
Подробное описание работы различных вариантов хирургической системы 190 может сопровождаться дальнейшим описанием работы вышеупомянутой хирургической системы 190 в отношении ФИГ. 10-13 в аспекте процесса разрезания и коагуляции кровеносного сосуда с использованием хирургического инструмента, в состав которого входит устройство ввода 406 и модуль сопротивления ткани 502. Несмотря на то, что здесь приводится описание конкретного процесса в привязке к операционным нюансам, следует понимать, что данный процесс является всего лишь примером того, как может реализовываться хирургической системой 190 общий функционал, описанный в настоящем документе. Кроме того, данный процесс необязательно должен выполняться в порядке, приведенном в настоящем документе, если не указано иное. Как уже говорилось выше, устройство ввода 406 может использоваться для программирования выходного сигнала ступенчатой функции (например, тока, напряжения, частоты), подающегося на блок ультразвукового датчика 50/лезвия 79.
В одном из вариантов, первый проводник или провод может соединяться с внешней защитной трубкой 72 инструмента 120, а второй проводник или провод может соединяться с лезвием 79/датчиком 50. По характеру конструкции, лезвие 79 и датчик 50 электрически изолированы от внешней защитной трубки 72, так же как и другие элементы механизма активации инструмента 120, в том числе база 449 и внутренняя защитная трубка 76. Внешняя защитная трубка 79 и другие элементы механизма активации, в том числе база 449 и внутренняя защитная трубка 76 электрически соединены в последовательную цепь друг с другом - то есть выполнены из металла и соприкасаются друг с другом. Таким образом, при соединении первого проводника с внешней защитной трубкой 72 и при соединении второго проводника с лезвием 79 или датчиком 50 так, чтобы ткань находилась между этими двумя проводящими каналами, система может отслеживать электрическое сопротивление ткани, пока ткань контактирует с лезвием 79 и базой 449. Для облегчения этого контакта, сама база 449 может иметь элементы, выступающие наружу или, возможно, вниз для обеспечения контакта с тканью, при этом проводящий кожух 472 интегрирован в базу 449.
В одном из вариантов, ультразвуковой хирургический инструмент 120 можно использовать в соответствии с запрограммированным алгоритмом ступенчатой функции 402, реагирующим на сопротивление ткани Zt. В одном из вариантов, выходной сигнал ступенчатой функции частоты может быть инициирован на основе сравнения сопротивления ткани Zt и заданных порогов, соотнесенных с различными состояниями ткани (например, обезвоживание, рассечение, запечатывание). Когда сопротивление ткани Zt переходит значение, расположенное выше или ниже (например, пересекает) порогового, процессор 400 отправляет цифровой частотный сигнал 418 на схему ЦГПС 420 для изменения частоты ультразвукового осциллятора на заданный шаг в соответствии с алгоритмом ступенчатой функции 402, реагирующим на сопротивление ткани Zt.
Во время работы лезвие 79 расположено в области воздействия на ткань. Ткань 514 зажимается между лезвием 79 и механизмом зажимного рычага 451 так, чтобы лезвие 79 и проводящий кожух 472 образовывали электрический контакт с тканью 514. Процессор 400 применяет первый цифровой частотный сигнал 418 для задания первой управляющей частоты f1, которая не равна резонансной (например, fo/2, 2fo или других структурных резонансных частот, где fo - резонансная частота). На лезвие 79 подается электропитание при помощи низкоуровневого субтерапевтического РЧ-напряжения vrf, идущего от модуля сопротивления ткани 502. Управляющий сигнал 416 подается на датчик 50/лезвие 79 после активации переключателя 312a на рукояточном блоке 68 или ножного переключателя 434 до тех пор, пока сопротивление ткани Zt не изменяется на заданную величину. Затем к блоку рычага зажима 451 и лезвию 79 применяется сила или нагрузка. В течение этого периода, ультразвуковой датчик 50 механически активирует лезвие 79 на первой управляющей частоте f1, в результате чего ткань 514 начинает обезвоживаться под действием ультразвука, который работает между лезвием 79 и одной или более зажимными пластинами 58 механизма зажимного рычага 451, что приводит к увеличению сопротивления ткани Zt. В итоге, по мере того как ткань рассекается под действием ультразвука и приложенной силы зажима, сопротивление ткани Zt становится очень высоким или бесконечным, когда ткань рассекается полностью, и проводящий тракт между лезвием 79 и проводящим кожухом 472 исчезает. Специалисты этой области поймут, что выходной управляющий ток (I) также может ступенчато изменяться, как указано в описании к ФИГ. 6-8, в зависимости от сопротивления датчика Zt.
В одном из вариантов, сопротивление ткани Zt может отслеживаться модулем сопротивления 502 в соответствии со следующим процессом. Измеряемый РЧ-ток i1 подается через первый проводник возбуждения 504a на лезвие 79 через ткань 514 и назад на модуль сопротивления 502 через проводящий кожух 472 и второй проводник 504b. По мере того как ткань 514 обезвоживается и разрезается под действием ультразвука лезвием 79, работающим вплотную к одной или более зажимным пластинам 58, сопротивление ткани 514 увеличивается, и поэтому ток i1 в обратном тракте, то есть, во втором проводнике 504b, уменьшается. Модуль сопротивления 502 измеряет сопротивление ткани Zt и проводит репрезентативный сигнал к КАСЦ 432, цифровой выходной сигнал 433 которого отправляется на процессор 400. Процессор 400 рассчитывает сопротивление ткани Zt на основе измеренных величин vrf и irf. Процессор 400 ступенчато изменяет частоту на любой подходящий шаг по восходящей или нисходящей в ответ на изменения в сопротивлении ткани Zt. Процессор 400 контролирует управляющий сигнал 416 и может сделать любые необходимые подстройки в амплитуде и частоте в зависимости от сопротивления ткани Zt. В одном из вариантов, процессор 400 может отключить управляющий сигнал 416, когда сопротивление ткани Zt достигает заданного порогового значения.
Таким образом, в качестве примера, но не ограничения, в одном из вариантов, можно применять ультразвуковой хирургический инструмент 120 в соответствии с запрограммированным алгоритмом ступенчатого выходного сигнала для отделения внутреннего слоя сосуда от адвентициального слоя перед рассечением и запечатыванием сосуда. Как уже говорилось ранее, в соответствии с одним из алгоритмов ступенчатой функции, процессор 400 изначально устанавливает первую управляющую частоту f1, которая значительно отличается от резонансной. Преобразователь 50 активируется для отделения внутреннего мышечного слоя сосуда от адвентициального слоя, а модуль сопротивления ткани 502 подает сигнал субтерапевтического РЧ-напряжения vrf на лезвие 79. В течение этого периода T1 работы процессор 400 отслеживает сопротивление ткани Zt и определяет, когда внутренний мышечный слой рассечен или отделен от адвентициального слоя. Сопротивление ткани Zt соотносится с нагрузкой на лезвие 79, например, когда ткань становится обезвоженной или когда ткань рассечена, сопротивление ткани Zt становится крайне высоким или бесконечным. Изменение в сопротивлении ткани Zt свидетельствует о том, что сосуд был отделен или отсечен от внутреннего мышечного слоя, и генератор 500 отключается на второй промежуток времени T2. Процессор 400 затем устанавливает управляющую частоту на величину резонансной частоты fo. Затем сосуд захватывается лезвием 79 и механизмом зажимного рычага 451, а датчик 50 запускается заново для рассечения и запечатывания сосуда. Благодаря постоянному наблюдению за сопротивлением ткани Zt можно определить, когда сосуд рассечен и запечатан. Кроме того, сопротивление ткани Zt может отслеживаться для определения окончания процесса разрезания и/или коагуляции ткани или для остановки активации ультразвукового генератора 500, когда сопротивление ткани Zt достигает заданного порогового значения. Пороговое значение сопротивления ткани Zt может быть выбрано, например, для индикации рассечения сосуда. В одном из вариантов, сопротивление ткани Zt может варьироваться от 10 до 1000 Ом от начального момента до момента, когда мышечный слой почти рассечен и запечатан.
Заявители обнаружили, что эксперименты, при которых меняются заданные значения тока (как увеличиваются, так и уменьшаются) и времени выполнения, показывают, что описанные варианты могут использоваться для отделения внутреннего мышечного слоя от внешнего адвентициального слоя перед окончанием рассечения, в результате чего легче происходит остановка кровотечения, а в области рассечения выделяется потенциально меньше общей энергии (тепла). Кроме того, хотя хирургические инструменты 100, 120 были описаны с точки зрения схем обнаружения порогового сопротивления, благодаря которым можно определить отделение мышечного слоя от адвентициального, другие варианты, которые не имеют никаких схем обнаружения, также являются предметом рассмотрения в настоящем документе. Например, варианты хирургических инструментов 100, 120 могут использоваться в упрощенных хирургических системах, где перед применением резонансной мощности для разрезания ткани применяется нерезонансная мощность для отделения слоев в течение заданного времени - примерно 1 секунды или менее. Количество вариантов в данном контексте не ограничено.
Подробное описание работы различных вариантов хирургической системы 19 (ФИГ. 1) и 190 (ФИГ. 10), может сопровождаться дальнейшим описанием работы вышеупомянутых хирургических систем 19, 190 в аспекте процесса разрезания и коагуляции ткани с использованием хирургического инструмента, в состав которого входит устройство ввода 406 и модуль сопротивления ткани 502. Несмотря на то, что здесь приводится описание конкретного процесса в привязке к операционным подробностями, следует понимать, что данный процесс является всего лишь примером того, как хирургическими системами 19, 190 может реализовываться общий функционал, описанный в настоящем документе. В дополнение к этому, данный процесс необязательно должен выполняться в порядке, приведенном в настоящем документе, если не указано иное. Как уже говорилось выше, устройство ввода 406 может использоваться для программирования ступенчатого выходного сигнала (например, тока, частоты) в механизме ультразвукового датчика 50/лезвия79.
На ФИГ. 14 изображен вариант способа 600 приведения в движение концевого зажима, соединенного с ультразвуковым механизмом привода хирургического инструмента. Способ 600 и любые другие методы, алгоритмы и т.д., описанные в настоящем документе, могут быть инициированы любым подходящим способом. Например, способ 600 и любые другие методы, алгоритмы и т.д. описанные в настоящем документе, могут быть инициированы после ввода данных пользователем посредством любых клавиш и их комбинаций, переключателей и/или ножных педалей, в том числе, например, описанных в настоящем документе. В отношении ФИГ. 1-3 и 6-14, в качестве примера, но не ограничения, ультразвуковые хирургические инструменты 100, 120 могут применяться в соответствии со способом 600 для отделения внутреннего мышечного слоя сосуда от адвентициального слоя перед рассечением и запечатыванием сосуда. Таким образом, в различных вариантах, концевой зажим (например, концевой зажим 81, 810) хирургического инструмента (например, хирургического инструмента 100, 120) может приводиться в действие в соответствии со способом 600. Генератор (например, генератор 30, 500) соединен с ультразвуковой системой привода. Ультразвуковая система привода включает в себя ультразвуковой датчик (например, ультразвуковой датчик 50), соединенный с волноводом (например, волноводом 80). Концевой зажим 81 соединен с волноводом 80. Ультразвуковая система привода и концевой зажим 81 выполнены с возможностью резонирования на резонансной частоте (например, 55,5 кГц). В одном из вариантов, на этапе 602 генератор 30 генерирует первый ультразвуковой управляющий сигнал. На этапе 604 ультразвуковой датчик 50 активируется первым ультразвуковым управляющим сигналом на первый период в ответ на активацию переключателя (например, переключателя 34) на рукояточном блоке (например, рукояточном блоке 68) или ножного переключателя (например, ножного переключателя 434), соединенного с генератором 30. По истечении первого периода, на этапе 606 генератор 30 генерирует второй ультразвуковой управляющий сигнал. На этапе 608 ультразвуковой датчик 50 активируется вторым ультразвуковым управляющим сигналом на второй период после активации переключателя 34 на рукояточном блоке 68 или ножного переключателя 434, соединенного с генератором 30. Первый управляющий сигнал отличается от второго управляющего сигнала в течение, соответственно, первого и второго периодов. Первый и второй управляющие сигналы определяют кривую ступенчатой функции в течение первого и второго периодов.
В одном из вариантов, генератор 30 генерирует третий ультразвуковой управляющий сигнал. Ультразвуковой датчик 50 активируется третьим ультразвуковым управляющим сигналом в течение третьего периода. Третий управляющий сигнал отличается от второго управляющего сигнала на протяжении первого, второго и третьего периодов. Первый, второй и третий управляющий сигналы определяют кривую ступенчатой функции в течение первого, второго и третьего периодов. В одном из вариантов, генерирование первого, второго и третьего ультразвуковых управляющих сигналов предполагает генерирование соответствующих первого, второго и третьего управляющих токов и активацию ультразвукового датчика 50 при помощи первого управляющего тока в течение первого периода, активацию ультразвукового датчика 50 при помощи второго управляющего тока в течение второго периода и активацию ультразвукового датчика 50 при помощи третьего управляющего тока в течение третьего периода.
В определенных вариантах, первый, второй и третий управляющий токи могут увеличиваться, уменьшаться или оставаться одинаковыми по отношению друг к другу. Например, в определенных вариантах, некоторые из первого, второго и третьего управляющих токов равны или равны все из них. В дополнение к этому, в определенных вариантах, первый, второй и третий периоды могут иметь любую подходящую длительность, в том числе, например, доли секунды, минуты, часы и т.д. В одном из описанных в примере вариантов некоторые из первого, второго и третьего периодов или же все эти периоды могут длиться 55 секунд.
В одном из вариантов, генератор 30 генерирует первый ультразвуковой управляющий сигнал на первой частоте, которая не равна резонансной частоте. Ультразвуковой датчик 50 затем активируется при помощи первого ультразвукового управляющего сигнала на первой частоте в течение первого периода. Запуск на первой частоте вызывает первый уровень механической вибрации концевого зажима 81, подходящий для отделения первой ткани от второй ткани, например, отделения внутреннего мышечного слоя сосуда от адвентициального слоя. Генератор 30 генерирует второй ультразвуковой управляющий сигнал на резонансной частоте, например, 55,5 кГц, а затем активирует ультразвуковой датчик 50 при помощи второго ультразвукового управляющего сигнала на резонансной частоте в течение второго периода, следующего за первым. Активация на второй, резонансной, частоте вызывает второй уровень механической вибрации концевого зажима 81, подходящий для рассечения и запечатывания первой ткани, такой как сосуд, после того, как она была отделена от внутреннего мышечного слоя. В одном из вариантов, второй ультразвуковой управляющий сигнал на резонансной частоте генерируется автоматически генератором 30 по истечении первого периода. В одном из вариантов, первая частота значительно отличается от резонансной частоты, а первый период длится менее одной секунды. Например, в одном из вариантов, первая частота определяется следующим уравнением: f1=2*fo, где f1 - первая частота, а fo- резонансная частота. В другом варианте первая частота определяется следующим уравнением: f1=fo/2, где f1 - первая частота, а fo - резонансная частота. Предполагается также, что первый, второй и третий ультразвуковые управляющие сигналы включают вибрационные режимы ультразвукового датчика 50 в продольном, искривленном и крутильном режимах и их гармонические колебания.
В одном из вариантов, генератор 30 отслеживает измеряемую характеристику ультразвуковой системы привода и генерирует либо первый, либо второй управляющий сигналы в зависимости от измеряемой характеристики. Например, генератор 30 отслеживает сопротивление Z ультразвукового датчика 50. Генератор 30 имеет электронную схему, способную измерять сопротивление датчика 50. Например, схема чувствительности по току (например, схема чувствительности по току 426) обнаруживает ток, проходящий через датчик 50, а схема чувствительности по напряжению (например, схема чувствительности по напряжению 428) обнаруживает выходное напряжение, подаваемое на датчик 50. Мультиплексор (например, мультиплексор 430) направляет соответствующий аналоговый сигнал на конвертер аналогового сигнала в цифровой (например, КАСЦ 432), цифровой выходной сигнал которого подается на процессор (например, процессор 400). Процессор 400 рассчитывает сопротивление датчика Z на основе измеренных величин тока и напряжения.
В одном из вариантов, генератор 500 имеет модуль сопротивления (например, модуль сопротивления ткани 502) для измерения сопротивления участка ткани, контактирующего с концевым зажимом (например, концевым зажимом 810). Модуль сопротивления 502 включает в себя РЧ-осциллятор (например, РЧ-осциллятор 506), который генерирует субтерапевтический РЧ-сигнал. Субтерапевтический РЧ-сигнал отправляется на ту часть концевого зажима 810, где расположено лезвие (например, лезвие 79), которая становится подающим питание электродом. Участок ткани зажимается между концевым зажимом 810 и возвратным электродом механизма зажимного рычага (например, механизма зажимного рычага 451) и сопротивление ткани (например, ткани 514). Сопротивление ткани затем измеряется при помощи схемы чувствительности по напряжению (например, схемы чувствительности по напряжению 508) и схемы чувствительности по току (например, схемы чувствительности по току 510) модуля сопротивления 502. Эти сигналы отправляются на КАСЦ 432 с помощью мультиплексора 430. Цифровой выходной сигнал КАСЦ 432 передается на процессор 400, который рассчитывает сопротивление ткани Zt на основе измеренных величин тока, идущего через ткань, и напряжения, подаваемого на ту часть концевого зажима 810, где расположено лезвие 79.
На ФИГ. 15A-C изображены различные варианты логических схем 700, 800, 900 для операций определения изменения в состоянии ткани, на которую производится воздействие ультразвуковым хирургическим инструментом и обеспечения обратной связи пользователю для индикации того, что состояние ткани подверглось таким изменениям или что велика вероятность того, что состояние ткани подверглось таким изменениям. Операции 700, 800, 900 и их различные сочетания могут использоваться в любом варианте исполнения, где отслеживается состояние ткани. Например, одна или более операций 700, 800, 900 и т.д. могут выполняться автоматически, когда хирургическая система находится в работе. В дополнение к этому, операции 700, 800, 900 и т.д. могут запускаться после ввода данных доктором, например, посредством одной или более кнопок, переключателей или педалей и т.д. (например, кнопок, переключателей и педалей и т.д., описанных в настоящем документе). Согласно настоящему документу, состояние ткани может подвергнуться изменению, когда ткань отделяется от других слоев ткани или кости, когда ткань разрезается или рассекается, когда ткань коагулируется и так далее во время манипуляций концевого зажима ультразвукового хирургического инструмента, такого, например, как концевой зажим 81, 810 ультразвукового хирургического инструмента 100, 120, изображенного на ФИГ. 1 и 10. Изменение в состоянии ткани может быть определено на основании вероятности возникновения отделения ткани.
В различных вариантах, обратная связь обеспечивается индикатором выходного сигнала 412, изображенным на ФИГ. 9 и 11. Индикатор выходного сигнала 412 особенно полезен в случаях, когда ткань, на которую производится воздействие при помощи концевого зажима 81, 810, находится вне поля зрения пользователя и пользователь не может видеть, когда в состоянии ткани происходит изменение. Индикатор выходного сигнала 412 сообщает пользователю о том, что в состоянии ткани произошло такое изменение, которое указано в операциях, описанных в отношении логических схем 700, 800, 900. Как уже говорилось выше, индикатор выходного сигнала 412 может быть выполнен с возможностью обеспечения различных типов обратной связи для пользователя, в том числе, среди прочего, визуальной, звуковой и/или тактильной обратной связи, сообщающей пользователю (например, хирургу, врачу) о том, что состояние ткани подверглось изменению или о состоянии ткани. В качестве примера, в числе прочих, как уже говорилось выше, можно привести визуальную обратную связь, которая включает в себя любой вид устройства визуальной индикации, в том числе лампы накаливания или светоизлучающие диоды, графический пользовательский интерфейс, дисплей, аналоговый индикатор, цифровой индикатор, гистограммный дисплей, цифровой буквенно-числовой дисплей. В качестве примера, в числе прочих, можно привести звуковую обратную связь, которая включает в себя любой вид зуммера, электронный тоновый сигнал, машинную речь, голосовой пользовательский интерфейс, служащий для взаимодействия с компьютерами посредством звуковой/речевой платформы. В качестве примера, в числе прочих, можно привести тактильную обратную связь, которая включает в себя любой вид вибраций, передаваемых через корпус рукояточного блока 68 инструмента. Изменение в состоянии ткани может быть идентифицировано при помощи датчика и измерений сопротивления ткани, как было описано выше, либо при помощи измерений напряжения, тока и частоты в соответствии с операциями, описанными в отношении логических схем 700, 800, 900, описанных ниже со ссылкой на ФИГ. 15A-C.
В одном из вариантов, логические схемы 700, 800, 900 могут быть реализованы как выполнимые модули (например, алгоритмы), включающие в себя машиночитаемые инструкции для выполнения процессором 400 (ФИГ. 9, 11, 14), находящимся в генераторе 30, 500. В различных вариантах, операции, описанные в отношении логических схем 700, 800, 900, могут быть реализованы как один или более компонентов ПО, например, программ, субпрограмм, логических схем; один или более компонентов аппаратного обеспечения, например, процессоры, ЦСП, ПЛУ, СИМ, схем, регистрирующих устройств; и/или комбинаций ПО и аппаратного обеспечения. В одном из вариантов, выполнимые инструкции для выполнения операций, описанных логическими схемами 700, 800, 900, могут храниться в памяти. При выполнении инструкций, процессор 400 определяет изменение в состоянии ткани в соответствии с операциями, описанными в логических схемах 800 и 900, и обеспечивает обратную связь пользователю при помощи индикатора выходного сигнала 412. В соответствии с такими выполнимыми инструкциями, процессор 400 отслеживает и оценивает дискретные значения напряжения, тока и/или частоты, получаемые от генератора 30, 500, и в соответствии с оценкой таких дискретных значений сигнала определяет, произошло ли изменение в состоянии ткани. Как описано ниже, изменение в состоянии ткани может быть определено в зависимости от типа ультразвукового инструмента и уровня энергии, которой питается инструмент. После получения обратной связи, операционный режим ультразвукового хирургического инструмента 100, 120 может управляться пользователем, автоматически и полуавтоматически.
На ФИГ. 15A изображена логическая схема 700 одного из вариантов определения изменения в состоянии ткани и активации в связи с ним индикатора выходного сигнала 412. Что касается логической схемы 700, показанной на ФИГ. 15A, и системы привода 32 генератора 30, показанной на ФИГ. 9, на этапе 702 та часть системы привода 32, где расположен процессор 400, снимает дискретные значения сигналов напряжения (v), тока (i) и частоты (f) генератора 30. В проиллюстрированном примере, на этапе 704 дискретные значения частоты и напряжения анализируются отдельно для определения соответствующих точек перегиба частоты и/или перепада напряжения. В других вариантах, дискретные значения сигналов тока могут отдельно анализироваться в дополнение к дискретным значениям сигналов напряжения и частоты или вместо дискретных значений сигнала напряжения. На этапе 706 настоящее дискретное значение сигнала частоты используется модулем анализа точки перегиба частоты для определения изменения в состоянии ткани, как показано на логической схеме 800 на ФИГ. 15B. На этапе 708 настоящее дискретное значение сигнала напряжения используется модулем анализа точки перепада напряжения для определения изменения в состоянии ткани, как показано на логической схеме 900 на ФИГ. 15C.
Модуль анализа точки перегиба частоты и модуль анализа точки падения напряжения определяют, произошло ли изменение в состоянии ткани, на основе соотнесенных эмпирических данных, связанных с конкретным видом ультразвукового инструмента и уровнем энергии, от которой работает инструмент. На этапе 714 результаты 710, полученные от модуля анализа точки перегиба частоты и/или результаты 712, полученные от модуля анализа точки перепада напряжения, считываются процессором 400. Процессор 400 определяет 716, свидетельствует ли результат точки перегиба частоты 710 и/или результат точки перепада напряжения 712 об изменении в состоянии ткани. Если результаты 710, 714 не свидетельствуют об изменении в состоянии ткани, процессор 400 переходит по ветке «Нет» на этап 702 и считывает дополнительное дискретное значение сигналов напряжения и частоты с генератора 30. В вариантах, использующих при анализе ток генератора, процессор 400 сейчас также считывает дополнительное дискретное значение сигнала тока от генератора 30. Если результаты 710, 714 свидетельствуют о значительном изменении в состоянии ткани, процессор 400 переходит по ветке «Да» к этапу 718 и активирует индикатор выходного сигнала 412.
Как уже говорилось выше, индикатор выходного сигнала 412 может обеспечивать визуальную, звуковую и/или тактильную обратную связь, чтобы оповестить пользователя ультразвукового хирургического инструмента 100, 120 об изменении, произошедшем в состоянии ткани. В различных вариантах, после получения обратной связи через индикатор выходного сигнала 412 рабочий режим генератора 30, 500 и/или ультразвукового инструмента 100, 120 может управляться вручную, автоматически или полуавтоматически. Рабочие режимы включают в себя, в числе прочих, отсоединение или отключение выходной мощности генератора 30, 500, уменьшение выходной мощности генератора 30, 500, циклический режим выходной мощности 30, 500, импульсный режим выходной мощности генератора 30, 500 и/или кратковременный выброс большой выходной мощности генератора 30, 500. Рабочие режимы ультразвукового инструмента после изменения в состоянии ткани могут быть выбраны, например, для минимизации нагрева концевого зажима 81, 810, например, зажимной пластины 58 (ФИГ. 1-3), в целях предотвращения или минимизации возможного повреждения хирургического инструмента 100, 120 и/или прилегающей ткани. Это полезная функция, поскольку, когда датчик 50 активирован, а между браншами концевого зажима 81, 810 ничего нет, тепло генерируется быстро, как в случае, когда происходит изменение в состоянии ткани, когда ткань значительно отстоит от концевого зажима.
На ФИГ. 15B изображена логическая схема 800, иллюстрирующая один из вариантов работы модуля анализа точки перегиба частоты. На этапе 802 процессор 400 получает дискретное значение частоты от блока 706 логической схемы 700. На этапе 804 процессор 400 рассчитывает экспоненциально взвешенное скользящее среднее (ЭВСС) для анализа перегиба частоты. ЭВСС рассчитывается для фильтрации шума генератора, идущего от дискретных значений частоты. ЭВСС рассчитывается в соответствии с уравнением скользящего среднего частоты 806 и альфа-фактора (α) 808:
Stf=αYtf+(1-α)Stf-1 (2),
где:
Stf = текущее скользящее среднее дискретизированного частотного сигнала;
Stf-1 = предыдущее скользящее среднее дискретизированного частотного сигнала;
α = коэффициент сглаживания; и
Ytf = текущий замер дискретизированного частотного сигнала.
Значение α 808 может варьироваться примерно от 0 до 1 в соответствии с выбранным коэффициентом фильтрации или сглаживания, где малые значения α 808, приближающиеся к 0, приводят к значительной фильтрации или сглаживанию, а большие значения α 808, приближающиеся к 1, приводят к незначительной фильтрации или сглаживанию. Значение α 808 может выбираться в зависимости от вида хирургического инструмента и уровня мощности. В одном из вариантов, блоки 804, 806 и 808 могут выполняться как переменный цифровой низкочастотный фильтр 810, где значение α 808 определяет точку отсечки фильтра 810. Как только дискретные значения частоты отфильтрованы, рассчитывается наклон дискретных значений частоты на этапе 812 следующим образом:
Наклон частоты = дельтаf/дельтаt (3)
Расчеты замеров наклона частоты передаются фильтру скользящего среднего с большим временем отклика 814 для расчета ЭВСС для наклона частоты в целях дальнейшего снижения шума в системе. В одном из вариантов, фильтр скользящего среднего с большим временем отклика 814 может быть реализован путем расчета ЭВСС для наклона частоты на этапе 818 в соответствии с уравнением скользящего среднего наклона частоты 820 и альфа-фактором (α') 822:
S'tf=α'Y'tf+(1-α')S'tf-1 (4)
где:
S'tf = текущее скользящее среднее наклона частоты дискретизированного частотного сигнала;
S'tf-1 = предыдущее скользящее среднее наклона частоты дискретизированного частотного сигнала;
α' = коэффициент сглаживания; и
Y'tf = текущий замер наклона дискретизированного частотного сигнала.
Значение α' 822 варьируется примерно от 0 до 1, как говорилось ранее в отношении блока цифрового фильтра 810 в соответствии с выбранным коэффициентом фильтрации или сглаживания, где малое значение α' 822, приближающиеся к 0, приводит к значительной фильтрации или сглаживанию, а большое значение α' 822, приближающиеся к 1, приводит к незначительной фильтрации или сглаживанию. Значение α' 822 может выбираться в зависимости от вида хирургического инструмента и уровня мощности.
Замеры рассчитанного наклона частоты передаются на фильтр с малым временем отклика 816 для расчета скользящего среднего наклона частоты. На этапе 824 фильтр с малым временем отклика 816 рассчитывает скользящее среднее Частоты наклона на основании ряда замеров 826.
В проиллюстрированном варианте выходной сигнал фильтра скользящего среднего с большим временем отклика 814 «наклон ЭВСС» подается на (+) вход суммирующего устройства 828, а выходной сигнал фильтра с малым временем отклика 816 «скользящее среднее» подается на (-) вход суммирующего устройства 828. Суммирующее устройство 828 подсчитывает разницу между выходными сигналами фильтра скользящего среднего с большим временем отклика 814 и фильтра с малым временем отклика 816. Разница между этими выходными сигналами сравнивается на этапе 830 с заданным предельным значением 832. Предельное значение 832 определяется в зависимости от вида ультразвукового инструмента и уровня мощности, при которой работает конкретный вид ультразвукового инструмента. Величина предельного значения 832 может быть установлена и сохранена в памяти в виде справочной таблицы и т.д. Если разница между «наклоном ЭВСС» и «наклоном средним» не превышает предельное значение 832, процессор 400 переходит по ветке «Нет» и возвращает величину 834 в блок результатов 710, что свидетельствует о том, что в дискретизированном частотном сигнале не было найдено точки перегиба и, соответственно, не было обнаружено изменений в состоянии ткани. Если же разница между «наклоном ЭВСС» и «наклоном средним» превышает предельное значение 832, процессор 400 переходит по ветке «Да» и определяет, что была обнаружена точка перегиба частоты 836, возвращает координаты точки 838 на блок результатов 710, что свидетельствует о том, что в дискретизированных данных о частоте была найдена точка перегиба кривой и, соответственно, было обнаружено изменение в состоянии ткани. Как уже говорилось выше в отношении ФИГ. 15A, если точка перегиба кривой частоты 836 найдена, тогда, на этапе 718 (ФИГ. 15A) процессор 400 активирует индикатор изменения в состоянии ткани 718.
На ФИГ. 15C представлена логическая схема 900, отражающая вариант работы модуля анализа перепада напряжения. На этапе 902 процессор 400 получает дискретизированный сигнал напряжения от блока 708 логической схемы 700. На этапе 904 процессор 400 рассчитывает экспоненциально взвешенное скользящее среднее (ЭВСС) для анализа точки падения напряжения. ЭВСС рассчитывается для фильтрации шума генератора, идущего от дискретных значений напряжения. ЭВСС рассчитывается в соответствии с уравнением скользящего среднего напряжения 906 и альфа-фактора (α) 908:
Stv=αYtv+(1-α)Stv-1 (5),
где:
Stv = текущее скользящее среднее дискретизированного сигнала напряжения;
Stv-1 = предыдущее скользящее среднее дискретизированного сигнала напряжения;
α = коэффициент сглаживания; и
Ytv = текущий замер дискретизированного сигнала напряжения.
Как уже говорилось выше, значение α 908 может варьироваться от 0 до 1 в зависимости от желаемого коэффициента фильтрации или сглаживания и может выбираться в зависимости от вида ультразвукового инструмента и уровня мощности. В одном из вариантов, блоки 904, 906 и 908 могут выполняться как переменный цифровой низкочастотный фильтр 910, где значение α 908 определяет точку отсечки фильтра 910. Как только дискретные значения напряжения отфильтрованы, рассчитывается наклон дискретных значений напряжения на этапе 912 следующим образом:
Наклон напряжения = дельтаv/дельтаt (6)
Расчеты замеров наклона напряжения передаются на фильтр скользящего среднего с большим временем отклика 914 для расчета скользящего среднего ЭВСС для наклона напряжения в целях дальнейшего снижения шума в системе. В одном из вариантов, фильтр скользящего среднего с большим временем отклика 914 может быть реализован путем расчета ЭВСС для наклона напряжения на этапе 918 в соответствии с уравнением скользящего среднего наклона напряжения 920 и альфа-фактором (α') 822:
S'tv=α'Y'tv+(1-α')S'tv-1 (7),
где:
S'tv = текущее скользящее среднее наклона напряжения дискретизированного сигнала напряжения;
S'tv-1 = предыдущее скользящее среднее наклона напряжения дискретизированного сигнала напряжения;
α' = коэффициент сглаживания; и
Y'tv = текущий замер наклона дискретизированного сигнала напряжения.
Значение α' 922 варьируется примерно от 0 до 1, как говорилось ранее в отношении блока цифрового фильтра 910 в соответствии с выбранным коэффициентом фильтрации или сглаживания, где малое значение α' 922, приближающееся к 0, приводит к значительной фильтрации или сглаживанию, а большое значение α' 922, приближающееся к 1, приводит к незначительной фильтрации или сглаживанию. Значение α' 922 может выбираться в зависимости от вида хирургического инструмента и уровня мощности.
Замеры рассчитанного наклона напряжения передаются на фильтр быстрого отклика 916 для расчета скользящего среднего наклона напряжения. На этапе 924 фильтр быстрого отклика 916 рассчитывает скользящее среднее Частоты напряжения на основании ряда замеров 926.
В проиллюстрированном варианте выходной сигнал фильтра скользящего среднего с большим временем отклика 914 «наклон ЭВСС» подается на (+) вход суммирующего устройства 928, а выходной сигнал фильтра с малым временем отклика 916 «наклон средний» подается на (-) вход суммирующего устройства 928. Суммирующее устройство 928 подсчитывает разницу между выходными сигналами фильтра скользящего среднего с большим временем отклика 914 и фильтра с малым временем отклика 916. Разница между этими выходными сигналами сравнивается на этапе 930 с заданным предельным значением 932. Предельное значение 932 определяется в зависимости от вида ультразвукового инструмента и уровня мощности, при которой работает конкретный вид ультразвукового инструмента. Величина предельного значения 932 может быть установлена и сохранена в памяти в виде справочной таблицы и т.д. Если разница между «наклон ЭВСС» и «наклон средний» не превышает предельного значения 932, процессор 400 переходит по ветке «Нет» и обнуляет счетчик на этапе 940, затем возвращает значение 934 на блок результатов 710, что свидетельствует о том, что точки перепада напряжения в дискретизированном сигнале напряжения обнаружено не было и, соответственно, не было обнаружено изменений в состоянии ткани. Если же разница между «наклон ЭВСС» и «наклон средний» превышает предельное значение 932, процессор 400 переходит по ветке «Да» и увеличивает показания счетчика на этапе 942. На этапе 944 процессор 400 решает, превышает ли значение счетчика 1 или какой-либо другой заданный порог, например. Другими словами, процессор 400 учитывает по меньшей мере два замера в отношении точки перепада напряжения. Если значение счетчика не превышает порога (например, 1 в проиллюстрированном варианте), процессор 400 переходит по ветке «Нет» и возвращает значение 934 в блок результатов 710, что свидетельствует о том, что точки перепада напряжения в дискретизированных сигналах напряжения обнаружено не было и, соответственно, не было обнаружено изменений в состоянии ткани. Если значение счетчика превышает пороговое (например, 1 в проиллюстрированном варианте), процессор 400 переходит по ветке «Да» и определяет, что была обнаружена точка перепада напряжения 936, возвращает координаты точки 938 в блок результатов 712, что свидетельствует об обнаружении точки перепада напряжения в дискретизированных сигналах и, соответственно, об изменениях в состоянии ткани. Как уже говорилось выше в отношении ФИГ. 15A, если точка напряжения 836 найдена, тогда, на этапе 718 (ФИГ. 15A) процессор 400 активирует индикатор изменения в состоянии ткани 718.
На ФИГ. 16 изображен один из вариантов хирургической системы 1000, в состав которой входит генератор 1002 и различные хирургические инструменты 1004, 1006, подходящие для использования с ней. На ФИГ. 16A представлен чертеж ультразвукового хирургического инструмента 1004, изображенного на ФИГ. 16. Генератор 1002 может быть перенастроен для использования с хирургическими устройствами. В различных вариантах, генератор 1002 может перенастраиваться для использования с различными хирургическими устройствами различных видов, в том числе, например, ультразвуковым устройством 1004 и электрохирургическими или РЧ-хирургическими устройствами, такими как РЧ-устройство 1006. Несмотря на то, что в варианте на ФИГ. 16 генератор 1002 изображен отдельно от хирургических устройств 1004, 1006, в одном из вариантов, генератор 1002 может быть интегрирован в любое из хирургических устройств 1004, 1006, образуя единую хирургическую систему. Генератор 1002 включает в себя устройство ввода 1045, расположенное на передней панели консоли генератора 1002. Устройство ввода 1045 может включать в себя любое подходящее устройство, которое генерирует сигналы, подходящие для программирования работы генератора 1002.
На ФИГ. 17 представлена схема хирургической системы 1000, изображенной на ФИГ. 16. В различных вариантах, генератор 1002 может состоять из нескольких отдельных функциональных элементов, таких как модули и/или блоки. Различные функциональные элементы или модули могут быть выполнены с возможностью приведения в действие различных видов хирургических инструментов 1004, 1006. Например, модуль ультразвукового генератора 1008 может приводить в действие ультразвуковые устройства, такие как ультразвуковое устройство 1004. Модуль электрохирургии/РЧ-генератора 1010 может приводить в действие электрохиругическое устройство 1006. Например, модули 1008, 1010 соответственно могут генерировать соответствующие управляющие сигналы для приведения в действие хирургических устройств 1004, 1006. В различных вариантах, модуль ультразвукового генератора 1008 и/или модуль электрохирургии/РЧ-генератора 1010 могут быть интегрированы с генератором 1002. Один или более модулей 1008, 1010 могут выступать отдельными модулями схем, электрически соединенными с генератором 1002. (Модули 1008 и 1010 изображены пунктиром для иллюстрации этой опции.) В дополнение к этому, в некоторых вариантах, модуль электрохирургии/РЧ-генератора 1010 может быть интегрирован с модулем ультразвукового генератора 1008 или наоборот. В дополнение к этому, в некоторых вариантах, генератор 1002 может полностью отсутствовать, а модули 1008, 1010 могут выполняться процессором или иными аппаратными средствами в соответствующих инструментах 1004, 1006.
В соответствии с описанными вариантами, модуль ультразвукового генератора 1008 может производить управляющий сигнал или сигналы определенных напряжений, токов и частот, например, 55,500 циклов в секунду (Гц). Управляющий сигнал или сигналы могут отправляться на ультразвуковое устройство 1004 и особенно на датчик 1014, который может работать, например, в соответствии с приведенным выше описанием. Преобразователь 1014 и волновод, проходящий через вал 1015 (волновод не изображен на ФИГ. 16A) могут вместе образовывать ультразвуковую систему привода, приводящую в действие ультразвуковое лезвие 1017 концевого зажима1026. В одном из вариантов, генератор 1002 может быть выполнен с возможностью создания управляющего сигнала конкретных выходных сигналов напряжения, тока и/или частоты, которые могут изменяться ступенчато или иным образом с высоким разрешением, точностью и повторяемостью.
Генератор 1002 может быть активирован для передачи управляющего сигнала на датчик 1014 любым подходящим образом. Например, генератор 1002 может иметь ножной переключатель 1020, соединенный с генератором 1002 посредством кабеля ножного переключателя 1022. Врач может активировать датчик 1014, нажав на ножной переключатель 1020. Помимо ножного переключателя 1020 или вместо него в некоторых вариантах, ультразвукового устройства 1004 могут использоваться один или более переключателей, расположенных на рукоятке, при активации которых генератор 1002 может активировать датчик 1014. В одном из вариантов, например, один или более переключателей могут иметь пару кнопок 1036a, 1036b (ФИГ. 16A), например, для определения рабочего режима устройства 1004. Когда кнопка 1036a нажата, например, ультразвуковой генератор 1002 может передавать максимальный управляющий сигнал на датчик 1014, благодаря чему последний обеспечивает максимальный выход ультразвуковой энергии. Нажатие кнопки 1036b может привести к тому, что ультразвуковой генератор 1002 будет передавать управляющий сигнал, который может выбирать пользователь, на датчик 1014, в результате чего последний будет производить выходную ультразвуковую энергию ниже максимальной. Устройство 1004 дополнительно или альтернативно может иметь второй переключатель (отсутствует на рисунке), например, для указания расположения триггера закрытия захватов при работе браншей концевого зажима 1026. В дополнение к этому, в некоторых вариантах, ультразвуковой генератор 1002 может активироваться в зависимости от расположения триггера закрытия браншей, (например, когда врач нажимает на триггер закрытия браншей для их закрытия, может применяться ультразвуковая энергия).
В дополнение или альтернативно один или более переключателей могут иметь кнопку 1036c, при нажатии которой генератор 1002 производит импульсный выходной сигнал. Импульсы могут вырабатываться на любой подходящей частоте и с любой компоновкой, например. В определенных вариантах, уровень мощности импульсов может регулироваться при помощи кнопок 1036a, 1036b (максимальный, ниже максимального), например.
Следует понимать, что устройство 1004 может иметь любую комбинацию кнопок 1036a, 1036b, 1036c. Например, устройство 1004 может иметь только две такие кнопки: кнопку 1036a для создания максимального выхода ультразвуковой энергии и кнопку 1036b для создания импульсного выходного сигнала либо при максимальном уровне мощности, либо при уровне мощности ниже максимального. Таким образом, конфигурация выходного управляющего сигнала генератора 1002 может быть следующей: 5 непрерывных сигналов и 5 или 4 или 3 или 2 или 1 импульсный сигнал. В определенных вариантах, конкретная конфигурация управляющего сигнала может управляться при помощи, например, настроек электронно стираемой программируемой постоянной памяти EEPROM генератора 1002 и/или выбора уровня мощности пользователем.
В определенных вариантах, вместо кнопки 1036c может использоваться двухпозиционный переключатель. Например, устройство 1004 может иметь кнопку 1036a для генерирования непрерывного выходного сигнала при максимальном уровне мощности и двухпозиционную кнопку 1036b. В первом фиксированном положении кнопка 1036b может производить непрерывный выходной сигнал при уровне мощности ниже максимального, а во втором фиксированном положении кнопка 1036b может производить импульсный выходной сигнал (например, либо при максимальном уровне мощности, либо при уровне мощности ниже максимального, в зависимости от настроек электронно стираемой программируемой постоянной памяти EEPROM).
В соответствии с описанными вариантами, модуль электрохирургии/РЧ-генератора 1010 может генерировать управляющий сигнал или сигналы с выходной мощностью, достаточной для выполнения биполярных электрохирургических процедур с использованием радиочастотной (РЧ) энергии. При применении в биполярной электрохирургии управляющий сигнал может передаваться, например, на электроды электрохирургического устройства 1006, например. Таким образом, генератор 1002 может использоваться в терапевтических целях путем применения электрической энергии к ткани, достаточной для воздействия на ткань (например, коагуляции, прижигания, сварки ткани).
Генератор 1002 может иметь устройство ввода 1045 (ФИГ. 16), расположенное, например, на передней панели консоли генератора 1002. Устройство ввода 1045 может включать в себя любое подходящее устройство, которое генерирует сигналы, подходящие для программирования работы генератора 1002. Во время работы пользователь может программировать или иным способом управлять работой генератора 1002 с использованием устройства ввода 1045. Устройство ввода 1045 может иметь любое подходящее устройство, генерирующее сигналы, которые могут использоваться генератором (например, один или более процессоров, имеющихся в генераторе) для управления работой генератора 1002 (например, работой модуля ультразвукового генератора 1008 и/или модуля электрохирургии/РЧ-генератора 1010). В различных вариантах, устройство ввода 1045 включает в себя одну или более кнопок, переключателей, дисковых регуляторов, клавиатуру, вспомогательную клавиатуру, сенсорный экран, позиционирующее устройство, удаленное соединение с общим или выделенным компьютером. В других вариантах, устройство ввода 1045 может иметь подходящий пользовательский интерфейс, например, один или более экранов пользовательских интерфейсов, отображенных на сенсорном экране, например. Таким образом, посредством устройства ввода 1045 пользователь может устанавливать или программировать различные рабочие параметры генератора, такие как, например, ток (I), напряжение (V), частота (f) и/или период (T) управляющего сигнала или сигналов, генерируемых модулем ультразвукового генератора 1008 и/или модулем электрохирургии/РЧ-генератора 1010.
Генератор 1002 может также иметь устройство вывода 1047 (ФИГ. 16), такое как выходной индикатор, расположенный, например, на передней панели консоли генератора 1002. Устройство вывода 1047 включает в себя одно или более устройств обеспечения сенсорной обратной связи для пользователя. Такие устройства могут иметь, например, устройства визуальной обратной связи (например, устройство визуальной обратной связи может иметь лампы накаливания, светоизлучающие диоды (LED), графический пользовательский интерфейс, дисплей, аналоговый индикатор, цифровой индикатор, гистограммный дисплей, цифровой буквенно-числовой дисплей, ЖК-экран, светодиодные индикаторы), звуковые устройства обратной связи (например, устройство звуковой обратной связи может иметь динамик, зуммер, аудиосигнал, электронный тоновый сигнал, машинную речь, голосовой пользовательский интерфейс (VUI), служащий для взаимодействия с компьютерами посредством звуковой/речевой платформы) или устройства тактильной обратной связи (например, устройство тактильной обратной связи, обеспечивающее любой вид вибрационной обратной связи, осязательный датчик).
Несмотря на то, что конкретные модули и/или блоки генератора 1002 могут быть описаны в качестве примера, надо понимать, что может использоваться большее или меньшее число модулей и/или блоков, которые также составляют неотъемлемую часть данных вариантов. В дополнение к этому, несмотря на то, что различные варианты могут быть описаны с точки зрения модулей и/или блоков для упрощения описания, такие модули и/или блоки могут быть реализованы в виде одного или более компонентов аппаратного обеспечения, например, процессоров, цифровых сигнальных процессоров (ЦСП), программируемых логических устройств (ПЛУ), специализированных интегральных микросхем (СИМ), схем, регистрирующих устройств и/или программных компонентов, например, программ, подпрограмм, логических схем и/или комбинаций аппаратных и программных компонентов. В дополнение к этому, в некоторых вариантах, различные модули, описанные в настоящем документе, могут реализовываться с использованием подобных аппаратных средств, находящихся в инструментах 100, 120, 1004, 1006 (т.е. генератор 30, 50, 1002 может отсутствовать).
В одном из вариантов, модуль привода ультразвукового генератора 1008 и модуль электрохирургии/РЧ-привода 1010 может иметь одно или более встроенных приложений, реализованных в форме встроенной программы, ПО, аппаратных средств или любой их комбинации. Модули 1008, 1010 могут включать в себя различные исполняемые модули, такие как ПО, программы, данные, драйвера, интерфейсы прикладных программ (ИПП) и т.д. Программы ПЗУ могут храниться в энергонезависимой памяти (ЭП), например в побитово маскированной постоянной памяти (ROM) или флеш-памяти. В различных вариантах, исполнения хранение программ ПЗУ в постоянной памяти ROM может сохранить флеш-память. ЭП может включать в себя другие типы памяти, в том числе, например, программируемую постоянную память ROM (PROM), стираемую программируемую постоянную память ROM (EPROM), электронно перепрограммируемую постоянную память ROM (EEPROM) или оперативную память с резервным аккумуляторным питанием (RAM), например динамическую оперативную память (DRAM), динамическую оперативную память с удвоенной скоростью передачи данных (DDRAM) и/или синхронную оперативную память DRAM (SDRAM).
В одном из вариантов, модули 1008, 1010 имеют аппаратный компонент, реализованный в форме процессора, для выполнения программных инструкций по отслеживанию различных измеряемых характеристик устройств 1004, 1006 и генерирования соответствующих сигналов выходных устройств для работы устройств 1004, 1006. В вариантах, в которых генератор 1002 используется вместе с устройством 1004, сигнал выходного устройства может приводить в действие ультразвуковой датчик 1014 в рабочих режимах разрезания и/или коагуляции. Электрические характеристики устройства 1004 и/или ткани могут быть измерены и использованы для управления рабочими аспектами генератора 1002 и/или предоставлены пользователю в виде обратной связи. В вариантах, в которых генератор 1002 используется вместе с устройством 1006, сигнал выходного устройства может передавать электрическую энергию (например, РЧ-энергию) концевому зажиму 1032 в режимах разрезания, коагуляции и/или обезвоживания. Электрические характеристики устройства 1006 и/или ткани могут быть измерены и использованы для управления рабочими аспектами генератора 1002 и/или предоставления пользователю обратной связи. В различных вариантах, как обсуждалось ранее, аппаратные компоненты могут выступать в виде процессора ЦОС, ПЛУ, СИМ, схем и/или регистрирующих устройств. В одном из вариантов, процессор может выполнять такие функции, как хранение и выполнение инструкций компьютерных программ для генерирования выходных сигналов ступенчатой функции, служащих для приведения в действие различных компонентов устройств 1004, 1006, таких, как ультразвуковой датчик 1014 и концевые зажимы 1026, 1032.
