Силовой модуль для применения с хирургическим инструментом - RU2674380C2
Код документа: RU2674380C2
Чертежи







Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее описание относится к хирургическим инструментам. В различных формах настоящее описание относится к силовому модулю для применения с хирургическими режущими и сшивающими инструментами с электропитанием.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Особенности и преимущества настоящего изобретения, а также способ их достижения станут более очевидными, а само изобретение станет более понятным после ознакомления со следующим описанием вариантов осуществления изобретения в сочетании с сопроводительными чертежами, причем:
на ФИГ. 1 представлен вид в перспективе силового модуля;
на ФИГ. 2 представлен вид в перспективе силового модуля, показанного на ФИГ. 1, с частично снятым сбоку корпусом;
на ФИГ. 3 представлен вид с пространственным разделением компонентов силового модуля, показанного на ФИГ. 1;
на ФИГ. 4 представлен вид с пространственным разделением компонентов силового модуля, показанного на ФИГ. 1;
на ФИГ. 5 представлен вид в разрезе вдоль продольной оси LL силового модуля, включающего в себя трансмиссионный элемент, взаимодействующий с первым вращательным приводом в первом положении;
на ФИГ. 5A представлен вид в разрезе силового модуля, показанного на ФИГ. 5, по линии 5A–5A на ФИГ. 5;
на ФИГ. 5B представлен вид в разрезе силового модуля, показанного на ФИГ. 5, по линии 5B–5B на ФИГ. 5;
на ФИГ. 6 представлен вид в разрезе силового модуля, показанного на ФИГ. 5, демонстрирующий частично выдвинутый первый осевой привод;
на ФИГ. 7 представлен вид в разрезе силового модуля, показанного на ФИГ. 5, демонстрирующий частично втянутый первый осевой привод;
на ФИГ. 8 представлен вид в разрезе силового модуля, показанного на ФИГ. 5, демонстрирующий трансмиссионный элемент в нейтральном положении;
на ФИГ. 9 представлен вид в разрезе силового модуля, показанного на ФИГ. 5, демонстрирующий трансмиссионный элемент, взаимодействующий со вторым вращательным приводом во втором положении;
на ФИГ. 10 представлен вид в разрезе силового модуля, показанного на ФИГ. 5, демонстрирующий трансмиссионный элемент, взаимодействующий со вторым вращательным приводом во втором положении, и демонстрирующий частично выдвинутый второй осевой привод;
на ФИГ. 11 представлен вид в перспективе хирургического инструмента;
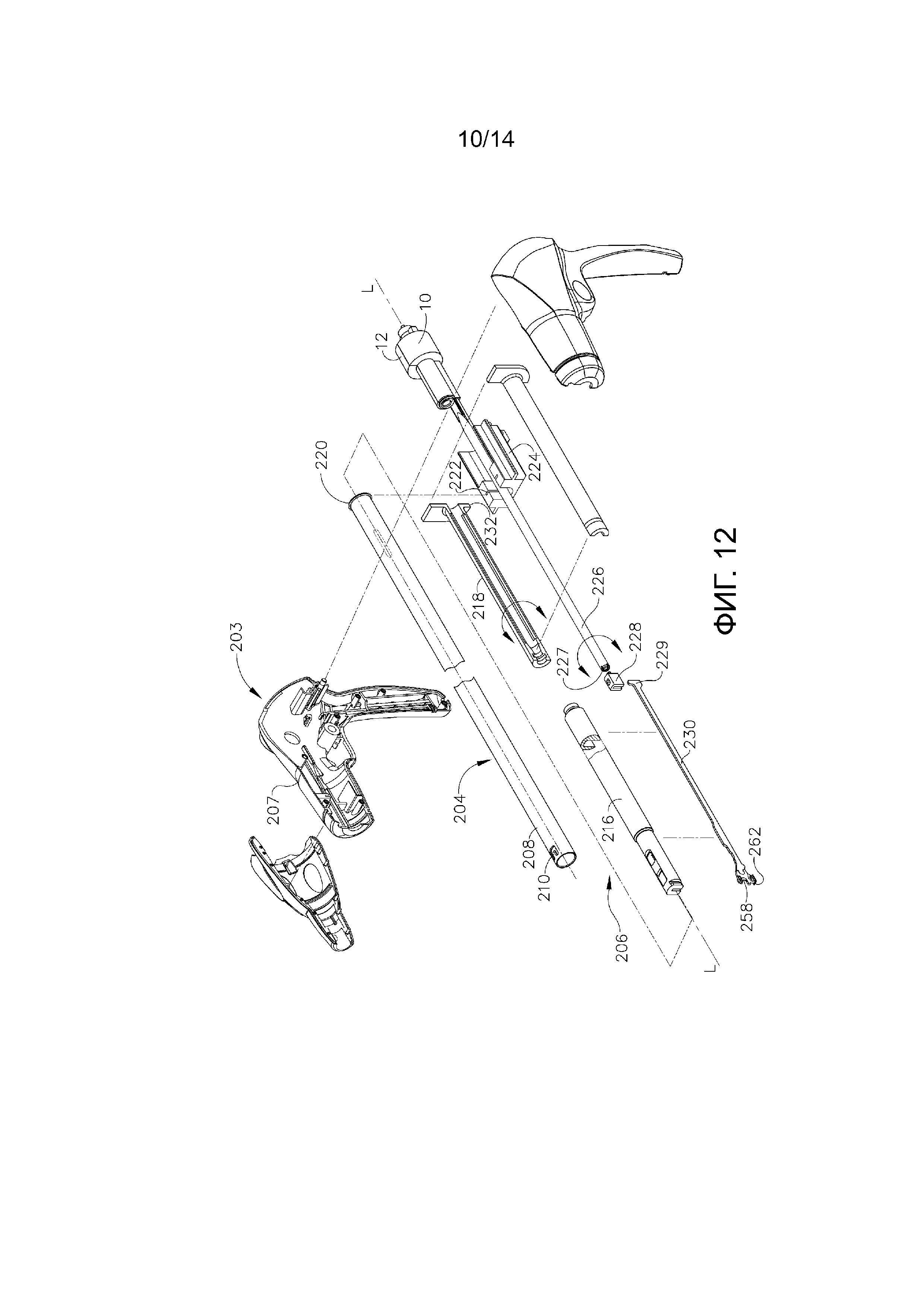
на ФИГ. 12 представлен общий вид с пространственным разделением компонентов хирургического инструмента, показанного на ФИГ. 11;
на ФИГ. 13 представлен вид в разрезе рукоятки хирургического инструмента, показанного на ФИГ. 11 и 12;
на ФИГ. 14 представлена принципиальная блок-схема цепи управления хирургического инструмента в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
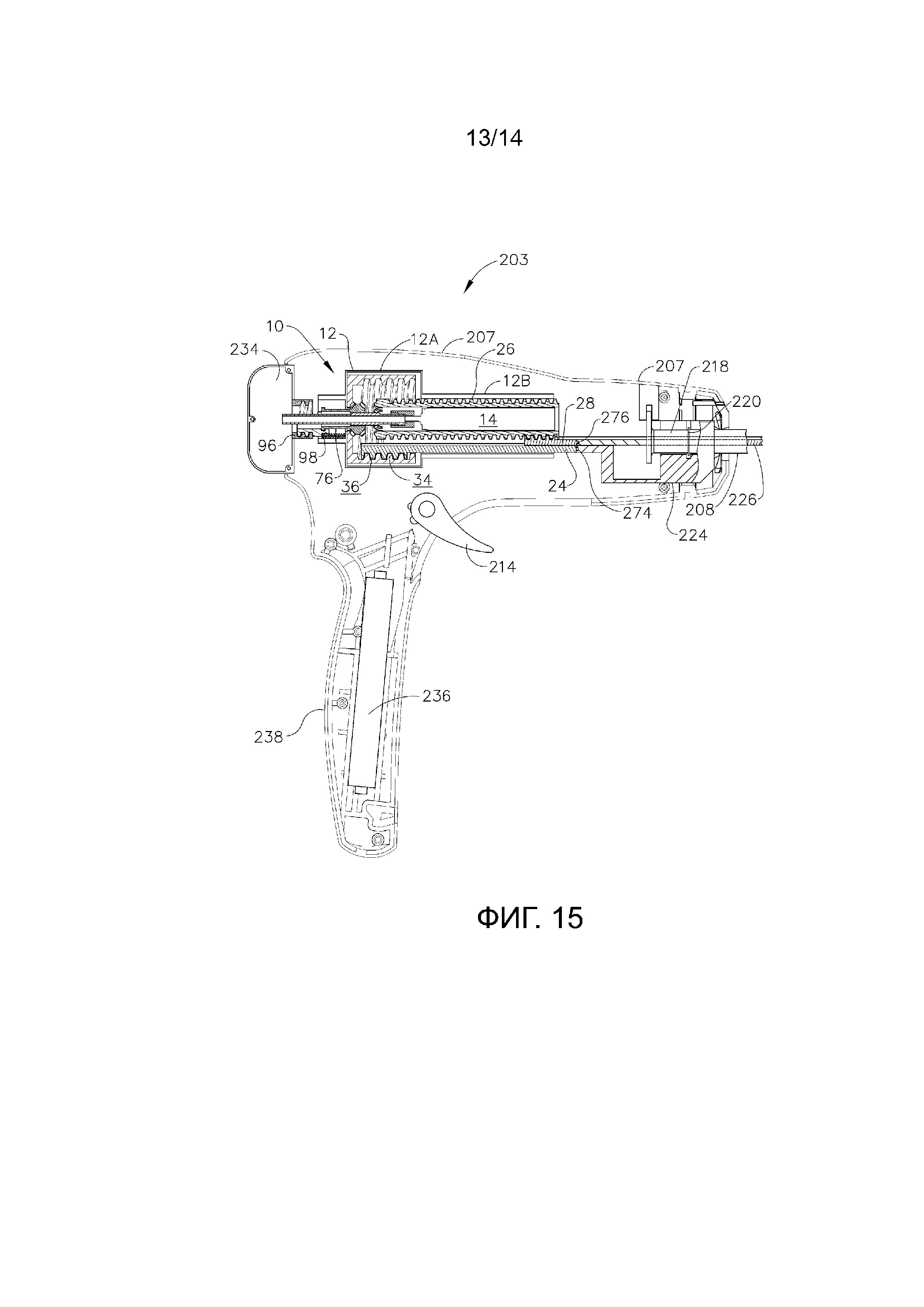
на ФИГ. 15 представлен вид в разрезе рукоятки хирургического инструмента в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе; и
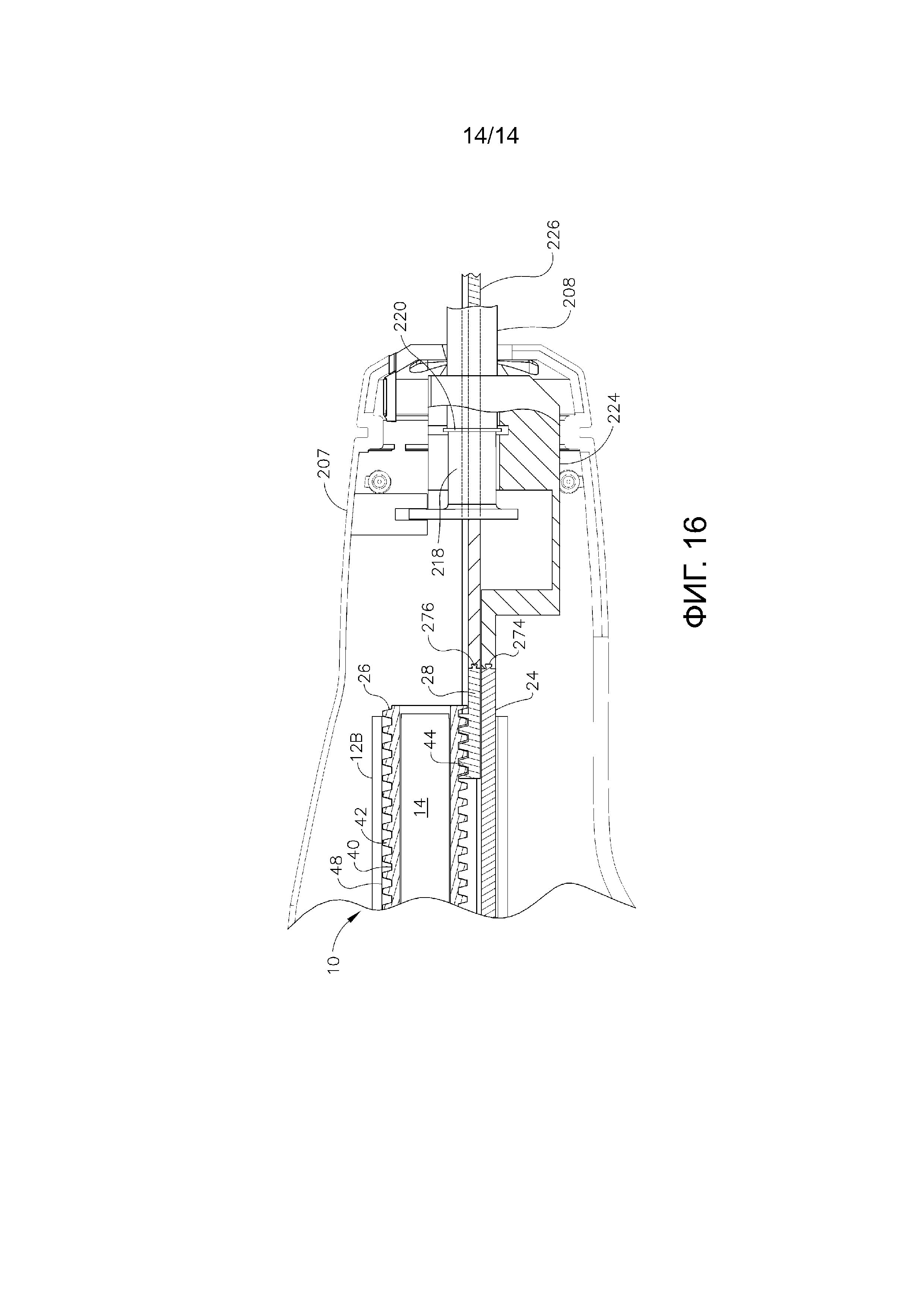
на ФИГ. 16 представлен частичный вид в разрезе рукоятки, показанной на ФИГ. 15.
ПОДРОБНОЕ ОПИСАНИЕ
