Хирургический инструмент, прежде всего электрохирургический инструмент - RU2506903C2
Код документа: RU2506903C2
Чертежи








Описание
Изобретение относится к хирургическому инструменту, прежде всего электрохирургическому инструменту, по п.1 формулы изобретения.
Из уровня техники известны хирургические инструменты, которые объединяют несколько функций. С такими комбинированными инструментами отпадает необходимость в смене между требующимися в определенный момент времени «отдельными инструментами». Например, лапароскопические операции, при которых, обычно смена инструмента связана с трудоемким вытягиванием и введением в троакар, так могут быть проведены эффективнее, Известны, например, комбинированные инструменты для плотной заделки сосудов и для резания ткани.
Частым применением для таких инструментов является выделение ткани, которая должна быть изъята. При выделении, на первой стадии ткань захватывается и коагулируется. На второй стадии коагулированный участок рассекается режущим инструментом. При этом коагулирование происходит для того, чтобы закупорить кровеносные сосуды и предотвратить кровотечение при резании. Эти стадии повторяются до тех пор, пока тканевый узел не будет отделен от тела. Такие методы являются стандартными при раковых заболеваниях, например при гистерэктомии, при которой удаляется матка.
Такой инструмент требует первого функционального узла для захвата и второго функционального узла для резания ткани, при этом должна быть предусмотрена механика для передачи усилия или же перемещения. Соответствующее усилие может быть приложено пользователем посредством органов управления на рукоятке, например ручного спускового механизма или пальцевого спускового механизма.
Обычно в хирургических инструментах согласно уровню техники предусмотрено несколько элементов управления, при этом каждый элемент управления придан одному функциональному узлу. Благодаря этому функциональные узлы могут управляться отдельно. Например, могут быть предусмотрены ручной спусковой механизм для захвата, пальцевой спусковой механизм для резания и отдельный коагуляционный переключатель. Отдельное выполнение элементов управления воспринимается как недостаток, так как операцию приходится часто прерывать, потому что, например, плавный захват и резание в один прием является невозможным. Кроме того, пользователь ограничен, например, если указательный палец используется для резания и более не имеется в распоряжении для активирования процесса коагуляции. Кроме того, различные элементы управления ведут к дополнительным затратам и сравнительно «громоздким» инструментам. При рассмотрении в общем, инструмент в применении становится более «запутанным».
Кроме того, из уровня техники известны хирургические инструменты, в которых две разные функции, конкретно захват и резание ткани, могут управляться только одним элементом управления. Например, US 628791 В2 описывает электрохирургический инструмент для коагулирования и резания ткани. Три разных функции, конкретно захват, коагулирование и резание ткани, управляются только одним элементом управления. Если предусмотренный ручной спусковой механизм взводится на некоторую первую длину хода, зев закрывается, если он взводится дальше, приводится в действие коагуляционный переключатель, если он взводится еще дальше, лезвие проводится через зажатую ткань. Во всем диапазоне перемещения пользователем должно производиться усилие для удержания ткани, при этом преодолевается сила противодействия пружины. Для стопорения позиции захвата в US 7 628 791 B2, хотя и предлагаются фиксирующие устройства, однако они обеспечивают возможность фиксации только до того, как начнется процесс резания. Во время процесса резания соответствующая фиксация невозможна и была бы вредной, так в известном устройстве имело бы следствием то, что скальпель не мог бы быть отведен назад. В целом при управлении инструментом согласно US 7628791 B2 пользователь сравнительно ограничен, например, во время резания ткани необходимо следить за тем, чтобы ткань в достаточной степени удерживалась.
Задача настоящего изобретения состоит в разработке хирургического инструмента по меньшей мере с двумя функциональными узлами с простым и надежным манипулированием.
Эта задача решена посредством хирургического инструмента, прежде всего электрохирургического инструмента, по п.1 формулы изобретения.
Эта задача решена, прежде всего, посредством хирургического инструмента, прежде всего электрохирургического инструмента, с элементом управления приведения в действие по меньшей мере первого и второго функциональна узла, при этом элемент управления выполнен с возможностью приведения в поступательное и/или вращательное перемещение в пределах диапазона перемещения, при этом посредством перемещения в пределах первого частичного диапазона перемещения является приводимым в действие первый функциональный узел, а посредством перемещения в пределах второго частичного диапазона перемещения является приводимым в действие второй функциональный узел, при этом предусмотрено пересоединительное устройство таким образом, что вследствие перемещения элемента управления через пересоединительный диапазон между первым и вторым частичным диапазоном может быть прервана кинематическая связь между первым функциональным узлом и элементом управления, и может быть установлена кинематическая связь между вторым функциональным узлом и элементом управления.
Существенный момент изобретения заключается в том, что благодаря предусмотренному пересоединительному устройству перемещение в пределах первого частичного диапазона не оказывает влияния на второй функциональный узел, и наоборот, что перемещение в пределах второго частичного диапазона не оказывает влияния на первый функциональный узел. Таким образом, пользователь может сконцентрироваться на выполнении первой или же второй функции без необходимости обращать внимание на соответственно другую функцию. Тем не менее, приведения в действие функциональных узлов необходим только один элемент управления. В целом, управляемость хирургического инструмента по сравнению с уровнем техники улучшается.
