Кольцо для подшипника узла привода морского средства передвижения, включающее сегментированную рабочую часть - RU2747608C1
Код документа: RU2747608C1
Чертежи
Описание
[0001] Предложенное изобретение относится к узлам привода морских средств передвижения, таких суда, подводные лодки или даже нефтяные платформы. В частности, настоящее изобретение относится к узлам привода, устанавливаемым на платформах.
[0002] Указанные узлы привода, также известные как «направленная движительная система» (propulsion oriented drive) или «POD», как правило, включают:
- подвижный корпус или подвижное основание, механически соединенное с морским средством передвижения при помощи поворотного соединения, выполненного с возможностью поворота вокруг оси, например такой, как ось рыскания средства передвижения,
- приводной вал, проходящий в соответствии с продольным направлением подвижного корпуса и механически соединенный с морским средством передвижения при помощи поворотного соединения, выполненного с возможностью поворота вокруг своей собственной оси, и
- приводной элемент, такой как гребной винт или ротор насоса, установленный на приводном валу.
[0003] Как правило, для создания поворотного соединения, механически соединяющего приводной вал и приводной элемент, на обоих концах приводного вала установлены два подшипника вала. Эти два подшипника предназначены для удержания приводного вала в его радиальном направлении, другими словами, в радиальной ориентации. Например, подшипники могут представлять собой подшипники скольжения, имеющие два кольца, прикрепленные к подвижному корпусу и приводному валу, соответственно. Одно из двух колец имеет цилиндрическую часть, обеспечивающую функцию скользящего контакта с поверхностью скольжения, выполненной на другом кольце.
[0004] Кроме того, один из двух подшипников предназначен для обеспечения функции опоры приводного вала в его осевом направлении, то есть, осевой ориентации. Для этого, одно из соответствующих колец, связанных с валом, имеет переднюю рабочую часть, выполняющую функцию скользящего контакта с поверхностью скольжения, установленной на осевом упоре подшипника привода.
[0005] Как правило, для продления срока службы подшипника вала необходимо регулярно заменять его рабочие части.
[0006] Для этого узел привода может быть снят с морского средства передвижения и транспортирован в ремонтную мастерскую. Там оператор имеет место и инструменты, необходимые для вскрытия подшипников приводного вала, отсоединения рабочих частей и замены их новыми рабочими частями. Однако такое решение требует размещения морского средства передвижения в сухих доках на время, необходимое для выполнения замены рабочих частей.
[0007] Для устранения указанной проблемы, конструкция, выполненная в подвижном корпусе, обеспечивает возможность оператору входить и работать внутри подвижного корпуса узла привода. В данном случае необязательно разбирать узел привода и размещать морское средство передвижения в сухих доках.
[0008] Однако, работа, выполняемая оператором внутри подвижного корпуса, обычно сопряжена с трудностями, если вообще выполнима, вследствие малого пространства и его загромождения подшипниками приводного вала и другими элементами, такими как электродвигатель приводного вала движителя. Данная трудность еще более усугубляется на конце подшипника, обеспечивающего как функцию радиальной опоры, так и функцию осевой опоры приводного вала.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] В свете вышеизложенного, для устранения указанных недостатков в изобретении предложен подшипник гребного вала или комплектующая деталь подшипника вала.
[0010] В частности, изобретение обеспечивает возможность более легкого монтажа или демонтажа рабочих частей подшипника вала, включая случаи, когда такой подшипник сочетает функции радиальной и осевой ориентации.
[0011] Для этого предложено кольцо для подшипника вала узла привода морского средства передвижения, включающее кольцевой корпус, цилиндрическую рабочую часть, предназначенную для обеспечения функции скользящего контакта с другим кольцом подшипника вала.
[0012] Согласно главной особенности данного кольца, цилиндрическая рабочая часть сегментирована на множество цилиндрических поверхностей, при этом каждая цилиндрическая поверхность прикреплена с возможностью отсоединения к кольцевому корпусу.
[0013] Использование сегментированной цилиндрической рабочей части упрощает выполнение монтажа и демонтажа техническим персоналом, особенно при работе в ограниченных пространствах, например, внутри подвижного корпуса.
[0014] Предпочтительно, кольцо, включающее сегментированную рабочую часть, выполнено с возможностью перемещения относительно корпуса узла привода. Например, кольцо может быть прикреплено к приводному валу. В данном случае другое кольцо, предпочтительно, зафиксировано относительно корпуса. Данное условие является особенно предпочтительным, поскольку облегчает демонтаж рабочих частей.
[0015] Согласно одному варианту выполнения, кольцевой корпус сегментирован на несколько секторных модулей, выполненных с возможностью выдвижения, при этом каждый секторный модуль имеет часть цилиндрической поверхности цилиндрического рабочего компонента.
[0016] Используя такое кольцо, оператор может инициировать перемещение одного из секторных модулей в положение, в котором обеспечен доступ к цилиндрической поверхности, что облегчает демонтаж указанной поверхности.
[0017] Кроме того, следует отметить, что каждый секторный модуль выполнен с возможностью перемещения относительно других модулей в осевом направлении кольца.
[0018] Согласно одному варианту выполнения, каждый секторный модуль включает опору и радиальный буферный элемент, который имеет цилиндрическую поверхность и может быть отсоединен от опоры.
[0019] Также предпочтительно наличие цилиндрической обоймы, содержащей по две штанги для каждого секторного модуля, направленные в соответствии с осевым направлением кольца, причем каждый секторный модуль имеет два сквозных отверстия, при этом каждая штанга вставлена в сквозное отверстие соответствующего секторного модуля с обеспечением возможности ее скольжения внутри отверстия.
[0020] Согласно одному варианту выполнения, все секторные модули проходят между двумя дугами окружности, ограниченными одинаковым углом относительно центра.
[0021] Центральный угловой интервал, преимущественно, составляет от 20° до 40° и более предпочтительно от 25° до 35°.
[0022] Конструкция секторных модулей с центральным углом, идеально позиционированным в таких диапазонах около 30°, предпочтительна тем, что цилиндрические поверхности являются достаточно небольшими, обеспечивая удобство извлечения модулей, и их количество не слишком велико, поэтому не слишком увеличивает время работы оператора.
[0023] Согласно одному варианту выполнения, кольцо имеет переднюю рабочую часть, предназначенную для обеспечения функции скользящего контакта с осевым упором подшипника вала, при этом передняя рабочая часть сегментирована на несколько передних поверхностей, каждая из которых прикреплена с возможностью отсоединения к кольцевому корпусу.
[0024] Такое кольцо обеспечивает функции как радиального, так и осевого направления, и при этом образует уменьшенную площадь основания, а также упрощает демонтаж передней и цилиндрической рабочих частей.
