Эргономичный циркулярный хирургический степлер - RU2525014C2
Код документа: RU2525014C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение, в целом, относится к устройствам и способам для наложения хирургических крепежных средств, таких как циркулярные хирургические скрепки, на ткань, например, при иссечениях грыжи и подобных операциях, и, в частности, к устройствам и способам, используемым при лапароскопических и эндоскопических операциях.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Существует ряд хирургических операций, для которых требуются инструменты, обеспечивающие наложение хирургических крепежных средств на ткань для создания соединений ткани или прикрепления объектов к ткани. Например, во время иссечения грыжи часто требуется прикреплять хирургическую сетку к нижележащей ткани тела. При лапароскопических операциях, таких как иссечение грыжи, процедуру выполняют в брюшной полости через маленький разрез, тогда как при эндоскопических операциях процедуру выполняют через узкие эндоскопические трубки, введенные через маленькие разрезы в теле. Лапароскопические и эндоскопические операции, в общем, требуют использования длинных и узких инструментов, которые способны проходить глубоко в тело и которые выполнены с возможностью создания уплотнения с разрезом или трубкой, через которые они введены.
При некоторых хирургических методах прикрепляют сетку к ткани или одну ткань к другой ткани для ее упрочнения или восстановления. К типу крепежного устройства, подходящего для таких методов, относится витковое крепежное устройство, содержащее свернутую в спираль часть корпуса, которая оканчивается острым концом, проникающим в ткань, при этом спиральное крепежное устройство ввинчивают в сетку и ткань тела. Пример крепежного устройства такого типа приведен в патенте США №5258000, автора Gianturco, переуступленном компании Cook, Inc.
