Хирургическое сшивающее и режущее устройство - RU2632513C2
Код документа: RU2632513C2
Чертежи













Описание
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка является частично продолжающей заявкой, которая испрашивает преимущества заявки на Патент США 11/277,323, которая называется: «Способы и устройства для управления движением», поданной 23 марта 2006 года.
ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение прямо относится к способам и устройствам для управления движением рабочим концом хирургического инструмента.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Эндоскопические хирургические инструменты часто предпочитают инструментам для открытых хирургических операций, поскольку использование естественного отверстия сокращает время послеоперационного восстановления и снижает риск послеоперационных осложнений. Следовательно, эндоскопические хирургические инструменты существенно развиваются, поскольку они подходят для точного расположения рабочего конца инструмента в необходимом месте хирургического вмешательства через естественное отверстие. Эти инструменты могут использоваться для захвата и/или лечения тканей множеством способов для достижения диагностического или терапевтического эффекта.
Эндоскопическая хирургия требует, чтобы ствол инструмента был гибким, но при этом позволял все же управлять рабочим концом так, чтобы рабочий конец можно было направлять под углом по отношению к тканям, а в некоторых случаях инициировать резание/сшивание или иные движения рабочего конца. Встраивание элементов управления для манипулирования и приведения в действие рабочего конца эндоскопического инструмента затрудняется использованием гибкого ствола и ограничениями размеров эндоскопических инструментов. Как правило, все управляющие движения передаются через ствол в виде продольного перемещения, чему может препятствовать гибкость ствола. Также существует желание снизить усилие, которое необходимо приложить для управления и/или активации рабочего конца, до уровня, который может устроить всех или большинство хирургов. Одним известным решением снижения усилия для резания/сшивания является применение электродвигателей. Впрочем, хирурги предпочитают получать обратную связь от рабочего конца, чтобы быть уверенными в правильной ориентации концевого исполнительного устройства. Пользовательская обратная связь недостаточно хорошо распознаваема в существующих устройствах с электроприводом.
Таким образом, существует потребность в улучшенных способах и устройствах для управления движениями рабочего конца эндоскопического хирургического инструмента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Принцип настоящего изобретения станет более понятным на примере следующего подробного описания в сочетании с сопроводительными иллюстрациями.
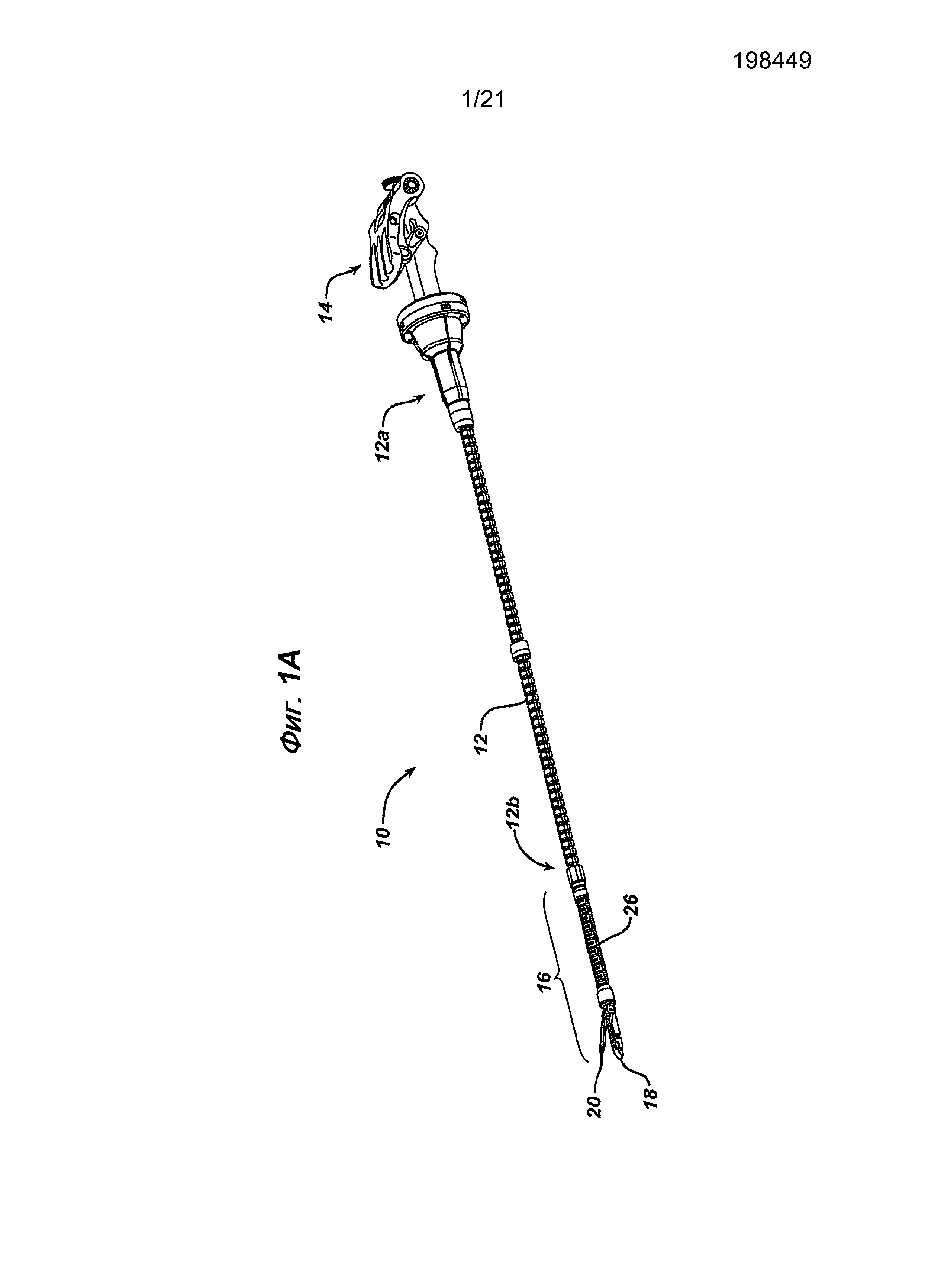
На Фиг. 1A представлен перспективный вид одного из вариантов осуществления хирургического сшивающего и режущего устройства, где рабочий конец устройства изображен в исходном положении;
На Фиг. 1B представлен перспективный вид хирургического сшивающего и режущего устройства из Фиг. 1А, где рабочий конец устройства находится в перемещенном положении;
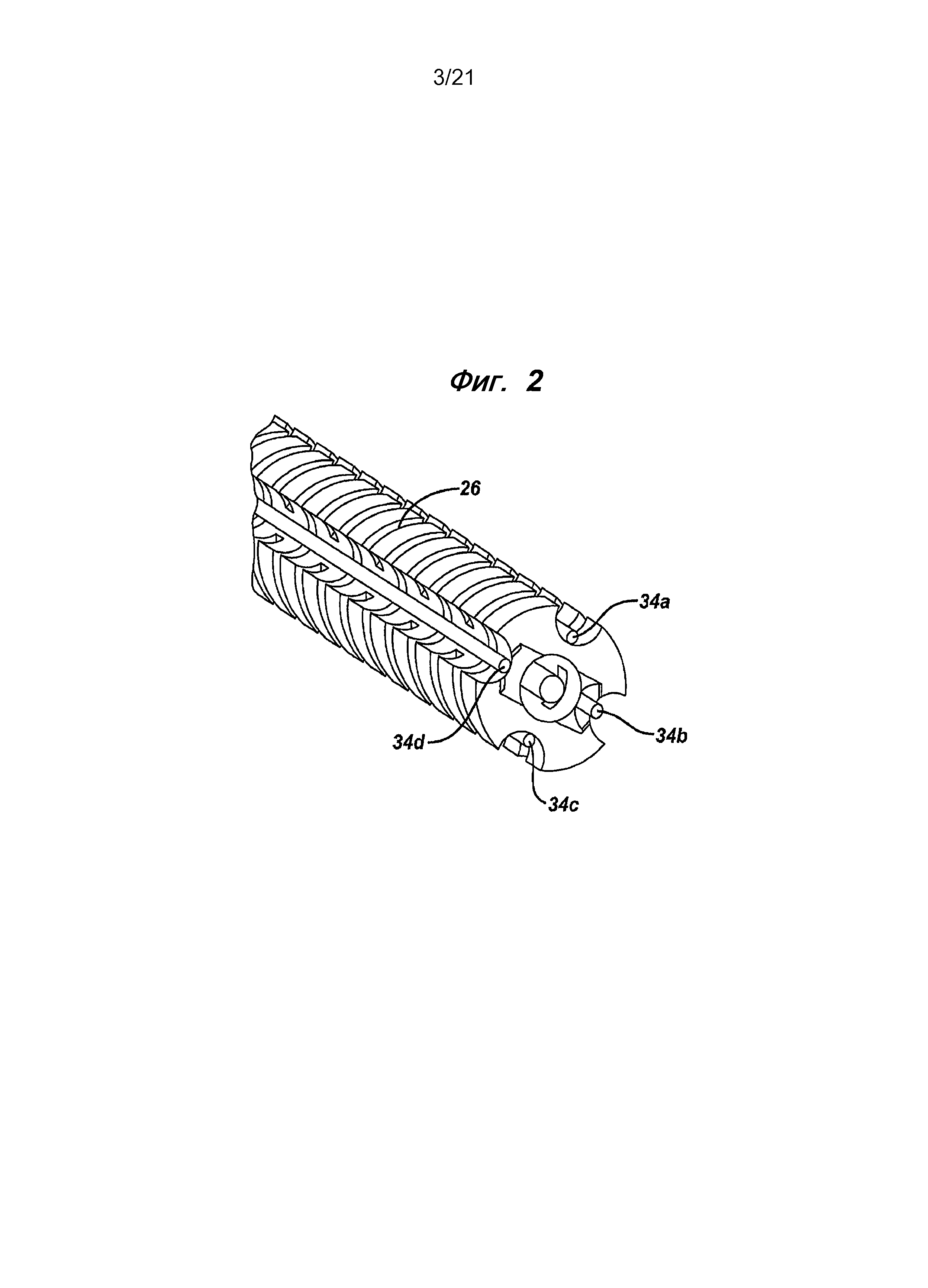
На Фиг. 2 представлен перспективный вид участка гибкой шейки устройства, показанного на Фиг. 1В;
На Фиг. 3A представлен перспективный вид дистального участка устройства, показанного на Фиг. 1А и 1В, где изображено концевое исполнительное устройство, соединенное с гибкой шейкой из Фиг. 2;
На Фиг. 3B представлено поперечное сечение концевого исполнительного устройства, показанного на Фиг. 3А, вдоль оси 3B-3B;
На Фиг. 4A представлен перспективный вид проксимального участка устройства, показанного на Фиг. 1А и 1В, где изображена рукоятка, подвижно прикрепленная к проксимальному концу вала устройства;
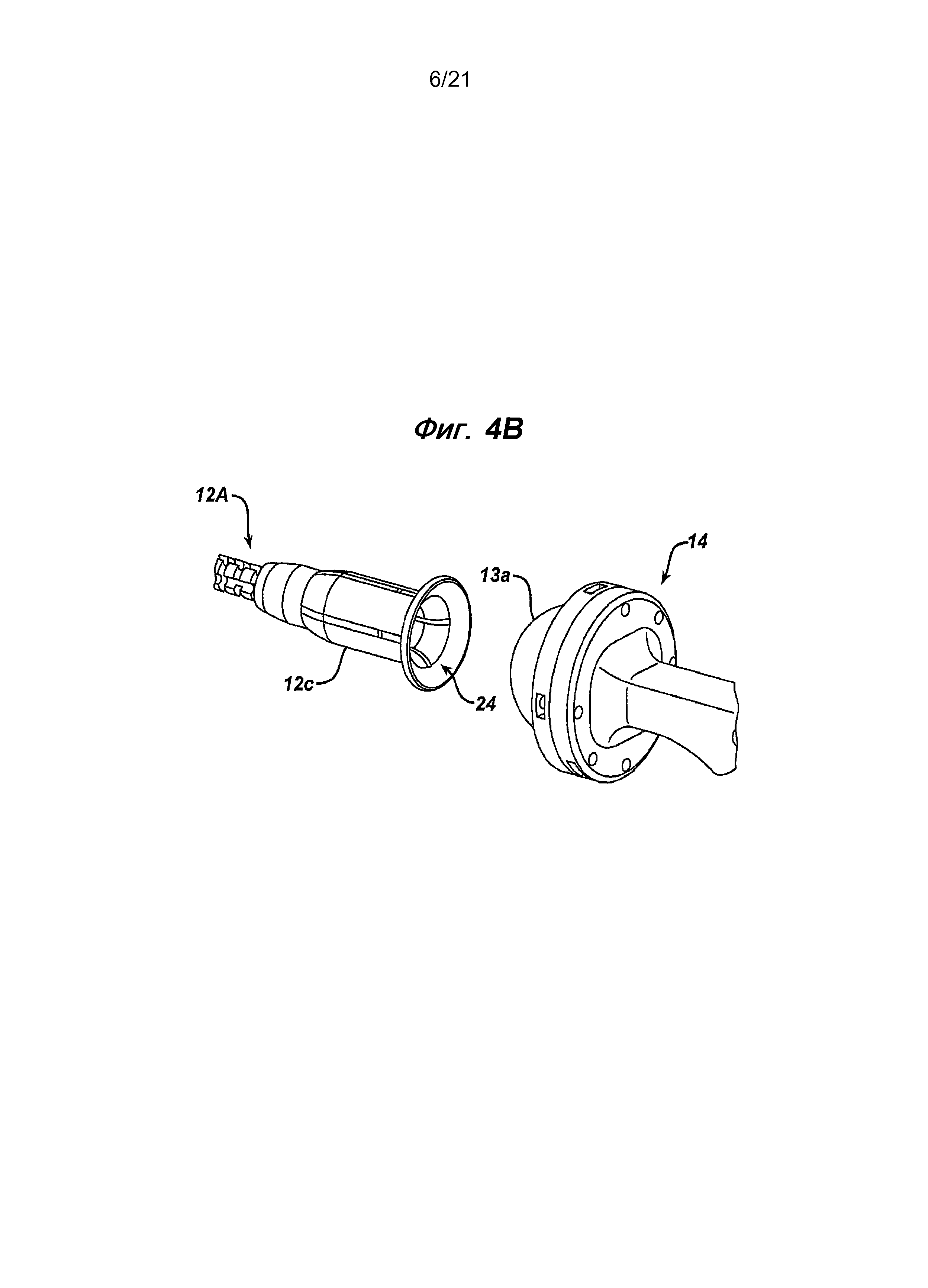
