Рукоятка для хирургического светильника с датчиками и хирургический светильник - RU2722118C2
Код документа: RU2722118C2
Чертежи





Описание
Настоящее изобретение относится к рукоятке хирургического светильника, содержащей захват (также называемый ручкой), выполненный с возможностью установки на плафоне хирургического светильника и образующий захватываемую поверхность с внешней стороны. Настоящее изобретение также относится к хирургическому светильнику, содержащему такую рукоятку.
В уровне техники известны хирургические светильники, содержащие некоторую сенсорную систему, которая обнаруживает объект, расположенный между областью, в которой проводят операцию, и/или областью раны и плафоном хирургического светильника. В случае, когда объект, например часть тела человека (например, его голова) частично перекрывает пучки световых лучей, создаваемых обособленными или отдельными лампами хирургического светильника, происходит уменьшение яркости перекрытых отдельных ламп или уменьшение уровня освещенности, обеспечиваемого перекрытыми отдельными лампами, или даже их выключение. Яркость же остальных ламп хирургического светильника, которые не перекрывает объект, может быть увеличена для дальнейшего обеспечения равномерной интенсивности освещения области раны. В таких хирургических светильниках датчики обычно встроены непосредственно внутрь плафона хирургического светильника.
Таким образом, можно уменьшить или предотвратить нагрев объекта, например головы оперирующего хирурга, связанный с интенсивностью светового излучения хирургического светильника. Однако было обнаружено, что известные системы имеют недостаток, заключающийся в том, что хирургические светильники, оборудованные сенсорной системой, обычно являются относительно сложными и, таким образом, дорогостоящими для производства вследствие увеличенных производственных затрат. Кроме того, вследствие относительно небольшого количества клиентов, желающих располагать такой сенсорной системой, массовое производство таких хирургических светильников, жестко привязанных к сенсорной системе, до сих пор имело относительно низкую экономическую эффективность. В частности, конечные пользователи, которые изначально не были заинтересованы в сенсорной системе, часто считают, что такой хирургический светильник имеет для них слишком высокую стоимость.
Таким образом, задача настоящего изобретения заключается в преодолении этих недостатков уровня техники и создании хирургического светильника, имеющего наибольшую рентабельность при его массовом производстве, но выполненного с возможностью его оборудования сенсорной системой в индивидуальном порядке.
В настоящем изобретении поставленная задача решена путем использования рукоятки, в которой к ее захвату присоединен с возможностью отсоединения сенсорный модуль, содержащий по меньшей мере один датчик расстояния, выполненный с возможностью обнаружения положения объекта (то есть измерения расстояния между объектом и рукояткой и/или сенсорным модулем).
Если конечный пользователь хирургического светильника дополнительно хочет использовать сенсорную систему, модульная конструкция позволяет легко заменить имеющуюся рукоятку рукояткой согласно настоящему изобретению. Известные рукоятки обычно присоединены к плафону с возможностью их отсоединения при демонтаже с целью стерилизации. Таким образом, хирургический светильник может быть особенно легко оборудован в индивидуальном порядке сенсорным модулем, содержащим датчик расстояния.
Другие предпочтительные варианты реализации пояснены в зависимых пунктах формулы изобретения и подробно описаны ниже.
Сенсорный модуль предпочтительно содержит корпус, в котором размещен, установлен или закреплен по меньшей мере один датчик расстояния. Таким образом, сформирована наиболее надежная конструкция сенсорного модуля, а датчик расстояния защищен от окружающей среды.
Кроме того, сенсорный модуль предпочтительно содержит несколько датчиков расстояния, зоны измерения или рабочие области которых направлены в сторону друг от друга (начиная от корпуса) своими соответствующими центральными осями или осями ориентации. Следовательно, в рабочем состоянии реализован полнейшй контроль области под плафоном.
В данном случае корпус предпочтительно содержит или образует дискообразную полую часть, внутри которой установлен или закреплен указанный по меньшей мере один датчик расстояния. Таким образом, сенсорный модуль имеет особенно компактную конструкцию и занимает минимум места.
В случае выполнения корпуса в области указанного по меньшей мере одного датчика расстояния проницаемым для измерительного сигнала, который необходимо зарегистрировать этим датчиком, этот датчик предпочтительно размещен в корпусе с обеспечением его защиты от окружающей среды.
В случае, когда указанный по меньшей мере один датчик расстояния выполнен в виде инфракрасного датчика, сенсорный модуль оборудован проверенными измерительными датчиками, которые позволяют уменьшить стоимость производства сенсорного модуля и/или рукоятки.
Кроме того, полезно, если сенсорный модуль содержит принимающую часть рукоятки, присоединенную с возможностью отсоединения к элементу рукоятки. Это упрощает замену нестерильного захвата новым или стерильным захватом благодаря отсутствию необходимости в снятии сенсорного модуля. Кроме того, это позволяет присоединять различные захваты к сенсорному модулю.
В этом случае принимающая часть рукоятки предпочтительно образует принимающий стержень, на который по меньшей мере в одном рабочем состоянии рукоятки надета, то есть посажена с натягом, втулка захвата, имеющая захватываемую поверхность. Таким образом, захват весьма жестко прикреплен к сенсорному модулю.
В этом варианте по меньшей мере в одном рабочем состоянии захват предпочтительно присоединен к сенсорному модулю путем посадки с облеганием и/или посредством воспринимающего нагрузку соединения таким образом, что он может быть заменен особенно быстро.
