Устройство изменения радиуса кривошипа кривошипно-шатунного механизма - RU2651897C1
Код документа: RU2651897C1
Чертежи
Описание
Изобретение относится к области машиностроения и может применяться в конструкции тепловых машин, насосов и компрессоров для преобразования поступательного движения во вращательное и, наоборот, вращательного движения в поступательное.
Известен кривошипно-шатунный механизм, который содержит шатун, связанный шарнирно с кривошипом посредством шатунной шейки. При этом кривошип представлен в виде коленчатого вала. [Патент № RU 2256112, МПК: F16H 21/16, дата приоритета: 01.04.2003 г. дата публикации: 10.07.2005 г.].
Известен кривошипно-шатунный механизм, описанный в силовой установке, содержащей электромотор и двигатель внутреннего сгорания, соединенные кривошипно-шатунным механизмом, при этом кривошипно-шатунный механизм содержит цилиндр, поршень, шатун и кривошип, выполненный в виде зубчатого колеса, соединяющий коренную и шатунную шейки, при этом к шатунной шейке присоединен шатун, а к коренной шейке присоединен шкив. [Патент № FR 2984957 B1, МПК: B60W 20/00, F02B 75/32, F02D 15/02, дата приоритета: 22.12.11 г., дата публикации: 28.06.2013 г.].
В качестве прототипа выбрано устройство изменения радиуса кривошипа кривошипно-шатунного механизма, содержащее кривошип, состоящий из соединенных между собой гидравлическим приводным механизмом коренной и шатунной шеек [US 2319485, дата приоритета: 18.05.1943 г., дата публикации: 26.08.1941 г., МПК: F16C 3/28, F16C 3/04].
Недостатком прототипа является невозможность совершения полной остановки кривошипно-шатунного механизма из-за того, что кронштейн, в котором закреплена шатунная шейка кривошипно-шатунного механизма в своем крайнем положении упирается в диск, в котором смонтирован гидравлический приводной механизм, и не имеет возможности соосного совмещения с коренной шейкой, вследствие чего в значительной степени ограничивается функционал и область применения кривошипно-шатунного механизма.
Техническая задача заявляемого изобретения заключается в расширении функционала и области применения кривошипно-шатунного механизма.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является обеспечение возможности расширения диапазона изменения угловой скорости вращения коренной шейки без остановки кривошипно-шатунного механизма.
Сущность заявляемого изобретения заключается в следующем.
Устройство изменения радиуса кривошипа кривошипно-шатунного механизма содержит кривошип, состоящий из соединенных между собой дистанционно управляемым поршневым механизмом коренной и шатунной шеек. В отличие от прототипа коренная и шатунная шейки соединены дистанционно управляемым поршневым приводным механизмом с возможностью их соосного совмещения.
Коренная шейка представляет из себя цилиндр, ось вращения которого является осью вращения кривошипно-шатунного механизма. С одной стороны коренная шейка может быть соединена с цапфой или маховиком, предназначенными для передачи крутящего момента.
Шатунная шейка представляет собой цилиндр, ось вращения которого параллельна оси вращения коренной шейки. К шатунной шейке соосно присоединен элемент, сообщающий поступательное движение, например шатун или кулиса.
Коренная и шатунная шейки могут быть изготовлены из металла различными способами, например отлиты из чугуна или выкованы из высоколегированной стали. Боковая поверхность коренной и шатунной шеек обрабатывается с высокой точностью и образует с сопрягаемыми поверхностями подшипник скольжения. Подшипник скольжения обеспечивает вращательное движение при высоких оборотах и нагрузках. Дополнительно между боковой поверхностью коренной или шатунной шейки и сопрягаемой с ней поверхностью может быть расположен вкладыш, изготовленный из тонкостенного металла, снижающий силы трения, возникающие между боковой и сопрягаемой с ней поверхностью. При эксплуатации кривошипно-шатунного механизма на невысоких оборотах и малых нагрузках между боковой поверхностью коренной или шатунной шейки и сопрягаемой с ней поверхностью устанавливается обойма, снабженная сферическими или цилиндрическими телами качения, образуя таким образом подшипник качения.
Кривошип является вращательным звеном кривошипно-шатунного механизма. Кривошип представляет собой соединенные между собой коренную и шатунную шейки. Кривошип предназначен для преобразования поступательного движения, сообщенного шатунной шейке, во вращательное движение коренной шейки (или наоборот, вращательного движения, сообщенного коренной шейке, в поступательное движение шатуна, присоединенного к шатунной шейке). Расстояние между коренной и шатунной шейками является радиусом кривошипа. Крутящий момент и угловая скорость коренной шейки находятся в прямой зависимости от величины радиуса кривошипа. Кривошип изготовлен из материала, обладающего высокими прочностными свойствами, например из металла или композитных материалов.
Кривошипно-шатунный механизм снабжен дистанционно управляемым поршневым приводным механизмом, соединяющим коренную и шатунную шейки. Дистанционно управляемый поршневой приводной механизм состоит из поршневого приводного механизма и средств для соединения поршневого приводного механизма с системой управления.
Приводной поршневой механизм обеспечивает возможность изменения радиуса кривошипа кривошипно-шатунного механизма. По типу исполнительных узлов поршневой приводной механизм может быть гидравлическим или пневматическим.
