Устройство и способ для роботизированной хирургии, а также позиционирующий вспомогательный блок - RU2719931C2
Код документа: RU2719931C2
Чертежи
















Описание
Изобретение касается устройства и способа для роботизированной хирургии, а также позиционирующий вспомогательный блок для поддержкипри позиционировании манипулирующей руки в координатной системе устройства для роботизированной хирургии. Устройство имеет инструментальный блок, который включает в себя хирургический инструмент с инструментальным хвостовиком. Проксимальный конец инструментального хвостовика выполнен с возможностью направления через отверстие в теле (далее - телесное отверстие) пациента к целевой зоне. Инструментальный блок выполнен с возможностью соединения с манипулирующей рукой устройства.
В минимально-инвазивной хирургии все более применяются так называемые телеманипуляторные системы, которые также называются роботоассистирующими системами или обобщенно устройствами для роботизированной хирургии. С помощью устройства для роботизированной хирургии хирургические инструменты на основании ввода данных управляются в своем положении или ориентации. Кроме того, хирургические инструменты присоединяются к телеманипуляторной системе механически, электрически и/или оптически, чтобы обеспечить возможность реализации активного позиционирования и ориентации хирургического инструмента, а также желаемого манипулирования хирургического инструмента. Для этого хирургические инструменты, которые наряду с инструментами с концевыми эффекторами включают в себя также эндоскопы и предназначенные для воздействия медицинские приборы, имеют переходное устройство сопряжения, которое может быть выполнено как блок сопряжения, а также называется как стерильный блок. Кроме того, устройство для роботизированной хирургии имеет, по меньшей мере, одну манипулирующую руку, на проксимальном конце которой предусмотрен блок сопряжения, с которым имеет возможность соединения стерильный блок, чтобы обеспечить механическое, электрическое и/или оптическое сопряжение (стыковку) между манипулирующей рукой и хирургическим инструментом.
Известны устройства, у которых манипулирующая рука и блок сопряжения манипулирующей руки являются нестерильными, а хирургические инструменты - стерильными. Стерильное операционное поле защищается от нестерильных элементов телеманипуляторной системы с помощью стерильного перекрытия. Это стерильное перекрытие может включать в себя стерильный шлюз, который предусмотрен между блоком сопряжения манипулирующей руки и стерильным блоком хирургического инструмента. Такой стерильный шлюз обеспечивает стерильное перекрытие нестерильных соединительных элементов блока сопряжения манипулирующей руки после отделения стерильного блока инструментального блока от манипулирующей руки. Такая конструкция со стерильным шлюзом известна, например, из не опубликованных патентных заявок DE 10 2014 117 407.0 и DE 10 2014 117 408.9.
Кроме того, из документа US 7,666,191 В1 известна телеманипуляторная система, в которой нестерильные манипулирующие руки перекрываются посредством стерильной пленки. Блок сопряжения манипулирующей руки включает в себя четыре вращательных исполнительных элемента, которые соединяются с первой стороной интегрированного в стерильную пленку стерильного адаптера. Этот стерильный адаптер включает в себя четыре интегрированных, установленных с возможностью вращения передаточных средства, которые промежуточно включены между блоком сопряжения манипулирующей руки и стерильным блоком хирургического инструмента.
Из DE 102 42 953 А1 известно формирование группы данных о теле пациента с помощью визуализационного способа и представление в координатной системе. Кроме того, три, не лежащие в одной плоскости базовые точки связываются с помощью координатной системы.
При настройке известных устройств для роботизированной хирургии точки входа хирургических инструментов задаются на лежащем на операционном столе пациенте и исходя из этого сопряженные с манипулирующими руками хирургические инструменты с инструментальными наконечниками ориентируются на заданные места входа. Ориентирование инструментов относительно целевой зоны происходит обслуживающим персоналом исходя из его опыта. Технический контроль или возможность контроля ориентации манипулирующей руки хирургического инструмента относительно целевой зоны в уровне техники не предусмотрен.
Задачей настоящего изобретения является предоставить устройство и способ для роботизированной хирургии, в которых возможна простая ориентация хирургических инструментов, включая эндоскопы, относительно предусмотренной целевой зоны. Далее, может предоставляться позиционирующий вспомогательный блок для поддержки при позиционировании манипулирующей руки устройства для роботизированной хирургии.
Эта задача решается посредством устройства с признаками пункта 1 формулы изобретения, а также посредством способа и позиционирующего вспомогательного блока с признаками соответствующих независимых пунктов формулы изобретения. Предпочтительные усовершенствования изобретения приведены в зависимых пунктах формулы изобретения.
Соответствующее изобретению устройство для роботизированной хирургии имеет инструментальный блок, который включает в себя хирургический инструмент, проксимальный конец которого выполнен с возможностью направления через телесное отверстие пациента к целевой зоне, заданной посредством координат координатной системы устройства. Далее, устройство включает в себя позиционирующий вспомогательный блок, который излучает свет в виде пучка лучей. Устройство включает в себя, по меньшей мере, одну манипулирующую руку, с которой по выбору может соединяться позиционирующий вспомогательный блок или инструментальный блок. При соединении позиционирующего вспомогательного блока с манипулирующей рукой положение средней оси испущенного позиционирующим вспомогательным блоком пучка лучей совпадает с положением продольной оси инструментального хвостовика инструментального блока, который соединен вместо позиционирующего вспомогательного блока с манипулирующей рукой. Устройство включает в себя управляющий блок, который при соединении позиционирующего вспомогательного блока с манипулирующей рукой определяет перпендикулярный к средней оси промежуточный вектор между средней осью и заданной посредством координат целевой зоной и который формирует и предпочтительно выдает первую управляющую информацию, если величина определенного промежуточного вектора имеет первое предварительно настроенное значение и/или находится ниже него.
Посредством такого устройства для роботизированной хирургии достигается то, что манипулирующая рука может просто позиционироваться с помощью позиционирующего вспомогательного блока таким образом, что соединенный вместо позиционирующего вспомогательного блока с манипулирующей рукой инструментальный блок имеет правильную позицию относительно предусмотренного места ввода в теле подвергающегося оперированию пациента, а также относительно целевой зоны, заданной посредством координат xz, yz, zz в координатной системе X, Y, Z устройства.При этом, позиция включает в себя, в частности, положение и ориентацию продольной оси инструментального хвостовика хирургического инструмента инструментального блока.
Вследствие этого, является возможной простая ориентация манипулирующей руки устройства для роботизированной хирургии перед оперативным вмешательством в пациента. Таким образом, является возможным, что позиционирование и ориентация манипулирующей руки может выполняться не врачом, а подходящим для этого персоналом. В таком случае, врачу вменяется в обязанность исключительно проверка позиции позиционированных с помощью позиционирующего вспомогательного блока инструментальных блоков. Хирургическим инструментом в смысле изобретения являются, в частности, эндоскопы, такие как стержневые эндоскопы, или хирургические инструменты с концевым эффектором.
Преимуществом является, если управляющий блок формирует и предпочтительно выдает, по меньшей мере, вторую управляющую информацию тогда, когда величина определенного промежуточного вектора имеет второе предварительно настроенное значение или находится ниже него. Таким образом, посредством второй управляющей информации может отмечаться корректная ориентация положения продольной оси инструментального хвостовика инструментального блока относительно целевой зоны.
Предпочтительно, второе предварительно настроенное значение является нулем или приближенным к значению нуль значением, так что средняя ось пучка лучей, соответственно, продольная ось хирургического инструмента проходит через целевую зону. Вследствие этого, является возможным особенно простое позиционирование манипулирующей руки относительно ее позиции в пространстве и ее ориентирование относительно продольной оси хирургического инструмента.
Определенная величина перпендикулярного промежуточного вектора является, предпочтительно, величиной наикратчайшего перпендикулярного промежуточного вектора между средней осью и целевой зоной.
Далее, является предпочтительным, если управляющий блок передает сформированную первую управляющую информацию и сформированную вторую управляющую информацию на позиционирующий вспомогательный блок. Вследствие этого достигается то, что управляющая информация может далее обрабатываться и выдаваться в позиционирующем вспомогательном блоке.
Кроме того, является предпочтительным, если устройство и/или позиционирующий вспомогательный блок имеет блок выдачи, который на основании первой управляющей информации выдает первый акустический и/или первый оптический сигнал и/или на основании второй управляющей информации выдает только второй акустический или второй оптический сигнал. Посредством оптических и/или акустических сигналов обслуживающий персонал может просто информироваться о правильной или подлежащей коррекции ориентации соединенного с манипулирующей рукой позиционирующего вспомогательного блока, так что простым образом поддерживается правильное позиционирование манипулирующей руки перед хирургическим вмешательством. Первый и/или второй оптический сигнал может выдаваться с помощью определенного позиционирующим вспомогательным блоком пучка лучей, в частности, посредством изменения длин волн спектра длин волн испущенного пучком лучей света, посредством формирования/изменения формы пучка лучей и/или посредством выдачи световых импульсов или изменения частоты и/или длительности световых импульсов.
Кроме того, является предпочтительным, если первый акустический сигнал является нарастающим и убывающим звуком или мелодией с первой частотой воспроизведения, и что второй акустический сигнал является непрерывным звуком. При этом, мелодия включает в себя предпочтительно несколько одинаковых звуков. Частота воспроизведения может увеличиваться с уменьшением определенной величины промежуточного вектора, так что обслуживающий персонал посредством частоты воспроизведения акустически информируется о приближении, соответственно, удалении к, соответственно, от целевой зоны.
Выдача акустического сигнала может осуществляться на управляющем блоке, пульте управления или на позиционирующем вспомогательном блоке.
Альтернативно или дополнительно, первый оптический сигнал может быть мигающим световым сигналом с первой частотой мигания, а второй оптический сигнал - непрерывным световым сигналом. При этом, луч первого светового сигнала и луч второго светового сигнала могут иметь одну и ту же длину волны, соответственно, спектр длин волн. Мигающий сигнал создается, в частности, пульсирующим световым лучом. Непрерывный световой сигнал создается предпочтительно с помощью непрерывного светового луча. Частота мигания может увеличиваться с уменьшением величины промежуточного вектора до целевой зоны, а при увеличении величины промежуточного вектора до целевой зоне - уменьшаться. Выдача оптического сигнала может осуществляться на управляющем блоке, пульте управления или на позиционирующем вспомогательном блоке.
Альтернативно или дополнительно является предпочтительным, если позиционирующий вспомогательный блок для формирования первого оптического сигнала излучает луч с первой длиной волны, а для формирования второго оптического сигнала излучается луч с отличной от первой длины волны второй длиной волны. Для формирования оптических сигналов применяется луч с длиной волны в видимом диапазоне. Предпочтительно, луч первой длины волны является красным лучом (светом), а луч второй длины волны является зеленым лучом (светом). Вследствие этого, производится информирование обслуживающего персонала о позиции и ориентации манипулирующей руки, которое с помощью светового сигнала может интуитивно просто пониматься. Выдача оптического сигнала может производиться на управляющем блоке, на пульте управления или на позиционирующем вспомогательном блоке.
Особенно предпочтительным является, если позиционирующий вспомогательный блок для формирования первого и/или второго оптического сигнала оборудован блоком, который определяет световой пучок, посредством которого на плоскость проецирования с помощью светового пучка осуществляется отображение перекрестия нитей и/или, по меньшей мере, круга, концентрично расположенного вокруг средней оси светового пучка. При этом, плоскость проецирования может быть поверхностью тела пациента или уже введенным в тело пациента троакаром. Вследствие этого возможно просто направлять световой луч на имеющееся или запланированное, в частности, уже отмеченное, место входа для ввода хирургического инструмента в тело пациента. Перекрестие нитей и/или концентрично расположенный круг могут просто ориентироваться на это желаемое место входа.
