Элементы управления для шарнирного хирургического устройства - RU2571602C2
Код документа: RU2571602C2
Чертежи



















Описание
ПРИОРИТЕТЫ
Данная заявка истребует приоритет по предварительной заявке на патент США с серийным номером 61/386094, поданной 24 сентября 2010 года, озаглавленной «Шарнирное хирургическое устройство» и включенной в настоящую заявку посредством ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Тканережущие элементы входят в состав различных хирургических инструментов наряду с одним или несколькими элементами, передающими РЧ энергию в ткани (например, для коагуляции или скрепления ткани). Примером такого устройства является устройство для скрепления тканей ENSEAL® производства компании Этикон Эно-Серджери, Инк, Цинциннати, штат Огайо. Другие примеры таких устройств и связанные с ними понятия приводятся в патенте США номер 6500176, озаглавленном «Электрохирургические системы и методы скрепления тканей», выданном 31 декабря 2002 г. и включенном в настоящую заявку посредством ссылки; патенте США номер 7112201, озаглавленном «Электрохирургический инструмент и способ применения», выданном 26 сентября 2006 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7125409, озаглавленном «Электрохирургический рабочий наконечник для контролируемой доставки энергии», выданном 24 октября 2006 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7169146, озаглавленном «Электрохирургический зонд и способ применения», выданном 30 января 2007 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7186253, озаглавленном «Электрохирургический зажим для контролируемой доставки энергии», выданном 6 марта 2007 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7189233, озаглавленном «Электрохирургический инструмент», выданном 13 марта 2007 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7220951, озаглавленном «Хирургические скрепляющие поверхности и способы применения», выданном 22 мая 2007 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7309849, озаглавленном «Полимерные составы с положительным температурным коэффициентом и способы изготовления», выданном 18 декабря 2007 г., включенном в настоящую заявку посредством ссылки; патенте США номер 7311709, озаглавленном «Электрохирургический инструмент и способ применения», выданном 25 декабря 2007 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7354440, озаглавленном «Электрохирургический инструмент и способ применения», выданном 8 апреля 2008 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7381209, озаглавленном «Электрохирургический инструмент», выданном 3 июня 2008 года, включенном в настоящую заявку посредством ссылки; публикации США номер 2011/0087218, озаглавленной «Хирургический инструмент, состоящий из первой и второй приводных систем, запускаемых общим спусковым механизмом», опубликованной 14 апреля 2011 года, включенной в настоящую заявку посредством ссылки; и заявки на патент США номер 13/151181, озаглавленной «Электрохирургическое устройство с мотором, с механической и электрической обратной связью», поданной 2 июня 2011 года, включенной в настоящую заявку посредством ссылки.