На Фиг. 4B представлено покомпонентное изображение деталей проксимального участка устройства, показанного на Фиг. 4А;
На Фиг. 5 представлена соединительная деталь, установленная между гибкой шейкой и удлиненным стволом прибора, показанного на Фиг. 1А и 1В, где показан оптический вид сборки устройства;
На Фиг. 6 представлен перспективный вид рукоятки устройства, показанного на Фиг. 1А и 1В, показывающий экран вывода изображения;
На Фиг. 7 представлен перспективный вид вспомогательного желоба для использования с эндоскопом;
На Фиг. 8A представлен перспективный вид гибкой шейки устройства, показанного на Фиг. 7;
На Фиг. 8B представлен перспективный вид гибкой шейки, показанной на Фиг. 8А, изображающий шейку, повернутую в первом направлении;
На Фиг. 8C представлен перспективный вид гибкой шейки, показанной на Фиг. 8А, изображающий шейку, повернутую во втором направлении;
На Фиг. 9A представлен перспективный вид другого варианта осуществления гибкой шейки для использования с вспомогательным желобом;
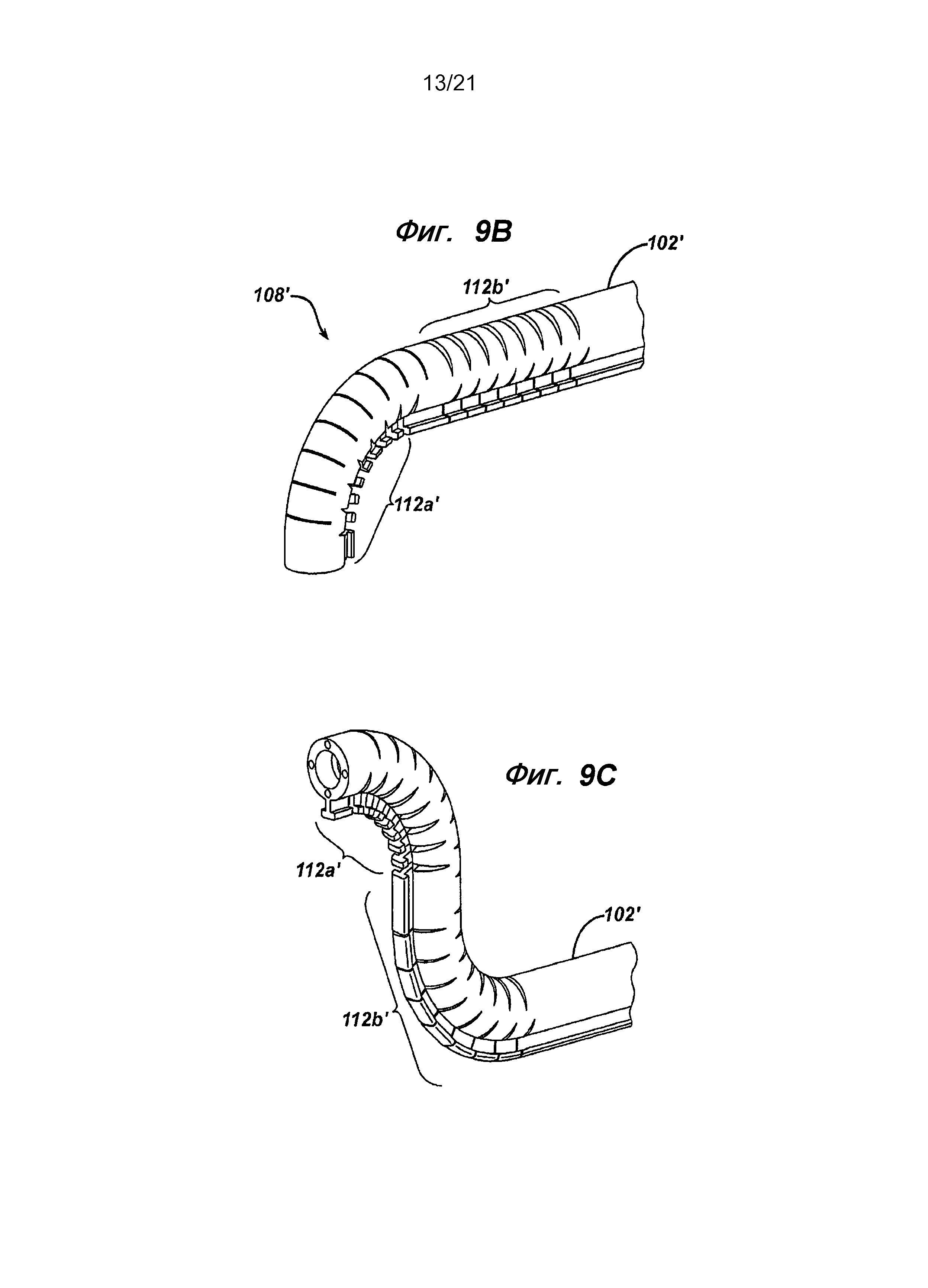
На Фиг. 9B представлен перспективный вид гибкой шейки, показанной на Фиг. 9А, изображающий шейку, повернутую в первом направлении;
На Фиг. 9C представлен перспективный вид гибкой шейки, показанной на Фиг. 9А, изображающий шейку, повернутую во втором направлении;
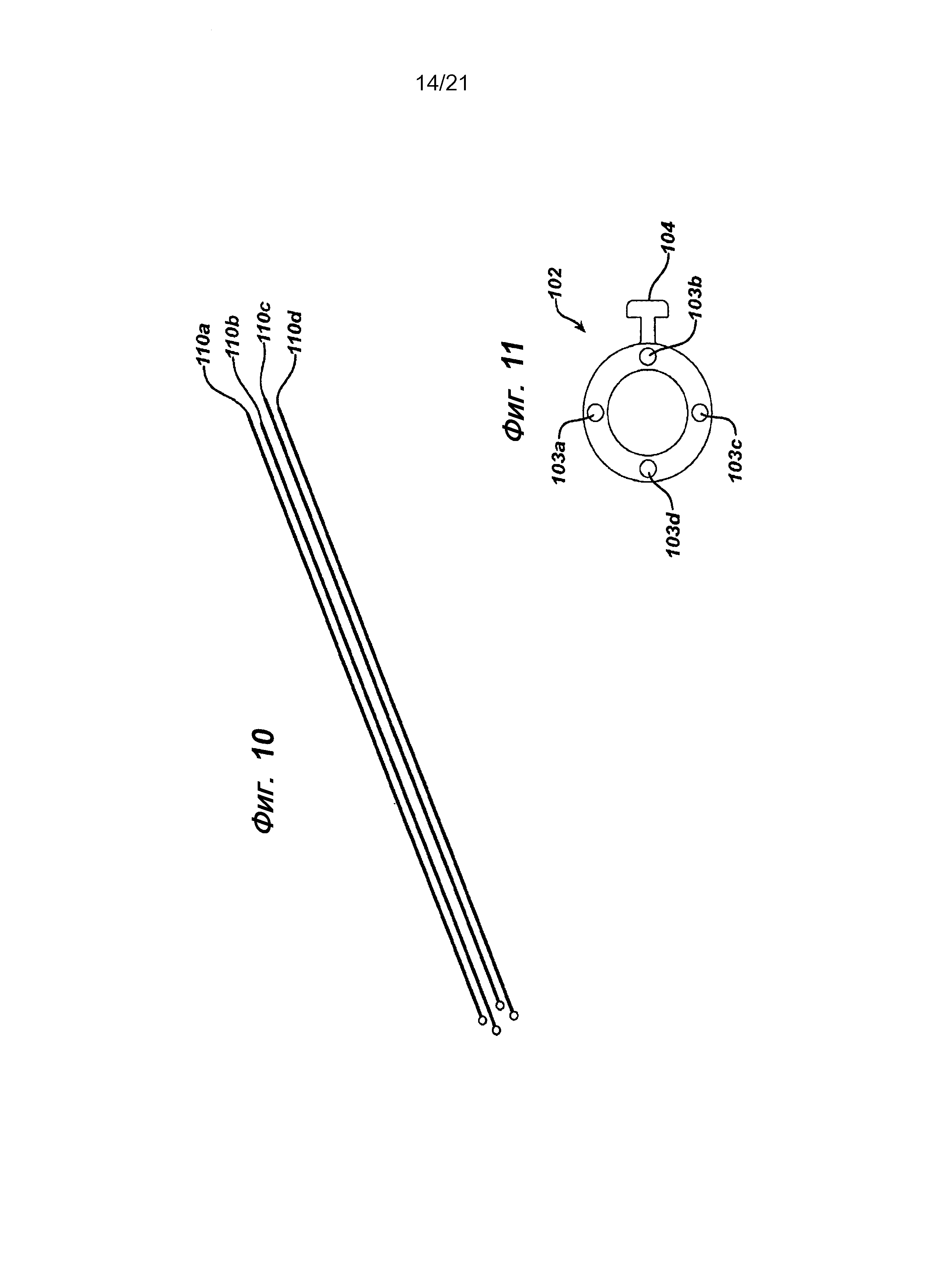
На Фиг. 10 представлен перспективный вид множества кабельных приводных механизмов для использования с устройством, изображенным на Фиг. 7;
На Фиг. 11 показано поперечное сечение ствола вспомогательного желоба, изображенного на Фиг. 7;
На Фиг. 12 представлен перспективный вид одного из вариантов осуществления торцевой крышки для использования с вспомогательным желобом, изображенным на Фиг. 7;
На Фиг. 13A представлено покомпонентное изображение деталей рукоятки и проксимального участка удлиненного ствола прибора, показанного на Фиг. 7;
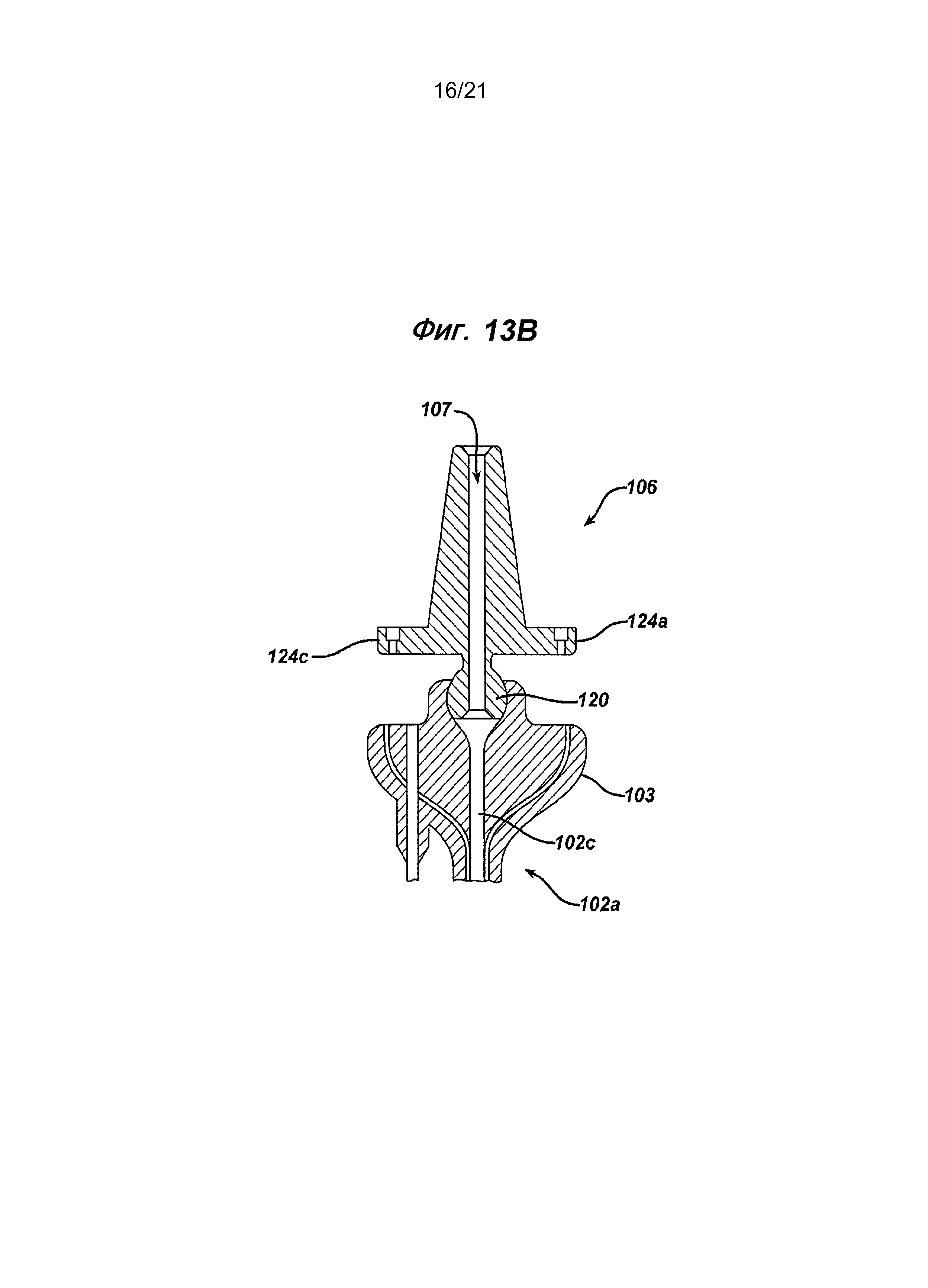
На Фиг. 13B представлено поперечное сечение рукоятки и проксимального участка удлиненного ствола из Фиг. 13А в собранном состоянии;
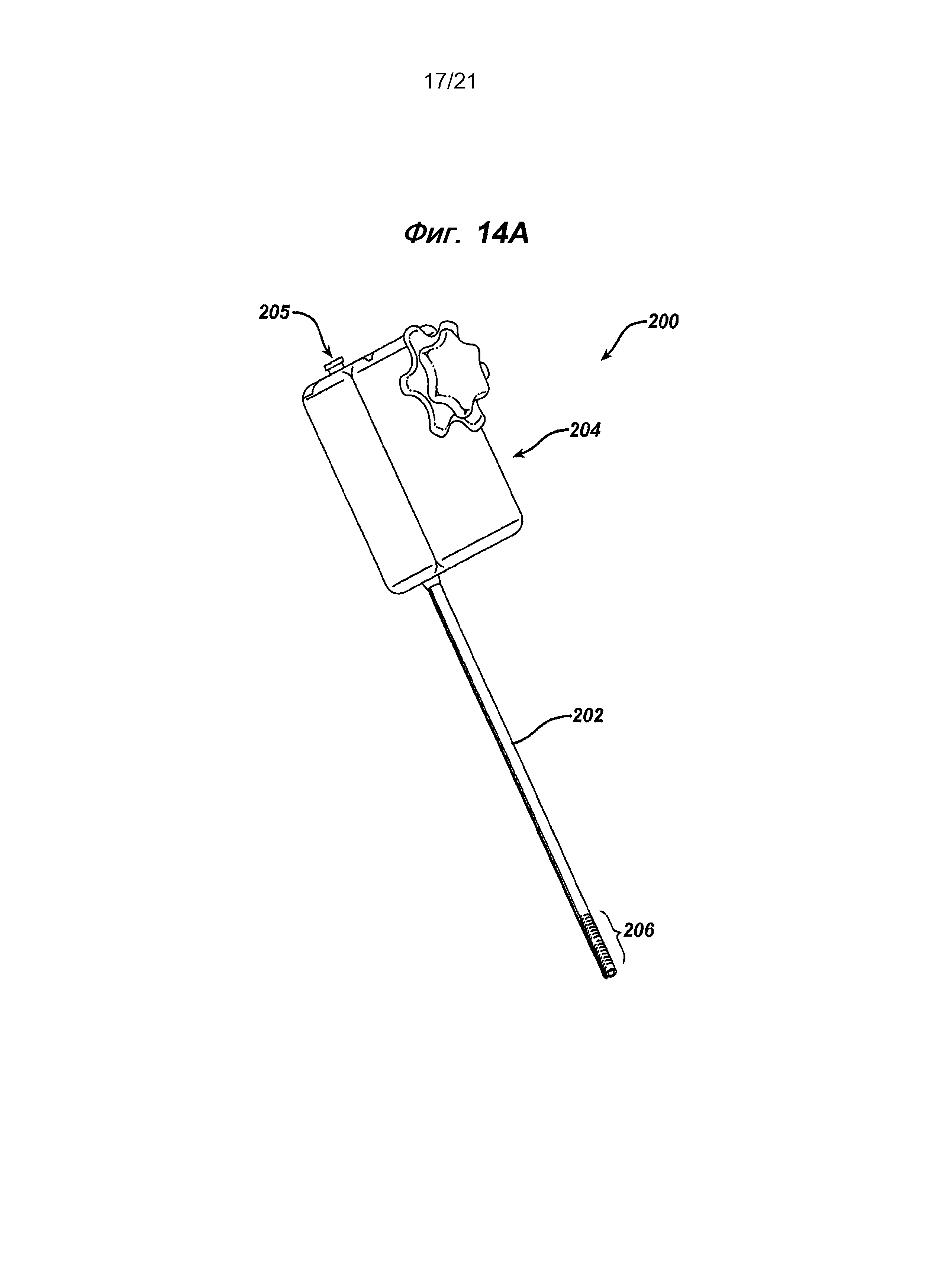
На Фиг. 14A представлено перспективное изображение другого варианта осуществления вспомогательного желоба;
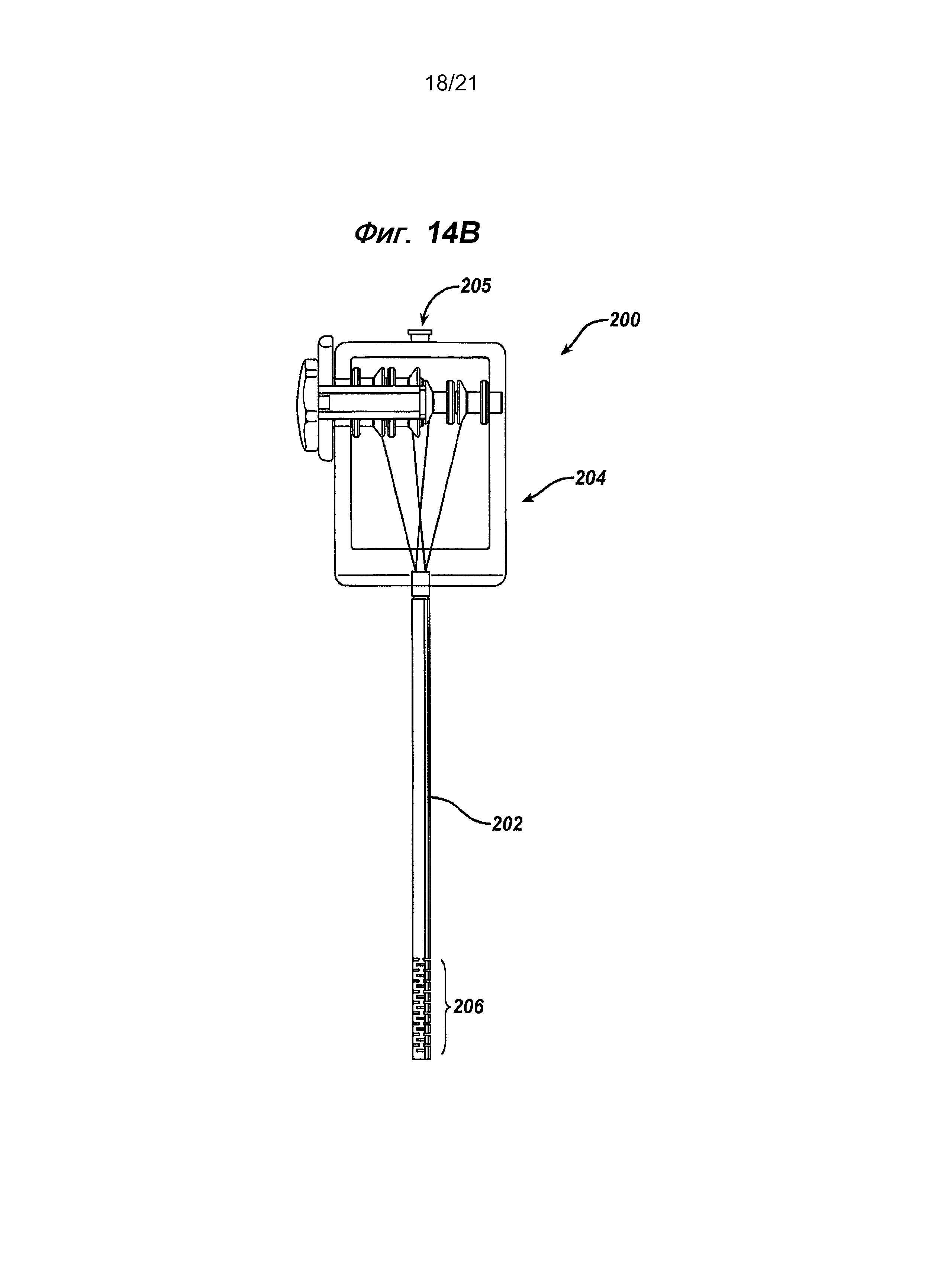
На Фиг. 14B представлено поперечное сечение вспомогательного желоба, изображенного на Фиг. 14А;
На Фиг. 15A представлен вид сбоку сборки рукоятки устройства, изображенного на Фиг. 14А и 14В;
На Фиг. 15B представлено покомпонентное изображение деталей сборки рукоятки, показанной на Фиг. 15А;
На Фиг. 17A представлен перспективный вид варианта осуществления замыкающего механизма; и
На Фиг. 17B представлен перспективный вид замыкающего механизма, показанного на Фиг. 17А, прикрепленного к хирургическому сшивающему и режущему устройству, показанному на Фиг. 1А и 1В.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для общего понимания конструкции, принципов работы, производства и использования устройств и способов, описанных в настоящем документе, ниже приведено описание отдельных примеров осуществления настоящего изобретения. Один или более примеров таких вариантов осуществления представлены на сопроводительных чертежах. Специалисту, обладающему обычными познаниями в данной области, будет очевидно, что устройства и способы, характерно описанные в настоящей заявке, а также проиллюстрированные на сопроводительных чертежах, не ограничиваются иллюстративными вариантами осуществления, и что объем настоящего изобретения ограничивается только лишь формулой изобретения. Особенности, проиллюстрированные или описанные применительно к одному примеру осуществления, могут сочетаться с особенностями других вариантов осуществления. Предполагается, что объем настоящего изобретения охватывает все такие модификации и изменения.
