Оптический считыватель, способ управления оптического считывателя и машиночитаемый носитель записи - RU2454020C1
Код документа: RU2454020C1
Чертежи















Описание
Раскрытие японской патентной заявки №2010-004902, поданной 13-го января 2010 г., включая описание, чертежи и формулы изобретения, включено в настоящий документ в своей целостности посредством ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к оптическому считывателю, который транспортирует носитель информации и оптически считывает этот носитель информации, к способу управления упомянутого оптического считывателя и к машиночитаемому носителю записи.
Предшествующий уровень техники
В целом, оптический считыватель, такой как устройство сканнера, которое соединено с главным компьютером, сохраняет изображение, получаемое путем считывания исходного документа, в буферную память и передает изображение, сохраненное в буферной памяти, в главный компьютер после полного считывания исходного документа (см. Патентный Документ 1, например, JP-A-2009-284191).
Так, транспортировка и считывание бумаги (носителя информации) для сканирования может быть выполнено в прямом и обратном направлениях, и в любом из этих случаев обеспечивается возможность обработки данных.
Тем не менее, в оптическом считывателе согласно предшествующему уровню техники необходимо, чтобы направление сканирования устанавливалось заранее с использованием управляющей команды независимо от текущего положения бумаги.
Например, в случае обратного направления сканирования, если посредством управляющей команды было установлено прямое направление сканирования, несмотря на то, что целевая позиция считывания располагается вблизи датчика считывания изображения (например, Контактного Датчика Изображения (CIS)), необходимо, чтобы до начала операции сканирования бумага была вытянута обратно на существенное расстояние, что излишне увеличивает время транспортировки бумаги, в результате чего снижается пропускная способность.
Сущность изобретения
Задачей, по меньшей мере, одного варианта осуществления настоящего изобретения является предоставление оптического считывателя, способа управления упомянутого оптического считывателя и машиночитаемого носителя записи, которые способны исключать излишнюю транспортировку бумаги (носителя информации) в течение операции подготовки сканирования или после операции сканирования, чтобы тем самым повысить пропускную способность.
Чтобы решить вышеописанные задачи, согласно первому аспекту осуществления настоящего изобретения предложен оптический считыватель, содержащий:
секцию транспортировки, способную транспортировать носитель информации, который является целью считывания, в прямом и обратном направлениях вдоль транспортного канала;
секцию оптического считывания, которая установлена в транспортном канале и оптически считывает носитель информации, который транспортируется посредством секции транспортировки; и
секцию управления, которая устанавливает направление транспортировки носителя информации во время считывания носителя информации на основании позиции носителя информации до или когда считывание носителя информации началось и позиции считывания секции оптического считывания таким образом, чтобы расстояние транспортировки носителя информации до завершения считывания носителя информации сокращалось, и которая управляет секцией транспортировки и секцией оптического считывания.
При такой конфигурации, секция управления устанавливает направление транспортировки во время считывания носителя информации до считывания секцией оптического считывания таким образом, чтобы расстояние транспортировки носителя информации до завершения считывания носителя информации сокращалось, транспортирует носитель информации, который является целевым носителем для считывания в прямом или обратном направлении вдоль транспортного канала посредством секции транспортировки, и оптически считывает носитель информации, транспортируемый посредством секции оптического считывания, посредством секции оптического считывания, в результате чего обеспечивается возможность исключения излишней транспортировки носителя информации в течение операции подготовки для оптического считывания носителя информации во время транспортировки носителя информации или после операции считывания, а также обеспечивается возможность повышения пропускной способности. Например, если носитель информации транспортируется в направлении, где позиция (целевая область считывания) носителя информации и позиция считывания секции оптического считывания становятся ближе друг к другу, то обеспечивается хороший уровень эффективности.
В упомянутом оптическом считывателе секция управления может установить направление транспортировки носителя информации на основании расположения позиций обоих краев целевой области считывания вдоль направления транспортировки носителя информации до или когда считывание носителя информации началось и позиции считывания секции оптического считывания.
При такой конфигурации направление транспортировки устанавливается на основании расположения позиций обоих краев вдоль направления транспортировки носителя информации, когда начинается считывание, и позиции считывания секции оптического считывания, и, следовательно, обеспечивается возможность надежно определять излишнюю транспортировку в течение операции подготовки для считывания носителя информации в течение транспортировки носителя информации или после операции считывания, а также обеспечивается возможность повышения пропускной способности. Например, если носитель информации транспортируется в направлении, где позиция целевой области считывания носителя информации и позиция считывания секции оптического считывания становятся ближе друг к другу, то обеспечивается хороший уровень эффективности.
В упомянутом оптическом считывателе секция оптического считывания может включать в себя первую секцию считывания, которая считывает одну поверхность носителя информации, и вторую секцию считывания, которая считывает другую поверхность носителя информации, причем первая секция считывания и вторая секция считывания расположены на обеих сторонах транспортного канала, и секция управления может установить направление транспортировки носителя информации таким образом, чтобы расстояние транспортировки носителя информации до полного считывания носителя первой секцией считывания и второй секцией считывания сокращалось, когда считывание обеих поверхностей носителя информации выполняется одновременно первой секцией считывания и второй секцией считывания. Соответственно, даже в том случае, когда обе поверхности носителя информации считываются вместе, обеспечивается возможность исключить излишнюю транспортировку носителя информации в течение операции подготовки для оптического считывания носителя во время транспортировки носителя информации или после операции считывания, а также обеспечивается возможность повышения пропускной способности. Например, если носитель информации транспортируется в направлении, где позиция (целевой области считывания) носителя информации и позиция считывания первой секции считывания или второй секции считывания становятся ближе друг к другу, то обеспечивается хороший уровень эффективности.
В упомянутом оптическом считывателе секция управления может определить позицию подготовки считывания в одном направлении, которое ближе к части края целевой области считывания носителя информации, из прямого и обратного направлений, в случае, когда целевая область считывания присутствует в позиции считывания носителя информации секции оптического считывания, и устанавливает направление транспортировки носителя информации на основании этой позиции подготовки считывания. Соответственно, даже в том случае, когда целевая область считывания присутствует в позиции считывания носителя информации секции оптического считывания, обеспечивается возможность надежного повышения пропускной способности. Например, если позиция подготовки считывания определяется в направлении, которое ближе к части края целевой области считывания, носитель информации временно перемещается в направлении ближе к позиции подготовки считывания и далее носитель считывается в течение транспортировки в обратном направлении, то обеспечивается хороший уровень пропускной способности.
В упомянутом оптическом считывателе секция управления может установить направление транспортировки носителя информации таким образом, чтобы оно совпадало с направлением вывода носителя информации, в том случае, когда направление вывода носителя информации определяется заблаговременно. Соответственно, даже в том случае, когда направление вывода определяется заранее, обеспечивается возможность надежного исключения излишней транспортировки носителя информации и повышения пропускной способности. Например, когда определяется, что носитель информации должен быть выведен из конкретного порта вывода в случае, где порт вывода носителя информации может быть предоставлен в двух местах на стороне передней поверхности и стороне задней поверхности оптического считывателя или в схожих случаях, если направление к конкретному порту вывода может быть использовано как направление транспортировки во время считывания, то обеспечивается хороший уровень пропускной способности. Сторона передней поверхности является стороной, которая расположена перед оператором, и, соответственно, с этой стороны осуществляется ввод, однако вывод носителя информации может быть выполнен как со стороны передней поверхности, так и со стороны задней поверхности, что определяется выбором оператора в зависимости от конкретных условий работы.
В упомянутом оптическом считывателе секция управления может устанавливать направление транспортировки таким образом, чтобы расстояние транспортировки при транспортировке носителя информации в направлении транспортировки было короче, чем расстояние транспортировки при транспортировке носителя информации в направлении, отличном от направления транспортировки.
Согласно второму аспекту вариантов осуществления настоящего изобретения предоставлен способ управления оптического считывателя, включающего в себя секцию транспортировки, способную транспортировать носитель информации, который является целью считывания, в прямом и обратном направлениях вдоль транспортного канала; и секцию оптического считывания, которая установлена в транспортном канале и которая оптически считывает носитель информации, транспортируемый секцией транспортировки, причем упомянутый способ содержит этапы, на которых:
устанавливают направление транспортировки носителя информации во время считывания носителя информации на основании позиции носителя информации до или когда считывание носителя информации началось и позиции считывания секции оптического считывания таким образом, чтобы расстояние транспортировки носителя информации до завершения считывания носителя информации сокращалось; и
управляют секцией транспортировки и секцией оптического считывания на основании упомянутого установленного направления транспортировки.
Путем выполнения вышеописанного способа управления направление транспортировки во время считывания носителя информации устанавливается так, чтобы сократить расстояние транспортировки носителя информации до завершения считывания носителя информации, на основании позиции носителя информации при начале считывания и позиции считывания секции оптического считывания, носитель информации, который является целью считывания, транспортируется в прямом или обратном направлении вдоль транспортного канала посредством секции транспортировки, и носитель информации, транспортируемый посредством секции транспортировки, оптически считывается посредством секции оптического считывания, и, таким образом, обеспечивается возможность исключения излишней транспортировки носителя информации в течение операции подготовки для оптического считывания носителя информации или после операции считывания, а также обеспечивается возможность повышения пропускной способности. Например, если носитель информации транспортируется в направлении, где позиция носителя информации и позиция считывания секции оптического считывания становятся ближе друг к другу, то обеспечивается хороший уровень эффективности.
В упомянутом способе управления оптического считывателя на этапе управления могут установить направление сканирования носителя информации на основании расположения позиций обоих краев целевой области считывания вдоль направления транспортировки носителя информации до или когда считывание носителя информации началось и позиции считывания секции оптического считывания.
Путем выполнения вышеописанного способа управления направление транспортировки устанавливается на основании расположения позиций обоих краев носителя информации вдоль направления транспортировки, когда начинается считывание, и позиции считывания секции оптического считывания, и, следовательно, обеспечивается возможность надежно определять излишнюю транспортировку носителя информации в течение операции подготовки для считывания носителя информации при транспортировке носителя информации или после операции считывания, а также обеспечивается возможность повышения пропускной способности. Например, если носитель информации транспортируется в направлении, где позиция целевой области считывания носителя информации и позиция считывания секции оптического считывания становятся ближе друг к другу, то обеспечивается хороший уровень эффективности.
В упомянутом способе управления оптического считывателя секция оптического считывания может включать в себя первую секцию считывания, которая считывает одну поверхность носителя информации, и вторую секцию считывания, которая считывает другую поверхность носителя информации, причем первая секция считывания и вторая секция считывания расположены на обеих сторонах транспортного канала, и на этапе управления могут установить направление транспортировки носителя информации таким образом, чтобы расстояние транспортировки носителя информации до полного считывания носителя первой секцией считывания и второй секцией считывания сокращалось, в случае, когда считывание обеих поверхностей носителя информации выполняется одновременно первой секцией считывания и второй секцией считывания. Соответственно, даже в том случае, когда обе поверхности носителя информации считываются вместе, обеспечивается возможность исключить излишнюю транспортировку носителя информации в течение операции подготовки для оптического считывания носителя во время транспортировки носителя информации или после операции считывания, а также обеспечивается возможность повышения пропускной способности. Например, если носитель информации транспортируется в направлении, где позиция (целевой области считывания) носителя информации и позиция считывания первой секции считывания или второй секции считывания становятся ближе друг к другу, то обеспечивается хороший уровень эффективности.