[0025] Кольцевой корпус, предпочтительно, сегментирован на несколько секторных модулей, выполненных с возможностью выдвижения, каждый из которых имеет переднюю поверхность, при этом передняя поверхность является элементом передней рабочей части.
[0026] Предпочтительно, каждый секторный модуль выполнен с возможностью перемещения между положением, в котором соответствующий секторный модуль расположен в осевом направлении с одной стороны передней рабочей части, и положением, в котором соответствующий секторный модуль расположен в осевом направлении в пределах передней рабочей части.
[0027] Согласно одному варианту выполнения каждый секторный модуль включает опору и осевой буферный элемент, который имеет переднюю поверхность и который может быть отсоединен от опоры.
[0028] Кроме того, может быть выполнена вторая передняя рабочая часть для обеспечения функции скользящего контакта со вторым осевым упором подшипника вала, причем цилиндрическая рабочая часть расположена в осевом направлении между передними рабочими частями.
[0029] Согласно другому аспекту, подшипник вала предназначен для установки на валу узла привода водного средства передвижения и содержит одно внутреннее кольцо и одно наружное кольцо, при этом по меньшей мере одно из этих колец представляет собой вышеописанное кольцо.
[0030] Предпочтительно, внутреннее кольцо представляет собой кольцо, как описано выше согласно изобретению, а наружное кольцо представляет собой кольцо обычной конструкции. Целесообразность такого решения вытекает из того факта, что внутреннее кольцо чаще всего является подвижным кольцом, а наружное кольцо является фиксированным.
[0031] Согласно одному варианту выполнения, подшипник вала включает первый осевой упор и второй осевой упор, при этом первый осевой упор выполнен с возможностью перемещения в соответствии с осевым направлением подшипника и содержит первую переднюю рабочую часть, обеспечивающую функцию скользящего контакта с внутренним кольцом, причем внутреннее кольцо включает вторую переднюю рабочую часть, обеспечивающую функцию скользящего контакта со вторым осевым упором.