Гидравлический и пневматический приводные поршневые механизмы содержат исполнительный узел, представленный в виде цилиндра с погруженным внутрь него поршнем, при этом к поршню присоединен ползун. Возвратно-поступательное движение ползуна обеспечивается посредством рабочей жидкости или газа, воздействующих на поршень.
Система управления поршневым приводным механизмом предназначена для активации исполнительных узлов поршневого приводного механизма и может быть установлена обособленно от него. Система управления поршневым приводным механизмом может включать гидравлические насосы, воздушные компрессоры, блоки клапанов и электронные блоки управления, датчики положения и позиционеры, интерфейс, который может быть представлен в виде гидравлического, пневматического или электронного пульта управления.
Средства для соединения поршневого приводного механизма с системой управления установлены таким образом, чтобы обеспечить соединение между системой управления и исполнительными узлами поршневого приводного механизма. При этом указанные средства должны выбираться согласно конфигурации исполнительных узлов поршневого приводного механизма. Средства для соединения поршневого приводного механизма с системой управления могут быть представлены в виде каналов, выполненных внутри конструктивных элементов кривошипно-шатунного механизма. Внутри каналов движется рабочая жидкость или сжатый газ. Также средства для соединения поршневого приводного механизма с системой управления могут быть представлены в виде гидравлических шлангов высокого давления или пневматических трубок, проложенных снаружи конструктивных элементов кривошипно-шатунного механизма.
Средства для соединения поршневого приводного механизма с системой управления могут содержать разрывы в местах сопряжения подвижных и неподвижных конструктивных элементов кривошипно-шатунного механизма. Для обеспечения связи между системой управления и исполнительными узлами поршневого приводного механизма в разрывы устанавливают связующие приспособления. В случае применения гидравлического или пневматического приводного механизма связующим приспособлением может быть фланец с каналами.
Приводной поршневой механизм может быть присоединен к коренной шейке, при этом ползун, подвижно закрепленный в приводном механизме, должен быть присоединен к шатунной шейке. Также приводной поршневой механизм может быть присоединен к шатунной шейке, в таком случае ползун должен быть присоединен к коренной шейке.
Коренная и шатунная шейки соединены дистанционно управляемым поршневым приводным механизмом с возможностью их соосного совмещения, что обеспечивает возможность остановки кривошипно-шатунного механизма. Для этого приводной механизм может быть присоединен к коренной шейке посредством фланца, махового колеса или кронштейна. Также приводной поршневой механизм может быть присоединен непосредственно к коренной или шатунной шейке со смещением.
Приводной поршневой механизм может быть присоединен к коренной или шатунной шейке разъемным или неразъемным способами.
Заявляемое изобретение обладает новыми ранее неизвестными из уровня техники отличительными признаками, заключающимися в том, что коренная и шатунная шейки соединены дистанционно управляемым поршневым приводным механизмом с возможностью их соосного совмещения, что обеспечивает возможность изменения радиуса кривошипа кривошипно-шатунного механизма дистанционно в процессе эксплуатации механизма и, следовательно, позволяет бесступенчато изменять величину крутящего момента, приложенного к коренной шейке, благодаря чему достигается технический результат, заключающийся в обеспечении возможности расширения диапазона изменения угловой скорости вращения коренной шейки без остановки кривошипно-шатунного механизма, что, в свою очередь, расширяет функционал и область применения кривошипно-шатунного механизма.
Наличие новых отличительных существенных признаков свидетельствует о соответствии заявляемого изобретения критерию патентоспособности «новизна».
Использование устройств изменения радиуса кривошипа кривошипно-шатунного механизма, в которых кривошип состоит из соединенных между собой дистанционно-управляемым приводными механизмом коренной и шатунной шеек, известно из уровня техники. При этом из уровня техники также известно применение механического приводного механизма, обеспечивающего возможность соосного совмещения коренной и шатунной шеек, для остановки кривошипно-шатунного механизма. Однако применение поршневого приводного механизма, обеспечивающего возможность изменения радиуса кривошипа кривошипно-шатунного механизма и его остановки, из уровня техники ранее не известно. Это может быть обусловлено тем, что промышленные потребности в таких устройствах полностью удовлетворялись применением механического приводного механизма, а развитие поршневых приводных механизмов в этом направлении в связи с этим не проводилось. Однако именно поршневые приводные механизмы в большинстве своем обладают высоким быстродействием, что позволяет останавливать кривошипно-шатунный механизм с более высокой скоростью. Также они обладают более высокой надежностью и меньшей массой за счет применения в них меньшего количества узлов и деталей, что также существенно влияет на скорость остановки кривошипно-шатунного механизма. При этом в качестве поршневого приводного механизма может быть представлен как гидравлический, так и пневматический приводной механизм, а возможности соединения коренной и шатунной шеек такими приводными механизмами для их совмещения имеют много вариаций, которые могут существенно расширить диапазон скоростей изменения угловой скорости вращения коренной шейки и увеличить динамику остановки кривошипно-шатунного механизма. При этом вариации присоединения приводного поршневого механизма к коренной или шатунной шейкам положительно влияют на компактность и другие конструктивные особенности кривошипно-шатунного механизма, создающие инерционные силы, увеличивающие время остановки кривошипно-шатунного механизма. Таким образом, соединение коренной и шатунной шеек дистанционно управляемым поршневым приводным механизмом, обеспечивающим возможность их соосного совмещения, позволяет достичь синергетического эффекта, заключающегося в увеличении динамики остановки кривошипно-шатунного механизма, что позволяет сделать вывод о соответствии заявляемого изобретения критерию патентоспособности «изобретательский уровень».
