Хирургический режуще-сшивающий инструмент с устройством определения положения пускового элемента и состояния картриджа - RU2631209C2
Код документа: RU2631209C2
Чертежи






























Описание
Область применения
В общем, настоящее изобретение относится к хирургическим инструментам, а более конкретно, к режуще-сшивающим хирургическим инструментам с электронными датчиками, способными определять положение пускового элемента и состояние картриджа.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В состав хирургических инструментов часто входит дистальный концевой зажим, который захватывает ткани для достижения диагностического или терапевтического эффекта (например, эндокатеры, зажимы, рассекатели, сшивающие инструменты, устройства для наложения скобок, устройства доступа, устройства для введения лекарственных средств/генной терапии, энергетические устройства проведения ультразвуковых, РЧ- или лазерных процедур и т.д.). Например, известные хирургические сшивающие инструменты включают в себя концевой зажим, который одновременно выполняет продольный разрез ткани и накладывает ряды скоб на противоположные края разреза. Такие сшивающие инструменты часто имеют пусковой стержень, который перемещает концевой зажим в ответ на движения, выполняемые вручную или с помощью электропривода. Пусковой стержень проводит рассекающий элемент сквозь ткани, удерживаемые концевым зажимом, и перемещает множество скобок впритык к выталкивателю, который поддерживает скобки, для осуществления выталкивания скобок из концевого зажима.
Как правило, хирургические инструменты не предоставляют достаточной обратной связи пользователю во время операции. В общем многие управляемые манипулятором хирургические сшивающие устройства, например, не предупреждают пользователя о величине развертывающего усилия или о положении рассекающего элемента во время рассечения или наложения скобок. В этой связи, эндокатеры с приводом от электродвигателя, в которых движение перемещения запускается простым нажатием на кнопку, как правило, не признаются врачами. Таким образом, существует необходимость в технологиях для хирургических инструментов, которые способны устранить некоторые из этих недостатков.
[0001] Приведенные выше пояснения даны исключительно для описания некоторых недостатков, обнаруженных в настоящее время в области применения изобретения, и не ограничивают объем изобретения.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к электронному датчику для определения положения пускового элемента в концевом зажиме и/или состояния картриджа в концевом зажиме. Электронный датчик имеет резистивный элемент, удерживаемый в концевом зажиме. Пусковой элемент, выполненный с возможностью перемещения в концевом зажиме, при перемещении по касательной контактирует с резистивным элементом. Во время перемещения пускового элемента прикрепленный к нему рассекающий элемент может отсоединить резисторы в резистивном элементе. Электронный датчик может связываться с устройством памяти, процессором и индикатором.
В соответствии с общими аспектами различных вариантов осуществления настоящего изобретения предложен хирургический инструмент, в состав которого входит хирургический концевой зажим, содержащий удлиненный канал, имеющий проксимальный конец и дистальный конец; пусковой элемент, выполненный с возможностью избирательно перемещаться между указанным проксимальным концом удлиненного канала и упомянутым дистальным концом упомянутого удлиненного канала при приложении к нему движения от привода; резистивный элемент удерживается в подвижном контакте с упомянутым пусковым элементом во время перемещения пускового элемента от указанного проксимального конца к указанному дистальному концу удлиненного канала таким образом, что резистивный элемент генерирует выходные сигналы, указывающие на положение пускового элемента внутри указанного удлиненного канала; и запоминающее устройство, функционально связанное с упомянутым резистивным элементом и выполненное с возможностью записи выходных сигналов во время перемещения пускового элемента по удлиненному каналу.
В соответствии с другими общими аспектами различных вариантов осуществления настоящего изобретения предусмотрен картридж со скобками для использования с хирургическим инструментом, причем указанный картридж со скобками содержит корпус картриджа, выполненный с возможностью функционально поддерживаться хирургическим инструментом таким образом, что пусковой элемент хирургического инструмента может продольно перемещаться через указанный корпус картриджа при приложении к нему движения от привода; и резистивный элемент, прикрепленный к указанному корпусу картриджа для подвижного контактирования с пусковым элементом в то время, как пусковой элемент перемещается в нем, причем указанный резистивный элемент выполнен с возможностью функционально передавать выходные сигналы, указывающие положение пускового элемента внутри корпуса картриджа, к части памяти хирургического инструмента.
В соответствии с другими общими аспектами, различные варианты осуществления настоящего изобретения направлены на хирургический инструмент, содержащий систему манипулятора, содержащую процессор и хирургический концевой зажим, функционально взаимодействующий с указанной системой манипулятора для получения от нее приводных движений. Хирургический концевой зажим содержит удлиненный канал, имеющий проксимальный конец и дистальный конец; пусковой элемент, выполненный с возможностью избирательно перемещаться между указанным проксимальным концом удлиненного канала и упомянутый дистальным концом упомянутого удлиненного канала при приложении к нему движения привода упомянутой системой манипулятора; и резистивный элемент, поддерживаемый в подвижном контакте с упомянутым пусковым элементом во время перемещения упомянутого пускового элемента от указанного проксимального конца к указанному дистальному концу удлиненного канала, таким образом, что резистивный элемент генерирует выходные сигналы, указывающие на положение пускового элемента внутри указанного удлиненного канала, и передает указанные выходные сигналы к указанному процессору.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления, описанные здесь, станут более очевидными и будут лучше поняты при ссылке на следующее описание неограничивающих вариантов осуществления настоящего писания, рассматриваемого совместно с прилагаемыми чертежами.
Фиг. 1 представляет собой вид в перспективе хирургического рассекающего и сшивающего инструмента согласно различным вариантам осуществления.
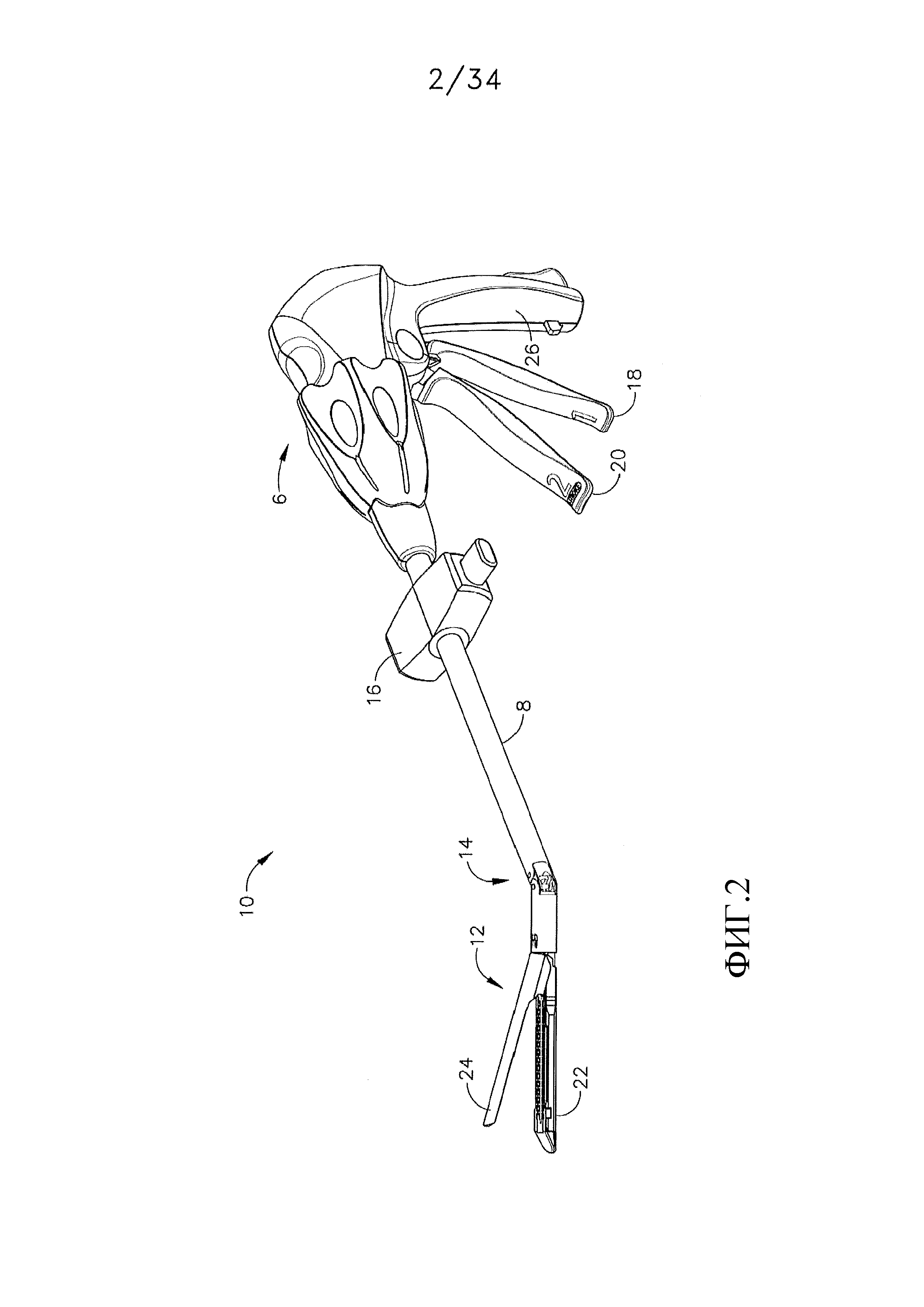
[0002] Фиг. 2 представляет собой другой вид в перспективе хирургического рассекающего и сшивающего инструмента согласно различным вариантам осуществления.
На Фиг. 3–5 представлены виды с пространственным разделением компонентов концевого зажима и стрежня инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг. 6 представлен вид сбоку концевого зажима в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг. 7 представлен вид с пространственным разделением компонентов рукоятки инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
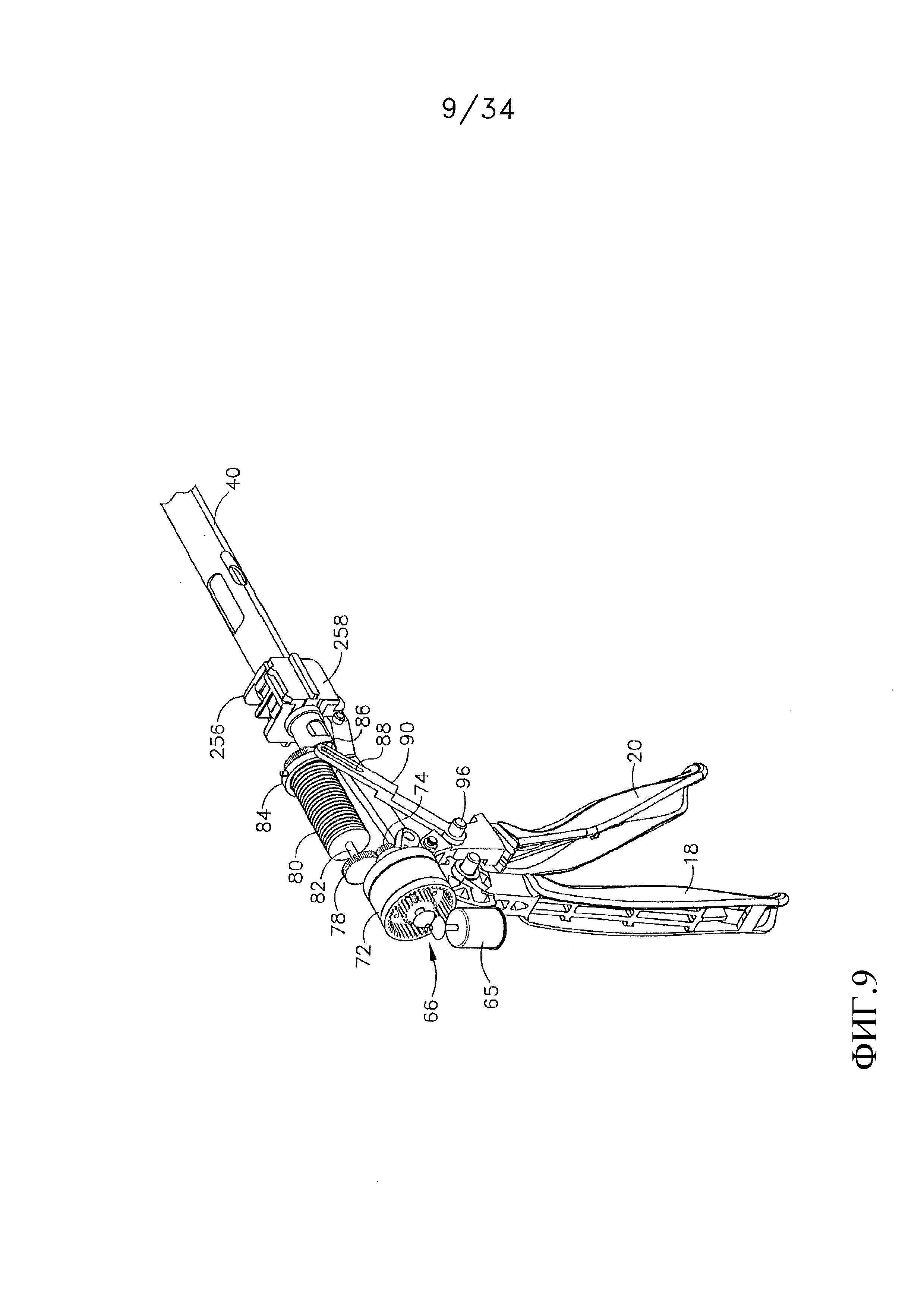
[0003] На Фиг. 8 и 9 представлены частичные виды в перспективе рукоятки в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг. 10 представлен вид сбоку рукоятки в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг. 10A и 10B показан пропорциональный датчик, который можно использовать в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг. 11 представлено схематическое изображение электрической схемы, применяемой в инструменте в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг. 12 представлен вид сверху концевого зажима, отображающий электронный датчик в удлиненном канале в соответствии с различными вариантами осуществления.
На Фиг. 13 представлен вид снизу в перспективе картриджа со скобками, имеющего электронный датчик согласно различным вариантам осуществления.
На Фиг. 14 представлен вид сверху электронного датчика согласно различным вариантам осуществления.
На Фиг. 15 представлен вид в перспективе одного контроллера манипулятора в соответствии с различными вариантами осуществления.
На Фиг. 16 представлен вид в перспективе одного штатива хирургической руки-манипулятора/манипулятора манипуляторной системы, функционально поддерживающей множество вариантов осуществления хирургических инструментов.
На Фиг. 17 представлен вид сбоку штатива хирургической руки-манипулятора/манипулятора, изображенного на Фиг. 16 в соответствии с различными вариантами осуществления.