Для обеспечения полного понимания принципов работы конструкции, функционирования, производства и применения устройств и способов, описанных в настоящем документе, приводится описание некоторых примеров осуществления. Один или более примеров данных вариантов осуществления показаны на сопроводительных чертежах. Специалистам в данной области будет понятно, что устройства и способы, конкретно описанные в настоящем документе и показанные на сопроводительных чертежах, представляют собой не имеющие ограничительного характера примеры осуществления и что объем различных вариантов осуществления настоящего изобретения определен только формулой изобретения. Элементы, показанные или описанные в связи с одним примером осуществления, можно комбинировать с элементами других вариантов осуществления. Предполагается, что объем настоящего изобретения включает в себя такие модификации и вариации.
В настоящем описании ссылка на «различные варианты осуществления», «некоторые варианты осуществления», «один вариант осуществления» или «вариант осуществления» и т.п. означает, что конкретный элемент, конструкция или характеристика, описанные в связи с вариантом осуществления, включены, по меньшей мере, в один вариант осуществления. Таким образом, фразы «в различных вариантах осуществления», «в некоторых вариантах осуществления», «в одном варианте осуществления» или «в варианте осуществления» и т.п. в настоящем описании не обязательно относятся к одному и тому же варианту осуществления. Более того, конкретные элементы, конструкции или характеристики можно комбинировать любым подходящим способом в одном или более вариантах осуществления. Таким образом, конкретные элементы, конструкции или характеристики, показанные или описанные в связи с одним вариантом осуществления, можно полностью или частично комбинировать с элементами, конструкциями или характеристиками одного или более других вариантов осуществления, без ограничений. Предполагается, что объем настоящего изобретения включает в себя такие модификации и вариации.
Термины «проксимальный» и «дистальный» в настоящем документе применяются в отношении врача, управляющего участком рукоятки хирургического инструмента. Термин «проксимальный» относится к участку, расположенному ближе к врачу, а термин «дистальный» относится к участку, удаленному от врача. Дополнительно следует понимать, что для удобства и ясности такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз», могут применяться в настоящем документе применительно к чертежам. Однако поскольку хирургические инструменты применяются во многих ориентациях и положениях, указанные термины не следует толковать как ограничивающие и/или абсолютные.
Представлены различные примеры устройств и способов для выполнения лапароскопических и минимально инвазивных хирургических вмешательств. Однако специалистам в данной области будет понятно, что различные способы и устройства, описанные в настоящем документе, могут применяться во множестве хирургических вмешательств и сфер применения, включая, например, те, которые связаны с открытыми хирургическими вмешательствами. Из настоящего подробного описания специалистам в данной области будет дополнительно понятно, что различные инструменты, описанные в настоящем документе, могут вставляться в тело любым способом, например, через естественное отверстие, через разрез или прокол, сформированный в ткани, и т.д. Рабочие участки или участки концевого эффектора инструментов могут вставляться непосредственно в тело или могут вставляться через устройство доступа, которое имеет рабочий канал, через который могут выдвигаться концевой эффектор и удлиненный ствол хирургического инструмента.