Настоящее изобретение предоставляет способ и устройство для управления рабочим концом эндоскопического хирургического устройства. В общем, эндоскопическое хирургическое устройство состоит из удлиненного ствола, имеющего дистальный рабочий конец с гибкой шейкой, и проксимальный конец с рукояткой для управления движением гибкой шейки на дистальном рабочем конце. В некоторых примерных вариантах осуществления это может быть достигнуто с использованием, например, одного или нескольких тросов, которые проходят между рукояткой и гибкой шейкой так, что перемещение рукоятки прикладывает усилие к одному или нескольким тросам, что вызывает изгибание гибкой части и, таким образом, перемещает рабочий конец устройства. Предусмотрены и другие свойства для облегчения использования устройства. Специалисту в данной области техники будет понятно, что конкретное управляемое устройство и конкретная конфигурация рабочего конца могут быть различны, и что различные методы управления, описанные в данной заявке, могут быть применены практически к любым хирургическим устройствам, в которых требуется управлять движением рабочего конца.
На Фиг. 1A и 1B показан один вариант осуществления метода управления движением концевого исполнительного устройства, а в частности метода воспроизведения движений рукоятки и одновременного движения вместе с ней. В этом варианте осуществления устройство выполнено в виде линейного сшивающего и режущего устройства 10 для наложения множественного линейного ряда скобок на ткань и для разрезания сшитых тканей. Как показано, устройство 10, как правило, включает удлиненный ствол 12, имеющий проксимальный конец 12а с присоединенной с нему рукояткой 14 и дистальный, рабочий конец 12а, имеющий концевое исполнительное устройство 16, присоединенное к нему или сформированное на нем, как это будет обсуждаться более подробно ниже. На практике, концевое исполнительное устройство 16 настроено на повторение движений рукоятки 14. Повторение движений рукоятки 14 концевым исполнительным устройством 16 обычно достигается применением приводного механизма (не показан на фигуре), который располагается между рукояткой 14 и концевым исполнительным устройством 16, способного передавать усилия от рукоятки 14 к концевому исполнительному устройству 16. В примерном варианте осуществления приводной механизм представлен несколькими тросами, которые располагаются на периферии удлиненного ствола 12 и проходят вдоль удлиненного ствола 12. Перемещение рукоятки 14 относительно проксимального конца 12а ствола 12 будет прилагать усилие к одному или нескольким тросам, что приведет к тому, что тросы будут прилагать усилие к концевому исполнительному устройству 16, таким образом, заставляя концевое исполнительное устройство 16 имитировать движение рукоятки 14. Имитирующие движения могут включать в себя относительное движение, при этом концевое исполнительное устройство 16 перемещается в том же направлении и ориентации, что и рукоятка 14, или зеркальные движения, при этом концевое исполнительное устройство 16 перемещается в противоположном движению рукоятки 14 направлении и ориентации. Имитирующее движение также может быть пропорционально движению рукоятки.
Удлиненный ствол 12 устройства 10 может иметь множество конфигураций. Например, он может быть сплошным или полым, а также может состоять из одной детали или из множества сегментов. Как показано на Фиг. 2, удлиненный ствол 12 - полый и состоит из множества соединенных сегментов, что позволяет удлиненному стволу 12 изгибаться. Гибкость удлиненного ствола 12, равно как и относительно малый диаметр, позволяет использовать ствол 12 в ходе эндоскопических процедур, в которых устройство вводится транслюминально через естественное отверстие. Ствол также может быть различной длины, что зависит от назначения применения.