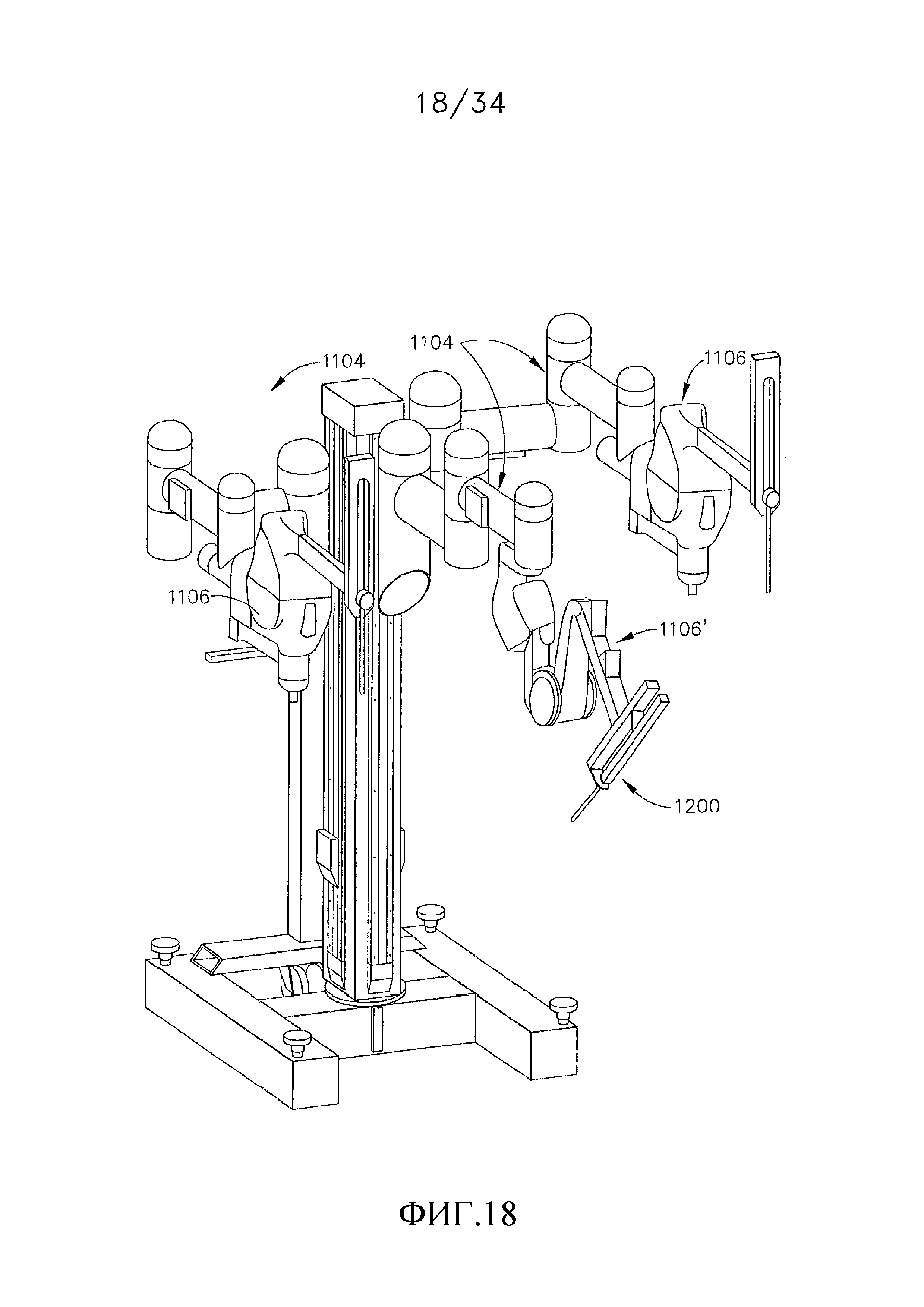
На Фиг. 18 представлен вид в перспективе приблизительной структуры штатива с позиционирующими связями для функциональной поддержки манипуляторов, которые могут быть использованы с различными вариантами осуществления хирургических инструментов.
На Фиг. 19 представлен вид в перспективе хирургического инструмента в соответствии с различными вариантами осуществления.
На Фиг. 20 представлен общий вид с пространственным разнесением компонентов адаптера и держателя инструмента для присоединения различных вариантов хирургического инструмента к роботизированной системе.
На Фиг. 21 представлен вид сбоку адаптера, показанного на Фиг. 20.
[0004] На Фиг. 22 представлен вид снизу адаптера, показанного на Фиг. 20.
На Фиг. 23 показан вид сверху адаптера, представленного на Фиг. 20 и 21.
На Фиг. 24 представлен частичный перспективный вид снизу варианта хирургического инструмента, показанного на Фиг. 19.
На Фиг. 25 представлен частичный вид с разнесением компонентов части шарнирного хирургического концевого зажима согласно различным вариантам осуществления.
На Фиг. 26 представлен вид в перспективе хирургического инструмента, показанного на Фиг. 10, со снятым опорным корпусом инструмента.
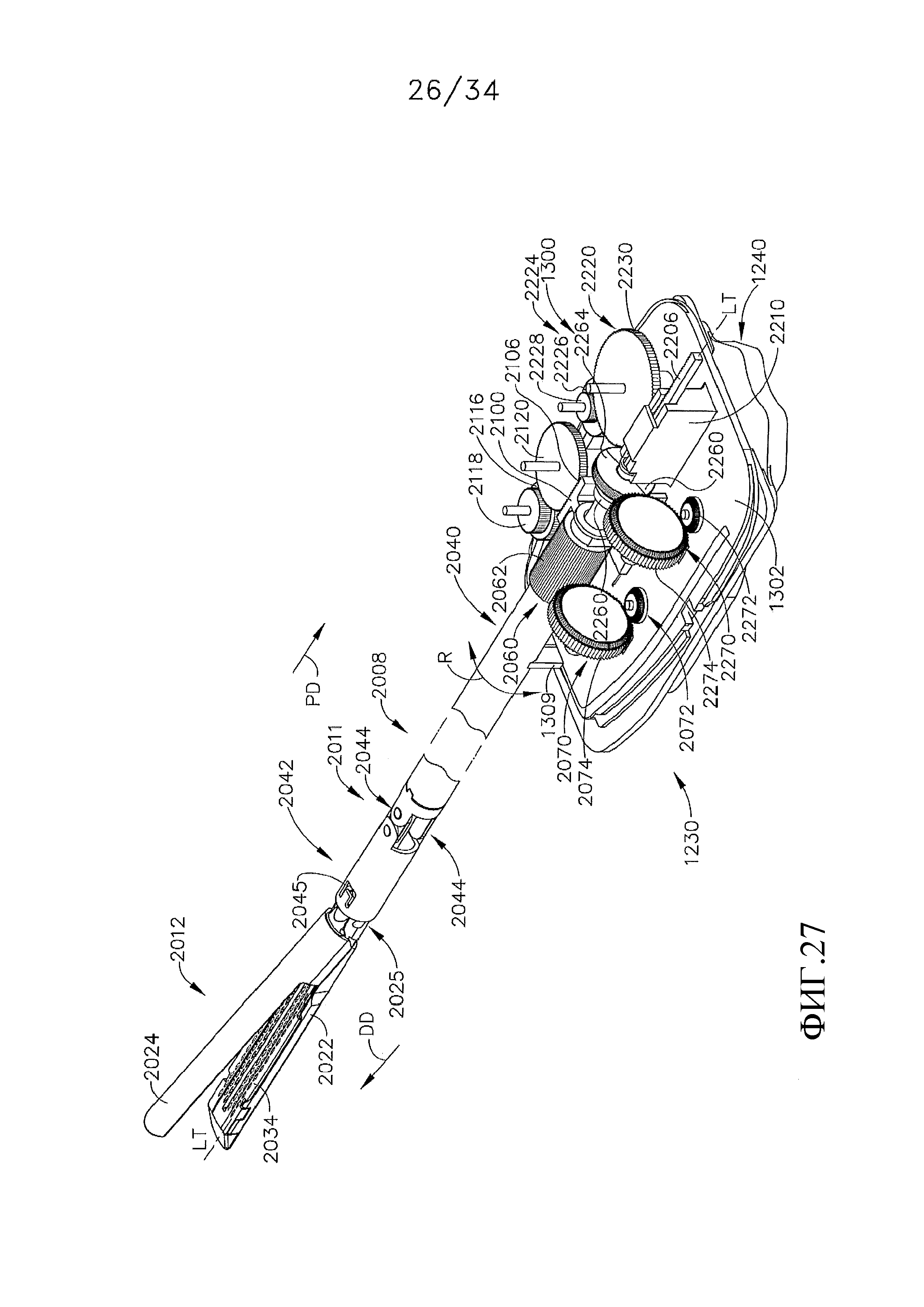
На Фиг. 27 представлен перспективный вид сзади хирургического инструмента, показанного на Фиг. 24, со снятым опорным корпусом инструмента.
На Фиг. 28 представлен перспективный вид спереди хирургического инструмента, показанного на Фиг. 24, со снятым опорным корпусом инструмента.
На Фиг. 29 представлен частичный перспективный вид снизу с пространственным разнесением компонентов варианта хирургического инструмента, показанного на Фиг. 28.
[0005] На Фиг. 30 представлен частичный вид сбоку поперечного сечения варианта хирургического инструмента, показанного на Фиг. 24.
[0006] На Фиг. 31 представлен увеличенный вид в поперечном разрезе части хирургического инструмента, показанного на Фиг. 30.
[0007] На Фиг. 32 представлен перспективный вид с пространственным разнесением компонентов монтажной части хирургического инструмента варианта, изображенном на Фиг. 24.
На Фиг. 33 представлен увеличенный перспективный вид с пространственным разнесением компонентов монтажной части инструмента, показанной на Фиг. 32.
На Фиг. 34 представлен частичный вид в поперечном разрезе части узла удлиненного стержня хирургического инструмента, изображенного на Фиг. 24.
На Фиг. 35 представлен вид сверху концевого зажима, отображающий электронный датчик в удлиненном канале в соответствии с различными вариантами осуществления.
На Фиг. 36 представлен вид снизу в перспективе картриджа со скобками, имеющего электронный датчик согласно различным вариантам осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
Это подробное описание раскрывает, в частности, элементы электронных датчиков для использования в концевом зажиме хирургического инструмента. В различных вариантах изобретения электронный датчик определяет положение пускового элемента в концевом зажиме и/или состояние картриджа в концевом зажиме. Уникальные и новые аспекты настоящего изобретения могут обеспечить эффективное использование множества различных электронных датчиков в соединении с различными типами и формами хирургических инструментов, концевых зажимов и картриджей со скобками. Несмотря на то, что приведенное в настоящем документе описание относится к манипуляциям по рассечению/сшиванию и аналогичным операциям, необходимо понимать, что данный вариант осуществления является примером и не ограничивает настоящее изобретение. Могут также использоваться другие техники сшивания тканей. Более того, в других вариантах осуществления могут использоваться различные типы концевых зажимов, такие как концевые зажимы для других типов хирургических устройств, таких как зажимы, рассекатели, клипсонакладыватели, устройства доступа, устройства для введения медикаментов/генной терапии, ультразвуковых, радиочастотных или лазерных устройств и т.д.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, полностью включенные в настоящий документ путем ссылки:
Заявка на патент США с серийным №13/118,272, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ФУНКЦИЕЙ ПЕРЕДАЧИ УСИЛИЯ»
Заявка на патент США с серийным №12/949,099, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ФУНКЦИИ ЗАПИСИ»
Заявка на патент США с серийным №11/343,803, теперь Патент США №7,845,537, озаглавленный «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ФУНКЦИИ ЗАПИСИ»
Заявка на патент США с серийным №11/343,498, теперь Патент США №7,766,210, озаглавленный «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ С ПОЛЬЗОВАТЕЛЕМ»
Заявка на патент США с серийным №11/343,573, теперь Патент США №7,416,101, озаглавленный «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И ОБРАТНОЙ СВЯЗЬЮ ПО СИЛЕ НАГРУЖЕНИЯ»
Заявка на патент США с серийным №11/344,035, теперь Патент США №7,422,139, озаглавленный «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ПОЛОЖЕНИЮ»
Заявка на патент США с серийным №11/343,447, теперь Патент США №7,770,775, озаглавленный «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И АДАПТИВНОЙ ОБРАТНОЙ СВЯЗЬЮ С ПОЛЬЗОВАТЕЛЕМ»
Заявка на патент США с серийным №11/343,562, теперь Патент США №7,568,603, озаглавленный «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И ШАРНИРНЫМ КОНЦЕВЫМ ЗАЖИМОМ»
Заявка на патент США с серийным №11/344,024, теперь Патент США №2007/0175955, озаглавленный «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И МЕХАНИЧЕСКОЙ ЗАКРЫВАЮЩЕЙ СИСТЕМОЙ»
Заявка на патент США с серийным №11/343,321, теперь Патент США №2007/0175955, озаглавленный «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С МЕХАНИЗМОМ БЛОКИРОВКИ ЗАКРЫВАЮЩЕГО ПУСКОВОГО МЕХАНИЗМА»
Заявка на патент США с серийным №11/343,563, теперь Патент США №2007/0175951, озаглавленный «ПЕРЕКЛЮЧАТЕЛЬ ПЕРЕДАЧ ДЛЯ МЕХАНИЗИРОВАННОГО ХИРУРГИЧЕСКОГО РЕЖУЩЕ-СШИВАЮЩЕГО ИНСТРУМЕНТА»
Заявка на патент США с серийным №11/344,020, теперь Патент США №7,464,846, озаглавленный «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ СЪЕМНУЮ АККУМУЛЯТОРНУЮ БАТАРЕЮ»
Заявка на патент США с серийным №11/343,439, теперь Патент США №7,644,848, озаглавленный «ЭЛЕКТРОННЫЕ БЛОКИРОВКИ И ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, В СОСТАВ КОТОРОГО ОНИ ВХОДЯТ»
Заявка на патент США с серийным №11/343,547, теперь Патент США №7,753,904, озаглавленный «ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С РУКОЯТКОЙ, КОТОРАЯ СПОСОБНА ШАРНИРНО ПОВОРАЧИВАТЬСЯ ОТНОСИТЕЛЬНО СТЕРЖНЯ»
Заявка на патент США с серийным №11/344,021, теперь Патент США №7,464,849, озаглавленный «ЭЛЕКТРОМЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЗАКРЫВАЮЩЕЙ СИСТЕМОЙ И КОМПОНЕНТАМИ ВЫРАВНИВАНИЯ УПОРНОГО ЭЛЕМЕНТА»
Заявка на патент США с серийным №11/343,546, теперь Патент США №2007/0175950, озаглавленный «ОДНОРАЗОВАЯ КАССЕТА СО СКОБКАМИ, ИМЕЮЩАЯ УПОР С ЛОКАЛИЗАТОРОМ ТКАНИ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ РЕЖУЩЕ-СШИВАЮЩИМ ИНСТРУМЕНТОМ, И МОДУЛЬНАЯ СИСТЕМА КОНЦЕВОГО ЗАЖИМА ДЛЯ НЕЕ»
Заявка на патент США с серийным №11/343,545, теперь Патент США №2007/0175949, озаглавленный «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ СИСТЕМУ ОБРАТНОЙ СВЯЗИ»
Заявка на патент США с серийным №13/021,105, теперь Патент США №2011/0121052, озаглавленный «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ФУНКЦИИ ЗАПИСИ»
Заявка на патент США с серийным №13/118,259, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ БЕСПРОВОДНУЮ СВЯЗЬ МЕЖДУ УСТРОЙСТВОМ УПРАВЛЕНИЯ СИСТЕМЫ МАНИПУЛЯТОРА И УДАЛЕННЫМ ДАТЧИКОМ»
Заявка на патент США с серийным №13/118,210, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ ОДНОРАЗОВЫЙ НАГРУЖАЮЩИЙ БЛОК С ЭЛЕКТРОПРИВОДОМ»
Заявка на патент США с серийным №13/118,194, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ ЭНДОСКОПИЧЕСКИЙ ДОПОЛНИТЕЛЬНЫЙ КАНАЛ»
Заявка на патент США с серийным №13/118,253, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ МЕХАНИЗИРОВАННЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ»
Заявка на патент США с серийным №13/118,278, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ, ФОРМИРУЮЩИЙ СКОБКИ РАЗЛИЧНОЙ ДЛИНЫ»
Заявка на патент США с серийным №13/118,190, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ МЕХАНИЗИРОВАННЫЙ ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ»
Заявка на патент США с серийным №13/118,223, озаглавленная «УПРАВЛЯЕМЫЕ МАНИПУЛЯТОРОМ СИСТЕМЫ СТЕРЖНЕВЫХ ПОВОРОТНЫХ ПРИВОДОВ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»
Заявка на патент США с серийным №13/118,263, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ФУНКЦИЯМИ ЗАПИС»
Заявка на патент США с серийным №13/118,246, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЭЛЕКТРОННО-ЛУЧЕВЫМ ДРАЙВЕРОМ»
Заявка на патент США с серийным №13/118,241, озаглавленная «ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ НАЛОЖЕНИЯ СКОБОК С ПОВОРОТНЫМИ ЭЛЕМЕНТАМИ РАЗВЕРТЫВАНИЯ СКОБОК«»
Заявка на патент США с серийным №_________, озаглавленная «УПРАВЛЯЕМЫЙ МАНИПУЛЯТОРОМ КОНЦЕВОЙ ЗАЖИМ» и поданная 13 февраля 2012 года, досье патентного поверенного № END5773USCIP6/050698CIP6.