В пересоединительном диапазоне, при необходимости, в поддиапазоне пересоединительного диапазона, может быть установлена или прервана кинематическая связь между элементом управления и первым и/или вторым функциональным узлом.
Предпочтительно, предусмотрено по меньшей мере одно стопорящее устройство таким образом, что первый функциональный узел или его частичный компонент стопорится при перемещении элемента управления в пределах второго частичного диапазона, и, при необходимости, наоборот, что второй функциональный узел или его частичный компонент стопорится при перемещении элемента управления в пределах первого частичного диапазона. Стопорящее устройство может быть составной частью пересоединительного устройства. Кроме того, такое стопорение облегчает управление хирургическим инструментом. Если первый функциональный узел является, например, удерживающим устройством или же захватным устройством для ткани, то обеспечивается, что удерживающее устройство является константным относительно своего производимого усилия и/или своего положения.
В предпочтительном варианте стопорящее устройство или же пересоединительное устройство содержит коленчато-рычажное устройство. Коленчато-рычажное устройство может быть выполнено таким образом, что стопорение или же пересоединение может происходить при прохождении мертвой точки. В этом случае мертвая точка определяет пересоединительный диапазон. В общем, пересоединительный диапазон может быть точечным, при этом пересоединение может происходить при прохождении соответствующей пересоединительной точки. Стопорение или же пересоединение с помощью коленчато-рычажного устройства конструктивно является особенно простым и может происходить простым образом.
В одном конкретном конструктивном варианте пересоединительное устройство или же стопорящее устройство содержит направляющую, в которой является направляемым элемент управления, прежде всего (по существу) в одной плоскости перемещения. Направляющая может быть выполнена таким образом, что пересоединение или же стопорение, при необходимости, во взаимодействии с другими компонентами, может быть инициировано перемещением элемента управления внутри по меньшей мере одной направляющей. Такая направляющая облегчает пересоединение или же стопорение, а тем самым и управление хирургическим инструментом.
Предпочтительно, направляющая выполнена V-образной или U-образной, при этом первая полка V-U-образной направляющей короче, чем вторая полка V/U-образной направляющей. Предпочтительно, направляющая выполнена таким образом, что стопорение является реализованным, если направляющая расположена внутри первой, более короткой полки V-U-образной направляющей. Более предпочтительно, направляющая может быть выполнена таким образом, что стопорение является прекращенным, если элемент управления расположен или же переведен во вторую, более длинную полку V-/U-образной направляющей. При необходимости, направляющая может быть выполнена таким образом, что при переводе из одной полки в другую одновременно происходит пересоединение. Такие направляющие являются конструктивно простыми и облегчают управление.
В одном конкретном конструктивном варианте направляющая является, прежде всего, неотъемлемой составной частью корпусного элемента, предпочтительно щечки рукоятки. За счет этого можно сэкономить на одной детали, что снижает затраты.
Предпочтительно, первый/второй функциональный узел содержит режущее устройство, такое как, например, механическое режущее устройство или лазерное режущее устройство, и/или удерживающее устройство или же захватное устройство и/или коагуляционное устройство, прежде всего высокочастотное коагуляционное устройство, и/или водоструйное устройство, прежде всего режущее водоструйное устройство, и/или оптическое устройство, такое как, например, камеру или осветительное устройство, и/или отсосное устройство, и/или промывочное устройство, и/или криозонд, и/или устройство для биопсии, такое как например, зонд для биопсии или захват для биопсии, и/или предпочтительно монополярный режущий электрод. Кроме того, первый функциональный узел, предпочтительно, содержит удерживающее устройство, а второй функциональный узел режущее устройство.
Кроме того, предусмотрена, предпочтительно, по меньшей мере одна зубчатая рейка и по меньшей мере одна шестерня для кинематической передачи между элементом управления и по меньшей мере одним функциональным узлом.
Предпочтительно, шестерня является приводимой в зацепление с зубным рядом, который, предпочтительно, соединен с корпусным элементом, более предпочтительно со щечкой рукоятки, и выполнена, прежде всего, в виде неотъемлемой составной части корпусного элемента или же щечки рукоятки, таким образом, что вращение шестерни приводит к поступательному смещению зубчатой рейки относительно корпусного элемента или же щечки рукоятки. За счет этого дополнительно упрощается передача усилия, при этом можно сэкономить на дополнительных деталях, что понижает затраты.
В усовершенствованном варианте первый/второй функциональный узел, прежде всего режущее устройство и/или удерживающее устройство, за счет приведения в действие элемента управления, предпочтительно в любом положении в пределах соответствующего частичного диапазона и/или активно, является перемещаемым в двух разных направлениях. Это дополнительно облегчает управление хирургическим инструментом.