Заявляемое изобретение может быть выполнено из известных материалов с помощью известных средств, что свидетельствует о соответствии заявляемого изобретения критерию патентоспособности «промышленная применимость».
Заявляемое изобретение поясняется следующими чертежами.
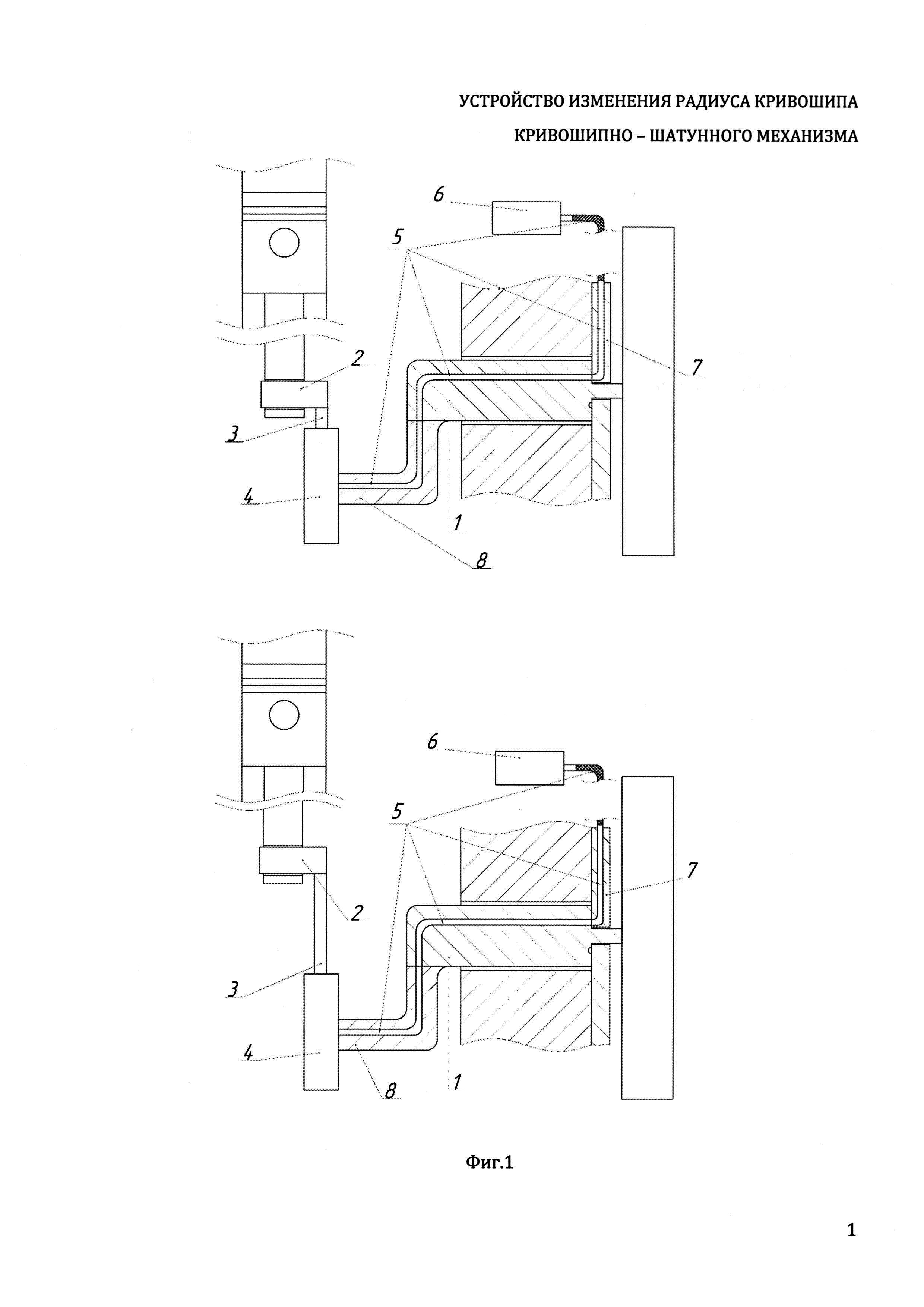
Фиг. 1 - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым поршневым приводным механизмом.