Кроме того, различные хирургические инструменты включают в себя стержни с шарнирной секцией и обладают расширенными возможностями для позиционирования рабочего концевого эффектора, расположенного на противоположном конце от шарнирной части. К примерам таких устройств относятся различные модели эндоскопических резцов ENDOPATH® производства компании Этикон Эно-Серджери, Инк, Цинциннати, штат Огайо, США. Примеры таких устройств и связанные с ними понятия также описаны в патенте США номер 7380696, озаглавленном «Шарнирный хирургический сшивающий аппарат со спусковым механизмом на E-образном стержне из двух частей», выданном 3 июня 2008 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7404508, озаглавленном «Хирургическое режуще-сшивающее устройство», выданном 29 июля 2008 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7455208, озаглавленном «Хирургический инструмент с шарнирным стержнем с жесткими опорами стержня спускового механизма», выданном 25 ноября 2008 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7506790, озаглавленном «Хирургический инструмент с шарнирным механизмом на электрическом приводе», опубликованном 24 марта 2009 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7549564, озаглавленном «Хирургический сшивающий аппарат с концевым эффектором на шарнирах», выданном 23 июня 2009 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7559450, озаглавленном «Хирургический инструмент с гидравлически управляемым шарнирным механизмом», опубликованном 14 июля 2009 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7654431, озаглавленном «Хирургический инструмент продольно контролируемым подвижным шарнирным элементом», выданном 2 февраля 2010 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7780054, озаглавленном «Хирургический инструмент с продольно перемещаемым приводом стержня, связанным с шарнирным сочленением», опубликованном 24 августа 2010 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7784662, озаглавленном «Хирургический инструмент с одним шарнирным соединением закрывающего механизма и двойным шарнирным соединением корпуса», выданном 31 августа 2010 года, включенном в настоящую заявку посредством ссылки; патенте США номер 7798386, озаглавленном «Крышка шарнирного сочленения хирургического инструмента», выданном 21 сентября 2010 года, включенном в настоящую заявку посредством ссылки.
При том, что был произведен и использовался ряд медицинских приборов, считается, что до изобретателей никто не производил и не использовал описанное в прилагаемой формуле изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Несмотря на то, что описание изобретения заканчивается формулой изобретения, которая подробно описывает данную технологию, полагают, что лучшему пониманию настоящей технологии послужит следующее описание нескольких примеров осуществления, приведенное в сочетании с прилагаемыми фигурами, на которых одинаковые номера позиций обозначают подобные элементы, и где:
на фиг. 1 изображен вид сбоку примера электрохирургического медицинского устройства;
на фиг. 2 изображен вид в перспективе концевого эффектора устройства с фиг. 1 в открытой конфигурации;
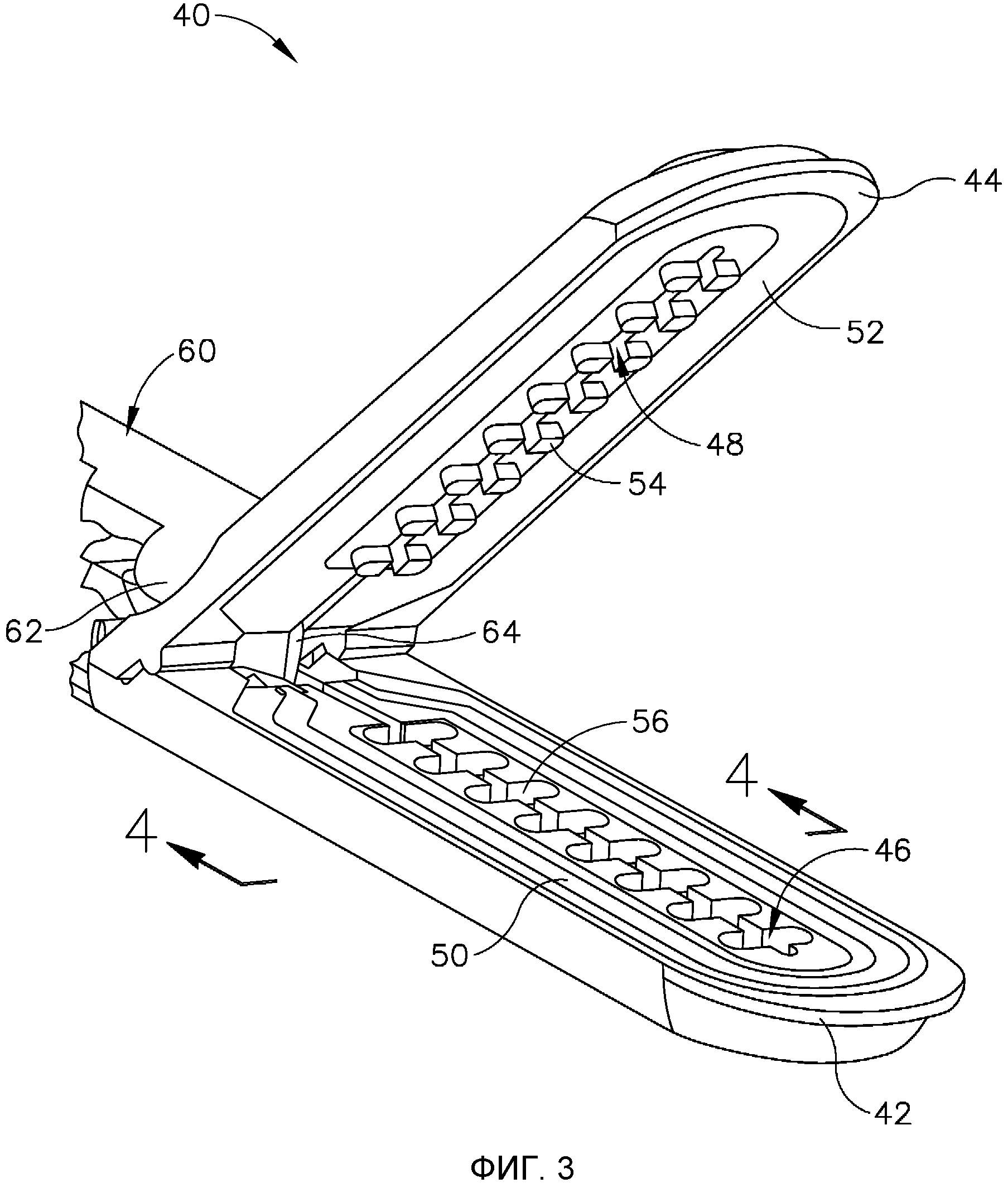
на фиг. 3 изображен альтернативный вид в перспективе концевого эффектора устройства с фиг. 1 в открытой конфигурации;
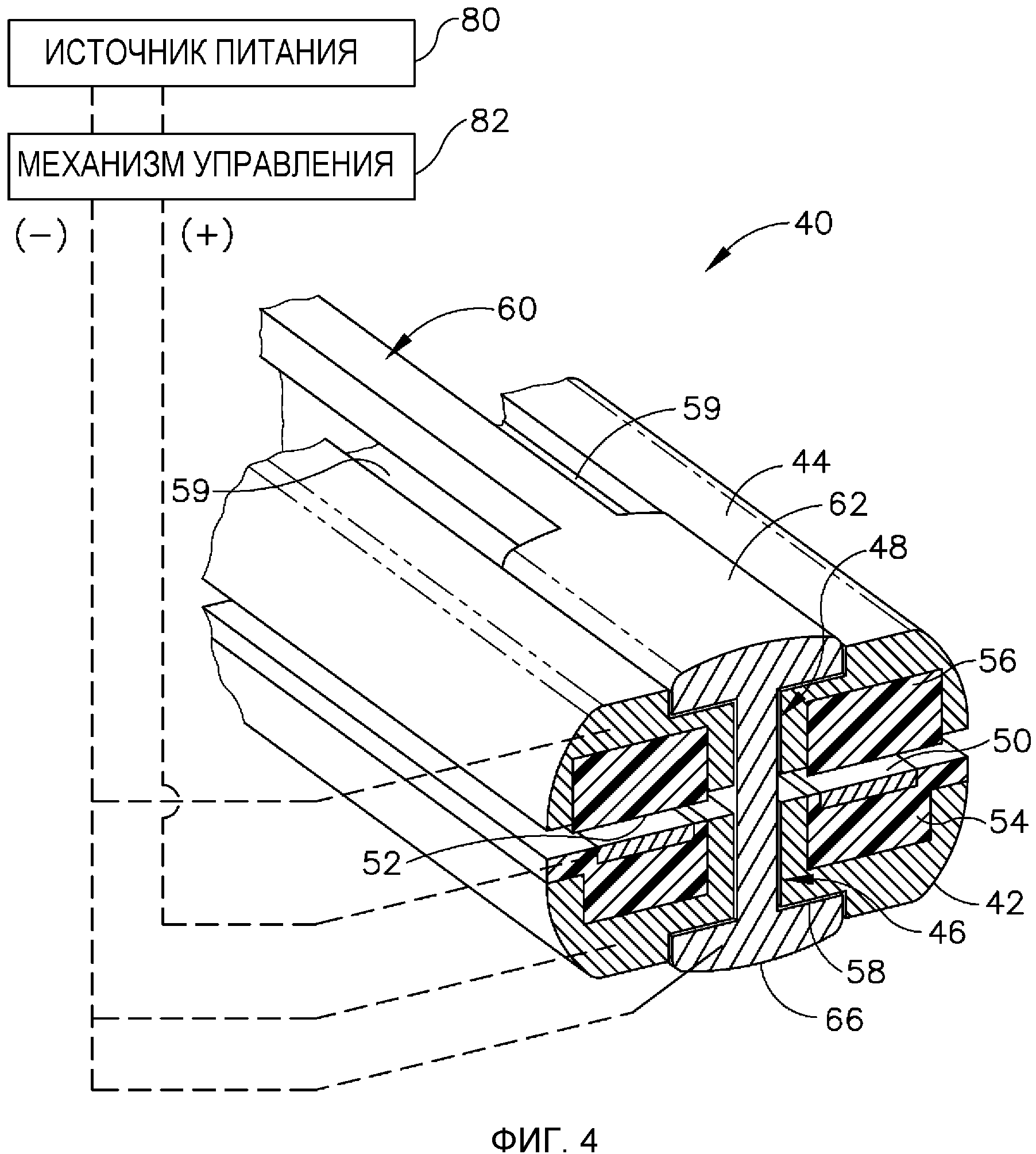
на фиг. 4 изображено поперечное сечение концевого эффектора с фиг. 2 в закрытой конфигурации, с лезвием в выдвинутом положении;
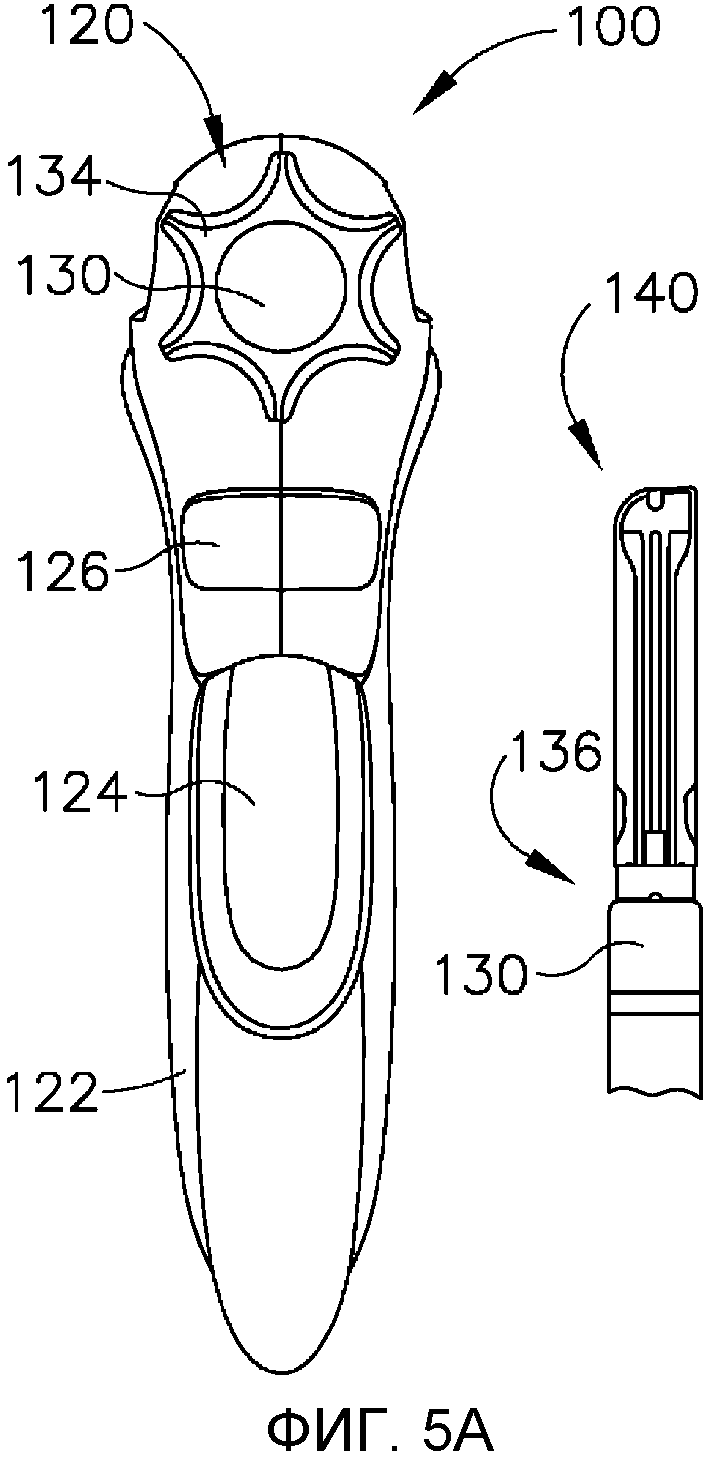
на фиг. 5А изображен вид с торца примера электрохирургического инструмента со спусковым крючком, поворачивающимся относительно продольной оси, в исходном положении и вид сверху концевого эффектора инструмента в прямом положении;
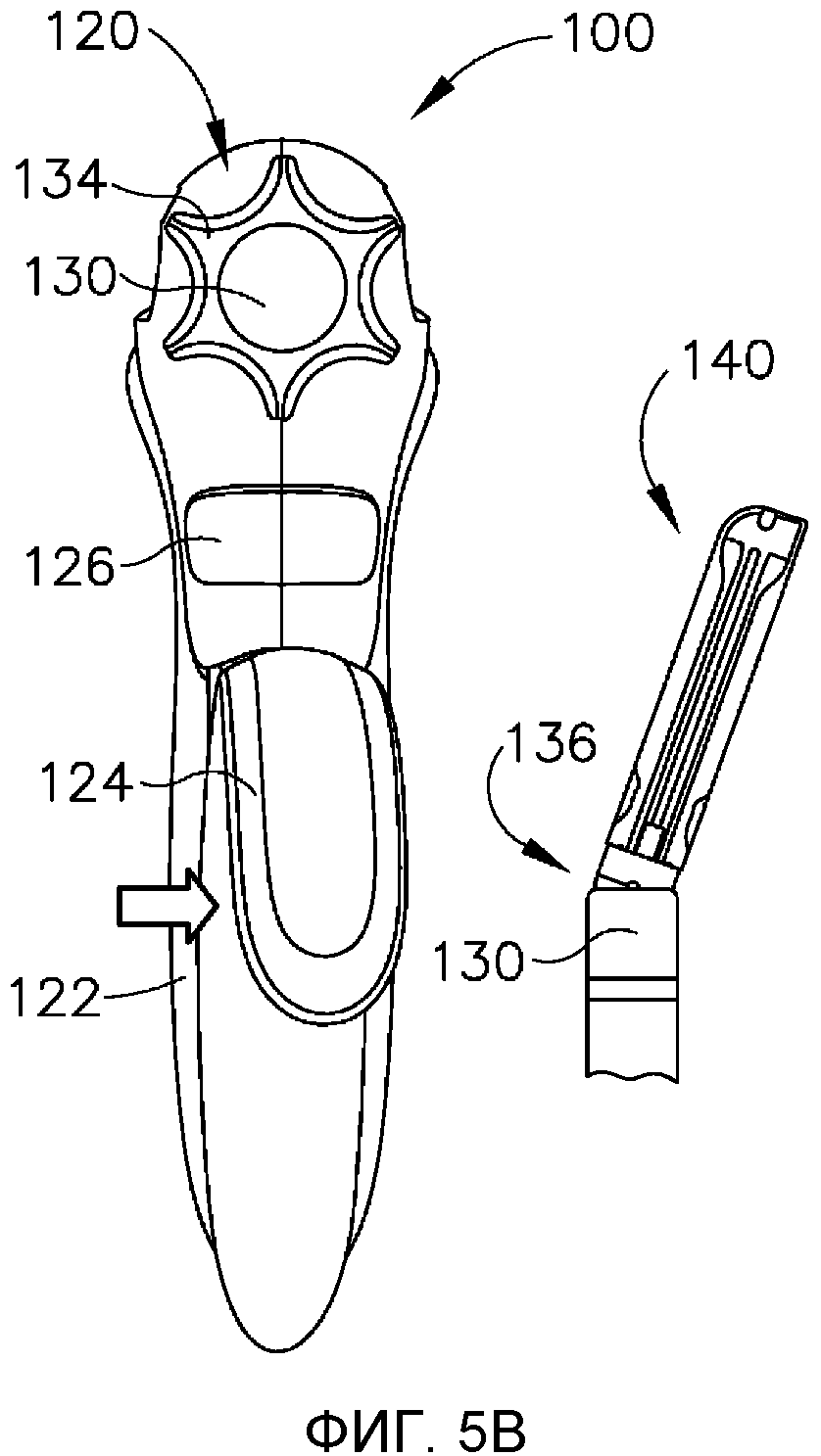