В патентном документе США 12/022240, авторов Levin и Altman, содержание которого включено в данный документ посредством ссылки, приведено описание приводимого в действие пусковым устройством механического степлера, предназначенного для наложения циркулярной хирургической скрепки. Указанный степлер содержит приводной вал, присоединенный к пусковому устройству. Работа пускового устройства вызывает вращение приводного вала. Шарнирный манипулятор аппликатора присоединен с возможностью вращения к приводному валу в точке поворота. Шарнирный манипулятор аппликатора содержит выходной вал, выполненный с возможностью вращения и присоединенный к кассете, удерживающей циркулярные хирургические скрепки. Указанная кассета расположена за указанной точкой поворота (дистально к ней). Сцепной механизм при начальном перемещении пускового устройства занимает первое положение, при котором обеспечивается поворот шарнирного манипулятора относительно точки поворота до достижения им стопора, и занимает второе положение, при котором во время непрерывного перемещения пускового устройства сцепной механизм создает возможность вращения выходного вала посредством приводного вала с обеспечением наложения циркулярных хирургических скрепок, поступающих из кассеты.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет устройства и способы для наложения хирургических крепежных средств, таких как циркулярные хирургические скрепки, на ткань, например, при иссечениях грыжи и подобных операциях, как подробно изложено ниже. В частности, настоящее изобретение усовершенствует устройство, предложенное в патентном документе США 12/022240.
Таким образом, в соответствии с неограничительным вариантом выполнения настоящего изобретения предложен степлер для наложения циркулярной хирургической скрепки, содержащий рукоятку с первым пусковым узлом и вторым пусковым узлом, которые оба присоединены к шарнирному манипулятору аппликатора, проходящему через приводной вал, присоединенный к рукоятке, причем первый пусковой узел выполнен с возможностью наложения циркулярной хирургической скрепки, поступающей из дистального конца манипулятора аппликатора, а второй пусковой узел выполнен с возможностью изгибания дистального конца манипулятора аппликатора, причем продольная ось рукоятки расположена с наклоном относительно приводного вала. Первый пусковой узел содержит пусковое устройство, которое может быть расположено с наклоном относительно приводного вала.