На ФИГ. 1 изображена одна форма силового модуля 10. Силовой модуль 10 может применяться для приведения в действие хирургического инструмента, такого как, например, хирургический инструмент 200 (см. ФИГ. 11), и может быть встроен в хирургический инструмент 200. Альтернативно, силовой модуль 10 может быть соединен с возможностью отсоединения с хирургическим инструментом 200. Как показано на ФИГ. 2–4, силовой модуль 10 может включать в себя корпус 12, узел 13 двигателя, первый узел 16 преобразования перемещений, второй узел 18 преобразования перемещений и трансмиссионный узел 20. В, по меньшей мере, одной форме узел 13 двигателя может включать в себя двигатель 14, который может быть прикреплен к корпусу 12 и может быть активирован для генерации вращательных движений, которые можно избирательно передавать посредством трансмиссионного узла 20 к первому узлу 16 преобразования перемещений или второму узлу 18 преобразования перемещений.
Как показано главным образом на ФИГ. 2, первый узел 16 преобразования перемещений может включать в себя первый вращательный привод 22, находящийся в функциональном взаимодействии с первым осевым приводом 24. Первый вращательный привод 22 может быть установлен с возможностью вращения в корпусе 12 и может быть механически ограничиваемым от поступательного перемещения в любом направлении. Кроме того, второй узел 18 преобразования перемещений может включать в себя второй вращательный привод 26, находящийся в функциональном взаимодействии со вторым осевым приводом 28. Второй вращательный привод 26 также может быть установлен с возможностью вращения в корпусе 12 и может механически ограничиваемым от поступательного перемещения в любом направлении, например, корпусом 12.
В дополнение к указанному выше, как показано главным образом на ФИГ. 3, второй вращательный привод 26 может вращаться вокруг продольной оси L–L, образованной двигателем 14. Как показано на ФИГ. 3, продольная ось L–L может проходить в продольном направлении через двигатель 14, который может располагаться концентрично со вторым вращательным приводом 26. Второй вращательный привод 22 может иметь форму полого цилиндра, причем двигатель 14 может быть расположен, по меньшей мере частично, в пределах второго вращательного привода 22. В некоторых формах двигатель 14 может представлять собой приводной щеточный двигатель постоянного тока с максимальной скоростью вращения, например, приблизительно 25 000 оборотов в минуту. В других конструкциях двигатель может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель.
В дополнение к указанному выше, как показано также на ФИГ. 3, первый вращательный привод 22 и второй вращательный привод 26 могут располагаться концентрически и могут иметь возможность вращения вокруг оси L–L. В некоторых ситуациях первый вращательный привод 22 и второй вращательный привод 26 могут иметь форму полого цилиндра, причем двигатель 14 может располагаться, по меньшей мере, частично в пределах второго вращательного привода 26, который, в свою очередь, может располагаться, по меньшей мере, частично в пределах первого вращательного привода 22. Концентрическое расположение двигателя 14, первого вращательного привода 22 и второго вращательного привода 26 в пределах корпуса 12 может уменьшить размер силового модуля 10.
Как показано главным образом на ФИГ. 3, первый вращательный привод 22 может быть соединен резьбовым соединением с первым осевым приводом 24, а второй вращательный привод 26 может быть соединен резьбовым соединением со вторым осевым приводом 28. Например, первый вращательный привод 22 может включать в себя внешнюю стенку 30 и внутреннюю стенку 32, которая может включать в себя внутреннюю резьбу 34, как показано на ФИГ. 3. Кроме того, первый осевой привод 24 может включать в себя первую рейку 36, которая может входить в функциональное взаимодействие с внутренней резьбой 34 первого вращательного привода 22 так, что вращение первого вращательного привода 22, например, по часовой стрелке, вокруг продольной оси L–L может вызывать поступательное перемещение первого осевого привода 24 по оси относительно корпуса 12, например, в дистальном направлении, а вращение первого вращательного привода 22 против часовой стрелки вокруг продольной оси L–L может вызывать поступательное перемещение первого осевого привода 24 по оси относительно корпуса 12, например, в проксимальном направлении.
В дополнение к указанному выше, второй вращательный привод 26 может включать в себя внутреннюю стенку 38 и внешнюю стенку 40, которая может включать в себя внешнюю резьбу 42, как показано на ФИГ. 2. Кроме того, второй осевой привод 28 может включать в себя вторую рейку 44, которая может входить в функциональное взаимодействие с внешней резьбой 42 второго вращательного привода 26 так, что вращение второго вращательного привода 26, например, по часовой стрелке, вокруг продольной оси L–L может вызывать перемещение второго осевого привода 28 по оси относительно корпуса 12, например, в дистальном направлении, а вращение второго вращательного привода 26, например, против часовой стрелки, вокруг продольной оси L–L может вызывать перемещение второго осевого привода 28 по оси относительно корпуса 12, например, в проксимальном направлении.
Как описано выше, двигатель 14, первый вращательный привод 22 и второй вращательный привод 26 могут располагаться концентрически в пределах корпуса 12 частично для того, чтобы уменьшить размер силового модуля 10. Для того чтобы вместить двигатель 14, как показано на ФИГ. 5A, внутренняя стенка 38 второго вращательного привода 26 может иметь диаметр D2, который превышает диаметр D1 внешней стенки 15 двигателя 14. Аналогично, чтобы вместить второй вращательный привод 26, внутренняя стенка 32 первого вращательного привода 22 может иметь диаметр D4, превышающий диаметр D3 внешней стенки 40 второго вращательного привода 26, как показано на ФИГ. 5B.
На ФИГ. 2 корпус 12 может содержать первую камеру 12A, которая может включать в себя первую внутреннюю стенку 46, а также вторую камеру 12B, которая может включать в себя вторую внутреннюю стенку 48. И первая внутренняя стенка 46, и вторая внутренняя стенка 48 могут иметь цилиндрическую или, по меньшей мере, по существу цилиндрическую форму, как показано на ФИГ. 2. Кроме того, первая внутренняя стенка 46 может иметь внутренний диаметр D6 (см. ФИГ. 5B), проходящий от одной стороны первой внутренней стенки 46 до противоположной стороны первой внутренней стенки 46 и пересекающий продольную ось LL, а вторая внутренняя стенка 48 может иметь внутренний диаметр D7 (см. ФИГ. 5A), проходящий от одной стороны второй внутренней стенки 48 до противоположной стороны второй внутренней стенки 48 и пересекающий продольную ось LL.
Как показано также на ФИГ. 2, первый вращательный привод 22 может располагаться в первой камере 12A корпуса 12 и может быть закреплен в ней с возможностью вращения. Для того чтобы вместить первый вращательный привод 22, как показано на ФИГ. 5B, внутренний диаметр D6 первой внутренней стенки 46 может быть существенно больше, чем внешний диаметр D5 первого вращательного привода 22, чтобы обеспечивать достаточный зазор для вращения первого вращательного привода 22 в пределах первой камеры 12A корпуса 12. Например, диаметр D6 может быть на 1–3 мм больше, чем диаметр D5. В некоторых примерах первая внутренняя стенка 46 камеры 12A и/или внешняя стенка 30 первого вращательного привода 22 могут контактировать друг с другом и могут быть покрыты снижающим трение материалом, таким как, например, политетрафторэтилен (ПТФЭ), или иными снижающими трение материалами. В некоторых примерах первый вращательный привод 22 может быть закреплен с возможностью вращения в пределах камеры 12A при помощи традиционной(-ых) подшипниковой(-ых) конструкции(-й). Настоящее описание предусматривает и другие способы снижения трения между внутренней стенкой 46 первой камеры 12A и внешней стенкой 30 первого вращательного привода 22. Кроме того, как показано на ФИГ. 2, первая камера 12A может включать в себя проксимальную стенку 50 и дистальную стенку 52 для механического ограничения поступательного перемещения первого вращательного привода 22 в любом направлении. Как показано на ФИГ. 2, проксимальная стенка 50 и дистальная стенка 52 могут быть разделены расстоянием L1, которое может несколько превышать длину L2 первого вращательного привода 22, чтобы обеспечивать достаточный зазор для закрепления первого вращательного привода 22 с возможностью вращения в пределах камеры 12A. Кроме того, внутренние поверхности стенок 50 и 52 могут быть покрыты снижающим трение материалом, таким как, например, политетрафторэтилен (ПТФЭ), или другими подходящими материалами с целью снижения трения между этими поверхностями и первым вращательным приводом 22.
Как показано главным образом на ФИГ. 2–3, второй вращательный привод 26 может располагаться или, по меньшей мере, частично располагаться во второй камере 12B и может быть закреплен с возможностью вращения в пределах второй камеры 12B. Двигатель 14 может быть установлен или, по меньшей мере, частично установлен в пределах второго вращательного привода 26, как показано на ФИГ. 2, и второй вращательный привод 26 может быть закреплен с возможностью вращения вокруг двигателя 14. Как описано выше, диаметр D2 внутренней стенки 38 второго вращательного привода 26 может превышать диаметр D1 внешней стенки 15 двигателя 14. В некоторых примерах диаметр D2 может существенно превышать диаметр D1, чтобы обеспечивать достаточный зазор для вращения второго вращательного привода 26 относительно двигателя 14. Например, диаметр D2 может быть на 1–3 мм больше, чем диаметр D1. В некоторых примерах внешняя стенка 15 двигателя 14 и внутренняя стенка 38 второго вращательного привода 26 могут контактировать друг с другом и могут быть покрыты снижающим трение материалом, таким как, например, политетрафторэтилен (ПТФЭ), который может снижать трение между внешней стенкой 15 двигателя 14 и внутренней стенкой 38 второго вращательного привода 26, когда второй вращательный привод 26 вращается относительно двигателя 14. В некоторых примерах второй вращательный привод 26 может быть закреплен с возможностью вращения относительно двигателя 14 при помощи традиционной(-ых) подшипниковой(-ых) конструкции(-й). Настоящее описание предусматривает и другие способы снижения трения между внутренней стенкой 38 второго вращательного привода 26 и внешней стенкой 15 двигателя 14.