В упомянутом способе управления оптического считывателя на этапе управления могут определить позицию подготовки считывания в одном направлении, которое ближе к части края целевой области считывания носителя информации, из прямого и обратного направлений, в случае, когда целевая область считывания присутствует в позиции считывания носителя информации секции оптического считывания, и установить направление транспортировки носителя информации на основании этой позиции подготовки считывания. Соответственно, даже в том случае, когда целевая область считывания присутствует в позиции считывания носителя информации секции оптического считывания, обеспечивается возможность надежного повышения пропускной способности. Например, если позиция подготовки считывания определяется в направлении, которое ближе к части края целевой области считывания, носитель информации временно перемещается в направлении ближе к позиции подготовки считывания и далее носитель считывается в течение транспортировки в обратном направлении, то обеспечивается хороший уровень пропускной способности.
В упомянутом способе управления оптического считывателя на этапе управления могут установить направление транспортировки носителя информации таким образом, чтобы оно совпадало с направлением вывода носителя информации, в том случае, когда направление вывода носителя информации определяется заблаговременно. Соответственно, даже в том случае, когда направление вывода определяется заранее, обеспечивается возможность надежного исключения излишней транспортировки носителя информации и повышения пропускной способности. Например, когда определяется, что носитель информации должен быть выведен из конкретного порта вывода в случае, где порт вывода носителя информации может быть предоставлен в двух местах на стороне передней поверхности и стороне задней поверхности оптического считывателя или в схожих случаях, если направление к конкретному порту вывода может быть использовано как направление транспортировки во время считывания, то обеспечивается хороший уровень пропускной способности. Сторона передней поверхности является стороной, которая расположена перед оператором, и, соответственно, с этой стороны осуществляется ввод, однако вывод носителя информации может быть выполнен как со стороны передней поверхности, так и со стороны задней поверхности, что определяется выбором оператора в зависимости от конкретных условий работы.
В упомянутом способе управления оптического считывателя направление транспортировки может быть установлено таким образом, чтобы расстояние транспортировки при транспортировке носителя информации в направлении транспортировки было короче, чем расстояние транспортировки при транспортировке носителя информации в направлении, отличном от направления транспортировки.
Согласно третьему аспекту вариантов осуществления настоящего изобретения предоставлен машиночитаемый носитель, который хранит в себе программу, которая инструктирует секцию управления, управляющую оптическим считывателем, который включает в себя секцию транспортировки, способную транспортировать носитель информации, который является целью считывания, в прямом и обратном направлениях вдоль транспортного канала; и секцию оптического считывания, которая установлена в транспортном канале и которая оптически считывает носитель информации, транспортируемый секцией транспортировки, выполнять способ управления, содержащий этапы, на которых:
устанавливают направление транспортировки носителя информации во время считывания носителя информации на основании позиции носителя информации до или когда считывание носителя информации началось и позиции считывания секции оптического считывания таким образом, чтобы расстояние транспортировки носителя информации до завершения считывания носителя информации сокращалось;
управляют транспортной секцией так, чтобы транспортировать носитель информации на основании установленного направления транспортировки; и
управляют секцией оптического считывания так, чтобы оптически считывать носитель информации на основании установленного направления транспортировки.
Путем выполнения программы согласно упомянутому варианту осуществления посредством секции управления направление транспортировки во время считывания носителя информации устанавливается так, чтобы сократить расстояние транспортировки носителя информации до завершения считывания носителя информации, на основании позиции носителя информации при начале считывания и позиции считывания секции оптического считывания, носитель информации, который является целью считывания, транспортируется в прямом или обратном направлении вдоль транспортного канала посредством секции транспортировки, и носитель информации, транспортируемый посредством секции транспортировки, оптически считывается посредством секции оптического считывания, и, таким образом, обеспечивается возможность исключения излишней транспортировки носителя информации в течение операции подготовки для оптического считывания носителя информации или после операции считывания, а также обеспечивается возможность повышения пропускной способности. Например, если носитель информации транспортируется в одном направлении, где (один край) позиция целевой области считывания носителя информации и позиция считывания секции оптического считывания становятся ближе друг к другу, то обеспечивается хороший уровень эффективности.
Согласно вариантам осуществления настоящего изобретения предоставляется возможность исключения излишней транспортировки в течение операции подготовки для оптического считывания носителя информации при транспортировке носителя информации или после операции считывания, а также обеспечивается возможность повышения пропускной способности.
Краткое описание чертежей
На чертежах:
Фиг.1 изображает общий вид, иллюстрирующий внешний вид матричного контактного принтера согласно одному варианту осуществления;
Фиг.2 изображает общий вид, иллюстрирующий корпус принтера;
Фиг.3 изображает вид сечения сбоку корпуса принтера;
Фиг.4 изображает структурную схему, иллюстрирующую функциональную конфигурацию матричного контактного принтера;
Фиг.5A и 5B изображают схемы, иллюстрирующие пример носителя информации, который является целью считывания;
Фиг.6 изображает схему последовательности операций, иллюстрирующую процесс установки направления сканирования;
Фиг.7 изображает схему, иллюстрирующую процесс установки направления сканирования;
Фиг.8A, 8B и 8C изображают схемы, иллюстрирующие операцию считывания с использованием оптического считывателя;
Фиг.9A, 9B и 9C изображают схемы, иллюстрирующие операцию считывания с использованием оптического считывателя;
Фиг.10 изображает схему последовательности операций, иллюстрирующую работу матричного контактного принтера;
Фиг.11 изображает схему последовательности операций, иллюстрирующую работу матричного контактного принтера.
Подробное описание вариантов осуществления изобретения
Ниже, со ссылкой на прилагаемые чертежи, подробно описан вариант осуществления настоящего изобретения.
Фиг.1 изображает общий вид, иллюстрирующий внешний вид матричного контактного принтера согласно одному варианту осуществления настоящего изобретения. Фиг.2 изображает общий вид, иллюстрирующий корпус 11 принтера. Фиг.3 изображает вид сечения сбоку, иллюстрирующий матричный контактный принтер 10 с Фиг.1.
Матричный контактный принтер 10 (Фиг.1) прижимает множество записывающих проводов, входящих в состав записывающей головки 18 (см. Фиг.3), к носителю S записи, используя красящую ленту (не показана), выматываемую с кассеты с красящей лентой (не показана), и формирует точки на записываемой поверхности носителя S записи, чтобы, таким образом, записать изображение, включающее в себя знаки. Матричный контактный принтер 10 включает в себя оптический считыватель 110 (Фиг.3), и он также может служить как оптический считыватель для считывания знаков, символов, изображений и т.п. с поверхности носителя S записи.
В этом матричном контактном принтере 10 в качестве примера носителя S записи (носителя информации) может использоваться носитель определенной длины и непрерывный лист бумаги, в котором множество листов бумаги соединены друг с другом. Нарезанный носитель включает в себя, например, расчетную книжку, почтовую карточку, конверт и т.п., в добавление к нарезанной бумаге, нарезанной копировальной бумаге и т.п., а непрерывная бумага включает в себя непрерывную копировальную бумагу и бумагу, сложенную в веерообразной форме и соединенную посредством перфораций. В этом варианте осуществления в качестве носителя S записи используется чековая или платежная квитанция (далее упоминается как "чек"), выпускаемый финансовыми институтами и т.п., или расчетная книжка, выпускаемая финансовыми институтами и т.п. Чек представляет собой нарезанную бумагу, на которой в области MA, которая является частью нарезанной бумаги, посредством магнитных чернил нанесена информация MICR (Знаков, Напечатанных Магнитными Чернилами), такая как номер счета пользователя или серийный номер чека. Расчетная книжка представляет собой книжку, в которой множество листов бумаги скреплены друг с другом и внутренняя сторона которой служит как поверхность записи, когда книжка находится в открытом состоянии. В задней поверхности, соответствующей обложке книжки, располагается магнитная полоса.
Так, из четырех сторон прямоугольного носителя S записи сторона, которая вводится в матричный контактный принтер 10, обозначается как передний край, а противоположная сторона обозначается как задний край.
Как показано на Фиг.1, матричный контактный принтер 10 включает в себя верхнюю крышку 12, верхний корпус 13 и нижний корпус 14. Входной порт 15, через который вставляется и выводится носитель S записи, расположен на передней поверхности верхнего корпуса 13 и нижнего корпуса 14. С другой стороны, выходной порт 20, через который носитель S записи выводится, расположен на задней поверхности верхнего корпуса 13 и нижнего корпуса 14. Вывод носителя S записи, обрабатываемого матричным контактным принтером 10, через входной порт 15 или выходной порт 20 определяется командой, передаваемой на матричный контактный принтер 10 из главного компьютера 200, что описано ниже. Сторона, на которой расположен входной порт 15, то есть левая сторона на Фиг.3, обозначается как передняя сторона, а сторона, на которой расположен выходной порт 20, то есть правая сторона на Фиг.3, обозначается как задняя сторона.
Как показано на Фиг.2, матричный контактный принтер 10 включает в себя корпус 11 принтера, который заключен во внешний корпус. Корпус 11 принтера включает в себя нижний корпус 11A и верхний корпус (не показан), поддерживаемый осью 11C в задней конечной секции нижнего корпуса 11A. Верхний корпус может вращаться посредством открывающего/закрывающего рычага (не показан), установленного на поверхности левой стороны верхнего корпуса, и при открытии верхнего корпуса открывается доступ внутрь корпуса 11 принтера.
Как показано на Фиг.2 и 3, корпус 11 принтера включает в себя базовую раму 16, а также правую боковую раму 17A и левую боковую раму 17B, которые зафиксированы на обеих концевых секциях базовой рамы 16. Снаружи боковых рам 17A и 17B расположены боковые рамы (не показаны) верхнего корпуса, а между ними протягивается направляющий вал 31 каретки. Передняя направляющая 24 носителя и задняя направляющая 25 носителя, имеющие плоскую форму, неподвижно установлены между боковыми рамами 17A и 17B. Между передней направляющей 24 носителя и задней направляющей носителя 25 расположен плоский стол 21, над которым располагается записывающая головка 18, обращенная к столу 21.
Записывающая головка 18 установлена на каретке 19, которая соединена с направляющим валом 31 картриджа с возможностью скольжения. Каретка 19 приводится в движение посредством ремня (не показан) в результате прямого или обратного вращения мотора 56 привода каретки (Фиг.4) и выполняет возвратно-поступательные движения по направляющему валу 31 каретки. Каретка 19 перемещается взад и вперед между боковыми рамами верхнего корпуса в направлении знака X с Фиг.1, то есть в главном направлении сканирования, которое совпадает с направлением направляющего вала 31 каретки и направлением длины стола 21. Направление, которое перпендикулярно главному направлению X сканирования картриджа 19, то есть направление, указанное знаком Y на Фиг.1, обозначается как направление субсканирования.
В процессе перемещения вместе с кареткой 19 записывающая головка 18, установленная на каретке 19, позволяет записывающим проводам выступать из секции выступания проводов (не показана), обращенной к столу 21, в секции кончика записывающей головки 18 и ударять по красящей ленте, в результате чего чернила из красящей ленты переносятся на носитель S записи, транспортируемый между столом 21 и записывающей головкой 18, чтобы, таким образом, записать на носителе S записи изображение, включающее в себя знаки. Красящая лента наматывается и хранится в картридже с красящей лентой (не показан), который устанавливается в главной раме или каретке 19, и вытягивается в соответствии со сканирующим движением каретки 19. Кроме того, на задней стороне записывающей головки 18, над столом 21, расположен датчик 55 ширины носителя, как показано на Фиг.3. Датчик 55 ширины носителя установлен на каретке 19, чтобы сканировать стол 21 вместе с кареткой 19, и он используется для вычисления позиции бокового края носителя S записи или ширины носителя S записи.