В соответствии с неограничительным вариантом выполнения настоящего изобретения указанный дистальный конец имеет выполненные на нем прорези в форме части кольца, так что дистальный конец может изгибаться в первом направлении и является по существу жестким во втором направлении, перпендикулярном первому направлению, при этом прорези разнесены в осевом направлении друг от друга вдоль дистального конца.
В соответствии с неограничительным вариантом выполнения настоящего изобретения в заданном поперечном разрезе, перпендикулярном продольной оси дистального конца, у каждой указанной прорези, каждая прорезь содержит первую и вторую прорези, каждая из которых проходит в пределах угла менее 180°, соответственно на верхней и нижней половинах поперечного сечения дистального конца.
В соответствии с неограничительным вариантом выполнения настоящего изобретения первая и вторая прорези завершаются овальными оконечностями, перпендикулярными остальной части прорези.
В соответствии с неограничительным вариантом выполнения настоящего изобретения пусковое устройство проходит от зубчатого колеса, которое поджато поджимающим устройством и которое находится в зацеплении посредством ряда шестерен с манипулятором аппликатора, так что сжатие пускового устройства в направлении рукоятки вызывает поворот дистального конца манипулятора аппликатора.
В соответствии с неограничительным вариантом выполнения настоящего изобретения второй пусковой узел прикреплен к дистальному концу манипулятора аппликатора по меньшей мере одним тяговым тросом.
В соответствии с неограничительным вариантом выполнения настоящего изобретения между вторым пусковым узлом и по меньшей мере одним тяговым тросом присоединен с возможностью вращения рычажный механизм.