На ФИГ. 18 изображена эквивалентная схема 1050 ультразвукового датчика, такого как ультразвуковой датчик 1014, в соответствии с одним из вариантов. Схема 1050 включает в себя первую «динамическую» ветку, в которой последовательно соединены катушка самоиндукции Ls, сопротивление Rs и конденсатор Cs, которые определяют электромеханические характеристики резонатора, и вторую емкостную ветку, имеющую статическую емкость Co. Управляющий ток Ig может идти от генератора при управляющем напряжении Vg, где динамический ток Im идет через первую ветвь, а ток Ig-Im идет через емкостную ветвь. Управление электромеханическими характеристиками ультразвукового датчика может осуществляться путем соответствующего управления Ig и Vg. Как объяснялось выше, обычные архитектуры генераторов могут иметь регулируемый индуктор Lt (изображенную пунктиром на ФИГ. 18) для отключения в параллельной резонансной цепи статической емкости Co при резонансной частоте так, чтобы практически весь выходной ток Ig генератора шел по динамической ветви. Таким образом, управление током динамической ветви Im достигается путем управления выходным током генератора Ig. Регулируемый индуктор Lt предназначен именно для статической емкости Co ультразвукового датчика, и для другого ультразвукового датчика с другой статической емкостью потребуется другой регулируемый индуктор Lt. В дополнение к этому, поскольку регулируемый индуктор Lt подобран к номинальной величине статической емкости Co при единой резонансной частоте, точное управление током динамической ветви Im достигается только при такой частоте, а когда частота уменьшается вместе с температурой датчика, точное управление током динамической ветки затрудняется.
В вариантах генератора 1002, регулируемый индуктор Lt для отслеживания тока динамической ветви Im не используется. Вместо этого генератор 1002 может использовать измеренное значение статической емкости Co между сеансами подачи питания для конкретного ультразвукового хирургического устройства 1004 (наряду с управляющим сигналом напряжения и текущими данными обратной связи) для определения значений тока динамической ветви Im на динамической и постоянной основе (например, в реальном времени). Такие варианты генератора 1002, поэтому, способны обеспечивать виртуальную настройку для симуляции системы, которая настраивается или настроена в резонанс с любой величиной статической емкости Co при любой частоте, а не просто на единой резонансной частоте, определяемой номинальным значением статической емкости Co.
На ФИГ. 19 изображена упрощенная блок-схема одного из вариантов генератора 1002, подтверждающая возможность настройки без участия регулируемого индуктора, как описано выше, среди прочих преимуществ. Дополнительные сведения о генераторе 1002 представлены в принадлежащей этому же правообладателю и одновременно поданной заявке на патент США под серийным номером 12/896 360, озаглавленной «Хирургический генератор для ультразвуковых и электрохирургических устройств», номер дела патентного поверенного END6673USNP/100558, информация о которой является частью настоящего документа по ссылке во всей полноте. Как изображено на ФИГ. 19, генератор 1002 может иметь изолированную от пациента группу переключателя 1052, сообщающуюся с неизолированной группой 1054 посредством силового трансформатора 1056. Вторичная обмотка 1058 силового трансформатора 1056 находится в изолированной группе 1052 и может иметь отводы (например, конфигурацию с центральными или нецентральными отводами) для определения выходных управляющих сигналов 1060a, 1060b, 1060c для передачи управляющих сигналов различным хирургическим устройствам, таким как, например, ультразвуковое хирургическое устройство 1004 и электрохирургическое устройство 1006. В частности, выходы управляющего сигнала 1060a, 1060c могут передавать ультразвуковой управляющий сигнал (например, 420-вольтный среднеквадратичный управляющий сигнал) ультразвуковому хирургическому устройству 1004, а выходы управляющего сигнала 1060b, 1060c могут передавать электрохирургический управляющий сигнал (например, 100-вольтный среднеквадратичный управляющий сигнал) электрохирургическому устройству 1006, при этом выход 1060b соответствует центральному отводу силового трансформатора 1056.
В определенных устройствах ультразвуковой и электрохирургический управляющий сигналы могут передаваться одновременно отдельным хирургическим инструментам и/или одному хирургическому инструменту, который может передавать ткани и ультразвуковую, и электрохирургическую энергию. Пример лезвия 79 и блока зажимного рычага 415 одного из описанных в примере вариантов такого хирургического инструмента представлен на ФИГ. 13. Следует понимать, что электрохирургический сигнал, передаваемый непосредственно электрохирургическому инструменту и/или комбинированному ультразвуковому/электрохирургическому инструменту, может быть либо терапевтическим, либо субтерапевтическим уровневым сигналом.
Неизолированная группа 1054 может иметь усилитель мощности 1062 с выходом, соединенным с первичной обмоткой 1064 силового трансформатора1056. В определенных вариантах, усилитель мощности 1062 может иметь двухтактный усилитель. Например, неизолированная группа 1054 может также иметь логический блок 1066 для передачи цифрового выходного сигнала на конвертер цифрового сигнала в аналоговый (КЦСА) 1068, который в свою очередь передает соответствующий аналоговый сигнал на вход усилителя мощности 1062. В определенных вариантах, логический блок 1066 может иметь программируемую логическую матрицу (ПЛМ), программируемую пользователем логическую матрицу (ППЛМ), программируемое логическое устройство и другие логические схемы. Логический блок 1066, управляя входным сигналом усилителя мощности 1062 посредством КЦСА 1068, может таким образом управлять любым из набора параметров (например, частоту, форму кривой, амплитуду кривой) управляющих сигналов, появляющихся на выходах управляющего сигнала 1060a, 1060b, 1060c. В определенных вариантах, о чем будет рассказано далее, логический блок 1066 вместе с процессором (например, процессором цифрового сигнала, описанным ниже), могут выполнять ряд алгоритмов, основанных на цифровой обработке сигнала (ЦОС) и/или других алгоритмов управления для управления параметрами выходных управляющих сигналов генератора 1002.
Питание может подаваться на шину электропитания усилителя мощности 1062 с помощью переключающего регулятора 1070. В определенных вариантах, переключающий регулятор 1070 может иметь настраиваемый импульсный регулятор, например. Неизолированная группа 1054 может также включать в себя первый процессор 1074, который в одном из вариантов, может иметь процессор ЦОС, такой как, например, Analog Devices ADSP-21469 SHARC производства компании Analog Devices, Норвуд, Массачусетс. Однако в различных вариантах, может использоваться любой подходящий процессор. В определенных вариантах, процессор 1074 может управлять работой переключающего силового датчика 1070 в зависимости от данных обратной связи по напряжению, полученных от усилителя мощности 1062 процессором ЦОС 1074 с помощью конвертера аналогового сигнала в цифровой (КАСЦ) 1076. В одном из вариантов, например, процессор ЦОС 1074 может получать в качестве входящего сигнала с помощью КАСЦ 1076 огибающую сигнала (например, РЧ-сигнала), усиливаемую усилителем мощности 1062. Процессор ЦОС 1074 может затем управлять переключаемым регулятором 1070 (например, через широтно-импульсно модулированный (ШИМ) выход), так, чтобы напряжение питания, подаваемое на усилитель мощности 1062 отслеживало огибающую усиленного сигнала. Динамическое модулирование напряжения питания усилителя мощности 1062 на основе огибающей сигнала значительно повышает эффективность усилителя мощности 1062 по сравнению со схемами фиксированного напряжения питания усилителя.
В определенных вариантах, логический блок 1066 вместе с процессором ЦОС 1074 может реализовывать схему управления цифровым генератором прямого синтеза (ЦГПС) для управления формой кривой, частотой и/или амплитудой выходных управляющих сигналов генератором 1002. В одном из вариантов, например, логический блок 1066 может выполнять алгоритм управления ЦГПС путем выборки из памяти примеров кривой, записанных в динамически обновляемой справочной таблице, такой как справочная таблица оперативной памяти, которая может быть встроена в ППЛМ. Этот алгоритм управления особенно полезен при использовании ультразвука, когда ультразвуковой датчик, такой как ультразвуковой датчик 1014, может приводиться в действие при помощи чистого синусоидального тока на своей резонансной частоте. Поскольку другие частоты могут вызывать паразитные резонансы, минимизация или уменьшение общего искажения тока динамической ветви может, соответственно, минимизировать или уменьшать нежелательные резонансные эффекты. Поскольку форма кривой выходного управляющего сигнала генератора 1002 зависит от различных источников искажения, присутствующих в цепи выходного управляющего сигнала (например, силового трансформатора 1056, усилителя мощности 1062), данные обратной связи по напряжению и току, привязанные к управляющему сигналу, могут быть введены в алгоритм, такой как алгоритм контроля ошибок, выполняемый процессором ЦОС 1074, который компенсирует искажение путем предыскажения или модифицирования выборки кривых, хранящейся в справочной таблице на динамической постоянной основе (например, в реальном времени). В одном из вариантов, объем или степень предыскажения, применимая к выборкам из справочной таблицы может быть привязана к ошибке между расчетным током динамической ветви и предпочитаемой формой кривой тока, где ошибка определяется путем сравнения выборок. Таким образом, предыскаженные выборки из справочной таблицы при обработке в управляющей схеме могут привести к тому, что управляющий сигнал динамической ветви будет иметь желаемую форму кривой (например, синусоидальную) для оптимального запуска ультразвукового датчика. В таких вариантах, выборки кривых из справочной таблицы, соответственно, отражают не желаемую форму кривой управляющего сигнала, а скорее форму кривой, требующуюся для генерирования желаемой формы кривой управляющего сигнала динамической ветви, когда во внимание принимаются эффекты искажения.
Неизолированная группа 1054 может также иметь КАСЦ 1078 и КАСЦ 1080, соединенные с выходом силового трансформатора 1056 через соответствующие изолирующие трансформаторы 1082, 1084 для дискретизирования соответствующих выходных управляющих сигналов напряжения и тока генератора 1002. В определенных вариантах, КАСЦ 1078, 1080 могут быть настроены для дискретизации на высоких скоростях (например, 80 млн выборок в секунду) для обеспечения возможности сверхдискретизации управляющих сигналов. В одном из вариантов, например, скорость дискретизации КАСЦ 1078, 1080 может позволять сверхдискретизацию управляющих сигналов на скорости приблизительно 200x (в зависимости от частоты). В определенных формах операции сверхдискретизации КАСЦ 1078, 1080 могут выполняться одним КАСЦ, принимающим входные сигналы напряжения и тока через двухканальный мультиплексор. Благодаря использованию высокоскоростной сверхдискретизации в вариантах, генератора 1002, помимо прочего, можно рассчитывать комплексный ток, идущий по динамической ветви (который может использоваться в определенных вариантах, для реализации управления формой кривой с помощью ЦГПС, как описано выше), осуществлять точное цифровое фильтрование дискретизированных сигналов и расчет реального потребления мощности с высокой степенью точности. Данные обратной связи по напряжению и току, выдаваемые КАСЦ 1078, 1080 могут приниматься и обрабатываться (например, FIFO-буферизация, мультиплексирование) логическим блоком 1066 и храниться в памяти данных для последующего обращения за ними, например, процессора ЦОС 1074. Как говорилось ранее, данные обратной связи по напряжению и току могут использоваться как вводные данные для алгоритма предыскажения или изменения выборки кривых из справочной таблицы на динамической и постоянной основе. В определенных вариантах, это может потребовать индексирования каждой пары сохраненных данных обратной связи по напряжению и току на основании или в какой-либо иной связи с соответствующей выборкой справочной таблицы, которая была выдана логическим блоком 1066, когда была получена пара данных обратной связи по напряжению и току. Синхронизация выборок справочной таблицы и данных обратной связи по напряжению и току таким образом способствует корректному времени выполнения и устойчивости алгоритма предыскажения.
В определенных вариантах, данные обратной связи по напряжению и току могут использоваться для управления частотой и/или амплитудой (например, амплитудой тока) управляющих сигналов. В одном из вариантов, например, данные обратной связи по напряжению и току могут использоваться для определения фазы сопротивления. Частота управляющего сигнала может затем контролироваться для минимизации или уменьшения разницы между определенной фазой сопротивления и заданной величиной фазы сопротивления (например, 0°), таким образом минимизируя или уменьшая эффекты гармонического искажения и, соответственно, повышая точность измерения фазы сопротивления. Определение фазы сопротивления и сигнал управления частотой могут реализовываться в процессоре ЦОС 1074, например, где сигнал управления частотой вводится как входные данные в алгоритм управления ЦГПС, выполняемый логическим блоком 1066.
В другом варианте, например, данные обратной связи по току могут отслеживаться с целью поддержания токовой амплитуды управляющего сигнала на заданном значении амплитуды тока. Заданная величина амплитуды тока может быть указана прямо или определена косвенно на основании указанных заданных значений амплитуды напряжения и мощности. В определенных вариантах, управление амплитудой тока может реализовываться с помощью алгоритма управления, такого как, например, ПИД-алгоритма управления в процессоре 1074. Переменные, контролируемые алгоритмом управления для управления амплитудой тока управляющего сигнала, могут включать в себя, например, шкалирование выборок кривых справочной таблицы, хранящихся в логическом блоке 1066 и/или полномасштабное выходное напряжение КЦСА 1068 (который передает входной сигнал на усилитель мощности 1062) через КЦСА 1086.
Неизолированная группа 1054 может также иметь второй процессор 1090 для обеспечения, помимо прочего, функционала пользовательского интерфейса (ПИ). В одном из вариантов, процессором ПИ 1090 может выступать процессор Atmel AT91SAM9263 с ядром ARM 926EJ-S производства компании Atmel Corporation, Сан-Хосе, штат Калифорния. В качестве примеров функционала ПИ, поддерживаемого процессором ПИ 1090, могут служить звуковая и визуальная обратная связь, обмен данными с периферийными устройствами (например, через интерфейс универсальной последовательной шины (USB)), обмен данными с ножным переключателем 1020, обмен данными с устройством ввода 1009 (например, сенсорным экраном) и обмен данными с устройством вывода 1047 (например, динамиком). Процессор ПИ 1090 может обмениваться данными с процессором 1074 и логическим блоком 1066 (например, через шины последовательного периферийного интерфейса (SPI)). Хотя процессор ПИ 1090 может главным образом поддерживать функционал ПИ, он также может координировать действия с процессором ЦОС 1074 для снижения степени риска в определенных вариантах. Например, процессор ПИ 1090 может быть запрограммирован для отслеживания различных аспектов пользовательского ввода данных и/или ввода других данных (например, ввода данных с сенсорного экрана, ввода данных с ножного переключателя 1020 (ФИГ. 17), ввода данных датчика температуры) и может блокировать управляющий выходной сигнал генератора 1002 при обнаружении ошибочного условия.
В определенных вариантах, и процессор ЦОС 1074, и процессор ПИ 1090, например, могут определять и отслеживать рабочее состояние генератора 1002. Для процессора ЦОС 1074 рабочее состояние генератора 1002 может позволить определить, например, какие процессы управления и/или диагностики выполняются процессором ЦОС 1074. Для процессора ЦОС 1090 рабочее состояние генератора 1002 может определять, например, какие элементы пользовательского интерфейса (например, экраны дисплея, звуки) предлагаются пользователю. Соответствующие процессоры ЦОС и ПИ 1074, 1090 могут независимо поддерживать текущее рабочее состояние генератора 1002 и распознавать и оценивать возможные выходы из текущего рабочего состояния. Процессор ЦОС 1074 может выступать в данных отношениях мастером и определять, когда должны происходить переходы между рабочими состояниями. Процессор ПИ 1090 может иметь данные о допустимых переходах между рабочими состояниями и может подтверждать, допустим ли конкретный переход. Например, когда процессор ЦОС 1074 отправляет процессору ПИ 1090 команду перейти в конкретное состояние, процессор ПИ 1090 может провести верификацию запрошенного перехода. В случае, если запрошенный переход между состояниями определен процессором ПИ 1090 как недопустимый, процессор ПИ 1090 может вызвать вхождение генератора 1002 в режим отказа.
Неизолированная группа 1054 может также иметь контроллер 1096 для мониторинга устройств ввода 1045 (например, тактильный емкостный сенсор для включения и выключения генератора 1002, емкостный сенсорный экран). В определенных вариантах, контроллер 1096 может иметь по меньшей мере один процессор и/или другое контроллерное устройство, связанное с процессором ПИ 1090. В одном из вариантов, например, контроллер 1096 может иметь процессор (например, 8-битный контроллер Mega168 производства Atmel), предназначенный для отслеживания пользовательского ввода данных через один или более емкостных тактильных сенсоров. В одном из вариантов, контроллер 1096 может иметь контроллер сенсорного экрана (например, контроллер сенсорного экрана QT5480 производства Atmel) для контроля и управления получением данных, введенных при помощи емкостного сенсорного экрана.
В определенных вариантах, когда генератор 1002 находится в состоянии «питание отключено», контроллер 1096 может продолжать принимать рабочее питание (например, по каналу от источника питания генератора 1002, такого как источник питания 2011, о котором говорится ниже). Таким образом, контроллер 196 может продолжать отслеживание устройства ввода 1045 (например, емкостного тактильного сенсора, расположенный на передней панели генератора 1002) для включения и выключения генератора 1002. Когда генератор 1002 находится в состоянии отключенного питания, контроллер 1096 может «разбудить» источник питания (например, инициировать работу одного или более датчиков напряжения постоянного тока 2013 источника питания 2011), если обнаружена активация устройства ввода «вкл./выкл.» 1045 пользователем. Контроллер 1096 может таким образом инициировать процесс перевода генератора 1002 в состояние «питание включено». С другой стороны, контроллер 1096 может инициировать последовательность для перевода генератора 1002 в состояние отключенного питания, если активация устройства ввода «вкл./выкл.» 1045 обнаружена, когда генератор 1002 находится в состоянии включенного питания. В определенных вариантах, например, контроллер 1096 может сообщать о об активации устройства ввода «вкл./выкл.» 1045 процессору 1090, который в свою очередь осуществляет необходимый процесс перевода генератора 1002 в состояние отключенного питания. В таких вариантах, контроллер 196 может не иметь возможности независимого отключения питания от генератора 1002 после его перевода в состояние включенного питания.
В определенных вариантах, контроллер 1096 может дать команду генератору 1002 выдать звуковую или иную сенсорную обратную связь для оповещения пользователя о том, что была инициирован процесс включения или отключения питания. Такое оповещение может осуществляться в начале программы включения или выключения питания и до начала других процессов, связанных с этой программой.
В определенных вариантах, изолированная группа 1052 может включать в себя схему интерфейса для взаимодействия с приборами 1098, например, для обеспечения интерфейса связи между управляющей схемой хирургического устройства (например, управляющей схемой переключателей рукоятки) и компонентами неизолированной группы 1054, такими как, например, программируемое логическое устройство 1066, процессор ЦОС 1074 и/или процессор ПИ 190. Схема интерфейса для взаимодействия с приборами 1098 может обмениваться информацией с компонентами неизолированной группы 1054 по каналу связи, который поддерживает электрическую изоляцию нужной степени между группами 1052, 1054, такому как, например, инфракрасный (ИК) канал связи. Питание может подаваться на схему интерфейса для взаимодействия с приборами 1098 с использованием, например, регулятора малого падения напряжения, работающего от изолирующего трансформатора, приводимого в действие неизолированной группой 1054.
В одном из вариантов, схема интерфейса для взаимодействия с приборами 198 может иметь логический блок 2000 (например, логическую схему, программируемую логическую схему, ПЛМ, ППЛМ, программируемое логическое устройство), связанный со схемой преобразования сигнала 2002. Схема преобразования сигнала 2002 может быть выполнена с возможностью получения периодического сигнала от логической схемы 2000 (например, 2-килогерцовой прямоугольной волны) для генерирования биполярного сигнала запроса с идентичной частотой. Сигнал запроса может генерироваться, например, при помощи биполярного источника тока, питающегося от дифференциального усилителя. Сигнал запроса может передаваться на управляющую схему хирургического устройства (например, при помощи проводящей пары в кабеле, который соединяет генератор 102 с хирургическим инструментом) и отслеживаться для определения состояния или конфигурации управляющей схемы. Управляющая схема может иметь ряд переключателей, резисторов и/или диодов для изменения одной или более характеристик (например, амплитуды, выпрямления) сигнала запроса так, чтобы состояние или конфигурация управляющей схемы являлось однозначно распознаваемым на основе одной или более характеристик. В одном из вариантов, например, схема преобразования сигнала 2002 может иметь КАСЦ, служащий для генерирования дискретизированных значений сигнала напряжения, появляющегося во входах управляющей схемы при проходе сигнала запроса через нее. Логический блок 2000 (или компонент неизолированной группы 1054) может затем определять состояние или конфигурацию управляющей схемы на основе выборок КАСЦ.
В одном из вариантов, схема интерфейса для взаимодействия приборов 1098 может иметь первый интерфейс линии передачи данных 2004 для осуществления обмена информацией между логической схемой 2000 (или другим элементом схемы интерфейса для взаимодействия приборов 1098) и первую линию передачи данных, расположенную внутри хирургического устройства или связанную с ним иным способом. В некоторых вариантах, например, первая линия передачи данных 2006 (ФИГ. 16А) может быть расположена в кабеле, неразъемно соединенном с рукояткой хирургического устройства или в адаптере для установления связи между конкретным типом или моделью хирургического устройства и генератором 1002. Линия передачи данных 2006 может быть реализована любым подходящим способом и может обмениваться данными с генератором по любому подходящему протоколу, в том числе, например, в соответствии с описанием к схеме 6006, приведенным в настоящем документе. В определенных вариантах, первая линия передачи данных может иметь энергонезависимое устройство хранения информации, такое как устройство электронно стираемой программируемой постоянной памяти (EEPROM). В определенных вариантах, возвращаясь снова к ФИГ. 19, интерфейс первой линии передачи данных 2004 может быть реализован отдельно от логического блока 2000 и иметь подходящий набор схем (например, устройства дискретной логики, процессор) для осуществления обмена данными между программируемым логическим устройством 2000 и первой линией передачи данных. В других вариантах, интерфейс первой линии передачи данных 2004 может быть встроен в логический блок 2000.
В определенных вариантах, первая линия передачи данных 2006 может хранить информацию, относящуюся к конкретному хирургическому устройству, с которым она связана. Такая информация может включать в себя, например, номер модели, серийный номер, число операций, в которых использовалось данное хирургическое устройство и/или любой другой вид информации. Эта информация может считываться схемой интерфейса для взаимодействия с приборами 1098 (например, логическим устройством 2000), передаваться компоненту неизолированной группы 1054 (например, логическому блоку 1066, процессору ЦОС 1074 и/или процессору ПИ 1090) для представления пользователю при помощи устройства вывода 1047 и/или для управления функцией или работой генератора 1002. В дополнение к этому, любой вид информации может передаваться первой линии передачи данных 2006 для хранения в ней при помощи интерфейса схемы первой линии передачи данных 2004 (например, с помощью логического блока 2000). Такая информация может включать в себя, например, актуальное количество операций, в которых использовалось хирургическое устройство и/или даты и/или время использования.
Как говорилось ранее, хирургический инструмент может иметь разъемное соединение с рукояткой (например, инструмент 1024 может иметь разъемное соединение с рукояткой 1014) для возможности взаимной замены инструментов и/или удаления составных частей. В таких случаях обычные генераторы могут иметь ограниченные возможности распознавания используемых конфигураций конкретного инструмента и оптимизации управления и процессов диагностики, соответственно. Однако оснащение хирургических инструментов считываемыми линиями передачи данных для решения этой проблемы представляется проблематичным с точки зрения совместимости. Например, создание хирургического устройства, совместимого с предыдущими версиями генераторов, не имеющих функционала считывания необходимых данных, может оказаться непрактичным в силу, например, отличий схем сигналов, сложности конструкции и стоимости. Варианты инструментов, описанные в настоящем документе, решают эти проблемы путем использования линий передачи данных, которые могут быть реализованы в существующих хирургических инструментах экономично и с минимальными изменениями в конструкции в целях сохранения совместимости хирургических устройств с современными платформами генераторов.
В дополнение к этому, варианты генератора 1002 могут поддерживать обмен данными с линиями передачи данных, размещенными в инструментах. Например, генератор 1002 может быть выполнен с возможностью обмена данными со второй линией передачи данных 2007, которая содержится в инструменте (например, инструменте 1024) хирургического устройства (ФИГ. 16A). В некоторых вариантах, вторая линия передачи данных 2007 может быть реализована в большом количестве вариантов, подобных линии передачи данных 6006, описанной в настоящем документе. Схема интерфейса для взаимодействия с приборами 1098 может включать в себя интерфейс второй линии передачи данных 2010 для осуществления этого обмена данными. В одном из вариантов, интерфейс второй линии передачи данных 2010 может включать в себя цифровой интерфейс с тремя состояниями. В то же время, могут использоваться и другие интерфейсы. В определенных вариантах, вторая линия передачи данных в общем смысле может представлять собой любую линию для передачи и/или получения данных. В одном из вариантов, например, вторая линия передачи данных может хранить информацию, относящуюся к конкретному хирургическому инструменту, с которым она связана. Такая информация может включать в себя, например, номер модели, серийный номер, число операций, в которых использовался данный хирургический инструмент, и/или любой другой вид информации. В некоторых вариантах, вторая линия передачи данных 2007 может хранить информацию об электрических и/или ультразвуковых свойствах сопряженного датчика 1014, концевого зажима 1026 или ультразвуковой системы привода. Например, первая линия передачи данных 2006 может выдавать сведения о наклоне частоты при приработке, как описано в настоящем документе. Кроме этого или вместо этого, любой вид информации может передаваться второй линии передачи данных для хранения в ней при помощи интерфейса второй линии передачи данных 2010 (например, с помощью логического блока 2000). Такая информация может включать в себя, например, актуальное количество операций, в которых использовался хирургический инструмент, и/или даты и/или время использования. В определенных вариантах, вторая линия передачи данных может передавать данные, полученные одним или более сенсорами (например, датчиком температуры, расположенном на инструменте). В определенных вариантах, вторая линия передачи данных может получать данные от генератора 1002 и предоставлять сведения пользователю (например, с помощью светодиодной индикации или другого вида визуальной индикации) на основе полученных данных.
В определенных вариантах, вторая линия передачи данных и интерфейс второй линии передачи данных 2010 могут иметь такую конфигурацию, при которой обмен данными между логическим блоком 2000 и второй линией передачи данных может осуществляться без необходимости в дополнительных проводниках для этой цели (например, выделенного проводника кабеля, соединяющего рукоятку с генератором 1002). В одном из вариантов, например, информация может идти к и от второй линии передачи данных с использованием схемы связи по однопроводной шине, реализованной на существующей кабельной сети, например, с помощью одного из проводников для передачи сигналов запроса от схемы преобразования сигнала 2002 управляющей схеме в рукоятке. Таким образом минимизируются или уменьшаются изменения или модификации в конструкции хирургического устройства, которые были бы необходимы в ином случае. В дополнение к этому, поскольку различные виды связи, реализуемые по обычному физическому каналу, могут иметь разные полосы частот, наличие второй линии передачи данных может быть «невидимо» для генераторов, не имеющих функционала считывания необходимых данных, и таким образом поддерживать совместимость с предыдущими версиями инструментов хирургического устройства.
В определенных вариантах, изолированная группа 1052 может иметь по меньшей мере один блокировочный конденсатор 2096-1, соединенный с выходом управляющего сигнала 1060b для предотвращения воздействия постоянного тока на пациента. Один блокировочный конденсатор может понадобиться для выполнения медицинских нормативов и требований, например. Отказ конструкций с одним конденсатором случается относительно редко, однако такой отказ может иметь отрицательные последствия. В одном из вариантов, может иметься второй блокировочный конденсатор 2096-2, последовательно соединенный с блокировочным конденсатором 2096-1, где утечка тока из точки между блокировочными конденсаторами 2096-1, 2096-2 отслеживается, например, КАСЦ 2098 для выборки дискретизированного напряжения, вызываемого током утечки. Дискретизированные значения могут передаваться логическому блоку 2000, например. На основе изменений в токе утечки (о чем свидетельствуют дискретизированные значения напряжения в варианте, изображенном на ФИГ. 19), генератор 1002 может определять отказ по меньшей мере одного из блокировочных конденсаторов 2096-1, 2096-2. Таким образом, вариант, изображенный на ФИГ. 19, имеет преимущество по сравнению с конструкцией, содержащей только один конденсатор, имеющий одну точку отказа.
В определенных вариантах, неизолированная группа 1054 может иметь источник питания 2011 для выдачи мощности постоянного тока при подходящем напряжении и токе. Источник питания может включать в себя, например, 400-ваттный источник питания для обеспечения системного напряжения в 48 вольт постоянного тока. Источник питания 2011 может также иметь один или более датчиков напряжения постоянного тока 2013 для получения выходного сигнала источника питания для генерирования сигналов постоянного тока при напряжении и силе тока, которые требуются для различных компонентов генератора 1002. Как говорилось выше в отношении контроллера 1096, один или более датчиков напряжения постоянного тока 2013 могут получать входной сигнал от контроллера 1096 при обнаружении контроллером 1096 активации устройства ввода «вкл./выкл.» 1045 пользователем для запуска или вывода из спящего режима 1096 датчиков напряжения постоянного тока 2013.
Подробное описание работы различных вариантов хирургической системы 19 (ФИГ. 1), 190 (ФИГ. 10), 1000 (ФИГ. 16) может сопровождаться дальнейшим общим описанием работы вышеупомянутых хирургических систем 19, 190, 1000 в аспекте процесса разрезания и коагуляции ткани с использованием хирургического инструмента, в состав которого входит устройство ввода 406, 1045 и генератора 1002. Несмотря на то, что здесь приводится описание конкретного процесса в разрезе операционных подробностей, следует понимать, что данный процесс является всего лишь примером того, как может реализовываться любой из хирургических систем 19, 190, 1000 общий функционал, описанный в настоящем документе. В дополнение к этому, данный процесс необязательно должен выполняться в порядке, приведенном в настоящем документе, если не указано иное. Как говорилось ранее, любое из устройств ввода 406, 1045 может использоваться для программирования выходного сигнала (например, сопротивления, тока, напряжения, частоты) хирургических устройств 100 (ФИГ. 1), 120 (ФИГ. 10), 1002 (ФИГ. 16), 1006 (ФИГ. 16).
На ФИГ. 20-22 представлены различные варианты логических схем 1200, 1300, 1400, связанных с алгоритмом ткани для обнаружения момента, когда происходит быстрое нагревание лезвия ультразвукового концевого зажима 1026, и предоставления возможности генерирования визуальной, звуковой и/или тактильной обратной связи и/или изменения рабочего режима инструмента и/или генератора. Например, обратная связь может предоставляться при помощи индикатора выходного сигнала 412 (ФИГ. 9, 11) и/или устройства вывода 1047 (ФИГ. 16) (например, световая сигнализация, модуляция выходной мощности и/или отображение содержания). В соответствии со сведениями, представленными в настоящем документе, когда используются несколько справочных номеров для описания элемента, например, «ультразвуковой хирургический инструмент 100, 120, 1004», следует понимать, что информация касается каждого из элементов: например, «ультразвуковой хирургический инструмент 100» или «ультразвуковой хирургический инструмент 120 или «ультразвуковой хирургический инструмент 1004». Также следует понимать, что любой из алгоритмов, описанных в настоящем документе, подходит для выполнения с любым из инструментов 100, 120, 1004, описанных в настоящем документе.
В различных вариантах, обратная связь может обеспечиваться при помощи индикатора выходного сигнала 412, показанного на ФИГ. 9 и 11, или устройства вывода 1047 на ФИГ. 16. Данные устройства вывода (например, индикатор выходного сигнала 412, устройство вывода 1047) особенно полезны при операциях, когда ткань, на которую производится воздействие при помощи концевого зажима 81 (ФИГ. 1), 810 (ФИГ. 10), 1026 (ФИГ. 16), находится вне поля зрения пользователя, и пользователь не имеет возможности видеть, когда в состоянии ткани происходит изменение. Устройство обратной связи сообщает пользователю об изменении, произошедшем в состоянии ткани, как определено в соответствии с операциями, описанными в отношении логических схем 700, 800, 900, 1200, 1300, 1400, в той части, в какой они имеют отношение к соответствующим алгоритмам ткани. Устройства обратной связи могут быть выполнены с возможностью обеспечения различных типов обратной связи в соответствии с текущим состоянием или условиями ткани. Изменение в состоянии ткани может определяться на основании характеристик датчика и/или ткани, связанных с результатами замера напряжения, тока и частоты в соответствии с описанными операциями, например, в отношении логических схем 700, 800, 900, описанных ранее касательно ФИГ. 15A-C и логических схем 1200, 1300, 1400, описанных далее касательно ФИГ. 20-22, а также различных иных логических схем, описанных в настоящем документе
В одном из вариантов, логические схемы 1200, 1300, 1400 могут быть реализованы как исполняемые модули (например, алгоритмы) включающие в себя машиночитаемые инструкции для выполнения процессором 400 (ФИГ. 9, 11, 14), расположенном в генераторе 30, 500 или генераторе 1002 (ФИГ. 16, 17, 19). В различных вариантах, операции, описанные в отношении логических схем 1200, 1300, 1400, могут выполняться как один или более компонентов ПО, например, программа, субпрограмма, логическая программа; один или более компонентов аппаратного обеспечения, например, процессор, процессор цифрового сигнала, ПЛУ, ПЛМ, ППЛМ, СИМ, схема, логическая схема, регистрирующее устройство; и/или комбинаций ПО и аппаратного обеспечения. В одном из вариантов, исполнимые инструкции для выполнения операций, описанных логическими схемами 1200, 1300, 1400, могут храниться в памяти. При выполнении инструкций процессор 400, процессор ЦОС 1074 (ФИГ. 19) или логический блок 1066 (ФИГ. 19) определяет изменение в состоянии ткани в соответствии с операциями, описанными в логических схемах 1200, 1300 и 1400, и обеспечивает обратную связь пользователю при помощи индикатора выходного сигнала 412 (ФИГ. 9, 11) или индикатора выходного сигнала 1047 (ФИГ. 16, 17). В соответствии с такими исполнимыми инструкциями процессор 400, процессор ЦОС 1074, и/или логический блок 1066 отслеживает и оценивает дискретные значения напряжения, тока и/или частоты, получаемые от генератора 30, 500, 1002 и в соответствии с оценкой таких дискретных значений сигнала определяет, произошло ли изменение в состоянии ткани. Как описано ниже, изменение в состоянии ткани может быть определено в зависимости от типа ультразвукового инструмента и уровня мощности, которую потребляет инструмент. После получения обратной связи рабочий режим любого из ультразвуковых хирургических инструментов 100, 120, 1004 может контролироваться пользователем, автоматически и полуавтоматически.
Краткое резюме алгоритма ткани, представленное при помощи логических схем 1200, 1300, 1400, теперь будет описано для ультразвуковых хирургических инструментов 100, 120, 1004, приводимых в действие соответствующим генератором 30 (ФИГ. 1), 500 (ФИГ. 10), 1002 (ФИГ. 17). В одной из разновидностей алгоритм ткани обнаруживает, когда температура лезвия (и, соответственно, резонанс) ультразвукового концевого зажима 81 (ФИГ. 1), 810 (ФИГ. 10), 1026 (ФИГ. 17) быстро меняется (наибольший интерес представляет увеличение). Для инструмента типа зажима или ножниц это изменение может соответствовать общему клиническому сценарию, наряду с остальными, когда к лезвию примыкает минимальный объем ткани либо ткань отсутствует вовсе, примыкает некротическая ткань или жидкость, а лезвие активировано и соприкасается с зажимным рычагом, зажимной пластиной или другим элементом, способствующим смещению ткани. В случае отсутствия зажимного действия, когда инструмент, оснащенный зажимным рычагом или подобными механизмами или не оснащенный таковыми, используется для воздействия на ткань, такое изменение соответствует условиям, при которых происходит быстрый нагрев, например, когда лезвие активировано и соприкасается с костью или другими твердыми материалами или когда используется чрезмерная сила для сопряжения лезвия с нужными участками ткани. Это примеры случаев; Можно привести другие клинические сценарии, при которых может происходить быстрый нагрев лезвия и при которых алгоритм ткани, описанный в настоящем документе, представляется полезным.
Алгоритм ткани, представленный логическими схемами 1200, 1300, 1400 и любой из алгоритмов, описанных в настоящем документе, может использоваться для любого из генераторов 30, 500, 1002, описанных в настоящем документе, и другими подходящими генераторами, такими как генераторы GEN 04, GEN 11 производства Ethicon Endo-Surgery, Inc., Цинциннати, штат Огайо и связанными с ними устройствами, системами, которые могут использовать алгоритм или технологию, описанную в настоящем документе. Таким образом, описание алгоритма ткани вкупе со схемами 1200, 1300, 1400 приведено для генераторов 30, 500, 1002, о которых говорится в описании соответствующих ФИГ. 1-9, 10-13 и 16-19.
Таким образом, обращаясь сейчас к ФИГ. 1-14, частота резонансной системы лезвия/рукоятки любого из ультразвуковых хирургических инструментов 100, 120, 1004 зависит от температуры. Когда, например, ультразвуковой концевой зажим типа ножниц производит разрез участка зажатой ткани, лезвие нагревается и утончает ткань до тех пор, пока в конечном итоге не происходит разрез данной ткань. На этом этапе лезвие упирается в тканевую пластину и, если между ними сохраняется зажимное давление, поверхность контакта лезвия и пластины направляет энергию в механическое или вибрационное движение лезвия относительно пластины. Энергия, «приложенная» к границе контакта перейдет главным образом кромке лезвия, поскольку материал пластины в достаточной степени обладает изолирующими свойствами. Именно эта тепловая энергия изменяет жесткость кромки лезвия, соответствующим образом изменится и системный резонанс в силу этих локализованных (на кромке) условий. Генератор 30, 500, 1002 отслеживает этот резонанс. Пример захвата типа ножниц иллюстрирует один из сценариев, для которых полезен данный алгоритм. Дополнительные сценарии предполагают разрезание в противоположном направлении с помощью приспособления типа ножниц при закрытом положении зажимного рычага, когда лезвие режет трудно поддающуюся или твердую ткань, или любой сценарий, при котором желательно наличие информации о температурном состоянии концевого зажима лезвия. Алгоритм ткани, который применяет логические операции для такого отслеживания резонанса и, соответственно, температурное состояние кромки лезвия описано сейчас в связи с логическими схемами 1200, 1300, 1400 на ФИГ. 20-22.
В дополнение к этому, описание алгоритма ткани, о котором говорится в связи с логическими схемами 1200, 1300, 1400, сопровождается примерами с использованием данных, полученных с помощью любого из ультразвуковых хирургических инструментов 100, 120, 1004, в состав которых входит соответствующий генератор 30, 500, 1002, описанный в настоящем документе.
Алгоритм ткани, описанный в связи с логическими схемами 1200, 1300, 1400, работает на основе отслеживания электрических управляющих сигналов, особенно тех, которые коррелируют с резонансной частотой управляющего сигнала. Алгоритм отслеживает резонансную частоту и ее изменение со временем (т.е., первую производную частоты по времени). В данном документе такое изменение частоты со временем называется наклоном частоты. Наклон частоты рассчитывается локально (с учетом времени) путем расчета изменений в частоте смежных (или относительно близких) замеров и деления на соответствующее изменение во времени. Из-за переходных состояний сигнала может использоваться усреднение либо любой из множества применимых методов фильтрования или сглаживания (таким образом, чтобы можно было легче распознать тенденции и предотвратить быстрое включение/выключение наборов условий). Графики, изображенные на ФИГ. 62, 63, 64, иллюстрируют расчет наклона частоты и использование методов усреднения (например, экспоненциально взвешенного скользящего среднего, или ЭВСС) для получения величин наклона частоты, полезных для управления/отслеживания. Другие определения наклона частоты включают в себя, помимо прочих, такие определения как «первая производная частоты» и «изменение частоты с течением времени».
На ФИГ. 20 представлена логическая схема 1200 алгоритма ткани, который может реализовываться в одном из вариантов, генератора 30, 500, 1002 и/или автономном генераторе или управляющей схеме инструмента. В общем смысле алгоритм ткани, описанный в привязке к логической схеме 1200, оценивает электрические сигналы в реальном времени с учетом набора логических условий, которые коррелируют с интересующим событием (например, быстрым нагревом лезвия ультразвукового инструмента). Таким образом, генератор 30, 500, 1002 определяет, когда выполняется набор логических условий и стимулирует соответствующий набор откликов. Термины «Набор условий» и «Набор откликов» определяются следующим образом:
(1) Набор условий - это набор логических условий, в отношении которых происходит отслеживание электрических сигналов в реальном времени.
(2) Набор откликов - это один или более откликов системы генератора 30, 500, 1002 на набор условий, которые были выполнены.
На этапе 1202 генератор 30, 500, 1002 переводится в режим ультразвукового запуска в состоянии готовности.
На этапе 1204 генератор 30, 500, 1002 активируется на заданном уровне мощности N. Когда пользователь активирует хирургическую систему 19, 190, 1000, соответствующий генератор 30, 500, 1002 дает отклик в форме поиска резонанса хирургической системы 19, 190, 1000, а затем линейным изменением выходного сигнала на концевые зажимы 81, 810, 1026 до необходимых показателей для заданного уровня мощности.
На этапе 1206 алгоритм ткани определяет, используются ли параметры, связанные с алгоритмом ткани, путем определения, когда активирована по меньшей мере одна метка набора условий/Набора откликов. Если не активирована ни одна из таких меток, алгоритм следует по ветке «Нет», и на этапе 1208 хирургическая система 19, 190, 1000 работает в нормальном ультразвуковом режиме, а на этапе 1210 соответствующий генератор 30, 500, 1002 отключается, когда процедура воздействия на ткань завершена.
Когда по меньшей мере одна метка задания набора условий/Набора откликов активирована, алгоритм следует по ветке «Да», а генератор 30, 500, 1002 использует оценку сигнала алгоритма ткани 1300 после перезагрузки Таймера X и схемы-защелки Таймера X. Алгоритм ткани 1300, более подробно описанный далее, может сообщить, выполнен ли или является ли «истинным» в настоящее время данный набор условий. В одном из вариантов, по меньшей мере одна метка для задания наборов условий/Наборов откликов может храниться в образе памяти EEPROM инструмента 100, 120, 1004, присоединенного к соответствующему генератору 30, 500, 1002. Метки памяти EEPROM для перевода наборов условий/Наборов откликов в состояние активации представлены в ТАБЛИЦЕ 1.
В одном из вариантов, участок логической схемы 1200, отвечающий за оценку сигнала алгоритма ткани 1300, использует два набора условий, каждый из которых имеет набор откликов, которые более подробно описаны в привязке к логическим схемам 1300, 1400. Логика алгоритма ткани 1300 может быть проиллюстрирована следующим образом: когда выполняется набор условий 1, запускается набор откликов 1. При наличии двух наборов условий включается иерархический отклик (дифференцированные отклики в зависимости от уровня условия), а также существует возможность управления сложной последовательностью событий.
На этапе 1210 запускаются отклики на выполненные наборы условий. Цикл 1212 повторяется до тех пор, пока не будут выполнены наборы условий и генератор 30, 500, 1002 не отключится на этапе 1214.
Импульсный отклик является более сложным и требует более подробного пояснения, чем относительно простые отклики в виде звука и изображения на ЖК-экране. Когда запускается импульсный отклик, генератор 30, 500, 1002 выдает импульсный сигнал в соответствии со следующими четырьмя параметрами:
(1) Амплитуда первого импульса (параметр EEPROM, одно значение на каждый уровень мощности) - управляющая амплитуда первого импульса;
(2) Время первого импульса (параметр EEPROM) - время, за которое возбуждается амплитуда первого импульса;
(3) Амплитуда второго импульса (параметр EEPROM, одно значение на каждый уровень мощности) - управляющая амплитуда второго импульса; и
(4) Время второго импульса (параметр EEPROM) - время, за которое возбуждается амплитуда второго импульса.
В определенных вариантах, амплитуда первого импульса и амплитуда второго импульса могут увеличиваться, уменьшаться или оставаться одинаковыми по отношению друг к другу. Например, в определенных вариантах, амплитуда первого импульса и амплитуда второго импульса могут быть равны. В дополнение к этому, в определенных вариантах, период времени первого импульса и период времени второго импульса могут иметь любые подходящие значения, в том числе, например, доли секунды, минуты, часы, и т.д. В одном из описанных в примере вариантов, период времени первого импульса и период времени второго импульса могут составлять 55 секунд.
При запуске импульсного выходного сигнала, генератор 30, 500, 1002 запускает первый импульс, затем второй импульс, затем повторяет. Импульсная амплитуда может выражаться в следующих единицах: процент от выходного тока при заданном уровне мощности. Заданный уровень мощности может устанавливаться путем активации переключателя (МИН или МАКС) и настройки генератора при активированной позиции МИН.
На ФИГ. 21 представлена логическая схема 1300 части алгоритма ткани, представленного на ФИГ. 20, отвечающей за оценку сигнала алгоритма ткани, которая может использоваться в одном из вариантов, генератора. Алгоритм ткани 1300 может определять, выполнен ли один или более наборов условий (и, соответственно, следует ли запускать соответствующие наборы откликов на этапе 1210). Схема оценки сигнала тканевого алгоритма, изображенная на ФИГ. 21, показывает применение параметра «время ожидания» 1304 и расчет наклона частоты (также называемого локальным наклоном частоты, поскольку это текущий расчет).
На этапе 1302 алгоритм рассчитывает время, прошедшее с момента активации, инициированной на этапе 1204 (ФИГ. 20). Это время выражается как TЗатраченное, равное TСистемы-TПитание включено. Как говорилось ранее, когда пользователь активирует хирургическую систему 19, 190, 1000, соответствующий генератор 30, 500, 1002 дает отклик в виде поиска резонанса хирургической системы 100, 120, 1004, а затем линейного изменения выходного сигнала, подаваемого на соответствующие концевые зажимы 81, 810, 1026, до необходимых показателей для заданного уровня мощности.
В течение этого времени попутные переходные состояния сигнала могут затруднять применение логики алгоритма. Поэтому алгоритм использует параметр «время ожидания» 1304, который хранится в образе памяти EEPROM, расположенной в рукояточной части ультразвукового хирургического инструмента 100, 120, 1004. Параметр «время ожидания» 1304 (параметр EEPROM) определяется как время в начале активации, когда генератор 30, 500, 1002 не применяет алгоритм ткани для уменьшения влияния переходных состояний линейного сигнала, обусловленных резонансом поиска и запуска, на логику алгоритма. Обычная величина параметра «время ожидания» 1304 составляет около 0,050-0,600 секунды (50-600 мс).
На этапе 1306 TЗатраченное сравнивается с величиной параметра «время ожидания» 1304. Если TЗатраченное меньше или равно величине параметра «время ожидания"1304, алгоритм следует по ветке «Нет» и рассчитывает на этапе 1302 новое TЗатраченное. Если TЗатраченное больше, чем величина параметра «время ожидания» 1304, алгоритм следует по ветке «Да» и оценивает сигнал.
На этапе 1308 алгоритм выполняет функцию Оценка характеристик сигнала/Отслеживание. Как говорилось ранее, одним из аспектов алгоритма функции является отслеживание наклона частоты. В физическом смысле наклон частоты коррелирует с тепловым потоком, входящим в колебательную систему или выходящим из нее, где колебательная система включает в себя лезвие и звуковую плату рукоятки, как ультразвуковые системы 100, 120, 1004, описанные в настоящем документе. Изменения в частоте и наклоне частоты во время работы на ткани обусловлены изменениями, происходящими в концевом зажиме (высыхание ткани, отделение и контактирование лезвия с зажимной пластиной). Когда лезвие нагревается (т.е., тепловой поток направлен к лезвию), наклон частоты имеет отрицательное значение. Когда лезвие остывает (т.е., тепловой поток направлен от лезвия), наклон частоты имеет положительное значение. Таким образом, алгоритм рассчитывает наклон между замерами частоты т.е., входящими замерами частоты 1310 (Ft) и предыдущими Ft замерами 1312. Рассчитываемый наклон частоты может также называться локальным наклоном частоты, поскольку это текущий расчет. Локальный наклон кривой частоты может обозначаться как FНаклон_Част, Ft, и равен наклону кривой частоты (FНаклон_Част) при резонансной частоте (Ft). Локальный наклон кривой частоты может направляться набору условий 1, набору условий 2 1400, например, для оценки в соответствии со схемой 1400, изображенной на ФИГ. 22. Хотя показаны два набора условий, следует понимать, что в некоторых вариантах, может иметься дополнительный набор условий.
На ФИГ. 22 представлена логическая схема 1400 для оценки наборов условий для алгоритма ткани оценки сигнала, показанного на ФИГ. 21, который может использоваться в одном из вариантов, генератора, такого как 30, 50, 1002. Логическая схема 1400 оценивает набор условий X, где X - либо 1, либо 2.