В некоторых ситуациях, как показано на ФИГ. 2, по меньшей мере, проксимальный участок узла 13 двигателя и/или проксимальный участок второго вращательного привода 26 может проходить внутрь и помещаться в пределах первого вращательного привода 22. Кроме того, первый осевой привод 24 и/или второй осевой привод 28 может проходить или, по меньшей мере, частично проходить между первым вращательным приводом 22 и вторым вращательным приводом 26, как показано на ФИГ. 2, что позволяет уменьшить размер силового модуля 10. Кроме того, первый осевой привод 24 и/или второй осевой привод 28 может быть закреплен с возможностью перемещения по корпусу 12. В некоторых ситуациях первый осевой привод 24 может включать в себя два боковых выступа 54, которые могут проходить в продольном направлении вдоль длины первого осевого привода 24, и могут быть закреплены с возможностью перемещения в пределах двух противоположных выемок 56, проходящих в продольном направлении по противоположным стенкам второй камеры 12B. Аналогично, второй осевой привод 28 может включать в себя два боковых выступа 58, которые могут проходить в продольном направлении вдоль длины второго осевого привода 28 и могут быть закреплены с возможностью перемещения в пределах двух противоположных выемок 60, проходящих в продольном направлении по противоположным стенкам второй камеры 12B.
Как описано выше, первый осевой привод 24 может быть соединен резьбовым соединением с первым вращательным приводом 22 так, что первый осевой привод 24 может выдвигаться или втягиваться в ответ на вращательные движения первого вращательного привода 22. Шаг, угол и/или число витков резьбы 36 первого вращательного привода 22 можно выбирать для управления направлением, скоростью, величиной и/или продолжительностью поступательного перемещения первого осевого привода 24. Аналогично, второй осевой привод 28 может быть соединен резьбовым соединением со вторым вращательным приводом 26 так, что второй осевой привод 28 может выдвигаться или втягиваться в ответ на вращательные движения второго вращательного привода 26. Шаг, угол и/или число витков резьбы 42 второго вращательного привода 26 можно выбирать для управления направлением, скоростью, величиной и/или продолжительностью поступательного перемещения второго осевого привода 28.
Как показано главным образом на ФИГ. 4, узел 13 двигателя может передавать вращательные движения, генерируемые двигателем 14, на трансмиссионный узел 20. Например, узел 13 двигателя может включать в себя муфту 62 двигателя, которая может быть связана с выходным валом 64 двигателя. Кроме того, муфта 62 двигателя может быть функционально соединена с трансмиссионным валом 66, который может быть выполнен с возможностью передачи вращательных движений, генерируемых двигателем 14, на трансмиссионный узел 20. Например, как показано на ФИГ. 4, муфта 62 двигателя может включать в себя полый проксимальный участок, который может включать в себя проксимальную кольцевую стенку 68, расположенную вокруг продольной оси LL. Множество проходящих по оси шлицев 70 могут быть расположены по окружности кольцевой стенки 68 и могут выступать вовнутрь, к продольной оси LL. Кроме того, дистальный участок 72 трансмиссионного вала 66 также может включать в себя множество проходящих по оси шлицев 74, расположенных по окружности внешней стенки дистального участка 72 трансмиссионного вала 66. Шлицы 74 могут выступать наружу от внешней стенки дистального участка 72 и от продольной оси LL. В некоторых примерах двигатель 14 можно функционально отсоединить от трансмиссионного узла 20 путем втягивания трансмиссионного вала 66, высвобождая таким образом шлицы 74 из сопряженного взаимодействия со шлицами 70 муфты 62 двигателя. Такая конструкция может быть преимущественной при обеспечении возможности ручных манипуляций с силовым модулем 10, например, если двигатель 10 заклинит в процессе работы.
В процессе применения дистальный участок 72 трансмиссионного вала 66 может входить в полый проксимальный участок 68 муфты 62 двигателя, вводя шлицы 72 в сопряженное взаимодействие со шлицами 74 так, что вращательные движения, генерируемые двигателем 14, будут передаваться через муфту 62 двигателя на трансмиссионный вал 66, если шлицы 72 и 74 находятся в сопряженном взаимодействии. Следует понимать, что выходной вал 64 двигателя можно выполнить с возможностью работы в качестве трансмиссионного вала, сводя на нет необходимость в муфте двигателя.
Как показано на ФИГ. 3 и 4, трансмиссионный узел 20 может включать в себя трансмиссионный элемент 76, выполненный с возможностью приема вращательных движений, генерируемых двигателем 14, от трансмиссионного вала 66 и избирательной передачи таких вращательных движений на первый вращательный привод 22 или второй вращательный привод 26. Трансмиссионный элемент 76 может быть выполнен с возможностью избирательного перемещения вдоль продольной оси LL, например, в первое положение, нейтральное положение и/или второе положение. В первом положении, как показано на ФИГ. 5, трансмиссионный элемент 76 может входить в функциональное взаимодействие с первым вращательным приводом 22 так, что вращательные движения, генерируемые двигателем 14, могут вызывать вращение первого вращательного привода 22, таким образом вызывая поступательное перемещение первого осевого привода 24 в проксимальном направлении или дистальном направлении, в зависимости от направления вращения двигателя 14. Во втором положении, как показано на ФИГ. 9, трансмиссионный элемент 76 может входить в функциональное взаимодействие со вторым вращательным приводом 26 так, что вращательные движения, генерируемые двигателем 14, могут вызывать вращение второго вращательного привода 26, таким образом вызывая поступательное перемещение второго осевого привода 28 в проксимальном направлении или дистальном направлении, в зависимости от направления вращения двигателя 14. Кроме того, в нейтральном положении, как показано на ФИГ. 8, трансмиссионный элемент 76 может не входить в функциональное взаимодействие ни с первым вращательным приводом 22, ни со вторым вращательным приводом 26. Нейтральное положение может находиться между первым положением и вторым положением вдоль продольной оси LL так, что трансмиссионный элемент 76 может скользящим образом перемещаться, например, дистально из первого положения в нейтральное положение и из нейтрального положения во второе положение. Трансмиссионный элемент 76 также может скользящим образом перемещаться, например, проксимально из второго положения в нейтральное положение и из нейтрального положения в первое положение. Функциональное отсоединение двигателя 14 от первого вращательного привода 22 и второго вращательного привода 26 путем перевода трансмиссионного элемента 76 в нейтральное положение может обеспечить благоприятный эффект, позволяя осуществлять ручные манипуляции с силовым модулем 10. Например, если двигатель 14 заклинивает в процессе эксплуатации, оператор может перевести трансмиссионный элемент 76 в нейтральное положение и вручную переместить первый вращательный привод 22 и/или второй вращательный привод 26 в базовое положение.
Как показано на ФИГ. 3 и 4, трансмиссионный элемент 76 может, например, содержать шестереночный узел 78 на своем дистальном участке. Шестереночный узел 78 может включать в себя обращенный дистально передаточный участок 80 и обращенный проксимально передаточный участок 82. Кроме того, первый вращательный привод 22 может включать в себя кольцевую стенку 84 на своем проксимальном участке, как показано на ФИГ. 3, например. Кольцевая стенка 84 может располагаться вокруг продольной оси LL и может включать в себя передаточный участок 86, выступающий из нее дистально. Передаточный участок 86 может быть выполнен с возможностью зацепления с обращенным проксимально передаточным участком 82, когда трансмиссионный элемент 76 находится в первом положении, как показано на ФИГ. 5. Кроме того, второй вращательный привод 26 может включать в себя кольцевую стенку 88 на своем проксимальном участке, как показано на ФИГ. 4, например. Кольцевая стенка 88 может располагаться вокруг продольной оси LL и может включать в себя передаточный участок 90, выступающий из нее проксимально, как показано на ФИГ. 4. Передаточный участок 90 может быть выполнен с возможностью зацепления с обращенным дистально передаточным участком 80, когда трансмиссионный элемент 76 находится во втором положении, как показано на ФИГ. 9.