В соответствии с неограничительным вариантом выполнения настоящего изобретения рычажный механизм содержит соединительное звено, имеющее подпружиненный элемент, который перемещается в углубление, выполненное в рукоятке, при соответствующем перемещении второго пускового узла.
В соответствии с неограничительным вариантом выполнения настоящего изобретения степлер содержит два тяговых троса, один из которых предназначен для изгибания дистального конца, а другой тяговый трос предназначен для выпрямления дистального конца.
В соответствии с неограничительным вариантом выполнения настоящего изобретения часть указанных прорезей образует пружину, так что сила указанной пружины перемещает манипулятор аппликатора из изогнутого положения в прямое положение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет понятно и оценено более полно из последующего подробного описания, рассмотренного совместно с чертежами, на которых:
фиг.1А-1D представляют собой упрощенные графические иллюстрации хирургического степлера, выполненного и действующего в соответствии с вариантом выполнения настоящего изобретения;
фиг.2А и 2В представляют собой увеличенные упрощенные графические иллюстрации внутреннего механизма хирургического степлера, показанного на фиг.1А-1D, выполненного и действующего в соответствии с вариантом выполнения настоящего изобретения;
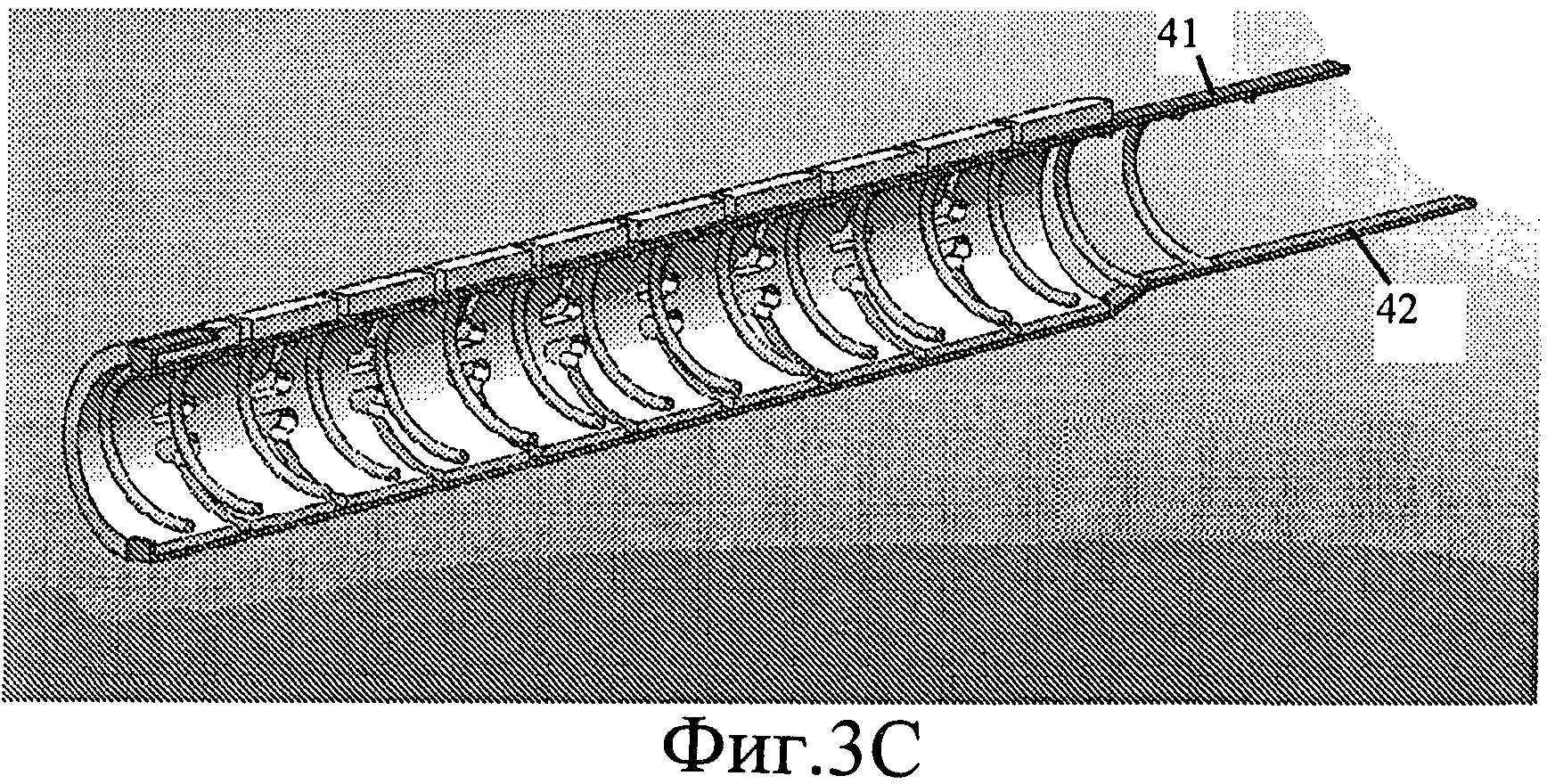
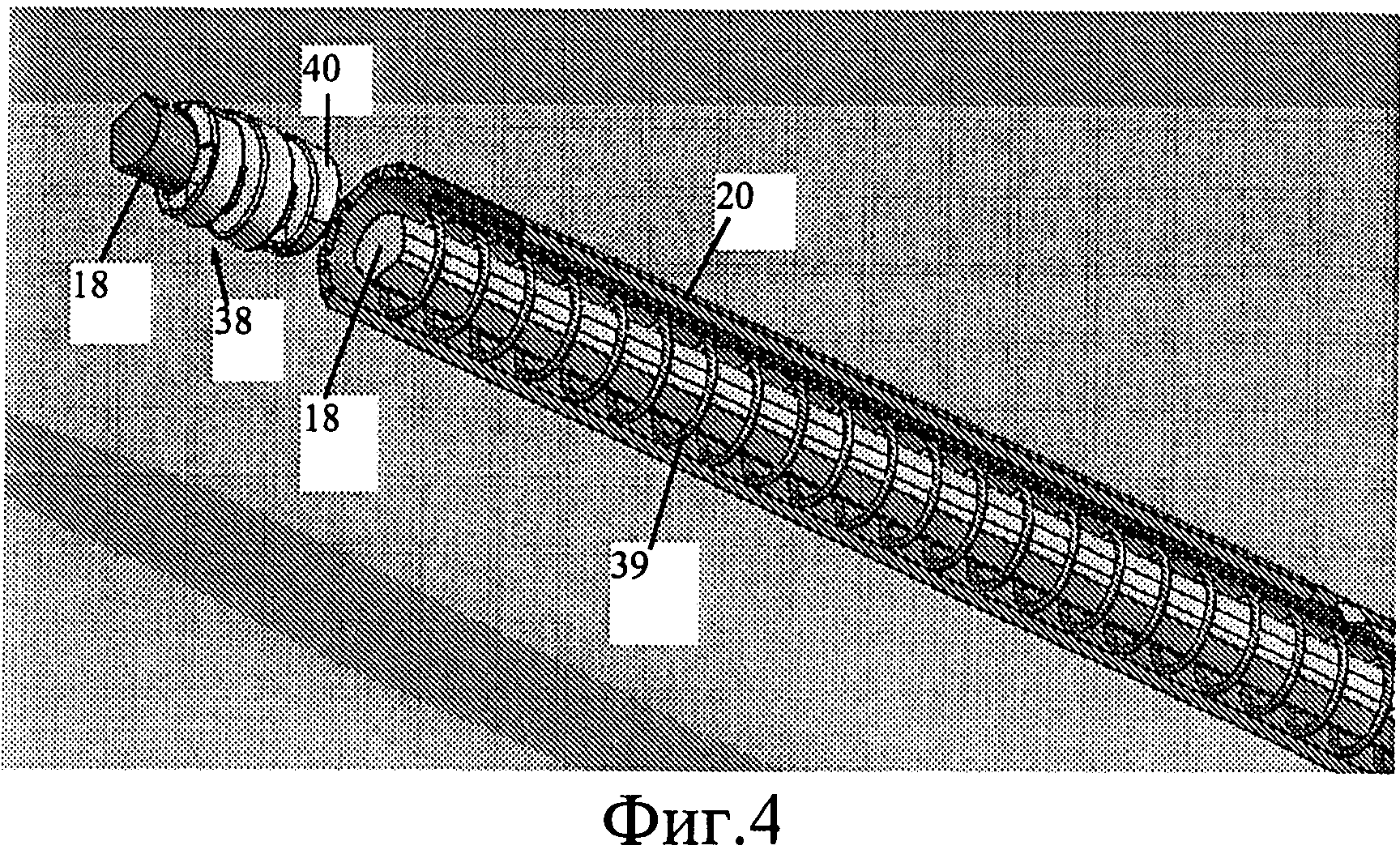
фиг.3А-3С и 4 представляют собой упрощенные графические иллюстрации изгибаемого дистального конца манипулятора аппликатора в соответствии с вариантом выполнения настоящего изобретения;
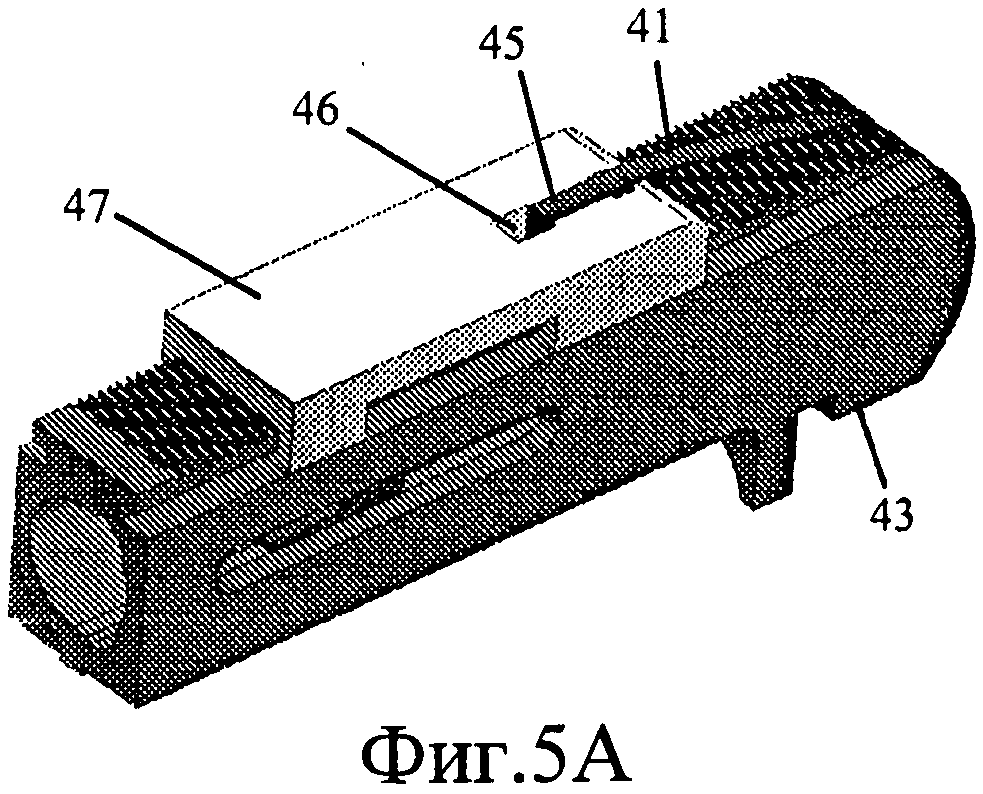
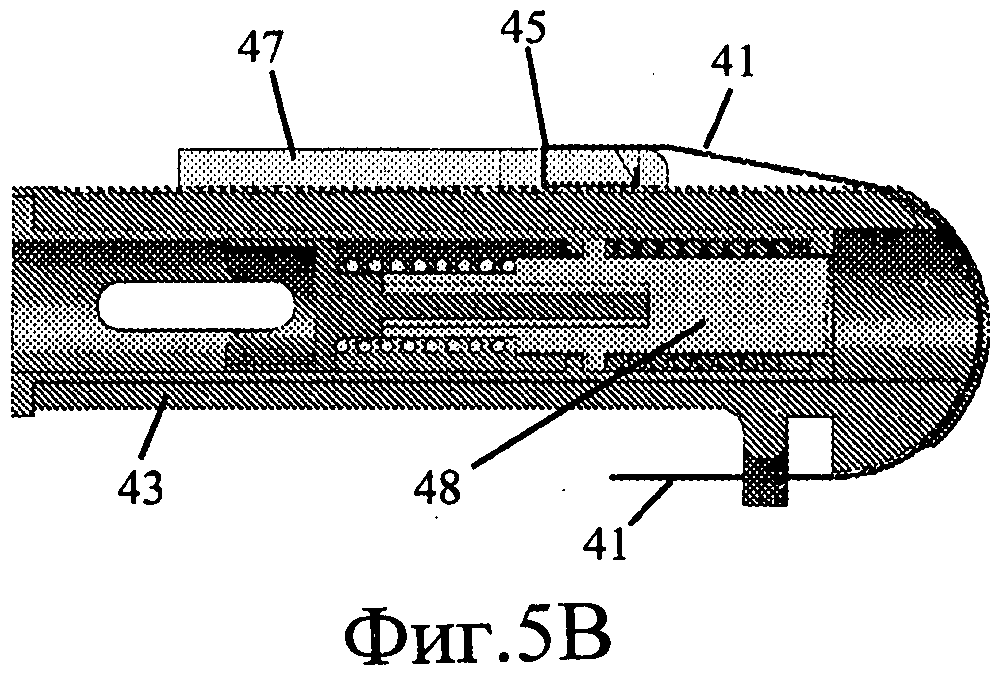
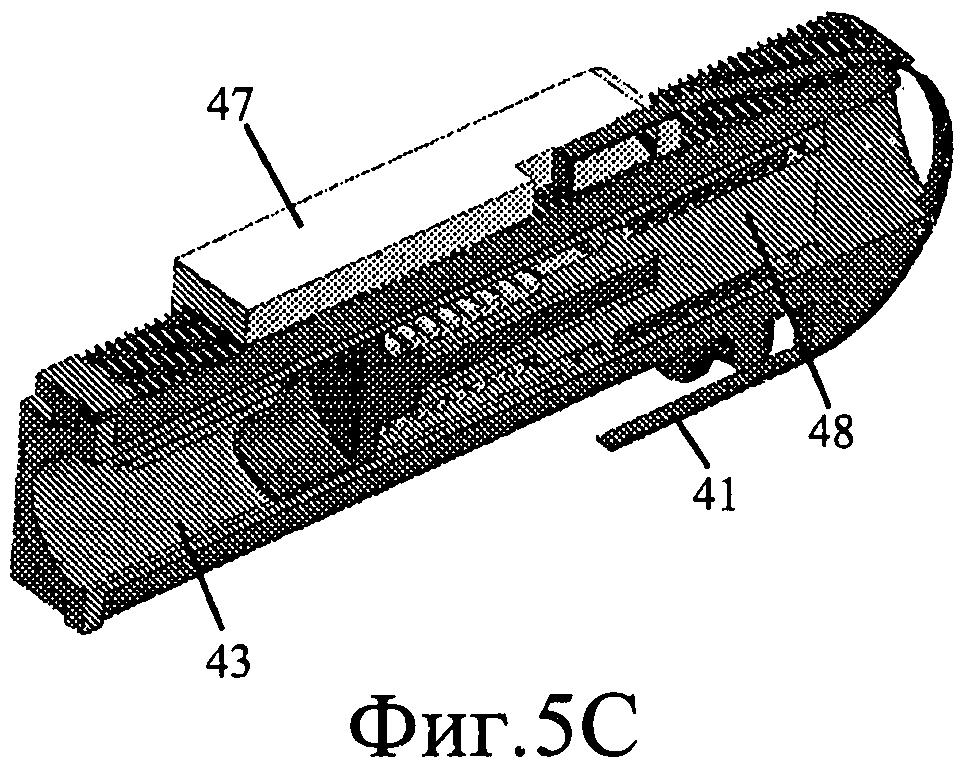
фиг.5А и 5С представляют собой упрощенные графические иллюстрации тягового троса, прикрепленного к тяговому блоку, в соответствии с вариантом выполнения настоящего изобретения;
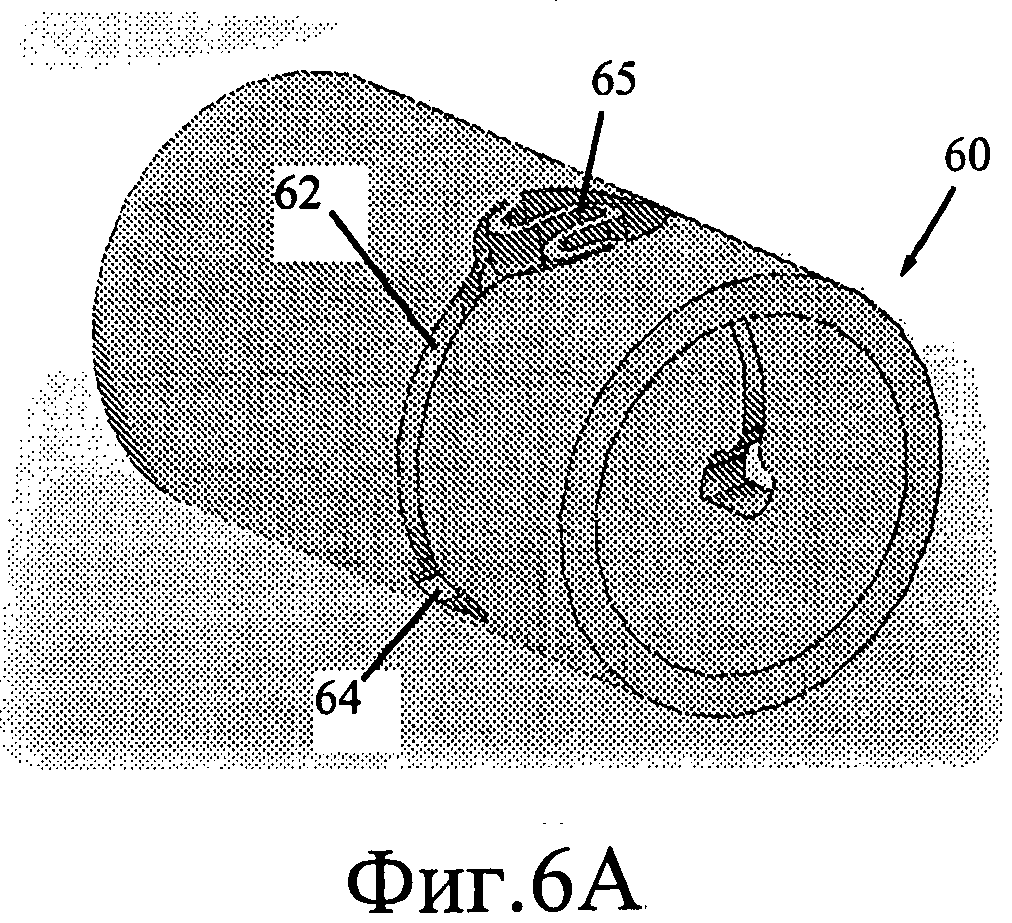
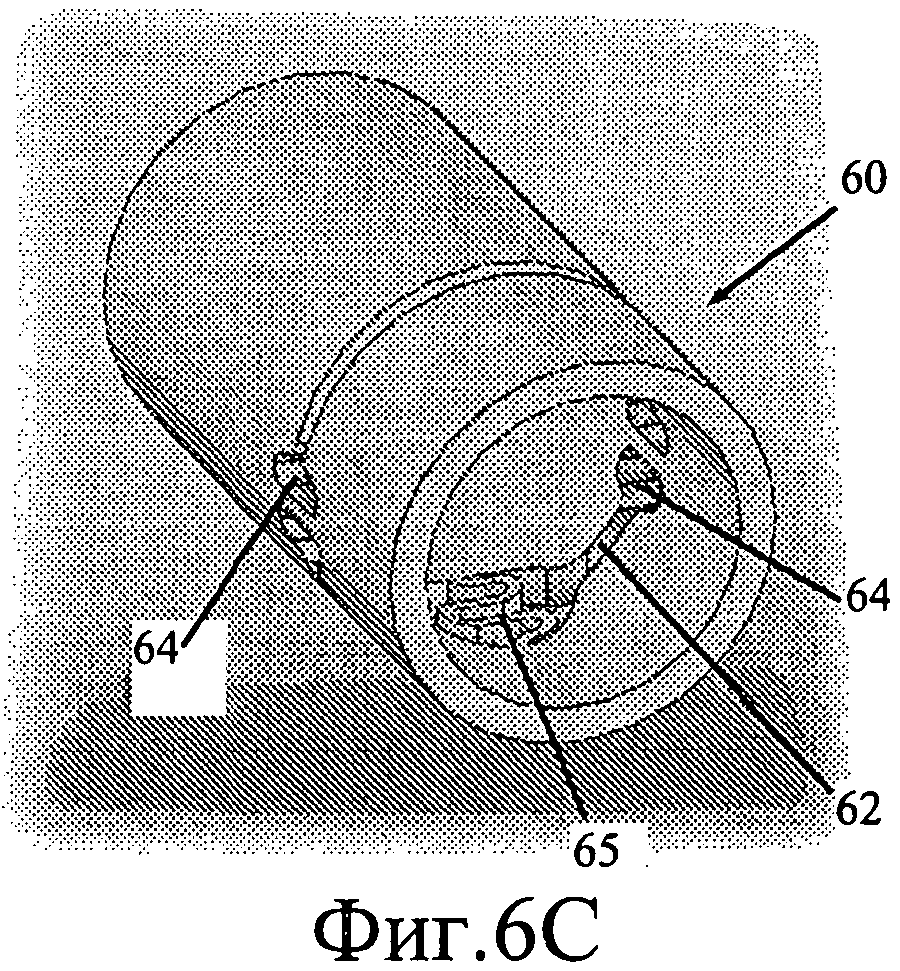