Для общего понимания конструкции, принципов работы, производства и использования устройств и способов, описанных в настоящем документе, ниже приведено описание отдельных примеров осуществления настоящего изобретения. Один или более примеров таких вариантов осуществления представлены на сопроводительных чертежах. Специалистам в данной области будет понятно, что устройства и способы, подробно описанные в настоящем документе и представленные на сопроводительных чертежах, являются неограничивающими примерами осуществления, и объем различных вариантов осуществления настоящего изобретения определяет только формула изобретения. В настоящем документе ссылка на «различные варианты осуществления», «некоторые варианты осуществления», «один вариант осуществления», «один из вариантов осуществления» и т.п. означает, что конкретная конструктивная особенность, элемент конструкции или характеристика, описанные в связи с данным вариантом осуществления, включены по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, словосочетания «в различных вариантах», «в некоторых вариантах», «в одном из вариантов» или «в варианте» и подобные им в описании не обязательно относятся к одному и тому же варианту. Кроме того, конкретные особенности, конструкции или характеристики, показанные или описанные в связи с одним примерным вариантом, могут быть объединены с особенностями, конструкциями или характеристиками других примерных вариантов осуществления любым подходящим способом в одном или нескольких вариантах. Предполагается, что сфера действия изобретения охватывает все такие модификации и изменения.
В начале этого подробного описания пойдет речь о режуще-сшивающем хирургическом инструменте с электроприводом и усилителем в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Тем не менее, специалистам в данной области техники будет понятно, что хирургический инструмент в соответствии с различными вариантами осуществления настоящего раскрытия могут быть приведены в действие и управляться альтернативным способом, например, с помощью ручной силы и/или роботизированного управления. Как описано более подробно ниже, концевой зажим хирургического инструмента с электроприводом и усилителем альтернативно может быть приведен в действие и управляться с помощью роботизированной системы.
Режуще-сшивающий хирургический инструмент
[0008] На Фиг. 1 и 2 представлен режуще-сшивающий хирургический инструмент 10 с электроприводом и усилителем в соответствии с различными вариантами осуществления настоящего изобретения. Представленный на чертеже вариант осуществления представляет собой эндоскопический хирургический инструмент 10, и в целом варианты осуществления инструмента 10, описанные в настоящем документе, представляют собой эндоскопические хирургические режуще-сшивающие инструменты. Необходимо отметить, что, в соответствии с другими вариантами осуществления настоящего изобретения, инструмент 10 может также являться неэндоскопическим режущим хирургическим инструментом, таким как инструмент для лапароскопии. К тому же обычному специалисту в данной области будет понятно, что различные способы и устройства, раскрытые в настоящем документе, можно применять в рамках множества хирургических процедур, а также сфер применения, включая, например, связанные с проведением открытых хирургических процедур. По ходу данного подробного описания специалисты с достаточным опытом работы в данной области смогут еще в большей мере оценить, что разнообразные аппараты, описанные в данном документе, могут быть введены в тело любым способом, таким как через естественные отверстия, через разрез или пункционное отверстие, образованное в тканях, и т.п. Рабочие органы или дистальные рабочие насадки таких аппаратов могут быть введены непосредственно в тело пациента либо через устройство доступа, имеющего рабочий канал, через который можно ввести концевой зажим и удлиненный стержень хирургического аппарата.
Хирургический инструмент 10, изображенный на Фиг. 1 и 2, содержит рукоятку 6, стержень 8 и шарнирный концевой зажим 12, соединенный со стержнем 8 шарнирным сочленением 14. Рядом с рукояткой 6 может располагаться устройство управления шарнирным сочленением 16, обеспечивающее вращение концевого зажима 12 на шарнирном сочленении 14. Необходимо принять во внимание, что различные варианты осуществления могут включать неповоротный концевой зажим и, следовательно, могут не иметь шарнирного сочленения 14 или устройства управления шарнирным сочленением 16.
В проиллюстрированном варианте концевой зажим 12 выполнен с возможностью действовать в качестве эндокатера для зажима, рассечения и скрепления тканей скобками. В других вариантах осуществления для сшивания или склеивания рассеченных тканей могут использовать другие техники. Например, могут также применяться концевые зажимы, использующие для стягивания рассеченной ткани энергию радиоволн или клеящие вещества. В патенте США №5709680 под названием «Электрохирургическое гемостатическое устройство», Йетс и соавторы и в патенте США №5688270 под названием «Электрохирургическое гемостатическое устройство с электродами с выемкой и/или изогнутыми электродами», Йетс и соавторы, которые во всей своей полноте включены в настоящий документ посредством ссылки, описываются режущие инструменты, которые используют радиочастоты для герметизации рассеченных тканей. В заявке на патент США сер. №11/267811, Морган и соавторы и в заявке на патент США сер. №11/267363, Шелтон и соавторы, которые также во всей своей полноте включены в настоящий документ посредством ссылки, описываются режущие инструменты, в которых для сшивания рассеченных тканей используются клеющие вещества.
Рукоятка 6 инструмента 10 может включать в себя закрывающее пусковое устройство 18 и пусковое устройство 20 для активации концевого зажима 12. Следует понимать, что инструменты, имеющие концевые зажимы и предназначенные для выполнения различных хирургических манипуляций, могут иметь различное количество или типы пусковых элементов или иных соответствующих средств управления концевым зажимом 12. Как показано на чертеже, концевой зажим 12 отделен от рукоятки 6 предпочтительно удлиненным стержнем 8. В одном варианте осуществления врач или оператор инструмента 10 может шарнирно поворачивать концевой зажим 12 относительно стержня 8 с помощью устройства 16 управления, шарнирным поворотом, как более подробно описано в находящейся на рассмотрении заявке на патент США №7,670,334, поданной 2 марта 2010 г, под названием «Хирургический инструмент с шарнирно-поворачивающимся концевым зажимом», изобретателей Джефри C. Хюэйл и соавторов, которая включена в настоящее описание путем отсылки.
В приведенном примере концевой зажим 12, помимо прочего, включает в себя канал для скоб 22 и поворотный зажимной элемент, например упор 24, между которыми поддерживается расстояние, обеспечивающее эффективное сшивание и рассечение ткани, зафиксированной в концевом эффекторе 12. Рукоятка 6 включает в себя рукоятку пистолетного типа 26, к которой хирург подтягивает находящееся на шарнире закрывающее пусковое устройство 18 для фиксации или закрытия упора 24 к каналу для скоб 22 концевого зажима 12, чтобы тем самым зажать ткань, находящуюся между упором 24 и каналом 22. Пусковое устройство 20 расположено снаружи относительно закрывающего пускового устройства 18. Как только закрывающее пусковое устройство 18 фиксируется в закрытом положении, как дополнительно описано ниже, пусковое устройство 20 может без усилий прижаться к пистолетной рукоятке 26, поэтому оператор может осуществлять такую манипуляцию одной рукой. Затем оператор может притянуть находящееся на шарнире пусковое устройство 20 к пистолетной рукоятке 26 для запуска сшивания и рассечения ткани, зафиксированной в концевом зажиме 12. В других вариантах осуществления помимо упора 24 могут использоваться другие зажимные элементы, например вторая бранша и т.д.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к части, находящейся ближе к врачу, а термин «дистальный» относится к части, удаленной от врача. Предлагается также для удобства и ясности применительно к чертежам использовать в настоящем документе такие пространственные термины, как «вертикальный», «горизонтальный», «верх» и «низ». Однако хирургические инструменты можно использовать во многих ориентациях и положениях, поэтому указанные термины не являются абсолютными и/или не ограничивают настоящее изобретение.
В проиллюстрированном варианте закрывающее пусковое устройство 18 может быть шарнирно повернуто в первую очередь. Когда хирурга устраивает положение концевого зажима 12, он может оттянуть закрывающее пусковое устройство 18 в фиксированное положение полного закрытия, вплотную к пистолетной рукоятке 26. После этого можно активировать пусковое устройство 20. Пусковое устройство 20 возвращается в открытое положение (как показано на Фиг. 1 и 2), когда хирург устраняет давление, как более подробно описано ниже. Для того чтобы разблокировать закрывающее пусковое устройство 18, необходимо нажать кнопку фиксации на рукоятке 6.
На Фиг. 3-6 показаны варианты осуществления вращающегося концевого зажима 12 и стержня 8 согласно различным вариантам осуществления изобретения. На Фиг. 3 представлен разобранный вид концевого зажима 12 в соответствии с различными вариантами осуществления. Как показано на чертеже, концевой зажим 12, помимо ранее упомянутого канала 22 и упора 24, может содержать режущий инструмент 32, салазки 33, съемный картридж со скобками 34, установленный в желобе 22, и винтовой стержень 36. Режущий инструмент 32 может, например, представлять собой скальпель. Упор 24 может открываться и закрываться на оси шарнира 25, соединенной с проксимальным концом желоба 22. Упор 24 также на проксимальном конце может иметь петлю 27, вставленную в часть элемента закрытия (описан ниже) для открывания и закрывания упора 24. Когда закрывающее пусковое устройство 18 приводится в действие, то есть отводится пользователем инструмента 10, упор 24 может поворачиваться вокруг оси шарнира 25 в фиксированное или закрытое положение. Если фиксация концевого зажима 12 является удовлетворительной, оператор может привести в действие пусковое устройство 20, при этом, как более подробно описано ниже, скальпель 32 и салазки 33 перемещаются вдоль канала 22, рассекая ткани, зафиксированные концевым зажимом 12. В результате движения салазок 33 вдоль канала 22 скобы (не показаны) из картриджа 34 прошивают рассеченные ткани, упираясь в прижатый упор 24, который сгибает их, фиксируя рассеченные ткани. В некоторых вариантах осуществления салазки 33 могут являться составным компонентом картриджа 34. Патент США 6,978,921, озаглавленный «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОННО-ЛУЧЕВЫМ ЭЛЕМЕНТОМ РЕЗАНИЯ/СШИВАНИЯ», ИЗОБРЕТАТЕЛЕЙ ШЕЛТОНА, IV И СОАВТОРОВ, который включен в настоящее описание путем отсылки, обеспечивает дополнительные сведения о такого рода двухходовых режущих и сшивающих инструментах. Салазки 33 могут являться частью картриджа 34, при этом, когда скальпель 32 втягивается после рассечения ткани, салазки 33 не втягиваются.
[0009] На Фиг. 4 и 5 представлено перспективное изображение в разобранном виде, а на Фиг. 6 представлен вид сбоку концевого зажима 12 и стержня 8 в соответствии с различными вариантами осуществления изобретения. Как показано в проиллюстрированном варианте осуществления, стержень 8 может включать проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, связанные шарнирным звеном 44. Дистальная закрывающая трубка 42 имеет отверстие 45, в которое вставляют язычок 27 на упоре 24 для открытия и закрытия упора 24, как более подробно описано ниже. Внутри закрывающих трубок 40 и 42 может находиться проксимальная сердцевинная трубка 46. Внутри проксимальной сердцевинной трубки 46 может находиться основной вращательный (или проксимальный) приводной стержень 48, который сообщается с вторичным (или дистальным) приводным стержнем 50 с помощью узла конических зубчатых колес 52. Вторичный приводной стержень 50 соединен с ведущим зубчатым колесом 54, которое зацепляет проксимальное ведущее зубчатое колесо 56 винтового стержня 36. Вертикальное коническое зубчатое колесо 52b может находиться и поворачиваться в отверстии 57 на дистальном конце проксимальной сердцевинной трубки 46. Вторичный приводной стержень 50 и ведущие зубчатые колеса 54 и 56 могут быть заключены в дистальную сердцевинную трубку 58. В совокупности основной приводной стержень 48, вспомогательный приводной стержень 50 и блок сочленения (например, блок конических зубчатых колес 52a-c) в настоящем документе в некоторых случаях упоминаются как «блок основного приводного стержня».
[0010] Втулка 38, расположенная на дистальном конце канала для скоб 22, принимает винтовой стержень 36, что позволяет винтовому стержню 36 свободно вращаться относительно канала 22. Винтовой стержень 36 может стыковаться с резьбовым отверстием (не показано) скальпеля 32 таким образом, что при вращении стержня 36 скальпель 32 перемещается дистально или проксимально (в зависимости от направления вращения) в желобе для скобок 22. Соответственно, когда основной приводной стержень 48 вращается при активации пускового устройства 20 (как более подробно описано ниже), узел конических зубчатых колес 52a–c вызывает вращение вторичного приводного стержня 50, который, в свою очередь, вследствие зацепления ведущих зубчатых колес 54 и 56, вызывает вращение винтового стержня 36, что вынуждает элемент продвижения скальпеля 32 перемещаться продольно вдоль канала 22 и рассекать ткань, зафиксированную концевым зажимом 12.
[0011] В различных вариантах осуществления канал для скобок 22 имеет проксимальный конец 23а и дистальный конец 23b и скальпель или режущий элемент 32, выполненный с возможностью перемещения в продольном направлении в канале 22 между проксимальным концом 23а и дистальным концом 23b, когда к режущему элементу 32 прилагается приводное движение. В других вариантах осуществления канал для скобок 22 имеет внутреннюю поверхность 28 и паз 30, который проходит через внутреннюю поверхность 28. См. Фиг. 12. Скальпель 32 может перемещаться вдоль паза 30 в продольном направлении в канале для скобок 22. Салазки 33 могут быть выполнены, например, из пластика и могут иметь наклонную дистальную поверхность. Когда салазки 33 пересекают канал 22, наклоненная вперед поверхность может поднять вверх или вытолкнуть скобки из кассеты со скобками через зажатую ткань вплотную к упору 24. Упор 24 загибает скобы, скрепляя таким образом рассеченную ткань. Когда скальпель 32 оттягивается назад, скальпель 32 и салазки 33 могут выйти из зацепления, в результате чего салазки 33 останутся в дистальном конце канала 22 или салазки могут вернуться вместе со скальпелем.
Как описано выше, из-за отсутствия обратной связи от операции резания/сшивания среди врачей не пользуются признанием эндокатеры с электроприводом, с помощью которых рассечение/сшивание производится всего лишь нажатием кнопки. В отличие от этого, варианты осуществления настоящего изобретения представляют эндокатер с электроприводом, обеспечивающий пользователю обратную связь о размещении, усилии и/или положении режущего инструмента 32 в концевом зажиме 12.
На Фиг. 7-10 представлен пример варианта осуществления автоматического эндокатера, и в частности его рукоятки, который предоставляет пользователю обратную связь о приведении в рабочее положение и силе нагрузки на режущий инструмент 32 в концевом зажиме 12. Кроме того, данный вариант осуществления может использовать силу, приложенную пользователем во время нажатия пускового устройства 20, для увеличения производительности устройства (так называемый режим «усилителя»). Данный вариант осуществления может использоваться с вращающимся концевым зажимом 12 и стержнем 8 в вариантах осуществления изобретения, описанных выше.