В одном конкретном конструктивном варианте по меньшей мере один третий функциональный узел, например коагуляционное устройство, является приводимым в действие еще одним (отдельным) элементом управления. Благодаря этому еще одна функция, например коагулирование, может происходить независимо от управления первым или вторым функциональным узлом. Это облегчает управление.
Кроме того, элемент управления для упрощения управления может содержать ручной спусковой механизм.
Элемент управления может быть вращаемым вокруг по меньшей мере двух разнесенных друг от друга осей вращения. За счет такого изменения оси вращения один и тот же элемент управления может особенно просто прилагать усилие к различным компонентам.
В одном конкретном конструктивном варианте элемент управления приведения в действие первого функционального узла выполнен с возможностью вращения вокруг первой оси, а приведения в действие второго функционального узла - вокруг второй оси. Пересоединение может содержать смещение осей вращения. Управление отдельными функциональными узлами в этом случае связано лишь с незначительными конструктивными затратами.
Предпочтительно, вторая ось вращения лежит на центральной оси коленчато-рычажного шарнира. В качестве альтернативы или дополнительно первая/вторая ось вращения может быть расположена внутри направляющей, прежде всего, внутри более короткой полки U-/V-образной направляющей. При необходимости, во время вращения может иметь место по меньшей мере незначительное поступательное перемещение, так что ось вращения во время вращения смещается. Смещение в этом случае составляет, предпочтительно, менее 5 мм, еще более предпочтительно менее 3 мм. Если элемент управления выполнен с возможностью вращения вокруг центральной оси коленчато-рычажного шарнира, управление соответствующим функциональным узлом может происходить особенно просто.
Предпочтительно, элемент управления выполнен с возможностью вращения и может, прежде всего через коленчато-рычажный шарнир, приводить в поступательное перемещение скользящее устройство. Скользящее устройство может инициировать определенную функцию, прежде всего через соединительные элементы, такие как например, шатун, и уменьшает затраты при изготовлении.
В одном конкретном конструктивном варианте предусмотрен по меньшей мере один пружинный элемент таким образом, что усилие элемента управления через пружинный элемент может быть передано на первый/второй функциональный узел. Благодаря промежуточному включению пружинного элемента усилие элемента управления может демпфировано или аккумулировано. Кроме того, такой пружинный элемент может оказывать нажим на первый/второй функциональный узел, когда первый/второй функциональный узел находится в застопоренном положении. Например, если функциональный узел является удерживающим устройством, ткань может удерживаться надежно и с константной силой без необходимости каких-либо действий для этого со стороны пользователя.
Предпочтительно, по меньшей мере один пружинный элемент, предпочтительно натяжная пружина, предусмотрен таким образом, что пружинный элемент при смещении функционального узла воздействует на него силой возврата. Такой пружинный элемент позволяет простым образом инициировать или же деактивировать соответствующую функцию, например, удерживание ткани, без активного удерживания со стороны пользователя.
Предпочтительно, элемент управления выполнен таким образом, что перемещение в пределах первого частичного диапазона и/или второго частичного диапазона и/или пересоединительного диапазона является реализуемым в одной плоскости. За счет этого уменьшается трудоемкость при применении.
Предпочтительно, пересоединительное устройство и/или стопорящее устройство выполнены реверсивными таким образом, что реверсирование перемещения элемента управления приводит к возвращающему в исходное состояние пересоединению или же к отмене стопорения. Это облегчает манипулирование инструментом.
В целом, хирургический инструмент обеспечивает возможность эргономичной и эффективной работы. В результате (механического) разъединения частичных диапазонов никакие усилия не передаются на соответственно другой функциональный узел или элемент управления. Например, сначала для захвата ткани (вообще, для приведения в действие первого функционального узла) пользователь хотя и должен приложить усилие, но после стопорения во втором частичном диапазоне он может работать независимо от этой силы закрывания (силы). Функции могут быть реализованы одними и теми же «частями тела» (например, средним пальцем и/или безымянным пальцем и/или мизинцем), при этом другие «части тела» остаются свободными для управления. Например, указательный палец при управлении режущим устройством может оставаться свободным, так что он, аналогично спусковому курку пистолета, может быть использован для управления коагуляционным переключателем.
Дополнительные преимущества возникают при использовании изобретения в комбинированном коагуляционно-режущем инструменте. Закрывание зева захватного устройства и резание режущим устройством могут оба происходить в направлении закрывания ручного спускового механизма. Возврат ножа в исходное положение, разблокирование и открывание зева могут происходить в противоположном направлении. Это обеспечивает возможность быстрой последовательности стадий: захват, коагулирование и резание. Также возможно сравнительно быстрое резание ткани без коагулирования, с помощью только одного элемента управления, аналогично ножницам. Коленчато-рычажная система обеспечивает возможность возврата ножа, разблокирование стопорения и открывание зева в одном направлении перемещения. Таким образом коагуляция может быть выполнена многократно и сравнительно надежно, также и без разреза. Инструмент предлагает хорошую функцию препарирования, так как зев может быть активно открыт пользователем и неизбежно не зависит от пружины.