Кроме того, сенсорный модуль предпочтительно содержит вычислительный блок (также называемый блоком обработки данных), электрически соединенный по меньшей мере с одним датчиком расстояния и вырабатывающий управляющие сигналы для управления хирургическим светильником в зависимости от результатов измерения, полученных указанным по меньшей мере одним датчиком расстояния. В частности, это помогает реализовать прямое электрическое подключение и/или питание датчика расстояния. Во время работы хирургическим светильником можно управлять напрямую в зависимости от управляющих сигналов с обеспечением уменьшения яркости или выключения соответствующих осветительных элементов или отдельных ламп, освещающих объект или оперирующего хирурга.
Кроме того, в сенсорный модуль предпочтительно встроен блок голосового управления для включения по меньшей мере одного датчика расстояния и/или управления хирургическим светильником по меньшей мере в одном рабочем состоянии. Кроме того, блок голосового управления, предпочтительно содержащий по меньшей мере один микрофон, то есть датчик звука, позволяет управлять отдельными лампами хирургического светильника в индивидуальном порядке. Кроме того, с использованием блока голосового управления могут быть реализованы многочисленные дополнительные функции, например для изменения отрегулированной высоты или наклона хирургического светильника могут быть выработаны управляющие сигналы. Таким образом, во время работы можно избежать прямого контакта оперирующего хирурга с хирургическим светильником.
В этом случае также целесообразно подключить блок голосового управления к вычислительному блоку или компьютерному блоку с использованием электронных средств. Таким образом, блок голосового управления используют непосредственно с уже имеющимся вычислительным блоком для оценки результатов измерений датчиков расстояния. Сенсорный модуль имеет относительно простую конструкцию, что позволяет снизить затраты на его производство.
Кроме того, настоящее изобретение содержит хирургический светильник, содержащий рукоятку согласно по меньшей мере одному из вышеописанных вариантов реализации, которая по меньшей мере частично присоединена с возможностью отсоединения к плафону хирургического светильника, что существенно упрощает возможность стерилизации рукоятки.
Кроме того, сенсорный модуль предпочтительно установлен с возможностью демонтажа на плафоне, так что в дальнейшем сенсорный модуль, при необходимости, может быть быстро извлечен из хирургического светильника после его закрепления в нем. Таким образом, хирургический светильник может быть оборудован в наиболее индивидуальном порядке.
В случае, когда вычислительный блок сенсорного модуля электрически соединен с центральным блоком управления хирургического светильника, управляющие сигналы могут быть переданы непосредственно от сенсорного модуля на хирургический светильник, что позволяет хирургическому светильнику напрямую настраивать свои отдельные лампы в индивидуальном порядке (в особенности их интенсивность освещения или яркость). Таким образом, хирургическим светильником управляют напрямую в максимально допустимой степени.
Таким образом, в соответствии с настоящим изобретением сенсорная система оборудована датчиками расстояния, размещенными в центральной ручке или рукоятке хирургического светильника. Сама центральная ручка может быть легко заменена, что позволяет существенно упростить и ускорить процесс оборудования хирургического светильник датчиками, даже в случае их замены. Существуют различные варианты ручек или рукояток, одна из которых не содержит датчиков, а другая содержит датчики (в соответствии с настоящим изобретением), которые в дальнейшем могут быть легко заменены. В другом варианте сенсорный модуль помещен в качестве промежуточного кольца между ручкой и плафоном. Таким образом, благодаря тому, что датчики и центральная ручка расположены по центру хирургического светильника, эти датчики имеют оптимальный «обзор» на головы оперирующих хирургов или пользователей. Датчики обнаруживают голову в качестве препятствия и обеспечивают гашение участков, расположенных позади этой головы. Датчики установлены на кольцеобразной печатной плате. Круглый или конический компонент (боковая стенка корпуса и/или полой части) выполнен светопроницаемым, то есть проницаемым для инфракрасного света.
Ниже настоящее изобретение подробно описано со ссылкой на чертежи, с помощью которых также описаны различные варианты реализации настоящего изобретения.
