Устройство формирования цветных изображений - RU2535634C2
Код документа: RU2535634C2
Чертежи


























Описание
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству формирования цветных изображений, использующему электрофотографию, и, в частности, к устройству формирования изображений, допускающему формирование электростатического скрытого изображения.
Описание предшествующего уровня техники
Среди электрофотографических устройств формирования цветных изображений известна так называемая поточная система, независимо включающая в себя блоки формирования изображений для соответствующих цветов для быстрой печати. Устройство формирования цветных изображений поточной системы применяет конфигурацию, которая последовательно передает изображения от блоков формирования изображений соответствующих цветов на промежуточную транспортную ленту и вместе передает изображения на носитель записи.
Такое устройство формирования цветных изображений вызывает рассовмещение (отклонение от заданной позиции или отклонение по цвету) из-за механических факторов в блоках формирования изображений соответствующих цветов при наложении изображений. В частности, в конфигурации, независимо включающей в себя лазерные сканирующие устройства (оптические сканирующие устройства) и фоточувствительные барабаны для соответствующих цветов, взаимные расположения между лазерными сканирующими устройствами и фоточувствительными барабанами отличаются между цветами. Соответственно, положения лазерного сканирования на фоточувствительных барабанах нельзя синхронизировать, что вызывает рассовмещение.
Чтобы исправить рассовмещение, в вышеприведенном устройстве формирования цветных изображений выполняется управление коррекцией рассовмещения. В выложенной заявке на патент Японии № H07-234612 порошковые изображения для обнаружения соответствующих цветов переносятся с фоточувствительных барабанов на носитель изображения (промежуточную транспортную ленту), и относительные положения порошковых изображений для обнаружения при сканировании и направления транспортировки обнаруживаются с использованием оптических датчиков, и посредством этого выполняется управление коррекцией рассовмещения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Однако существуют следующие проблемы в обнаружении порошкового изображения для обнаружения с использованием оптического сканирующего устройства в традиционно известном управлении коррекцией рассовмещения. То есть, поскольку порошковое изображение для обнаружения (с плотностью 100%) в управлении коррекцией рассовмещения переносится с фоточувствительного барабана на носитель изображения (ленту), необходимы усилия по очистке барабана и носителя, снижающие удобство в эксплуатации устройства формирования изображений.
Задача изобретения состоит в том, чтобы решить по меньшей мере одну из этих проблем и другую проблему.
Например, задача изобретения состоит в том, чтобы решить проблему при обнаружении традиционного порошкового изображения для обнаружения с помощью оптического датчика и повысить удобство в эксплуатации устройства формирования изображений. Другие проблемы можно понять из всего описания изобретения.
Чтобы решить вышеупомянутые проблемы, другая задача изобретения состоит в том, чтобы предоставить устройство формирования цветных изображений, содержащее блоки формирования изображений для каждого цвета, причем каждый из блоков формирования изображений включает в себя светочувствительный элемент, приводимый во вращение, секцию зарядки для зарядки светочувствительного элемента, секцию излучения света для излучения света, чтобы сформировать электростатическое скрытое изображение на светочувствительном элементе, проявочную секцию для нанесения тонера на электростатическое скрытое изображение и формирования порошкового изображения на светочувствительном элементе, и секцию переноса для переноса порошкового изображения, налипшего на светочувствительном элементе, причем секция зарядки, секция проявления и секция переноса предусмотрены для светочувствительного элемента, при этом устройство формирования цветных изображений включает в себя секцию формирования, которая управляет секцией излучения света, соответствующей каждому цвету и формирующей электростатическое скрытое изображение для коррекции рассовмещения на каждом из светочувствительных элементов для каждого цвета, секцию электропитания для секций зарядки, секции проявления или секции переноса, секцию обнаружения для обнаружения вывода для каждого цвета из секции электропитания, когда электростатическое скрытое изображение для коррекции рассовмещения, сформированное на светочувствительном элементе для каждого цвета, проходит через положение, обращенное к одной из секции зарядки, секции проявления и секции переноса, и секцию управления, которая выполняет управление коррекцией рассовмещения для того, чтобы вернуть условие рассовмещения в исходное условие на основе результата обнаружения из секции обнаружения.
Дополнительная задача изобретения состоит в том, чтобы предоставить устройство формирования цветных изображений, содержащее блоки формирования изображений для каждого цвета, причем каждый из блоков формирования изображений включает в себя светочувствительный элемент, приводимый во вращение, блок обработки, установленный плотно вокруг светочувствительного элемента и воздействующий на светочувствительный элемент, секцию излучения света для выполнения излучения света и формирования электростатического скрытого изображения на светочувствительном элементе, при этом устройство заставляет блок формирования изображений функционировать для формирования порошкового изображения и включает в себя секцию формирования для управления секцией излучения света, соответствующей каждому цвету и формирующей электростатическое скрытое изображение для коррекции рассовмещения на светочувствительном элементе для каждого цвета, секцию электропитания для блока обработки, соответствующего каждому цвету, секцию обнаружения для обнаружения, для каждого цвета, вывода из секции электропитания, когда электростатическое скрытое изображение для коррекции рассовмещения, сформированное на светочувствительном элементе для каждого цвета, проходит через положение, обращенное к блоку обработки, и секцию управления для выполнения управления коррекцией рассовмещения для того, чтобы вернуть условие рассовмещения в исходное условие на основе результата обнаружения из секции обнаружения.
Настоящее изобретение может решить проблемы при обнаружении традиционного порошкового изображения для обнаружения оптическим датчиком и повысить удобство в эксплуатации устройства формирования изображений.
Еще один признак настоящего изобретения станет очевидным из последующего описания примерных вариантов осуществления со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - схема конфигурации поточной системы (системы с 4 барабанами) в устройстве формирования цветных изображений.
Фиг. 2А и 2В - схемы конфигурации высоковольтного источника питания.
Фиг. 3 - схема аппаратной конфигурации печатающей системы.
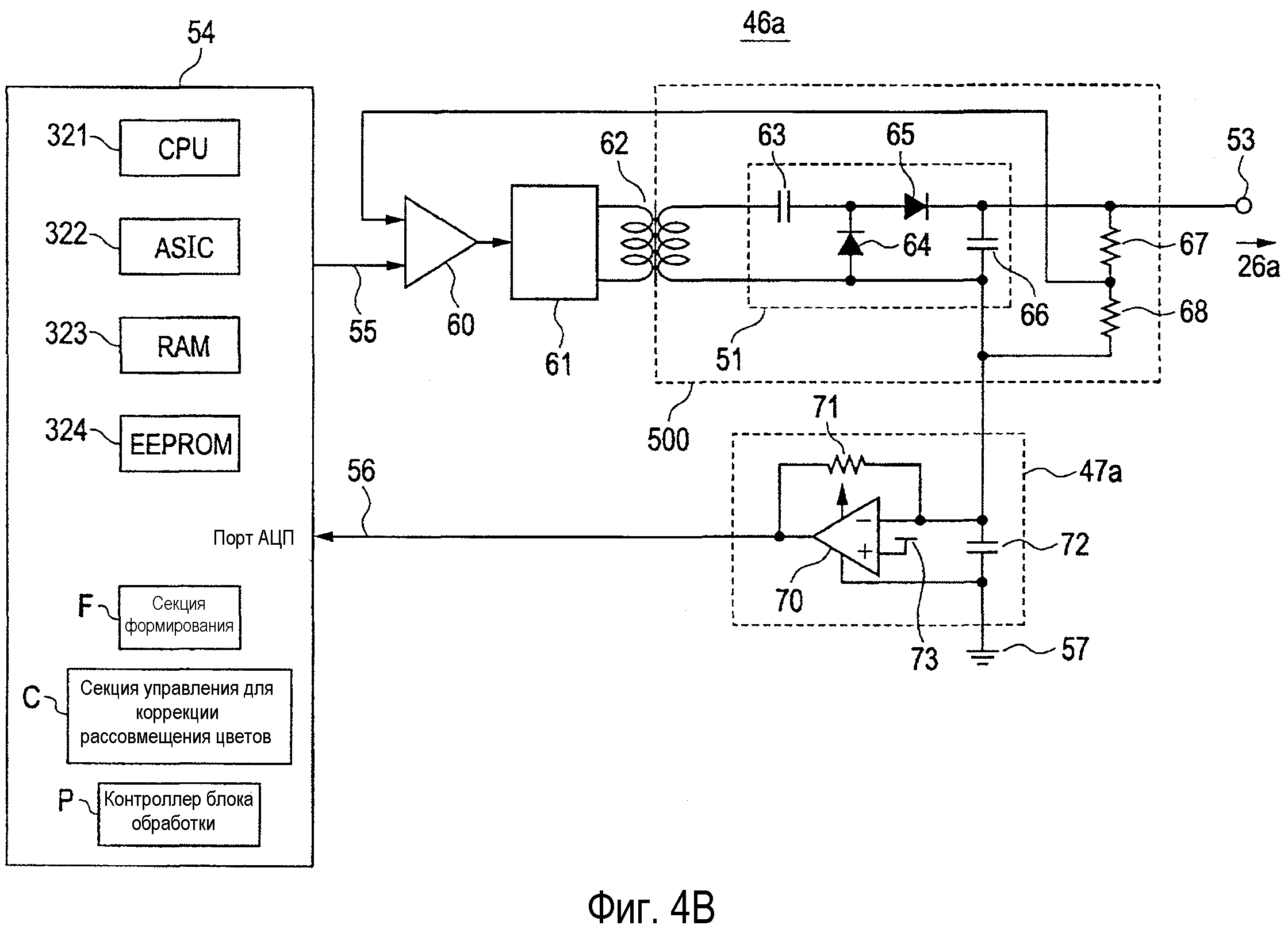
Фиг. 4А - принципиальная схема высоковольтного источника питания.
Фиг. 4B показывает функциональную блок-схему высоковольтной цепи питания.
Фиг. 5 - блок-схема алгоритма, иллюстрирующая обработку для получения опорного значения.
Фиг. 6 - схема, иллюстрирующая пример состояния создания метки для обнаружения рассовмещения (для коррекции рассовмещения), сформированного на промежуточной транспортной ленте.
Фиг. 7 - схема, иллюстрирующая состояние формирования электростатического скрытого изображения для обнаружения рассовмещения (для коррекции рассовмещения) на фоточувствительном барабане.
Фиг. 8 - схема, иллюстрирующая пример результата обнаружения информации о поверхностном потенциале фоточувствительного барабана.
Фиг. 9А - схематическое представление, иллюстрирующее поверхностный потенциал фоточувствительного барабана в случае, где тонер не прилипает к электростатическому скрытому изображению; фиг. 9В - схематическое представление, иллюстрирующее поверхностный потенциал фоточувствительного барабана в случае, где тонер прилипает к электростатическому скрытому изображению.
Фиг. 10 - блок-схема алгоритма управления коррекцией рассовмещения.
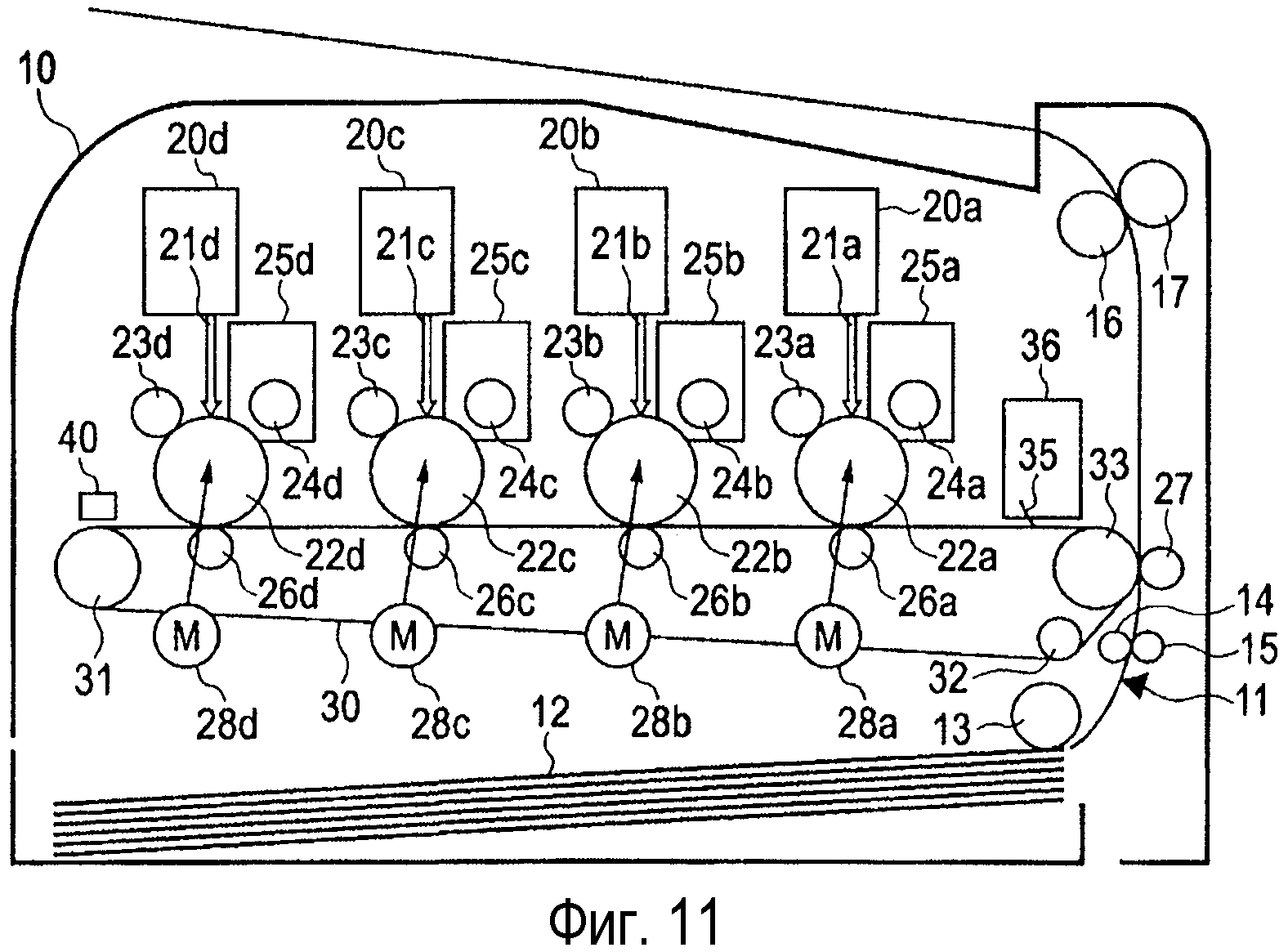
Фиг. 11 - схема конфигурации другой поточной системы (системы с 4 барабанами) в устройстве формирования цветных изображений.
Фиг. 12 - блок-схема алгоритма, иллюстрирующая другую обработку для получения опорного значения.
Фиг. 13 - блок-схема алгоритма, иллюстрирующая другое управление коррекцией рассовмещения.
Фиг. 14А и 14В - схемы, каждая из которых иллюстрирует состояние распределения фаз фоточувствительного барабана, когда дискретизируют данные.
Фиг. 15 - схема для иллюстрации размера листа и ширины пробельной области.
Фиг. 16А - принципиальная схема другого высоковольтного источника питания; фиг. 16В - принципиальная схема другого высоковольтного источника питания, включающего другую цепь контроля тока в качестве третьего варианта осуществления; и фиг. 16С - схема, иллюстрирующая пример результата обнаружения информации о поверхностном потенциале фоточувствительного барабана.
Фиг. 17А и 17В - схемы конфигураций высоковольтного источника питания.
Фиг. 18 - принципиальная схема высоковольтного источника питания.
Фиг. 19 - блок-схема алгоритма, иллюстрирующая другую обработку для получения опорного значения.
Фиг. 20 - схема, иллюстрирующая состояние формирования электростатических скрытых изображений для обнаружения рассовмещения (для коррекции рассовмещения) для соответствующих цветов на фоточувствительном барабане.
Фиг. 21 - блок-схема алгоритма, иллюстрирующая другое управление коррекцией рассовмещения.
Фиг. 22 - схема конфигурации другого высоковольтного источника питания.
Фиг. 23А - блок-схема алгоритма, иллюстрирующая другую обработку для получения опорного значения.
Фиг. 23В - блок-схема алгоритма, иллюстрирующая другую обработку для получения опорного значения.
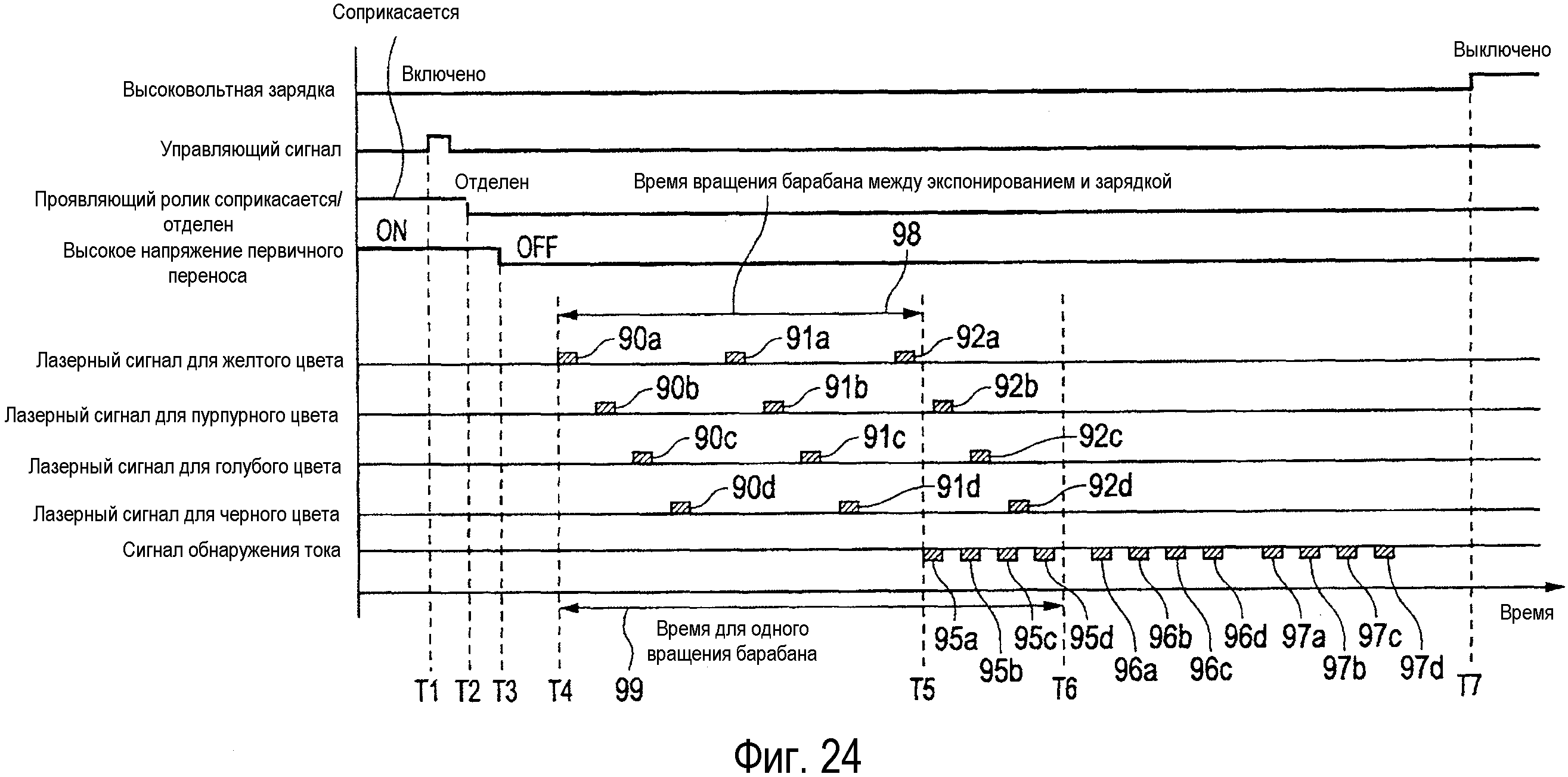
Фиг. 24 - временная диаграмма формирования электростатического скрытого изображения для обнаружения рассовмещения (для коррекции рассовмещения).
Фиг. 25А - блок-схема алгоритма, иллюстрирующая другое управление коррекцией рассовмещения.