Для коагулирования может быть предусмотрен отдельный элемент управления, при необходимости, без приданного механического функционального узла. Для коагулирования может быть предусмотрен электрохирургический генератор, который генерирует ток высокой частоты, который посредством инструмента проводится через захваченную ткань. Ток высокой частоты может быть применен в монополярном или биполярном режиме. Сигнал для коагуляции происходит, как правило, посредством пальцевого выключателя, при необходимости также на рукоятке, или посредством ножного выключателя.
Другие конструктивные варианты следуют из зависимых пунктов формулы изобретения.
Далее изобретение, также относительно других недостатков и преимуществ, описывается на конструктивном примере, который более детально поясняется на чертежах, на которых:
фиг.1: электрохирургический инструмент в виде сбоку согласно первому варианту осуществления изобретения,
фиг.2 электрохирургический инструмент в первом внутреннем виде,
фиг.3 электрохирургический инструмент в первом виде в разрезе,
фиг.4 электрохирургический инструмент во втором внутреннем виде,
фиг.5 электрохирургический инструмент во втором виде в разрезе,
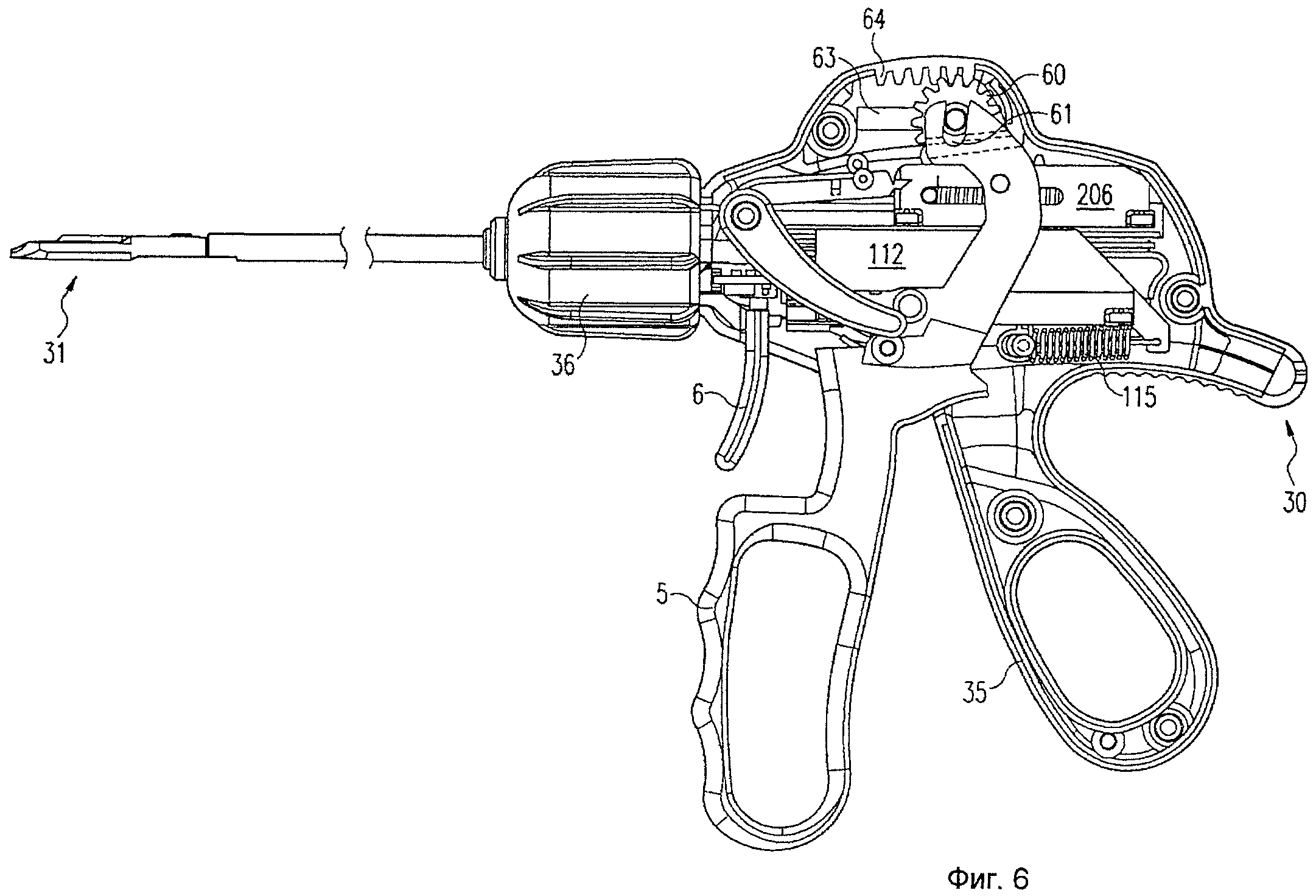
фиг.6 электрохирургический инструмент в третьем внутреннем виде,
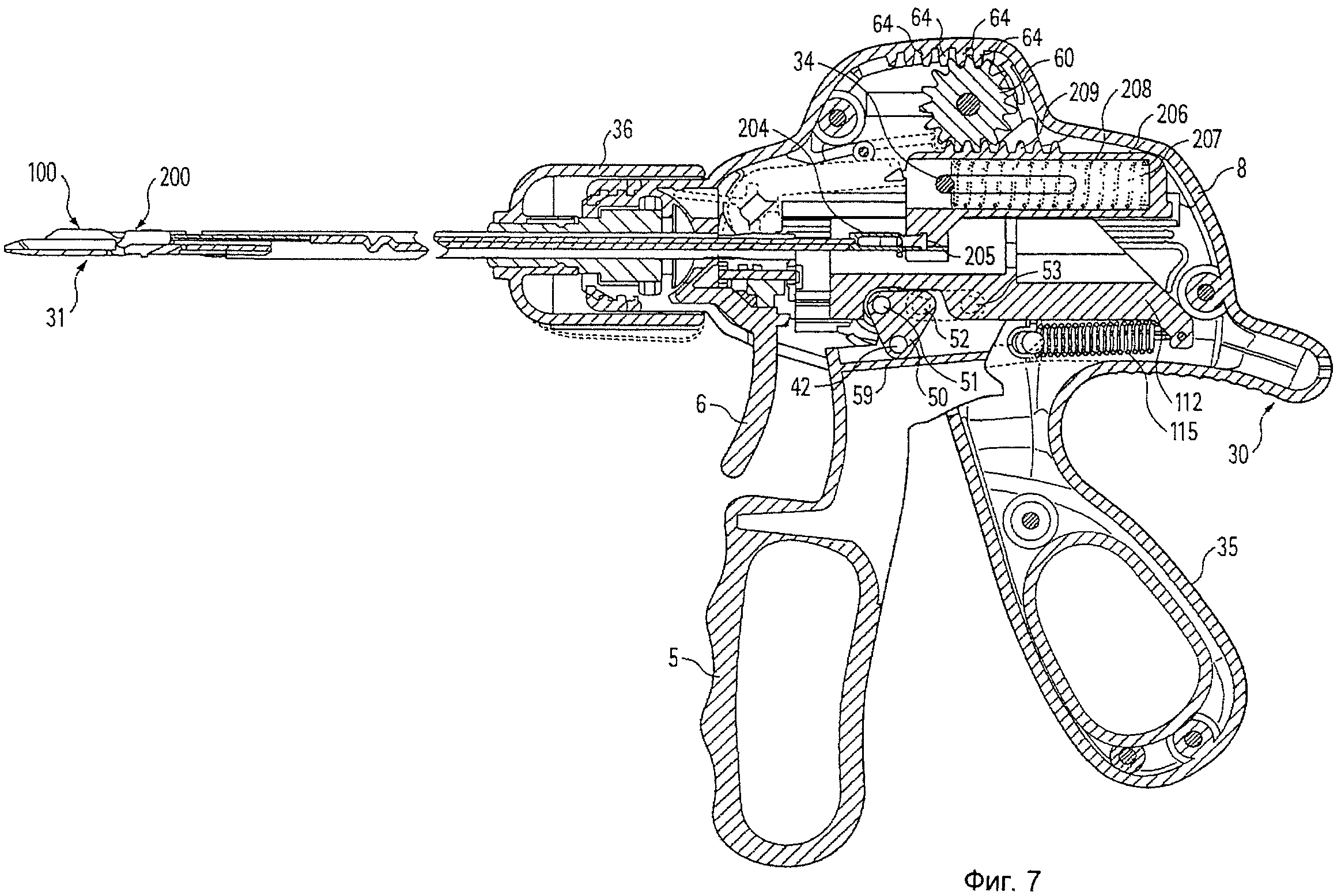