на фиг. 5B изображен вид с торца электрохирургического инструмента с фиг. 5А и вид сверху концевого эффектора с фиг. 5А, со спусковым крючком, поворачивающимся относительно продольной оси, в первом повернутом положении и концевым эффектором в первом согнутом положении;
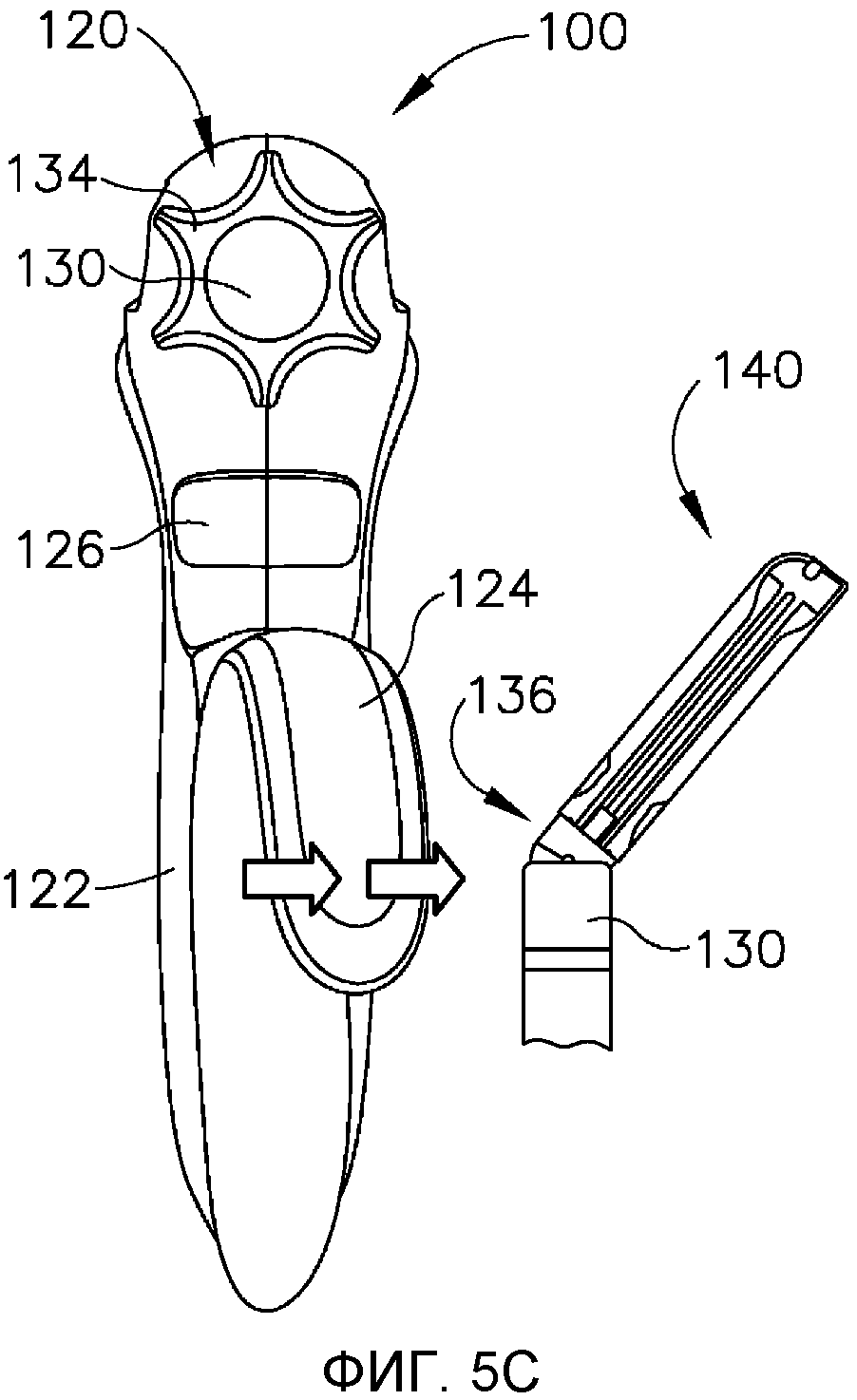
на фиг. 5C изображен вид с торца электрохирургического инструмента с фиг. 5А и вид сверху концевого эффектора с фиг. 5А, со спусковым крючком, поворачивающимся вокруг продольной оси, во втором повернутом положении и концевым эффектором во втором согнутом положении;
на фиг. 6 изображен частичный вид в перспективе шарнирной части и концевого эффектора другого примера электрохирургического инструмента;
на фиг. 7 изображен вид в перспективе в разрезе шарнирной части с фиг. 6;
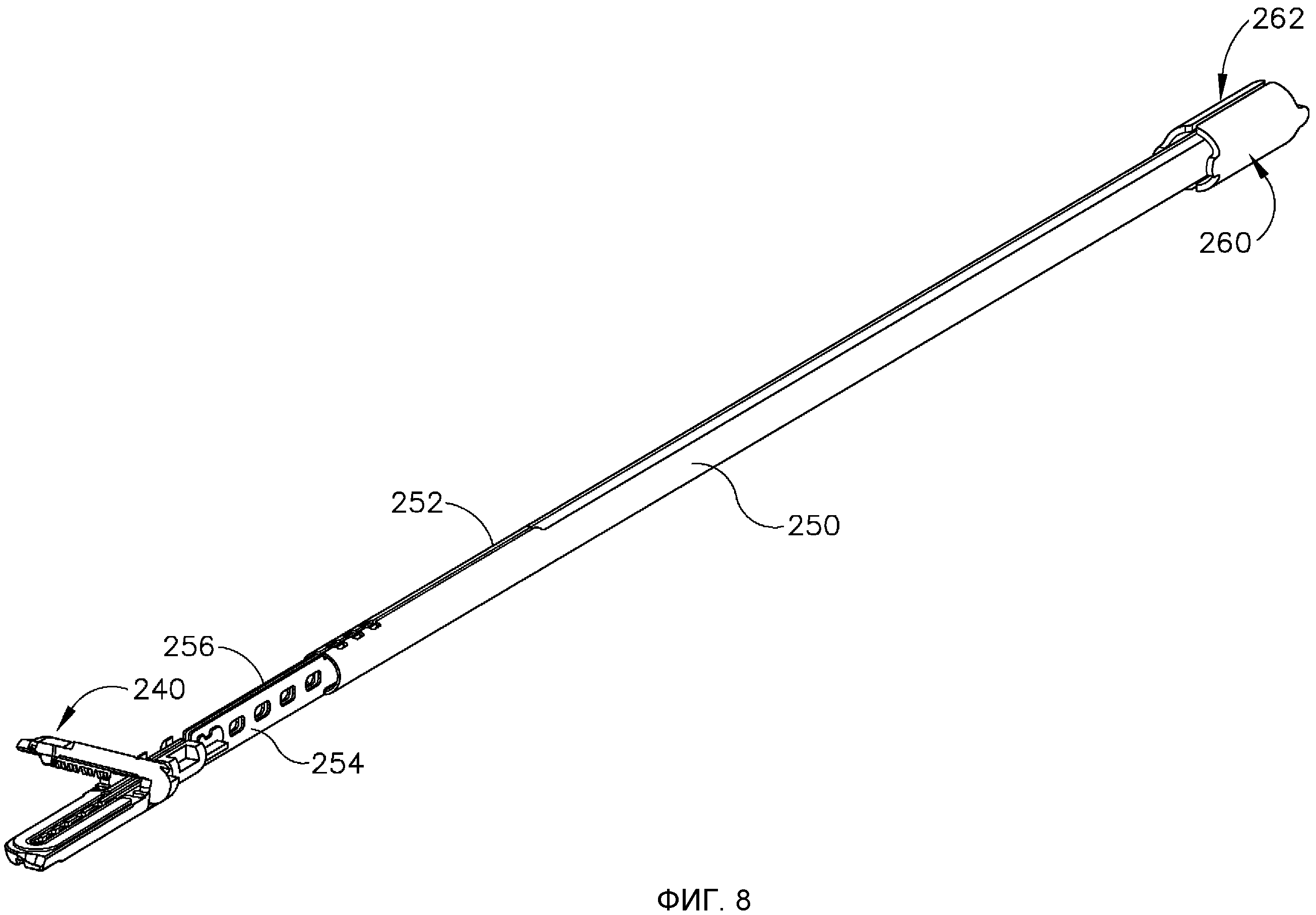
на фиг. 8 изображен вид в перспективе шарнирных элементов управления и режуще-сшивающего элемента, соединенного с концевым эффектором с фиг. 6;
на фиг. 9 изображен вид в перспективе проксимальной части шарнирных элементов управления с фиг. 8 без кулачковых элементов;
на фиг. 10 изображен вид в перспективе проксимальной части с фиг. 9 с кулачковыми элементами;
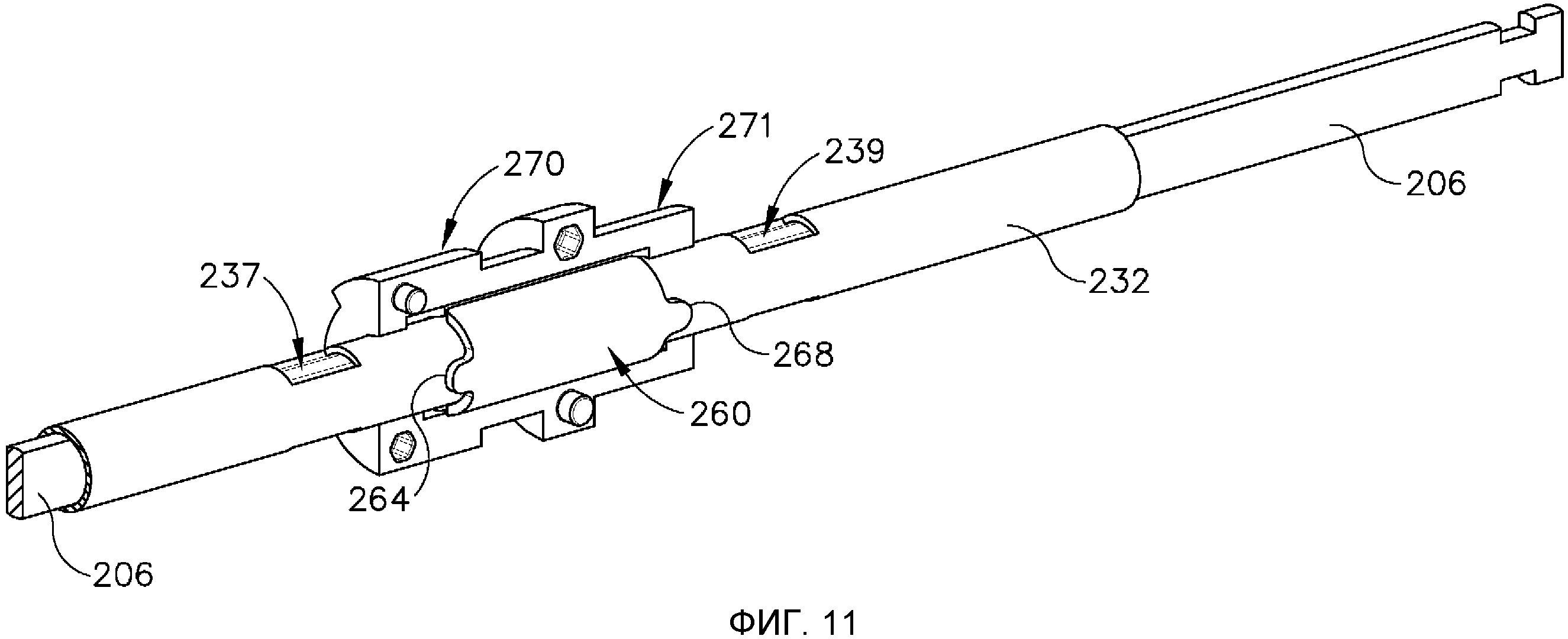
на фиг. 11 изображен вид в перспективе проксимальной части и с кулачковыми элементами с фиг. 10 и половиной приводной гайки;
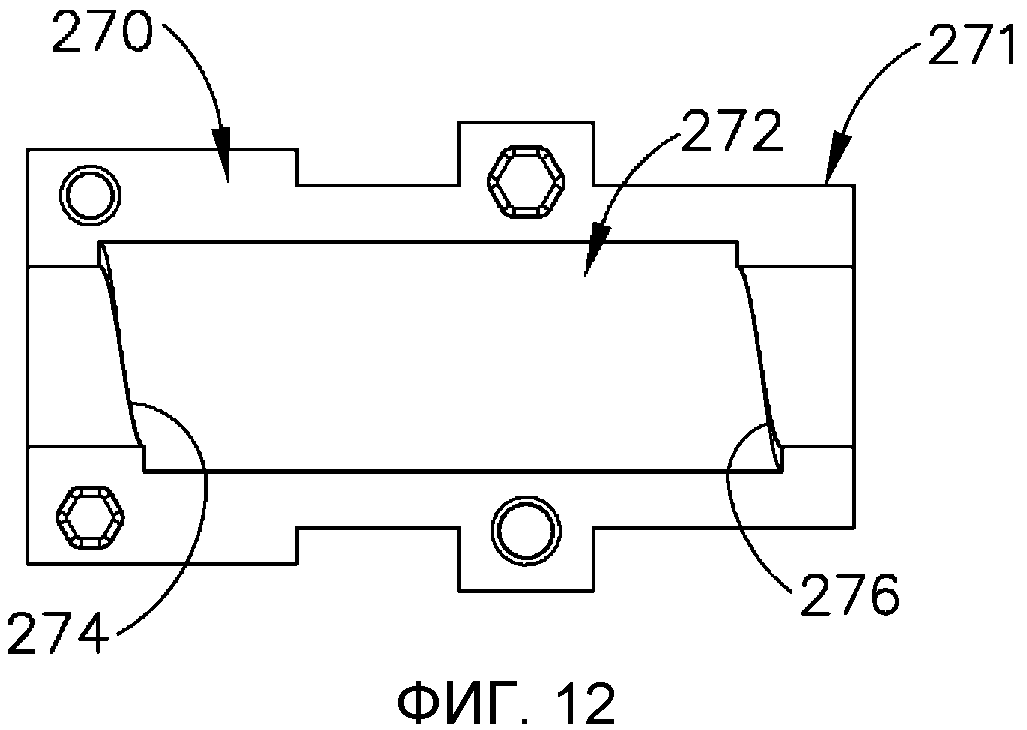
на фиг. 12 изображен вид сбоку половины приводной гайки с фиг. 11;
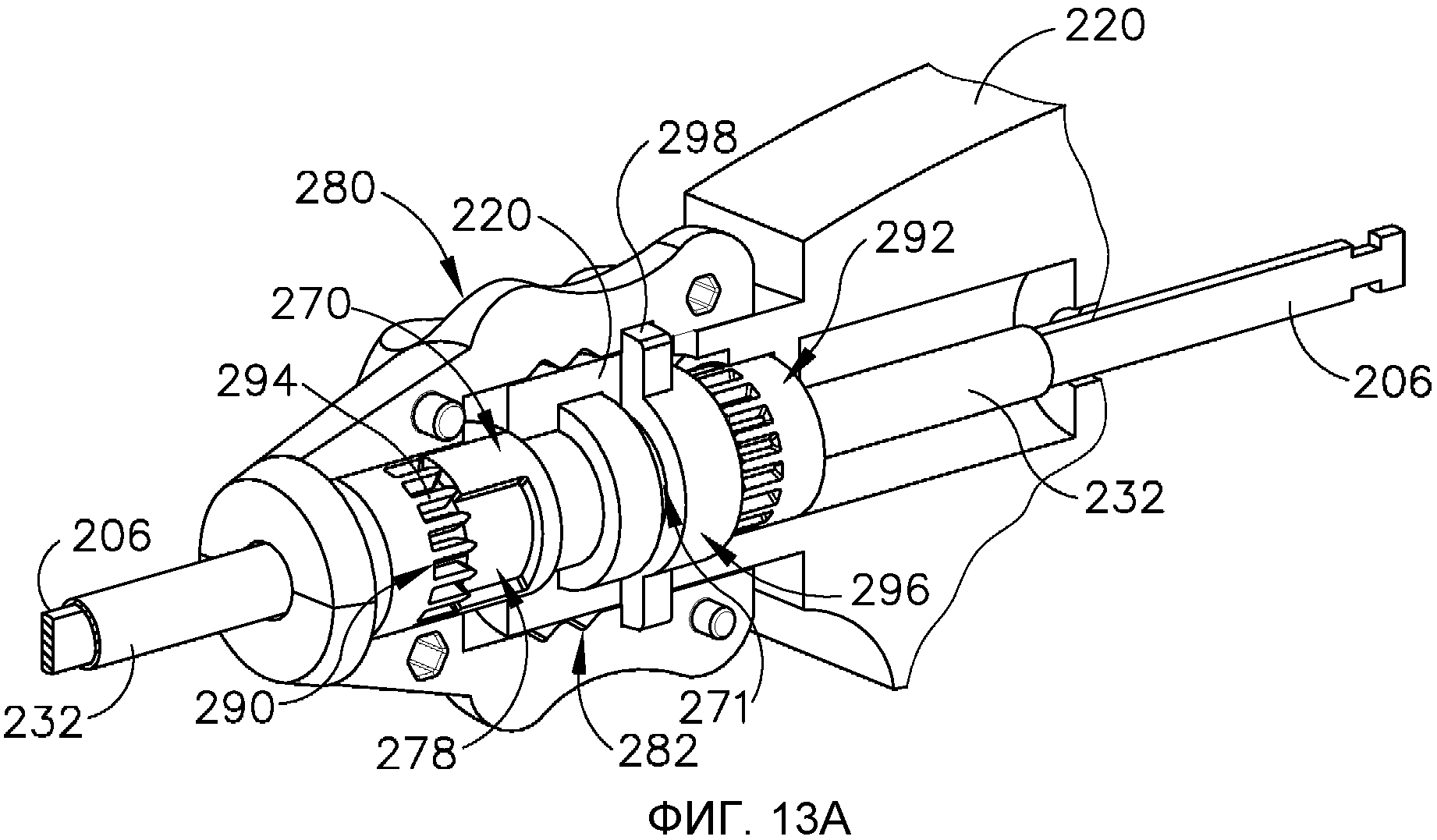
на фиг. 13А изображен частичный вид в перспективе расположенных в рукоятке шарнирных элементов управления с фиг. 11 с ротатором в дистальном положении;
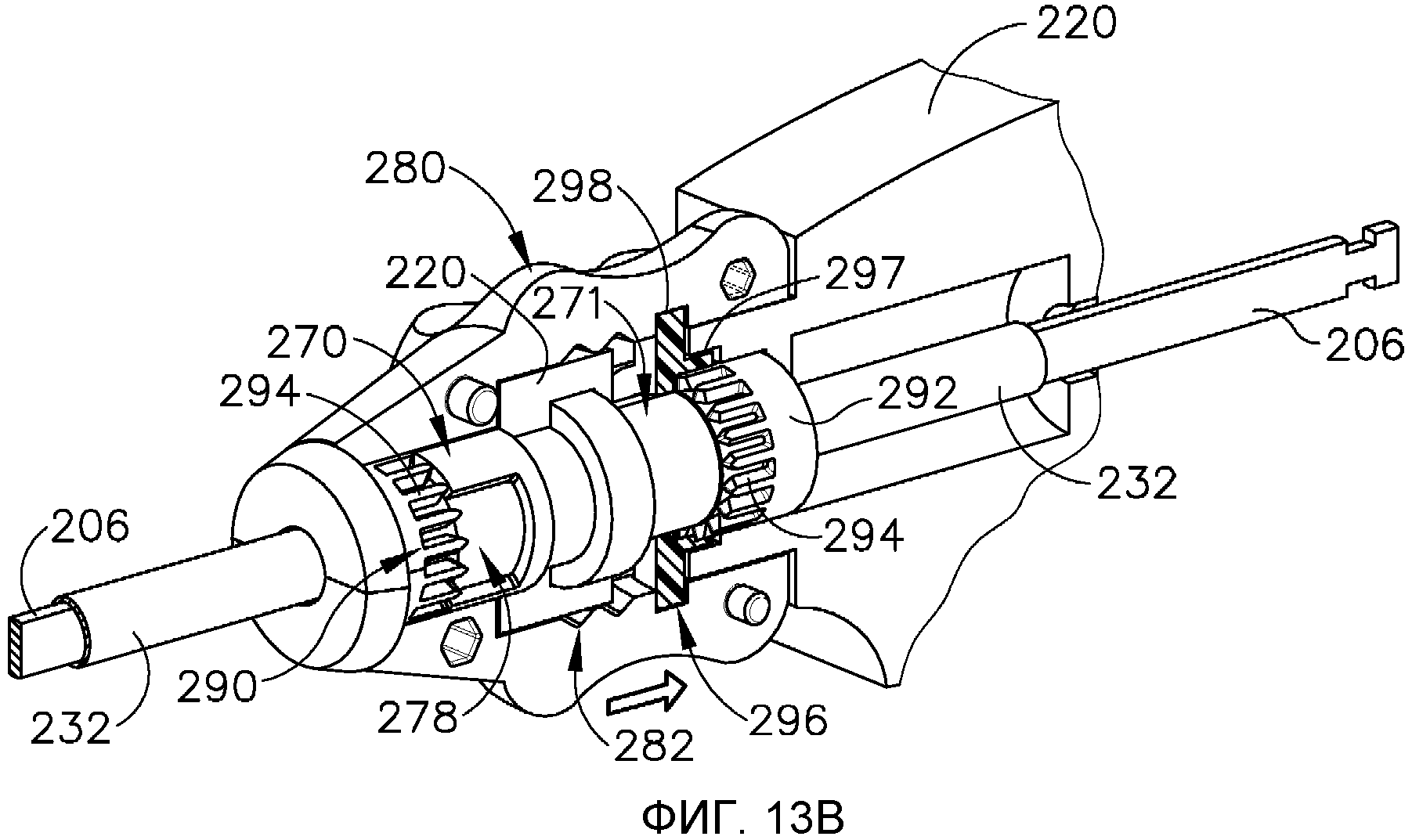
на фиг. 13B изображен частичный вид в перспективе компонентов фиг. 13А с ротатора в проксимальном положении;
на фиг. 14А изображен другой частичный вид в перспективе компонентов фиг. 13А с ротатором в частичном поперечном сечении и с ротатором в дистальном положении;
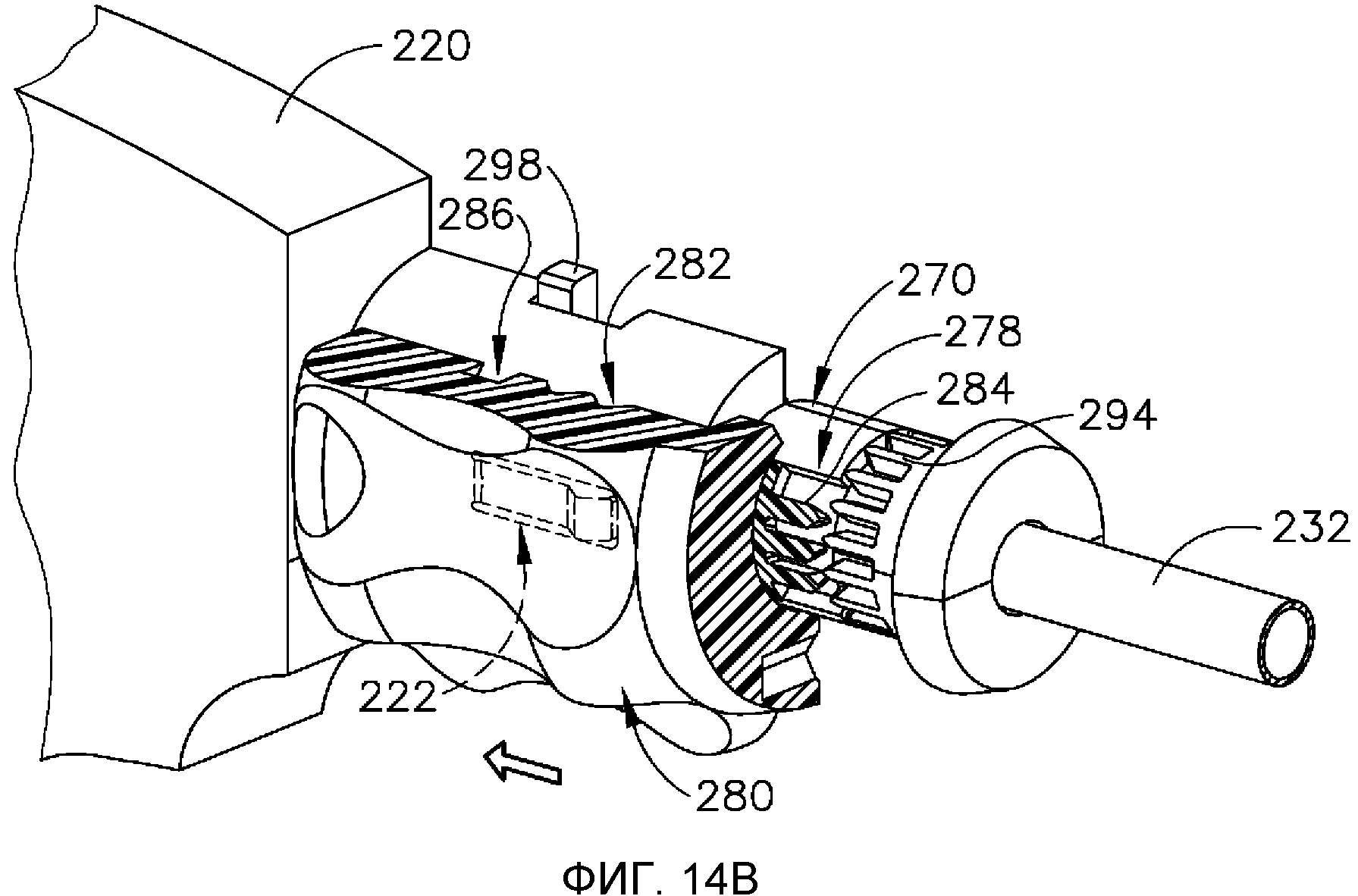
на фиг. 14B изображен другой частичный вид в перспективе компонентов фиг. 13А с ротатором в частичном поперечном сечении и с ротатором в проксимальном положении;
на фиг. 15 изображен вид в перспективе половины ротатора с фиг. 13А;
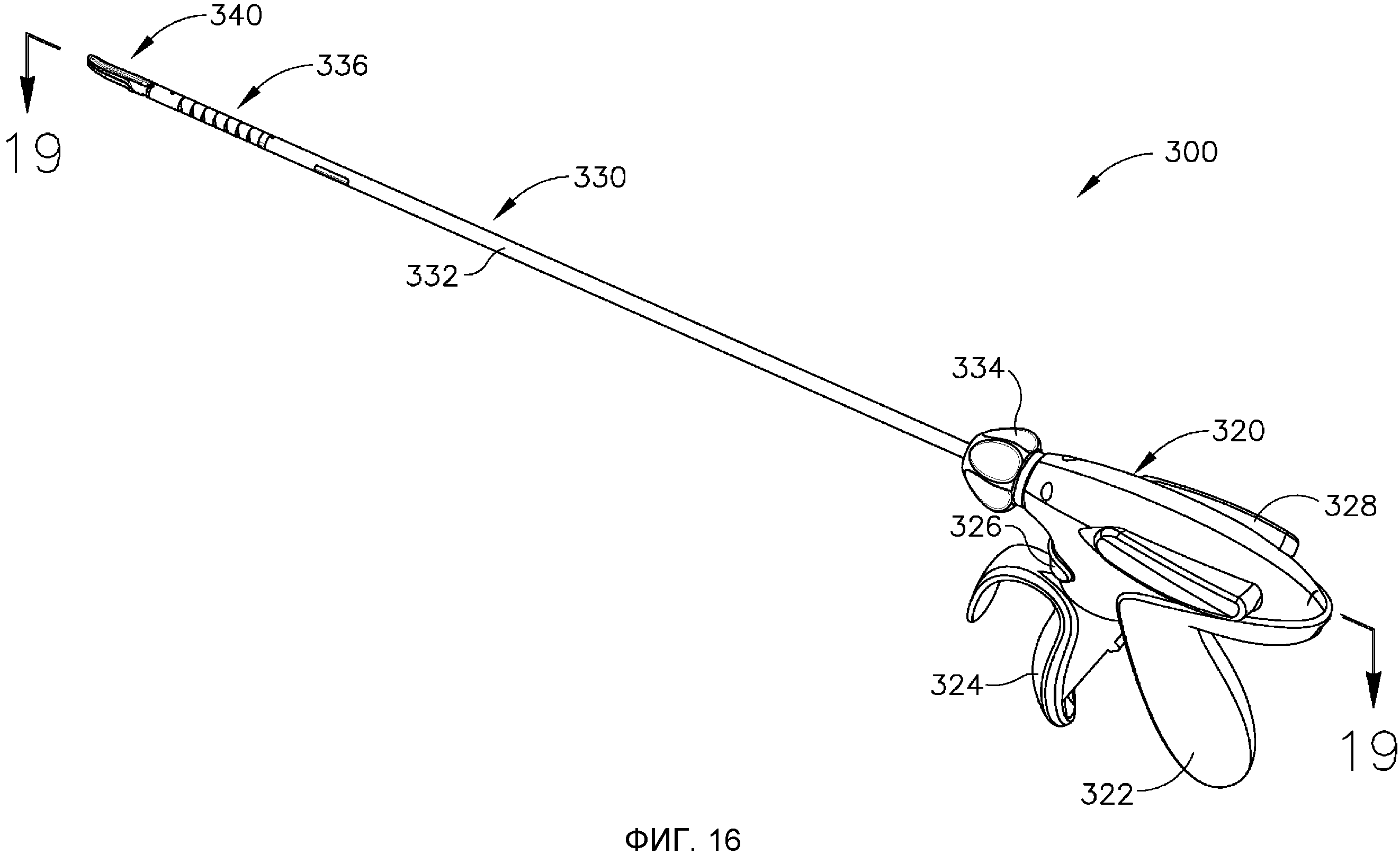
на фиг. 16 изображен вид в перспективе другого примера электрохирургического инструмента;
на фиг. 17 изображен частичный вид в перспективе нижней стороны шарнирных элементов управления инструмента с фиг. 16;
на фиг. 18 изображен вид сверху нижней стороны шарнирных элементов управления с фиг. 17;
на фиг. 19 изображен частичный вид в разрезе сочленения шарнирных элементов управления с фиг. 17, выполненный вдоль линии 19-19 с фиг. 16;
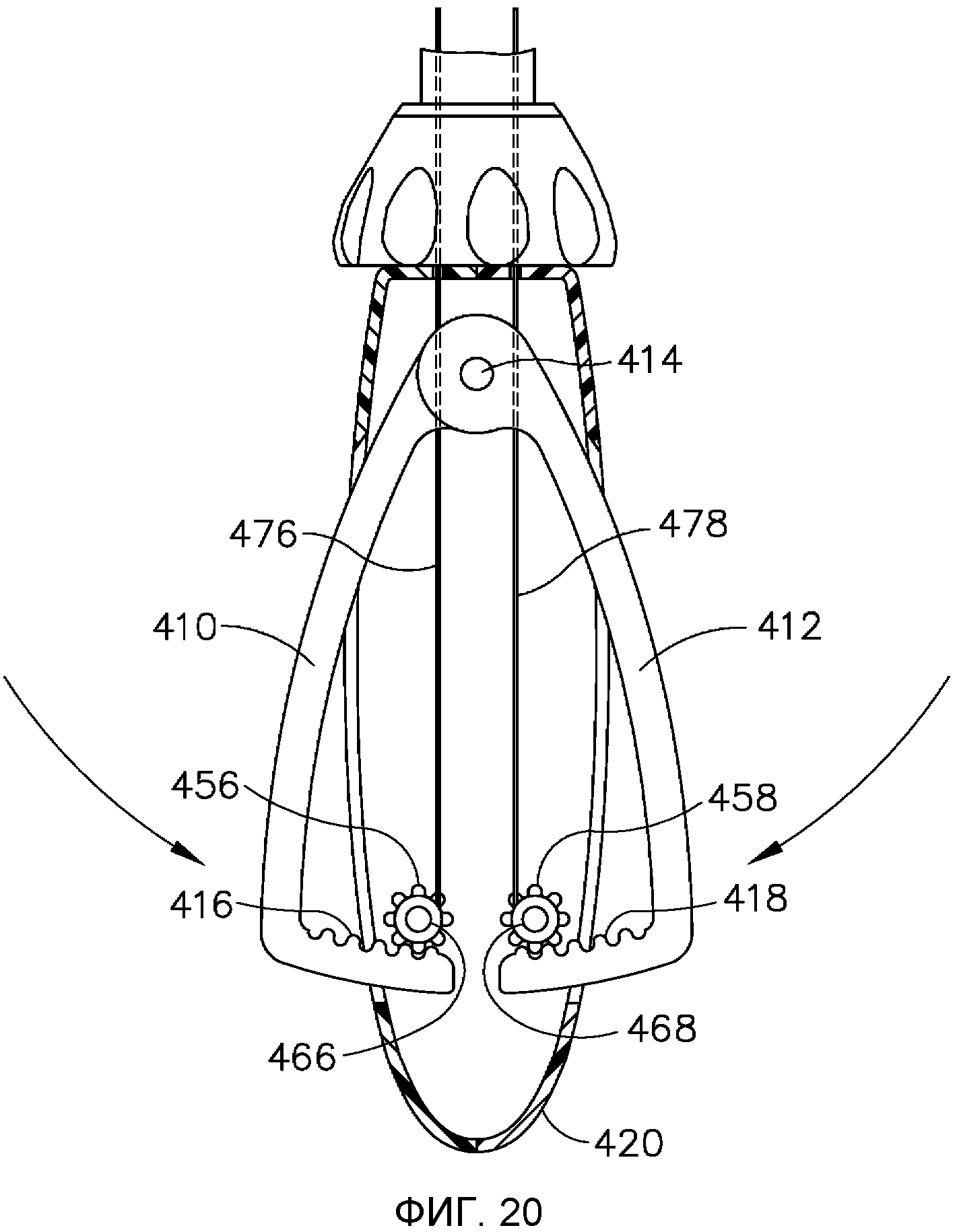
на фиг. 20 изображен частичный разрез другого электрохирургического инструмента с примером альтернативных шарнирных элементов управления;
на фиг. 21 изображен вид сбоку катушки элементов управления шарнирным соединением с фиг. 20;
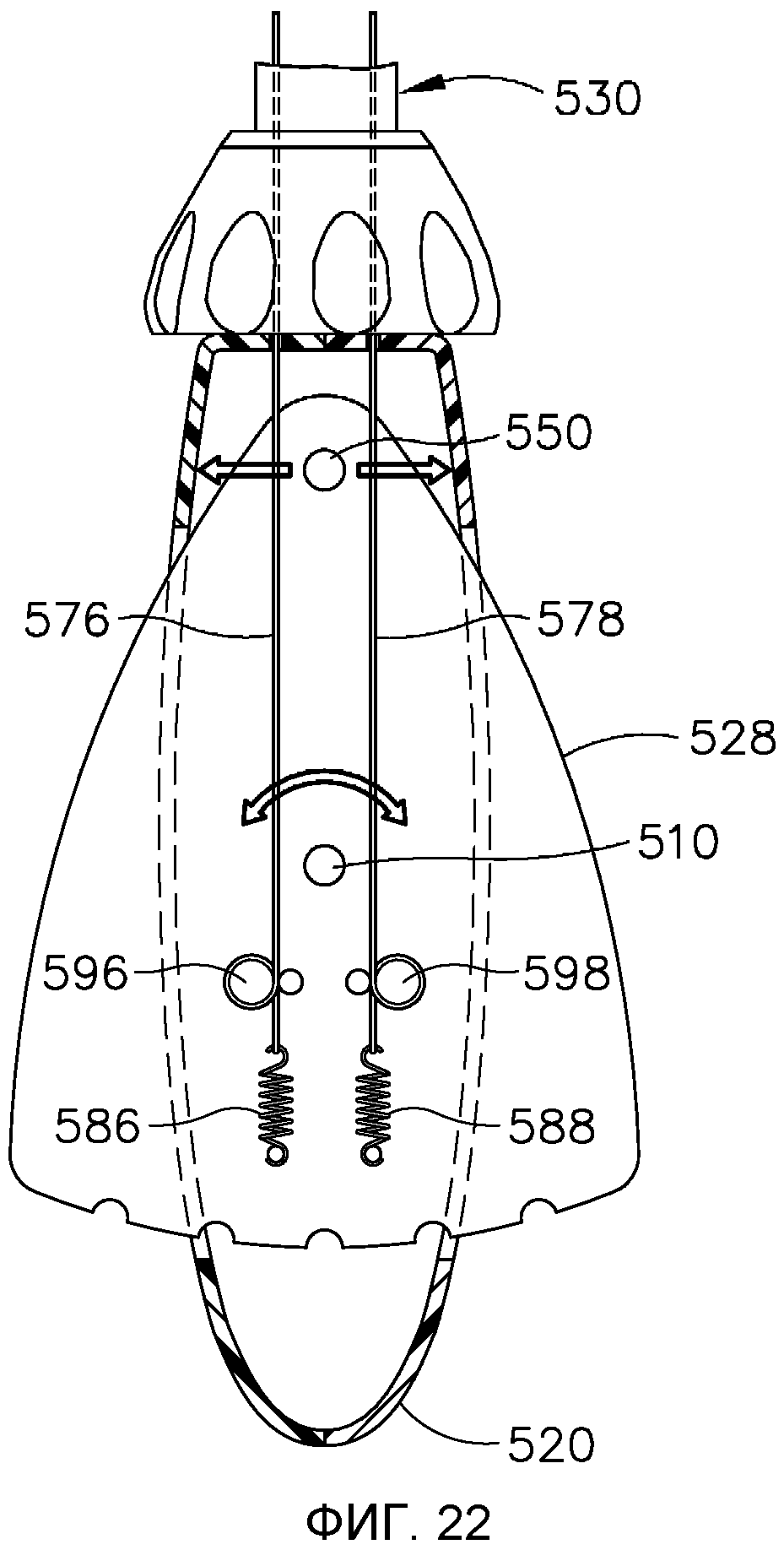
на фиг. 22 изображен частичный разрез другого электрохирургического инструмента с другим набором примеров альтернативных элементов управления шарнирным соединением;
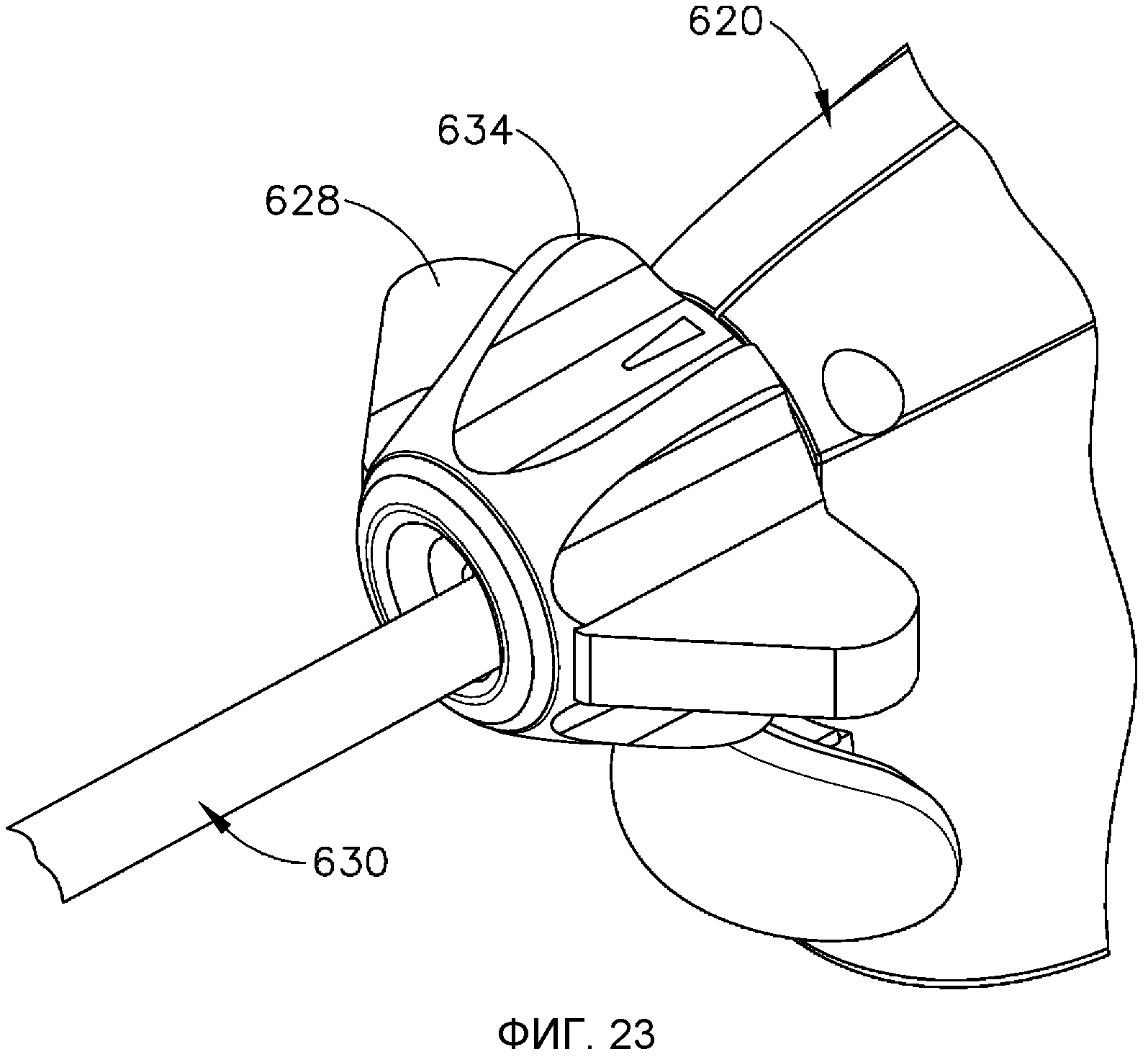
на фиг. 23 изображен вид в перспективе другого электрохирургического инструмента, показывающего пример альтернативного размещения для функции шарнирного управления;