[0032] Согласно другому аспекту предложено применение подшипника, описанного выше, для демонтажа поверхности, образующей рабочую часть указанного подшипника.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0033] Другие цели, характеристики и преимущества изобретения станут более понятными после прочтения приведенного ниже описания, выполненного исключительно в качестве неограничивающего примера и со ссылкой на сопроводительные чертежи, на которых:
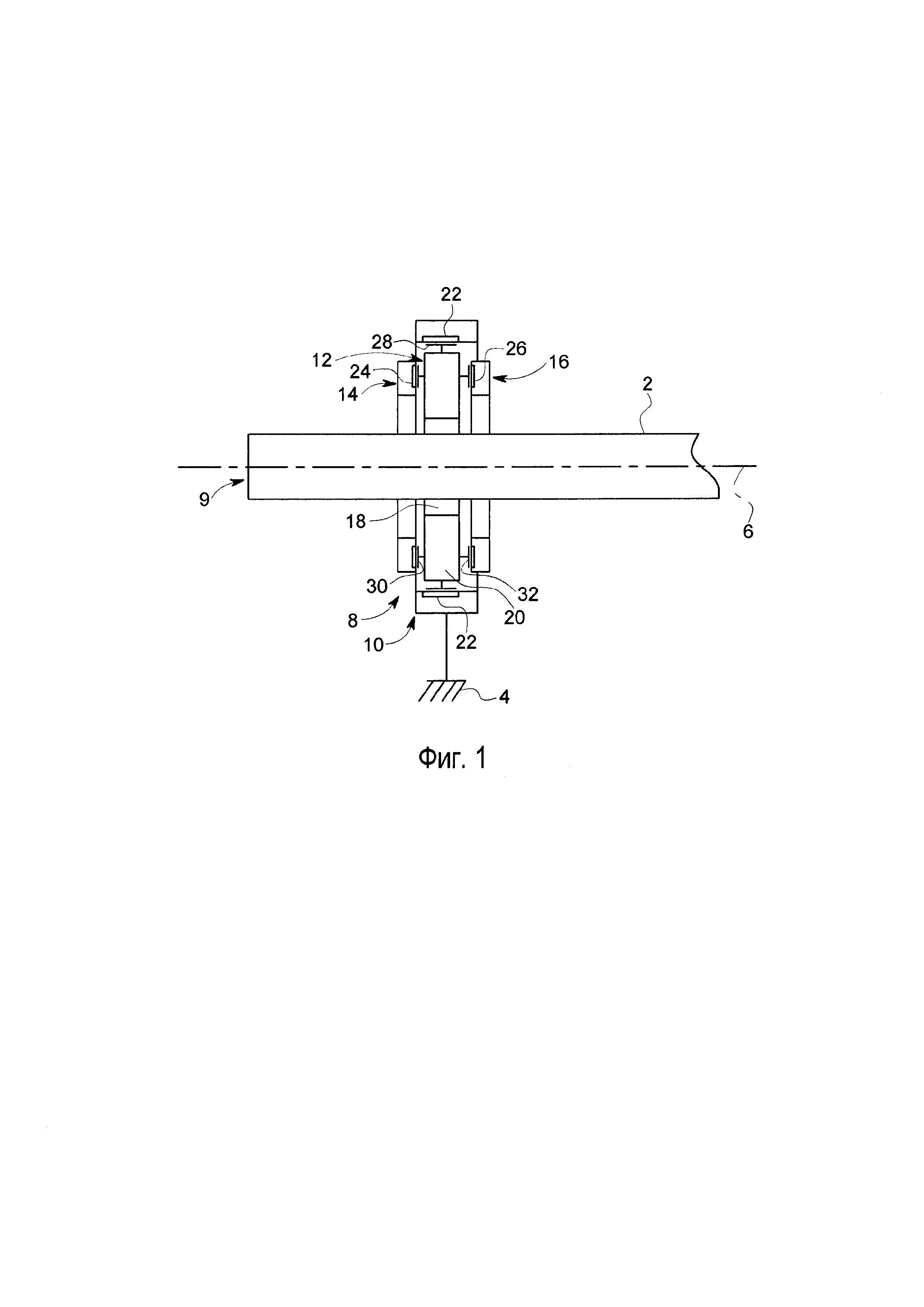
[0034] Фиг. 1 схематически изображает подшипник вала согласно первому варианту выполнения,
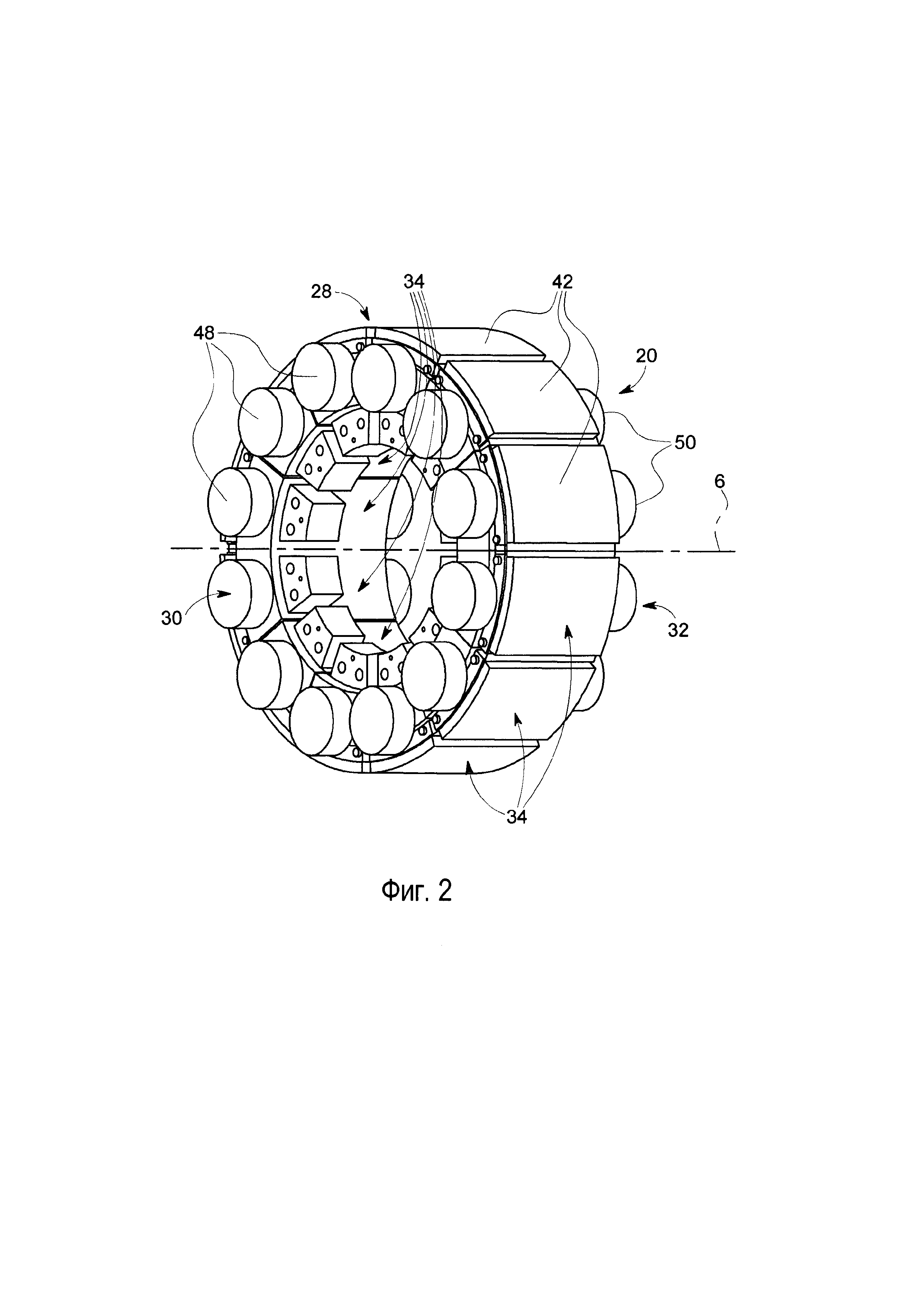
[0035] Фиг. 2 изображает вид в аксонометрии кольца подшипника, изображенного на Фиг. 1,
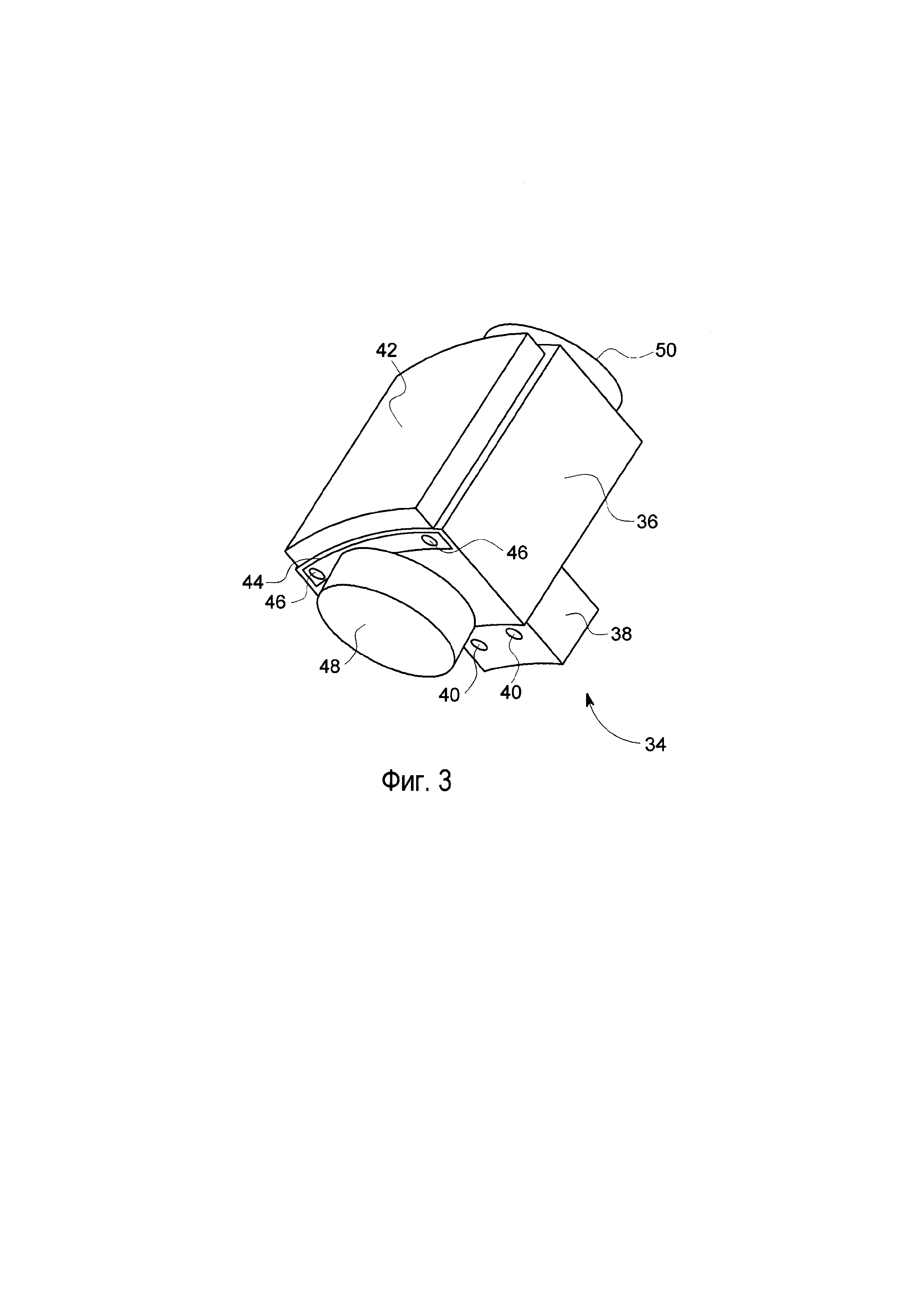
[0036] Фиг. 3 изображает вид в аксонометрии модуля кольца, показанного на Фиг. 2,
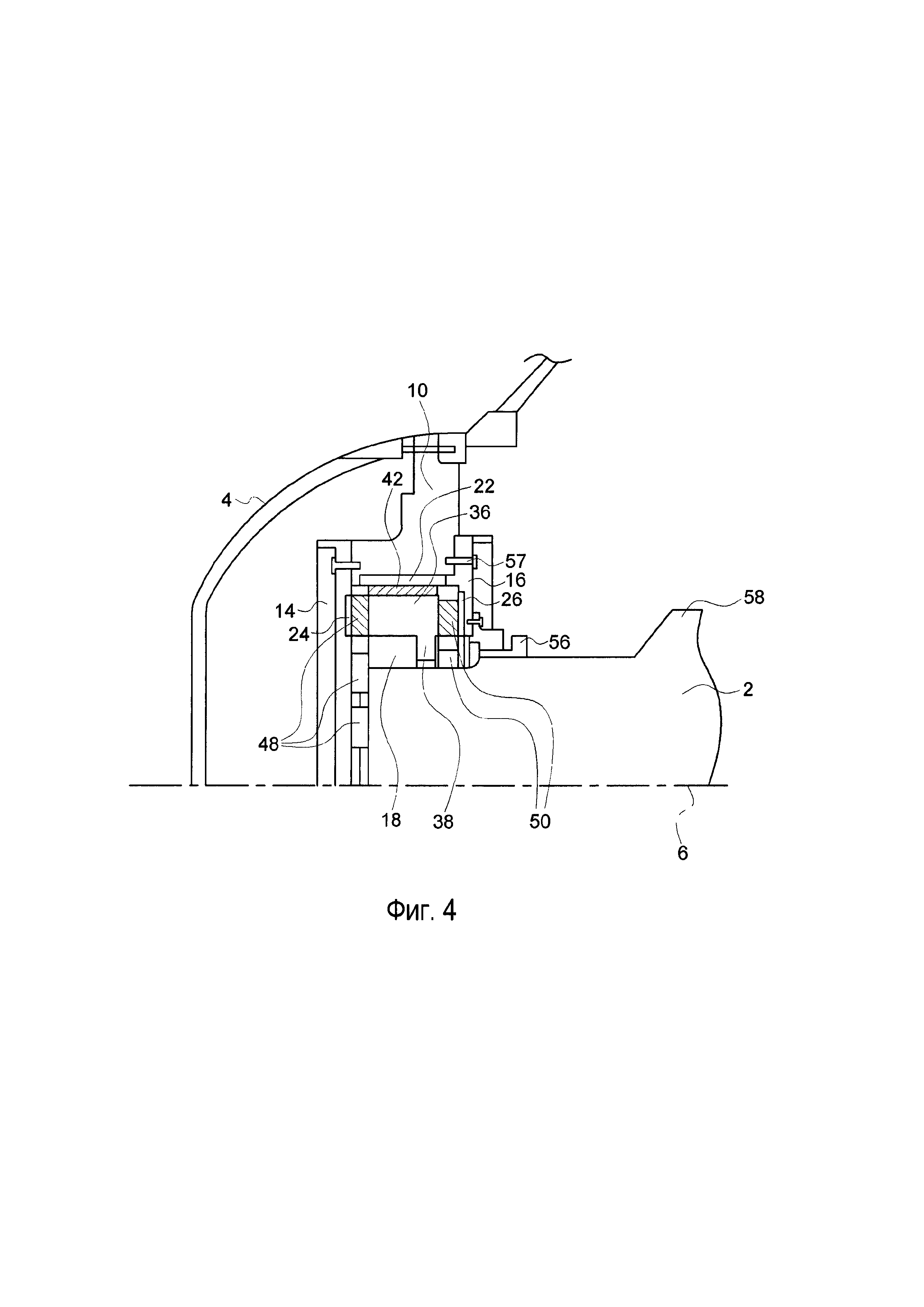