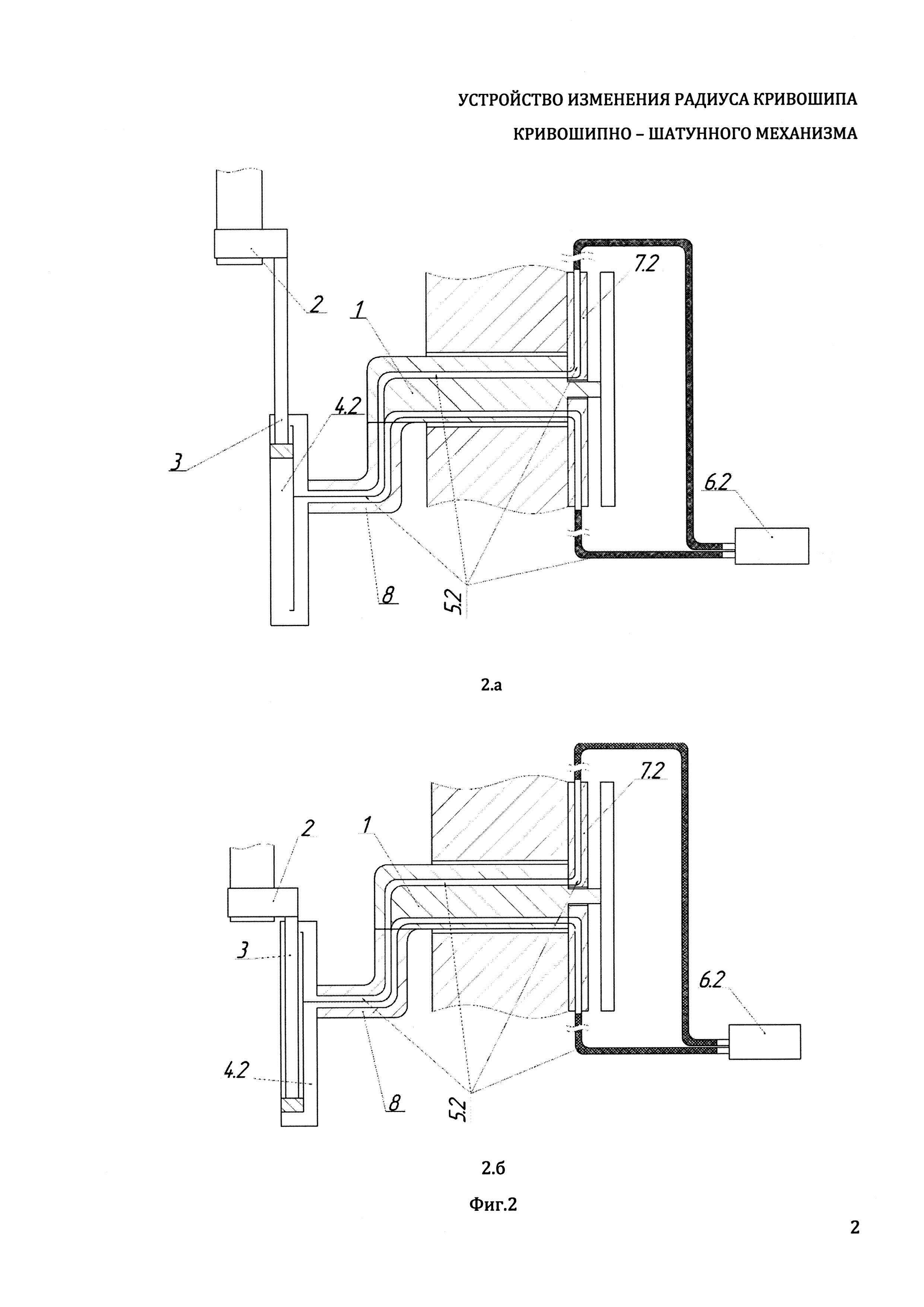
Фиг. 2 (2.а) - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым гидравлическим приводным механизмом, присоединенным к коренной шейке, настроенное на максимальный крутящий момент и угловую скорость вращения коренной шейки.
Фиг. 2 (2.б) - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым гидравлическим приводным механизмом, присоединенным к коренной шейке, настроенное на минимальный крутящий момент и угловую скорость вращения коренной шейки.