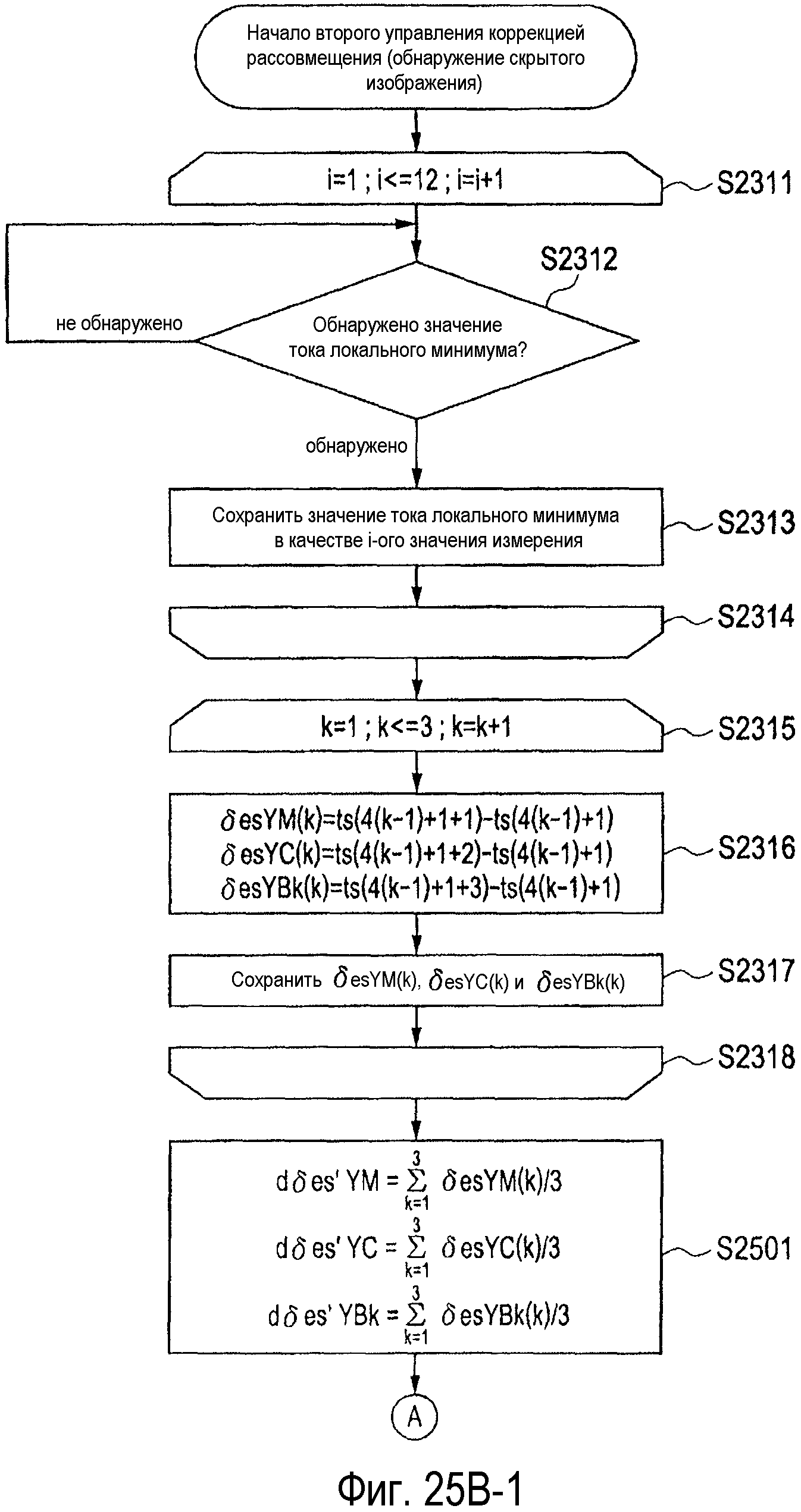
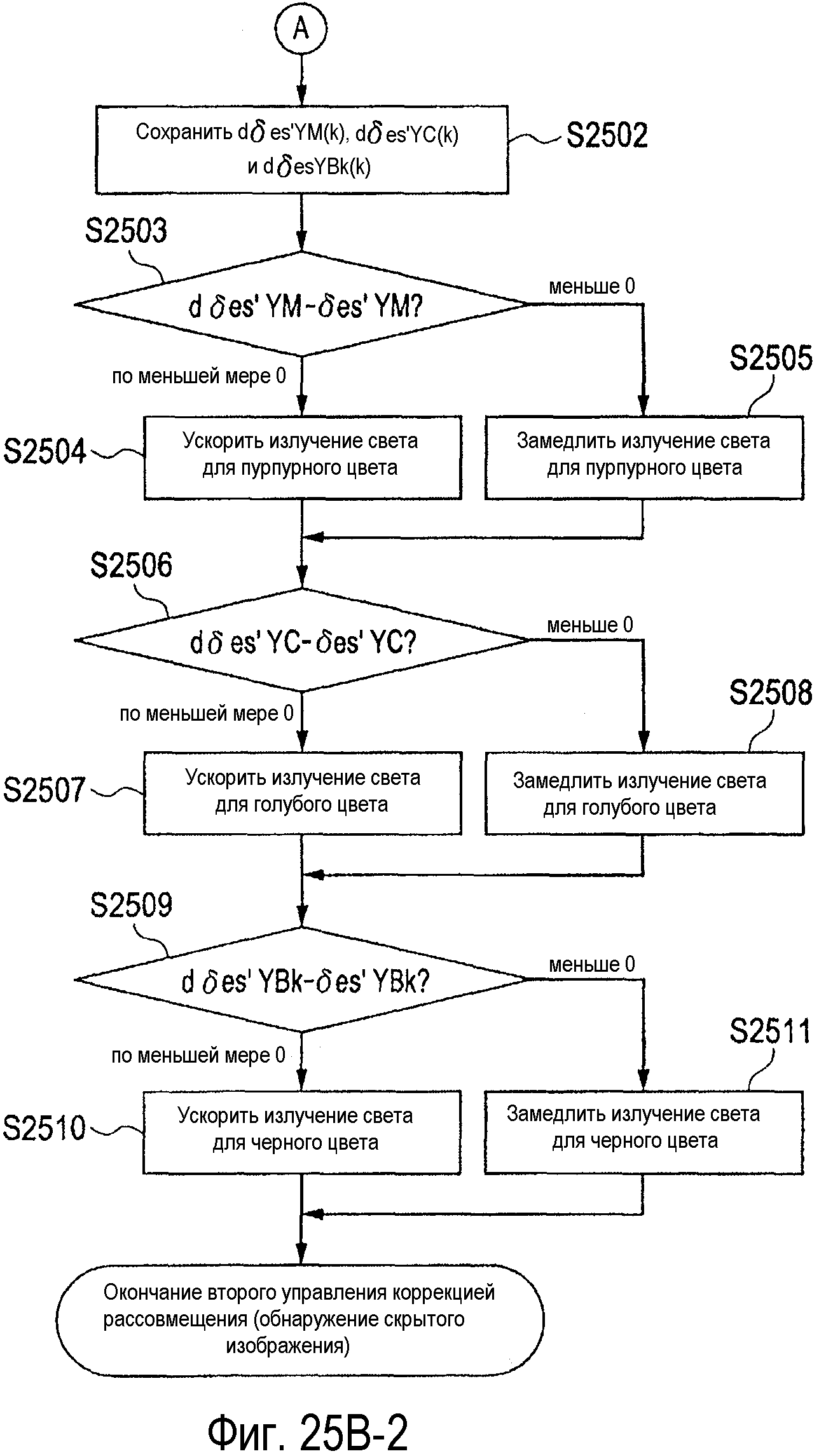
Фиг. 25В состоит из фиг. 25В-1 и 25В-2, которые являются блок-схемами алгоритмов, иллюстрирующими другое управление коррекцией рассовмещения.
Фиг. 26 - блок-схема алгоритма, иллюстрирующая другую обработку для получения опорного значения.
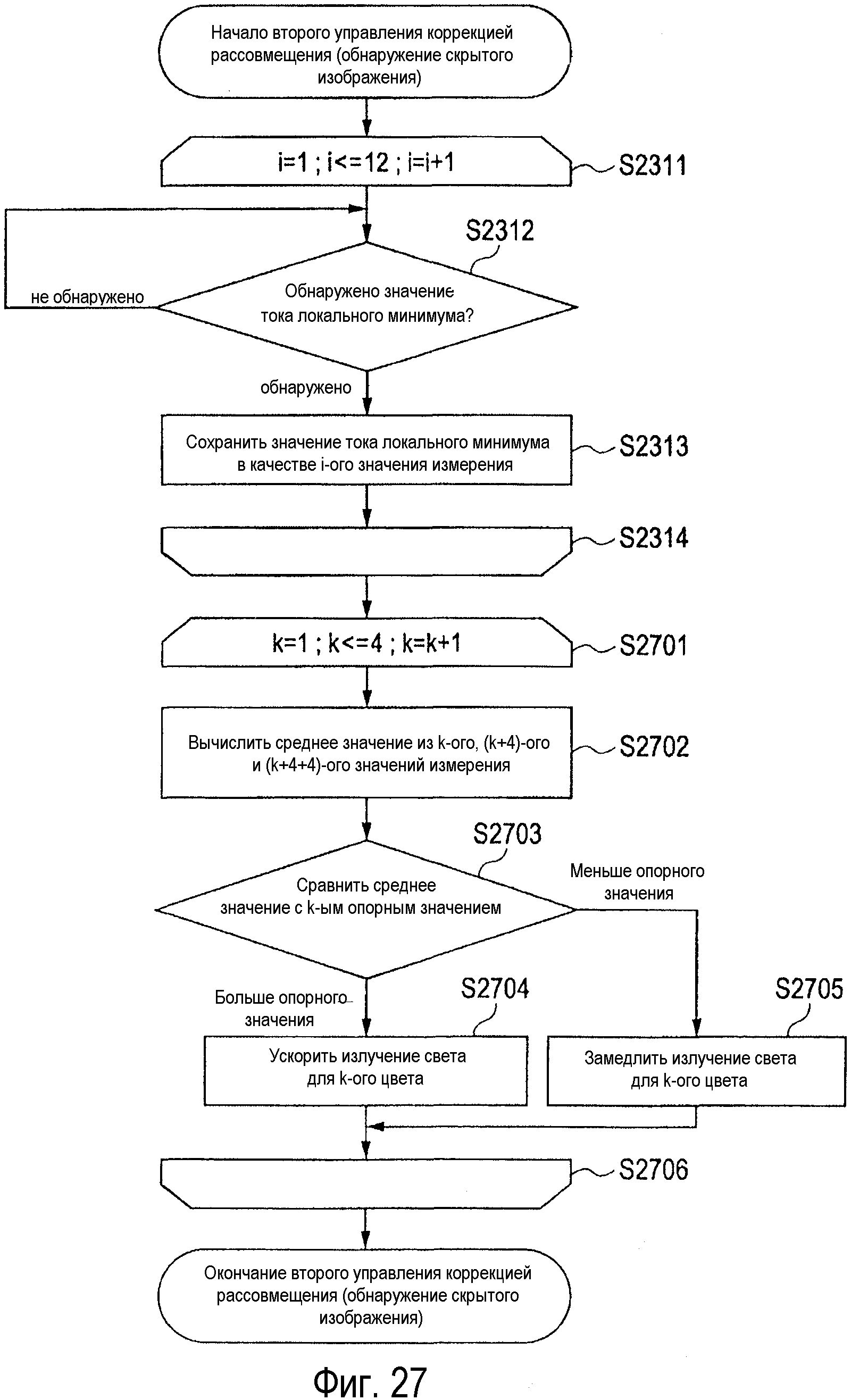
Фиг. 27 - блок-схема алгоритма, иллюстрирующая другое управление коррекцией рассовмещения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Предпочтительные варианты осуществления настоящего изобретения сейчас будут подробно описываться в соответствии с прилагаемыми чертежами.
Ниже варианты осуществления настоящего изобретения будут описываться подробно для примера. Отметим, что конфигурационные элементы в вариантах осуществления описываются для иллюстративной цели. Не планируется ограничивать объем настоящего изобретения только ими.
Вариант 1 осуществления
[Схема конфигурации поточной системы (системы с 4 барабанами) в устройстве формирования цветных изображений]
Фиг. 1 - схема конфигурации поточной системы (системы с 4 барабанами) в устройстве 10 формирования цветных изображений. Передний конец носителя 12 записи, поданный подбирающим роликом 13, обнаруживается датчиком 111 сопротивления. Затем перемещение временно приостанавливается в положении, где передний конец немного прошел через пару протяжных роликов 14 и 15.
Сканирующие блоки с 20а по 20d последовательно облучают фоточувствительные барабаны с 22а по 22d, которые являются приводимыми во вращение светочувствительными элементами, лазерными лучами 21a-21d соответственно. Здесь фоточувствительные барабаны 22а-22d предварительно заряжены с помощью заряжающих роликов 23а-23d. Например, напряжение в -1200 В выводится из каждого заряжающего ролика. Поверхность фоточувствительного барабана заряжается, например, до -700 В. С помощью этого зарядного потенциала образуются электростатические скрытые изображения путем излучения лазерных лучей 21а-21d. Потенциал области, на которой образуются электростатические скрытые изображения, соответственно становится равным, например, -100 В. Проявители 25а-25d и проявляющие цилиндры 24а-24d выдают, например, напряжение в -350 В, наносят тонер на электростатические скрытые изображения на фоточувствительных барабанах 22а-22d, посредством этого формируя порошковые изображения на фоточувствительных барабанах. Первичные передаточные валики 26а-26d выдают, например, положительное напряжение в +1000 В и переносят порошковые изображения на фоточувствительных барабанах 22а-22d на промежуточную транспортную ленту 30 (бесконечную ленту). Отметим, что элементы, непосредственно имеющие отношение к формированию порошкового изображения на заряжающем ролике, проявитель и первичный передаточный валик, включающий сканирующий блок и фоточувствительный барабан, называются блоком формирования изображений. Эти блоки могут называться блоками формирования изображений, за исключением сканирующих блоков 20 в некоторых случаях. Элементы (заряжающие ролики, проявители и первичные передаточные валики), размещенные рядом с фоточувствительным барабаном и действующие на фоточувствительный барабан, называются блоками обработки. Соответственно, многочисленные типы элементов могут соответствовать блокам обработки.
Промежуточная транспортная лента 30 приводится во вращательное движение роликами 31, 32 и 33 и перемещает порошковое изображение в положение вторичного передаточного валика 27. В то же время перемещение носителя 12 записи возобновляется, чтобы добиться синхронизации с перемещенным порошковым изображением в положении вторичного передаточного валика 27. Вторичный передаточный валик 27 переносит порошковое изображение с промежуточной транспортной ленты 30 на материал записи (носитель 12 записи).
Впоследствии порошковое изображение носителя 12 записи нагревается и фиксируется парой валиков 16 и 17 для термического закрепления, а затем носитель 12 записи выводится из устройства. Здесь тонер, не перенесенный с промежуточной транспортной ленты 30 на носитель 12 записи вторичным передаточным валиком 27, собирается в контейнер 36 отработанного тонера с помощью ракеля 35. Работа датчика 40 обнаружения рассовмещения для обнаружения порошкового изображения будет описываться позже. Здесь буквы a, b, c и d обозначений иллюстрируют элементы и блоки желтого, пурпурного, голубого и черного цветов соответственно.
Фиг. 1 иллюстрирует систему, в которой сканирующий блок выполняет излучение света. Однако без ограничения к нему в виде возникновения рассовмещения (отклонения от заданной позиции или отклонения по цвету) к следующим вариантам осуществления может применяться устройство формирования изображений, включающее в себя, например, массив LED в качестве секции излучения света. В нижеследующем описании в качестве примера будет описываться случай, включающий сканирующий блок в качестве секции излучения света.
[Схема конфигурации высоковольтного источника питания]
Далее будет описываться конфигурация высоковольтного источника питания в устройстве формирования изображений из фиг. 1, используя фиг. 2А и 2B. Высоковольтное схемное устройство питания, проиллюстрированное на фиг. 2А, включает в себя высоковольтную цепь 43 питания зарядки, высоковольтные цепи питания 44а-44d проявки, высоковольтные цепи 46а-46d питания первичного переноса и высоковольтную цепь 48 питания вторичного переноса. Высоковольтная цепь 43 питания зарядки подает напряжение на заряжающие ролики 23а-23d для формирования фонового потенциала на поверхностях фоточувствительных барабанов 22а-22d и реализует условие, допускающее формирование электростатического скрытого изображения с помощью испускания лазерного излучения. Высоковольтные цепи 44а-44d питания проявки наносят тонер на электростатические скрытые изображения фоточувствительных барабанов 22а-22d путем подачи напряжения на проявляющие цилиндры 24а-24d, посредством этого формируя порошковые изображения. Высоковольтные цепи 46а-46d питания первичного переноса переносят порошковые изображения фоточувствительных барабанов 22а-22d на промежуточную транспортную ленту 30 путем подачи напряжения на первичные передаточные валики 26а-26d. Высоковольтная цепь 48 питания вторичного переноса переносит порошковое изображение на промежуточной транспортной ленте 30 на носитель 12 записи путем подачи напряжения на вторичный передаточный валик 27.
Высоковольтные цепи 46а-46d питания первичного переноса включают в себя цепи 47а-47d контроля тока соответственно. Причина в том, что производительность переноса порошковых изображений на первичных передаточных валиках 26а-26d меняется в соответствии с величинами тока, текущего в первичных передаточных валиках 26а-26d. Это конфигурируется так, что в соответствии с результатами обнаружения цепей 47а-47d контроля тока напряжения смещения (высокое напряжение), которые нужно подать на первичные передаточные валики 26а-26d, регулируются с тем, чтобы поддерживать производительность переноса постоянной, даже если меняются температура и влажность в устройстве. При первичном переносе регулирование постоянного напряжения выполняется с целью, чтобы величины тока, текущего в первичных передаточных валиках 26а-26d, стали целевыми значениями.
На фиг. 2B, в отличие от фиг. 2А, высоковольтные цепи 43а-43d питания зарядки отдельно предоставляются для заряжающих роликов 23а-23d соответственно. Высоковольтные цепи 43а-43d питания зарядки снабжаются цепями 50а-50d контроля тока соответственно. Поскольку остальная конфигурация идентична таковой на фиг. 2А, ее подробное описание пропускается.
[Аппаратная блок-схема печатающей системы]
Далее типичная аппаратная конфигурация печатающей системы будет описываться с использованием фиг. 3. Сначала будет описываться видеоконтроллер 200. Видеоконтроллер 200 включает в себя CPU 204 для выполнения общего управления видеоконтроллером, секцию 205 энергонезависимой памяти, которая хранит различные управляющие коды, которые нужно выполнять CPU 204, и соответствует ROM, EEPROM и жесткому диску, RAM 206 для функций временного хранения в качестве основного запоминающего устройства и рабочей области CPU 204 и основной интерфейс 207 (называемый основным I/F на схеме), который является секцией ввода и вывода данных печати и управляющих данных от и во внешнее устройство 100, например главный компьютер. Данные печати, принятые от основного интерфейса 207, сохраняются в виде сжатых данных в RAM 206. Видеоконтроллер 200А также включает в себя секцию 208 развертывания данных, разворачивающую (распаковывающую) сжатые данные, секцию 209 управления Прямым доступом к памяти (DMA), интерфейс 210 панели (называемый I/F панели на чертеже) и интерфейс 211 механизма (называемый I/F механизма на чертеже). Развернутые данные изображения сохраняются в RAM 206. Вышеприведенные элементы подключаются к системной шине 212, включающей адресную шину и шину данных, и доступны друг для друга.
Секция 208 развертывания данных разворачивает произвольно сжатые данные, сохраненные в RAM 206, в данные изображения в единицах линий. Секция 209 управления прямым доступом к памяти (DMA) передает данные изображения в RAM 206 в интерфейс 211 механизма в соответствии с командой от CPU 204. Интерфейс 210 панели принимает различные настройки и команды от оператора через панельные секции, предусмотренные на корпусах устройства 10 формирования цветных изображений и принтера 1. Интерфейс 211 механизма является секцией ввода и вывода сигнала из механизма 300 принтера и в него, и передает сигнал данных из выходного буферного регистра, который не проиллюстрирован, и управляет взаимодействием с механизмом 300 принтера.
Далее будет описываться механизм 300 принтера. Вообще говоря, механизм 300 принтера включает в себя блок 54 управления механизмом (в дальнейшем называемый просто блоком 54 управления) и механический блок. Механический блок работает в соответствии с различными командами от блока 54 управления. Сначала будет подробно описываться механический блок. Впоследствии будет подробно описываться блок 54 управления.
Лазерная сканирующая система 331 включает в себя излучающий лазерное излучение элемент, схему управления лазером, двигатель сканера, многоугольное зеркало и привод сканера. Лазерная сканирующая система 331 образует скрытое изображение на фоточувствительном барабане 22 путем экспонирования фоточувствительного барабана 22 лазерным излучением для сканирования в соответствии с данными изображения, переданным от видеоконтроллера 200. Лазерная сканирующая система 331 и позже упоминаемая система 332 формирования изображений соответствуют части, называемой блоком формирования изображений, проиллюстрированным на фиг. 1. Система 332 формирования изображений является центром устройства формирования изображений и формирует на листе (на носителе 12 записи) порошковое изображение на основе скрытого изображения, сформированного на фоточувствительном барабане 22. Система 332 формирования изображений включает в себя блоки обработки (различные типы блоков обработки), воздействующие на фоточувствительный барабан 22, описанный выше. Система 332 формирования изображений включает в себя технологические элементы, например принт-картридж 11, промежуточную транспортную ленту 30 и термофиксатор ("печку"), и высоковольтные цепи питания, вырабатывающие различные типы напряжения смещения (высокого напряжения) для формирования изображений. Система 332 формирования изображений также включает в себя двигатели для приведения в движение элементов, например двигатели для приведения в движение фоточувствительных барабанов 22.
Принт-картридж 11 включает в себя устройство снятия электризации, зарядное устройство 23 (заряжающий ролик 23), проявитель 25 и фоточувствительный барабан 22. Принт-картридж 11 включает в себя энергонезависимую память в виде наклейки. Одно из CPU 321 и ASIC 322 считывает и записывает различные порции информации из памяти в виде наклейки и в нее.
Система 333 подачи и перемещения листов управляет подачей листов и перемещением листа (носителя 12 записи) и включает в себя различные ролики транспортной системы, лоток подачи листов, лоток вывода листов, различные протяжные ролики (например ролик выходного вала).
Сенсорная система 334 включает в себя группу датчиков для сбора информации, которая требуется позже упоминаемым CPU 321 и ASIC 322 для управления лазерной сканирующей системой 331, системой 332 формирования изображений и системой 333 подачи и перемещения листов. Группа датчиков по меньшей мере включает в себя различные датчики, например датчик температуры для термофиксатора и датчик плотности для определения плотности изображения, которые уже известны. Группа датчиков дополнительно включает в себя датчик 40 обнаружения рассовмещения для обнаружения порошкового изображения, которое описано выше. Сенсорная система 334 на чертеже иллюстрируется разделенной на лазерную сканирующую систему 331, систему 332 формирования изображений и систему 333 подачи и перемещения листов. Однако сенсорная система 334 может рассматриваться как включенная в любой механизм.