При этом, является преимуществом, если световой луч для формирования первого и/или второго оптического сигнала излучаются под углом в диапазоне между 15° и 35°. Вследствие этого, обеспечивается подходящая область изображений для проецирования оптического сигнала на поверхность пациента или на введенный в тело пациента троакар. Особенно предпочтительным является, если с помощью светового пучка для формирования первого и/или второго оптического сигнала отображение нескольких расположенных концентрично вокруг средней оси светового пучка кругов, причем круги предпочтительно имеют одинаковое угловое расстояние относительно общего угла отражения. Предпочтительно, величина углового расстояния альфа(k) между отдельными кругами следует из следующего уравнения:
альфа(k) = альфа(g)/2*i),
причем
альфа(g) - общий угол отражения
i - количество кругов.
При пяти кругах угол отражения альфа(k) кругов между собой составляет 2,82° при общем угле отражения 28,2°.
Кроме того, является предпочтительным, если позиционирующий вспомогательный блок имеет источник энергии для питания блока формирования сигнала для формирования первого и/или второго оптического и/или для формирования первого акустического и/или второго акустического сигнала. Блок формирования сигнала может являться составной частью электрической схемы. Вследствие этого, необходимая для позиционирования манипулирующей руки с помощью позиционирующего блока информация может просто косвенно выдаваться позиционирующим вспомогательным блоком, вследствие чего становится возможной простая и компактная конструкция.
Энергопитающий блок может иметь батарею, аккумулятор, конденсатор или систему для беспроводной передачи энергии от блока сопряжения манипулирующей руки к вспомогательному позиционирующему блоку. Энергопитающий блок на стороне блока сопряжения манипулирующей руки может включать в себя также RFID-считыватель и/или печатающий блок, с помощью которого RFID-система позиционирующего вспомогательного блока снабжается энергией и осуществляется передача данных между RFID-считывателем и/или печатающим блоком и позиционирующим вспомогательным блоком. Альтернативно или дополнительно, может использоваться система катушек для передачи энергии, как она вообще известна в уровне техники для беспроводного энергопитания.
Кроме того, является предпочтительным, если управляющий сигнал управляющего блока и/или другая информация выполнена с возможностью беспроводной передачи к вспомогательному позиционирующему блоку с помощью беспроводной передачи данных, оптически посредством оптического переходного устройства или посредством жестко смонтированного соединения через электрический контакт.
Кроме того, позиционирующий вспомогательный блок может иметь RFID-транспондер, причем информация записывается в регистр, соответственно, накопитель RFID-транспондера. Первая и вторая управляющая информация могут передаваться к RFID-транспондеру с помощью RFID-считывающего и/или печатающего блока блока сопряжения манипулирующей руки. Для формирования первого и/или второго оптического сигнала позиционирующий вспомогательный блок предпочтительно включает в себя источник света, в частности, источник света включает в себя, по меньшей мере, один лазерный источник света, по меньшей мере, один одноцветный или многоцветный LED-источник света (светодиодный источник света), включающий в себя, по меньшей мере, два светодиода LED-источник света, причем светодиоды излучают свет на разной длине волны, по меньшей мере, одну лампу накаливания с или без цветного фильтра. Вследствие этого, свет для излучения светового пучка может просто формироваться в позиционирующем вспомогательном блоке.
Передача энергии и/или передача данных может также осуществляться посредством электрических контактов и/или без использования проводов и/или посредством оптического переходного устройства бинаправленно между позиционирующим вспомогательным блоком и блоком сопряжения.
Кроме того, является предпочтительным, если как позиционирующий вспомогательный блок, так и инструментальный блок выполнены с возможностью соединения с манипулирующей рукой посредством соединенного с блоком сопряжения манипулирующей руки стерильного шлюза. Посредством этого стерильного шлюза может осуществляться стерильное разъединение нестерильного блока сопряжения от стерильной области. Предпочтительно, при сопряжении стерильного блока инструментального блока со стерильным шлюзом открываются стерильные клапаны стерильного шлюза, так что может устанавливаться непосредственное соединение между элементами стерильного блока и блока сопряжения. При соединении позиционирующего вспомогательного блока со стерильным шлюзом стерильные клапаны открываются или, альтернативно, остаются закрытыми. После разъединения позиционирующего вспомогательного блока и стерильного шлюза стерильные клапаны являются закрытыми. Предпочтительно, стерильный блок имеет стерильные клапаны, которые при соединении стерильного блока со стерильным шлюзом открываются, так что является возможным непосредственное соединение между передаточными элементами, в частности, механическими приводными элементами, между блоком сопряжения и стерильным блоком. После разъединения стерильного блока и стерильного шлюза как клапаны шлюза, так и стерильные клапаны опять закрываются, так что стерильно перекрыты как передаточные элементы стерильного блока, так и передаточные элементы блока сопряжения. Кроме того, электрические и/или оптические соединения между блоком сопряжения и позиционирующим вспомогательным блоком выполнены с возможностью установления посредством стерильного блока.
Второй аспект изобретения касается позиционирующего вспомогательного блока для поддержки при позиционировании манипулирующей руки в координатной системе устройства для роботизированной хирургии, причем позиционирующий вспомогательный блок выполнен с возможностью соединения вместо инструментального блока с блоком сопряжения манипулирующей руки. Позиционирующий вспомогательный блок имеет источник света, который излучает свет в виде светового пучка, причем положение средней оси излученного источником света светового пучка соединенного с блоком сопряжения позиционирующего вспомогательного блока совпадает с положением продольной оси хирургического инструмента соединенного с блоком сопряжения инструментального блока. Кроме того, позиционирующий вспомогательный блок имеет электронную схему с переходным устройством для приема первой управляющей информации, которая сообщает, что величина определенного, перпендикулярного к средней оси промежуточного вектора между заданной посредством координат xz, yz, zz координатной системы целевой зоной и средней осью имеет первое предварительно настроенное значение или не превышает его. С помощью такого позиционирующего вспомогательного блока манипулирующая рука может простым образом позиционироваться относительно заданной целевой зоной, т.е. приводиться в соответствующее положение и ориентацию. Переходное устройство электронной схемы является, предпочтительно, переходным устройством к стерильному блоку устройства, которое, предпочтительно, определяет величину перпендикулярного средней оси промежуточного вектора между заданной посредством координат xz, yz, zz координатной системы целевой зоной и средней осью и проверяет, имеет ли определенная величина первое предварительно настроенное значение или пренижает ли его. Управляющий блок в зависимости от результата проверки формирует первую и/или вторую управляющую информацию и передает ее посредством переходного устройства к электронной схеме.
Кроме того, переходное устройство электронной схемы может служить для приема второй управляющей информации, которая указывает, что величина промежуточного вектора между координатами xz, yz, zz целевой зоны и средней осью имеет второе предварительно установленное значение или пренижает его. Предпочтительно, вторым предварительно настроенным значением является ноль.
Третий аспект касается способа для позиционирования манипулирующей руки в координатной системе устройства для роботизированной хирургии, в котором определяются координаты xz, yz, zz целевой зоны пациента. Для позиционирования манипулирующей руки устройства для роботизированной хирургии, в частности, для подготовки операции на пациенте, вместо инструментального блока позиционирующий вспомогательный блок соединяется с блоком сопряжения манипулирующей руки. Посредством позиционирующего вспомогательного блока свет излучается в виде светового пучка, причем положение средней оси излученного соединенным с блоком сопряжения позиционирующим вспомогательным блоком светового пучка совпадает с положением продольной оси хирургического инструмента соединенного вместо позиционирующего вспомогательного блока с манипулирующей рукой инструментального блока. Продольная ось хирургического инструмента является, в частности, продольной осью инструментального хвостовика хирургического инструмента. При соединении позиционирующего вспомогательного блока с манипулирующей рукой с помощью управляющего блока определяется величина перпендикулярного к средней оси промежуточного вектора между средней осью и заданной посредством координат xz, yz, zz целевой зоной. Первый оптический и/или акустический сигнал выдается, если определенная величина имеет первое предварительно настроенное значение и/или пренижает его. Вследствие этого, обеспечивается то, что средняя ось светового пучка, соответственно, в дальнейшем продольная ось хирургического инструмента проходит как через запланированное, в частности, уже отмеченное, или имеющееся операционное телесное отверстие пациента, так и через целевую зону. Вследствие этого, является простым и возможным простое интуитивное правильное позиционирование манипулирующей руки, в частности, для подготовки устройства для роботизированной хирургии для хирургического вмешательства. Для этого не требуется никакого специально обученного медицинского специалиста, в частности, врача.
Кроме того, является преимуществом, если второй оптический и/или акустический сигнал выдается тогда, когда определенная величина промежуточного вектора имеет второе предварительно настроенное значение или пренижает его. Предпочтительно, вторым предварительно настроенным значением является ноль.
Манипулирующая рука, предпочтительно, ориентируется вручную так, что средняя ось светового пучка проходит через запланированное, в частности, отмеченное, или имеющееся операционное телесное отверстие пациента. В дальнейшем, манипулирующая рука ориентируется таким образом, что выдается первый и/или второй оптический и/или акустический сигнал.
Кроме того, также является предпочтительным, если манипулирующая рука сначала ориентируется так, что средняя ось светового пучка проходит через запланированное, в частности, уже отмеченное, или фактическое операционное телесное отверстие пациента и выдается первый и/или второй оптический и/или акустический сигнал. Вследствие этого, возможно простое дальнейшее ориентирование и позиционирование манипулирующей руки до тех пор, пока величина определенного промежуточного вектора не будет иметь второе значение или не будет пренижать его.
Является предпочтительным, если манипулирующая рука на первом этапе ориентируется так, что центральная ось светового пучка проходит через запланированное или имеющееся операционное телесное отверстие пациента, и что манипулирующая рука на втором этапе перемещается так, что определенный с помощью управляющего блока промежуток между проходящей через запланированное или имеющееся операционное телесное отверстие пациента средней осью и заданной координатами целевой зоной имеет или пренижает второй предварительно настроенный промежуток, так что выдается второй оптический и/или акустический сигнал. Для этого, манипулирующая рука перемещается самим устройством автоматически или вручную. Также, часть ориентирующего перемещения может осуществляться самим устройством автоматически, а часть ориентирующего перемещения может осуществляться вручную обслуживающим персоналом.
Дополнительно, на третьем этапе позиционирующий вспомогательный блок может отделяться от манипулирующей руки, а на четвертом этапе инструментальный блок может соединяться с манипулирующей рукой. При этом, как на третьем, так и на четвертом этапе положение и ориентация манипулирующей руки неизменно остается в заданной на втором этапе позиции и ориентации.
Альтернативно, манипулирующая рука на первом этапе может ориентироваться так, что определенная с помощью управляющего блока величина промежуточного вектора между средней осью и координатами xz, yz, zz целевой зоны имеет или пренижает второй предварительно настроенный промежуток. Затем, на втором этапе, манипулирующая рука ориентируется так, что средняя ось светового пучка проходит через имеющееся или запланированное, в частности, отмеченное, операционное телесное отверстие пациента и, при этом, средняя ось светового пучка остается ориентированной на целевую зону. При этом, на первом и/или втором этапе манипулирующая рука может перемещаться автоматически самими устройством и/или вручную обслуживающим персоналом.