фиг.7 электрохирургический инструмент в третьем виде в разрезе,
фиг.8 электрохирургический инструмент в четвертом внутреннем виде,
фиг.9 электрохирургический инструмент в четвертом виде в разрезе,
фиг.10: щечка рукоятки электрохирургического инструмента во внутреннем виде.
В нижеследующем описании для одинаковых или одинаково действующих деталей используются одни и те же ссылочные обозначения.
На фиг.1 показан электрохирургический инструмент в виде сбоку, который выполнен для захвата ткани (первая функция), для коагулирования (третья функция) и для резания (вторая функция). Захват и резание ткани происходит посредством общего элемента 5 управления, конкретно ручного спускового механизма. Коагуляция управляется посредством второго элемента 6 управления, конкретно пальцевого спускового механизма. Ручной спусковой механизм 5 и пальцевой спусковой механизм 6 расположены подвижно относительно корпуса 7 рукоятки, который имеет две противолежащих щечки 8 рукоятки.
На фиг.2 и фиг.3 показаны виды электрохирургического инструмента, при этом ручной спусковой механизм 5 расположен в первом положении. Ручной спусковой механизм 5 служит для приведения в действие как захватного устройства 100 (в качестве первого функционального узла), так и режущего устройства 200 (в качестве второго функционального узла).