Далее будет описываться блок 54 управления. CPU 321 использует RAM 323 в качестве основного запоминающего устройства и рабочей области и управляет вышеупомянутым механическим блоком в соответствии с различными управляющими программами, сохраненными в EEPROM 324. Точнее говоря, CPU 321 управляет лазерной сканирующей системой 331 на основе управляющей команды печати и данных изображения, введенных из видеоконтроллера 200 через I/F 211 механизма и I/F 325 механизма. Отметим, что энергонезависимое запоминающее устройство может быть заменено энергозависимым запоминающим устройством с резервным аккумулятором. CPU 321 управляет различными последовательностями печати путем управления системой 332 формирования изображений и системой 333 подачи и перемещения листов. CPU 321 получает информацию, необходимую для управления системой 332 формирования изображений и системой 333 подачи и перемещения листов, путем приведения в действие сенсорной системы 334.
ASIC 322 выполняет управление высоковольтным источником питания, например вышеупомянутое управление двигателями и управление напряжением смещения при проявлении для выполнения различных последовательностей печати в соответствии с командой от CPU 321. Системная шина 326 включает в себя адресную шину и шину данных. Элементы, включенные в блок 54 управления, подключаются к системной шине 326, чтобы быть доступными друг другу. Все или часть функций CPU 321 может выполняться посредством ASIC 322. Наоборот, все или часть функций ASIC 322 может выполняться посредством CPU 321. В вышеприведенном описании, хотя видеоконтроллер 200 и блок 54 управления объясняются как разные компоненты, они выполняются в виде единого блока управления. С другой стороны, они дополнительно сегментируются на несколько блоков управления. Например, часть обработки, выполняемой блоком 54 управления, как описано ниже, может выполняться CPU 204 в видеоконтроллере 200. Наоборот, вся или часть обработки, выполняемой видеоконтроллером 200, может выполняться блоком 54 управления, тогда как вся или часть обработки, выполняемой видеоконтроллером 200 и блоком 54 управления, может выполняться другими блоками управления. То есть, например, в видеоконтроллере 200 функции секции формирования по формированию тонерной метки в качестве коррекции рассовмещения и электростатического скрытого изображения, секции управления для коррекции рассовмещения по указанию сбора данных о рассовмещении или различных вычислений. Также, как объясняется в виде момента T1 и момента T3 на фиг. 24, например, видеоконтроллер 200 может выполнить функцию контроллера блока обработки по управлению работой или настройкой каждого блока обработки, когда обнаруживается электростатическое скрытое изображение. Функции, секция формирования F, секция управления для коррекции рассовмещения C и контроллер блока обработки P показаны на фиг. 4B, эти функции F, C и P могут выполняться различными аппаратными средствами.
[Принципиальная схема высоковольтного источника питания]
Далее с использованием фиг. 4A будет описываться конфигурация схемы высоковольтной цепи 46a питания первичного переноса в высоковольтном источнике питания на фиг. 2А и 2B. Поскольку высоковольтные цепи 46b-46d питания первичного переноса для других цветов имеют такую же конфигурацию схемы, их описание пропускается.
Как проиллюстрировано на фиг. 4A, преобразователь 62 увеличивает напряжение сигнала переменного тока, сформированного возбуждающей схемой 61, чтобы увеличить амплитуду в несколько десятков раз. Выпрямительная схема 51, которая включает в себя диоды 64 и 65 и конденсаторы 63 и 66, выпрямляет и сглаживает увеличенный сигнал переменного тока. Выпрямленный и сглаженный сигнал напряжения выводится в виде напряжения постоянного тока в выходной зажим 53. Компаратор 60 управляет выходным напряжением из возбуждающей схемы 61 так, что напряжение выходного зажима 53, деленное на сопротивления 67 и 68 обнаружения, становится равным значению 55 настройки напряжения, установленному блоком 54 управления. В соответствии с напряжением из выходного зажима 53 ток течет через первичный передаточный валик 26а, фоточувствительный барабан 22а и землю.
Здесь цепь 47а контроля тока вставляется во вторичную схему 500 преобразователя 62 и точку 57 заземления. Поскольку полное сопротивление на входном зажиме операционного усилителя 70 высокое, протекает мало тока. Соответственно, почти весь постоянный ток, текущий в выходной зажим 53 от точки 57 заземления через вторичную схему 500 в преобразователе 62, течет в сопротивление 71. Инвертированный входной зажим операционного усилителя 70 подключается к выходному зажиму через сопротивление 71 (отрицательная обратная связь) и соответственно виртуально заземляется к опорному напряжению 73, подключенному к неинвертированному входному зажиму. Соответственно, напряжение 56 обнаружения, пропорциональное величине тока, текущего через выходной зажим 53, появляется на выходном зажиме операционного усилителя 70. Другими словами, если меняется ток, текущий через выходной зажим 53, то ток, текущий через сопротивление 71, меняется способом, где напряжение 56 обнаружения на выходном зажиме операционного усилителя 70 меняется вместо инвертированного входного зажима операционного усилителя 70. Отметим, что конденсатор 72 предназначен для стабилизации инвертированного входного зажима операционного усилителя 70.
Токовые характеристики первичных передаточных валиков 26а-26d меняются в соответствии с такими факторами, как ухудшение различных элементов и окружающей среды, включая температуру в устройстве. Соответственно, в момент перед тем, как порошковое изображение достигает первичного передаточного валика 26а непосредственно после печати, блок 54 управления измеряет значение 56 обнаружения (напряжение 56 обнаружения) в цепи 47а контроля тока на входном порте АЦП и устанавливает значение 55 настройки напряжения таким, что значение 56 обнаружения (напряжение обнаружения) становится заранее установленным значением. Производительность переноса порошкового изображения соответственно можно поддерживать постоянной, даже если меняются температура окружающей среды и влажность.
[Описание управления коррекцией рассовмещения]
В дальнейшем вышеупомянутое устройство формирования изображений образует метку для обнаружения рассовмещения на промежуточной транспортной ленте 30 и по меньшей мере уменьшает величину рассовмещения. После того как устраняется условие рассовмещения (по меньшей мере уменьшается), измеряется время для достижения электростатическим скрытым изображением 80 положения первичного передаточного валика 26а путем обнаружения изменения тока первичного переноса. Это время устанавливается в качестве опорного значения в управлении коррекцией рассовмещения.
В управлении коррекцией рассовмещения, выполняемой, когда температура в устройстве изменяется из-за постоянной печати, снова обнаруживается изменение тока первичного переноса. Таким образом, измеряется время достижения электростатическим скрытым изображением 80 первичного передаточного валика 26а. Величина рассовмещения отражается в измеренном изменении времени достижения как есть. Соответственно, при печати момент излучения лазерного луча 21а из сканирующего блока 20а регулируется для аннулирования этой величины, посредством этого корректируя рассовмещение. В дальнейшем описание будет приведено подробно. Отметим, что управление условиями формирования изображений, имеющими отношение к коррекции рассовмещения, не ограничивается управлением моментом излучения света. Например, может применяться управление скоростью фоточувствительного барабана, которое позже будет описываться в Варианте 2 осуществления, и механическая регулировка положения отражающих зеркал, включенных в сканирующие блоки 20а-20d.
[Блок-схема алгоритма обработки для получения опорного значения]
Блок-схема алгоритма из фиг. 5 иллюстрирует обработку для получения опорного значения в управлении коррекцией рассовмещения. Сначала блок-схема алгоритма из фиг. 5 выполняется после управления коррекцией рассовмещения (в дальнейшем называемого обычным управлением коррекцией рассовмещения) из-за обнаружения тонерной метки (фиг. 6) в датчике 40 обнаружения рассовмещения. Вместо этого блок-схема алгоритма на фиг. 5 может выполняться только в ответ на обычное управление коррекцией рассовмещения в определенный момент, когда заменяются части, например фоточувствительный барабан 22 и проявляющий цилиндр 24, и выполняется обычное управление коррекцией рассовмещения. Блок-схема алгоритма из фиг. 5 независимо выполняется для каждого цвета. Датчик 40 обнаружения рассовмещения включает в себя светоизлучающий элемент, например светодиод. Датчик 40 обнаружения рассовмещения включает в себя конфигурацию, которая облучает светом порошковое изображение рассовмещения для обнаружения, сформированное на ленте, с помощью светоизлучающего элемента и обнаруживает изменение количества отраженного света в виде положения порошкового изображения (момент обнаружения). Эта методика является общеизвестной в соответствии с множеством документов. Подробное описание этой методики пропускается.
Будет описываться фиг. 5. На этапе S501 блок 54 управления побуждает блок формирования изображений сформировать тонерную метку для обнаружения рассовмещения на промежуточной транспортной ленте 30. Эта тонерная метка для обнаружения рассовмещения является порошковым изображением, используемым для коррекции рассовмещения. Соответственно, тонерная метка может называться порошковым изображением для коррекции рассовмещения. Фиг. 6 иллюстрирует состояние формирования тонерной метки для обнаружения рассовмещения. Благодаря обработке на этапе S501 условие, где величина рассовмещения по меньшей мере уменьшается, может рассматриваться в качестве основного в управлении с помощью электростатического скрытого изображения для последующей коррекции рассовмещения.
Фиг. 6 иллюстрирует шаблоны 400 и 401 для обнаружения величины рассовмещения в направлении перемещения листов (направлении субсканирования). Шаблоны 402 и 403 предназначены для обнаружения величины рассовмещения в направлении основного сканирования, перпендикулярном направлению перемещения листов. В этом примере шаблоны наклонены под углом в 45 градусов. Моменты обнаружения с tsf1 по 4, с tmf1 по 4, с tsr1 по 4 и с tmr1 по 4 являются моментами для обнаружения соответствующих шаблонов. Стрелка иллюстрирует направление движения промежуточной транспортной ленты 30.
Скорость движения промежуточной транспортной ленты 30 равна v мм/с. Y является эталонным цветом. Теоретические расстояния между соответствующими цветами в шаблонах (400 и 401) для направления перемещения листов и шаблоном Y равны dsM мм, dsC мм и dsBk мм. Y рассматривается в качестве эталонного цвета; величины δes рассовмещения для соответствующих цветов в направлении перемещения представлены в следующих Уравнениях с 1 по 3.
δesM=v×{(tsf2-tsf1)+(tsr2-tsr1))/2-dsMУравнение 1
δesC=v×{(tsf3-tsf1)+(tsr3-tsr1)}/2-dsCУравнение 2
δesBk=v×{(tsf4-tsf1)+(tsr4-tsr1)}/2-dsBkУравнение 3
Величины δemf и δemr левого и правого отклонений от заданной позиции для цветов в направлении основного сканирования вычисляются следующим образом.
dmfY=v×(tmf1-tsf1)Уравнение 4
dmfM=v×(tmf2-tsf2)Уравнение 5
dmfC=v×(tmf3-tsf3)Уравнение 6
dmfBk=v×(tmf4-tsf4)Уравнение 7 и
dmrY=v×(tmr1-tsr1)Уравнение 8
dmrM=v×(tmr2-tsr2)Уравнение 9
dmrC=v×(tmr3-tsr3)Уравнение 10
dmrBk=v×(tmr4-tsr4)Уравнение 11 соответственно,
δemfM=dmfM-dmfYУравнение 12
δemfC=dmfC-dmfYУравнение 13
δemfBk=dmfBk-dmfYУравнение 14 и
δemrM=dmrM-dmrYУравнение 15
δemrC=dmrC-dmrYУравнение 16
δemrBk=dmrBk-dmrYУравнение 17
Направление отклонения может определяться в соответствии с тем, является ли результат вычисления положительным или отрицательным. Положение начала записи корректируется в соответствии с δemf. Ширина основного сканирования (увеличение основного сканирования) может корректироваться в соответствии с δemr-δemf. В случае включения ошибки в ширину основного сканирования (увеличение основного сканирования) положение начала записи вычисляется не только с помощью δemf, но также и с помощью величины изменения частоты кадров (тактового импульса формирования изображения), меняющейся в соответствии с коррекцией ширины основного сканирования.
Блок 54 управления изменяет момент испускания лазерного луча из сканирующего блока 20а в качестве условия формирования изображения, чтобы аннулировать вычисленную величину рассовмещения. Например, если величина рассовмещения в направлении субсканирования равна величине -4 линий, то блок 54 управления дает указание видеоконтроллеру 200 опередить момент испускания лазерного излучения на +4 линии.
На фиг. 6 описывается, что тонерная метка для обнаружения рассовмещения образуется на промежуточной транспортной ленте 30. Однако этой конфигурацией не ограничивается, где формировать тонерную метку для обнаружения рассовмещения и обнаруживать метку с помощью оптического датчика (датчика 40 обнаружения рассовмещения). Например, тонерная метка для обнаружения рассовмещения может быть сформирована на фоточувствительном барабане 22; может приниматься результат обнаружения у датчика обнаружения рассовмещения (оптического датчика), выполненного с возможностью обнаружения метки. Вместо этого тонерная метка для обнаружения рассовмещения может быть сформирована на листе (материале записи); может приниматься результат обнаружения у датчика обнаружения рассовмещения (оптического датчика), выполненного с возможностью обнаружения метки. Предполагается формировать тонерную метку для обнаружения рассовмещения на различных носителях для преобразования и носителях тонера.
Описание возвращается к блок-схеме алгоритма из фиг. 5. На этапе S502 блок 54 управления приводит отношение вращательных фаз (отношение угловых положений) между фоточувствительными барабанами 22а-22d к заранее установленному условию с тем, чтобы подавить влияние в случае с изменением скоростей вращения (окружной скорости) фоточувствительных барабанов 22а-22d. Точнее говоря, под управлением блока 54 управления регулируются фазы фоточувствительных барабанов для других цветов относительно фазы фоточувствительного барабана для эталонного цвета. В случае наличия приводного механизма фоточувствительного барабана на валу фоточувствительного барабана отношение фаз приводного механизма регулируется с практической точки зрения. Соответственно, скорость вращения фоточувствительного барабана, когда порошковое изображение, проявленное на каждом фоточувствительном барабане, переносится на промежуточную транспортную ленту 30, становится одним из по существу идентичной тенденции и аналогичной тенденции изменения скорости. Точнее говоря, блок 54 управления выдает команду управления скоростью двигателю для приведения в движение фоточувствительного барабана, который не проиллюстрирован, чтобы привести отношение угловых положений между фоточувствительными барабанами 22а-22d к заранее установленному условию. В случае, где изменение скорости вращения фоточувствительного барабана находится в пределах не принимаемого во внимание размера, обработку на этапе S502 можно пропустить.
На этапе S503 блок 54 управления заставляет сканирующие блоки 20а-20d испускать лазерные лучи на вращающиеся фоточувствительные барабаны в заранее установленной вращательной фазе, формируя электростатические скрытые изображения для коррекции рассовмещения (первые электростатические скрытые изображения для коррекции рассовмещения) на фоточувствительных барабанах.
Фиг. 7 иллюстрирует состояние, где электростатическое скрытое изображение, которое также может называться электростатическим скрытым изображением для коррекции отклонения от заданной позиции, образуется на фоточувствительном барабане с использованием фоточувствительного барабана 22а для желтого цвета. На этом чертеже электростатическое скрытое изображение 80 выводится в как можно более широкой области изображения в направлении сканирования. Ее ширина составляет около пяти линий в направлении перемещения. Ширина в направлении основного сканирования может быть сформирована шириной по меньшей мере в половину максимальной ширины с целью получения удовлетворительного результата обнаружения. Дополнительно ширина электростатического скрытого изображения 80 может увеличиваться до области с шириной, превышающей область листа вне области изображения (область печати изображения на листе) и допускающей формирование электростатического скрытого изображения. В то же время, например, проявляющий цилиндр 24а отделяется от фоточувствительного барабана 22а (разделение). Это позволяет электростатическому скрытому изображению 80 перемещаться в положение первичного передаточного валика 26а без прилипания тонера. По команде блока 54 управления напряжения, выдаваемые из высоковольтных цепей 44а-44d напряжения смещения при проявлении (высоковольтных цепей питания проявки), могут быть установлены в ноль; вместо этого может подаваться напряжение смещения с инвертированной от нормальной полярностью. Это предотвращает прилипание тонера. В направлении вращения фоточувствительного барабана соответственно необходимо отделить проявляющий цилиндр 24а, размещенный раньше первичного передаточного валика 26а, или привести в движение этот цилиндр с тем, чтобы по меньшей мере уменьшить влияние на фоточувствительный барабан, чтобы оно было меньше, чем когда блоком формирования изображений формируется обычное порошковое изображение.
Блок 54 управления запускает таймеры, предусмотренные для соответствующих цветов YMCK, в момент, идентичный или по существу идентичный моменту обработки этапа S503 (этап S504). Блок 54 управления также начинает дискретизацию значения обнаружения в цепи 47а контроля тока. Частота дискретизации в этот момент составляет, например, 10 кГц.
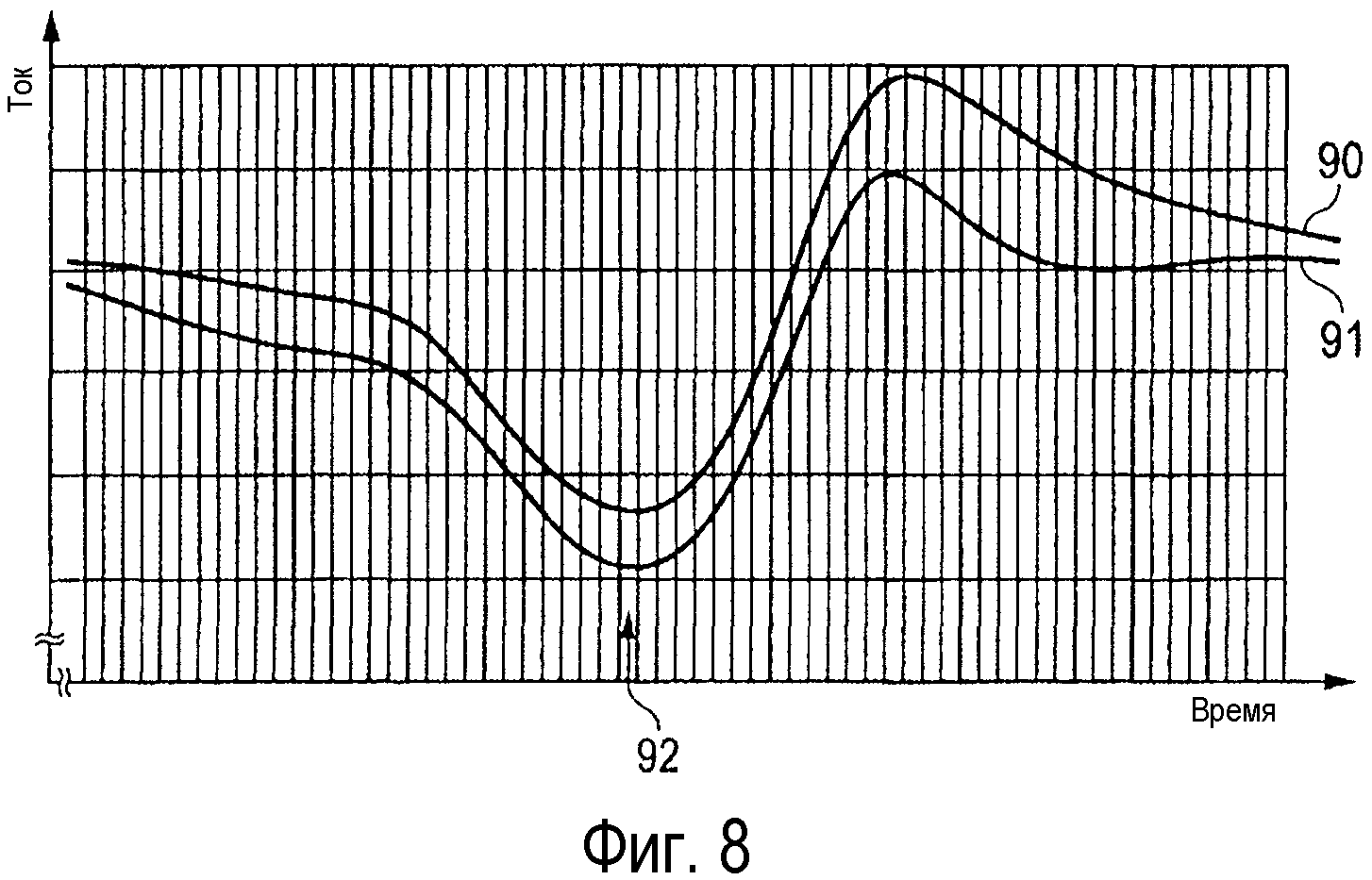
На этапе S505 блок 54 управления измеряет время (значение таймера), в которое значение обнаружения тока первичного переноса становится локальным минимумом, путем обнаружения электростатического скрытого изображения 80 на основе данных, полученных путем дискретизации на этапе S504. В соответствии с этим измерением определяется приход электростатического скрытого изображения 80, сформированного на фоточувствительном барабане, в положение, обращенное к первичному передаточному валику. Фиг. 8 иллюстрирует пример результата обнаружения.
Фиг. 8 иллюстрирует обнаружение выходного значения на поверхностном потенциале светочувствительного элемента (фоточувствительного барабана 22а) из цепи 47а контроля тока, когда электростатическое скрытое изображение 80 достигает первичного передаточного валика 26а в качестве блока обработки. Подробное описание будет сделано в позднее упоминаемых фиг. 9А и 9B. Информация фиг. 8 соответствует поверхностному потенциалу фоточувствительного барабана 22а. Соответственно, эта информация в этом отношении может называться информацией о поверхностном потенциале фоточувствительного барабана 22а. На фиг. 8 ось ординат иллюстрирует обнаруженный ток; ось абсцисс иллюстрирует время. Одно деление оси абсцисс иллюстрирует время, в которое лазерное сканирующее устройство сканирует одну линию. Формы 90 и 91 кривых тока обнаруживаются в разные моменты. Любая из форм 90 и 91 кривых тока иллюстрирует характеристики, в которых электростатическое скрытое изображение 80 достигает первичного передаточного валика 26а, и посредством этого достигается локальный минимум в момент 92, а затем ток возвращается.