Особенно предпочтительным является, если на третьем этапе позиционирующий вспомогательный блок отделяется от манипулирующей руки, а на четвертом этапе инструментальный блок соединяется с манипулирующей рукой. Позиция и ориентация манипулирующей руки во время проведения третьего и четвертого этапа неизменно остается в созданной на втором этапе позиции, т.е. положении и ориентации.
Посредством показанных решений задачи изобретения посредством независимых и зависимых пунктов формулы изобретения можно достичь оптимального предварительного позиционирования инструментального блока посредством ручного и/или автоматического предварительного позиционирования манипулирующей руки устройства для роботизированной хирургии. Для этого, согласно изобретению позиционирующий вспомогательный блок вместо собственно инструментального блока с хирургическим инструментом соединяется с блоком сопряжения манипулирующей руки. При этом, позиционирующий вспомогательный блок берет на себя несколько функций:
1. Посредством проецирования светового пучка на поверхность пациента, в частности, посредством проецирования оптически различимого рисунка, как перекрестие нитей или концентрические круги или подобное, для оператора указывается позиционирование запланированного или имеющегося телесного отверстия для введения хирургического инструмента в тело пациента. При этом, световой луч, соответственно, рисунок показывает точку на теле пациента, в которой хирургический инструмент соединенного с манипулирующей рукой инструментального блока проникал бы в правильном положении. Затем, в этом месте устанавливается троакар, через который потом проводится инструментальный хвостовик хирургического инструмента.
2. Посредством цвета спроецированного светового пучка или рисунка и/или посредством акустического сигнала выдается информация обсуживающему персоналу, которая указывает, осуществлено ли направление, т.е. ориентирование, образованного блоком сопряжения манипулирующей руки переходного устройства сопряжения так, что удлинение инструментального хвостовика хирургического инструмента инструментального блока проходит через целевую зону. Так, например, зеленое перекрестие нитей указывает правильное ориентирование инструментального хвостовика, в то время как красное перекрестие нитей сигнализирует, что ориентирование инструментального хвостовика подлежащего соединению с манипулирующей рукой инструментального блока не является ориентированным так, что удлинение инструментального хвостовика, соответственно, его продольной оси не показывает на целевую зону. Манипулирующая рука может иметь телескопическую систему для перемещения блока сопряжения в направлении телескопической оси телескопической системы. Положение телескопической системы при выдвигании и вдвигании телескопической системы регулируется так, что инструментальный хвостовик перемещается вдоль своей удлиненной продольной оси, т.е. положение продольной оси в пространстве остается неизменным.
Посредством комбинации обеих описанных ранее функций оператор различает, настроены ли одновременно успешно позиционирование (световой луч попадает на желаемое место ввода в правильном положении) и ориентирование соответствующего цвета светового пучка (например, зеленый, и/или акустический сигнал). В этой позиции введенный в правильном месте троакар может оптимально соединяться с предусмотренным в виде опции для этого переходным устройством сопряжения манипулирующей руки. В каждом случае, в этой позиции манипулирующая рука находится в оптимальном исходном положении для запланированного оперативного вмешательства.
Предпочтительно, релевантные области анатомии пациента, в частности, целевая зона, определены посредством координат x’z, y’z, z’z в координатной системе X’, Y’, Z’ пациента. Начало отсчета координатной системы X’, Y’, Z’ пациента может быть задано, например, в точке пересечения сагиттальных плоскостей с дорсально лежащей фронтальной плоскостью, а также с поперечной плоскостью. Координаты координатной системы пациента находятся в фиксированном известном отношении с координатной системой X, Y, Z устройства для роботизированной хирургии, так что координаты x, y, z элементов устройства могут просто пересчитываться в координаты x’, y’, z’ координатной системы X’, Y’, Z’ пациента, а координаты x’, y’, z’ координатной системы X’, Y’, Z’ пациента, как например, координаты x’z, y’z, z’z целевой зоны, могут просто пересчитываться в координаты xz, yz, zz координатной системы X, Y, Z устройства.
Например, координаты x’z, y’z, z’z целевой зоны могут определяться в координатной системе X’, Y’, Z’ пациента за счет того, что выполняется ручное измерение пациента, например, с помощью измерительной рулетки. При этом, точное до сантиметра определение координат xz, yz, zz целевой зоны в координатах координатной системы X’, Y’, Z’ пациента и их преобразование в координаты xz, yz, zz координатной системы X, Y, Z устройства предоставляет более чем достаточную точность, чтобы хирургический инструмент мог достаточно хорошо позиционироваться и ориентироваться. Альтернативно, измерение целевой зоны может осуществляться также непосредственно в координатах xz, yz, zz координатной системы устройства.
Кроме того, современные способы визуализации, как например, компьютерная томография или магнитно-резонансная томография, предоставляют данные, которые обеспечивают более точное определение координат в координатной системе X’, Y’, Z’ пациента и исходя их этого в координатной системе устройства.
Предпочтительно, позиционирующий вспомогательный блок имеет хвостовик, положение и ориентация которого совпадает с положением и ориентацией инструментального хвостовика хирургического инструмента инструментального блока, имеющего возможность соединения вместо позиционирующего вспомогательного блока с манипулирующей рукой. Хвостовик позиционирующего вспомогательного блока имеет, предпочтительно, длину, которая во вдвинутом состоянии телескопической системы манипулирующей руки является настолько длинной, что хвостовик вводится вглубь приблизительно на 1 см во введенный в правильное место троакар. Также, в этом состоянии имеющийся в виде опции на манипулирующей руке держатель троакара может соединяться с троакаром. Во вдвинутом состоянии телескопической системы проксимальный конец хвостовика имеет промежуток в диапазоне от 5 см до 30 см, предпочтительно в диапазоне от 10 см до 25 см и/или контактирует своим проксимальным концом с направляющим элементом имеющегося в виде опции держателя троакара. Посредством ориентирования и позиционирования манипуляторной руки с помощью позиционирующего вспомогательного блока держатель троакара позиционирован квази анатомически правильно для соединения с троакаром, если хвостовик позиционирующего вспомогательного блока погружен на 1 см вглубь в троакар.
В комбинации с дооперационно определенными данными целевой зоны, в частности, с помощью компьютерной томографии или магнитно-резонансной томографии, во время процесса наладки и стыковки с помощью позиционирующего вспомогательного блока положение удлинения средней оси светового пучка, соответственно, продольной оси инструментального хвостовика после замены позиционирующего вспомогательного блока на инструментальный блок, относительно целевой зоны может отображаться на размещенном дополнительно в поле зрения оператора мониторе. Предпочтительно, кроме того, расположенная перпендикулярно к продольной оси инструментального хвостовика секущая плоскость представляется посредством набора данных компьютерной томографии (КТ) и/или магнитно-резонансной томографии (МРТ) пациента. Секущая плоскость посредством набора данных КТ и/или МРТ проходит через целевую зону операционного поля. Тем самым, оператор наряду со спроектированным световым лучом на имеющееся или запланированное операционное телесное отверстие и дополнительной акустической и оптической информацией о промежутке между средней осью светового пучка, соответственно, продольной оси хирургического инструмента и целевой зоной получает дополнительное вспомогательное средство для принятия решения, чтобы иметь возможность проводить оптимальную установку манипулирующей руки устройства для роботизированной хирургии для запланированного хирургического вмешательства. Устройство для роботизированной хирургии имеет, предпочтительно, несколько, в частности, четыре или пять, манипулирующих рук, из которых предпочтительно одна соединяется с эндоскопом, а другие манипулирующие руки соединяются с инструментальными блоками с хирургическими инструментами с концевыми эффекторами для осуществления хирургического вмешательства. В частности, предусмотренные для инструментальных блоков с хирургическими инструментами с концевыми эффекторами манипулирующие руки позиционируются и ориентируются, предпочтительно, друг за другом с помощью позиционирующего вспомогательного блока, чтобы в дальнейшем проводить необходимые для хирургического вмешательства манипуляции. При этом, координаты целевой зоны, предпочтительно, могут указывать пространственную область, так что релевантная для установки манипулирующих рук целевая зона имеет трехмерную размерность. Также, для каждого хирургического инструмента может быть предусмотрена отдельная целевая зона, причем целевые зоны могут, по меньшей мере, частично перекрываться.
Позиционирующий вспомогательный блок включает в себя, предпочтительно, электронную схему с приемным и/или передающим блоком, посредством которого информация передается к управляющему блоку устройства для роботизированной хирургии и/или от управляющего блока устройства для роботизированной хирургии к вспомогательному позиционирующему блоку, чтобы:
- опознавать автоматически как позиционирующий вспомогательный блок,
- обеспечить использование позиционирующего вспомогательного блока в стерильном операционном поле при одной единственной операции, причем при операции один единственный позиционирующий вспомогательный блок может использоваться для позиционирования нескольких манипулирующих рук,
- передать управляющую информацию к позиционирующему вспомогательному блоку и/или к управляющему блоку.
Позиционирующий вспомогательный блок может иметь собственный источник энергии, например, аккумулятор или батарею, чтобы обеспечить энергией электронную схему, или он имеет электрические контакты для электрического соединения с блоком сопряжения манипулирующей руки и/или содержит катушки связи и/или антенны, чтобы передавать энергию от блока сопряжения манипулирующей руки к позиционирующему вспомогательному блоку.
Свет от позиционирующего вспомогательного блока излучается, предпочтительно, с помощью проекционного устройства, как например, формирующей луч оптики, которое проецирует, в частности, желаемый световой рисунок, как например перекрестие нитей или концентрические круги, на поверхность пациента или на введенный в пациента троакар.
Управляющий блок устройства для роботизированной хирургии служит, в частности,
- для ввода и хранения координат целевой зоны в координатной системе пациента и/или координатной системе устройства,
- для вычисления ориентации подлежащего применению инструмента из позиций сегментов манипулирующей руки,
- для управления использования позиционирующего вспомогательного блока, в частности, для распознавания позиционирующего вспомогательного блока и для обеспечения многократного использования в различных операциях,
- для настройки активации оптического и/или акустического сигнала в управляющем блоке и/или в позиционирующем вспомогательном блоке, как например, для активации включенных состояний, источники света выключены, включен только источник света зеленого света, включен только источник света красного света, или включен только источник света белого света, включен только источник света зеленого света, включен только источник света красного света.
Электронная схема позиционирующего вспомогательного блока может включать в себя, в частности, RFID-метку, соответственно, формироваться ею.
Целевая зона представляет собой, в частности, целевую операционную зону. Альтернативно или дополнительно целевая зона может задаваться посредством целевой точки, например, посредством средней точки целевой операционной зоны или посредством зависящей от положения другого хирургического инструмента точки. Если другой хирургический инструмент представляет собой уже, по меньшей мере, частично введенный в тело пациента эндоскоп, как например, стержневой эндоскоп, или другую визуализирующую систему для регистрации изображений, по меньшей мере, одного фрагмента целевой операционной зоны, то является предпочтительным, если целевая зона зависит от положения эндоскопа или другой визуализирующей системы. Например, целевая зона может быть задана точкой на оптической оси оптических элементов эндоскопа, соответственно, оптической оси оптических элементов другой визуализирующей системы. Целевая точка представляет собой, в частности, точку в диапазоне глубины резкости, например, фокальную точку, или точку между фокальной точкой и проксимальным концом эндоскопа.