Как описано выше, трансмиссионный элемент 76 может быть выполнен с возможностью избирательного перемещения по оси между первым положением, нейтральным положением и вторым положением. Для поддержания функционального взаимодействия с трансмиссионным валом 66 в этих положениях трансмиссионный элемент 76 может содержать полую внутреннюю стенку 92 (см. ФИГ. 3), которая может быть по существу цилиндрической формы и может быть выполнена с возможностью скользящего приема трансмиссионного вала 66, который можно закрепить шпонкой для обеспечения вращательного соединения с трансмиссионным элементом 76 так, чтобы силы вращения могли передаваться от вала 66 к трансмиссионному элементу 76. Такая конструкция позволяет трансмиссионному элементу 76 скользить по оси между первым, нейтральным и вторым положениями, сохраняя функциональное взаимодействие с трансмиссионным валом 66.
Как показано на ФИГ. 3–5, трансмиссионный элемент 76 может входить в функциональное взаимодействие с исполнительным механизмом 96 посредством соединителя 98 так, чтобы исполнительный механизм 96 можно было активировать для избирательного поступательного перемещения трансмиссионного элемента 76 между первым, нейтральным и вторым положениями. В некоторых ситуациях исполнительный механизм 96 может содержать вращательную гайку 97, которая может находиться в резьбовом соединении с проксимальным участком соединителя 98, как показано на ФИГ. 3. Кроме того, соединитель 98 может быть функционально соединен с трансмиссионным элементом 76 таким образом, чтобы трансмиссионный элемент 76 мог свободно вращаться относительно соединителя 98, при этом позволяя соединителю 98 передавать осевые перемещения на трансмиссионный элемент 76 с целью перемещения трансмиссионного элемента 76 по оси между первым, нейтральным и вторым положениями. Например, соединитель 98 может включать в себя полый дистальный участок 100, который может содержать кольцевую стенку 102, проходящую вокруг продольной оси LL и содержащую кольцевую выемку 104, как показано на ФИГ. 5. Кроме того, трансмиссионный элемент 76 может включать в себя кольцевую кромку 106, выступающую из ее проксимального участка от продольной оси LL и проходящую вокруг продольной оси LL, как показано на ФИГ. 3. Выемка 104 может быть выполнена с возможностью приема в нее кольцевой кромки 106, как показано на ФИГ. 5. Кольцевая кромка 106 может свободно вращаться относительно выемки 104, таким образом позволяя трансмиссионному элементу 76 свободно вращаться относительно соединителя 98. Однако кольцевая кромка 106 может быть ограничена в осевых перемещениях относительно выемки 104, что может позволять соединителю 98 передавать осевые перемещения на трансмиссионный элемент 76.
В дополнение к указанному выше, как показано на ФИГ. 7 и 8, исполнительный механизм 96 может вращаться в первом направлении, например, по часовой стрелке, заставляя соединитель 98, который находится в резьбовом соединении с исполнительным механизмом 96, поступательно перемещаться, например, в дистальном направлении, в результате чего трансмиссионный элемент 76 будет поступательно перемещаться дистально из первого положения, как показано на ФИГ. 5, в нейтральное положение, как показано на ФИГ. 8. В результате обращенный проксимально передаточный участок 80 шестереночного узла 78 может поступательно перемещаться дистально из первого положения в нейтральное положение, а также за пределы зубчатого зацепления с передаточным участком 86 первого вращательного привода 22, как показано на ФИГ. 8. Кроме того, как показано на ФИГ. 8 и 9, исполнительный механизм 96 может дополнительно вращаться в первом направлении, чтобы вызвать дополнительное поступательное перемещение соединителя 98 в дистальном направлении. Такое дополнительное перемещение соединителя 98 может вызывать дополнительное дистальное перемещение трансмиссионного элемента 76 из нейтрального положения, как показано на ФИГ. 8, во второе положение, как показано на ФИГ. 9. Такое перемещение трансмиссионного элемента 76 может вызывать перемещение обращенного дистально передаточного участка 80 в зубчатое зацепление с передаточным участком 90 второго вращательного привода 26.
Для возврата трансмиссионного элемента 76 из второго положения в нейтральное положение исполнительный механизм 96 можно повернуть во втором направлении, противоположном первому направлению, например, против часовой стрелки, что может вызвать поступательное перемещение соединителя 98 в проксимальном направлении, таким образом перемещая трансмиссионный элемент 76 проксимально в нейтральное положение и за пределы зубчатого зацепления с передаточным участком 90 второго вращательного привода 26. Кроме того, для возврата трансмиссионного элемента 76 в первое положение исполнительный механизм 96 можно дополнительно повернуть во втором направлении, что может вызвать дополнительное проксимальное поступательное перемещение соединителя 98, таким образом дополнительно перемещая трансмиссионный элемент 76 проксимально во второе положение и в зубчатое зацепление с передаточным участком 86 первого вращательного привода 22.
Как показано на ФИГ. 5–7, как более подробно описано выше, первый вращательный привод 22 может располагаться в камере 12A корпуса 12. В некоторых ситуациях для снижения трения между первым вращательным приводом 22 и камерой 12A при вращении первого вращательного привода 22 в ответ на вращательные движения, генерируемые двигателем 14, проксимальная стенка 50 и дистальная стенка 52 камеры 12A, которые механически ограничивают первый вращательный привод 22 от осевых поступательных перемещений, могут быть достаточно разнесены друг от друга, чтобы обеспечивать зазор для вращения первого вращательного привода 22. Например, как показано на ФИГ. 5, показано расстояние C зазора между дистальной стенкой 52 и первым вращательным приводом 22. Соответственно, в таких ситуациях первый вращательный привод 22 может немного поступательно перемещаться по оси между проксимальной стенкой 50 и дистальной стенкой 52 в пределах оставленного расстояния C зазора. Однако расстояние C зазора не может быть достаточно велико, чтобы допустить случайное выведение передаточного участка 86 первого вращательного привода 22 за пределы зубчатого зацепления с трансмиссионным элементом 76 в процессе эксплуатации.
В дополнение к указанному выше, между корпусом 12 и соединителем 98 может располагаться смещающий элемент 103, такой как, например, спиральная пружина, как показано на ФИГ. 5. Смещающий элемент 103 может оказывать смещающее воздействие на соединитель 98 в проксимальном направлении, которое может передаваться на трансмиссионный элемент 76 и, в свою очередь, на первый вращательный привод 22 при взаимодействии с трансмиссионным элементом 76 в первом положении. Смещающее воздействие смещающего элемента 103 может обеспечить, чтобы передаточный участок 86 первого вращательного привода 22 и трансмиссионный элемент 76 оставались в зубчатом зацеплении в процессе эксплуатации, пока трансмиссионный элемент 76 находится в первом положении. В таких ситуациях исполнительный механизм 98 должен преодолеть смещающее воздействие, оказываемое смещающим элементом 103 на соединитель 98, чтобы успешно поступательно переместить соединитель 98 и, в свою очередь, трансмиссионный элемент 76 дистально, например, в нейтральное положение, что может вызвать сжимание смещающего элемента, как показано на ФИГ. 8.
Как показано на ФИГ. 5, в, по меньшей мере, одной форме двигатель 14 может быть прикреплен к корпусу 12. Например, как показано на ФИГ. 5, дистальный участок 107 двигателя 14 может быть жестко связан с дистальным участком 108 камеры 12B, например, посредством винтов или других подходящих механических крепежных элементов 110. Настоящее описание предусматривает и другие способы крепления двигателя 14 к корпусу 12. Кроме того, второй вращательный привод 26 может быть связан с возможностью вращения с дистальным участком 108 камеры 12B, которая механически ограничивает второй вращательный привод 26 от перемещения по оси. Например, дистальная кромка 112 может проходить вокруг и выступать из дистального участка второго вращательного привода 26, как показано на ФИГ. 5. Дистальная кромка 112 может быть закреплена с возможностью вращения и механически ограничена от перемещения по оси в пределах дистального участка 108 камеры 12B.
На ФИГ. 11 представлен пример хирургического инструмента 200, который может применяться с силовым модулем 10. В, по меньшей мере, одной форме хирургический инструмент 200 может включать в себя рукоятку 203, ствол 204 и концевой эффектор 202, который может вращаться относительно ствола 204 вокруг продольной оси LL. Концевой эффектор 202 выполнен с возможностью работы в качестве эндоскопического рассекателя для зажатия, рассечения и сшивания ткани. Однако следует понимать, что различные альтернативные варианты осуществления могут включать в себя концевые эффекторы, выполненные с возможностью работы в качестве других хирургических устройств, включая, например, зажимы, режущие инструменты, сшивающие инструменты, клипсонакладыватели, устройства доступа, устройства доставки препаратов лекарственной/генной терапии, ультразвуковые, РЧ и/или лазерные устройства и т.д. См., например, патент США № 8,322,455 под названием «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СКРЕПЛЯЮЩИЙ ИНСТРУМЕНТ С РУЧНЫМ ПРИВОДОМ», полное описание которого включено в настоящий документ путем ссылки.