Здесь будет описываться причина для сокращения обнаруженного значения тока. Фиг. 9А и 9B - схематические представления, иллюстрирующие поверхностный потенциал фоточувствительного барабана 22а соответственно в случае, где тонер не прилипает к электростатическому скрытому изображению, и в случае, где тонер прилипает к нему. Ось абсцисс иллюстрирует положение поверхности фоточувствительного барабана 22а в направлении перемещения. Область 93 иллюстрирует положение, где образуется электростатическое скрытое изображение 80. Ось ординат иллюстрирует потенциал. Иллюстрируются темновой потенциал VD (например, -700 В) фоточувствительного барабана 22а и световой потенциал VL (например, 100 В). Также иллюстрируется напряжение смещения переноса VT (например, +1000 В) первичного передаточного валика 26а.
В области 93 электростатического скрытого изображения 80 разность 96 потенциалов между первичным передаточным валиком 26а и фоточувствительным барабаном 22а становится меньше разности 95 потенциалов в другой области. Соответственно, когда электростатическое скрытое изображение 80 достигает первичного передаточного валика 26а, уменьшается значение тока, текущего в первичном передаточном валике 26а. Это является причиной для вышеупомянутого обнаружения значения локального минимума на фиг. 8. Поверхностный потенциал фоточувствительного барабана 22а отражается в обнаруженном таким образом значении тока. На фиг. 9А и 9B описание выполнено с использованием примера разности между поверхностным потенциалом фоточувствительного барабана и выходным напряжением из первичного передаточного валика 26а. Что касается изменения величин тока, аналогичное описание можно выполнить между поверхностным потенциалом фоточувствительного барабана и одним из зарядного потенциала и напряжения проявления.
Описание возвращается к блок-схеме алгоритма на фиг. 5. В конечном счете на этапе S506 блок 54 управления сохраняет время (значение таймера), измеренное на этапе S505, в качестве опорного значения в EEPROM 324. Сохраненная здесь информация представляет собой исходное условие, к которому нужно стремиться, когда выполняется управление коррекцией рассовмещения. При управлении коррекцией рассовмещения блок 54 управления выполняет управление для того, чтобы аннулировать отклонение от исходного условия, другими словами, чтобы вернуть условие к исходному условию.
Значение таймера, необходимое на этапе S506, принимает момент формирования электростатического скрытого изображения с помощью сканирующих блоков 20а-20d на этапе S503 в качестве базового (опорного). Принятие момента формирования электростатического скрытого изображения в качестве базового не ограничивается самим моментом формирования электростатического скрытого изображения. Вместо этого, например, может выбираться момент, имеющий отношение к моменту формирования электростатического скрытого изображения, например одна секунда перед формированием электростатического скрытого изображения. EEPROM 324 может быть RAM с резервным аккумулятором. Информация для сохранения может быть чем-то, допускающим идентификацию времени. Например, информация может быть одной из информации о количестве секунд и значением подсчета тактовых импульсов.
[Подробное описание этапа S505]
Здесь будет описываться причина для измерения времени, где обнаруженные формы 90 и 91 сигналов (формы кривых тока) становятся локальными минимумами. Причина в том, что момент, в который электростатическое скрытое изображение 80 достигает первичного передаточного валика 26а, может быть точно измерен даже в случае, где абсолютное значение измеренного тока другое, как и в случае обнаруженных форм 90 и 91 сигналов (форм кривых тока). Причина для выбора формы, например электростатического скрытого изображения 80, проиллюстрированного на фиг. 7, в качестве шаблона для обнаружения (электростатическое скрытое изображение для коррекции рассовмещения) состоит в увеличении изменения значения тока в результате принятия шаблона, широкого в направлении основного сканирования. Дополнительно выбирается ширина в несколько линий в направлении перемещения (направлении субсканирования) фоточувствительного барабана 22. Соответственно, точка локального минимума появляется резко, пока поддерживается значительное изменение значения тока. Таким образом, оптимальная форма электростатического скрытого изображения 80 отличается в соответствии с конфигурацией устройства. Форма не ограничивается формой, включающей ширину в пять линий в направлении перемещения, которая принимается в этом варианте осуществления.
Можно принять результат обнаружения, проиллюстрированный на фиг. 8. Однако, например, ширина в направлении перемещения электростатического скрытого изображения 80 может составлять 20 линий, что шире, чем пять линий, может быть сформирована область точно для результата обнаружения, и может быть обнаружена ее средняя точка. То есть достаточно, чтобы из результата обнаружения можно было определить положение, удовлетворяющее определенному условию (характерное положение), определенному в блок-схеме алгоритма из фиг. 5, когда выполняется позже упоминаемая блок-схема алгоритма из фиг. 10. С помощью такого режима не только вышеупомянутое положение локального минимума, но также и различные характерные положения результатов обнаружения могут применяться к цели определения на этапах S505 в фиг. 5 и 10. Это применение также справедливо для позже упоминаемых фиг. 12 и 13.
В вышеприведенном описании описана конфигурация, что проявляющий цилиндр 24а отделяется от фоточувствительного барабана 22а и выполняется обнаружение без нанесения тонера на электростатическое скрытое изображение 80, когда обнаруживается рассовмещение в соответствии с блок-схемой алгоритма из фиг. 5. Однако конфигурация этим не ограничивается. Рассовмещение можно обнаружить даже в случае нанесения тонера.
Фиг. 9B - схематическое представление, иллюстрирующее разность потенциалов между фоточувствительным барабаном 22а и первичным передаточным валиком 26а в случае, где тонер прилипает к электростатическому скрытому изображению 80. Элементам, идентичным элементам на фиг. 9А, присваиваются одинаковые обозначения, и их описание пропускается. В случае, где тонер прилипает к электростатическому скрытому изображению 80, разность 97 потенциалов между первичным передаточным валиком 26а и фоточувствительным барабаном 22а в области 93 в электростатическом скрытом изображении 80 больше разности 96 потенциалов в случае без тонера. Отличие от разности 95 потенциалов в других областях становится меньше. Однако изменение можно обнаружить в достаточном объеме. Здесь после обнаружения рассовмещения возникает необходимость очистки тонера на фоточувствительном барабане 22 и промежуточной транспортной ленте 30. Однако, если его плотность не высокая, требуется только простая очистка. Проблема практически отсутствует. По сравнению со случаем, где порошковое изображение со 100%-ной плотностью для обнаружения в коррекции рассовмещения переносится на промежуточную транспортную ленту 30, и тонер счищается, очистка может выполняться по меньшей мере за более короткое время.
[Блок-схема алгоритма управления коррекцией рассовмещения]
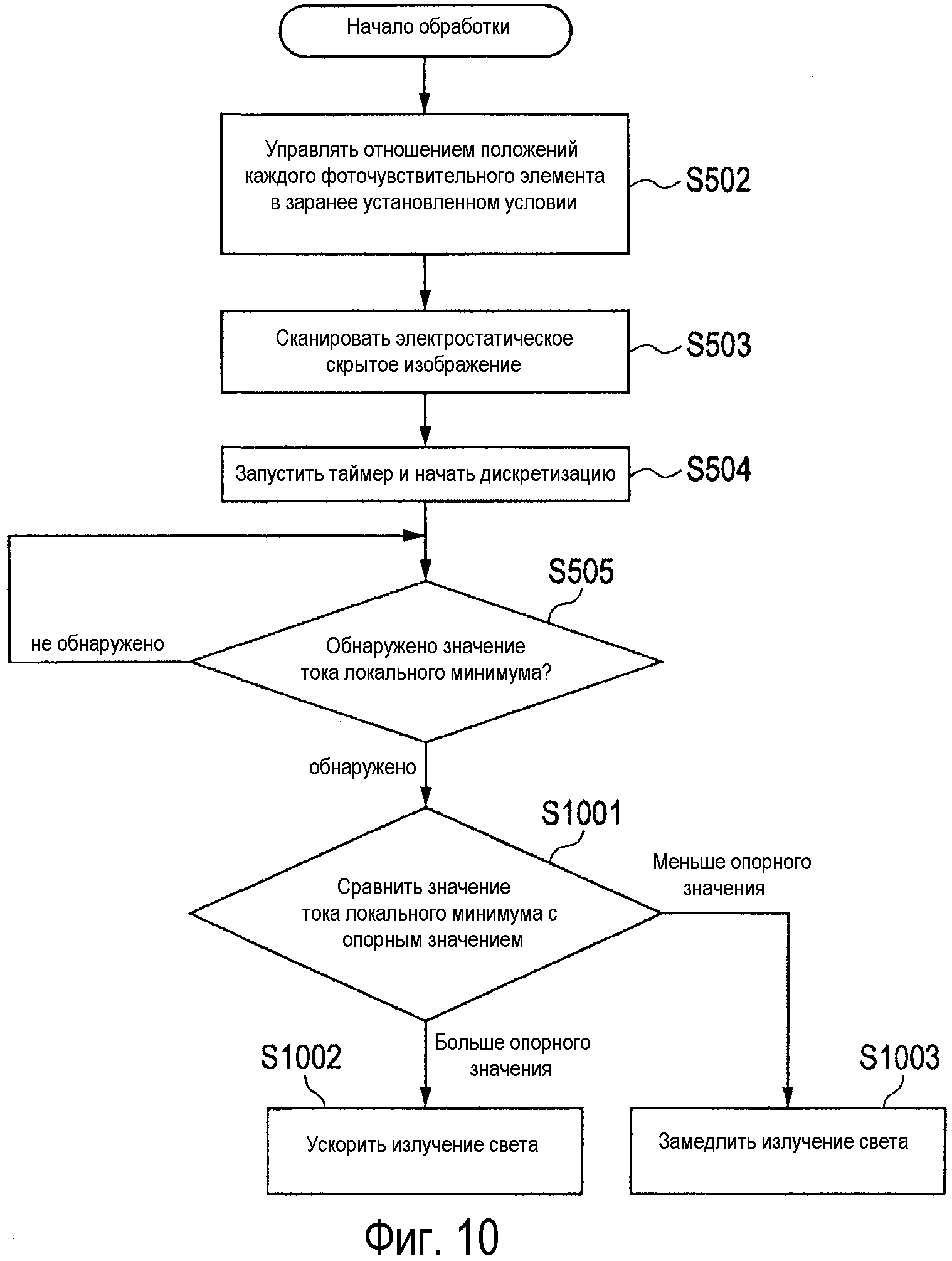
Далее будет описываться управление коррекцией рассовмещения в этом варианте осуществления с использованием блок-схемы алгоритма из фиг. 10. Блок-схема алгоритма из фиг. 10 выполняется отдельно для каждого цвета. Блок-схема алгоритма из фиг. 10 выполняется при заранее установленном условии. Как описано выше, условие включает в себя случай, где температура в устройстве изменилась вследствие непрерывной печати, случай, где команда управления коррекцией рассовмещения из фиг. 10 введена в блок 54 управления с помощью действия пользователя, и случай, где среда в устройстве изменилась в значительной степени. Это описание также справедливо для позже упоминаемых фиг. 13, 21, 25A, 25B-1, 25B-2 и 27.
Сначала на этапах S502-S505 выполняется обработка, идентичная обработке на фиг. 5. В случае, где вал фоточувствительного барабана 22а децентрирован, соответственно изменяется время, необходимое для достижения вышеупомянутым электростатическим скрытым изображением 80 первичного передаточного валика 26а. Также на этапе S503 из фиг. 10, чтобы обнаружить это изменение, электростатическое скрытое изображение 80 образуется в положении, идентичном таковому на этапе S503 из фиг. 5. Идентичное положение (фаза) здесь может быть строго идентичным. Вместо этого идентичное положение может быть по существу или почти идентичным, только будучи в пределах, допускающих повышение точности обнаружения рассовмещения по сравнению со случаем формирования электростатического скрытого изображения 80 в произвольном положении. Здесь электростатические скрытые изображения для коррекции рассовмещения, сформированные на фоточувствительных барабанах на этапах S503 на фиг. 5 и 10, могут отличаться друг от друга как первое и второе электростатические скрытые изображения для коррекции рассовмещения соответственно.
Блок 54 управления сравнивает значение таймера, полученное, когда ток локального минимума обнаружен на этапе S1001, с опорным значением, сохраненным на этапе S506 в блок-схеме алгоритма из фиг. 5. На этапе S1002, если значение таймера больше опорного значения, блок 54 управления корректирует момент испускания лазерного луча в качестве условия формирования изображения, чтобы опередить момент испускания лазерного луча во время печати. Настройка того, насколько блок 54 управления опережает момент испускания лазерного луча, может регулироваться в соответствии с тем, насколько велико измеренное время по сравнению с опорным значением. С другой стороны, если значение таймера, определенное на этапе S1003, меньше опорного значения, то блок 54 управления задерживает момент испускания лазерного луча во время печати. Настройка того, насколько блок 54 управления задерживает момент испускания лазерного луча, может регулироваться в соответствии с тем, насколько мало измеренное время по сравнению с опорным значением. Обработка с коррекцией условия формирования изображения на этапах S1002 и S1003 позволяет вернуть настоящее условие рассовмещения к условию рассовмещения (исходному условию) в качестве опорного.
Описано, что на этапе S1001 в блок-схеме алгоритма на фиг. 10 блок 54 управления сравнивает значение таймера, полученное, когда обнаружен ток локального минимума, с опорным значением, сохраненным на этапе S506. Однако конфигурация этим не ограничивается. С точки зрения поддержания условия рассовмещения в некоторый момент этапы S502-S506 могут выполняться при условии, где возникает произвольное рассовмещение, и сохраненное опорное значение может применяться в качестве цели сравнения на этапе S1001. Это описание также справедливо для позже упоминаемых фиг. 12 и 13.
[Описание полезного результата]
Как описано выше, блок 54 управления выполняет блок-схему алгоритма из фиг. 10. Соответственно, управление коррекцией рассовмещения может быть реализовано, даже если порошковое изображение для обнаружения (с плотностью в 100%) в управлении коррекцией рассовмещения не переносится с фоточувствительного барабана на носитель изображения (ленту). То есть может выполняться управление коррекцией рассовмещения наряду с тем, что удобство в эксплуатации устройства формирования изображений поддерживается на максимально возможном уровне.
Также известен способ, который предварительно измеряет тенденцию изменения величины рассовмещения относительно величины изменения температуры в устройстве, оценивает и вычисляет величину рассовмещения на основе измеренной температуры в устройстве и выполняет управление коррекцией рассовмещения. Этот способ управления коррекцией рассовмещения обладает преимуществом устранения необходимости формирования порошкового изображения для обнаружения на носителе изображения. Способ управления коррекцией рассовмещения, который оценивает и вычисляет величину рассовмещения, может сдержать потребление тонера. Однако в этом способе фактически возникающая величина рассовмещения не обязательно совпадает с оцененным и вычисленным результатом, приводя к недостатку точности. В отличие от этого блок-схема алгоритма из фиг. 10 позволяет сдержать потребление тонера наряду с обеспечением определенной точности в управлении коррекцией рассовмещения.
В отношении управления коррекцией рассовмещения, использующего электростатическое скрытое изображение, например, можно рассмотреть конфигурацию, которая переносит электростатическое скрытое изображение для коррекции рассовмещения на промежуточную транспортную ленту и предоставляет датчик потенциала для обнаружения изображения. Однако в этом случае возникает время ожидания, пока датчик потенциала обнаружит электростатическое скрытое изображение, перенесенное на промежуточную транспортную ленту. В отличие от этого данный вариант осуществления может сократить время ожидания по сравнению с этим и предотвратить снижение удобства в эксплуатации.
Система, которая переносит электростатическое скрытое изображение для коррекции рассовмещения на промежуточную транспортную ленту, должна поддерживать потенциал электростатического скрытого изображения для коррекции рассовмещения на промежуточной транспортной ленте до тех пор, пока не обнаружится этот потенциал. Соответственно, необходимо применять материал с высоким сопротивлением (по меньшей мере e13 Ом-см) для ленты и увеличивать постоянную времени τ, чтобы не устранить мгновенно заряды на ленте (например, на 0,1 с). Однако промежуточная транспортная лента с большой постоянной времени τ обладает недостатком ухудшения изображения, например повторные изображения и отметки разряда вследствие заряженной ленты. В отличие от этого данный вариант осуществления может уменьшить постоянную времени τ у промежуточной транспортной ленты и остановить ухудшение изображения вследствие зарядки.
Вариант 2 осуществления
Фиг. 11 - схема конфигурации устройства формирования изображений, отличающегося по конфигурации от Варианта 1 осуществления. Элементам, идентичным элементам Варианта 1 осуществления, присваиваются идентичные обозначения. Их описание пропускается. Отличие от устройства формирования изображений, проиллюстрированного на фиг. 1, состоит в том, что в конфигурации на фиг. 11 проявляющие цилиндры 24а-24d всегда отделены от фоточувствительных барабанов 22а-22d и не воздействуют на фоточувствительный барабан. Во время печати высоковольтные цепи 44а-44d питания проявки прикладывают переменные напряжения смещения к проявляющим цилиндрам 24а-24d соответственно. Это приложение заставляет тонер совершать возвратно-поступательное движение между фоточувствительными барабанами 22а-22d и проявляющими цилиндрами 24а-24d, посредством этого прилепляя тонер к электростатическому скрытому изображению. Эта конфигурация препятствует прилипанию тонера к электростатическому скрытому изображению 80 на фоточувствительном барабане 22 только путем остановки высоковольтных цепей 44а-44d питания проявки.
В конфигурации на фиг. 11 фоточувствительные барабаны 22а-22d приводятся в движение независимыми приводными источниками 28а-28d соответственно, чтобы задать скорости вращения. Таким образом, время, проходящее от излучения лазерных лучей 21а-21d до достижения электростатическим скрытым изображением 80 первичных передаточных валиков 26а-26d, регулируется постоянно путем изменения соответствующих скоростей вращения у фоточувствительных барабанов 22а-22d, чтобы аннулировать величину рассовмещения обнаруженного направления перемещения. Например, в случае увеличения скорости вращения фоточувствительного барабана увеличивается разделение между электростатическими скрытыми изображениями на фоточувствительном барабане в направлении субсканирования. Наоборот, без изменения скорости вращения (скорости движения) промежуточной транспортной ленты 30 сокращается разделение между положениями переноса порошковых изображений в направлении субсканирования. Соответственно, расширение и сжатие изображения, сформированного на промежуточной транспортной ленте 30 в направлении субсканирования, практически не представляет никакой проблемы.
Этот вариант осуществления предполагает конфигурацию, которая не обнаруживает фазы фоточувствительных барабанов 22а-22d. Однако в случае, где вал фоточувствительного барабана 22а децентрирован и этим нельзя пренебречь, фактический результат измерения времени, в которое вышеупомянутое электростатическое скрытое изображение 80 достигает первичного передаточного валика 26а, также изменяется соответственно. Таким образом, в этом варианте осуществления реализуется множество моментов измерения, и рассовмещение регулируется на основе их среднего значения. Само собой разумеется, что обработка в позже упоминаемых блок-схемах алгоритмов также может применяться к случаю использования устройства формирования изображений, проиллюстрированного на фиг. 1.
Фиг. 12 - блок-схема алгоритма, иллюстрирующая обработку для получения опорного значения в Варианте 2 осуществления. Блок-схема алгоритма из фиг. 12 выполняется отдельно для каждого цвета.
Сначала обработка на этапах S1201-S1205 идентична таковой на этапах S501-S505 на фиг. 5. Их подробное описание пропускается.
На этапе S1206 блок 54 управления выполняет управление повторением обработки на этапах S1203-S1205 до повторения n раз измерения значения таймера для обнаружения локального минимума, чтобы аннулировать влияния вследствие децентрирования фоточувствительных барабанов 22а-22d. Отметим, что n - целое число и равно по меньшей мере двум. В случае, где электростатическое скрытое изображение для коррекции рассовмещения в течение n раз короче вращения фоточувствительного барабана, например, соответствующее половине вращения фоточувствительного барабана, формирование электростатического скрытого изображения для коррекции рассовмещения в заранее установленной вращательной фазе на этапе S1203 особенно эффективно.
На этапе S1206 блок 54 управления определяет, что n раз измерения закончились. Блок 54 управления затем вычисляет среднее значение от значений таймера (времени), полученных с помощью n измерений, на этапе S1207. На этапе S1208 блок 54 управления сохраняет данные (показательное время) о среднем значении в качестве показательного значения (опорного значения) в EEPROM 324. Сохраненная здесь информация представляет собой исходное условие, к которому нужно стремиться, когда выполняется управление коррекцией рассовмещения. При управлении коррекцией рассовмещения блок 54 управления выполняет управление для того, чтобы аннулировать отклонение от исходного условия, другими словами, чтобы вернуть условие к исходному условию. Различные способы вычисления, например простое среднее и среднее взвешенное, могут предполагаться в качестве способа получения среднего. В плане аннулирования составляющей цикла вращения фоточувствительного барабана, например децентрирования фоточувствительного барабана, способ не ограничивается вычислением среднего значения. Способ может быть, например, одним из простого суммирования и взвешенного суммирования, только если операция предназначена для аннулирования составляющей цикла вращения фоточувствительного барабана. Аннулирование здесь не означает полного аннулирования. Аннулирование здесь по меньшей мере подавляет влияние из-за составляющей цикла вращения фоточувствительного барабана. Если возможно полное аннулирование, само собой разумеется полное аннулирование влияния. Как описано выше, на этапе S1208 опорное значение вычисляется на основе множества полученных данных. Соответственно, точность можно повысить по сравнению с вычислением опорного значения на основе одиночных данных.
[Блок-схема алгоритма управления коррекцией рассовмещения]
Далее будет описываться блок-схема алгоритма из фиг. 13. Обработке, идентичной таковой на фиг. 12, присваиваются идентичные обозначения этапов. Блок-схема алгоритма из фиг. 13 отдельно выполняется для каждого цвета.