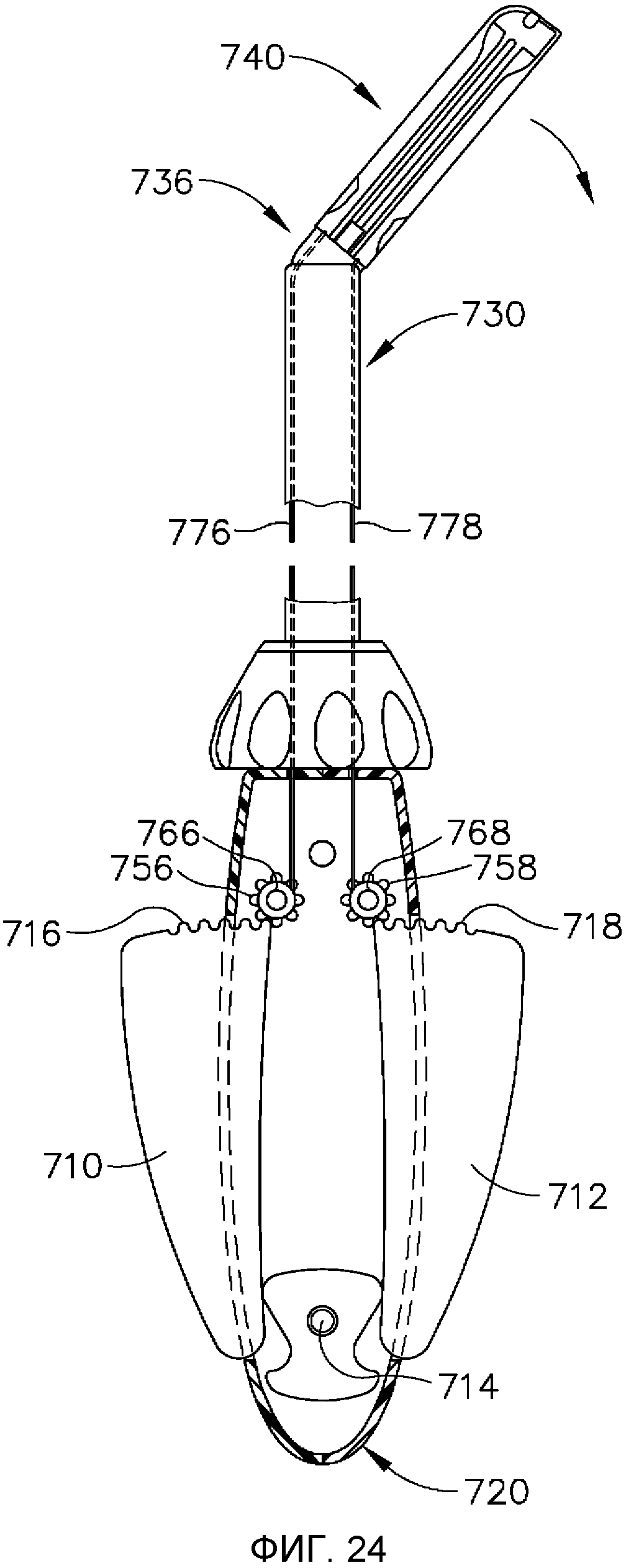
на фиг. 24 изображен частичный разрез другого электрохирургического инструмента с примером другого набора альтернативных элементов управления шарнирным соединением;
на фиг. 25 изображен частичный разрез другого электрохирургического инструмента с примером другого набора альтернативных элементов управления шарнирным соединением;
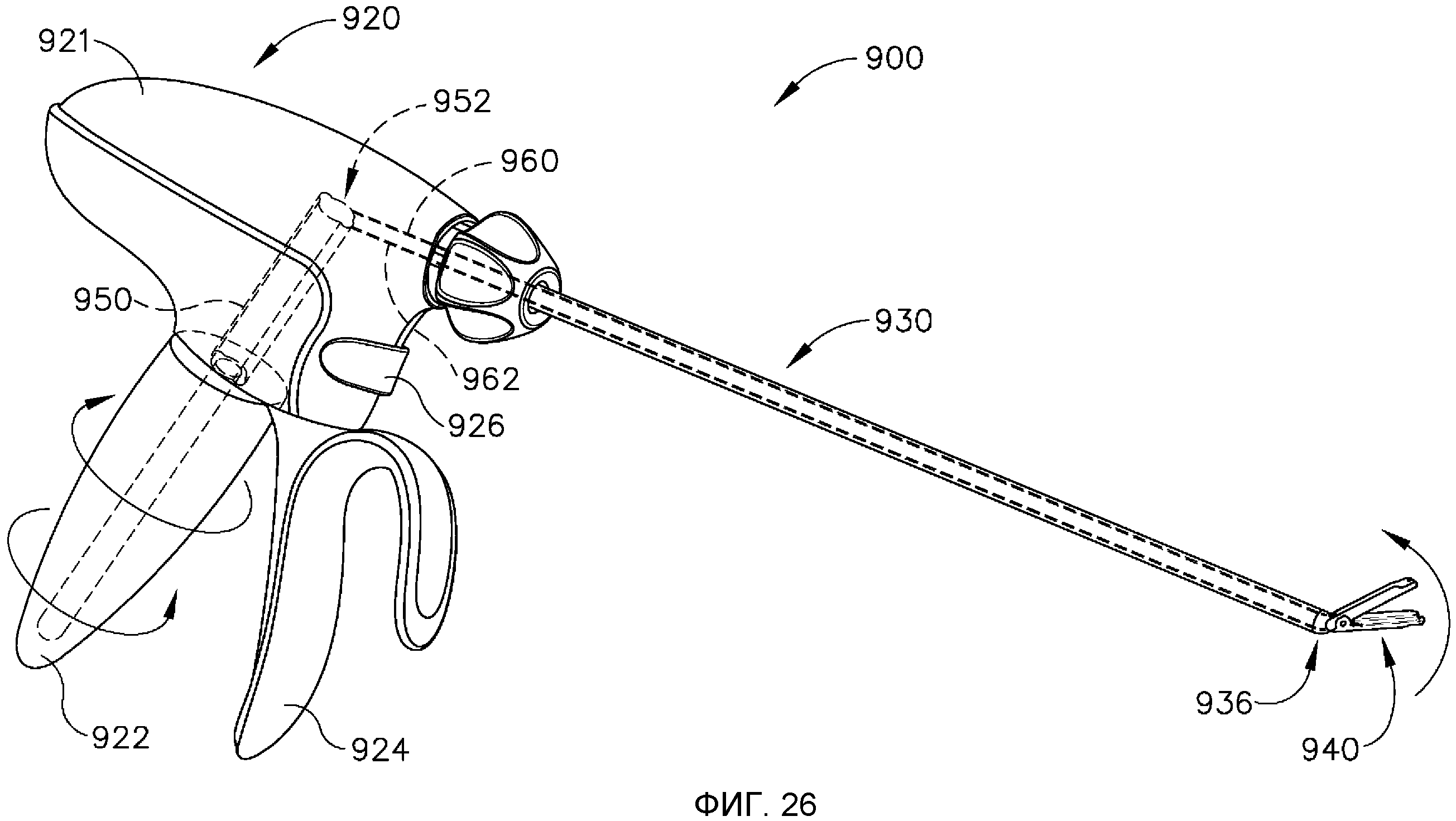
на фиг. 26 изображен вид в перспективе другого примера электрохирургического инструмента с вращающейся пистолетной рукояткой;
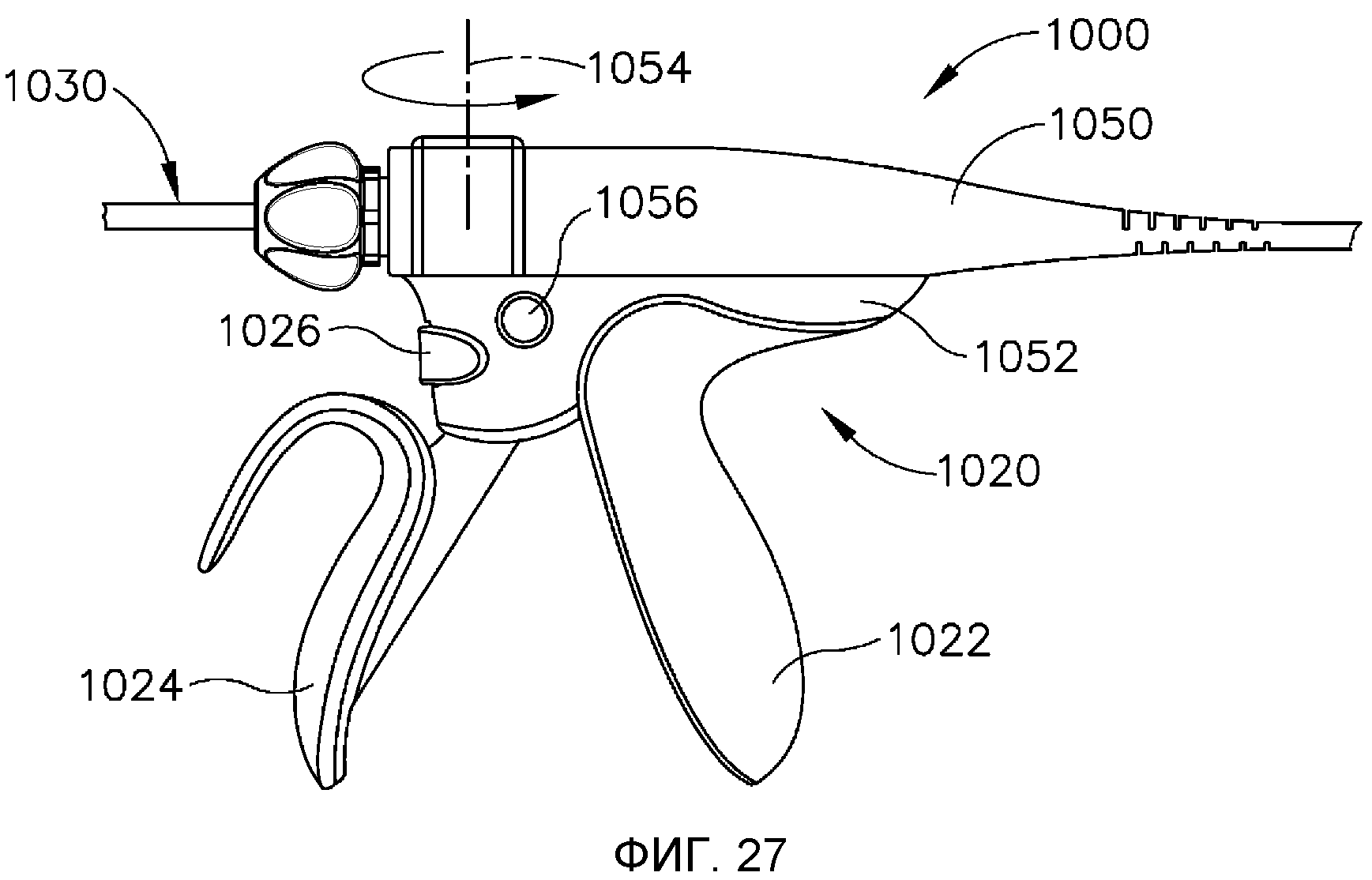
на фиг. 27 изображен вид сбоку другого примера электрохирургического инструмента с поворотной верхней частью;
на фиг. 28А изображен вид сверху прибора с фиг. 27, с верхней частью в исходном положении и концевым эффектором в исходном положении;
на фиг. 28B изображен вид сверху прибора с фиг. 27, с верхней частью в повернутом положении и концевым эффектором в сомкнутом положении;
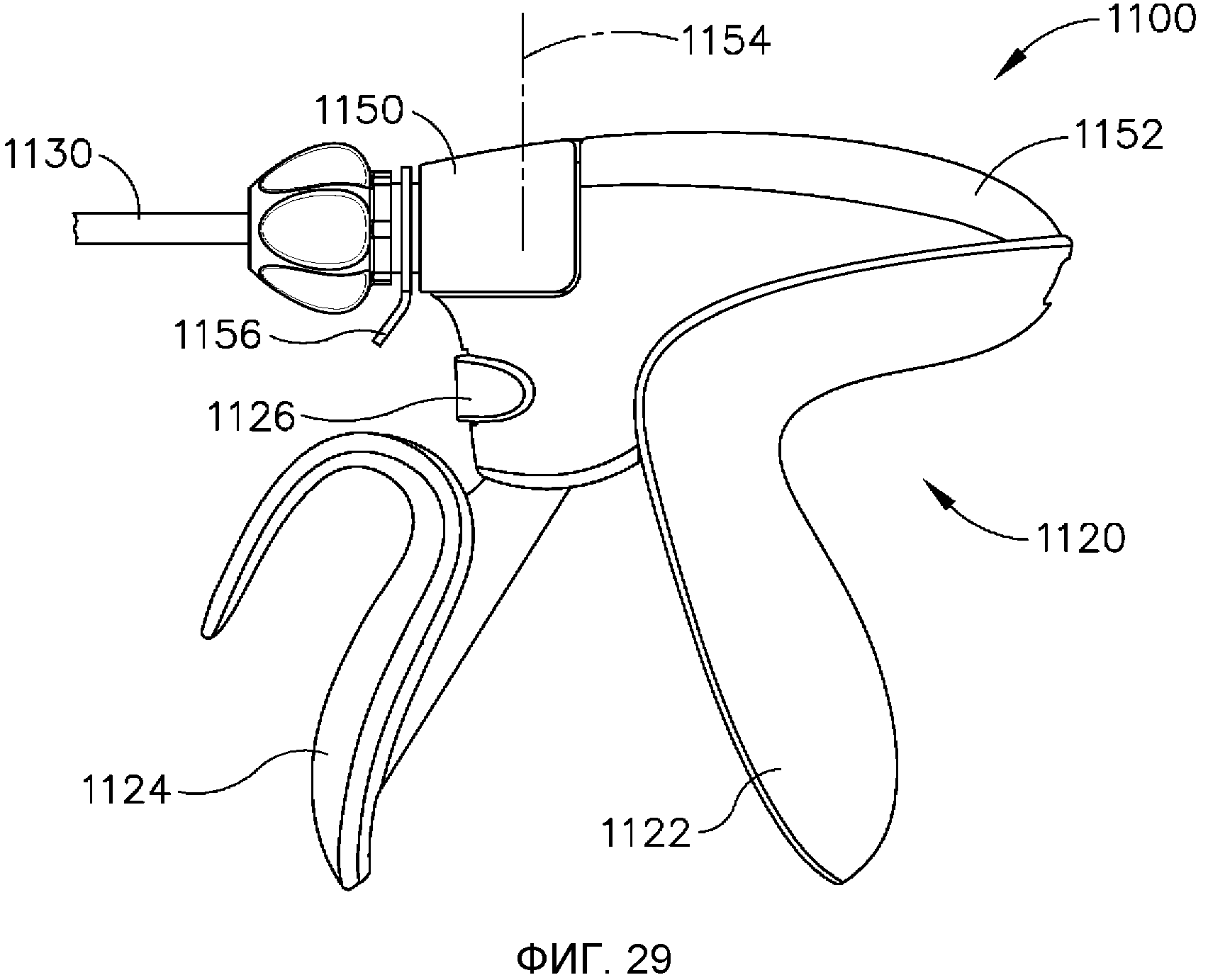
на фиг. 29 изображен вид сбоку другого примера электрохирургического инструмента с поворотной дистальной частью;
на фиг. 30 изображен вид сверху прибора на фиг. 29 с дистальной частью в повернутом положении;
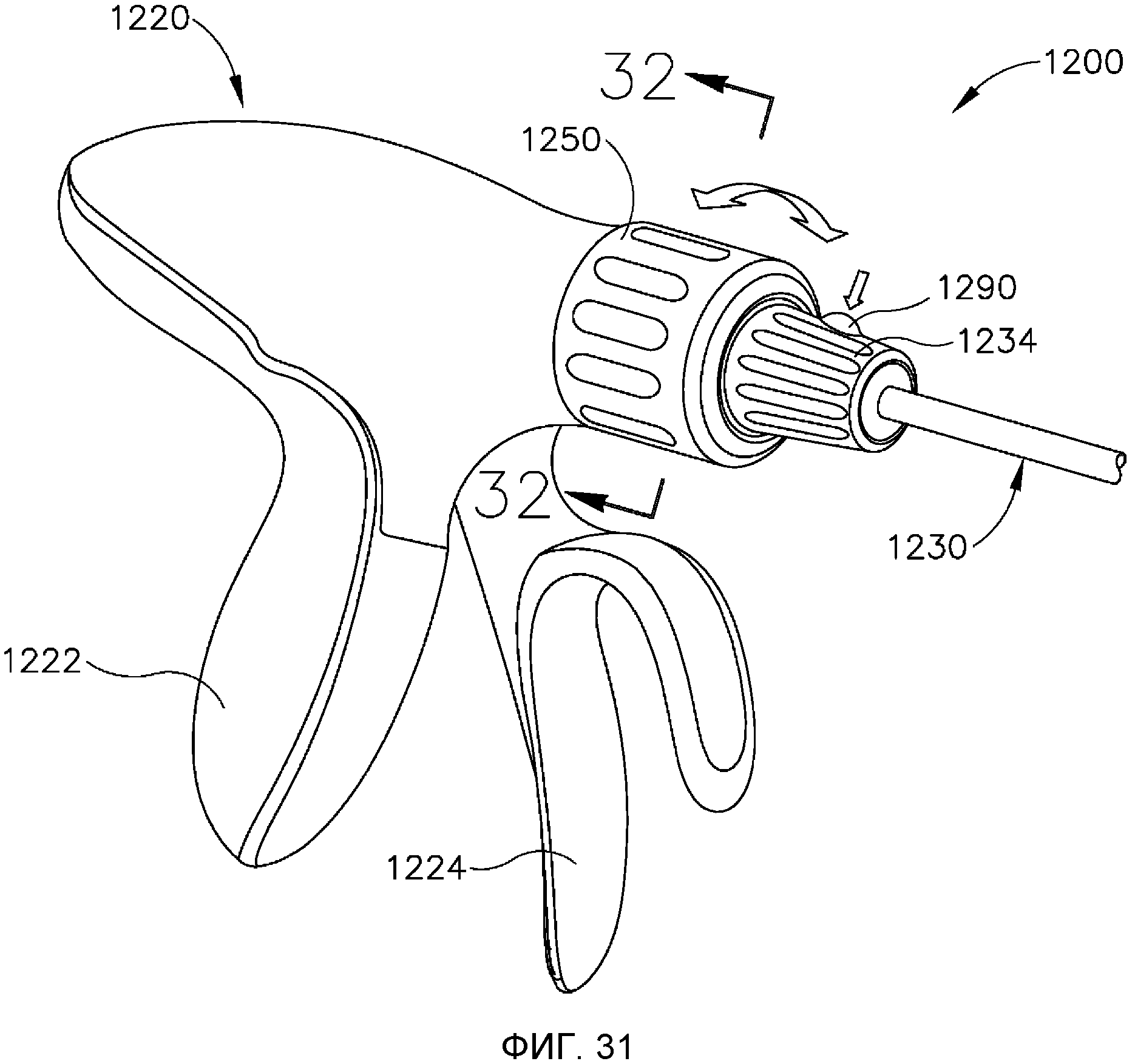
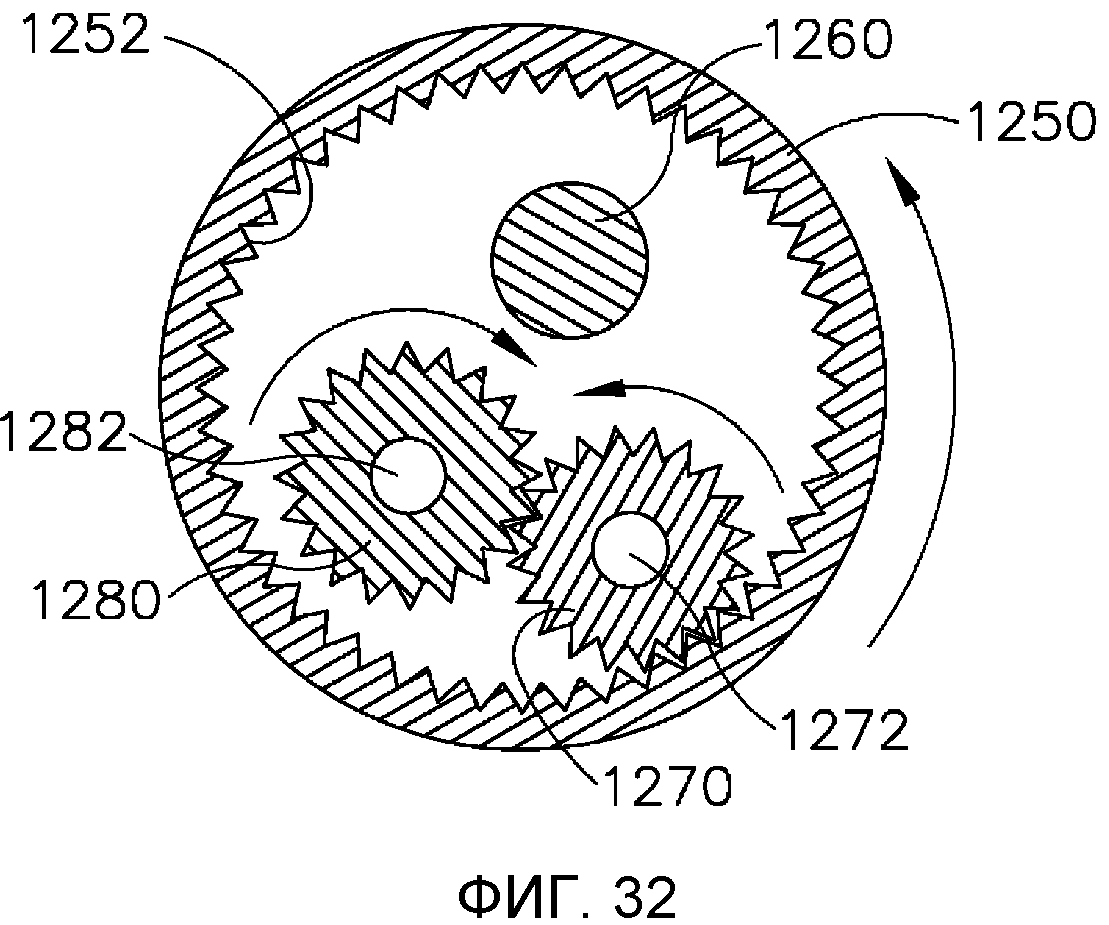
на фиг. 31 изображен вид в перспективе другого примера электрохирургического инструмента с элементом управления шарнирным соединением со сцеплением;
на фиг. 32 изображен частичный вид в разрезе элементов управления шарнирным соединением инструмента с фиг. 31, выполненный вдоль линии 32-32 с фиг. 31;
на фиг. 33 изображен частичный вид в перспективе шарнирных элементов инструмента с фиг. 31;
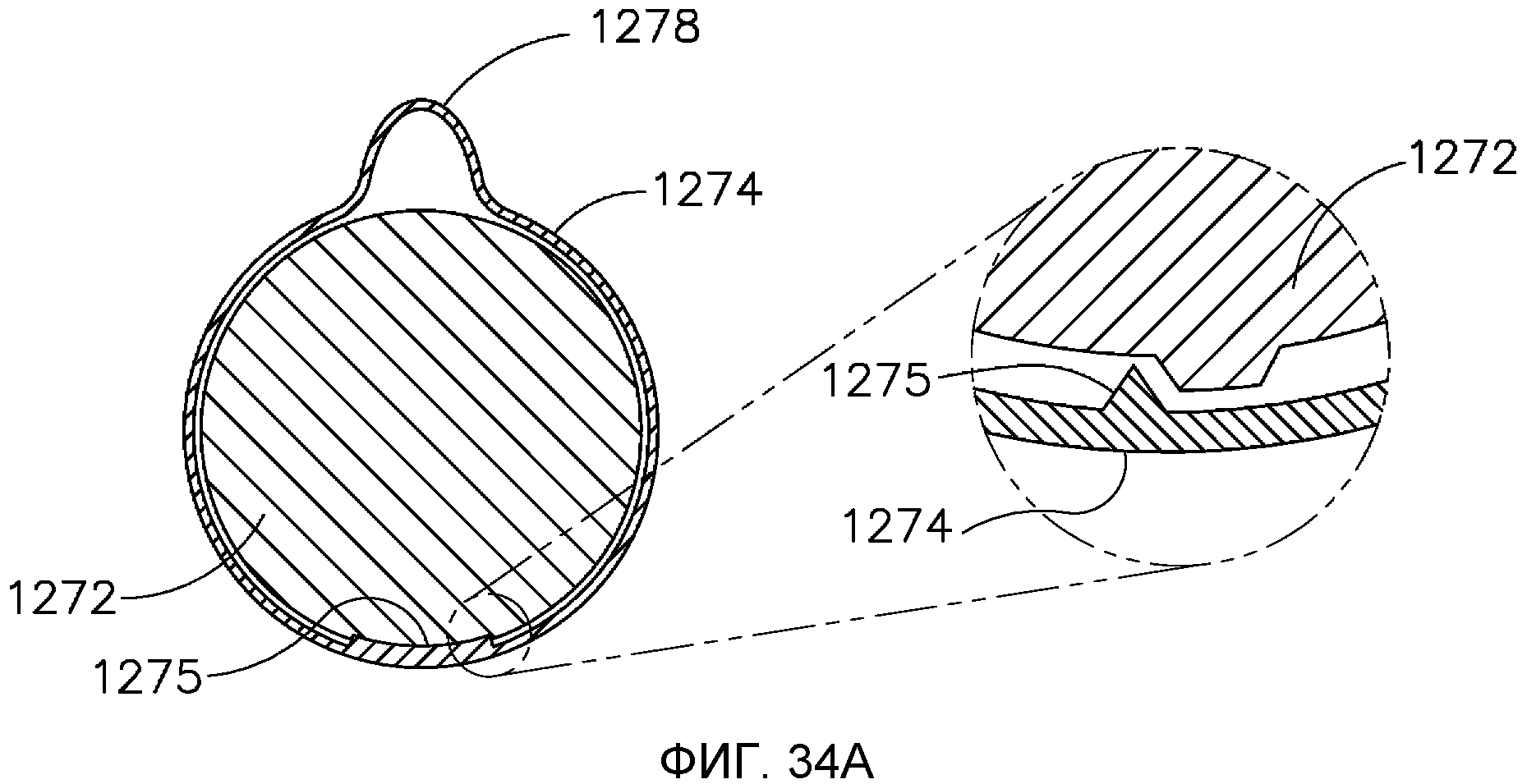
на фиг. 34А изображено поперечное сечение торца и увеличенный вид шарнирных элементов со сцеплением с фиг. 33 в рабочей конфигурации;
на фиг. 34B изображено поперечное сечение торца и увеличенный вид элементов сцепления с фиг. 34A в нерабочей конфигурации;
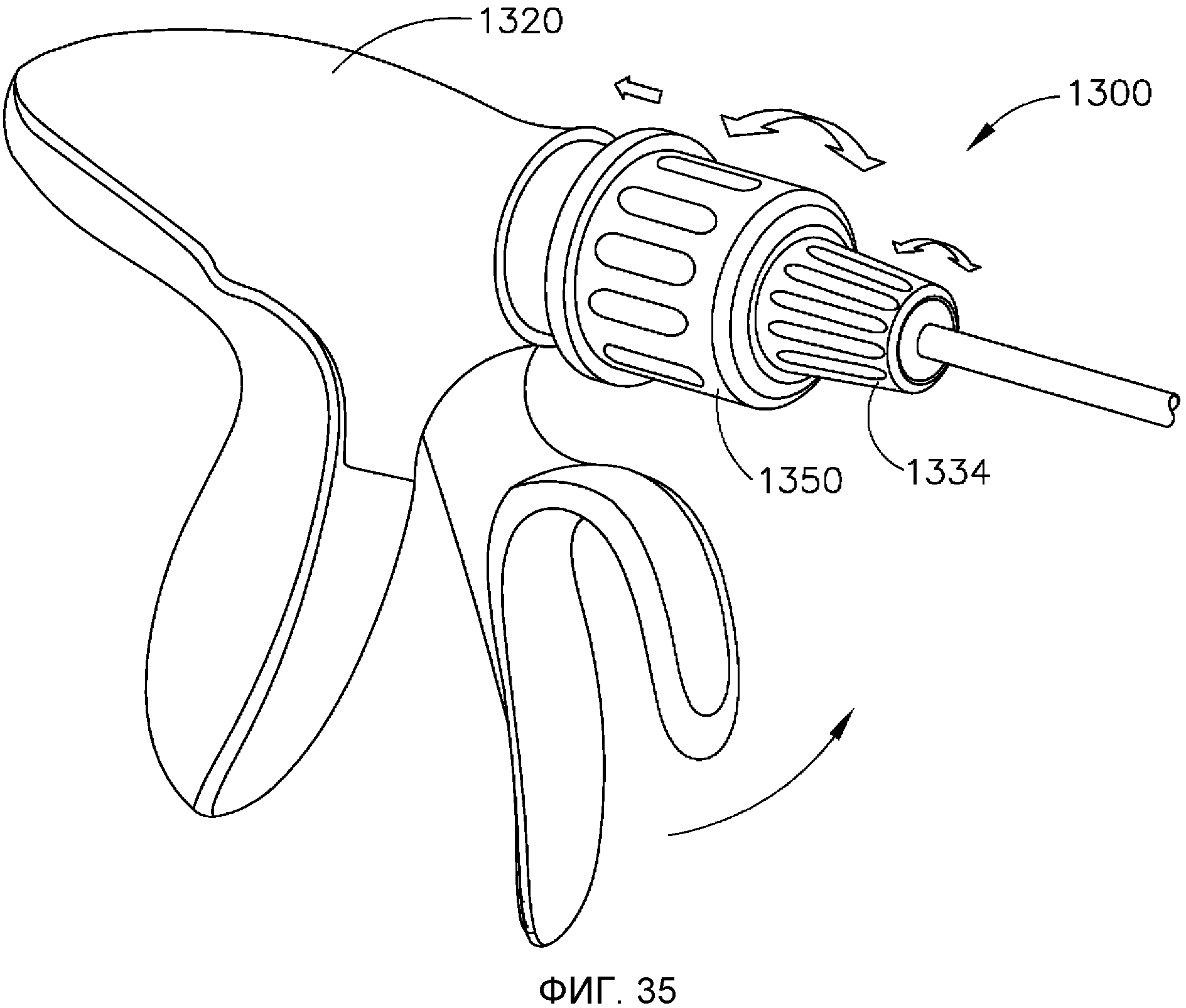
на фиг. 35 изображен вид в перспективе другого примера электрохирургического инструмента с альтернативным примером механизма управления шарнирным соединением со сцеплением;
на фиг. 36 изображен вид сбоку другого примера электрохирургического инструмента с многорежимным спусковым крючком;
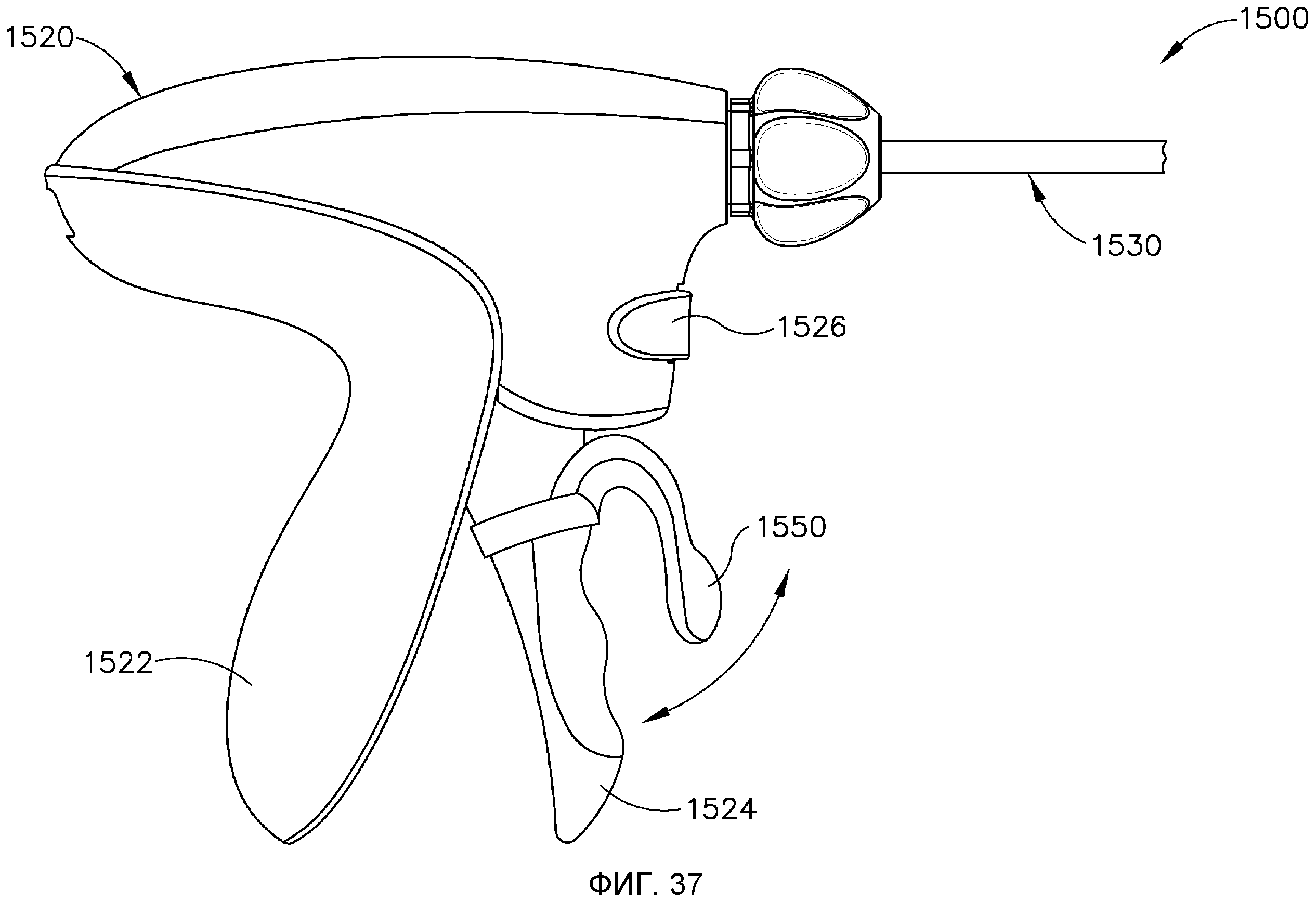
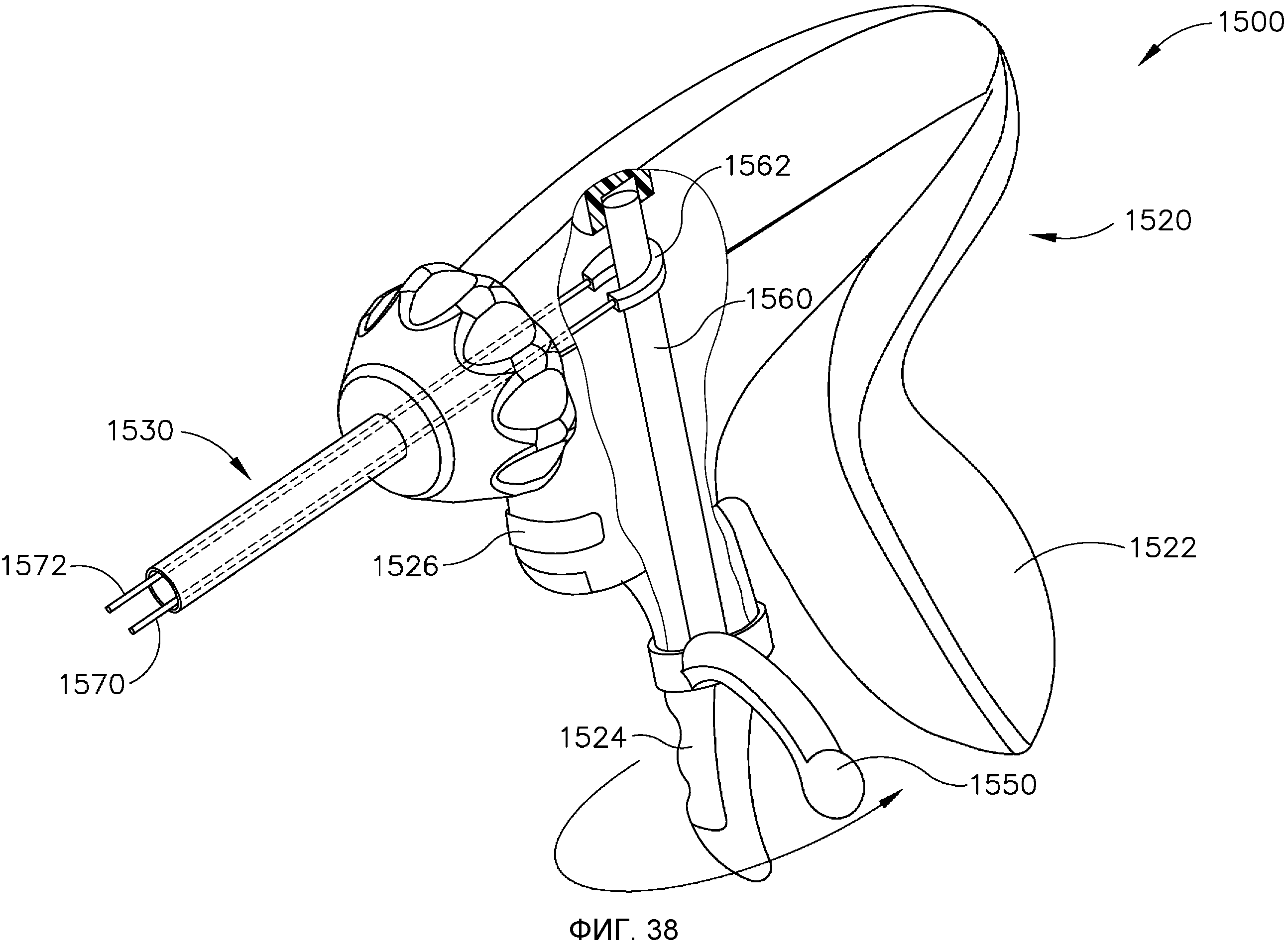
на фиг. 37 изображен вид сбоку другого примера электрохирургического инструмента с шарнирным спусковым крючком;
на фиг. 38 изображен вид в перспективе инструмента с фиг. 37 со спусковым крючком, повернутым для поворота концевого эффектора;
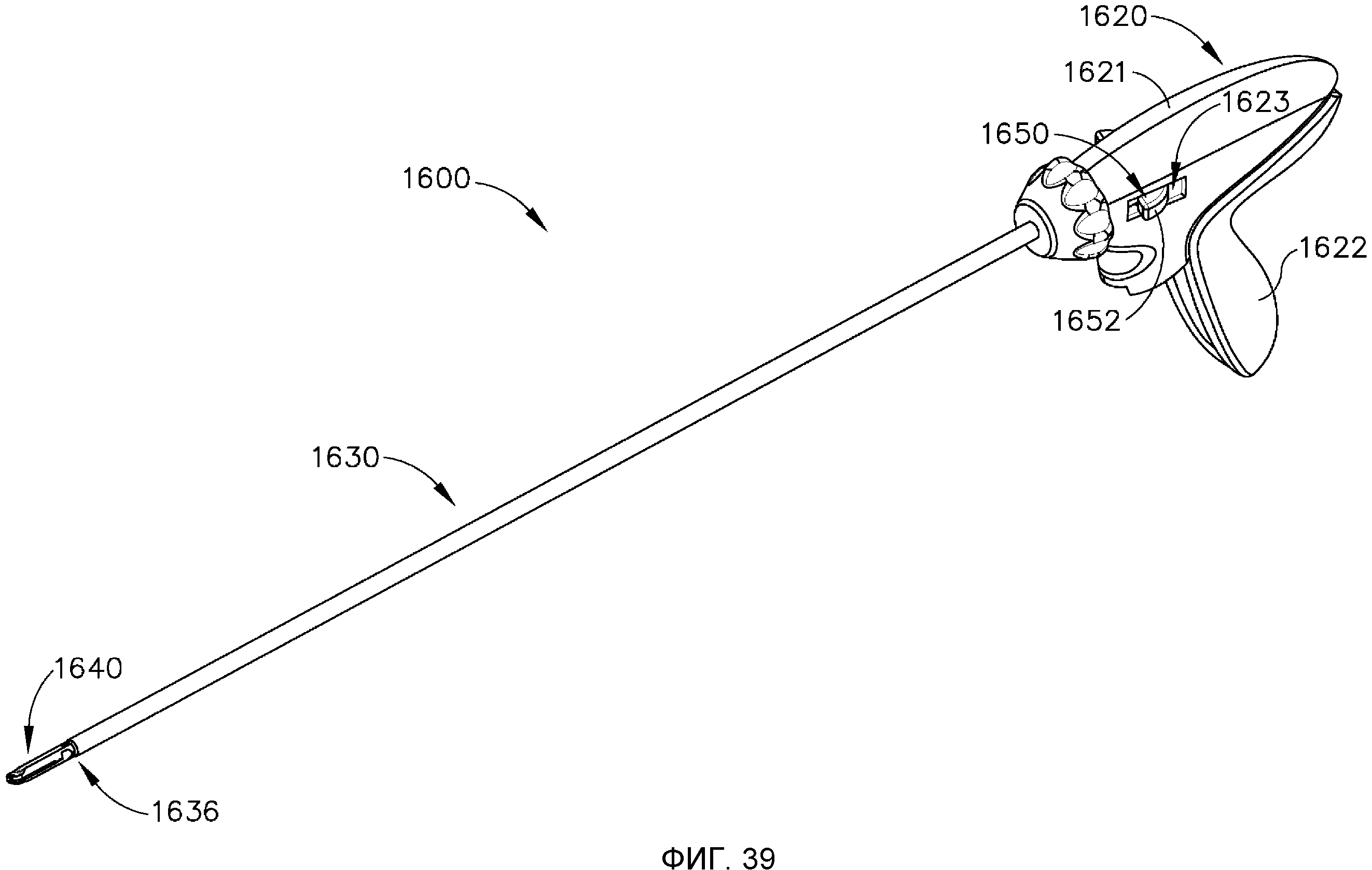
на фиг. 39 изображен вид в перспективе другого примера электрохирургического инструмента с кулачком механизма управления шарнирным соединением;
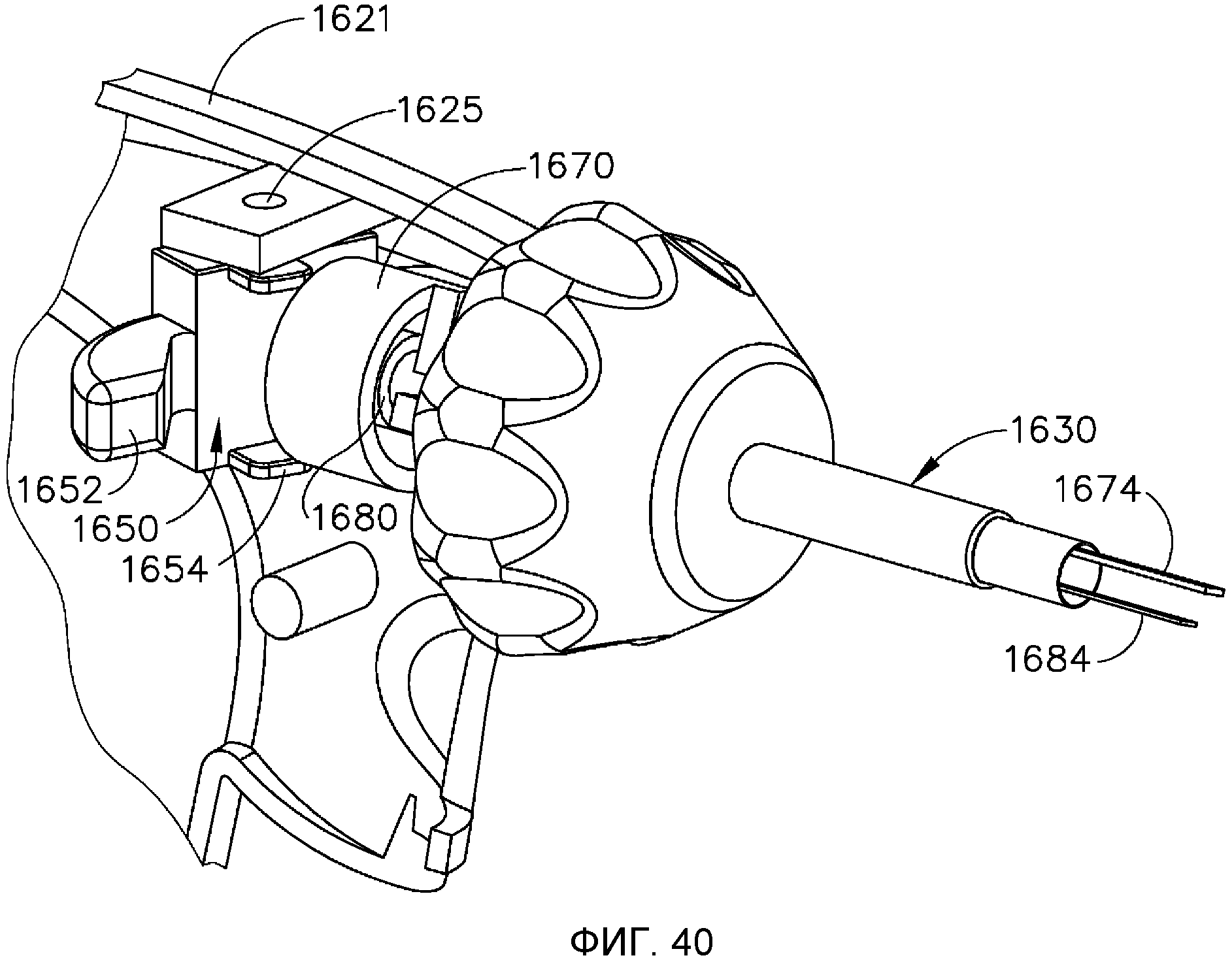
на фиг. 40 изображен частичный вид в перспективе элементов управления шарнирным соединением инструмента с фиг. 39;
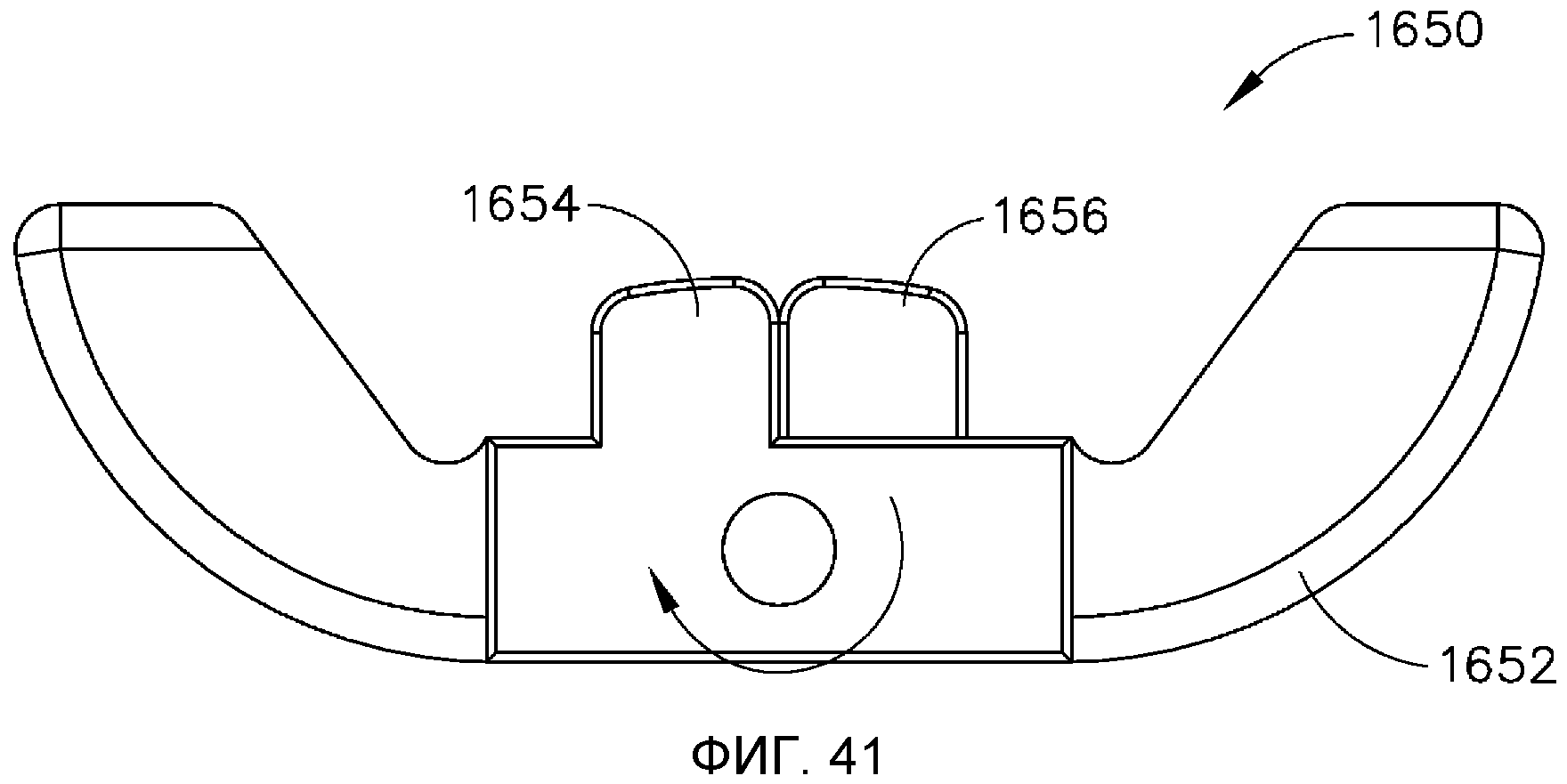
на фиг. 41 изображен вид сверху кулачка механизма управления шарнирным соединением с фиг. 39;
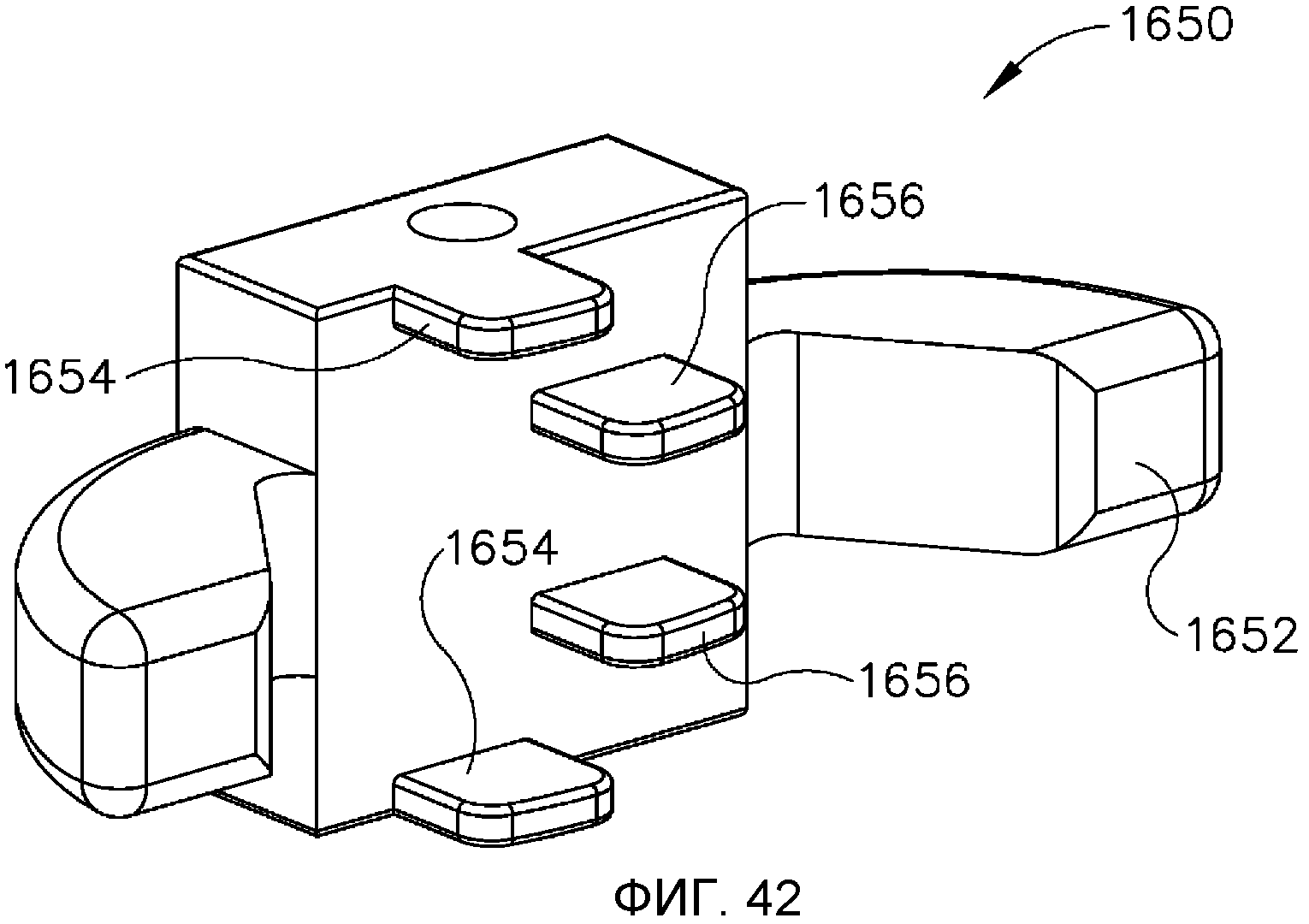
на фиг. 42 изображен вид в перспективе кулачка механизма управления шарнирным соединением с фиг. 39; и
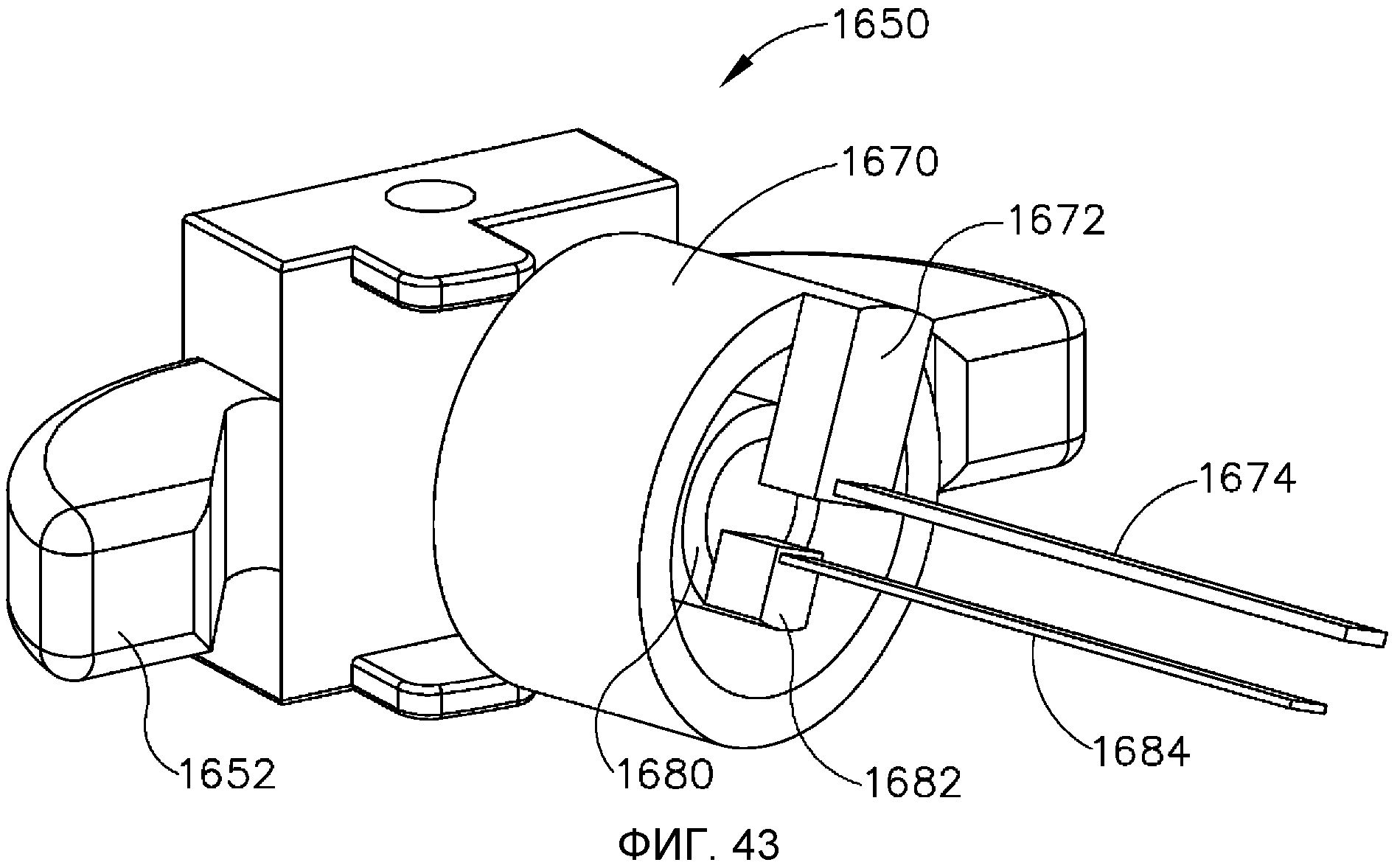
на фиг. 43 изображен вид в перспективе кулачка механизма управления шарнирным соединением с фиг. 39, взаимодействующего с другими элементами шарнирного управления.