В дополнение к указанному выше, как показано также на ФИГ. 11, рукоятка 203 инструмента 200 может включать в себя спусковой механизм 214 для активации концевого эффектора 202. Следует понимать, что инструменты с концевыми эффекторами, относящиеся к различным хирургическим задачам, могут иметь различное число или типы спусковых механизмов или других подходящих средств управления для работы с концевым эффектором. Концевой эффектор 202 соединен с рукояткой 203 с помощью ствола 204. Следует понимать, что пространственные термины, такие как вертикальный, горизонтальный, правый, левый и т.д., приведены в настоящем документе в отношении рисунков с учетом предположения о том, что продольная ось хирургического инструмента 200 расположена коаксиально центральной оси ствола 204, причем спусковой механизм 214 направлен вниз под острым углом от низа рукоятки 203. Однако в действительной практике хирургический инструмент 200 может быть ориентирован под разными углами, и как таковые эти пространственные термины применяются относительно самого хирургического инструмента 200. Дополнительно термин «проксимальный» применяется для обозначения угла зрения врача, который находится позади рукоятки 203 и размещает концевой эффектор 202 дистально, или от себя.
Как показано на ФИГ. 11, концевой эффектор 202 хирургического инструмента 200 показан в закрытой конфигурации, с кассетой 250 со скобами, расположенной в пределах удлиненного канала 252. На нижней поверхности упора 256 может быть расположено множество углублений для формирования скоб, соответствующих множеству полостей 254 для скоб, включающих обращенные вверх отверстия в верхней поверхности кассеты 250 со скобами. Держатель 258 скальпеля (см. ФИГ. 12) может выдвигаться через кассету 250, разрезая ткань, захваченную между упором 256 и кассетой 250 со скобами. Кассета 250 со скобами может включать в себя формованный корпус 260 кассеты, который может удерживать множество скоб (не показаны), которые могут быть уложены на выталкиватели скоб (не показаны) в пределах полостей 254 для скоб. Двутавровый элемент 262 может дистально выталкивать клиновидные салазки (не показаны), которые скользят по лотку кассеты (не показан), который удерживает вместе различные компоненты сменной кассеты 250 со скобами. Клиновидные салазки могут поднимать вверх выталкиватели скоб для выталкивания скоб в деформирующий контакт с упором 256, в то время как скальпель 258 рассекает зажатую ткань. См., например, заявку на патент США № 13/803,130 под названием «КОНСТРУКЦИИ С АВТОРЕГУЛИРОВКОЙ ПРИВОДА ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», поданную 14 марта 2013 г., полное описание которой включено в настоящий документ путем ссылки.
Как показано на ФИГ. 11 и 12, удлиненный канал 252 может быть связан с рукояткой 203 посредством узла 206 цапфы, который может включать в себя проксимальный участок 218 цапфы и дистальный участок 216 цапфы, который может быть закреплен с возможностью вращения относительно проксимального участка 218 цапфы. Удлиненный канал 252 может быть связан с дистальным участком 218 цапфы и может включать в себя криволинейные пазы упора, которые могут шарнирно принимать соответствующий штифт упора, находящийся на упоре 256. Кроме того, на узел 206 цапфы может надеваться закрывающая гильза 208, которая может включать в себя дистально расположенный язычок 210, который взаимодействует с закрывающим язычком упора, находящимся на упоре 256, таким образом вызывая открывание или закрывание упора 256 посредством перемещения гильзы 208 по оси вдоль продольной оси LL и относительно узла 206 цапфы. Кроме того, гильза 208 может быть связана с возможностью вращения с дистальным участком 218 цапфы так, что вращение гильзы 208 может вызывать вращение дистального участка 218 цапфы и, в свою очередь, концевого эффектора 202 относительно проксимального участка 218 цапфы.
В дополнение к указанному выше, гильза 208 может включать в себя кольцевую кромку 220, проходящую вокруг продольной оси LL и выступающую из проксимального участка гильзы 208, как показано на ФИГ. 12. Кроме того, кромка 220 может быть закреплена с возможностью вращения в пазу 222 в элементе-каретке 224 в пределах рукоятки 203 так, что гильза 208 может свободно вращаться относительно элемента-каретки 224, и так, что гильза 208 может выдвигаться дистально и втягиваться проксимально вдоль продольной оси LL путем выдвигания и втягивания элемента-каретки 224. Кроме того, элемент-каретка 224 может быть связан с первым осевым приводом 26, как показано на ФИГ. 13. Соответственно, вращение первого вращательного привода 22 в первом направлении, например, по часовой стрелке, может вызывать поступательное дистальное перемещение первого осевого привода 24, как более подробно описано выше, что может вызывать поступательное дистальное перемещение элемента-каретки 224 и, в свою очередь, элемента-гильзы 208. В результате язычок 210 гильзы 208 может взаимодействовать с закрывающим язычком упора 256 и прикладывать воздействие по типу кулачка к упору 256, таким образом переводя концевой эффектор 202 из открытой конфигурации в закрытую конфигурацию. В некоторых ситуациях можно применять смещающий элемент (не показан) для поддержания упора 256 в открытой конфигурации. В таких ситуациях воздействие по типу кулачка, прикладываемое язычком 210 к упору 256 при выдвигании гильзы 208 дистально, должно преодолеть смещающее воздействие, создаваемое смещающим элементом, чтобы перевести концевой эффектор 202 в закрытую конфигурацию. Также в таких ситуациях втягивание гильзы 208 проксимально путем вращения первого вращательного привода 22 во втором направлении, противоположном первому направлению, может высвобождать упор 256, таким образом позволяя смещающему элементу переместить упор 256 в открытую конфигурацию. Следует понимать, что можно использовать и другие конструкции, чтобы подтолкнуть упор 256 к перемещению между закрытой конфигурацией и открытой конфигурацией в ответ на осевые движения первого осевого привода 24.
Как более подробно описано выше, второй осевой привод 28 может выдвигаться дистально и втягиваться проксимально вдоль продольной оси LL в ответ на вращательные движения, создаваемые двигателем 14. Как показано на ФИГ. 13 и 14, двутавровый элемент 262 может быть функционально соединен со вторым осевым приводом 28 так, что двутавровый элемент 262 может выдвигаться дистально для размещения скоб из кассеты 250 со скобами и/или для разрезания ткани, захваченной между упором 256 и кассетой 250 со скобами, когда второй осевой привод 28 выдвигается дистально, и может втягиваться проксимально, когда второй осевой привод 28 втягивается проксимально.
Как показано также на ФИГ. 13, второй осевой привод 28 может быть связан с пусковым приводом 226, который может быть расположен с возможностью скольжения в пределах проксимального участка 218 шлица. Кроме того, двутавровый элемент 262 может быть расположен на дистальном участке пускового ствола 230, который может быть функционально соединен с пусковым приводом 226 посредством соединительного элемента 228, причем пусковой ствол 230 может быть расположен с возможностью скольжения в пределах дистального участка 216 шлица. Кроме того, пусковой привод 226 может содержать сужающийся дистальный участок 227, который может входить внутрь полого проксимального участка соединительного элемента 228. Например, сужающийся дистальный участок 227 может быть выполнен с возможностью защелкивающегося соединения с полым проксимальным участком соединителя 227 так, что соединительный элемент 228 может вращаться вокруг продольной оси LL относительно пускового привода 226. Кроме того, соединительный элемент 228 может включать в себя прорезь 231 на своем дистальном участке, которая может быть выполнена с возможностью фрикционного приема вертикального язычка 229, расположенного на проксимальном участке пускового ствола 230. Такой пример конструкции позволяет передавать осевые движения от второго осевого привода 28 к двутавровому элементу 262. Например, второй осевой привод 28 можно выдвигать дистально вдоль продольной оси LL путем вращения второго вращательного привода 26 в первом направлении, например, по часовой стрелке. В свою очередь, пусковой привод 226, соединительный элемент 228 и пусковой ствол 230 могут выдвигаться дистально в ответ на выдвигание второго осевого привода 28, что может вызывать выталкивание двутавровым элементом 262 скоб из кассеты 250 со скобами и/или разрезание ткани, захваченной, например, между упором 256 и кассетой 250 со скобами. Кроме того, второй осевой привод 28 можно втягивать проксимально вдоль продольной оси LL путем вращения второго вращательного привода 26 во втором направлении, противоположном первому направлению, например, против часовой стрелки. В свою очередь, пусковой привод 226, соединительный элемент 228 и пусковой ствол 230 могут втягиваться проксимально в ответ на втягивание второго осевого привода 28, что может вызвать втягивание двутаврового элемента 262 в базовое положение.
Как показано главным образом на ФИГ. 13, силовой модуль 10 может быть встроен в рукоятку 203 хирургического инструмента 200. Например, как показано на ФИГ. 13, силовой модуль 10 может быть расположен в корпусном участке 207 рукоятки 203 вдоль продольной оси LL. В некоторых примерах, как показано на ФИГ. 13, исполнительный механизм 96 может быть функционально соединен с вращательной ручкой 234, которую оператор может вращать для вращения исполнительного механизма 96 и, в свою очередь, перемещения трансмиссионного элемента 76 между первым положением, нейтральным положением и вторым положением, как описано выше. Кроме того, аккумуляторная батарея 236 (или «источник питания», или «блок батарей»), такая как, например, литий-ионная аккумуляторная батарея, может находиться на участке 238 пистолетной рукоятки 203, смежной с двигателем 14, причем аккумуляторная батарея может подавать электропитание на двигатель 14 посредством цепи 240 управления (см. ФИГ. 14). В соответствии с различными вариантами осуществления, в качестве источника питания для подачи электропитания на двигатель 14 можно применять несколько последовательно соединенных элементов аккумуляторных батарей. Кроме того, источник питания может быть сменным и/или перезаряжаемым. В других вариантах осуществления источник питания может содержать источник переменного тока, имеющийся в операционной.