В соответствии с алгоритмом ткани, на этапе 1402 локальный наклон кривой частоты, рассчитываемый на этапе 1308 (ФИГ. 21), сравнивается с пороговым значением наклона кривой частоты 1404 для набора условий X при уровне мощности N. Пороговые параметры наклона кривой частоты 1404 могут храниться в памяти EEPROM, расположенной в присоединенном инструменте 100, 120, 1004, где значение параметра EEPROM хранится для каждого уровня мощности. Когда локальный наклон кривой частоты, рассчитываемый на этапе 1308, падает ниже порогового значения наклона кривой частоты 1404, на этапе 1210 может запускаться первый набор откликов (ФИГ. 20). Когда лезвие нагревается относительно быстрыми темпами, наклон кривой частоты становится более отрицательным, а алгоритм ткани идентифицирует это условие при помощи падения наклона кривой частоты ниже порогового значения наклона кривой частоты 1404. Наклон кривой частоты показывает темпы тепловых изменений или теплового потока, поступающего в лезвие или от него.
В соответствии с алгоритмом ткани, также на этапе 1402, резонансная частота сравнивается с пороговым значением параметра частоты 1406 для набора условий X. Пороговое значение параметра частоты 1406 может храниться в памяти EEPROM, расположенной в присоединенном инструменте 100, 120, 1004. Когда резонансная частота падает ниже порогового значения параметра частоты 1406, на этапе 1210 может запускаться второй набор откликов (ФИГ. 20). По мере того, как лезвие продолжает нагреваться, частота продолжает падать. Пороговое значение параметра частоты 1406 предназначено для повышения устойчивости алгоритма с помощью дополнительной информации о температурном состоянии лезвия (в дополнение к более динамическому показателю, наклону кривой частоты). Падение частоты по причине какого-либо известного условия, такого как комнатная температура, представляет собой хороший показатель температурного состояния колебательной системы относительно этих известных температурных условий.
В некоторых вариантах, наклон кривой частоты и резонансная частота могут использоваться в обычном наборе условий. Например, набор условий может не выполняться, если и наклон кривой частоты, и резонансная частота не достигают заданных порогов. Например, на этапе 1402, когда наклон кривой частоты (FНаклон_Част) меньше, чем пороговое значение параметра наклона кривой частоты 1404, а резонансная частота (Ft) меньше, чем пороговое значение параметра частоты 1406, алгоритм следует по ветке «ДА» на этап 1408 и увеличивает значение Таймера X (где X соответствуете конкретному набору условий, оцениваемых алгоритмом ткани).
При сравнении электрических сигналов, например, наклона кривой частоты (FНаклон_Част) и резонансной частоты (Ft) с соответствующими пороговыми параметрами 1404, 1406 пограничные состояния, когда сигнал скачет назад и вперед между пороговыми значениями, могут учитываться следующим образом. В одной из разновидностей алгоритм ткани использует значение параметра «время, требующееся перед запуском» 1412 (которое также может храниться в памяти EEPROM инструмента) для конкретного набора условий X для принятия во внимания данного условия. Параметр «время, требующееся перед запуском» 1412, определяется как время, необходимое перед запуском (параметр EEPROM) - это время, которое требуется для того, чтобы наклон кривой частоты и/или частота приняли значение меньшее, чем их соответствующие пороги, для запуска набора откликов. Это необходимо для предотвращения быстрого «метания назад-вперед» запуска откликов. Тем не менее, имеет смысл отслеживать и небыстрые колебания запуска откликов «назад и вперед», которые также могут иметь место.
Таким образом, на этапе 1414 алгоритм определяет, превышает ли значение Таймера X параметр «время, требующееся перед запуском» 1412 для набора условий X. Если значение Таймера X превышает значение параметра «время, требующееся перед запуском» 1412, алгоритм следует по ветке «ДА» и фиксирует состояние системы для набора условий X на этапе 1416. Выходной сигнал 1418 показывает, что набор условий X выполнен. Когда значение Таймера X меньше или равно значению параметра «время, требующееся перед запуском» 1412, алгоритм следует по ветке «НЕТ» и на выходе 1420 показывает, что набор условий X выполнен не был.
На этапе 1402, когда либо наклон кривой частоты (FНаклон_Част) больше или равен пороговому значению параметра наклона кривой частоты 1404, либо резонансная частота (Ft) больше или равна пороговому значению параметра частоты 1406, алгоритм следует по ветке «НЕТ» и перезагружает Таймер X на этапе 1410 (где X соответствует конкретному набору условий, оцениваемых алгоритмом ткани).
Для большей устойчивости алгоритм использует два параметра фиксации состояния системы. Без использования фиксации алгоритм выполнен с возможностью завершения набора откликов, когда либо (a) система отключена, либо (b) сигнал или сигналы имеют значения не ниже пороговых. Могут использоваться два параметра фиксации. Это параметр «минимальное время фиксации» 1422 и параметр «порог возврата наклона частоты» 1424. Параметры блокировки 1422, 1424 важны для устойчивости в связи с тем, что: (a) поверхности зажимной пластины становятся более скользкими с ростом температуры и (b) в импульсном выходном сигнале ожидаются переходные состояния сигнала при переходе импульса.
Параметр минимального времени фиксации 1422 (параметр EEPROM) можно определить как минимальный отрезок времени, требующийся для запуска отклика (откликов) на набор условий X. Факторы, которые необходимо учитывать в отношении минимального времени фиксации: (a) продолжительность периода времени, необходимого для проигрывания запущенного звукового отклика (например, в одном из вариантов, аудиофайл предварительного уведомления формата WAV может иметь длительность около 0,5 секунды), (b) обычное (примерно 0,5-1,0 с) или экстремально долгое (около 1,5-2,0 с) время пользовательского отклика на событие или (c) обычное время, затрачиваемое на повторный захват ткани для нескольких разрезов (известное как «марш» (около 1,1-2,0 секунд, где среднее время составляет около 1,6 секунды).
Параметр порога возврата наклона частоты 1424 (параметр EEPROM) можно определить как порог наклона кривой частоты, выше которого запущенный отклик останавливается (т.е. больше не запускается). Этим достигается более высокий порог возврата наклона кривой частоты, в задачу которого ставится различение работы с использованием пластины и браншей в открытом состоянии (против различения работы на ткани и работы на пластине).
В соответствии с частью алгоритма ткани, представленной логической схемой 1400, после перезапуска Таймера X на этапе 1410, на этапе 1426 алгоритм ткани определяет, установлена ли фиксация для набора условий X или фиксация возврата наклона частоты. Если не выполнена ни одна из фиксаций, алгоритм следует по ветке «НЕТ» и показывает на выходе 1420, что набор условий X не выполнен. Если одна из фиксаций выполнена, алгоритм следует по ветке «ДА» на этап 1428.
На этапе 1428 алгоритм определяет, превышает ли Время фиксации для набора условий X параметр минимального времени фиксации 1422 для набора условий X и превышает ли наклон кривой частоты (FНаклон_Част) параметр порога возврата наклона частоты 1424, алгоритм следует по ветке «ДА» и заново выполняет фиксацию для Таймера X на этапе 1430 и показывает на выходе 1420, что набор условий X не выполнен. Если Время фиксации для набора условий X меньше или равно параметру минимального времени фиксации 1422 для набора условий X, а наклон кривой частоты (FНаклон_Част) меньше или равен параметру порога возврата наклона частоты 1424, алгоритм следует по ветке «НЕТ» и показывает на выходе 1432, что набор условий X выполнен.
Как показано на ФИГ. 21 и 22, с точки зрения процесса существуют два одинаковых набора условий 1 и 2. Данные наборы условий 1 и 2 имеют дублированные наборы параметров, представленных в ТАБЛИЦЕ 2. Параметры алгоритма, одновременно используемые наборами условий 1 и 2, показаны в ТАБЛИЦЕ 3.
В ТАБЛИЦЕ 2 приведена сводная информация о дублированных параметрах EEPROM для каждого из наборов условий и количестве параметров для каждого набора условий.
В ТАБЛИЦЕ 3 приведена сводная информация об общих параметрах EEPROM для каждого из наборов условий (не дублированных) и количестве параметров.
Для ясности представленной информации алгоритм ткани, описанный в привязке к логическим схемам 1200, 1300, 1400, изображенным, соответственно, на ФИГ. 20-22, сейчас будет рассмотрен с использованием четырех примеров. Основное применение алгоритма ткани включает в себя отслеживание наклона кривой частоты, резонансной частоты или и того, и другого и их сравнение с пороговыми значениями. Таким образом, первый пример включает в себя отслеживание наклона кривой частоты в сравнении с ее пороговым значением и проиллюстрирован на ФИГ. 23-28. Второй пример включает в себя отслеживание резонансной частоты в сравнении с ее пороговым значением и проиллюстрирован на ФИГ. 29-31. Третий пример включает в себя отслеживание и наклона кривой частоты, и резонансной частоты в сравнении с их пороговыми значениями и проиллюстрирован на ФИГ. 32-34. Наконец, четвертый пример также включает в себя отслеживание и наклона кривой частоты, и резонансной частоты в сравнении с пороговыми значениями.
Пример 1: Отслеживание наклона кривой частоты в сравнении с ее пороговым значением
Первый пример рассматривает отслеживание наклона кривой частоты в сравнении с ее пороговым значением и проиллюстрирован на ФИГ. 23-28. Первый пример, наиболее простой, иллюстрирует запуск набора откликов, связанный только с наклоном кривой частоты. В ТАБЛИЦЕ 4 приведены репрезентативные параметры для этой цели для хирургических инструментов, таких как любой из хирургических инструментов 19, 190, 1000, описанных в настоящем документе, в состав которых входит соответствующий ультразвуковой инструмент, такой как ультразвуковые инструменты 100, 120, 1004, описанные в настоящем документе.
На ФИГ. 23-25 изображены параметры сигнала, генерируемого генератором с репрезентативными иллюстративными параметрами, приведенными в ТАБЛИЦЕ 4. Генератор может быть идентичным генераторам 30, 500, 1002, описанным в настоящем документе, и составлять часть соответствующей хирургической системы 19, 190, 1000, работающей в ультразвуковом режиме (например, ультразвуковой системы 19, 190, 1000), воздействующей на ткань в соответствии с приведенной в настоящем документе информацией.
Использование только наклона частоты для запуска набора условий может быть далее продемонстрировано в пробном сценарии или тесте. На ФИГ. 26-28 изображены параметры сигнала, выдаваемого генератором с репрезентативными/примерными параметрами, приведенными в ТАБЛИЦЕ 4, во время пробного сценария или теста. Приработочное испытание симулирует вариант использования, при котором пользователь активирует ультразвуковой хирургический инструмент типа ножницы без вмешательства в ткань (например, разрезание в обратном направлении при сомкнутых браншах). Данный тест может также быть полезен для подсчета характеристик устройства, таких как, например, время отклика.
Время отклика ультразвукового инструмента может определяться как время, требующееся ультразвуковой системе (инструменту, ручному блоку и генератору с алгоритмом ткани) для отклика, направляемого зажимной пластине, контактирующей с лезвием. Ультразвуковая система обычно изначально активируется в «воздушной среде» (т.е., без нагрузки), зажимной рычаг сомкнут относительно лезвия и удерживается в руке в течение какого-то периода времени, затем зажимной рычаг открывается и ультразвуковая система деактивируется. Время отклика - это время между моментом, когда статическая мощность (нерабочая мощность) начинает изменяться в силу того, что зажимная пластина начинает контактировать с лезвием, и моментом, когда запускается набор откликов. Также данный тест позволяет рассчитать скорость охлаждения - чем выше скорость охлаждения (при допущении, что условия конвективной границы одинаковы), тем больше тепловой энергии или остаточного тепла находится в лезвии. Скорость охлаждения пропорциональна наклону частоты (пояснение: положительная величина наклона кривой частоты связана с мгновенным тепловым потоком, направленным от лезвия). Как будет пояснено позже, скорость охлаждения также может отслеживаться и использоваться в целях контроля, так чтобы, например, если скорость охлаждения, определяемая положительным наклоном кривой частоты, превышает пороговое значение, специалист понимал, что лезвие «несет» большое количество тепловой энергии и быстро ее рассеивает.
На ФИГ. 23A представлен график зависимости 1500 наклона частоты от времени 1502 в одном из вариантов, генератора во время обычного разрезания ткани. Наклон частоты (кГц/с) показан по вертикальной оси, а время (с) - по горизонтальной оси для обычного разрезания ткани с использованием любой из хирургических систем, в состав которых входит соответствующий ультразвуковой хирургический инструмент с установленным уровнем мощности 5. Порог наклона частоты 1504, используемый здесь, составлял -0,06 кГц/с и изображен горизонтальной пунктирной линией. Вертикальная прерывисто-точечная линия 1506 показывает время (2,32 секунды), когда ткань начала отделяться, а вертикальная пунктирная линия 1508 показывает время (2,55 секунды), когда ультразвуковая система запустила набор откликов (в данном случае, согласно ТАБЛИЦЕ 4, только слышимый звук).
На ФИГ. 23B представлен график второй производной частоты по времени (наклон наклона кривой частоты) как функции времени 1503 (показан пунктиром), наложенный на кривую 1502, представленную на ФИГ. 23, для одного из вариантов генератора при обычном разрезании ткани.
На ФИГ. 24 представлено отношение графика 1510 зависимости частоты от времени 1512 в одном из вариантов, генератора при обычном разрезании ткани к графику на ФИГ. 23A. Наклон частоты (кГц) отображен по вертикальной оси, а время (с) - по горизонтальной оси при обычном разрезании ткани с использованием любой из хирургических систем с установленным уровнем мощности 5. Вертикальная прерывисто-точечная линия 1506 показывает время (2,32 секунды), когда ткань начала отделяться, а вертикальная пунктирная линия 1508 показывает время (2,55 секунды), когда ультразвуковая система запустила набор откликов (в данном случае только слышимый звук).
На ФИГ. 25 представлено отношение графика 1514 зависимости потребления мощности от времени 1514 одного из вариантов генератора при обычном разрезании ткани к графику на ФИГ. 23А. Мощность (Вт) отображена по вертикальной оси, а время (с) - по горизонтальной оси при обычном разрезании ткани с использованием любой из хирургических систем с установленным уровнем мощности 5. Вертикальная прерывисто-точечная линия 1506 показывает время (2,32 секунды), когда ткань начала отделяться, а вертикальная пунктирная линия 1508 показывает время (2,55 секунды), когда ультразвуковая система запустила набор откликов (в данном случае только слышимый звук).
На ФИГ. 26 представлен график 1516 наклона частоты как функции времени 1518 в одном из вариантов, генератора при приработочном испытании. Параметры, используемые в данном тесте, соответствуют параметрам, приведенным в ТАБЛИЦЕ 4. Наклон частоты (кГц/с) отображен по вертикальной оси, а время (с) - по горизонтальной оси для обычного разрезания ткани с использованием любой из хирургических систем с установленным уровнем мощности 5. Порог наклона частоты 1504, используемый здесь, составлял -0,06 кГц/с и изображен горизонтальной пунктирной линией. Вертикальная точечная линия 1524 отображает момент времени (2,49 секунды), когда статическая мощность начинает изменяться с началом зажимного действия, вертикальная прерывисто-точечная линия 1506 показывает время (2,66 секунды), когда выход мощности на рабочий режим завершился, а вертикальная пунктирная линия 1508 показывает время (2,72 секунды), когда ультразвуковая система запустила набор откликов (в данном случае, только слышимый звук). Как показано на графике 1516, наклон частоты на этапе 1520 связан со скоростью охлаждения или тепловым потоком, идущим от лезвия. В дополнение к этому, время отклика 1522 ультразвуковой системы измеряется как задержка по времени между моментом времени (2,49 секунды), когда статическая мощность начинает изменяться с началом зажимного действия, и временем (2,72 секунды), когда ультразвуковая система запускает набор откликов.
На ФИГ. 27 представлено отношение графика 1524 зависимости частоты от времени 1526 в одном из вариантов, генератора при приработочном испытании к графику на ФИГ. 26. Наклон частоты (кГц) отображен по вертикальной оси, а время (с) - по горизонтальной оси при обычном разрезании ткани с использованием любой из хирургических систем с установленным уровнем мощности 5.
На ФИГ. 28 представлено графическое изображение 1528 отношения кривой зависимости потребления мощности от времени 1530 в одном из вариантов, генератора при приработочном испытании к графику на ФИГ. 26. Мощность (Вт) отображена по вертикальной оси, а время (с) - по горизонтальной оси при обычном разрезании ткани с использованием любой из хирургических систем с установленным уровнем мощности 5.
Пример 2: Запуск набора условий в зависимости только от порогового значения частоты
Второй пример рассматривает запуск набора условий в зависимости только от порогового значения частоты и проиллюстрирован на ФИГ. 29-35. В ТАБЛИЦЕ 5 в этих целях приведены репрезентативные параметры для хирургических инструментов, таких как любой из хирургических инструментов 19, 190, 1000, описанных в настоящем документе, в состав которых входит соответствующий ультразвуковой инструмент, такой как ультразвуковые инструменты 100, 120, 1004, описанные в настоящем документе. Следует понимать, что запуск в привязке к порогу частоты может иметь ограниченное применение, поскольку он менее показателен с точки зрения состояния концевого зажима и представлен здесь для полноты информации. Включение наклона частоты в алгоритм ткани, описанный в отношении логических схем 1200, 1300, 1400, предназначено для использования в комбинационной логической схеме (в сочетании с использованием порога наклона частоты), о чем рассказывается в следующем разделе настоящей спецификации.
На ФИГ. 29-34 изображены кривые, генерируемые генератором с репрезентативными/иллюстративными параметрами, приведенными в ТАБЛИЦЕ 5. Генератор может быть идентичен генераторам 30, 500, 1002, описанными в настоящем документе, и составлять часть соответствующей хирургической системы 19, 190, 1000, работающей в ультразвуковом режиме (например, ультразвуковой системы 19, 190, 1000), воздействующей на ткань в соответствии с приведенной в настоящем документе информацией.
Выбор порога частоты, равного 55 100 Гц, как в ТАБЛИЦЕ 5, обусловлен экспериментальными данными для двух случаев некорректного использования: (1) когда ультразвуковой инструмент работает на тканевой пластине в течение превышенного периода времени; (2) когда ультразвуковой инструмент используется для выполнения десяти последовательных разрезов на фрагменте ткани свиной тонкой кишки максимально быстро при работающем генераторе во время всего процесса. Каждый из этих двух случаев некорректной работы будет подробно рассмотрен в описании к ФИГ. 29 и ФИГ. 30-31A-C.
На ФИГ. 29 изображены кривые 1600 изменения частоты 1602 с течением времени для нескольких генераторов во время испытаний. Изменение частоты (кГц) через X секунд испытаний показано по вертикальной оси, а номер ультразвукового хирургического инструмента показан на горизонтальной оси. На ФИГ. 29 представлены данные изменений частоты после пролонгированных испытаний ультразвукового хирургического инструмента, где ультразвуковой хирургический инструмент работает на тканевой пластине в течение пролонгированного периода времени (пролонгированное испытание). Выбор значения частоты, равного 55 100 Гц, ограничивает это условие временным интервалом не более 4 секунд или падением частоты на 700 Гц с резонансной частоты 55 800 Гц при нормальной комнатной температуре. Данные изменения частоты 16021, 16022, 16023, 16024 были выделены из данных генератора 30, 500, 1002 через, соответственно, 1, 2, 3 и 4 секунды испытаний. Номинальная стартовая частота пяти ультразвуковых хирургических инструментов составляла 55,8 кГц (лезвия начали работу при комнатной температуре). Второе и пятое устройства работали недостаточно долго для генерирования полного набора данных для всех моментов времени.
На ФИГ. 30 представлены совмещенные графики 1604 зависимости нормированных сопротивления, тока и частоты от времени, а также потребляемой мощности, затраченной энергии и температуры для одного из вариантов генератора, соединенного с соответствующим ультразвуковым инструментом, используемым для 10 последовательных разрезов на ткани (например, на фрагменте ткани свиной тонкой кишки) максимально быстро при постоянно работающем генераторе. Эти данные и методы их получения отражают условия некорректного использования.
Репрезентативные данные на ФИГ. 30 показаны более четко в описании к ФИГ. 31A-C. На ФИГ. 31A представлено графическое изображение 1606 кривой зависимости сопротивления от времени 1608 и кривой зависимости тока от времени 1610 для одного из вариантов генератора в процессе выполнения последовательных разрезов на ткани за период времени. Сопротивление (Ом) и ток (мА) отображены по вертикальной оси, а время (с) - по горизонтальной.
На ФИГ. 31B представлено графическое изображение 1612 кривой зависимости резонансной частоты от времени 1614 сигнала для одного из вариантов генератора в процессе выполнения последовательных разрезов на ткани за период времени. Резонансная частота (кГц) показана по вертикальной оси, а время (с) - по горизонтальной.
На ФИГ. 31C представлено графическое изображение 1616 кривой зависимости мощности 1618, энергии 1620 и температуры 1622 от времени для одного из вариантов генератора в процессе выполнения последовательных разрезов на ткани за период времени. Мощность (Вт), энергия (Дж) и температура (C) показаны по вертикальной оси, а время (с) - по горизонтальной.
Таким образом, обращаясь сейчас к ФИГ. 31A-C, как показано на графических изображениях 1612, можно видеть, что после того, как резонансная частота 1614 упала на 700 Гц (с 55,8 кГц до 55,1 кГц) в точке 1615 при выполнении третьего разреза (который является особенно некорректным, поскольку ткань касалась только кончиков инструмента). После того, как кривая резонансной частоты 1614 упала на 700 Гц (с 55,8 кГц до 55,1 кГц) на третьем разрезе, ультразвуковой инструмент начинает насыщать генератор, и кривая тока 1610 слегка падает при выполнении всех последующих разрезов. Поскольку кривая управляющего тока 1610 пропорциональна смещению кромки лезвия, падение кривой тока 1610 приводит к уменьшению скорости воздействия на ткань и, следовательно, уменьшению скорости накопления энергии (и уменьшению скорости нагревания, т.е., наклон частоты становится менее отрицательным). Управлять этим изменением, обусловленным падением кривой тока 1610 во время процесса, возможно с использованием и изменения частоты, и изменения наклона частоты. Это будет рассматриваться в Примерах 3 и 4 в последующих разделах настоящей спецификации.
На ФИГ. 32 представлено совмещенное графическое изображение 1630 кривой зависимости частоты от времени 1632, кривой зависимости взвешенного наклона частоты от времени 1634 (рассчитанного с помощью экспоненциально взвешенного скользящего среднего с альфа-фактором 0,1) и кривой зависимости температуры от времени 1636, генерируемых генератором, идентичным одному из вариантов генераторов, описанных в настоящем документе. Ультразвуковая система имела резонансную частоту при комнатной температуре (режим продольных колебаний), незначительно превышавшую резонансную частоту, для которой была составлена ТАБЛИЦА 5. Поэтому пороговое значение частоты 1633 было увеличено соответственно с 55 100 Гц, указанных в ТАБЛИЦЕ 5 примерно до 55 200 Гц, как показано на ФИГ. 33 пунктиром. Работа осуществлялась на ткани (например, на фрагменте ткани свиной тонкой кишки), при этом ультразвуковая система имела резонанс при комнатной температуре, равный примерно 55,9 кГц при уровне мощности 5. Отделение ткани происходит через 6,25 секунды; один край ткани отделяется от лезвия примерно через 8 секунд; полное отделение происходит примерно через 10 секунд. На ФИГ. 33 представлено графическое изображение кривой зависимости частоты от времени 1632 одного из вариантов генератора 30, 500, 1002. Частота (кГц) показана по вертикальной оси, а время (с) - по горизонтальной оси. На ФИГ. 33 показан пример использования порога частоты 1633 с использованием только тех параметров, которые соответствуют параметрам, приведенным в ТАБЛИЦЕ 5, но доведенного до 55 200 Гц, как показано пунктиром 1633. Резонансная частота 1632 пересекает порог частоты 1633 (горизонтальная пунктирная линия, проведенная на отметке 700 Гц ниже резонанса при комнатной температуре) примерно через 11 секунд. В этот момент времени может быть запущен набор откликов.
На ФИГ. 34 представлено графическое изображение 1634 кривой зависимости взвешенного наклона частоты от времени 1634 в одном из вариантов, генератора. Взвешенный наклон частоты (кГц/с) показан по вертикальной оси, а время (с) - по горизонтальной оси. Кривая наклона частоты 1634 рассчитывается с помощью экспоненциально взвешенного скользящего среднего с альфа-фактором 0,1. На ФИГ. 34 кривая наклона частоты 1634 пересекает порог наклона частоты 1635 (горизонтальная пунктирная линия), и примерно через 5,8 секунды может быть запущен набор откликов.
Оставшиеся Примеры 3 и 4 относятся к использованию нескольких наборов условий, что требует более сложного варианта использования алгоритма ткани и предполагает отслеживание наклона частоты и/или частоты относительно их пороговых значений и может включать иерархический подход к запуску наборов откликов.
Пример 3: Запуск набора откликов в зависимости и от порога наклона частоты, и от порога частоты
В третьем примере рассматривается запуск набора откликов в зависимости и от порога наклона частоты, и от порога частоты. В ТАБЛИЦЕ 6 в этих целях приведены репрезентативные параметры для хирургических инструментов, таких как любой из хирургических инструментов 19, 190, 1000, описанных в настоящем документе, в состав которых входят соответствующие ультразвуковые инструменты, такие как ультразвуковые инструменты 100, 120, 1004, описанные в настоящем документе.
В данном случае, описываемом в Примере 3, продемонстрирован многоуровневый или иерархический отклик. Комбинационная логическая схема порога наклона частоты и порога частоты будет проиллюстрирована с использованием тех же графических изображений, которые представлены на ФИГ. 32-34. На ФИГ. 34, набор условий 1 запускается тогда, когда кривая наклона частоты 1634 пересекает порог наклона частоты 1635 примерно через 6 секунд. Набор откликов для набора условий 1 может включать в себя низкоуровневую звуковую индикацию. По мере того, как пользователь продолжает активировать инструмент с минимальным воздействием на ткань, запускается набор условий 2, когда резонансная частота опускается ниже порогового значения частоты 1633 примерно через 11 секунд, как показано на ФИГ. 33. набор откликов для набора условий 2 может заключаться в более громком звуковом сигнале, например.
Пример 4: Запуск набора откликов в зависимости и от порога наклона частоты, и от порога частоты
В четвертом примере рассматривается применение порогов частоты и наклона частоты при некорректных состояниях хирургического инструмента. В силу различных причин уровни сигнала наклона частоты могут снижаться (т.е. становиться менее отрицательными) при более длительном использовании.
При некорректных условиях кривые частоты, наклона частоты и тока могут отклоняться от нормальной работы и могут генерироваться в течение всего времени активации ультразвукового инструмента при уровне мощности 5, когда бранши ультразвукового инструмента находятся в открытом состоянии в течение 1 секунды, затем в закрытом в течение 1 секунды, и всего совершается 17 таких циклов.
Когда ультразвуковой инструмент несколько раз приводится в действие, непосредственно контактируя с пластиной, характерная кривая наклона частоты в первой области перед остановкой генератора принимает менее отрицательное значение, чем во второй, когда генератор насыщается, по большей части, в силу эффективности системы и итогового смещения/снижения тока. На том отрезке кривой наклона частоты, где генератор не достиг насыщения, ультразвуковая система еще не достигла насыщения, и ток поддерживается на заданном значении для уровня 5 или около него. На том отрезке кривой наклона частоты, где генератор достиг насыщения, ток (и, следовательно, смещение кромки лезвия) непрерывно снижается, что вызывает увеличение наклона частоты (скорость нагревания падает). Обратите внимание, что после нескольких некорректных циклов, например, четвертого некорректного цикла, который является приблизительной границей между отрезками, когда генератор не достиг и достиг насыщения, резонансная частота падает, как показано на ФИГ. 29-31A-C. Для отрезков, когда генератор не достиг и достиг насыщения, могут применяться разные наборы условий. Порог первого наклона частоты может использоваться на отрезке, когда генератор не насыщен, когда резонансная частота превышает заданный порог, а порог второго, менее отрицательного наклона частоты, может использоваться, когда генератор насыщен, когда резонансная частота ниже того же самого заданного порога частоты.
Один из вариантов генератора может иметь кривую зависимости взвешенного порога частоты (кГц/с) от времени. Когда инструмент используется при некорректных условиях в контакте с пластиной, характерная кривая наклона частоты на отрезке, когда генератор не насыщен, становится менее отрицательной, чем на отрезке, когда генератор насыщен благодаря смягчению материала и соответствующему уменьшению коэффициента трения пластины. Отрезок кривой наклона частоты, когда генератор не достиг насыщения, соответствует периоду, когда пластина еще не начала существенно нагреваться. На отрезке кривой наклона частоты, соответствующем насыщению генератора, пластина начинает смягчаться, и граница между лезвием и пластиной становится более скользкой, по причине чего кривая наклона частоты растет (скорость нагрева уменьшается). Для отрезков, когда генератор не достиг и достиг насыщения, могут требоваться разные наборы условий. Порог первого наклона частоты может использоваться на отрезке, соответствующем ненасыщенному состоянию генератора, когда резонансная частота превышает заданный порог наклона частоты, а порог второго, менее отрицательного наклона частоты, может использоваться на отрезке, соответствующем насыщению генератора, когда резонансная частота ниже того же самого заданного порога наклона частоты.
Сейчас рассмотрим еще один вариант данного примера. В ТАБЛИЦЕ 7 приведены параметры ультразвукового инструмента, в которых используются два набора условий для вычисления уменьшающихся уровней сигнала наклона частоты по причине насыщения системы и снижения тока.
Данные, сгенерированные для этого примера, были получены с помощью ультразвукового инструмента, которым были максимально быстро выполнены десять последовательных разрезов на ткани тонкой кишки. Для частного случая данного примера на ФИГ. 35-36 показаны графики зависимости частоты от времени с использованием значений параметров, приведенных в ТАБЛИЦЕ 7.
На ФИГ. 35 представлено графическое изображение 1800 кривой зависимости частоты от времени 1802 одного из вариантов генератора в ходе выполнения десяти разрезов на ткани (например, ткани тонкой кишки) и графическое изображение 1804 кривой зависимости температуры от времени 1805. На графике 1800 частота (Гц) отображена по вертикальной оси, а время (с) - по горизонтальной. На графике 1804 температура (°F) отображена по вертикальной оси, а время (с) - по горизонтальной.
На ФИГ. 36 представлено графическое изображение 1805 кривой зависимости частоты от времени 1802, показанной на ФИГ. 35, одного из вариантов генератора при выполнении десяти разрезов на ткани (например, ткани тонкой кишки), где фрагменты, помеченные номером 1806, соответствуют работе на ткани. Частота (Гц) отображена по вертикальной оси, а время (с) - по горизонтальной оси.
Кривая частоты 1802, изображенная на ФИГ. 35 и 36, служит для иллюстрации частного случая данного примера, где используются два набора условий для вычисления наклона частоты, уменьшающегося в силу насыщения электрической системы (уменьшающееся смещение). Обратите внимание, что это тот же тестовый прогон, который проиллюстрирован на ФИГ. 29-31A-C. На ФИГ. 36 участки, помеченные номером 1806, соответствуют активации с воздействием на ткань (падения частоты, форма локальной кривой частоты, связанная с сухостью ткани - малый стартовый наклон становится круче по мере обезвоживания ткани), участки, помеченные номером 1808, означают активацию, когда в устройстве минимальный объем или вообще нет ткани (локальный наклон частоты очень крутой, форма кривой более линейная, наклоняется постепенно), участок кривой, на которой отсутствуют помеченные участки 1810, означает время, в течение которого устройство перемещается для выполнения следующего разреза, лезвие охлаждается в холостом режиме и быстро охлаждается при помещении на ткань (частота увеличивается).
На ФИГ. 37 представлено графическое изображение 1812 кривой зависимости наклона частоты от времени 1814 в одном из вариантов, генератора в ходе выполнения десяти разрезов на ткани тонкой кишки. Наклон частоты (кГц/с) отображен по вертикальной оси, а время (с) - по горизонтальной оси. Область B кривой наклона частоты 1814 отображает область десяти разрезов, где набор условий 2 запускается раньше, чем набор условий 1 в первый раз во время выполнения десяти разрезов (частота ниже 55,1 кГц, наклон частоты менее -0,045 кГц/с). Состояние, проиллюстрированное в области B, где набор условий 2 запускается раньше, чем набор условий 1, предпочтительно, поскольку к этому моменту ультразвуковая система последовательно насыщается (напряжение насыщается, а ток уменьшается, что приводит к уменьшению смещения и, следовательно, снижению скорости нагрева, требующей более высокого порога наклона частоты).
На ФИГ. 38 представлено графическое изображение 1816 кривой зависимости мощности от времени 1818, отражающей потребляемую мощность одного из вариантов генератора в ходе выполнения десяти разрезов на ткани (например, ткани тонкой кишки). Мощность (Вт) отображена по вертикальной оси, а время (с) - по горизонтальной оси.
На ФИГ. 39 представлено графическое изображение 1820 кривой зависимости тока от времени 1822 в одном из вариантов, генератора в ходе выполнения десяти разрезов на ткани тонкой кишки. Ток (мА) отображен по вертикальной оси, а время (с) - по горизонтальной оси.
После описания основного применения алгоритма ткани, приведенного в привязке к логическим схемам 1200, 1300, 1400, изображенным на ФИГ. 20-22 с точки зрения отслеживания наклона частоты, резонансной частоты или обеих этих величин относительно их пороговых значений далее речь пойдет о логических схемах и их использовании в части отношения к алгоритму ткани. Причины, по которым в алгоритм ткани включают логические схемы с фиксацией состояния: (a) предотвращение перезагрузки набора условий (Набор условий меняется с истинного на ложный) в силу того, что граница контакта лезвия и пластины становится более скользкой в ходе некорректного состояния, когда лезвие находится на пластине; (b) предотвращение перезагрузки набора условий (Набор условий меняется с истинного на ложный) по причине работы в импульсном режиме, когда периоды быстрого нагревания перемежаются с периодами менее быстрого нагревания (участки, когда тепловой поток направлен к лезвию и участки, когда тепловой поток направлен от лезвия, перемежаются). Первая и вторая причины проиллюстрированы на ФИГ. 48 и 49, соответственно. Как говорилось ранее в настоящем документе, два параметра фиксации, связанные с упомянутыми причинами, - это «порог возврата наклона частоты», проиллюстрированный на ФИГ. 40, и «минимальное время фиксации». Для полноты изложения на ФИГ. 43 представлены рассчитанные кривые наклона частоты при импульсной работе, проиллюстрированной на ФИГ. 41 и 42A-C.
На ФИГ. 40 представлено графическое изображение 1900 параметра «порог возврата наклона частоты» в привязке к кривой зависимости наклона частоты от времени 1902. На ФИГ. 40 «порог наклона частоты» 1904 изображен горизонтальной пунктирной линией на отметке -0,15 кГц/с. «Порог возврата наклона частоты» 1906 изображен горизонтальной прерывисто-точечной линией на отметке -0,02 кГц/с. В данном случае набор условий выполнен и набор откликов запускается, когда локальный рассчитанный наклон частоты пересекает «порог наклона частоты», как показано стрелкой 1908, направленной вниз. Набор условий не выполнен (Набор откликов больше не запускается), когда локальный рассчитанный наклон частоты пересекает «порог возврата наклона частоты», как показано стрелкой 1910, направленной вверх. Обратите внимание, что без использования «порога возврата наклона частоты» в данном случае набор откликов не был бы запущен, когда локальный наклон частоты снова пересек горизонтальную пунктирную линию 1904 примерно через 4,7 секунды, как показано в точке пересечения 1911.
На ФИГ. 41 представлен комбинированный график 1920 работы в импульсном режиме одного из вариантов ультразвукового инструмента на фрагменте сонной артерии, показывающий кривую зависимости нормированных мощности, тока, энергии и частоты от времени.
На ФИГ. 42A представлено графическое изображение 1921 кривой зависимости сопротивления от времени 1922 и кривой зависимости тока от времени 1924 для одного из вариантов генератора в процессе выполнения последовательных разрезов на ткани за период времени. Сопротивление (Ом) и ток (мА) отображены по вертикальной оси, а время (с) - по горизонтальной.
На ФИГ. 42B представлено графическое изображение 1923 зависимости частоты от времени 1925 в одном из вариантов, генератора при выполнении последовательных разрезов ткани за период времени. Частота (кГц) показана по вертикальной оси, а время (с) - по горизонтальной оси.
На ФИГ. 42C представлено графическое изображение 1930 кривых зависимости мощности 1926, энергии 1927, первой температуры 1928 и второй температуры 1929 от времени в одном из вариантов, генератора при выполнении последовательных разрезов ткани за период времени. Мощность (Вт), энергия (Дж) и температура (°C) отображены по вертикальной оси, время (с) - по горизонтальной.
На ФИГ. 42A-C отображено применение ультразвукового инструмента, работающего в импульсном режиме, для воздействия на фрагмент сонной артерии, где Время первого импульса равно 1 секунде, а амплитуда первого импульса составляет 100% выходного тока при уровне мощности 3. Время второго импульса составляет 1,5 секунды, амплитуда второго импульса составляет менее 10% выходного тока при уровне мощности 3. Примечательно, что кривая резонансной частоты 1925 демонстрирует отрезки нагревания и (тепловой поток направлен к лезвию) и охлаждения (тепловой поток направлен от лезвия). Параметр «минимальное время фиксации», понимаемый здесь как минимальный отрезок времени, необходимый для запуска отклика (откликов) на набор условий X, служит для поддержания запуска набора условий в ходе работы в импульсном режиме (в одном из примеров время фиксации может составлять примерно 1 секунду). Также стоит отметить, как показано на ФИГ. 42A, что кривая нагрузки или сопротивления 1922 не опускается ниже отметки 200 Ом на протяжении всего процесса. Это может быть благоприятным условием, учитывая, что кривая сопротивления 1922 для маршевого метода работы падает ниже отметки примерно 150 Ом в холостом режиме между разрезами и предполагая использование предельного значения сопротивления для повторной установки наборов условий. В одном из аспектов это предельное значение сопротивления может использоваться для реализации концепции «малая мощность в холостом режиме», описанной в патенте США № 5 026 387 to Thomas.
На ФИГ. 43 представлено графическое изображение1932 кривой рассчитанного наклона частоты 1934 при импульсной работе, отображенной на ФИГ. 41 и ФИГ. 42A-C, в общем виде. На ФИГ. 44 представлен укрупненный вид графического изображения кривой рассчитанного наклона частоты 1934 при импульсной работе, отображенной на ФИГ. 43. На ФИГ. 43 и 44 изображена кривая рассчитанного наклона частоты 1934 при импульсной работе, изображенная на ФИГ. 41 и ФИГ. 42A-C. Наклон частоты (кГц/с) отображен по вертикальной оси, а время (с) - по горизонтальной оси. Представлены две шкалы. На ФИГ. 43 наклон частоты показан грубо, на ФИГ. 44 показан его укрупненный вид. Для наклона частоты одинаковые тренды, наблюдаемые при постоянном приводе, показаны в импульсном режиме, в том числе величины, хорошо коррелирующие с тепловым потоком, направленным к лезвию (отрицательный наклон частоты) и от него (положительный наклон частоты). Неустойчивый характер кривой частоты и кривой наклона частоты, обусловленный импульсным режимом и расчетом скользящего среднего наклона частоты, затрудняет использование кривой частоты во время работы в импульсном режиме. Примечание: отделение ткани происходит через 13 секунд. Как видно из ФИГ. 43 и особенно из ФИГ.44, скорость охлаждения может использоваться для запуска отклика, связывающего быстрое охлаждение во время перерывов выходного импульсного сигнала с завершением рассечения ткани, с использованием логических схем (логические схемы на ФИГ. 20-22 не показаны), когда кривая наклона частоты 1934 превышает пороговое значение, в данном случае составляющее примерно 0,04 кГц/с, когда сигнал дискретизируется в конце (т.е., заданных областей) каждого периода перерыва. Как видно из ФИГ. 42A, кривая сопротивления 1922 может использоваться для запуска отклика, связывающего высокое сопротивление (высокое сопротивление механическому движению или вибрации) с завершением рассечения ткани с использованием логических схем (которые также не показаны в логических схемах на ФИГ. 20-22), где кривая сопротивления датчика 1922 превышает пороговое значение, в данном случае равное примерно 700 Ом при дискретизации в начале (т.е., заданных областей) периодов перерыва в сигнале.
На ФИГ. 45 представлено графическое изображение1936 кривых других данных 1938, представляющих интерес, - сопротивления, мощности, энергии, температуры. На ФИГ.45 вертикальная шкала справа относится только к кривой сопротивления.
Сейчас в настоящем документе будут рассмотрены факторы, которые следует учитывать в контексте уровня мощности и специфики силы зажима ультразвукового инструмента. Скорость нагревания граничащих поверхностей лезвия и пластины пропорциональна смещению лезвия, граничному коэффициенту трения и нагрузки (сила зажима или нормальная сила). Для оценки алгоритма ткани при различных смещениях (уровнях мощности) и специфических для каждого устройства комбинациях силы зажима и коэффициента трения (которые в большой степени зависят от материала пластины и покрытия лезвия) были проведены испытания.
На ФИГ. 46 представлено графическое изображение 1940 сводных данных зависимости взвешенного наклона частоты от уровня мощности для различных типов ультразвуковых инструментов. Взвешенный наклон частоты (кГц/с) отображен по вертикальной оси, а уровень мощности, тип устройства и устройство - по горизонтальной. Инструменты, используемые для генерирования данных, сводная информация по которым представлена на графическом изображении 1940, обычно находятся в серийном производстве за некоторыми исключениями. Одна из тестовых процедур включала в себя зажим устройства, приведение устройства в действие на три секунды и расчет среднего наклона частоты за полные три секунды. Вместе с тем, могут использоваться и другие контрольные показатели. Для большинства устройств данные, обобщенные на ФИГ. 46, являются показательными с точки зрения минимального значения наклона частоты. На ФИГ. 46 представлены обобщенные данные по наклону частоты при испытаниях ультразвукового инструмента типа «ножницы», когда зажим инструментов был закрыт, затем инструменты были приведены в действие на три секунды, затем зажим был открыт. Был рассчитан средний наклон частоты за полные три секунды и графически изображен, как показано на фигуре.
На основе проведенных испытаний и данных испытаний, приведенных на ФИГ.46, для основных уровней мощности, применяемых при работе с некоторыми ультразвуковыми инструментами, предлагаются следующие пороговые значения наклона частоты:
(1) порог наклона частоты для уровня 5: -0,060 кГц/с;
(2) порог наклона частоты для уровня 3: -0,045 кГц/с;
(3) порог наклона частоты для уровня 5: -0,070 кГц/с; и
(4) порог наклона частоты для уровня 3: -0,050 кГц/с.
Устойчивость системы определяется жесткостью лезвия (заделанный один конец) и жесткостью пластины/температурной устойчивостью пластины. Чем сильнее разница между устойчивостью системы без нагрузки (ткань отсутствует) и устойчивостью системы при нагрузке (в зажиме присутствует ткань), тем более устойчиво работает алгоритм ткани. Другие ограничивающие условия, безусловно, могут ограничивать устойчивость системы.
Дальнейшее изучение эффектов смещения включало анализ на основе более широкого набора данных. Для ультразвуковой системы уровни мощности существенно дифференцированы при помощи заданных значений выходного тока и тока, который пропорционален амплитуде вибрации или смещению. Анализ этих данных также может включать в себя цифровое сглаживание данных частоты для получения пригодных для использования кривых наклона частоты.
На ФИГ. 47-49 изображены кривые зависимости частоты и тока от времени, полученные с использованием одного из вариантов генератора и ультразвукового инструмента для отделения свиной сонной артерии при уровне мощности 5.
На ФИГ. 47 представлено графическое изображение 1970 кривой зависимости резонансной частоты от времени 1972, кривой зависимости усредненной резонансной частоты от времени 1974 и кривой зависимости наклона частоты от времени 1976 в одном из вариантов, генератора. Частота (кГц) и наклон частоты (кГц/с) отображены по вертикальной оси, а время (с) - по горизонтальной. Кривая наклона частоты 1976 построена на основе усредненных данных частоты и была получена путем последующей обработки данных кривой частоты 1972. Необработанная частотная информация преобразуется в график так же, как и сглаженная (при помощи простого скользящего среднего) частотная информация и наклон частоты (рассчитанный с использованием сглаженной информации, поскольку первичная частотная информация является ступенчатой в силу округления передаваемых данных). Кривая средней резонансной частоты 1974 получена с помощью скользящего среднего (кГц) данных резонансной частоты за 70 мс.
На ФИГ. 48 представлен укрупненный вид 1978 кривой зависимости резонансной частоты от времени 1972 и кривой зависимости усредненной резонансной частоты от времени 1974 для одного из вариантов генератора. Частота (кГц) показана по вертикальной оси, а время (с) - по горизонтальной оси.
На ФИГ.49 представлен укрупненный вид 1980 кривой зависимости резонансной частоты от времени 1972 и кривой зависимости тока от времени 1982 для одного из вариантов генератора. Частота (Гц) и ток (А) отображены по вертикальным осям.
На ФИГ. 48 и 49 соответствующие укрупненные виды 1978, 1980 изображены для демонстрации эффекта сглаживания частотных данных и подъема величин в начале процедуры, которые могут быть полезны для оценки таких параметров, как Время ожидания.
Другие аспекты алгоритма ткани, описанные в настоящем документе, могут применяться в ситуациях, когда остается мало или не остается ткани (между ультразвуковым лезвием и зажимом), и в концевой зажим поступает лишняя энергия. Таким образом, в одном из вариантов, алгоритм ткани может быть изменен для обеспечения обратной связи пользователю касательно такой ситуации. Алгоритм ткани особенно использует тот факт, что резонанс ультразвукового лезвия изменяется относительно температуры (уменьшается при увеличении температуры и увеличивается при уменьшении температуры).
В одной из модификаций алгоритм ткани, описанный в настоящем документе, может использоваться для отслеживания наклона частоты кривой, где алгоритм отслеживает изменение в наклоне резонансной частоты и указывает на изменяющееся состояние ткани. В случае, проиллюстрированном на ФИГ. 50, например, изгиб кривой частотного отклика связан с точкой, в которой начинается отделение ткани (т.е., существует маркер ткани и пользователь продолжает активировать инструмент), что может быть экспериментально подтверждено. Изменение частоты наклона может использоваться для обеспечения визуальной, звуковой (или) тактильной обратной связи (например, отчетливого звукового звукового пикающего сигнала, мигающей лампочки, тактильной вибрации и прочих видов обратной связи, обсуждавшихся ранее) пользователю (о том, что в концевой зажим поступает лишняя энергия) либо может осуществляться управление выходным сигналом генератора или выходной сигнал может быть остановлен.
В другой модификации алгоритм ткани, описанный в настоящем документе, может использоваться для отслеживания порога частоты кривой, где алгоритм отслеживает изменение частоты, когда кривая пересекает какой-либо порог, или отличие от какого-либо известного состояния (например, комнатной температуры). Как и при отслеживании наклона частоты, когда изменение частоты становится ниже какого-либо порога или разности, пользователю может быть дан сигнал о том, что концевой зажим устройства нагревается с большой скоростью. На ФИГ. 50 представлен иллюстративный графический вид порога частоты.
Еще в одной модификации алгоритм ткани, описанный в настоящем документе, может использоваться для отслеживания изменения наклона частоты и порога частоты в комбинации. Комбинация существенного изменения наклона частоты и падения частоты ниже какого-либо порога может использоваться для оповещения о достижении высокой температуры.
На ФИГ. 50 представлен комбинированный график 1990 нормированных кривых мощности 1991, сопротивления 1992, тока 1993, энергии 1994, частоты 1995 и температуры 1996 в одном из вариантов, генератора, соединенного с ультразвуковым инструментом. Как показано, отделение ткани начинается в момент времени 6,672 секунды. С этого момента и до момента полного отделения ткани частота падает в общем на 55-60%, температура увеличивается примерно в 1,92 раза (с 219°C до 418°C), около 28% общей переданной энергии используется. Кривые зависимости локальных наклонов частоты от времени изображены первым набором пунктирных линий 1997 и отражают быстрое изменение в наклоне резонансной частоты. Отслеживание этого наклона 1997 дает возможность идентифицировать значительное изменение, которое обычно имеет место в случаях, когда воздействие оказывается при малом количестве ткани или при отсутствии ткани вообще, и большая часть энергии поступает на граничащие поверхности лезвия и зажимной пластины. Подобным образом изменение частоты с резонансной при известном состоянии (например, комнатной температуре) может использоваться для идентифицирования высоких температур - порог изменения частоты показан второй пунктирной линией 1998. В дополнение к этому, комбинация этих двух параметров, изменения наклона частоты и порога изменения частоты может использоваться в целях оповещения. Обратите внимание, что в данном случае частота изменяется с первоначальной величины, составляющей 55 712 Гц до конечного значения, составляющего 55 168 Гц при пороге, составляющем 55 400 Гц.
В некоторых описанных в примере вариантах, хирургические условия и/или условия, связанные с инструментом, могут снижать возможность набора условий, описанного выше, точно отражать состояние инструмента. В некоторых ситуациях лезвие может нагреваться более медленно, чем обычно, по причине чего резонансная частота становится более высокой, а наклон частоты более плавным, чем ожидалось. Один из примеров такой ситуации может иметь место, когда ткань касается незажимной поверхности лезвия. В этой и других ситуациях наблюдается более плавный темп нагревания, даже по завершении разреза ткани, когда между лезвием и зажимной пластиной находится минимальное количество ткани или ткань отсутствует вовсе. Это, в свою очередь, может привести к задержке выполнения различных наборов условий, зависящих от сравнения локального наклона частоты с пороговым значением наклона частоты и/или сравнения локальной резонансной частоты с пороговым значением частоты. В результате набор откликов, реализующий звуковые сигналы, импульсные режимы, отключение тока и т.д. может задерживаться без необходимости.