Фигуры не призваны служить какого-либо рода ограничением, и предполагается, что различные варианты технологии можно реализовать другими способами, в том числе и необязательно изображенными на фигурах. Прилагаемые к спецификации чертежи являются ее частью и иллюстрируют несколько аспектов данной технологии и наряду с описанием служат для объяснения ее принципов; при этом понимается, что эта технология не ограничивается конкретными механизмами, показанными на фигуре.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Последующее описание некоторых примеров реализации технологии не следует воспринимать как ограничение сферы его применения. Другие примеры, свойства, аспекты, варианты и преимущества технологии станут очевидными для специалистов в данной области из следующего описания, которое является иллюстрацией одного из лучших способов реализации технологии. Как станет понятно, технология, описанная в данном документе, может реализоваться с различными другими очевидными аспектами без отклонения от технологии. Соответственно, чертежи и описания следует рассматривать как иллюстрации, а не ограничения.
Кроме того, принимается, что любые описанные здесь инструкции, выражения, варианты, примеры и т.д. могут комбинироваться с любыми другими описанными здесь инструкциями, выражениями, вариантами, примерами, и т.д. Поэтому не следует рассматривать описанные ниже инструкции, выражения, варианты, примеры и т.д. в отрыве друг от друга. Различные приемлемые способы комбинирования представленных здесь инструкций очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Предполагается, что объем заявленной формулы изобретения охватывает все такие модификации и варианты.
I. Пример электрохирургического устройства с шарнирным механизмом
На фиг. 1-4 показан пример электрохирургического инструмента (10), произведенного и работающего в соответствии, по крайней мере, с частью информации в патенте США номер 6500176; патенте США № 7112201; патенте США № 7125409; патенте США № 7169146; патенте США № 7186253; патенте США № 7189233; патенте США № 7220951; патенте США № 7309849; патенте США № 7311709; патенте США № 7354440; патенте США № 7381209; публикации США № 2011/0087218; или заявке на патент США № 13/151181. Как описано в указанных документах и как будет подробнее описано ниже, электрохирургический инструмент (10) выполнен с возможностью практически одновременно резать и скреплять ткани (например, кровеносные сосуды, и т.д.) путем закупоривания или сварки. Другими словами, электрохирургический инструмент (10) работает аналогично сшивающему аппарату типа эндоскопического резца, но электрохирургический инструмент (10) обеспечивает скрепление тканей путем применения биполярной РЧ энергии вместо установки скоб для скрепления ткани. Также следует понимать, что у электрохирургического инструмента (10) могут иметься различные структурные и функциональные сходства со сшивателем тканей ENSEAL® производства компании Этикон Эндо-Серджери Инк, Цинциннати, штат Огайо, США. Кроме того, у электрохирургического инструмента (10) могут иметься различные структурные и функциональные сходства с устройствами, представленными в любом из документов, включенных в данную заявку посредством ссылки. В том смысле, что между инструкциями в приводимых здесь документах, сшивателем тканей ENSEAL® производства компании Этикон Эндо-Серджери, Инк, Цинциннати, штат Огайо, США и последующими инструкциями, связанными с электрохирургическим инструментом (10), существуют определенные совпадения, не предполагается считать какие-либо из приводимых описаний признанным известным уровнем техники. Часть приведенной ниже информации выходит за рамки информации в документах, на которые ссылается данная заявка, и сшивателя тканей ENSEAL® производства компании Этикон Эндо-Серджери, Инк, Цинциннати, штат Огайо, США.
A. Пример рукоятки и стержня
Электрохирургический инструмент (10) в настоящем примере включает рукоятку (20), стержень (30), вставленный в рукоятку (20), и концевой эффектор (40), расположенный на дистальном конце стержня (30). Рукоятка (20) в настоящем примере включает пистолетную рукоятку (22), поворотный спусковой крючок (24), кнопку активации (26) и элемент управления шарнирным механизмом (28). Спусковой крючок (24) можно прижимать к рукоятке (22) и отжимать от нее для приведения в действие концевого эффектора (40), как подробнее описано ниже. Кнопка активации (26) позволяет выборочно активировать радиочастотные цепи, связанные с концевым эффектором (40), как подробнее описано ниже. В некоторых версиях кнопка активации (26) также позволяет механически блокировать спусковой крючок (24), чтобы его нельзя было полностью привести в действие, если одновременно не нажата кнопка (26). Примеры реализации блокировки представлены в ряде документов, на которые ссылается настоящая заявка. Следует иметь в виду, что рукоятку (22), спусковой крючок (24) и кнопку (26) можно модифицировать, заменять, дополнять и т.д. любым подходящим способом, а описания этих компонентов в настоящем документе служат только в качестве иллюстрации. Элемент управления шарнирным механизмом (28) в данном примере выполнен с возможностью выборочного контроля шарнирной части (36) стержня (30), как подробнее описано ниже. Различные примеры форм элемента управления шарнирным механизмом (28) также подробнее описаны ниже, а другие примеры очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
Стержень (30) в данном примере включает внешний кожух (32) и шарнирную часть (36). Шарнирная часть (36) позволяет выборочно устанавливать концевой эффектор (40) под различными углами по отношению к продольной оси, определяемой кожухом (32). Различные примеры форм, которые могут принимать шарнирная часть (36) и прочие компоненты стержня (30), также подробнее описаны ниже, а другие примеры очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Например, следует понимать, что различные компоненты, позволяющие приводить в действие шарнирную часть (36), могут выходить за пределы кожуха (32). В некоторых вариантах стержень (30) также можно поворачивать относительно концевой рукоятки (20) вокруг продольной оси, определяемой кожухом (32), с помощью ручки (34). При этом концевой эффектор (40) и стержень (30) могут поворачиваться одновременно. В некоторых других версиях ручка (34) позволяет вращать концевой эффектор (40) без поворота какой-либо части стержня (30), находящейся рядом с шарнирной частью (36). В другом наглядном примере электрохирургический инструмент (10) может включать элемент управления вращением, позволяющий вращать стержень (30) и концевой эффектор (40) как единое целое; а также другой элемент управления, обеспечивающий вращение концевого эффектора (40) без вращения какой-либо части стержня (30), находящейся рядом с шарнирной частью (36). Другие применимые возможности вращения очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Естественно, при необходимости, возможность вращения можно полностью исключить.
B. Пример концевого эффектора
Концевой эффектор (40) в данном примере содержит первую браншу (42) и вторую браншу (44). В данном примере, вторая бранша (44) по сути неподвижна относительно стержня (30); а первая бранша (42) поворачивается относительно стержня (30) ко второй бранше (42) и от нее. В некоторых вариантах, через кожух (32) могут быть проведены приводные элементы в виде стержней, тросов и т.д., соединенные с первой браншей (42) при помощи вращающейся втулки (43) таким образом, что продольное движение приводного стержня/кабеля/и т.д. внутри стержня (30) обеспечивает поворот первой бранши (42) относительно стержня (30) и относительно второй бранши (44). Естественно, вместо этого бранши (42, 44) могут двигаться любым другим подходящим образом и приводиться в действие любым подходящим способом. Только в качестве примера и как подробнее описано ниже, бранши (42, 44) могут приводиться в действие и закрываться посредством продольного движения режуще-сшивающего элемента (60); таким образом, в некоторых вариантах приводные стержни/кабели/и т.д. могут просто не использоваться.
Как лучше всего видно на фиг. 2-4, первая бранша (42) содержит продольно удлиненную выемку (46), и вторая бранша (44) также содержит продольно удлиненную выемку (48) Кроме того, на верхней стороне первой бранши (42) располагается первая электродная поверхность (50); а на нижней поверхности второй бранши (44) располагается вторая электродная поверхность (52). Электродные поверхности (50, 52) связаны с источником электропитания (80) одним или несколькими проводами (не показаны), проходящими по всей длине стержня (30). Источник электропитания (80) обеспечивает доставку радиочастотной энергии на первую электродную поверхность (50) первой полярности и на вторую электродную поверхность (52) второй (противоположной) полярности, так, что между электродными поверхностями (50, 52) возникает РЧ ток, а ткань тем самым захватывается между браншами (42, 44). В некоторых вариантах режуще-сшивающий элемент (60) служит в качестве электрического проводника, совместно с электродными поверхностями (50, 52) (например, в качестве возвратного заземления) обеспечивающего доводку биполярной радиочастотной энергии, захваченной между браншами (42, 44). Источник электропитания (80) может быть внешним по отношению к электрохирургическому инструменту (10) или встроен в электрохирургический инструмент (10) (например, в рукоятку (20) и т.д.), как описано в одном из документов, на которые ссылается данная заявка или иным образом. Регулятор (82) регулирует ток электрической энергии от источника (80) к электродным поверхностям (50, 52). Регулятор (82) может также быть внешним по отношению к электрохирургическому инструменту (10) или встроенным в электрохирургический инструмент (10) (например, в рукоятку (20) и т.д.), как описано в одном из документов, на которые ссылается данная заявка или иным образом. Следует также понимать, что электродные поверхности (50, 52) могут размещаться в альтернативных местах, конфигурациях и с другими связями.
Как лучше всего видно на фиг. 4, в нижнюю сторону первой бранши (42) встроено продольное углубление (58), прилегающее к пазу (46); а верхняя часть второй бранши (44) включает продольное углубление (58), прилегающее к пазу (48). На фиг. 2 показана верхняя часть первой бранши (42) с большим количеством насечек (46). Следует иметь в виду, что на нижней стороне второй бранши (44) могут располагаться дополнительные насечки, совмещающиеся с насечками (46), для более плотного захвата ткани между браншами (42, 44), необязательно с разрывом ткани. На фиг. 3 показан пример насечек (46) на первой бранше (42), в основном в виде углублений, и насечек (48) на второй бранше (44), в основном выступов. Конечно, насечки (46, 48) могут быть выполнены в любой другой подходящей форме или просто совсем не использоваться. Следует также иметь в виду, что насечки (46, 48) могут производиться из непроводящих или изоляционных материалов, таких как, например, пластик, стекло или керамика, и могут быть обработаны, например политетрафторэтиленом, смазывающим веществом или другим образом, чтобы в значительной мере предотвратить прилипание ткани к браншам (42, 44).
Стержень (30) и концевой эффектор (40) подогнаны по размеру и конфигурации так, чтобы, когда бранши (42, 44) находятся в закрытом положении, помещаться в троакары с различными внутренними диаметрами, чтобы электрохирургический инструмент (10) можно было использовать в минимально инвазивной хирургии, при том, что электрохирургический инструмент (10), конечно, также можно при желании использовать в открытых процедурах. В качестве примера, когда бранши (42, 44) находятся в закрытом положении, общий внешний диаметр стержня (30) и концевого эффектора (40) может составлять около 5 мм. Кроме того, стержень (30) и концевой эффектор (40) могут иметь любой другой подходящий общий внешний диаметр (например, от около 2 мм до около 20 мм, и т.д.).
В качестве еще одного варианта для иллюстрации любая из браншей (42, 44) или обе бранши (42, 44) могут включать, по крайней мере, один порт, проход, желоб или иное приспособление, позволяющее выводить пар, дым и другие газы/пары/и т.д. с места операции. Такое приспособление может быть связано с источником всасывания, например, внешним источником или источником в рукоятке (20) и т.д. Кроме того, в концевой эффектор (40) может быть встроено одно или несколько приспособлений для охлаждения тканей (не показаны), снижающих количество тепловой энергии, передаваемой соседним тканям концевым эффектором (40) при активации электродных поверхностей (50, 52). Различные подходящие формы таких приспособлений для охлаждения очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
В некоторых вариантах в концевой эффектор (40) встраивается один или несколько датчиков (не показаны), настроенных на восприятие различных параметров вблизи концевого эффектора (40), включая температуру прилегающих тканей, электрическое сопротивление и полное электрическое сопротивление прилегающих тканей, напряжение на соседние ткани, действующие на бранши (42, 44) силы со стороны прилегающих тканей и т.д. В качестве примера, в концевой эффектор (40) может быть встроен один или несколько термисторов (54, 56) с положительным температурным коэффициентом (ПТК) (например, ПТК-полимер, и т.д.), расположенных рядом с электродами (50, 52) или в другом месте. Данные с датчиков могут передаваться на регулятор (82). Регулятор (82) может обрабатывать такие данные различными способами. Например, регулятор (82) может модулировать или иным образом изменять радиочастотную энергию, выводимую на электродные поверхности (50, 52), на основе, по меньшей мере, части данных, полученных от одного или нескольких датчиков на концевом эффекторе (40). Кроме того или в качестве альтернативы, регулятор (82) может предупреждать пользователя об одном или нескольких условиях при помощи приспособлений звуковой или визуальной обратной связи (например, динамика, лампочки, экрана и т.д.), на основе, по меньшей мере, части данных, полученных от одного или нескольких датчиков на концевом эффекторе (40). Следует также иметь в виду, что некоторые виды датчиков не обязательно должны быть связаны с регулятором (82), но могут просто обеспечивать локализованное действие на концевом эффекторе (40). Например, ПТК-термисторы (54, 56) на концевом эффекторе (40) могут автоматически понижать количество энергии, поступающей на электродные поверхности (50, 52), при повышении температуры ткани или концевого эффектора (40), тем самым снижая вероятность перегрева. В некоторых вариантах элемент ПТК-термистора соединяется с источником питания (80) и электродными поверхностями (50, 52) последовательно, а ПТК-термистор обеспечивает повышение общего сопротивления (сокращение силы тока) при температурах, превышающих заданный порог. Кроме того, следует иметь в виду, что электродные поверхности (50, 52) могут быть использованы в качестве датчиков (например, для измерения общего сопротивления тканей, и т.д.). Различные виды датчиков, которые можно встроить в электрохирургический инструмент (10), очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Подобным же образом различные операции с полученными от датчиков данными, которые могут выполняться регулятором (82) или другом приспособлении, очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Другие подходящие варианты концевого эффектора (40) также очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
C. Пример режуще-сшивающего элемента
Как видно также на фиг. 2-4, электрохирургический инструмент (10) в данном примере включает режуще-сшивающий элемент (60), который способен продольно перемещаться вдоль части длины концевого эффектора (40). Режуще-сшивающий элемент (60) расположен внутри стержня (30) вдоль его оси и по всей длине стержня (30) и проходит продольно по всему стержню (30) (в том числе по шарнирной части (36) в данном примере), хотя следует иметь в виду, что режуще-сшивающий элемент (60) и стержень (30) могут находиться в любом другом приемлемом соотношении. Режуще-сшивающий элемент (60) включает острое дистальное лезвие (64), верхнюю закраину (62) и нижнюю закраину(66). Как лучше всего видно на фиг. 4, дистальное лезвие (64) проходит через пазы (46, 48) браншей (42, 44), при этом, верхняя закраина (62) находится выше бранши (44) в углублении (59), а нижняя закраина (66) находится ниже бранши (42) в углублении (58). Сечение дистального лезвия (64) и закраин (62, 66) в разрезе походит на букву "I" на дальнем конце стержня-активатора (60). Хотя закраины (62, 66) проходят продольно только по небольшой части длины режуще-сшивающего элемента (60) в данном примере, следует иметь в виду, что закраины (62, 66) могут проходить в продольном направлении по любой необходимой части длины режуще-сшивающего элемента (60). Кроме того, хотя закраины (62, 66) расположены вдоль внешней части браншей (42, 44), закраины (62, 66) могут также быть расположены в соответствующих пазах в браншах (42, 44). Например, каждая бранша (42, 44) может ограничивать «Т»-образный паз, где части дистального лезвия (64) располагаются в одной вертикальной части каждого «Т»-образного паза, а закраины (62, 66) располагаются в горизонтальных частях «Т»-образных пазов. Другие подходящие конфигурации и отношения очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
Дистальное лезвие (64) является в достаточной мере острым, чтобы легко разрезать ткань, захваченную между браншами (42, 44). Дистальное лезвие (64) также заземлено в данном примере, обеспечивая обратный путь для радиочастотной энергии, как описано в другой части данной заявки. В некоторых других вариантах дистальное лезвие (64) выступает в качестве активного электрода. Кроме того или в качестве альтернативы, дистальное лезвие (64) можно подключать к источнику ультразвуковой энергией (например, гармонических колебаний около 55,5 кГц и т.д.).
Конфигурация режуще-сшивающего элемента (60) в форме буквы «I» обеспечивает закрытие браншей (42, 44) по мере дистального продвижения режуще-сшивающего элемента (60). В частности, закраина (62) подталкивает браншу (44) на шарнире к бранше (42) по мере выдвижения режуще-сшивающего элемента (60) из проксимального положения (на фиг. 1-3) в дистальное положение (на фиг. 4) путем давления на углубление (59) в бранше (44). Закрытие браншей (42, 44) под воздействием режуще-сшивающего элемента (60) может произойти до того, как дистальное лезвие (64) достигнет тканей, зажатых между браншами (42, 44). Постепенное продвижение режуще-сшивающего элемента (60) может сократить усилия, необходимые для нажатия курка (24) для проведения режуще-сшивающего элемента (60) через полный цикл действия. Иными словами, в некоторых из таких вариантов режуще-сшивающий элемент (60) может уже преодолеть первоначальное сопротивление, необходимое для почти полного сжатия браншей (42, 44) на ткани, до появления сопротивления ткани, захваченной между браншами (42, 44). Естественно, можно реализовать любой другой способ поэтапного продвижения.
В данном примере закраина (62) установлена так, чтобы отводить наклонную поверхность на ближнем конце бранши (44) для открытия бранши (42) при втягивании режуще-сшивающего элемента (60) в проксимальное положение, и удерживания бранши (42) открытой, пока режуще-сшивающий элемент (60) остается в проксимальном положении. Эта функциональность может позволить использовать концевой эффектор (40) для отделения слоев ткани, тупого разделения тканей и т.д. путем разведения браншей (42, 44) из закрытого положения. В некоторых вариантах бранши (42, 44) по умолчанию упруго выводятся в открытое положение с помощью пружины или другого упругого приспособления. Хотя в текущем примере бранши (42, 44) закрываются или открываются в результате продольного перемещения режуще-сшивающего элемента (60), следует иметь в виду, что в других вариантах бранши (42, 44) могут двигаться независимо от режуще-сшивающего элемента (60). В качестве примера, через стержень (30) может проходить один или несколько кабелей, стержней, штанг и других приспособлений, выборочно приводящих в движение бранши (42, 44) независимо от режуще-сшивающего элемента (60). Такое движение браншей (42, 44) может отдельно контролировать специальное приспособление на рукоятке (20). Кроме того, такое движение браншей может контролироваться с помощью спускового крючка (24), помимо управления спусковым крючком (24) режуще-сшивающим элементом (60). Следует также иметь в виду, что режуще-сшивающий элемент (60) может упруго возвращаться в проксимальное положение, так что режуще-сшивающий элемент (60) проксимально втягивается после освобождения спускового крючка (24) пользователем.
D. Пример операции
При обычном использовании концевой эффектор (40) вводится в тело пациента через троакар. Шарнирная часть (36) по существу выпрямляется после того, как концевой эффектор (40) и часть стержня (30) вставляются через троакар. Затем хирург может манипулировать элементом управления шарнирным механизмом (28), чтобы повернуть или согнуть шарнирную часть (36) стержня (30), чтобы привести концевой эффектор (40) в нужное положение и ориентацию по отношению к анатомической структуре организма пациента. Затем между браншами (42, 44) захватывают два слоя ткани анатомической структуры путем нажатия на крючок (24) в сторону пистолетной рукоятки (22). Такие слои ткани могут быть частью того же естественного просвета, определяющего анатомическую структуру (например, кровеносного сосуда, части желудочно-кишечного тракта, части репродуктивной системы и т.д.) у пациента. Например, один слой ткани может заключать верхнюю часть кровеносного сосуда, а другой слой ткани может заключать нижнюю часть этого кровеносного сосуда, вдоль того же продольного сечения кровеносного сосуда (например, чтобы путь жидкости через кровеносный сосуд до использования электрохирургического инструмента (10) был перпендикулярен продольной оси, определяемой концевым эффектором (40) и т.д.). Иными словами, по длине бранши (42, 44) могут быть ориентированы перпендикулярно (или, по крайней мере, в целом поперек) кровеносных сосудов. Как отмечалось выше, закраины (62, 66) позволяют повернуть браншу (42) к бранше (44) при дистальном приведении в действие режуще-сшивающего элемента (60) путем прижатия спускового крючка (24) к рукоятке (22).