Как показано на ФИГ. 14, цепь 240 управления может содержать микроконтроллер 242, который может по существу содержать память 244 и микропроцессор 246 («процессор»). Процессор 246 может быть функционально соединен с драйвером 248 двигателя, который может быть выполнен с возможностью управления положением, направлением вращения и скоростью двигателя 14. Кроме того, цепь 240 управления может быть функционально соединена с различными датчиками, которые могут, например, обнаруживать положение первого вращательного привода 22, первого осевого привода 24, второго вращательного привода 26, второго осевого привода 28, двутаврового элемента 262, гильзы 208, трансмиссионного элемента 76 и/или упора 256. Обнаруженное(-ые) положение(-я) может(-гут) передаваться на процессор 246. См., например, заявку на патент США № 13/803,130 под названием «КОНСТРУКЦИИ С АВТОРЕГУЛИРОВКОЙ ПРИВОДА ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», поданную 14 марта 2013 г., полное описание которой включено в настоящий документ путем ссылки.
В некоторых ситуациях микроконтроллер 242 может представлять собой, например, LM 4F230H5QR производства компании Texas Instruments. В одном варианте осуществления Texas Instruments LM4F230H5QR представляет собой процессорное ядро ARM Cortex-M4F, содержащее однотактную флеш-память на кристалле 7006 объемом 256 Кб или другую энергонезависимую память с частотой максимум 40 МГц, буфер предвыборки для повышения производительности выше 40 МГц, однотактную последовательную память с произвольным доступом (SRAM) объемом 32 Кб, внутреннее постоянное запоминающее устройство (ПЗУ) с загруженным программным обеспечением StellarisWare, электрически стираемую программируемую постоянную память (ЭСППЗУ) объемом 2 Кб, два модуля широтно-импульсной модуляции (ШИМ) с 16 усовершенствованными ШИМ-выходами для движения и подачи питания, два аналога импульсных датчиков положения (QEI), два 12-битных аналогово-цифровых преобразователя (АЦП) с 12 аналоговыми входными каналами, помимо других элементов, информацию о которых можно получить из паспорта изделия. В качестве замены в цепи 240 управления могут применяться другие микроконтроллеры. Соответственно, настоящее описание не должно быть ограничено в этом контексте.
В некоторых ситуациях драйвер 248 может представлять собой А3941 производства компании Allegro Microsystems, Inc. Драйвер A3941 248 может представлять собой полномостовой контроллер для применения с внешними N-канальными металлооксидными полупроводниковыми полевыми транзисторами (MOSFET), специально выполненными с возможностью обеспечивать индуктивные нагрузки, такие как щеточные двигатели постоянного тока. Драйвер 248 содержит уникальный регулятор накачки заряда, который обеспечивает полный (>10 В) привод вентиля для снижения напряжения аккумуляторной батареи до 7 В, а также позволяет A3941 работать со сниженным до 5,5 В приводом вентиля. Для обеспечения напряжения сверх возможностей аккумуляторной батареи, необходимого для N-канальных транзисторов MOSFET, может использоваться форсирующий конденсатор. Внутренний генератор накачки заряда для привода верхнего плеча может обеспечивать работу с постоянным током (100% загрузка). Полномостовая схема может быть приведена в действие в режиме с быстрым или медленным затуханием с применением диодного или синхронного выпрямления. В режиме с медленным затуханием обратная циркуляция тока может осуществляться в полевых транзисторах (FET) верхнего или нижнего плеча. Силовые FET защищены от пробоя с помощью регулируемой резистором бестоковой паузы. Встроенные средства диагностики обеспечивают указание на недостаточное напряжение, перегрев и сбой силового моста и могут быть выполнены с возможностью защищать силовые транзисторы MOSFET от большинства состояний короткого замыкания. В качестве замены цепи 240 управления приводом могут применяться другие драйверы двигателя. Соответственно, настоящее описание не должно быть ограничено в этом контексте.
В некоторых ситуациях полярность напряжения, обеспечиваемая аккумуляторной батареей 236, позволяет электрическому двигателю 14 работать в направлении по часовой стрелке, причем полярность напряжения, приложенная к электрическому двигателю 14 аккумуляторной батареей 236, может быть изменена на обратную для работы электрического двигателя 14 в направлении против часовой стрелки. Направление вращения двигателя 14 может определять направление осевого движения первого осевого привода 24, когда трансмиссионный элемент 76 соединен с первым вращательным приводом 22, и может определять направление осевого движения второго осевого привода 28, когда трансмиссионный элемент 76 соединен со вторым вращательным приводом 24.
Как показано на ФИГ. 13 и 14, спусковой механизм 214 может быть выполнен с возможностью перемещения между неактивированным положением и активированным положением. Кроме того, спусковой механизм 214 может быть функционально соединен с переключателем 270, который может иметь электрическое соединение с микроконтроллером 242 посредством электронной цепи 272, как показано на ФИГ. 14. Переключатель 270 может переключаться, размыкая и замыкая цепь 272 при перемещении спускового механизма 214 между активированным и неактивированным положениями. Например, переключатель 270 может быть механически связан со спусковым механизмом 214 так, что переключатель 270 замыкает цепь 272, когда спусковой механизм 214 находится в активированном положении, и размыкает цепь 272, когда спусковой механизм 214 находится в неактивированном положении. В любом случае замыкание или размыкание цепи 272 может подавать микроконтроллеру 242 сигнал на активацию двигателя 14 с целью закрывания или открывания концевого эффектора 202, как описано выше.
В некоторых ситуациях спусковой механизм 214 может смещаться в неактивированное положение посредством смещающего элемента (не показан). В процессе применения оператор хирургического инструмента 200 может поворачивать ручку 234 и перемещать трансмиссионный элемент 76 из нейтрального положения в первое положение, вводя его в соединение с первым вращательным приводом 22. Далее оператор может активировать спусковой механизм 214, заставляя микроконтроллер 242, например, путем переключения переключателя 270, замкнуть цепь 272 и активировать двигатель 14 для закрывания концевого эффектора 202. При высвобождении спускового механизма 214 смещающее воздействие смещающего элемента может вернуть спусковой механизм 214 в неактивированное положение, таким образом переключая переключатель 270 для размыкания цепи 272. Вторая активация оператором спускового механизма 214 может заставить микроконтроллер 242 активировать двигатель 14 для вращения во втором направлении, противоположном первому направлению, например, против часовой стрелки, для открывания концевого эффектора 202.
Как и в других формах, описанных в настоящем документе, хирургический инструмент 200 также может включать в себя датчики, выполненные с возможностью обнаружения положения первого осевого привода 24, направления перемещения первого осевого привода 24, положения второго осевого привода 28 и/или направления перемещения второго осевого привода 28. Кроме того, хирургический инструмент 200 также может включать в себя датчики, выполненные с возможностью обнаружения положения трансмиссионного элемента 76. Вся подобная информация может быть передана на процессор 246 и может быть сохранена в памяти 244.
В дополнение к указанному выше оператор может повторять открывание и закрывание концевого эффектора 202, как описано выше, пока нужная ткань не будет захвачена между упором 256 и кассетой 250. Далее оператор может повернуть ручку 234 и переместить трансмиссионный элемент 76 во второе положение, вводя его в соединение со вторым вращательным приводом 26. При активации спускового механизма 214 процессор 246 может проверить сохраненные в памяти 244 положения первого осевого привода 24, второго осевого привода 28 и трансмиссионного элемента 76 и определить, что концевой эффектор закрыт и что трансмиссионный элемент 76 находится во втором положении. Таким образом, микроконтроллер 242 может активировать вращение двигателя 14 в первом направлении, например, в направлении по часовой стрелке, чтобы выдвинуть двутавровый элемент 262 с целью скрепления и разрезания захваченной ткани, как описано выше. При второй активации спускового механизма 214 микроконтроллер 242 может активировать вращение двигателя 14 во втором направлении, противоположном первому направлению, например, в направлении против часовой стрелки, для втягивания двутаврового элемента 262 в базовое положение. Чтобы освободить скрепленную ткань, оператор может активировать спусковой механизм 214 для открывания концевого эффектора 202. При получении сигнала от цепи 272, как описано выше, микроконтроллер 242 может проверить сохраненные в памяти 244 положения первого осевого привода 24, второго осевого привода 28 и трансмиссионного элемента 76. В ответ микроконтроллер 242 может активировать двигатель 14 и открыть концевой эффектор 202, как описано выше.