Фиг. 2 далее иллюстрирует один вариант осуществления приводного механизма 22, выполненного в виде нескольких тросов 34а, 34b, 34c, 34d, которые распределены на периферии удлиненного ствола 12 и расположены вдоль удлиненного ствола 12. Количество тросов и их расположение могут быть различными. Например, три троса могут располагаться приблизительно под углом 120° друг к другу на периферии ствола 12. В варианте осуществления, показанном на Фиг. 2 использованы 4 троса 34a, 34b, 34c, 34d, распределенные под углом 90° друг к другу по окружности ствола 12. Каждый трос 34a-d может проходить через канал, выполненный на, в или вокруг удлиненного ствола 12. На Фиг. 2 показаны все тросы 34a-d, которые проведены через канавку, выполненную на внешней поверхности каждого сегмента ствола 12. Таким образом, каждый сегмент имеет 4 канавки, равноудаленно расположенные на окружности ствола 12 для поддержания тросов 34a-d на равном расстоянии друг от друга. Канавки предпочтительно имеют размер, который позволяет удерживать тросы 34a-d внутри них и при этом позволяет тросам 34a-d свободно скользить относительно ствола 12.
Дистальный конец тросов 34a-d может быть присоединен к концевому исполнительному устройству 16 для управления движением концевого исполнительного устройства 16. При том, что концевое исполнительное устройство 16 может иметь множество конфигураций и что могут использоваться различные известные в данной области концевые исполнительные устройства, на Фиг. 3А показан один вариант осуществления концевого исполнительного устройства 16, который, как правило, содержит противолежащие первую и вторую бранши 18, 20, которые выполнены с возможностью размещения ткани между ними. Первая бранша 18 приспособлена для того, чтобы включать картридж, содержащий множество шовных скобок, и выполнена таким образом, чтобы входить в ткани, а вторая бранша 20 имеет форму упорного элемента для деформации скобок. Характерная конфигурация и основное действие концевого исполнительного устройства 16 может быть различным, кроме того, могут применяться различные концевые исполнительные устройства, известные в данной области. В качестве неограничивающего примера, патент США № 6978921 под названием «Хирургический сшивающий аппарат, включающий электронно-лучевой режуще-сшивающий механизм», который включен в настоящее описание во всей своей полноте, раскрывает один вариант осуществления концевого исполнительного устройства, которое может быть использовано с настоящим изобретением.
Чтобы концевое исполнительное устройство 16 могло перемещаться относительно удлиненного ствола 12, концевое исполнительное устройство 16 может быть подвижно прикреплено к дистальному концу 12b удлиненного ствола 12. Например, концевое исполнительное устройство 16 может быть шарнирно прикреплено к дистальному концу 12b удлиненного ствола 12 посредством шарнирного или вращающегося соединения. Или же концевое исполнительное устройство 16 может содержать гибкую шейку 26, сформированную на нем, как показано на фигуре, чтобы концевое исполнительное устройство 16 могло перемещаться относительно удлиненного ствола 12. Гибкая шейка 26 может быть встроенной в дистальный конец 12b ствола 12 и/или в проксимальный конец браншей 18, 20, либо же может быть отдельным звеном, расположенным между валом 12 и браншами 18, 20. Как показано на Фиг. 3А, гибкая шейка 26 содержит первое сцепное устройство 28 для присоединения гибкой шейки 26 к проксимальному концу противоположно направленных браншей 18, 20 и второе сцепное устройство 30 для присоединения гибкой шейки 26 к дистальному концу удлиненного ствола 12. Сцепные устройства 28, 30 могут съемными или зафиксированными на гибкой шейке 26 и/или на браншах 18, 20 и вале 12. Сцепные устройства 28, 30 также служат для размещения определенных компонентов концевого исполнительного устройства 16. Например, первое сцепное устройство 28 может служить для крепления внутри него тросов, как будет описано далее, а также он может использоваться для размещения сборочного узла редуктора и привода, используемого для приведения браншей 18, 20 в действие (например, для сшивания и резания).