Сначала обработка на этапах S1202-S1205 из фиг. 13 аналогична соответствующей обработке на фиг. 12. Блок 54 управления повторяет обработку на этапах S1203-S1205 до повторения n раз измерения значения таймера для обнаружения локального минимума, чтобы аннулировать влияния в случае, где вращающиеся валы фоточувствительных барабанов 22а-22d децентрированы.
На этапе S1301 блок 54 управления определяет, что n раз измерения закончились. На этапе S1302 блок 54 управления вычисляет среднее значение от значений таймера, полученных с помощью n измерений. На этапе S1303 блок 54 управления считывает опорное значение, сохраненное на этапе S1208 на фиг. 12, из запоминающего устройства (EEPROM 324). Блок 54 управления сравнивает вычисленное среднее значение с показательным значением (опорным значением). Отметим, что в плане аннулирования составляющей цикла вращения фоточувствительного барабана оно не ограничивается средним значением, как описано на этапах S1207 и S1208.
В случае, где среднее значение больше опорного значения, блок 54 управления на этапе S1304 увеличивает скорость вращения фоточувствительного барабана в качестве условия формирования изображения, то есть ускоряет двигатель на количество времени печати. С другой стороны в случае, где среднее значение меньше опорного значения, блок 54 управления на этапе S1305 уменьшает скорость вращения фоточувствительного барабана в качестве условия формирования изображения, то есть замедляет двигатель на количество времени печати, тем самым корректируя рассовмещение. Таким образом, обработка на этапах S1304 и S1305 позволяет вернуть настоящее условие рассовмещения к условию рассовмещения (исходному условию) в качестве опорного. На этапах S1304 и S1305 на фиг. 13 обработка на одном из этапов S1002 и S1003, проиллюстрированных на блок-схеме алгоритма из фиг. 10, может выполняться в качестве коррекции условия формирования изображения.
[Распределение фазы фоточувствительного барабана]
В случае выполнения обработки по сканированию электростатического скрытого изображения на этапе S1203 на фиг. 12 и 13 в пробельной области между страницами количество n определения на этапе S1206 на фиг. 12 и этапе S1301 на фиг. 13 определяется размером каждого элемента в устройстве формирования изображений. Точнее говоря, количество определяется размером листа, окружной длиной фоточувствительного барабана и шириной пробельной области изображения в направлении движения (направлении вращения фоточувствительного барабана).
Например, график на фиг. 14А иллюстрирует, как фаза фоточувствительного барабана в центре пробельной области изменяется в случае, где размером листа является А4 (297 мм), ширина пробельной области изображения в направлении движения равна 64,0 мм, и окружная длина барабана равна 75,4 мм. Дополнительно фиг. 14B иллюстрирует пример, где размер листа, ширина пробельной области и окружная длина барабана являются другими значениями. Описание на фиг. 14А и 14B аналогичным образом справедливо для каждого цвета.
Графики на фиг. 14А и 14B иллюстрируют, в какой фазе барабана соответственно образуется электростатическое скрытое изображение, когда этап S1203 на фиг. 12 и 13 выполняется в центре каждой пробельной области. Обе фиг. 14А и 14B иллюстрируют, что фазовое соотношение фоточувствительного барабана усредняется/распределяется при множестве раз формирования электростатического скрытого изображения в каждой пробельной области на этапе S1203 на фиг. 12 и 13.
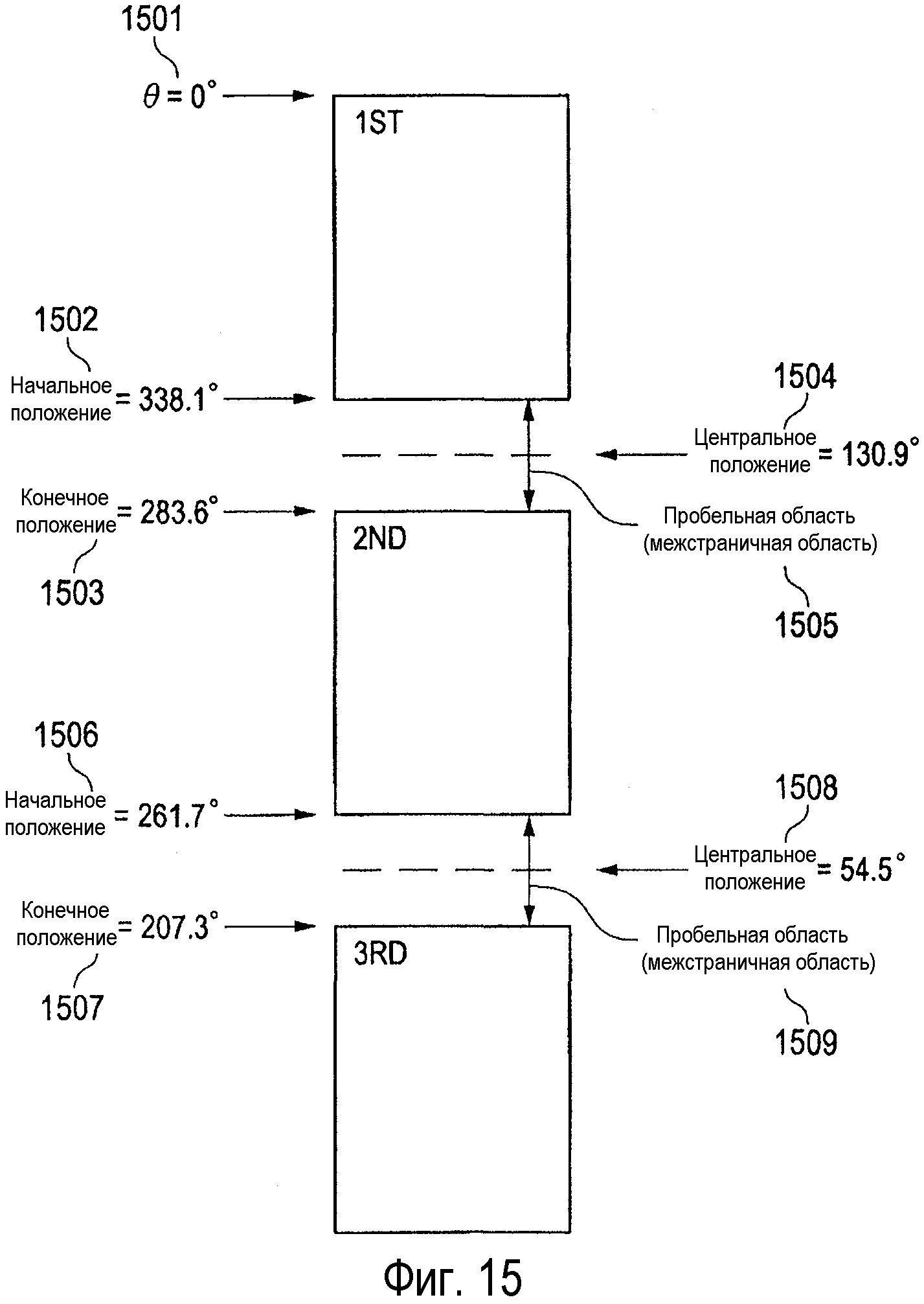
Здесь фиг. 15 иллюстрирует, какие элементы указывают размер листа и ширину пробельной области. Фиг. 15 иллюстрирует соответствие между положением первичного переноса, когда порошковое изображение временно переносится на промежуточную транспортную ленту, и фазой фоточувствительного барабана, когда выполняется экспонирование соответствующего порошкового изображения. Пробельная область может быть задана в виде области на фоточувствительном барабане, например области на фоточувствительном барабане, отличной от области (эффективной области изображения), допускающей формирование электростатического скрытого изображения при формировании изображения, и области между страницами (межстраничная область). Пробельная область может быть задана в виде периода времени (времени), в течение которого сканирующий блок 20 не выполняет лазерное излучение для формирования изображения для каждой страницы.
На фиг. 15 соответствующие фазы начального положения 1502 (1506) пробельной области 1505 (1509), центрального 1504 (1508) и конечного положения 1503 (1507) определяются по фазе фоточувствительного барабана, соответствующей положению 1501, и размеру листа. Как описано выше, фаза каждого фоточувствительного барабана является фазой фоточувствительного барабана, когда экспонируется порошковое изображение, если порошковое изображение первоначально переносится.
Фиг. 15 иллюстрирует фазу 1501 в виде нуля. Можно выбрать другое значение, что не представляет никакой проблемы. То есть, даже если фаза 1501 не равна нулю, только момент появления сдвигается относительно того, какое имеется количество пробельных областей, в которых изменяется фаза. То есть нет большой разницы в плане того, что фаза фоточувствительного барабана распределяется, когда электростатическое скрытое изображение образуется на этапе S1203 на фиг. 12 и 13.
Как описано выше, блок 54 управления выполняет блок-схемы алгоритмов из фиг. 12 и 13. Соответственно, в дополнение к полезным результатам, аналогичным результатам в Варианте 1 осуществления, может быть реализовано очень точное управление коррекцией рассовмещения с использованием среднего значения. Более того, управление коррекцией рассовмещения может выполняться независимо от фазы фоточувствительного барабана, когда образуется электростатическое скрытое изображение для коррекции рассовмещения. Соответственно, начальный момент управления коррекцией рассовмещения может быть еще гибче в показателях момента запуска.
Вариант 3 осуществления
В этом Варианте осуществления описано, что значение тока, текущего через первичный передаточный валик 26а, фоточувствительный барабан 22а и землю, обнаруживается в соответствии с выходным напряжением выходного зажима 53 в качестве выходного значения, имеющего отношение к поверхностному потенциалу фоточувствительного барабана 22а. Однако этим он не ограничивается. Заряжающие ролики 23а-23d и проявляющие цилиндры 24а-24d предоставляются вокруг фоточувствительных барабанов 22а-22d в дополнение к первичным передаточным валикам 26а-26d. Любой из Вариантов 1 и 2 осуществления может применяться к заряжающим роликам 23а-23d и проявляющим цилиндрам 24а-24d (проявляющим роликам). То есть, как описано выше, может обнаруживаться выходное значение, имеющее отношение к поверхностным потенциалам фоточувствительных барабанов 22а-22d, когда электростатические скрытые изображения 80, сформированные на фоточувствительных барабанах 22а-22d, достигают заряжающих роликов 23а-23d и проявляющих цилиндров 24а-24d (проявляющих роликов) в качестве блока обработки.
Ниже в качестве примера будет описываться случай обнаружения значения тока, текущего через заряжающий ролик 23 и фоточувствительный барабан 22, в качестве выходного значения, имеющего отношение к поверхностному потенциалу фоточувствительного барабана 22. В этом случае могут быть предоставлены высоковольтные цепи 43а-43d питания зарядки (фиг. 2B), подключенные к соответствующим заряжающим роликам. Схемы, аналогичные высоковольтным цепям питания, проиллюстрированным на фиг. 4A, могут быть предоставлены для соответствующих высоковольтных цепей питания зарядки. Выходной зажим 53 может подключаться к соответствующим заряжающим роликам 23.
Фиг. 16А иллюстрирует высоковольтную цепь питания зарядки 43а в этом случае. Имеется отличие от фиг. 4A в том, что выходной зажим 53 подключается к заряжающему ролику 23а. Имеется другое отличие в том, что диоды 1601 и 1602, чьи катод и анод противоположны таковым у диодов 64 и 65, формируют высоковольтную цепь питания. Причина в том, что в устройстве формирования изображений этого варианта осуществления напряжение смещения первичного переноса является положительным, но напряжение смещения зарядки является отрицательным. Отметим, что высоковольтные цепи 43b-43d питания зарядки для других цветов имеют конфигурации схем, идентичные конфигурации, проиллюстрированной на фиг. 16А. Соответственно, их подробное описание пропускается, как и в случае высоковольтной цепи питания первичного переноса.
В блок-схемах алгоритмов из фиг. 5, 10, 12 и 13 обработка выполняется в результате деятельности высоковольтных цепей 43а-43d питания зарядки (не проиллюстрированы) вместо высоковольтных цепей 46а-46d питания первичного переноса. Отметим, что целевое значение тока, заданное для напряжения 56 обнаружения, устанавливается подходящим образом с учетом характеристик заряжающего ролика 23 и отношения с другими элементами.
Когда задействуют цепи 50а-50d контроля тока в высоковольтных цепях 43а-43d питания зарядки и отметки скрытого изображения (электростатические скрытые изображения 80), сформированные на соответствующих фоточувствительных барабанах, проходят через участок контакта между фоточувствительным барабаном и промежуточной транспортной лентой 30, первичные передаточные валики 26а-26d можно отделить от ленты. Вместо этого без разделения высоковольтные выводы первичных передаточных валиков 26а-26d можно отключить (ноль). Причина в том, что участок темнового потенциала VD (например, -700 В) на фоточувствительном барабане заряжается положительно больше участка светового потенциала VL (например, -100 В) из-за положительных зарядов, поступающих от первичного передаточного валика. То есть ширина контраста между темновым потенциалом VD и световым потенциалом VL становится меньше из-за положительной зарядки, описанной выше. В отличие от этого, если ее избежать, то можно сохранить ширину контраста между темновым потенциалом VD и световым потенциалом VL, и можно поддерживать широкий диапазон изменения тока обнаружения, как есть.
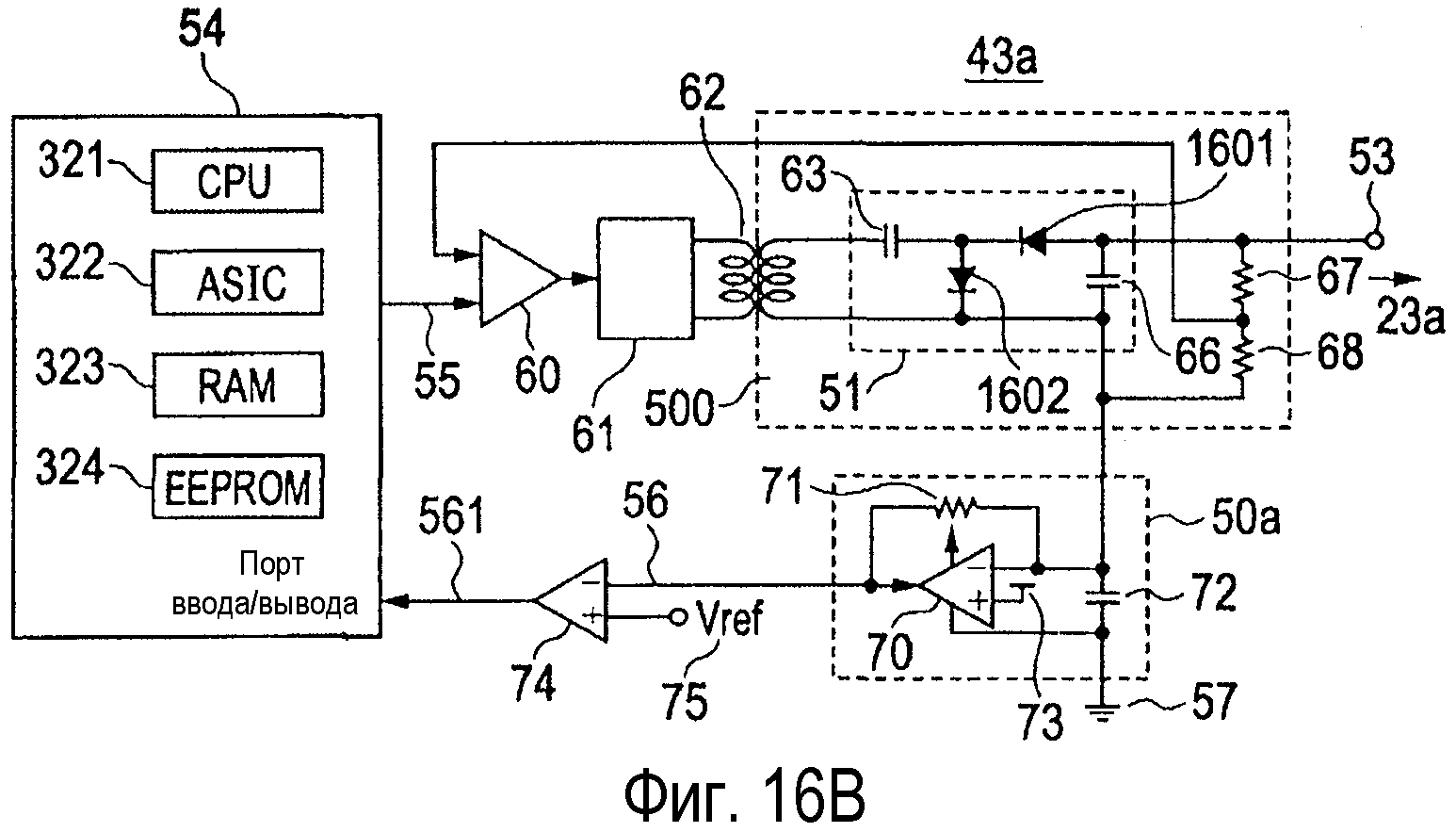
Фиг. 16B иллюстрирует другую высоковольтную цепь 43а питания зарядки. Отличие от фиг. 16А состоит в том, что напряжение 56 обнаружения, представляющее величину тока обнаружения, вводится во входной зажим (инвертированный входной зажим) компаратора 74. Пороговая величина Vref 75 вводится в положительный входной зажим компаратора 74. В случае, где входное напряжение инвертированного входного зажима опускается ниже пороговой величины, выход становится Hi (положительным), и двоичное значение 561 напряжения (напряжение, равное Hi) вводится в блок 54 управления. Пороговая величина Vref 75 устанавливается между значением локального минимума напряжения 561 обнаружения, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к блоку обработки, и значением напряжения 561 обнаружения перед проходом. Подъем и падение напряжения 561 обнаружения обнаруживаются с помощью однократного обнаружения электростатического скрытого изображения. Блок 54 управления рассматривает, например, среднюю точку между подъемом и падением напряжения 561 обнаружения в качестве точек обнаружения. Блок 54 управления может обнаруживать только одно из подъема и падения напряжения 561 обнаружения.
В Вариантах 1 и 2 осуществления описано, что в случае обнаружения, что вывод высоковольтной цепи питания удовлетворяет заранее установленному условию, заранее установленное условие является напряжением 56 обнаружения, становящимся локальным минимумом ниже некоторого значения. Однако заранее установленное условие может быть всем, что представляет, что сформированное на фоточувствительном барабане электростатическое скрытое изображение 80 прошло через положение, обращенное к блоку обработки. Например, как проиллюстрировано на фиг. 16B, заранее установленное условие может быть тем фактом, что напряжение 561 обнаружения опускается ниже пороговой величины. Это уже описано в подробном описании этапа S505 в Варианте 1 осуществления с использованием фиг. 8. Соответственно, в вышеупомянутых и позже упоминаемых блок-схемах алгоритмов различные случаи могут предполагаться в качестве условия обнаружения электростатического скрытого изображения 80.
В дополнение к зарядке и переносу также учитывается проявление. В отношении проявления блок-схемы алгоритмов из фиг. 5, 10, 12 и 13 могут выполняться путем эксплуатации высоковольтных цепей 44а-44d питания проявки (включающих цепь контроля тока). Целевое значение тока в этом случае такое же, как и в случае высоковольтных цепей 43а-43d питания зарядки. Это значение может устанавливаться подходящим образом с учетом характеристик проявляющего цилиндра 24 и отношения с другими элементами.
В случае эксплуатации высоковольтных цепей 44а-44d питания проявки выходное напряжение можно установить выше VL, чтобы тонер не прилипал к фоточувствительному барабану. Например, в случае, когда VL является отрицательным напряжением -100 В, выходы из высоковольтных цепей 44а-44d питания проявки могут быть заданы отрицательными и с напряжением в -50 В, чье абсолютное значение меньше VL. Вместо этого схемы, аналогичные высоковольтным цепям питания, проиллюстрированным на фиг. 4A, могут добавляться к высоковольтным цепям 44а-44d питания проявки; в случае, где VL является отрицательным напряжением в -100 В, может выводиться инвертированное напряжение (инвертированное напряжение смещения).
Как описано выше, в соответствии с Вариантом 3 осуществления электростатическое скрытое изображение для коррекции рассовмещения может обнаруживаться с использованием заряжающего ролика 23 и проявляющего цилиндра 24. Это позволяет проявить следующие полезные результаты в дополнение к полезным результатам, аналогичным таковым в Вариантах 1 и 2 осуществления. То есть в случае использования первичного передаточного валика 26 лента помещается между первичным передаточным валиком 26 и фоточувствительным барабаном 22. В отличие от этого, в случае использования заряжающего ролика 23 и проявляющего цилиндра обнаружение поверхностного потенциала фоточувствительного барабана может выполняться в ситуациях без такого размещения.
Вариант 4 осуществления
Высоковольтные цепи питания в каждом из вышеприведенных Вариантов осуществления с 1 по 3 снабжаются цепью 47 контроля тока отдельно для каждого блока обработки. Однако конфигурация не ограничивается этим режимом. Фиг. 17А и 17-B иллюстрируют другой пример высоковольтного источника питания. Конфигурация, проиллюстрированная на фиг. 17А, включает в себя высоковольтные цепи 146а-146d питания первичного переноса, предоставленные отдельно для первичных передаточных валиков 26а-26d для соответствующих цветов, и цепь 147 контроля тока, общую для первичных передаточных валиков 26а-26d для соответствующих цветов. По сравнению с фиг. 17А на фиг. 17B высоковольтная цепь 46 питания первичного переноса совместно предоставляется множеству первичных передаточных валиков 26а-26d. На обеих фиг. 17А и 17B элементам, идентичным таковым на фиг. 2А и 2B, присваиваются идентичные обозначения. Их подробное описание пропускается.
[Принципиальная схема высоковольтного источника питания]
Конфигурации схем высоковольтных цепей 146а-146d питания первичного переноса и цепи 147 контроля тока на фиг. 17А будут описываться с использованием фиг. 18. Элементам, идентичным элементам на фиг. 4А, присваиваются идентичные обозначения. Их описание пропускается. На фиг. 18 блок 54 управления управляет возбуждающими схемами 61а-61d на основе значений 55а-55d настройки, установленных для компаратора 60а-60d, и выводит нужное напряжение на выводы 53а-53d соответственно. Токи, выведенные из высоковольтных цепей 146а-146d питания первичного переноса, текут по цепи 147 контроля тока через первичные передаточные валики 26а-26d, фоточувствительные барабаны 22а-22d и точку 57 заземления. Эта точка также идентична фиг. 4A. Напряжение, пропорциональное значению, на которое наложены токи из выходных зажимов 53а-53d, появляется в напряжении 56 обнаружения.