Как показано в проиллюстрированном варианте осуществления, рукоятка 6 содержит детали внешней нижней стороны 59, 60 и детали внешней верхней стороны 61, 62, которые вплотную прилегают друг к другу, формируя внешнюю часть рукоятки 6. В части пистолетной рукоятки 26 рукоятки 6 может быть размещена аккумуляторная батарея 64, например, литий-ионная аккумуляторная батарея. Аккумуляторная батарея 64 питает электродвигатель 65, расположенный в верхней части пистолетной рукоятки 26 рукоятки 6. Согласно различным вариантам осуществления двигатель 65 может быть приводным щеточным двигателем постоянного тока с максимальной скоростью вращения приблизительно 5000 оборотов в минуту. Двигатель 65 может приводить в движение блок 90° конических зубчатых колес 66, содержащий первое коническое зубчатое колесо 68 и второе коническое зубчатое колесо 70. Узел конических зубчатых колес 66 может приводить в действие узел планетарной передачи 72. Узел планетарной передачи 72 может включать в себя ведущую шестерню 74, соединенную с приводным стержнем 76. Ведущая шестерня 74 может приводить в действие сопряженное кольцевое зубчатое колесо 78, которое через приводной стержень 82 приводит в действие барабан с винтовой зубчатой передачей 80. Кольцо 84 может быть навинчено на барабан с винтовой зубчатой передачей 80. Таким образом, при вращении двигателя 65 кольцо 84 двигается вдоль барабана с винтовым зубчатым колесом 80 с помощью установленного блока конических зубчатых колес 66, блока планетарных шестерней 72 и кольцевого зубчатого колеса 78.
Рукоятка 6 может также включать датчик запуска двигателя 110 (см. Фиг. 10), связанный с пусковым устройством 20, для определения того, что пусковое устройство 20 притянуто (или закрыто) оператором к пистолетной рукоятке 26 рукоятки 6, и тем самым инициировать рассечение/сшивание ткани концевым зажимом 12. Датчик 110 может представлять собой пропорциональный датчик, например реостат или резистор переменного сопротивления. Когда пусковое устройство 20 находится в прижатом состоянии, датчик 110 определяет перемещение и выдает электрический сигнал, указывающий на необходимость подачи электрического напряжения (или питания) к электродвигателю 65. Если датчик 110 является резистором переменного сопротивления или аналогичным устройством, скорость вращения электродвигателя 65 может быть по существу пропорциональна величине смещения пускового устройства 20. Таким образом, когда оператор слегка прижимает или закрывает пусковое устройство 20, двигатель 65 вращается сравнительно медленно. Когда пусковое устройство 20 полностью прижато (или находится в полностью закрытом положении), вращение двигателя 65 максимально. То есть, чем сильнее пользователь прижимает пусковое устройство 20, тем большее напряжение подается на двигатель 65, обеспечивая большую скорость вращения.
[0012] Рукоятка 6 может включать в себя срединную часть рукоятки 104, примыкающую к верхней части пускового устройства 20. Рукоятка 6 также может содержать смещающую пружину 112, расположенную между опорами на срединной части рукоятки 104 и пусковом устройстве 20. Смещающая пружина 112 может смещать пусковое устройство 20 в полностью открытое положение. Таким образом, когда оператор разблокирует пусковое устройство 20, смещающая пружина 112 переводит пусковое устройство 20 в открытое положение, тем самым предупреждая активацию датчика 110, что приводит к остановке вращения электродвигателя 65. Кроме того, благодаря наличию смещающей пружины 112, каждый раз, когда пользователь закрывает пусковое устройство 20, он чувствует сопротивление закрытию, что обеспечивает пользователю обратную связь, позволяющую контролировать вращения электродвигателя 65. Также оператор может прекратить воздействие на пусковое устройство 20 и тем самым прекратить воздействие на датчик 110 и в результате остановить электродвигатель 65. Таким образом, пользователь может остановить работу концевого зажима 12, что позволяет обеспечить оператору возможность контролировать операцию по рассечению/сшиванию.
В различных вариантах дистальный конец барабана с винтовым зубчатым колесом 80 содержит дистальный приводной стержень 120, который приводит в действие кольцевое зубчатое колесо 122, сопрягающееся с ведущей шестерней 124. Ведущая шестерня 124 соединяется с основным приводным стержнем 48 блока основного приводного стержня. Таким образом, вращение двигателя 65 вызывает вращение группы основного приводного стержня, что приводит в действие концевой зажим 12, как описано выше.
Кольцо 84, навинченное или иным образом присоединенное к барабану с винтовым зубчатым колесом 80, может содержать опору 86, которая установлена в паз 88 кулисы 90. См. Фиг. 8 и 9. Кулиса 90 содержит отверстие 92 на противоположном конце 94 для удержания шарнирного штифта 96, который закреплен между деталями внешней стороны рукоятки 59, 60. Шарнирный штифт 96 также проходит через отверстие 100 в пусковом устройстве 20 и отверстие 102 в срединной части рукоятки 104.
Кроме того, рукоятка 6 может включать в себя датчик обратного действия (или датчик окончания хода) 130 и датчик останова электродвигателя (или начала хода) 142. См. Фиг. 10. В различных вариантах осуществления датчик обратного действия 130 может представлять собой концевой переключатель, расположенный на дистальном конце барабана с винтовой зубчатой передачей 80, при этом кольцо 84, навинченное на барабан с винтовой зубчатой передачей 80, контактирует и приводит в действие датчик обратного действия 130, когда кольцо 84 достигает дистального конца барабана с винтовой зубчатой передачей 80. При активации датчик обратного действия 130 направляет сигнал на электродвигатель 65 для изменения направления его вращения и втягивания скальпеля 32 концевого зажима 12 после операции рассечения.
Датчик останова двигателя 142 может являться, например, нормально замкнутым концевым выключателем. В различных вариантах осуществления он может располагаться на проксимальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84 включает выключатель 142, когда кольцо 84 достигает проксимального конца барабана с винтовым зубчатым колесом 80.
Когда во время работы оператор инструмента 10 оттягивает назад пусковое устройство 20, датчик 110 определяет введение в действие пускового устройства 20 и направляет сигнал к электродвигателю 65, активируя его вращение вперед, например, со скоростью, пропорциональной силе, с которой оператор оттягивает пусковое устройство 20. Вращение электродвигателя 65 вперед, в свою очередь, вызывает вращение кольцевого зубчатого колеса 78 на дистальном конце узла планетарной передачи 72, таким образом приводя к вращению барабана с винтовой зубчатой передачей 80 и дистальному продвижению кольца 84, навинченного на барабан с винтовой зубчатой передачей 80, вдоль барабана с винтовой зубчатой передачей 80. Вращение барабана с винтовой зубчатой передачей 80 также приводит в действие узел основного приводного стержня, как описано выше, что, в свою очередь, приводит в рабочее положение скальпель 32 на концевом зажиме 12, то есть скальпель 32 и салазки 33 проходят вдоль канала 22, при этом рассекается ткань, захваченная концевым зажимом 12. Кроме того, в вариантах осуществления, где используется сшивающий концевой зажим 12, происходит сшивание ткани.
К моменту завершения манипуляции концевого зажима 12 по рассечению/сшиванию ткани кольцо 84 на барабане с винтовым зубчатым колесом 80 достигает дистального конца барабана 80, вызывая включение датчика обратного движения двигателя 130, который направляет сигнал двигателю 65 об изменении направления вращения. Это, в свою очередь, вызывает втягивание скальпеля 32 и вынуждает кольцо 84 на барабане с винтовым зубчатым колесом 80 двигаться в обратном направлении к проксимальному кольцу барабана с винтовым зубчатым колесом 80.
[0013] Срединная часть рукоятки 104 (Фиг. 7) содержит тыльное плечо 106, которое зацепляется за кулису 90, что наилучшим образом показано на Фиг. 8. Срединная часть рукоятки 104 также имеет ограничитель рабочего хода 107, сцепленный с пусковым устройством 20. См. Фиг. 10. Движение кулисы 90 контролируется вращением электродвигателя 65, как описано выше. Когда кулиса 90 вращается против часовой стрелки, в то время как кольцо 84 продвигается от проксимального кольца барабана с винтовой зубчатой передачей 80 к его дистальному кольцу, срединная часть рукоятки 104 может свободно вращаться против часовой стрелки. Таким образом, когда пользователь притягивает пусковое устройство 20, оно сцепляется с ограничителем хода вперед 107 срединной части бранши 104, вызывая вращение серединной части бранши 104 против часовой стрелки. Однако вследствие сцепления тыльного плеча 106 с кулисой 90 срединная часть бранши 104 может вращаться против часовой стрелки настолько, насколько позволяет кулиса 90. Таким образом, если по каким-либо причинам необходимо остановить вращение двигателя 65, кулиса 90 остановит вращение и пользователь не сможет притягивать пусковое устройство 20 дальше, так как срединная часть бранши 104 не сможет вращаться против часовой стрелки вследствие удержания ее кулисой 90.
На Фиг. 10A и 10B представлены два состояния параметрического датчика, который может использоваться в качестве датчика 110 работы двигателя в соответствии с различными вариантами осуществления настоящего изобретения. Датчик 110 может содержать лицевой участок 280, первый электрод (А) 282, второй электрод (В) 284 и сжимаемый диэлектрический материал 286 между электродами 282, 284, такой как, например, электроактивный полимер (ЭАП). Датчик 110 может быть установлен так, чтобы торцевая часть 280 контактировала с пусковым устройством 20, когда он притянут. Соответственно, когда пусковое устройство 20 притянуто, диэлектрический материал 286 сжимается, как показано на Фиг. 10B, так, что электроды 282 и 284 сближаются. Так как расстояние b между электродами 282 и 284 напрямую соотносится с полным сопротивлением между электродами 282 и 284, то очевидно, что чем больше расстояние, тем больше полное сопротивление, и чем меньше расстояние, тем меньше полное сопротивление. Таким образом, величина, на которую сжимается диэлектрик 286 во время прижимания пускового устройства 20 (обозначена как сила F на Фиг. 42), пропорциональна полному сопротивлению между электродами 282 и 284, что можно использовать для пропорционального управления двигателем 65.
[0014] Компоненты примера системы закрытия (или фиксации) упора 24 концевого зажима 12 путем притягивания закрывающего пускового устройства 18 также показаны на Фиг. 7-10. В показанном варианте осуществления система закрытия содержит вилку сцепления 250, соединенную с закрывающим пусковым элементом 18 шарнирным штифтом 251, вставленным через центрированные отверстия как в закрывающем пусковом элементе 18, так и в вилке сцепления 250. Шарнирный штифт 252, вокруг которого поворачивается закрывающий пусковой элемент 18, вставлен через другое отверстие в закрывающем пусковом элементе 18, который смещен относительно места, в котором штифт 251 вставлен через закрывающий пусковой элемент 18. Таким образом, притягивание закрывающего пускового элемента 18 вызывает вращение против часовой стрелки верхней части закрывающего пускового элемента 18, к которому с помощью штифта 251 прикреплена вилка сцепления 250. Дистальный конец вилки сцепления 250 соединен с помощью штифта 254 с первым закрывающим кронштейном 256. Первый закрывающий кронштейн 256 соединен со вторым закрывающим кронштейном 258. Вместе закрывающие кронштейны 256 и 258 определяют отверстие, в которое вставлен и удерживается проксимальный конец проксимальной закрывающей трубки 40 (см. Фиг. 4), при этом продольное движение закрывающих кронштейнов 256 и 258 вызывает продольное перемещение проксимальной закрывающей трубки 40. Инструмент 10 также включает в себя закрывающий шток 260, установленный внутри проксимальной закрывающей трубки 40. Закрывающий шток 260 может включать в себя окно 261, в которое вставляется опора 263 на одной из внешних деталей рукоятки, такой как деталь внешней нижней стороны 59 в приведенном варианте осуществления, жестко связывая закрывающий шток 260 с рукояткой 6. Таким образом, проксимальная закрывающая трубка 40 способна перемещаться продольно по отношению к закрывающему штоку 260. Закрывающий стержень 260 может также включать в себя дистальный буртик 267, который прилегает к полости 269 в проксимальной сердцевинной трубке 46 и удерживается заглушкой 271 (см. Фиг. 4).
Во время работы, когда зажим 250 поворачивается вследствие притягивания закрывающего пускового устройства 18, закрывающие кронштейны 256 и 258 принуждают проксимальную закрывающую трубку 40 двигаться в дистальном направлении (т.е. в направлении от конца рукоятки инструмента 10), что вызывает движение в дистальном направлении дистальной закрывающей трубки 42 и вращение упора 24 вокруг оси шарнира 25 до фиксированного или закрытого положения. Когда закрывающее пусковое устройство 18 разблокировано, проксимальная закрывающая трубка 40 плавно передвигается в проксимальном направлении, что вызывает движение дистальной закрывающей трубки 42 в проксимальном направлении, и вследствие того, что петля 27 вставлена в отверстие 45 дистальной закрывающей трубки 42, вызывает поворот упора 24 вокруг оси шарнира 25 до открытого или разблокированного положения. Таким образом, притягивая и блокируя закрывающее пусковое устройство 18, оператор может зажимать ткань между упором 24 и желобом 22, а также освобождать ее после рассечения/сшивания, вернув закрывающее пусковое устройство 20 из закрытого положения.
[0015] На Фиг. 11 представлена принципиальная схема электрической цепи инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Когда оператор начинает тянуть за пусковое устройство 20 после блокировки закрывающего пускового устройства 18, активируется датчик 110, открывая путь току. Если нормально разомкнутый переключатель датчика обратного действия 130 разомкнут (что означает, что не достигнут конец хода концевого зажима), ток потечет к однополюсному двухпозиционному реле 132. Так как переключатель датчика обратного действия 130 не замкнут, катушка 134 реле 132 не будет находиться под напряжением, то есть реле 132 будет оставаться в невозбужденном состоянии. В цепи также установлен датчик блокировки картриджа 136. Если в концевой зажим 12 вставлен картридж со скобками 34, датчик 136 будет находиться в закрытом состоянии, пропуская ток. И наоборот, если в концевой зажим 12 не вставлен картридж со скобами 34, датчик 136 будет открытым, тем самым препятствуя питанию двигателя 65 от батареи 64.
При наличии кассеты со скобками 34 датчик 136 замыкается, что подает напряжение на однополюсное однопозиционное реле 138. Когда реле 138 находится в возбужденном состоянии, ток протекает через реле 136 и датчик резистора переменного сопротивления 110 к электродвигателю 65 через двухполюсное двухпозиционное реле 140, таким образом питая электродвигатель 65 и позволяя ему вращаться вперед.
Когда концевой зажим 12 достигает конца хода, активируется датчик обратного действия 130, замыкая переключатель 130 и пропуская ток к реле 134. Это приводит к тому, что реле 134 переходит в возбужденное состояние (не показано на Фиг. 11), при этом ток течет не через датчик блокировки картриджа 136 и резистор переменного сопротивления 110, а проходит как к закрытому в обычном состоянии двухполюсному реле на два направления 142, так и к двигателю 65, но через реле 140, что вынуждает двигатель 65 поменять направление вращения.
Поскольку переключатель датчика останова двигателя 142 в обычном состоянии закрыт, ток пойдет назад к реле 134, обеспечивая его замыкание до тех пор, пока не откроется переключатель 142. Когда скальпель 32 полностью втянут, переключатель датчика останова двигателя 142 активируется и открывается, прекращая тем самым подачу питания на двигатель 65.