Для облегчения изгиба гибкой шейки 26 гибкая шейка 26 может содержать одну или несколько прорезей 32, выполненных в ней. Количество, расположение и размер прорезей 32 может быть различным для обеспечения необходимой гибкости. В примере осуществления, показанном на Фиг. 3А, гибкая шейка 26 включает множественные ряды прорезей 32, каждый ряд располагается радиально вокруг гибкой шейки 26, и каждый ряд аксиально распределен по длине гибкой шейки 26. Каждый ряд прорезей содержит две прорези, расположенные на периферии шейки 26, каждый ряд прорезей 32 аксиально удалены друг от друга. В результате получается, что гибкая шейка 26 содержит чередующиеся прорези 32. Специалисту в данной отрасли, очевидно, что специфическая картина прорезей 32 может быть различной, и что Фиг. 3А изображает только лишь одну картину для формирования прорезей 32, которая обеспечивает изгибание гибкой шейки 26. Другая иллюстративная конфигурация прорезей будет более подробно рассмотрена ниже.
Как указано выше, тросы 34a-d могут быть прикреплены к концевому исполнительному устройству 16 для того, чтобы концевое исполнительное устройство 16 могло двигаться согласованно с рукояткой 14. Расположение соединения тросов 34a-d с концевым исполнительным устройством 16 может быть различным в зависимости от требуемого движения. В представленном варианте осуществления дистальный конец тросов 34a-d прикреплен к дистальному концу гибкой шейки 26, а в частности они распространяются до первого сцепного устройства 28 и прикреплены к нему. На Фиг. 3В показано поперечное сечение первого сцепного устройства 28, где изображены 4 канала 28a, 28b, 28c, 28d, по которым проходят 4 тросы 34a, 34b, 34c, 34d, соответственно. Практически любая методика, известная в данной области, может быть применена для крепления тросов 34a-d к сцепному устройству 28, включая, например, механические способы сочленения, такие как клеевое соединение, посадка с натягом, шаровое шарнирное соединение, резьбовое соединение и т.д. На практике крепление тросов 34a-d к дистальному концу гибкой шейки 26 позволит тросам 34a-d передавать натяжение к гибкой шейке 26, когда к тросам 34a-d посредством рукоятки 14 прикладывается аксиальное усилие. Такое натяжение будет вызывать изгибание шейки 26 в направлении, которое определяется степенью усилия натяжения, приложенного к каждому тросу 34a-d, как будет описано более подробно далее.
Рукоятка 14 устройства 10 может использоваться для управления движением концевого исполнительного устройства 16 и, таким образом, направлять его под углом относительно продольной оси A удлиненного ствола 12. При том, что рукоятка 14 может быть выполнена во множестве конфигураций, в одном возможном варианте осуществления рукоятка 14 подвижно прикреплена к проксимальному концу 12а удлиненного ствола 12 таким образом, что движения рукоятки 14 могут быть повторены концевым исполнительным устройством 16. При том, что для присоединения рукоятки 14 к валу 12 могут использоваться различные методики, в варианте осуществления, приведенном на Фиг. 4A-4C, между рукояткой 14 и проксимальным концом 12а удлиненного ствола 12 сформировано шаровое шарнирное соединение. Как наилучшим образом изображено на Фиг. 4В, проксимальный конец 12а удлиненного ствола 12 содержит гильзу 24, сформированную в нем, а рукоятка 14 содержит полусферический шарик 13а, сформированный на ее дистальном конце и выполненный таким образом, что вращательно размещается внутри гильзы 24. Гильза 24 может быть встроенной в проксимальный конец 12а удлиненного ствола 12, либо она может быть выполнена сочленением полого корпуса 12с, как показано на фигуре, с проксимальным концом 12а удлиненного ствола 12. Полусферический шарик 13а также может быть встроенным в рукоятку, либо может представлять собой отдельный элемент, присоединенный к рукоятке 14. Для того чтобы подвижно прикрепить рукоятку 14 к валу 12, полусферический шарик 13а на рукоятке 14 может удерживаться внутри гильзы 24 с помощью тросов 34a-d, которые крепятся к рукоятке 14, как будет описано далее. Впрочем, чтобы подвижно присоединить рукоятку 14 к валу 12 могут применяться и другие методики. Например, шарик 13а может быть сферическим и он может удерживаться внутри сферической гильзы, выполненной в проксимальном конце 12а удлиненного ствола 12, либо сочленяющий элемент, такой как штифт, может проходить сквозь шарик 13а, чтобы удерживать шарик 13а внутри гильзы 24. В то время как на Фиг. 4В изображен шарик 13а, выполненный на рукоятке 14, и гильза 24, выполненная в валу 12, шаровое шарнирное соединение может быть обратным, то есть шарик может располагаться на валу 12, а гильза - в рукоятке 14. Более того, специалисту в этой отрасли будет понятно, что для крепления рукоятки 14 к проксимальному концу 12а удлиненного ствола 12 может применяться множество других методов.
На практике, рукоятка 14 может направляться или шарнирно двигаться относительно ствола 12, что приводит к повторению концевым исполнительным устройством 16 движений рукоятки 14. Это может достигаться присоединением проксимального конца тросов 34a-d к рукоятке 14. Расположение соединения тросов 34a-d с рукояткой 14 может быть различным в зависимости от требуемого движения. В приведенном варианте осуществления тросы (только 3 троса 34a, 34b и 34c показаны на Фиг. 4A) проходят от удлиненного ствола 12 через полый корпус 12с и выходят через щели или отверстия, выполненные в проксимальном конце полого корпуса 12с. Тросы 34a-d затем проходят вокруг шарика 13а на рукоятке 14 и прикрепляются к дистально обращенной поверхности рукоятки 14, которая окружает шарик 13а. Практически любая методика, известная в данной области, может быть применена для крепления тросов 34a-d к рукоятке 14, включая, например, механические способы сочленения, такие как клеевое соединение, посадка с натягом, резьбовое соединение и т.д. Как показано на Фиг. 4А, рукоятка 14 содержит отверстия, выполненные в ней, а проксимальные концы (не показаны на фигуре) тросов могут иметь шарик или другой элемент, сформированный на них и выполненный таким образом, чтобы удерживаться внутри отверстий. Как к тому же показано на Фиг. 4А, тросы (только три троса 34a, 34b и 34c показаны на фигуре) могут сохранять дистанционное расположение на периферии рукоятки 14. Это позволит концевому исполнительному устройству 16 зеркально повторять движения рукоятки 14, как будет более подробно описано ниже. Или же тросы 34a-d могут быть перекрещены до присоединения к рукоятке 14, что позволит концевому исполнительному устройству 16 выполнять движения в том же направлении, в котором двигается рукоятка 14. Например, противоположные тросы 34a и 34c могут быть перекрещены друг с другом и прикреплены к противоположным сторонам рукоятки 14, а противоположные тросы 34b и 34d могут быть подобным образом перекрещены друг с другом и прикреплены к противоположным сторонам рукоятки 14. Тросы 34a-d могут перекрещиваться в любом месте, к примеру, внутри полого корпуса 12с на проксимальном конце 12а ствола 12.
Как далее показано на Фиг. 4А и 4В, рукоятка 14 может также включать другие функции для облегчения пользования устройством. Например, рукоятка 14 может содержать элемент преобразования движения 38, который способен смыкать бранши 18, 20 на концевом исполнительном устройстве 16, и элемент вращения 40, который способен избирательно вращать и приводить в действие концевое исполнительное устройство 16. Элементы преобразования движения и вращения 38, 40 более подробно описаны в заявке под названием и «Хирургический сшиватель и кусачки с приводным механизмом с одним тросом», авторами которой являются Марк Ортиз и соавторы, поданной в тот же день, что и настоящая заявка, а также включенная в качестве справочной информации в настоящую заявку во всей своей полноте. В других вариантах осуществления рукоятка 14 может содержать пусковые устройства, регуляторы и др., используемые для вращения и/или приведения в действие концевого исполнительного устройства 16.
Возвращаясь к Фиг. 1В, на практике рукоятка 14 может быть поворотно или под углом ориентирована относительно проксимального конца 12а удлиненного ствола 12 для того, чтобы оказывать воздействие на имитирующие движения концевого исполнительного устройства 16. В частности, поворот рукоятки 14 относительно удлиненного ствола 12 в первом направлении приведет к приложению усилия к одному или более из тросов 34a-d, в результате чего трос(ы) будет(ут) натянут(ы) в осевом направлении. В результате, задействованные тросы будут передавать натяжение гибкой шейке 26, что вызовет изгиб гибкой шейки. Чтобы предотвратить изгиб удлиненного ствола 12 в ответ на усилие натяжение, приложенное к тросам 34a-d посредством рукоятки 14, гибкая шейка 26 может обладать большей степенью гибкости, нежели удлиненный ствол 12. Это может быть достигнуто, например, применением чередующихся прорезей 32, как описано ранее, либо же в других вариантах осуществления могут использоваться различные материалы, или же удлиненный ствол может содержать стабилизирующий элемент, такой как стержень, проходящий сквозь него, чтобы сделать ствол более жестким, чем гибкая шейка.
Направление движения рукоятки 14 будет повторено концевым исполнительным устройством 16 либо в том же направлении (т.е. относительное движение), либо в противоположном направлении (т.е. зеркальное движение), чтобы позволить пользователю таким образом точно контролировать положение концевого исполнительного устройства 16. В возможном варианте осуществления определенная величина перемещения концевого исполнительного устройства 16 может быть пропорциональна величине перемещения рукоятки 14. То есть, величина перемещения концевого исполнительного устройства 16 может быть эквивалентна величине перемещения рукоятки 14 или может быть пропорционально увеличена или уменьшена относительно величины перемещения рукоятки 14. В определенных вариантах осуществления может потребоваться получить величину перемещения концевого исполнительного устройства 16, увеличенную по сравнению с величиной перемещения рукоятки 14. В результате, незначительное движение рукоятки будет необходимо для выполнения значительных движений концевым исполнительным устройством 16. При том, что для пропорционального увеличения или уменьшения величины перемещения концевого исполнительного устройства 16 может использоваться множество методик, одним вариантом осуществления усиливающего механизма является эксцентриковый кулачок, присоединенный к тросам и увеличивающий передаточное отношение, усилие либо перемещение, тросов 34a-d, когда к тросам 34a-d прилагается натяжение посредством рукоятки 14.
Специалисту в данной отрасли знаний будет понятно, что в то время как в теории движение между рукояткой и рабочим концом устройства может быть пропорциональным, на практике, скорее всего, будет иметь место некоторая потеря усилия, так как усилие передается через удлиненный ствол. Таким образом, термин «пропорциональное движение» используется в настоящей заявке для определения применений, в которых рукоятка и рабочий конец выполнены таким образом, чтобы выполнять пропорциональные движения, но в которых может происходить некоторая потеря усилия во время фактической работы устройства.