На ФИГ. 51A и 51B представлены графические изображения резонансной частоты и наклона частоты соответственно одного из вариантов ультразвукового инструмента во время ультразвукового разрезания ткани. Разрез, проиллюстрированный на ФИГ. 51A и 51B привел к постепенному нагреванию лезвия ультразвукового инструмента. На ФИГ. 51A представлен график, отображающий время по горизонтальной оси 2100 и резонансную частоту лезвия по вертикальной оси 2104. График 2105 иллюстрирует резонансную частоту лезвия за какое-то время. На ФИГ. 51B представлен график, отображающий время по горизонтальной оси 2104 и наклон частоты по вертикальной оси 2106. График 2107 иллюстрирует наклон частоты за какое-то время. При разрезе, проиллюстрированном на ФИГ. 51A и 51B, отделение ткани произошло между 2 и 3 секундами. Отделение ткани привело к небольшому изменению в резонансной частоте, отмеченному номером 2108, и пологому минимуму наклона частоты, отмеченному номером 2100. Однако характеристики сигнала 2108, 2110 могут быть недостаточными для своевременного запуска набора условий, требующего падения наклона частоты ниже порогового значения наклона частоты и/или требующего падения резонансной частоты ниже порогового значения частоты.
На ФИГ. 52A и 52B представлены графические изображения резонансной частоты и наклона частоты соответственно, проявленных одним из вариантов ультразвукового инструмента во время еще одного ультразвукового разрезания ткани. Проиллюстрированное разрезание ткани привело к постепенному нагреву лезвия ультразвукового инструмента. На графике 2112 показана зависимость резонансной частоты от времени при разрезании ткани, проиллюстрированном на ФИГ. 52A-52B, на графике 2114 - зависимость наклона частоты от времени при разрезании ткани, проиллюстрированном на ФИГ. 52A-52B. В проиллюстрированном случае разрезания ткани отделение ткани от лезвия началось между пятой и седьмой секундами, а маркер ткани полностью отделился от лезвия в момент времени примерно девять секунд. Как видно, отделение ткани привело к небольшому изменению в резонансной частоте, начиная с отметки 2116, и малому минимуму наклона частоты, отмеченному номером 2118. Однако в силу медленного нагревания лезвия характеристики сигнала 2116, 2118 могут быть недостаточными для запуска желаемого набора условий.
В определенных вариантах, такие генераторы, как 30, 500, 1002 и/или такие ультразвуковые хирургические инструменты, как 100, 120, 1004 могут реализовываться с одним или более наборов условий, которые учитывают динамическую предельную частоту. Эти и иные наборы условий, описанные в настоящем документе, могут активироваться врачом после получения входного сигнала от переключателя, кнопки или педали или, в некоторых вариантах, выполняются в фоновом режиме, пока выполняются другие алгоритмы (например, алгоритмы управления инструментом). Например, базовая резонансная частота может фиксироваться, когда ультразвуковое сопротивление превышает пороговое сопротивление. Например, превышение порогового сопротивления может означать, что зажимной рычаг сомкнут (например, начинается разрезание ткани). Один или более наборов условий может включать в себя условие предельной базовой частоты, которое выполняется, когда резонансная частота лезвия отличается от базовой частоты более, чем на пороговый параметр базового отклонения. В определенных вариантах, условие предельной базовой частоты выполняется, даже когда остальные условия, зависящие от резонансной частоты или наклона частоты, не выполняются. При использовании в логической схеме элемента «Или» с другими условиями, условия предельной базовой частоты могут позволять запуск определенных пар наборов условий и откликов в таких ситуациях, как были описаны выше, когда нагревание лезвия происходит более плавно, чем обычно.
На ФИГ. 53 представлена логическая схема одного из вариантов алгоритма ткани 2120, выполняющего условие предельной базовой частоты, которое может быть выполнено в одном из вариантов, генератора для учета базовой резонансной частоты ультразвукового лезвия. На этапе 2122 начинается активация лезвия. Например, генератор может активироваться при определенном уровне мощности, обозначенном «N.» Дополнительно на этапе 2124 генератор может находиться в ожидании в течение порогового периода времени. Пороговый период времени может быть достаточным для рассеивания любой частоты и других переходных величин, наблюдаемых после активации. Например, на ФИГ. 54A и 54B представлены графические изображения частоты лезвия при различных примерах запуска с помощью ультразвука. На графике 2136 изображена кривая зависимости частоты от времени при первой активациии, описанной в примере, и демонстрирует переходную частотную характеристику или импульс в области 2140. На графике 2138 изображена кривая зависимости частоты от времени при второй активациии, описанной примере, и демонстрирует переходную частотную характеристику или импульс в области 2142.
Возвращаясь к блоку 2124, алгоритм 2120 может использовать любой подходящий пороговый период времени, который перекрывает период рассеивания всех или большинства переходных сигналов или импульсов. Например, в некоторых вариантах, пороговый период времени может составлять от 0,1 до 1,0 секунды. В некоторых описанных в примере вариантах, пороговый период времени может составлять от 0,2 до 0,5 секунды. В одном описанном в примере варианте пороговый период времени может составлять около 0,2 секунды. На этапе 2126 генератор может получить сведения об ультразвуковом сопротивлении. В различных описанных в примере вариантах, ультразвуковое сопротивление отражает электрическое сопротивление системы лезвия датчика и/или сопротивление «динамической ветви», как описано ранее в настоящем документе. На этапе 2128 генератор может определить, превышает ли ультразвуковое сопротивление пороговое сопротивление. Это может означать, например, закрытие зажимного рычага либо в контакте с лезвием, либо в контакте с тканью. В некоторых вариантах, генератор на этапе 2128 может не посчитать, что ультразвуковое сопротивление превышает порог, если оно превышает порог в течение заданного времени (периода «времени выше сопротивления»). Период времени выше сопротивления может иметь любое подходящее значение и может находиться в интервале от 10 до 100 мс, в том числе составлять, например, 30 мс.
Если ультразвуковое сопротивление не превышает пороговое сопротивление на этапе 2128 (или не превышает пороговое сопротивление в течение периода «времени выше сопротивления»), генератор может вернуться к этапу 2126 и 2128 и продолжить отслеживание ультразвукового сопротивления, пока оно не превысит пороговое сопротивление. Если ультразвуковое сопротивление превышает пороговое сопротивление на этапе 2128, генератор может зафиксировать локальную резонансную частоту лезвия как базовую частоту на этапе 2130. Пока работа устройства продолжается, генератор может на этапе 2132 определить, превышает ли дельта частоты, или разница между базовой частотой и локальной резонансной частотой лезвия, порог базового отклонения. Если частотный сигнал превышает порог базового отклонения, может выполняться условие предельной базовой частоты. Если выполнение условия предельной базовой частоты приводит к выполнению полного набора условий, на этапе 2134 может запускаться соответствующий набор откликов. В некоторых вариантах, условие предельной базовой частоты не выполняется, пока или если дельта частоты превышает порог базового отклонения в течение периода времени, когда дельта частоты выше порога.
В некоторых экспериментальных вариантах, использование базовой частоты и дельты частоты в соответствии с описанием к алгоритму 2120 также касается проблем, возникающих при хирургических ситуациях, когда резонансная частота ультразвукового лезвия плавает между активациями системы или разрезами. Это может случаться, например, когда ультразвуковое лезвие используется для нескольких разрезов без выключения. На ФИГ. 55 представлено графическое изображение резонансной частоты 2144 и ультразвукового сопротивления 2150 за период времени для одного варианта, в течение которого производились несколько разрезов при помощи ультразвукового лезвия. Каждая характеристика 2147 отражает отдельный захват ткани, разрез или иное воздействие на ткань с использованием ультразвукового лезвия. Из ФИГ. 55 видно, что в начале каждого разреза резонансная частота имеет пиковый характер (например, когда зажим закрывается на ткани). Например, когда зажимной рычаг закрывается на ткани, лезвие может быть приведено в контакт с относительно прохладной тканью. Это может способствовать охлаждению лезвия, что приводит к временно положительному наклону резонансной частоты, как показано. Когда к лезвию направляется ультразвуковая энергия, оно начинает нагреваться, из-за чего происходит уменьшение резонансной частоты с каждым разрезом, как показано на иллюстрации. Обращаясь теперь к ФИГ. 55 касательно алгоритма 2120: ультразвуковое сопротивление может превышать гармонический порог сопротивления в начале каждого разреза 2147, благодаря чему генератор в это время фиксирует базовую частоту. Например, линия 2148 показывает момент времени, когда ультразвуковое сопротивление превысило пороговое сопротивление и была зафиксирована базовая частота.
В определенных вариантах, условие базовой предельной частоты может использоваться в обычном наборе условий с одним или более других условий. На ФИГ. 56 изображена логическая схема алгоритма ткани 2150, которая может выполняться в одном из вариантов, генератора и/или инструмента для выполнения условия базовой предельной частоты в совокупности с другими условиями. На этапе 2152 генератор может рассчитать дельту частоты. Дельта частоты может быть рассчитана как описано ранее, например, в отношении алгоритма 2120. Например, генератор может получить базовую частоту, если ультразвуковое сопротивление превышает порог сопротивления, и найти дельту частоты как разность между локальной резонансной частотой и базовой частотой. На этапе 2154 генератор может применить одно или более других условий. Эти условия могут быть такими же, как описанные ранее касательно ФИГ. 20-22. Другие условия могут включать в себя, например: является ли значение локального наклона частоты меньшим, чем пороговое значение наклона частоты 1404, является ли значение локальной резонансной частоты меньшим, чем пороговое значение частоты, и т.д. Другие условия могут применяться с любой логикой. Например, другие условия могут считаться выполненными, если одно из других условий выполнено (например, логическое ИЛИ), могут считаться выполненными, только если все из других условий выполнены (например, логическое И), и т.д.
Если другие условия выполнены на этапе 2154, набор условий может считаться выполненным, а генератор может запустить соответствующий набор откликов на этапе 2158. Если другие условия не выполнены на этапе 2154, генератор может определить, превышает ли дельта частоты порог базового отклонения на этапе 2156. Если нет, другие условия снова могут быть применены на этапе 2154. Если да, набор условий может считаться выполненным, даже если другие условия не выполнены. Когда набор откликов запускается на этапе 2128, набор откликов может продолжать выполняться, пока параметры для выхода из набора откликов не будут определены как выполненные на этапе 2160, и на этапе 2162 будет осуществлен выход из запущенного условия. Такие параметры могут включать в себя, например, параметр истечения минимального времени фиксации набора условий, превышение наклоном частоты порога возврата наклона частоты, и т.д.
В различных экcпериментальных вариантах, условие базовой предельной частоты может использоваться в контексте логических схем 1200, 1300, 1400 на ФИГ. 20-22, описанных ранее. Например, на ФИГ. 57 представлена логическая схема одного из вариантов части 1300´ алгоритма ткани 1200, показанного на ФИГ. 20, отвечающей за оценку сигнала с учетом условия предельной базовой частоты. Алгоритм 1300´ может выполняться таким же образом, как алгоритм 1300, описанный ранее в настоящем документе. На этапе 2164 генератор может определить, установлена ли метка для отслеживания нагрузки для данного набора условий X. В некоторых вариантах, описанных в примере, метка мониторинга нагрузки 2167 может означать, необходимо ли учитывать условие предельной частоты.
Если метка отслеживания нагрузки 2167 не установлена, дельта частоты может быть установлена на ноль (например, дельта частоты, равная нулю, может никогда не превысить порог базового отклонения, позволяя алгоритму 1300´ работать таким же образом, как работает алгоритм 1300). Если метка отслеживания нагрузки 2167 установлена, генератор может выполнять алгоритм отслеживания нагрузки 2166, который может получать в качестве входного сигнала метку поддержания состояния 2168. Метка поддержания состояния может сообщать генератору, нужно ли использовать пороговый период времени ожидания перед анализом ультразвукового сопротивления в целях избежания переходных характеристик или импульсов, проиллюстрированных в ФИГ. 54A, 54B.
Алгоритм отслеживания нагрузки 2166 может выдавать значение дельты частоты. Дополнительная информация о выдаче значений дельты частоты алгоритмом отслеживания нагрузки представлена в настоящем документе далее в описании к ФИГ. 58. Возвращаясь к ФИГ. 57: на этапе 2172 генератор может рассчитать наклон между двумя или более замерами резонансной частоты и может использовать подходящее усреднение и/или сглаживание, как описано ранее в настоящем документе. Входные данные на этапе 2172 могут включать в себя замер входящей резонансной частоты 2174 (Ft) и замер входящего ультразвукового сопротивления 2176

На ФИГ. 58 представлена логическая схема одного из вариантов алгоритма отслеживания нагрузки 2166, который может выполняться в одном из вариантов, генератора. Алгоритм отслеживания нагрузки 2166 может принимать в качестве входных данных локальное ультразвуковое сопротивление
На этапе 2190 генератор может определить, превышает ли значение таймера нагрузки время свыше порогового сопротивления 2188. Если да, генератор может определить, выполнена ли фиксация состояния базовой частоты на этапе 2194. Фиксация состояния базовой частоты может предотвратить колебания базовой частоты во время закрытия браншей, на что указывает ультразвуковое сопротивление. Например, если фиксация состояния базовой частоты выполнена, это может означать, что базовая частота уже была учтена для данной нагрузки. Если фиксация состояния базовой частоты не выполнена, генератор может выполнить фиксацию и задать базовую частоту как текущую резонансную частоту системы на этапе 2196. На этапе 2206 генератор может снова определить, выполнена ли фиксация состояния базовой частоты. Если да, дельта частоты может быть установлена на значение базовой частоты за вычетом локальной резонансной частоты на этапе 2208. Если фиксация базы не выполнена, на этапе 2210 может быть задано нулевое значение дельты частоты.
Возвращаясь к этапу 2184, если ультразвуковое сопротивление не превышает пороговое сопротивление, генератор может заново установить таймер нагрузки на этапе 2198. На этапе 2202 генератор может определить, является значение ли ультразвукового сопротивления меньшим, чем заданное заново пороговое сопротивление (

На ФИГ. 59 представлена логическая схема 1400´ для оценки наборов условий для алгоритма ткани оценки сигнала 1300´, показанного на ФИГ. 57, который может использоваться в одном из вариантов, генератора. На этапе 2212 генератор может использовать логику для определения, выполнен ли нефильтрованный набор условий для оцененного набора условий. Логическая схема 2212 описана более подробно далее касательно ФИГ. 60 и может выдавать ответ «истинно» или «ложно». На этапе 2214 генератор может определить, выполнена ли фиксация отфильтрованного набора условий. Фиксация отфильтрованного набора условий может быть выполнена, как описано далее, когда выполнен фильтрованный набор условий, например, для сообщения о том, что для порогового периода времени установлен фильтрованный набор условий. Если фиксация отфильтрованного набора условий выполнена, генератор может увеличить таймер фиксации на этапе 2218 и определить, выполнен ли нефильтрованный набор условий на этапе 2220. Если неотфильтрованный набор условий выполнен, тогда логическая схема 1400´ может выдать сообщение о том, что фильтрованный набор условий выполнен.
Если нефильтрованный набор условий не выполнен на этапе 2220, генератор может оценить, выполнен ли набор условий на этапе 2222. Например, генератор может определить, (i) превысил ли таймер фиксации фильтрованного набора условий таймер минимальной фиксации 1422; (ii), превышает ли наклон частоты порог возврата наклона частоты 1424; и iii) {[отключено ли отслеживание нагрузки 2167 ИЛИ закончен ли сеанс нагрузки] (например, является ли значением ультразвукового сопротивления меньшим, чем заданный заново порог сопротивления 2228). Если данные условия выполняются, генератор может на этапе 2224 снять фиксацию отфильтрованного набора условий; повторно установить таймер устранения ложных контактов (например, ТАЙМЕР X на ФИГ. 22); повторно установить таймер фиксации; повторно установить таймер нагрузки (например, период времени свыше сопротивления), заново выполнить фиксацию состояния базовой частоты; и установить значение дельты частоты, равное нулю. Логическая схема 1400´ может выдавать сообщение о том, что фильтрованный набор условий не выполнен.
Обращаясь сейчас к этапу 2214: если фиксация отфильтрованного набора условий не выполнена, генератор может определить, выполнен ли набор отфильтрованных условий на этапе 2216 (например, на основании данных, полученных на этапе 2212). Если нет, таймер устранения ложного контакта может быть установлен повторно на этапе 1410, и логическая схема 1400´ может выдать сообщение о том, что фильтрованный набор условий не выполнен. Если да, генератор может увеличить значение таймера устранения ложного контакта на этапе 1408. На этапе 1414 генератор может определить, превышает ли значение таймера устранения ложного контакта параметр «необходимое время перед запуском» 1412, как описано ранее. Если да, алгоритм 1400´ может следовать по ветке ДА, фиксируя состояние фильтрованного набора условий на этапе 1416 и выдавая сообщение о том, что фильтрованный набор условий выполнен.
На ФИГ. 60 представлена логическая схема для выполнения одного варианта логического блока нефильтрованных условий 2212, показанного на ФИГ. 59, который может выполняться в одном из вариантов, генератора. На этапе 2232 генератор может опрeделить, является ли значение локального наклона частоты меньшим, чем параметр порога наклона частоты 1404. в некоторых вариантах, пороговый параметр наклона частоты может зависеть от уровня мощности, выдаваемой генератором, как описано ранее. Если локальный наклон частоты меньше, чем пороговый параметр наклона частоты 1404, генератор может на этапе 2236 определить, является ли значение локальной резонансной частоты меньшим, чем пороговое значение частоты 1406. Если да, алгоритм 2212 может выдать сообщение о том, что нефильтрованный набор условий выполнен. В некоторых вариантах, условия 2232, 2236 могут выполняться в виде логической операции «ИЛИ» вместо описанной в примере операции «И». Например, определив, что локальный наклон частоты меньше, чем пороговый параметр наклона частоты 1404, алгоритм может выдать сообщение о том, что нефильтрованный набор условий выполнен. Точно так же определив, что локальный наклон частоты не меньше, чем пороговый параметр наклона частоты 1404, алгоритм может оценить резонансную частоту и пороговый параметр частоты 1406 на этапе 2236.
Если условия, оцененные на этапах 2232 и 2236, не выполнены (в любой используемой логической схеме), генератор может определить на этапе 2240, превышает ли разница между базовой частотой (например, установленной на этапе 2196) и локальной резонансной частотой (например, дельтой частоты) пороговый параметр базового отклонения 2242. Если да, алгоритм 2212 может выдать сообщение о том, что нефильтрованный набор условий выполнен. Если нет, алгоритм 2212 может выдать сообщение о том, что нефильтрованный набор условий не выполнен.
В определенных вариантах, такие генераторы, как 30, 500, 1002 и/или такие ультразвуковые хирургические инструменты, как 100, 120, 1004 могут использоваться с одним или более наборов условий, использующих сеансы нагрузки для подготовки запуска набора откликов. Например, генератор может идентифицировать сеансы нагрузки, как описано в настоящем документе. Сеанс нагрузки может состояться, например, когда нагрузка на ультразвуковое лезвие подвергается изменению (например, внезапному или быстрому изменению). Физические условия, которые могут вызвать изменение в нагрузке, включают в себя, например, открытие и/или закрытие зажимов, внезапный провал ультразвукового лезвия сквозь ткань, и т.д. В различных вариантах, при обнаружении присутствия нагрузки, могут быть подготовлены триггеры набора откликов либо существует возможность его запуска при выполнении других условий соответствующего набора условий. Когда присутствие нагрузки не обнаружено, триггеры набора откликов могут быть переведены в дежурный режим. Также может отсутствовать возможность его запуска даже при выполнении других условий соответствующего набора условий. Существование нагрузки может служить дополнительным индикатором типов физических состояний, определяемых при помощи различных наборов условий (например, изменения в состоянии ткани, такие как отделение ткани, обезвоживание и т.д.). Таким образом, наборы условий, использующие триггеры присутствия нагрузки, с меньшей вероятностью выдают ложные положительные ответы (например, ситуации, когда набор условий выполнен, но основополагающее физическое состояние отсутствует). В результате наборы условий, использующие присутствие нагрузки также могут использовать более низкие и чувствительные пороги наклона частоты 1404, пороги частоты 1406, и т.д.
В различных вариантах, присутствие нагрузки может быть обнаружено путем проверки наличия изменений наклона частоты с течением времени. На ФИГ. 61 представлено графическое изображение наклона частоты 2302 и вторая производная частоты по времени 2304 для ультразвукового лезвия, которое иллюстрирует пару сеансов нагрузки. Присутствие нагрузки очевидно на графике наклона частоты 2302 на участках 2305 и 2306 и на графике второй производной по времени 2304 на участках 2307 и 2308. Лезвие, сгенерировавшее характеристики, проиллюстрированные на ФИГ. 61, было активировано без нагрузки в момент времени ½ секунды, сомкнуто в момент времени 1½ секунды и разомкнуто в момент времени 3½ секунды, как показано на горизонтальной оси. Закрытие и раскрытие может соответствовать сеансам нагрузки, отмеченным номерами 2305, 2307 и 2306, 2308. Следует понимать, что сам наклон частоты может испытывать влияние и температурных событий (например, изменений температуры лезвия), и присутствия нагрузки. Это видно из ФИГ. 61, где график наклона частоты 2302 отображает различные изменения в дополнение к участкам 2305, 2306. Наоборот, график второй производной по времени 2304 является практически постоянным за исключением существенных перепадов на участках 2307, 2308.
Ввиду этого определенные варианты идентифицируют наличие нагрузки путем проверки изменений наклона частоты при прокрутке окна. Например, текущий или локальный наклон частоты сравнивается с предыдущей задержкой, вызванной процессом регулирования, с помощью времени задержки при прокрутке окна. Цепочка результатов сравнения может считаться скользящей дельтой. Время прокрутки окна может составлять любую подходящую величину и в определенных вариантах, может быть равно около 100 мс. Когда скользящая дельта превышает пороговый параметр наклона частоты, может быть обнаружено присутствие нагрузки. В определенных вариантах, начало сеанса нагрузки, когда лезвие не испытывает нагрузку, может не учитываться (например, триггеры набора откликов могут быть не подготовлены к запуску). Например, перед проверкой наклона частоты при прокрутке окна генератор может сначала обнаружить увеличение ультразвукового сопротивления, поднявшегося выше порогового значения сопротивления (в некоторых вариантах, порог сопротивления должен удерживаться в течение времени выше порогового значения сопротивления, перед тем как генератор обнаружит наличие нагрузки.) Порог сопротивления может иметь любое подходящее значение и в некоторых вариантах, находится в пределах 5-260 Ом при разрешении 5 Ом. В одном из описанных в примере вариантов порог сопротивления составляет около 100 Ом. Увеличение ультразвукового сопротивления до значения выше порогового может означать, например, что зажимы сомкнуты, тем самым увеличивая вероятность присутствия нагрузки.
На ФИГ. 62 представлено графическое изображение наклона частоты 2310, второй производной частоты по времени 2312 и скользящей дельты 2314, показывающей присутствие нагрузки. Перепад 2316 графика скользящей дельты 2314 указывает, что скользящая дельта превысила пороговое значение наклона частоты, что свидетельствует о наличии нагрузки. На ФИГ. 63 представлено графическое изображение еще одного варианта наклона частоты 2318, второй производной частоты по времени 2320 и скользящей дельты 2322, свидетельствующей еще об одном проявлении нагрузки. Точка 2324 на графике скользящей дельты 2322, точка 2326 на графике второй производной 2320 и точка 2328 на графике наклона частоты 2328 свидетельствуют о наличии нагрузки.
На ФИГ. 64 представлена логическая схема для выполнения одного из вариантов алгоритма 2330, применяющего набор условий, в том числе триггер присутствия нагрузки, который может использоваться в одном из вариантов, генератора. На этапе 2332 генератор может определить, присутствует ли нагрузка. Дальнейшие примеры того, как генератор может определять наличие нагрузки, приведены в настоящем документе в описании к ФИГ. 65. Если нагрузка отсутствует, генератор может продолжить проверку наличия нагрузки на этапе 2332. Если нагрузка присутствует, генератор может подготовить к запуску соответствующий набор откликов на этапе 2334. Подготовка набора откликов может включать в себя включение механизма запуска набора откликов, когда выполнен соответствующий набор условий. На этапе 2336 генератор может определить, является ли значение локального ультразвукового сопротивления меньшим, чем пороговое значение перезагрузки сопротивления. Пороговое значение перезагрузки сопротивления может быть равным уровню сопротивления, при котором генератор заключает, что сеанс нагрузки завершен. Если локальное ультразвуковое сопротивление ниже заново заданного порогового значения сопротивления, генератор может перевести набор откликов в режим ожидания на этапе 2342. Если локальное ультразвуковое сопротивление не ниже заново заданного порогового значения сопротивления, генератор (например, 30, 500, 1002) может определить, выполнены ли параметры набора условий на этапе 2338. Если набор условий выполнен, генератор может запустить соответствующий набор откликов на этапе 2340.
На ФИГ. 65 представлена логическая схема для выполнения одного варианта алгоритма 2332, служащего для определения, присутствует ли в хирургическом инструменте условие нагрузки. На этапе 2342 генератор может определить, превышает ли локальное ультразвуковое сопротивление ультразвукового лезвия/системы датчика порог сопротивления. Например, если ультразвуковое сопротивление превышает порог, это может означать, что зажимы сомкнуты. Если нет, алгоритм 2332 может выдать сообщение о том, что нагрузка отсутствует, на этапе 2334. Если локальное ультразвуковое сопротивление превышает порог сопротивления, генератор может определить на этапе 2346, превышает ли скользящая дельта частоты пороговое значение наклона частоты. Если да, алгоритм 2332 может выдать сообщение о присутствии нагрузки 2348. Если нет, алгоритм 2344 может выдать информацию об отсутствии нагрузки.
В различных вариантах, описанных в примере, наборы условий, использующие сеансы нагрузки для подготовки триггеров запуска набора откликов могут использоваться в контексте логических схем 1200, 1300, 1400, представленных ранее в описании ФИГ. 20-22. Например, на ФИГ. 66 представлена логическая схема одного из вариантов отвечающей за оценку сигнала части 1300´´ алгоритма ткани 1200, показанного на ФИГ. 20, с учетом набора условий, в котором используется присутствие нагрузки для подготовки запуска набора откликов. В различных вариантах, алгоритм ткани оценки сигнала 1300´´ может работать таким же образом, как алгоритм 1300, описанный ранее, с несколькими отличиями. Например, в алгоритме 1300´´ функция Оценки сигнала/Отслеживания 1308 может выполняться до сравнения с временем ожидания на этапе 1306. Однако следует понимать, что данные действия могут быть выстроены в любом порядке, подходящем для любого из алгоритмов 1300, 1300´, 1300´´, описанных в настоящем документе. В дополнение к этому, функция Оценки сигнала/Отслеживания 1308 может также снимать значение локального ультразвукового сопротивления

На ФИГ. 67 представлена логическая схема алгоритма 1400´´ для оценки наборов условий для алгоритма ткани оценки сигнала 1300´´, показанного на ФИГ. 66, который может использоваться в одном из вариантов, генератора. На этапе 2352 генератор может определить, установлена ли метка поддержания состояния 2354. Если нет, набор откликов, соответствующий набору условий алгоритма 1400´´ может быть подготовлен к запуску на этапе 2358. В определенных вариантах, подготовка к запуску набора откликов 2358 может отключить отслеживание нагрузки. Если метка поддержания статуса 2354 установлена, алгоритм отслеживания нагрузки 2356 может быть выполнен. Алгоритм отслеживания нагрузки 2356 может либо подготовить, либо не подготовить триггер набора откликов в зависимости от того, обнаружено присутствие нагрузки. Дополнительная информация об алгоритме отслеживания нагрузки 2356 приведена ниже в описании ФИГ. 68. На этапе 2360 генератор может использовать логику для определения, выполнен ли нефильтрованный набор условий для оцененного набора условий. Логическая операция 2360 описана более подробно далее касательно ФИГ. 69 и может выдавать ответ «истинно» или «ложно».
На этапе 2368 генератор может определить, установлена ли блокировка отфильтрованного набора условий. Блокировка отфильтрованного набора условий может быть установлена, как описано далее, когда выполнен фильтрованный набор условий, например, для выдачи сообщения о том, что для порогового периода времени установлен фильтрованный набор условий. Если фиксация отфильтрованного набора условий выполнена, генератор может увеличить значение таймера фиксации на этапе 2365 и определить, выполнен ли нефильтрованный набор условий на этапе 2366. Если нефильтрованный набор условий выполнен, тогда логическая схема 1400´´ может выдать сообщение о том, что фильтрованный набор условий выполнен.
Если нефильтрованный набор условий не выполнен на этапе 2366, генератор может оценить, выполнен ли набор условий, на этапе 2368. Например, генератор может определить, (i) превысил ли таймер фиксации состояния фильтрованного набора условий таймер минимальной фиксации состояния 1422; (ii) превышает ли наклон частоты порог возврата наклона частоты 1424. Если данные условия выполняются, генератор может на этапе 2378 снять фиксацию отфильтрованного набора условий; заново установить таймер устранения ложных контактов (например, ТАЙМЕР X на ФИГ. 22); заново установить таймер блокировки; заново установить таймер нагрузки (например, время свыше периода сопротивления), и перевести в режим ожидания триггер набора откликов. Логическая схема 1400´´ может выдавать сообщение о том, что фильтрованный набор условий не выполнен.
Обращаясь сейчас к этапу 2362: если фиксация отфильтрованного набора условий не выполнена, генератор может определить, выполнен ли набор неотфильтрованных условий на этапе 2364 (например, на основании данных, полученных на этапе 2360). Если нет, таймер устранения ложного контакта может быть повторно установлен на этапе 1410, и логическая схема 1400´´ может выдать сообщение о том, что фильтрованный набор условий не выполнен. Если да, генератор может увеличить значение таймера устранения ложного контакта на этапе 1408. На этапе 1414 генератор может определить, превышает ли значение таймера устранения ложного контакта параметр «необходимое время перед запуском» 1412, как описано ранее. Если да, алгоритм 1400´´ может следовать по ветке ДА, фиксируя состояние фильтрованного набора условий на этапе 1416 и выдавая сообщение о том, что фильтрованный набор условий выполнен.
На ФИГ. 68 представлена логическая схема одного из вариантов алгоритма мониторинга нагрузки 2356, который может выполняться в одном из вариантов, генератора, как показано на ФИГ. 67. Алгоритм отслеживания нагрузки 2356 может получать в качестве входных данных локальное ультразвуковое сопротивление
На этапе 2384 генератор может определить, превышает ли значение таймера нагрузки необходимый параметр времени, в течение которого порог превышен 2386. Если да, генератор может подготовить к запуску триггер нагрузки на этапе 2396 и перейти к этапу 2398. Например, триггер загрузки может быть подготовлен к запуску, когда нагрузка обнаружена при помощи ультразвукового сопротивления. Если нет, на этапе 2384 генератор может перейти непосредственно к этапу 2398 без подготовки к запуску триггера нагрузки. На этапе 2398 генератор может определить, подготовлен ли к запуску триггер нагрузки. Если нет, алгоритм отслеживания установки нагрузки 2356 может выдать данные при неподготовленных к запуску триггерах нагрузки и набора откликов. Если да, генератор может определить на этапе 2400, превышает ли скользящая дельта пороговый параметр наклона частоты 2402. Если нет, алгоритм 2356 может выдать данные при установленной нагрузке и неподготовленном к запуску триггере набора откликов. Если да, триггер набора откликов может быть подготовлен на этапе 2404, а алгоритм 2356 может возвратиться в исходное состояние. Возвращаясь к этапу 2380: если ультразвуковое сопротивление не превышает пороговое сопротивление, генератор может заново установить таймер нагрузки на этапе 2388. На этапе 2390 генератор может определить, является ли значение ультразвукового сопротивления меньшим, чем заново заданное пороговое значение сопротивления 2392. Если да, генератор может перевести в режим ожидания триггер набора откликов и триггер нагрузки на этапе 2394. Если нет, генератор может перейти к этапу 2398, как описано ранее.
На ФИГ. 69 представлена логическая схема одного из вариантов логической схемы нефильтрованного набора условий 2360, показанной на ФИГ. 67, которая может выполняться одним из вариантов генератора. На этапе 2406 генератор может опрeделить, является ли значение локального наклона частоты меньшим, чем пороговое значение наклона частоты 1404. в некоторых вариантах, пороговый параметр наклона частоты может зависеть от уровня мощности, выдаваемой генератором, как описано ранее. Если локальный наклон частоты меньше, чем пороговый параметр наклона частоты 1404, генератор может на этапе 2408 определить, является ли значение локальной резонансной частоты меньшим, чем пороговое значение частоты 1406. Если да, генератор может определить на этапе 2410, подготовлены ли к запуску триггеры нагрузки и набора откликов. Если да, алгоритм 2360 может выдать сообщение о том, что нефильтрованный набор условий выполнен. Если нет, генератор может определить, выполнена ли фиксация набора условий на этапе 2412. Если да, алгоритм 2360 может выдать сообщение о том, что нефильтрованный набор условий выполнен. Если нет, на каждом из этапов 2406, 2408 или 2412, алгоритм 2360 может выдать сообщение о том, что нефильтрованный набор условий не выполнен.
В некоторых вариантах, условия 2406 и 2408 могут выполняться в виде логической операции «ИЛИ» вместо приведенной в примере операции «И». Например, после обнаружения, что локальный наклон частоты ниже, чем пороговое значение наклона частоты 1404, алгоритм 2360 может перейти непосредственно к этапу 2410. Точно так же после обнаружения, что локальный наклон частоты не меньше, чем пороговое значение наклона частоты 1404, алгоритм может оценить резонансную частоту и пороговый параметр частоты 1406 на этапе 2408.
Описаны различные варианты алгоритмов 1400, 1400´ и 1400´´ для оценки наборов условий в алгоритмах ткани оценки сигнала 1300, 1300´, 1300´´. Следует понимать, что любое количество алгоритмов оценки набора условий могут выполняться с любым из алгоритмов ткани оценки сигнала 1300, 1300´, 1300´´, описанных в настоящем документе. Например, в определенных вариантах, генератор может выполнить алгоритм оценки набора условий 1400, как описано в настоящем документе ранее, вместе с алгоритмом оценки набора условий 1400´´ с использованием триггера присутствия нагрузки. Может использоваться любая подходящая комбинация алгоритмов 1300, 1300´, 1300´´, 1400, 1400´, 1400´´.
В некоторых вариантах, ультразвукового хирургического инструмента и генератора, описанных в примере, ток поддерживается на относительно постоянном уровне. Благодаря этому может быть достигнуто практически постоянное смещение ультразвукового лезвия, что, в свою очередь, позволяет достичь практически постоянной скорости процесса воздействия на ткань. В некоторых вариантах, ток поддерживается даже несмотря на изменяющиеся механические нагрузки, когда механическая нагрузка отражается с помощью ультразвукового сопротивления. Для достижения этого разности в механической нагрузке могут значительно компенсироваться с помощью модулирования подаваемого напряжения.
Как сказано в настоящем документе, для эффективной работы (например, для минимизации выделившегося в датчике тепла), хирургический инструмент (например, пара «лезвие и датчик») могут приводиться в действие на резонансной частоте системы или при близком к ней значении частоты. Частота системы может быть определена с помощью сдвига по фазе между сигналами тока и напряжения. Как сказано в настоящем документе, резонансная частота системы изменяется с изменением температуры. Например, дополнительная тепловая энергия (например, тепло) приводит к смягчению лезвия и/или других компонентов системы, тем самым изменяя резонансную частоту системы. Соответственно, генератор в некоторых вариантах, описанных в примере, осуществляет два контрольных цикла. При первом цикле поддерживается в большой степени постоянный ток при изменяющихся нагрузках, при втором цикле отслеживается резонансная частота системы и соответствующим образом модифицируются управляющие электрические сигналы.
Как описано в настоящем документе, различные алгоритмы, предназначенные для использования с ультразвуковыми хирургическими инструментами, используют приближенные физические условия инструмента (например, его ультразвукового лезвия) в зависимости электрических сигналов, поступающих в инструмент. Например, касательно ФИГ. 58 и 65, закрытие зажима идентифицируется при помощи отслеживания ультразвукового сопротивления. Однако следует понимать, что в любом из вариантов, описанных в настоящем документе, закрытие зажима может иначе обнаруживаться любым подходящим способом, например, по любому подходящему электрическому сигналу, поступающему в инструмент и/или их производным. В некоторых вариантах, описанных в примере, где ток поддерживается практически на постоянном уровне, величина сигнала напряжения пропорциональна ультразвуковому сопротивлению. Поэтому различные пороги ультразвукового сопротивления, описанные в настоящем документе, могут также использоваться в качестве порогов напряжения. Точно так же, когда ток практически постоянный, мощность или энергия, передаваемая лезвию, также пропорциональна ультразвуковому сопротивлению и соответствующим изменениям мощности, энергии, изменения напряжения, мощности или энергии со временем, и т.д., также могут означать, что зажимы закрыты. Также, как показано в настоящем документе, когда зажимы изначально закрываются, температура ультразвукового лезвия может упасть, когда оно начинает контактировать с прохладной тканью. Соответственно, смыкание кромок лезвия может также идентифицироваться путем отслеживания снижения температуры лезвия, о чем свидетельствует возросшая резонансная частота лезвия и/или один из других признаков, описанных в настоящем документе. В дополнение к этому, в некоторых вариантах, закрытие зажима может идентифицироваться путем обнаружения активации триггера закрытия и/или контрольного механизма закрытия. В разных вариантах, закрытие зажима может определяться с помощью сочетаний некоторых или всех описанных характеристик электрического сигнала.
В дополнение к этому, например, признаки нагрузки описаны в настоящем документе, например, касательно ФИГ. 65. На ФИГ. 65 и в описании к ней присутствие нагрузки обнаруживается на основании скользящей дельты частоты. Различные иные качества электрических сигналов, поступающих в инструмент, также могут использоваться для обнаружения присутствия нагрузки. Например, физические изменения, о которых свидетельствует скользящая дельта частоты, также могут обнаруживаться с помощью сигнала напряжения, изменения сигнала напряжения со временем, ультразвукового сопротивления и его наклона, второй производной частоты, тока, изменений тока с течением времени и т.д. В дополнение к этому, изменения в температуре лезвия, как описано в настоящем документе, определяются путем обнаружения изменений наклона частоты. Дополнительные характеристики электрического сигнала, которые могут варьироваться в зависимости от температуры лезвия, могут включать в себя, например, наклон мощности и/или энергии, отдаваемой лезвию.
В различных вариантах, ультразвуковой инструмент, такой как инструменты 100, 120, 1004, может приводиться в действие в соответствии с алгоритмом управления, который включает в себя приведение инструмента в действие последовательно при разных уровнях мощности. Например, когда ультразвуковой хирургический инструмент активирован, он может приводиться в действие на первом уровне мощности. Например, генератор (например, генераторы 30, 500, 1002 и/или внутренний генератор) может подавать управляющий сигнал на первом уровне мощности. По истечении первого периода генератор может подавать второй управляющий сигнал на втором уровне мощности, меньшем, чем первый уровень мощности. В некоторых вариантах, использования первый, более высокий уровень мощности может служить для отделения внутреннего мышечного слоя сосуда от адвентициального слоя, как описано в настоящем документе.
На ФИГ. 71 представлена логическая схема одного из вариантов алгоритма 3021 для запуска ультразвукового инструмента последовательно при двух уровнях мощности. На ФИГ. 70 представлена схема, иллюстрирующая мощность или участок смещения для одного примера исполнения алгоритма, показанного на ФИГ. 71. Алгоритм 3021 может выполняться генератором, например генераторами 30, 500, 1002 и/или внутренним генератором, для приведения в действие ультразвукового инструмента, например, 100, 120, 1004. На ФИГ. 70 вертикальная ось 3002 соответствует смещению концевого зажима лезвия. Горизонтальная ось 3004 соответствует времени в секундах. Алгоритм 3021 описан в настоящем документе таким образом, как он выполняется генератором, например генератором 30, 500, 1002. Следует понимать, что алгоритм 3021 может также выполняться инструментом, например, 100, 120, 1004 (например, схемой управления этими инструментами 2009).
На этапе 3020 генератор может получить триггерный сигнал, подаваемый врачом. Триггерный сигнал может быть подан любым подходящим образом. Например, в некоторых вариантах, врач подает триггерный сигнал при помощи кнопки или другого устройства ввода на самом инструменте (например, кнопок 312a, 1036a, 1036b, 1036c, ножных переключателей 434, 1020, и т.д.). На этапе 3022 генератор может активировать инструмент путем подачи первого управляющего сигнала. На ФИГ. 70 активация инструмента обозначена точкой 3006. Первый управляющий сигнал соответствует первому уровню мощности, подаваемой на концевой зажим инструмента. На этапе 3024 генератор поддерживает первый управляющий сигнал в течение первого периода. Смещение концевого зажима, соответствующее первому управляющему сигналу, отображено на ФИГ. 70 отрезком 3009. Как показано в примере на ФИГ. 70, первый уровень мощности соответствует смещению концевого зажима между отметками 60 и 120 микрон, то есть примерно до 75 микрон. Первый уровень мощности может быть выбран для отделения внутреннего мышечного слоя сосуда от адвентициального слоя и/или для оказания другого воздействия на ткань с целью улучшения процесс осушения и/или запечатывания. В некоторых вариантах, первый управляющий сигнал может также отличаться от резонанса, как описано в настоящем документе, что еще более способствует отделению внутреннего мышечного слоя сосуда от адвентициального слоя
Генератор определяет, истек ли первый период, на этапе 3026. Первый период может быть измерен любым подходящим способом. Например, в некоторых вариантах, первый период равен заданному периоду времени, который истекает после заданного отрезка времени, прошедшего с момента активации инструмента. Этот случай рассматривается на ФИГ. 70, где первый период равен одной секунде. Также в некоторых вариантах, первый период истекает, когда происходит конкретное изменение в состоянии ткани. Любые изменения в состоянии ткани, описанные в настоящем документе, могут означать окончание первого периода и, например, может использоваться любой из алгоритмов для обнаружения изменения в состоянии ткани, описанных в настоящем документе. Например, в некоторых вариантах, окончание первого периода может обозначаться изменением сопротивления в датчике.
Когда истекает первый период, генератор подает второй управляющий сигнал при втором уровне мощности на этапе 3028.В примере на ФИГ. 70 переход от первого ко второму управляющему сигналу обозначен номером 3007. Смещение концевого зажима при втором управляющем сигнале показано на ФИГ. 70 на отрезке между 20 и 60 микронами и равно примерно 37,5 микронам. Несмотря на то, что второй управляющий сигнал обозначен на ФИГ. 70 как непрерывный, следует понимать, что в некоторых вариантах, второй управляющий сигнал является, например, импульсным управляющим сигналом, как описано в настоящем документе. Второй управляющий сигнал может подаваться в инструмент до любой подходящей конечной точки. Например, на ФИГ. 70 окончание рассечения ткани обозначено точкой 3008. Отключение инструмента обозначено точкой 3010. в некоторых вариантах, рассечение ткани может быть определено при помощи алгоритмов для обнаружения изменений в состоянии ткани, описанных в настоящем документе. В некоторых вариантах, генератор может автоматически отключить инструмент или в точке рассечения 3008, или (и) после нее (например, по истечении заранее определенного периода времени).
Алгоритм 3021 может улучшить эффективность инструмента относительно простого активирования инструмента при одном уровне мощности. На ФИГ. 72 представлена схема, иллюстрирующая разрушающее давление, приобретенное хирургическим инструментом, идентичным инструменту 1004, во время работы в соответствии с алгоритмом, проиллюстрированном на ФИГ. 71 (3030), активированном при одном и том же уровне мощности (3032). В примере, проиллюстрированном на ФИГ. 72 схема 3032 отображает работу инструмента 1004, активированного при одном уровне мощности, соответствующему второму уровню мощности алгоритма 3021. Испытания алгоритма 3021 и испытания при одном уровне мощности проводились на 5-7-миллиметровых свиных сонных артериях. Как видно, при алгоритме 3012 наблюдались более высокие разрушающие давления, что может соответствовать более высокому качеству запечатываний и рассечений. На ФИГ. 73 представлена схема, иллюстрирующая время рассечения, полученное при опытах, проиллюстрированных на ФИГ. 72. Как показано, при использовании алгоритма 3021 время рассечения может быть улучшено.
При использовании алгоритма 3021 существует потенциальная возможность его неправильного использования врачом. Например, на ФИГ. 74 представлена схема 3040, иллюстрирующая характер управляющего сигнала в соответствии с одним из вариантов алгоритма 3021. На ФИГ. 74 вертикальная ось 3042 соответствует уровню мощности, а горизонтальная ось 3004 - времени. Первый и второй уровни мощности обозначены на оси 3042 «5» и «1» соответственно. Например, при использовании генератора GEN 11 производства компании Ethicon Endo-Surgery, Inc. (Цинцинатти, штат Огайо) «5» может соответствовать уровню мощности «5», а «1» может соответствовать уровню мощности «1». Как показано, врач включал (3006) и выключал (3010) инструмент несколько раз подряд, не завершая процесс рассечения ткани. Как показано, врач выключил инструмент незадолго до начала второго (менее мощного) управляющего сигнала, затем снова включил инструмент и заново установил первый (более мощный) управляющий сигнал. Следует понимать, что при таком использовании алгоритм 3021 может работать некорректно. В некоторых вариантах, алгоритм 3021 может быть изменен таким образом, чтобы использовать паузу между выключением 3010 и последующим включением 3006.
На ФИГ. 75 представлена логическая схема еще одного варианта алгоритма 3021', использующего паузу между прекращением работы инструмента и последующей его активацией. Алгоритм 3021' может выполняться генератором, например генераторами 30, 500, 1002 и/или внутренним генератором для приведения в действие ультразвукового инструмента, например, 100, 120, 1004. После получения триггерного сигнала на этапе 3020 генератор может определить на этапе 3050, прошла ли пауза с момента последнего включения инструмента. В различных вариантах, пауза выбирается таким образом, чтобы за это время ультразвуковое лезвие и/или ткань вернулись в состояние покоя. В одном из вариантов, описанных в примере, пауза составляет четыре секунды. Если пауза закончилась, алгоритм 3021' может перейти к действиям 3022, 3024, 3026 и/или 3028, как описано в настоящем документе ранее. Если пауза не закончилась на этапе 3050, генератор может на этапе 3052 передать инструменту управляющий сигнал на втором уровне мощности (например, на самом низком из всех уровней мощности для алгоритма 3021'). Таким образом, если пауза не прошла с момента предыдущего выключения, алгоритм 3021' может продолжиться из точки, в которой он прекратил выполняться после выключения.
На ФИГ. 76 представлена схема, иллюстрирующая характер управляющего сигнала в соответствии с одним из вариантов алгоритма 3021'. Врач может активировать инструмент на этапе 3056. Когда подается второй управляющий сигнал, врач выключает инструмент на этапе 3058. Например, отключение 3058 может произойти до окончания запечатывания и рассечения ткани. На этапе 3660 врач повторно активирует инструмент, например, при помощи генерирования триггерного сигнала, как описано в настоящем документе ранее. Как показано, однако, пауза не закончилась перед повторной активацией в точке 3660. Соответственно, генератор в точке 3660 подает управляющий сигнал при втором уровне мощности. После отключения в точке 3062, однако, пауза закончилась перед повторной активацией в точке 3064. Соответственно, генератор подает управляющий сигнал при первом уровне мощности, и алгоритм 3021' выполняется дальше, как показано на ФИГ. 70.
В различных вариантах, алгоритм 3021' может выполняться с использованием другого логического условия вместо паузы. Например, вместо определения, истекла ли пауза на этапе 3050, генератор может определить, выполнено ли другое логическое условие. Альтернативное логическое условие - любое подходящее условие, в том числе, например, индикатор состояния инструмента и/или ткани, на которую производится воздействие. В некоторых вариантах, логическим условием может выступать температура концевого зажима или же логическое условие может быть связано с ней. Например, альтернативное логическое условие может быть связано с резонансной частотой ультразвуковой системы привода и концевого зажима, определяемой частотой управляющего сигнала. Если частота выше порогового значения (что означает, что температура концевого зажима ниже порогового значения), алгоритм 3021' может перейти к действиям 3022, 3024, 3026, 3028, как описано. Частота управляющего сигнала может быть измерена любым способом, в том числе, например, способами, описанными в настоящем документе ранее касательно ФИГ. 21. В другом примере альтернативное логическое условие может быть связано с сопротивлением ультразвукового датчика, которое может служить еще одним параметром температуры концевого зажима, как описано в настоящем документе ранее кaсательно ФИГ. 10-13. В дополнение к этому, в некоторых вариантах, температура концевого зажима может измеряться с помощью температурного контактного датчика концевого зажима, например температурного датчика 3070, расположенного на концевом зажиме 1026, изображенном на ФИГ. 16A.