На ФИГ. 15 и 16 представлена рукоятка 203’. Рукоятка 203’ аналогична рукоятке 203 во многих отношениях и выполнена с возможностью применения с хирургическим инструментом, таким как, например, хирургический инструмент 200, аналогично рукоятке 203. Кроме того, рукоятка 203’ включает в себя силовой модуль 10’, который во многих отношениях аналогичен силовому модулю 10. Однако силовой модуль 10’ может быть соединен с возможностью отсоединения с рукояткой 203’. Таким образом, силовой модуль 10’ можно применять со множеством хирургических инструментов. Например, при завершении хирургического вмешательства оператор может отсоединить силовой модуль 10’ от рукоятки 203’ хирургического инструмента 200, который может быть надлежащим образом утилизирован. Далее силовой модуль 10’ можно, например, повторно стерилизовать и применить с новым хирургическим инструментом 200, вставив силовой модуль 10’ в рукоятку 203’ нового хирургического инструмента 200.
Как показано на ФИГ. 15, силовой модуль 10 может быть соединен с возможностью отсоединения с рукояткой 203’. Например, первый осевой привод 22 может быть соединен с возможностью отсоединения с пусковым приводом 226, а второй осевой привод 28 может быть соединен с возможностью отсоединения с элементом-кареткой 224. Например, как показано на ФИГ. 16, соединения типа «ласточкин хвост» 274 и 276 могут соединять с возможностью отсоединения первый осевой привод 22 с проксимальным участком элемента-каретки 224 и второй осевой привод 28 с проксимальным участком пускового привода 226 соответственно. Кроме того, исполнительный механизм 96 может предусматривать защелкивающееся соединение с ручкой 234. Кроме того, двигатель 14 силового модуля 10’ и драйвер 248 могут быть соединены друг с другом с возможностью отсоединения посредством соответствующих электрических контактов, обеспечивающих формирование между ними электропроводящего пути. Кроме того, рукоятка 203’ может быть выполнена с возможностью включения в нее отсоединяемого внешнего кожуха, который может сниматься, давая возможность вводить и выводить силовой модуль, например, силовой модуль 10’, в функциональное взаимодействие с рукояткой 203’.
В некоторых примерах силовой модуль для применения с хирургическим инструментом включает в себя концевой эффектор, причем силовой модуль содержит первый узел преобразования перемещений, который содержит первый вращательный привод и первый осевой привод, функционально соединенный с первым вращательным приводом. Силовой модуль дополнительно содержит второй узел преобразования перемещений, содержащий второй вращательный привод и второй осевой привод, функционально соединенный со вторым вращательным приводом. Силовой модуль дополнительно содержит двигатель, выполненный с возможностью генерации, по меньшей мере, одного вращательного движения для активации концевого эффектора, и трансмиссионный узел, выполненный с возможностью избирательного взаимодействия двигателя с первым вращательным приводом и вторым вращательным приводом, причем двигатель расположен концентрически с первым вращательным приводом и вторым вращательным приводом.
В некоторых примерах силовой модуль для применения с хирургическим инструментом включает в себя концевой эффектор, причем силовой модуль содержит первый узел преобразования перемещений, который содержит первый вращательный привод и первый осевой привод, функционально соединенный с первым вращательным приводом. Силовой модуль дополнительно содержит второй узел преобразования перемещений, содержащий второй вращательный привод и второй осевой привод, функционально соединенный со вторым вращательным приводом. Силовой модуль дополнительно содержит двигатель, выполненный с возможностью генерации, по меньшей мере, одного вращательного движения для активации концевого эффектора, причем двигатель образует ось активации, и трансмиссионный узел, выполненный с возможностью избирательного функционального соединения двигателя с первым вращательным приводом и вторым вращательным приводом, при этом первый вращательный привод выполнен с возможностью вращения вокруг оси активации в ответ на, по меньшей мере, одно вращательное движение, когда двигатель функционально соединен с первым вращательным приводом, при этом второй вращательный привод выполнен с возможностью вращения вокруг оси активации в ответ на, по меньшей мере, одно вращательное движение, когда двигатель функционально соединен со вторым вращательным приводом.
В некоторых примерах хирургический инструмент содержит ствол, корпус, проходящий проксимально от ствола, концевой эффектор, проходящий дистально от ствола, и силовой модуль, по меньшей мере, частично расположенный в пределах корпуса. Силовой модуль содержит первый вращательный привод, второй вращательный привод, двигатель, выполненный с возможностью генерации, по меньшей мере, одного вращательного движения, причем двигатель образует ось активации, и трансмиссионный узел, выполненный с возможностью избирательного функционального соединения двигателя с первым вращательным приводом и вторым вращательным приводом, при этом первый вращательный привод выполнен с возможностью вращения вокруг оси активации в ответ на, по меньшей мере, одно вращательное движение, когда двигатель функционально соединен с первым вращательным приводом, при этом второй вращательный привод выполнен с возможностью вращения вокруг оси активации в ответ на, по меньшей мере, одно вращательное движение, когда двигатель функционально соединен со вторым вращательным приводом, при этом двигатель проходит вдоль оси активации.
Следует понимать, что компактная конструкция силовых модулей, описанных в настоящем документе, таких как, например, силовой модуль 10, может быть преимущественной для применения в хирургических условиях. Эти силовые модули могут быть источником множества возвратно-поступательных осевых движений, которые могут служить разным функциям хирургического инструмента, такого как, например, хирургический инструмент 200. Кроме того, силовые модули, описанные в настоящем документе, такие как, например, силовой модуль 10’, могут обладать дополнительным преимуществом пригодности для применения со множеством хирургических инструментов. Возможность извлекать, повторно стерилизовать и повторно применять силовой модуль 10’ может обеспечивать преимущество экономии затрат.
Любой патент, публикация или другой материал описания, полностью или частично, который указан как включенный в настоящий документ путем ссылки, включен в настоящий документ только в той степени, в которой включенный материал не противоречит существующим определениям, положениям и другому материалу описания, представленным в настоящем описании. Таким образом, в необходимой степени описание, как явно представлено в настоящем документе, имеет преимущество перед любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, который указан как включенный в настоящий документ путем ссылки, но который противоречит существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включен только в той степени, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Хотя настоящее изобретение описано как имеющее примеры конфигураций, настоящее изобретение можно дополнительно модифицировать в пределах сущности и объема описания. Следовательно, предполагается, что настоящая заявка охватывает все возможные вариации, способы применения или адаптации изобретения с применением его общих принципов. Кроме того, предполагается, что настоящая заявка охватывает такие отклонения от настоящего описания, которые подпадают под известную или общепринятую практику в области, к которой относится настоящее изобретение.
Реферат
Группа изобретений относится к медицинской технике, а именно к силовому модулю для применения с хирургическими режущими и сшивающими инструментами с электропитанием. Силовой модуль для применения с хирургическим инструментом включает в себя концевой эффектор, причем силовой модуль содержит первый узел преобразования перемещений, второй узел преобразования перемещений, двигатель и трансмиссионный узел. Первый узел преобразования перемещений содержит первый вращательный привод и первый осевой привод, функционально связанный с первым вращательным приводом. Второй узел преобразования перемещений содержит второй вращательный привод и второй осевой привод, функционально связанный со вторым вращательным приводом. Двигатель выполнен с возможностью выработки по меньшей мере одного вращательного перемещения для приведения в действие концевого эффектора, причем двигатель образует продольную ось. Трансмиссионный узел выполнен с возможностью обеспечения избирательного взаимодействия двигателя с первым вращательным приводом и вторым вращательным приводом. Первый вращательный привод выполнен с возможностью вращения вокруг продольной оси в ответ на по меньшей мере одно вращательное перемещение при взаимодействии двигателя с первым вращательным приводом. Второй вращательный привод выполнен с возможностью вращения вокруг продольной оси в ответ на по меньшей мере одно вращательное перемещение при взаимодействии двигателя со вторым вращательным приводом. Двигатель расположен концентрически с первым вращательным приводом и вторым вращательным приводом. Во втором варианте выполнения силовой модуль содержит вышеуказанные первый узел преобразования перемещений, второй узел преобразования перемещений, двигатель и трансмиссионный узел. Трансмиссионный узел выполнен с возможностью избирательного функционального соединения двигателя с первым вращательным приводом и вторым вращательным приводом. Первый вращательный привод выполнен с возможностью вращения вокруг продольной оси в ответ на по меньшей мере одно вращательное перемещение при функциональном соединении двигателя с первым вращательным приводом. Второй вращательный привод выполнен с возможностью вращения вокруг продольной оси в ответ на по меньшей мере одно вращательное перемещение при функциональном соединении двигателя со вторым вращательным приводом. Хирургический инструмент содержит ствол, корпус, проходящий проксимально от ствола, концевой эффектор, проходящий дистально от ствола, и вышеупомянутый силовой модуль, по меньшей мере частично расположенный в пределах корпуса. Использование группы изобретений характеризуется уменьшением размера силового модуля. 3 н. и 14 з.п. ф-лы, 16 ил.
Комментарии