Эта другая визуализирующая система может представлять собой, в частности, базирующуюся на невидимом свете оптическую систему, в частности, рентгеновскую систему, систему компьютерной томографии, систему магниторезонансной томографии или другую подходящую визуализирующую систему.
В качестве «проксимального» в общем случае рассматривается обращенный к пациенту конец любого элемента. В качестве «дистального» в общем случае рассматривается обращенный от пациента конец любого элемента.
Другие признаки и преимущества выявляются из последующего описания, которое более подробно поясняет изобретение на основе примеров осуществления в сочетании с приложенными фигурами, на которых показано:
Фиг.1 - схематический вид сбоку системы для роботизированной хирургии с манипулятором, который имеет четыре манипулирующие руки, с которыми соответственно может соединяться инструментальный блок;
Фиг.2 - схематический вид спереди системы, согласно фиг.1;
Фиг.3 - система для соединения расположенного в стерильной области инструментального блока с нестерильным блоком сопряжения манипулирующей руки;
Фиг.4 - позиционирующий вспомогательный блок согласно первому варианту осуществления;
Фиг.5 - позиционирующий вспомогательный блок согласно второму варианту осуществления;
Фиг.6 - система согласно фиг.3, причем вместо инструментального блока позиционирующий вспомогательный блок согласно фиг. 4, соединяется с блоком сопряжения манипулирующей руки;
Фиг.7 - участок манипулирующей руки с блоком сопряжения и соединенным с блоком сопряжения позиционирующим вспомогательным блоком с выдвинутой телескопической системой манипулирующей руки согласно первому варианту осуществления;
Фиг.8 - система согласно фиг.7, причем телескопическая система вдвинута;
Фиг.9 - система согласно фиг.7, с выдвинутой телескопической системой, причем вместо позиционирующего вспомогательного блока инструментальный блок соединен с блоком сопряжения манипулирующей руки;
Фиг.10 - система согласно фиг.9, причем телескопическая система вдвинута, так что хирургический инструмент направлен вплоть до целевой операционной зоны или выходит за нее;
Фиг.11 - схематическое изображение позиционирующего вспомогательного блока и целевой операционной зоны в координатной системе устройства;
Фиг.12 - схематическое изображение для ориентации соединенного с манипулирующей рукой позиционирующего вспомогательного блока относительно целевой операционной зоны согласно первому образу действий;
Фиг.13 - схематическое изображение для ориентации соединенного с манипулирующей рукой позиционирующего вспомогательного блока относительно целевой операционной зоны согласно второму образу действий;
Фиг.14 - фрагмент тела пациента с четырьмя отмеченными позициями для запланированных телесных отверстий пациента, в который соответственно вводится троакар;
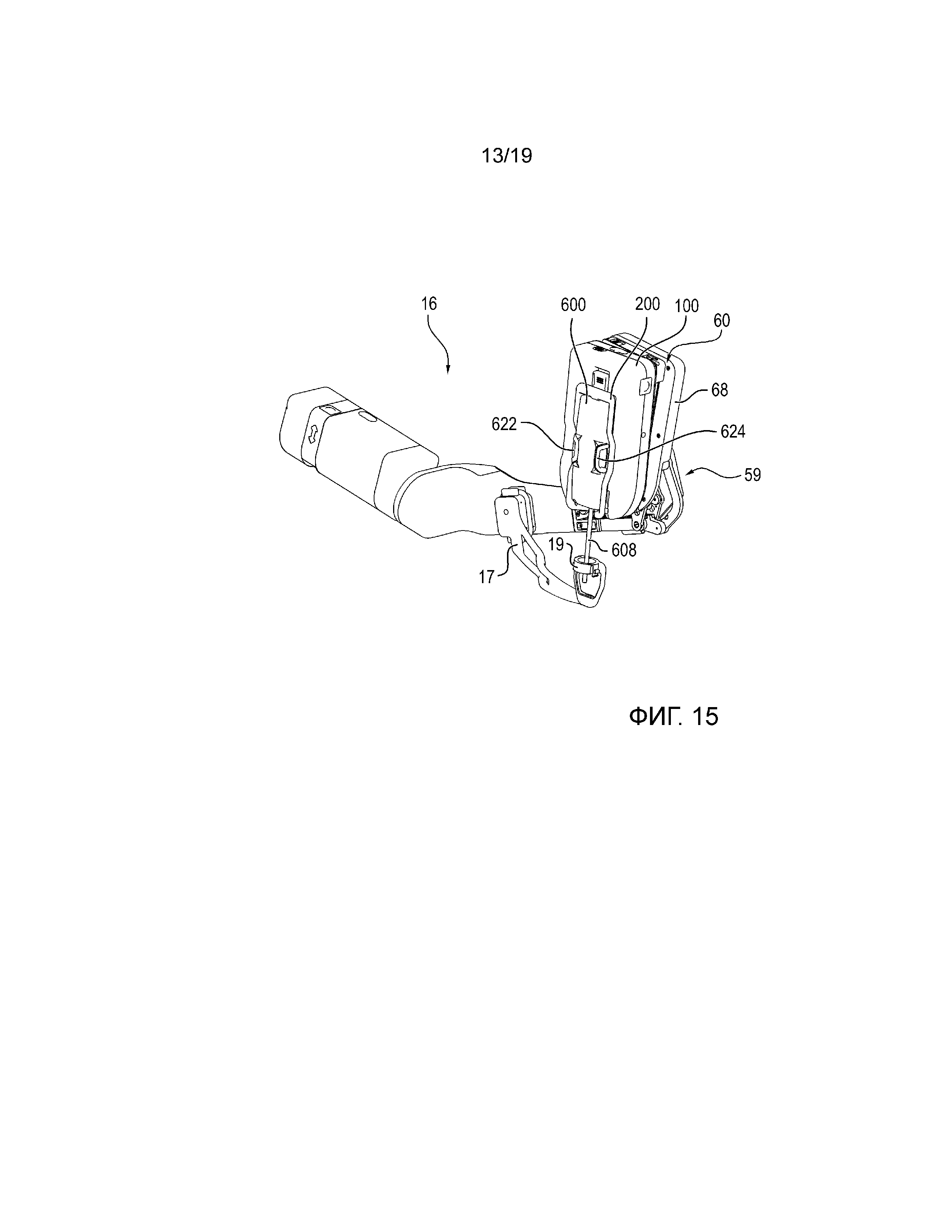
Фиг.15 - система с участком манипулирующей руки с блоком сопряжения и соединенным с блоком сопряжения позиционирующим вспомогательным блоком с вдвинутой телескопической системой манипулирующей руки согласно второму варианту осуществления;
Фиг.16 - система согласно фиг.15, причем держатель троакара соединен с введенным в пациента троакаром;
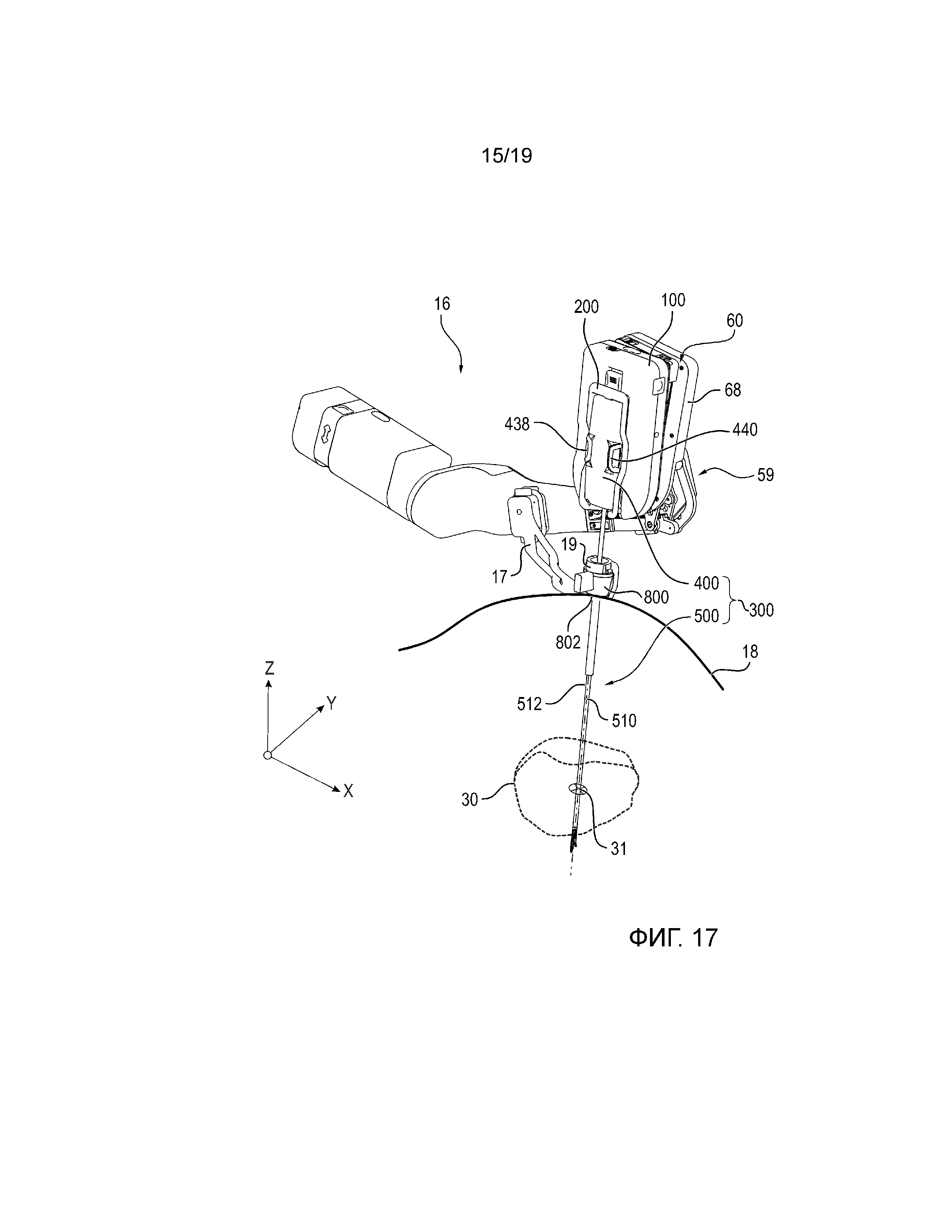
Фиг.17 - система согласно фиг.16, причем при такой же ориентации манипулирующей руки и блока сопряжения вместо позиционирующего вспомогательного блока инструментальный блок соединен с блоком сопряжения манипулирующей руки;
Фиг.18 - система с участком манипулирующей руки с блоком сопряжения и соединенным с блоком сопряжения позиционирующим вспомогательным блоком с выдвинутой телескопической системой манипулирующей руки согласно третьему варианту осуществления с введенным в тело пациента троакаром для последующего введения проксимального конца хирургического инструмента и с, по меньшей мере, частично введенным через другой троакар в тело пациента эндоскопом;
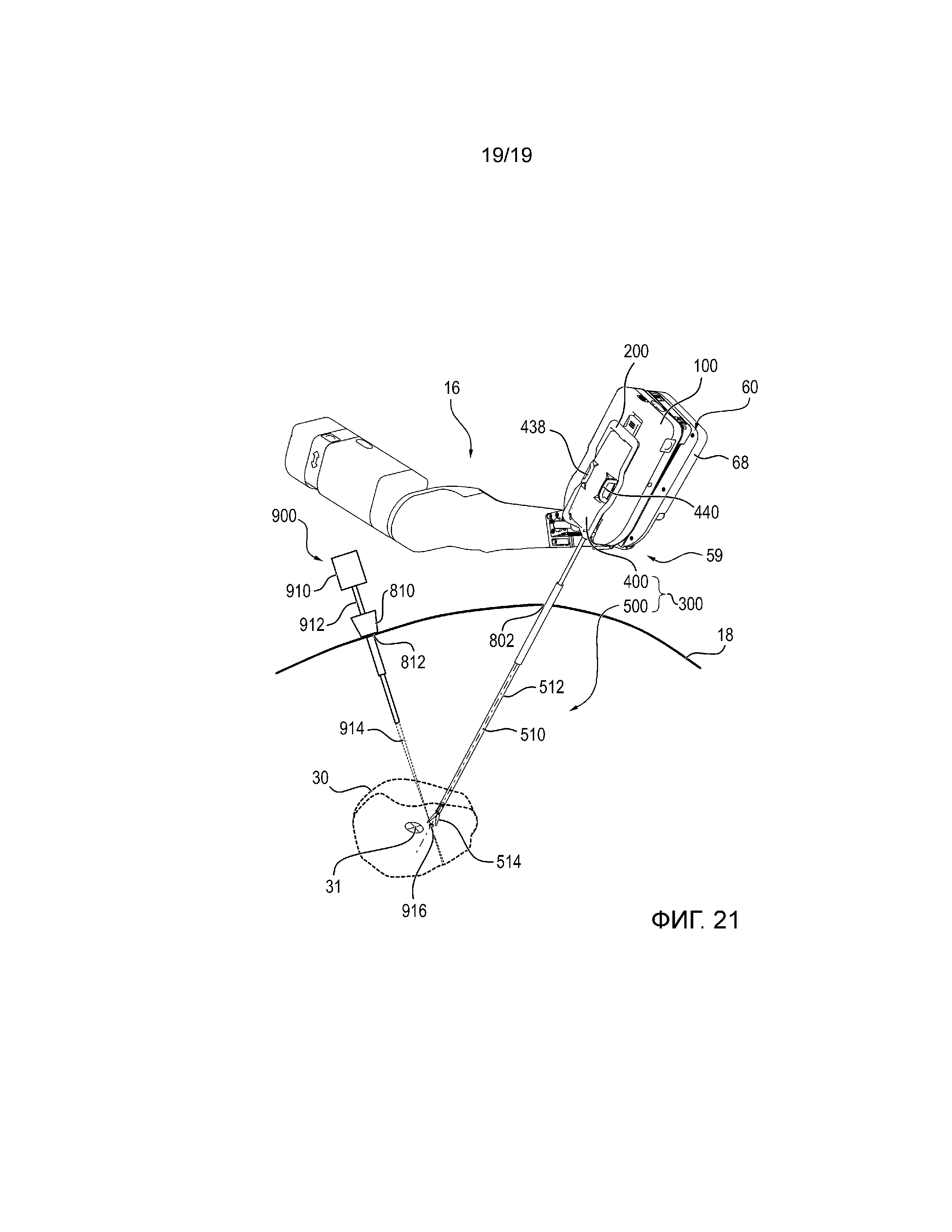
Фиг.19 - система согласно фиг.18, причем положение выдвинутой телескопической системы было изменено, так что средняя ось испущенного позиционирующим вспомогательным блоком светового пучка проходит через заданную целевую зону в теле пациента;
Фиг.20 - система согласно фиг.19, причем позиционирующий вспомогательный блок был заменен на инструментальный блок с хирургическим инструментом без изменения позиции блока сопряжения манипулирующей руки; и
Фиг.21 - система согласно фиг.20 с вдвинутой телескопической системой.
Фиг.1 показывает схематический вид сбоку системы 10 для роботизированной хирургии с манипулятором 12, который имеет штатив 14 и четыре манипулирующие руки 16а - 16d. Манипулятор 12 в целом называется также как устройство для роботизированной хирургии. Система 10 служит для осуществления хирургического вмешательства в позиционированного на операционном столе 34 пациента 18. Исходя из анатомии пациента 18 и подлежащей осуществлению операции определены координаты x’z, y’z, z’z целевой операционной зоны 30 в координатной системе X’, Y’, Z’ пациента и эти координаты x’z, y’z, z’z сохранены в качестве предварительной настройки. Манипулятор 12 имеет координатную систему X’, Y’, Z’ устройства, начало координат которой расположено в опоре 24 штатива 14 манипулятора. Штатив 14 имеет L-образную консоль 28 штатива, на удаленном от опоры 24 штатива конце которой манипулирующие руки 16а-16d соединены через головку 20 штатива.
Операционный стол 34 имеет стойку 32 операционного стола, в которой расположен управляющий блок 36 операционного стола 34 и на котором расположена включающая в себя несколько сегментов поверхность 38 для опирания пациента. Управляющий блок 36 служит для управления перемещения элементов операционного стола 34, в частности, для перестановки длины стойки 32 операционного стола и таким образом для перестановки высоты поверхности 38 для опирания пациента и для перестановки отдельных сегментов, а также наклона и крена поверхности 38 для опирания пациента. Однако, предпочтительным образом перестановка сегментов операционного стола 34 блокируется во время операционного вмешательства с помощью манипулятора 12. Далее, система 10 включает в себя управляющий блок 46 манипулятора 12, а также центральный управляющий блок 40, который через информационные шины соединен с управляющим блоком 46 манипулятора 12, управляющим блоком 36 операционного стола 34, а также пультом 42 управления с блоком 44 индикации. Управляющий блок 40 имеет блок 41 выдачи, а управляющий блок 46 имеет блок 47 выдачи, посредством которых соответственно могут выдаваться оптические и/или акустические сигналы.