фиг.6А и 6С представляют собой упрощенные графические иллюстрации шарнирного манипулятора аппликатора, выполненного и действующего в соответствии с вариантом выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
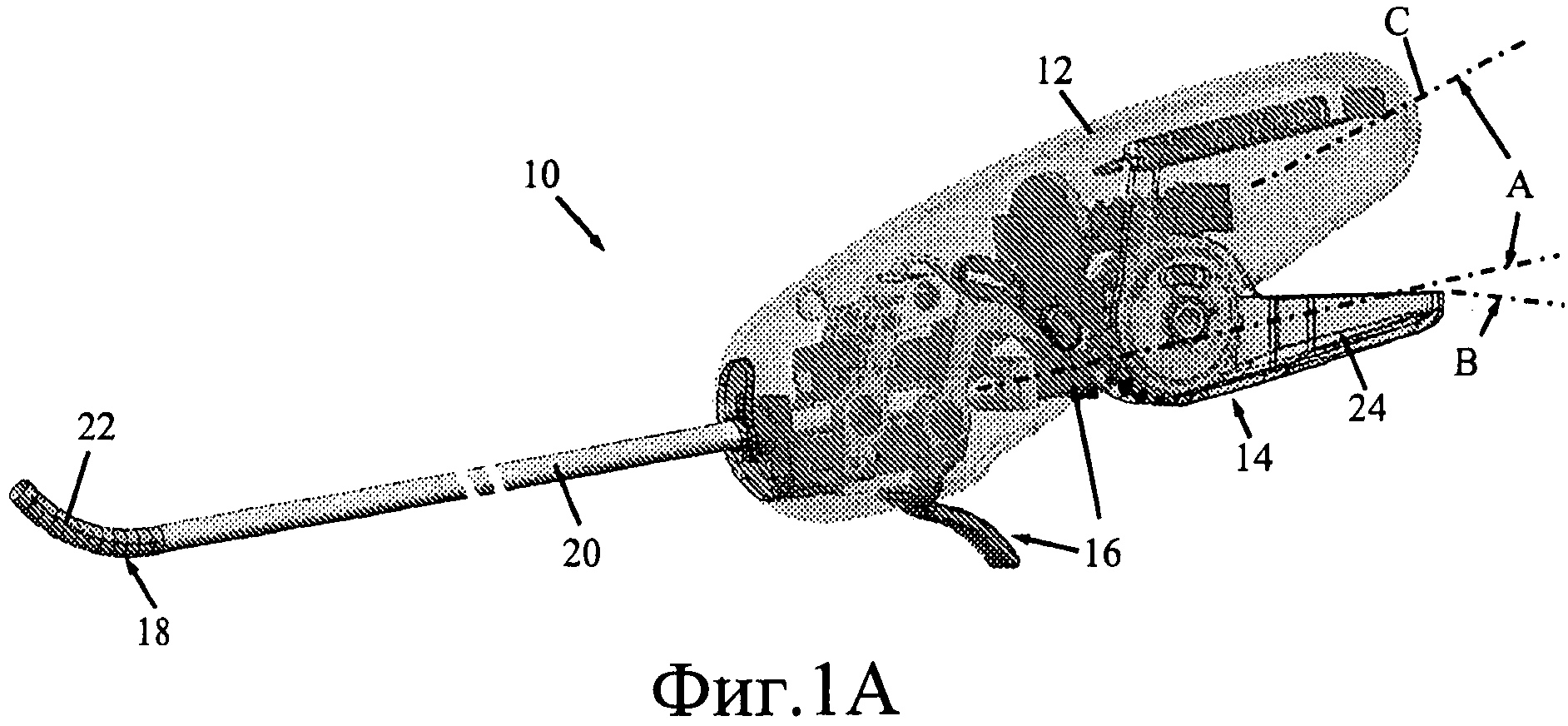
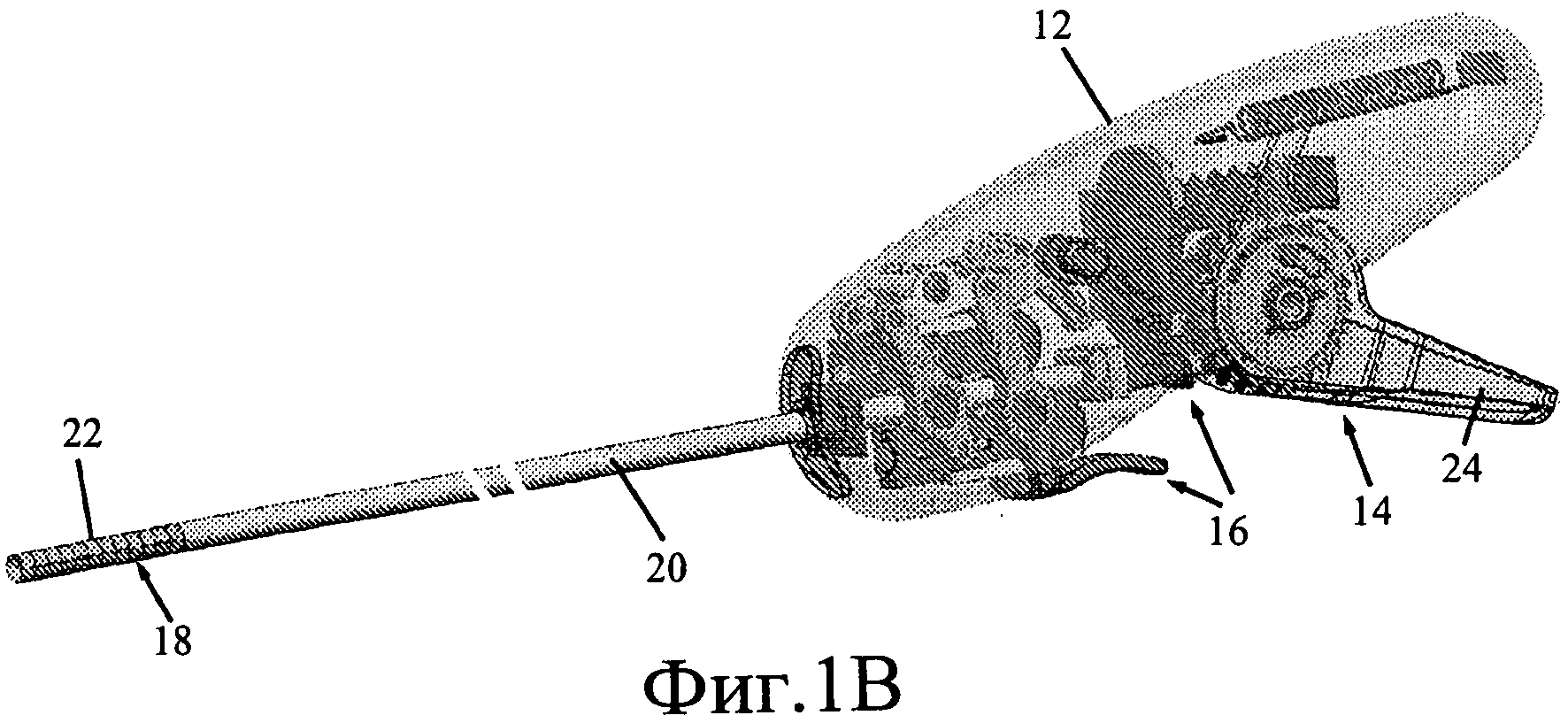
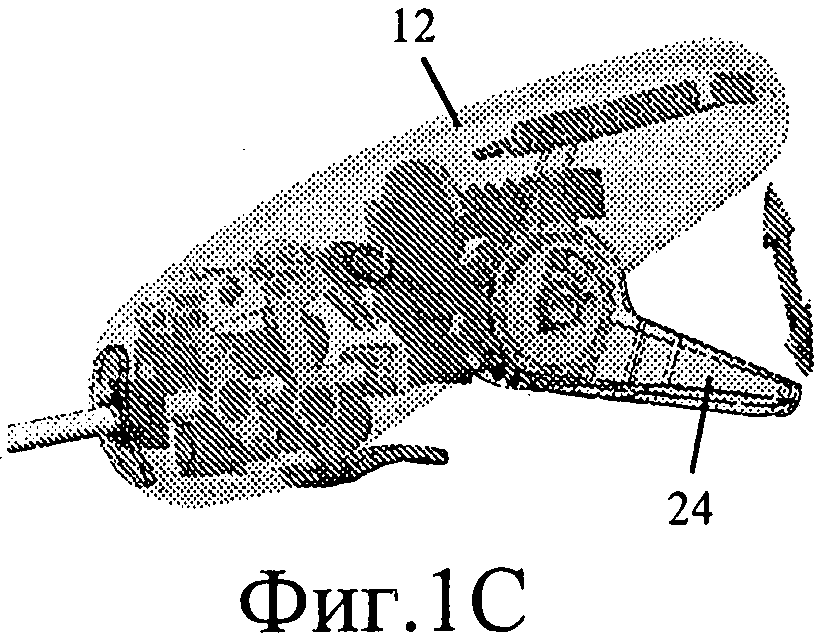
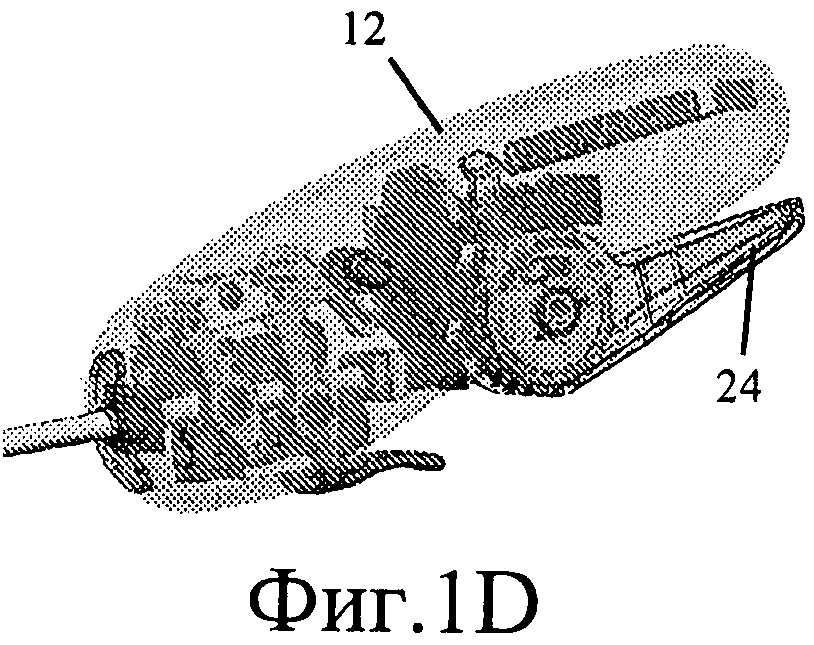
На фиг.1А-1D показан хирургический степлер 10, выполненный и действующий в соответствии с вариантом выполнения настоящего изобретения.
Степлер 10 может содержать рукоятку 12 с первым пусковым узлом 14 и вторым пусковым узлом 16. Оба пусковых узла 14 и 16 присоединены к шарнирному манипулятору 18 аппликатора, который проходит через приводной вал 20. Первый пусковой узел 14 используется для наложения циркулярных хирургических скрепок (на этих чертежах не показаны), поступающих из дистального конца 22 манипулятора 18 аппликатора. Указанная процедура выполняется сжатием пускового устройства 24 в направлении корпуса рукоятки 12 (как показано на сравнительных фиг.1C и 1D), как более подробно объяснено ниже. Второй пусковой узел 16 используется для изгибания дистального конца 22 манипулятора 18 аппликатора вверх (фиг.1А) или вниз (фиг.1В), как более подробно объяснено ниже.
Центральная (продольная) ось С рукоятки 12 наклонена под углом А, составляющим приблизительно 7°-25°, предпочтительно 11°, относительно приводного вала 20 (то есть относительно проксимальной части манипулятора 18 аппликатора, которая остается неизогнутой), как показано на фиг.1А. Наклонное расположение рукоятки 12 является важным эргономическим свойством степлера 10. Хирургические степлеры предшествующего уровня техники имеют пистолетную рукоятку, в которых продольная ось рукоятки совмещена с осью приводного вала или параллельна ему, то есть в этом случае отсутствует наклон. Известные хирургические степлеры являются более громоздкими и при эксплуатации могут вызвать состояние усталости у пользователя. При наличии наклона в соответствии с настоящим изобретением степлер 10 является значительно более удобным при эксплуатации по сравнению с известными степлерами. Другое эргономическое свойство заключается в том, что пусковое устройство 24 относительно приводного вала наклонено под углом В, равным приблизительно 7°-25°, предпочтительно 16°.