В других вариантах осуществления вместо пропорционального датчика 110 может использоваться двухпозиционный датчик. В таких вариантах осуществления скорость вращения двигателя 65 может не быть пропорциональной силе, приложенной оператором. Как правило, двигатель 65 может вращаться в целом с постоянной скоростью. Тем не менее оператор получает обратную связь относительно усилия, так как пусковое устройство 20 включено в цепь зубчатых передач привода.
Датчики положения пускового элемента и состояния картриджа
[0016] В других вариантах, режуще-сшивающий хирургический инструмент 10 может не содержать датчик движения двигателя 110, датчик обратного движения двигателя 130 и/или датчик останова 142, как описано выше. В других вариантах осуществления, например, хирургические инструмент 10 может использовать электронный датчик 150 для определения положения пускового элемента в концевом зажиме 12 и/или состояния или наличия картриджа 34 в концевом зажиме 12. Для целей описания проиллюстрированного варианта осуществления режущий элемент 32, салазки 33, приводной стержень 36 и другие элементы, выполненные с возможностью перемещаться в концевом зажиме 12, все вместе обозначаются здесь как пусковые элементы. Как показано на Фиг. 14, в одной форме электронный датчик 150 содержит резистивный элемент 152, который поддерживается в пределах концевого зажима 12 хирургического инструмента 10. Резистивный элемент 152 может быть установлен на канале со скобками 22, зажимном элементе 20, картридже со скобками 34 или другом элементе в концевом зажиме 12. Когда пусковой элемент перемещается в продольном направлении через концевой зажим 12, пусковой элемент может подвижно контактировать с резистивным элементом 152.
Как указано выше, в различных вариантах осуществления, резистивный элемент 152 электронного датчика 150 поддерживается удлиненным каналом 22. Например, по меньшей мере, в одном варианте осуществления резистивный элемент 152 прикреплен к удлиненному каналу 22 с помощью клеющего вещества. В других вариантах осуществления резистивный элемент 152 может быть прикреплен к компоненту в удлиненном канале 22. Как показано на Фиг. 12, резистивный элемент 152 может быть расположен на внутренней поверхности 28 канала со скобками 22 таким образом, что пусковой элемент контактирует с резистивным элементом 152, во время продольного перемещения пускового элемента в канале со скобками 22. В альтернативных вариантах осуществления резистивный элемент 152 поддерживается или иным образом прикреплен к картриджу 34. Как показано на Фиг. 13, резистивный элемент 152 может быть установлен на корпусе 35 картриджа со скобками 34. Например, резистивный элемент 152 может быть прикреплен к нижней поверхности корпуса картриджа 35 с помощью соответствующего клея. В других вариантах осуществления резистивный элемент 152 может быть установлен в элементе паза (не показан), образованном в нижней поверхности корпуса картриджа 35, или иным образом удерживаться на месте с помощью крепежных приспособлений, образованных в нем. В варианте, показанном на Фиг. 13, резистивный элемент 152 расположен в корпусе 35 картриджа 34 таким образом, что часть пускового элемента контактирует с резистивным элементом 152, когда пусковой элемент перемещается в продольном направлении в канале для скобок 22.
В различных вариантах осуществления резистивный элемент 152 электронного датчика 150 содержит резистор 154 или множество резисторов 154. Например, резистивный элемент 152 может содержать схему с множеством резисторов 154а, 154b, 154с и т.д. и множество узлов 156а, 156b, 156с и т.д. Ссылаясь на Фиг. 12, узел 156 может быть расположен между резисторами 154. Например, первый узел 156a расположен между первым резистором 154а и вторым резистором 154b; второй узел 156b расположен между вторым резистором 154b и третьим резистором 154с; а третий узел 156с расположен между третьим резистором 154с и четвертым резистором 154d; и т.д. Другими словами, узел 156 может быть расположен между каждыми двумя последовательными резисторами 154 в цепи резистивного элемента 152. Напряжение в каждом узле 156 является равномерным или по существу равномерным. В то время как резисторы 156 являются одинаковыми, напряжение в каждом узле 156 отличается от напряжения в других узлах 156. Как показано на Фиг.12, резисторы 154а, 154b, 154с, …, 154z могут быть расположены в параллельной конфигурации таким образом, чтобы эквивалентное сопротивление (REq) резистивного элемента 152 можно было вычислить по формуле:
1/REq=1/Ra+1/Rb+1/Rc+…+1/Rz,
где Ra - сопротивление в резисторе 154a, Rb - сопротивление в резисторе 154b, Rc - сопротивление в резисторе 154c, а Rz - сопротивление в самом дистальном резисторе 154z резистивного элемента 152. Сопротивление может измеряться в Оммах (Ω). В альтернативном варианте резисторы 154а, 154b, 154с, …, 154z могут быть расположены в последовательной конфигурации таким образом, чтобы эквивалентное сопротивление (REq) резистивного элемента 152 можно было вычислить по формуле:
REq=Ra+Rb+Rc+…+Rz.
Как описано выше, пусковой элемент концевого зажима 12 находится в подвижном контакте с резистивным элементом 152, когда пусковой элемент перемещается между проксимальным концом 23а канала со скобками 22 и дистальным концом 23b канала со скобками 22. В одном варианте осуществления пусковой элемент может скользить вдоль поверхности резистивного элемента 152, когда салазки 33 и скальпель 32 приводятся в движение в удлиненном канале 22. В другом варианте осуществления пусковой элемент может контактировать с выступами резистивного элемента 152, когда салазки 33 и скальпель 32 приводятся в движение в удлиненном канале 22. Как пусковой элемент проходит через канал 22 со скобками и подвижно контактирует с резистивным элементом 152, резистивный элемент 152 генерирует выходные сигналы, указывающие на положение пускового элемента в удлиненном канале 22. Выходные сигналы, генерируемые резистивным элементом 152, могут представлять собой измерения напряжения (или мощности) вдоль резистивного элемента 152. Например, резистивный элемент 152 может генерировать сигнал, указывающий напряжение в каждом узле 156 между последовательными резисторами 154.
В различных вариантах, относящихся к Фиг. 12, пусковой элемент может подвижно контактировать с резистивным элементом 152 таким образом, что пусковой элемент будет отсекать части резистивного элемента 152. Например, режущий элемент 32 может проходить через части резистивного элемента 152, когда режущий элемент 32 перемещается в продольном направлении через удлиненный канал 22 в ответ на приводные движения, приложенные к нему. По меньшей мере в одном варианте осуществления, например, резистивный элемент 152 может быть расположен на внутренней поверхности 28 удлиненного канала 22 и ориентирован таким образом, что резистивный элемент 152, по меньшей мере, частично перекрывает паз 30, проходящий на внутренней поверхности 28 канала 22. Как описано выше, паз 30 может быть выполнен с возможностью приема режущего элемента 32, когда пусковой элемент 20 приводится в действие, в результате чего режущий элемент 32 и салазки 33 перемещаются в продольном направлении вдоль канала 22. Например, режущий элемент 32 может перемещаться из первого положения в ближайшем месте вдоль паза 30 во второе положение в промежуточном месте вдоль паза 30, а из второго положения в третье положение в дальнем положении вдоль паза 30. Первое положение может совпадать с первым узлом 156а, второе положение может совпадать с другим узлом 156m, а третье положение может совпадать с другим узлом 156z. Когда режущий элемент 32 перемещается в продольном направлении между узлами вдоль паза 30, режущий элемент 32 рассекает ткани, зажатые между каналом 22 и упором 20. Режущий элемент 32 также рассекает части резистивной полосы 152, которая покрывает часть паза 30, по которому перемещается режущий элемент 32. Как показано на Фиг. 12, режущий элемент 32 расположен между проксимальным концом 23а удлиненного канала 22 и дистальным концом 23b канала 22. Как показано на этом чертеже, режущий элемент 32 имеет пересеченные узлы 156а, 156b и 156c. Кроме того, режущий элемент 32 рассек ближние резисторы 154a, 154b и 154с; тем не менее, промежуточные и дистальный резисторы 154m, 154n и 154z, в частности, остались нетронутыми. Следует иметь в виду, что, когда режущий элемент 32 выдвигается в дистальном направлении в канале 22 со скобками из исходного положения в его конечное положение, режущий элемент будет пересекать каждый узел 156 и разрывать каждый резистор 154 резистивного элемента 152 во время хода активации.
Когда режущий элемент 32 рассекает части резистивной полосы 152, режущий элемент может разрезать резисторы 154, расположенные вдоль части цепи резистивного элемента 152. Например, как показано на Фиг. 12, режущий элемент 32 может рассечь резистор 154а, затем резистор 154b, а затем резистор 154с, и так далее, до тех пор пока пусковой элемент не достигнет дистального конца 23b удлиненного канала 22. Резисторы 154а, 154b, 154с, …, 154z могут быть расположены параллельно, как показано на Фиг. 14. В таком варианте, эквивалентное сопротивление резистивного элемента 152 может увеличиться по мере того, как каждый последовательный резистор рассекается режущим элементом 32 в соответствии с соотношением:
1/REq=1/Ra+1/Rb+1/Rc+…+1/Rz
В альтернативном варианте резисторы 154а, 154b, 154с и так далее могут быть расположены последовательно. В таком варианте, эквивалентное сопротивление резистивного элемента 152 может уменьшаться по мере того, как каждый последовательный резистор рассекается режущим элементом 32 в соответствии с соотношением:
REq=Ra+Rb+Rc+…+Rz
Кроме того, напряжение в резистивном элементе 152 может быть определено по закону Ома, который гласит:
V=I×REq,
где V - напряжение, I - сила тока, а REq - эквивалентное сопротивление.
Напряжение может быть измерено в вольтах (V), сила тока - в амперах (А), а сопротивление - в омах (Ω). Если через резистивный элемент 152 проходит постоянный ток, то по мере того как эквивалентное сопротивление изменяется при рассечении резисторов 154, напряжение резистивного элемента изменяется соответственным образом. Таким образом, положение режущего элемента 32 при его перемещении вдоль резистивного элемента 152 может быть определено из выходных сигналов, указывающих напряжение, генерируемое с помощью резистивного элемента 152 по мере разрыва резисторов 154.
В другом варианте осуществления, когда резистивный элемент 152 установлен на корпусе 35 картриджа 34, режущий элемент 32 может разрезать части резистивного элемента 152. Как показано на Фиг.13, резистивный элемент 152 может быть расположен на корпусе 35 картриджа 34 и ориентирован таким образом, что резистивный элемент 152, по меньшей мере, частично перекрывает паз 37, проходящий в корпусе картриджа 35. Подобно описанному выше, паз 37 в корпусе картриджа 35 может быть выполнен с возможностью приема режущего элемента 32, когда пусковой элемент 20 приводится в действие, в результате чего режущий элемент 32 и салазки 33 перемещаются в продольном направлении вдоль канала 22. Например, режущий элемент 32 может перемещаться из первого положения в ближайшем месте вдоль паза 37 во второе положение в промежуточном месте вдоль паза 37, а из второго положения - в третье положение в дальнем положении вдоль паза 37. Когда режущий элемент 32 перемещается в продольном направлении между множеством положений вдоль паза 37, режущий элемент 32 рассекает ткани, зажатые между каналом 22 и упором 20. Режущий элемент 32 также рассекает части резистивной полосы 152, которая покрывает часть паза 37 в картридже со скобками 34, по которому перемещается режущий элемент 32. Подобно вышеописанному, по мере того как режущий элемент разрезает резисторы 154 резистивного элемента 152, эквивалентное сопротивление в резистивном элементе 152 изменяется, что приводит к соответствующему изменению напряжения в резистивном элементе 152.
В различных вариантах осуществления, как показано на Фиг. 3, канала со скобками 22 может содержать контактную площадку, часть, точку или поверхность 158. Контактная площадка 158 может быть расположена на внутренней поверхности 28 канала 22 со скобками. В различных вариантах осуществления, когда резистивный элемент 152 расположен на корпусе 35 картриджа со скобками 34 (Фиг. 14), контактная площадка 158 в канале 22 может быть выполнена с возможностью контакта с частью резистивного элемента 152. Контактная площадка 158 может контактировать с цепью резистивного элемента 152, проводом 168, проходящим от резистивного элемента 152 или контактной площадки, функционально соединенной с резистивным элементом. Кроме того, контактная площадка 158 может обмениваться данными с проводящими элементами 170, 172 и/или с запоминающим устройством 160 посредством проводного или беспроводного соединения, как описано более подробно ниже.
Хирургический инструмент также содержит запоминающее устройство 160, которое функционально обменивается данными с резистивным элементом 152 электронного датчика 150. См. Фиг. 1. Непосредственно или косвенно резистивный элемент 152 передает сигнал в запоминающее устройство 160, которое регистрирует сигналы, как подробно описано ниже. Запоминающее устройство 160 может быть интегрировано в электронный датчик 150. В другом варианте осуществления запоминающее устройство 160 может быть внешним по отношению к электронному датчику и может быть расположено рядом с резистивным элементом 152, например, в удлиненном канале 22 концевого зажима 12. В других вариантах осуществления, как показано на Фиг. 1, запоминающее устройство 160 может быть расположено дальше от резистивного элемента 152, например в рукоятке 6 инструмента 10. В качестве запоминающего устройства 160 можно использовать любое устройство с возможностью хранения или регистрации сигналов датчиков. Например, в качестве запоминающего устройства 160 можно использовать микропроцессор, электрически программируемое ПЗУ (EEPROM) или любое другое соответствующее устройство хранения данных. Запоминающее устройство 160 может записывать сигналы, поступающие от резистивного элемента 152, любым подходящим способом. Например, в одном варианте осуществления запоминающее устройство 160 может записывать сигнал от резистивного элемента 152, когда сигнал изменяется таким образом, что когда режущий элемент 32 рассекает резистор 154 резистивного элемента 152, это приводит к изменению эквивалентного сопротивления и соответствующему изменению напряжения в резистивном элементе 152. В другом варианте осуществления запоминающее устройство 160 может записывать состояние резистивного элемента 152 и сигналы от других датчиков, таких как датчик движения двигателя 110, датчик обратного хода двигателя 130 и/или датчик останова двигателя 142 хирургического инструмента 10, когда сигнал от любого датчика меняет состояние. Таким образом, возможно выполнение моментального снимка состояния инструмента 10. В различных вариантах осуществления запоминающее устройство 160 и/или датчик(и) могут содержать продукты с использованием однопроводной шины 1-WIRE производства компании DALLAS SEMICONDUCTOR, например, 1-WIRE EEPROM.
В различных вариантах осуществления запоминающее устройство 160 имеет внешний доступ, что позволяет использовать внешнее устройство, например компьютер, для доступа к параметрам работы инструмента, хранящимся в запоминающем устройстве 160. Например, запоминающее устройство 160 может иметь порт передачи данных 162. Порт передачи данных 162 обеспечивает передачу сохраненных параметров работы инструмента в соответствии с любым протоколом проводной или беспроводной связи, например, в последовательном или параллельном формате. В дополнение или вместо внешнего порта 162 запоминающее устройство 160 также может включать в себя сменный носитель 164. В качестве сменного носителя 164 можно использовать любое соответствующее устройство хранения данных, которое может быть извлечено из инструмента 10. Например, съемный носитель 164 может содержать любой тип флэш-накопителя, такой как карта памяти Международной ассоциации по картам памяти персональных компьютеров (PCMCIA), карта COMPACTFLASH, карта MULTIMEDIA, карта FLASHMEDIA и др. Съемный носитель 164 может также содержать любой вид устройства хранения на основе диска, включая, например, съемный жесткий диск, компакт-диск (CD), цифровой видеодиск (DVD) и др.