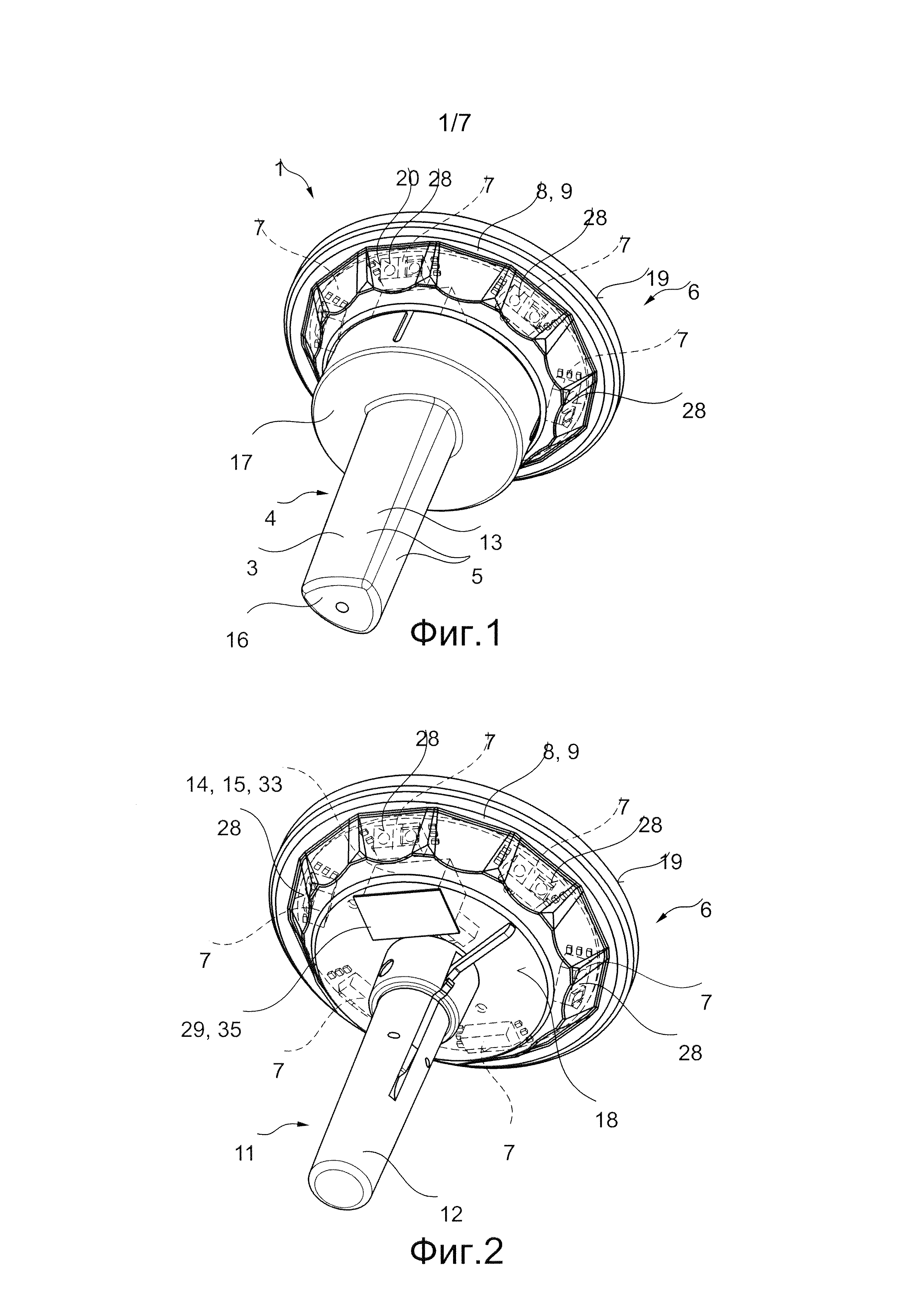
На фиг. 1 показан изометрический вид рукоятки согласно первому варианту реализации настоящего изобретения, на котором захват плотно присоединен к сенсорному модулю.
На фиг. 2 показан изометрический вид рукоятки по фиг. 1, иллюстрирующий только сенсорный модуль, при этом захват снят с принимающего стержня сенсорного модуля, а блок голосового управления расположен за наружной стенкой корпуса, показанной полупрозрачной.
На фиг. 3 показан изометрический вид части сенсорного модуля по фиг. 2, иллюстрирующий внутреннюю часть корпуса, в котором размещена плата, на которой установлены приемные датчики.
На фиг. 4 схематически показан вид сбоку рукоятки по фиг. 1, иллюстрирующий компоновку корпуса или сенсорного модуля и захвата.
На фиг. 5 показан вид сбоку хирургического светильника согласно первому предпочтительному варианту реализации настоящего изобретения, при этом рукоятка, схематически показанная на фиг. 4, установлена на плафоне хирургического светильника.
На фиг. 6 показан вид снизу хирургического светильника по фиг. 5, иллюстрирующий различные ламповые секторы в хирургическом светильнике, каждый из которых содержит несколько отдельных ламп и которые освещают область раны во время работы светильника.
На фиг. 7 схематически показан вид сбоку хирургического светильника, содержащего две разные рукоятки в снятом состоянии, при этом правая рукоятка из двух показанных рукояток представляет собой рукоятку согласно настоящему изобретению, показанную на фиг. 1 и 4, левая рукоятка из указанных двух рукояток представляет собой известную рукоятку, и обе рукоятки выполнены с возможностью их прикрепления к плафону хирургического светильника.
На фиг. 8 показан известный хирургический светильник, содержащий рукоятку без сенсорного модуля согласно настоящему изобретению.
На фиг. 9 схематически показан вид сбоку хирургического светильника по фиг. 5 и 6 согласно настоящему изобретению, иллюстрирующий рабочую область датчика расстояния сенсорного модуля, создаваемую при работе светильника, при этом в рабочей области датчика расстояния находится объект, а именно голова человека.
На фиг. 10 схематически показан вид сбоку сенсорного модуля, предназначенного для рукоятки согласно предпочтительному дополнительному варианту реализации, при этом сенсорный модуль в данном случае имеет кольцевую форму и не содержит принимающий стержень.