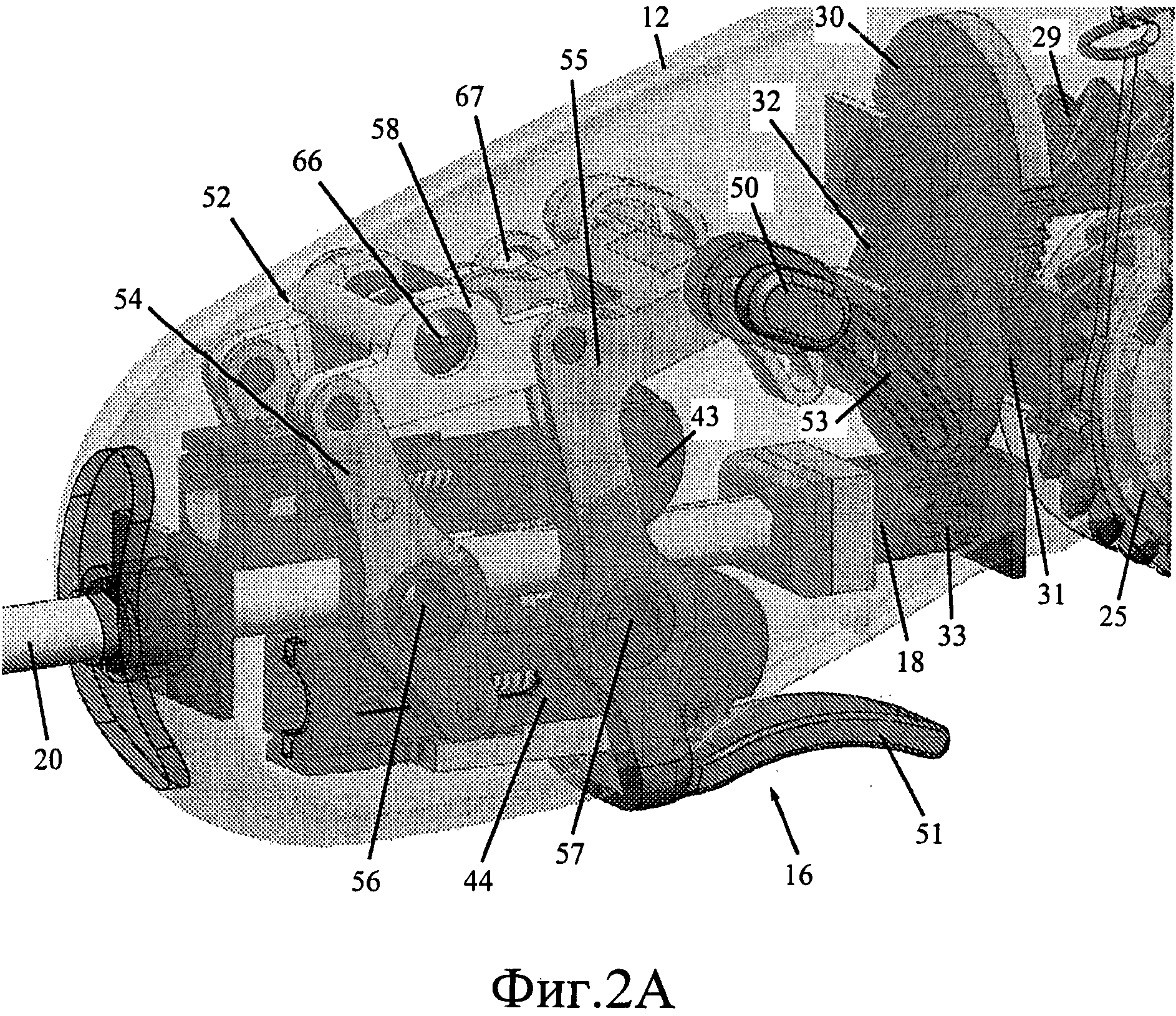
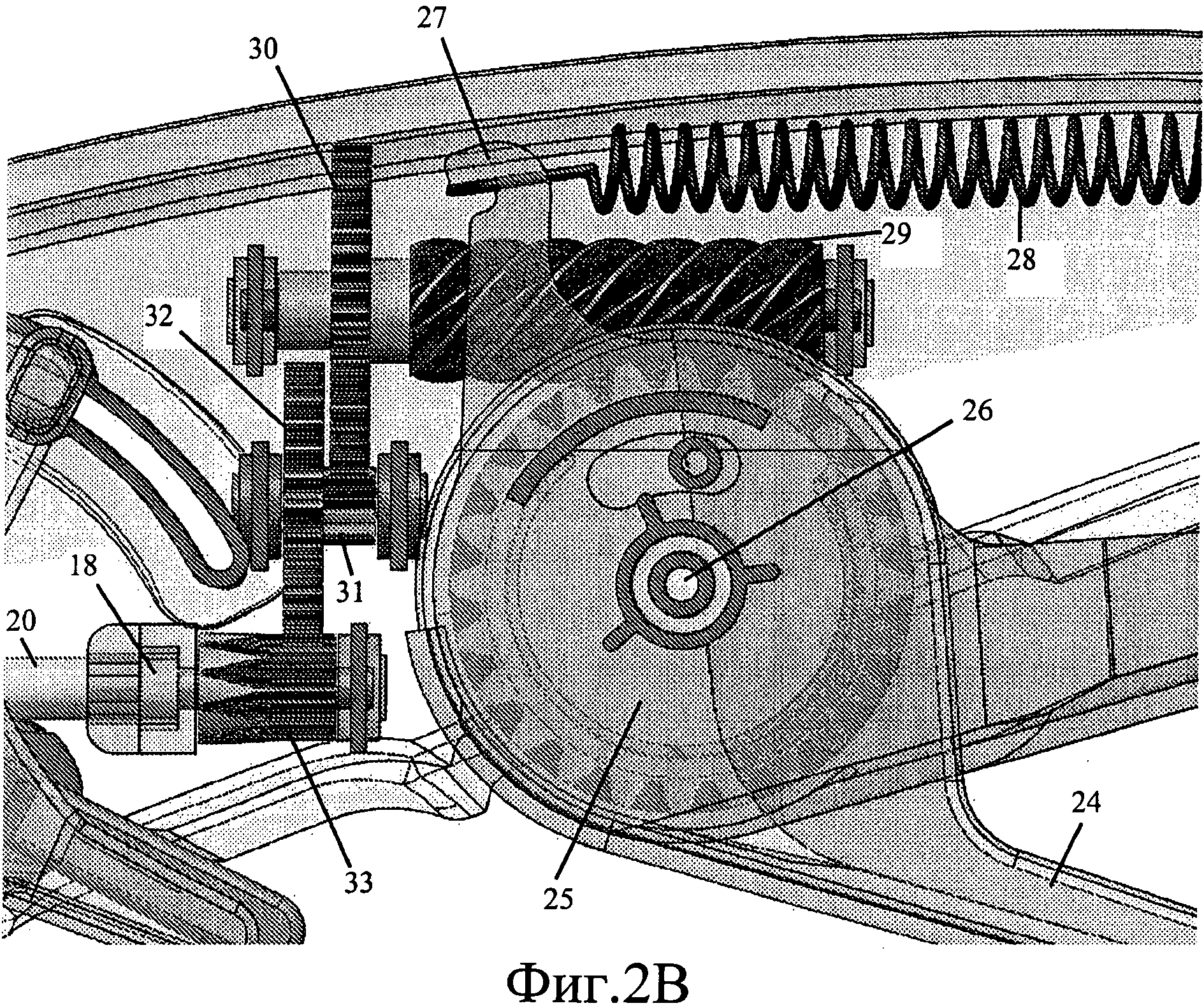
На фиг.2А и 2В показан внутренний механизм хирургического степлера 10 в соответствии с вариантом выполнения настоящего изобретения.
Пусковое устройство 24 проходит от зубчатого колеса 25, которое вращается относительно оси 26. Зубчатое колесо 25 содержит крючок 27, проходящий радиально в наружном направлении и поджимаемый поджимающим устройством 28, например, цилиндрической пружиной. Зубчатое колесо 25 находится в зацеплении с валом 29 червячного колеса, который является валом шестерни 30. Шестерня 30 находится в зацеплении с коротким валом-шестерней 31 другой шестерни 32. Шестерня 32 находится в зацеплении с зубчатым концом-шестерней 33 манипулятора 18 аппликатора, который функционирует посредством приводного вала 20. Сжатие пускового устройства 24 в направлении корпуса рукоятки 12 вызывает поворот зубчатого колеса 25, которое заставляет поворачиваться вал 29 червячного колеса и шестерню 30, которая в свою очередь вызывает поворот короткого вала-шестерни 31 и шестерни 32, обеспечивая тем самым поворот конца-шестерни 33 и манипулятора 18 аппликатора. Поворот дистального конца 22 манипулятора 18 заставляет циркулярную хирургическую скрепку 40 сдвигаться с дистального конца 22 для прокалывания ткани (на фиг.2А-2В скрепка 40 не показана, но видна на фиг.4).
Сжатие пускового устройства 24 в направлении корпуса рукоятки 12 растягивает поджимающее устройство 28. При освобождении пускового устройства 24 поджимающее устройство 28 оказывает тяговое воздействие на крючок 27, заставляя тем самым пусковое устройство 24 возвращаться к его номинальному положению для повторного его сжатия и наложения другой вращающейся хирургической скрепки.