Как показано на Фиг.2 и 3, стол 21 протягивается в направлении перемещения каретки 19 и имеет плоскую форму. Стол 21 прижимается в направлении записывающей головки 18, и он упругим образом поддерживается посредством прижимной пружины 180. Прижимная пружина 180 представляет собой спиральную пружину. Сила выступания записывающего провода во время операции записи записывающей головки 18 поддерживается силой прижима прижимной пружины 180. Сверх того, когда толщина носителя S записи меняется в процессе транспортировки носителя S записи или когда носитель S записи с отличной толщиной вставляется в корпус 11 принтера, кончик записывающей головки 18 надавливает на стол 21, противодействуя силе прижимной пружины 180, в результате чего стол 21 смещается от записывающей головки 18. Так, независимо от толщины носителя записи между кончиком записывающей головки 18 и записываемой поверхностью носителя S записи обеспечивается равномерный зазор.
Как показано на Фиг.3, корпус 11 принтера включает в себя механизм 100 транспортировки носителя (секцию транспортировки), который транспортирует носитель S записи, механизм 28 выравнивания, который упирается в передний край носителя S записи, транспортируемого механизмом 100 транспортировки носителя, чтобы выровнять носитель S записи, секцию 29 записи/чтения магнитных данных, которая включает в себя магнитную головку 34, которая выполняет считывание информации MICR, предоставленной в чеке, или выполняет считывание или запись магнитной информации на магнитной полосе, предоставленной в расчетной книжке, и секцию 30 прижима носителя, которая прижимает носитель S записи сверху, чтобы управлять приподниманием носителя S записи, когда магнитная головка 34 секции 29 записи магнитных данных выполняет обработку магнитной информации, включающую в себя считывание информации MICR.
Как показано на Фиг.2 и 3, механизм 100 транспортировки носителя включает в себя стол 21, первый ведущий ролик 22A, первый ведомый ролик 22B, второй ведущий ролик 23A, второй ведомый ролик 23B, третий ведущий ролик 124A, третий ведомый ролик 124B, переднюю направляющую 24 носителя, заднюю направляющую 25 носителя, мотор 26 транспортировки носителя и секцию 27 ведущего механизма. Механизм 100 транспортировки носителя формирует транспортный канал P, который транспортирует носитель S записи через каждый ролик по передней направляющей 24 носителя и задней направляющей 25 носителя, а верхние поверхности передней направляющей 24 носителя и задней направляющей 25 носителя формируют транспортную поверхность PA транспортного канала P.
В этой конфигурации, первый ведущий ролик 22A и первый ведомый ролик 22B располагаются на передней стороне корпуса 11 принтера относительно стола 21 и записывающей головки 18, а второй ведущий ролик 23A, второй ведомый ролик 23B, третий ведущий ролик 124A и третий ведомый ролик 124B последовательно располагаются на задней стороне корпуса 11 принтера относительно стола 21 и записывающей головки 18.
Первый ведущий ролик 22A и первый ведомый ролик 22B расположены вертикально, формируя пару, второй ведущий ролик 23A и второй ведомый ролик 23B расположены вертикально, формируя пару, третий ведущий ролик 124A и третий ведомый ролик 124B расположены вертикально, формируя пару.
Первый ведущий ролик 22A, второй ведущий ролик 23A и третий ведущий ролик 124A представляют собой ведущие ролики, которые приводятся во вращение посредством мотора 26 транспортировки носителя и секцией 27 ведущего механизма, а первый ведомый ролик 22B, второй ведомый ролик 23B и третий ведомый ролик 124B представляют собой ведомые ролики, которые с предопределенным усилием упругим образом прижимаются пружинами 42A, 42B и 42C к первому ведущему ролику 22A, второму ведущему ролику 23A и третьему ведущему ролику 124A соответственно. Таким образом, первый ведущий ролик 22A и первый ведомый ролик 22B вращаются в противоположных направлениях, второй ведущий ролик 23A и второй ведомый ролик 23B вращаются в противоположных направлениях, третий ведущий ролик 124A и третий ведомый ролик 124B вращаются в противоположных направлениях.
Как показано на Фиг.2, секция 27 ведущего механизма расположена снаружи правой боковой рамы 17A. Секция 27 ведущего механизма включает в себя шестерню 51 мотора, которая прикреплена и вращается вместе с ведущим валом мотора 26 транспортировки носителя, который может вращаться в прямом или обратном направлении. Движущая сила от шестерни 51 мотора передается на вторую ведущую шестерню 53B, установленную на втором вале 33 второго ведущего ролика 23A, через понижающую передачу 52, и передается на первую ведущую шестерню 53A, которая установлена на первом вале 32 первого ведущего ролика 22A, через промежуточную шестерню 54 со второй ведущей шестерни 53B. Сверх того, крутящий момент второго вала 33 второго ведущего ролика 23A передается на третий вал 134 третьего ведущего ролика 124A посредством приводного ремня (не показан), например. Таким образом, первый ведущий ролик 22A, второй ведущий ролик 23A и третий ведущий ролик 124A, показанные на Фиг.3, вращаются в одном и том же направлении, чтобы транспортировать носитель S записи в корпус 11 принтера. То есть, первый ведущий ролик 22A, второй ведущий ролик 23A и третий ведущий ролик 124A, показанные на Фиг.3, транспортируют носитель S записи в корпус 11 принтера, как показано посредством знака A вдоль направления Y субсканирования, когда мотор 26 транспортировки носителя вращается в прямом направлении, и транспортируют носитель S записи в направлении вывода из корпуса 11 принтера, указанном посредством знака B, когда мотор 26 транспортировки носителя вращается в обратном направлении.
Механизм 28 выравнивания выравнивает носитель S записи до выполнения записи с использованием записывающей головки 18 или до считывания поверхности носителя S записи с использованием оптического считывателя 110. Механизм 28 выравнивания включает в себя множество выравнивающих пластин, которые располагаются между первым ведущим роликом 22A и первым ведомым роликом 22B, а также между записывающей головкой 18 и столом 21 в главном направлении сканирования, и выравнивающий мотор 58 (Фиг.4), который приводит в движение выравнивающие пластины 38. Сверх того, выравнивающий механизм 28 позволяет этим выравнивающим пластинам 38 упираться в передний край носителя S записи, чтобы, таким образом, выравнивать направление носителя S записи.
Как показано на Фиг.2, корпус 11 принтера включает в себя множество датчиков 39 выравнивания, которые обнаруживают присутствие или отсутствие носителя S записи, упирающегося в выравнивающие пластины 38 на стороне выше по ходу относительно выравнивающих пластин 38 в транспортном канале P. Выравнивающие датчики 39 представляют собой световые датчики, которые включают в себя секцию излучения света (СИД и т.п.) и секцию приема света (фототранзистор и т.п.), которые расположены против друг друга, параллельно главному направлению сканирования, причем транспортный канал P располагается между ними. Можно определить, находится ли наклон носителя S записи относительно направления транспортировки в допустимом диапазоне после выравнивания посредством выравнивающего механизма 28, на основе количества и расположения датчиков, которые обнаруживают передний край носителя S записи, из всего множества датчиков 39 выравнивания.
Кроме того, матричный контактный принтер 10 включает в себя секцию платы управления (не показана), предоставленную под задней стороной корпуса 11 принтера, такую как, например, секция управления, которая управляет матричным контактным принтером 10, то есть выполняет управление приводом мотора 26 транспортировки носителя, управление перемещением каретки 19, управление операцией записи записывающей головки 18, управление операцией считывания оптического считывателя 110 и т.п.
В корпусе 11 принтера, на передней стороне первого ведущего ролика 22A на одной линии расположены множество датчиков 47 края носителя, которые обнаруживают вставку носителя S записи в транспортный канал P. Датчики 47 края носителя представляют собой светоотражающие датчики, включающие в себя секцию излучения света, которая излучает свет на транспортный канал P, и секцию приема света, которая обнаруживает отраженный свет и обнаруживает носитель S записи, вставленный через входной порт 15. Датчики 47 края носителя могут представлять собой светопропускающие датчики, которые включают в себя секцию излучения света и секцию приема света, расположенные против друг друга с транспортным каналом P между ними. В этой конфигурации, когда прием света блокируется в каком-либо одном из датчиков 47 края носителя в секции приема света всех датчиков 47 края носителя, определяется, что носитель S записи вставлен через транспортный канал P.
Сверх того, как показано на Фиг.3, корпус 11 принтера включает в себя оптический считыватель (секцию оптического считывания), которая считывает символ, знак, изображения и т.п., нанесенные на поверхность носителя S записи. Оптический считыватель 110 включает в себя первый сканнер (первую секцию считывания) 111, который считывает информацию, нанесенную путем печати и т.п. на сторону верхней поверхности носителя S записи, и второй сканнер (вторую секцию считывания) 112, который расположен напротив первого сканнера 111 и считывает информацию, нанесенную путем печати и т.п. на сторону нижней поверхности носителя S записи. Обычно, носитель S записи вставляется через входной порт 15, так что поверхность, на которой напечатана информация MICR, становится нижней поверхностью.
Первый сканнер 111 и второй сканнер 112 представляют собой датчики оптических изображений, которые непрерывно считывают информацию с носителя S записи, который транспортируется по транспортному каналу P и который располагается между вторым ведущим роликом 23A и третьим ведущим роликом 124A.
Первый сканнер 111 и второй сканнер 112 представляют собой, например, датчики считывания изображения типа CIS (контактный датчик изображения), которые, соответственно, включают в себя плоские покровные стекла 140 и 150, которые входят в тесный контакт с носителем S записи, и корпусы 141 и 151, которые удерживают покровные стекла 140 и 150. Внутри корпусов 141 и 151, соответственно, располагается секция излучения света (не показана), которая излучает свет из источника, такого как СИД, на область считывания носителя S записи, множество датчиков приема света (не показаны), которые расположены на одной линии в главном направлении сканирования (направлении X), и секцию вывода (не показана), которая выводит сигнал из датчика приема света в секцию платы управления. В этом варианте осуществления первый сканнер 111 и второй сканнер 112 могут включать в себя CCD (прибор с зарядовой связью) вместо CIS. Сверх того, как показано на Фиг.2, второй сканнер 112 включает в себя корпус 151 и покровное стекло 150, которое протягивается в направлении ширины матричного контактного принтера 10 почти параллельно столу 21 и имеет продолговатую форму. Корпус 151 расположен так, что верхняя поверхность (поверхность стекла) покровного стекла 150 открывается к транспортному каналу P через отверстие, сформированное в задней направляющей 25 носителя. Как показано на Фиг.3, первый сканнер 111 расположен над вторым сканнером 112 таким образом, что нижняя поверхность (поверхность стекла) покровного стекла 140 обращена к верхней поверхности покровного стекла 150, и имеет продолговатую форму приблизительно такой же длины, что и второй сканнер 112 в направлении ширины.