Выходной сигнал от резистивного элемента 152 может быть передан к запоминающему устройству 160, например, с помощью аналого-цифрового преобразователя (не показан). В различных вариантах осуществления, выходные сигналы от резистивного элемента 152 сначала могут быть переданы к интегральной схеме (не показана) для усиления сигнала. Кроме того, выходные сигналы могут быть закодированы и/или модулированы по схеме модуляции.
Выходной сигнал от электронного датчика 150 может быть передан на запоминающее устройство 160 по проводной связи. Как показано на Фиг. 1, изолированные провода или подобные проводники 168 могут передавать электрический сигнал, указывающий на положение пускового элемента в концевом зажиме 12, к запоминающему устройству 160. Провода 168 могут быть выполнены из электропроводного полимера и/или металла (например, меди) и могут быть достаточно гибкими, чтобы проходить через шарнир сочленения 14 и не повреждаться при повороте шарнира.
[0017] В другом варианте осуществления сигнал может быть беспроводным способом передан в запоминающее устройство 160. Различные варианты беспроводной связи описаны в заявке на патент США с серийным номером 13/118259, Джеймс Р. Джиодано и соавт., поданной 27 мая 2011, полное содержание которой включено в настоящее описание в качестве ссылки. Как показано на Фиг. 12, для того чтобы передать сигнал по беспроводной связи, резистивный элемент 152 может содержать проводящий элемент 170, который выступает в качестве передающей антенны. Проводящий элемент 170 может одновременно передавать сигналы от резистивного элемента 152 и получать питание от источника питания, например аккумуляторной батареи, внешней или внутренней по отношению к хирургическому инструменту 10. Проводящий элемент 170 резистивного элемента 152, предпочтительно, изолирован от электропроводного наружного стержня 8 инструмента 10.
В другом варианте осуществления изобретения проводящий элемент 170 может содержать компоненты концевого зажима 12 и стержня 8. В таком варианте резистивный элемент 152 электрически соединен со стержнем 8, а запоминающее устройство изолировано от стержня. Например, внутренняя поверхность 30 удлиненного канала 22 может содержать проводящий материал, который, в свою очередь, может быть электрически соединенным с проводящими элементами стержня 8 (например, закрывающих трубок 40, 42) с помощью непосредственного или опосредованного электрического контакта. Стержень 8 может быть заземлен посредством наружных нижней и верхней боковых частей 59-62, которые могут быть изготовлены из неэлектропроводного материала, например из пластика. Дополнительные компоненты концевого зажима 12 могут содержать непроводящий материал, а запоминающее устройство 160 изолировано от стержня 8. Компоненты концевого зажима 12 и стержня 8, электрически соединенные с проводящим элементом 170 датчика 150, могут служить в качестве части антенны для передачи сигналов, передающих показания от резистивного элемента 152 в запоминающее устройство 160. Кроме того, запоминающее устройство 160 может находиться в электрическом соединении с отдельными компонентами концевого зажима 12 и стержня 8, а резистивный элемент 152 может быть изолирован. Выбранные компоненты концевого зажима 12 и стержня, электрически соединенные с запоминающим устройством 160, могут служить в качестве части антенны для приема сигналов от датчика 150. Резистивный элемент 152 может быть изолирован путем установки его на внутренней поверхности 28 удлиненного канала 22, который выполнен из неэлектропроводного материала, такого как пластик.
Хирургический инструмент 10 может содержать множество проводящих элементов для передачи сигналов от резистивного элемента 152 в запоминающее устройство 160. Например, как показано далее на Фиг. 12, резистивный элемент 152 может передавать сигнал к проводящему элементу 170. Сигнал может быть передан с помощью изолированного провода 168. Такой промежуточный проводящий элемент 170 может быть расположен, например, в концевом зажиме 12, вдоль стержня 8 или на рукоятке 6 инструмента 10. Проводящий элемент 170 может передавать сигнал к дистальному промежуточному проводящему элементу 172а, который может затем ретранслировать сигнал на проксимальный промежуточный проводящий элемент 172b или на запоминающее устройство 160 (как показано на схеме на Фиг. 1). Если используется больше проводящих соединений между резистивным элементом 152 и запоминающим устройством 160, расстояние между проводящими элементами 170, 172 может быть уменьшено, а для передачи сигнала может быть использован более слабый сигнал. Или же, если используется меньше проводящих соединений, может потребоваться более сильный сигнал в связи с большими расстояниями передачи. Поскольку расстояние между проводящими элементами 170, 172 может быть постоянно и известно, уровень мощности сигнала может быть оптимизирован для уменьшения помех для других систем в рабочей среде инструмента 10.
Кроме того, сочетание проводных и беспроводных соединений может быть использовано для передачи сигналов от резистивного элемента 152 в запоминающее устройство 160. Например, как показано на Фиг. 1, концевой зажим 12 может содержать провод 168, который соединяет резистивный элемент 152 с дистальным промежуточным проводящим элементом 172а на стержне 6 инструмента. Сигнал затем может быть передан по беспроводному соединению от дистального промежуточного проводящего элемента 172а на проксимальный промежуточный проводящий элемент 172b. Проксимальный промежуточный проводящий элемент 172b может передавать сигнал в запоминающее устройство 160 по проводу 168 или беспроводным способом.
Резистивный элемент 152 может обмениваться данными с запоминающим устройством 160, используя любую подходящую частоту (например, диапазон частот для промышленной, медицинской и научной аппаратуры). Кроме того, резистивный элемент 152 может передавать сигналы в частотном диапазоне, отличном от диапазона частот принимаемых сигналов от запоминающего устройства 160. Кроме того, несмотря на то, что выше речь шла только об одной антенне в связи с электронным датчиком 150, в других вариантах осуществления электронный датчик 150 может содержать отдельные антенны для приема и передачи сигналов.
Хирургический инструмент 10 также может содержать процессор 180, который функционально взаимодействует с запоминающим устройством 160. Как показано на Фиг. 1, процессор 180 и запоминающее устройство 160 могут содержать интегральный компонент. В другом варианте осуществления, процессор 180 и запоминающее устройство 160 являются дискретными компонентами хирургического инструмента. Процессор 180 определяет положение пускового элемента в концевом зажиме 12, основываясь на выходном сигнале от резистивного элемента 152. В одном варианте осуществления процессор 180 вычисляет положение режущего элемента 32 в концевом зажиме 12, основываясь на сигналах, указывающих на напряжение в резистивном элементе 152. Например, если резисторы 154 резистивной полосы 152 соединены параллельно, эквивалентное сопротивление резистивного элемента 152 увеличивается по мере разрезания каждого последовательного резистора 154. Соответствующие изменения в напряжении в резистивном элементе 152 указывают на узловое расположение режущего элемента 32 вдоль резистивной полосы 152, что еще больше соответствует расположению режущего элемента 32 в удлиненном канале 22.
После определения положения пускового элемента в удлиненном канале 22 данные положения могут быть переданы индикатору, который указывает положение пускового элемента. Индикатор может представлять собой визуальный экрана индикации 190 на рукоятке 6 инструмента, видимой пользователю. Дополнительно или альтернативно, данные положения могут быть сообщены пользователю с помощью тактильной индикации. Например, когда скальпель 32 достигает конца паза 30 в канале 22 со скобками, пользователь может быть предупрежден посредством повышения сопротивления пускового механизма 20. В другом варианте осуществления, как показано на Фиг. 7, пользователь может быть предупрежден с помощью вибрации пистолетной рукоятки 26 инструмента 10, создаваемой вибрационным элементом 192, функционально связанным с процессором 180.
Уникальные и новые аспекты различных вариантов осуществления настоящего изобретения используют электронный датчик для определения положения пускового элемента в концевом зажиме хирургического инструмента и/или состояние картриджа в концевом зажиме. Таким образом, уникальные элементы и принципы различных вариантов осуществления настоящего изобретения могут обеспечить множество различных форм электронного датчика, описанных и заявленных в настоящем документе, которые можно эффективно использовать в сочетании с другими типами и формами хирургических инструментов, концевых зажимов и картриджей со скобками, используемых в сочетании с выстреливающим элементом. Ранее в этом подробном описании описан режуще-сшивающий хирургический инструмент с электроприводом и усилителем в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Тем не менее, специалистам в данной области техники будет понятно, что хирургический инструмент в соответствии с различными вариантами осуществления настоящего раскрытия может быть приведен в действие и управляться альтернативным способом, например, с помощью ручной силы или роботизированного управления. Например, концевой зажим 12, описанный выше, может быть запитан энергией и управляться с помощью робототехнической системы, такой как робототехническая система 1000, описанная более подробно далее.
Робототехнические системы
На Фиг. 15 изображена одна версия главного контроллера 1001, который может использоваться в связи с подчиненной тележкой роботизированного манипулятора 1100 типа, изображенного на Фиг. 16. Главный контроллер 1001 и подчиненный штатив роботизированного манипулятора 1100, а также их соответствующие компоненты и системы управления в совокупности, называются в настоящем документе роботизированной системой 1000. Примеры таких систем и устройств раскрыты в патенте США №7524320, выданном 28 апреля 2009 г., под названием «Интерфейс взаимодействия механического привода с робототехническими хирургическими инструментами», Майкл Дж. Тирни и соавт., содержание которого включено в настоящее описание путем ссылки. Таким образом, различные детали таких устройств не будут описаны здесь подробно помимо тех, которые могут быть необходимы, чтобы понять различные варианты и формы осуществления настоящего изобретения. Как известно, главный контроллер 1001 обычно включает в себя систему управления (в общем представлена как 1003 на Фиг. 15), которую захватывает хирург и манипулирует ею в пространстве, наблюдая за процедурой на стереодисплее 1002. Главные контроллеры 1001 обычно содержат ручные устройства ввода, которые предпочтительно перемещаются с несколькими степенями свободы и которые часто дополнительно имеют рукоятку для приведения в действие инструментов (например, для закрывания браншей зажима, приложения электрического потенциала к электроду и т.п.). Различные робототехнические элементы контроллера и хирургических инструментов раскрыты в заявке на патент США с серийным номером 13/118241, озаглавленной «Хирургические сшивающие инструменты с поворотным элементом развертывания скобок», полное раскрытие которого включено в настоящее описание путем ссылки.
Как можно видеть на Фиг. 16, в одной форме штатив манипулятора 1100 выполнен с возможностью приведения в действие множества хирургических инструментов, в общем обозначенных как 1200. Различные робототехнические хирургические системы и методы, использующие главный контроллер и штатив манипулятора, раскрыты в патенте США №6132368, озаглавленном «Многокомпонентная система и способ дистанционного восприятия из рабочей зоны», полное раскрытие которого включено в настоящее описание путем ссылки. В различных формах штатив манипулятора 1100 включает в себя основание 1102, на котором, в показанном варианте, установлены три хирургических инструмента 1200. В различных формах каждый из хирургических инструментов 1200 поддерживаются рядом связей, шарнирно поворачиваемых вручную (как правило, эти связи называют настраиваемыми соединениями 1104) и роботизированным манипулятором 1106. Эти структуры в настоящем документе показаны с защитными чехлами, продолжающимися на большую часть робототехнической связи. Эти защитные чехлы могут носить факультативный характер, а также могут быть ограничены в размерах или полностью устранены в некоторых вариантах для минимизации инерции, с которой сталкиваются элементы сервоприводов, используемые для манипулирования такими устройствами, для ограничения объема движущихся компонентов, чтобы избежать столкновения, и для ограничения общего веса штатива 1100. Штатив 1100, как правило, имеет размеры, подходящие для его транспортировки между операционных. Штатив 1100 может быть выполнен с возможностью прохода через стандартные двери операционной и помещения в стандартные лифты больниц. В различных формах, штатив 1100 будет предпочтительно иметь соответствующий вес и включать в себя колесную систему (или другое средство транспортировки), которая позволяет одному человеку располагать штатив 1100 рядом с операционным столом.
Как показано на Фиг. 17, по меньшей мере, в одной форме манипуляторы 1106 могут содержать соединение 1108, которое ограничивает движение хирургического инструмента 1200. В различных вариантах осуществления соединения 1108 содержат жесткие связи, соединенные вместе с помощью вращательных соединений в параллелограммном устройстве так, что хирургический инструмент 1200 вращается вокруг точки в пространстве 1110, как более полно описано в выданном патенте США сер. №5817084, полное описание которого включено в настоящий документ в качестве ссылки. Параллелограммное устройство сдерживает шарнирный поворот вокруг оси 1112а, иногда называемой осью подвижности по наклону. Связи, поддерживающие параллелограммную связь, шарнирно прикреплены к настраиваемым соединениям 1104 (Фиг. 15) так, чтобы хирургический инструмент 1200 далее вращался вокруг оси 1112b, которую иногда называют ось поворота. Оси подвижности по наклону и поворота 1112A, 1112b пересекаются в удаленном центре 1114, ориентированном вдоль стержня 1208 хирургического инструмента 1200. Хирургический инструмент 1200 может иметь дополнительные степени свободы, поддерживаемые манипулятором 1106, в том числе скользящее движение хирургического инструмента 1200 вдоль продольной оси инструмента «LT-LT». Когда хирургический инструмент 1200 скользит вдоль оси инструмента LT-LT относительно манипулятора 1106 (стрелка 1112c), удаленный центр 1114 остается неподвижным относительно основания 1116 манипулятора 1106. Таким образом, весь манипулятор в основном перемещается для изменения положения удаленного центра 1114. Связь 1108 манипулятора 1106 приводится в действие серией электродвигателей 1120. Эти двигатели активно двигают связь 1108 в ответ на команды, поступающие от процессора системы управления. Как будет обсуждаться более подробно ниже, электродвигатели 1120 также используются для манипулирования хирургическим инструментом 1200.
Альтернативная структура настраиваемых соединений показана на Фиг. 18. В этом варианте осуществления хирургический инструмент 1200 поддерживается альтернативной конструкцией манипулятора 1106' между двумя инструментами манипуляции тканями. Специалистам в данной области техники будет понятно, что различные варианты осуществления настоящего изобретения могут включать в себя широкий спектр альтернативных робототехнических конструкций, в том числе те, которые описаны в патенте США сер. №5878193, озаглавленном «Автоматизированная эндоскопическая система для оптимального расположения», полное раскрытие которого включено в настоящий документ в качестве ссылки. Кроме того, в то время как передача данных между робототехническим компонентом и процессором роботизированной хирургической системы прежде всего описаны здесь со ссылкой на обмен данными между хирургическим инструментом 1200 и главным контроллером 1001, следует понимать, что аналогичный обмен данными может происходить между электрической схемой манипулятора, настраиваемым соединением, эндоскопом или другим устройством захвата изображения или подобным им устройством, а процессор роботизированной хирургической системы для проверки совместимости компонентов, компонентной идентификации компонентов, компонентной калибровки (например, смещение или тому подобное) соединения, подтверждение связи компонента с роботизированной хирургической системой или тому подобное.