После того, как слои ткани захвачены между браншами (42, 44) режуще-сшивающий элемент (60) продолжает двигаться дистально по мере того, как пользователь прижимает крючок (24) к рукоятке (22). По мере того, как режуще-сшивающий элемент (60) продвигается дистально, дистальное лезвие (64) одновременно разрезает зажатые слои ткани, в результате чего отделенные части верхнего слоя налагаются на соответствующие отделенные части нижнего слоя. В некоторых вариантах в результате кровеносный сосуд оказывается разрезанным в направлении, которое в целом поперечно его длине. Следует иметь в виду, что наличие закраин (62, 66) непосредственно над и под браншами (42, 44), соответственно, может способствовать удержанию браншей (42, 44) в закрытом, плотно сжимающем положении. В частности, закраины (62, 66) могут способствовать поддержанию значительного сжимающего усилия между браншами (42, 44). Когда отсоединенные слои ткани сжаты между браншами (42, 44), электродные поверхности (50, 52) активируются биполярной радиочастотной энергией при нажатии пользователем кнопки активации (26). В некоторых вариантах электроды (50, 52) выборочно подключаются к источнику питания (80) (например, при нажатии пользователем кнопки (26) и т.д.), так что электродные поверхности (50, 52) браншей (42, 44) активируются с одинаковой полярностью, а стержень-активатор (60) активируется с другой полярностью, противоположной первой. Таким образом, между режуще-сшивающим элементом (60) и электродными поверхностями (50, 52) браншей (42, 44) через сжатые участки разъединенного слоя ткани идет биполярный РФ ток. В некоторых других вариантах полярность электродной поверхности (50) противоположна полярности электродной поверхности (52) и режуще-сшивающего элемента (60). В любом варианте (среди, по крайней мере, некоторых других), биполярная радиочастотная энергия, поставляемая источником питания (80), в итоге термически сваривает части слоя ткани с одной стороны режуще-сшивающего элемента (60) и части слоя ткани с другой стороны режуще-сшивающего элемента (60).
При определенных обстоятельствах тепло, передаваемое активированными электродными поверхностями (50, 52) может денатурировать коллаген в некоторых участках слоя ткани, а под сжимающим давлением браншей (42, 44) денатурированный коллаген может образовать уплотнение в некоторых участках слоя ткани. Таким образом, обрезанные окончания естественного просвета, ограничивающего анатомическую структуру, гемостатически закупориваются, так что из обрезанных концов не вытекают физиологические жидкости. В некоторых вариантах электродные поверхности (50, 52) могут быть активированы биполярной радиочастотной энергией, прежде чем режуще-сшивающий элемент (60) даже начинает перемещаться дистально, а значит, прежде чем ткань будет разъединена. Например, такая последовательность может использоваться в версиях, где кнопка (26) служит механической блокировкой для спускового крючка (24), помимо функции переключателя между источником питания (80) и электродными поверхностями (50, 52).
Хотя некоторые приведенные ниже инструкции описаны как варианты электрохирургического инструмента (10), следует иметь в виду, что некоторые приведенные ниже инструкции могут также применяться в других типах устройств. В качестве примера можно добавить, что помимо легкого применения в электрохирургическом инструменте (10), различные приведенные ниже инструкции можно легко применять в устройствах, описанных в любом из упоминаемых здесь документов, других типах электрохирургических устройств, хирургических сшивателях, хирургических клипсонакладывателях, эффекторах для ткани и прочих других устройствах. Другие подходящие устройства, в которых можно применять приведенные ниже инструкции, очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
II. Примеры конфигураций шарнирного сочленения
Шарнирная часть (36) стержня (30) может принимать различные формы. Только в качестве примера, шарнирную часть (36) можно реализовать в соответствии с одной или несколькими инструкциями, представленными в заявке на патент США № [АДВОКАТСКИЙ РЕЕСТР № END6889USNP], озаглавленной «Элементы шарнирного сочленения для шарнирного хирургического устройства», зарегистрированной на ту же дату, что и данная заявка, и включенную в нее посредством ссылки. Только в качестве еще одного примера, шарнирную часть (36) можно реализовать в соответствии с одной или несколькими инструкциями, представленными в заявке на патент США № [АДВОКАТСКИЙ РЕЕСТР № END6889USNP1], озаглавленной «Элементы шарнирного сочленения для шарнирного хирургического устройства», зарегистрированной на ту же дату, что и данная заявка, и включенную в нее посредством ссылки. Кроме того, шарнирная часть может быть реализована в соответствии с инструкциями, приведенными, по крайней мере, в одном из документов, на которые ссылается настоящий документ. Различные другие подходящие формы таких шарнирных частей (36) очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
III. Примеры конфигураций элемента управления шарнирным механизмом
Как отмечалось выше, в некоторых версиях рукоятка (20) включает элемент управления шарнирным механизмом (28), который предназначен для управления шарнирной частью (36) стержня (30), позволяющей выборочно определять положение концевого эффектора (40) под различными углами относительно продольной оси, определяемой кожухом (32). Несколько примеров форм элемента управления шарнирным механизмом (28) и прочих компонентов рукоятки (20) подробнее описаны ниже, а другие примеры очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Только в качестве примера некоторые чисто иллюстративные примеры альтернативных вариантов реализации элемента управления шарнирным механизмом (28) представлены в заявке на патент США № [АДВОКАТСКИЙ РЕЕСТР № END6888USNP], озаглавленной «Элементы управления для шарнирного хирургического устройства», зарегистрированной на ту же дату, что и данная заявка, и включенную в нее посредством ссылки.
A. Пример элемента управления шарнирным механизмом со спусковым крючком, поворачивающимся по продольной оси
На фиг. 5A-5C показан пример электрохирургического инструмента (100), содержащего рукоятку (120), стержень (130), выступающий дистально от рукоятки (120), и концевой эффектор (140), расположенный на дистальном конце стержня (130). Рукоятка (120) в настоящем примере включает пистолетную рукоятку (122), спусковой крючок (124) и кнопку активации (126). Спусковой крючок (124) может поворачиваться как в сторону пистолетной рукоятки (122), так и от нее, выборочно приводя в действие концевой эффектор (140), как описано выше, и, как описано в одном или нескольких документах, на которые ссылается настоящая заявка. Кнопка активации (126) позволяет выборочно активировать радиочастотные цепи, сообщающиеся с концевым эффектором (140), как описано выше, и, как описано в одном или нескольких документах, на которые ссылается настоящая заявка. В некоторых версиях кнопка активации (126) также позволяет механически блокировать спусковой крючок (124), чтобы его нельзя было полностью привести в действие, если одновременно не нажата кнопка (126). Примеры реализации блокировки представлены в ряде документов, на которые ссылается настоящая заявка. Следует иметь в виду, что рукоятку (122), спусковой крючок (124) и кнопку (126) можно модифицировать, заменять, дополнять и т.д. любым подходящим способом, а описания этих компонентов в настоящем документе служат только в качестве иллюстрации. Спусковой крючок (124) в данном примере выполнен с возможностью выборочного управления шарнирным сочленением (136) стержня (130), как подробнее описано ниже.
Стержень (130) в настоящем примере включает шарнирное сочленение (136), шарнирно соединяющее концевой эффектор (140) со стержнем (130). Шарнирное сочленение (136) в настоящем примере реализовано с возможностью выборочно размещать концевой эффектор (140) под различными углами относительно определяемой стержнем (130) продольной оси. Различные примеры форм шарнирного сочленения (136) и прочих компонентов стержня (130) также описаны в различных упоминаемых здесь документах, а другие примеры очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Точно так же, концевой эффектор (140) можно настроить в соответствии с описанным выше концевым эффектором (40), в соответствии с информацией из различных цитируемых здесь источников, или любым другим подходящим способом, очевидным специалисту в данной области в контексте изложенной в данной заявке информации.
В некоторых вариантах стержень (130) также можно поворачивать с помощью ручки (134) вокруг продольной оси, определяемой стержнем (130), по отношению к рукоятке (120). При этом концевой эффектор (140) и стержень (130) могут поворачиваться одновременно. В некоторых других версиях ручка (134) позволяет вращать концевой эффектор (140) без поворота какой-либо части стержня (130), находящейся рядом с шарнирным сочленением (136). В другом наглядном примере электрохирургический инструмент (100) может включать элемент управления вращением, позволяющий вращать стержень (130) и концевой эффектор (140) как единое целое; а также другой элемент управления, обеспечивающий вращение концевого эффектора (140) без вращения какой-либо части стержня (130), находящейся рядом с шарнирным сочленением (136). Другие применимые возможности вращения очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Естественно, при необходимости, возможность вращения можно полностью исключить. В вариантах устройства, где обеспечивается вращение стержня (130) или концевого эффектора (140), на поворотной ручке (134), на стержне (130) или на концевом эффекторе (140) может быть размещена одна или несколько отметок, облегчающих визуальную идентификацию положения относительно оси вращения. Например, пользователь может совмещать отметки на поворотной ручке (134) с соответствующими отметками на стержне (130) или на концевом эффекторе (140), чтобы лучше видеть ориентацию этих элементов по отношению к пациенту и инструменту (100).
Как отмечалось выше, спусковой крючок (124) может выборочно поворачивать концевой эффектор (140). В частности, спусковой крючок (124) соединен с концевым эффектором (140) таким образом, что вращение спускового крючка (124) латерально по вертикальной оси, например, вертикальной оси, определяемой пистолетной рукояткой (122), приводит к поворачиванию концевого эффектора (140) на шарнирном сочленении (136). Эта операция показана на серии фиг. 5А-5С, где спусковой крючок (124) поворачивается вокруг вертикальной оси, чтобы концевой эффектор (140) повернулся на шарнире (136). Таким образом, следует иметь в виду, что спусковой крючок (124) выборочно поворачивается к вертикальной оси, например, вертикальной оси, определяемой пистолетной рукояткой (122), и от нее (для приведения в действие концевого эффектора (140)); а также выборочно поворачивается по вертикальной оси, например, вертикальной оси, определяемой пистолетной рукояткой (122), (для поворачивания концевого эффектора на шарнире (140)).
Есть множество способов для соединения спускового крючка (124) с концевым эффектором (140), позволяющих обеспечить поворот концевого эффектора (140) на шарнире (136) при вращении спускового крючка (124) по вертикальной оси. Например, от рукоятки (120), связанной со спусковым крючком (124), через стержень (130) до концевого эффектора (140) могут проходить два удлиненных элемента (не показаны). Эти удлиненные элементы могут перемещаться в противоположных направлениях, так, что концевой эффектор (140) поворачивается на шарнире (136), когда один удлиненный элемент выдвигается дистально, а другой удлиненный элемент втягивается проксимально. Кроме того или в альтернативном варианте, шарнирное соединение между спусковым крючком (124) и концевым эффектором (140) может включать в себя один или несколько храповиков, так что пользователь может латерально поворачивать спусковой крючок (124) несколько раз, чтобы поворачивать концевой эффектор (140) постепенно. В некоторых таких вариантах спусковой крючок (124) упругим усилием возвращается в исходное положение, показанное на фиг. 5А, так, что пользователь может просто несколько раз нажимать и отпускать спусковой крючок (124), чтобы управлять концевым эффектором (140) при помощи храпового механизма. Может использоваться разъединяющий механизм, упруго смещающий концевой эффектор (140) в исходное положение, показанное на фиг. 5А, который может активироваться (например, посредством кнопки, и т.д.), чтобы расцепить концевой эффектор (140) от спускового крючка (124), когда пользователь желает выпрямить концевой эффектор (140). Следует также иметь в виду, что концевой эффектор (140) может поворачиваться на шарнире (136) в том же направлении, в котором спусковой крючок (124) поворачивается вокруг вертикальной оси; или концевой эффектор (140) может поворачиваться на шарнире (136) в противоположном направлении. Другие подходящие способы соединения спускового крючка (124) с концевым эффектором (140) для шарнирного управления очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
В некоторых вариантах спусковой крючок (124) может поворачиваться вокруг вертикальной оси только тогда, когда спусковой крючок (124) поворачивается от пистолетной рукоятки (122), то есть, спусковой крючок (124) не может поворачиваться по вертикальной оси после того, как пользователь начал прижимать крючок (124) к пистолетной рукоятке (122). Различные приемлемые способы реализации представленной здесь функциональности очевидны специалистам в данной области в контексте изложенной в данной заявке информации. В другом варианте для иллюстрации переключатель режимов или другое приспособление может выборочно позволять спусковому крючку (124) поворачиваться к пистолетной рукоятке (122) и от нее, либо поворачиваться по вертикальной оси, но не в обоих направлениях одновременно. Другие подходящие компоненты, приспособления, конфигурации и функциональности электрохирургического инструмента (100) очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
B. Пример шарнирного механизма управления с противоположными кулачковыми муфтами
На фиг. 6-15 показаны дополнительные примеры компонентов, которые можно использовать для обеспечения поворота концевого эффектора (240) в шарнирной части (236) стержня (230). В этом примере стержень (230) прикреплен к рукоятке (220) и включает внешний кожух (232).В этом примере шарнирная часть (236) реализована в виде винтового выреза в кожухе (232), но следует иметь в виду, что шарнирная часть (236) может быть реализована согласно любой из инструкций, изложенных здесь или в одном из цитируемых здесь документов. Кроме того, хотя на фиг. 13А-14В показана только часть рукоятки (220), следует иметь в виду, что рукоятка (220) может быть реализована согласно любой из инструкций, изложенных здесь или в одном из цитируемых здесь документов. В данном примере два удлиненных элемента для регулировки изгиба (250, 252) проходят через кожух (232) и могут двигаться внутри него. Как подробнее описано ниже, элементы для регулировки изгиба (250, 252) могут перемещаться в противоположных направлениях, чтобы шарнирная часть (236) выборочно сгибалась к продольной оси, определяемой стержнем (230), или от нее.
Как лучше всего видно на фиг. 7-8 через шарнирную часть (236) параллельно с режуще-сшивающим элементом (206) проходят два стержня (254, 256). Режуще-сшивающий элемент (206) функционально эквивалентен описанному выше режуще-сшивающему элементу (60). Таким образом, следует иметь в виду, что режуще-сшивающий элемент (206) может перемещаться внутри стержня (230) и шарнирной части (236) для приведения в действие концевого эффектора (240). В данном примере стержни (254, 256) жестко закреплены в шарнирной части (236) так, что стержни (254, 256) сгибаются с шарнирной частью (236), а режуще-сшивающий элемент (206) перемещается по отношению к стержням (254, 256). Стержни (254, 256) обеспечивают структурную поддержку шарнирной части (236), особенно, когда шарнирная часть (236) находится в прямой конфигурации; однако стержни (254, 256) не оказывают чрезмерного сопротивления сгибанию шарнирной части (236). Стержни (254, 256) также обеспечивают боковую поддержку режуще-сшивающему элементу (206), не позволяя режуще-сшивающему элементу (206) прогибаться или выклиниваться в рамках шарнирной части (236), особенно, когда режуще-сшивающий элемент (206) продвигается дистально под нагрузкой, а шарнирная часть (236) и режуще-сшивающий элемент (206) находятся в согнутой конфигурации. Конечно, можно использовать и любые другие подходящие структуры или конфигурации.
Как можно также видеть на фиг. 7, через шарнирную часть (236) проходит провод (251). Провод (251) также проходит через оставшуюся часть стержня (230) и обеспечивает электрическую связь между концевым эффектором (240) и источником питания. Провод (251) является гибким, таким образом, провод (251) может гнуться вместе с шарнирной частью (236).
Как показано на фиг. 9, кожух (232) включает отверстие (238), через которое видна проксимальная часть элемента для регулировки изгиба (250). Хотя это не показано, на диаметрально противоположной стороне кожуха (232) расположено аналогичное отверстие, через которое видна проксимальная часть элемента для регулировки изгиба (252). Как показано на фиг. 8 и 10-11, первый кулачковый элемент (260) жестко крепится к первому элемента для регулировки изгиба (250) через отверстие (238); а второй кулачковый элемент (262) жестко закреплен на втором элементе для регулировки изгиба (252) через другое отверстие. Кулачковый элемент (260) включает дистальный выступающий элемент (264) и проксимальный выступающий элемент (268). Хотя это не показано, кулачковый элемент (262) включает аналогичные выступающие элементы. Оба кулачковых элемента (260, 262) могут перемещаться продольно вдоль кожуха (232) и относительно друг друга. В частности, как подробнее будет описано ниже, кулачковые элементы (260, 262) движутся продольно в противоположных направлениях для перемещения шарнирных элементов (250, 252) в противоположных направлениях продольно по отношению к кожуху (232), для выборочного сгибания шарнирной части (236). При том, что кулачковые элементы (260, 262) могут по-разному перемещаться по отношению к кожуху (232), в данном примере кулачковые элементы (260, 262) вращаются унитарно с кожухом (232).
Как показано на фиг. 11-12, кулачковая гайка (270) расположена соосно вокруг кулачковых элементов (260, 262) и кожуха (232). Кулачковая гайка (270) определяет внутреннюю полость (272) для размещения кулачковых элементов (260, 262) и включает дистальную скошенную поверхность камеры (274) и проксимальную скошенную поверхность (276). Скошенные поверхности (274, 276) параллельны друг другу и расположены под углом к продольной оси кожуха (232). Скошенные поверхности (274, 276) расположены так, чтобы соприкасаться с выступающими частями (264, 268) кулачковых элементов (260, 262). Кулачковая гайка (270) может вращаться вокруг кожуха (232), но не перемещаться по отношению к кожуху (232). Следует иметь в виду, что, когда кулачковая гайка (270) поворачивается относительно кулачковых элементов (260, 262) или наоборот, скошенные поверхности (274, 276) упираются в выступающие элементы (264, 268) кулачковых элементов (260, 262), чтобы продольно передвинуть кулачковые элементы (260, 262) в противоположных направлениях. Перемещение кулачковых элементов (260, 262), соответственно, приводит к перемещению элементов для регулировки изгиба (250, 252) в продольно противоположных направлениях. Например, кулачковая гайка (270), вращающаяся в одном направлении по отношению к кулачковым элементам (260, 262), вызывает одновременное дистальное перемещение элемента для регулировки изгиба (250) и проксимальное перемещение элемента для регулировки изгиба (252). Вращение кулачковой гайки (270), в противоположном направлении по отношению к кулачковым элементам (260, 262), вызывает одновременное проксимальное перемещение элемента для регулировки изгиба (250) и дистальное перемещение элемента для регулировки изгиба (252). Кроме того, следует иметь в виду, что перемещение элементов для регулировки изгиба (250, 252) в противоположных направлениях приводит к сгибанию шарнирной части (236). Пример относительного вращения кулачковой гайки (270) и кулачковых элементов (260, 262) под воздействием элементов подробнее описан ниже, а другие примеры очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
Как показано на фиг. 13А-13B, на проксимальной части (271) кулачковой гайки (270) соосно размещается стопорное кольцо (296). Стопорное кольцо (296) может перемещаться по отношению к кулачковой гайке (270). Хотя кулачковая гайка (270) может вращаться внутри стопорного кольца (296), структура рукоятки (220) зацепляется с выдающимися наружу вкладками (298) стопорного кольца (296), предотвращая тем самым вращение стопорного кольца (296) по отношению к рукоятке (220). Как лучше всего видно на фиг. 13B, стопорное кольцо (296) включает набор проксимально выдающихся внутренних шпонок (297).
Кроме того, как показано на фиг. 13А-13B, дистальный стопор стержня (290) расположен дистальнее кулачковой гайки (270), а проксимальный стопор стержня (292) расположен проксимальнее кулачковой гайки (270). Дистальный стопор стержня (290) зафиксирован на дистальной засечке (237) кожуха (232), показанной на фиг. 9-11. Проксимальный стопор стержня (292) зафиксирован на проксимальной засечке (239) кожуха (232), также показанной на фиг. 9-11. Таким образом, стопоры стержня (290, 292) зафиксированы по отношению к кожуху (232). Дистальный стопор стержня (290) включает набор проксимально выступающих внешних шпонок (294). Проксимальный стопор стержня (292) включает набор дистально выступающих внешних шпонок (294). Внешние шпонки (294) проксимального стопора стержня (292) позволяют выборочно переплетаться и сцепляться с внутренними шпонками (297) стопорного кольца (298), как подробнее описано ниже. Следует также иметь в виду, что фиксированное расстояние между стопорами стержня (290, 292) установлено таким образом, что стопоры стержня (290, 292) не позволяют кулачковой гайке (270) передвигаться по отношению к кожуху (232). Кроме того, хотя в данном примере стопоры стержня (290, 292) и кулачковая гайка (270) могут выборочно вращаться внутри рукоятки (220), структура рукоятки (220) не позволяет стопорам стержня (290, 292) и кулачковой гайке (270) перемещаться по отношению к рукоятке (220).
Как показано на фиг. 13А-14B, на дистальном конце рукоятки (220) закреплен ротатор (280). Ротатор (280) может вращаться по отношению к рукоятке (220) и перемещаться по отношению к рукоятке (220) от дистальной позиции (фиг. 13A и 14A) до проксимальной позиции (фиг. 13B и 14B). Как лучше всего видно на фиг. 15, ротатор (280) включает пару кольцевых угловых углублений (282) и кольцевое квадратное углубление (286). Углубления (282) предназначены для того, чтобы выборочно зацепляться с упругим фиксатором (222) рукоятки (220), в существенной степени поддерживая продольное положение ротатора (280) по отношению к рукоятке (220). В углубление (286) входят выступы (298) стопорного кольца (296). Размеры углубления (286) позволяют ротатору (280) свободно вращаться по отношению к стопорному кольцу (296).При этом, взаимосвязь между углублением (286) и выступом (298) заставляет стопорное кольцо (296) перемещаться продольно вместе с ротатором (280). Как подробнее описано ниже, ротатор (280) приводит внутренние шпонки (297) стопорного кольца (296) в зацепление с внешними шпонками (294) стопора стержня (292), когда ротатор (280) переходит в проксимальное положение (фиг. 13B и 14B). Ротатор (280) выводит внутренние шпонки (297) стопорного кольца (296) из зацепления с внешними шпонками (294) стопора стержня (292), когда ротатор (280) переходит в дистальное положение (фиг. 13A и 14A).
Ротатор (280) также включает ряд дистально ориентированных внутренних шпонок (284), выступающих от полки (285). Полка (285) расположена в соответствующем углублении (278), образованном в кулачковой гайке (270). Полка (285) и углубления (278) устроены так, что полка (285) остается в углублении (278) независимо от того, находится ли ротатор (280) в дистальном положении (фиг. 13A и 14A) или в проксимальном положении (фиг. 13B и 14B). Кроме того, полка (285) и углубление (278) устроены так, что их зацепление обеспечивает унитарное вращение ротатора (280) и кулачковой гайки (270). Другими словами, кулачковая гайка (270) вращается с ротатором (280) независимо от того, находится ли ротатор (280) в дистальном положении (фиг. 13A и 14A) или в проксимальном положении (фиг. 13B и 14B).
Ротатор (280) в настоящем примере может выборочно вращать стержень (230) или сгибать шарнирную часть (236) для сгибания концевого эффектора (240), в зависимости от продольного положения ротатора (280) по отношению к рукоятке (220), когда ротатор (280) поворачивается по отношению к рукоятке (220). В частности, ротатор (280) позволяет вращать стержень (230) по отношению к рукоятке (220), не сгибая шарнирную часть (236), когда ротатор (280) поворачивается в дистальном положении, как показано на фиг. 13А и 14А. Ротатор (280) позволяет сгибать шарнирную часть (230) по отношению к рукоятке (236), не вращая стержень (220), когда ротатор (280) поворачивается в проксимальном положении, как показано на фиг. 13B и 14B.
Как показано на фиг. 13A и 14A, когда ротатор (280) находится в дистальном положении, внутренние шпонки (284) ротатора (280) зацепляются с внешними шпонками (294) стопора стержня (290). Кроме того, стопорное кольцо (296) находится в дистальном положении, когда ротатор (280) находится в дистальном положении, так что внутренние шпонки (297) стопорного кольца (296) расцепляются с внешними шпонками (294) стопора стержня (292). Таким образом, стопорное кольцо (296) не препятствует стопору стержня (292) или кожуху (232) поворачиваться по отношению к рукоятке (220). Когда шпионки (284, 294) зацеплены, а стопор стержня (292) может свободно поворачиваться по отношению к рукоятке (220), при вращении ротатора (280) кожух (232) и концевой эффектор (240) поворачиваются по отношению к рукоятке (220). Кроме того, так как полка (285) расположена в углублении (278) кулачковой гайки (270), при вращении ротатора (280) кулачковая гайка (270) также поворачивается. Таким образом, кулачковая гайка (270) и кожух (232) поворачиваются вместе с ротатором (280), когда ротатор (280) находится в дистальном положении. Кулачковые элементы (260, 262) и шарнирные элементы (250) также поворачиваются с кожухом (232) (и кулачковой гайкой (270)) благодаря взаимодействию между кулачковыми элементами (260, 262) и кожухом (232). Так как кулачковая гайка (270) и кулачковые элементы (260, 262) поворачиваются вместе, когда ротатор (280) находится в дистальном положении, шарнирная часть (236) не сгибается при вращении ротатора (280) в дистальном положении. Таким образом, когда ротатор (280) находится в дистальном положении, ротатор (280) можно использовать для вращения всего стержня (230) и концевого эффектора (240) без сгибания шарнирной части (236).Следует иметь в виду, что диапазон угла вращения может составлять вплоть до 360° и более.
Как показано на фиг. 13B и 14B, когда ротатор (280) находится в проксимальном положении, внутренние шпонки (284) ротатора (280) расцепляются с внешними шпонками (294) стопора стержня (290). Кроме того, стопорное кольцо (296) находится в проксимальном положении, когда ротатор (280) находится в проксимальном положении, так что внутренние шпонки (297) стопорного кольца (296) зацепляются с внешними шпонками (294) стопора стержня (292). Таким образом, стопорное кольцо (296) не позволяет стопору стержня (292) поворачиваться по отношению к рукоятке (220). Когда угловое положение стопора стержня (292) зафиксировано стопорным кольцом (296), а шпонки (284, 290) расцеплены, при вращении ротатора (280) кожух (232) не поворачивается, когда ротатор (280) находится в проксимальном положении. В действительности, взаимодействие между стопором стержня (292), стопорным кольцом (296) и корпусом (220) не позволит кожуху (232) поворачиваться по отношению к корпусу (220), когда ротатор (280) и стопорное кольцо (296) находятся в проксимальном положении. Тем не менее, ротатор (280) может свободно поворачиваться относительно рукоятки (220), а полка (285) остается в зацеплении с углублением (278) кулачковой гайки (270). То есть, при вращении ротатора (280) кулачковая гайка поворачивается (270) по отношению к рукоятке (220). Так как угловое положение кожуха (232) относительно рукоятки (220) на данном этапе фиксировано, угловое положение кулачковых элементов (260, 262) на данном этапе также фиксировано. Таким образом, на данном этапе, когда поворачивается ротатор (280), кулачковая гайка (270) поворачивается относительно кулачковых элементов (260, 262). Как отмечалось выше, благодаря зацеплению между кулачковыми поверхностями (274, 276) кулачковой гайки (270) и выступами (264, 268) кулачковых элементов (260, 262), при относительном вращении кулачковые поверхности (274, 276) могут упереться в выступы (264, 268) кулачковых элементов (260, 262) и развести кулачковые элементы (260, 262) и шарнирные элементы (250, 252) в противоположных продольных направлениях. Противоположно направленное продольное перемещение шарнирных элементов (250, 252) вызывает сгибание шарнирной части (236) и, как следствие, сгибание концевого эффектора (240). Таким образом, когда ротатор (280) находится в проксимальном положении, ротатор (280) можно использовать для вращения всего стержня (230) или концевого эффектора (240) без сгибания шарнирной части (236).