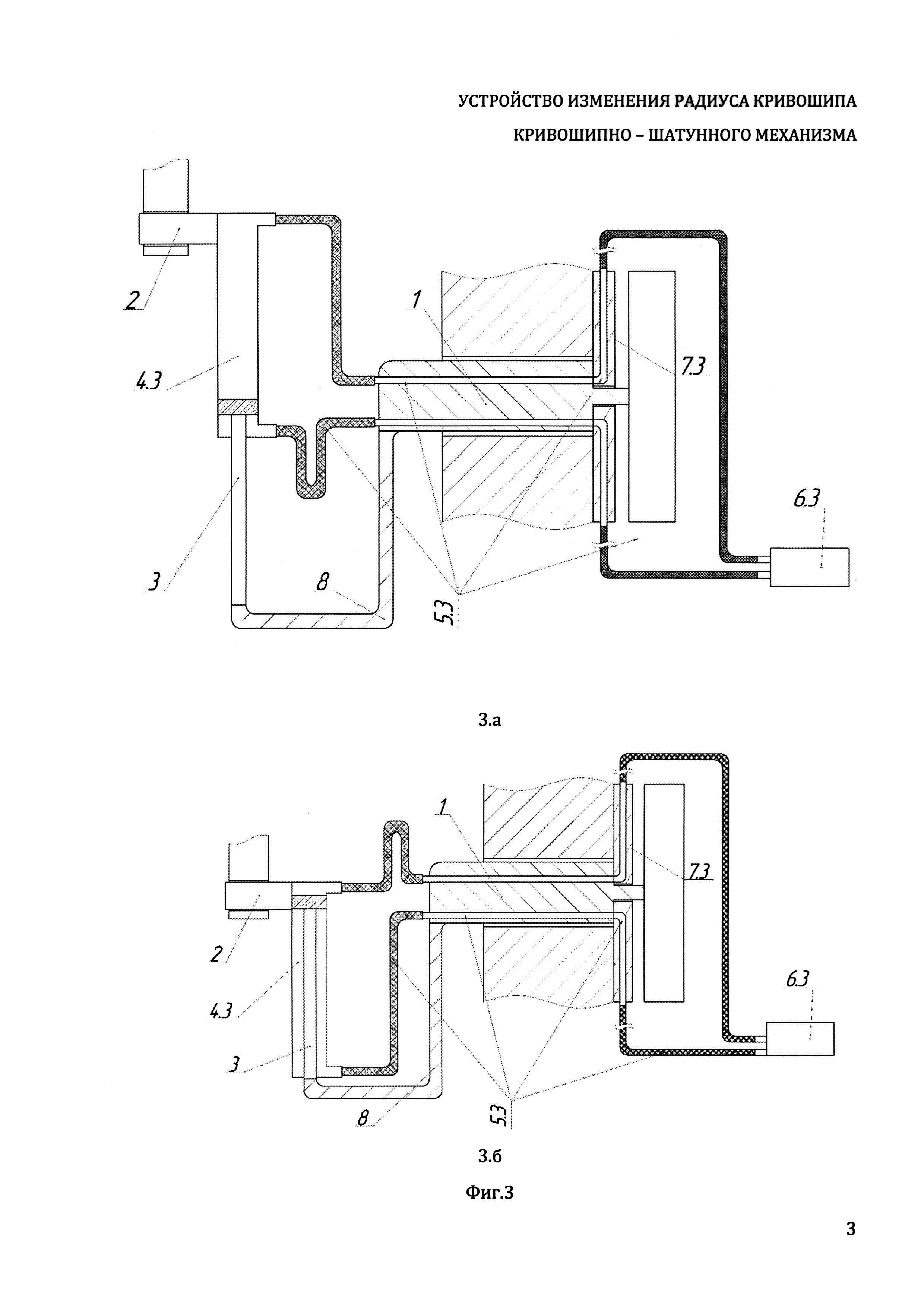
Фиг. 3 (3.а) - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым гидравлическим приводным механизмом, присоединенным к шатунной шейке, настроенное на максимальный крутящий момент и угловую скорость вращения коренной шейки.
Фиг. 3 (3.б) - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым гидравлическим приводным механизмом, присоединенным к шатунной шейке, настроенное на минимальный крутящий момент и угловую скорость вращения коренной шейки.
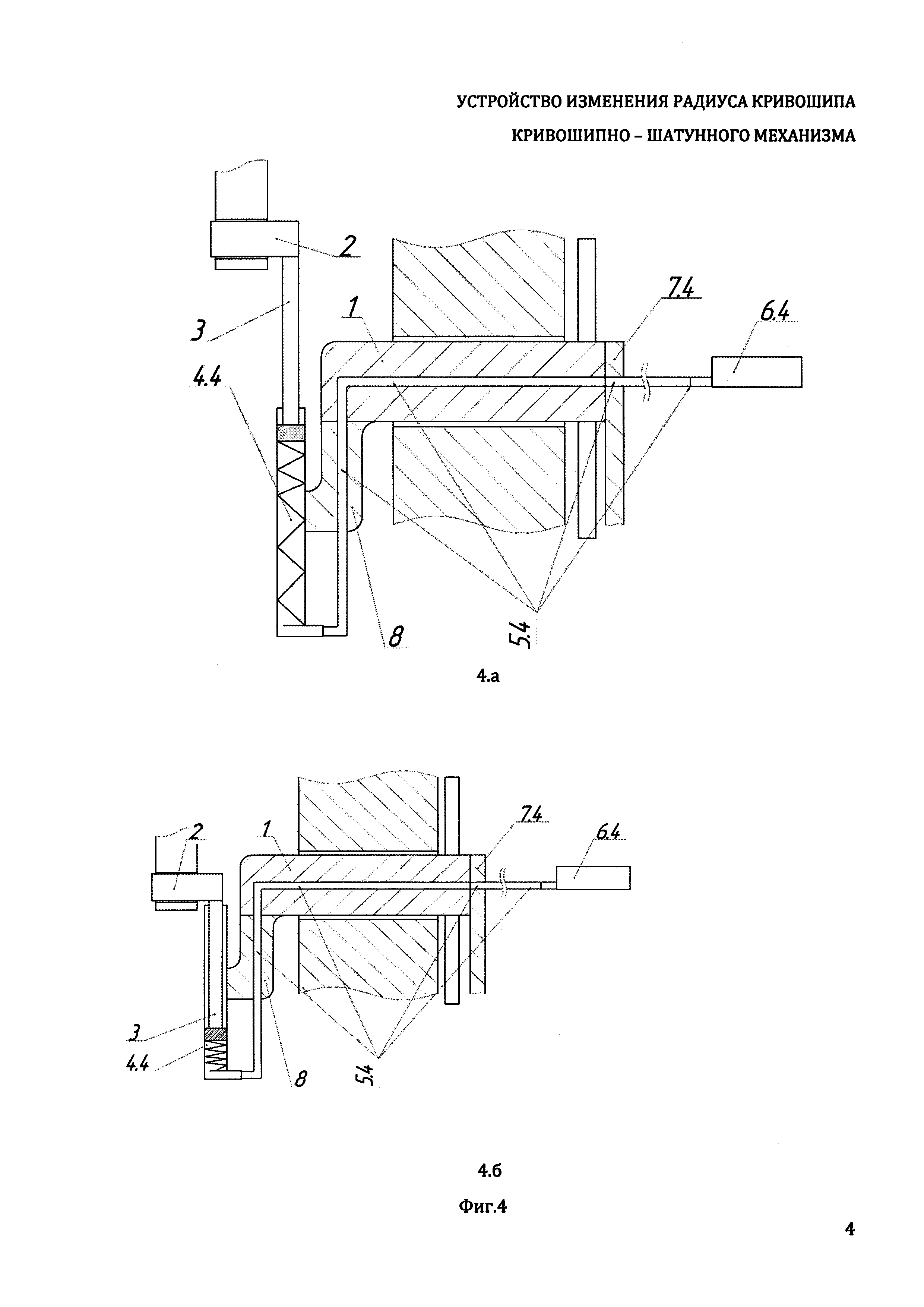