Верхняя поверхность поверхности 38 для опирания пациента образует фронтальную плоскость, на которой дорсально лёжа позиционирован пациент 18. Далее, через начало координат координатной системы X’, Y’, Z’ пациента проходит поперечная плоскость, в которой лежат оси X’ и Z’ координат. Кроме того, через начало координат проходит сагиттальная плоскость, в которой лежат оси Z’ и Y’ координат.
Координаты x’z, y’z, z’z целевой операционной зоны 30 в координатной системе X’, Y’, Z’ пациента известны и посредством известного положения координатной системы X’, Y’, Z’ пациента относительно координатной системе X, Y, Z устройства 12 могут просто учитываться при управлении манипулирующими руками 16а-16d, а также соединенным с манипулирующим руками 16а-16d инструментальным блоком для осуществления хирургического вмешательства с помощью манипулятора 12, в частности, могут пересчитываться в координаты xz, yz, zz координатной системы X, Y, Z устройства 12.
Позиция координат y’z, z’z середины целевой операционной области 30 обозначены на фиг.1 относительно осей Y’ и Z’ координат с помощью проходящих через целевую операционную зону 30 штриховых линий.
Фиг.2 показывает схематический вид спереди системы 10 согласно фиг.1. На проксимальном конце манипулирующих рук 16а-16d соответственно расположен блок 100а-100d сопряжения, с которыми соответственно соединен инструментальный блок 300а-300d для осуществления хирургического вмешательства. Инструментальные хвостовики соответствующего хирургического инструмента инструментальных блоков 300а - 300d обозначены штриховыми линиями, которые на фиг.2 от блоков 100а, 100b, 100c, 100d сопряжения и соединенных с этими блоками 100а, 100b, 100c, 100d сопряжения и представленных на фиг.3 стерильных блоков 400а, 400b, 400c, 400d инструментальных блоков 300аб 300b, 300c, 300d доходят до целевой операционной зоны 30. При этом штриховые линии обозначают продольные оси, соответственно, удлиненные продольные оси инструментальных хвостовиков. С помощью проходящих через целевую операционную зону 30 и проходящих параллельно осям X’ и Z’ координат штриховых линий обозначены координаты y’z, z’z средней точки 31 целевой операционной зоны 30 относительно осей X’ и Z’ координат.
Ниже со ссылкой на манипулирующую руку 16а описывается сопряжение инструментального блока 300а через стерильный шлюз 200а с блоком 100а сопряжения манипулирующей руки 16а. Эти выполнения в равной степени имеют силу для других манипулирующих рук 16b-16d и для соединенных с этими манипулирующими руками 16b-16d через стерильные шлюзы 200b - 200d инструментальных блоков 300b-300d. Ниже в целях упрощения ссылочные позиции будут использоваться без использованных для различия между отдельными манипулирующими руками малых букв.
Фиг.3 показывает блок 100 сопряжения манипулирующей руки 16, стерильный шлюз 200, а также инструментальный блок 300 со стерильным блоком 400 и хирургическим инструментом 500, который имеет концевой эффектор 514. Блок 100 сопряжения, стерильный шлюз 220, а также инструментальный блок 300 показаны перед состыковыванием стерильного шлюза 200 с блоком 100 сопряжения и перед последующим состыковыванием стерильного блока 400 со стерильным шлюзом 200. Выполненная в виде стерильной пленки 201 гибкая стерильная оболочка на окружном присоединительном краю 202 стерильного шлюза 200 жестко соединена с ним посредством подходящего соединения, например, зажимного соединения, клеевого соединения, соединения «липучка» и/или сварного соединения, так что стерильная пленка 201 вместе со стерильным шлюзом 200 образует замкнутое стерильное перекрытие вокруг выступающих в стерильную операционную область областей манипулирующей руки 16.
Для лучшего представления на фиг.3 показан только фрагмент стерильной пленки 201 вокруг стерильного шлюза 200. На последующих фигурах стерильная пленка 201 частично не представлена.
Для сопряжения стерильного блока 400 с блоком 100 сопряжения стерильный шлюз 200 расположен между стерильным блоком 400 и блоком 100 сопряжения и в сопряженном/соединенном состоянии стерильного блока 400 с блоком 100 сопряжения позволяет непосредственное сопряжение/соединение первого передаточного средства 102 блока 100 сопряжения и второго не представленного передаточного средства стерильного блока 400.
С помощью первого передаточного средства 102 в настоящем примере осуществления передается как механическая энергия, так и электрическая энергия между блоком 100 сопряжения и стерильным блоком 400. Для этого первое передаточное средство 102 блока 100 сопряжения имеет, например, по меньшей мере, четыре механических приводных элемента 110-116, а второе передаточное средство 406 стерильного блока 400 имеет четыре ответных приводным элементам 110-116 ведомых элемента 412-418. Далее, первое передаточное средство 102 имеет электрический передаточный элемент 104 с двумя электрическими контактами 106, 108, а второе передаточное средство имеет ответный электрическому передаточному элементу 104 первого передаточного средства 102 электрический передаточный элемент.
Далее, первый передаточный элемент 102 включает в себя оптическое передаточное средство 109 для передачи света и/или оптических сигналов. Приводные элементы первого передаточного средства 102 включают в себя первый поступательный приводной элемент 110 и второй поступательный приводной элемент 112 соответственно для передачи поступательного перемещения, а также первый вращательный приводной элемент 114 и второй вращательный приводной элемент 116 для передачи вращательного движения. Первый и второй поступательный приводной элемент 110, 112 выполнены соответственно в виде линейной подъемной вилки, а первый и второй вращательный приводной элемент 114, 116 выполнены в виде приводной шестерни с торцевым зубчатым венцом. Далее, блок 100 сопряжения имеет расположенный в углублении датчик сопряжения, который детектирует образованный посредством выдающегося из стерильного блока 400 первого детектирующего штифта первый детектирующий элемент, если стерильный шлюз 200 корректно сопряжен с блоком 100 сопряжения, а стерильный блок 400 корректно сопряжен со стерильным шлюзом 200.