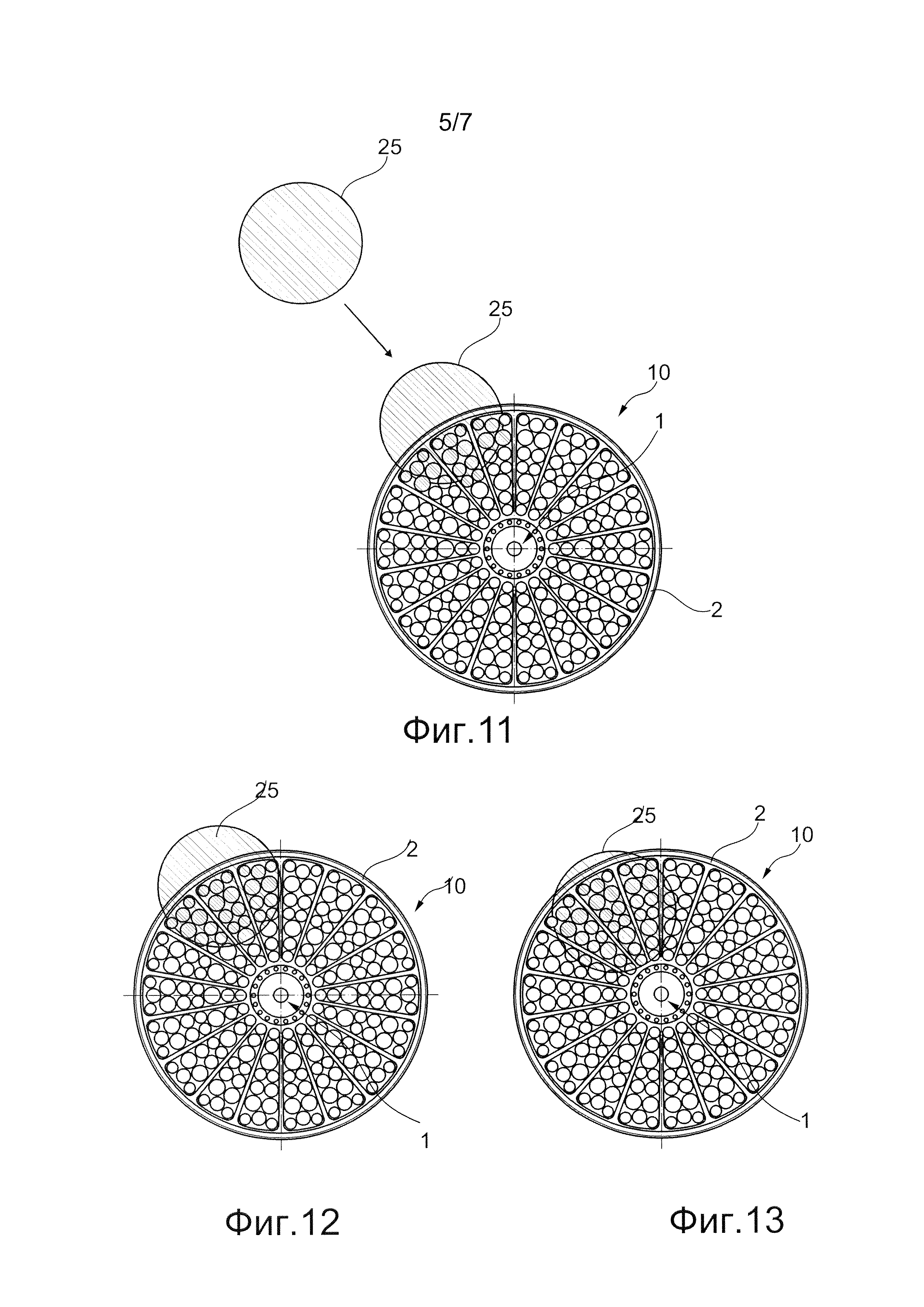
На фиг. 11 схематически показан вид снизу хирургического светильника согласно настоящему изобретению, иллюстрирующий, как и на фиг. 9, перемещение круглого объекта, указанное стрелкой, в пределах радиуса действия сенсорного модуля и, соответственно, его датчиков расстояния под пучки световых лучей отдельных ламповых секторов, после чего вследствие обнаружения положения объекта автоматически уменьшают яркость отдельных темных ламп ламповых секторов по меньшей мере одним датчиком расстояния с помощью вычислительного блока.
На фиг. 12 показан вид снизу хирургического светильника по фиг. 11, иллюстрирующий дальнейшее перемещение по направлению к центру или центральной рукоятке и выключение дополнительных отдельных ламп ламповых секторов по сравнению с фиг. 11.
На фиг. 13 снова показан вид снизу хирургического светильника по фиг. 11 и 12, иллюстрирующий в сравнении с фиг. 12 дальнейшее перемещение объекта по направлению к центру, то есть по направлению к рукоятке, с последующим гашением или выключением еще большего количества отдельных ламп хирургического светильника.
На фиг. 14 показана внутренняя сторона, то есть сторона, обращенная к внутренней стороне полой части платы сенсорного модуля, показанного на фиг. 3.
На фиг. 15 подробно показан изометрический вид платы, показанной на фиг. 14, в области двух соседних датчиков расстояния, при этом хорошо видны индикаторные лампы.
На фиг. 16 подробно показан изометрический вид платы рукоятки согласно еще одному предпочтительному варианту реализации, иллюстрирующий вычислительный блок.
На фиг. 17 показан изометрический вид рукоятки согласно еще одному предпочтительному варианту реализации, в которую вставлена плата, показанная на фиг. 16.
На фиг. 18 показан изометрический вид рукоятки согласно еще одному предпочтительному варианту реализации, в которую встроена видеокамера.
На фиг. 19 показан изометрический вид рукоятки по фиг. 18, в которой корпус сенсорного модуля уже не показан прозрачным.