Прижимной элемент 113 расположен над первым сканнером 111, и первый сканнер 111 прижимается к носителю S записи. Сверх того, прижимной элемент 113 прижимает первый сканнер 111 в сторону второго сканнера 112 с приблизительной одинаковой силой по всей ширине. Сверх того, в прижимном элементе 113 может использоваться спиральная пружина, пластинчатая пружина или амортизирующий элемент из эластомера и т.п. Между покровными стеклами 140 и 150 обеспечивается зазор, в который может быть вставлен носитель записи с предопределенной толщиной. Когда носитель S записи считывается, первый сканнер 111 сдвигается вверх транспортируемым носителем S записи и прижимной элемент 113 сжимается, так что носитель S записи может пройти между покровными стеклами 140 и 150. То есть, в оптическом считывателе 110 носитель S записи прижимается в сторону второго сканнера 112, поскольку первый сканнер прижимается прижимным элементом 113, и, соответственно, носитель S записи и поверхности покровных стекол 140 и 150 плотно прилегают друг к другу, тем самым повышая качество считывания.
Датчики приема света (не показаны) первого сканнера 111 и второго сканнера 112 расположены на одной линии в главном направлении сканирования матричного контактного принтера 10, и они выполняют считывание по линии, проходящей в главном направлении сканирования. Датчики приема света первого сканнера 111 и второго сканнера 112 расположены в диапазоне, который больше диапазона, в котором записывающая головка 18 способна печатать в главном направлении сканирования, так что считывание может быть выполнено по ширине, которая больше ширин всех носителей записи, которые могут быть распечатаны посредством матричного контактного принтера 10. То есть, оптический считыватель 110 может выполнять считывание всех поверхностей всех носителей S записи, используемых в упомянутом матричном контактном принтере 10.
Как показано на Фиг.3, первый сканнер 111 и второй сканнер 112 расположены против друг друга, а транспортный канал P располагается между ними. Датчик приема света в форме линии, входящий в состав первого сканнера 111, и датчик приема света в форме линии, входящий в состав второго сканнера 112, смещены на 5 мм в направлении транспортировки носителя S записи. При такой конфигурации обеспечивается возможность исключить воздействие на другой датчик приема света и достичь более высокого качества сканирования.
Первый сканнер 111 и второй сканнер 112 включают в себя источники R, G и B света, соответственно, и могут выполнять монохроматическое считывание (двухцветное, 16 оттенков, 256 оттенков) и цветное считывание. Сверх того, разрешение считывания первого сканнера 111 и второго сканнера 112 может быть установлено, например, в одно из следующих значений: 200 точек на дюйм, 300 точек на дюйм и 600 точек на дюйм. Количество линий считывания в направлении транспортировки (направлении Y субсканирования) носителя S записи устанавливается согласно разрешению считывания в главном направлении считывания, а скорость транспортировки носителя S записи в течение считывания регулируется согласно условиям, таким как разрешение сканирования, скорость обработки обнаруживаемой величины датчика приема света и т.п.
Фиг.4 изображает структурную схему, иллюстрирующую конфигурацию системы управления матричного контактного принтера 10.
Соответствующие секции, показанные на Фиг.4, реализованы посредством сочетания программного обеспечения и аппаратного обеспечения, установленного на плате управления (не показана).
Матричный контактный принтер 10 включает в себя ЦП 40, который представляет собой секцию управления, которая управляет всем матричным контактным принтером 10 на основании управляющей программы, ОЗУ 41, которое временно хранит управляющие программы, данные и т.п., считанные из ЭСППЗУ 42 посредством ЦП 40, ЭСППЗУ 42, которое хранит управляющую программу, выполняемую посредством ЦП 40, обработанные данные и т.п., интерфейс 43, который преобразует формат данных, когда информация передается или принимается из главного компьютера 200, который управляет матричным контактным принтером 10, вентильную матрицу 45, которая соединена с датчиками разных типов, схему 46 привода мотора, которая приводит в действие различные моторы, и схему 48 привода головки, которая приводит в действие головку, причем соответствующие секции соединены друг с другом посредством шины 49.
ОЗУ 41 выполняет роль секции временного хранения и формирует буфер изображения (не показан), который хранит данные изображения, считанного оптическим считывателем 110.
Датчик 39 выравнивания, датчик 47 края носителя, датчик 55 ширины носителя, первый сканнер 111 и второй сканнер 112 соединены с вентильной матрицей 45. Вентильная матрица 45 квантует аналоговый ввод напряжения из датчика 39 выравнивания, датчика 47 края носителя и датчика 55 ширины носителя в цифровые данные и выводит их в ЦП 40. Первый сканнер 111 и второй сканнер 112 оптически считывают поверхность носителя S записи, используя CIS, и подают обнаруженное напряжение CIS на вентильную матрицу 45 для каждого пикселя CIS. Вентильная матрица 45 квантует аналоговое напряжение, подаваемое с первого сканнера 111 и второго сканнера 112 в цифровые данные, и выводит их в ЦП 40.
Схема 46 привода мотора соединена с мотором 26 транспортировки носителя, мотором 56 привода каретки, мотором 57 привода магнитной головки и выравнивающим мотором 58, и она подает управляющие токи или управляющие импульсы на соответствующие моторы, приводя их в действие. Выравнивающий мотор (Фиг.4), который приводит в действие выравнивающие пластины 38 (Фиг.3) и т.п., может быть соединен со схемой 46 привода мотора.
Схема 48 привода головки соединена с записывающей головкой 18 и магнитной головкой 34, и она обеспечивает вывод записывающего провода путем применения управляющих токов к записывающей головке 18. Сверх того, датчик 47 края носителя обнаруживает напряжение (аналоговое напряжение) магнитной головки 34 и выводит это напряжение в ЦП 40 как цифровые данные, в случае когда управляющие токи чтения/записи выводятся на магнитную головку 34, чтобы выполнить считывание магнитных данных.
ЦП 40 получает состояния обнаружения различных датчиков, используя вентильную матрицу 45, схему 46 привода мотора и схему 48 привода головки, на основании управляющей программы, хранимой в ЭСППЗУ 42, приводит в действие соответствующие моторы, чтобы транспортировать носитель S записи и приводит в действие соответствующие головки, чтобы, таким образом, выполнить запись на носителе S записи. Сверх того, ЦП 40 транспортирует носитель S записи, используя механизм 100 транспортировки носителя, и считывает поверхность носителя S записи, используя первый сканнер 111 и второй сканнер 112 посредством вентильной матрицы 45. В течение считывания ЦП 40 последовательно и временно сохраняет данные, вводимые из вентильной матрицы 45, в буферной памяти (не показана), установленной в ОЗУ 41. Кроме того, ЦП 40 считывает данные изображения, хранимые в буферной памяти (не показана) и далее передает считанные данные изображения в главный компьютер 200, используя интерфейс 43.
Фиг.5A и 5B изображают схемы, иллюстрирующие чек в качестве конкретного примера носителя S записи, обрабатываемого посредством матричного контактного принтера 10. Фиг.5A изображает переднюю поверхность, а Фиг.5B изображает заднюю поверхность.
Носитель S записи в форме чека имеет продолговатую прямоугольную форму, причем длинная сторона вставляется в матричный контактный принтер 10 как передняя сторона, и чек транспортируется в направлении короткой стороны, как показано посредством стрелки на фигуре. Так, длина (ширина) в направлении длинной стороны носителя S записи равна Lx, а длина (высота) в направлении короткой стороны равна Ly.
Как показано на Фиг.5A, на передней стороне носителя S записи предусмотрены секции, в которых записываются или печатаются дата издания, сумма денег, адресат, адрес и имя владельца счета, подпись и т.п., а знаки MICR печатаются в нижней левой области MA. Сверх того, как показано на Фиг.5B, серийный номер чека печатается на задней поверхности носителя S записи, и на задней поверхности также предоставлены секции, в которых записываются или печатаются название финансового института, номер счета и т.п. Кроме того, на задней поверхности носителя S записи может быть напечатан серийный номер чека.
Носитель S записи с Фиг.5A и 5B вставляется с входного порта 15, так что задняя поверхность с Фиг.5A обращена вверх в матричном контактном принтере 10, а задняя поверхность с Фиг.5B обращена вниз. Передняя поверхность с Фиг.5A соответствует верхней поверхности, и она считывается первым сканнером 111. Задняя поверхность с Фиг.5B соответствует нижней поверхности, и она считывается вторым сканнером 112.
В зависимости от размера носителя S записи диапазон R считывания первого сканнера 111 устанавливается немного большим, чем ширина Lx и высота Ly носителя S записи, как показано посредством пунктирной линии с Фиг.5A. Ширина и высота диапазона R считывания получаются путем прибавления резервного поля к ширине Lx и высоте Ly носителя S записи, причем размер резервного поля составляет, например, приблизительно несколько миллиметров. Таким образом, первый сканнер 111 может оптически считать всю поверхность передней стороны носителя S записи. Сверх того, магнитная головка 34 считывает знаки MICR области MA с Фиг.5A.
Аналогично, в зависимости от размера носителя S записи диапазон R считывания второго сканнера 112 устанавливается немного большим, чем ширина Lx и высота Ly носителя S записи, как показано посредством пунктирной линии с Фиг.5B. В этом варианте осуществления, ширина и высота диапазона R считывания второго сканнера 112 имеют такую же величину, что и для диапазона R считывания первого сканнера 111, и они получаются путем прибавления резервной полосы к ширине Lx и Ly носителя S записи. Таким образом, второй сканнер 112 может оптическим образом считать всю поверхность задней стороны носителя S записи.
Матричный контактный принтер 10 считывает носитель S записи, используя оптический считыватель 110, одновременно транспортируя носитель S записи в прямом направлении или обратном направлении вдоль его короткой стороны. В этом случае, направление транспортировки во время считывания автоматически определяется, как описано ниже, так что целевая часть считывания полностью считывается при наикратчайшем расстоянии транспортировки.
Из главного компьютера 200 через интерфейс 43 в матричный контактный принтер 10 передается команда, и размер (Lx, Ly) носителя S записи задается этой командой. ЦП 40 устанавливает размер носителя S записи на основании команды, принятой из главного компьютера 200, и устанавливает диапазон R считывания. Так, команда, переданная из главного компьютера 200, включает в себя информацию, указывающую позицию области MA на носителе S записи. Позиция области MA задается, например, посредством расстояния Dx от короткой стороны носителя S записи и расстояния Dy от длинной стороны носителя S записи. На основании этой команды ЦП 40 управляет схемой 46 привода мотора и схемой 48 привода головки, приводит в действие мотор 57 привода магнитной головки и выполняет считывание, используя магнитную головку 34.
Команда, переданная на матричный контактный принтер 10 из главного компьютера 200, включает в себя команду настройки, команду начала сканирования (считывания) и команду вывода бумаги. Команда настройки задает в оптическом считывателе 110 разрешение считывания, необходимость считывания для каждой поверхности (верхней поверхности и нижней поверхности), направление сканирования, тип цвета (цветное сканирование или монохроматическое сканирование), градацию в случае монохроматического сканирования, цвет излучения света СИД-ом в случае монохроматического сканирования, целевую область сканирования (позицию начала и позицию конца области) в случае, если считывается только часть диапазона R считывания, и т.п. Так, координаты позиции начала и позиции конца в области выражаются как координаты, используя левый конец переднего края диапазона R считывания в качестве исходной точки O. ЦП 40, который принимает команду настройки, получает величину, заданную этой командой настройки, как величину настройки.
Команда начала сканирования подает инструкцию начала операции считывания в матричный контактный принтер 10. Команда начала сканирования включает в себя информацию, определяющую весь диапазон R считывания, или определенную область считывания (частичное считывание) только целевой области, определенной командой настройки. ЦП 40, который принимает команду начала сканирования, управляет вентильной матрицей 45 и схемой 46 привода мотора, чтобы, таким образом, начать считывание, используя оптический считыватель 110.