Различные устройства, описанные в настоящей заявке, могут включать разнообразие других функций для облегчения их применения. Например, устройство 10, изображенное на Фиг. 1А может содержать аппарат получения оптического изображения, расположенный на дистальном конце удлиненного ствола 12 и выполненный таким образом, чтобы получать изображения во время эндоскопических процедур. При том, что расположение аппарата может быть различным, в одном варианте осуществления аппарат получения оптического изображения может быть расположен на втором сцепном устройстве 30. В частности, на Фиг. 5 показан корпус 42, имеющий уклон, который выпирает из сцепного устройства 30 и содержит в себе аппарат получения оптического изображения. Смотровое окошко 44, образованное на дистально ориентированной поверхности корпуса 42, позволяет аппарату получать изображения концевого исполнительного устройства 16 и окружающего места хирургической операции. Изображения, полученные с помощью аппарата получения оптического изображения, могут передаваться на внешний монитор отображения изображений, расположенный на проксимальном участке устройства или прикрепленный к нему. На Фиг. 6 изображен один вариант осуществления монитора отображения изображений 46, который выступает наружу из рукоятки 14.
Как отмечено ранее, разнообразные методики для управления движением рабочего конца эндоскопического хирургического устройства, описанные в данной заявке, могут использоваться в сочетании с разнообразными медицинскими устройствами. На Фиг. 7 изображен другой вариант осуществления медицинского устройства, которое содержит приводной механизм для управления движением рабочего конца медицинского устройства. В данном варианте осуществления медицинское устройство выполнено в форме вспомогательного желоба 100, предназначенного для использования с эндоскопом. Вспомогательный желоб 100 является внешним устройством, которое может соединяться и скользить вдоль эндоскопа, позволяя вводить сквозь него и располагать в непосредственной близости от окулярного конца эндоскопа другие инструменты, такие как зажим, кусачки и др. В то время как вспомогательный желоб 100 может иметь любую конфигурацию, форму и размер, в варианте, показанном на Фиг. 7 вспомогательный желоб 100 содержит удлиненную трубку или вал 102, имеющий внутреннюю полость, проходящую между его проксимальным и дистальным концами 102а, 102b, используемую для введения инструмента через нее. Вспомогательный желоб 100 может также содержать элемент крепления, выполненный на нем, для сочленения вспомогательного желоба 100 непосредственно с эндоскопом или муфтой или другим устройством, расположенным вокруг эндоскопа. Хотя может быть использован практически любой метод сочленения, в показанном варианте элемент крепления на вспомогательном желобе 100 имеет форму направляющей 104, которая проходит вдоль длины удлиненного ствола 102. Направляющая 104 выполнена с возможностью входа в стыкующуюся дорожку, выполненную в эндоскопе или устройстве, расположенном вокруг эндоскопа, таком, как муфта. Специалисту в данной области будет понятно, что могут применяться различные другие методы для непосредственного или косвенного сопряжения вспомогательного желоба с эндоскопом.
Для того чтобы управлять движением рабочего конца вспомогательного желоба 100, устройство 100 может включать функции, аналогичные ранее описанным. В частности, устройство 100 может иметь гибкую шейку 108, выполненную на или соединенную с дистальным концом 102b удлиненного ствола 102, рукоятку 106, выполненную на или соединенную с проксимальным концом 102а удлиненного ствола 102, и приводной механизм, проходящее между рукояткой 106 и гибкой шейкой 108. В настоящем варианте осуществления приводной механизм сконфигурировано для передачи усилий от рукоятки 106 на гибкую шейку 108 таким образом, что движение рукоятки 106 повторяется гибкой шейкой 108, тем самым позволяя располагать инструмент, проходящей через вспомогательный желоб 100, под нужным углом.
Гибкая шейка 108 может иметь различные конфигурации, а также может быть отдельным элементом, который соединен с удлиненным стволом 102, или же она может быть встроена в удлиненный ствол 102, как показано на Фиг. 7. Шейка 108 может быть изготовлена гибкой благодаря использованию различных методов. Например, шейка 108 может быть изготовлена из одного или нескольких сегментов, которые перемещаются относительно друг друга, и/или она может быть выполнена из гибкого материала. В примерном варианте осуществления, показанном на Фиг. 8A, шейка 108 содержит несколько прорезей 112, сформированных в ней и сконфигурированных для обеспечения максимальной гибкости шейки 108. Хотя размер, количество и ориентация прорезей 112 может изменяться для получения желаемых результатов, в проиллюстрированном варианте осуществления гибкая шейка 108 имеет четыре столбца прорезей (только три столбца прорезей, обозначенных стрелками 112а, 112b, 112с, показаны на фигуре). Каждый столбец располагается в осевом направлении вдоль длины гибкой шейки 108, и каждый столбец содержит четыре ряда прорезей, расположенных радиально вокруг периферии шейки 108. Каждый столбец прорезей 112 также аксиально смещен относительно друг друга, что позволяет прорезям 112 накладываться друг на друга. При использовании, когда натяжение передается на приводной механизм, прорези 112 позволяют шейке 108 гнуться или принимать изогнутую конфигурацию таким образом, что шейка 108 перемещается относительно остальной части удлиненного ствола 102, как показано на Фиг. 8В и 8С.
В других вариантах осуществления прорези могут располагаться таким образом, чтобы позволять шейке сгибаться в нескольких местах или точках изгиба или иным образом позволять шейке сгибаться в заданное положение. В качестве неограничивающего примера, на Фиг. 9А показан другой вариант осуществления гибкой шейки 108, имеющей две области прорезей 112, сформированных в ней. В частности, гибкая шейка 108 включает дистальную область прорезей 112а' и проксимальную область прорезей 112b'. Каждая область 112а', 112b' может содержать любое количество прорезей, расположенных в любом месте для обеспечения желаемой степени гибкости в одном или нескольких желаемых направлениях. Как показано на Фиг. 9А, каждый из проксимальной и дистальной области прорезей 112а', 112b' включает два ряда прорезей, выполненных на противоположных сторонах и проходящих вдоль длины гибкой шейки 108'. При таком использовании, когда натяжение передается на гибкую шейку 108', как будет обсуждаться более подробно ниже, горловина 108' будет изгибаться как в проксимальной, так и в дистальной области 112а', 112b' и, таким образом перемещаться относительно остальных частей удлиненного ствола 102'. Как показано на Фиг. 9B, изгиб может сначала происходить на дистальном участке 112a' шейки 108'. Далее натяжение, воздействующее на шейку 108 ' может привести к изгибу проксимального участка 112b', как показано на Фиг. 9С. В других вариантах осуществления расположение прорезей и/или размер прорезей могут быть сконфигурированы для того, чтобы вызывать изгиб в проксимальной области 112b' прежде, чем это происходит в дистальной области 112a', или же прорези могут быть сконфигурированы так, чтобы вызывать одновременный изгиб в проксимальной и дистальной областях 112b', 112a'. Специалисту в данной области будет понятно, что количество, положение, размер и форма прорезей можно регулировать для получения желаемого результата. Специфическая конфигурация надреза, используемого для образования каждой прорези, также может быть различной. Например, ширина и длина прорези может оставаться постоянной от внешней поверхности удлиненного ствола к внутренней поверхности удлиненного ствола, или же ширина и длина могут увеличиваться или уменьшаться таким образом, что прорезь сужается или иным образом изменяется. В качестве неограничивающего примера, конусоидальная конфигурация может быть сформирована путем формирования прорези, имеющей треугольную форму, причем длина и ширина прорези будут уменьшаться от наружной поверхности к внутренней поверхности удлиненного ствола.
Как указано выше, приводной механизм выполнен с возможностью передачи натяжения на гибкую шейку 108, чтобы вызвать движение шейки 108. приводной механизм может иметь различные конфигурации, но в одном примерном варианте осуществления приводной механизм аналогичен вышеупомянутому приводному механизму и содержит один или несколько тросов, проходящих между рукояткой 106 и дистальным концом гибкой шейки 108 таким образом, что рукоятка 106 и гибкая шейка 108 функционально связаны. Каждый трос может быть выполнен с возможностью передачи натяжения на гибкую шейку 108, чтобы вызывать движение шейки 108 в плоскости движения. Таким образом, когда устройство 100 содержит только один трос, гибкая шейка 108 может передвигаться только в одной плоскости движения. Каждый дополнительный трос может позволить шейке 108 передвигаться в другой плоскости движения. Когда устройство имеет множество тросов, шейка 108 может передвигаться во множестве плоскостей движения. Более того, тросы могут натягиваться одновременно, потенциально позволять движению гибкой шейки 108 на 360°.
Хотя количество тросов может различаться, и устройство 100 может содержать только один трос, в варианте осуществления, показанном на Фиг. 7 устройство 100 содержит четыре кабеля (только три кабеля 110a, 110b, 110c показаны на фигуре). Участок тросов 10a, 110b, 110c, 110d более подробно изображен на Фиг. 10. Как отмечалось выше, тросы 110a-d проходят вдоль длины удлиненного ствола 102 между рукояткой 106 и гибкой шейкой 108. Конкретное расположение тросов 110a-d может варьироваться, но в примерном варианте осуществления тросы 110a-d расположены радиально на периферии удлиненного ствола 102, и они проходят между дистальным концом гибкой шейки 108 и рукояткой 106. Тросы 110a-d могут проходить внутри или снаружи удлиненного ствола 102, или они могут проходить через просветы или каналы, образованные в боковой стенке удлиненного ствола 102. На Фиг. 11 представлено поперечное сечение удлиненного ствола 102, где показаны 4 просвета 103a, 103b, 103c, 103d, образованные в нем. Просветы 103a-d, предпочтительно имеют размер, который позволяет тросам 116a-d скользить в них, и они разнесены по периферии удлиненного ствола 102. Просветы 103a-d проходят между проксимальным и дистальным концами 102а, 102b удлиненного ствола 102, чтобы позволить тросам 110a-d проходить между рукояткой 106 и дистальным концом гибкой шейки 108.
Дистальный конец тросов 110a-d может соединяться с дистальным концом гибкой шейки 108 применением различных методов, но в одном варианте, показанном на Фиг. 12, гибкая шейка 108 включает торцевую крышку 114, соединенную с или выполненную на дистальном конце гибкой шейки. В то время как конфигурация торцевой крышки 114 может изменяться в зависимости от конфигурации приводного механизма, в показанном варианте осуществления торцевая крышка 114 содержит четыре отверстия 114a, 114b, 114c, 114d, сформированные в ней и расположенные на периферии торцевой крышки 114 так, что отверстия 114а-d совпадают с просветами 103а-d в удлиненном стволе 102. Каждое отверстие 114a-d сконфигурировано для размещения одного троса 110a-d. Различные методы сочленения могут применяться для удержания тросов 110a-d внутри отверстий 114a-d. Например, на Фиг. 10 показан шарик, сформированный на конце каждого тросы 110a-d для удержания концов тросов 110a-d в отверстиях. Торцевая крышка 114 также может иметь центральное отверстие 116, выполненное в ней для введения инструмента через него. Отверстие 116 может также способствовать расположению инструмента, введенного через вспомогательный желоб 100.
Проксимальный конец тросов 110a-d может крепиться к рукоятке 106, которая соединяется с проксимальным концом вала 102. В то время как рукоятка 106 может иметь различные конфигурации, в одном примерном варианте осуществления, ранее показанном на Фиг. 7, рукоятка 106 может быть выполнена в виде джойстика, который подвижно соединен с проксимальным концом 102а удлиненного ствола 102 и, в частности, выполнена таким образом, чтобы двигаться относительно проксимального конца 102а удлиненного ствола 102. Манипулирующее движение рукоятки 106 может позволить гибкой шейке 108 повторять движения рукоятки 106, как будет обсуждаться ниже.