Чертежи выполнены в схематической форме и предназначены исключительно для пояснения сущности настоящего изобретения. Схожие элементы снабжены одинаковыми ссылочными номерами. Кроме того, признаки различных вариантов реализации можно комбинировать друг с другом без каких-либо ограничений.
В первую очередь, на фиг. 1 показана рукоятка 1 в соответствии с предпочтительным первым вариантом реализации настоящего изобретения. Рукоятка 1 выполнена с возможностью сборки и/или с возможностью временного скрепления с хирургическим светильником 10, подробно описанным ниже согласно фиг. 5-9 и 11-13. Таким образом, настоящее изобретение относится не только к собственно рукоятке 1, но и к хирургическому светильнику 10, содержащему такую рукоятку 1.
Рукоятка 1 содержит захват 3, выполненный с возможностью установки на плафоне 2 хирургического светильника 10, при этом захват 3 также называется ручкой в целях простоты. Соответственно, захвату 3 приданы такие размеры, что в рабочем состоянии рукоятки 1, в котором она плотно присоединена к плафону 2 хирургического светильника 10, человек, например оперирующий хирург, может захватить его рукой для перемещения хирургического светильника 10 в необходимое положение. Хирургический светильник 10, подробно описанный ниже со ссылкой, например, на фиг. 5 и 6, дополнительно содержит несущую конструкцию (не описана в данном документе для упрощения изложения), которая присоединена к плафону 2 и с помощью которой плафон 2 может быть установлен в требуемое положение.
С внешней стороны 4 захвата 3 образована захватываемая поверхность 5, которой оперирующий хирург касается во время операции для изменения положения хирургического светильника 10. Сам захват 3 содержит стержневидную полую втулку 13, проходящую в продольном направлении. Поверхность 5 образована непосредственно на внешней периферийной стороне или внешней оболочке рукоятки. Захват 3 выполнен со своей внешней стороны 4 таким образом, что он имеет максимально гладкую поверхность или поверхность 5, которую можно легко стерилизовать. Другими словами, шероховатость поверхности 5 подбирают таким образом, чтобы она упрощала чистку с последующей стерилизацией и предотвращала улавливание частиц грязи.
Втулка 13 содержит крышку 16, защищающую и/или закрывающую внутреннюю часть втулки 13 от окружающий среды с торцевой стороны, которая при работе обращена в сторону от плафона 2. Таким образом, крышка 16 образует первую осевую торцевую область втулки 13 захвата 3. Втулка 13 соединена своей второй торцевой областью, противоположной первой торцевой стороне, с дискообразным расширением 17. Расширение 17 и втулка 13 выполнены из одного куска материала, то есть соединены друг с другом с образованием одного целого.
В свою очередь к захвату 3 присоединен сенсорный модуль 6 согласно настоящему изобретению. Сенсорный модуль 6 присоединен к захвату 3 с возможностью отсоединения. Сенсорный модуль 6 жестко присоединен к захвату 3 за счет трения. Сенсорный модуль 6, показанный на фиг. 2 в состоянии, в котором он снят с захвата 3, в свою очередь содержит корпус 8. Корпус 8 в свою очередь содержит дискообразную полую часть 9 и, соответственно, образован дискообразной полой частью 9. Дискообразная полая часть 9 является герметичной по отношению к окружающей среде. С одной стороны, полая часть 9 образована двумя стенками, расположенными на расстоянии друг от друга, а именно передней стенкой 18 и задней стенкой 19. С другой стороны, полая часть 9 имеет кольцевую боковую стенку 20, соединяющую переднюю стенку 18 с задней стенкой 19. Передняя стенка 18 является плоской стенкой полой части 9, которая при работе обращена к захвату 3, а задняя стенка 19 корпуса является плоской стенкой полой части 9, которая при работе обращена в сторону от захвата 3.
Кроме того, сенсорный модуль 6 помимо корпуса 8 содержит принимающую часть 11 рукоятки, плотно присоединенную к корпусу 8 или полой части 9. Принимающая часть 11 рукоятки плотно присоединена к передней стенке 18 полой части 9. Принимающая часть 11 рукоятки образует принимающий стержень 12, проходящий под прямым углом в сторону от передней стенки 18 полой части 9, проходящей в воображаемой плоскости расширения. Таким образом, продольная ось 32 принимающего стержня 12 проходит перпендикулярно передней стенке 18 и, соответственно, указанной воображаемой плоскости расширения.
Принимающий стержень 12 приспособлен по размерам к втулке 13 захвата 3, в результате чего он может быть вставлен во втулку 13. В собранном состоянии рукоятки 1, показанной на фиг. 1, принимающий стержень 12 плотно вставлен во втулку 13 за счет трения. Таким образом, захват 3 жестко присоединен к сенсорному модулю 6 за счет трения. Как показано на фиг. 4 в схематичном виде, расширение 17 в этом собранном состоянии находится на расстоянии от передней стенки 18 в осевом направлении принимающего стержня 12 (соответствующем осевому направлению продольной оси 32 и, соответственно, втулки 13).
На фиг. 3 показана внутренняя конструкция сенсорного модуля 6. Для наглядности, в сравнении с фиг. 2, на фиг. 3 не показаны корпус 8 или полая часть 9, что позволяет особенно четко рассмотреть электронный блок сенсорного модуля 6. В настоящем изобретении на дискообразной печатной плате 21 электронного блока размещены датчики 7 расстояния. Все датчики 7 расстояния имеют одинаковые конструктивное исполнение и функциональные возможности.