[0037] Фиг. 4 изображает осевой разрез кольца, показанного на Фиг. 2, при этом все секторные модули расположены в рабочем положении,
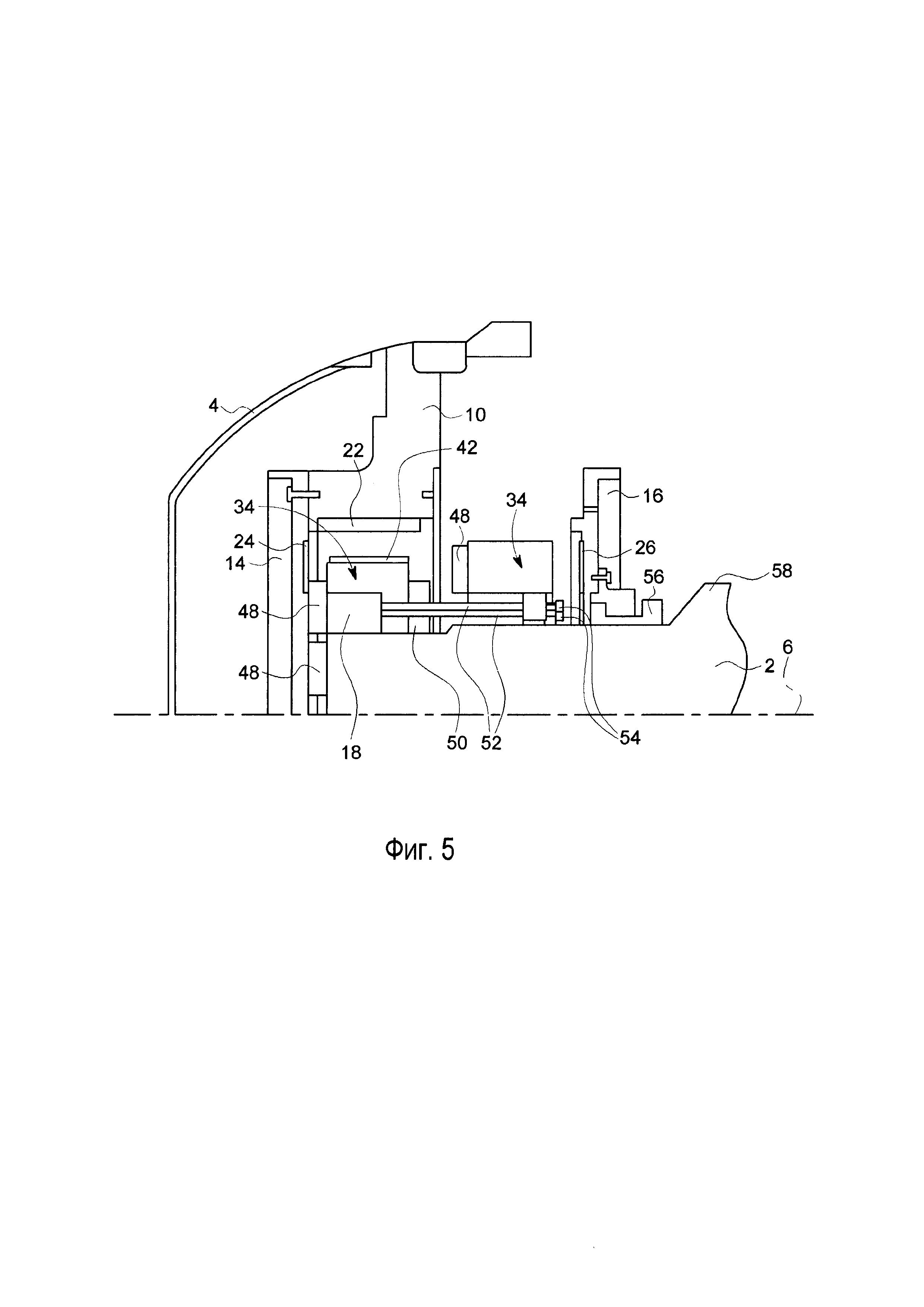
[0038] Фиг. 5 изображает осевой разрез кольца, показанного на Фиг. 2, при этом секторный модуль расположен в положении сборки/разборки, и
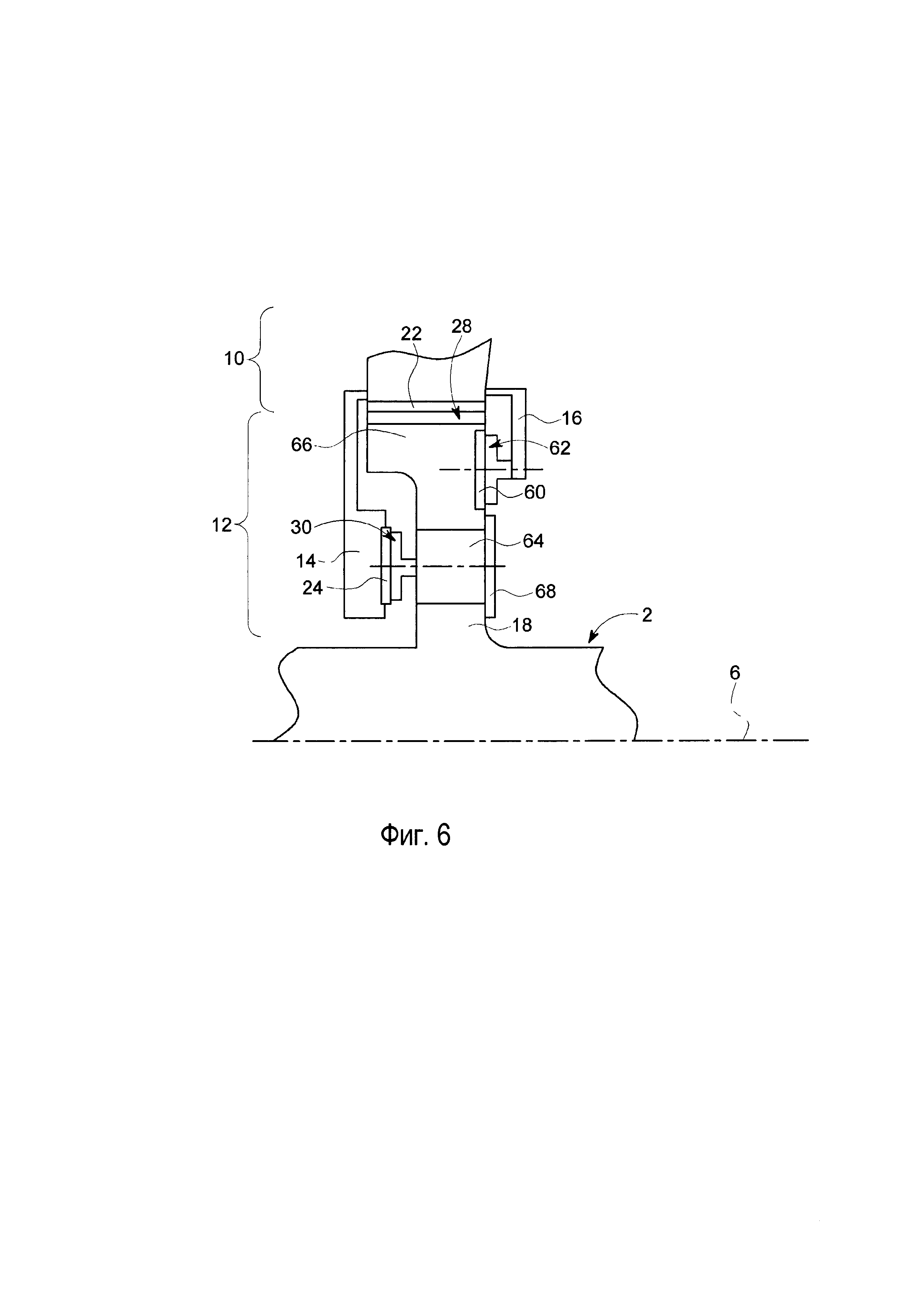
[0039] Фиг. 6 изображает осевой разрез кольца подшипника вала согласно второму примеру варианта выполнения изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0040] Со ссылкой на Фиг. 1 описан гребной вал 2, поддерживающий движительный элемент (не показано на чертеже) узла привода. Узел привода имеет подвижный корпус, схематически представленный на Фиг. 1 номером 4 позиции. Узел привода предназначен для установки на морском средстве передвижения (не показано на чертеже), которое может представлять собой судно, подводную лодку или нефтяную платформу. Приводной элемент, установленный на приводном валу 2, может представлять собой, например, гребной винт или ротор насоса.