Фиг. 4 (4.а) - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым пневматическим приводным механизмом, присоединенным к коренной шейке, настроенное на максимальный крутящий момент и угловую скорость вращения коренной шейки.
Фиг. 4 (4.б) - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым пневматическим приводным механизмом, присоединенным к коренной шейке, настроенное на минимальный крутящий момент и угловую скорость вращения коренной шейки.
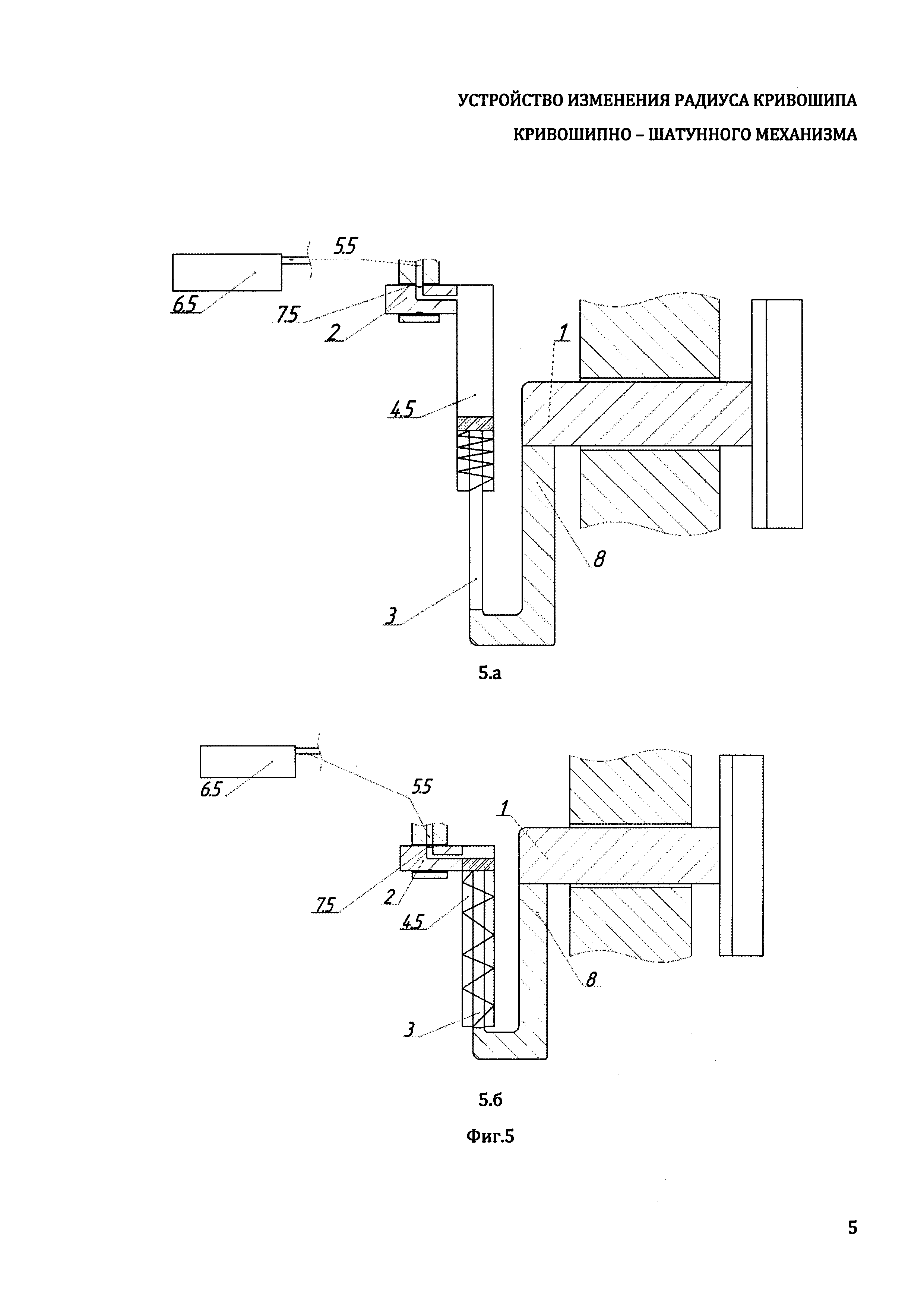
Фиг. 5 (5.а) - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым пневматическим приводным механизмом, присоединенным к шатунной шейке, настроенное на максимальный крутящий момент и угловую скорость вращения коренной шейки.