Также на фиг. 18, как и в случае с фиг. 4A, инвертированный входной зажим операционного усилителя 70 виртуально заземляется к опорному напряжению 73, посредством этого являясь постоянным напряжением. Соответственно, имеется небольшая вероятность того, что напряжение инвертированного входного зажима операционного усилителя 70 меняется из-за работы высоковольтных цепей питания первичного переноса для других цветов, и это изменение влияет на работу высоковольтных цепей питания первичного переноса для других цветов. Другими словами, высоковольтные цепи 146а-146d питания первичного переноса не влияют друг на друга и работают как и в случае высоковольтной цепи 46 питания первичного переноса на фиг. 4A.
С другой стороны, подробности высоковольтной цепи 46 питания первичного переноса и цепи 47 контроля тока, проиллюстрированные на фиг. 17B, аналогичны таковым у высоковольтной цепи 46а питания первичного переноса и цепи 47а контроля тока, проиллюстрированных на фиг. 2А и 2B. Их подробное описание также идентично описанию на фиг. 2А и 2B.
Фиг. 17А и 17B отличаются друг от друга только в том, что в них включается одиночный источник тока или множество источников. Обнаружение тока проводится в соответствии с аналогичным механизмом. Соответственно, в нижеследующем обнаружении тока будет сделано описание, применяющее в качестве примера высоковольтный источник питания на фиг. 17А.
[Описание управления коррекцией рассовмещения]
Далее будет описываться обработка того, что цепь контроля тока, общая для высоковольтных источников питания первичного переноса (блока обработки), обнаруживает электростатические скрытые изображения 80а-80d и выполняет управление коррекцией рассовмещения с использованием конфигурации, проиллюстрированной на фиг. 17А, 17B и 18.
[Блок-схема алгоритма обработки для получения опорного значения]
Фиг. 19 - блок-схема алгоритма обработки для получения опорного значения при управлении коррекцией рассовмещения. Обработка на первых этапах S501 и S502 такая же, как проиллюстрирована на фиг. 5.
Далее на этапах с S1901 по S1904 выполняется обработка в цикле для n=1 до 4, и образуется электростатическое скрытое изображение для коррекции рассовмещения. При условии, что сформированное здесь электростатическое скрытое изображение является первым электростатическим скрытым изображением для управления коррекцией рассовмещения, электростатическое скрытое изображение, которое нужно сформировать в позже упоминаемой блок-схеме алгоритма из фиг. 21, можно отличить от него как второе электростатическое скрытое изображение для коррекции рассовмещения. Фиг. 20 иллюстрирует состояние, где электростатические скрытые изображения 80а-80d для коррекции рассовмещения образуются на фоточувствительных барабанах 22а-22d непосредственно после завершения обработки в цикле.
Сначала на этапе S1902 в обработке в цикле для n=1 блок 54 управления побуждает сканирующий блок 20а для желтого цвета выпустить лазерный луч и сформировать электростатическое скрытое изображение 80а для коррекции рассовмещения на фоточувствительном барабане 22а. В то же время блок 54 управления перемещает проявляющий цилиндр 24а, чтобы отделить его от фоточувствительного барабана 22а. Как описано на этапе S503, выходное напряжение из высоковольтной цепи 44а питания (высоковольтная цепь питания проявки) может быть установлено в ноль. Напряжение смещения с полярностью, инвертированной к нормальной, может применяться к выходному напряжению. Также на этапе S1902 проявляющим цилиндром 24а, размещенным раньше первичного передаточного валика 26а, управляют для отделения или уменьшения его воздействия на фоточувствительный барабан по сравнению со случаем формирования обычного порошкового изображения блоком формирования изображений. Эти мероприятия продолжаются, пока не завершается блок-схема алгоритма.
Впоследствии на этапе S1903 блок 54 управления выполняет ожидающую обработку в течение некоторого времени. Эта обработка предназначена для предотвращения перекрытия друг с другом результата обнаружения электростатического скрытого изображения, сформированного для соответствующих цветов. Даже если возникает максимальное рассовмещение, допускаемое в устройстве формирования изображений, время ожидания устанавливается так, чтобы не перекрывать друг с другом электростатические скрытые изображения. Время для ожидающей обработки может быть меньше времени для одного вращения фоточувствительного барабана.
В дальнейшем, аналогичным образом блок 54 управления образует электростатическое скрытое изображение 80b в обработке в цикле для n=2, образует электростатическое скрытое изображение 80c в обработке в цикле для n=3 и образует электростатическое скрытое изображение 80d в обработке в цикле для n=4 на фоточувствительном барабане, как и в случае для n=1. В этом варианте осуществления электростатические скрытые изображения 80а-80d образуются на фоточувствительных барабанах 22а-22d соответственно в последовательности желтого цвета для n=1, пурпурного для n=2, голубого для n=3 и черного для n=4. Последовательность этим не ограничивается. Само собой разумеется, что можно выбрать другую последовательность, отличную от этой, и можно провести выполнение.
Описание возвращается к блок-схеме алгоритма на фиг. 19. На следующем этапе S1905 блок 54 управления начинает дискретизацию значения обнаружения в цепи 47 контроля тока. Частота дискретизации в этот момент может составлять, например, около 10 кГц.
Впоследствии, на этапе S1906 блок 54 управления определяет, становится ли значение обнаружения тока первичного переноса локальным минимумом, путем обнаружения электростатического скрытого изображения 80 на основе данных, полученных путем дискретизации. Тот факт, что значение обнаружения указывает значение локального минимума, означает, что электростатическое скрытое изображение 80а, сформированное первым, достигает положения первичного передаточного валика 26а. Другими словами, это обнаружение на этапе S1906 делает возможным обнаружение электростатического скрытого изображения 80, сформированного на фоточувствительном барабане, проходящего через положение, обращенное к первичному передаточному валику в качестве блока обработки. Ток обнаружения в цепи 47 контроля тока здесь является значением, в котором накладываются токи, текущие в первичные передаточные валики 26а-26d через сопротивление 71. Когда на этапе S1906 обнаруживается значение тока локального минимума, на этапе S1907 запускается таймер.
Впоследствии на этапах S1908-S1911 блок 54 управления выполняет обработку в цикле для n=1 по 3. При обработке в цикле блок 54 управления измеряет временную разность между моментом, в который значение обнаружения эталонного цвета становится локальным минимумом, и моментами, в которые значения обнаружения у измерительных цветов (Y, M и C) становятся локальным минимумом. На этапе S1909 измеряются моменты (значения таймера), в которые значения обнаружения становятся локальным минимумом благодаря электростатическим скрытым изображениям 80b-80d со второго (n=1) по четвертый (n=3) цвет. На этапе S1910 измеренное время сохраняется в качестве n-го опорного значения в EEPROM 324. Сохраненная здесь информация указывает исходное условие, к которому нужно стремиться, когда выполняется управление коррекцией рассовмещения. При управлении коррекцией рассовмещения блок 54 управления выполняет управление для того, чтобы аннулировать отклонение от исходного условия, другими словами, чтобы вернуть условие к исходному условию. Сохраненное здесь опорное значение для n=1 представляет разность момента, в который достигает электростатическое скрытое изображение для желтого цвета, и момента, в который достигает изображение для пурпурного цвета. Значение для n=2 представляет разность момента, в который достигает электростатическое скрытое изображение для желтого цвета, и момента, в который достигает изображение для голубого цвета. Значение для n=3 представляет разность момента, в который достигает электростатическое скрытое изображение для желтого цвета, и момента, в который достигает изображение для черного цвета.
[Блок-схема алгоритма управления коррекцией рассовмещения]
Фиг. 21 - блок-схема алгоритма, иллюстрирующая управление коррекцией рассовмещения в этом варианте осуществления. Обработка на этапах S502-S1907 аналогична таковой на фиг. 19. Соответственно, их описание пропускается.
Далее на этапах S2101-S2106 блок 54 управления выполняет обработку в цикле для n=1 по 3. На этапе S2102 блок 54 управления устанавливает n=1 и измеряет время (значение таймера), в которое результат обнаружения эталонного цвета становится локальным минимумом, а затем значение обнаружения становится локальным минимумом, как и в случае с этапом S1909 на фиг. 19. На этапе S2103 блок 54 управления сравнивает время, измеренное на этапе S2102, с опорным значением, соответствующим значению n, сохраненному на этапе S1910 на фиг. 19.
Если измеренное время больше сохраненного опорного значения, то блок 54 управления на этапе S2104 выполняет коррекцию для того, чтобы опередить момент испускания лазерного луча для пурпурного цвета во время печати. Настройка того, насколько блок 54 управления опережает момент испускания лазерного луча, может регулироваться в соответствии с тем, насколько велико измеренное время по сравнению с опорным значением. С другой стороны, если определенное значение таймера меньше опорного значения, то блок 54 управления на этапе S2105 задерживает момент испускания лазерного луча для пурпурного цвета во время печати. Настройка того, насколько блок 54 управления задерживает момент испускания лазерного луча, может регулироваться в соответствии с тем, насколько мало измеренное время по сравнению с опорным значением. Обработка на этапах S2104 и S2105 позволяет вернуть настоящее условие рассовмещения к условию рассовмещения (исходному условию) в качестве опорного. В дальнейшем аналогичным образом блок 54 управления устанавливает n=2 и выполняет обработку на этапах S2101-S2106 для голубого цвета; блок 54 управления устанавливает n=3 и выполняет обработку на этапах S2101-S2106 для черного цвета.
В вышеприведенном описании выбирается пример, в котором блоком обработки для обнаружения тока являются первичные передаточные валики 26а-26d. Однако заряжающий ролик и проявляющий цилиндр могут выбираться в качестве блока обработки для обнаружения тока.
В случае заряжающего ролика может предоставляться цепь контроля тока, общая для одной или множества высоковольтных цепей питания зарядки, и блок-схемы алгоритмов фиг. 19 и 21 могут выполняться с использованием этой цепи контроля тока. Это соответствует высоковольтной цепи питания зарядки, которая будет описываться позже в Варианте 5 осуществления. Действия проявляющих цилиндров и передаточных валиков в случае, где используется цепь контроля тока в высоковольтной цепи питания зарядки, будут подробно описываться в Варианте 5 осуществления.
В случае проявляющих цилиндров может предоставляться цепь контроля тока, общая для одной или множества высоковольтных цепей питания проявки, и блок-схемы алгоритмов из фиг. 19 и 21 могут выполняться с помощью цепи контроля тока. Способ того, как управлять выходным напряжением от одной или множества высоковольтных цепей питания проявки, такой же, как описан в Варианте 3 осуществления.
Как описано выше, в этом варианте осуществления блок 54 управления выполняет ожидающую обработку на этапе S1903, чтобы не перекрывать друг с другом соответствующие моменты обнаружения электростатического скрытого изображения. Соответственно, цепь 147 контроля тока, общая для высоковольтных цепей 46а-46d питания первичного переноса, может использоваться в качестве блока обработки электростатического скрытого изображения. Это использование позволяет упростить конфигурацию, имеющую отношение к цепи контроля тока.
Этот вариант осуществления не может измерять и корректировать отклонение от заданной позиции для желтого цвета, выбранного в качестве эталонного. Однако можно корректировать относительные величины рассовмещений других цветов (измерительных цветов/цветов обнаружения) в случае выбора желтого цвета в качестве эталонного. Таким образом, абсолютные отклонения от заданной позиции у соответствующих цветов почти не поддаются отличению друг от друга. Соответственно, можно получить достаточное качество печати, как и в случае Вариантов осуществления. В этом варианте осуществления желтый выбирается в качестве эталонного цвета. Однако само собой разумеется выполнение вышеприведенных Вариантов осуществления наряду с выбором другого цвета в качестве эталонного цвета.
Обработка, аналогичная таковой в блок-схемах алгоритмов фиг. 5 и 10 и фиг. 12 и 13, проиллюстрированная в Вариантах осуществления с 1 по 3, может выполняться с использованием общей цепи 147 контроля тока, проиллюстрированной в Варианте 4 осуществления. В этом случае пропускается обработка на этапе S1906 на фиг. 19, и обработка в цикле на этапах S1908-S1911 выполняется для n=1 по 4. Впоследствии в блок-схеме алгоритма из фиг. 21 можно пропустить обработку на этапе S1906, и обработка на этапах S2101-S2106 может выполняться для n=1 по 4. В случае использования высоковольтной цепи питания зарядки и высоковольтной цепи питания проявки вместо высоковольтной цепи питания первичного переноса вышеприведенная обработка может выполняться аналогичным образом.
Вариант 5 осуществления
В вышеупомянутых Вариантах осуществления описание выполнено из условия, что используется цепь контроля тока, общая для множества блоков обработки, и электростатические скрытые изображения 80а-80d для коррекции образуются в определенных положениях (фазах) на фоточувствительных барабанах 22а-22d. Дополнительно в случае использования цепи контроля тока, общей для блоков обработки для множества цветов, электростатическое скрытое изображение для коррекции рассовмещения может формироваться независимо от положения (фазы) фоточувствительного барабана, посредством этого позволяя коррекцию рассовмещения, как описано в Варианте 2 осуществления. Ниже будет описываться режим этой коррекции.
[Схема конфигурации высоковольтного источника питания]
Фиг. 22 иллюстрирует конфигурацию высоковольтного источника питания в Варианте 5 осуществления. Конфигурационным элементам, идентичным таковым на фиг. 2А, 2B, 17А и 17В, присваиваются идентичные обозначения ссылок. Имеется отличие в том, что высоковольтная цепь 43 питания зарядки снабжается цепью 50 контроля тока, общей для заряжающих роликов 23а-23d в качестве блоков обработки. То есть в этом варианте осуществления будет описываться обработка по обнаружению значения тока, текущего через заряжающие ролики 23 и фоточувствительные барабаны 22. Подробности конфигураций схем высоковольтной цепи 43 питания зарядки и цепи 50 контроля тока такие же, как проиллюстрированы на фиг. 16А-16С (43а и 50а). Здесь их подробное описание пропускается.
Также фиг. 22 иллюстрирует только случай, где высоковольтная цепь питания зарядки является общей для заряжающих роликов 23а-23d. Однако конфигурация этим не ограничивается. Как и в случае высоковольтных цепей 146а-146d питания первичного переноса, проиллюстрированных на фиг. 17А, может применяться случай отдельного обеспечения заряжающих роликов 23а-23d соответствующими высоковольтными цепями питания зарядки. Причина в том, что разница состоит только в том, предоставляется один или множество источников тока, и обнаружение тока управляется аналогичным образом.
[Блок-схема алгоритма обработки для получения опорного значения]
Блок-схемы алгоритмов, иллюстрирующие обработку для получения опорного значения при управлении коррекцией рассовмещения в этом варианте осуществления, будут описываться с использованием фиг. 23А, 23B и 24. Сначала обработка на этапе S501, исходно выполняемая в блок-схеме алгоритма фиг. 23А, является такой же, как проиллюстрировано на фиг. 5. Перед обработкой на этапе S1907 на фиг. 23А подготовка к формированию электростатического скрытого изображения для коррекции рассовмещения на фоточувствительном барабане выполняется в моменты T1-T3 на фиг. 24. Состояние до момента T1 на фиг. 24 представляет собой состояние непосредственно после того, как выполнено управление коррекцией рассовмещения на этапе S501. Состояние "непосредственно после" здесь указывает состояние, в котором управление коррекцией рассовмещения на этапе S501 отражается почти как есть.
Сначала блок 54 управления выводит управляющий сигнал для приведения в движение кулачков для отделения проявляющих цилиндров 24а-24d в момент T1. В момент T2 выполняется операция от состояния, где проявляющие цилиндры 24а-24d соприкасаются с фоточувствительными барабанами 22а-22d соответственно, к разделенному состоянию. Блок 54 управления управляет высоким напряжением первичного переноса от включенного состояния до выключенного состояния в момент T3. Что касается выключенного состояния высокого напряжения первичного переноса, если говорить точнее, блок 54 управления устанавливает значение 55 настройки в ноль в схеме на фиг. 4A. В схеме на фиг. 18 блок 54 управления устанавливает значения 55а-55d настройки в ноль. Как проиллюстрировано в вышеприведенном Варианте осуществления, вместо отделения проявляющего цилиндра 24 в момент T1, выводимые напряжения из высоковольтных цепей 44а-44d питания проявки могут быть установлены в ноль. Вместо этого может подаваться напряжение с инвертированной от нормальной полярностью. Что касается первичных передаточных валиков 26а-26d, вместо отключения высокого напряжения первичного переноса можно отделить ролики.
Описание возвращается к фиг. 23А. Блок 54 управления запускает таймер на этапе S1907 после момента T3 и начинает дискретизацию на этапе S1905. Обработка этого такая же, как проиллюстрировано в вышеприведенном Варианте осуществления.
Далее блок 54 управления выполняет обработку в цикле для n=1 до 12 на этапах с S2301 по 2304. На этапе S2302 в обработке в цикле блок 54 управления последовательно выводит в общей сложности двенадцать сигналов, которые являются лазерными сигналами 90a-90d, 91a-91d и 92a-92d. В соответствии с выведенным здесь сигналом сканирующие блоки 20а-20d выполняют излучение света. Проявляющие цилиндры 24а-24d и первичные передаточные валики 26а-26d, размещенные раньше заряжающих роликов 23а-23d, в которых обнаруживается электростатическое скрытое изображение, задействуют для их отделения или по меньшей мере для уменьшения воздействия на фоточувствительный барабан по сравнению со случаем обычного формирования порошкового изображения. Этот момент такой же, как и в случае вышеприведенных Вариантов осуществления. Дополнительно продолжаются измерения, пока не завершится блок-схема алгоритма из фиг. 23А и 23B. Этот момент также аналогичен. Время ожидания для ожидающей обработки на этапе S2303 устанавливается в соответствии с технической причиной, аналогичной таковой на этапе S1903 на фиг. 19.
Моменты с T1 по T6 на фиг. 24 соответствуют обработке в цикле для n=1 по 12. Состояние, где последовательно формируются электростатические скрытые изображения для коррекции рассовмещения. Дополнительно на фиг. 24 в период моментов T4-T6, в отношении фоточувствительного барабана для соответствующих цветов, электростатическое скрытое изображение для коррекции рассовмещения образуется примерно за каждую одну треть периода фоточувствительного барабана. На чертеже в порядке лазерных сигналов 90a, 90b, 90c, 90d, 91a, 91b, 91c, 91d, 92a, 92b, 92c и 92d формируются соответствующие электростатические скрытые изображения. Как проиллюстрировано в описании цепи 147 контроля тока на фиг. 18, значение тока, которое нужно обнаружить, имеет значение, в котором накладываются токи, текущие в заряжающих роликах 23а-23d. Сигналы 95a-95d, 96a-96d и 97a-97d обнаружения тока, проиллюстрированные на чертеже, не накладываются полностью. Электростатическое скрытое изображение образуется, как проиллюстрировано. Здесь сигналы обнаружения тока соответствуют напряжению 56 обнаружения и напряжению 561 обнаружения, описанным выше.
Далее будет описываться фиг. 23B. Фиг. 23B иллюстрирует обработку по обнаружению электростатических скрытых изображений для коррекции рассовмещения, сформированных в блок-схеме алгоритма из фиг. 23А. Как указано моментом T5 на фиг. 24, перед тем как завершается формированием электростатического скрытого изображения для коррекции рассовмещения, начинается обнаружение электростатического скрытого изображения для коррекции рассовмещения. Соответственно, часть обработки, проиллюстрированной на фиг. 23B, выполняется блоком 54 управления параллельно с обработкой из фиг. 23А.
Сначала на этапах S2311-S2314 блок 54 управления выполняет обработку в цикле для i=1 по 12. На этапе S2312 блок 54 управления измеряет моменты прибытия ts(i) (i=1 до 12) от опорного момента двенадцати электростатических скрытых изображений, сформированных при обработке на фиг. 23А. В соответствии с обработкой обнаружения на этапе S2312 можно обнаружить, что каждое электростатическое скрытое изображение, сформированное на фоточувствительном барабане, проходит через положение, обращенное к заряжающему ролику. На этапе S2313 фактические результаты измерения временно сохраняются в RAM 323. При обработке на этапе S2313 сохраняется множество результатов обнаружения, эти результаты обнаружения становятся фактическим результатом измерения (первым фактическим результатом измерения), в котором по меньшей мере уменьшена составляющая цикла вращения фоточувствительного барабана.
Иллюстрируется состояние, где обнаружение тока изменяется в моменты с T5 по T7 на фиг. 24. Результаты 95а-95d получаются путем обнаружения изменения сигнала обнаружения тока в соответствии с электростатическим скрытым изображением, сформированным лазерными сигналами 90а-90d. Также результаты 96а-96d являются результатами обнаружения лазерных сигналов 91а-91d; результаты 97а-97d являются результатами обнаружения лазерных сигналов 92а-92d. Моменты обнаружения не перекрываются друг с другом. Соответственно, может применяться цепь контроля тока, общая для блоков обработки (заряжающий ролик), которые нужно обнаружить.
Впоследствии на этапах S2315-S2318 блок 54 управления выполняет обработку в цикле для k=1 до 3. На этапе S2316 блок 54 управления выполняет следующую логическую операцию для каждого значения k. Способ работы может выполняться CPU 321 на основе программного кода. Вместо этого способ может выполняться с использованием одного из аппаратной схемы и таблицы. Способ специально этим не ограничивается.