На ФИГ. 77 представлена логическая схема еще одного варианта алгоритма 3021'', использующего третий управляющий сигнал. Алгоритм 3021'' может выполняться генератором, например генераторами 30, 500, 1002 и/или внутренним генератором для приведения в действие ультразвукового инструмента, например, 100, 120, 1004. Генератор может выполнять действия 3020, 3022, 3024, 3026, 3028, как описано ранее касательно ФИГ. 71. После подачи второго управляющего сигнала на этапе 3028, однако, генератор может поддерживать второй управляющий сигнал на этапе 3070 до истечения второго периода на этапе 3072. По истечении второго периода времени генератор может подать третий управляющий сигнал. Третий управляющий сигнал подается на третьем уровне мощности, который может быть выше, чем второй уровень мощности и ниже, чем первый. Например, в одном из вариантов, описанных в примере, второй уровень мощности составляет 45% от первого уровня мощности. Третий уровень мощности может составлять, например 100%, 75%, и т.д. от первого уровня мощности. Первый и второй периоды могут составлять, например, 1,5 секунды и двенадцать секунд соответственно. Следует понимать, что алгоритм 3021'' может выполняться с использованием паузы, как алгоритм 3021'. Например, действия 3070, 3072 и 3074 могут выполняться после действия 3028, как показано на ФИГ. 75
В различных вариантах, алгоритм 3021'' может привести к более высоким разрушающим давлениям и более короткому времени рассечения по сравнению с алгоритмом 3021, показанным на ФИГ. 71. Например, на ФИГ. 79 представлена схема, иллюстрирующая разрушающие давления в хирургическом инструменте, идентичном тому, которое используется в соответствии с алгоритмом 3021, по сравнению с хирургическим инструментом, которое используется в соответствии с алгоритмом 3021''. Как показано, разрушающее давление для алгоритма 3021'' выше, чем для алгоритма 3021. Подобным образом, на ФИГ. 80 представлена схема, иллюстрирующая время рассечения, полученное при опытах, проиллюстрированных на ФИГ. 79. Как показано, время рассечения для алгоритма 3021'' меньше, чем для алгоритма 3021. В дополнение к этому, в некоторых вариантах, где алгоритм 3021'' используется вместе с другим алгоритмом - обеспечения обратной связи, (например, набора откликов) при обнаружении изменения в состоянии ткани (например, набор условий), подача третьего сигнала, имеющего более высокую мощность, может повысить эффективность алгоритмов, описанных в настоящем документе, с точки зрения обнаружения изменения в состоянии ткани.
В некоторых вариантах, алгоритмы 3021, 3021', 3021'' могут выполняться вместе с различными другими вариантами, описанными в настоящем документе. Например, любой из алгоритмов 3021, 3021', 3021'' может быть выполнен вместе с набором условий и/или набором откликов в зависимости от измеряемой характеристики инструмента и/или ткани, на которую производится воздействие с помощью данного инструмента. Например, алгоритмы 3021, 3021', 3021'' могут выполняться с одним из алгоритмов, описанных в настоящем документе ранее касательно ФИГ. 15A-15C, ФИГ. 20-22, ФИГ. 57-60, и т.д. Когда набор условий отражает состояние ткани, соответствующий набор откликов может быть выполнен поверх алгоритмов 3021, 3021', 3021''. Например, когда запущенный набор условий запрашивает обратную связь, обратная связь может быть предоставлена в ходе продолжения выполнения алгоритма 3021, 3021', 3021''. Также, например, когда запущенный набор условий запрашивает изменение управляющего сигнала, генератор может отклониться от алгоритма 3021, 3021', 3021'' в соответствии с запущенным набором откликов.
На ФИГ. 81 представлена логическая схема одного из вариантов алгоритма 3100, реализующего период первого захвата. Алгоритм 3100 может выполняться генератором, например генераторами 30, 500, 1002 и/или внутренним генератором для приведения в действие ультразвукового инструмента, например, 100, 120, 1004. На этапе 3102 генератор может получить запрос активации, например, как описано в настоящем документе ранее касательно запроса активации 3020. На этапе 3104 генератор может предоставить обратную связь, сигнализирующую о том, что инструмент активирован. Обратная связь может быть визуальной, звуковой и/или тактильной, как описано в настоящем документе. Однако когда обратная связь предоставлена, инструмент еще не активирован. Таким образом, алгоритм 3100 может предоставить время, необходимое для сжатия ткани концевым зажимом до активации инструмента в целях повышения эффективности рассечения и запечатывания. На этапе 3106 концевой зажим может определить, истек ли первый период времени. Первый период времени может составлять, например, несколько секунд. Когда первый период времени истек, генератор может активировать инструмент и начать выполнение контрольного алгоритма. Контрольный алгоритм - любой подходящий алгоритм, в том числе, например, любой из алгоритмов 3021, 3021', 3201''. Например, обращаясь к ФИГ. 71: действия 3104, 3106 будут выполняться после получения триггерного сигнала 3020. Действие 3022 будет выполняться в соответствии с 3108.
На ФИГ. 82 представлена логическая схема еще одного варианта алгоритма 3120, реализующего период первого захвата. Алгоритм 3021'' может выполняться генератором, например генераторами 30, 500, 1002 и/или внутренним генератором для приведения в действие ультразвукового инструмента, например, 100, 120, 1004. Например, алгоритм 3120 может использовать период первого захвата вместе со ступенчатой функцией, описанной в настоящем документе касательно ФИГ. 6-8. Возвращаясь к ФИГ. 82: генератор может выполнять действия 3102, 3104 и 3106, как описано в настоящем документе в отношении ФИГ. 81. На этапе 3122 генератор может подать первый управляющий сигнал 3122 при первом уровне. Первый уровень может соответствовать току, мощности, смещению концевого зажима и т.д. Когда второй период времени истек на этапе 3124, генератор подает второй управляющий сигнал на этапе 3126. Второй управляющий сигнал соответствует току, мощности и/или смещению концевого зажима при уровне, превышающем сигнал первого уровня. Второй управляющий сигнал может поддерживаться до тех пор, пока генератор не обнаружит изменение в состоянии ткани, например, падение наклона частоты ниже порога наклона частоты на этапе 3128. При наступлении такого события генератор может подать третий управляющий сигнал на этапе 3130. Третий управляющий сигнал может поддерживаться, например, до дополнительного изменения в состоянии ткани (например, рассечения), например, как определено алгоритмами, описанными ранее касательно ФИГ. 15A-15C, ФИГ. 20-22, ФИГ. 57-60, и т.д.
На ФИГ. 83 представлена схема, иллюстрирующая характер управляющего сигнала в соответствии с алгоритмом 3120. Вертикальная ось 3132 соответствует току управляющего сигнала, горизонтальная ось 3134 - времени. Сигнал активации получен на этапе 3092. Первый период времени обозначается номером 3096. Второй период времени с первым управляющим сигналом обозначен номером 3097. Второй управляющий сигнал подается на этапе 3098 до тех пор, пока не достигнут порог наклона частоты в точке 3135, после чего третий управляющий сигнал обозначен номером 3099. Рассечение происходит в точке 3008, отключение - в точке 3094.
Как сказано выше, любой из алгоритмов, описанных в настоящем документе, в том числе, 3021, 3021', 3021'', 3100, 3120, и т.д. может быть использован вместе с алгоритмом, служащим для выполнения набора условий и набора откликов. Набор условий, например, может быть истинным в зависимости от наличия или отсутствия конкретного состояния ультразвукового инструмента и/или ткани, на которую производится воздействие при помощи этого ультразвукового инструмента. Набор откликов может определять действия, которые должен произвести инструмент и/или генератор, если набор условий истинный. В некоторых вариантах, различные наборы условий могут оцениваться с использованием одной или более моделей с несколькими переменными. Примеры моделей с несколькими переменными - это, например, модели нейронной сети, модели генетических алгоритмов, модели алгоритмов дерева классификации, рекурсивные байесовские модели, и т.д.
Один подходящий вид модели с несколькими переменными - это нейронная сеть. Нейронные сети могут быть эффективны для распознавания сложных зависимостей входных переменных, благодаря чему они хорошо подходят для распознавания наборов условий, связанных с состоянием ткани (например, произошло ли рассечение, произошло ли запечатывание и т.д.). На ФИГ. 84 представлена схема описанной в примере нейронной сети 3150. Нейронная сеть 3150 состоит из группы взаимосвязанных узлов 3152, 3154, 3156, называемых нейронами. Связи между различными нейронами показывают, как данные передаются по сети. Входным нейронам 3152 присвоены значения входных данных (например, различные параметры хирургического инструмента, управляющий сигнал и т.д.). В различных вариантах, входные переменные имеют величины от нуля до единицы. Значения входных нейронов 3152 (например, входные переменные) затем используются для расчета значений различных скрытых нейронов 3154, которые, в свою очередь, используются для нахождения значения одного или более выходных нейронов 3156. Значение выходного нейрона 3156 может запустить (или не запускать) набор откликов, например, обратную связь и/или изменения в управляющем сигнале. На практике количество соответствующих входных узлов 3153, скрытых узлов 3154 и выходных узлов 3156 может отличаться, иногда значительно, от того, что изображено на ФИГ. 84. В различных вариантах, нейронная сеть работает с циклом данных. В течение каждого цикла входные величины передают входным нейронам 3152, а выходные величины получают на выходном узле 3156.
Нейронные сети могут быть полностью сообщающимися, как показано на ФИГ. 84, то есть каждый входной нейрон 3152 соединен с каждым скрытым нейроном 3154. в некоторых вариантах, может использоваться нейронная сеть, которая сообщается не полностью. Например, не все входные узлы могут быть соединены со всеми скрытыми нейронами 3154. Значения скрытых нейронов 3154 могут определяться в соответствии с функцией активации. В различных вариантах, выходные данные функции активации имеют диапазон от 0 до 1. Например, выходная функция может быть выбрана для генерирования выходных данных в диапазоне от 0 до 1 или в некоторых вариантах, результаты выходной функции могут шкалироваться. в некоторых вариантах, предпочтительно выбирать функции, являющиеся непрерывными и имеющие производные. Это может облегчить обучение нейронной сети. Например, метод обратного распространения, использующий градиентный метод, может требовать расчета частных производных выходной функции, который может быть упрощен, если функции оптимизации являются непрерывными и имеют производные. Один из примеров такой функции, которая может использоваться в качестве функций активации, - сигмоидная функция, описанная Уравнением (8) далее:

В Уравнении (8) ξ обозначает величины входных нейронов, ω - весовое значение, данное каждой входной величине, θ - константа. Когда нейронная сеть полностью сообщается, значения всех входных нейронов передаются скрытым нейронам, то есть функция активации для каждого скрытого нейрона имеет элемент ξ, соответствующий каждому входному узлу. Весовое значение, данное каждой входной величине (ω), может быть уникальным для каждого скрытого нейрона и/или каждого входного значения. Постоянная θ также может быть уникальной для каждого скрытого нейрона 3154. Результаты по каждому узлу могут описываться Уравнениями (9) и (10):

на ФИГ. 85 представлен график одного из примеров Уравнения (9), демонстрирующий, что данная функция является непрерывной и дифференцируемой.

Выходное значение сигмоидной функции показано на ФИГ. 86. Например, выходное значение (O) может быть рассчитано из взвешенной суммы входных нейронов плюс тета (например, Уравнение (8)), примененное к Уравнению (9).
В различных вариантах, каждый скрытый нейрон имеет I входные значения, которые равны количеству входных значений нейронной сети. Если имеются J скрытые нейроны 3154, то имеются I×J уникальные значения омега (ω) и J уникальные значения тета (θ). в некоторых вариантах, входной нейрон (входные нейроны) 3156 могут использовать одно и то же уравнение активации. Соответственно, могут быть J×K уникальные значения омега (ω), соединяющие скрытые нейроны 3154 с выходным нейроном 3156, где K - это количество выходных нейронов и K уникальные значения тета (θ) выходного узла (выходных узлов) 3156.
Выходное значение нейронной сети может отражать истинность или ложность набора условий, состоящего из одного или более условий ультразвукового хирургического инструмента, ткани, на которую производится воздействие данным хирургическим инструментом, или комбинации этих двух типов условий. Например, нейронная сеть может использоваться для моделирования набора условий, показывающего, следует ли предоставлять обратную связь о рассечении ткани в точке отделения или вблизи этой точки. Например, в некоторых вариантах, выходное значение нейронной сети может означать, достигло ли рассечение 80% процентов. Может использоваться любое подходящее количество и вид нейронов 3152, 3154, 3156. Например, нейронная сеть 3150 может состоять из двенадцати входных нейронов 3152, (I=12), четырех скрытых нейронов (J=4) и одного выходного нейрона (K=1). Цикл данных может составлять 10 миллисекунд. Соответственно, 12 входных значений могут вводиться в сеть 3150, а результаты подсчитываться каждые 10 миллисекунд.
Входные переменные (например, переменные, соответствующие входным узлам 3152) могут включать в себя любые переменные, которые могут при некоторых обстоятельствах влиять на значение выходного узла 3156. Входные переменные, описанные в примере ниже, могут использоваться в нейронной сети, например, 3154 с выходным узлом или выходными узлами, которые соответствуют любому подходящему значению, имеющему отношение к ультразвуковому инструменту, например, 80% рассечения. Следует понимать, что входные переменные, описанные в настоящем документе, также могут использоваться в любой другой подходящей модели, в том числе, например, моделях генетических алгоритмов, моделях алгоритмов дерева классификации, рекурсивных байесовских моделях и т.д.
В некоторых вариантах, входные переменные, соответствующие входным узлам 3152, включают в себя переменные, описывающие работу хирургической системы в процессе воздействия на ткань. Воздействие на ткань может, например, начаться, когда хирургическая система активирована на ткани. Примеры входных переменных при воздействии на ткань описаны ниже:
Входная переменная времени, прошедшего с момента активации, обозначает время, которое прошло с момента активации инструмента (например, в начале воздействия на ткань). Время может измеряться любыми подходящими отрезками в том числе, например, составлять 10 миллисекунд (0,010 секунды) начиная с момента активации инструмента (например, 0,00 секунды). В некоторых вариантах, время, прошедшее с момента активации, измеряется и хранится генератором.
Различные переменные могут использоваться для описания работы ультразвукового датчика или рукоятки, в том числе, например, падение напряжения в датчике, ток, потребляемый датчиком, и сопротивление датчика. Значения этих и подобных переменных могут фиксироваться и храниться (например, генератором) с любым подходящим интервалом. Например, значения напряжения, тока и/или сопротивления могут собираться с интервалом, равным циклу данных нейронной сети 3150.
Дополнительные входные переменные описывают различные изменения напряжения, тока и/или сопротивления датчика за заданные периоды времени. Например, средние значения напряжения, тока или сопротивления могут собираться за весь период активации (например, как описано временем, прошедшим с момента активации). В дополнение к этому, в некоторых вариантах, средние значения напряжения, тока или сопротивления собираются с использованием определенного количества предыдущих дискретизированных значений. Например, среднее сопротивление может рассчитываться по последним A дискретизированным значениям сопротивления, где A может равняться 10. Мощность, энергия и различные другие величины, выводимые из напряжения, тока и/или сопротивления, могут также рассчитываться как самостоятельные входные переменные или в различных вариациях. Например, в некоторых вариантах, используется общая энергия в качестве входной переменной. Общая энергия может означать суммарное количество энергии, переданной ультразвуковой системе с момента активации. Ее можно вывести, например, умножая суммарную мощность на время в течение активации. Кривая или форма сопротивления отражает изменения в сопротивлении с момента активации. В некоторых вариантах, к кривой сопротивления может применяться сглаживание с помощью сплайна или иной функции сглаживания. Применение сглаживающей функции может выделить точки перегиба, присутствие или расположение которых может использоваться в качестве входных переменных. Например, кривая сопротивления в некоторых вариантах, может претерпевать внезапное падение, когда происходит разрез. Различные входные переменные, описанные в примере, такие как кривая сопротивления, описаны как кривая или набор значений. Такие переменные могут быть введены в нейронную сеть 3150 или подобную модель в любом подходящем виде, в том числе, например, путем использования какой-либо области под кривой, использования одного или более пиковых значений, использования среднего или скользящего среднего кривой и т.д. в некоторых вариантах, интегралам, пикам, средним значениям и т.д. различных кривых могут быть присвоены значения, исключающие переходные эффекты, вызванные активацией. Дополнительные переменные могут включать в себя, например, общую энергию (например, с момента активации), общее изменение напряжения (например, с момента активации) и т.д.
Ð Различные входные переменные связаны с резонансной частотой хирургической системы (например, датчик, волновод и лезвие). Резонансная частота хирургической системы может выражаться частотой управляющего сигнала. Например, как описано в настоящем документе, генератор может быть настроен таким образом, чтобы приводить в действие хирургическую систему (например, обеспечивать управляющий сигнал) на резонансной частоте системы. В некоторых вариантах, сама резонансная частота (например, ток или мгновенная резонансная частота) может быть входной переменной. Резонансная частота может быть дискретизирована с любым подходящим интервалом, например, равным циклу данных нейронной сети или другой модели. Другой пример переменной резонансной частоты описывает изменение в резонансной частоты в течение периода воздействия на ткань. Например, изменение резонансной частоты может быть установлено равным разнице между значением текущей резонансной частоты и значением частоты в момент активации и/или в определенный момент после активации (например, 0,5 секунды после активации). Еще одна переменная резонансной частоты описывает производную частоты dF/dt или мгновенный наклон резонансной частоты. Дополнительная переменная резонансной частоты может быть выведена путем использования среднего значения производных частоты. Один из примеров среднего рассчитывается с учетом всех значений производной частоты с момента активации и/или значений производной частоты за определенный период, например, за последние 10 циклов данных нейронной сети 3150. в некоторых вариантах, могут использоваться несколько переменных среднего значения производной частоты, при этом каждая переменная рассчитывается за разные периоды (например, различное количество прошедших циклов данных нейронной сети 3150 или другой модели). Также могут использоваться различные другие вариации резонансной частоты, описанные в настоящем документе. Один из примеров переменной резонансной частоты описывает максимальное среднее значение производной частоты, рассчитанное с учетом предшествующих A средних dF/dt значений, где A может обозначать количество циклов данных нейронной сети 3150 или другой модели. Например, A может быть равно 10. Другой пример входной переменной - запас по фазе. Запас по фазе описывает сдвиг по фазе между управляющим сигналом и смещением лезвия. Запас по фазе может измеряться любым подходящим способом, как описано в общедоступном патенте США № 6 678 621 под заголовком «Контроль смещения выходного устройства с использованием запаса по фазе в ультразвуковом ручном блоке», составляющим часть настоящего документа по ссылке во всей полноте.
В различных вариантах, нейронная сеть 3150 или другая модель получает входные переменные, имеющие значения, которые описывают конкретную хирургическую систему (например, переменные для конкретной системы). Переменные для конкретной системы могут описывать характеристики любого компонента или группы компонентов хирургической системы, в том числе, например, рукоятки, лезвия, волновода, концевого зажима, рычага зажима, зажимной пластины и т.д. Таким образом, переменные для конкретной системы могут служить для отображения характерных признаков каждой хирургической системы. Различные переменные для конкретной системы могут измеряться и использоваться разными способами. Например, переменные для конкретной системы могут использоваться в подготовке и выполнении нейронной сети 3150 или другой модели.
Некоторые переменные для конкретной системы описывают характеристики хирургической системы или ее компонентов, которые могут быть физически измерены. Длина системы описывает длину хирургической системы (например, ее волновода и лезвия). Длина систем, описанных в примере, - 23 см, 36 см и 45 см. в некоторых вариантах, отдельные нейронные сети 3150 могут быть обучены и использованы для систем разной длины, но этого можно избежать, если использовать длину системы как входную переменную.
Некоторые входные переменные для конкретной системы описывают характеристики ультразвукового лезвия. Например, индивидуальный коэффициент усиления лезвия описывает соотношение увеличения или уменьшения смещения от датчика до кромки лезвия (например, коэффициент усиления лезвия может описывать комбинацию лезвия и волновода). Коэффициент усиления любого данного ультразвукового лезвия может определяться физическими характеристиками лезвия, в том числе, например, перепадами диаметров на протяжении лезвия. Разные лезвия, произведенные по одинаковым спецификациям могут иметь слегка различающиеся коэффициенты усиления, например, в силу производственных допусков. Например, коэффициент усиления для одного подходящего лезвия может составлять 3,5±0,2. В различных вариантах, коэффициент усиления лезвия измеряется в процессе производства и/или испытания хирургической системы. Например, для измерения смещения лезвия при его приведении в действие генератором и рукояткой с известными коэффициентами усиления может использоваться лазерный виброметр или иной подходящий инструмент.
Еще одна переменная для каждого отдельного лезвия - естественная резонансная частота лезвия. Она также может называться резонансной частотой в состоянии покоя. Естественная резонансная частота - функция физических характеристик лезвия. В различных вариантах, естественная резонансная частота измеряется в процессе производства или испытаний лезвия (или связанной с ним системы), например, с использованием импульсного возбуждения или эхо-тестирования. При проведении эхо-тестирования звуковые волны или вибрации при различных частотах передаются лезвию (обычно без нагрузки). Фиксируется частота, при котором лезвие начинает резонировать. Например, для записи отклика лезвия на сигналы звуколокационного устройства разной частоты может использоваться микрофон или другой звуковой сенсор. Для определения резонанса анализируются частотные характеристики измеряемых величин. Еще одна переменная для конкретного лезвия - коэффициент Q. Коэффициент Q описывает диапазон частот лезвия относительно его средней частоты. Другими словами, коэффициент Q описывает, насколько плотен спектр частот лезвия вокруг его резонансной частоты. Коэффициент Q может измеряться, например, с использованием общедоступных анализаторов спектра, например, в ходе производства или испытания лезвия или связанной с ним системы.
Дополнительная переменная, характеризующая конкретное лезвие - это длина лезвия. Например, в силу производственных допусков не все лезвия одной и той же конструкции имеет одинаковую длину. Точная длина лезвия может измеряться с использованием любого подходящего метода измерения и оборудования, в том числе, например, микрометров, оптических систем, координатно-измерительных машин, и т.д. Отклонение лезвия обозначает степень отклонения лезвия при контакте с зажимным рычагом. Степень отклонения лезвия может измеряться, например, с использованием неконтактного лазерного измерителя смещения, циферблатного индикатора или любого другого подходящего инструмента. Различные акустические характеристики лезвия также могут использоваться в качестве входных переменных, характеризующих конкретное лезвие. Коэффициент Пуассона для различных лезвий может измеряться с использованием тензометров для измерения поперечной и продольной деформации и/или может определяться исходя из материала, из которого изготовлено лезвие. Скорость звука в различных лезвиях также может измеряться и/или определяться исходя из материалов, из которых изготовлено лезвие. Другие акустические характеристики, являющиеся потенциальными входными переменными, включают фазовую скорость, плотность, сжимаемость или жесткость, модуль объемной упругости, и т.д. Например, многие акустические характеристики лезвий, зажимных пластин и т.д. предоставляются производителями материалов.
Дополнительные переменные, характеризующие свойства конкретного лезвия, включают в себя поверхностный коэффициент трения и расчетную поверхность уплотнения. Поверхностный коэффициент трения может быть связан с моделями воздействия на ткань, поскольку поверхностный коэффициент трения может иметь отношение к мощности, сообщаемой ткани, например, согласно Уравнению (11):

В Уравнении (11) η - поверхностный коэффициент трения (например, динамическое трение); f - частота управляющего сигнала (например, резонансная частота системы); N - осевая сила; d - смещение лезвия. Поверхностный коэффициент трения может измеряться любым подходящим способом. Например, лезвие может быть установлено на поворотный стол и вращаться, пока к немцу применяется осевая сила известной величины. В некоторых вариантах, Уравнение (11), приведенное выше, учитывает расчетную поверхность уплотнения, выраженную Уравнением (12):

В Уравнении (12) SS - расчетная поверхность уплотнения. Расчетная поверхность уплотнения может определяться, например, на основе геометрической формы лезвия. Например, могут иметь значение длина, ширина и кривизна лезвия. Примером связанной входной переменной является синхронизатор лезвия. Например, в некоторых вариантах, лезвие изогнуто. Синхронизатор лезвия описывает угловое направление кривизны лезвия относительно продольной оси.
В различных вариантах, способ, которым хирургическая система воздействует на ткань, зависит от того, как именно зажимной рычаг и лезвие захватывают ткань. Это, в свою очередь, может зависеть от различных параметров конкретной системы и других характеристик. Например, различные переменные, отражающие свойства конкретной системы, описывают взаимодействие между лезвием, зажимным рычагом и зажимной пластиной. Один из примеров такой входной переменной - это сила зажима, применяемая между лезвием и зажимным рычагом. Например, сила зажима может соответствовать FT, описанной в настоящем документе ранее касательно Уравнения (1). Сила зажима может измеряться любым подходящим способом. Например, что касается хирургической системы 19, показанной на ФИГ. 1-3, зажимной рычаг 56 может быть закреплен в открытом состоянии (например, не контактируя с лезвием 79). Силовой датчик может крепиться к зажимному рычагу 56, например, в средней точке между точкой поворота и дистальным концом зажимного рычага 56. Тогда для смыкания зажимного рычага 56 с лезвием 79 может быть активирована ручка 68. Силовой датчик может измерять применяемую силу. В некоторых вариантах, позиция пускового механизма может отслеживаться для выведения входной переменной, выражающей силу зажима относительно расположения пускового механизма. В некоторых вариантах, используется максимальная сила. В некоторых вариантах, сила зажима измеряется, когда зажимной рычаг установлен в открытой позиции. Между лезвием и зажимным рычагом может быть помещен датчик давления, например, производства TEKSCAN.
Подобные переменные включают в себя ход спускового крючка, усилие срабатывания и силу сжатия пружины вспомогательного трубчатого механизма. Ход спускового крючка - это расстояние, которое спусковой крючок 34, 4120 (ФИГ. 93) проходит при осуществлении смыкания зажимного рычага и лезвия. Ход спускового крючка может соответствовать смещению пружины, при котором закрывается зажимной рычаг. Например, пружина 5051 показана на ФИГ. 105. Что касается ФИГ. 93, 95 и 105, хотя пружина 5051 не изображена на ФИГ. 95, следует понимать, что пружина 5051 или подобная ей может соединяться с вилкой 4174, изображенном на ФИГ. 95, и с ручкой 4122 способом, идентичным проиллюстрированному на ФИГ. 105. Как указано в описании к ФИГ. 93 и 95, проксимальное движение спускового крючка 4120 приводит к дистальному движению вилки 4174 и к возвратно-поступательному движению трубчатого элемента привода 4138, в результате чего происходит смыкание зажимного рычага 4150 и лезвия 4152. При дистальном движении хомута 4174 может произойти растягивание пружины 5051. Соответственно, ход спускового крючка (например, спускового крючка 4120) отражает растяжение пружины (например, 5051) и, следовательно, может служить приближенным значением силы зажима. Усилие срабатывания (например, усилие, которое необходимо сообщить спусковому крючку) также может использоваться в качестве входной переменной. Ход спускового крючка и усилие срабатывание могут измеряться любым подходящим способом. В некоторых вариантах, сила трубчатого вспомогательного механизма также может измеряться и использоваться в качестве входной переменной. Например, обращаясь к ФИГ. 95: сила трубчатого вспомогательного механизма равна силе, применяемой к зажимному рычагу 4150 и лезвию 4152 элементом привода с возвратно-поступательным движением 138. Различные величины хода и силы, описанные в настоящем документе, могут измеряться любым подходящим способом с использованием любого подходящего оборудования, в том числе, например, систем технического зрения, тензометров, циферблатных индикаторов и т.д.
Другие переменные, имеющие отношение к зажимному действию, связаны с эпюрой давления. Эпюра давления описывает распределение давления в лезвии и зажимном рычаге, когда зажимной рычаг закрыт. Зажимной профиль может быть измерен любым подходящим способом. Между лезвием и зажимным рычагом может быть помещен датчик давления, например, производства TEKSCAN. Зажимной рычаг затем закрывается (например, с помощью спускового крючка 34 и/или спускового крючка 4120, описанных в настоящем документе) измеряется результирующая сила (и/или распределение сил). В некоторых вариантах, силы зажима могут измеряться с учетом не всей длины зажимного рычага. Например, зажимная сила на определенном участке зажимного рычага или лезвия (например, на проксимальном конце зажимного рычага) может использоваться как входная переменная для нейронной сети 3150 или иной подходящей модели.
Другие входные переменные, связанные с действием зажима, включают в себя прогиб зажимного рычага, позицию или ход зажимного рычага, угол браншей при полностью ненажатом спусковом крючке и высоту пластины. Прогиб зажимного рычага - мера степени прогиба зажимного рычага при сомкнутых зажимном рычаге и лезвии. Позиция или ход зажимного рычага, также называемая углом браншей при не нажатом спусковом крючке, обозначает расстояние или угол между зажимным рычагом и лезвием. Например, угол браншей при полностью ненажатом спусковом крючке может измеряться с помощью системы технического зрения, оптического компаратора, угломера и т.д. Высота пластины обозначает толщину зажимной пластины. Данные величины могут измеряться любым подходящим способом. Например, система технического зрения может использоваться для снятия изображений лезвия и определения прогиба зажимного рычага и т.д. В дополнение к этому, могут использоваться различные механические и оптические средства определения расстояний для измерения конкретных размеров. Дополнительные переменные, связанные с зажимным действием, могут описывать свойства пластины (например, зажимной пластины 58). Примеры таких параметров: номер партии пластин, размеры пластины, распределение материалов пластины, твердость материалов пластины, термические свойства пластины, а также средние значения этих или подобных величин по партии.
В некоторых вариантах, переменным, характеризующим конкретную систему, присваиваются значения, полученные в результате измерений, сделанных в ходе испытаний. Например, некоторые входные переменные определяются при приработке системы. Один из вариантов приработки описан в настоящем документе ранее касательно ФИГ. 26-28. Приработка может быть выполнена при известных (и повторяющихся) условиях, например, когда инструмент работает без нагрузки, с полностью закрытым зажимом и сухим (например, между зажимным рычагом и лезвием ничего нет). В некоторых вариантах, наклон частоты во время приработки может служить входной переменной вместе с подобными величинами, такими как, например, мощность, энергия, напряжение, скорость изменения мощности (d⋅Мощность/dt); скорость изменения энергии (d⋅Энергия/dt); скорость изменения напряжения (dV/dt); скорость изменения тока (dI/dt); скорость изменения частоты (df/dt); скорость изменения сопротивления (dZ/dt), пиковое сопротивление и т.д. В некоторых вариантах, когда приработка выполняется без нагрузки (например, когда лезвие прижато к пластине), описанные ранее переменные могут оставаться относительно постоянными в течение приработки. Однако если переменные изменяются, наклон частоты или другая переменная могут фиксироваться в определенное время после активации, может вычисляться их среднее или могут производиться иные математические комбинации за весь цикл приработки или его часть и т.д.
В некоторых вариантах, берется наклон частоты или иная величина в условиях приработки, при мощности генератора, установленной на разные уровни. Например, наклон частоты или иной показатель может сниматься, когда генератор включен на первом уровне мощности, а второй наклон частоты или иной показатель может сниматься, когда генератор включен на втором уровне мощности. В некоторых вариантах, приработка может осуществляться с тканью (например, свиной тканью) или заменителем ткани (губчатое вещество и т.д.), помещенной между зажимной пластиной и лезвием. В некоторых вариантах, наклон частоты и связанные с ним переменные могут изменяться по мере рассечения заменителя ткани. Например, наклон частоты может браться в разных точках в течение цикла приработки, может вычисляться его среднее значение за весь цикл или его часть и т.д. Еще одна переменная, связанная с испытаниями - это количество выполненных циклов приработки. В некоторых вариантах, могут быть выполнены несколько циклов приработки, например, если во время первой приработки возникает проблема с инструментом или тестовой процедурой.
После выполнения приработки могут быть измерены (и использованы в качестве входных переменных) различные другие характеристики хирургической системы. Например, при приработке на зажимной пластине может создаваться вмятина, соответствующая лезвию. Анализ вмятины может показать приработочную глубину (например, глубину вмятины). Глубина может измеряться с помощью любого подходящего устройства. В некоторых вариантах, глубина приработки может измеряться с помощью системы технического зрения, лазерного дальномера и/или иного механического или оптического измерительного инструмента. В некоторых вариантах, глубина приработки берется в различных точках зажимного рычага для определения распространения глубины приработки (например, профиля контактов). В дополнение к этому, в некоторых вариантах, точка контакта с зажимным рычагом может вычисляться исходя из вмятины. Например, наибольшая глубина вмятины может соответствовать точке первого контакта.
Другие входные переменные, характеризующие конкретную систему, измеряются в несвязном состоянии. Несвязное состояние может воссоздаваться, когда зажимной рычаг не находится в контакте с лезвием и лезвие работает без нагрузки. Переменные, измеряемые в несвязном состоянии, могут включать в себя потребляемую мощность, сопротивление устройства, наклоны частоты при разных уровнях мощности, сопротивление лезвия при разных уровнях мощности, ток, напряжение и сопротивление рукоятки и т.д. В различных вариантах, системные переменные и переменные, связанные со средой, могут измеряться во время пробного запуска. Например, различные хирургические системы требуют пробного запуска перед работой с тканью. Пробный запуск необходим для того, чтобы, убедиться в правильности сборки хирургической системы. Во время пробного запуска могут фиксироваться различные переменные, характеризующие конкретную систему, в том числе, например, напряжение, ток, сопротивление, резонансная частота и их изменения, например, как описано в настоящем документе.
Дополнительные переменные, характеризующие конкретную систему, связаны с температурным откликом лезвия и/или зажимного рычага. Например, температурный отклик зажимного рычага описывает, как именно нагревается конкретный зажимной рычаг, подвергшийся воздействию теплового потока. Температура зажимного рычага может измеряться, например, с помощью инфракрасного термометра. Температурный отклик зажимного рычага может выражаться как количество градусов нагревания в температуре на ватт теплового потока. Точно так же кривая охлаждения зажимного рычага может являться мерой охлаждения данного лезвия при комнатной температуре за единицу времени, например, выраженной в градусах на единицу времени. Подобные входные переменные могут иметь привязку к лезвию, в том числе, например, температурный отклик лезвия и кривая охлаждения лезвия. Еще один пример переменной температурного отклика - зависимость сопротивления лезвия от температуры. Это может быть мерой акустического сопротивления лезвия (например, выраженного электрическим сопротивлением датчика) как функции температуры. Поскольку изменение температуры лезвия может вызвать изменение частоты, компоненты, с помощью которых лезвие и волновод крепятся внутри вала, не обязательно могут располагаться точно в центрах узла (например, точках на волноводе с нулевым поперечным смещением). Соответственно, когда компоненты расположены не точно в узловых точках, они могут вызывать акустическое сопротивление в системе при работе без нагрузки. Благодаря измерению этих изменений и, как следствие, изменений частоты можно моделировать не только температуру лезвия, но и то, насколько далеко на лезвии (например, от ручки) изменилась температура лезвия. Соответствующие температурные отклики и/или кривые охлаждения могут использоваться как входные данные для нейронной сети 3150 любым подходящим способом. Например, может быть выбран наклон соответствующих кривых, величина излома, где изменяется наклон или любая другая подходящая величина.
Другой пример: переменные, характеризующие конкретную систему, включают в себя возраст производственной линии, на которой была произведена система, и поперечную частоту лезвия, измеренную, например, в ходе приработки. Например, производственное оборудование может меняться в ходе эксплуатации, из-за чего лезвия и другие компоненты, произведенные в разные периоды эксплуатационного срока оборудования, могут вести себя по-разному. Поперечные частоты описывают вибрации лезвия, которые по направлению поперечны валу и могут измеряться, например, при помощи векторного анализатора сигнала или спектрометра, такого как анализатор сигнала N9030A PXA производства AGILENT TECHNOLOGIES. Поперечные частоты могут измеряться в любых подходящих условиях, в том числе, например, в заранее определенных условиях, таких как приработка или несвязное состояние.
Различные входные переменные для нейронной сети 3150 могут быть связаны с рукояткой или датчиком, использующимся хирургической системой для осуществления воздействия на ткань. Примеры таких переменных - сопротивление датчика, как описано выше, резонансная частота рукоятки, установленная точка тока рукоятки и т.д. Резонансная частота рукоятки описывает резонансную частоту рукоятки независимо от волновода или лезвия. Например, резонансная частота рукоятки может измеряться во время производства. Заданное значение тока для рукоятки обозначает уровень тока, подаваемого на конкретный рукоятка для осуществления смещения на определенное расстояние. Различные ручные блоки могут иметь различные заданные значения тока в зависимости от различных производственных допусков. Заданное значение тока, резонансная частота и другие переменные величины, характеризующие рукоятка, могут храниться, например, в электронно стираемой программируемой постоянной памяти (EEPROM) или другом устройстве хранения, имеющимся в ручном блоке. Генератор может запросить у рукоятки переменные, характеризующие конкретный рукоятка. В некоторых вариантах, использование переменных, характеризующих рукоятка, может вносить больше ясности в другие различные переменные, описывающие систему, измеренные в процессе производства и/или тестирования. Например, когда система используется врачом, может использоваться другой или, зачастую, более новый рукоятка. Для этого переменные, описывающие конкретный рукоятка, могут корректироваться.
Следует понимать, что нейронная сеть 3150 может использовать любые из входных переменных, описанных ранее в настоящем документе. В некоторых вариантах, нейронная сеть 3150 может оцениваться при помощи алгебры матриц. Могут использоваться четыре матрицы, например. 1×I входная матрица (O_i) может включать в себя (например, шкалированные) величины I входных нейронов. I×J омега-матрица скрытых нейронов (W_ij) состоит из омега- (ω) величин, используемых для расчета значений скрытых нейронов 3154. J×K омега-матрица выходных нейронов (W_jk) состоит из омега- (ω) величин, используемых для расчета значения выходного нейрона или выходных нейронов 3156. 1×J постоянная матрица скрытых нейронов (O_j) состоит из постоянных величин θ скрытых нейронов 3154. 1×K постоянная матрица выходного нейрона (O_k) состоит из постоянных величин θ выходного нейрона (выходных нейронов) 3156. Для любого данного цикла выходные данные нейронной сети могут быть посчитаны путем оценки матриц с помощью следующих Уравнений (13)-(16):

Результатом Уравнения (13), x_j, может являться взвешенные суммы значений входных нейронов для каждого скрытого нейрона 3154. Матрица x_j может быть обработана поэлементно при помощи уравнения, например, Уравнения (14), результатом чего будет матрица такого же размера, O_j.

Результатом Уравнения (14), O_j могут быть значения каждого из скрытых нейронов 3154. В Уравнении (12) Z обозначает матрицу единиц, имеющих размер K×J.

Результатом Уравнения (15), x_k, могут являться взвешенные суммы значений скрытых нейронов для каждого выходного нейрона 3156. Матрица x_k обрабатывается поэлементно при помощи уравнения, например, Уравнения (16), в результате чего получаем матрицу такого же размера, O_k.

Результатом Уравнения (16), O_k, могут быть выходные данные нейронной сети. В Уравнении (15) Z1 может быть матрица единиц с размером K×1.
Нейронная сеть может быть обучена любым подходящим способом. Например, в некоторых вариантах, нейронная сеть может быть обучена с использованием обратного распространения. При обучении с использованием обратного распространения поток данных нейронной сети имеет обратное направление. Например, параметры ошибок, противопоставленные реальным выходным данным используются для изменения индивидуального весового значения и постоянных параметров. На ФИГ. 87 представлена логическая схема одного из вариантов алгоритма для обучения нейронной сети, например, нейронной сети 3150 с использованием обратного распространения. На этапе 3172 могут генерироваться релевантные массивы данных. В некоторых вариантах, для обучения и тестирования генерируются отдельные массивы данных с тем, чтобы имело место реальное распознавание зависимостей в данных, а не простое считывание сетью файлов данных, используемых для обучения. Каждый массив данных может включать в себя, например, все необходимые входные данные (например, см. ТАБЛИЦУ 8). Каждый массив данных может также включать в себя реальные величины, характеризующие состояние инструмента и/или ткани, соответствующие каждому массиву входных величин, которые представляют значение, смоделированное нейронной сетью. Например, в некоторых вариантах, реальные величины могут включать себя данные о рассечении, содержащие информацию о том, достигло ли рассечение ткани порогового уровня (например, 80%) с использованием любого данного массива входных значений. Нейронные сети, обученные таким образом, могут выдавать выходные данные, содержащие информацию о том, достигло ли рассечения ткани порогового уровня. Следует понимать, что может использоваться любое подходящее значение, в том числе, например, любой другой процент рассечения, полное рассечение, запечатывание ткани и т.д. Достигло ли рассечение конкретного образца отметки 80% или иной пороговый статус рассечения может определяться в некоторых вариантах, в зависимости от количества рассекаемой ткани по длине разреза. Например, рассечение может осуществляться сразу полностью, а может производиться спереди назад, сзади наперед или из центра по сторонам. Рассечение конкретного образца ткани до какого-либо порогового уровня может определяться любым подходящим методом. Например, в некоторых вариантах, процесс разрезания может записываться на видеокамеру, и пользователь может визуально определить, достигло ли рассечение порогового значения. В дополнение к этому, в некоторых вариантах, исполнения изобретения для измерения позиции зажимного рычага относительно лезвия может использоваться оптический (например, лазерный) сенсор позиционирования. Наклон зажимного рычага относительно лезвия может отражать степень рассечения.
На этапе 3174 создается нейронная сеть. Например, величины весовых значений и констант для различных нейронов 3154, 3156 могут инициализироваться в произвольном порядке (например, с помощью функции MATLAB «rand», которая генерирует равномерное распределение). В некоторых вариантах, может использоваться диапазон значений от -2,5 до 2,5, поскольку данные значения результируются в выходных данных в диапазоне 0-1 при обработке сигмоидной функцией активации. На этапе 3176 сеть 3150 может быть запущена с использованием входных данных для генерирования прогнозируемого результата вычислений (или результатов, если выходных узлов несколько). На этапе 3178 может быть рассчитана ошибка. Ошибка - это разница между прогнозируемыми результатами, полученными от 3176, и реальным значением свойства ткани или инструмента, как описано в настоящем документе. В различных вариантах, результат или результаты могут определяться как двоичные числа, где один (1) соответствует существованию или истинности условия, а ноль (0) - отсутствию или ложности условия. Например, когда условие - это 80% рассечения, результат должен быть равным 1, если ткань рассечена на 80%, и 0, если ткань не рассечена (пока) на 80%. в некоторых вариантах, условие может считаться истинным, если выходное значение нейронной сети 3150 превышает пороговое значение (например, 0,85).
На этапе 3180 оцениваются весовые значения каждого узла. Например, для каждого весового значения находится частная производная выходных данных или ошибки (E) относительно весового значения (омега (ω)). Это может выражаться как δE/δ ωij для связей между входным слоем 3152 и скрытым слоем 3154, и как δE/δ ωjk для связей между скрытым слоем 3154 и выходным слоем 3156. На этапе 3182 оцениваются константы для каждого узла. Например, для каждой константы находится частная производная выходного значения или ошибки (E) относительно константы θ. Это может выражаться как δE/δ θi для связей между входным слоем 3152 и скрытым слоем 3154, и как δE/δ θj для связей между скрытым слоем 3154 и выходным слоем 3156. На этапе 3184 могут быть рассчитаны дельты для каждого весового значения и каждой константы. Дельты могут определяться путем умножения каждой частной производной на градиентную константу η. в некоторых вариантах, для η может использоваться значение 0,1. Дельты могут затем прибавляться к оригинальным значениям каждого весового значения и константы. Действия 3176, 3178, 3180, 3182 и 3184 могут повторяться для последующих циклов входных данных. В некоторых вариантах, сеть 3150 после обучения может тестироваться. Например, сеть 3150 может тестироваться, как описано в настоящем документе, на тестовом массиве данных, который отличается от массива данных для обучения. В различных вариантах, нейронная сеть или модель с несколькими переменными могут быть уже обученными. Результирующие параметры модели (например, конфигурация сети, величины весовых значений и констант и т.д.) могут определяться и храниться в генераторе и/или инструменте. Значения могут использоваться для выполнения модели во время использования.
На ФИГ. 88 изображена логическая схема одного из вариантов алгоритма 3160 для определения набора условий для ультразвукового инструмента с использованием модели с несколькими переменными, например, нейронной сети 3150, описанной в настоящем документе. Как и в случае других алгоритмов контроля инструмента, описанных в настоящем документе, алгоритм 3160 описан с точки зрения выполнения генератором, таким как генераторы 30, 50, 1002, описанные в настоящем документе, однако в некоторых вариантах, может выполняться самим инструментом. В дополнение к этому, хотя в настоящем документе описана нейронная сеть, следует понимать, что алгоритм 3160 может выполняться с использованием любой подходящей модели, в том числе, например, модели генетических алгоритмов, модели алгоритмов дерева классификации, рекурсивных байесовских моделей и т.д. На этапе 3162 генератор может выполнить модель с несколькими переменными. Выполнение модели с несколькими переменными может предполагать ввод входных данных в модель, обработку входных данных и генерирование результата. Например, процесс выполнения нейронной сети, описанной в примере, описан в настоящем документе ранее в связи с Уравнениями (11)-(14). На этапе 3164 генератор может определить, выполнен ли смоделированный набор условий. В примере, описанном выше, может определяться, выполнено ли 80% рассечения (например, превысило ли значение выходного узла 3156 пороговое значение. Если нет, на этапе 3162 модель может выполняться далее. Если да, на этапе 3166 может быть запущен отклик, связанный с набором условий. Набор откликов может включать в себя любые подходящие действия, в том числе, например, обратную связь, сообщающую об истинности набора условий, изменении управляющего сигнала для инструмента и т.д.
Несмотря на то, что в настоящем документе описаны нейронные сети, такие как 3150, следует понимать, что в дополнение к нейронной сети или вместо нее может использоваться любой другой подходящий вид модели с несколькими переменными, в том числе, например, модели генетических алгоритмов, модели алгоритмов дерева классификации, рекурсивные байесовские модели и т.д. Например, рекурсивная байесовская модель моделирует вероятность наступления выходного результата (например, состояние выполнения рассечения до порогового значения), где вероятность равна нулю в начале рассечения (например, t=0) и постоянно увеличивается с каждым временным шагом. Степень увеличения вероятности зависит от того, выполнены ли определенные критерии. Критерии могут отражать пороговые значения различных входных переменных. Например, если «порог наклона частоты <1» истинно, вероятность может увеличиться на определенную величину для тех временных шагов, для которых это условие является истинным. Если «порог дельты < частоты» истинно, вероятность может еще больше возрасти, а сумма этих увеличений, происходящих в силу разных критериев на каждый временном шаге, свидетельствует об увеличении вероятности в это время. Когда вероятность достигает порогового значения (например, 0,85), рекурсивная байесовская модель может выдать сообщение о том, что смоделированное условие истинно.
Другим видом подходящей модели с несколькими переменными является дерево классификаций или дерево решений. Дерево классификаций или дерево решений состоит из множества двоичных решений, выстроенных в соответствии с иерархической древовидной структурой, например, в некоторых вариантах, исполнения генератор может первым определять, является ли значение наклона частоты, характеризующего управляющий сигнал, передаваемый хирургическому инструменту, меньшим, чем пороговое значение. Если нет, тогда изменение частоты может сравниваться со вторым порогом. Если изменение частоты меньше, чем порог, генератор может предоставить обратную связь, сообщающую об окончании рассечения. Если изменение частоты превышает порог, генератор может не предоставить обратную связь. Возвращаясь к изначальному решению, если наклон частоты меньше, чем первый порог, генератор может определить, превышает ли время, необходимое перед запуском, порог. Время, необходимое перед запуском, может быть равно пороговому периоду времени после выполнения условия наклона частоты перед тем, как генератор выдает обратную связь в виде сообщения об окончании рассечения. Таким образом, например, может корректироваться неустойчивость сигнала наклона частоты. Если время, необходимое перед запуском, прошло, генератор выдает обратную связь в виде сообщения об окончании рассечения. Если нет, обратная связь не выдается.
На ФИГ. 89 представлена логическая схема одного из вариантов алгоритма 3570, использующего модель с несколькими переменными, такую как, например, описанная в настоящем документе нейронная сеть 3150. Алгоритм 3570 описан с точки зрения его выполнения генератором, таким как генераторы 30, 50, 1002, описанные в настоящем документе, однако в некоторых вариантах, может выполняться самим инструментом. Алгоритм 3570 состоит из двух цепочек действий 3571, 3573, которые могут выполняться параллельно. Например, контрольная цепочка 3571 может состоять из действий, направленных на управление ультразвуковым хирургическим инструментом. Таким образом, контрольная цепочка 3571 может быть идентична алгоритмам 3021, 3021', 3021'', 3100, 3120, описанным в настоящем документе. Цепочка условий 3573 может быть идентична алгоритмам отслеживания условий, описанных в настоящем документе касательно ФИГ. 15A-15C, ФИГ. 20-22, ФИГ. 57-60, и т.д.