Датчики 7 расстояния выполнены в форме инфракрасных датчиков (также называемых инфракрасными датчиками расстояния). Каждый датчик 7 имеет по существу каплевидную или шарообразную рабочую область 24, в которой может быть обнаружен объект 25, такой как голова оперирующего хирурга. С этой целью инфракрасный излучатель 22 датчика 7 излучает инфракрасный свет, распространяющийся в пространстве по существу в форме воронки или конуса по воображаемой направляющей оси 26. Наряду с инфракрасным излучателем 22 датчик 7 расстояния также содержит инфракрасный приемник 23. Приемник 23 выполнен и сконфигурирован таким образом, что при нахождении объекта 25 в пределах рабочей области 24 он регистрирует путем измерения часть инфракрасного света, ранее излученного инфракрасным излучателем 22 и отраженного от объекта 25. Рабочая область 24 показана на фиг. 9, на которой рукоятка 1 уже закреплена на хирургическом светильнике 10. Таким образом, часть инфракрасного света, отраженного объектом 25, поступает на инфракрасный приемник 23, который преобразует отраженный инфракрасный свет в управляющий сигнал. В зависимости от расстояния от объекта 25 до датчика 7 расстояния или инфракрасного приемника 23 этот инфракрасный приемник 23 может регистрировать сигнал в момент времени до или после времени излучения инфракрасного света инфракрасным излучателем 22. Таким образом, расстояние между объектом 25 и рукояткой 1 может быть легко определено. Следовательно, рабочая область 24 ограничена профилем излученного инфракрасного света, а также радиусом действия инфракрасного приемника 23. Таким образом, каждый датчик 7 выполнен с возможностью обнаружения или определения положения объекта 25 в зоне между плафоном 2 и областью раны путем определения расстояния от объекта 25 до датчика 7 и, соответственно, сенсорного модуля 6.
Датчики 7 расстояния размещены на печатной плате 21 таким образом, что их рабочая область 24 своей направляющей осью 26 выровнена поперечно или под наклоном по отношению к продольной оси 32 принимающего стержня 12, в особенности предпочтительно смещена относительно продольной оси 32 приблизительно на 45°. Инфракрасный излучатель 22 и инфракрасный приемник 23 установлены или ориентированы в принимающей плоскости 27, ориентированной под прямым углом к направляющей оси 26.
В этом варианте реализации имеются шесть датчиков 7 расстояния, распределенных по существу по круговой воображаемой периферийной линии вокруг продольной оси принимающего стержня 12, однако в других вариантах реализации может быть выбрано и иное количество датчиков 7, например менее или более шести, предпочтительно семь, восемь, девять или по меньшей мере десять датчиков 7. На фиг. 14 еще раз схематически показано распределение датчиков 7, при этом для наглядности в вычислительном блоке 14 отсутствует микрофон 29. Датчики 7 установлены на равных расстояниях друг от друга по воображаемой периферийной линии по существу на одинаковом расстоянии от продольной оси 32 принимающего стержня 12. Датчики 7 установлены и ориентированы таким образом, что они выполнены с возможностью обнаружения, с использованием своих рабочих областей 24, положения объекта 25 по всему периметру, то есть в пределах углового диапазона 360° вокруг продольной оси 32.
Как показано на фиг. 1 и 2, боковая стенка 20 корпуса 8 выполнена таким образом, что она имеет несколько областей 28 крышки. Каждая область 28 крышки проходит с сужением параллельно принимающей плоскости 27 между передней стенкой 18 и задней стенкой 19. Круглая передняя стенка 18 имеет диаметр, который меньше диаметра задней стенки 19, имеющей такую же круглую форму. В этой конфигурации боковая стенка 10 выполнена из материала, проницаемого для измерительных сигналов датчиков 7 расстояния. Следовательно, боковая стенка 20 выполнена проницаемой для инфракрасного света. Поскольку конусообразный корпус 8 или конусообразная полая часть 9 выполнены полностью из одного и того же материала, то в целом они выполнены из проницаемого для инфракрасного света материала. Таким образом, помимо проницаемой для инфракрасного света боковой стенки 20 проницаемой для инфракрасного света также выполнена и передняя стенка 18. Следовательно, область 28 крышки, проходящая параллельно принимающей плоскости 27 датчика 7, связана с каждым датчиком 7 и по существу имеет такую же ширину, что и соответствующий датчик 7. Каждый датчик 7 дополнительно соединен с помощью электронных средств с вычислительным блоком 14, установленным на печатной плате 21. В частности, вычислительный блок 14 в рабочем состоянии, в котором он соединен с хирургическим светильником 10, выполнен с возможностью передачи управляющих сигналов в хирургический светильник 10 и, соответственно, в его (центральный) блок управления, который для упрощения повествования подробно не описан в данном документе, так что в зависимости от определенного положения объекта 25 обособленные или отдельные лампы 30 ламповых секторов 31 хирургического светильника 10, освещающие объект 25, могут быть притушены или выключены надлежащим образом.