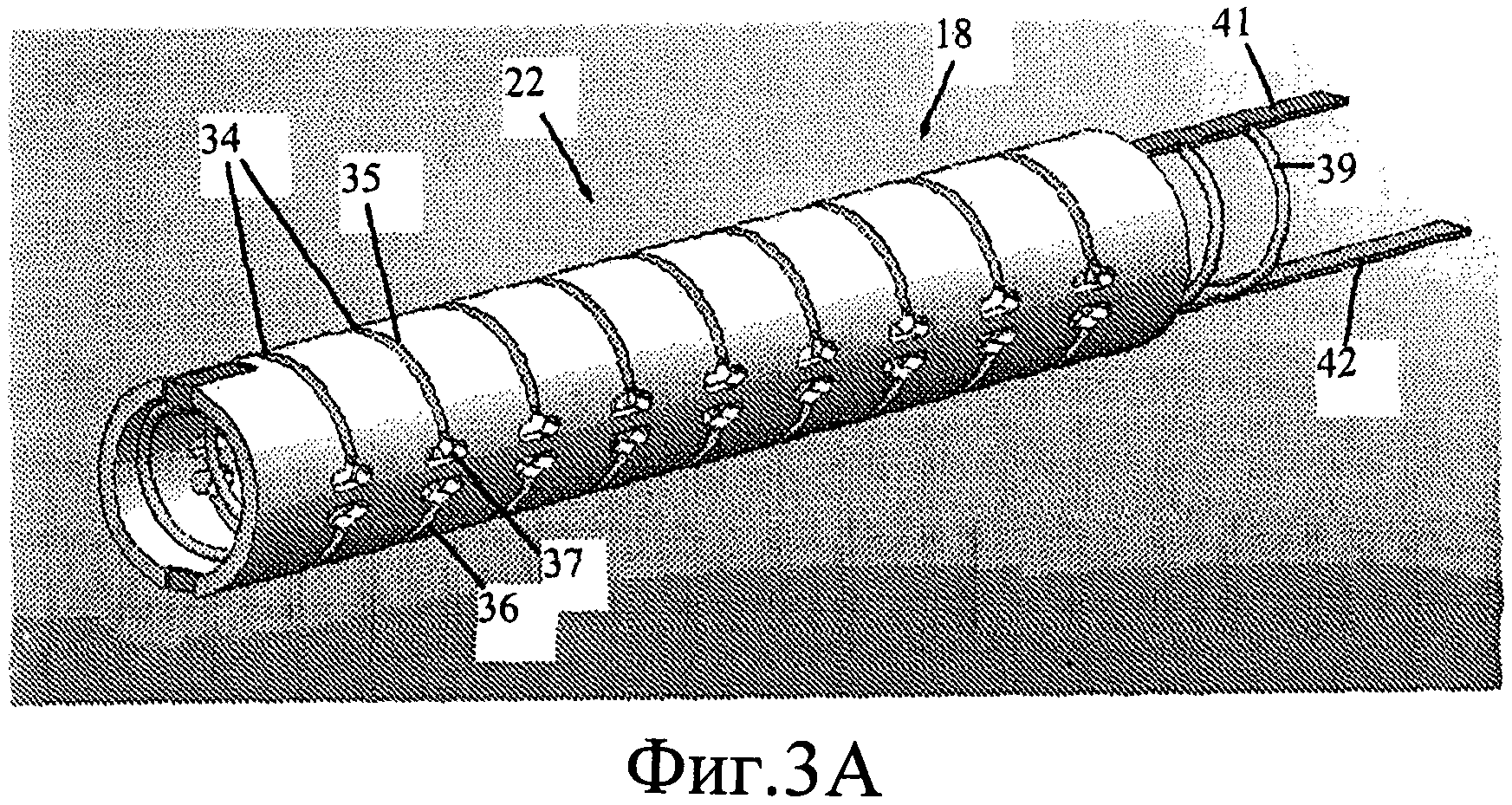
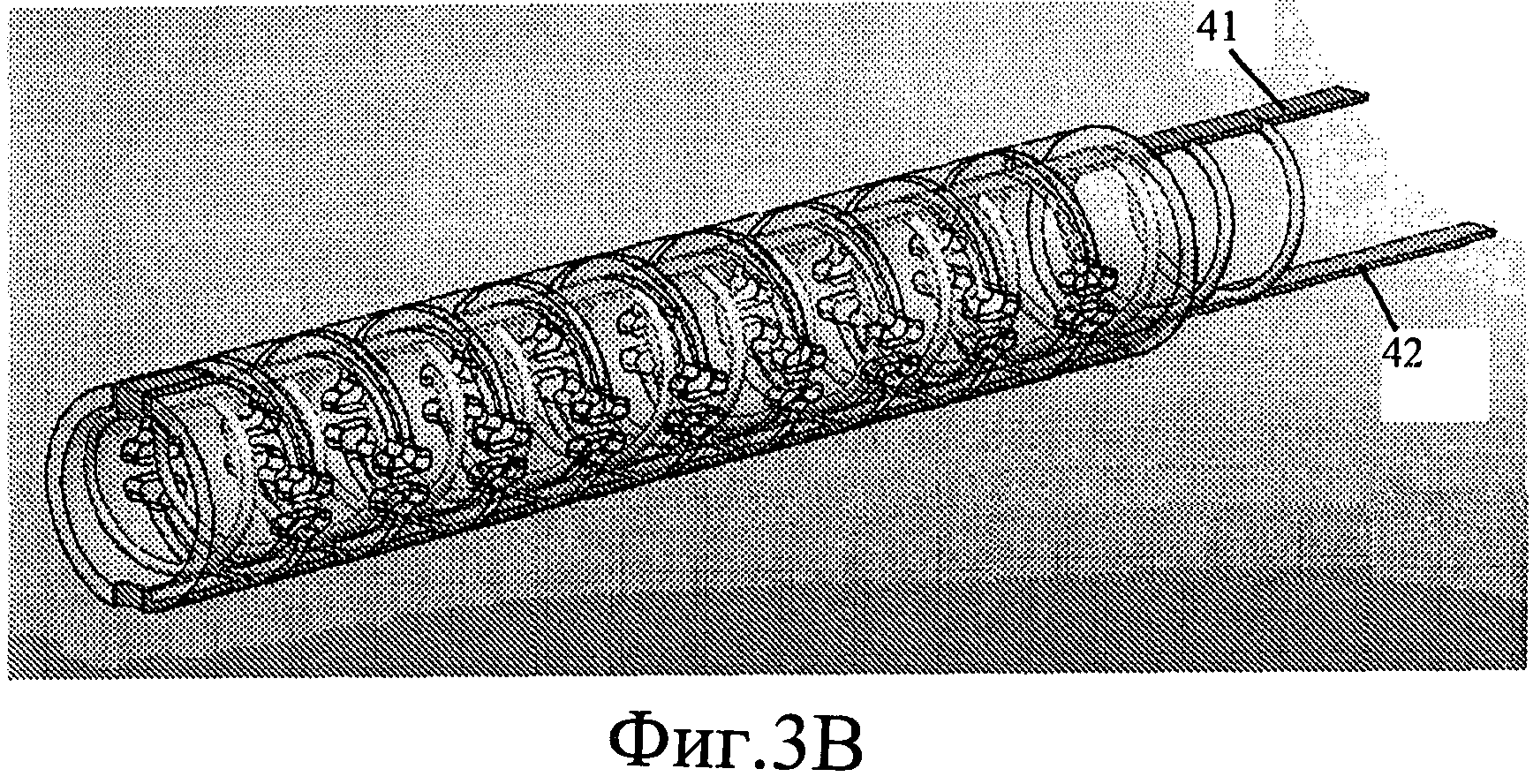
Фиг.3А-3С и 4 иллюстрируют изгибаемый дистальный конец 22 манипулятора 18 аппликатора в соответствии с вариантом выполнения настоящего изобретения.
Дистальный конец 22 выполнен из гибкого материала, например металла или пластика, с расположенными на нем последовательностями прорезей 34 в форме части кольца, полученными, например, с помощью лазерной резки. Прорези 34 выполнены так, что дистальный конец 22 обладает возможностью изгибания в первом направлении (например, вверх и вниз) и, в целом, жесткостью (несгибаемостью) во втором направлении, перпендикулярном первому направлению (например, влево и вправо). Прорези 34 разнесены в осевом направлении друг от друга вдоль дистального конца 22. В иллюстративном варианте выполнения у каждой прорези 34 в заданном поперечном разрезе, перпендикулярном продольной оси указанного дистального конца 22, каждая прорезь 34 имеет первую и вторую прорези 35 и 36, каждая из которых проходит в пределах угла менее 180°, соответственно на верхней и нижней половинах поперечного разреза цилиндрического дистального конца 22. Первая и вторая прорези 35 и 36 завершаются овальными оконечностями 37, перпендикулярными остальной части прорези. Указанные овальные оконечности 37 обеспечивают снятие внутреннего напряжения во время изгибания дистального конца 22.
Как показано на фиг.4, одна или более циркулярных хирургических скрепок 40 расположены на резьбовой части 38 дистального конца 22 манипулятора 18 (на фиг.4 манипулятор 18 изображен с разрывом, чтобы не показывать его полную длину). Витки скрепок 40 помещают в резьбу части 38. По мере вращения манипулятора 18 скрепки 40 дистально продвигаются одна за другой по резьбе, сходят с дистального конца 22 манипулятора 18 и ввинчиваются в ткань (не показана). Скрепка 40 может иметь любую форму, например круговую, квадратную или прямоугольную, пятиугольную или другие формы, а также их сочетания. Поджимающее устройство 39, например цилиндрическая пружина, может быть расположено у дистального конца 22 для продвижения скрепок 40 к концу манипулятора 18.
Соответственно, к верхней и нижней половинам дистального конца 22 манипулятора 18 могут быть прикреплены тяговые тросы 41 и 42. Управление тяговыми торсами 41 и 42 обеспечивается оператором второго пускового узла 16 для поворота манипулятора 18 на любой требуемый угол, например вверх и прямо (хотя данное изобретение не ограничивается этим, поэтому шарнирный манипулятор 18 может быть выполнен для эксплуатации под различными углами).
Обратимся теперь к фиг.5А-5С. Проксимальные концы каждого из тяговых тросов 41 и 42 прикреплены соответственно к тяговым блокам 43 и 44 (на фиг.5А-5С показан только тяговый блок 43, так как тяговый блок 44 имеет аналогичную конструкцию). Например, проксимальный конец 45 тягового троса 41 протянут по закругленному концу блока 43 и закреплен в пазе 46 пластины 47. Пластина 47 на нижней поверхности снабжена зубцами, которые находятся в зацеплении с зубцами, выполненными на верхней стороне тягового блока 43. Пластина 47 присоединена к подпружиненному штоку 48, расположенному в тяговом блоке 43. При таком способе во время изготовления указанная пластина 47 может быть помещена поверх тягового блока 43 и зафиксирована в требуемом положении благодаря зацеплению зубцов и действию упругой силы подпружиненного штока 48 с обеспечением тугого натяжения троса 41.