При том, что манипулирующие движения могут выполняться применением различных типов соединений, в показанном варианте осуществления между рукояткой 106 и удлиненным стволом 102 выполнено шаровое шарнирное соединение. В частности, как показано более подробно на Фиг. 13А и 13В, проксимальный конец 102а удлиненного ствола 102 включает корпус 103, сформированный в нем и образующий гильзу в его проксимальном конце. Рукоятка 106 содержит шарик 120, который расположен с возможностью перемещения внутри гильзы 118, а джойстик проходит проксимально от шарика 120, таким образом, позволяя рукоятке 106 перемещаться относительно удлиненного ствола 102. Штифт или другой механизм может применяться для удержания шарика 120 внутри гильзы 118 с возможностью перемещения в ней. Специалисту в данной области техники будет понятно, что рукоятка может иметь различные другие формы, и что различные другие методы могут быть использованы для подвижного закрепления рукоятки 106 к удлиненному стволу 102.
Как указано выше, проксимальный конец тросов 110a-d выполнен таким образом, чтобы крепиться к рукоятке 106. Однако рукоятка 106 может содержать элементы для крепления к ней тросов 110a-d. Хотя специфические элементы сочленения могут быть различными в зависимости от конфигурации приводного механизма, в примерном варианте осуществления джойстик 122 на рукоятке 106 содержит четыре ножки 124а, 124b, 124с, 124d, сформированные на нем. Ножки 124a-d разнесены по периферии джойстика 122, так что они по существу выравнены с тросами, и каждая ножка 124a-d сконфигурирована для сопряжения с концом одного из тросов 110a-d. Шаровое шарнирное соединение, как описано выше по отношению к дистальным концам тросов 110a-d, может быть использовано для сопряжения тросов 110a-d и ножек, или же может применяться любой другой метод сочленения, известный в данной области.
Возвращаясь к Фиг. 7, при использовании рукоятка 106 может быть повернута или под углом ориентирована относительно проксимального конца 102а удлиненного ствола 102 для оказания воздействия на имитирующие движения гибкой шейки 108, и таким образом позиционировать инструмент, проходящей через гибкую шейку 108. Как показано на Фиг. 7 и 13В, джойстик на рукоятке 106 может содержать просвет 107, образованный в нем и расположенный соосно с просветом 102с в удлиненном стволе 102 для обеспечения возможности ввода инструмента через устройство 100. В других вариантах осуществления, рукоятка 106 может быть смещена от проксимального конца 102а удлиненного ствола 102 таким образом, что рукоятка 106 присоединена к тросам, но не мешает прямому доступу к отверстию 102с в удлиненном стволе 102.
Для того чтобы управлять движением гибкой шейки 108 и, таким образом, и инструментом, проходящим через нее, рукоятка 106 поворачивается или перемещается относительно проксимального конца удлиненного ствола 102. Например, движение рукоятки 106 в первом направлении приведет к тому, что ножки 124a-d на рукоятке 106 будут передавать усилие к одному или нескольким из тросов 110a-d, в результате чего трос(ы) будут тянуться в осевом направлении. В результате, задействованные тросы будут передавать натяжение гибкой шейке 108, что вызовет изгиб гибкой шейки. Чтобы предотвратить изгиб удлиненного ствола 102 в ответ на усилие натяжения, приложенное к тросам 110a-d посредством рукоятки 106, гибкая шейка 108 может обладать большей степенью гибкости, нежели удлиненный ствол 12. Это может быть достигнуто, например, применением прорезей, как описано ранее, или в других вариантах осуществления удлиненный ствол 102 может содержать стабилизирующий элемент, такой как стержень, проходящий сквозь него, чтобы сделать ствол 102 более жестким, чем гибкая шейка 108. Направление движения рукоятки 106 будет повторено гибкой шейкой 108 либо в том же направлении (т.е. относительное движение), либо в противоположном направлении (т.е. зеркальное движение), чтобы позволить пользователю таким образом точно контролировать положение гибкой шейкой 108, а значит и контролировать положение инструмента, проходящего сквозь гибкую шейку 108. В возможном варианте осуществления определенная величина перемещения гибкой шейки 108 может быть пропорциональна величине перемещения рукоятки 106. То есть, величина перемещения гибкой шейки 108 может быть прямо эквивалентна величине перемещения рукоятки 106 или может быть пропорционально увеличена или уменьшена относительно величины перемещения рукоятки 106. В определенных вариантах осуществления может потребоваться получить величину перемещения гибкой шейки 108, увеличенную по сравнению с величиной перемещения рукоятки 106. В результате, незначительное движение рукоятки 106 будет необходимо для выполнения значительных движений гибкой шейкой 108. При том, что для пропорционального увеличения или уменьшения величины перемещения гибкой шейки 108 может использоваться множество методик, одним вариантом осуществления усиливающего механизма является эксцентриковый кулачок, присоединенный к тросам и увеличивающий передаточное отношение, усилие либо перемещение, тросов 110a-d, когда к тросам 110a-d прилагается натяжение посредством рукоятки 106.
Как объяснялось ранее, в то время как в теории движение между рукояткой и рабочим концом устройства может быть пропорциональным, на практике, скорее всего, будет иметь место некоторая потеря усилия, так как усилие передается через удлиненный ствол. Таким образом, термин «пропорциональное движение» используется в настоящей заявке для определения применений, в которых рукоятка и рабочий конец выполнены таким образом, чтобы выполнять пропорциональные движения, но в которых может происходить некоторая потеря усилия во время фактической работы устройства.
Хотя Фиг. 1A и 7 иллюстрируют устройства, в которых рабочий конец имитирует движение рукоятки, рукоятка может иметь множество других конфигураций, в которых она способна управлять рабочим концом устройства без применения имитирующих движений рабочего конца устройства. Фиг. 14А и 14В иллюстрируют другой вариант осуществления устройства 200, имеющего рукоятку 204, которая содержит вращающийся элемент, который способен управлять гибкой шейкой 206 в одной или нескольких плоскостях движения относительно удлиненного ствола 202 устройства. В общем, удлиненный ствол 202 устройства 200 очень похож на удлиненный ствол 102 описанный ранее, и он обычно содержит гибкую шейку 206, соединенную с его дистальным концом или сформированную на нем. Четыре управляющих тросы (не показаны на фигуре) проходят через удлиненный ствол между рукояткой 106 и гибкой шейкой 206. Вал 102 и управляющие тросы аналогичны валу 102 и управляющим тросам 110а-d, описанным ранее по отношению к устройству 100, и, таким образом, они не будут описываться подробно.
Рукоятка 204 устройства 200 показана более подробно на Фиг. 15A и 15B. В общем, рукоятка 204 содержит одну или более катушек, расположенных в ней с возможностью вращения. Каждая катушка сконфигурирована для крепления к одному из управляющих тросов и для управления ним. Таким образом, вращение каждой катушки будет наматывать или отпускать трос, в результате чего гибкая шейка 108 будет изгибаться и двигаться в определенном направлении. Хотя количество катушек может изменяться в зависимости от числа управляющих тросов, в варианте, показанном на Фиг. 15А и 15В, рукоятка 204 содержит четыре катушки 208а, 208b, 210а, 210b. Первые две катушки 208a, 208b, которые соединены друг с другом, и вторые две катушки 210a, 210b, которые соединены друг с другом. Первый трос 212a соединен с первой катушкой 208а и наматывается на нее, а второй трос 212b соединяется со второй катушкой 208b и наматывается на нее. Первый и второй трос 212a, 212b расположены на противоположных сторонах удлиненного ствола 202 и проходят вдоль них. В результате натяжение, приложенное к первому тросу 212а, вызывает перемещение гибкой шейки 206 в направлении в первой плоскости движения, а натяжение, приложенное ко второму тросу 212b, вызывает перемещение гибкой шейки 206 в противоположном направлении в пределах той же плоскости движения. Для того чтобы натяжение прикладывалось только к одному из тросов 212а, 212b, первый и второй тросы 212а, 212b наматываются вокруг первой и второй катушек 208a, 208b в противоположных направлениях. Таким образом, вращение первой и второй катушек 208a, 208b будет наматывать и прилагать натяжение к одному из тросов 212а, 212b при этом разматывая и отпуская натяжение другого тросы 212а, 212b. Третий и четвертый тросы 212с, 212d также намотаны на третью и четвертую катушки 210а, 210b, так что вращение третьей и четвертой и второй катушек 210a, 210b будет наматывать и прилагать натяжение к одному из тросов 212c, 212d при этом разматывая и отпуская натяжение другого тросы 212с, 212d. Третий и четвертый тросы 212с, 212d могут проходить вдоль ствола 102 в положении, радиально смещенном от первого и второго тросы 212а, 212b таким образом, что третий и четвертый тросы 212с, 212d вызывают перемещение гибкой шейки 206 во второй, отличной плоскости движения. Например, третий и четвертый тросы 212с, 212d могут быть смещены от первого и второго троса 212а, 212b примерно на 90 ° таким образом, чтобы тросы 212a-d были все расположены в основном эквидистантно на периферии удлиненного ствола 202. Специалисту в данной области будет понятно, что рукоятка 204 может содержать любое количество катушек и тросов, которое будет позволять оказывать воздействие на перемещение в желаемом количестве плоскостей.
Для того чтобы контролировать катушки 208а, 208b, 210а, 210b, устройство может содержать один или более элемент захвата. Как показано на Фиг. 15A и 15B, первый вращающийся регулятор 214 соединен с первой и второй катушками 208a, 208b, а второй вращающийся регулятор 216 соединен с третьей и четвертой катушками 210а, 210b. Регуляторы 214, 216 могут быть выполнены как единое целое с катушками 208a, 208b, 210a, 210b, или они могут быть соединены с катушками 208a, 208b, 210a, 210b с помощью стержня, который проходит через катушки 208а, 208b, 210а, 210b. В показанном варианте осуществления, первый регулятор 214 сформирован на или непосредственно соединен с первой катушкой 208а, а второй регулятор 216 соединен с третьей и четвертой катушками 210а, 210b с помощью стержня 218, который проходит от регулятора 216 через первую и вторую катушки 208a, 208b, и соединяется с третьей и четвертой катушками 210а, 210b. Другими словами, первая и вторая катушки 208а, 208b расположены с возможностью вращения вокруг стержня 218.
В некоторых примерах осуществления катушки и вращающиеся регуляторы могут также различаться по размеру. В варианте, показанном на Фиг. 15A и 15B, первая и вторая катушки 208a, 208b, а также первый вращающийся регулятор 214, имеют диаметр, который больше, чем диаметр третьей и четвертой катушки 210a, 210b и второго вращающегося регулятора 216. Хотя это и не обязательно, такая конфигурация может быть выгодной, поскольку в таком случае тросы 212a-d располагаются на расстоянии друг от друга, что предотвращает их соприкосновение.