Кроме того, в вычислительный блок 14, то есть в корпус 33 для электронных средств, в котором размещен вычислительный блок 14, встроен блок 15 голосового управления. Блок 15 в свою очередь электрически соединен с вычислительным блоком 14. Вследствие этого звуковые сигналы, зарегистрированные микрофоном 29 блока 15, могут быть преобразованы, посредством вычислительного блока 14, в подходящий управляющий сигнал, который в свою очередь может быть передан в центральный блок управления хирургического светильника 10 в состоянии, в котором он установлен на хирургическом светильнике 10. На фиг. 3 звукопроницаемое наружное покрытие микрофона 29 выступает во все стороны из корпуса 33 для электронных средств. Таким образом, хирургическим светильником 10 также можно управлять в индивидуальном порядке с использованием отдельных голосовых команд. Помимо управления яркостью и/или интенсивностью освещения соответствующих отдельных ламп 30 хирургического светильника 10, с использованием голосовых команд также можно изменять, например, положение хирургического светильника 10. Кроме того, блок 15 голосового управления содержит громкоговоритель.
Как показано на фиг. 2, передняя стенка 18 полой части 9 имеет подходящую выемку, в которую вставлена звукопроницаемая мембрана микрофона 29 или звукопроницаемая наружная крышка 35 микрофона 29. В результате это облегчает передачу звука через корпус 8 во внутреннюю часть.
Еще в одном варианте реализации вычислительный блок 14 присоединен к центральному блоку управления хирургического светильника 10 не проводным способом, а беспроводным способом, предпочтительно посредством беспроводной связи «Bluetooth».
На фиг. 5 и 6 особенно наглядно показан хирургический светильник 10 согласно настоящему изобретению, содержащий установленную рукоятку 1, показанную на фиг. 1-4. Хирургический светильник 10 содержит плафон 2, также называемый основным корпусом, в который вставлено несколько отдельных ламп 30. В этом варианте реализации отдельные лампы 30 объединены или сгруппированы с дополнительными отдельными лампами 30 для формирования различных ламповых секторов 31. В этой конфигурации хирургический светильник 10 содержит по существу дискообразный корпусной плафон 2, который в других конфигурациях может иметь и иные конструкции, а также может быть образован из нескольких частей, например из нескольких сегментов плафона. Ламповые секторы 31 (также называемые осветительными секторами) имеют каждый одинаковые особенности работы и управления, а также одинаковые конструкции.
Каждый ламповый сектор 31 содержит одинаковое количество отдельных ламп 30. Отдельные лампы 30 лампового сектора 31 могут иметь разные размеры и/или яркость, и/или интенсивность свечения и/или интенсивность освещения. Кроме того, отдельные лампы 30 могут обеспечивать разный цвет света. Каждый ламповый сектор 31 выполнен в форме куска торта, содержащего часть общего количества отдельных ламп 30, расположенных в форме диска вокруг центральной рукоятки 1. Каждая из отдельных ламп 30 содержит только один светодиод, тем не менее в других конфигурациях может содержать и несколько светодиодов. Каждая отдельная лампа 30 содержит линзу и/или систему оптических линз, связанных со светодиодом. Каждая из отдельных ламп 30 электрически соединена с центральным блоком управления хирургического светильника 10 с возможностью независимого управления в ответ на управляющие сигналы от центрального блока управления, в частности возможностью управления интенсивностью ее свечения и/или цветом ее свечения.
Как показано на фиг. 9 и 11-13, при работе хирургического светильника 10 область, освещенную отдельными лампами 30, отслеживают с использованием датчиков 7 расстояния. Отдельные датчики 7 предпочтительно имеют радиус действия в пределах более одного метра, предпочтительно более двух метров, в направлении направляющей оси 26. Таким образом, в результате перемещения объекта 25 в световой луч или пучок световых лучей отдельной лампы 30, показанной на фиг. 11-13, датчики 7 регистрируют расстояние между объектом 25 и сенсорным модулем 6, а вычислительный блок 14 в дальнейшем вырабатывает управляющий сигнал, что вызывает снижение яркости или выключение, посредством центрального блока управления, отдельных ламп 30 соответствующих ламповых секторов 31 (то есть отдельных ламп 30, освещающих непосредственно сам объект своими пучками световых лучей). В этом случае снижение яркости осуществляют в зависимости от расстояния по высоте между хирургическим светильником 10 и объектом 25. Как показано на фиг. 11-13, ламповые секторы 31, показанные на фиг. 13, могут быть выключены или притушены все вместе или отдельные лампы 30 ламповых секторов 31 могут быть выключены или притушены по-отдельности в зависимости от положения объекта 25 по отношению к рукоятке 1 или датчику 7 расстояния.
Для индикации, находится ли объект 25 в рабочей области 24 соответствующего датчика 7 расстояния, на печатной плате 21 для каждого датчика 7 дополнительно размещены индикаторные лампы 36, которые показаны на фиг. 15. При нахождении объекта 25 в рабочей области 24 соответствующего датчика 7 с уменьшением расстояния между датчиком 7 и объектом 25 происходит увеличение количества светящихся или включенных индикаторных ламп 36. В этой конфигурации для каждого датчика 7 имеется шесть индикаторных ламп 36. Каждая индикаторная лампа 36 выполнена в форме светодиода. Кроме того, имеется возможность переключения между различными индикаторными лампами 36, отличающимися своим цветом, в зависимости от расстояния между датчиком 7 и объектом 25.
Рукоятка 1 в своем установленном состоянии закреплена по центру плафона 2 таким образом, что продольная ось 32 расположена соосно воображаемой центральной оси плафона 2.
Кроме того, микрофон 29 имеет радиус действия по меньшей мере один метр, предпочтительно по меньшей мере два метра, что позволяет обнаруживать источники звука, вырабатывающие соответствующий управляющий звуковой сигнал, например сам объект 25, для надлежащего управления хирургическим светильником 10.