[0041] Гребной вал 2 проходит в соответствии с осевым направлением 6 и механически соединен с подвижным корпусом 4 посредством поворотного звена, выполненного с возможностью поворота вокруг осевого направления 6. В проиллюстрированном варианте выполнения приводной вал 2 вращается посредством электрической машины (не показана на чертеже). Приводной вал 2 имеет один свободный конец 9 и противолежащий ему приводной конец (не показано на чертеже). Приводной конец соответствует тому концу вала 2, на котором установлен приводной элемент. Другими словами, свободный конец 9 соответствует концу вала 2, противоположному приводному элементу и электрической машине. Для обеспечения поворотного соединения вала 2 относительно корпуса 4, узел привода имеет подшипник 8 вала. Подшипник 8 обеспечивает взаимное направление вала 2 относительно корпуса 4 в соответствии с радиальным направлением относительно оси 6. Кроме того, подшипник 8 выполняет функцию осевого упора, предотвращая смещение вала 2 относительно корпуса 4 в соответствии с направлением оси 6.
[0042] Второй подшипник вала (не показан на чертеже) установлен на приводном конце гребного вала 2. Таким образом, два подшипника вала установлены на обоих концах вала 2, соответственно. Несмотря на то, что в варианте выполнения, показанном на Фиг. 1, подшипник 8, обеспечивающий двойную функцию радиального и осевого направления, установлен на свободном конце 9, положение двух подшипников может быть изменено на противоположное, без выхода за пределы объема изобретения.
[0043] Подшипник 8 содержит наружное кольцо 10, внутреннее кольцо 12, первый осевой упор 14 и второй осевой упор 16. Наружное кольцо 10 и осевой упор 14 отодвинуты от подвижного корпуса 4. Внутреннее кольцо 12 содержит цилиндрическую обойму 18 и кольцевой корпус 20, установленный на указанной обойме. Обойма 18 прикреплена к гребному валу 2. Например, обойма 18 может быть выполнена на валу 2. Корпус 20 механически присоединен к обойме 18 посредством механического соединения скользящего типа, направляемого в осевом направлении 6. Другими словами, корпус 20 выполнен с возможностью перемещения вперед в осевом направлении 6 от обоймы 18.
[0044] Наружное кольцо 10 имеет цилиндрическую поверхность 22 скольжения, расположенную радиально внутри кольца 10. Поверхность 22 скольжения проходит по всей внутренней периферии кольца 10.
[0045] Осевой упор 14 имеет переднюю поверхность 24 скольжения и проходит в плоскости, по существу перпендикулярной направлению оси 6. Поверхность 24 скольжения охватывает всю периферию осевого упора 14 и имеет кольцевую форму, проходя вокруг оси 6.
[0046] Осевой упор 16 имеет переднюю поверхность 26 скольжения, проходящую по существу в плоскости, параллельной плоскости поверхности 24 скольжения, то есть, в плоскости, по существу перпендикулярной направлению оси 6. Поверхность 26 охватывает всю периферию осевого упора 16 и имеет кольцевую форму, проходя вокруг оси 6.
[0047] Поверхности 22, 24 и 26 скольжения выполнены из материалов, обеспечивающих соответствующее трение указанных поверхностей с другой поверхностью внутреннего кольца 12. Другим термином, обычно применяемым специалистами по отношению к поверхностям 22, 24 и 26 скольжения, является термин «каток».
[0048] Осевой упор 16 выполнен с возможностью перемещения вперед относительно подвижного корпуса 4 в соответствии с направлением оси 6. В частности, упор 16 выполнен с возможностью осевого перемещения между рабочим положением, которое проиллюстрировано на Фиг. 1, и положением сборки/разборки, сдвинутым в осевом направлении наружу подшипника 8, то есть, вправо на Фиг. 1. Между положением сборки/разборки и рабочим положением упор 16 легко смещается на расстояние, составляющее от одной до трехкратной толщины внутреннего кольца 12.
[0049] Далее, со ссылкой на Фиг. 1 и Фиг. 2 описана конструкция кольцевого корпуса 20 внутреннего кольца 12. На Фиг. 2 схематически представлено внутреннее кольцо 12. Для ясности, на Фиг. 2 показан только цилиндрический корпус 20, а цилиндрическая обойма 18 не показана.
[0050] Корпус 20 состоит из цилиндрической рабочей части 28, проходящей вокруг осевого направления 6. Как изображено на Фиг. 1, рабочая часть 28 обеспечивает скользящий контакт, ориентированный в радиальном направлении относительно оси 6, с поверхностью 22 скольжения. Цилиндрический корпус 20 состоит из первой передней рабочей части 30, образующей плоскость, по существу перпендикулярную осевому направлению 6. Как изображено на Фиг. 1, рабочая часть 30 обеспечивает скользящий контакт, ориентированный в осевом направлении оси 6, с поверхностью 24 скольжения. Подобным образом, корпус 20 имеет вторую переднюю рабочую часть 32, образующую плоскость, по существу перпендикулярную осевому направлению 6. Рабочая часть 32 противоположна рабочей части 30 в осевом направлении относительно кольца 12. Как изображено на Фиг. 1, рабочая часть 32 обеспечивает скользящий контакт, ориентированный в соответствии с осевым направлением оси 6, с поверхностью 26 скольжения.
[0051] Обычно, между рабочими частями 28, 30, 32 и соответствующими им поверхностями 22, 24, 26 скольжения обеспечена подача гидравлической рабочей среды. Гидравлическая рабочая среда может представлять тонкий слой масла, предназначенный для обеспечения возможности передачи усилий между кольцами с помощью образования уменьшенного трения.
[0052] Как изображено на Фиг. 2 и 3, кольцевой корпус 20 разделен на двенадцать по существу одинаковых секторных модулей 34. В показанном примере варианта выполнения все модули 34 проходят между двумя дугами окружности, охватывающими одинаковый центральный угол (не отмечено на чертеже), по существу равный 30°. Однако, другое количество секторных модулей или другой центральный угол не выходит за пределы объема изобретения. Более того, следует отметить, что некоторые секторные модули могут проходить между двумя дугами окружности, соответствующими первому значению центрального угла, а другие секторные модули могут проходить между двумя дугами окружности, соответствующими второму значению центрального угла, отличного от первого.
[0053] Как показано на Фиг. 3, каждый секторный модуль 34 включает опору 36, ограниченную по длине двумя плоскостями, параллельной и перпендикулярной осевому направлению 6, и орторадиальным образом ограниченную двумя секущими плоскостями, образующими между собой угол, примерно равный 30°. Опора 36 выступает выступающей частью 38 радиально внутрь. Выступающая часть 38 имеет два сквозных отверстия 40. Отверстия 40 по существу направлены в осевом направлении 6.
[0054] Каждый модуль 34 имеет радиальный буферный элемент 42, проходящий радиально в наружном направлении от опоры 36. Радиальный буферный элемент 42 выполнен из материала, обеспечивающего уменьшение трения с поверхностью 22 скольжения. Радиальный буферный элемент 42 прикреплен к установочному элементу 44. Установочный элемент 44 может быть присоединен к основанию 36 при помощи двух винтов 46.