Фиг. 5 (5.б) - Устройство изменения радиуса кривошипа кривошипно-шатунного механизма с дистанционно управляемым пневматическим приводным механизмом, присоединенным к шатунной шейке, настроенное на минимальный крутящий момент и угловую скорость вращения коренной шейки.
Заявляемое изобретение работает следующим образом.
Устройство изменения радиуса кривошипа кривошипно-шатунного механизма (Фиг. 1) состоит из коренной шейки 1, шатунной шейки 2, ползуна 3, установленного в дистанционно управляемый поршневой приводной механизм, который состоит из приводного механизма 4, соединенного средствами 5 связи с системой 6 управления. При этом ползун 3, установленный в дистанционно управляемый поршневой приводной механизм 4, соединяет коренную шейку 1 и шатунную шейку 2, в разрывы средств 6 связи установлено неподвижное связующее приспособление 7, а к коренной шейке 1 присоединен кронштейн 8.
Система 6 управления посылает команду посредством средств 5 связи на поршневой приводной механизм 4, который вращается вместе с коренной шейкой 1, шатунной шейкой 2 и закрепленным в приводном механизме 4 ползуном 3. В разрыв средств 5 связи, необходимый для обеспечения подвижности конструктивных элементов кривошипно-шатунного механизма, установлено связующее приспособление 7, обеспечивающее передачу команды от системы 6 управления поршневому приводному механизму 4. Команда, переданная системой 5 управления, активирует поршневой приводной механизм 4 и приводит в действие закрепленный в нем ползун 3, изменяя радиус кривошипа и обеспечивая изменение угловой скорости вращения коренной шейки без остановки кривошипно-шатунного механизма, расширяя функционал и область применения кривошипно-шатунного механизма.
Устройство изменения радиуса кривошипа кривошипно-шатунного механизма Фиг. 2 (2.а, 2.б) с дистанционно управляемым гидравлическим приводным механизмом, присоединенным к вращающейся коренной шейке 1 через кронштейн 8. При этом шатунная шейка 2, которой сообщается поступательное движение, присоединена к ползуну 3. Ползун 3 присоединен к гидравлическому приводному механизму 4.2, представленному поршнем, установленным в гидроцилиндр и приводимым в действие рабочей жидкостью, циркулирующей по средству связи 5.2, представленному гидравлической магистралью. Гидравлическая магистраль выполнена внутри коренной шейки 1, кронштейна 8 и неподвижного связующего приспособления 7.2, которое представлено фланцем.
(2.а) Гидравлический приводной механизм 4.2 активируется гидравлической системой 6.2 управления, которая направляет поток рабочей жидкости по гидравлической магистрали, выполненной в неподвижном фланце, в гидравлическую магистраль, выполненную во вращающейся коренной шейке 1 и кронштейне 8. Рабочая жидкость по гидравлической магистрали попадает в гидравлический приводной механизм 4.2 и воздействует на нижнюю поверхность поршня, толкая его вверх. Таким образом, ползун 3 выдвигается и шатунная шейка 2, присоединенная к нему, отдаляется от оси вращения коренной шейки 1.
(2.б) При воздействии рабочей жидкости на верхнюю поверхность поршня он движется вниз. Таким образом, ползун 3 задвигается и шатунная шейка 2, присоединенная к нему, достигает соосного положения с коренной шейкой 1.
Устройство изменения радиуса кривошипа кривошипно-шатунного механизма Фиг. 3 (3.а, 3.б) с дистанционно управляемым гидравлическим приводным механизмом, присоединенным к шатунной шейке 2, которой сообщается поступательное движение. Ползун 3 присоединен к гидравлическому приводному механизму 4.3 и к вращающейся коренной шейке 1 посредством кронштейна 8. Гидравлический приводной механизм 4.3 представлен поршнем, установленным в гидроцилиндр. Гидроцилиндр приводится в действие рабочей жидкостью, циркулирующей по средству связи 5.3, представленному гидравлической магистралью и шлангами высокого давления. Гидравлическая магистраль выполнена внутри коренной шейки 1 и неподвижного фланца. Шланги высокого давления проложены снаружи механизма и соединяют гидравлический приводной механизм 4.3 с гидравлической магистралью, выполненной в коренной шейке 1.