В случае других примеров осуществления первое и второе передаточное средство могут включать в себя также больше или меньше приводных элементов, ведомых элементов и электрических передаточных элементов, которые передают механическую и/или электрическую энергию посредством непосредственного сопряжения. При этом, в качестве непосредственного сопряжения рассматривается сопряжение передаточных средств, при котором не предусмотрено никаких других передаточных элементов между первыми передаточными средствами и вторыми передаточными средствами для передачи механической и/или электрической энергии и/или оптических лучей, причем, в частности, не предусмотрены никакие электрические, механические или оптические передаточные элементы в расположенном между блоком 100 сопряжения и стерильным блоком 400 стерильном барьере, как например, стерильном шлюзе 200. Далее, блок 100 сопряжения имеет считывающий и записывающий блок 121 для радиочастотной идентификации (РЧИ=RFID (англ. Radio Frequency IDentification) с помощью которого может считываться и/или записываться РЧИ-транспондер 494 стерильного блока 400.
Для соединения блока 100 сопряжения со стерильным шлюзом 200 этот блок 100 сопряжения имеет противолежащие друг другу направляющие пазы 122, 124, в которые вводятся направляющие штифты 204, 206 стерильного шлюза 200 до тех пор, пока они не достигнут переднего конца 123, 125 соответствующего направляющего паза 122, 124. Направляющие штифты 204, 206 выступают наружу на первом конце стерильного шлюза 200 на противолежащих сторонах. Затем противолежащий второй конец стерильного шлюза 200 надавливается вниз, так что стерильный шлюз 200 поворачивается вокруг проходящей через направляющие штифты 204, 206 оси вращения до тех пор, пока фиксирующий носик 126 фиксирующего элемента 128 не войдет в ответную фиксирующую область стерильного шлюза 200.
Деблокирующая кнопка 134 расположена с возможностью поворота вокруг оси вращения и посредством пружины удерживается в своем показанном на фиг.3 фиксирующем положении. Для разъединения фиксирующего соединения пальцем нажимают на деблокирующую кнопку 134 фиксирующего элемента 128, так что пружина натягивается и фиксирующий элемент 128 вместе с фиксирующим носиком 126 поворачивается, так что фиксирующий носик 126 выходит из зацепления с ответным фиксирующим элементом стерильного шлюза 200. Вследствие этого находившийся перед этим в зацеплении с фиксирующим носиком 126 второй конец стерильного шлюза 200 может вновь поворачивается из блока 100 сопряжения. После того как этот второй конец стерильного шлюза был повернут из блока 100 сопряжения, стерильный шлюз 200 может вновь полностью отделяться от блока 100 сопряжения за счет того, что стерильный шлюз 200 с находящимися в зацеплении с направляющими пазами 122, 124 направляющими штифтами 204, 206 втягивается из него вдоль направляющих пазов 122, 124 до тех пор, пока направляющие элементы 204, 206 больше не будут находиться в зацеплении с направляющими пазами 122, 124. Между направляющими пазами 122, 124 и фиксирующим элементом 128 имеется образованная соответствующим углублением в корпусе блока 100 сопряжения приемная область, которая в данном примере осуществления, по меньшей мере, частично окружает стерильный шлюз 200 с трех сторон и со стороны дна.
Стерильный шлюз 200 имеет клапаны 208, 210 шлюзы, которые выполнены с возможностью поворота посредством шарниров. С помощью этих шарниров клапаны 208, 210 шлюза выполнены с возможностью поворота из показанного на фиг.3 закрытого состояния в открытое состояние. В открытом состоянии клапанов 208, 210 шлюза может осуществляться непосредственное (прямое) сопряжение первого передаточного средства 102 блока 100 сопряжения со вторым передаточным средством стерильного блока 400.
На наружной стороне боковых стенок и торцевых стенок стерильного шлюза 200 образован окружной край 202, с которым подходящим образом соединена стерильная пленка 201 стерильного перекрытия.
Далее, стерильный блок 400 имеет расположенные противоположно фиксирующие и исполнительные элементы 438, 440, посредством которых автоматически осуществляется вновь разъединяемое фиксирующее соединение при соединении стерильного блока 400 со стерильным шлюзом 200.
Фиг.4 показывает позиционирующий вспомогательный блок 600 согласно первому варианту осуществления, который соединяется вместо инструментального блока 300 со стерильным шлюзом 200 для позиционирования манипулирующей руки 16 перед запланированным хирургическим вмешательством в пациента посредством стерильного шлюза 200 с блоком 100 сопряжения манипулирующей руки.
Позиционирующий вспомогательный блок 600 имеет стерильные клапаны 602, 604, которые при соединении позиционирующего вспомогательного блока 600 со стерильным шлюзом 200 автоматически деблокируются и открываются до тех пор, пока они не окажутся в показанном на фиг.4 открытом состоянии. При отделении позиционирующего вспомогательного блока 600 от стерильного шлюза 200 стерильные клапаны 602, 604 автоматически закрываются, предпочтительно с помощью силы натяжения, по меньшей мере, одной пружины, и затем блокируются, так что элементы внутри позиционирующего вспомогательного блока 600 стерильно перекрыты с помощью стерильных клапанов 602, 604.
Корпус 606 позиционирующего вспомогательного блока 600 в этом примере осуществления идентичен корпусу стерильного блока 400 инструментального блока 300. В других вариантах осуществления корпус 606 может также отличаться размером и формой. Позиционирующий вспомогательный юлок 600 имеет расположенный в выступающем из корпуса 606 позиционирующего вспомогательного блока 600 стержне 608 источник 610 света. Свет источника 610 света в виде светового пучка 612 с видимым светом излучается формирующим луч оптическим элементом 611 из конца стержня 608 в виде светового пучка 612, средняя ось 614 которого совпадает с продольной осью стержня 608.
Позиционирующий вспомогательный блок 600 имеет два электрических контакта 616, 618, которые при открытых клапанах 602, 604 находятся в электропроводном непосредственном соединении с контактами 106, 108 блока 100 сопряжения. Посредством этих контактов 616, 618 источник 610 света обеспечивается электрической энергией и управляется. В других вариантах осуществления могут быть предусмотрены также три или более электрических контактов 106, 108 блока 100 сопряжения и три или более электрических контактов 616, 618 позиционирующего вспомогательного блока 600, чтобы управлять несколькими источниками 610 излучения, которые излучают свет с различающимися длинами волн. Альтернативно, длина волны выходного света одного единственного источника 610 света может создаваться посредством соответствующей схемы управления в позиционирующем вспомогательном блоке 600, которая, например, посредством различных разностей потенциалов между электрическими контактами 616, 618, управляет различными источниками 610 света или одним источником 610 света так, что этот источник выдает свет различающихся длин волны. Так, например, возможно, что при разнице потенциалов в 5 вольт между электрическими контактами 616, 618 источником 610 света излучается красный свет, а при разнице потенциалов в 12 вольт между электрическими контактами 616, 618 источником 610 света излучается зеленый свет. Источник света 610 может включать в себя, в частности, один или несколько лазеров, один или несколько LED (светодиодов), в частности, многоцветных LED, одну или несколько ламп накаливания. В простейшем случае, источник 610 света излучает непрерывный свет с постоянной длиной волны, соответственно, с постоянным спектром длин волны. Кроме того, позиционирующий вспомогательный блок 600 имеет блок 626 выдачи, посредством которого альтернативно или дополнительно могут выдаваться акустические сигналы.
Кроме того, позиционирующий вспомогательный блок 600 имеет РЧИ-транспондер 620, который может считываться и/или записываться с помощью считывающего и записывающего РЧИ-блока 121 блока сопряжения. В частности, РЧИ-транспондер 620 в соединении со считывающим и записывающим РЧИ-блоком 121 и управляющим блоком 46 служит для контроля и прерывания многократного применения позиционирующего вспомогательного блока 600 при нескольких операциях. Таким же образом, как стерильный блок 400 позиционирующий вспомогательный блок 600 имеет два противоположно расположенных фиксирующих и исполнительных элемента 622, 624, посредством которых может устанавливаться имеющее возможность разъема фиксирующее соединение между позиционирующим вспомогательным блоком 600 и стерильным шлюзом 200. Контроль правильного соединения позиционирующего вспомогательного блока 600 со стерильным шлюзом 200 и с блоком 100 сопряжения осуществляется посредством датчика 120 сопряжения таким же образом, как уже описано в сочетании со стерильным блоком 400.
Фиг.5 показывает позиционирующий вспомогательный блок 700 согласно второму варианту осуществления. Позиционирующий вспомогательный блок 700, таким же образом, как позиционирующий вспомогательный блок 600 вместо инструментального блока 300 выполнен с возможностью соединения посредством стерильного шлюза 200 с блоком 120 сопряжения. В отличие от позиционирующего вспомогательного блока 600 согласно фиг.4, позиционирующий вспомогательный блок 700 не имеет стерильных клапанов и тем самым не имеет никаких механизмов для приведения их в действие. Элементы позиционирующего вспомогательного блока 700, которые по конструкции и/или по функции совпадают с элементами позиционирующего вспомогательного блока 600, имеют такие же ссылочные позиции. Позиционирующий вспомогательный блок 700 имеет дополнительно источник 702 энергии в виде батареи и электронную схему 704, которая, в частности, может включать в себя контроллер для управления источника 610 света. Электронная схема 704 включает в себя блок 706 выдачи, посредством которого могут выдаваться оптические и/или акустические сигналы.
Источник 702 энергии обеспечивает электрической энергией как электронную схему 704, так и источник 610 света. Кроме того, беспроводная передача данных между электронной схемой 704 и управляющим блоком 46 манипулирующей руки 12 предусмотрена для передачи управляющей информации. В альтернативных вариантах осуществления, управляющая информация передается на электронную схему 704 посредством РЧИ-транспондера 620. Таким образом, никакого прямого контакта элементов позиционирующего вспомогательного блока 700 с нестерильными элементами, в частности, с передаточными элементами 102 блока 100 сопряжения не происходит, так что при соединении позиционирующего вспомогательного блока 700 никакой элемент позиционирующего вспомогательного блока 700 через нестерильные элементы блока 100 сопряжения не загрязняется, так что в этом варианте осуществления не требуются стерильные клапаны 602, 604 для обеспечения стерильного применения позиционирующего вспомогательного блока 700. В альтернативном варианте осуществления позиционирующего вспомогательного блока 600 согласно фиг.4 требуется стерильное перекрытие электрических контактов 616, 618 после отделения позиционирующего вспомогательного блока 600 от стерильного шлюза 200, поскольку электрические контакты 616, 618 были в контакте с нестерильными электрическим контактами 106, 108 блока 100 сопряжения и тем самым были загрязнены.
Дополнительная конструкция и функция корпуса 606 позиционирующего вспомогательного блока 600 и корпуса 706 позиционирующего вспомогательного блока 700 совпадают со стерильным блоком 400.
Средняя ось 614 светового пучка 612 позиционирующего вспомогательного блока 600, 700 в положении и ориентации совпадает со средней осью 510 инструментального хвостовика 512, если вместо инструментального блока 300 позиционирующий вспомогательный блок 600, соответственно, позиционирующий вспомогательный блок 700 соединен посредством стерильного шлюза 200 с блоком 100 сопряжения.