Примерный неограничивающий хирургический инструмент 1200, который хорошо приспособлен для использования с роботизированной системой 1000, имеющей узел привода инструмента 1010 (Фиг. 20), функционально соединенный с главным контроллером 1001, эксплуатация которого выполняется с помощью команд ввода от оператора (т.е., хирурга), изображен на Фиг. 19. Как видно на этом чертеже, хирургический инструмент 1200 включает в себя хирургический концевой зажим 2012, который содержит эндокатер. По меньшей мере в одной форме, хирургический инструмент 1200 обычно включает в себя удлиненный стержень в сборе 2008, который имеет проксимальную закрывающую трубку 2040 и дистальную закрывающую трубку 2042, которые соединены друг с другом шарнирным соединением 2011. Хирургический инструмент 1200 функционально связан с манипулятором с помощью установочной части инструмента, как правило как 1300. Хирургический инструмент 1200 дополнительно включает в себя интерфейс 1230, который механически и электрически связывает установочную часть инструмента 1300 и манипулятор. Одна из форм интерфейса 1230 показана на Фиг. 20-24. В различных вариантах осуществления установочная часть устройства 1300 содержит установочную пластину инструмента 1302, которая функционально поддерживает множество (четыре показаны на Фиг. 24) вращающиеся части корпуса, ведомый диск или элементы 1304, каждый из которых содержит пару штифтов 1306, которые проходят от поверхности ведомого элемента 1304. Один штифт 1306 расположен ближе к оси вращения каждого ведомого элемента 1304, чем другой штифт 1306 того же ведомого элемента 1304, что позволяет обеспечить положительное угловое выравнивание ведомого элемента 1304. Интерфейс 1230 включает в себя адаптерную часть 1240, которая выполнена с возможностью монтироваться с установочной пластиной 1302 как будет далее обсуждаться ниже. Адаптерная часть 1240 может содержать множество электрических соединительных штифтов 1242 (Фиг. 22), которые могут быть соединены с конструкцией запоминающего устройства на печатной плате внутри установочной части инструмента 1300. В то время как интерфейс 1230 описан здесь со ссылкой на механические, электрические, магнитные и соединительные элементы, следует понимать, что большое разнообразие форм телеметрии могут быть использованы, в том числе формы инфракрасной, индуктивной связи или тому подобное.
Как можно видеть на Фиг. 20-23, адаптерная часть 1240 обычно содержит сторону инструмента 1244 и сторону держателя 1246. В различных формах, множество вращающихся тел 1250 могут быть установлены на плавающей пластине 1248, которая имеет ограниченный диапазон движения по отношению к окружающей конструкции адаптера, нормальной к основным поверхностям адаптера 1240. Осевое движение плавающей пластины 1248 помогает отделить вращающиеся тела 1250 от установочной части инструмента 1300, когда рычаги 1303 по бокам корпуса установочной части инструмента 1301 приводятся в действие (см. Фиг. 19). Другие элементы/приспособления могут быть использованы для разъемного присоединения части инструмента 1300 к адаптеру 1240. По меньшей мере в одной форме, вращающиеся тела 1250 упруго установлены на плавающей пластине 1248 с помощью упругих радиальных элементов, которые проходят зубчатым узором по окружности вращающихся тел 1250. Вращающиеся тела 1250 могут перемещаться в осевом направлении по отношению к пластине 1248, отклоняя эти упругие структуры. При расположении в первом осевом положении (по направлению к стороне инструмента 1244) вращающиеся тела 1250 могут свободно вращаться без ограничения угла поворота. Однако, когда вращающиеся тела 1250 перемещаются в осевом направлении в сторону инструмента 1244, вкладки 1252 (продолжающиеся в радиальном направлении от вращающихся тел 1250) поперечно захватывают фиксаторы на плавающих пластинах таким образом, чтобы ограничить угловое вращение вращающихся тел 1250 вокруг своих осей. Это ограниченное вращение может быть использовано для того, чтобы помочь вовлечь вращающиеся тела в зацепление со штифтами 1272 части держателя соответствующего инструмента роботизированной системы 1000, в то время, когда штифты 1272 будут толкать вращающиеся тела 1250 в положение ограничения поворота до тех пор, пока штифты 1234 не будут выровнены (и не соскользнут в) с отверстиями 1256'. Отверстия 1256 на стороне инструмента 1244 и отверстия 1256' на стороне держателя 1246 вращающихся тел 1250 выполнены с возможностью точного выравнивания приводных элементов 1304 (Фиг. 24) установочной части инструмента 1300 относительно приводных элементов 1271 держателя инструмента 1270. Как описано выше в отношении внутренних и внешних штифтов 1306 приводных элементов 1304, отверстия 1256, 1256' находятся на отличающихся расстояниях от оси вращения их соответствующих вращающихся тел 1250 таким образом, чтобы гарантировать, что выравнивание не составляет 180 градусов от их заданного положения. Кроме того, каждое из отверстий 1256 слегка радиально вытянуто таким образом, чтобы принимать подходяще штифты 1306 в окружной ориентации. Это позволяет штифтам 1306 скользить в радиальном направлении в пределах отверстия 1256, 1256' и размещать некоторые аксиальные смещения между инструментом 1200 и держателем инструмента 1270, сокращая до минимума любое угловое смещение и зазор между ведущим и ведомым элементами. Отверстия 1256 на стороне инструмента 1244 смещены приблизительно на 90 градусов от отверстий 1256' (показано пунктирными линиями) на держателе 1246, как видно наиболее четко на Фиг. 23.
Различные варианты осуществления изобретения могут дополнительно включать в себя множество штифтов электрических контактов 1242, расположенных на стороне держателя 1246 адаптера 1240, а на стороне инструмента 1244 адаптера 1240 могут содержаться пазы 1258 (Фиг. 23) для приема набора штырей (не показаны) от установочной части инструмента 1300. В дополнение к передаче электрических сигналов между хирургическим инструментом 1200 и державкой 1270, по меньшей мере некоторые из этих электрических соединений могут быть соединены с запоминающим устройством адаптера 1260 (Фиг. 22) с помощью печатной платы адаптера 1240.
Съемный фиксатор 1239 может быть использован для разъемного прикрепления адаптера 1240 к державке 1270. Термин «приводной узел инструмента» в настоящем описании при использовании в контексте роботизированной системы 1000, по меньшей мере, охватывает различные варианты осуществления адаптера 1240 и державки 1270 и обозначен на Фиг. 20, как правило, 1010. Например, как можно видеть на Фиг. 20, держатель инструмента 1270 может включать в себя первый элемент защелки 1274, который имеет такие размеры, которые могут быть приняты в соответствующие пазы опоры 1241, предусмотренные в адаптере 1240. Кроме того, держатель инструмента 1270 может дополнительно иметь второй элемент защелки 1276, который имеет такие размеры, которые могут быть приняты в соответствующие пазы опор 1243, предусмотренные в адаптере 1240. По меньшей мере в одной форме, узел защелки 1245 подвижно установлен на адаптере 1240 наклонно между первым защелкнутым положением, причем штифты защелки 1276 остаются в их соответствующих пазах опор 1243, и разблокированным положением, причем штифты защелок 1276 второго элемента защелки могут быть в или удалены из фиксирующих пазов опор 1243. Пружина или пружины (не показаны) используются для смещения защелки в защелкнутое положение. Бортик на стороне инструмента 1244 адаптера 1240 может скольжением принимать боковые выступы корпуса установки инструмента 1301.
Обратимся далее к Фиг. 24-31. Как показано на чертежах, по меньшей мере, в одном варианте осуществления хирургический инструмент 1200 включает в себя хирургический концевой зажим 2012, который содержит в этом примере, помимо всего прочего, по меньшей мере, один компонент 2024, который селективно перемещается между первым и вторым положениями относительно, по меньшей мере, одного другого компонента 2022 в ответ на различные движения управления, применяемые к нему, как будет обсуждаться более подробно ниже. В различных вариантах осуществления компонент 2022 содержит удлиненный канал 2022, выполненный с возможностью функционально удерживать картридж со скобками 2034, а компонент 2024 содержит шарнирно передвигающийся зажимной элемент, такой как упор 2024. Различные варианты осуществления хирургического концевого зажима 2012 выполнены с возможностью поддержания упора 2024 и удлиненного канала 2022 на расстоянии, что обеспечивает эффективное сшивание и рассечение ткани, зажатой в хирургическом концевом зажиме 2012. Как можно видеть на Фиг. 30, хирургический концевой зажим 2012 дополнительно содержит режущий инструмент 2032 и салазки 2033. Режущий инструмент 2032 может, например, представлять собой скальпель. Картридж со скобками 2034 функционально вмещает множество хирургических скобок (не показаны), которые установлены на подвижном выталкивателе скобок (не показан). Когда режущий инструмент 2032 совершает возвратно-поступательное движение наружу через центрально расположенное отверстие (не показано) в хирургическом картридже 2034, он оттягивает наружу и салазки 2033. Когда салазки 2033 совершают возвратно-поступательное движение наружу, их «клиновидная» конфигурация контактирует с подвижными направляющими скобок и перемещает их вертикально к закрытому упору 2024. Хирургические скобки формируются, когда они задвигаются в формующую поверхность, расположенную на нижней поверхности упора 2024. Салазки 2033 могут быть частью хирургического картриджа 2034, так что, когда режущий инструмент 2032 втягивается после операции разрезания, салазки 2033 не втягиваются. Упор 2024 может быть шарнирно открыт и закрыт в шарнирной точке 2025, расположенной на проксимальном конце удлиненного канала 2022. Упор 2024 может также иметь петлю 2027 на проксимальном конце, которая взаимодействует с компонентом элемента системы закрытия (описан ниже) для открывания упора 2024. Удлиненный канал 2022 и упор 2024 может изготавливаться из электропроводного материала (такого как металл), благодаря чему они могут служить частью антенны, которая взаимодействует с датчиком(ами) в концевом зажиме, что подробно описывается ниже. Картридж со скобками 2034 может быть выполнен из непроводящего материала (такого как пластик), а датчик(и) может быть соединен с или расположен в хирургическим картриджем со скобками 2034, как было описано выше.
Как можно видеть на Фиг. 24-31, хирургический концевой зажим 2012 прикреплен к установочной части инструмента 1300 с помощью узла удлиненного стержня 2008 в соответствии с различными вариантами осуществления. Как показано в иллюстрируемом варианте осуществления узел стержня 2008 содержит шарнирное сочленение, в целом обозначаемое как 2011, которое позволяет хирургическому концевому зажиму 2012 выборочно шарнирно поворачиваться вокруг оси сочленения АА-АА, которая, по существу, является поперечной по отношению к продольной оси инструмента LT-LT. См. Фиг. 25. В других вариантах осуществления шарнирное сочленение опущено. В различных вариантах осуществления узел стержня 2008 может содержать узел закрывающей трубки 2009, который содержит проксимальную закрывающую трубку 2040 и дистальную закрывающую трубку 2042, которые шарнирно соединены шарнирными звеньями 2044 и функционально установлены на узле цапфы, как правило, изображенной как 2049. В показанном варианте осуществления, узел цапфы 2049 содержит дистальную часть цапфы 2050, которая присоединена к удлиненному каналу 2022 и шарнирно соединена с проксимальным участком цапфы 2052. Узел закрывающей трубки 2009 выполнен с возможностью скользить вдоль оси по узлу цапфы 2049 в ответ на движения, приложенные к нему. Дистальная закрывающая трубка 2042 имеет отверстие 2045, в которое вставляется петля 2027 упора 2024 для того, чтобы облегчить открытие упора 2024, когда дистальная закрывающая трубка 2042 перемещается вдоль оси в проксимальном направлении «PD». Компоненты основного приводного стержня в сборе (например, приводные стержни 2048, 2050) могут быть изготовлены из непроводящего материала (такого как пластик).
При использовании, может понадобиться повернуть хирургический концевой зажим 2012 относительно продольной оси инструмента LT-LT. По меньшей мере в одном варианте осуществления установочная часть инструмента 1300 включает в себя узел вращательной передачи 2069, выполненный с возможностью приема соответствующего вращательное выходного движения от узла приводного инструмента 1010 роботизированной системы 1000 и преобразования вращательного выходного движения, чтобы вращательно управлять узлом удлиненного стержня 2008 (и хирургическим концевым зажимом 2012) вокруг продольной оси инструмента LT-LT. В различных вариантах осуществления, например, проксимальный конец 2060 проксимальной закрывающей трубки 2040 установлен с возможностью вращения на установочной пластине инструмента 1302 установочной части инструмента 1300 с помощью передней опорной подставки 1309 и закрывающих салазок 2100, которые также установлены с возможностью передвижения на установочной пластине инструмента 1302. По меньшей мере в одной форме узел вращательной передачи 2069 содержит трубчатый зубчатый сектор 2062, который образуется на (или прикрепленный к) проксимальном конце 2060 проксимальной закрывающей трубки 2040 для функционального зацепления с помощью узла поворотного элемента 2070, который функционально установлен на установочной пластине инструмента 1302.
Как можно видеть на Фиг. 27, узел редуктора вращения 2070, по меньшей мере, в одном варианте осуществления содержит поворотное зубчатое колесо 2072, соединенное с соответствующим первым ведомым диском или элементом 1304, расположенным на адаптерной стороне 1307 установочной пластины инструмента 1302, когда установочная часть инструмента 1300 соединяется с узлом привода инструмента 1010. См. Фиг. 24. Узел редуктора вращения 2070 дополнительно содержит поворотную шестерню 2074, которая установлена с возможностью поворота на установочной пластине инструмента 1302 в зацепление с трубчатым зубчатым сегментом 2062 и редуктором вращения 2072.
Применение первого вращательного выходного движения от узла приводного инструмента 1010 роботизированной системы 1000 к соответствующему ведомому элементу 1304 будет, таким образом, вызывать вращение редуктора вращения 2072. Вращение редуктора вращения 2072 в конечном счете приводит к вращению узла удлиненного стержня 2008 (и хирургического концевого зажима 2012) относительно продольной оси инструмента LT-LT (показано стрелкой «Р» на Фиг. 27). Следует иметь ввиду, что сообщение выходного вращательного движения от узла приводного инструмента 1010 в одном направлении приводит к вращению узла удлиненного стержня 2008 и хирургического концевого зажима 2012 вокруг продольной оси инструмента LT-LT в первом направлении, а сообщение выходного вращательного движения в противоположном направлении приводит к вращению узла удлиненного стержня 2008 и хирургического концевого зажима 2012 во втором направлении, противоположном первому направлению.
[0018] По меньшей мере в одном варианте осуществления закрытие упора 2024 по отношению к картриджу со скобками 2034 осуществляется путем перемещения узла закрывающей трубки 2009 вдоль оси узла цапфы 2049 в дистальном направлении «DD». Как указано выше, в различных вариантах осуществления, проксимальный конец 2060 проксимальной закрывающей трубки 2040 установлен на закрывающих салазках 2100, содержащих часть закрывающей передачи, как правило, изображается как 2099. По меньшей мере в одной форме, закрывающие салазки 2100 выполнены с возможностью поддержки закрывающей трубки 2009 на установочной пластине инструмента 1320 таким образом, что закрывающая проксимальная трубка 2040 может вращаться по отношению к закрывающим салазкам 2100 и при этом перемещаться в осевом направлении с закрывающимися салазками 2100. В частности, как видно на Фиг. 32, закрывающие салазки 2100 имеют вертикальную петлю 2101, которая проходит в радиальном пазу 2063 в проксимальной концевой части проксимальной закрывающей трубки 2040. Кроме того, как можно видеть на Фиг. 29 и 32, закрывающие салазки 2100 имеют петлевидную часть 2102, которая проходит через паз 1305 в установочной пластине инструмента 1302. Петлевидная часть 2102 выполнена с возможностью поддерживать скользящий контакт закрывающих салазок 2100 с установочной пластиной инструмента 1302. В различных вариантах осуществления закрывающие салазки 2100 имеют вертикальную часть 2104, которая имеет закрывающую реечную передачу 2106, сформированную на ней. Закрывающая зубчатая передача 2106 выполнена с возможностью зацепления с узлом закрывающего редуктора 2110. См. Фиг. 29.