Обратимся снова к фиг.2А, на которой показано, что второй пусковой узел 16 содержит рычаг 50 для большого пальца и рычаг 51 для остальных пальцев, которые оба присоединены к рычажному механизму 52. Рычаг 50 скользит в дугообразном канале 53. Рычажный механизм 52 присоединен с возможностью поворота к тяговым блокам 43 и 44. В показанном варианте выполнения рычажный механизм 52 содержит два рычага 54 и 55, которые совершают поворот, соответственно, относительно осей 56 и 57. Верхние концы рычагов 54 и 55 соединены с возможностью поворота друг с другом соединительным звеном 58. Рычаг 54 присоединен стержнями к тяговым блокам 43 и 44. Рычаг 55 присоединен к рычагу 50 для большого пальца и рычагу 51 для пальцев.
На фиг.2А (а также на фиг.1В) рычаги 50 и 51 показаны в верхних положениях. В верхнем положении верхний конец рычага 55 продвигается вперед (дистально), продвигая тем самым дистально верхний конец рычага 54. При этом действии тяговый блок 44 перемещается назад (в проксимальном направлении) и натягивает трос 42 в проксимальном направлении для выпрямления дистального конца 22 манипулятора 18 аппликатора (фиг.1В). На фиг.1А рычаги 50 и 51 показаны в нижних положениях. В нижнем положении верхний конец рычага 55 оттягивается назад (в проксимальном направлении) с оттягиванием тем самым проксимально верхнего конца рычага 54. При этом тяговый блок 43 перемещается назад (в проксимальном направлении) и натягивает трос 41 проксимально для изгибания дистального конца 22 манипулятора 18 аппликатора вверх.
Соединительное звено 58 снабжено подпружиненным элементом 66 (например, стержнем с закругленными сферическими концами). Когда рычаги 50 и 51 перемещаются к их нижним положениям, то подпружиненный элемент 66 выравнивается с углублением 67, выполненным в стенке рукоятки 12, или около нее, после чего подпружиненный элемент 66 входит с защелкиванием в углубление 67 за счет силы упругости. Конец элемента 66 закруглен так, что когда рычаги 50 и 51 перемещаются из нижних положений, то элемент 66 легко выходит из углубления 67.
Манипулятор аппликатора в варианте выполнения, показанном на фиг.1А-1В, использует два тяговых троса для обеспечения движения изгибания вверх и вниз.
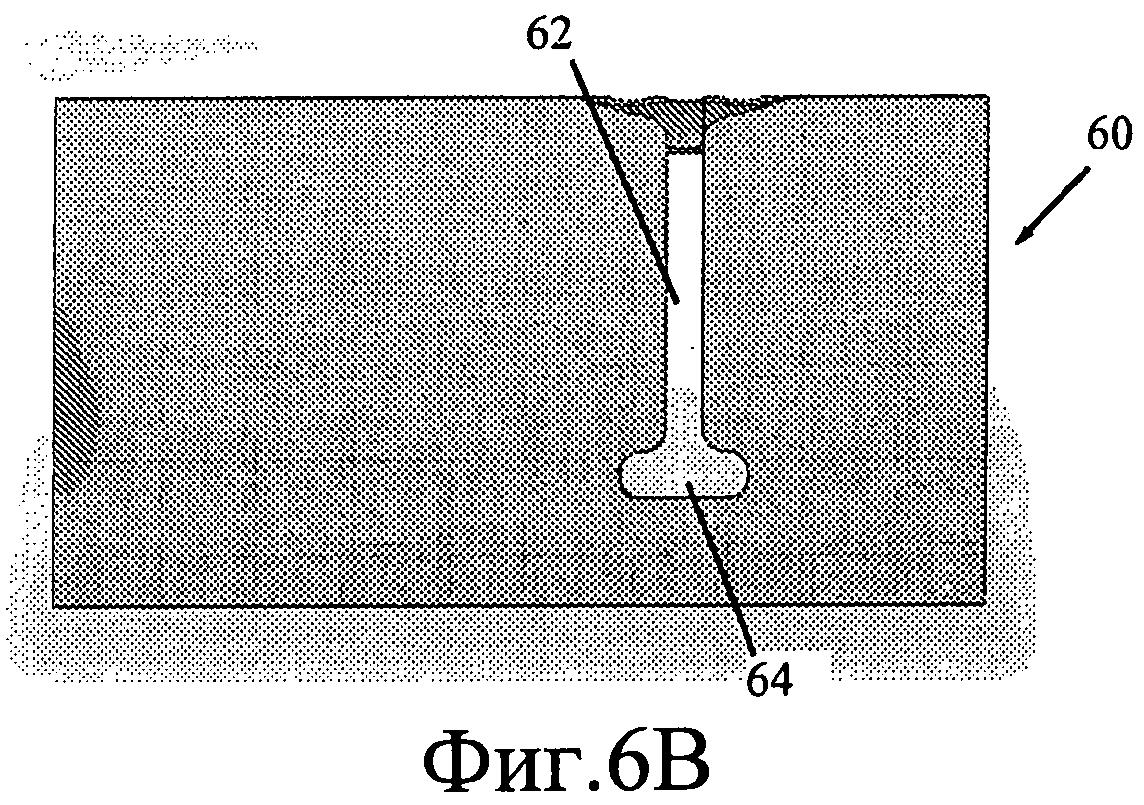
На фиг.6А-6С показана другая конструкция манипулятора 60 аппликатора в соответствии с другим вариантом выполнения настоящего изобретения. В этом варианте выполнения требуется только один тяговый трос.
Дистальный конец манипулятора 60 содержит выполненные на нем одну или более прорезей 62 в форме части кольца, полученных, например, с помощью лазерной резки. Фиг.6А и 6В показывают вариант выполнения только с одной частично кольцевой прорезью 62, тогда как фиг.6С показывает вариант выполнения с дополнительной частично кольцевой прорезью 63 с осевым расположением, аналогичным осевому расположению прорези 62. В варианте выполнения, показанном на фиг.6А и 6В, прорезь 62 проходит в пределах угла более 180°. В варианте выполнения, показанном на фиг.6С, прорези 62 и 63 оканчиваются овальными оконечностями 64, перпендикулярными остальной части прорези. Указанные оконечности 64 обеспечивают снятие внутреннего напряжения во время изгибания дистального конца манипулятора 60.
Прорезь 62 выполнена так, что некоторое количество материала вала манипулятора 60 остается для формирования пружины 65. Пружина 65, являясь частью вала, обеспечивает выпрямление вала, когда рычаги 50 и 51 перемещаются из нижних положений к верхним положениям. Таким образом, манипулятор 60 аппликатора изгибается вверх под действием одного тягового троса (например, троса 41), однако выпрямляется пружиной 65 без необходимости в использовании троса 42.
Специалистам следует понимать, что данное изобретение не ограничивается тем, что конкретно показано и описано выше. Точнее, объем правовой охраны данного изобретения включает как комбинации, так и субкомбинации вышеуказанных свойств, а также модификации и изменения, которые могут встретиться специалисту во время прочтения вышеприведенного описания и которые не известны из уровня техники.
Реферат
Изобретение относится к медицине и может быть использовано для наложения циркулярной хирургической скрепки. Хирургический степлер содержит рукоятку с первым пусковым узлом и вторым пусковым узлом. Пусковые узлы присоединены к шарнирному манипулятору аппликатора, который проходит через приводной вал. Приводной вал присоединен к рукоятке. Первый пусковой узел выполнен с возможностью наложения циркулярной хирургической скрепки, поступающей из дистального конца манипулятора аппликатора. Второй пусковой узел выполнен с возможностью изгибания указанного дистального конца манипулятора Продольная ось рукоятки расположена с наклоном относительно приводного вала. 10 з.п. ф-лы, 6 ил.
Формула
причем продольная ось (С) рукоятки (12) расположена с наклоном относительно приводного вала (20);
при этом указанный первый пусковой узел (14) содержит пусковое устройство (24), которое наклонено относительно приводного вала (20), причем указанное пусковое устройство (24) проходит от зубчатого колеса (25), которое поджато поджимающим устройством (28) и которое находится в зацеплении посредством ряда шестерен с указанным манипулятором (18) аппликатора, так что сжатие указанного пускового устройства (24) в направлении указанной рукоятки (12) вызывает поворот дистального конца (22) манипулятора (18) аппликатора.
Комментарии