Захватное устройство 100 содержит зев 101, на котором расположен шток захватного устройства или проволока 102 захватного устройства, так что растягивающее перемещение в направлении проксимального конца 30 имеет следствием перемещение закрывания зева 101, и наоборот, сдвиговое перемещение в направлении дистального конца 31 - открывание зева 101. Здесь и в последующем под проксимальным элементом/участком подразумевается элемент/участок, который находится дальше от зева 101, чем соответствующий дистальный элемент или же соответствующий проксимальный участок.
Кроме того, захватное устройство 100 содержит растягивающую гильзу 104, которая соединена с проксимальным концом проволоки 102 захватного устройства. Растягивающая гильза 104 на проксимальном конце 105 соединена с тарелкой 106 пружины (например, с помощью резьбы). На дистальном конце 107 растягивающей гильзы 104 она (со способностью к скольжению) установлена в гильзе 108 (резьбовая гильза) и, проксимально примыкая к ней, во второй тарелке 109 пружины. Между первой тарелкой 106 пружины и второй тарелкой 109 пружины расположен первый пружинный элемент 110 (конкретно винтовая пружина).
Растягивающая гильза 104, первая тарелка 106 пружины, вторая тарелка 109 пружины и первый пружинный элемент 110, в свою очередь, установлены в выемке 111 передаточного элемента 112 со способностью скольжения. Передаточный элемент 112 установлен с возможностью скольжения внутри щечек 8 рукоятки, конкретно внутри выполненных на ней выемок 32 щечек рукоятки. Для установки передаточного элемента 112 со способностью скольжения служат цапфы 113 передаточного элемента, которые установлены в имеющих вид направляющих выемках 32 щечки рукоятки (см. фиг.2).
Кроме того, передаточный элемент 112 имеет упор 114 передаточного элемента (при необходимости, несколько), который при перемещении передаточного элемента 112 в проксимальном направлении производит усилие на дистальный конец второй тарелки 109 пружины, которая, в свою очередь, опосредованно через первый пружинный элемент 110, первую тарелку 106 пружины и растягивающую гильзу 104 производит растягивающее усилие на проволоку 102 захватного устройства в проксимальном направлении.
Действующая на проволоку 102 захватного устройства растягивающая сила приводит к закрыванию зева 101 до тех пор, пока он либо не будет полностью закрытым, либо не будет прилегать к подлежащей захвату ткани. Отклонения толщины ткани могут быть конструктивно особенно просто компенсированы без того, чтобы ткань захватывалась слишком слабо или слишком сильно. Таким образом, пружинный элемент также имеет функцию накопления энергии, так что пользователю конструктивно простым образом облегчается управление инструментом.
Натяжная пружина 115 (конкретно, винтовая натяжная пружина) с одной стороны навешена на щечках 8 рукоятки или же на расположенных на них штифтах 33 щечки рукоятки, а с другой стороны на проксимальном конце 116 передаточного элемента 112 таким образом, что смещению передаточного элемента 112 в проксимальном направлении противодействует сила натяжной пружины 115. Тем самым, в положении согласно фиг.2 и фиг.3 может быть особенно просто обеспечено автоматическое открывание зева 101. Это облегчает управление электрохирургическим инструментом.
Режущее устройство 200 содержит нож 201, который соединен со штоком режущего устройства или проволокой 202 режущего устройства. Проксимальный конец 203 проволоки 202 режущего устройства (через резьбовую гильзу 204 и штифт 205) соединен с передаточным элементом 206. Следствием этого является то, что смещение передаточного элемента 206 в дистальном направлении посредством проволоки 202 режущего устройства ведет к смещению ноже 201 в дистальном направлении, так что удерживаемая в зеве 101 ткань может быть рассечена. В выемке 207 передаточного элемента расположен второй пружинный элемент 208, при этом Проксимальный конец второго пружинного элемента 208 упирается в Проксимальный конец передаточного элемента 206, а дистальный конец второго пружинного элемента 208 упирается в штифт 34, который неподвижно (например, приформован как неотъемлемая составная часть) соединен со щечками 8 рукоятки.
Кроме того, щечки 8 рукоятки образуют элемент 35 рукоятки, например для приема большого пальца руки пользователя. Кроме того, предусмотрен вращающий элемент 36, с помощью которого зев 101 и/или нож 201 могут быть повернуты.
В положении электрохирургического инструмента на фигурах 2 и 3 посредством закрывающего перемещения ручного спускового механизма 5 усилие через коленчато-рычажное устройство 37 может быть передано на передаточный элемент 112, так что он перемещается в проксимальном направлении, и зев 101 закрывается. Коленчато-рычажное устройство 37 содержит (выполненную по существу в виде треугольника) коленчато-рычажную пластину 38. Коленчато-рычажная пластина 38 содержит первое отверстие 39 коленчато-рычажной пластины и второе отверстие 40 коленчато-рычажной пластины, а также штифты 41 коленчато-рычажной пластины (на фиг.3 обозначенные пунктиром). В первом отверстии коленчато-рычажной пластины установлен неподвижно соединенный с ручным спусковым механизмом 5 штифт 42 ручного спускового механизма. Во втором отверстии 40 коленчато-рычажной пластины установлен неподвижно соединенный со щечками 8 рукоятки штифт 43 щечки рукоятки. (Выступающие наружу) штифты 41 коленчато-рычажной пластины установлены в выемке 44 передаточной пластины первой передаточной пластины 45, а также выемке 46 второй передаточной пластины 47 (обозначены пунктиром). Выемка 44, 46 передаточной пластины или же передаточные пластины 45, 47 на фигурах расположены друг над другом. Передаточные пластины 45, 47 имеют вторые выемки 48, 49 передаточной пластины (на фиг.3 обозначены пунктиром), которые проведены через неподвижно соединенные с передаточным элементом 112 штифты 117.