В различных формах закрывающий редуктор 2110 содержит закрывающее цилиндрическое зубчатое колесо 2112, которое соединено с соответствующим одним из вторых ведомых дисков или элементов 1304 на стороне адаптера 1307 установочной пластины инструмента 1302. См. Фиг. 24. Таким образом, сообщение второго выходного вращательного движения от узла приводного инструмента 1010 роботизированной системы 1000 соответствующему второму ведомому элементу 1304 вызывает вращение закрывающего цилиндрического зубчатого колеса 2112, когда установочная часть инструмента 1300 соединена с узлом приводного инструмента 1010. Узел закрывающего редуктора 2110 дополнительно включает в себя редукционный комплект зубчатых колес 2114, который поддерживается в зацеплении с закрывающим цилиндрическим зубчатым колесом 2112. Как можно видеть на Фиг. 28 и 29, редукционный комплект закрывающих зубчатых колес 2114 содержит ведомую шестерню 2116, которая поддерживается с возможностью вращения в зацеплении с закрывающим цилиндрическим зубчатым колесом 2112.
Редукционный комплект закрывающих зубчатых колес 2114 дополнительно содержит первую закрывающую шестерню 2118, которая находится в зацеплении со второй закрывающей шестерней 2120, которая установлена с возможностью вращения на установочной пластине инструмента 1302 в зацеплении с закрывающей реечной передачей 2106. Таким образом, сообщение второго выходного вращательного движения от узла приводного инструмента 1010 роботизированной системы 1000 соответствующему второму ведомому элементу 1304 вызывает вращение закрывающего цилиндрического зубчатого колеса 2112 и закрывающей передачи 2110 и в конечном счете перемещает закрывающие салазки 2100 и узел закрывающей трубки 2009 в осевом направлении.
Осевое направление, в котором перемещается узел закрывающей трубки 2009, в конечном счете, зависит от направления, в котором вращается второй ведомый элемент 1304. Например, в ответ на одно выходное вращательное движение, сообщаемое от узла приводного инструмента 1010 роботизированной системы 1000, закрывающие салазки 2100 будут перемещаться в дистальном направлении «DD» и в конечном счете переместят узел закрывающей трубки 1009 в дистальном направлении. По мере того как закрывающая дистальная трубка 2042 совершает возвратно-поступающее движение наружу, конец закрывающего трубчатого сегмента 2042 будет входить в зацепление с частью упора 2024, в результате чего упор 2024 шарнирно поворачивается в закрытое положение. При сообщении выходного движения «на открытие» от узла приводного инструмента 1010 роботизированной системы 1000 закрывающие салазки 2100 и узел стержня 2008 будут перемещаться в проксимальном направлении «PD».
В различных вариантах осуществления пружина (не показана) может быть использована для смещения упора в открытое положение, когда закрывающая дистальная трубка 2042 переместилась в исходное положение. В различных вариантах осуществления различные шестерни закрывающей зубчатой передачи 2110 имеют такие размеры, чтобы генерировать усилия закрытия, необходимые для удовлетворительного закрытия упора 2024 на ткани, которую необходимо рассечь и сшить с помощью хирургического концевого зажима 2012. Например, шестерни закрывающей передачи 2110 могут иметь такие размеры, чтобы генерировать усилие, приблизительно равное 32-54 кг (70-120 фунтов).
В различных вариантах осуществления режущий инструмент, 2032 приводится в движение с помощью хирургического концевого зажима 2012 с помощью стержня скальпеля 2200. См. Фиг. 30 и 32. По меньшей мере в одной форме стержень скальпеля 2200 может быть изготовлен из, например, нержавеющей стали или другого подобного материала и иметь по существу прямоугольную форму поперечного сечения. Такая конфигурация стержня скальпеля достаточно жесткая для того, чтобы протолкнуть режущий инструмент 2032 через ткани, зажатые в хирургическом концевом зажиме 2012, но и достаточно гибкая для того, чтобы хирургический концевой зажим 2012 мог шарнирно поворачиваться относительно проксимальной закрывающей трубки 2040 и проксимальной части цапфы 2052 вокруг оси сочленения АА-АА, как будет обсуждаться более подробно ниже. Как можно видеть на Фиг. 33 и 34, проксимальная часть цапфы 2052 имеет проход прямоугольной формы 2054, проходящий через нее, чтобы обеспечить поддержку стержня скальпеля 2200, когда он проталкивается через отверстие в осевом направлении. Проксимальная часть цапфы 2052 имеет проксимальный конец 2056, который установлен с возможностью вращения на монтажном кронштейне цапфы 2057, прикрепленном к установочной пластине инструмента 1032. См. Фиг. 32. Такое расположение позволяет проксимальной части цапфы 2052 вращаться, но не перемещаться в осевом направлении внутри проксимальной закрывающей трубки 2040.
Как показано на Фиг. 30, дистальный конец 2202 стержня скальпеля 2200 прикреплен к режущему инструменту 2032. Проксимальный конец 2204 стержня скальпеля 2200 прикреплен с возможностью вращения к реечной передаче скальпеля 2206 таким образом, что стержень скальпеля 2200 может свободно вращаться относительно реечной передачи скальпеля 2206. См. Фиг. 32. Как можно видеть на Фиг. 26-31, реечная передача скальпеля 2206 установлена с возможностью скольжения в корпусе рейки 2210, который присоединен к установочной пластине инструмента 1302 таким образом, что реечная передача скальпеля 2206 удерживается в зацеплении с узлом редуктора скальпеля 2220. Более конкретно и со ссылкой на Фиг. 29, по меньшей мере, в одном варианте редуктор скальпеля 2220 содержит цилиндрическое зубчатое колесо скальпеля 2222, которое соединено с соответствующим третьим из ведомых дисков или элементов 1304 на стороне адаптера 1307 установочной пластины инструмента 1302. См. Фиг. 24. Таким образом, сообщение другого вращательного выходного движения от узла приводного инструмента 1000 через узел приводного инструмента 1010 к соответствующему ведомому элементу 1304 будет, таким образом, вызывать вращение цилиндрического редуктора ножа 2222. Узел редуктора скальпеля 2220 дополнительно содержит комплект редукционных шестерней скальпеля 2224, который содержит первую ведомую шестерню скальпеля 2226 и вторую ведущую шестерню скальпеля 2228.
Комплект редукционных шестерней скальпеля 2224 установлен с возможностью вращения на установочную пластину инструмента 1302 таким образом, что первая ведомая шестерня скальпеля 2226 находится в зацеплении с цилиндрическим зубчатым колесом скальпеля 2222. Аналогичным образом, вторая ведущая шестерня скальпеля 2228 находится в зацеплении с третьей ведущей шестерней скальпеля 2230, которая установлена с возможностью вращения на установочной пластине инструмента 1302 в зацеплении с реечной передачей скальпеля 2206. В различных вариантах осуществления шестерни узла редуктора 2220 имеют такие размеры, чтобы генерировать усилия, необходимые для приведения в действие режущего элемента 2032 сквозь ткань, зажатую в хирургическом концевом зажиме 2012 и установки в нее скобок. Например, шестерни приводного узла скальпеля 2230 могут быть рассчитаны для генерации усилия, приблизительно равного от 18 до 45 кг (от 40 до 100 фунтов). Следует иметь ввиду, что сообщение вращательного выходного движения от узла приводного инструмента 1010 в одном направлении приведет к осевому перемещению режущего инструмента 2032 в дистальном направлении, а сообщение вращательного выходного движения в противоположном направлении приведет к осевому перемещению режущего инструмента 2032 в проксимальном направлении.
На Фиг. 35 показан другой концевой зажим 2012, который включает в себя электронный датчик 2150. Электронный датчик 2150, аналогично датчику 150, описанному выше, определяет положение пускового элемента в концевом зажиме 2012 и/или состояние или наличие картриджа 2034 в концевом зажиме 2012. Режущий элемент 2032, салазки 2033, стержень скальпеля 2200 и другие элементы, выполненные с возможностью перемещаться в концевом зажиме 2012, все вместе обозначаются здесь как пусковые элементы. По меньшей мере в одной форме электронный датчик 2150 содержит резистивный элемент 2152, который установлен в пределах концевого зажима 2012 хирургического инструмента 1200. Резистивный элемент 2152 может быть установлен на канале со скобками 2022, зажимном элементе 2024, картридже со скобками 2034 или другом элементе в концевом зажиме 2012. Когда пусковой элемент перемещается в продольном направлении через концевой зажим 2012, пусковой элемент может подвижно контактировать с резистивным элементом 2152.
Как указано выше, в различных вариантах осуществления резистивный элемент 2152 электронного датчика 2150 поддерживается удлиненным каналом 2022. Например, по меньшей мере, в одном варианте осуществления резистивный элемент 2152 прикреплен к удлиненному каналу 2022 с помощью клеящего вещества. В других вариантах осуществления резистивный элемент 2152 может быть прикреплен к компоненту в удлиненном канале 2022. Как показано в варианте осуществления на Фиг. 35, резистивный элемент 2152 может быть расположен на внутренней поверхности 2028 канала со скобками 2022 таким образом, что пусковой элемент контактирует с резистивным элементом 2152, во время продольного перемещения пускового элемента в канале со скобками 2022. В альтернативных вариантах осуществления резистивный элемент 2152 поддерживается картриджем со скобками 2034. Как показано на Фиг. 36, резистивный элемент 2152 может быть установлен на корпусе 2035 картриджа со скобками 2034. Подобно описанному выше резистивный элемент 2152 может быть расположен в корпусе 2035 картриджа 2034 таким образом, что часть пускового элемента контактирует по меньше мере с частью резистивного элемента 2152, когда пусковой элемент перемещается в продольном направлении в канале для скобок 2022.
Как указывалось выше в отношении резистивного элемента 152, резистивный элемент 2152 электронного датчика 2150 может содержать множество резисторов 2154 и множество узлов 2156. Резисторы 2154 могут быть расположены в параллельной или последовательной конфигурации. Как показано на Фиг. 35, пусковой элемент концевого зажима 2012 находится в подвижном контакте с резистивным элементом 2152, когда пусковой элемент перемещается между проксимальным концом 2023а канала со скобками 2022 и дистальным концом 2023b канала со скобками 2022. Когда пусковой элемент проходит через канал 2022 со скобками и подвижно контактирует с резистивным элементом 2152, резистивный элемент 2152 генерирует выходные сигналы, указывающие на положение пускового элемента в удлиненном канале 2022. Выходные сигналы, генерируемые резистивным элементом 2152, могут представлять собой измерения напряжения (или мощности) вдоль резистивного элемента 2152.
В различных вариантах осуществления, как показано на Фиг. 35, пусковой элемент может по касательной контактировать с резистивным элементом 2152 таким образом, что пусковой элемент рассекает части резистивного элемента 2152, как более подробно описано выше в отношении резистивного элемента 152. Таким образом, положение режущего элемента 32 при его перемещении вдоль резистивного элемента 2152 может быть определено из выходных сигналов, указывающих напряжение, генерируемое с помощью резистивного элемента 2152 по мере разрыва резисторов 2154.
[0019] Робототехническая система 1000 также может содержать процессор 2180, который функционально связывается с главным контроллером 1001. В различных вариантах осуществления процессор 2180 может быть интегрирован в главный контроллер 1001. Как более подробно описано выше со ссылкой на процессор 180, процессор 2180 может определять положение пускового элемента в концевом зажиме 12, исходя из выходных сигналов датчика 2150. Непосредственно или опосредованно датчик 2150 может подавать сигнал процессору 2180, как более подробно описано выше. В различных вариантах осуществления процессор 2180 может содержать запоминающее устройство 2160. Как описано более подробно выше в отношении запоминающего устройства 160, запоминающее устройство 2160 может представлять собой любой тип устройства, способный хранить или записывать сигналы датчиков, и может обмениваться данными с резистивным элементом 2152 датчика 2150 с помощью проводной или беспроводной связи или их комбинации по проводам 168 проводящих элементов 170 и контактных площадок 158 (Фиг. 3). В других вариантах осуществления запоминающее устройство 2160 может не быть интегрировано в процессор 2180; запоминающее устройство может быть дискретным компонентом робототехнической системы 1000, которая функционально взаимодействует с резистивным элементом 2152 датчика 2150 и затем передает выходные сигналы от датчика 2150 к процессору 2180.
Если процессор 2180 не интегрирован в главный контроллер 1001, процессор 2180 может сообщать о положении пускового элемента управляющему контроллеру 1001. После определения положения пускового элемента в удлиненном канале 2022 данные положения могут быть переданы к индикатору, который указывает положение пускового элемента 2190. Индикатор может представлять собой визуальный экран, такой как датчик обратной связи 1005, или тактильный индикатор.
[0020] Устройства, описанные в настоящей заявке, могут быть выполнены с возможностью утилизации после одноразового использования или могут быть выполнены с возможностью многократного использования. Однако в каждом случае после по меньшей мере одного использования устройство можно использовать повторно после восстановления. Восстановление может включать в себя любую комбинацию стадий разборки устройства, последующей чистки или замены отдельных элементов и последующей повторной сборки. В частности, можно разобрать устройство и избирательно заменить или удалить в любой комбинации любое количество отдельных элементов или частей устройства. После чистки и/или замены отдельных частей устройство можно снова собрать в центрах по ремонту или в операционном блоке непосредственно перед хирургической операцией для последующего использования. Специалистам в данной области будет очевидно, что при восстановлении устройства можно использовать различные способы разборки, чистки/замены и повторной сборки. Использование таких способов, а также полученное в результате восстановленное устройство входят в сферу действия настоящей заявки.
Как упоминалось выше, уникальные и новые аспекты различных вариантов осуществления настоящего изобретения используют электронный датчик для определения положения пускового элемента в концевом зажиме хирургического инструмента и/или состояние картриджа в концевом зажиме. Таким образом, уникальные элементы и принципы различных вариантов осуществления настоящего изобретения могут обеспечить множество различных форм электронного датчика, описанных и заявленных в настоящем документе, которые можно эффективно использовать в сочетании с другими типами и формами хирургических инструментов, концевых зажимов и картриджей со скобками, используемых в сочетании с выстреливающим элементом. Ранее в этом подробном описании описана робототехническая система для режуще-сшивающего хирургического инструмента в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Тем не менее, специалистам в данной области техники будет понятно, что хирургический инструмент в соответствии с различными вариантами осуществления настоящего раскрытия может быть приведен в действие и управляться альтернативным способом, например, с использование ручной силы или роботизированного управления. Предыдущее описание и последующая формула изобретения предназначены для охвата всех модификаций и вариантов, которые составляют объем настоящего раскрытия. Размеры, представленные на некоторых чертежах, приведены в качестве примеров и не должны толковаться как ограничивающие. Материалы, указанные в описании для определенных компонентов, могут быть заменены другими материалами.
Любой патент, публикация или другое описание, которое полностью или частично включено в настоящий документ путем ссылки, является составной частью настоящего документа в той степени, в которой она не противоречит определениям, положениям или другому описанию, представленному в настоящем документе. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям настоящего документа, которая была включена в указанный документ путем ссылки. Любой материал или его часть, которая включена в настоящий документ путем ссылки и которая противоречит указанным определениям, положениям или другому описанию, представленному в настоящем документе, включается в настоящий документ в той мере, в которой между включенным путем ссылки материалом и настоящим документом с описанием не возникает противоречий.
Реферат
Изобретение относится к медицине. Хирургический инструмент с концевым зажимом содержит элементы датчиков для определения положения пускового элемента в концевом зажиме. По мере перемещения пускового элемента внутри концевого зажима, он по касательной контактирует с резистивным элементом для генерации сигналов. Сигналы указывают положение пускового элемента. Датчик может определять состояние или наличие картриджа в концевом зажиме. Элемент датчика может обмениваться данными с запоминающим устройством, процессором и индикатором. 3 н. и 16 з.п. ф-лы, 36 ил.
Комментарии