На фиг. 7 и 8 показана предпочтительная конструкция рукоятки 1, взаимодействующей с хирургическим светильником 10. Таким образом, можно просто заменить известную рукоятку 1', показанную на фиг. 8 и, соответственно, на фиг. 7 слева, рукояткой 1 согласно настоящему изобретению, показанной на фиг. 7 справа, путем открепления съемной части предыдущей рукоятки 1' от хирургического светильника 10 и прикрепления рукоятки 1 согласно настоящему изобретению к плафону 2. Для этой цели сенсорный модуль 6 образует съемную часть, присоединенную к плафону 2 на задней стенке 19 полой части 9 с возможностью отсоединения. Для этой цели полая часть 9 жестко присоединена к плафону 2 за счет трения, предпочтительно присоединена к плафону 2 посредством байонетного затвора с возможностью открепления или отсоединения. Хирургический светильник 10 и рукоятка 1 показаны в полностью закрепленном состоянии на фиг. 9. Кроме того, в сенсорный модуль 6 встроены средства видеозаписи, для наглядности подробно здесь не показанные, включающие по меньшей мере одну видеокамеру для записи изображения области раны и управляемые блоком 15 голосового управления.
На фиг. 16 и 17 схематически показан еще один вариант реализации рукоятки 1 согласно настоящему изобретению, в котором рукоятка 1 работает и выполнена в соответствии с первым вариантом реализации. В отличие от первого варианта реализации наружная крышка 35 микрофона 29 вставлена в каркас, образованный корпусом 33 для электронных средств, так что она особенно хорошо удерживается в корпусе 33. Как показано на фиг. 17, в корпусе 8 сенсорного модуля 6, а именно в его передней стенке 18, образована выемка 34, которая соответствует корпусу 33 и в которую со стороны наружной крышки 35 входит корпус 33.
На фиг. 18 и 19 показан еще один вариант реализации рукоятки 1 согласно настоящему изобретению, в котором рукоятка 1 работает и выполнена в соответствии с первым вариантом реализации. Однако в этом случае захват 3 имеет большую толщину. Это обусловлено тем, что в захвате 3 установлена видеокамера 37 для регистрации области раны. Видимым является наружное стекло линзы видеокамеры 37, при этом ось приема света видеокамеры 37 расположена концентрично по отношению к сквозному отверстию 38. Видеокамера 37 окружена захватываемой поверхностью 5, но в области крышки 16 она снабжена сквозным отверстием 38, через которое видеокамера 37 может снимать наружную сторону рукоятки 1.
На фиг. 10 показан еще один вариант реализации рукоятки 1 согласно настоящему изобретению, содержащий дополнительный сенсорный модуль 6, имеющий альтернативную конструкцию. Сенсорный модуль 6 состоит из вышеописанной дискообразной полой части 9 в форме промежуточного кольца, образующей корпус 8. В данном случае отсутствует принимающая часть 11 рукоятки, имеющая форму принимающего стержня 12. В этом варианте реализации рукоятка 1 присоединена непосредственно к корпусу 8 с возможностью отсоединения. Поэтому здесь также можно обеспечить наличие съемного сенсорного модуля 6. Его конструкция и функциональные возможности соответствуют сенсорному модулю 6 согласно первому варианту реализации.
Другими словами, рукоятка 1 выполнена в форме центральной ручки. В центральной ручке 1 хирургического светильника 10 установлены датчики, выполненные в форме датчиков 7 расстояния. В результате датчики 7 находятся в месте с оптимальным «обзором» (радиус обзора соответствует рабочей области 24) голов 25 пользователей. Датчики 7 обнаруживают голову 25 в качестве препятствия и обеспечивают уменьшение яркости части ламповых секторов 31, расположенных позади этой головы, и/или соответствующих одиночных ламп 30. Датчики 7 установлены на кольцеобразной печатной плате 21. Круглый или конический компонент, а именно боковая стенка 20, выполнен светопроницаемым (проницаемым для инфракрасного света).
Перечень ссылочных номеров
1 рукоятка
1' известная рукоятка
2 плафон
3 захват
4 внешняя сторона
5 захватываемая поверхность
6 сенсорный модуль
7 датчик расстояния
8 корпус
9 полая часть
10 хирургический светильник
11 принимающая часть рукоятки
12 принимающий стержень
13 втулка
14 вычислительный блок
15 блок голосового управления
16 крышка
17 расширение
18 передняя стенка
19 задняя стенка
20 боковая стенка
21 печатная плата
22 инфракрасный излучатель
23 инфракрасный приемник
24 рабочая область
25 объект
26 направляющая ось
27 принимающая плоскость
28 область крышки
29 микрофон
30 отдельная лампа
31 ламповый сектор
32 продольная ось
33 корпус для электронных средств
34 выемка
35 наружная крышка
36 индикаторная лампа
Реферат
Настоящее изобретение относится к рукоятке (1) для хирургического светильника (10), содержащей захват (3), предназначенный для прикрепления к плафону (2) хирургического светильника (10) и образующий захватываемую поверхность (5) на внешней стороне (4). Сенсорный модуль (6) присоединен с возможностью отсоединения к захвату (3) и содержит по меньшей мере один датчик (7) расстояния, выполненный с возможностью определения положения объекта. Кроме того, настоящее изобретение относится к хирургическому светильнику (10), содержащему предлагаемую рукоятку (1). 2 н. и 12 з.п. ф-лы, 19 ил.
Комментарии