(3.а) Гидравлический приводной механизм 4.3 активируется гидравлической системой 6.3 управления, которая направляет поток рабочей жидкости по гидравлической магистрали, выполненной в неподвижном фланце, в гидравлическую магистраль, выполненную во вращающейся коренной шейке 1. По шлангу высокого давления рабочая жидкость попадает в гидравлический приводной механизм 4.3 и воздействует на внутреннюю поверхность цилиндра над поршнем, толкая гидроцилиндр вверх. Таким образом, гидроцилиндр и присоединенная к нему шатунная шейка 1 достигают максимального отдаления от оси вращения коренной шейки 1.
(3.б) При воздействии рабочей жидкости на внутреннюю поверхность гидроцилиндра снизу поршня гидроцилиндр движется вниз. Таким образом, ползун 3 задвигается и шатунная шейка 2, присоединенная к нему, отдаляется от коренной шейки 1.
Устройство изменения радиуса кривошипа кривошипно-шатунного механизма Фиг. 4 (4.а, 4.б) с дистанционно управляемым пневматическим приводным механизмом, присоединенным к вращающейся коренной шейке 1 через кронштейн 8. При этом шатунная шейка 2, которой сообщается поступательное движение, присоединена к ползуну 3. Ползун 3 присоединен к пневматическому приводному механизму 4.4, представленному поршнем, установленным в пневмоцилиндр и приводимым в действие сжатым газом. Дополнительно поршень пневматического приводного механизма 4.4 снабжен возвратной пружиной. Средство 5.4 связи представлено пневматической линией, находящейся внутри кронштейна 8, коренной шейки 1 и неподвижного связующего приспособления 7.4, представленного фланцем. Снаружи кривошипно-шатунного механизма средство связи 5.4 представлено пневматической трубкой.
(4.а) Пневматический приводной механизм 4.4 активируется пневматической системой 6.4 управления, которая направляет рабочий газ по пневматической линии, выполненной в неподвижном фланце, в пневматическую линию, выполненную во вращающейся коренной шейке 1 и кронштейне 8. Из пневматической линии кронштейна 8, по пневматической трубке, сжатый газ попадает в пневматический приводной механизм 4.4 и воздействует на нижнюю поверхность поршня, толкая его вверх, растягивая при этом возвратную пружину. Таким образом, ползун 3 выдвигается и шатунная шейка 2, присоединенная к нему, отдаляется от оси вращения коренной шейки 1.
(4.б) При сбросе сжатого газа в атмосферу растянутая возвратная пружина стремится вернуться в исходное положение и тянет поршень с ползуном 3. Таким образом ползун 3 задвигается и шатунная шейка 2, присоединенная к нему, достигает соосного положения с коренной шейкой 1.
Устройство изменения радиуса кривошипа кривошипно-шатунного механизма Фиг. 5 (5.а, 5.б) с дистанционно управляемым пневматическим механизмом 4.5, присоединенным к шатунной шейке 2. Ползун 3 закреплен в пневматическом приводном механизме 4.5 и присоединен к коренной шейке 1 посредством кронштейна 8. Пневматический приводной механизм 5.4 представлен поршнем, который снабжен возвратной пружиной и установлен в пневмоцилиндр. Средство связи 5.5 представлено пневматической линией. Пневматическая линия выполнена внутри элемента, сообщающего поступательное движение, шатунной шейки 2 и связующего приспособления 7.5, которое представлено уплотнением с канавкой.
(5.а) Пневматический приводной механизм 4.5 активируется пневматической системой 6.5 управления, которая направляет сжатый газ по пневматической линии, выполненной в элементе, сообщающем поступательное движение шатунной шейке 2, в пневматическую линию, выполненную в шатунной шейке 2 через связующее приспособление 7.5. Сжатый газ попадает из пневматической линии в пневматический приводной механизм 4.5 и воздействует на внутреннюю поверхность пневмоцилиндра, толкая его вверх, сжимая при этом возвратную пружину. Таким образом, шатунная шейка 2, присоединенная к пневматическому приводному механизму, отдаляется от оси вращения коренной шейки 1.
(5.б) При сбросе сжатого газа в атмосферу, сжатая возвратная пружина стремится вернуться в исходное положение и толкает пневмоцилиндр вниз. Таким образом, пневмоцилиндр движется вниз, а шатунная шейка 2, присоединенная к нему, достигает соосного положения с коренной шейкой 1.
Таким образом, заявляемым изобретением обеспечивается достижение технического результата, заключающегося в обеспечении возможности расширения диапазона изменения угловой скорости вращения коренной шейки без остановки кривошипно-шатунного механизма и тем самым расширяется функционал и область применения кривошипно-шатунного механизма.
Реферат
Изобретение относится к области машиностроения, а более конкретно к кривошипно-шатунным механизмам. Устройство изменения радиуса кривошипа кривошипно-шатунного механизма содержит кривошип, состоящий из соединенных коренной и шатунной шеек. Шейки соединены между собой дистанционно управляемым поршневым приводным механизмом с возможностью их соосного совмещения. Достигается расширение диапазона изменения угловой скорости вращения коренной шейки. 7 з.п. ф-лы, 10 ил.
Комментарии