δesYM(k)=ts(4×(k-1)+1+1)-ts(4×(k-1)+1)Уравнение 18
δesYC(k)=ts(4×(k-1)+1+2)-ts(4×(k-1)+1)Уравнение 19
δesYBk(k)=ts(4×(k-1)+1+3)-ts(4×(k-1)+1)Уравнение 20
Точнее говоря, на этапе S2316 блок 54 управления вычисляет, для k=1, величины рассовмещения δesYM(1), δesYC(1) и δesYBk(1) в направлении субсканирования для соответствующих цветов в случае выбора желтого цвета в качестве эталонного для первого раза из значений измерения ts(1)-ts(4) на основе вышеприведенных Уравнений 18-20. Как проиллюстрировано на фиг. 24, результаты ts(1)-ts(4) являются соответствующими фактическими результатами измерения, соответствующими желтому, пурпурному, голубому и черному цветам. Блок 54 управления сохраняет в RAM 323 δesYM(1), δesYC(1) и δesYBk(1), вычисленные на этапе S2317. Информация, сохраненная на этапе S2317, также является фактическим результатом измерения (первым фактическим результатом измерения), в котором по меньшей мере уменьшена составляющая цикла вращения фоточувствительного барабана. Блок 54 управления выполняет аналогичную обработку в цикле для k=2 с использованием результатов обнаружения ts(5)-ts(8). Блок 54 управления дальше выполняет аналогичную обработку в цикле для k=3 с использованием результатов обнаружения ts(9)-ts(12).
В конечном счете на этапе S2319 блок 54 управления вычисляет в соответствии с Уравнениями 21-23 данные, вычисленные при обработке в цикле на этапах S2315-S2318, представляющие величины рассовмещения в направлении субсканирования для соответствующих цветов относительно желтого с аннулированной составляющей цикла вращения фоточувствительного барабана. Данные, представляющие величину рассовмещения, не обязательно являются самой величиной рассовмещения, если только данные сопоставлены с условием рассовмещения.
[Выражение 1]
Дополнительно на этапе S2320 блок 54 управления сохраняет в EEPROM 324 вычисленные δes'YM, δes'YC(1) и δes'YBk в качестве опорного значения, которое является данными, представляющими величину рассовмещения с аннулированной составляющей цикла вращения фоточувствительного барабана. Как описано, информация, сохраненная на этапе S2320, является фактическим результатом измерения (первым фактическим результатом измерения), в котором по меньшей мере уменьшена составляющая цикла вращения фоточувствительного барабана. Сохраненная здесь информация представляет исходное условие, которое должно стать целевым в случае выполнения управления коррекцией рассовмещения. При управлении коррекцией рассовмещения блок 54 управления выполняет управление для того, чтобы аннулировать отклонение от исходного условия, другими словами, чтобы вернуть условие к исходному условию. Информация, сохраненная на этапах S2313 и S2317, которая является основой информации, сохраненной на этапе S2320, может рассматриваться в качестве исходного условия в коррекции рассовмещения.
[Блок-схема алгоритма управления коррекцией рассовмещения]
Далее будет описываться управление коррекцией рассовмещения в этом варианте осуществления с использованием блок-схем алгоритмов из фиг. 25А, 25В-1 и 25B-2. Фиг. 25А иллюстрирует обработку по формированию электростатического скрытого изображения. Фиг. 25В-1 и 25B-2 иллюстрируют обработку по обнаружению электростатического скрытого изображения и коррекции момента испускания лазерного луча в качестве условия формирования изображения. Обработка на этапах фиг. 25А идентична обработке на этапах S1907-S2304 на фиг. 23А. Соответственно, их описание пропускается. Обработка на этапах S2311-S2318 на фиг. 25B-1 идентична обработке на этапах S2311-S2318 на фиг. 23B. Соответственно, их описание пропускается. В дальнейшем будет приведено описание преимущественно отличия от фиг. 23А и 23B.
На этапе S2501 блок 54 управления вычисляет (dδes'YM), (dδes'YC) и (dδes'YBk) на основе фактического результата измерения, сохраненного на этапе S2317 на фиг. 25B-1. Префикс "d" прикрепляется для указания фактически обнаруженного значения результата. Подробности характерного вычисления по существу такие же, как проиллюстрированы в Уравнениях 21-23 выше. На этапе S2502 блок 54 управления временно сохраняет результат вычисления (второй фактический результат измерения) в RAM 323.
На этапе S2503 блок 54 управления получает разность между dδes'YM, вычисленным на этапе S2502, и δes'YM, сохраненным на этапе S2320 на фиг. 23B. В случае, где разность по меньшей мере равна нулю, то есть в случае, где момент обнаружения пурпурного цвета относительно момента обнаружения желтого цвета задерживается по сравнению с опорным (моментом), блок 54 управления опережает момент испускания лазерного луча для пурпурного цвета в соответствии со значением разности, как и в случае этапа S1002 на фиг. 5. С другой стороны, в случае, где разность меньше нуля, то есть в случае, где момент обнаружения пурпурного цвета относительно момента обнаружения желтого цвета опережается по сравнению с опорным, блок 54 управления задерживает момент испускания лазерного луча для пурпурного цвета в соответствии со значением разности. Это позволяет подавить величину рассовмещения между желтым и пурпурным.
Также на этапах S2506-2511 блок 54 управления корректирует момент испускания лазерного луча в качестве условия формирования изображения для голубого и черного, как и в случае пурпурного цвета. Таким образом, блок-схемы алгоритмов из фиг. 25В-1 и 25В-2 также позволяют вернуть настоящее условие рассовмещения к условию рассовмещения (исходному условию) в качестве опорного.
В описании этого варианта осуществления электростатические скрытые изображения 80 образуются в фазах фоточувствительного барабана, а затем на этапе S2319 сохраняют опорное значение, в котором аннулирована составляющая цикла вращения фоточувствительного барабана в соответствии с результатом обнаружения. Впоследствии на фиг. 25А, 25В-1 и 25B-2 электростатические скрытые изображения 80 снова образуются в фазах фоточувствительного барабана. Получается фактический результат измерения, в котором аннулирована полученная составляющая цикла вращения фоточувствительного барабана в соответствии с результатом обнаружения. Полученный результат сравнивается с опорным значением, предварительно вычисленным и сохраненным. Однако можно предположить, например, другой способ вычисления, который не выполняет сравнение с опорным значением, предварительно полученным в качестве среднего значения. Например, данные, полученные на этапе S2301 на фиг. 23А и этапе S2301 на фиг. 25А, предварительно сохраняются. Блок 54 управления может в конечном счете вычислить данные, соответствующие величине рассовмещения, в которых аннулируется составляющая цикла вращения фоточувствительного барабана с использованием сохраненных данных.
Описание будет выполнено с использованием примера вычисления относительной величины рассовмещения между желтым и пурпурным цветом. Предусмотрено, что данными, полученными на этапах S2311-S2314 на фиг. 23B, являются ts(i) (i=1 до 12), а данными, полученными на этапах S2311-S2314 на фиг. 25B-1, являются ts'(i) (i=1 до 12). Разность между желтым в качестве эталонного цвета и пурпурным в качестве измерительного цвета вычисляется блоком 54 управления в соответствии со следующим Уравнением 24.
{(ts'(2)+ts'(6)+ts'(10))-(ts'(1)+ts'(5)+ts'(9))}-{(ts(2)+ts(6)+ts(10))-(ts(1)+ts(5)+ts(9))}Уравнение 24
(ts'(2)+ts'(6)+ts'(10)) в Уравнении 24 соответствует второму фактическому результату измерения для пурпурного с аннулированной составляющей цикла вращения фоточувствительного барабана; (ts'(1)+ts'(5)+ts'(9)) соответствует таковому для желтого; (ts(2)+ts(6)+ts(10)) соответствует первому фактическому результату измерения для пурпурного с аннулированной составляющей цикла вращения фоточувствительного барабана; (ts(1)+ts(5)+ts(9)) соответствует таковому для желтого. Разница с другим цветом может вычисляться блоком 54 управления аналогичным образом.
В случае, где в результате вычисления в соответствии с Уравнением 24 посредством блока 54 управления, например, разность после истекшего времени меньше исходной разности между пурпурным и желтым, блок 54 управления задерживает момент испускания лазерного луча (момент излучения света) для пурпурного в качестве измерительного цвета. Это является такой же мерой, как и в случае обработки на этапах S2505, S2508 и S2511 на фиг. 25B-2. В случае, где результат вычисления положительный, блоком 54 управления выполняется управление, противоположное отрицательному случаю. Аналогичное управление условием формирования изображения (управление моментом излучения света) выполняется для других цветов.
Таким образом, например, другой способ вычисления без сравнения с опорным значением, предварительно полученным в качестве среднего значения, позволяет получить величину рассовмещения с аннулированной составляющей цикла вращения фоточувствительного барабана. Это может применяться не только к блок-схемам алгоритмов на фиг. 23А, 23В, 25В-1 и 25В-2, но также, например, к блок-схемам алгоритмов на фиг. 12 и 13.
Вышеприведенное описание выполнено с использованием заряжающих роликов 23а-23d в качестве блока обработки для обнаружения тока. Однако первичный передаточный валик и проявляющий цилиндр могут выбираться в качестве блока обработки для обнаружения тока.
В случае первичного передаточного валика может предоставляться цепь контроля тока, общая для одной или множества высоковольтных цепей питания первичного переноса, и блок-схемы алгоритмов на фиг. 23А и 23B и фиг. 25А, 25В-1 и 25B-2 могут выполняться с использованием цепи контроля тока. Это соответствует высоковольтной цепи питания первичного переноса, проиллюстрированной на фиг. 17А и 17B в Варианте 4 осуществления. Однако, поскольку первичный передаточный валик принимается в качестве блока обработки для обнаружения тока, высоковольтная цепь питания первичного переноса продолжает оставаться включенной даже после момента T3 на фиг. 24.
В случае проявляющего цилиндра предоставляется цепь контроля тока, общая для одной или множества высоковольтных цепей питания проявки, и блок-схемы алгоритмов на фиг. 23А и 23B и фиг. 25А, 25В-1 и 25B-2 могут выполняться с использованием цепи контроля тока. Способ того, как управлять выходным напряжением от одной или множества высоковольтных цепей питания проявки, такой же, как проиллюстрирован в Варианте 3 осуществления.
Таким образом, в этом варианте осуществления ожидающая обработка на этапе S1903 выполняется блоком 54 управления, чтобы не перекрывать друг с другом моменты обнаружения электростатических скрытых изображений. Соответственно, цепь 147 контроля тока, общая для высоковольтных цепей 46а-46d питания первичного переноса, может выбираться в качестве блока обработки электростатического скрытого изображения. Это позволяет упростить конфигурацию, имеющую отношение к цепи контроля тока.
Управление коррекцией рассовмещения также может выполняться в системе, аналогичной блок-схемам алгоритмов на фиг. 5 и 10 и блок-схемам алгоритмов на фиг. 12 и 13, описанных в Вариантах осуществления с 1 по 3, с использованием общей цепи 50 контроля тока, описанной в этом варианте осуществления. Эта обработка будет описываться в соответствии с блок-схемами алгоритмов из фиг. 26 и 27.
В этом случае сначала блок 54 управления выполняет вышеупомянутую временную диаграмму из фиг. 24. В то же время блок-схемы алгоритмов из фиг. 23А и 26 выполняются параллельно. Что касается описания блок-схемы алгоритма на фиг. 26, обработка на этапах S2311-S2314 аналогична обработке на фиг. 23B.
На этапах S2601-S2604 блок 54 управления выполняет обработку в цикле для k=1 до 4. На этапе S2602 в обработке в цикле для k=1 блок 54 управления вычисляет среднее значение первого, (1+4)-го и (1+4+4)-го значений измерения из числа двенадцати значений измерения, сохраненных на этапе S2313 на фиг. 26, а затем на этапе S2603 сохраняет вычисленное значение в качестве первого опорного значения. В случае, где отличается влияние на каждые данные вследствие децентрирования фоточувствительного барабана, блок 54 управления может вычислять среднее взвешенное значение. Блок 54 управления вычисляет средние значения также для n=2 до 4 аналогичным образом. Информация, сохраненная при обработке в цикле, представляет собой исходное условие, которое должно стать целевым в случае управления коррекцией рассовмещения. При управлении коррекцией рассовмещения блок 54 управления выполняет управление для того, чтобы аннулировать отклонение от исходного условия, другими словами, чтобы вернуть условие к исходному условию.
Впоследствии, после того как создано заранее установленное условие, временная диаграмма на фиг. 24 снова выполняется в заранее установленном условии. Далее блок-схемы алгоритмов на фиг. 25B-1, 25В-2 и 27 выполняются параллельно. Обработка на этапах S2311-S2314 в блок-схеме алгоритма фиг. 27 аналогична обработке на фиг. 25B-1 и 25В-2.
На этапах S2701-S2706 блок 54 управления выполняет обработку в цикле для k=1 по 4. На этапе S2702 при обработке в цикле для k=1 блок 54 управления снова вычисляет среднее значение первого, (1+4)-го и (1+4+4)-го значений измерения из числа двенадцати значений измерения, сохраненных на этапе S2313 на фиг. 27. На этапе S2703 блок 54 управления сравнивает величину среднего значения, вычисленного на этапе S2702 для k=1, и первое опорное значение, сохраненное на этапе S2603.
В соответствии с результатом сравнения на этапе S2703 в случае, где среднее значение, вычисленное на этапе S2702 для k=1, больше первого опорного значения, сохраненного на этапе S2603, момент испускания лазерного луча для первого цвета (желтого) опережается на этапе S2704. С другой стороны, в случае, где среднее значение меньше опорного значения, излучение для первого цвета задерживается на этапе S2705. Впоследствии также для n=2 до 4 выполняется аналогичная обработка в цикле. Это дает возможность вернуть настоящее условие рассовмещения к условию рассовмещения (исходному условию) в качестве опорного.
В Варианте 5 осуществления описано устройство формирования изображений, включающее в себя высоковольтную цепь питания зарядки. Однако также допускается выполнять блок-схемы алгоритмов из фиг. 26 и 27 с использованием одной из высоковольтной цепи питания первичного переноса и высоковольтной цепи питания проявки вместо высоковольтной цепи питания зарядки.
Таким образом, обработка в блок-схемах алгоритмов на фиг. 23 и 25 в Варианте 5 осуществления может выполняться на основе опорных значений, назначенных соответствующим цветам. Также в отношении вычисления величины рассовмещения может допускаться, например, способ вычисления без сравнения с опорным значением, предварительно полученным в качестве среднего значения. Например, блок 54 управления получает величины рассовмещения для желтого, пурпурного, голубого и черного с помощью системы вычисления без сравнения с опорным значением в соответствии со следующими Уравнениями 25-28.
(ts'(1)+ts'(5)+ts'(9))-(ts(1)+ts(5)+ts(9))Уравнение 25
(ts'(2)+ts'(6)+ts'(10))-(ts(2)+ts(6)+ts(10))Уравнение 26
(ts'(3)+ts'(7)+ts'(11))-(ts(3)+ts(7)+ts(11))Уравнение 27
(ts'(4)+ts'(8)+ts'(12))-(ts(4)+ts(8)+ts(12))Уравнение 28
Например, будет описываться Уравнение 26. В случае, когда результат вычисления блоком 54 управления в соответствии с Уравнением 26 является отрицательным, блок 54 управления задерживает момент испускания лазерного луча (момент излучения света) для пурпурного в качестве измерительного цвета. Это соответствует, например, случаю определения, что значение меньше опорного значения на этапе S1001 на фиг. 10, случаю определения, что значение меньше опорного на этапе S1303 на фиг. 13, случаю определения, что значение меньше опорного значения на этапе S2103 на фиг. 21, и случаю определения, что значение меньше опорного значения на этапе S2703 на фиг. 27. В случае, где результат вычисления положительный, блоком 54 управления выполняется управление, противоположное отрицательному случаю. Аналогичное управление условием формирования изображения (управление моментом излучения света) выполняется для других цветов.
Как описано выше, моменты обнаружения, в которые секция обнаружения обнаруживает электростатические скрытые изображения для коррекции рассовмещения, могут устанавливаться не перекрывающими друг друга, чтобы электростатическое скрытое изображение для коррекции рассовмещения можно было сформировать независимо от положения (фазы) фоточувствительного барабана. В этом варианте осуществления, хотя и объясняется, что электростатические скрытые изображения для коррекции рассовмещения образуются всего в трех участках по периметру каждого фоточувствительного барабана (электростатические скрытые изображения для коррекции рассовмещения образуются три раза за одно вращение каждого фоточувствительного барабана), количество местоположений для формирования электростатических скрытых изображений для коррекции рассовмещения не ограничивается тремя для периметра каждого фоточувствительного барабана. Однако точность становится выше, потому что чем больше количество участков, где образуются электростатические скрытые изображения для коррекции рассовмещения, тем больше количество раз, когда блок обнаружения обнаруживает электростатические скрытые изображения для коррекции рассовмещения. Поэтому секция формирования может формировать электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе для каждого цвета и выполнять коррекцию рассовмещения в соответствии с результатами обнаружения.
Вариант 6 осуществления
В вышеприведенных Вариантах осуществления описано, что обработка по получению опорного значения в качестве эталона определения условия рассовмещения выполняется на фиг. 5, 12, 19, 23A и 23B перед тем, как выполняется управлением коррекцией рассовмещения на фиг. 10, 13, 21, 25A, 25В-1 и 25B-2. Однако в том случае, если условие возвращается к фиксированному механическому состоянию в случае, где повышенная температура в устройстве возвращается к нормальной температуре в устройстве, не обязательно выполнять обработку для получения опорного значения.
Вместо этого можно применить заранее установленное опорное значение (исходное условие), выясненное на одном из этапа проектирования и этапа производства. Заранее установленное опорное значение используется вместо значений, сохраненных на этапе S506 на фиг. 5, этапе S1208 на фиг. 12, этапе S1910 на фиг. 19, любом из этапов S2313, S2317 и S2320 на фиг. 23А и 23B и этапе S2603 на фиг. 26. Заранее установленное исходное условие, которое должно стать целевым в коррекции условия рассовмещения, сохраняется, например, EEPROM 324 на фиг. 3, и блок 54 управления обращается к нему по необходимости. В соответствии с этим обращением выполняется каждая блок-схема алгоритма, описанная выше. Таким образом, выполнение каждого из Вариантов осуществления не ограничивается режимом обнаружения каждый раз исходного условия в управлении коррекцией рассовмещения и сохранения обнаруженного исходного условия.
В случае предварительного сохранения в EEPROM 324 опорного значения, применяемого вместо значений, сохраненных на этапах S506 и S1208, заранее установленная вращательная фаза ассоциируется с сохраненным опорным значением и сохраняется вместе с ним. Блок 54 управления обращается к сохраненной информации о заранее установленной вращательной фазе и формирует электростатическое скрытое изображение для коррекции рассовмещения, как на этапах S503 и S1203 в заранее установленной вращательной фазе. Однако в случае, где n раз формирования электростатических скрытых изображений для коррекции рассовмещения на этапах S1203-S1205 превышают одно вращение фоточувствительного барабана, нет необходимости сохранять заранее установленную вращательную фазу, ассоциированную с опорным значением.
[Разновидность]
Выше описано устройство формирования изображений, включающее в себя промежуточную транспортную ленту 30. Однако можно найти применение к другой системе в устройстве формирования изображений. Например, можно найти применение к устройству формирования изображений, применяющему систему, которая включает в себя транспортную ленту материала записи и непосредственно переносит порошковое изображение, проявленное на каждом фоточувствительном барабане 22, на материал переноса (материал записи), перемещаемый транспортной лентой материала записи (бесконечной лентой). В этом случае тонерная метка для обнаружения рассовмещения, как проиллюстрировано на фиг. 6, образуется на транспортной ленте материала записи (бесконечной ленте).
Описание выполнено с использованием примера применения первичного передаточного валика 26а в качестве секции первичного переноса. Однако может применяться, например, контактный тип секции первичного переноса, использующий лезвие переноса. Вместо этого может применяться секция первичного переноса, которая формирует участок контакта первичного переноса с помощью давления на поверхность, как проиллюстрировано в выложенной заявке на патент Японии № 2007-156455.
В вышеприведенном описании информация о токе обнаруживается цепью 47 контроля тока в качестве информации о поверхностном потенциале, в которой отражен поверхностный потенциал фоточувствительного барабана. Причина в том, что блок 54 управления выполняет постоянное регулирование напряжения во время первичного переноса при формировании изображения. Дополнительно некоторая система применения постоянного тока, которая подает напряжение переноса на секцию первичного переноса, известна в качестве другой системы первичного переноса. То есть также допускается применение постоянного регулирования тока в качестве системы первичного переноса при формировании изображения. В этом случае изменение напряжения обнаруживается в виде информации о поверхностном потенциале, в которой отражается поверхностный потенциал фоточувствительного барабана. Обработка, аналогичная таковой в вышеупомянутой блок-схеме алгоритма, может затем выполняться за время, пока не обнаружится характерная форма изменения напряжения, как и в случае на фиг. 8. Это также поддерживается в высоковольтных цепях 43а-43d питания зарядки, высоковольтных цепях 44а-44d питания проявки, описанных в Варианте 3 осуществления, и высоковольтном источнике питания, описанном в Вариантах 4 и 5 осуществления.
В Вариантах 4 и 5 осуществления описан случай применения высоковольтной цепи питания, в которой цепь контроля тока является общей для блоков обработки. Однако методика этим не ограничивается. Эта обработка также может выполняться с применением, например, высоковольтной цепи питания, проиллюстрированной на фиг. 2А и 2B, и высоковольтных цепей 44а-44d питания проявки, проиллюстрированных на фиг. 16А и 16B в Варианте 3 осуществления.