Кроме того, команда вывода бумаги подает инструкцию вывода носителя S записи через входной порт 15 или выходной порт 20 после завершения считывания, и она включает в себя информацию, инструктирующую вывод бумаги, и информацию направления вывода бумаги (входной порт 15 или выходной порт 20). ЦП 40, который принимает команду вывода бумаги, выводит носитель S записи со стороны, определенной упомянутой командой вывода бумаги.
Ниже описан процесс установки направления сканирования, выполняемый до операции сканирования.
Фиг.6 изображает схему последовательности операций, иллюстрирующую процесс установки направления сканирования.
Сканирование в прямом направлении обозначает сканирование, при котором носитель S записи транспортируется в направлении выходного порта 20 (прямое направление в направлении транспортировки), а сканирование в обратном направлении обозначает сканирование, при котором носитель S записи транспортируется в направлении входного порта 15 (обратное направление в направлении транспортировки).
Во-первых, определяется, установлено ли направление сканирования в режим автоматического выбора направления (этап S11).
В определении на этапе S11, если направление сканирования не установлено в режим автоматического выбора направления (этап S11; Нет), то направление сканирования устанавливается в значение назначенного направления, и процесс установки направления сканирования завершается (этап S12).
В определении на этапе S11, если направление сканирования установлено в режим автоматического выбора направления (этап S11; Да), то определяется, установлена ли опция "вывод бумаги после сканирования действителен", так что после сканирования выполняется процесс вывода бумаги (этап S13).
В определении на этапе S13, если установлена опция "вывод бумаги после сканирования действителен" (этап S13; Да), поскольку направление сканирования определяется в направлении вывода бумаги, то определяется, является ли направление вывода бумаги направлением выходного порта 20 (направлением назад) (этап S14).
В определении на этапе S14, если направление вывода бумаги является направлением выходного порта 20 (направлением назад) (этап S14; Да) и если направление сканирования соответствует прямому направлению, то, поскольку вывод бумаги выполняется в направлении выходного порта 20 (направлении назад), направление сканирования устанавливается в значение прямого направления и процесс установки направления сканирования завершается (этап S15).
В определении на этапе S14, если направление вывода бумаги не является направлением выходного порта 20 (направлением назад), то есть если направление вывода бумаги соответствует направлению входного порта 15 (направлению вперед) (этап S14; Нет), и если направлением сканирования является обратное направление, то, поскольку вывод бумаги может быть выполнен в направлении входного порта 15 (направлении вперед), направление сканирования устанавливается в значение обратного направления и процесс установки направления сканирования завершается (этап S16).
С другой стороны, в определении на этапе S13, если опция "вывод бумаги после сканирования действителен" не установлена (этап S13; Нет), то определяется, обнаружен ли полностью задний край бумаги посредством датчика 47 края носителя (этап S17).
В определении на этапе S17, если задний край бумаги еще не обнаружен датчиком 47 края носителя (этап S17; Нет), необходимо снова выполнить процесс обнаружения заднего края, чтобы выполнить сканирование в обратном направлении, что приведет к выполнению бесполезной операции. Так, направление сканирования устанавливается в значение прямого направления, и процесс установки направления сканирования завершается (этап S18).
Фиг.7 изображает схему, иллюстрирующую процесс установки направления сканирования.
В этом случае направление сканирования устанавливается в значение направления транспортировки на основании позиции носителя S записи до или в начале считывания или позиций считывания (SPU и SPL) первого сканнера 111 и второго сканнера 112, которые представляют собой секции оптического считывания, так что расстояние транспортировки носителя S записи до завершения считывания носителя S записи сокращается. То есть, направление транспортировки носителя S записи устанавливается так, чтобы расстояние транспортировки до завершения считывания носителя S записи, когда носитель S записи транспортируется в направлении транспортировки, было меньше расстояния транспортировки носителя S записи до завершения считывания носителя S записи, когда носитель S записи транспортируется в направлении, отличном от направления транспортировки. Так, позиция носителя S записи до или в начале считывания соответствует позиции (целевой области считывания) носителя S записи до транспортировки. Сверх того, носителю S записи требуется расстояние, необходимое для ускорения и стабилизации скорости на уровне скорости транспортировки во время считывания, которая регулируется согласно таким параметрам, как разрешение считывания и скорость обработки первого сканнера 111 или второго сканнера 112. Позиция, где начинается ускорение носителя S записи, соответствует позиции PPUF подготовки сканирования верхней поверхности и позиции PPUR подготовки сканирования верхней поверхности, соответственно, при условии, что относительно позиции SPU считывания первого сканнера 111 выполняется сканирование в прямом направлении и сканирование в обратном направлении, и она соответствует позиции PPLF подготовки сканирования нижней поверхности и позиции PPLR подготовки сканирования нижней поверхности, соответственно, при условии, что относительно позиции SPL считывания второго сканнера 112 выполняется сканирование в прямом направлении и сканирование в обратном направлении.
В определении на этапе S17, если задний край бумаги уже обнаружен датчиком 47 края носителя (этап S17; Да), то вычисляется величина Dis_top (верхняя поверхность) перемещения до позиции PPUF подготовки сканирования верхней поверхности, когда предполагается сканирование в прямом направлении, величина Dis_bot (верхняя поверхность) перемещения до позиции PPUR подготовки сканирования верхней поверхности, когда предполагается сканирование в обратном направлении, величина Dis_top (нижняя поверхность) перемещения до позиции PPLF подготовки сканирования нижней поверхности, когда предполагается сканирование в прямом направлении, и величина Dis_bot (нижняя поверхность) перемещения до позиции PPLR подготовки сканирования нижней поверхности, когда предполагается сканирование в обратном направлении (этап S19).
В частности, величина Dis_top (верхняя поверхность) перемещения до позиции PPUF подготовки сканирования верхней поверхности, когда предполагается сканирование в прямом направлении, определяется посредством количества шагов мотора 26 транспортировки носителя, когда бумага транспортируется в прямом направлении. В этом случае мотор 26 транспортировки носителя используется как шаговый двигатель.
В этом случае, как показано на Фиг.7, количество шагов мотора 26 транспортировки носителя устанавливает опорную позицию печати (записи) записывающей головки 18 (позицию вала субсканирования записывающей головки 18) в нулевое значение, устанавливает направление выходного порта 20 (направление назад) в положительное (+) значение и устанавливает направление входного порта 15 (направление вперед) в отрицательное (-) значение.
Соответственно, величина Dis_top (верхняя поверхность) перемещения до позиции PPUF подготовки сканирования верхней поверхности получается путем вычитания позиции SPU считывания (верхняя поверхность) первого сканнера 111 из позиции PUT верхнего края (верхняя поверхность), которая является позицией верхнего края целевой области сканирования на верхней поверхности бумаги, и путем прибавления величины, соответствующей количеству шагов ACC (в прямом направлении) мотора 26 транспортировки носителя, которые необходимы для ускорения и стабилизации скорости транспортировки, чтобы скорость транспортировки бумаги была равна предопределенной скорости, когда бумага транспортируется.
Аналогично, величина Dis_bot (верхняя поверхность) перемещения до позиции PPUR подготовки сканирования верхней поверхности, когда предполагается сканирование в обратном направлении, определяется посредством количества шагов мотора 26 транспортировки носителя, когда бумага транспортируется. Величина Dis_bot (верхняя поверхность) представляет собой величину, которая получается путем вычитания позиции SPU считывания (верхняя поверхность) первого сканнера 111 из позиции PUB нижнего края (верхняя поверхность), которая является позицией нижнего края целевой области сканирования на верхней поверхности бумаги, и путем вычитания количества шагов ACC (в обратном направлении) мотора 26 транспортировки носителя, которые необходимы для ускорения и стабилизации скорости транспортировки, чтобы скорость транспортировки бумаги была равна предопределенной скорости, когда бумага транспортируется.
Аналогично, величина Dis_top (нижняя поверхность) перемещения до позиции PPLF подготовки сканирования нижней поверхности, когда предполагается сканирование в прямом направлении, определяется посредством количества шагов мотора 26 транспортировки носителя, когда бумага транспортируется. Величина Dis_top (нижняя поверхность) перемещения представляет собой величину, которая получается путем вычитания позиции SPT считывания (нижняя поверхность) второго сканнера 112 из позиции PLT верхнего края (верхняя поверхность), которая является позицией верхнего края целевой области сканирования на нижней поверхности бумаги, и путем прибавления количества шагов ACC (в прямом направлении) мотора 26 транспортировки носителя, которые необходимы для ускорения и стабилизации скорости транспортировки, чтобы скорость транспортировки бумаги была равна предопределенной скорости, когда бумага транспортируется.
Аналогично, величина Dis_bot (нижняя поверхность) перемещения до позиции PPTR подготовки сканирования нижней поверхности, когда предполагается сканирование в обратном направлении, определяется посредством количества шагов мотора 26 транспортировки носителя, когда бумага транспортируется. Величина Dis_bot (нижняя поверхность) перемещения представляет собой величину, которая получается путем вычитания позиции SPL считывания (нижняя поверхность) второго сканнера 112 из позиции PLB нижнего края (нижняя поверхность), которая является позицией верхнего края целевой области сканирования на нижней поверхности бумаги, и путем вычитания количества шагов ACC (в обратном направлении) мотора 26 транспортировки носителя, которые необходимы для ускорения и стабилизации скорости транспортировки, чтобы скорость транспортировки бумаги была равна предопределенной скорости, когда бумага транспортируется.
Далее, определяется, имеют ли место следующие отношения: величина Dis__top (верхняя поверхность) перемещения ≤ 0 и величина Dis_top (нижняя поверхность) перемещения ≤ 0 (этап S20).
В определении на этапе S20 определяется, расположены ли секции верхних краев всех областей считывания на верхней поверхности и нижней поверхности носителя S записи на стороне выходного порта 20 относительно первого сканнера 111 и второго сканнера 112.
В определении на этапе S20, если величина Dis_top (верхняя поверхность) перемещения ≤ 0 и величина Dis_top (нижняя поверхность) перемещения ≤ 0 (этап S20; Да), направление сканирования устанавливается в значение прямого направления (этап S21) и процесс установки направления сканирования завершается.
Кроме того, в определении на этапе S20, если величина Dis_top (верхняя поверхность) перемещения >0 или величина Dis_top (нижняя поверхность) перемещения >0 (этап S20; Нет), то определяется, имеют ли место следующие отношения: величина Dis_bot (верхняя поверхность) перемещения >0 и величина Dis_bot (нижняя поверхность) перемещения >0 (этап S22).
В определении на этапе S22 определяется, расположены ли секции верхних краев всех областей считывания на верхней поверхности и нижней поверхности носителя S записи на стороне входного порта 15 относительно первого сканнера 111 и второго сканнера 112.
В определении на этапе S22, если величина Dis_bot (верхняя поверхность) перемещения >0 и величина Dis_top (нижняя поверхность) перемещения >0 (этап S22; Да), направление сканирования устанавливается в значение обратного направления (этап S23) и процесс установки направления сканирования завершается.
В определении на этапе S22, если величина Dis_bot (верхняя поверхность) перемещения ≤0 или величина Dis_bot (нижняя поверхность) перемещения ≤0 (этап S22; Нет), то определяется, использует ли ABS (Dis_top (верхняя поверхность)), которая представляет собой абсолютную величину величины Dis_top (верхняя поверхность) перемещения, или ABS (Dis_top (нижняя поверхность)), которая представляет собой абсолютную величину величины Dis_top (нижняя поверхность), минимальную величину из следующих величин: величина Dis_top (верхняя поверхность) перемещения, величина Dis_top (нижняя поверхность) перемещения, величина Dis_bot (верхняя поверхность) перемещения и величина Dis_bot (нижняя поверхность) перемещения (этап S24).