Обращаясь сначала к цепочке 3571: эта контрольная цепочка может быть идентична алгоритму 3021'', проиллюстрированному на ФИГ. 77. Например, на этапе 3572 генератор может получить запрос активации, подобный запросу активации на этапе 3020, описанному ранее в настоящем документе. На этапе 3574 генератор может приводить в действие концевой зажим на первом уровне мощности в течение первого периода, например, путем подачи первого управляющего сигнала на первом уровне мощности. На этапе 3576 после истечения первого периода генератор может приводить в действие концевой зажим на втором уровне мощности в течение второго периода, причем второй уровень мощности будет ниже, чем первый. Это может быть выполнено, например, путем подачи второго управляющего сигнала на втором уровне мощности. По истечении второго периода, на этапе 3578, генератор может приводить в действие концевой зажим на третьем уровне мощности в течение третьего периода, например, путем подачи третьего управляющего сигнала на третьем уровне мощности. Третий уровень мощности может быть больше, чем второй уровень мощности, и меньше, чем первый уровень или, в некоторых вариантах, может быть равным первому уровню мощности. На этапе 3580 генератор может приводить в действие концевой зажим на уровне управления тепловым процессом либо по истечении третьего периода, либо в соответствии с цепочкой условий 3573, как описано в настоящем документе. Согласно уровню или стадии управления тепловым процессом, генератор может уменьшить энергию, передаваемую концевому зажиму, чтобы замедлить скорость выделения излишнего тепла. Например, в одном из вариантов, начало стадии управления тепловым процессом может означать уменьшение мощности до уровня, составляющего 75% от первого уровня мощности. В дополнение к этому, в некоторых вариантах, уровень или стадия управления тепловым процессом могут означать быстрое линейный рост и/или уменьшение мощности, подаваемой на концевой зажим.
Что касается цепочки условий 3573, генератор может на этапе 3582 выполнить модель с несколькими переменными, такую как нейронная сеть 3150, описанная в настоящем документе, или другую модель с несколькими переменными. На этапе 3584 генератор может определить, достигло ли выходное значение модели определенного порога. Порог может означать истинность или наличие одного или нескольких условий из смоделированного набора условий. Если нет, генератор может продолжить выполнение модели на этапе 3582. Если да, генератор может подождать в течение периода готовности на этапе 3586. По истечении периода готовности генератор может выдать обратную связь (например, звуковую, визуальную или тактильную) на этапе 3588. Обратная связь может сообщить об истинности или наличии обнаруженного условия. На этапе 3590 генератор может подождать в течение периода управления тепловым процессом. Во время ожидания обратная связь, инициированная на этапе 3588, может сохраняться. На этапе 3592 генератор может определить, истекли ли первый и второй периоды времени (см. цепочку 3571). Если да, генератор может изменить мощность, подаваемую на концевой зажим на этапе 3596. Если нет, тогда в некоторых вариантах, генератор может ожидать истечения первого и второго периодов на этапе 3594 перед изменением мощности, подаваемой на концевой зажим 3596. Например, генератор может войти в уровень или стадию управления тепловым процессом.
На ФИГ. 90 представлена схема, иллюстрирующая характер управляющего сигнала 3200 в одном из вариантов, исполнения алгоритма 3170. В примере на ФИГ. 90 первый период времени составляет одну секунду, второй период составляет шестнадцать секунд. Первый уровень мощности равен 100% мощности, вырабатываемой генератором (например, 100% мощности на уровне 5 от генератора GEN 11 производства Ethicon Endo-Surgery, Inc. (Цинциннати, штат Огайо). Второй уровень мощности может составлять 50% от мощности генератора. Третий уровень мощности может составлять 100% от мощности генератора.
Как показано на иллюстрации, при активации концевой зажим может быть приведен в действие на первом уровне мощности, как указано номером 3572 (ФИГ. 89). Концевой зажим затем приводится в действие на втором уровне мощности в течение второго периода и приводится в действие на третьем уровне мощности по окончании второго периода. Модель с несколькими переменными может выдать значение, свидетельствующее об истинности хотя бы одного условия из набора условий в точке с пометкой «порог превышен» (см. 3584 на ФИГ. 89). T4, как показано на ФИГ. 90, может соответствовать периоду времени готовности. По истечении периода времени готовности генератор может предоставить обратную связь, описанную выше касательно блока 3588 на ФИГ. 89. T5, как показано, может соответствовать периоду времени управления тепловым процессом. По его истечении, поскольку первый и второй периоды времени истекли (3194), генератор может изменить уровень управляющего сигнала для концевого зажима (3196), как отмечено точкой с пометкой «управление тепловым процессом активировано». Например, генератор может подавать управляющий сигнал при уровне мощности меньшем или равном первому уровню мощности и большем, чем второй уровень мощности (например, 75% мощности генератора).
На ФИГ. 91 представлена схема, иллюстрирующая характер управляющего сигнала 3202 в еще одном варианта исполнения алгоритма 3570. В примере на ФИГ. 91 временные периоды и уровни мощности такие же, как и на иллюстрации к ФИГ. 90. При активации концевой зажим может быть приведен в действие на первом уровне мощности, как отмечено номером 3572. По истечении первого периода концевой зажим приводится в действие на втором уровне мощности в течение второго периода. На ФИГ. 91, однако, модель с несколькими переменными выдает значение, свидетельствующее об истинности хотя бы одного условия из набора условий в точке с пометкой «порог превышен» перед истечением второго временного периода. Как показано на ФИГ. 89, генератор может ожидать в течение периода времени готовности, а затем выдать обратную связь 3588 в точке с пометкой «обратная связь». По истечении временного периода управления тепловым процессом (3190) второй период все еще не истек. Таким образом, генератор ожидает окончания второго периода (3194) и затем изменяет уровень управляющего сигнала концевого зажима, например, путем реализации описанного в примере уровня управления тепловым процессом при 75% мощности генератора.
На ФИГ. 92 представлена логическая схема, изображающая один из вариантов алгоритма 3210 с использованием модели с несколькими переменными для отслеживания набора условий, содержащего несколько условий. Алгоритм 3210 описан с точки зрения его выполнения генератором, таким как генераторы 30, 50, 1002, описанные в настоящем документе, однако в некоторых вариантах, может выполняться самим инструментом. В варианте, описанном в примере и показанном на ФИГ. 92, набор условий, отслеживаемый моделью с несколькими переменными, состоит из двух условий - условия, связанного с наличием или отсутствием запечатывания ткани и условия, связанного с наличием или отсутствием рассечения ткани. Рассечение ткани может быть полным и/или частичным (например, выполненным на 80%, как описано в настоящем документе). На этапах 3212 и 3214 генератор может отслеживать значения модели, свидетельствующие об истинности или ложности условий запечатывания ткани и рассечения ткани. В некоторых вариантах, и условие запечатывания ткани, и условие рассечения ткани могут отслеживаться одной и той же моделью. Например, нейронная сеть 3150, описанная в настоящем документе, может генерироваться и обучаться с использованием двух выходных узлов 3156. В дополнение к этому, в некоторых вариантах, генератор выполняет отдельные модели, то есть для каждого условия используется отдельная модель.
Если на этапе 3216 условие рассечения выполнено, это может означать, что рассечение произошло, или должно произойти перед запечатыванием. Поскольку это событие может быть нежелательным, генератор может отключить хирургический инструмент на этапе 3528 для предотвращения рассечения перед запечатыванием. На этапе 3222 генератор может находиться в состоянии ожидания на протяжении первого периода. Ожидание в течение первого периода, например, может позволить закончить запечатывание ткани перед тем, как осуществляется рассечение и/или перед тем, как врачу выдается указание открыть концевой зажим и высвободить ткань. Первый временной период может быть заданным временным периодом или, в некоторых вариантах, может зависеть от выходных данных модели, касающихся условия запечатывания. По истечении первого периода генератор может предоставить обратную связь, сообщающую об окончании операции запечатывания и рассечения на этапе 3224. Как вариант, по истечении первого периода генератор может передавать какое-то количество энергии в течение второго периода и затем отключить инструмент и предоставить обратную связь, сообщающую об окончании операции запечатывания и рассечения. Если на этапе 3216 условие рассечения не выполнено, это может означать, что рассечение не должно произойти перед запечатыванием. Генератор может затем определить на этапе 3220, истинно ли условие запечатывания ткани. Если нет, генератор может вернуться к отслеживанию действий 3212, 3210. Если условие запечатывания должно осуществиться, генератор может сгенерировать обратную связь на этапе 3224. В некоторых вариантах, если инструмент все еще активирован на этапе 3224, генератор может отключить инструмент и/или отключить инструмент после периода задержки.
В настоящем документе описаны различные алгоритмы, выполняемые генератором. Однако следует понимать, что в определенных вариантах, описанных в примере, все или часть этих алгоритмов могут выполняться при помощи внутренней логической схемы 2009 хирургического инструмента (ФИГ. 16A). В дополнение к этому, различные алгоритмы, описанные в настоящем документе ранее, используют различные пороговые значения и метки, такие как, например, пороговое сопротивление, временной период времени выше сопротивления, параметр базового отклонения частоты от порога, временной период времени выше дельты частоты, метка отслеживания нагрузки, метка поддержания статуса и т.д. Такие пороги, метки и т.д. могут храниться в любом подходящем месте, например, в генераторе и/или в памяти EEPROM или другом устройстве хранения, которым оснащен хирургический инструмент.
Многофункциональные возможности многих ультразвуковых хирургических инструментов представляют определенную сложность для пользователя с точки зрения удобства доступа к различным функциям и механизмам управления инструментом и работы с ними. Имеется в виду, например, возможность с удобством активировать бранши зажимного механизма и активировать кнопки/переключатели ручного управления, иногда одновременно. Поэтому представляются желательными различные средства управления пользовательского интерфейса. Одна из конструкций пользовательского интерфейса, служащего для управления функциями ультразвукового хирургического инструмента, может включать в себя поворотный механизм между двумя частями устройства, требующими поворотного электрического соединения. Поворотные электрические соединения могут со временем приходить в негодность, требуя дорогого ремонта или замены связанных компонентов инструмента, которые в ином случае могли бы еще прослужить в течение долгого времени. Соответственно, существует необходимость продления срока эксплуатации различных ультразвуковых хирургических инструментов путем поиска альтернативных решений дорогостоящему ремонту и преждевременной замене компонентов.
Для безопасного и эффективного лечения многих медицинских случаев используются ультразвуковые хирургические инструменты, в том числе полые и твердотельные инструменты. Ультразвуковые хирургические инструменты, особенно твердотельные ультразвуковые хирургические инструменты, имеют преимущества, поскольку могут использоваться для разрезания и/или коагуляции ткани с использованием энергии в виде механических вибраций, передаваемой хирургическому концевому зажиму на ультразвуковых частотах. Ультразвуковые вибрации, передаваемые ткани при подходящих уровнях энергии и при использовании подходящего концевого зажима, могут использоваться для разреза, рассечения, коагуляции, отведения или отделения ткани. Твердотельные ультразвуковые хирургические инструменты имеют преимущества в силу количества ультразвуковой энергии, которое может быть передано от ультразвукового датчика посредством волновода для передачи ультразвукового сигнала, хирургическому концевому зажиму. Такие инструменты могут использоваться для выполнения открытых процедур или малоинвазивных процедур, таких как эндоскопия или лапароскопия, когда концевой зажим вводится в место хирургического воздействия через трокар.
Приведение в действие или возбуждение концевого зажима (например, режущего лезвия или шарикового коагулятора) таких инструментов на ультразвуковых частотах вызывает продольные вибрации, которые приводят к локализованному нагреву прилегающей ткани, облегчая и разрезание, и коагуляцию. В силу природы ультразвукового хирургического инструмента конкретный концевой зажим, приводимый в действие с помощью ультразвука, может быть сконструирован таким образом, чтобы выполнять многочисленные функции, в том числе, например, разрезание и коагуляцию.
Ультразвуковая вибрация вызывается в хирургическом концевом зажиме, например, путем возбуждения датчика электрическим способом. Преобразователь может быть выполнен из одного или более пьезоэлектрических или магнитострикционых элементов в ручном блоке инструмента. Вибрации, создаваемые отделом датчика, передаются хирургическому концевому зажиму посредством ультразвукового волновода, идущего от отдела датчика к хирургическому концевому зажиму. Волноводы и концевые зажимы сконструированы таким образом, чтобы резонировать на той же частоте, что и датчик. Когда концевой зажим присоединяется к датчику, частота всей системы может быть такой же, как и у самого датчика. Преобразователь и концевой зажим могут быть сконструированы таким образом, чтобы резонировать на двух разных частотах, а при соединении - резонировать на третьей частоте. В некоторых вариантах амплитуда от нуля до пика продольной ультразвуковой вибрации на кромке d концевого зажима ведет себя как простая синусоида на резонансной частоте, как показано здесь:

где: ω - угловая частота, равная 2π, умноженным на циклическую частоту f; A - амплитуда от нуля до пика. Продольный размах вибраций описан как амплитуда от пика до пика, которая равна двукратной амплитуде синусоидальной волны или 2 A.
Различные варианты ультразвукового хирургического инструмента, описанного в настоящем документе, состоят из первой части и второй части, где вторая часть - поворотная относительно первой. В некоторых вариантах электрическая связь между первой частью и второй частью может обеспечиваться при помощи поворотного электрического соединения. В одном из вариантов первая часть состоит из ультразвуковой рукоятки, в состав которого входит ультразвуковой датчик, имеющий различные конструкции, который может использоваться для вращения вала, идущего от дистального конца рукоятки. Вращение относительно рукоятки может означать вращение относительно второй части, такой как рукояточный блок или иной компонент инструмента, для которого требуется электрическое соединение. Например, в одном варианте вторая часть может представлять собой пользовательский интерфейс. Согласно одному из вариантов, пользовательский интерфейс может быть использован пользователем для передачи инструкций или сигналов между рукояткой, силовым генератором или другим компонентом ультразвуковой хирургической системы. В одном из вариантов инструкции или сигналы, передаваемые через пользовательский интерфейс, могут электрически соединяться посредством поворотного соединения для обеспечения сигналов, которые могут использоваться для управления или предоставления информации, связанной с работой ультразвукового хирургического инструмента. В одном из вариантов пользовательский интерфейс может включать в себя кнопки, переключатели, ручки и другие элементы управления, используемые в этой области техники. В одном из вариантов поворотное электрическое соединение может соединять концевой зажим, который может вращаться относительно другого компонента инструмента, например, рукоятки или рукояточного блока, чтобы обеспечивать электрическую связь между ними.
На ФИГ. 93-94 представлен один вариант ультразвукового хирургического инструмента 4100. Ультразвуковой хирургический инструмент 4100 может использоваться в различных хирургических процедурах, в том числе лапароскопии и традиционных открытых хирургических процедурах. В одном из вариантов ультразвуковой хирургический инструмент 4100 имеет рукояточный блок 4102, продолговатый валоподобный механизм эндоскопа 4110 и ультразвуковой рукоятка 4114, в состав которого входит блок ультразвукового датчика. Рукояточный блок 4102 состоит из пускового механизма 4104, дистального вращающегося механизма 4106 и механизма переключателя 4108. Ультразвуковой рукоятка 4114 электрически соединяется с генератором 4116 посредством кабеля 4118. Продолговатый валоподобный механизм эндоскопа 4110 включает в себя механизм концевого зажима 4112, который состоит из элементов, служащих для рассечения ткани и захвата, разрезания и коагуляции сосудов и/или ткани, а также элементов привода для включения механизма концевого зажима 4112. Несмотря на то, что на ФИГ. 93-94 изображен механизм концевого зажима 4112 для использования при проведении эндоскопических хирургических процедур, ультразвуковой хирургический инструмент 4100 может использоваться в более традиционных открытых хирургических процедурах. В соответствии с целями настоящего документа ультразвуковой хирургический инструмент 4100 описан с точки зрения его использования в эндоскопии; однако, подразумевается, что открытая версия ультразвукового хирургического инструмента 4100 также может иметь такие же или подобные рабочие компоненты и характеристики, как описано в настоящем документе. Информация о дополнительных вариантах, исполнения подобных ультразвуковых хирургических инструментов приведена в общедоступной заявке на патент США № 2009-0105750, которая является неотъемлемой частью настоящего документа по ссылке во всей полноте.
Ультразвуковой датчик ультразвуковой рукоятки 4114 преобразует электрический сигнал от источника питания, такого как генератор ультразвукового сигнала 4116 или аккумулятор (не показан на рисунке), в механическую энергию, в результате чего образуется главным образом стоячая акустическая волна продольного вибрационного движения той части 4152 механизма концевого зажима 4112, где расположены датчик и лезвие, на ультразвуковых частотах. Как показано на ФИГ. 94, рукояточный блок 4102 сконструирован таким образом, чтобы в него мог вставляться рукоятка 4114 с проксимального конца через проксимальное отверстие 4156. В одном из вариантов для того чтобы энергия от ультразвуковой рукоятки подавалась на механизм концевого зажима 4112, который может иметь зажимной рычаг 4150, подвижно соединенный с лезвием 4152, компоненты рукоятки 4114 должны быть акустически соединены с лезвием 4152. В одном из вариантов, ультразвуковой рукоятка 4114 имеет продольно выступающий соединительный элемент с механизмом для присоединения волновода, показанного в виде штифта с резьбой 4133 на ФИГ. 94, на дистальном конце рукоятки 4114 для акустического соединения ультразвуковой рукоятки 4114 с волноводом 4128 (см. ФИГ. 95). Ультразвуковой рукоятка 4114 может механически использовать механизм продолговатого валоподобного эндоскопа 4110 и частей механизма концевого зажима 4112. Например, что касается ФИГ. 94, в одном из вариантов, волновод для передачи ультразвукового сигнала 4128 имеет продольно вытянутый элемент крепления 4129 на проксимальном конце 4131 волновода 4128 для соединения с поверхностью 4166 ультразвуковой рукоятки 4114 при помощи резьбового соединения, такого как штифт 4133. То есть, волновод для передачи ультразвукового сигнала 4128 и ультразвуковой рукоятка 4114 могут механически совмещаться посредством резьбового соединения между ними для сочленения при помощи резьбы и акустического соединения волновода для передачи ультразвукового сигнала 4128 и ультразвуковой рукоятки 4114. В одном из вариантов, когда ультразвуковой рукоятка 4114 вставляется в проксимальное отверстие 4156, ультразвуковой рукоятка 4114 может крепиться к волноводу 4128 с помощью динамометрического ключа. В других вариантах дистальное соединение волновода может защелкиваться на проксимальном конце волновода для передачи ультразвукового сигнала 4128. Ультразвуковой рукоятка 4114 также имеет дистальный край 4158 с круговым выступом 4160 для совмещения с рукояткой 4102 через проксимальное отверстие 4156. Как более подробно объясняется ниже, дистальный край 4158 может иметь один или более электрических контактов для электрического соединения с рукояточным блоком 4102, например, для получения инструкций по электрическому управлению работой от пользователя через рукояточный блок 4102.
В одном из вариантов рукояточный блок 4102 имеет спусковой механизм 4120 и неподвижную ручку 4122. Неподвижная ручка 4122 может составлять одно целое с рукояточным механизмом 4102, а спусковой механизм 4120 может двигаться относительно неподвижной ручки 4122. Спусковой механизм 4120 движется в направлении 4121a к неподвижной ручке 4122, когда пользователь прилагает силу нажатия к спусковому крючку 4120. Спусковой механизм 4120 может быть наклонен в направлении 4121b, чтобы спусковой механизм 4120 двигался в направлении 4121b, когда пользователь применяет силу нажатия к спусковому крючку 4120. Описанный в примере спусковой механизм 4120 включает в себя также спусковой крючок 4124 для обеспечения дополнительного элемента управления, с помощью которого может работать спусковой механизм 4120.
На ФИГ. 95 изображен рукояточный блок в поперечном разрезе согласно различным вариантам. Рукояточный блок 4102 включает в себя спусковой крючок 4120, который способен двигаться в направлениях 4121a и 4121b относительно неподвижного спускового механизма 4122. Спусковой механизм 4120 совмещен с рычажным механизмом для сообщения вращательного движения спусковому механизму 4120 в направлениях 4121a и 4121b для линейного движения трубчатого элемента привода с возвратно-поступательным движением 4138 вдоль продольной оси «T». Спусковой механизм 4120 имеет первый набор выступов 4182 с отверстиями для первого шарнирного пальца 4176a. Первый шарнирный палец 4176a также помещается на место при помощи ряда отверстий, выполненных на дистальном конце вилки 4174. Спусковой механизм 4120 также имеет второй набор выступов 4180 для закрепления первого конца 4176a соединительного звена 4176. Когда спусковой механизм 4120 поворотно вращается, вилка 4174 движется горизонтально вдоль продольной оси «T». Так, обращаясь к ФИГ. 93, когда спусковой механизм 4120 приводится в движение нажатием в направлении 4121a, трубчатый элемент привода с возвратно-поступательным движением 4138 движется в направлении 4146a и закрывает бранши, состоящие из зажимного рычага 4150 и лезвия 4152 механизма концевого зажима 4112. Когда спусковой механизм 4120 освобожден, он может быть наклонен по направлению 4121B, когда нажатие не производится. Соответственно, хомут 4174 и трубчатый элемент привода с возвратно-поступательным движением 4138 двигаются в направлении 4146b и открывают бранши механизма концевого зажима 4112. в некоторых вариантах, исполнения пружина 5051 (ФИГ. 105) расположена между вилкой 4174 и рукояточным блоком 4102. Пружина 5051 переводит спусковой механизм 4120 в открытую позицию, как показано на ФИГ. 95.
В дополнение к уже описанному, дистальный механизм вращения 4106 может располагаться на дистальном конце рукояточного блока 4102, когда ультразвуковой рукоятка 4114 соединен механически и акустически с рукояточным блоком 4102. В одном из вариантов дистальный механизм вращения 4106 имеет ручку в виде кольца или воротника 4134. Дистальная ручка вращения 4134 предназначена для механического соединения или соединения с помощью трения с ультразвуковым рукояткой 4114. Как говорилось ранее, ультразвуковой рукоятка 4114 механически соединяется с механизмом продолговатого валоподобного эндоскопа 4110. Так, при повороте поворотной ручки 4134 происходит вращение ультразвуковой рукоятки 4114 и механизма продолговатого валоподобного эндоскопа 4110 в одном и том же направлении 4170.
В различных вариантах, ультразвуковой хирургический инструмент 4100 может иметь один или более пользовательских интерфейсов для выдачи инструкций по электрическому управлению для управления работой инструмента 4100. Например, в одном из вариантов пользователь может использовать ножной переключатель 4111 для активации подачи питания на ультразвуковой рукоятка 4114. в некоторых вариантах, ультразвуковой хирургический инструмент 4100 имеет один или более переключателей для установки электропитания, служащих для активации ультразвуковой рукоятки 4114 и/или для осуществления одной или более настроек питания ультразвуковой рукоятки 4114. На ФИГ. 93-95 изображены рукояточные механизмы 4102 с механизмом переключателя 4108. Механизм переключателя 4108 может иметь пользовательский интерфейс, связанный с рычажным переключателем или тумблером 4132a, 4132b, например. В одном из вариантов, механизм переключателя 4108 может быть хотя бы частично связан с рукояточным блоком 4102 и может быть реализован в виде рычажного переключателя или тумблера с позициями МИН/МАКС. В одной позиции тумблер (или рычажный переключатель) с позициями МИН/МАКС 4132a, 4132b может представлять собой легкодоступный регулятор для активации питания. Например, пользователь также может использовать первый выступающий регулятор 4132a для установки мощности на первый уровень (например, МАКС) и может при помощи второго выступающего регулятора 4132b установить мощность на второй уровень (например, МИН). Рычажный переключатель 4132a, 4132b может быть соединен с генератором 4116 для управления работой инструмента, например, активации или подачи питания на ультразвуковой рукоятке 4114. Соответственно, в различных вариантах, рычажный переключатель 4132a, 4132b и генератор 4116 могут соединяться электрически при помощи вращающегося соединения. Например, в определенных вариантах, хирургический инструмент 4100 может иметь поворотное электрическое соединение, благодаря которому возможны операции по управлению электропитанием, подаваемым нa рукоятку 4102 для электрической связи с генератором 4116 посредством ультразвуковой рукоятки 4114. Рычажный переключатель 4132a, 4132b может иметь переключатель управления и/или ключ активизации, электрически соединенный с электронной платой, например, печатной платой, гибкой платой, жестко-гибкой платой или другой подходящей структурной единицей. В одном из вариантов, механизм переключателя 4108 имеет рычажный переключатель с первым электрическим контактом 4132a и вторым электрическим контактом 4132b, предназначенными для модулирования настроек мощности ультразвуковой рукоятки 4114 между минимальным уровнем мощности (например, МИН) и максимальным уровнем мощности (например, МАКС). Рычажный переключатель может быть электрически соединен с частью схемы, отвечающей за рукоятку, которая может включать в себя, например, гибкую схему, предназначенную для электрического соединения с генератором 4116 посредством вращательного соединения, проходящего через рукоятку 4114 для управления активацией ультразвуковой рукоятки 4114. В различных вариантах, механизм переключателя 4108 имеет один или более переключателей настроек электропитания, служащих для активации ультразвуковой рукоятки 4114 для выполнения одной или более настроек питания ультразвуковой рукоятки 4114.
Специалисты в этой области поймут, что генератор 4116 может подавать питание для активации на ультразвуковой рукоятка 4114, например, по кабелю 4118. Как говорилось ранее, рукояточный блок 4102 может с удобством использоваться для передачи инструкций по управлению электропитанием на генератор 4116 для управления подачей питания на ультразвуковой рукоятка 4114, например, с помощью одного или более переключателей, связанных с механизмом переключателя 4108. В процессе работы, например, один или более переключателей 4108 могут иметь электрическую связь с генератором 4116 для управления подачей электропитания и/или характеристиками работы электропитания ультразвукового хирургического инструмента 4100. Следует понимать, что по крайней мере в одном варианте генератор 4116 может находиться внутри рукоятки 4114.
Как сказано выше, ультразвуковой рукоятка 4114 может вращаться относительно рукояточного блока 4102 или его компонента при помощи дистального регулятора вращения 4134, для вращения волновода, служащего для передачи ультразвукового сигнала 4128 и помещения механизма концевого зажима 4112 в нужное положение при проведении хирургической процедуры. Соответственно, в различных вариантах, ультразвуковой рукоятка 4114 может быть электрически соединен в одной или более точках с операциями управления электропитанием рукояточного блока 4102. Например, в определенных вариантах, хирургический инструмент может иметь поворотное электрическое соединение, благодаря которому операции по управлению электропитанием рукояточного блока 4102 могут иметь электрическую связь с генератором 4116 посредством ультразвуковой рукоятки 4114. То есть, в одном из вариантов, рукояточный блок 4102 и ультразвуковой рукоятка 4114 электрически соединены при помощи поворотного электрического соединения модуля коннектора 4190.
На ФИГ. 96 изображен модуль коннектора согласно различным вариантам. Модуль коннектора 4200 изображен в соединении с гибкой платой 4202 и дистальной частью 4204 рукоятки 4114, который также показан отдельным видом в пунктирной рамке. Модуль коннектора 4200 имеет корпус 4206 и поворотный соединительный элемент 4208. На рисунке это не отображено, но модуль коннектора 4200 и ультразвуковой рукоятка 4114 могут быть расположены в отверстии 4156 рукояточного блока 4102 таким образом, чтобы ультразвуковой рукоятка 4114 или волновод 4128 располагались в центральном отверстии 4210, определяемом корпусом 4206, а дистальная часть 4204 рукоятки таким образом входила бы в модуль коннектора 4200 и крепилась в нем. Как описано выше, ультразвуковой рукоятка 4114 может соединяться механически и акустически с волноводом 4128, который может быть сконструирован таким образом, чтобы функционально соединяться с механизмом концевого зажима 4112. Ультразвуковой рукоятка 4114 также может вращаться относительно корпуса 4206 модуля коннектора 4200, который обеспечивает вращательное электрическое соединение между ультразвуковым рукояткой 4114 и схемой управления или пользовательского интерфейса, в которую входит пользовательский интерфейс, чтобы механизм переключателя 4108 был функционально связан с гибкой схемой 4202.
В варианте, изображенном на иллюстрации, схема управления или пользовательского интерфейса имеет гибкую схему 4202. Например, вращающееся электрическое соединение может иметь электрическую связь или проводящий тракт, по которому инструкции или сигналы управления электропитанием, передаваемые пользователю на пользовательский интерфейс, например, с помощью механизма переключателя 4108, могут электрически соединяться с генератором 4116, например, с помощью ультразвуковой рукоятки 4114. Соответственно, инструкции или сигналы управления электропитанием могут приниматься генератором 4116, который откликается изменением мощности, подаваемой на ультразвуковой рукоятка 4114 для управления работой инструмента 4100. В дополнение к вышесказанному, механизм переключателя 4108 может иметь или электрически соединяться с гибкой схемой 4202, которая, в свою очередь, может служить для обеспечения электромеханического интерфейса между переключателями 4132a, 4132b и генератором 4116 с помощью рукоятки 4114. Например, гибкая схема 4202 может иметь одну или более точек переключения 4202a, 4202b, предназначенных для механической активации посредством рычажных переключателей 4132a, 4132b. В одном из вариантов, гибкая схема 4202 может иметь переключатели электрических контактов, такие как куполоподобные выключатели, при нажатии которых электрический сигнал передается генератору 4116. Гибкая схема 4202 может иметь один или более проводников, таких как проводящие тракты, в общем виде показанные под номером 4211, которые могут быть реализованы с помощью проводов, дорожек или иных проводящих трактов, известных в данной области техники. Проводящие тракты могут электрически соединяться с одним или более проводников или кольцевых проводников 4212, 4214, как показано в укрупненном виде модуля коннектора 4200 на ФИГ. 97. Гибкая схема 4202 может соединяться с кольцевыми проводниками 4212, 4214 с помощью одного или более подводящих контактов 4216, 4218 или «ушек» соответствующих кольцевых проводников 4212, 4214 (описанных далее). Следует понимать, что в то время как проводники переключателей обычно называются в настоящем документе кольцевыми проводниками 4212, 4214, которые в общем смысле означают дугообразные структуры или тела, которые могут иметь один или более проводящих трактов, в различных формах проводники переключателей могут иметь другие структуры, такие как дугообразные дорожки, например.
Модуль коннектора 4200 имеет внешний кольцевой проводник 4212 и внутренний кольцевой проводник 4214. Внешний кольцевой проводник 4212 и внутренний кольцевой проводник 4214 представляют собой сквозную O-образную структуру и могут быть выполнены с возможностью вращения относительно рукоятки 4114. Внешний и внутренний кольцевые проводники 4212, 4214 могут также иметь проводящий соединительный элемент, например, подводящий контакт 4216, 4218, который может электрически соединяться с гибкой схемой 4202 с помощью одного или более проводящих трактов 4211, таким образом обеспечивая проводящий тракт к модулю коннектора 4200 для обеспечения поворотного электрического соединения с генератором 4116 через рукоятка 4114. Соответственно, схема управления может находиться там, где модуль коннектора 4200 обеспечивает поворотное электрическое соединение между пользовательским интерфейсом, например, механизмом переключателя 4108 и рукояткой 4114.
Что касается ФИГ. 97 в целом, в различных вариантах, одно или более соединительных элементов 4220, 4222a, 4222b могут располагаться таким образом, чтобы быть подвижными относительно части кольцевого проводника 4212, 4214, имеющего проводящий тракт. Например, соединительный элемент 4220, 4222a, 4222b может поворотно крепиться к ультразвуковому ручному блоку 4114, когда рукоятка 4114 проходит через отверстие 4156 для совмещения с модулем коннектора 4200. Вращение ультразвуковой рукоятки 4114 в направлении 4170 (см. ФИГ. 93) может вызывать соответствующее вращение соединительного элемента 4220, 4222a, 4222b вокруг продольной оси «T» относительно соответствующего кольцевого проводника 4212, 4214 между первой и второй позициями. Соединительный элемент 4220, 4222a, 4222b может иметь один или более проводящих контактов 4224a, 4224b, 4226a, 4226b, расположенных так, чтобы иметь электрический контакт с соответствующим кольцевым проводником 4212, 4214, когда соединительный элемент 4220, 4222a, 4222b находится в первой и второй позициях. Соединительный элемент 4220, 4222a, 4222b также может иметь один или более контактов с рукояткой 4228a, 4228b, 4230a, 4230b, служащих для электрического контакта с дистальной поверхностью 4232a, 4232b, 4234a, 4234b дистальной части 4204 ультразвуковой рукоятки 4114, когда соединительный элемент 4220, 4222a, 4222b находится в первой и второй позициях.
В дополнение к вышесказанному, в различных вариантах, соединительные элементы 4220, 4220a, 4220a могут быть выполнены с возможностью вращения относительно соответствующего кольцевого проводника 4212, 4214. Контакты кольцевого проводника 4224a, 4224b, 4226a, 4226b могут быть выполнены с возможностью вращения вокруг или вдоль поверхности кольцевых проводников 4212, 4214, когда рукоятка 4114 вращается относительно корпуса 4206. В одном из вариантов, кольцевые проводники 4212, 4214 имеют дугообразные поверхности или дорожки, вокруг которых контакты кольцевых проводников 4224a, 4224b, 4226a, 4226b могут, вращаясь, контактировать по дугообразной траектории, идущей от или проходящей между первой и второй позициями. Например, в некоторых вариантах, контакты кольцевых проводников 4224a, 4224b, 4226a, 4226b могут иметь прижимные контакты для контактирования с соответствующим кольцевым проводником 4212, 4214 вдоль дугообразного проводящего тракта. В одном из вариантов, один или более соединительных элементов 4220, 4222a, 4222b составляют натяжной элемент, такой как подпружиненный рычаг 4236a, 4236b, 4238a, 4238b, для натяжения или наклонения одного или более контактов кольцевого проводника 4224a, 4224b, 4226a, 4226b по направлению к кольцевому проводнику 4212, 4214 в целях поддержания электрического соединения с кольцевым проводником 4212, 4214, когда соединительный элемент 4220, 4222a, 4222b вращается относительно кольцевого проводника 4212, 4214. В определенных вариантах, контакты кольцевого проводника 4224a, 4224b, 4226a, 4226b могут быть наклонены по отношению к внутренней или внешней поверхности кольцевого проводника 4212, 4214 так, что кольцевой проводник может электрически соединять соединительный элемент 4220, 4222a, 4222b с кольцевым проводником 4212, 4214 по одному или более отрезкам дугообразной траектории, связанной с ультразвуковым рукояткой и/или соответствующим соединительным элементом 4220, 4222a, 4222b. В других вариантах, например, соединительный элемент 4212, 4214 может иметь контакт концевого проводника 4224a, 4224b, 4226a, 4226b, который может совмещаться с кольцевым проводником 4212, 4214 по проводящему тракту через крючкообразный или петлеобразный элемент около или вокруг кольцевого проводника 4212, 4214.
Что касается ФИГ. 98 в общем смысле, иллюстрирующего функциональное устройство соединительных элементов 4220, 4222a, 4222b и соответствующего кольцевого проводника 4212, 4214, модуль коннектора может иметь внешний кольцевой проводник 4212 и внутренний кольцевой проводник 4214. В различных вариантах, каждый кольцевой проводник 4212, 4214 может также определять проводящий тракт вдоль дугообразной части кольцевого проводника 4212, 4214. Внешний соединительный элемент 4220 предназначен для вращения относительно или вокруг внешнего кольцевого проводника 4212. Внутренний соединительный элемент 4222a, 4222b подобным образом может предназначаться для вращения относительно или вокруг внутреннего кольцевого проводника 4214. Например, внешний кольцевой проводник 4212 и внутренний кольцевой проводник 4214 могут иметь проводящие контакты 4216, 4218, предназначенные для электрического соединения с гибкой схемой 4202 посредством пазов 4242, 4244 в корпусе 4206. В одном из вариантов, проводящие контакты 4216, 4218 могут по крайней мере частично удерживать внешний кольцевой проводник 4212 и внутренний кольцевой проводник 4214, таким образом допуская вращение относительно соединительных элементов 4220, 4222a, 4222b. Все соединительные элементы 4220, 4222a, 4222b могут иметь один или более проводящих контактов 4224a, 4224b, 4226a, 4226b, расположенных так, чтобы иметь электрический контакт с соответствующим кольцевым проводником 4212, 4214, когда соединительный элемент 4220, 4222a, 4222b находится в первой и второй позициях. Соединительный элементы 4220, 4222a, могут иметь один или более контактов с рукояткой 4228a, 4228b, 4230a, 4230b, служащих для электрического контакта с дистальной поверхностью 4232a, 4232b, 4234a, 4234b дистальной части 4204 ультразвуковой рукоятки 4114. Например, контакты кольцевого проводника 4224a, 4224b, 4226a, 4226b могут быть выполнены с возможностью вращения вокруг продольной оси между первой и второй позициями, так что контакты кольцевого проводника 4224a, 4224b, 4226a, 4226b поддерживают электрический контакт с соответствующим кольцевым проводником 4212, 4214 при вращении.
Внешний соединительный элемент может иметь пару контактов кольцевого проводника 4224a, 4224b, которые могут быть соединены с подпружиненными рычагами 4236a, 4236b и пригибать контакты 4224a, 4224b по направлению к внутренней поверхности внешнего кольца 4212. В одном из вариантов, внутренний соединительный элемент 4214 имеет пару контактов кольцевого проводника 4226a, 4226b, соединенных с подпружиненными рычагами 4238a, 4238b, предназначенными для пригибания контактов 4226a, 4226b по направлению к внешней поверхности внутреннего кольца 4214. Внутренний соединительный элемент 4222a, 4222b имеет первую деталь 4222a и вторую деталь 4222b, однако, в определенных вариантах, внутренний соединительный элемент 4222a, 4222b может представлять собой единую структуру. Например, внутренний соединительный элемент 4222a, 4222b может иметь проводящую или непроводящую часть, находящуюся между парой контактов кольцевого проводника 4226a, 4226b.
Как было сказано выше, в различных вариантах, модуль коннектора 4202 имеет один или более соединительных элементов 4220, 4222a, 4222b, расположенных так, чтобы осуществлять вращение относительно рукояточного блока, корпуса 4206, пользовательского интерфейса 4108, спускового механизма 4120 и/или проводящего тракта, связанного с кольцевым проводником 4212, 4214 (см. ФИГ. 94, 98-99). Согласно различным вариантам, соединительные элементы 4220, 4222a, 4222b имеют один или более контактов для соединения с рукояткой 4228a, 4228b, 4230a, 4230b, предназначенных для зацепления и электрического соединения дистальной части 4204 ультразвуковой рукоятки 4114 (ФИГ. 96). В одном из вариантов, контакты для соединения с рукояткой 4228a, 4228b, 4230a, 4230b могут иметь зацепляющий элемент, предназначенный для зацепления дистальной части 4204 ультразвуковой рукоятки 4114 для по меньшей мере частичного поворотного соединения соответствующего соединительного элемента 4220, 4222a, 4222b с ультразвуковым рукояткой 4114.
В одном из вариантов, внешний соединительный элемент 4220 имеет пару внешних контактов для соединения с рукояткой 4228a, 4228b, электрически соединенных с парой контактов внешнего кольца 4224a, 4224b для обеспечения электрически проводящего тракта от дистальной части рукоятки к внешнему кольцевому проводнику 4212.Каждый из пары контактов для соединения с рукояткой 4228a, 4228b выполнен так, чтобы проходить через соответствующий паз 4246a, 4246b во вращающемся соединительном элементе 4210. Как более подробно объясняется далее, вращающийся соединительный элемент 4210 может соединяться с вращательным элементом ультразвуковой рукоятки 4114. Например, в различных вариантах, вращающийся соединительный элемент 4210 выполнен таким образом, чтобы обеспечивать возможность совмещать вращение ультразвуковой рукоятки 4114 с соединительными элементами 4220, 4222a, 4222b.
Пара контактов для соединения с рукояткой 4228, 4228b, проиллюстрированная на ФИГ. 98, имеют изогнутые выступы, предназначенные для зацепления и электрического соединения с одним или более электрическими контактами, расположенными вдоль первой дистальной поверхности 4232a, 4232b ультразвуковой рукоятки 4114. Как показано, изогнутые выступы пары внешних контактов для соединения с рукояткой 4228a, 4228b могут использоваться хотя бы для частичного способствования соединению вращения ультразвуковой рукоятки 4114 для передачи соответствующего вращения внешнему соединительному элементу 4220. Например, изогнутые выступы могут иметь зацепляющий элемент с краем, который при помощи трения совмещается с первой дистальной поверхностью 4232a, 4232b либо помещается внутри желоба или края на первой дистальной поверхности 4232a, 4232b для вращательного соединения ультразвуковой рукоятки 4114 и вращающегося соединительного элемента 4210. В определенных вариантах, внешние контакты для соединения с рукояткой 4228a, 4228b расходятся от натяжных элементов или подпружиненных рычагов 4248a, 4248b, предназначенных для пригибания или натяжения внешних контактов для соединения с рукояткой 4228a, 4228b наружу от продольной оси «T» и/или по направлению к первой дистальной поверхности 4232a, 4232b. В одном из вариантов, внешний соединительный элемент 4220 имеет один или более язычков 4250a, 4250b, таких как выступы или пистоны крепления, служащие для удержания соединительного элемента 4220. Например, первый язычок 4250a может входить в паз 4252, имеющийся во вращающемся соединительном элементе 4208, а второй язычок 4250b может соединяться зажимом и/или прижиматься к части вращающегося соединительного элемента 4208 для удержания положения или ориентации соединительного элемента 4220 (ФИГ. 100).
В одном из вариантов, внутренний соединительный элемент 4222a, 4222b имеет пару внутренних контактов 4230a, 4230b для соединения с рукояткой, электрически соединенных с парой контактов внутреннего кольца проводника 4226a, 4226b для обеспечения электрически проводящего тракта от ультразвуковой рукоятки к внутреннему кольцевому проводнику 4214. Пара внешних контактов для соединения с рукояткой 4230a, 4230b выполнены таким образом, чтобы проходить через паз 4254a, 4254b во вращающемся соединительном элементе 4210 и имеют изогнутые выступы, ограничивающие края, предназначенные для зацепления и электрического соединения с одним или более электрических контактов, расположенных вдоль второй дистальной поверхности 4234a, 4234b дистальной части 4204 ультразвуковой рукоятки 4114. Как показано, изогнутые выступы могут использоваться хотя бы для частичного способствования соединению вращения ультразвуковой рукоятки 4114 (ФИГ. 96) для передачи соответствующего вращения внутреннему соединительному элементу 4222a, 4222b. Например, изогнутые выступы могут иметь зацепляющие элементы для совмещения со второй дистальной поверхностью 4234a, 4234b при помощи трения либо помещается внутри желоба или края на второй дистальной поверхности 4234a, 4234b для вращательного соединения с вращением ультразвуковой рукоятки 4114. В различных вариантах, внутренние контакты для соединения с рукояткой 4230a, 4230b выступают из натяжных элементов, имеющих подпружиненные рычаги 4258a, 4258b, служащие для отгибания или растяжения контактов для соединения с рукояткой 4230a, 4230b наружу относительно продольной оси «T» и/или по направлению ко второй дистальной поверхности 4234a, 4234b рукоятки 4114. В различных вариантах, внутренний соединительный элемент 4220a, 4220b также имеет один или несколько язычков 4256a, 4256b для удерживания соединительного элемента в нужной ориентации. Например, внутренний соединительный элемент 4220a, 4220b может иметь первый язычок 4256a и второй язычок 4256b. Первый и второй язычки 4256a, 4256b могут быть выполнены таким образом, чтобы проходить в паз, имеющийся во вращательном соединительном элементе 4210 или пристегиваться и/или прижиматься к участку вращательного соединительного элемента 4210 (отсутствует на иллюстрации).
В различных вариантах, дистальная часть 4204 ультразвуковой рукоятки 4114 может иметь одну или несколько дистальных контактных поверхностей 4232a, 4232b, 4234a, 4234b, показанных в общем виде в пунктирной рамке на ФИГ. 96. Дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b могут обеспечивать электрические контакты или контактные точки, которые могут электрически соединяться с кольцевыми проводниками 4212, 4214 с помощью соединительных элементов 4220, 4222a, 4222b. в некоторых вариантах, электрическое соединение рукоятки 4114 с кольцевыми проводниками 4212, 4214 может замыкать электрическую цепь, в которую входит схема пользовательского интерфейса, такая как гибкая схема 4202 и генератор 4116, как описано ранее.
В одном из вариантов, рукоятка 4114 может иметь дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b, расположенные на или внутри дистального края 4205, расположенного вдоль дистальной части 4204 рукоятки 4114. Дистальный край 4205 может ограничивать один или несколько желобов, ограничивающих дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b, имеющие один или несколько электрических контактов или контактных поверхностей. Контактные поверхности могут иметь, например, гальваническое золочение или иной подходящий электрически проводящий материал, известный в данной области техники. В одном из вариантов, данный дистальный край 4205 может ограничивать продольные или круговые желоба с размерами, подходящими для того чтобы дополнять или вмещать в себя контакты для соединения с рукояткой 4228a, 4228b, 4230a, 4230b. Например, дистальный край 4205 может иметь один или несколько желобов вдоль дистальных контактных поверхностей 4232a, 4232b, 4234a, 4234b для зацепления соответствующего соединительного контакта рукоятки 4228a, 4228b, 4230a, 4230b, таких как дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b и соответствующие соединительные контакты рукоятки 4228a, 4228b, 4230a, 4230b могут соединяться с помощью трения, электрически или поворотно, когда в модуль коннектора 4200 вставляется рукоятка 4114. В одном из вариантов, дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b и соответствующие соединительные контакты рукоятки 4228a, 4228b, 4230a, 4230b могут соединяться при помощи охватывающего и вставного узлов разъема либо способом типа «ключ и замок». В определенных вариантах, дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b имеют один или несколько круговых выступов, идущих по внутреннему кольцу дистального края 4205 для электрического соединения с соответствующими соединительными контактами рукоятки 4228a, 4228b, 4230a, 4230b по всем или части круговых выступов. В различных вариантах, дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b имеют гальванически золоченые круговые электрические контакты, расположенные на круговых выступах на внутренней поверхности дистального края 4205, как показано на ФИГ. 96.
Дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b могут электрически соединяться с генератором 4116 по контактам, идущим по ручному блоку 4114 и проводу 4118 для передачи электрических сигналов управления от пользовательского интерфейса, например, механизма переключателя 4108, для управления работой ультразвукового хирургического инструмента 4100. Соответственно, в одном из вариантов, гибкая схема 4202 может предназначаться для связи с переключателями 4132a, 4132b и подачи электрических сигналов по проводящим трактам 4211 к проводящим контактам 4216, 4218, которые, в свою очередь, обеспечивают электрическое соединение с соединительными элементами 4220, 4222a, 4222b при помощи кольцевых проводников 4212, 4214, которые, в свою очередь, электрически соединяются при помощи соединительных контактов рукоятки 4228a, 4228b, 4230a, 4230b с дистальными контактными поверхностями 4232a, 4232b, 4234a, 4234b, расположенными в дистальной части ультразвуковой рукоятки 4114 для обеспечения проводящего тракта к генератору 4116 через ультразвуковой рукоятка 4114 и кабель 4118.
Согласно различным вариантам, модуль коннектора 4202 имеет вращающийся центр 4240. Вращающийся центр может выходить из корпуса 606 по продольной оси «T» и иметь центральный стержень 4210, расположенный по продольной оси «T», размеры которого позволяют вставить в него рукоятка 4114 по длине и/или волновод 4128. Как показано на ФИГ. 96-97, вращающийся центр выходит проксимально из корпуса 4206 вдоль продольной оси «T». Вращательный соединительный элемент 4208 поворотно закреплен на вращающемся центре 4240 для вращения вокруг продольной оси «T» относительно корпуса 4206. В определенных вариантах, вращающийся центр 4240 имеет один или более фиксирующих конструктивных элементов 4260a, 4260b, служащих для фиксации и ограничения продольного отклонения от оси вращательного соединительного элемента 4208.
На ФИГ. 99 изображены кольцевые проводники 4212, 4214, закрепленные или иным способом размещенные на корпусе 4206, так что рукоятка 4114 может вращаться относительно кольцевых проводников 4212, 4214. Одна или более частей кольцевых проводников 4212, 4214 может выходить через пазы, имеющиеся в корпусе 4206 для обеспечения соединения с корпусом 4206. Как описано выше, кольцевые проводники 4212, 4214 могут иметь контакты 4216, 4218, проходящие через пазы 4242, 4244, имеющиеся в корпусе. Как показано на ФИГ. 97 и ФИГ. 99, внешний кольцевой проводник 4212 включает в себя два язычка 4262a, 4262b, подогнанных для того, чтобы вставляться в два удерживающих паза 4264a, 4264b, имеющихся в корпусе 4206. В различных вариантах, кольцевые проводники 4212, 4214 и/или корпус могут иметь дополнительные крепежные элементы, такие как крючки, замки, зажимы или связующие субстанции, например, которые могут использоваться для помещения кольцевых проводников 4212, 4214 близко к корпусу 4206 для обеспечения вращения ультразвуковой рукоятки 4114 и кольцевых проводников 4212, 4214 относительно друг друга. На ФИГ. 99 внутренний кольцевой проводник 4214 имеет внутреннее кольцо 4266 (см. ФИГ. 97), надевающееся на поверхность 4268, выступающую от корпуса 4206. В одном из вариантов, внутренний кольцевой проводник 4212 может крепиться при помощи трения и/или связующего вещества к поверхности 4268.