[0055] Секторный модуль 34 также включает первый осевой буферный элемент 48. Этот буферный элемент 48 может быть прикреплен к элементу, подобному элементу 44, который может быть присоединен к основанию 36 с помощью средств, аналогичных винтам 46. Также как и буферный элемент 42, буферный элемент 48 выполнен из материала, обеспечивающего уменьшение трения с поверхностью 24 скольжения.
[0056] Модуль 34 также включает второй осевой буферный элемент 50. Буферные элементы 48 и 50 проходят от опоры 36 в осевом направлении 6, каждый, соответственно, в противоположном направлении. Также как и буферный элемент 48, буферный элемент 50 может быть прикреплен к элементу, обеспечивающему его закрепление с возможностью отсоединения на опоре 36. Элемент 50, предпочтительно, выполнен из материала, обеспечивающего уменьшение трения с поверхностью 26 скольжения.
[0057] Как изображено на Фиг. 2, когда двенадцать модулей 34 расположены бок о бок, двенадцать буферных элементов 42 образуют по существу цилиндрическую поверхность в виде цилиндрической рабочей части 28. Подобным образом, двенадцать осевых буферных элементов 48 обеспечивают по существу плоскую и кольцевую поверхность, составляющую переднюю рабочую часть 30. Аналогично, двенадцать осевых буферных элементов 50 обеспечивают по существу плоскую кольцевую поверхность, представляющую переднюю рабочую часть 32.
[0058] Каждое из двух сквозных отверстий 40 выступа 38 каждого модуля 34 предназначено для прохождения штанги 52 (см. Фиг. 5) обоймы 18. Обойма 18 включает 24 штанги 52, которые проходят в одном направлении параллельно осевому направлению 6. В результате обеспечена возможность перемещения каждого модуля 34 вперед относительно обоймы 18 в осевом направлении 6. Другими словами, каждый модуль 34 может перемещаться вперед относительно других модулей 34 и в осевом направлении 6.
[0059] Как изображено на Фиг. 4 и Фиг. 5, осевой упор 16 установлен на втулке 56, выполненной с возможностью перемещения. Втулка 56 расположена вокруг вала 2 и, в частности, выполнена с возможностью перемещения вперед в соответствии с осевым направлением 10 относительно вала 2. Осевой упор 16 может перемещаться между рабочим положением (Фиг. 4), в котором упор упирается и соединен с наружным кольцом 10, и положением сборки/разборки (смотри Фиг. 5), в котором упор сдвинут в осевом направлении наружу относительно уровня 8. Для ограничения осевого смещения втулки 56 относительно вала 2 указанный вал имеет упорный радиальный выступ 58.
[0060] Когда осевой упор 16 расположен в рабочем положении, рабочая цилиндрическая часть 28 находится в контакте с поверхностью 22 скольжения, а передние рабочие части 30, 32 находятся в контакте с поверхностями 24, 26 скольжения, соответственно. Подшипник 8 качения обеспечивает функции радиального и осевого направления внутреннего кольца 12 относительно наружного кольца 10 и оси 6. Крепежные средства 57, в настоящем случае это винты, обеспечивают соединение наружного кольца 10 с осевым упором 16.
[0061] Как изображено на Фиг. 5, когда втулка 56 смещена в осевом направлении в наружном направлении от подшипника 8, осевой упор 16 расположен в соответствии с положением сборки/разборки подшипника. В этом случае, каждый модуль 34 может быть смещен в осевом направлении наружу от наружного кольца 10 в соответствии с положением сборки/разборки модуля 34. В частности, каждый модуль 34 может быть смещен с обеспечением расположения буферного элемента 48 модуля 34 снаружи пространства, образованного в осевом направлении между передними рабочими частями 30 и 32. Для ограничения осевого смещения модуля 34 от обоймы 18 каждая штанга 52 имеет ограничительную деталь 54.
[0062] Таким образом, обеспечена возможность легкого доступа оператора к буферному элементу (элементам) 42, 48 или 50 модуля 34, который был смещен, и выполнения демонтажа указанного элемента (элементов). Для этого оператор отсоединяет средства 57 крепления, затем выполняет осевое перемещение втулки 56 из ее рабочего положения в положение сборки/разборки. После этого оператор может удалить буферные элементы 50, составляющие рабочую часть 32, и заменить их. Далее оператор перемещает один из модулей 34 в осевом направлении из его рабочего положения в положение сборки/разборки. Затем он отсоединяет и заменяет буферный элемент 42 и буферный элемент 48 смещенного модуля 34. После этого оператор возвращает модуль 34 в исходное рабочее положение. Он поворачивает вал 2 на угол 30°, а затем выполняет те же действия с модулем 34, который занял место модуля 34, у которого были заменены буферные элементы. После того, как оператор заменил буферные элементы всех модулей 34 и вернул их обратно в рабочее положение, он перемещает осевой упор 16 из его положения сборки/разборки в рабочее положение, после чего снова присоединяет крепежные средства 57. Данная манипуляция облегчена, если буферные элементы имеют уменьшенные размеры вследствие разделения кольцевого корпуса 20 на сегменты. Таким образом, оператор не ограничен для выполнения манипуляций внутри подвижного корпуса 4.
[0063] Кроме того, выполняя небольшие повороты вала 2 относительно корпуса 4, оператор всегда может гарантировать, что поставил модуль 34, с которым он работает, в одно место, например, расположенное вертикально над осью 6. Далее оператор должен получить доступ к небольшому пространству внутри подвижного корпуса 4 для легкого демонтажа рабочих частей подшипника 8.
[0064] В проиллюстрированном примере варианта выполнения корпус 20 разделен на двенадцать модулей 34. Однако может быть выбрано другое количество секторных модулей без выхода за пределы объема изобретения. В частности, при выборе большего количества модулей уменьшается размер радиальных и осевых буферных элементов, которыми оперируют при замене рабочих частей, тем самым, облегчая работу оператора с одним секторным модулем. Однако, увеличение количества секторных модулей увеличивает количество работы по сборке и разборке радиальных или осевых буферных элементов, удлиняя время, необходимое оператору для замены всех буферных элементов секторных модулей. Количество модулей 34, равное двенадцати, является хорошим компромиссом, обеспечивающим простоту работы с буферными элементами и в то же время исключающим необходимость излишнего увеличения длительности выполнения операций по замене рабочих частей.
[0065] В данном примере варианта выполнения внутреннее кольцо имеет цилиндрическую рабочую часть и две передние рабочие части. Однако объем изобретения не исключает применение подшипника качения, в котором рабочие части расположены иначе.