В определении на этапе S24, когда целевые области считывания (например, целевые области AR1 и AR2 считывания на Фиг.7) присутствуют в позиции считывания первого сканнера 111 или второго сканнера 112, определяется, какое из направлений транспортировки имеет наикратчайшее общее расстояние транспортировки.
В определении на этапе S24, если ABS (Dis_top (верхняя поверхность)), которая является абсолютной величиной величины Dis_top (верхняя поверхность) перемещения, или ABS (Dis_top (нижняя поверхность)), которая является абсолютной величиной величины Dis_top (нижняя поверхность), использует минимальную величину (этап S24; Да), направление сканирования устанавливается в значение прямого направления (этап S25) и процесс установки направления сканирования завершается.
Сверх того, в определении на этапе S24, если ABS (Dis_top (верхняя поверхность)), которая является абсолютной величиной величины Dis_top (верхняя поверхность) перемещения, или ABS (Dis_top (нижняя поверхность)), которая является абсолютной величиной Dis_top (нижняя поверхность), не использует минимальную величину (этап S24; Нет), то, поскольку ABS (Dis_bot (верхняя поверхность)), которая является абсолютной величиной величины Dis_bot (верхняя поверхность) перемещения, или ABS (Dis_bot (нижняя поверхность)), которая является абсолютной величиной величины Dis_bot (нижняя поверхность), использует минимальную величину из величины Dis_top (нижняя поверхность) перемещения, величин Dis_bot (верхняя поверхность) перемещения и величины Dis_bot (нижняя поверхность) перемещения, направление сканирования устанавливается в значение обратного направления (этап S26) и процесс установки направления сканирования завершается.
Ниже описаны операции считывания с использованием матричного контактного принтера 10, в случае, когда носитель S записи транспортируется в прямом направлении и обратном направлении.
Фиг.8A-8C изображают схемы, иллюстрирующие операцию считывания в прямом направлении с использованием матричного контактного принтера 10. Фиг.8A изображает направление сканирования, Фиг.8B изображает схему, иллюстрирующую всю операцию считывания, а Фиг.8C изображает схему, иллюстрирующую операцию считывания заданной области.
Когда матричный контактный принтер 10 выполняет считывание в прямом направлении, в то время как носитель S записи транспортируется в направлении задней стороны (правой стороны на Фиг.2) с передней стороны (левой стороны на Фиг.2) матричного контактного принтера 10 и проходит через оптический считыватель 1110, считывание выполняется первым сканнером 111 и вторым сканнером 112.
В этом случае, как показано на Фиг.8A, считывание выполняется через задний край (нижний край на данной фигуре) от переднего края (верхнего края на данной фигуре) области R считывания. Сверх того, изображения одной линии, считанные первым сканнером 111 и вторым сканнером 112, последовательно выводятся с использованием вентильной матрицы 45 с левого конца диапазона R считывания. Соответственно, левый конец переднего края области R считывания становится позицией начала считывания, а правый конец заднего края становится позицией завершения считывания.
Как показано на Фиг.8B, когда выполняется полное считывание согласно команде, переданной из главного компьютера 200, ЦП 40 разделяет диапазон R считывания на части, имеющие предопределенную длину в направлении сканирования (направлении Y субсканирования). Так, каждая разделенная область обозначается как блок. Диапазон R считывания первого сканнера 111 и диапазон R считывания второго сканнера 112 разделяются на множество блоков, каждый из которых имеет предопределенную длину. Каждому блоку поочередно задаются номера на верхней поверхности и нижней поверхности, начиная от передней части в направлении сканирования. В частности, передняя часть диапазона R считывания на верхней поверхности нумеруется как блок 1, а передняя часть диапазона R считывания на задней поверхности нумеруется как блок 2. Далее, вдоль направления сканирования задаются блок 3, блок 4,..., блок 8. Длина блока на заднем крае равна длине части, остающейся после разделения диапазона R считывания на предопределенную длину.
Каждый блок представляет собой единицу процесса передачи считанных изображений первого сканнера 111 и второго сканнера 112 на главный компьютер 200. То есть, когда считанные данные изображения, соответствующие одному блоку, сохраняются в буфере изображения (не показан) ОЗУ 41, ЦП 40 передает считанные данные изображения, соответствующие одному блоку, в главный компьютер 200. Упомянутая предопределенная длина, то есть длина блока в направлении транспортировки (направлении сканирования), определяется согласно емкости буфера изображения (не показан) в ОЗУ 41. Например, когда буфер изображения имеет емкость для хранения 300 линий считанных данных цветного изображения с максимальным разрешением (600 точек на дюйм), длина блока устанавливается равной длине приблизительно 300 линий или менее.
При выполнении полного считывания ЦП 40 управляет схемой 46 привода мотора, чтобы вращать мотор 26 транспортировки, и транспортирует носитель S записи на предопределенной скорости. Сверх того, ЦП 40 управляет вентильной матрицей так, чтобы источники света первого сканнера 111 и второго сканнера 112 излучали свет, генерирует считанные данные изображения на основе обнаруженной величины датчика приема света и сохраняет считанные данные изображения в буфере изображения ОЗУ 41 для каждой линии.
ЦП 40 продолжает работу без остановки транспортировки носителя S записи до тех пор, пока весь диапазон R считывания не будет считан первым сканнером 111 и вторым сканнером 112. Когда в этом процессе завершается считывание какого-либо блока и считанные данные изображения, соответствующие этому блоку, сохраняются в буфере изображения в ОЗУ 41, ЦП 40 считывает считанные данные изображения, соответствующие одному блоку, из буфера изображения, передает их на главный компьютер 200 и удаляет из буфера изображения считанные данные изображения, которые полностью переданы. Благодаря удалению считанных данных изображения в буфере изображения снова образуется большое пространство, куда могут быть сохранены новые считанные данные изображения.
Когда завершается считывание одного блока, ЦП 40 передает считанные данные изображения в главный компьютер 200, как описано выше. Порядок передачи считанных данных изображения каждого блока соответствует порядку, в котором было выполнено считывание, и он не ограничивается порядком нумерации блоков.
При передаче считанных данных изображения в главный компьютер 200 ЦП 40 добавляет информацию, такую как считанная поверхность (верхняя поверхность или нижняя поверхность), размер считанного блока, номер блока, длина данных и т.п. в считанные данные изображения в качестве заголовка. Сверх того, в случае когда присутствует большой объем считанных данных изображения, ЦП 40 может разделить считанные данные изображения одного блока. В этом случае ЦП 40 может добавить информацию для комбинирования разделенных считанных данных изображения в главном компьютере 200 в форме заголовка.
Сверх того, когда выполняется считывание обозначенной области согласно команде, принятой из главного компьютера 200, как показано на Фиг.8C, ЦП 40 формирует в диапазоне R считывания области целевого считывания, обозначенные посредством команды настройки. В примере с Фиг.8C, в диапазоне R считывания на верхней поверхности образуются области A1 и A2, а в диапазоне R считывания на нижней поверхности образуется область A3.
ЦП 40 упорядочивает блоки согласно областям сформированной цели считывания. Так, если длины в направлении сканирования этих областей короче длин вышеописанных блоков, то ЦП 40 устанавливает одну область как один блок. Передней край и задний край блока совпадают с передним краем и задним краем области. Если длина области больше предопределенной длины, то ЦП 40 разделяет область цели считывания на части с предопределенной длиной, начиная с передней стороны в направлении сканирования. В примере с Фиг.8C, поскольку области A1 и A3 превышают предопределенную длину, область A1 разделена на блоки 1 и 3, а область A3 разделена на блоки 2 и 4. Номера блоков поочередно присваиваются верхней поверхности и нижней поверхности, начиная с переднего края блока, аналогично случаю полного считывания.
В случае, когда множество областей цели считывания располагаются в направлении ширины диапазона R считывания и перекрывают друг друга в направлении сканирования, все перекрывающиеся области становятся одним кластерным блоком. Если длина одного кластерного блока превышает верхнее пороговое значение длины для блока, то один кластерный блок разделяется на множество блоков в направлении сканирования.
Далее, ЦП 40 начинает считывание областей A1-A3 диапазона R считывания. ЦП 40 управляет вентильной матрицей 45 и схемой 46 привода мотора, чтобы продолжать выполнение операции считывания без остановки транспортировки носителя S записи до тех пор, пока все области не будут считаны первым сканнером 111 и вторым сканнером 112. Когда в этом процессе завершается считывание какого-либо блока и считанные данные изображения, соответствующие этому блоку, сохраняются в буфере изображения в ОЗУ 41, ЦП 40 считывает считанные данные изображения, соответствующие одному блоку, из буфера изображения, передает их на главный компьютер 200 и удаляет из буфера изображения считанные данные изображения, которые полностью переданы. В этом случае, порядок передачи соответствует порядку, в котором выполнялось считывание, аналогично случаю полного считывания, и этот порядок не ограничивается порядком нумерации блоков.
Кроме того, когда ЦП 40 передает считанные данные изображения в главный компьютер 200, заголовок, добавленный в эти считанные данные изображения, включает в себя информацию, такую как считанная поверхность (верхняя поверхность или нижняя поверхность), размер считанного блока, номер блока, длина данных и т.п., а также дополнительную информацию, такую как номер области координаты начала и конца области и т.п. В случае, когда одна область разделяется на множество блоков, ЦП 40 может включать в состав информацию для комбинирования блоков, формирующих каждую область. Сверх того, когда множество областей входят в состав одного блока, ЦП 40 разрезает считанные данные изображения блока для каждой области и передает их в главный компьютер 200 для каждой области. В случае считывания назначенной области ЦП 40 может разделить считанные данные изображения большого объема и передать их в главный компьютер 200.
Главный компьютер 200 принимает считанные данные изображения, переданные из матричного контактного принтера 10, и преобразует считанное изображение для каждого блока. Кроме того, когда посредством команды, переданной в матричный контактный принтер 10, указывается полное считывание, главный компьютер 200 комбинирует блоки относительно верхней поверхности и нижней поверхности, чтобы сгенерировать целое изображение области R считывания. Кроме того, когда посредством команды настройки указывается считывание назначенной области, если одна область разделена на множество блоков, то главный компьютер 200 комбинирует эти блоки. Сверх того, если одна область формирует один блок, главный компьютер 200 использует считанные данные изображения блока в исходной форме и генерирует считанные данные изображения для каждой области.