На ФИГ.100 изображен перспективный вид дистальной части вращающегося соединительного элемента 4210 с размещенным в нем внутренним и внешним кольцевыми проводниками 4212, 4214 и соответствующими внутренним и внешним соединительными элементами 4220, 4222a, 4222b. Вращающийся соединительный элемент 4210 имеет множество внутренних пазов, в которые вставляются и там фиксируются внутренний и внешний соединительные элементы 4220, 4222a, 4222b. Следует понимать, что различные варианты могут иметь конфигурацию пазов, отличную от приведенной на ФИГ. 100. Например, в различных вариантах, вращающийся соединительный элемент может содержать позиционирующие выступы для размещения соединительных элементов. В одном из вариантов, один или более участков соединительных элементов 4220, 4222a, 4222b могут быть присоединены к вращающемуся соединительному элементу с помощью клеящего вещества. В варианте, изображенном на иллюстрации, вращающийся соединительный элемент имеет внешний паз 4270a, 4270b, 4270c, в который вставляется внешний кольцевой проводник 4212. Внешний слот 4270a, 4270b, 4270c может иметь размеры, при которых возможно вращение вращающегося соединительного элемента 4210 и внешнего кольцевого проводника 4212 относительно друг друга. Вращающийся соединительный элемент 4210 также может иметь паз 4280, в который вставляется внешний соединительный элемент 4220. Паз 4280 направлен внутрь по продольной оси «T» (см. ФИГ. 96) относительно внешнего паза 4270a, 4270b, 4270c. Паз 4280 имеет пазы для подпружиненных рычагов 4282a, 4282b, размеры которых позволяют вставлять в них подпружиненные рычаги 4236a, 4248a и 4236b, 4248b, соответственно. Примыкающий к пазам для подпружиненных рычагов 4282a, 4282b, паз 4280 имеет пазы 4284a, 4284b, в которые вставляются контакты внешнего кольцевого проводника 4224a, 4224b, соответственно. Паз 4280 также имеет пазы 4286a, 4286b, в которые вставляются внешние контакты соединительного элемента рукоятки 4228a, 4228b и которые проксимально ориентированы к пазам 4246a, 4246b (паз 4246b показан на ФИГ. 96). Вращающийся соединительный элемент 4210 может также иметь паз 4296b, в который вставляется внутренний кольцевой проводник 4214, и паз 4281, в который вставляется внутренний соединительный элемент 4222a, 4222b. Паз 4281 направлен внутрь по продольной оси «T» (см. ФИГ. 96) относительно пазов для подпружиненных рычагов 4288a, 4288b и имеет размеры, позволяющие помещать в него подпружиненные рычаги 4238a, 4238b, соответственно. Примыкающее к одному концу каждого из пазов для подпружиненных рычагов 4288a, 4288b, вращающийся соединительный элемент имеет паз для контакта внутреннего кольца 4290a, 4290b, в который вставляются контакты внутреннего кольца 4226a, 4226b, соответственно. Примыкающий ко второму концу каждого из пазов для подпружиненных рычагов 4288a, 4288b, вращающийся соединительный элемент имеет пазы 4292a, 4292b, в которые вставляются внутренние соединительные контакты рукоятки 4230a, 4230b соответственно и проксимально ориентирован к пазам 4254a, 4254b (паз 4254b показан на ФИГ. 96).
Вращающийся соединительный элемент также имеет стержень 4294, который надевается на вращающийся центр 4240. Проксимальная внутренняя круговая поверхность 4296a вращающегося соединительного элемента содержит часть стержня 4294, который имеет меньший диаметр по сравнению с более дистальной внутренней круговой поверхностью, имеющей паз 4296b. Меньший диаметр проксимальной внутренней круговой поверхности, имеющей паз 4296a, может уменьшить трение вращения вокруг вращающегося центра 4240 и обеспечить дополнительное пространство для компонентов, таких как кольцевые проводники 4212, 4214 и соединительные элементы 4220, 4222a, 4222b, которые помещаются вокруг вращающегося центра 4240 внутри вращающегося соединительного элемента 4210. Вращающийся соединительный элемент 4210 также имеет проксимальную внутреннюю круговую поверхность 4298a, имеющую меньший диаметр по сравнению с дистальной внешней круговой поверхностью 4298b. Меньший диаметр дистальной внешней круговой поверхности 4298a может обеспечить дополнительное пространство для компонентов, таких как кольцевые проводники 4212, 4214 и соединительные элементы 4220, 4222a, 4222b, которые помещаются вокруг вращающегося центра 4240 внутри вращающегося соединительного элемента 4210. Следует понимать, что могут использоваться дополнительные кольцевые проводники и соединительные элементы, чтобы, например, создать дополнительные вращательные электрические соединения.
На ФИГ. 101-103 изображен модуль коннектора 4300 согласно различным вариантам. В одном из вариантов, модуль коннектора может использоваться в ультразвуковом хирургическом инструменте подобно тому, как сказано в описании к ФИГ. 96-99. Поэтому, в целях краткости изложения, одинаковые детали могут обозначаться одинаковыми номерами и описываться не так подробно. Однако, следует понимать, что различные детали могут использоваться и описываться так же, как представленные ранее касательно модуля коннектора 4190 и модуля коннектора 4200 и ультразвукового хирургического инструмента 4100. Например, модуль коннектора 4300 может соединяться с платой, связанной с пользовательским интерфейсом, которая может быть подобна гибкой схеме 4202. Модуль коннектора 4300 также может соединяться с дистальной частью 4304 ультразвуковой рукоятки (см. ФИГ. 93-94). Модуль коннектора 4300 имеет корпус 4306 и вращающийся соединительный элемент 4308 и может располагаться внутри рукояточного блока (например, рукояточного блока 4102, показанного на ФИГ. 93-95). Как описано выше, ультразвуковой рукоятка может соединяться механически и акустически с волноводом, который может быть сконструирован таким образом, чтобы функционально соединяться с механизмом концевого зажима. Ультразвуковой рукоятка также может вращаться относительно корпуса модуля коннектора 4306, который может обеспечивать вращательное электрическое соединение между ультразвуковым рукояткой и пользовательским интерфейсом. Модуль коннектора 4300 может включать в себя вращающийся центр 4340, обычно выходящий проксимально из корпуса 4306 по продольной оси. Вращающийся соединительный элемент 4308 может крепиться с возможностью свободного вращения на вращающемся центре 4340 для вращения относительно корпуса 4306. Вращающийся центр 4340 имеет один или более фиксирующих конструктивных элементов 4360a, 4360b, служащих для фиксации и ограничения продольного отклонения от оси вращающегося соединительного элемента 4308.
Механизм переключателя 4300 имеет пару внешних контактов для соединения с рукояткой 4328, 4328b, имеющих прижимные контакты, служащие для электрического соединения с одним или более электрическими контактами, расположенными на первой дистальной поверхности 4332a, 4332b ультразвуковой рукоятки. Внешние контакты для соединения с рукояткой 4328a, 4323b, расходятся от натяжных элементов или подпружиненных рычагов 4348a, 4328b (см. ФИГ.103), предназначенных для отгибания или натяжения внешних контактов для соединения с рукояткой 4328a, 4348b наружу от продольной оси и/или по направлению к первой дистальной поверхности 4332a, 4328b. Внешние контакты для соединения с рукояткой 4328a, 4328b выполнены таким образом, чтобы проходить через паз 4346a, 4346b во вращающемся соединительном элементе 4310 и имеют прижимные контакты для электрического соединения с одним или более электрических контактов, расположенных на первой дистальной поверхности 4332a, 4332b дистальной части 4304 ультразвуковой рукоятки.
В одном из вариантов, механизм переключателя 4300 имеет пару внутренних контактов для соединения с рукояткой 4330a, 4330b, имеющих прижимные контакты, служащие для электрического соединения с одним или более электрическими контактами, расположенными на второй дистальной поверхности 4334a, 4334b ультразвуковой рукоятки. Внутренние контакты для соединения с рукояткой 4330a, 4330b расходятся от натяжных элементов или подпружиненных рычагов 4358a, 4358b (см. ФИГ.103), предназначенных для отгибания или натяжения внутренних контактов для соединения с рукояткой 4330a, 4330b наружу от продольной оси и/или по направлению ко второй дистальной поверхности 4334a 4334b. Внешние контакты для соединения с рукояткой 4330a, 4330b выполнены таким образом, чтобы проходить через паз 4354a, 4354b во вращающемся соединительном элементе 4310 и имеют прижимные контакты для электрического соединения с одним или более электрических контактов, расположенных на второй дистальной поверхности 4334a, 4334b дистальной части 4304 ультразвуковой рукоятки.
Как показано наиболее четко на ФИГ. 101-102, модуль коннектора 4300 имеет один или несколько зацепляющих элементов 4399a, 4399b, 4399c, 4399d, служащих для зацепления ультразвуковой рукоятки. Зацепляющие элементы 4399a, 4399b, 4399c, 4399d могут иметь один или несколько выступов, зажимов или механизмы захвата, расположенные вокруг вращающегося соединительного элемента 4310. Зацепляющие элементы 4399a, 4399b, 4399c, 4399d служат для зацепления поверхности ультразвуковой рукоятки. Зацепляющие элементы могут иметь один или несколько гнущихся, пластичных, гибких полимерных материалов, расположенных на вращающемся соединительном элементе. В одном из вариантов, зацепляющие элементы 4399a, 4399b, 4399c, 4399d имеют такие размеры, чтобы захватывать по диаметру ультразвуковой инструмент. Например, зацепляющие элементы 4399a, 4399b, 4399c, 4399d могут иметь диаметр, меньший, чем размеры ультразвуковой рукоятки, для создания соединения с помощью трения. В различных вариантах, рукоятка может иметь дистальную часть 4304 с выступом или желобом для сцепления с частью зацепляющих элементов 4399a, 4399b, 4399c, 4399d. В одном из вариантов, зацепляющие элементы 4399a, 4399b, 4399c, 4399d могут быть выполнены таким образом, чтобы пригибаться внутрь к продольной оси для зацепления с рукояткой, вызывая напряжение по направлению от продольной оси для соединения с рукояткой с возможностью свободного вращения, когда рукоятка зацеплен.
На ФИГ.100 изображен наружный вид вращающегося соединительного элемента 4310 с размещенным в нем внутренним и внешним кольцевыми проводниками 4312, 4314 и соответствующими внутренним и внешним соединительными элементами 4320, 4322a, 4322b. Внутренний и внешний соединительные элементы 4320, 4322a, 4322b могут быть выполнены с возможностью вращения относительно внешнего кольцевого проводника 4312 и внутреннего кольцевого проводника 4314. Внешний кольцевой проводник 4312 и внутренний кольцевой проводник 4314 имеют проводящие контакты 4316, 4318, служащие для электрического соединения с пользовательским интерфейсом через пазы в корпусе 4306, которые могут быть подобными пазам 4342, 4344. Каждый из соединительных элементов 4320, 4322a, 4322b имеет пару проводящих контактов 4324a, 4324b, 4326a, 4326b, расположенных так, чтобы электрически соединяться с соответствующим кольцевым проводником 4312, 4314, когда соединительный элемент 4320, 4322a, 4322b находится в первой позиции и второй позиции, и пару контактов для соединения с рукояткой 4328a, 4328b, 4330a, 4330b, служащих для электрического соединения с дистальной поверхностью 4332a, 4332b, 4334a, 4334b дистальной части 4304 ультразвуковой рукоятки. Например, контакты кольцевого проводника 4324a, 4324b, 4326a, 4326b могут быть выполнены с возможностью вращения вокруг продольной оси между первой и второй позициями, так что контакты кольцевого проводника 4324a, 4324b, 4326a, 4326b поддерживают электрический контакт с соответствующим кольцевым проводником 4312, 4314 при вращении.
Внешний соединительный элемент 4312 имеет пару контактов кольцевого проводника 4324a, 4324b, соединенных с подпружиненными рычагами 4336a, 4336b, служащих для пригибания контактов 4324a, 4324b по направлению к внутренней поверхности внешнего кольца 4312. Пара внешних контактов для соединения с рукояткой 4328a, 4328b электрически соединена с парой контактов внешнего кольца 4324a, 4324b для обеспечения электрически проводящего тракта от дистальной части 4304 рукоятки к внешнему кольцу. Внутренний соединительный элемент 4314 имеет пару контактов кольцевого проводника 4326a, 4326b, соединенных с парой контактов для соединения с рукояткой 4320a, 4320b и с подпружиненными рычагами 4338a, 4338b, служащих для пригибания контактов кольцевого проводника 4326a, 4326b к внешней поверхности внутреннего кольца 4314. Внутренний соединительный элемент 4322a, 4322b имеет первый участок 4322a и второй участок 4322b.
Вращающийся соединительный элемент 4310 образует центральный канал 4394, ограниченный проксимальной поверхностью вращения 4396a и дистальным пазом 4396b. Вращающийся соединительный элемент 4310 имеет множество пазов, размеры которых позволяют вставлять в них кольцевые проводники 4312, 4314 и соответствующие соединительные элементы 4320, 4322a, 4322b. Конфигурация пазов, показанная на ФИГ. 103, идентична конфигурации пазов, показанной на ФИГ. 100, и из соображений краткости изложения не описана здесь подробно. Например, вращающийся соединительный элемент имеет паз 4370, в который вставляется внешний кольцевой проводник 4312, и паз 4396b, в который вставляется внутренний кольцевой проводник 4314. Вращающийся соединительный элемент имеет паз 4380, размеры которого позволяют вставлять в него внешний соединительный элемент 4312. Вращающийся соединительный элемент также имеет паз 4388a, в который вставляется первый участок внутреннего соединительного элемента 4322a, и паз 4388b, в который вставляется второй участок внутреннего соединительного элемента 4322b. Пазы 4346a, 4346b имеют круговое окно, выходящее наружу от продольной оси. Пазы 4392a, 4392b имеют дугообразные желобки, смотрящие наружу, в которые вставляются внутренние контакты для соединения с рукояткой 4330a, 4320b.
На ФИГ. 104 и 105 изображен один из вариантов рукояточного блока 5000, в котором используется уникальный инновационный механизм переключателя, обозначенный номером 5020. В различных вариантах, рукояточный блок 5000 может походить по конструкции и манере использования на другие рукояточные блоки, описанные в настоящем документе. Соответственно, те характеристики, которые являются общими для устройства этого и других рукояточных механизмов и которые были описаны в настоящем документе ранее, не будут описаны подробно за исключением тех характеристик, которые необходимы для понимания конструкции и принципа работы рукояточного блока 5000.
По крайней мере в одном варианте рукояточный блок 5000 может иметь две половины корпуса рукоятки, при совмещении которых образуется корпус рукоятки 5002. Например, левая половина корпуса рукоятки 5004 показана на ФИГ. 104, а правая половина корпуса рукоятки 5006 показана на ФИГ. 105. Половины корпуса рукоятки 5004, 5006 могут быть изготовлены из пластика или иного полимерного материала и совмещаются при помощи таких крепежных деталей, как винты, болты, защелки, клеящие субстанции и т.д. Половины корпуса рукоятки 5004, 5006 вместе образуют корпус рукоятки 5002, которая имеет неподвижную рукояточную часть, которая может иметь ручку в форме рукоятки пистолета 5008, которую легко брать и которой легко манипулировать одной рукой. Как видно на ФИГ. 104, левая половина корпуса рукоятки 5004 может иметь такую форму, при которой имеется выемка для большого пальца, обозначенная номером 5010. Специалисты в данной области техники, поймут, что, когда врач берет рукоятку пистолетного типа 5008 в руку, например, большой палец естественным образом располагается в выемке для большого пальца 5010. По крайней мере в одном варианте правая половина корпуса рукоятки 5006 также может быть выполнена с такой же выемкой для большого пальца (отсутствует на иллюстрации), так, что если врач берет рукоятку 5000 левой рукой, большой палец естественным образом располагается в этой зоне.
Как было сказано ранее, рукояточный блок 5000 включает в себя механизм переключателя 5020, который может иметь первое устройство переключения 5030 и второе устройство переключения 5060. По меньшей мере в одном варианте первый переключатель 5030 имеет первый кнопочный механизм 5032, который может поворачиваться относительно «передней части» 5003 корпуса рукоятки 5002. Первый кнопочный механизм 5032 может быть изготовлен, например, из полимера или иного подходящего материала и состоит из первой кнопки 5034 и второй кнопки 5036, взаимосвязанных с помощью шейки вала 5038. Шейка вала 5038 служит для поворотной поддержки первого кнопочного механизма 5032 на первом поворотном валике 5040, который проходит между первой и второй половинами корпуса 5004, 5006. Первый поворотный валик 5040 может быть заформован в одной из половин корпуса 5004, 5006 и вставляться в соответствующее гнездо (отсутствует на иллюстрации) во второй половине корпуса 5004, 5006. Первый поворотный валик 5040 может соединяться с половинами корпуса рукоятки 5004, 5006 и другими способами. Первый поворотный валик 5040 имеет ось первого переключателя FS-FS, вокруг которой может поворачиваться первый кнопочный механизм 5032. См. ФИГ. 107. По крайней мере в одном варианте первая и вторая кнопки 5034, 5036 могут иметь луковицеобразную форму, как показано на ФИГ. 106 и 107. В дополнение к этому, чтобы еще больше улучшить возможность различения первой кнопки 5034 и второй кнопки 5036 не глядя на кнопки 5034, 5036, одна из кнопок может иметь отличительный элемент или элементы. Например, как показано на ФИГ. 106 и 107, первая кнопка 5034 имеет множество шипов 5042 или других образований по всей окружности.
Как видно на ФИГ. 105, рамка переключения 5050 закреплена внутри рукояточного блока 5002 таким образом, чтобы располагаться проксимально к первому кнопочному механизму 5032 и части рукояточного блока 5002, которая прилегает к выемке для большого пальца 5010 (ФИГ. 104). В одном из вариантов, рамка переключения 5050 неподвижна относительно первого кнопочного механизма 5032 и может жестко крепиться на штыри или иные элементы жесткости, сформованные или иным способом изготовленные в половинах корпуса рукоятки 5004, 5006. Рамка переключения 5050 может поддерживать плату 5052, например, печатную плату, гибкую плату, жестко-гибкую плату или иную подходящую конфигурацию, которая включает в себя первую контактную площадку 5054, соответствующую первой кнопке 5034 и вторую контактную площадку 5056, соответствующую второй кнопке 5036. Специалисты в этой области поймут, что поворачивая первый кнопочный механизм 5032 вокруг первой оси переключения FS-FS, врач может активировать первую контактную площадку 5054 путем поворота первой кнопки 5034 в активирующий контакт с первой контактной площадкой 5054. В настоящем документе термин «активирующий контакт» используется в значении достаточного физического контакта между кнопкой и первой контактной площадкой, необходимого для инициирования действия контактной площадки (или иного контактного устройства). «Активирующий контакт» также может пониматься как достаточная физическая близость кнопки к контактной площадке (или иному контактному устройству), достаточная для инициирования действия контактной площадки, но при отсутствии физического касания контактной площадки какой-либо частью кнопки. Врач может активировать вторую контактную площадку 5056 путем поворота второй кнопки 5036 в активирующий контакт со второй контактной площадкой 5056. Это уникальное инновационное устройство первого переключателя может быть легко активировано врачом с помощью указательного пальца, когда врач берется за часть рукоятки пистолетного типа 5008 рукояточного блока 5000. Так, каждая кнопка механизма переключателя может легко быть приведена в действие одной рукой, держащей рукояточный блок. Как и в различных вариантах, описанных ранее, первое устройство переключателя 5030 может использоваться для модулирования настроек мощности ультразвуковой рукоятки и/или для активации различных алгоритмов, описанных в настоящем документе.
В некоторых вариантах, первое устройство переключателя 5030 соединено с генератором, таким как любой из генераторов 30, 500, 1002. Например, соответствующие контактные площадки 5054, 5056 могут иметь электрическую связь с генератором посредством модуля коннектора 5057, который в некоторых вариантах, идентичен модулю коннектора 4200, описанному в настоящем документе ранее. Модуль коннектора 5057 соединен с внутренним или внешним генератором. Сигналы, свидетельствующие об активации соответствующих контактных площадок 5054, 5056, могут привести к изменению генератором работы инструмента 5000. Например, когда врач выбирает первую кнопку 5034, генератор может увеличить уровень мощности, подаваемой на концевой зажим. Когда врач выбирает вторую кнопку 5036, генератор может снизить уровень мощности, подаваемой на концевой зажим. В различных вариантах, исполнения генератор может иметь настройки для установки мощности от минимального уровня (например, МИН) до максимального (например, МАКС). Например, некоторые варианты генераторов GEN11 производства компании Ethicon Endo-Surgery, Inc. (Цинциннати, штат Огайо), имеют пять уровней мощности. Кнопки могут использоваться для переключения уровней мощности генератора. Также в некоторых вариантах, одна или обе кнопки 5034, 5036 могут быть связаны с алгоритмом, таким как алгоритмы, описанные в настоящем документе. Например, когда пользователь выбирает одну из кнопок 5034, генератор может выполнить алгоритм, такой как, например, один или несколько из алгоритмов 3021, 3021´, 3021´´, 3120, 3170, любой из алгоритмов, описанных касательно ФИГ. 15A-15C, 20-22, 57-60, и т.д.
В различных вариантах, механизм переключателя 5020 также имеет второе устройство переключения 5060. Что касается ФИГ. 107-109, второе устройство переключения 5060 может иметь правую кнопку переключения 5062 и левую кнопку переключения 5066, каждая из которых поворотно закреплена на рамке переключения 5050. Например, правая кнопка переключения 5062 поворотно закреплена или заштифтована на рамке переключения 5050 для выборочного поворотного движения вокруг правой оси переключения RS-RS, которая поперечна первой оси переключения FS-FS. См. ФИГ. 108 и 109. Точно так же левая кнопка переключения 5066 поворотно крепится к рамке переключения 5050 для выборочного поворотного движения вокруг левой оси переключения LS-LS. В альтернативных устройствах правая и левая кнопки переключения 5062, 5066 могут поворотно крепиться к половинам корпуса рукоятки 5004, 5006.
По крайней мере в одном варианте правая и левая кнопки 5062 и 5066 могут иметь форму бочонка для облегчения приведения в действие большим и/или другим пальцем. Легкость приведения в действие повышается, учитывая тот факт, что правая и левая кнопки 5062, 5066 расположены в зонах выемки для большого пальца, имеющихся в обеих половинах корпуса рукоятки. Например, если врач держит рукоятку пистолетного типа 5008 в правой руке, врач может активировать правую кнопку переключения 5062 путем поворотного движения большого пальца правой руки вниз по правой кнопке переключения 5062 при контакте с кнопкой. Точно так же, если врач держит рукоятку пистолетного типа 5008 в левой руке, он может активировать левую кнопку переключения 5066 путем поворотного движения большого пальца левой руки вниз по левой кнопке переключения 5066 при контакте с кнопкой. Такие уникальные инновационные устройства переключения позволяют активировать левую и правую кнопки переключения 5062, 5066, избегая случайной активации от приложения к кнопкам переключения силы, направленной прямо на кнопки.
Как видно из ФИГ. 108, правая кнопка переключения 5062 имеет правый движок 5064, выдающийся из нее, для активации правой контактной площадки 5058, которая составляет часть платы 5052. Точно так же левая кнопка переключения 5062 имеет левый движок 5068, выдающийся из нее, для активации левой контактной площадки 5059, которая составляет часть платы 5052. Так, специалисты в данной области техники поймут, что передвигая или поворачивая правую кнопку переключения 5062 вокруг правой оси переключения RS-RS, врач может активировать правую контактную площадку 5058, а передвигая левую кнопку переключения 5066, врач может активировать левую контактную площадку 5059. Левая и правая контактные площадки 5058, 5059 могут иметь электрическую связь с генератором, например, при помощи модуля коннектора 5057. Генератор может быть запрограммирован на изменение работы инструмента 5000 любым подходящим образом после активации одной из кнопок переключения 5062, 5066. в некоторых вариантах, одна или обе кнопки переключения 5062, 5066 могут быть связаны с алгоритмом, таким как алгоритмы, описанные в настоящем документе. Например, когда пользователь выбирает одну из кнопок 5034, генератор может выполнять алгоритм, такой как, например, один или несколько из алгоритмов 3021, 3021´, 3021´´, 3120, 3170, любой из алгоритмов, о которых говорится в описании к ФИГ. 15A-15C, 20-22, 57-60, и т.д. в некоторых вариантах, генератор настроен таким образом, чтобы выполнять один и тот же алгоритм после активации одной из кнопок переключения 5062, 5066, например, для удобства врачей с ведущей правой или левой рукой.
На ФИГ. 109A изображен механизм переключателя 5020’, который может иметь первое устройство переключения 5030, а также второе устройство переключения 5060’. По крайней мере в одном варианте второе устройство переключения 5060’ имеет левую кнопку переключения 5066’, имеющую левый поворотный движок 5067, выступающий из нее. Левая кнопка переключения 5066’ может поворотно крепиться на шарнирное крепление 5007 или другие элементы, отформованные или выполненные иным способом в левой половине корпуса рукоятки 5004. Левая кнопка переключения 5066’ может иметь форму или конфигурацию бочонка и поворачиваться по выбору пользователя вокруг левой оси переключения LS-LS, поперечной первой оси переключения FS-FS. Врач может по своему выбору поворачивать левую кнопку переключения 5066’ для приведения приводного механизма 5069 левого движка переключения 5067 в активирующий контакт с соответствующей контактной площадкой 5059, закрепленной внутри рукояточного блока. В устройстве, изображенном на иллюстрации, второе устройство переключения включает в себя только левую кнопку переключения 5066’, как описано ранее. В альтернативных вариантах, второе устройство переключения может иметь только правую кнопку переключения, помещенную на правой стороне корпуса рукоятки способом, проиллюстрированном на ФИГ. 109A. Другие варианты второго устройства переключения могут иметь и правую, и левую кнопки переключения, установленные способом, проиллюстрированном на ФИГ. 109A.
На ФИГ. 110 и 111 изображен еще один вариант рукояточного блока 5100, подобный рукояточному блоку 5000, описанному ранее, за исключением того, что правая и левая кнопки переключения 5162, 5166 не поворачиваются, а вместо этого закрепляются в соответствующих половинах корпуса рукоятки 5106, 5104 таким образом, что могут нажиматься по направлению внутрь для контакта с соответствующими правым и левым контактами (отсутствуют на иллюстрации). Как и в случае с блоком рукоятки 5000, описанным ранее, правая и левая кнопки переключения 5162, 5166 расположены в зонах выемки для большого пальца 5012, 5010, соответственно, способом, описанным ранее, в целях облегчения работы врача, который берется рукой за рукоятку типа пистолета 5108.
На ФИГ. 112 изображена часть левой половины корпуса рукоятки 5204 другого варианта рукояточного блока 5200, в котором левая боковая кнопка 5266 может поворотно соединяться с рамкой переключения 5250, как показано, и соединяться с зажимом переключения 5267, который подогнан для поворота в активирующий контакт с соответствующей левой контактной площадкой 5059. Правый кнопочный механизм (отсутствует на иллюстрации) рукояточного блока 5200 может иметь подобную конфигурацию. В альтернативных устройствах правая и левая кнопки могут поворотно соединяться с соответствующими половинами корпуса рукоятки.
На ФИГ. 113 и 114 изображен еще один вариант второго устройства переключения 5360, которое может использоваться, например, в рукояточном блоке 5000, описанном ранее, вместо второго устройства переключения 5060. Как видно на ФИГ. 113 и 114, второе устройство переключения 5360 может иметь левую кнопку переключения 5366, которая имеет левый движок переключения 5370, выступающий сбоку над и поверх всей рамки переключения 5350, закрепленной внутри рукояточного блока, как было описано ранее. Левый движок переключения 5370 поворотно закреплен на правой части или элементу 5352 рамки переключения 5350, примыкающей к правой половине корпуса рукоятке (отсутствует на иллюстрации) рукояточного блока. Левый движок переключателя 5370 может быть прикреплен штифтом, например, к правой части 5352 рамки переключения 5350 и образовывать правую ось переключения RS-RS, вокруг которой может поворачиваться левый движок переключателя. См. ФИГ. 113. Левый пусковой штифт или бобышка 5372 идет вниз от левого движка переключения 5370 так, что когда врач поворачивает левую кнопку переключения 5366 способом, описанным ранее, левый пусковой штифт 5372 приводится в активирующий контакт с соответствующей контактной площадкой 5359, прикрепленной к рамке переключения 5350.
Снова касательно ФИГ. 113 и 114: второе устройство переключения 5360 может также иметь правую кнопку переключения 5362, у которой имеется правый движок переключения 5380, выступающий сбоку над и поверх левого движка переключения 5370, чтобы поворотно соединяться с левой частью или элементом 5354 рамки переключения 5350, примыкающей к левой половине корпуса рукоятки (отсутствует на иллюстрации) рукояточного блока. Правый движок переключателя 5380 может быть прикреплен штифтом, например, к левой части 5354 рамки переключения 5350 и образовывать левую ось переключения LS-LS, вокруг которой может поворачиваться правый движок переключателя 5380. См. ФИГ. 113. Правый пусковой штифт или бобышка 5382 идет вниз от правого движка переключателя 5380 через соответствующее отверстие 5374 в левом движке переключателя 5370 так, что когда врач поворачивает правую кнопку переключения 5362 способом, описанным ранее, правый пусковой штифт 5382 приводится в активирующий контакт с соответствующей контактной площадкой 5358, прикрепленной к рамке переключения 5350. Правая и левая оси переключения могут быть фактически параллельными друг другу, но отстоять друг от друга. При использовании в рукояточном блоке, имеющем первое устройство переключения 5030, правая и левая оси переключения могут быть по существу поперечными первой оси переключения FS-FS первого устройства переключения. Специалисты в данной области поймут, что такое устройство переключения облегчает работу с длинными поворотными рычагами, которые облегчают движение кнопок, направленное прямо вниз.
На ФИГ. 115 изображен еще один вариант второго устройства переключения 5460, которое может использоваться, например, в рукояточном блоке 5000, описанном ранее, вместо второго устройства переключения 5060. Как видно на этой фигуре, левая и правая кнопки переключения 5566, 5562 выполнены таким образом, чтобы поворотно соединяться с рамкой переключения 5450, находящейся по центру между кнопками переключения 5566, 5562 и образующей одну ось переключения SA. При использовании в рукояточном блоке, имеющем первое устройство переключения 5030, ось переключения SA может быть по существу поперечна первой оси переключения FS-FS первого устройства переключения. Рамка переключения 5450 может жестко крепиться в корпусе рукояточного блока, находясь между соответствующими правой и левой половинами корпуса рукоятки (нет на иллюстрации).
По меньшей мере в одном варианте правая кнопка переключения 5462 имеет правый соединительный элемент 5480, выходящий из нее, который поворотно крепится к рамке переключения 5450. Таким же образом левая кнопка переключения имеет левый соединительный элемент 5470, выходящий из нее и поворотно соединяющийся с рамкой переключения 5460. Правый и левый соединительные элементы 5480, 5470 могут поворотно крепиться к рамке переключения 5450 при помощи обычного стержня (нет на иллюстрации) и образовывать ось переключения SA, вокруг которой могут поворачиваться кнопки 5462 и 5466. Правый пусковой штифт или бобышка 5482 выходит внутрь от правого соединительного элемента так, что когда врач поворачивает правую кнопку переключения 5462 способом, описанным ранее, правый пусковой штифт 5482 приводится в активирующий контакт с соответствующей контактной площадкой 5458, прикрепленной к рамке переключения 5450. Таким же образом левый пусковой штифт или бобышка 5472 выходит внутрь от левого соединительного элемента 5470 так, что когда врач поворачивает левую кнопку переключения 5466 способом, описанным ранее, левый пусковой штифт 5472 приводится в активирующий контакт с соответствующей контактной площадкой 5459 на рамке переключения 5450. Каждый из движков переключателя 5470 и 5480 может быть отогнут в положение, при котором отсутствует активация, с помощью соответствующих пружин или сгибающих конструкций (нет на иллюстрации), расположенных, например, между соединительным элементом переключателя 5470, 5480 и рамкой 5450.
На ФИГ. 116 изображен еще один вариант второго устройства переключения 5560, которое может использоваться, например, в рукояточном блоке 5000, описанном ранее, вместо второго устройства переключения 5060. Как видно на этой фигуре, второе устройство переключения 5560 использует один второй привод переключателя 5561, проходящий между правой частью корпуса рукоятки 5006 и левой частью корпуса рукоятки 5004 так, что его правый край образует правую кнопку переключения 5562, а левый край - левую кнопку переключения 5566. Второй привод переключателя 5561 свободно проходит через соответствующие отверстия 5005 и 5007 в левой и правой половинах корпуса рукоятки 5004, 5006 таким образом, что второй привод 5561 может по выбору аксиально перемещаться вдоль оси переключения SA-SA. При использовании в рукояточном блоке 5000, имеющем первое устройство переключения 5030, ось переключения SA-SA может быть фактически параллельна первой оси переключения FS-FS первого устройства переключения.
Правый элемент смещения 5590 и левый элемент смещения 5592 могут располагаться внутри второго привода переключателя 5561 и служить для соединения с центральной частью рамки переключения 5550 для того, чтобы второй привод переключателя 5561 находился в центре в положении, при котором не происходит активация, как показано на ФИГ. 116. Механизм переключающих контактов 5557 может располагаться по центру между правым элементом привода или выступом 5563, прикрепленном или выполненном на втором приводе 5561, и левым элементом привода или выступом 5565, выполненном на втором приводе 5561. Механизм переключающих контактов 5557 может, например, иметь правую часть 5557R, которая соответствует правому приводу 5563, и левую часть 5557L, которая соответствует левому элементу привода 5565. Так, при нажатии правой кнопки переключения 5562 второй привод переключения 5561 сдвинется влево в бок в направлении «LD» и приведет правый привод 5563 в активирующий контакт с правой частью 5557R механизма переключающих контактов 5557. Таким же образом при нажатии левой кнопки переключения 5566 второй привод переключения 5561 сдвинется вправо в бок в направлении «RD» и приведет левый привод 5565 в активирующий контакт с левой частью 5557L механизма переключающих контактов 5557.
На ФИГ. 117-120 в схематичной форме изображен механизм переключения 5620, который может использоваться с различными ультразвуковыми рукояточными блоками, описанными в настоящем документе. По меньшей мере в одном варианте механизм переключателя 5620 имеет один кнопочный механизм 5632, который может располагаться там, например, где находится первый кнопочный механизм 5032 в рукояточном блоке 5000, как было подробно описано ранее. Например, кнопочный механизм 5632 может иметь рычаг 5633 держателя кнопки, который имеет кнопку привода 5634, расположенную на нем, которая может приводиться в действие указательным пальцем, когда врач берет в руку ручку пистолетного типа соответствующего рукояточного блока.
По меньшей мере в одном варианте рычаг 5633 держателя кнопки может иметь пару поворотных валиков 5637, 5639, которые подвижно вставляются в продолговатый паз 5671 в корпусе переключателя 5670, который закреплен в корпусе рукоятки. Поворотные валики кнопок 5637, 5639 облегчают движение по оси рычага 5633 держателя кнопки (ФИГ. 118), а также вращательное или поворотное движение рычага 5633 держателя кнопки относительно корпуса переключателя 5670 (ФИГ. 119 и 120). Как видно на ФИГ. 117-120, продолговатый паз 5671 примыкает к тройному отверстию привода 5673, который имеет правый конец 5675, соответствующий правому переключателю 5658, левый конец 5677, соответствующий левому переключателю 5659, и центральный конец 5679, соответствующий центральному переключателю 5654. Как видно на ФИГ. 117, рычаг 5633 держателя кнопки может иметь левую часть привода переключателя 5690, центральную часть привода переключателя 5692 и правую часть привода переключателя 5694. В дополнение к этому, между рычагом 5633 держателя кнопки и корпусом рукоятки 5002 могут располагаться правая пружина 5680 и левая пружина 5682 для удержания кнопочного держателя в центральном нейтральном положении (ФИГ. 117), когда он не приводится в действие.
Работа механизма переключателя 5620 может быть понятна из описания к ФИГ. 118-120. ФИГ. 118 иллюстрирует приведение в действие центрального переключателя 5654 путем нажатия кнопки привода 5634 внутрь, как показано стрелкой «D». Когда кнопка привода 5634 нажата, рычаг 5633 держателя кнопки движется по оси вдоль или относительно продолговатого паза 5671 в корпусе переключения 5670 для приведения центральной части привода переключателя 5692 в активирующий контакт с центральным переключателем 5654. ФИГ. 119 иллюстрирует приведение в действие правого переключателя 5658 путем поворота кнопки привода 5634 в направлении, указанном стрелкой «МИН», которое приводит правую часть привода переключения 5694 в активирующий контакт с правым переключателем 5658. ФИГ. 120 иллюстрирует приведение в действие левого переключателя 5659 путем поворота кнопки привода 5634 в направлении, указанном стрелкой «МАКС», которое приводит левую часть привода переключения 5690 в активирующий контакт с левым переключателем 5659. Соответствующие переключатели 5654, 5658, 5659 могут иметь электрическую связь с генератором, например, при помощи модуля коннектора 5057, как описано в настоящем документе ранее. Генератор может быть запрограммирован на выполнение любого подходящего действия в отношении инструмента 500 после приведения в действие одного из переключателей 5654, 5658, 5659. Например, в некоторых вариантах, переключатели 5658 и 5659 выполняют функцию, подобную функции кнопок 5034, 5036, описанной ранее. Например, приведение в действие одной из кнопок 5658, 5659 может привести к тому, что генератор увеличит мощность, подаваемую на концевой зажим, а приведение в действие другой кнопки 5658, 5659 может привести к тому, что генератор уменьшит мощность, подаваемую на концевой зажим. В дополнение к этому, после манипуляций с одной или несколькими из кнопок 5654, 5658, 5659 генератор может выполнить алгоритм, такой как, например, один или несколько из алгоритмов 3021, 3021´, 3021´´, 3120, 3170, любой из алгоритмов, о которых говорится в описании к ФИГ. 15A-15C, 20-22, 57-60, и т.д.
Разные врачи практикуют разные приемы в использовании ультразвуковых хирургических инструментов и систем, описанных в настоящем документе. Например, некоторые врачи обычно активируют ультразвуковой хирургический инструмент, не смыкая полностью зажимной рычаг с лезвием. Несмотря на то, что многие врачи считают, что этот прием улучшает работу системы, на практике это часто не так, и существует возможность повреждения ткани, например, из-за более длительного времени рассечения, а иногда процесс рассечения и/или коагуляции затрудняется.
В различных вариантах, эта и другие проблемы могут решаться путем такой конструкции хирургического инструмента, при котором имеется переключатель закрытия, полностью закрывающий зажимной рычаг. Генератор может быть настроен таким образом, чтобы не активировать хирургический инструмент до тех пор или если переключатель закрытия не находится в положении, свидетельствующим о полном закрытии зажимного рычага. Касательно ФИГ. 95 и 105: некоторые варианты переключателя закрытия расположены в рукоятке 4122 (ФИГ. 95). Например, на ФИГ. 95 и 105 иллюстрируется необязательный переключатель закрытия 5900, расположенный на внутренней, проксимальной части рукоятки 4122 (ФИГ. 95) и одной или более половин корпуса ручки 5004, 5006 (ФИГ. 105).
Переключатель 5900 может быть расположен так, чтобы спусковой механизм 4124 контактировал с переключателем 5900 в своем самом проксимальном положении. Например, переключатель 5900 может располагаться на конце хода спускового механизма 4124 (например, в направлении, указанном стрелкой 4121a на ФИГ. 93). Таким образом, спусковой механизм 4124 может контактировать с переключателем 5900, когда спусковой механизм 4124 притягивается близко, чтобы произошло смыкание зажимного рычага с лезвием. В различных вариантах, переключатель 5900 может располагаться в любом месте, где он будет приводиться в действие при закрытии концевого зажима (например, зажимной рычаг повернут к лезвию). Например, переключатель 5900 может располагаться удаленно от вилки 4174 и/или трубчатого элемента привода с возвратно-поступательным движением 4138, чтобы приходить в действие, когда один или второй из этих компонентов удаленно передает движение закрытия концевого зажима. Переключатель 5900 может иметь электрическую связь с генератором, таким как 30, 50, 1002, например, через модуль коннектора 5057 и/или 4200 и рукоятка, как описано в настоящем документе. В различных вариантах, генератор запрограммирован на невыполнение активации хирургического инструмента, если не активирован переключатель 5900. Например, если генератор получает запрос на активацию от одного или нескольких переключателей, описанных в настоящем документе, он может отреагировать на запрос об активации только если переключатель 5900 активирован, что свидетельствует о том, что зажимной рычаг закрыт.
На ФИГ. 121 изображена функциональная схема системы 6000, изображающая генератор 6002, соединенный с медицинским инструментом 6004 и схемой 6006. Генератор 6002 может быть соединен непосредственно с инструментом 6004 или может быть соединен с ним через кабель 6008. Схема 6006 может соединяться с генератором 6002 для получения кодированного кадра передачи двоичных разрядов от платы преобразования сигнала 2002 (например, от терминалов HS и SR генератора 1002 (ФИГ. 19) с помощью пары проводящих элементов HS/SR). В различных вариантах, генератор 6002 функционально эквивалентен генератору 2002 и уже был описан в пояснениях к ФИГ. 19. Поэтому, в целях краткости и ясности изложения, описание генератора 2002, 6002 здесь не приводится повторно. Тем не менее, следует понимать, что в системе 6000 могут использоваться другие генераторы. Также, хотя некоторые аспекты описанных протоколов последовательной передачи данных могут быть описаны в настоящем документе далее в связи с описанием различных схем и систем, следует понимать, что данное описание должно охватывать все способы генерирования сигнала при помощи кадра передачи в соответствии с диаграммами расчета времени протокола, разъясняемыми на ФИГ. 123-128.
Кодированный кадр передачи, подробно описанный далее в настоящем документе в пояснениях к ФИГ. 123-127, представляет собой повторяющийся, двусторонний сигнал связи, где кодированный кадр в повторяющемся режиме передается генератором 6002. Кадр состоит из последовательности двоичных разрядов, которые одновременно кодируют входную/выходную (I/O) информацию об одном двоичном разряде путем модулирования амплитуды двоичного разряда и ширины импульса двоичного разряда. Входные двоичные разряды кодируются таким образом, что информация, касающаяся состояния схемы 6006, передается генератору 6002 одновременно с выходными двоичными разрядами, кодируемыми с информацией от генератора 6002 о том, как задавать выходные данные схемы 6006 и, соответственно, выходные состояния инструмента 6004. В различных вариантах, описанных в настоящем документе, генератор 6002 модулирует или устанавливает ширину импульсов (время) для передачи информации от генератора 6002 к схеме 6006 о том, как задать выходные данные схемы 6006. В различных вариантах, описанных в настоящем документе, схема 6006 модулирует или устанавливает высоту (амплитуду) импульсов для передачи информации о состоянии схемы генератору 6002. Коме того, в одном из вариантов, схема 6006 может пассивно быть запитана от двухстороннего коммуникационного сигнала без другого источника питания. В других вариантах, схема 6006 может быть запитана от других источников питания. В других вариантах, схема 6006 может пассивно быть запитана от двухстороннего коммуникационного сигнала и от других источников питания.
Инструмент 6004 имеет схему 6006, которая может включать в себя по меньшей мере один переключатель, который, вместе с генератором 6002, поддерживает активацию входных данных переключения и памяти инструмента
EEPROM. Схема 6006 может размещаться внутри инструмента (как показано выше в пояснениях к линиям передачи данных 2006, 2007. в некоторых вариантах, исполнения схема 6006 может располагаться в ручном блоке, таком как рукоятка 1014 и может передавать генератору данные касательно рукоятки, таких как, например, заданное значение тока, коэффициент усиления, и т.д. Инструмент 6004 предоставляет различные возможности входа/выхода (I/O) и может использовать множество входов переключателя, аналоговых входов, а также дискретные выходы, аналоговые выходы. Чтобы реализовать функционал множества входов и выходов переключателя, схема 6006 обменивается данными с генератором 6002 с использованием новейшего протокола последовательной связи, схемами расчета времени, которые проиллюстрированы на ФИГ. 122-127. Схема 6006 замыкает электрически проводящие элементы HS-SR, электрически соединяющие генератор 6002 и инструмент 6004. Замыкание линий HS-SR позволяет схеме 6006 устанавливать стартовый импульс и импульс останова кадра передачи, которые также могут называться стартовыми/стоповыми двоичными разрядами. Помимо установки длины кадра замыкание линий HS-SR позволяет генератору 6002 проводить калибровку замкнутой цепи, где генератор 6002 измеряет сопротивление замкнутой цепи для каждого передаваемого кадра.
Варианты генератора 6002 позволяют обмен данными с одной или несколькими схемами 6006, имеющимися в инструменте 6004. В определенных вариантах, схема 6006 в общем смысле может представлять собой любую схему для передачи и/или получения данных. В одном из вариантов, например, схема 6006 может хранить информацию, относящуюся к конкретному хирургическому инструменту 6004, с которым она связана. Такая информация может включать в себя, например, номер модели, серийный номер, число операций, в которых использовалось данный хирургический инструмент и/или любой другой вид информации. В дополнение к этому или вместо того, информация любого типа может передаваться схеме 6006 для хранения в ней. Такая информация может включать в себя, например, актуальное количество операций, в которых использовался хирургический инструмент 6004 и/или даты и/или время его использования. В определенных вариантах, схема 6006 может передавать данные, полученные одним или несколькими сенсорами (например, датчиком температуры, расположенном на инструменте). В определенных вариантах, схема 6006 может получать данные от генератора 6002 и предоставлять индикацию пользователю (например, светодиоды, информацию о переключении мощности, звуковую и/или визуальную индикацию), основанную на полученных данных.
В определенных вариантах, схема 6006 может иметь такую конфигурацию, при которой обмен данными между инструментом 6004 и генератором 6002 может осуществляться без необходимости в дополнительных проводниках для этой цели (например, выделенного проводника кабеля, соединяющего рукоятка с генератором 6002). В одном из вариантов, например, информация может идти к схеме и от нее с использованием схемы связи по однопроводной шине, реализованной на существующей кабельной сети, например, одном из проводников для передачи сигналов запроса от схемы преобразования сигнала схеме 6006 в инструменте. Таким образом, изменения или модификации в конструкции инструмента 6004, которые в ином случае были бы необходимы, минимизируются или уменьшаются. В дополнение к этому, поскольку различные виды связи могут реализовываться по обычному физическому каналу, (могут иметь либо не иметь разные полосы частот), наличие схемы 6004 может быть «невидимо» для генераторов, не имеющих функционала считывания необходимых данных, и таким образом поддерживая совместимость с предыдущими версиями инструмента 6004.
Генератор 6002 может обмениваться информацией со схемой 6006, касающейся данного хирургического устройства, совмещенного или подходящего для использования с кабелем 6008 и может включать в себя, например, номер модели, серийный номер, количество операций, в которых использовалось хирургическое устройство и/или любой другой вид информации. Информация также может передаваться генератором 6002 схеме 6006 для хранения в ней. В одном из вариантов, схема 6006 не должна обязательно располагаться на или в инструменте 6004, но может быть помещена в адаптер для связи конкретного типа или модели инструмента 6004 с генератором 6002.
На ФИГ. 122 представлена принципиальная схема схемы 6006 в инструменте 6004. Схема 6006 может быть связана с генератором для получения сигнала запроса с помощью пары проводящих элементов 6010, 6012. Схема 6006 может иметь несколько ветвей. Первая включает в себя контроллер 6014, вторая - линию передачи данных 6016, дополнительные ветви могут включать в себя дополнительные линии передачи данных 6018 или иные схемы, датчики, переключатели, индикаторы (звуковые, тактильные, визуальные). Контроллер 6014, линии передачи данных могут пассивно быть запитана от энергии в двоичных разрядах кадра. В других вариантах, контроллер 6014, линии передачи данных 6018 и/или иные схемы могут быть запитаны от других источников питания. В других вариантах, контроллер 6014, линии передачи данных 6018 и/или иные схемы могут пассивно быть запитаны от двухстороннего коммуникационного сигнала и иных источников питания.
Контроллер 6014 может представлять собой специализированную интегральную микросхему (СИМ), микроконтроллер с процессором и памятью, a цифровой сигнальный процессор, программируемое логическое устройство, программируемую пользователем логическую матрицу, дискретную схему и т.п. Контроллер имеет множество входов от S0 до Sn, где n - это подходящая целочисленная переменная. Как показано на ФИГ. 122, множество входных данных от S0 до Sn соединено с множеством переключателей от SW0 до SWn, где n - это любая целочисленная переменная. Переключатели от SW0 до SWn обеспечивают входные данные в контроллер 6014 для управления функциями инструмента 6004. Контроллер 6014 передает данные о состоянии переключателей от SW0 до SWn генератору 6002 по последовательному протоколу в соответствии с настоящим документом.
Контроллер 6014 также имеет множество выходных данных от O0 до Om, где m - это любая подходящая целочисленная переменная, которая может быть равна n. Выходные данные от O0 до Omуправляются контроллером 6014 в целях управления функциями инструмента 6004 в соответствии с информацией, передаваемой генератором 6002.