Фиг.6 показывает блок 100 сопряжения манипулирующей руки 16, стерильный шлюз 200, а также позиционирующий вспомогательный блок 600. Блок 100 сопряжения, стерильный шлюз 200, а также позиционирующий вспомогательный блок 600 показаны перед стыковкой стерильного шлюза 200 с блоком 100 сопряжения и перед последующей стыковкой позиционирующего вспомогательного блока 600 со стерильным шлюзом 200. Как уже пояснялось в связи с фиг.4 и 5, средняя ось 614 излученного позиционирующим вспомогательным блоком 600 светового пучка 612 совпадает по положению и ориентации с продольной осью 510 инструментального хвостовика 512, так что при проецировании светового пучка 612 на поверхность точка пересечения продольной оси 510 инструментального хвостовика 512 с проецирующей поверхностью может тут же графически отображаться. Положение и позиция продольной оси 510 инструментального хвостовика 512 хирургического инструмента 500 после замены соединенного с блоком 100 сопряжения посредством стерильного шлюза 200 позиционирующего вспомогательного блока 600 на инструментальный блок 300 совпадает со средней осью 614 светового пучка 612, если при этой замене положение и ориентация блока 100 сопряжения манипулирующей руки 16 остаются неизменными.
Фиг.7 показывает участок манипулирующей руки 16, к проксимальному концу которого через телескопическую систему 60 присоединен блок 100 сопряжения. Телескопическая система 60 имеет смещаемые друг относительно друга участки 62, 64, 66 и на фиг.7 представлена в выдвинутом состоянии. Участки 62, 64, 66 телескопической системы 60 могут вдвигаться и выдвигаться с помощью приводного блока 68, так что наконечник стержня 608 позиционирующего вспомогательного блока 600 может перемещаться вдоль продольной оси стержня 608, соответственно, вдоль средней оси 614 излученного позиционирующим вспомогательным блоком 600 светового пучка 612. Манипулирующая рука 16 имеет несколько перемещаемых друг относительно друга сегментов, позиция которых относительно друг друга может изменяться. Далее, телескопическая система 60 через сопрягающую передачу 59 соединена с возможностью поворота с другими сегментами манипулирующей руки 16, так что после замены позиционирующего вспомогательного блока 600 на инструментальный блок 300 положение и ориентация продольной оси 510 инструментального хвостовика 512 хирургического инструмента 500 может изменяться в своей позиции, то есть как в своей ориентации, так и в своем положении, посредством ввода данных управления на пульте 42 управления. Для настройки каждой манипулирующей руки 16 перед операцией блок 100 сопряжения должен ориентироваться таким образом, что продольная ось 510 инструментального хвостовика 512 соединенного с блоком 100 сопряжения хирургического инструмента 500 проходит через запланированное или имеющееся телесное отверстие 802 подлежащего оперированию пациента 18 и через заданную целевую операционную зону 30. На фиг.7 в месте 802 ввода в тело в тело пациента 18 введен троакар 800, через который затем для проведения хирургического вмешательства направляется передняя часть хвостовика 512 хирургического инструмента 500 вместе с концевым эффектором 514 до целевой операционной области 30. Излучаемый позиционирующим вспомогательным блоком 600 световой пучок 612 направляется при этом посредством манипулятора 12 автоматически или посредством обслуживающего персонала так, что его средняя ось 614 проходит через отверстие троакара 800. При этом, с помощью формирующего луч оптического элемента 611 вокруг средней оси 614 светового пучка 612 может формироваться вспомогательная картинка, как например, перекрестие нитей или несколько концентрических кругов, которая упрощает среднее ориентирование светового пучка 612 на желаемое или имеющееся место 802 ввода в тело. Кроме того, управляющий блок 46 манипулирующей руки и/или центральный управляющий блок 40 определяет величину промежуточного вектора между центральной осью 614 излученного светового пучка 612 до целевой операционной области 30, в частности, величину перпендикулярного промежуточного вектора от средней оси 614 до целевой операционной зоны 30. При этом, возможно определять как величину промежуточного вектора до края целевой операционной зоны 30, так и альтернативно или дополнительно величину промежуточного вектора до средней точки 31 целевой операционной зоны 30.
В данном примере осуществления средняя ось 614 проходит через среднюю точку 31 целевой операционной зоны 30, так что величина промежуточного вектора в данном примере осуществления между средней осью 614 и целевой операционной областью 30 равно нулю, поскольку средняя ось 614 проходит через целевую операционную зону 30. Также до средней точки 31 целевой операционной зоны 30 расстояние (промежуток) равняется нулю, поскольку средняя ось 614 проходит через среднюю точку 31 целевой операционной зоны 30. Если величина перпендикулярного промежуточного вектора пренижает первое значение, то обслуживающему персоналу может выдаваться первый оптический и/или акустический сигнал, а если величина промежуточного вектора достигнет второго значения или пренизит его, то может выдаваться второй оптический и/или акустический сигнал. Второе значение, в частности, может являться нулем, так что второй оптический и/или акустический сигнал выдается тогда, когда средняя ось 614 проходит через целевую операционную зону 30 или ее среднюю точку 31. Также выдаваемый оптический и/или акустический сигнал в зависимости от определенной величины промежуточного вектора может изменяться непрерывно с изменением расстояние или в несколько этапов, так что обслуживающий персонал акустически или оптически информируется, удаляется ли средняя ось 614 от целевой операционной зоны 30 или приближается к ней.
Фиг.8 показывает систему согласно фиг.7, причем участки 62-66 телескопической системы 60 - в отличие от фиг.7 - представлены во вдвинутом состоянии. Манипулирующая рука 16 при настройке позиционируется предпочтительно так, что наконечник стержня 608 позиционирующего вспомогательного блока 600 выступает во введенный в тело пациента 18 троакар 800, когда телескопическая система 60 вдвинута. При этом, манипулирующая рука 16 позиционируется так, что наконечник стержня 608 выступает в троакар 800 на длину в диапазоне от 0,5 см до 5 см, предпочтительно в диапазоне между 0,7 и 2 см, в частности, 1 см. Если затем телескопическая система 60 выдвигается, как это показано на фиг.7, то позиционирующий вспомогательный блок 600 посредством приведения в действие фиксирующих и исполнительных элементов 622, 624 может отделяться от стерильного шлюза 200 и выниматься из него, а вместо позиционирующего вспомогательного блока 600 стерильный блок 400 инструментального блока 300 вставляется в стерильный шлюз 200 и соединяется с ним. При этом, длина стержня 608 позиционирующего вспомогательного блока 600 и инструментального хвостовика 512 согласованы друг с другом таким образом, что концевой эффектор 514 хирургического инструмента 500 тогда расположен с предпочтительно малой длиной внутри троакара 800, как это показано на фиг.9. Длина, предпочтительно, имеет значение в диапазоне от 2 см до 6 см и составляет, в частности, 4 см. Затем, телескопическая система 60 может вдвигаться, так что концевой эффектор 514 хирургического инструмента 500 направляется через троакар 800 вплоть до целевой операционной зоны 30. Как показано на фиг.10, концевой эффектор 514 также может перемещаться сквозь целевую операционную зону 30 в направлении продольной оси 510 инструментального хвостовика 512 и за целевую операционную зону 30.
Фиг.11 показывает схематическое изображение позиционирующего вспомогательного блока 600 и целевой операционной зоны 30 в координатной системе X, Y, Z устройства, соответственно, манипулятора 12. Пространственная протяженность целевой операционной зоны 30 определялась с помощью подходящего визуализирующего способа для конкретного пациента 18 и при этом может быть задана посредством множества координат как простое геометрическое тело, например, посредством шара, или посредством конкретной пространственной протяженности определенной и/или заданной для специального хирургического вмешательства в пациента 18 целевой операционной зоны 30. Целевая операционная зона 30 может определяться для пациента 18, в частности, с помощью визуализирующего способа, соответственно, задаваться при оценке определенных изображений автоматически или обслуживающим персоналом. В качестве визуализирующего способа может использоваться метод рентгенологического исследования, метод компьютерной томографии, метод магниторезонансной томографии или другой подходящий метод. Наружные размеры целевой операционной зоны 30 в показанной на фиг.11 двухмерной координатной системе 26 заданы посредством координат xz1 и xz2 в Х-направлении, а также посредством координат yz1 и yz2 на Х-оси. Середина 31 определенной целевой операционной зоны 30 задана посредством координат xz2 на Х-оси и yz2 на Y-оси. Таким же образом известна, соответственно, задана пространственная протяженность целевой операционной области 30 на проходящей перпендикулярно плоскости изображения Z-оси. Координаты точки пересечения вектора V со средней осью 614 светового пучка 612 обозначены на фиг.11 как xm, ym, zm.
Средняя ось 614 излучаемого позиционирующим вспомогательным блоком 600 светового пучка 612 соединенного с блоком 100 сопряжения посредством стерильного шлюза 200 позиционирующего вспомогательного блока 600 совпадает в своем положении и ориентации с продольной осью 510 инструментального хвостовика 512 соединенного вместо позиционирующего вспомогательного блока 600 с блоком 100 сопряжения посредством стерильного шлюза 200 инструментального блока. Как уже пояснялось, манипулирующая рука 16 вместе с блоком 100 сопряжения должна позиционироваться перед хирургическим вмешательством в пациента 18 так, что излучаемый позиционирующим вспомогательным блоком 600 световой пучок 612 попадает на желательное телесное отверстие 802, а средняя ось 614 излучаемого светового пучка 612 проходит через целевую операционную зону 30. Чтобы, в частности, поддержать обслуживающий персонал при корректной ориентации манипулирующей руки 16 и блока 100 сопряжения, управляющий блок 46 определяет величину наикратчайшего до средней оси 614 трехмерного перпендикулярного промежуточного вектора V между средней осью 614 и средней точкой 31 целевой операционной зоны 30. Если величина промежуточного вектора V достигает или пренижает первое значение, то выдается первый оптический и/или акустический сигнал, если она достигает или пренижает второе значение, то выдается второй оптический и/или акустический сигнал, так что обслуживающему персоналу дается оптическая и/или акустическая информация о корректной ориентации блока 100 сопряжения. Вследствие этого, создана простая и комфортная возможность поддержать обслуживающий персонал при настройке манипулятора 12 и при позиционировании манипулирующих рук 16а-16d перед собственно хирургическим вмешательством.
Фиг.12 показывает схематичное изображение для ориентации соединенного с блоком 100 сопряжения позиционирующего вспомогательного блока 600 относительно целевой операционной зоны 30 согласно первому образу действий. В случае этого образа действия манипулирующая рука 16 вместе с блоком 100 сопряжения на первом этапе ориентируется таким образом, что средняя ось 614 излучаемого позиционирующим вспомогательным блоком 600 светового пучка 612 попадает на отверстие для ввода инструмента троакара 800. При такой ориентации величина промежуточного вектора V больше, чем предварительно настроенное значение, так что управляющий блок 46 формирует управляющую информацию, которая указывает, что средняя ось 614 не проходит через целевую операционную зону 30. Однако, величина промежуточного вектора V настолько велика, что она превышает первое предварительно настроенное значение, так что позиционирующий вспомогательный блок 600 излучает исключительно белый свет и/или не издает акустический сигнал. Если блок 100 сопряжения вместе с позиционирующим вспомогательным блоком 600 поворачивается из позиции Р1 в направлении стрелки А1 в позицию Р2, то величина промежуточного вектора V‘ между средней точкой 31 целевой операционной зоны 30 и средней осью 614‘ излучаемого позиционирующим вспомогательным блоком 600‘ светового пучка 612‘ является меньше, чем первое предварительно настроенное значение, так что позиционирующий вспомогательный блок 600 выдает первый акустический сигнал и/или излучает свет другого спектра и/или неполный спектр излученного до этого света, так что обслуживающий персонал по изменению цвета может просто регистрировать приближение средней оси 614‘ к целевой операционной зоне 30. Затем, блок 100 сопряжения вместе с позиционирующим вспомогательным блоком 600‘ поворачивается из позиции Р2 дальше в направлении стрелки А2 до тех пор, пока позиционирующий вспомогательный блок 602‘ не достигнет позиции Р3, величина промежуточного вектора V‘ дополнительно уменьшается до тех пор, пока она не достигнет, в частности, значения «ноль», так что достигается или пренижается второе предварительно настроенное значение величины промежуточного вектора V‘. Это в случае, если позиционирующий вспомогательный блок 600‘‘ выдает второй оптический и/или акустический сигнал, посредством которого обслуживающий персонал информируется о корректной ориентации центральной оси 614‘‘ относительно целевой операционной зоны 30. Второй оптический сигнал может иметь отличающийся относительно первого оптического сигнала спектр длин волн или отличающуюся длину волны, так что обслуживающий персонал посредством изменения цвета информируется о корректной ориентации манипулирующей руки 16.