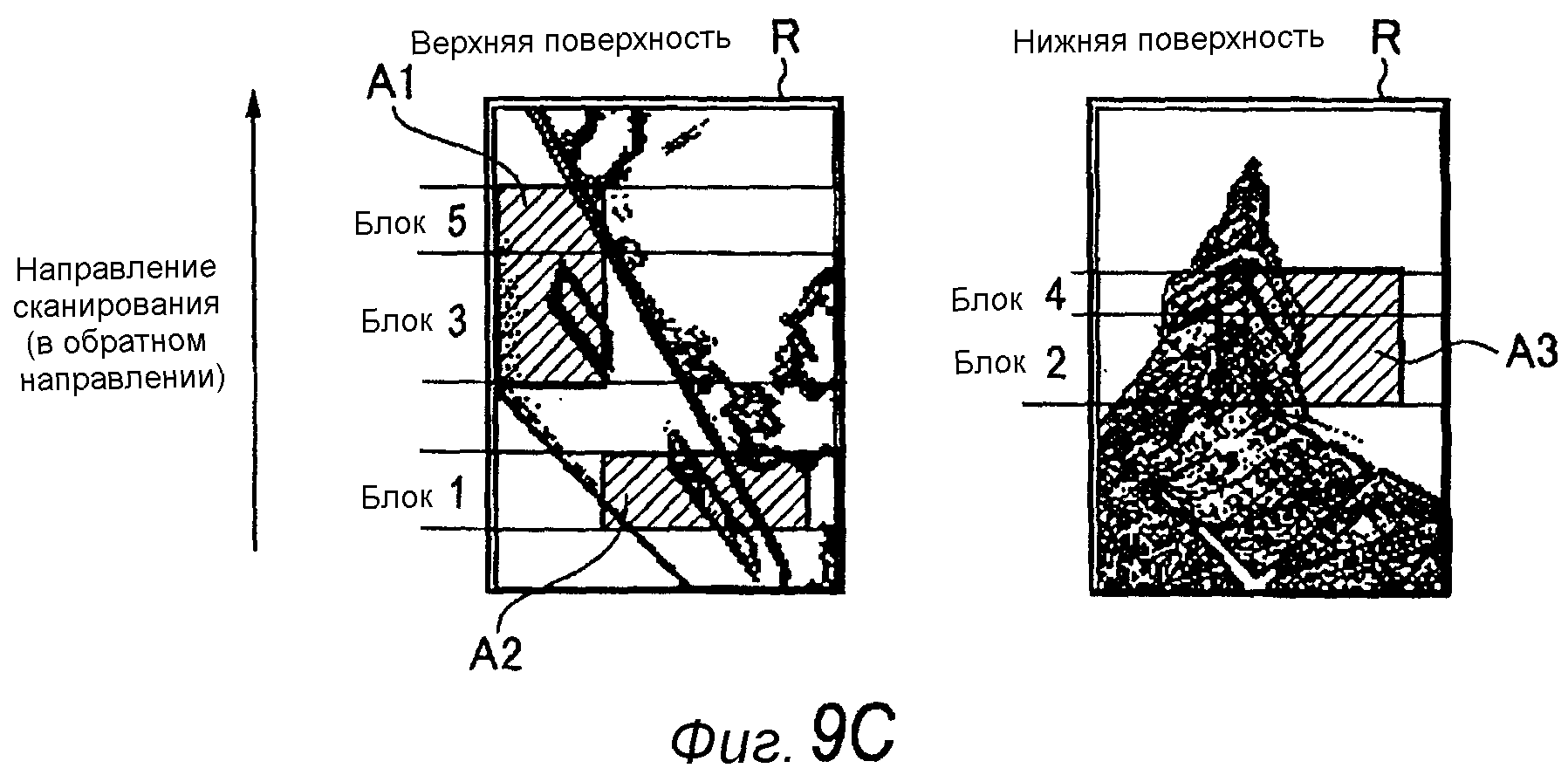
Фиг.9A-9C изображают схемы, иллюстрирующие операцию считывания в обратном направлении с использованием матричного контактного принтера 10. Фиг.9A изображает направление сканирования, Фиг.9B изображает схему, иллюстрирующую всю операцию считывания, а Фиг.9C изображает схему, иллюстрирующую операцию считывания заданной области.
Если матричный контактный принтер 10 выполняет считывание в обратном направлении, когда носитель S записи транспортируется в направлении передней стороны с задней стороны матричного контактного принтера 10 и проходит через оптический считыватель 110, считывание выполняется первым сканнером 111 и вторым сканнером 112. В этом случае, как показано на Фиг.9A, считывание выполняется через передний край (верхний край на данной фигуре) от заднего края (нижнего края на данной фигуре) области R считывания. Изображения одной линии, считанные первым сканнером 111 и вторым сканнером 112, последовательно выводятся по одной линии через вентильную матрицу 45 с левого конца (начала стрелки) диапазона R считывания к правому концу (концу стрелки). Соответственно, левый конец заднего края области R считывания становится позицией начала считывания, а правый конец переднего края становится позицией завершения считывания.
Как показано на Фиг.9B, когда полное считывание выполняется в обратном направлении, диапазон R считывания разделяется на блоки, начиная с заднего края. В этом случае, номера блоков поочередно присваиваются блокам на верхней стороне и нижней стороне, начиная со стороны, которая становится передней частью во время считывания. Другие операции в данной конфигурации совпадают с операциями полного считывания в прямом направлении.
Сверх того, как показано на Фиг.9C, когда считывание обозначенной области выполняется в обратном направлении, целевые области считывания упорядочиваются согласно команде настройки, принятой из главного компьютера 200, и далее блоки упорядочиваются со стороны заднего края диапазона R считывания, который является передней частью в направлении сканирования. Кроме того, область, которая превышает верхнее пороговое значение длины блока, разделяется на предопределенную длину относительно стороны заднего края области R считывания. Другие операции в данной конфигурации совпадают с операциями считывания назначенной области в прямом направлении.
Данные изображения, считанные в обратном направлении, вертикально перевернуты относительно данных изображения, считанных в прямом направлении. Соответственно, ЦП 40 матричного контактного принтера 10 может выполнить обработку инвертирования считанных данных изображения и их передачи в главный компьютер 200. Тем не менее, поскольку главный компьютер 200, который передал команду настройки, имеет сведения о направлении сканирования, главный компьютер 200 может выполнить обработку вертикального инвертирования считанных данных изображения на основании этой информации.
Фиг.10 изображает схему последовательности операций, иллюстрирующую работу матричного контактного принтера 10 согласно настоящему варианту осуществления.
Во-первых, если носитель S записи вставляется во входной порт 15 и передний край носителя S записи обнаруживается датчиком 47 края носителя (этап S31; Да), ЦП 40 матричного контактного принтера 10 позволяет столу 38 выступить внутри транспортного канала P носителя S записи и задействует мотор 26 транспортировки носителя для выравнивания носителя S записи (этап S32).
Далее, ЦП 40 определяет, является ли обнаруженный носитель S записи чеком или расчетной книжкой (этап S33). Так, ЦП 40 может получить информацию, переданную из главного компьютера 200, и может определить тип носителя S записи на основании этой информации, или ЦП 40 может обнаружить позицию переднего края или бокового края носителя S записи, используя датчик 47 края носителя или датчик 55 края носителя, и он может определить тип носителя S записи на основании позиции или размера. Сверх того, ЦП 40 может выполнить считывание информации MICR посредством магнитной головки 34 на основании позиции переднего края или бокового края носителя S записи, обнаруженного посредством датчика 47 края носителя или датчика 55 края носителя, и он может определить, присутствует ли информация MICR в области MA, чтобы тем самым определить тип носителя S записи. В этом варианте осуществления ЦП 40 получает из главного компьютера 200 информацию для определения типа (чек или расчетная книжка) носителя S записи, информацию относительно размера чека, информацию относительно позиции области MA и информацию относительно расстояния транспортировки, когда носитель S записи является чеком, и на основании этой информации определяет, является ли носитель S записи чеком или расчетной книжкой.
В определении на этапе S33, когда носитель S записи не является чеком (этап S33; Нет), ЦП 40 определяет, что носитель S записи является расчетной книжкой, например, и выполняет считывание магнитной ленты, установленной в этой расчетной книжке. Таким образом, ЦП 40 транспортирует носитель S записи до позиции, которая может быть считана магнитной головкой 34, и выполняет чтение и/или запись магнитной полосы посредством магнитной головки 34 (этап S34). Сверх того, ЦП 40 транспортирует носитель S записи в позицию записывающей головки 18, чтобы выполнить запись на записываемой поверхности с использованием записывающей головки 18 (этап S35), выводит носитель S записи из входного порта 15 (этап S36) и завершает работу.
В определении на этапе S33, если носитель S записи является чеком (этап S33; Да), ЦП 40 определяет, была ли принята из главного компьютера 200 команда считывания информации MICR (этап S37).
Сверх того, в определении на этапе S37, если определяется, что команда считывания информации MICR принята (этап S37; Да), ЦП 40 обеспечивает возможность выравнивающему столу 38 выйти из транспортного канала P и транспортирует носитель S записи посредством механизма 100 транспортировки носителя до тех пор, пока, по меньшей мере, передний край носителя S не достигнет датчика 55 ширины носителя. Далее, ЦП 40 приводит в действие мотор 56 привода каретки (Фиг.4), чтобы сканировать посредством каретки 19 в главном направлении сканирования, и обнаруживает позицию ширины носителя S записи на основании выходного сигнала из датчика 55 ширины носителя и позицию главного направления сканирования каретки 19 (этап S38). Кроме того, ЦП 40 выполняет мониторинг выходного сигнала из датчика 47 края носителя в процессе транспортировки носителя S записи посредством механизма 100 транспортировки носителя и обнаруживает позицию заднего края носитель S записи (этап S39).
Далее, ЦП 40 транспортирует носитель S записи посредством механизма 100 транспортировки носителя до позиции, где область MA может быть считана магнитной головкой 34 (этап S40), управляет схемой 46 привода мотора, чтобы привести в действие мотор 57 привода магнитной головки, и выполняет считывание знаков MICR с области MA посредством магнитной головки 34 (этап S41). Информация (информация MICR), считанная магнитной головкой 34, оцифровывается вентильной матрицей 45, и ЦП 40 получает цифровые данные (этап S42), анализирует информацию знаков на основании этих данных и преобразует их в текстовую информацию (этап S43). Так, определяется, больше ли количество знаков, которые невозможно анализировать, чем предопределенное число (этап S44). Если присутствуют знаки, которые невозможно анализировать и количество которых превышает предустановленное число (этап S44; Да), ЦП 40 выводит ошибку, выводит носитель S записи (этап S45) и завершает работу. В этапе S15 ЦП 40 может уведомить о генерации ошибки посредством секции отображения и т.п., предоставленной в матричном контактном принтере 10, или передать информацию, указывающую о генерации ошибки, в главный компьютер 200 или может выполнить как уведомление, так и передачу.
С другой стороны, в определении на этапе S44, если количество неанализируемых знаков не превышает предустановленное число (этап S44; Нет), то ЦП 40 выполняет сканирование посредством оптического считывания 10 и передает считанные данные изображения в главный компьютер 200 (этап S46).
Кроме того, ЦП 40 ожидает приема команды печати передаточной надписи из главного компьютера 200 (этап S47). Если принимается команда печати передаточной надписи (этап S47; Да), ЦП 40 приводит во вращение мотор 26 транспортировки носителя, чтобы транспортировать носитель S записи до позиции под записывающей головкой 18, и также приводит в действие мотор 56 привода каретки и записывающую головку 18, чтобы выполнить печать передаточной надписи, которая обозначает завершение процесса, на задней поверхности носителя S записи (этап S48). Далее, если печать передаточной надписи завершена, ЦП 40 дополнительно приводит во вращение мотор 26 транспортировки носителя и выводит носитель S записи через входной порт 15 или выходной порт 20.
Фиг.11 изображает иллюстрацию операции считывания посредством матричного контактного принтера 10, которая, более конкретно, иллюстрирует операцию этапа S16 с Фиг.10.
ЦП 40 принимает команду настройки, передаваемую из главного компьютера 200 (этап S51), и получает содержимое настройки, установленное командой настройки (этап S52). Так, ЦП 40 определяет, установлена ли целевая область считывания посредством команды настройки (этап S53). Если область не установлена (этап S53; Нет), то ЦП 40 получает позицию блока, который является опорным для считывания всей области R считывания, на основании направления сканирования, установленного командой настройки (этап S54). Позиция блока, когда выполняется полное считывание области R считывания, сохраняется, например, в ЭСППЗУ 42.