В различных вариантах, схема 6006 также может включать в себя одну или несколько линий передачи данных 6016, 6018, которые обмениваются данными по однопроводному протоколу. В определенных вариантах, линии передачи данных 6016, 6018 включают в себя элементы хранения, которые могут представлять собой однопроводное устройство с использованием шины (например, однопроводной протокол EEPROM), или иной однопроводной протокол или устройство, работающее по протоколу локальной коммутируемой сети (LIN). В одном из вариантов, например, элемент хранения данных 302 может иметь однопроводную память EEPROM. Элемент хранения данных - один из примеров элемента схемы, который может присутствовать в линиях передачи данных 6016, 6018. Линия передачи данных может дополнительно или вместо этого иметь один или несколько иных элементов или компонентов схемы, способных передавать и или получать данные. Такие элементы или компоненты схемы могут служить, например, для передачи данных, полученных одним или несколькими датчиками (например, датчиком температуры, расположенном на инструменте) и/или получать данные от генератора 6002 и предоставлять сведения пользователю (например, в виде светодиодной индикации или иной визуальной индикации) на основе полученных данных.
Во время работы генератор 6002 и схема 6006 обмениваются информацией по надежному, гибкому, с высокой степенью устойчивости к шуму коммуникационному протоколу согласно данному документу. Данный протокол используется двумя проводящими элементами инструмента 6010, 6012 (HS, HSR) и позволяет генератору 6002 передавать до 8 или более дискретных входных и выходных данных инструменту 6004, существуя на тех же линиях, что и однопроводная память EEPROM (например, линиях передачи данных 6016, 6018) с возможностью совмещения с более ранними версиями схем. Протокол включает в себя многократно передаваемый кадр. Кадр состоит из импульсов заголовка (двоичных разрядов), таких как старт/стоп и головных импульсов и одновременно кодируемых информационных импульсов (двоичных разрядов), которые кодируют и входную, и выходную информацию в единый импульс (двоичный разряд) путем модулирования амплитуды и ширины (длительности импульса) каждого информационного импульса.
Один из вариантов такого протокола проиллюстрирован на ФИГ. 123 и 124, где на ФИГ. 123 отображена временная схема 6020 импульсов тока в кадре последовательного протокола на выходе генератора 6002, а на ФИГ. 124 показана временная схема 6022 импульсов напряжения в кадре последовательного протокола на выходе схемы 6014. Обращаясь сначала к ФИГ. 123, описание которой следует читать вместе с ФИГ. 122, временная схема 6020 показывает выходной сигнал генератора 6002, передаваемый контроллеру 6014 в форме импульсов тока. Предельный ток (предельные значения) могут выбираться в зависимости от конкретной комбинации генератора 6002/инструмента 6006. В одном из вариантов, например, предельные значения тока составляют +15мА и -15мА. Кадр начинается и заканчивается на фазе нарастания 6023a, 6023b стартовых/стоповых импульсов 6024a, 6024b, генерируемых контроллером 6014 путем короткого замыкания каналов HS-SR. Кадр начинается в фазе нарастания 6023a стартового импульса 6024a и заканчивается в фазе нарастания 6023b импульса останова 6024b. Импульсы сигнала тока варьируются от отрицательного предела -I до положительного предела +I, проходя через нулевую точку во время передачи стартового импульса 6024a от генератора 6002 контроллеру 6014. После того, как сгенерирован стартовый импульс 6024, передаются головные импульсы 6026, 6028 и кодированная информация входа/выхода (I/O) 6025. После передачи последнего импульса кодированной информации 6025, фаза нарастания 6023b импульса останова 6024b сигнализирует окончание кадра тока. Затем инициируется следующий кадр, и процесс повторяется. В одном из аспектов двоичные разряды кадра помимо стартовых/стоповых импульсов 6024a, 6024b варьируются от 0 до отрицательного предела -I. В других аспектах некоторые двоичные разряды кадра, следующие за стартовым импульсом 6024a, варьируются от положительного предела +I до отрицательного предела -I. Последний аспект разъяснен далее в настоящем документе в пояснениях к ФИГ. 128.
Информационные импульсы кадра одновременно кодируются и по ширине и по амплитуде. Ширина стартовых/стоповых импульсов 6204a, 6024b-to. Импульсы тока, следующие за стартовым импульсом 6024a представляют собой головные импульсы 6026, 6028 и также имеют ширину импульса t0. В контексте кодирования выходные импульсы, несущие информацию от генератора 6002 инструменту 6004, информационные импульсы 6025 кодируются как логический выходной импульс «1» 6030 путем увеличения ширины импульса до t1, в то время как логический выходной импульс «0» 6032 может иметь такую же ширину импульса t0, как стартовый импульс 6024, головные импульсы 6026, 6028. Выходная логика «1» преобразуется в активное состояние выхода, где инструмент 6004 получает питание от генератора 6002. Как говорилось ранее, кадр начинается с нарастанием фазы 6023a стартового импульса тока 6024 путем короткого замыкания первого проводящего элемента 6010 (HS) со вторым проводящим элементом 6012 (SR), представляющих собой сигнальную шину и шину питания, соединяющую генератор 6002 с инструментом 6004.
На ФИГ. 124 изображена временная диаграмма 6022 импульсов напряжения +/-V, проходящих через нулевую отметку. На временной диаграмме 6022 изображены информационные импульсы входа/выхода (I/O), одновременно кодируемые с входной информацией от контроллера 6014 генератору 6002 (входные данные) и выходной информацией от генератора 6002 контроллеру 6014 (выходные данные). Помимо стартового импульса 6034a возникает последовательная передача информации между нулем и отрицательной частью сигнала. Как показано, логический входной сигнал напряжения «1»-V1 - отрицательный, но более положительный, чем логический входной сигнал напряжения «0»-V0. Входная логика «1» преобразуется в сигнал закрытого состояния переключателя (SW0-SWn).
Что касается временных диаграмм 6020, 6022, изображенных на ФИГ. 123, 124, рассматриваемых вместе со схемой 6006, изображенной на ФИГ. 122, кадр начинается в фазе нарастания 6023a стартового импульса 6034a и заканчивается в фазе нарастания импульса останова 6023b. Между ними кадр имеет два головных импульса 6040, 6042, передаваемых после стартового импульса 6024a и множества одновременно кодируемых информационных импульсов входа/выхода (I/O) 6044. В одном из вариантов, двоичные разряды 6048 между головными импульсами 6042, 6042 и информационными импульсами 6044 возвращаются к нулю и имеют ширину импульса t0. В других вариантах, как описано в настоящем документе далее в пояснениях к ФИГ. 128, двоичные разряды между головными импульсами 6042, 6042 и информационными импульсами 6044 возвращаются либо в положительное, либо в отрицательное предельное значение попеременно. Следует понимать, что одним из преимуществ такой конфигурации является использование дополнительного пассивного питания от сигналов кадра для питания схемы 6066.
Информационные импульсы 6044 кодируются для передачи информации о входных и выходных данных. Соответственно, каждый информационный импульс 6044 определяет первое логическое состояние, связанное с входными данными, переданными от инструмента 6004 генератору 6002, а также второе логическое состояние, связанное с выходными данными, переданными от генератора 6002 инструменту 6002. Одновременное кодирование сигналов входа/выхода (I/O) более подробно описано в пояснениях к ФИГ. 125A-D, где в целях ясности изложения изображены четыре логических состояния кодированного двоичного разряда входа/выхода (I/O).
Возвращаясь к ФИГ. 124: головной импульс 6040 представляет собой входную логику «0», а головной импульс 6042 представляет собой входную логику «1». Головные импульсы 6040, 6042 могут использоваться генератором 6002 для обнаружения наличия и идентификации типа схемы 6006. Генератор 6002 может использовать конкретные значения КАСЦ, считываемых для одного из или обоих головных импульсов 6040, 6042, или стартовый двоичный разряд 6084 для калибровки диапазонов КАСЦ для входных импульсов внутри кадра тока. Генератор 6002 определяет количество входных и выходных данных, используемых конкретным инструментом 6004 путем считывания параметров из памяти EEPROM 6016, 6018.
Количество входных/выходных импульсов на кадр может превышать количество используемых входных или выходных данных для данного инструмента 6004 или может представлять собой фиксированное число. Несмотря на то, что максимальное число и входных, и выходных данных - заданная величина, например 8 (всего 16), неиспользованные входные и выходные данные данного инструмента 6004 могут или не могут реализовываться или удаляться. Неиспользованные входные данные (если выходных данных больше, чем входных) могут быть отнесены схемой 6006 к логике «0». Неиспользованные выходные данные могут быть отнесены генератором 6002 к логическому состоянию «0» или «1» для оптимизации либо скорости опроса датчиков, либо передачи энергии схеме 6006. Схема 6006 хранит энергию от отрицательных импульсов для снабжения питанием свои собственные схемы и устройства вывода (например, светодиоды, переключатели, переключатели электропитания, в том числе транзисторы, устройства обратной связи, например, звуковой, визуальной, тактильной). Коммуникации EEPROM 6016, 6018 осуществляются на стороне положительного напряжения сигнала.
Обращаясь к легенде 6054 под временной диаграммой 6022, можно увидеть, что каждый информационный импульс 6044 имеет два возможных состояния входной логики (входная логика «1» и входная логика «0»), на которые указывают два отрицательных уровня напряжения -V1, -V0, и два возможных состояния выходной логики (выходная логика «1» и выходная логика «0»), на которые указывают две ширины импульса t1, t0. Соответственно, если происходит закрытие переключателя (SW0-SWn),следующий информационный импульс снижается до состояния входной логики «1»-V1, а если переключатель (SW0-SWn) остается открытым, следующий информационный импульс снижается до состояния входной логики «0»-V0. В том же временном интервале, если инструмент 6004 питается от генератора 6002, ширина импульса выходной логики «1» равна t1, а если инструмент 6004 не питается от генератора 6002, ширина импульса выходной логики «0» t0.
Как показано на временной диаграмме 6022, ширина импульса возврата в исходное положение 6034, головные импульсы 6040, 6042, импульсы выходной логики «0» и импульсы возврата к нулю 6048 все имеют ширину импульса t0. Только импульсы выходной логики «1» имеют ширину импульса t1, где t0
Как показано на ФИГ. 125A-D, информационный импульс 6056 может быть закодирован в двух из четырех состояний логики входа/выхода в ходе обмена данными между генератором 6002 и инструментом 6004, например, схемой 6006. На ФИГ. 125A, например, информационный импульс 6056A представляет собой входную логику «0» и выходную логику «0», потому что уровень напряжения логики -V0, а ширина импульса тока логики - t0. На ФИГ. 125B, например, информационный импульс 6056B представляет собой входную логику «0» и выходную логику «1», потому что уровень напряжения логики -V1, а ширина импульса тока логики -t0. На ФИГ. 125C, например, информационный импульс представляет 6056C собой входную логику «1» и выходную логику «0», потому что уровень напряжения логики -V0 а ширина импульса тока логики - t1. На ФИГ. 125D, например, информационный импульс представляет 6056D собой входную логику «1» и выходную логику «1», потому что уровень напряжения логики -V1 а ширина импульса тока логики - t1.
На ФИГ. 126 изображен один пример временной диаграммы 6064 последовательного протокола. Как показано на ФИГ. 126, и ссылаясь на ФИГ. 122, временная диаграмма 6064 представляет собой сигнал взаимодействия по протоколу, который включает в себя три серии входных данных и не имеет выходных данных. Входные данные, обозначенные как S0, S1 и S2 на ФИГ. 22, соединены с той частью схемы 6006, где расположен контроллер 6014. Три серии входных данных могут быть связаны с состоянием переключателей SW0, SW1, SW2, соединенных с контроллером 6014, или могут быть связаны с другими типами входных данных. Контроллер 6014 модулирует амплитуду соответствующего кодированного двоичного разряда до -V0 или -V1 в зависимости от состояния (открытого или закрытого) переключателей SW0, SW1, SW2. Кадр в этом примере состоит из стартового импульса 6034a, двух головных импульсов 6040, 6042 и трех информационных импульсов 6058, 6060, 6062, соответствующих состояниям переключателей SW0, SW1, SW2 всего для шести импульсов. Кадр заканчивается в фазе нарастания 6023b импульса останова 6034b.
Как показано на ФИГ. 126, первый и второй информационные импульсы 6058, 6060 представляют собой входную логику «0», показывающую, что входные переключатели SW0, SW1, SW2 открыты, а третий информационный импульс представляет собой входную логику «1», показывающую, что переключатель SW2закрыт. Поскольку выходы отсутствуют, нет закодированных выходных импульсов, кадр состоит из шести импульсов, трех импульсов заголовка (например, импульсов возврата в исходное состояние и головных импульсов 6034, 6040, 6042) и трех информационных импульсов 6058, 6060, 6062. Кадр многократно передается для информирования генератора 6002 о состоянии входных переключателей SW0, SW1, SW2 инструмента 6004. Когда в состоянии переключателей SW0, SW1, SW2 происходит изменение, двоичный разряд, связанный с этим переключателем, автоматически кодируется, и кадр повторяется.
На ФИГ. 127 изображен один пример временной диаграммы 6068 последовательного протокола. Как показано на ФИГ. 127, и ссылаясь на ФИГ. 122, временная диаграмма 6068 представляет собой сигнал взаимодействия по протоколу, который включает в себя четыре серии входных данных и две серии выходных данных. Входные данные, обозначенные как S0, S1, S2 и S3 на ФИГ. 22, соединены с той частью схемы 6006, где расположен контроллер 6014. Выходные данные связаны с O0 и O1 контроллера 6014. Четыре серии входных данных могут быть связаны с состоянием переключателей SW0, SW1, SW2, SW3,соединенных с контроллером 6014, или могут быть связаны с другими типами входных данных. Выходные данные O0 и O1 используются для управления различными функциями инструментами 6004, например, обеспечения звуковой, визуальной, тактильной обратной связи, управления питанием и другими функциями. Контроллер 6014 модулирует высоту импульса (амплитуду) соответствующих кодированных двоичных разрядов до -V0-V1 в зависимости от состояния (открытого или закрытого) переключателей SW0, SW1, SW2, SW3. Генератор 6002 модулирует ширину импульса (время) кодированного двоичного разряда в зависимости от информации управления выходными данными, которую генератор 6002 желает передать контроллеру 6014. Кадр в этом примере состоит из стартового импульса 6034a, двух головных импульсов 6040, 6042 и четырех информационных импульсов 6058, 6060, 6062, соответствующих состояниям переключателей SW0, SW1, SW2, SW3, всего для семи импульсов. Кадр заканчивается в фазе нарастания 6023b импульса останова 6034b.
Как показано на ФИГ. 127, контроллер 6014 закодировал первый двоичный разряд информации 6070 с входной и выходной информацией. Так, напряжение и ширина импульсов первого двоичного разряда информации 6070 модулируются для кодирования выходного сигнала как логики «0», а входного сигнала как логики «1». Таким же образом, контроллер 6014 закодировал второй двоичный разряд информации 6072 с входной и выходной информацией. Так, напряжение и ширина импульсов второго двоичного разряда информации 6072 модулируются для кодирования выходного сигнала как логики «1», а входного сигнала как логики «0». Поскольку в этом примере есть четыре серии входных данных и только две серии - выходных, третий и второй двоичные разряды 6074, 6076 кодируются только с входной информацией, где третий двоичный разряд 6074 кодируется как входная логика «1», а четвертый двоичный разряд кодируется как входная логика «0». Кадр многократно передается для информирования генератора 6002 о состоянии переключателей входа SW0, SW1, SW2, SW3 в инструменте 6004, а выходные данные O0 и O1 управляются контроллером 6014. Когда в состоянии переключателей SW0, SW1, SW2, SW3 происходит изменение или генератор 6002 собирается управлять одним из двух выходов O0 и O1, двоичные разряды, связанные с ними, автоматически кодируются и кадр повторяется.
На ФИГ. 128 представлен пример временных диаграмм 6080, 6083 серийного протокола. Что касается ФИГ. 128 и 122, верхняя кривая - это временная диаграмма тока 6080 как выходного сигнала генератора 6002. Сигнал тока варьируется от +I до -I , пересекая нулевую отметку. Эта временная диаграмма 6080 подает питание на схему 6014 непрерывно за исключением стартовых двоичных разрядов 6084, передачи входной логики «1» 6086 и условия «ошибки нет» двоичного разряда останова. Нижняя кривая 6082 - временная диаграмма напряжения в схеме 6014. Головной двоичный разряд 6104 начинает кадр, за которым следует один стартовый двоичный разряд 6084. 12 входных двоичных разрядов и 12 выходных двоичных разрядов одновременно кодируются в одном кадре, как говорилось ранее, где двоичные разряды входной логики кодируются путем модулирования амплитуды импульса, а двоичные разряды выходной логики кодируются путем модулирования ширины импульса. 12 двоичных разрядов информации затем передаются для кодирования 12 входных данных и 12 выходных данных. Как показано, входные данные #1 6086 закодированы как логика «1», а выходные данные #1 6090 закодированы как логика «0». Входные данные #2 6088 закодированы как логика «1», а выходные данные #2 6092 закодированы как логика «1». Входные данные #3 6094 закодированы как логика «0», а выходные данные #3 6092 закодированы как логика «1». Последний двоичный разряд представляет входные данные #12 6098, закодированные как логика «0» и выходные данные #12, закодированные как логика «0». Как показано, каждый второй двоичный разряд 6106 возвращается в область положительных значений, что обеспечивает дополнительное пассивное питание схемы 6006 инструмента 6004.
Хотя различные детали были изложены в предыдущем описании, следует понимать, что различные аспекты протокола последовательной передачи данных для медицинского устройства могут использоваться на практике без этих конкретных деталей. Например, для краткости и ясности выбранные аспекты показаны в форме блок-схемы, а не подробного описания. Некоторые части подробных описаний, представленных в настоящем документе, могут быть представлены в виде инструкций, которые работают с данными, хранящимися в компьютерной памяти. Такие описания и представления применяются специалистами в данной области для описания и доведения сути их работы до других специалистов в данной области. Как правило, алгоритмом называют логическую последовательность этапов, приводящих к получению желаемого результата, где «этап» относится к манипулированию физическими величинами, которые могут, хотя и не обязательно, принимать форму электрических или магнитных сигналов, которые можно сохранять, передавать, комбинировать, сравнивать и которыми можно иным образом манипулировать. В распространенной практике эти сигналы называют битами, значениями, элементами, символами, знаками, терминами, числами и т.п. Эти и аналогичные термины могут быть связаны с соответствующими физическими величинами, и они являются лишь удобными метками, применяемыми в отношении этих физических величин.
Если иное конкретно не указано, как очевидно из приведенного выше описания, следует понимать, что на протяжении приведенного выше описания использование таких терминов, как «обработка», или «вычисление», или «расчет», или «определение», или «отображение» и т.п., относится к действию или процессам компьютерной системы или аналогичного электронного вычислительного устройства, которое манипулирует и преобразует данные, представленные в виде физических (электронных) величин в регистрах и памяти компьютерной системы, в другие данные, аналогичным образом представленные в виде физических величин в памяти или регистрах компьютерной системы или другом таком устройстве хранения, передачи или отображения информации.
Необходимо отметить, что любая ссылка на «один аспект», «какой-либо аспект», «один вариант» или «какой-либо вариант» означает, что конкретное свойство, элемент или характеристика, описанные в связи с данным аспектом, включена по меньшей мере в один аспект. Таким образом, выражения «в одном аспекте», «в каком-либо аспекте», «в одном из вариантов» или «в каком-либо варианте» в различных фрагментах данной спецификации необязательно относятся к одному и тому же аспекту. Более того, конкретные свойства, структуры или характеристики могут сочетаться любым подходящим способом в одном или более аспектах.
Некоторые разновидности могут быть описаны с использованием выражения «соединен» «присоединен» наряду с однокоренными словами. Следует понимать, что данные термины не являются синонимами. Например, некоторые аспекты могут быть описаны с использованием термина «присоединен», обозначающего, что два или несколько элементов находятся в непосредственном физическом или электрическом контакте друг с другом. В другом примере, некоторые аспекты могут быть описаны с использованием термина «соединен», обозначающего, что два или несколько элементов находятся в непосредственном физическом или электрическом контакте. Однако термин «соединен» может означать, что два или несколько элементов не находятся в непосредственном контакте друг с другом, но все равно связаны и взаимодействуют друг с другом.
Необходимо отметить, что любая ссылка на «один аспект», «какой-либо аспект», «один вариант» или «какой-либо вариант» означает, что конкретное свойство, элемент или характеристика, описанные в связи с данным аспектом, включена по меньшей мере в один аспект. Таким образом, выражения «в одном аспекте», «в каком-либо аспекте», «в одном из вариантов», или «в каком-либо варианте» в различных фрагментах данной спецификации необязательно относятся к одному и тому же аспекту. Более того, конкретные свойства, структуры или характеристики могут сочетаться любым подходящим способом в одном или более аспектах.
Хотя в настоящем документе описаны различные варианты, специалистам в данной области может быть очевидна возможность множества модификаций, разновидностей, замен, изменений и эквивалентов для этих вариантов. Также для некоторых компонентов, для которых раскрыты материалы, могут применяться другие материалы. Поэтому следует понимать, что предыдущее описание и прилагаемые формулы изобретения должны охватывать все такие модификации и варианты как попадающие в рамки объема раскрытых вариантов. Предполагается, что следующие пункты формулы изобретения охватывают все такие модификации и варианты.
В общем смысле специалистам в данной области будет понятно, что различные разновидности, описанные в настоящем документе, которые могут быть реализованы, отдельно и/или вместе, посредством широкого спектра аппаратных и программных средств, встроенного программного обеспечения или любой их комбинации, могут рассматриваться с точки зрения компоновки из различных типов «электрических схем». Таким образом, термин «электрические схемы» используется в настоящем документе в значении, среди прочих, электрических схем, имеющих по меньшей мере одну отдельную электрическую схему, электрических схем, имеющих по меньшей мере одну интегральную схему, электрических схем, имеющих по меньшей мере одну специализированную электрическую схему, электрических схем, образующих неспециализированное вычислительное устройство, настроенное компьютерной программой (например, неспециализированный компьютер, настроенный компьютерной программой, который хотя бы частично выполняет процессы и/или поддерживает устройства, описанные в настоящем документе, или микропроцессор, настроенный компьютерной программой, который по меньшей мере частично выполняет процессы и/или поддерживает устройства, описанные в настоящем документе), электрических схем, образующих устройство памяти (например, образует память с произвольным доступом), и/или электрических схем, образующих устройство связи (например, модем, переключатель линий связи или оптико-электрическое оборудование). Специалистам в данной области будет понятно, что описанный в настоящем документе предмет изобретения может быть реализован аналоговым или цифровым способом или в виде их некоторой комбинации.
В приведенной выше подробной информации описаны различные варианты устройств и/или процессов с применением блок-схем, структурных схем и/или примеров. Поскольку такие блок-схемы, структурные схемы и/или примеры содержат одну или более функций и/или операций, специалистам в данной области будет понятно, что каждая функция и/или операция внутри таких блок-схем, структурных схем или примеров может быть реализована по отдельности и/или в совокупности широким диапазоном аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или практически любой их комбинации. В одном из вариантов, несколько частей объекта изобретения, описанного в настоящем документе, могут быть реализованы с помощью специализированных интегральных микросхем (СИМ), программируемых пользователем вентильных матриц (ППВМ), процессоров цифровой обработки сигналов (ЦОС) или других встроенных форматов. Однако специалистам в данной области будет понятно, что некоторые аспекты описанных в настоящем документе вариантов изобретения полностью или частично могут быть эквивалентно реализованы во встроенных схемах в виде одной или более компьютерных программ, работающих на одном или более компьютерах (например, в виде одной или более программ, работающих на одной или более компьютерных системах), в виде одной или более компьютерных программ, работающих на одном или более процессорах (например, в виде одной или более программ, работающих на одном или более микропроцессорах), в виде встроенного программного обеспечения или практически в виде любой их комбинации, а разработка схемы и/или написание кода для программного обеспечения и/или встроенного программного обеспечения в свете настоящего описания будет соответствовать навыкам специалиста в данной области. В дополнение к этому специалистам в данной области будет очевидно, что механизмы описанного в настоящем документе объекта изобретения могут распространяться в виде программного продукта в различных формах и что описанный в настоящем документе иллюстративный вариант осуществления объекта изобретения, описанный в настоящем документе, применяется независимо от конкретного типа среды, являющейся носителем сигнала, применяемой для действительного осуществления распространения. Примеры среды, являющейся носителем сигнала, включают в себя, без ограничений, следующие: записываемые типы носителей, такие как гибкий диск, накопитель на жестком магнитном диске, компакт-диск (CD), цифровой видеодиск (DVD), цифровая лента, компьютерная память и т.п.; и среда типа среды передачи сигнала, такая как цифровая и/или аналоговая среда связи (например, волоконно-оптический кабель, волновод, проводное коммуникационное соединение, беспроводное коммуникационное соединение (например, передатчик, приемник, передающая логическая схема, принимающая логическая схема и т.п.) и т.п.).
Все упомянутые выше патенты США, публикации заявок на патент США, заявки на патент США, иностранные патенты, заявки на иностранные патенты, публикации, не относящиеся к патентам, на которые ссылается данная спецификация и/или которые перечислены в любой инструкции по применению или любом ином материале, раскрывающем сущность изобретения, включены в данный документ по ссылке в той степени, в которой это согласуется с настоящим документом. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям настоящего документа, которая была включена в указанный документ путем ссылки. Любой материал или его часть, которая включена в настоящий документ путем ссылки и которая противоречит указанным определениям, положениям или другому описанию, представленному в настоящем документе, включается в настоящий документ в той мере, в которой между включенным путем ссылки материалом и настоящим документом с описанием не возникает противоречий.
Специалисту в данной области будет понятно, что описанные в настоящем документе компоненты (например, операции), устройства, объекты и сопровождающее их описание применяются в качестве примеров ради обеспечения концептуальной ясности, и что предполагаются различные модификации конфигурации. Следовательно, при применении в настоящем документе конкретные приведенные примеры и сопроводительное описание считаются представителями их более общих классов. Как правило, применение любого конкретного примера считается представляющим его класс, а не исключение конкретных компонентов (например, операций), устройств и объектов не следует считать ограничивающими.
В отношении применения по существу любых случаев множественного и/или единственного числа для терминов в настоящем документе специалисты в данной области могут изменять множественное на единственное и/или единственное на множественное в соответствии с требованиями контекста и/или сферой применения. Различные комбинации единственного/множественного числа для ясности в настоящем документе явным образом не указаны.
Описанный в настоящем документе объект изобретения иногда иллюстрирует различные компоненты, содержащиеся внутри или соединенные с различными другими компонентами. Следует понимать, что такие показанные архитектуры являются лишь примерами и что фактически могут быть реализованы многие другие архитектуры с такой же функциональностью. В концептуальном смысле любая конфигурация компонентов для достижения такой же функциональности эффективно «связана» так, чтобы желаемая функциональность была достигнута. Таким образом, любые два компонента, скомбинированные в настоящем документе для достижения конкретной функциональности, могут рассматриваться как «связанные» друг с другом так, чтобы достигалась желаемая функциональность, независимо от архитектур или промежуточных компонентов. Аналогичным образом любые два компонента, соединенные таким образом, можно рассматривать как «функционально соединенные» или «функционально связанные» друг с другом для достижения желаемой функциональности, а любые два компонента, которые могут быть связаны таким образом, также могут рассматриваться как «функционально соединяемые» друг с другом для достижения желаемой функциональности. Конкретные примеры функционально соединяемых компонентов включают в себя, без ограничений, физически сопрягаемые, и/или физически взаимодействующие компоненты, и/или беспроводно взаимодействующие, и/или логически взаимодействующие, и/или логически взаимодействующие компоненты.
В некоторых случаях применительно к одному или более компонентам могут использоваться термины «выполненный с возможностью», «с перестраиваемой конфигурацией», «функциональный/действующий для достижения какой-либо цели», «приспособленный/приспосабливаемый», «способный», «соответствующий/подходящий для» и т.д. Специалисты в данной области будут понимать, что «выполненный с возможностью» может в общем смысле охватывать компоненты рабочего состояния и/или компоненты нерабочего состояния и/или компонентов дежурного режима, если иное не подразумевается контекстом.
Хотя проиллюстрированы и описаны конкретные разновидности настоящего изобретения, описанные в настоящем документе, специалистам в данной области будет очевидно, что, в зависимости от изложенных в настоящем документе идей, изменения и модификации могут быть сделаны без отклонения от изобретения, описанного в настоящем документе и его более широких разновидностей и, соответственно, подразумевается, что прилагаемые формулы изобретения охватывают в своем контексте все такие изменения и модификации, которые соответствуют природе и сфере применения изобретения, описанного в настоящем документе. Специалистам в данной области следует понимать, что в общем смысле подразумевается, что термины, используемые в настоящем документе, и особенно в прилагаемых формулах изобретений (например, в тексте прилагаемых формул изобретений) обычно являются «открытыми» терминами (например, термин «в том числе» следует интерпретировать как «в том числе, но не ограничивая», термин «имеющий» следует интерпретировать как «имеющий по меньшей мере», термин «включает в себя» следует интерпретировать как «включает в себя, но не ограничивая» и т.д.). В дополнение к этому, специалистам в данной области следует понимать, что если подразумевается конкретное число перечислений пункта формулы изобретения, такое намерение должно быть явным образом изложено в пункте формулы изобретения, а при отсутствии такого перечисления данная интенция отсутствует. Например, в качестве пояснения, в следующих прилагаемых формулах изобретения могут содержаться вводные конструкции «по меньшей мере один» и «один или более» для ввода перечислений пункта формулы изобретения. Однако использование таких конструкций не следует интерпретировать таким образом, что введение перечисления в пункте формулы изобретения с использованием неопределенного артикля «a» или «an» (соответствующего неопределенному местоимению «какой-либо» в русском языке) ограничивает любой конкретный пункт формулы изобретения, содержащий такое вводное перечисление в пункте формулы изобретения пунктами, содержащими только одно такое перечисление, даже если такой же пункт включает в себя вводные конструкции «один или более» или «по меньшей мере один» и неопределенные артикли «a» или «an» (например, «a» и/или «an» обычно следует интепретировать как «по меньшей мере один» или «один или более”); Это справедливо и для определенных артиклей, используемых для ввода перечислений в пункте формулы изобретения.
В дополнение к этому, даже если конкретное число вводных перечислений в пункте формулы изобретения указано явным образом, специалисты в данной области будут понимать, что такое перечисление обычно следует интерпретировать как по меньшей мере указанное число (например, просто перечисление «двух перечислений» без иных модификаторов обычно означает по меньшей мере два перечисления или два и более перечислений). В дополнение к этому, в тех примерах, где используется условное обозначение, аналогичное «по крайней мере один из A, B и C и т.д.», в общем смысле подразумевается, что при такой конструкции специалист в данной области поймет данное условное обозначение (например, «система, имеющая по меньшей мере один из компонентов A, B и C» включает в себя, не ограничиваясь, системы, имеющие только A, только B, только C, A и B вместе, A и C вместе, B и C вместе и/или A, B и C вместе и т.д.). В тех случаях, когда используется условное обозначение, аналогичное «по меньшей мере один из элементов A, B или C и т.д.», по существу подразумевается, что при такой конструкции специалист в данной области поймет данное условное обозначение (например, «система, имеющая по меньшей мере один из компонентов A, B или C» включает в себя, не ограничиваясь, системы, имеющие только A, только B, только C, A и B вместе, A и C вместе, B и C вместе и/или A, B и C вместе и т.д.). В дополнение к этому, специалисты в данной области будут понимать, что обычно разделительное слово и/или выражение, представляющее два или более альтернативных термина, в описании, пунктах формулы изобретения или рисунках следует понимать как предположение возможности включения одного из терминов или обоих терминов, если иное не предполагается контекстом. Например, выражение «A или B» обычно понимается как подразумевающее возможности «A» или «B» или «A и B.»
В отношении приложенных пунктов формулы изобретения специалистам в данной области будет понятно, что перечисленные в них операции могут по существу выполняться в любом порядке. Также, хотя различные операционные потоки представлены в виде последовательности(-ей), следует понимать, что различные операции могут выполняться в других порядках, отличных от показанного, или же могут выполняться одновременно. Примеры таких альтернативных порядков могут включать в себя перекрывающийся, перемежающийся, прерываемый, перестраиваемый, инкрементный, предварительный, дополнительный, одновременный, обратный или другие варианты порядка, если контекст не требует иного. Более того, предполагается, что такие термины как «чувствительный к», «связанный с» или другие прилагательные прошедшего времени по существу не должны исключать таких вариантов, если контекст не требует иного.
В определенных случаях использование системы или метода может осуществляться на территории, даже если компоненты находятся вне этой территории. Например, в контексте распределенной обработки данных использование системы распределенной обработки данных может осуществляться на территории, даже несмотря на то, что части этой системы могут быть расположены за пределами этой территории (например, реле, сервер, процессор, среда-носитель сигнала, передающий компьютер, принимающий компьютер и т.д., расположенные за пределами территории).
Продажа системы или метода может подобным образом осуществляться на территории, даже если компоненты этой системы или метода расположены и/или используются за пределами этой территории. В дополнение к этому, реализация по меньшей мере части системы для выполнения метода на одной территории не исключает использование системы на другой территории.
Хотя в настоящем документе описаны различные варианты, специалистам в данной области может быть очевидна возможность множества модификаций, разновидностей, замен, изменений и эквивалентов для этих вариантов. Также для некоторых компонентов, для которых раскрыты материалы, могут применяться другие материалы. Поэтому следует понимать, что предыдущее описание и прилагаемые формулы изобретения должны охватывать все такие модификации и варианты как попадающие в рамки объема раскрытых вариантов. Предполагается, что следующие пункты формулы изобретения охватывают все такие модификации и варианты.
В целом использование описанных в настоящем документе принципов настоящего изобретения обеспечивает получение множества преимуществ. Вышеизложенное описание одного или более вариантов представлено в целях иллюстрации и описания. Считается, что описание не является исчерпывающим или ограничивающим точной раскрытым вариантом. В свете вышеуказанных идей возможны модификации или варианты. Были выбраны и описаны один или более вариантов для иллюстрации принципов и практического применения, таким образом позволяя специалистам в данной области использовать различные варианты осуществления изобретения с различными модификациями, соответствующими конкретной предполагаемой сфере применения. Предполагается, что полный объем определен в приложенных пунктах формулы изобретения.
ПРИМЕРЫ
В одной общей разновидности хирургический инструмент в сборе, представляющий принципы описанных вариантов, выполнен с возможностью выборочного рассечения, разрезания, коагуляции и захвата ткани в ходе хирургических процедур. Генератор может генерировать по меньшей мере один электрический сигнал, который может отслеживаться в привязке к первому набору логических условий. Когда выполнен первый набор логических условий, может быть запущен первый отклик генератора.
В определенных вариантах, отслеживается ультразвуковое сопротивление хирургического инструмента. Когда ультразвуковое сопротивление хирургического инструмента превышает пороговое сопротивление, резонансная частота по меньшей мере одного электрического сигнала может быть записана в память как базовая частота. В дополнение к этому, может быть запущен первый отклик генератора, когда либо выполнен первый набор логических условий или резонансная частота по меньшей мере одного электрического сигнала отличается от базовой частоты на базовый порог отклонения.
В определенных вариантах, может отслеживаться присутствие нагрузки в концевом зажиме хирургического инструмента. Первый отклик генератора может быть запущен, когда выполнен первый набор логических условий и обнаружено присутствие нагрузки.
В соответствии с одним общим вариантом, ультразвуковой хирургический инструмент, который включает в себя корпус рукоятки, выполненный с возможностью захвата его рукой, оснащен механизмом переключения. По меньшей мере в одном из вариантов, механизм переключения имеет первое устройство переключения, которое функционально закреплено на передней части корпуса рукоятки и может выборочно перемещаться относительно по меньшей мере одного первого контакта переключения. Механизм переключателя также имеет второе устройство переключения, которое может иметь по меньшей мере одну из правой кнопки переключения и левой кнопки переключения. Правая кнопка переключения может подвижно крепиться на правой стороне корпуса рукоятки и выборочно перемещаться относительно по меньшей мере одного правого контакта переключения, закрепленного в корпусе рукоятки. Левая кнопка переключения может подвижно крепиться на левой стороне корпуса рукоятки и выборочно перемещаться относительно по меньшей мере одного левого контакта переключения, закрепленного в корпусе рукоятки. Первое и второе устройства переключения могут быть выполнены с возможностью выборочной работы с ними при помощи одной руки, поддерживающей корпус рукоятки.
В соответствии с по меньшей мере одним общим вариантом, имеется ультразвуковой хирургический инструмент. По меньшей мере в одном варианте ультразвуковой хирургический инструмент имеет генератор для генерирования ультразвуковых сигналов и рукояточного блока, который включает корпус рукоятки, выполненный с возможностью его функционального захвата рукой. Инструмент также может иметь механизм переключения, который включает первое устройство переключения, которое функционально закреплено на передней части корпуса ручки и выборочно перемещается относительно по меньшей мере первого контакта переключения, который обменивается данными с генератором. Механизм переключателя также может включать в себя второе устройство переключения, которое может иметь по меньшей мере правую кнопку переключения или левую кнопку переключения. Правая кнопка переключения может подвижно крепиться на правой стороне корпуса рукоятки и выборочно перемещаться относительно по меньшей мере одного правого контакта переключения, закрепленного в корпусе рукоятки. По меньшей мере один правый контакт переключения может обмениваться данными с генератором. Левая кнопка переключения может подвижно крепиться на левой стороне корпуса рукоятки и выборочно перемещаться относительно по меньшей мере одного левого контакта переключения, закрепленного в корпусе рукоятки и может функционально сообщаться с генератором. Первое и второе устройства переключения могут быть выполнены с возможностью выборочной работы с ними при помощи одной руки, поддерживающей корпус рукоятки.
В соответствии с еще одним общим вариантом, ультразвуковой хирургический инструмент, который включает в себя корпус рукоятки, выполненный с возможностью захвата его рукой, оснащен механизмом переключения. По меньшей мере в одном варианте механизм переключения имеет кнопочный механизм, который подвижно крепится к корпусу рукоятки для выборочного осевого и поворотного движения относительно правого контакта переключения, центрального контакта переключения и левого контакта переключения так, что осевое движение кнопочного механизма в первом направлении приводит к тому, что кнопочный механизм активирует центральный контакт переключения, а поворотное движение кнопочного механизма в первом направлении поворота приводит к тому, что кнопочный механизм активирует левый контакт переключения, а поворотное движение кнопочного механизма во втором направлении поворота приводит к тому, что кнопочный механизм активирует правый контакт переключения.
Согласно различным вариантам, модуль коннектора может быть модульным компонентом, который может поставляться в качестве аксессуара с ультразвуковым хирургическим инструментом или его компонентами, но не быть соединенным с ним или может использоваться для ремонта, замены или модернизации ультразвуковых хирургических инструментов. В определенных вариантах, однако, модуль коннектора может быть связан с рукояточным блоком или ультразвуковым датчиком. В одном варианте модуль коннектора может иметь блок, который может легко сниматься и/или заменяться пользователем. Модуль коннектора также может иметь съемные элементы, позволяющие пользователю, например, снять и/или заменить вращающиеся соединительные элементы, проводники переключателей или соединительные элементы. Таким образом, в определенных вариантах, один или более модулей коннектора могут быть включены в качестве комплекта принадлежностей. Комплект принадлежностей может включать в себя различные вращающиеся соединительные элементы, выполненные с возможностью настраиваемого использования с одним или более ультразвуковых датчиков или ручных блоков. Комплект принадлежностей может включать в себя модули коннектора, вращающиеся соединительные элементы или корпуса с различными конфигурациями пользовательских интерфейсов, которые могут требовать одного, двух или более проводящих трактов.
В одном аспекте настоящее раскрытие предмета изобретения направлено на ультразвуковой хирургический инструмент. Ультразвуковой инструмент может иметь концевой зажим, волновод, идущий проксимально от концевого зажима по продольной оси и модуль коннектора, в который вставляется ультразвуковой рукоятка. Модуль коннектора может иметь корпус, образующий вращающийся центр, проходящий по продольной оси, соединительный узел, расположенный на вращающемся центре и вращающийся относительно корпуса, первый проводник, механически соединенный с корпусом и проходящий по меньшей мере частично вокруг продольной оси, и первый соединительный элемент, вращающийся вокруг продольной оси относительно первого проводника между первой позицией и второй позицией. Первый соединительный элемент может иметь первый контакт, расположенный так, чтобы иметь электрический контакт с первым проводником, когда первый соединительный элемент находится в первой позиции и во второй позиции, а второй контакт электрически соединен с первым контактом и расположен так, чтобы иметь электрический контакт с ультразвуковым рукояткой, когда первый соединительный элемент находится в первой и второй позициях.
В одной разновидности первый и второй проводники оба имеют проводящий контакт, выполненный с возможностью электрического соединения с пользовательским интерфейсом, который способен принимать сигналы управления питанием от пользователя. Ультразвуковой рукоятка может иметь возможность для электрического соединения с генератором и соединяться с возможностью вращения с первым и вторым соединительными элементами, когда он вставлен в модуль коннектора. Модуль коннектора может быть выполнен с возможностью электрического соединения схемы пользовательского интерфейса и генератора посредством ультразвуковой рукоятки, когда первый и второй соединительные элементы находятся, соответственно, в первой и второй позициях. В одной разновидности пользовательский интерфейс имеет рычажный переключатель, функционально соединенный с рукояточным блоком, а модуль коннектора закреплен на рукояточном блоке. Ультразвуковой рукоятка может вращаться относительно рукояточного блока, когда он вставлен в модуль коннектора. В одной разновидности корпус электрически изолирует первый и второй кондукторы друг от друга.
Различные разновидности предмета изобретения, описанные в настоящем документе, ориентированы на аппарат, имеющий схему, выполненную с возможностью передачи сигнала в виде последовательного протокола с помощью пары электрических проводников. Последовательный протокол может определяться как последовательность импульсов, распределенных по меньшей мере по одному кадру передачи. По меньшей мере один импульс в кадре передачи одновременно кодируется путем модулирования амплитуды импульса для представления одного из двух состояний первой логической схемы и модулирования ширины импульса для представления одного из двух состояний второй логической схемы.
Различные разновидности предмета изобретения, описанные в настоящем документе, ориентированы на инструмент, имеющий схему, выполненную с возможностью передачи сигнала в виде последовательного протокола с помощью пары электрических проводников. Последовательный протокол может определяться как последовательность импульсов, распределенных по меньшей мере по одному кадру передачи. По меньшей мере один импульс в кадре передачи может одновременно кодироваться путем модулирования амплитуды импульса для представления одного из двух состояний первой логической схемы и модулирования ширины импульса для представления одного из двух состояний второй логической схемы. Инструмент может также иметь устройство вывода, соединенное с выходом схемы; и устройство ввода, соединенное с входом схемы.
Различные разновидности изобретения, описанные в настоящем документе, ориентированы на генератор, имеющий схему преобразования сигнала, выполненную с возможностью передачи данных инструменту посредством двухпроводного интерфейса. Генератор может иметь схему управления, выполненную с возможностью передачи сигнала в виде последовательного протокола посредством пары электрических проводников. Последовательный протокол может определяться как последовательность импульсов, распределенных по меньшей мере по одному кадру передачи. По меньшей мере один импульс в кадре передачи одновременно кодируется путем модулирования амплитуды импульса для представления одного из двух состояний первой логической схемы и модулирования ширины импульса для представления одного из двух состояний второй логической схемы. Генератор также может иметь энергетическую схему, выполненную с возможностью приводить инструмент в действие.
Различные разновидности ориентированы на способы приведения в действие концевого зажима, соединенного с ультразвуковой системой привода ультразвукового хирургического инструмента. Может приниматься триггерный сигнал. В ответ на триггерный сигнал первый управляющий сигнал может подаваться на ультразвуковую систему привода для приведения в действие концевого зажима на первом уровне мощности. Первый управляющий сигнал может поддерживаться на протяжении первого периода. В конце первого периода второй управляющий сигнал может подаваться на ультразвуковую систему привода для приведения в действие концевого зажим на втором уровне мощности, который ниже первого уровня мощности.
В другой разновидности после получения триггерного сигнала хирургическая система генерирует обратную связь, уведомляющую о том, что ультразвуковой хирургический инструмент активирован, поддерживая ультразвуковой инструмент в неактивном состоянии. В конце порогового периода времени ультразвуковой хирургический инструмент активируется путем подачи управляющего сигнала ультразвуковой системе привода для приведения в действие концевого зажима.
В другой разновидности ультразвуковой хирургический инструмент активируется путем генерирования управляющего сигнала, передаваемого ультразвуковой системе приводов для приведения в действие концевого зажима. Множество входных переменных может применяться к модели с несколькими переменными для генерирования выходных данных модели с несколькими переменными, где выходные данные модели с несколькими переменными соответствуют воздействию ультразвукового инструмента на ткань. Множество входных переменных может иметь по меньшей мере одну переменную, характеризующую управляющий сигнал, и по меньшей мере одну переменную, характеризующую свойство ультразвукового хирургического инструмента. Когда выходные данные модели с несколькими переменными достигают порогового значения, может генерироваться обратная связь, уведомляющая о соответствующем состоянии по меньшей мере одного ультразвукового хирургического инструмента и ткани, на которую оказывает воздействие ультразвуковой хирургический инструмент.
В другой разновидности в ответ на триггерный сигнал первый управляющий сигнал на первом уровне мощности подается на ультразвуковую систему привода для приведения в действие концевого зажима. Первый управляющий сигнал поддерживается на первом уровне в течение первого периода. Второй управляющий сигнал подается на ультразвуковую систему привода для приведения в действие концевого зажим на втором уровне мощности, который ниже первого уровня мощности. Множество входных переменных может использоваться в модели с несколькими переменными для генерирования выходных данных модели с несколькими переменными. Выходные данные модели с несколькими переменными могут соответствовать воздействию ультразвукового инструмента на ткань, а множество переменных может иметь по меньшей мере одну переменную, характеризующую управляющий сигнал, и по меньшей мере одну переменную, характеризующую свойство ультразвукового хирургического инструмента. После того, как выходные данные модели с несколькими переменными превышают пороговое значение для порогового периода времени, может быть запущен первый отклик.
Хотя проиллюстрированы и описаны несколько вариантов, в намерения заявителя не входит ограничить объем и содержание прилагаемых формул изобретения такими подробностями. Возможны многие варианты, изменения и замещения, понятные специалистам в данной области, без отклонения от области действия изобретения. В дополнение к этому, структура каждого элемента, связанного с описанными вариантами, может быть альтернативно описана в качестве средства предоставления функции, выполняемой элементом. Таким образом, имеется в виду, что описанные варианты ограничиваются только объемом и содержанием прилагаемых формул изобретения.
Ссылки в спецификации на «различные варианты», «некоторые варианты», «один вариант» или «вариант» означает, что конкретное свойство, элемент или характеристика, описанные в отношении варианта, имеется по меньшей мере в одном варианте. Таким образом, выражения «в различных вариантах», «в некоторых вариантах», «в одном варианте» или «в каком-либо варианте», встречающиеся в данной спецификации, необязательно относятся к одному и тому же варианту. В дополнение к этому, конкретные особенности, структуры или характеристики могут быть скомбинированы любым подходящим способом в одном или более вариантах. Таким образом, конкретные конструктивные особенности, структуры или характеристики, показанные или описанные в связи с одним вариантом, могут без ограничений быть скомбинированы, полностью или частично, с конструктивными особенностями, структурами или характеристиками одного или более других вариантов осуществления.
Реферат
Группа изобретений относится к медицинской технике, а именно к ультразвуковым и электрохирургическим системам. Механизм переключения для ультразвукового хирургического инструмента, включающий корпус рукоятки, выполненный с возможностью его удерживания одной рукой, содержит первое устройство переключения, функционально закрепленное на передней части корпуса рукоятки, которое может выборочно поворачиваться относительно по меньшей мере одного первого контакта переключения, второе устройство переключения, правую или левую кнопки переключения. Правая кнопка переключения подвижно крепится на правой стороне корпуса рукоятки, может выборочно поворачиваться относительно по меньшей мере одного правого контакта переключения, закрепленного в корпусе рукоятки. Левая кнопка переключения подвижно крепится на левой стороне корпуса рукоятки, может выборочно поворачиваться относительно по меньшей мере одного левого контакта переключения, закрепленного в корпусе рукоятки. Первое и второе устройства переключения выполнены с возможностью выборочного нажатия одной рукой, в которой удерживается корпус рукоятки. Ультразвуковой хирургический инструмент включает в себя механизм переключения ультразвукового хирургического инструмента. Механизм переключения для ультразвукового хирургического инструмента имеет корпус рукоятки, выполненный с возможностью его удерживания одной рукой, кнопочный механизм, который подвижно крепится к корпусу рукоятки для выборочного осевого и поворотного движения относительно первого контакта переключения, центрального контакта переключения, правого контакта переключения и левого контакта переключения так, что осевое движение кнопочного механизма в первом направлении приводит к тому, что кнопочный механизм активирует центральный контакт переключения, а поворотное движение кнопочного механизма в первом направлении поворота приводит к тому, что кнопочный механизм активирует левый контакт переключения, а поворотное движение кнопочного механизма во втором направлении поворота приводит к тому, что кнопочный механизм активирует правый контакт переключения. Использование группы изобретений позволяет расширить арсенал ультразвуковых и электрохирургических систем. 3 н. и 17 з.п. ф-лы, 7 табл., 128 ил.
Формула
Документы, цитированные в отчёте о поиске
Хирургические рассекающие и сшивающие инструменты с отдельными и раздельными системами наложения крепежных элементов и рассечения ткани
Комментарии