При использовании инструмент можно расположить через удлиненный ствол 202, а регуляторы 214, 216 могут быть повернуты для перемещения гибкой шейки 206 на стволе 202 и, таким образом расположить инструмент так, как это необходимо. Как показано на Фиг. 14А и 14В, рукоятка 204 может содержать просвет 205 проходящий через нее и расположенный соосно с просветом в удлиненном стволе 202 для обеспечения возможности ввода инструмента через рукоятку 204 и вал 202. В других вариантах осуществления, рукоятка 204 может быть смещена по отношению к удлиненному стволу 202 для обеспечения прямого доступа к просвету в удлиненном стволе 202. Когда инструмент располагается через ствол 202, регуляторы 214, 214 могут быть повернуты для перемещения гибкой шейки 206 на дистальном конце удлиненного ствола 202. В частности, первый регулятор 214 может быть повернут в первом направлении, например, по часовой стрелке, чтобы приложить натяжение к одному из тросов, например, к первому тросу 212а, при этом отпуская или разматывая другой трос, например, второй трос 212b. Как результат, натяжение, приложенное к первому тросу 212а, будет тянуть дистальный конец гибкой шейки 206 в проксимальном направлении, в результате чего гибкая шейка 206 будет сгибаться и тем самым перемещаться в первом направлении. Вращение первого регулятора 214 в противоположном направлении, например, против часовой стрелки, будет разматывать первый трос 212а, одновременно наматывая второй трос 212b. Гибкая шейка 206 вернется в свое начальное линейное состояние. Дальнейшее вращение первого регулятора 214 будет продолжать наматывать второй трос 212b, одновременно разматывая первый трос 212а, в результате чего гибкая шейка 206 будет изгибаться и перемещаться в противоположном направлении в той же плоскости движения. Второй регулятор 216 может быть также повернут, чтобы переместить гибкую шейку в другой плоскости движения. Регуляторы 214, 216 также могут (но необязательно) поворачиваться одновременно для перемещения гибкой шейки 206 в дополнительной плоскости движения, отличной от первой и второй плоскостей движения.
В других вариантах осуществления различные устройства, описанные здесь, могут включать в себя замыкающий механизм для блокировки рукоятки(ок) и/или приводного механизма в фиксированном положении для поддержания рабочего конца устройства в желаемом положении или под необходимым углом. В то время как замыкающий механизм может иметь различные конфигурации, в одном примерном варианте осуществления замыкающий механизм может иметь форму зажима, который способен зажимать тросы и тем самым предотвращать их движения для фиксации рабочего конца в желаемой ориентации. Зажим может иметь различные формы и размеры, и он может быть расположен в различных местах на устройстве. На Фиг. 17А и 17В показан один примерный вариант осуществления зажима 300, который расположен вокруг полого корпуса 12с на хирургическом устройстве сшивания и разрезания 10, показанном на Фиг. 1A и 1B. Зажим 300, как правило, кольцеобразный и может быть выполнен с возможностью скольжения или с возможностью вращения в паре с полым корпусом 12с, прилегающим к отверстиям, через которые проходят тросы (только три троса 34a, 34b, 34c, показаны на Фиг. 17В). В начальном положении, зажим 300 расположен на расстоянии от отверстий, что позволяет тросам 34a-d свободно передвигаться сквозь них. Как только рабочий конец устройства, например концевое исполнительное устройство 16, установлен в желаемом положении, зажим 300 может быть перемещен в осевом направлении вдоль полого корпуса 12с до тех пор, пока он не налагается на отверстия и не фиксирует тросы 34а-d, выходящие из них. Зажим 300, таким образом, предотвращает движение тросов 34a-d, когда зажим 300 находится в фиксированном положении. Для перемещения зажима 300 в осевом направлении и для фиксации зажима 300 относительно корпуса 12с, зажим 300 может содержать сопрягающий элемент, образованный на нем и выполненный с возможностью зацепления с соответствующим элементом сцепления, выполненном на корпусе 12c. Как показано на Фиг. 17А и 17В, зажим имеет резьбу 302, выполненную на нем для соединения с соответствующей резьбой (не показана) на корпусе 12c. В результате вращение зажима 300 вокруг корпуса 12с приводит к тому, что зажим 300 перемещается между начальным и заблокированным положением. Специалисту в данной области будет понятно, что возможно применить разнообразные другие методики сцепления. Более того, замыкающий механизм может иметь множество других конфигураций. Например, рукоятка может содержать замыкающий элемент, образованный на нем и сконфигурированный для блокировки рукоятки в фиксированном, настроенном положении.
В других вариантах осуществления, тросы можно использовать для пассивного управления удлиненным стволом через просвет в корпусе, а зажим 300 или другой замыкающий механизм может быть использован для фиксации рабочего конца устройства на месте тогда, когда это необходимо. В такой конфигурации, ручка может просто быть использована для облегчения захвата устройства.
В других вариантах осуществления управляющие тросы, описанные здесь, используемые для оказания воздействия на перемещение рабочего конца устройства, могут быть изготовлены из электроактивных полимерных материалов. Электроактивные полимеры (ЭАП), также известные как искусственные мышцы, являются материалами, которые обладают пьезоэлектрическими, пироэлектрическими или электрострикционными свойствами в ответ на воздействие электрических или механических полей. В частности, ЭАП представляют собой набор проводящих легированных полимеров, которые изменяют форму тогда, когда к ним приложено электрическое напряжение. Проводящий полимер может быть сопряжен с той или иной формой ионной жидкости или геля и электродами, а поток ионов из жидкости/геля в или из проводящего полимера может вызвать изменение формы полимера. Как правило, электрический потенциал в диапазоне приблизительно от 1 В до 4 кВ может быть применен в зависимости от того, какой конкретного полимер и ионная жидкость или гель использованы. Важно отметить, что ЭАП не меняют объема при подаче питания, а они просто расширяются в одном направлении и сжимаются в поперечном направлении. Таким образом, управляющие тросы, описанные ранее здесь, могут быть заменены управляющими устройствами из ЭАП, а рукоятка может быть сконфигурирована для активации источника энергии, чтобы передавать энергию к одному или нескольким из тросов. В примерном варианте осуществления перемещение рукоятки может быть настроено для определения количества энергии, а также тросы (тросов), которые будут получать энергию от источника. В результате перемещение рукоятки все еще может быть повторено рабочим концом устройства, что предоставляет пользователю такой же точный контроль над положением рабочего конца. Источником энергии может быть внутренний источник, такой как батарея, или внешний источник. В других вариантах осуществления управляющие тросы из ЭАП могут дополнять осевое усилие, приложенное к тросу посредством перемещения рукоятки и тем самым пропорционально увеличивать величину движения рабочего конца относительно рукоятки.
В других аспектах, управляющие тросы могут быть выполнены из материала с памятью формы, например, из Нитинола. Такая конфигурация позволяет прикладывать усилия натяжения к тросам для управления концевым исполнительным устройством, но все еще позволяет тросу принять исходную линейную форму без необходимости манипулировать рукояткой.
В еще одном варианте осуществления различные устройства, описанные в настоящей заявке, включая их сегменты могут разрабатываться одноразовыми или многоразового использования. В любом случае, устройство может быть подготовлено к повторному использованию после по меньшей мере одного применения. Эта подготовка может включать в себя любую комбинацию стадий разборки устройства, затем чистки или замены отдельных элементов и последующей повторной сборки. В качестве примера, хирургическое устройство сшивания, показанное на Фиг. 1A и 1B может быть Подготовлено к повторному использованию после того, как устройство было использовано в ходе медицинской процедуры. Устройство может быть разобрано, и любое число конкретных деталей может быть выборочно удалено или заменено в любой комбинации. Например, для хирургического устройства сшивания и резания, картридж, расположенный внутри концевого исполнительного устройства и содержащий множество скобок может быть заменен путем добавления нового картриджа со скобками в концевое исполнительное устройство. После чистки и/или замены отдельных частей устройство можно снова собрать в центрах по ремонту или в операционном блоке непосредственно перед хирургической операцией для последующего использования. Специалистам в данной области будет очевидно, что при восстановлении устройства можно использовать различные способы разборки, чистки/замены и повторной сборки. Использование таких способов, а также полученное в результате восстановленное устройство входят в сферу действия настоящей заявки.
Описанное выше изобретение также имеет применимость в робототехнических хирургических системах. Такие системы хорошо известны в данной области и включают выпускаемые компанией Intuitive Surgical, Inc., Саннивейл, штат Калифорния. Примеры также раскрыты в Патентах США 6783524; 7524320; и 7824401. Все из них этим включены в настоящую заявку в качестве справочной информации. Вообще, робототехнические хирургические системы имеют дистанционно управляемый пользовательский интерфейс для удаленного управления манипулятором, который настроен для взаимодействия и для функционирования хирургических инструментов и систем. Манипуляторы управляются электронной(ыми) системой(ами) управления, которые, как правило, адаптированы к локализованной консоли для взаимодействия с пользователем. Приборы могут получать питание локально от хирургической системы, или они могут иметь изолированные системы электропитания от общей робототехнической системы управления.
Робототехническая хирургическая система содержит управляющий узел, монитор, робот, и по меньшей мере один надежно прикрепленный узел подачи, прикрепленный к манипулятору, имеющий по меньшей мере один хирургический инструмент для выполнения по меньшей мере одной хирургической задачи и выполненный с возможностью отсоединения от дистального конца рычага.
В еще одном варианте осуществления робототехническая хирургическая система включала в себя процессор, по меньшей мере, один датчик для определения расположения по меньшей мере одного соединения, приводимого в действие с помощью двигателя, приемник для приема электрических сигналов, переданных из блока сшивания и контролирующих его движения.
Пример одноразового узла подачи для использования с роботом описан в Патенте США № 6231565 Тови и соавторов. Пример хирургического робота с пропорциональным управлением хирургом описан в патенте США № 5624398 Смита и соавторов.
Другой аспект настоящего изобретения состоит в том, что робототехническая система имеет корпус, манипулятор, который может перемещаться относительно корпуса и имеет узел сшивания с удлиненной трубкой, соединяющей узел сшивания с манипулятором. И удлиненная трубка с узлом сшивания, и узел сшивания сам по себе присоединены с возможностью отсоединения и функционально связаны с роботом-манипулятором. Одна конфигурация узла сшивания может быть снята, а другая конфигурация прикреплена и использована.
Что касается фиг. 1. Робототехническая система содержит соединительный элемент, который разъемно прикреплен к проксимальному концу удлиненного ствола 12 вместо рукоятки 14.
Специалисту в данной области техники будут понятны особенности и преимущества настоящего изобретения на основе описанных выше вариантов осуществления. Соответственно, настоящее изобретение не ограничивается представленными на чертежах и описанными вариантами осуществления, за исключением случаев, которые оговариваются в прилагаемой формуле изобретения. Все публикации и материалы, цитируемые в настоящем документе, полностью включены в настоящий документ путем ссылки.
Реферат
Изобретение относится к медицине. Хирургический сшивающий и режущий инструмент содержит удлиненный ствол с проксимальным и дистальным концами. Дистальный конец ствола имеет гибкую шейку, отходящую от него. Концевое исполнительное устройство размещено на проксимальном конце гибкой шейки и содержит противолежащие первую и вторую бранши. Бранши выполнены с возможностью размещения ткани между ними. К первой бранше прикреплен картридж, который содержит множество шовных скобок для введения в ткани. Вторая бранша содержит упорный элемент для деформирования шовных скобок. Устройство также содержит пользовательский интерфейс дистанционного управления, прикрепленный к проксимальному концу удлиняющей трубки. Интерфейс функционально связан с гибкой шейкой так, что движение пользовательского интерфейса дистанционного управления имитируется гибкой шейкой. 2 з.п. ф-лы, 16 ил.
Комментарии