Таким образом, в целом, коленчато-рычажное устройство 37 содержит первый коленчато-рычажный шарнир 50, содержащий первое отверстие 39 коленчато-рычажной пластины 39 и штифт ручного спускового механизма 42, второй коленчато-рычажный шарнир 51, содержащий второе отверстие 40 коленчато-рычажной пластины и штифт 43 щечки рукоятки, третий коленчато-рычажный шарнир 52, содержащий штифты 41 коленчато-рычажной пластины и выемки 44, 46 передаточной пластины, и четвертый коленчато-рычажный шарнир 53, содержащий вторые выемки 48, 49 передаточной пластины и штифты 117 передаточного элемента 112. Коленчато-рычажные шарниры 50 - 53 также могут быть выполнены отличными от представленной здесь конструкции.
Первый коленчато-рычажный шарнир 50 является неподвижным относительно ручного спускового механизма 5, второй коленчато-рычажный шарнир 51 является неподвижным относительно щечек 8 рукоятки, четвертый коленчато-рычажный шарнир 53 является неподвижным относительно передаточного элемента 112, в то время как третий коленчато-рычажный шарнир 52 является подвижным относительно ручного спускового механизма 5, щечек 8 рукоятки и передаточного элемента 112.
Ручной спусковой механизм 5 имеет один (или несколько) штифт 54 ручного спускового механизма (см. фиг.2), который удерживается в V-образной выемке 55 с более короткой полкой 56 и более длинной полкой 57 (см. фиг.10). В положении на фигурах 2 и 3 штифт 54 ручного спускового механизма удерживается в более короткой полке 56 и стопорится ею. Тем самым, закрывающее перемещение ручного спускового механизма 5 ведет к вращению ручного спускового механизма 5 вокруг первой оси 58 вращения (см. фиг.2), которая определяется штифтом 54 ручного спускового механизма. Вследствие вращения вокруг первой оси 58 вращения передаточные пластины 45, 47 вытягиваются относительно коленчато-рычажной пластины 38 (см. фиг.5) до тех пор, пока не будет достигнуто или же слегка пройдено положение мертвой точки (см. фиг.7), и коленчато-рычажное устройство 37 не будет застопорено. При этом мертвая точка пройдена, когда второй, третий и четвертый шарнир 51, 52, 53 расположены на одной линии. В положении на фигурах 6 и 7 натяжная пружина 115 также не может отвести назад передаточный элемент 112. При этом надежный и сравнительно легко регулируемый захват (не показанной) ткани является возможным простым образом.
Мертвая точка достигается, например, когда соединительная линия между третьим и четвертым коленчато-рычажным шарниром 52, 53 расположена (примерно) вертикально соединительной линии между первым и вторым коленчато-рычажным шарниром 50, 51 (это положение является промежуточным положением между положением на фигурах 4 и 5, с одной стороны, и фигурам 6 и 7, с другой стороны).
V-образная выемка 55 расположена и выполнена таким образом, что штифт 54 ручного спускового механизма в положении на фигурах 7 и 8 больше не является застопоренным (или же стопорение ликвидировано). Таким образом, в положении на фигурах 7 и 8 ручной спусковой механизм 5 может вращаться вокруг второй оси 59 вращения, которая определена штифтом 42 ручного спускового механизма. Тогда дальнейшее закрывание ручного спускового механизма 5 приводит к вращению ручного спускового механизма 5 вокруг второй оси 59 вращения, так что шестерня 60, которая установлена внутри (проходящей радиально, продолговатой) выемки 61 ручного спускового механизма, может скользить (в дистальном направлении) вдоль продолговатой выемки 63 щечки рукоятки (при этом на одной или обеих щечках 8 рукоятки может быть предусмотрена соответствующая выемка 63 щечки рукоятки). При этом штифт 54 ручного спускового механизма скользит в (слегка искривленной) полке 57 V-образной выемки 55. Для компенсации слегка искривленной направляющей V-образной выемки, выемка 61 ручного спускового механизма выполнена продолговатой, так что шестерня 60 является смещаемой в радиальном направлении внутри выемки 61 ручного спускового механизма.