Сверх того, если область целевого считывания установлена посредством команды настройки (этап S53; Да), ЦП 40 получает номера областей и координаты позиции начала и позиции конца каждой области (этап S55) и упорядочивает области в диапазоне R считывания. Сверх того, ЦП 40 определяет позицию блока, подходящего для области, на основании направления сканирования, установленного командой настройки (этап S56).
После получения или определения позиции блока ЦП 40 ожидает приема команды начала сканирования из главного компьютера 200 (этап S57). Если была принята команда начала сканирования (этап S57; Да), носитель S записи транспортируется до позиции начала сканирования оптического считывателя 110 посредством механизма 100 транспортировки носителя в направлении, при котором расстояние транспортировки будет относительно коротким, на основании направления сканирования, установленного командой настройки, позиции назначенной области в случае считывания назначенной области и текущей позиции носителя S записи (этап S58).
Кроме того, ЦП 40 выполняет считывания, используя первый сканнер 111 и второй сканнер 112 и одновременно транспортируя носитель S записи (этап S59).
В течение считывания ЦП 40 определяет присутствие или отсутствие блока, в котором считывание завершено (этап S60). Если присутствует блок, в котором считывание завершено (этап S60; Да), ЦП 40 начинает процесс считывания данных изображения блока из буфера изображения ОЗУ 41 и передает их в главный компьютер 200 (этап S61), и далее, если передача завершена, то ЦП 40 удаляет считанные данные изображения соответствующего блока из буфера изображения. ЦП 40 определяет, завершено ли считывание всех блоков (этап S62).
В определении на этапе S62, если присутствует блок, в котором считывание не завершено (этап S62; Нет), то ЦП 40 возвращает процедуру к этапу S59 и продолжает операцию считывания. Так, если есть блок, в котором считывание было только что завершено, ЦП 40 передает считанные данные изображения этого блока.
Кроме того, в определении на этапе S62, если считывание всех блоков в области R считывания на верхней поверхности и нижней поверхности завершено (этап S62; Да), ЦП 40 завершает операцию считывания.
Как описано выше, датчики приема света первого сканнера 111 и второго сканнера 112 упорядочены со сдвигом относительно друг друга. В этом варианте осуществления датчик приема света первого сканнера 111 смещен в сторону передней стороны на 5 мм. Так, в случае, когда сканирование выполняется в прямом направлении, диапазон R считывания на верхней поверхности полностью считывается до считывания диапазона R на нижней поверхности, и в случае, когда сканирование выполняется в обратном направлении, диапазон R считывания на нижней поверхности полностью считывается до считывания диапазона R на верхней поверхности.
Как описано выше, в матричном контактном принтере 10 согласно настоящему варианту осуществления, поскольку ЦП 40 устанавливает направление транспортировки во время считывания носителя S записи, так что расстояние транспортировки носителя S записи до его полного считывания сокращается, предотвращается излишняя транспортировка носителя S записи, что повышает эффективную пропускную способность.
В случае, когда направление вывода носителя определяется заранее, направление транспортировки при считывании первым сканнером 111 или вторым сканнером 112 устанавливается так, чтобы совпадать с направлением вывода, и, соответственно, даже тогда, когда направление вывода определяется заранее, обеспечивается возможность надежным образом подавить излишнюю транспортировку носителя и повысить пропускную способность.
Кроме того, оптический считыватель 110 включает в себя первый сканнер 111, который считывает одну поверхность носителя S записи, и второй сканнер 112, который считывает другую поверхность носителя S записи, причем эти сканнеры расположены на противоположных сторонах транспортного канала P, соответственно, и, таким образом, обеспечивается возможность считывания обеих поверхностей носителя S записи. ЦП 40 обеспечивает возможность считывания блоков, установленных в диапазоне R считывания первым сканнером 111 и вторым сканнером 112. Далее, если считывание какого-либо одного блока завершается, даже до завершения считывания других блоков, которые установлены в диапазоне R считывания той же поверхности или другой поверхности, ЦП 40 обеспечивает возможность считывания данных изображения блока, в котором считывание завершено, из буфера изображения и передает эти данные. Так, обеспечивается возможность сократить время ожидания относительно передачи считанных данных изображения, чтобы таким образом выполнить считывание обеих поверхностей носителя S записи на высокой скорости. Кроме того, буфер изображения ОЗУ 41 может иметь небольшую емкость по сравнению с объемом, в котором хранятся данные изображения, считанные с обеих поверхностей.
Выше был описан примерный вариант осуществления настоящего изобретения, однако настоящее изобретение не ограничивается этим вариантом осуществления. Например, в вышеописанном варианте осуществления обе поверхности носителя S записи считываются одновременно, однако также возможно считывание одной стороны носителя S записи.
Кроме того, например, механизм 28 выравнивания, записывающая головка 18 и оптический считыватель 110 последовательно расположены в транспортном канале P носителя S записи, однако настоящее изобретение не ограничивается этой компоновкой. Соответствующие элементы могут быть расположены в произвольном порядке. Например, оптический считыватель 100 может быть расположен в позиции, расположенной максимально близко к входному порту 15.
Кроме того, в вышеописанном варианте осуществления секция управления, установленная на плате управления (не показана), которая находится в матричном контактном принтере 10, имеет функции, указанные функциональными блоками с Фиг.4, и она управляет, например, соответствующими секциями матричного контактного принтера 10. Тем не менее, устройство, расположенное вне матричного контактного принтера 10 и соединенное с ним, может реализовывать соответствующие функциональные секции, показанные на Фиг.4, и может управлять операциями матричного контактного принтера 10. Сверх того, поскольку соответствующие функциональные блоки с Фиг.4 реализованы посредством сочетания аппаратного обеспечения и программного обеспечения, конкретный тип и спецификации аппаратного обеспечения и программного обеспечения могут быть произвольными, и, следовательно, можно произвольным образом менять конфигурацию.
Кроме того, в вышеописанном варианте осуществления первый сканнер 111 и второй сканнер 112 могут выполнять монохроматическое сканирование и цветное сканирование с использованием источников R, G и B, но, например, возможно считывание с использованием инфракрасных лучей из соответствующего источника, излучающего инфракрасный свет. Поскольку магнитные чернила имеют высокие показатели абсорбции относительно инфракрасных лучей по сравнению с обычными чернилами, предоставляется возможность захвата только тех знаков, которые нанесены магнитными чернилами, и обеспечивается возможность считывания информации MICR в области MA с высокой эффективностью.
Кроме того, в вышеописанном варианте осуществления настоящее изобретение применяется к устройству планшетного типа, которое транспортирует носитель S записи в горизонтальной плоскости, однако настоящее изобретение не ограничивается этим. Например, настоящее изобретение может быть применено к устройству, включающему в себя транспортный канал, в котором носитель S записи финансового значения, такой как чек, транспортируется в вертикальном положении. Сверх того, в вышеописанном варианте осуществления рассматривается матричный контактный принтер 10, включающий в себя оптический считыватель 110, однако настоящее изобретение не ограничивается этим. Например, секция оптического считывания, соответствующая оптическому считывателю 110, может быть установлена в струйном принтере, термографическом принтере, лазерном принтере и т.п. Кроме того, секция оптического считывания, соответствующая оптическому считывателю 110, может быть установлена в устройстве, являющемся компонентом другого устройства (банкомата, устройства выдачи наличных и т.п.), в добавление к устройству, используемому как независимый принтер.
Кроме того, настоящее изобретение не ограничивается конфигурацией, в которой оптический считыватель 110 реализован интегрально с устройством, которое записывает знаки или изображения на носитель записи, такой как бумага. Например, настоящее изобретение может быть применено к различным устройствам, включающим в себя независимые устройства сканирования или копировальные аппараты.
Реферат
Изобретение относится к средствам сканирования изображения. Техническим результатом является возможность исключать излишнюю транспортировку бумаги (носителя информации) в течение операции подготовки сканирования или после операции сканирования, чтобы тем самым повысить пропускную способность средства сканирования. Результат достигается тем, что секция транспортировки выполнена с возможностью транспортировать носитель информации, который является целью считывания, в прямом и обратном направлениях вдоль транспортного канала. Секция оптического считывания установлена в транспортном канале. Секция оптического считывания оптически считывает носитель, который транспортируется посредством секции транспортировки. Секция управления устанавливает направление транспортировки носителя информации во время считывания носителя информации на основании позиции носителя информации до или в момент начала считывания носителя информации и позиции считывания секции оптического считывания таким образом, чтобы расстояние транспортировки носителя информации до завершения считывания носителя информации сокращалось, и управляет секцией транспортировки и секцией оптического считывания. 3 н. и 10 з.п. ф-лы, 16 ил.
Формула
секцию транспортировки, выполненную с возможностью транспортировки носителя информации, который является целью считывания, в прямом и обратном направлениях вдоль транспортного канала;
секцию оптического считывания, установленную в транспортном канале и обеспечивающую оптическое считывание носителя информации, который транспортируется посредством секции транспортировки; и
секцию управления, которая устанавливает направление транспортировки носителя информации во время считывания носителя информации на основании позиции носителя информации до или когда считывание носителя информации началось, и позиции считывания секции оптического считывания так, чтобы расстояние транспортировки носителя информации до завершения считывания носителя информации сокращалось, и управляет секцией транспортировки и секцией оптического считывания.
в котором секция оптического считывания включает в себя первую секцию считывания, которая выполнена с возможностью считывания одной поверхности носителя информации, и вторую секцию считывания, которая выполнена с возможностью считывания другой поверхности носителя информации, причем первая секция считывания и вторая секция считывания расположены на обеих сторонах транспортного канала соответственно,
при этом секция управления выполнена с возможностью установки направления транспортировки носителя информации так, что расстояние транспортировки носителя информации до завершения считывания носителя информации первой секцией считывания и второй секцией считывания сокращается, в случае, когда считывание обеих поверхностей носителя информации выполняется первой секцией считывания и второй секцией считывания одновременно.
устанавливают направление транспортировки носителя информации во время считывания носителя информации на основании позиции носителя информации до или когда считывание носителя информации началось и позиции считывания секции оптического считывания так, чтобы расстояние транспортировки носителя информации до завершения считывания носителя информации сокращалось; и
управляют секцией транспортировки и секцией оптического считывания на основании установленного направления транспортировки.
в котором секция оптического считывания включает в себя первую секцию считывания, которая считывает одну поверхность носителя информации, и вторую секцию считывания, которая считывает другую поверхность носителя информации, причем первая секция считывания и вторая секция считывания расположены на обеих сторонах транспортного канала соответственно, и
при этом на этапе управления устанавливают направление транспортировки носителя информации так, что расстояние транспортировки носителя информации до завершения считывания носителя информации первой секцией транспортировки и второй секцией транспортировки сокращается, в случае, когда считывание обеих поверхностей носителя информации выполняется первой секцией считывания и второй секцией считывания одновременно.
устанавливают направление транспортировки носителя информации во время считывания носителя информации на основании позиции носителя информации до или когда считывание носителя информации началось и позиции считывания секции оптического считывания так, чтобы расстояние транспортировки носителя информации до завершения считывания носителя информации сокращалось;
управляют транспортной секцией, чтобы транспортировать носитель информации на основании установленного направления транспортировки; и
управляют секцией оптического считывания, чтобы оптически считывать носитель информации на основании установленного направления транспортировки.
Комментарии