Более того, в вышеприведенных Вариантах осуществления описание выполнено с использованием устройства формирования цветных изображений в качестве примера. Однако электростатическое скрытое изображение для коррекции рассовмещения может использоваться в качестве электростатического скрытого изображения для обнаружения для другого применения. Например, в монохромном принтере это может использоваться для случая соответствующего управления положением, где на материале записи образуется порошковое изображение. В этом случае идеальное время от формирования электростатического скрытого изображения для обнаружения на фоточувствительном барабане до обнаружения электростатического скрытого изображения для обнаружения на одном из участка контакта проявления, участка контакта переноса и участка контакта зарядки предварительно сохраняется в EEPROM 324. Блок 54 управления затем сравнивает один из результата, измеренного на этапе S505 на фиг. 10, и результата, вычисленного на этапе S1302 на фиг. 13, с предварительно сохраненным идеальным временем. Это идеальное время соответствует опорному значению в блок-схемах алгоритмов на фиг. 10 и 13. В соответствии с его величиной может выполняться обработка, аналогичная таковой на этапах S1001-S1003 на фиг. 10 и этапах S1303-S1305 на фиг. 13. Это позволяет корректировать положение излучения света на фоточувствительном барабане до подходящего положения и дает возможность корректировать положение формирования порошкового изображения на материале записи до подходящего условия. Соответственно, например, в случае печати форм на предварительно отпечатанном листе можно получить печатную продукцию с организованным расположением.
Хотя настоящее изобретение описано со ссылкой на типовые варианты осуществления, нужно понимать, что изобретение не ограничивается раскрытыми типовыми вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации, чтобы заключать в себе все такие модификации и эквивалентные конструкции и функции.
Реферат
Устройство формирования изображений включает в себя блоки обработки, которые плотно размещаются вокруг соответствующих светочувствительных элементов и воздействуют на светочувствительные элементы, секцию излучения света, которая формирует электростатическое скрытое изображение для обнаружения на светочувствительном элементе, и секцию обнаружения, которая обнаруживает, что электростатическое скрытое изображение проходит через положение, обращенное к блоку обработки, и секцию управления, которая выполняет управление коррекцией рассовмещения на основе результата обнаружения. Оно добивается решения проблемы, которая возникает при обнаружении традиционного порошкового изображения для обнаружения с помощью оптического датчика, и повышения удобства в эксплуатации устройства формирования изображений. 6 н. и 54 з.п. ф-лы, 37 ил.
Формула
секцию подачи питания для подачи питания к по меньшей мере одной из секций зарядки, секции проявления и секции переноса;
секцию обнаружения для обнаружения вывода для каждого цвета из секции подачи питания, когда электростатическое скрытое изображение для коррекции рассовмещения, сформированное на светочувствительном элементе для каждого цвета посредством излучения света секцией излучения света, проходит через положение, обращенное к секции, в которой питание подается, из числа секции зарядки, секции проявления и секции переноса; и
секцию управления, которая выполняет управление коррекцией рассовмещения так, что обнаруженное условие рассовмещения по меньшей мере приближается к исходному условию на основе результата обнаружения из секции обнаружения.
причем устройство формирования цветных изображений включает в себя секцию обнаружения порошкового изображения для обнаружения порошкового изображения для коррекции рассовмещения, сформированного на элементе переноса, и
секция управления, при условии, в котором управление коррекцией рассовмещения отражается на основе результата обнаружения порошкового изображения для коррекции рассовмещения с помощью секции обнаружения порошкового изображения, делает секцию излучения света излучающей свет, посредством чего электростатическое скрытое изображение для коррекции рассовмещения формируется на светочувствительном элементе.
в котором секция излучения света формирует электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе для каждого цвета,
секция обнаружения обнаруживает электростатические скрытые изображения для коррекции рассовмещения, сформированные во множестве положений,
секция управления выполняет управление коррекцией рассовмещения так, что обнаруженное условие рассовмещения по меньшей мере приближается к исходному условию на основе результата обнаружения электростатических скрытых изображений для коррекции рассовмещения, сформированных в каждом из множества положений на светочувствительном элементе для каждого цвета.
в котором секция излучения света формирует первые электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе,
секция обнаружения обнаруживает вывод, который согласовывает каждый из первых электростатических скрытых изображений для коррекции рассовмещения, сформированных во множестве положений, секция управления заставляет блок памяти сохранять результат обнаружения, обнаруженный секцией обнаружения, первых электростатических скрытых изображений для коррекции рассовмещения,
секция излучения света формирует вторые электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе при заранее определенном условии, и
секция обнаружения обнаруживает вывод, который согласовывает каждый из вторых электростатических скрытых изображений для коррекции рассовмещения, образованных во множестве положений,
секция управления выполняет управление коррекцией рассовмещения на основе результата обнаружения первого электростатического скрытого изображения для коррекции рассовмещения, сохраненного в блоке памяти, и второго электростатического скрытого изображения для коррекции рассовмещения из секции обнаружения.
секцию подачи питания для подачи питания к блоку обработки, соответствующему каждому цвету;
секцию обнаружения для обнаружения, для каждого цвета, вывода из секции подачи питания, когда электростатическое скрытое изображение для коррекции рассовмещения, сформированное на светочувствительном элементе для каждого цвета посредством излучения света секцией излучения света, проходит через положение, обращенное к блоку обработки; и
секцию управления для выполнения управления коррекцией рассовмещения так, что обнаруженное условие рассовмещения по меньшей мере приближается к исходному условию, на основе результата обнаружения из секции обнаружения.
причем устройство формирования цветных изображений включает в себя секцию обнаружения порошкового изображения для обнаружения порошкового изображения для коррекции рассовмещения, сформированного на элементе переноса, и
секция управления, при условии, в котором управление коррекцией рассовмещения отражается на основе результата обнаружения порошкового изображения для коррекции рассовмещения посредством секции обнаружения порошкового изображения, делает секцию излучения света излучающей свет, посредством чего электростатическое скрытое изображение для коррекции рассовмещения формируется на светочувствительном элементе.
в котором секция излучения света формирует электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе для каждого цвета,
секция управления выполняет управление коррекцией рассовмещения, так что обнаруженное условие рассовмещения по меньшей мере приближается к исходному условию на основе результата обнаружения электростатических скрытых изображений для коррекции рассовмещения, сформированных в каждом из множества положений на светочувствительном элементе для каждого цвета.
в котором секция излучения света формирует первые электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе,
секция обнаружения обнаруживает вывод, который согласовывает каждое из первых электростатических скрытых изображений для коррекции рассовмещения, сформированных во множестве положений, секция управления заставляет блок памяти сохранять результат обнаружения, обнаруженный секцией обнаружения, первых электростатических скрытых изображений для коррекции рассовмещения,
секция излучения света формирует вторые электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе при заранее определенном условии, и
секция обнаружения обнаруживает вывод, который согласовывает каждый из вторых электростатических скрытых изображений для коррекции рассовмещения, сформированных во множестве положений,
секция управления выполняет управление коррекцией рассовмещения на основе результата обнаружения первого электростатического скрытого изображения для коррекции рассовмещения, сохраненного в блоке памяти, и второго электростатического скрытого изображения для коррекции рассовмещения из секции обнаружения.
в котором секция излучения света формирует электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе,
секция обнаружения обнаруживает моменты, в которые электростатические скрытые изображения для коррекции рассовмещения проходят через положение, обращенное к блоку обработки, и
секция управления выполняет управление коррекцией рассовмещения на основе результатов обнаружения момента и опорного значения.
в котором секция излучения света формирует электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе для каждого цвета,
секция управления получает первый фактический результат измерения, в котором составляющая цикла вращения светочувствительного элемента по меньшей мере подавляется на основе результатов обнаружения, обнаруженных секцией обнаружения, соответствующих электростатических скрытых изображений для коррекции рассовмещения,
секция излучения света снова формирует электростатические скрытые изображения для коррекции рассовмещения во множестве положений на светочувствительном элементе для каждого цвета при заранее определенном условии,
секция управления получает второй фактический результат измерения, в котором составляющая цикла вращения светочувствительного элемента по меньшей мере подавляется на основе результатов обнаружения, обнаруженных секцией обнаружения, электростатического скрытого изображения для коррекции рассовмещения, которое снова формируется, и
секция управления выполняет управление коррекцией рассовмещения на основе первого фактического результата измерения и второго фактического результата измерения.
в котором блок обработки включает в себя многочисленные типы блоков обработки, включающие в себя первый блок обработки, который является объектом обнаружения посредством секции обнаружения, и второй блок обработки, который предусмотрен раньше стороны первого блока обработки в направлении движения электростатического скрытого изображения,
причем секция управления, в случае когда электростатические скрытые изображения для коррекции рассовмещения проходят через положение, обращенное ко второму блоку обработки, управляет вторым блоком обработки таким образом, что второй блок обработки находится вдали от положения, в котором формируется порошковое изображение, или таким образом, чтобы эффект для светочувствительного элемента от второго блока обработки был меньшим, чем от обычного процесса формирования изображения.
в котором первый блок обработки является секцией зарядки, и второй блок обработки является секцией проявления и секцией переноса,
причем секция управления, в случае когда электростатические скрытые изображения для коррекции рассовмещения проходят через положение, обращенное к секции проявления, управляет секцией проявления так, чтобы секция проявления находилась вдали от положения, в котором формируется порошковое изображение, или таким образом, чтобы эффект для светочувствительного элемента от секции проявления был меньшим, чем от обычного процесса формирования изображения, и
причем секция управления, в случае когда электростатические скрытые изображения для коррекции рассовмещения проходят через положение, обращенное к секции переноса, управляет секцией переноса так, чтобы секция переноса находилась вдали от положения, в котором формируется порошковое изображение, или таким образом, чтобы эффект для светочувствительного элемента от секции переноса был меньшим, чем от обычного процесса формирования изображения.
светочувствительный элемент, выполненный с возможностью приведения во вращение;
секцию зарядки, которая заряжает светочувствительный элемент;
секцию излучения света, которая излучает свет, чтобы сформировать электростатическое скрытое изображение на светочувствительном элементе, причем секция излучения света выполнена с возможностью формирования электростатического скрытого изображения для коррекции рассовмещения;
секцию проявления, которая проявляет электростатическое скрытое изображение для формирования порошкового изображения;
секцию переноса, которая переносит порошковое изображение в секцию для переноса;
секцию обнаружения, которая обнаруживает вывод через секцию зарядки, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции зарядки, вывод через секцию проявления, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции проявления, или вывод через секцию переноса, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции переноса, и
секцию управления, которая корректирует условие формирования для формирования электростатического скрытого изображения во время формирования изображения, на основании результата обнаружения секцией обнаружения.
причем секция обнаружения обнаруживает вывод секции подачи питания, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции зарядки.
причем секция обнаружения обнаруживает вывод секции подачи питания, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции проявления.
причем секция обнаружения обнаруживает вывод секции подачи питания, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции переноса.
в котором секция излучения света формирует электростатическое скрытое изображение для коррекции рассовмещения во множестве положений светочувствительного элемента,
причем секция обнаружения обнаруживает выводы через секцию зарядки, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции зарядки, выводы через секцию проявления, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции проявления, или выводы через секцию переноса, когда электростатическое скрытое изображение для коррекции рассовмещения проходит через положение, обращенное к секции переноса, на основании каждого из множества положений светочувствительного элемента, и
причем секция управления корректирует условие формирования для формирования электростатического скрытого изображения во время формирования изображения на основании результата обнаружения секцией обнаружения.
в котором секция излучения света формирует электростатические скрытые изображения для первой коррекции множества положений светочувствительного элемента,
причем секция обнаружения обнаруживает выводы на основании каждого из электростатических скрытых изображений для первой коррекции сформированных в первых положениях светочувствительного элемента,
причем секция управления сохраняет результат обнаружения выводов на основании каждого из электростатических скрытых изображений для первой коррекции в блоке памяти,
причем секция излучения света формирует электростатические скрытые изображения для второй коррекции множества положений светочувствительного элемента при заранее определенном условии,
причем секция обнаружения обнаруживает вывод на основании каждого из электростатических скрытых изображений для второй коррекции, сформированных во множестве положений светочувствительного элемента, и
причем секция управления корректирует условие формирования для формирования электростатического скрытого изображения во время формирования изображения, на основании результатов обнаружения выводов согласно каждому из электростатических скрытых изображений для первой и второй коррекций.
в котором секция обнаружения предусмотрена раньше стороны секции зарядки в качестве объекта обнаружения посредством секции обнаружения в направлении движения электростатического скрытого изображения,
причем секция управления, в случае когда электростатические скрытые изображения для коррекции рассовмещения проходят через положение, обращенное к секции проявления, управляет секцией проявления так, чтобы секция проявления находилась вдали от положения, в котором формируется порошковое изображение, или таким образом, чтобы эффект для светочувствительного элемента от секции проявления был меньшим, чем от обычного процесса формирования изображения.
в котором секция переноса предусмотрена раньше стороны секции переноса в качестве объекта обнаружения посредством секции обнаружения в направлении движения электростатического скрытого изображения,
причем секция управления, в случае когда электростатические скрытые изображения для коррекции рассовмещения проходят через положение, обращенное к секции проявления, управляет секцией проявления так, чтобы секция проявления находилась вдали от положения, в котором формируется порошковое изображение, или таким образом, чтобы эффект для светочувствительного элемента от секции проявления был меньшим, чем от обычного процесса формирования изображения.
причем устройство формирования изображения включает в себя множество светочувствительных элементов,
причем секция обнаружения главным образом выполнена с возможностью обнаружения электростатических скрытых изображений для коррекции рассовмещения, сформированных на множестве светочувствительных элементов, и причем моменты обнаружения электростатических скрытых изображений для коррекции рассовмещения посредством секции обнаружения не перекрываются друг с другом.
в котором устройство формирования изображения включает в себя множество светочувствительных элементов,
причем устройство формирования изображения включает в себя множество секций обнаружения, каждая из которых соответствует каждому из множества светочувствительных элементов и независимо обнаруживает каждое из электростатических скрытых изображений для коррекции рассовмещения, сформированных на множестве светочувствительных элементов.
в котором устройство формирования изображения включает в себя множество светочувствительных элементов,
причем секция управления корректирует рассовмещения между множеством светочувствительных элементов посредством коррекции условия формирования для формирования электростатического скрытого изображения во время формирования изображения.
в котором коррекция условия формирования для формирования электростатического скрытого изображения во время формирования изображения включает в себя коррекцию момента излучения света, посредством блока формирования изображений, или скорости светочувствительного элемента, когда секция излучения света излучает свет.
секцию подачи питания для подачи питания к по меньшей мере одной из секций зарядки, секции проявления и секции переноса;
секцию обнаружения для обнаружения вывода для каждого цвета из секции подачи питания, когда электростатическое скрытое изображение для коррекции рассовмещения, сформированное на светочувствительном элементе для каждого цвета посредством излучения света секцией излучения света, проходит через положение, обращенное к секции, в которой питание подается, из числа секции зарядки, секции проявления и секции переноса; и
секцию управления, которая выполняет управление рассовмещением для возврата условия рассовмещения, обнаруженного секцией подачи питания, к исходному условию на основе результата обнаружения секцией обнаружения.
секцию подачи питания для подачи питания к блоку обработки, соответствующему каждому цвету;
секцию обнаружения для обнаружения, для каждого цвета, вывода из секции подачи питания, когда электростатическое скрытое изображение для коррекции рассовмещения, сформированное на светочувствительном элементе для каждого цвета посредством излучения света секцией излучения света, проходит через положение, обращенное к блоку обработки; и
секцию управления, которая выполняет управление рассовмещением для возврата условия рассовмещения, обнаруженного секцией подачи питания, к исходному условию на основе результата обнаружения секцией обнаружения.
светочувствительный элемент, выполненный с возможностью приведения во вращение;
секцию излучения света для излучения света, чтобы сформировать электростатическое скрытое изображение на светочувствительном элементе, причем секция излучения света выполнена с возможностью формирования электростатического скрытого изображения для коррекции рассовмещения;
секцию обнаружения для обнаружения периода времени от момента, когда электростатическое скрытое изображение для коррекции рассовмещения формируется на светочувствительном элементе посредством секции излучения света до тех пор, пока электростатическое скрытое изображение для коррекции рассовмещения не обнаружено,
секцию управления, которая корректирует условие формирования для формирования электростатического скрытого изображения во время формирования изображения, на основании результата обнаружения секцией обнаружения.
в котором секция управления корректирует условие формирования для формирования электростатического скрытого изображения во время формирования изображения так, что условие рассовмещения, при котором электростатическое скрытое изображение для коррекции рассовмещения обнаружено секцией обнаружения, по меньшей мере приближается к исходному условию, при котором исходное время получено.
дополнительно содержащее секцию обработки, которая предусмотрена по периметру светочувствительного элемента для воздействия на светочувствительный элемент,
причем секция обнаружения обнаруживает, что электростатическое скрытое изображение для коррекции рассовмещения, сформированное на светочувствительном элементе, проходит через положение, обращенное к секции обработки.
дополнительно содержащее секцию подачи питания, которая подает питание к секции обработки;
секцию обнаружения, которая обнаруживает выводы секции подачи питания, когда электростатическое скрытое изображение для коррекции рассовмещения, сформированное на светочувствительных элементах проходит через положение, обращенное к секции обработки.
секцию зарядки, которая заряжает светочувствительный элемент;
секцию проявления, которая проявляет электростатическое скрытое изображение, сформированное на светочувствительном элементе для формирования порошкового изображения; и
секцию переноса, которая переносит порошковое изображение, сформированное на светочувствительном элементе в секцию для переноса.
причем секция управления делает секцию излучения света излучающей свет для формирования электростатического скрытого изображения для коррекции на светочувствительном элементе в соответствии с порошковым изображением для коррекции, обнаруженным посредством секции обнаружения порошкового изображения.
причем секция управления делает секцию излучения света излучающей свет для формирования электростатического скрытого изображения для коррекции на светочувствительном элементе в положении, в котором электростатическое скрытое изображение для коррекции рассовмещения, чтобы получить исходное время, формируется.
в котором секция излучения света формирует электростатические скрытые изображения для первой коррекции во множестве положений на светочувствительном элементе,
причем секция обнаружения обнаруживает период времени от момента, когда электростатические скрытые изображения для коррекции рассовмещения формируются на светочувствительном элементе посредством секции излучения света до тех пор, пока электростатические скрытые изображения для коррекции рассовмещения не обнаружены, для каждого цвета электростатических скрытых изображений, и
причем секция управления корректирует условие формирования для формирования электростатического скрытого изображения во время формирования изображения на основании результата обнаружения посредством секции обнаружения.
в котором исходное время основано на результатах обнаружения электростатического скрытого изображения для коррекции, сформированного на одном или более положениях светочувствительного элемента.
в котором секция излучения света формирует электростатические скрытые изображения для первой коррекции во множестве положений светочувствительного элемента,
причем секция обнаружения обнаруживает выводы на основании каждого из электростатических скрытых изображений для первой коррекции, сформированных во множестве положений светочувствительного элемента,
причем секция управления сохраняет результат обнаружения выводов на основании каждого из электростатических скрытых изображений для первой коррекции в блоке памяти,
причем секция излучения света формирует электростатические скрытые изображения для второй коррекции во множестве положений светочувствительного элемента, при заранее определенном условии,
причем секция обнаружения обнаруживает выводы согласно каждому из электростатических скрытых изображений для второй коррекции, сформированных во множестве положений светочувствительного элемента, и
причем секция управления корректирует условие формирования для формирования электростатического скрытого изображения во время формирования изображения на основании результатов обнаружения выводов согласно каждому из электростатических скрытых изображений для первой и второй коррекций.
причем блок обработки включает в себя множество типов блоков обработки, включающих в себя первый блок обработки, который является объектом обнаружения посредством секции обнаружения, и второй блок обработки, который предусмотрен раньше стороны первого блока обработки в направлении движения электростатического скрытого изображения,
причем секция управления, в случае когда электростатические скрытые изображения для коррекции проходят через положение, обращенное ко второму блоку обработки, управляет вторым блоком обработки таким образом, что второй блок обработки находится вдали от положения, в котором формируется порошковое изображение, или таким образом, чтобы эффект для светочувствительного элемента от второго блока обработки был меньшим, чем от обычного процесса формирования изображения.
первый блок обработки является секцией переноса, а второй блок обработки является секцией проявления.
в котором первый блок обработки является секцией зарядки, и второй блок обработки является секцией проявления и секцией переноса,
причем секция управления, в случае когда электростатические скрытые изображения для коррекции проходят через положение, обращенное к секции проявления, управляет секцией проявления так, чтобы секция проявления находилась вдали от положения, в котором формируется порошковое изображение, или таким образом, чтобы эффект для светочувствительного элемента от секции проявления был меньшим, чем от обычного процесса формирования изображения, и
причем секция управления, в случае когда электростатические скрытые изображения для коррекции проходят через положение, обращенное к секции переноса, управляет секцией переноса так, чтобы секция переноса находилась вдали от положения, в котором формируется порошковое изображение, или таким образом, чтобы эффект для светочувствительного элемента от секции переноса был меньшим, чем от обычного процесса формирования изображения.
в котором ширина электростатического скрытого изображения для коррекции в направлении основного сканирования составляет по меньшей мере половину или больше ширины области изображения в направлении основного сканирования.
в котором устройство формирования изображения включает в себя множество светочувствительных элементов,
причем секция обнаружения главным образом выполнена с возможностью обнаружения электростатических скрытых изображений для коррекции, сформированных на множестве светочувствительных элементов, и причем моменты обнаружения электростатических скрытых изображений для коррекции посредством секции обнаружения не перекрываются друг с другом.
причем устройство формирования изображения включает в себя множество светочувствительных элементов,
причем устройство формирования изображения включает в себя множество секций обнаружения, каждая из которых соответствует каждому из множества светочувствительных элементов и независимо обнаруживает каждое из электростатических скрытых изображений для коррекции рассовмещения, сформированных на множестве светочувствительных элементов.
причем устройство формирования изображения включает в себя множество светочувствительных элементов,
причем секция управления корректирует рассовмещение между множеством светочувствительных элементов посредством коррекции условия формирования для формирования электростатического скрытого изображения во время формирования изображения.
в котором коррекция условия формирования для формирования электростатического скрытого изображения во время формирования изображения включает в себя коррекцию момента излучения света посредством блока излучения света или скорости светочувствительного элемента, когда секция излучения света излучает свет.
Комментарии