Таким образом, исходя из положения на фигурах 6 и 7, шестерня 60 смещается в дистальном направлении до конечного положения на фигурах 8 и 9 внутри продолговатой выемки 63 щечек рукоятки. За счет выполнения зубьев 64 щечек рукоятки шестерня 60 в результате смещения приводится во вращение и может смещать передаточный элемент 206, который имеет зубья 209 передаточного элемента 209, также в дистальном направлении. При этом посредством проволоки 202 режущего устройства нож 201 смещается в дистальном направлении для рассекания ткани. За счет расположения шестерни 60 между зубьями 64 щечки рукоятки и зубьями 209 передаточного элемента передаточный элемент 206 в результате сравнительно незначительного смещения шестерни 60 или же сравнительно незначительного вращения ручного спускового механизма 5 вокруг второй оси 59 вращения может быть перемещен на сравнительно большое расстояние. Это облегчает управление электрохирургическим инструментом.
Положение на фигурах 6 и 7, с одной стороны, и на фигурах 8 и 9, с другой стороны, определяют по меньшей мере один участок второго частичного диапазона перемещения ручного спускового механизма 5, на котором приводится в действие исключительно режущее устройство 200. В пределах первого частичного диапазона перемещения, который по меньшей мере участками определяется положениями на фигурах 2 и 3, с одной стороны, и фигурах 4 и 5, с другой стороны, может управляться только захватное устройство 100. Положением хирургического инструмента на фигурах 4 и 5, с одной стороны, и фигурах 6 и 7, с другой стороны, определяется пересоединительный диапазон, в пределах которого при закрывании ручного спускового механизма 5 устанавливается стопорение захватного устройства 100, и ликвидируется стопорение режущего устройства 200.
Третий функциональный узел, конкретно коагуляционный функциональный узел, посредством второго элемента управления (пальцевого спускового устройства) 6 может управляться отдельно от ручного спускового устройства 5.
Захватное устройство 100 может как угодно в одну и другую сторону перемещаться в первом частичном диапазоне, режущее устройство 200 может как угодно в одну и другую сторону перемещаться во втором частичном диапазоне, что дополнительно улучшает управляемость. Прежде всего, при резании ткани является особенно благоприятным, если нож 201 для рассекания может перемещаться в одну и другую сторону, следствием чего является сравнительно гладкая кромка реза. И при захвате ткани обеспечивается то, что в любом положении зев 101 может быть больше открыт или больше закрыт. В качестве альтернативы, также является возможным (в отличие от показанного конструктивного варианта) предусмотреть дополнительные фиксирующие средства, которые также в пределах первого или же второго частичного диапазона разрешают стопорение, так что при определенных дискретных положениях является возможным только перемещение в одном направлении.
Для захвата и коагулирования ткани служат две половины зева 101. В первом частичном диапазоне половины зева могут открываться и закрываться. Если кистевой спусковой механизм взводится, например путем закрывающего перемещения руки пользователя, через захватное устройство 100 зев 101 закрывается. Таким образом ткань может быть захвачена и коагулирована. При этом для коагулирования неизбежно не требуется механического функционального узла.
Если ручной спусковой механизм 5 взводится за определенную точку, захватное устройство 100 фиксируется, а зев 101 остается в закрытом состоянии. Для фиксации согласно одному конкретному конструктивному варианту служит коленчато-рычажное устройство 37. Если ручной спусковой механизм 5 находится во втором частичном диапазоне и, тем самым, приводит в действие режущее устройство 200, он отсоединяется от первого частичного диапазона или же захватного устройства 100. Если ручной спусковой механизм 5 во втором частичном диапазоне взводится дальше, режущее устройство 200 двигает нож 201 в дистальном направлении через зажатую ткань и рассекает ее. Если ручной спусковой механизм снова перемещается назад в направлении точки фиксации, нож 201 снова отводится назад. Если ручной спусковой механизм 5 выводится дальше точки фиксации, фиксация снимается, и половины зева могут быть открыты.
В общем, первый функциональный узел является, предпочтительно, приводимым в действие посредством растягивания коленчато-рычажного шарнира, а второй функциональный узел - вращением вокруг второй оси вращения. Тем самым, простым образом при пересоединении происходит переход от растягивающего перемещения к сдвиговому движению, при этом пользователю не нужно производить смены направления при управлении с помощью элемента управления, что облегчает манипулирование инструментом.
Предпочтительно, проволока 102 захватного устройства и/или проволока 202 режущего устройства направлены в трубчатом стержне 68.
В этом месте следует указать на то, что все вышеописанные детали, при рассмотрении в отдельности и в любой комбинации, прежде всего указанные на чертежах детали, заявляются как изобретение. Их видоизменения являются известными специалисту.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
Реферат
Изобретение относится к медицине. Хирургический инструмент прежде содержит с элемент управления для приведения в действие по меньшей мере первого и второго функционального узла, который выполнен с возможностью приведения в поступательное и/или вращательное перемещение в пределах диапазона перемещения. Предусмотрено соединительное устройство. Вследствие перемещения элемента управления через пересоединительный диапазон между первым и вторым частичным диапазоном может быть прервана кинематическая связь между первым функциональным узлом и элементом управления и установлена кинематическая связь между вторым функциональным узлом и элементом управления. 14 з.п. ф-лы, 10 ил.
Комментарии