[0066] Согласно первому альтернативному варианту выполнения (не показан), передняя рабочая часть 32, образованная буферными элементами 48, уже не является частью внутреннего кольца 10, а закреплена на осевом упоре 16. При этом корпус 20 включает поверхность 26 скольжения. Согласно второму варианту (не показан), рабочая часть 30 прикреплена к осевому упору 14, а корпус 20 включает поверхность 24 скольжения. Каждый из указанных вариантов является технически приемлемым и обеспечивает выполнение подшипником 8 его функции, облегчая выполняемую оператором замену по меньшей мере некоторых рабочих частей. Однако первый вариант является более привлекательным, чем второй вариант, так как обеспечена возможность, в качестве первого примера реализации, осевого смещения трех буферных элементов 42, 48 и 50 наружу из пространства между рабочими частями 30 и 32 в осевом направлении.
[0067] В первом примере реализации и его первом и втором вариантах выполнения рабочая цилиндрическая часть 38 является частью внутреннего кольца 12, при этом наружное кольцо 10 имеет поверхность 22 скольжения. В результате облегчен доступ оператора к буферному элементу 42, составляющему рабочую часть 38.
[0068] Согласно третьему варианту выполнения (не показан), цилиндрическая рабочая часть установлена на наружном кольце, при этом внутреннее кольцо включает соответствующую поверхность скольжения. Этот вариант, несмотря на то, что он усложняет выполняемую оператором разборку буферных элементов, образующих цилиндрическую рабочую часть, упрощает общую конструкцию подшипника вала по сравнению с первым примером реализации. В результате может быть обеспечено уменьшение расходов, связанных с проектированием и изготовлением подшипника, а также уменьшение площади опорного основания.
[0069] Более того, изобретение описано применительно к подшипнику 8, сочетающему в себе функции радиальной и осевой ориентации вала 2 относительно корпуса 4. Однако можно создать подшипник, выполненный согласно изобретению и обеспечивающий только функцию радиальной ориентации. Другими словами, изобретение также может быть реализовано с подшипником вала, установленным на ведущем конце вала 2. В данном случае подшипник отличается от подшипника 8 тем, что не имеет осевых упоров 14 и 16 и рабочих частей 30 и 32. Более того, может быть создано (разумеется, без выхода за пределы объема изобретения) кольцо, включающее разделенную на сегменты цилиндрическую рабочую часть, и одну или две передние рабочие части, не разделенные на сегменты.
[0070] На Фиг. 6 показан второй пример варианта выполнения изобретения. Подобными номерами позиций отмечены одинаковые элементы.
[0071] Как и в первом примере, внутреннее кольцо 12 включает обойму 18 и кольцевой корпус 20, разделенный на несколько секторных модулей (не отмечены номерами позиций). В частности, второй пример варианта выполнения отличается от первого примера тем, что каждый секторный модуль также сегментирован в соответствии с радиальным направлением относительно оси 6, во внутренней части 64 и наружной части 66. Наружная часть 66 проходит в радиальном направлении, выступая наружу от внутренней части 64. Часть 64 может перемещаться вперед относительно части 66, в направлении оси 6. Когда секторные модули находятся в рабочих положениях, запирающий механизм 68 препятствует взаимному смещению внутренней части 64 каждого модуля относительно наружной части 66. Например, запирающий механизм 68 может включать стопорное кольцо.
[0072] Кроме того, согласно второму примеру, внутреннее кольцо 12 включает переднюю поверхность 60 скольжения, по существу плоскую и перпендикулярную оси 6, и осевой скользящий контакт с передней рабочей частью 62, установленной на осевом упоре 16. Таким образом, распределение рабочих частей между кольцами 10, 12 и упорами 14, 16 является первой альтернативой первому примеру реализации. Как уже отмечено, данное условие обеспечивает надлежащее выполнение подшипником двойной функции радиального и осевого направления, при этом обеспечена оптимизация пространства для облегчения операции по замене рабочих частей подшипника.
[0073] Посредством подшипника согласно второму примеру варианта выполнения оператор может выполнить описанную ниже процедуру по разборке рабочей части 30.
[0074] На первом этапе оператор удаляет блокирующий механизм 68. Затем оператор перемещает внутреннюю часть 64, смещая ее относительно наружной части 66 в осевом направлении 6, до тех пор, пока рабочая часть 30 не будет смещена в осевом направлении из пространства, ограниченного в осевом направлении упорами 14 и 16. В результате, оператору проще снимать буферные элементы 48, образующие рабочую часть 30.
[0075] После отсоединения и замены буферных элементов 48 оператор перемещает внутреннюю часть 64 в ее исходное положение и ставит на место блокирующий механизм 68.
[0076] В свете двух рассмотренных примеров, которые были подробно описаны со ссылкой на чертежи, изобретение обеспечивает для оператора более простую замену рабочих частей кольца подшипника, применяемого в узле привода морского средства передвижения. В частности, это обеспечивает возможность эксплуатации подшипников вала без необходимости разборки узла привода и, следовательно, без постановки судна в сухие доки.
[0077] Изобретение представляет еще больший интерес, если подшипник вала, рабочие части которого подлежат замене, обеспечивает функцию двойной ориентации в радиальном и осевом направлениях.
[0078] В действительности, понятно, что подшипник, который содержит, в частности, как цилиндрическую рабочую часть, так и две передние рабочие части и в котором цилиндрическая рабочая часть расположена осевым образом между передними рабочими частями, имеет гораздо меньшую площадь основания по сравнению с обычным подшипником, который включает первый подшипник качения, обеспечивающий радиальную ориентацию, и осевой упорный подшипник, обеспечивающий осевую ориентацию.
[0079] Кроме того, используя предложенный подшипник, оператор, работая на одном месте, может снять и заменить буферные элементы, образующие передние и цилиндрические рабочие части. В результате обеспечена возможность увеличения объема данного пространства, что дополнительно облегчает замену рабочих частей подшипника из внутреннего пространства подвижного корпуса узла привода.
Реферат
Изобретение относится к узлам привода морских средств передвижения, таких как суда, подводные лодки или даже нефтяные платформы. В частности, настоящее изобретение относится к узлам привода, устанавливаемым на платформах. Кольцо для подшипника вала узла привода водного средства передвижения, содержащее кольцевой корпус (20), цилиндрическую рабочую часть (28), предназначенную для обеспечения функции скользящего контакта с другим кольцом подшипника вала. Цилиндрическая рабочая часть (28) разделена на сегменты цилиндрической поверхности. Кольцевой корпус (20) сегментирован на несколько модулей (34) в форме сектора кольцевого корпуса (20), выполненных с возможностью выдвижения. Каждый модуль (34) содержит сегмент цилиндрической поверхности, образующий часть указанной цилиндрической рабочей части (28). Каждый из сегментов цилиндрической поверхности прикреплен к кольцевому корпусу (20) с возможностью отсоединения. Технический результат: обеспечение более легкого монтажа или демонтажа рабочих частей подшипника вала, включая случаи, когда такой подшипник сочетает функции радиальной и осевой ориентации. 3 н. и 11 з.п. ф-лы, 6 ил.
Комментарии