Трение в шарнирных элементах управления может существенно препятствовать случайному изгибу шарнирной части (236) при эксплуатации концевого эффектора (240), когда ротатор (280) находится в проксимальном положении, шарнирное управление становится по существу самозамыкающимся под нагрузкой. Когда ротатор (280) находится в дистальном положении, шарнирная часть (236) не находится в состоянии изгиба, так как угловое положение кулачковой гайки (270) по отношению к кулачковым элементам (260, 262) будет зафиксировано. Другие подходящие способы выборочной установки или фиксации шарнирных конфигураций очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
В некоторых вариантах ротатор (280) использует маркировку, обеспечивающую визуальную индикацию шарнирного угла, определяемого концевым эффектором (240) и стержнем (230).Такую маркировку можно рассматривать в совокупности с другой маркировкой на рукоятке (220). Кроме того или в качестве альтернативы, на ротаторе (280) может использоваться маркировка, обеспечивающая визуальное указание углового положения концевого эффектора (240). Такую маркировку можно также рассматривать в совокупности с другой маркировкой на рукоятке (220). Конечно, маркировка является необязательной и может просто не использоваться. В некоторых вариантах ротатором (280) можно управлять той же рукой, которая держит рукоятку (220) (например, одним пальцем), обеспечивая возможность манипулировать всем инструментом одной рукой. Еще в одном варианте иллюстративного характера рукоятка (220) может содержать переключатель режимов или другой тип приспособления, позволяющий выборочно переводить ротатор (280) из вращательного режима стержня (фиг. 13A и 14A) в шарнирный режим стержня (фиг. 13B и 14B). Другие подходящие компоненты, приспособления, конфигурации и функциональности очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
C. Примеры управления шарнирным механизмом с помощью поворотного клина
На фиг. 16-19 показан еще один пример электрохирургического инструмента (300), содержащего рукоятку (320), стержень (330), выступающий дистально от рукоятки (320), и концевой эффектор (340), расположенный на дистальном конце стержня (330). Рукоятка (320) в настоящем примере включает пистолетную рукоятку (322), спусковой крючок (324), кнопку активации (326) и поворотный клин (328). Спусковой крючок (324) может поворачиваться как в сторону пистолетной рукоятки (322), так и от нее, выборочно приводя в действие концевой эффектор (340), как описано выше, и, как описано в одном или нескольких документах, на которые ссылается настоящая заявка. Кнопка активации (326) позволяет выборочно активировать радиочастотные цепи, сообщающиеся с концевым эффектором (340), как описано выше, и, как описано в одном или или нескольких документах, на которые ссылается настоящая заявка. В некоторых версиях кнопка активации (326) также позволяет механически блокировать спусковой крючок (324), чтобы его нельзя было полностью привести в действие, если одновременно не нажата кнопка (326). Примеры реализации блокировки представлены в ряде документов, на которые ссылается настоящая заявка. Следует иметь в виду, что рукоятку (322), спусковой крючок (324) и кнопку (326) можно модифицировать, заменять, дополнять и т.д. любым подходящим способом, а описания этих компонентов в настоящем документе служат только в качестве иллюстрации. Поворотный клин (328) в данном примере выполнен с возможностью выборочного контроля шарнирной части (336) стержня (330), как подробнее описано ниже.
Стержень (330) в настоящем примере включает внешний кожух (332), шарнирную часть (336) на дистальном конце кожуха (332) и трубку привода режущего элемента (338), соосно расположенную внутри кожуха (332) с возможностью скольжения. Приводная трубка режущего элемента (338) может перемещаться продольно, чтобы передвигать в продольном направлении режущий элемент (не показан). Режущий элемент по существу эквивалентен описанному выше режуще-сшивающему элементу (60). В данном примере приводная трубка (338) продвигается дистально путем прижатия спускового крючка (324) к пистолетной рукоятке (322); приводная трубка (338) возвращается проксимально путем освобождения спускового крючка (324) или активного перемещения спускового крючка (324) в направлении от пистолетной рукоятки (322). Как показано на фиг. 17-19, в данном примере к проксимальному концу приводной трубки (338) крепится пружина (342). Пружина (342) вступает в зацепление с кронштейном (344), жестко закрепленным на рукоятке (320). Таким образом, пружина (342) упруго возвращает приводную трубку (338) в проксимальное положение. Конечно, приводная трубка (338) и режущий элемент может быть реализован и эксплуатироваться любым другим подходящим образом.
Шарнирная часть (336) в настоящем примере реализована с возможностью выборочно размещать концевой эффектор (340) под различными углами относительно определяемой кожухом (332) продольной оси. Различные примеры форм шарнирной части (336) и прочих компонентов стержня (330) также описаны в различных упоминаемых здесь документах, а другие примеры очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Точно так же, концевой эффектор (340) можно настроить в соответствии с описанным выше концевым эффектором (40), в соответствии с информацией из различных цитируемых здесь источников, или любым другим подходящим способом, очевидным специалисту в данной области в контексте изложенной в данной заявке информации.
В некоторых вариантах стержень (330) также можно поворачивать относительно рукоятки (320) вокруг продольной оси, определяемой кожухом (332), с помощью ручки (334). При этом концевой эффектор (340) и стержень (330) могут поворачиваться одновременно. В некоторых других версиях ручка (334) позволяет вращать концевой эффектор (340) без поворота какой-либо части стержня (330), находящейся рядом с шарнирной частью (336). В другом наглядном примере электрохирургический инструмент (300) может включать контрольный механизм вращения, позволяющий вращать стержень (330) и концевой эффектор (340) как единое целое; а также другой контрольный механизм, обеспечивающий вращение концевого эффектора (340) без вращения какой-либо части стержня (330), находящейся рядом с шарнирной частью (336). Другие применимые возможности вращения очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Естественно, при необходимости, возможность вращения можно полностью исключить. В вариантах устройства, где обеспечивается вращение стержня (330) или концевого эффектора (340), на поворотной ручке (334), на стержне (330) или на концевом эффекторе (340) может быть размещена одна или несколько отметок, облегчающих визуальную идентификацию положения относительно оси вращения. Например, пользователь может совмещать отметки на поворотной ручке (334) с соответствующими отметками на стержне (330) или на концевом эффекторе (340), чтобы лучше видеть ориентацию этих элементов по отношению к пациенту и инструменту (300).
Как показано на фиг. 17-18, поворотный выступ (329) располагается на поворотном клине (328) унитарно и дистально. Выступ (329) подвижно закреплен на рукоятке (320) так, что поворотный клин (328) может поворачиваться вокруг вертикальной оси поворота, определяемой центром выступа (329). Эта вертикальная ось вращения перпендикулярна продольной оси, определяемой стержнем (330). Как показано на фиг. 18-19, нижняя поверхность поворотного клина (328) включает проксимально представленную интегральную рейку (329).
Вал трансмиссии (350) располагается под поворотным клином (328) и определяет ось вращения, перпендикулярную к оси, определяемой стержнем (330). Вал (350) может поворачиваться в пределах рукоятки (320). Вал (350) включает одиночную шестерню (352), зацепляющую интегральную рейку (329) поворотного клина (328). Таким образом, шестерня (352) поворачивается в ответ на боковое отклонение или вращение шарнирного клина (328) относительно рукоятки (320). Шестерня (352) входит в зацепление с парой противоположных реек (360, 362). Рейка (360) проходит в рукоятке (320) продольно и составляет единое целое с поперечным кронштейном (364); а рейка (362) проходит в рукоятке (320) продольно и составляет единое целое с поперечным кронштейном (366). Как лучше всего видно на фиг. 18-19, кронштейны (364, 366) расположены таким образом, что оба они пересекаются с продольной осью стержня (330) и располагаются на заданном расстоянии по длине продольной оси. Из вышеизложенного следует, что вращение шестерни (352) двигает рейки (360, 362) в противоположных продольных направлениях.
Кронштейн (364) соединен с лентой для управления шарнирным механизмом (374) посредством продольного паза (375), формируемого в трубке привода (338). Кронштейн (366) соединен с лентой для управления шарнирным механизмом (376) посредством продольного паза (377), формируемого в трубке привода (338). Ленты для управления шарнирным механизмом (374, 376) проходят через стержень (330) продольно в трубке привода (338). Ленты для управления изгибом (374, 376) связаны с шарнирной частью (336) так, что перемещение лент для управления шарнирным механизмом (374, 376) в противоположных продольных направлениях приводит к сгибанию шарнирной части (336) и, как следствие, повороту концевого эффектора (340). Как отмечалось выше, вращение шестерни (352) направляет рейки (360, 362) в противоположных продольных направлениях. Таким образом, следует иметь в виду, что вращение поворотного клина (328) в любом направлении относительно рукоятки (320) передвигает ленты для управления шарнирным механизмом (374, 376) в противоположных продольных направлениях, тем самым сгибая шарнирную часть (336) для поворота концевого эффектора (340). Например, вращение поворотного клина (328) в одном направлении перемещает ленту для управления шарнирным механизмом (374) в дистальном направлении и одновременно перемещает ленту для управления шарнирным механизмом (376) в проксимальном направлении, тем самым сгибая концевой эффектор (340) в одну сторону. Вращение поворотного клина (328) в противоположном направлении перемещает ленту для управления шарнирным механизмом (374) в проксимальном направлении и одновременно перемещает ленту для управления шарнирным механизмом (376) в дистальном направлении тем самым сгибая концевой эффектор (340) в другую сторону.
Как показано на фиг. 17, фиксирующий узел может выборочно удерживать поворотный клин (328) в различных повернутых положениях. В частности, проксимальный край поворотного клина (328) включает ряд углублений (380), предназначенных для введения шарика (382), упруго направляемого в углубления (380) пружиной (384). Пружина (384) может быть жестко закреплена в рукоятке (320). Другие подходящие способы выборочной фиксации положения поворотного клина (328) очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Конечно, элементы фиксации могут быть опущены при необходимости. Следует также иметь в виду, что поворотным клином (328) можно управлять одной рукой, в которой держится рукоятка (320) (например, при помощи большого пальца или другого пальца), что обеспечивает управление всем инструментом (300) при помощи одной руки. Несколько примеров альтернативных элементов, функций, конфигураций и работоспособности инструмента (300) подробнее описаны ниже, а другие очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
На фиг. 20 показан пример альтернативы поворотному клину (328) и лентам для управления шарнирным механизмом (374, 376). В частности, на фиг. 20 показана пара шарнирных манипуляторов (410, 412), поворачивающихся вокруг цапфы (414), закрепленной на рукоятке (420). Манипуляторы (410, 412) включают соответствующие поперечные рейки (416, 418). Рейки (416, 418) переплетаются с соответствующими шестернями (456, 458), которые могут поворачиваться внутри рукоятки (420) такие, что в результате бокового движения реек (416, 418) шестерни (456, 458) поворачиваются. Каждая шестерня (456, 458) составляет единое целое с соответствующей катушкой (466, 468). На каждую катушку (476, 478) наматывается кабель (476, 478) так, что при вращении катушки (466, 468) кабель (476, 478) сматывается или разматывается в зависимости от направления вращения. Кабели (476, 478) похожи на ленты для управления шарнирным механизмом (374, 376) в том, что движение кабелей (476, 478) вызывает поворот концевого эффектора. Таким образом, поворотные шарнирные манипуляторы (410, 412) по бокам перемещают кабели (476, 478) в продольном направлении, поворачивая концевой эффектор.
В данном примере, шарнирные манипуляторы (410, 412) могут двигаться независимо друг от друга. Таким образом, при поворачивании манипулятора (410) эффективная длина кабеля (476) сокращается, а манипулятор (412) не двигается, и эффективная длина кабеля (478) не изменяется, в результате чего концевой эффектор сгибается к манипулятору (410). При вращении манипулятора (412) возникает противоположный результат. В некоторых других вариантах кабель (478) наматывается на катушку (458) в направлении противоположном кабелю (476), намотанному на катушку (456), а шарнирные манипуляторы (410, 412) поворачиваются вместе. Другие применимые конструкции очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Следует иметь в виду, что другие компоненты, приспособления, конфигурации и функциональности инструмента (300), описанные выше, могут легко сочетаться с компонентами, функциями и конфигурациями, показанными на фиг. 20. Следует также понимать, что компоненты, приспособления и конфигурации, показанные на фиг. 20, можно изменять, заменять, дополнять или не использовать по желанию.
На фиг. 22 показан еще один пример альтернативы поворотному клину (328) и лентам для управления шарнирным механизмом (374, 376). В частности, на фиг. 22 показан поворотный клин (528), шарнирно закрепленный на рукоятке (520) вертикальной цапфой (510). Дистальный штифт (550) установлен вертикально на дистальном конце клина (328) и направлен вверх. Таким образом, когда клин (528) поворачивается вокруг цапфы (510), штифт (550) перемещается в угловом диапазоне движения. Пара кабелей (576, 578) крепятся к рукоятке (520) соответствующими пружинами (586, 588), которые держат кабели (576, 578) в натяжении. Кабели (476, 478) похожи на ленты для управления шарнирным механизмом (374, 376) в том, что движение кабелей (576, 578) вызывает изгибание концевого эффектора. Кабели (576, 578) расположены выше клина (528) и на пути движения штифта (550). Таким образом, если клин (528) поворачивается в одном направлении, штифт (550) зацепляет кабель (576) и протаскивает кабель (576) через стержень (530), сокращая эффективную длину кабеля (576). В результате сокращения эффективной длины кабеля (576) концевой эффектор на дистальном конце стержня (530) изгибается. Подобным же образом, если клин (528) поворачивается в противоположном направлении, штифт (550) зацепляет кабель (578) и протаскивает кабель (578) через стержень (530), сокращая эффективную длину кабеля (578). В результате сокращения эффективной длины кабеля (578) концевой эффектор на дальнем конце стержня (530) изгибается в направлении противоположном предыдущему сценарию.
Кроме того, как показано на фиг. 22 (596, 598) штифты (550) установлены вертикально на кожухе (520) выше клина (528) и направлены вниз. Кабель (576) оборачивается один раз около штифта (596), а кабель (578) оборачивается один раз около штифта (598). Кабели (576, 578) могут скользить вдоль штифтов (596, 598), а их зацепление со штифтами (596, 598) обеспечивает выравнивание проксимальных концов кабелей (576, 578) и предотвращает внешнее отклонение пружин (586, 588), когда любой из кабелей (576) зацепляет штифт (550). В некоторых других вариантах штифты (596, 598) являются неотъемлемой частью клина (528) и взаимодействуют со штифтом (550) для изменения эффективной длины кабелей (576, 578), при вращении клина (528) вокруг цапфы (510). В некоторых вариантах штифт (550) можно не использовать, заменяя его только штифтами (596, 598), являющимися неотъемлемой частью клина (528). В качестве еще одной альтернативы для иллюстрации штифты (596, 598) можно не использовать, заменяя их только штифтом (550). Другие применимые конструкции очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Следует иметь в виду, что другие компоненты, приспособления, конфигурации и функциональности инструмента (300), описанные выше, могут легко сочетаться с компонентами, функциями и конфигурациями, показанными на фиг. 22. Следует также понимать, что компоненты, приспособления и конфигурации, показанные на фиг. 22, можно изменять, заменять, дополнять или не использовать по желанию.
На фиг. 23 показан пример поворотного клина (628), расположенного в ручке вращения стержня (634). Клин (628) можно поворачивать относительно ручки (634), как описано выше. Клин (628) также может изгибать концевой эффектор, как описано в данной заявке. Ручка (634) может быть вращающейся, чтобы поворачивать стержень (630) относительно рукоятки (620). Таким образом, клин (628) также может поворачиваться с ручкой (634) и стержнем (630). Следует иметь в виду, что другие компоненты, приспособления, конфигурации и функциональности инструмента (300), описанные выше, могут легко сочетаться с компонентами, функциями и конфигурациями, показанными на фиг. 23. Следует также понимать, что компоненты, приспособления и конфигурации, показанные на фиг. 23, можно изменять, заменять, дополнять или не использовать по желанию.
На фиг. 24 показан еще один пример альтернативы шарнирному клину (328) и лентам для управления шарнирным механизмом (374, 376). В частности, на фиг. 24 показан вариант инструмента, изображенного на фиг. 20, только для иллюстрации. Пара шарнирных манипуляторов (710, 712) может вращаться вокруг цапфы (714), закрепленной на рукоятке (720). Манипуляторы (710, 712) включают соответствующие поперечные рейки (716, 718). Рейки (716, 718) переплетаются с соответствующими шестернями (756, 758), которые могут поворачиваться внутри рукоятки (720) такие, что в результате бокового движения реек (716, 718) шестерни (756, 758) поворачиваются. Каждая шестерня (756, 758) составляет единое целое с соответствующей катушкой (766, 768). На каждую катушку (776, 778) наматывается кабель (776, 778) так, что при вращении катушки (766, 768) кабель (766, 768) сматывается или разматывается в зависимости от направления вращения. Кабели (776, 778) похожи на ленты для управления шарнирным механизмом (774, 776) в том, что движение кабелей (776, 778) через стержень (730) вызывает поворот концевого эффектора (740) на шарнирном сочленении (736). Таким образом, при поворачивании шарнирных манипуляторов (710, 712) вбок кабели (776, 778) перемещаются в продольном направлении, поворачивая концевой эффектор (740) на шарнирном сочленении (736). Следует иметь в виду, что другие компоненты, приспособления, конфигурации и функциональности инструмента (300), описанные выше, могут легко сочетаться с компонентами, функциями и конфигурациями, показанными на фиг. 24. Следует также понимать, что компоненты, приспособления и конфигурации, показанные на фиг. 24, можно изменять, заменять, дополнять или не использовать по желанию.
На фиг. 25 показан еще один пример альтернативы поворотному клину (328) и лентам для управления шарнирным механизмом (374, 376). В частности, на фиг. 24 показана пара шарнирных манипуляторов (810, 812), поворачивающихся вокруг цапфы (814), закрепленной на рукоятке (820). Рычажный механизм (816) шарнирно соединен с манипулятором (810), а также шарнирно соединен с кронштейном (856). Кронштейн (856) перемещается продольно внутри канала (866), образованного в рукоятке (820). Кронштейн (856) также крепится к ленте для управления шарнирным механизмом (876), проходящей через стержень (830) для поворота концевого эффектора на дистальном конце стержня (830). Следует иметь в виду, что эффективная длина ленты для управления шарнирным механизмом (876) в стержне (830) меняется при продольном перемещении кронштейна (856) по каналу (866) Следует также иметь в виду, что рычажный механизм (816) превращает вращение манипулятора (810) вокруг цапфы (814) в продольное перемещение кронштейна (856) по каналу (866). Например, если манипулятор (810) вжат внутрь в направлении рукоятки (820), кронштейн (856) перемещается дистально, перемещая дистально и ленту для управления шарнирным механизмом (876).
Рычажный механизм (818) шарнирно соединен с манипулятором (812), а также шарнирно соединен с кронштейном (858). Кронштейн (858) перемещается продольно внутри канала (868), образованного в рукоятке (820). Кронштейн (858) также крепится к ленте для управления шарнирным механизмом (878), проходящей через стержень (830) для поворота концевого эффектора на дистальном конце стержня (830). Следует иметь в виду, что эффективная длина ленты для управления шарнирным механизмом (878) в стержне (830) меняется при продольном перемещении кронштейна (858) по каналу (868). Следует также иметь в виду, что рычажный механизм (818) превращает вращение манипулятора (812) вокруг цапфы (814) в продольное перемещение кронштейна (858) по каналу (868). Например, если манипулятор (812) вжат внутрь в направлении рукоятки (820), кронштейн (858) перемещается дистально, перемещая дистально и шарнирную ленту (878).
Ленты для управления шарнирным механизмом (876, 878) в данном примере похожи на ленты для управления шарнирным механизмом (374, 376) в том, что движение кабелей (876, 878) вызывает поворот концевого эффектора. Поэтому следует иметь в виду, что при поворачивании манипулятора (810) или манипулятора (812) вокруг цапфы (814) поворачивается концевой эффектор. В некоторых вариантах при поворачивании одного манипулятора (810, 812) другой манипулятор (810, 812) остается практически неподвижным. В некоторых других вариантах один манипулятор (810, 812) поворачивается при активном поворачивании другого манипулятора (810, 812) пользователем. Например, один кронштейн (856, 858) может перемещаться проксимально при дистальном перемещении другого кронштейна (856, 858). Другие применимые конструкции очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Следует иметь в виду, что другие компоненты, приспособления, конфигурации и функциональности инструмента (300), описанные выше, могут легко сочетаться с компонентами, функциями и конфигурациями, показанными на фиг. 25. Следует также понимать, что компоненты, приспособления и конфигурации, показанные на фиг. 25, можно изменять, заменять, дополнять или не использовать по желанию.
В примерах, показанных на фиг. 16-23, используется клиновидный механизм управления шарнирным соединением, определяющий проксимальный угол открытия при помощи узла, расположенного в дистальной части рукоятки. Такими механизмами управления можно пользоваться при помощи большого пальца руки, держащей пистолетную рукоятку инструмента. На фиг. 24-25 показан клиновидный механизм управления шарнирным соединением, определяющий дистальный угол открытия при помощи узла, расположенного в проксимальной части рукоятки. Такими механизмами управления можно пользоваться при помощи указательного пальца руки, держащей пистолетную рукоятку инструмента. Конечно, механизмами управления шарнирным соединением на фиг. 16-25 можно пользоваться любым подходящим способом по желанию пользователя. Другие подходящие способы реализации и обращения с компонентами, функциями и конфигурациями на фиг. 16-23 очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
D. Примеры элемента управления шарнирным соединением с кожухом рукоятки
На фиг. 26 показан пример электрохирургического инструмента (900), содержащего рукоятку (920), стержень (930), выступающий дистально от рукоятки (920) и концевой эффектор (940), расположенный на дистальном конце стержня (930). Рукоятка (920) в настоящем примере включает пистолетную рукоятку (922), спусковой крючок (924) и кнопку активации (926). За исключением пистолетной рукоятки (922), описанной ниже подробнее, описанные выше компоненты могут быть реализованы и эксплуатироваться в соответствии с различными инструкциями о таких компонентах в настоящей заявке.
Пистолетная рукоятка (922) в настоящем примере может поворачиваться относительно корпуса (921) рукоятки (920). В частности, пистолетная рукоятка (922) может поворачиваться вокруг вертикальной оси, проходящей через центр пистолетной рукоятки (922) и перпендикулярной продольной оси, определяемой стержнем (930). Стержень (950) направлен вверх от пистолетной рукоятки (922) в корпус (921) и включает скобу (952), соединенную с парой кабелей (960, 962). Кабели (960, 962) проходят через стержень (930) и соединены с концевым эффектором (940). Концевой эффектор (940) шарнирно соединен со стержнем (930) у шарнирного сочленения (936).Шарнирное сочленение (936) в настоящем примере реализовано с возможностью выборочно размещать концевой эффектор (940) под различными углами относительно продольной оси, определяемой стержнем (930), посредством противоположно направленных продольных перемещений кабелей (960, 962). Следует иметь в виду, что взаимодействие кабелей (960, 962) и хомутика (952) обеспечивает противоположно направленные продольные перемещения кабелей (960, 962) при вращении пистолетной рукоятки (922) относительно корпуса (921). В частности, когда пистолетная рукоятка (922) вращается в одном направлении, кабель (960) выдвигается дистально, а кабель (962) втягивается проксимально, при этом концевой эффектор (940) поворачивается на шарнирном сочленении (936) в одну сторону. Когда пистолетная рукоятка (922) вращается в противоположном направлении, кабель (960) втягивается проксимально, а кабель (962) выдвигается дистально, при этом концевой эффектор (940) поворачивается на шарнирном сочленении (936) в другую сторону.
Конечно, хомутик (952) и кабели (960, 962) можно заменить рядом других компонентов, в том числе, шестерней и установленными напротив друг друга рейками. Различные другие применимые компоненты очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Следует также иметь в виду, что пистолетная рукоятка (922) может включать множество функций, обеспечивающих вращение рукоятки (922) относительно корпуса (921). Только в качестве примера: пистолетная рукоятка (922) может включать одну или несколько вертикальных борозд, ребер, накаток, выступов, эластомерных элементов и т.д.
На фиг. 27-28B показан пример электрохирургического инструмента (1000), содержащего рукоятку (1020), стержень (1030), выступающий дистально от рукоятки (1020) и концевой эффектор (1040), расположенный на дистальном конце стержня (1030). Рукоятка (1020) в настоящем примере включает пистолетную рукоятку (1022), спусковой крючок (1024) и кнопку активации (1026). За исключением описанных ниже случаев описанные выше компоненты могут реализовываться и функционировать в соответствии с различными инструкциями относительно таких компонентов в данной заявке.
Рукоятка (1020) в данном примере также содержит верхнюю часть (1050) и нижнюю часть (1052). Как показано, верхняя часть (1050) может поворачиваться по отношению к нижней части (1052) вокруг поворотной оси (1054). Как видно при переходе от фиг. 28А к фиг. 28B, поворот верхней части приводит к соответствующему повороту концевого эффектора (1040) по отношению к стержню (1030) на шарнирном сочленении (1036). Различные компоненты и приспособления, которые можно использовать для реализации поворота концевого эффектора (1040) относительно стержня (1030) при повороте верхней части (1050) по отношению к нижней части (1052) очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Также следует иметь в виду, что для обеспечения достаточного сцепления спускового крючка (1024) с концевым эффектором (1040) при различных углах поворота можно использовать различные компоненты и приспособления.
Как показано на фиг. 27, нижняя часть (1052) включает спусковую кнопку (1056). Спусковая кнопка (1056) предназначена выборочно разблокировать положение верхней части (1050) по отношению к нижней части (1052). Например, спусковую кнопку (1056) можно изначально нажать, чтобы разблокировать положение верхней части (1050) по отношению к нижней части (1052). Удерживая спусковую кнопку (1056), пользователь может поворачивать верхнюю часть (1050) по отношению к нижней части (1052) и наоборот. При некоторых настройках пользователь может использовать положение стержня (1030) в троакаре в качестве опоры или механического основания для поддержания положения верхней части (1050) по отношению к пациенту при поворачивании пользователем нижней части (1052). После того как пользователь установил требуемый угол поворота концевого эффектора (1040), он может отпустить спусковую кнопку (1056) и заблокировать положение частей (1050, 1052), чтобы зафиксировать угол поворота концевого эффектора (1040). Различные подходящие способы реализации спусковой кнопки (1056) для обеспечения такой функциональности очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Кроме того, в контексте изложенной в данной заявке информации специалистам в данной области очевидны различные подходящие альтернативы спусковой кнопке (1056).
На фиг. 29-30 показан пример электрохирургического инструмента (1100), содержащего рукоятку (1120) и стержень (1130), выступающий дистально от рукоятки (1120). На дальнем конце стержня (1130) расположен концевой эффектор (не показан). Рукоятка (1120) в настоящем примере включает пистолетную рукоятку (1122), спусковой крючок (1124) и кнопку активации (1126). За исключением описанных ниже случаев описанные выше компоненты могут реализовываться и функционировать в соответствии с различными инструкциями относительно таких компонентов в данной заявке.
Рукоятка (1120) в данном примере также содержит дистальную часть (1150) и проксимальную часть (1152). Как показано, дистальная часть (1150) может поворачиваться по отношению к проксимальной части (1152) вокруг поворотной оси (1154). В результате такого поворота концевой эффектор соответствующим образом поворачивается по отношению к стержню (1130) на шарнирном сочленении (не показано). Различные компоненты и приспособления, которые можно использовать для реализации поворота концевого эффектора относительно стержня (1130) при повороте дистальной части (1150) по отношению к проксимальной части (1152) очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Также следует иметь в виду, что для обеспечения достаточного сцепления спускового крючка (1124) с концевым эффектором при различных углах поворота можно использовать различные компоненты и приспособления.
Дистальная часть (1150) также включает спусковой механизм (1156). Спусковой механизм (1156) предназначен выборочно разблокировать положение дистальной части (1150) по отношению к проксимальной части (1152). Например, спусковой механизм (1156) можно изначально нажать, чтобы разблокировать положение дистальной части (1150) по отношению к проксимальной части (1152). Удерживая спусковой механизм (1156), пользователь может поворачивать дистальную часть (1150) по отношению к проксимальной части (1152) и наоборот. При некоторых настройках пользователь может использовать положение стержня (1130) в троакаре в качестве опоры или механического основания для поддержания положения дистальной части (1150) по отношению к пациенту при повороте пользователем проксимальной части (1152). После того как пользователь установил требуемый угол поворота концевого эффектора, он может отпустить спусковой механизм (1156) и заблокировать положение частей (1150, 1152), чтобы зафиксировать угол поворота концевого эффектора. Различные подходящие способы реализации спускового механизма (1156) для обеспечения такой функциональности очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Кроме того, в контексте изложенной в данной заявке информации специалистам в данной области очевидны различные подходящие альтернативы спусковому механизму (1156).
E. Пример механизма управления шарнирным соединением со сцеплением
На фиг. 31-35 показан пример электрохирургического инструмента (1200), содержащего рукоятку (1220) и стержень (1230), выступающий дистально от рукоятки (1220). На дальнем конце стержня (1230) расположен концевой эффектор (не показан). Рукоятка (1220) в настоящем примере включает пистолетную рукоятку (1222), спусковой крючок (1224) и кнопку активации (не показана). За исключением описанных ниже случаев описанные выше компоненты могут реализовываться и функционировать в соответствии с различными инструкциями относительно таких компонентов в данной заявке.
Рукоятка (1220) в настоящем примере также содержит диск для управления шарнирным соединением (1250) и ручку вращения (1234). Как показано на фиг. 32-33 на внутренней части диска (1250) расположено множество зубцов (1252). Первая шестерня (1270) переплетается с зубцами (1252) непосредственно. Вторая шестерня (1280) переплетается непосредственно с первой шестерней (1270), но не переплетается напрямую с зубцами (1252). Таким образом, когда диск (1250) поворачивается в одном направлении, первая шестерня (1270) поворачивается в том же направлении, а вторая шестерня (1280) поворачивается в противоположном направлении. Первый приводной стержень (1272) проходит через первую шестерню (1270), а второй приводной стержень (1282) проходит через вторую шестерню (1280). Стержень (1272) и шестерня (1270) реализованы так, что стержень (1272) вращается с шестерней (1270), но стержень (1272) может и перемещаться по отношению к шестерне (1270). Кроме того, стержень (1282) и шестерня (1280) реализованы так, что стержень (1282) вращается с шестерней (1280), но стержень (1282) может и перемещаться по отношению к шестерне (1280). Только в качестве примера: части стержней (1272, 1282), проходящие через шестерни (1270, 1280) могут иметь гексагональный поперечный разрез, при этом в шестернях (1270, 1280) существуют соответствующие шестиугольные отверстия. В качестве другого наглядного примера: на части стержней (1272, 1282), проходящей через шестерни (1270, 1280) могут иметься бородки, а в отверстиях шестерней (1270, 1280) могут иметься соответствующие пазы. Другие применимые конфигурации очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Кроме того, как показано на фиг. 32, через внутреннюю часть диска (1250), отдельно от шестерней (1270, 1280) и стержней (1272, 1282), проходит режуще-сшивающий элемент (1260). Режуще-сшивающий элемент (1260) в этом примере по существу эквивалентен описанному выше режуще-сшивающему элементу (60).
Ручка вращения (1234) в данном примере реализована с возможностью вращать стержень (1230), компоненты, проходящие через стержень (1230), диск (1250) и шестерни (1270, 1280) вместе, относительно рукоятки (1220) и относительно продольной оси стержня (1230). Поэтому с ручкой вращения (1234) можно обращаться аналогично тому, как описано выше для ручки вращения (34). В данном примере ручка вращения (1234) и стержень (1230) остаются неподвижными, когда вращается диск (1250), несмотря на то, что диск (1250) вращается при вращении ручки вращения (1234). Различные приемлемые способы обеспечения представленной здесь функциональности очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
Как показано на фиг. 31 и 33, на ручке вращения (1234) установлена кнопка сцепления (1290). Кнопка сцепления (1290) реализована с возможностью одновременного приведения в действие пары стержней (1292, 1294). Первый шток (1292) связан с первой манжетой (1274); при этом, второй шток (1294) связан со второй манжетой (1284). Первая манжета (1274) определяет внутреннюю резьбовую часть (1275) и расположена около резьбовой части (1276) первого стержня (1272). На первой манжете (1274) также располагается выступ (1278), направленный вертикально вверх и соприкасающийся с первым штоком (1292). Вторая манжета (1284) определяет внутреннюю часть резьбы (не показано) и расположена вокруг резьбовой части (1288) второй манжеты (1282). Вторая манжета (1284) определяет верхний выступ (1286), с которым взаимодействует второй шток (1294). Обе манжеты (1274, 1284) могут деформироваться для выборочного расцепления соответствующих резьбовых частей (1276, 1278), как подробнее описано ниже. При этом, манжеты (1274, 1284) упруго смещаются так, чтобы их внутренние резьбовые части зацеплялись с резьбовыми частями (1276, 1278) стержней (1272, 1282).
Когда внутренние резьбовые части манжет (1274, 1284) зацепляются с резьбовыми частями (1276, 1278) стержней (1272, 1282), манжеты (1274, 1284) действуют как фиксированные гайки, а резьбовые части (1276, 1278) стержней (1272, 1282) действуют как ходовые винты. Таким образом, когда стержни (1272, 1282) поворачиваются относительно манжет (1274, 1284), стержни (1272, 1282) двигаются поступательно. Так как стержни (1272, 1282) всегда вращаются в противоположных направлениях в данном примере, а направление резьбы одинаково для обеих резьбовых частей (1276, 1278), стержни (1272, 1282) перемещаются в противоположных направлениях при поворачивании стержней (1272, 1282) относительно манжет (1274, 1284). Стержни (1272, 1282) похожи на описанные выше шарнирные ленты (374, 376) в том, что движение стержней (1272, 1282) вызывает поворот концевого эффектора. В частности, при передвижении стержней (1272, 1282) в противоположных направлениях концевой эффектор поворачивается по отношению к стержню (1230). На дистальном конце стержней (1272, 1282) могут быть расположены один или несколько подшипников для поглощения вращательного движения стержней (1272, 1282) так, что дистальные концы стержней (1272, 1282) в итоге сообщают для поворота только поступательный импульс.
Как показывает переход с фиг. 34А на фиг. 34B, манжеты (1274, 1284), выборочно деформируются, чтобы их резьбовые части могли расцепиться с резьбовыми частями (1276, 1286) стержней (1270, 1280). После расцепления стержни (1270, 1280) могут свободно вращаться и перемещаться относительно манжет (1274, 1284). Манжеты (1274, 1284) деформируются, когда штоки (1292, 1294) надавливают на выступы (1278, 1288). В некоторых вариантах шарнирное сочленение или часть стержня (1230) упруго принимает прямую конфигурацию. В некоторых таких вариантах расцепление стержней (1270, 1280) и манжет (1274, 1288) приводит к внезапному и быстрому возврату шарнирного сочленения или части к, по существу, прямой конфигурации. Таким образом, кнопка сцепления (1290) обеспечивает сброс, позволяющий быстро выпрямить изогнутый стержень. Различные подходящие способы, которыми шарнирное сочленение или часть стержня (1230) могут упруго возвращаться в прямую конфигурацию, очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Следует также иметь в виду, что шестерни (1280, 1270) и другие компоненты могут быть реализованы так, чтобы противостоять отводу назад, чтобы шарнирное сочленение или часть стержня (1230) оставались в активированном положении при использовании инструмента (1200) до поворота диска (1250) или нажатия кнопки сцепления (1290).
Для иллюстрации на фиг. 35 приведен пример варианта электрохирургического инструмента (1200). В частности, на фиг. 35 показан электрохирургический инструмент (1300) с компонентами и возможностями, по существу, идентичными описанному выше электрохирургическому инструменту (1200), за исключением другого диска управления шарнирным механизмом (1350) и другой ручки вращения (1334). В этом примере на ручке вращения (1334) нет эквивалентной кнопки сцепления (1290), но в остальном она эквивалентна ручке вращения (1334). Диск управления шарнирным механизмом (1350) функционирует аналогично кнопке сцепления (1290), когда диск (1350) тянут в проксимальном направлении по отношению к рукоятке (1320). В частности, диск управления шарнирным механизмом (1350) может освобождать манжеты из резьбовых частей приводных стержней, схожим с описанным выше методом выборочного расцепления, когда диск (1350) находится в проксимальном положении. Диск управления шарнирным механизмом (1350) стремиться к упругому переходу в дистальную позицию, в которой диск управления шарнирным механизмом (1350) функционирует так же, как описанный выше диск (1250). Другие подходящие варианты электрохирургических инструментов (1200, 1300) очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
F. Пример механизма управления шарнирным соединением посредством многофункционального спускового крючка
На фиг. 36 показан пример электрохирургического инструмента (1400), содержащего рукоятку (1420) и стержень (1430), выступающий дистально от рукоятки (1420). На дальнем конце стержня (1430) расположен концевой эффектор (не показан). Рукоятка (1420) в настоящем примере включает пистолетную рукоятку (1422), спусковой крючок (1424) и кнопку активации (1426). За исключением описанных ниже случаев, описанные выше компоненты могут реализовываться и функционировать в соответствии с различными инструкциями относительно таких компонентов в данной заявке.
В настоящем примере спусковой крючок (1424) может выборочно приводить в действие концевой эффектор описанным выше образом или поворачивать концевой эффектор по отношению к стержню (1430). Рукоятка (1420) включает переключатель выбора режима (1450), позволяющий пользователю выбирать, какие функции выполняет спусковой крючок (1424). Когда переключатель (1450) находится в одном положении, спусковой крючок (1424) приводит концевой эффектор в действие, как описано выше. Когда переключатель (1450) находится в другом положении, спусковой крючок (1424) поворачивает концевой эффектор по отношению к стержню (1430). Если пользователь применяет спусковой крючок (1424) для поворота концевого эффектора, то при использовании спускового крючка (1424) пользователь может передвинуть переключатель (1450), чтобы зафиксировать концевой эффектор в сомкнутом положении. При этом подвижный переключатель (1450) блокирует концевой эффектор в сомкнутом положении.
В некоторых вариантах, когда подвижный переключатель (1450) находится в положении для размещения спускового крючка (1424) в режиме регулировки шарнирного соединения, спусковой крючок (1424) можно перемещать из исходного положения (1460) в дистальное положение (1462) для поворота концевого эффектора в первом направлении; или из исходного положения (1460) в проксимальное положение (1464) для поворота концевого эффектора во втором направлении, противоположном первому направлению. В некоторых других вариантах переключатель (1450) может находиться в трех положениях: положении, в котором спусковой крючок (1424) приводит концевой эффектор в движение, положении, в котором спусковой крючок (1424) поворачивает концевой эффектор вправо, и положении, в котором спусковой крючок (1424) поворачивает концевой эффектор влево. В этих вариантах спусковой крючок (1424) поворачивает концевой эффектор в выбранном направлении просто при прижатии спускового крючка (1424) к пистолетной рукоятке (1422). Спусковой крючок (1424) также может действовать как храповый механизм при сгибании, чтобы спусковой крючок (1424) можно было нажимать и отпускать несколько раз для дальнейшего поворота концевого эффектора в любом направлении. Различные подходящие компоненты и функции, которые можно использовать для обеспечения поворота концевого эффектора в зависимости от положения спускового крючка (1424), очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Кроме того, различные подходящие компоненты и функции, которые можно использовать для обеспечения выборочности режимов работы спускового крючка (1424), также очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
G. Пример механизма управления шарнирным соединением посредством дополнительного спускового крючка
На фиг. 37-38 показан пример электрохирургического инструмента (1500), содержащего рукоятку (1520) и стержень (1530), выступающий дистально от рукоятки (1520). На дальнем конце стержня (1530) расположен концевой эффектор (не показан). Рукоятка (1520) в настоящем примере включает пистолетную рукоятку (1522), спусковой крючок (1524) и кнопку активации (1526). За исключением описанных ниже случаев, описанные выше компоненты могут реализовываться и функционировать в соответствии с различными инструкциями относительно таких компонентов в данной заявке.
Инструмент (1500) в данном примере включает дополнительный рычаг (1550), связанный со спусковым крючком (1424). Дополнительный рычаг (1550) также соединен со стержнем (1560), вращающимся внутри рукоятки (1520). Таким образом, дополнительный рычаг (1550) поворачивается в, по существу, горизонтальной плоскости вокруг, по существу, вертикальной оси, как показано на фиг. 38. В некоторых вариантах рычаг (1550) поворачивается вокруг оси, определяемой спусковым крючком (1524). К стержню (1560) крепится скоба (1562), которая вращается вместе со стержнем (1560). К скобе (1562) крепится пара кабелей (1570, 1572). Отношения между этими компонентами обеспечивают противоположное перемещение кабелей (1570, 1572) при поворачивании стержня (1560) и скобы (1562). Таким образом, когда дополнительный рычаг (1550) вращается вдоль, по существу, горизонтальной плоскости вокруг, по существу, вертикальной оси, кабели (1570, 1572) перемещаются через стержень (1530) в противоположных продольных направлениях. Противоположно направленные продольные перемещения кабелей (1570, 1572) обеспечивают поворот концевого эффектора на дистальном конце стержня (1530), в соответствии с различными инструкциями в данной заявке. Поворот дополнительного рычага (1550) в одном направлении вдоль, по существу, горизонтальной плоскости позволяет поворачивать концевой эффектор в одну сторону; поворот дополнительного рычага (1550) в противоположном направлении вдоль, по существу, горизонтальной плоскости позволяет поворачивать концевой эффектор в другую сторону.
Дополнительный рычаг (1550), также можно выборочно блокировать, чтобы выборочно блокировать концевой эффектор в согнутом (или разогнутом) положении по отношению к стержню (1530). В частности, дополнительный рычаг (1550) может поворачиваться вдоль, по существу, вертикальной плоскости вокруг, по существу, горизонтальной оси, как показано на фиг. 37, чтобы выборочно блокироваться. Например, дополнительный рычаг (1550) можно поворачивать наверх для выборочной блокировки; или вниз для выборочной разблокировки. В некоторых вариантах дополнительный рычаг (1550) может поворачиваться вдоль, по существу, горизонтальной плоскости или, по существу, вертикальной плоскости при помощи только одного пальца руки, держащей пистолетную рукоятку (1522), что обеспечивает возможность полностью управлять инструментом (500) одной рукой. Различные подходящие компоненты, приспособления и конфигурации, которые могут быть использованы для обеспечения описанной выше функциональности дополнительного рычага (1550) очевидны специалистам в данной области в контексте изложенной в данной заявке информации. Кроме того, другие подходящие компоненты, приспособления, конфигурации и функциональности инструмента (1500) очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
H. Пример механизма управления шарнирным соединением с поворотным кулачком
На фиг. 39-43 показан пример электрохирургического инструмента (1600), содержащего рукоятку (1620) и стержень (1630), выступающий дистально от рукоятки (1620). На дистальном конце стержня (1630) расположен концевой эффектор (1640), который может поворачиваться по отношению к стержню (1630) путем выборочного поворачивания на шарнирном сочленении (1636). Рукоятка (1620) в настоящем примере включает пистолетную рукоятку (1522), спусковой крючок (не показан) и кнопку активации (не показана). За исключением описанных ниже случаев описанные выше компоненты могут реализовываться и функционировать в соответствии с различными инструкциями относительно таких компонентов в данной заявке.
Инструмент (1600) в данном примере включает кулачковый элемент (1650), расположенный внутри рукоятки (1620). В частности, как показано на фиг. 40, кулачковый элемент (1650) шарнирно закреплен внутри корпуса (1621) рукоятки (1620) вертикальной цапфой (1625). Как лучше всего видно на фиг. 41-42, кулачковый элемент (1650) включает пару противоположных вкладок (1652), первый набор дистально направленных кулачков (1654) и второй набор дистально направленных кулачков (1656). Возвращаясь к фиг. 39, выступы (1652) выступают наружу от рукоятки (1620) через отверстия (1623), образованные в корпусе (1621). Пользователь может легко использовать выступы (1652) для выборочного поворачивания кулачкового элемента (1650) в любом направлении вокруг цапфы (1625). Кулачки (1654) смещены вбок относительно оси, вокруг которой поворачивается кулачковый элемент (1650). Кулачки (1656) также смещены вбок относительно оси, вокруг которой поворачивается кулачковый элемент (1650). Таким образом, когда кулачковый элемент (1650) поворачивается вокруг цапфы (1625) в одном направлении, кулачки (1654) перемещаются дистально, а кулачки (1656) перемещаются проксимально. Когда кулачковый элемент (1650) поворачивается вокруг цапфы (1625) в противоположном направлении, кулачки (1654) перемещаются проксимально, а кулачки (1656) перемещаются дистально.
Как лучше всего видно на фиг. 43, инструмент (1600) в этом примере также включает внешнее приводное кольцо (1670) и внутреннее приводное кольцо (1680). Приводные кольца (1680) расположены соосно и находятся в одинаковом продольном положении, когда концевой эффектор (1640) совмещен со стержнем (1630). Внешнее приводное кольцо (1670) взаимодействует с кулачками (1654), чтобы внешнее приводное кольцо (1670) можно было привести в движение дистально с помощью кулачков (1654), когда кулачковый элемент (1650) поворачивается в одном направлении. Внутреннее приводное кольцо (1680) взаимодействует с кулачками (1656), чтобы внутреннее приводное кольцо (1680) можно было привести в движение дистально с помощью кулачков (1656), когда кулачковый элемент (1650) поворачивается в другом направлении. Унитарно внутрь от внешнего приводного кольца (1670) отходит манипулятор (1672), прикрепленный к шарнирной ленте (1674). Кроме того, унитарно внутрь от внутреннего приводного кольца (1680) отходит манипулятор (1684), также прикрепленный к ленте для регулировки изгиба (1684). Поэтому ленты для регулировки изгиба (1674, 1684) продольно проходят через соответствующие приводные кольца (1670, 1680). Ленты для регулировки изгиба (1674, 1684) проходят через стержень (1630) и обеспечивают поворачивание концевого эффектора (1640) на шарнирном сочленении (1636), при перемещении лент (1674, 1684) в противоположных направлениях. Различные подходящие способы поворачивания концевого эффектора (1640) при перемещении лент (1674, 1684) в противоположных продольных направлениях очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
Из вышеизложенного следует понимать, что при поворачивании кулачкового элемента (1650) вокруг цапфы (1625) концевой эффектор (1640) поворачивается в зависимости от направления, в котором поворачивается кулачковый элемент (1650). Когда кулачковый элемент (1650) поворачивается в одном направлении, кулачки (1654) толкают внешнее приводное кольцо (1670) и ленты (1674) дистально, а кулачки (1656) перемещаются проксимально, чтобы переместить проксимально внутреннее приводное кольцо (1680) и ленты (1684). Когда кулачковый элемент (1650) поворачивается в противоположном направлении, кулачки (1656) толкают внутреннее приводное кольцо (1680) и ленты (1684) дистально, а кулачки (1654) перемещаются проксимально, чтобы переместить проксимально внешнее приводное кольцо (1670) и ленты (1674). Другие подходящие компоненты, приспособления, конфигурации и функциональности, которыми может быть снабжен инструмент (1600), очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
iv. Прочие примеры функций
Следует иметь в виду, что в любом из описанных здесь устройств, также могут использоваться одна или несколько функций, описанных в заявке на патент США. № [АДВОКАТСКИЙ РЕЕСТР № END6888USNP], озаглавленной «Элементы управления для шарнирного хирургического устройства», зарегистрированной на ту же дату, что и данная заявка, и включенную в нее посредством ссылки; в заявке на патент США № [АДВОКАТСКИЙ РЕЕСТР № END6889USNP], озаглавленной «Элементы шарнирного сочленения для шарнирного хирургического устройства», зарегистрированной на ту же дату, что и данная заявка, и включенную в нее посредством ссылки; или в заявке на патент США № [АДВОКАТСКИЙ РЕЕСТР № END6889USNP1], озаглавленной «Элементы шарнирного сочленения для шарнирного хирургического устройства», зарегистрированной на ту же дату, что и данная заявка, и включенную в нее посредством ссылки.
Следует также иметь в виду, что любое из описанных в данной заявке устройств может быть изменено, чтобы встроить двигатель или другое электрическое устройство для приведения в движение компонента, который в противном случае приводится в движение вручную. Различные примеры таких модификаций описаны в заявке на патент США номер 13/151,481, озаглавленной «Электрохирургическое устройство с мотором, с механической и электрической обратной связью», поданной 2 июня 1011 года, включенной в настоящую заявку посредством ссылки. Различные другие подходящие способы, которыми в любое из описанных в данной заявке устройств можно встроить двигатель или другое электрическое устройство, очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
Следует также иметь в виду, что любое из описанных здесь устройств можно модифицировать так, чтобы большинство, если не все, из необходимых компонентов содержались в самом медицинском устройстве. В частности, описанные здесь устройства могут быть адаптированы для использования внутреннего или подключаемого источника питания вместо подключения устройства к внешнему источнику питания с помощью кабеля. Различные примеры того, как медицинские приборы могут быть адаптированы для включения портативного источника питания, представлены в предварительной заявке на патент США, серийный № 61/410,603, поданной 5 ноября 2010 года, озаглавленной "Электрические Хирургические инструменты", включенной в настоящую заявку посредством ссылки. Различные другие подходящие способы, которыми в любое из описанных в данной заявке устройств можно встроить источник питания, очевидны специалистам в данной области в контексте изложенной в данной заявке информации.
VI. Разное
Хотя приведенные здесь примеры описаны в основном в контексте электрохирургических инструментов, следует понимать, что инструкции, представленные в данной заявке, можно легко применить к целому ряду других видов медицинских инструментов. В качестве примера, содержащиеся в настоящей заявке инструкции можно легко применить к эффекторам для ткани, инструментам для отбора проб тканей, хирургическим скобам, ультразвуковым хирургическим инструментам и т.д. Следует также иметь в виду, что содержащиеся в настоящей заявке инструкции можно легко применить к любому из инструментов, описанных в одном из приводимых в настоящей заявке документов, при этом, содержащиеся в настоящей заявке инструкции можно легко сочетать с инструкциями в приводимых в настоящей заявке документах различными способами. Другие виды инструментов, к которым можно применять содержащиеся в настоящей заявке инструкции, очевидны для специалистов в данной области.
Следует иметь в виду, что любой патент, публикация или другая информация, которые полностью или частично включены в настоящий документ путем ссылки, являются составной частью данного документа в той степени, в которой они не противоречат определениям, положениям или другой информации, представленной в настоящем документе. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям данного документа, которая была включена в указанный документ посредством ссылки. Любой материал или его часть, которая включена в настоящий документ посредством ссылки и которая противоречит указанным определениям, положениям или другой информации, представленной в настоящем документе, включается в данный документ в той мере, в которой между включенным посредством ссылки материалом и настоящим документом не возникает противоречий.
Варианты реализации настоящего изобретения применимы в обычных эндоскопических хирургических приборах и хирургических приборах для открытых операций, а также в операциях при содействии роботов. Например, специалистам в данной области понятно, что различные содержащиеся в настоящей заявке инструкции могут легко сочетаться с различными инструкциями, приведенными в патенте США № 6783524, озаглавленном «Робототехнический хирургический инструмент с приспособлением для ультразвуковой каутеризации и резки», опубликованном 31 августа 2004, включенном в настоящую заявку посредством ссылки.
Варианты реализации устройств, описанных в настоящем документе, могут представлять собой устройства однократного применения или могут быть предназначены для многократного использования. В одном или обоих случаях варианты могут восстанавливаться для повторного использования после, по крайней мере, одного использования. Подготовка к повторному использованию может предусматривать любую комбинацию стадий разборки устройства с последующей очисткой или заменой конкретных деталей, за которыми следует сборка. В частности, варианты реализации хирургического инструмента могут быть разобраны, и любое количество конкретных частей или компонентов устройства может быть выборочно заменено или удалено в любом сочетании. После очистки и (или) замены определенных деталей варианты реализации устройства можно собрать для последующего использования в подразделении, выполняющем процедуру подготовки к повторному использованию, или это может осуществить хирургическая бригада непосредственно перед проведением хирургического вмешательства. Специалисты в данной области обратят внимание, что при подготовке устройства к повторному использованию могут использоваться различные способы разборки, чистки/замены и повторной сборки. Использование таких методик и собираемое в результате восстановленное устройство входят в сферу действия настоящей заявки.
В качестве примера, описанные здесь варианты реализации могут быть подготовлены до операции. Во-первых, новый или использованный инструмент может быть получен и при необходимости очищен. Затем его можно стерилизовать. В одном способе стерилизации инструмент помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет Тайвек (TYVEK). Упомянутый контейнер с инструментом затем можно поместить в поле действия излучения, способного проникнуть внутрь контейнера, такого как гамма-излучение, рентгеновское излучение или пучок быстрых электронов. Излучение способно убить бактерии, находящиеся на поверхности устройства и в емкости. Стерилизованный таким образом инструмент может затем храниться в своем стерильном контейнере. Запечатанный контейнер может сохранять инструмент стерильным до его открытия в медицинском учреждении. Устройство также можно стерилизовать любым другим известным в данной области способом, в том числе, бета- или гамма-излучением, оксидом этилена или паром.
С учетом продемонстрированных и описанных вариантов реализации настоящего изобретения путем соответствующей модификации со стороны специалиста в данной области и без выхода за рамки настоящего изобретения может добиться дальнейшей адаптации описанных в настоящей заявке методов и систем. Было упомянуто несколько подобных потенциальных модификаций, а дальнейшие модификации очевидны специалистам в данной области. Например, описанные выше примеры, варианты геометрии, материалы, размеры, коэффициенты, шаги и тому подобное приведены в качестве иллюстрации и не являются обязательными. Соответственно, рамки настоящего изобретения следует рассматривать в свете следующих требований, учитывая, что они не ограничиваются подробностями структуры и функционирования, показанными и описанными в спецификациях и чертежах.
Реферат
Изобретение относится к медицине. Электрохирургическое устройство содержит корпус, концевой эффектор, режущий элемент и стержень. Концевой эффектор содержит пару браншей и, по крайней мере, один электрод. Электрод обеспечивает вывод РЧ энергии в ткани, зажатые между браншами. Режущий элемент предназначен разрезать ткань, зажатую между браншами. Стержень включает шарнирную часть, которая позволяет выборочно поворачивать концевой эффектор по отношению к стержню. Корпус включает механизм управления. Механизм управления может включать спусковой крючок. Крючок приводит в действие режущий элемент. Спусковой элемент может выборочно расцеплять шарнирную часть от механизма управления, что позволяет возвращать шарнирную часть в прямое положение по отношению к стержню. 2 з.п. ф-лы, 43 ил.
Формула
(a) корпус, содержащий рукоятку, образующую первую ось;
(b) концевой эффектор, содержащий:
(i) первую браншу, и
(ii) вторую браншу,
при этом первая бранша выполнена с возможностью перемещения ко второй бранше для зажатия ткани между первой и второй браншами,
при этом по меньшей мере одна из браншей содержит по меньшей мере один электрод,
при этом по меньшей мере один электрод выполнен с возможностью функционирования для подачи РЧ энергии в ткань, зажатую между первой и второй браншами;
(c) режущий элемент, выполненный с возможностью резания ткани, зажатой между первой и второй браншами;
(d) приводной элемент, выполненный с возможностью выборочного приведения в действие режущего элемента; и
(e) стержень, продолжающийся между корпусом и концевым эффектором, при этом стержень образует продольную ось, которая не является параллельной первой оси, причем стержень включает шарнирную часть, выполненную с возможностью выборочного помещения концевого эффектора в непараллельных положениях по отношению к продольной оси стержня, при этом корпус содержит механизм управления, выполненный с возможностью выборочного приведения в действие шарнирной части,
причем приводной элемент связан с механизмом управления, так что механизм управления является перемещаемым к первой оси и от нее, чтобы приводной элемент приводил в действие режущий элемент, и
механизм управления выполнен с возможностью поворота вокруг первой оси, чтобы выборочно приводить в действие шарнирную часть.
Комментарии