Альтернативно или дополнительно второй оптический сигнал имеет отличную относительно первого оптического сигнала частоту мигания. Затем, обслуживающий персонал может отделять позиционирующий вспомогательный блок 600 от стерильного шлюза 200 и тем самым от блока 100 сопряжения, и вместо позиционирующего вспомогательного блока 600 соединять предусмотренный для этой манипулирующей руки 16 инструментальный блок 300 с блоком 100 сопряжения посредством стерильного шлюза 200.
При наличии двух граничных значений, с которыми соответственно сравнивается величина промежуточного вектора V, могут регистрироваться три состояния, так что обслуживающему персоналу уже при приближении к целевой операционной зоне 30 может выдаваться соответствующий оптический и/или акустический сигнал, а при корректной ориентации позиционирующего вспомогательного блока 600 на целевую операционную зону 30 может выдаваться другой оптический и/или акустический сигнал. При наличии только одного граничного значения, просто могут различаться два состояния, в частности, состояние, когда существует расстояние между целевой операционной зоной 30 и средней осью 614, т.е., что средняя ось 614 не проходит через целевую операционную зону 30, и состояние, когда средняя ось 614 проходит через целевую операционную зону 30.
Фиг.13 показывает схематичное изображение для ориентации соединенного с манипулирующей рукой 16 позиционирующего вспомогательного блока 600 относительно целевой операционной зоны 30 согласно второму образу действия, при котором в отличие от первого образа действия средняя ось 614 светового пучка 612 на первом этапе ориентируется таким образом, что она проходит через целевую операционную зону 30, и обслуживающему персоналу выдается соответствующий оптический и/или акустический сигнал. Ориентация средней оси 614 относительно целевой операционной зоны 30 может, при этом, осуществляться так, как пояснялось для этапа 2 первого образа действия в сочетании с фиг.12. Таким образом, обслуживающий персонал здесь также может оптически и/или акустически информироваться о расстоянии и/или приближении средней оси 614 до/к целевой операционной зоне 30. Если средняя ось 614 проходит через целевую операционную зону 30, как это показано для позиционирующего вспомогательного блока 600 на фиг.13, то он затем поворачивается в направлении стрелки А3 до тех пор, пока средняя ось 614‘ излучаемого позиционирующим вспомогательным блоком 600 светового пучка не попадет на инструментальное отверстие троакара 800.
Иначе, чем описано в сочетании с фиг.12 и 13, позиционирующий вспомогательный блок 600 может выдавать также только один оптический и/или акустический сигнал или, например, посредством серии импульсов акустического сигнала и/или оптического сигнала давать обслуживающему персоналу через широту импульса и/или длительность импульса информацию о том, насколько велика величина перпендикулярного промежуточного вектора V до целевой операционной зоны 30 и/или до средней точки 31 целевой операционной зоны 30.
Фиг.14 показывает фрагмент тела пациента 18 с четырьмя телесными отверстиями Т1-Т4, в которые соответственно введен троакар 800а-800d. Через введенный в место Т1 ввода троакар 800b вводится в тело пациента 18 соединенный с блоком 100b сопряжения манипулирующей руки 16b стержневой эндоскоп инструментального блока 300b. Через введенный на позиции Т2 в тело пациента 18 троакар 800а вводится в тело пациента 18 хирургический инструмент 500а соединенного с блоком 100а сопряжения манипулирующей руки 16а инструментального блока 300а. Через введенный на позиции Т3 троакар 800с вводится в тело пациента 18 хирургический инструмент 500с соединенного с блоком 100с сопряжения манипулирующей руки 16с инструментального блока 300с. Через введенный на позиции Т4 в тело пациента 18 троакар 800d вводится в тело пациента 18 хирургический инструмент 500d соединенного с блоком 100d сопряжения манипулирующей руки 16d инструментального блока 300d.
Фиг.15 показывает систему с проксимальным концом манипулирующей руки 16 с блоком 100 сопряжения и соединенным с блоком 100 сопряжения позиционирующим вспомогательным блоком 600 с вдвинутой телескопической системой 60 манипулирующей руки 16 согласно второму варианту осуществления. На фиг.16 показана система согласно фиг.15, причем держатель 17 троакара манипулирующей руки 16 соединен с введенным в пациента 18 троакаром 800. Система второго варианта осуществления согласно фиг.15 и 16 отличается от показанного на фиг.7-14 и поясненного первого варианта осуществления исключительно тем, что держатель 17 троакара жестко соединен с манипулирующей рукой 16. Держатель 17 троакара имеет соединительный элемент 19 для соединения держателя 17 троакара с троакаром 800. Позиционирование и ориентирование манипулирующей руки 16 с помощью позиционирующего вспомогательного блока 600 осуществляется таким же образом, как описано в связи с первым вариантом осуществления. Элементы с одинаковой функцией или одинаковой конструкцией имеют одни и те же ссылочные позиции.
После того, как ориентирование позиционирующего вспомогательного блока 600 осуществлено так, что наконечник стержня 608 позиционирующего вспомогательного блока 600 введен в троакар 800 на длину в диапазоне между 1 см и 6 см, в частности, с длиной между 2 см и 4 см, соединительный элемент 19 держателя 17 троакара автоматически предварительно позиционируется так, что троакар 800 может соединяться вращательно с соединительным элементом 19 держателя 17 троакара. Таким образом, не требуется отдельное ориентирование соединительного блока 16.
Фиг.17 показывает систему согласно фиг.16, причем при одинаковом ориентировании манипулирующей руки 16, блока 100 сопряжения и держателя 17 троакара с соединительным элементом 19, а также троакаром 800, вместо позиционирующего вспомогательного блока 600 инструментальный блок 300 соединен с блоком 100 сопряжения манипулирующей руки 16. Для замены позиционирующего вспомогательного блока 600 на инструментальный блок 300 телескопическая система 60 из показанной на фиг.15-17 вдвинутой позиции передвигается в свою показанную на фиг.9 выдвинутую позицию без изменения ориентации манипулирующей руки 16 блока 100 сопряжения, держателя 17 троакара с соединительным элементом 19, а также троакаром 800 относительно телескопической системы 60. После замены, хирургический инструмент 500 инструментального блока 300 расположен в показанной на фиг.9 позиции и может перемещаться посредством вдвигания и поворачивания телескопической системы 60 вдоль продольной оси 510 инструментального хвостовика 512 до тех пор, пока концевой эффектор 514 хирургического инструмента 500 не достигнет целевой операционной зоны 30 или не выступит в направлении продольной оси 510 хирургического инструмента 500 за целевую операционную зону 30, как это можно видеть на фиг.17.
Фиг.18 показывает систему с участком манипулирующей руки 16 с блоком 100 сопряжения и эндоскопом 900 согласно третьему варианту осуществления. Телескопическая система 60 манипулирующей руки 16 показана в выдвинутом состоянии. Далее, позиционирующий вспомогательный блок 600 соединен с блоком 100 сопряжения. Элементы с тем же самым строением или теми же самыми функциями имеют одинаковые ссылочные позиции.
Эндоскоп 900 представляет собой стрежневой эндоскоп. По меньшей мере, часть отображающей оптики стрежневого эндоскопа 900 находится в стержне 912, проксимальный конец которого через троакар 810 через второе телесное отверстие 812 введен в тело пациента 18. С помощью стержневого эндоскопа 900 получаются изображения, по меньшей мере, части целевой операционной зоны 30. Стержневой эндоскоп 900 имеет головную часть 910, посредством которой стержневой эндоскоп 900 соединен с пультом 42 управления и/или блоком 44 индикации системы 10 для роботизированной хирургии. За счет этого обслуживающему персоналу, в частности, хирургу, полученное с помощью эндоскопа 900 изображение может показываться на пульте 42 управления, соответственно, блоке 44 индикации.
Посредством головной части 910 стержневой эндоскоп 900 также может быть сопряжен (соединен) с другим блоком 100 сопряжения, в частности, другой манипулирующей руки 16. Посредством штриховых линий схематично представлены наружные отображающие линии траектории 914 лучей отображающей оптики стержневого эндоскопа 900. Оптическая ось отображающей оптики стержневого эндоскопа 900, то есть оптическая ось стрежневого эндоскопа 900, лежит в середине траектории 914 лучей. Фокальная точка отображающей оптики стрежневого эндоскопа 900 обозначена ссылочной позиций 916.
В настоящем примере осуществления определяют перпендикулярный промежуточный вектор V между средней осью 614 траектории 612 лучей испускаемого позиционирующим вспомогательным блоком 600 света и фокальной точкой 916 отображающей оптики стержневого эндоскопа 900. Таким образом, фокальная точка 916 служит в качестве целевой точки. Определенный перпендикулярный промежуточный вектор V указывает актуальное расстояние (промежуток) от средней оси 614 траектории 612 лучей до фокальной точки 916. При этом, оценка позиции и ориентации манипулирующей руки 16 с помощью позиционирующего вспомогательного блока 600 осуществляется таким же образом, как это уже пояснялось в связи с обоими первыми вариантами осуществления во взаимосвязи с фиг. 4-17. Кроме того, позиция соединенного с блоком 100 сопряжения позиционирующего вспомогательного блока 600 вместе с по меньшей мере частью сегментов манипулирующей руки 16 изменяется так, что средняя ось 614 пучков 612 лучей приближается к служащей в качестве целевой точки фокальной точке 916 до предварительно настроенного первого и/или второго значения промежутка, или - как показано на фиг.19 - средняя ось 614 проходит через фокальную точку 916. Кроме того, на фиг.19 телескопическая система 60 манипулирующей руки повернута относительно показанной на фиг.18 позиции с помощью сопрягающей передачи 59 и/или посредством других сегментов манипулирующей руки 16.
На фиг.20 показана система согласно фиг.19, причем позиционирующий вспомогательный блок 600 заменен инструментальным блоком 300 с хирургическим инструментом 500 без изменения позиции блока 100 сопряжения манипулирующей руки 16. При этом телескопическая система 60 находится в выдвинутом состоянии. При этом расстояние между позиционирующим вспомогательным блоком 600 и троакаром 800, как описано в связи с обоими первыми примерам осуществления, предварительно было настроено так, что после замены позиционирующего вспомогательного блока 600 на инструментальный блок 300 проксимальный конец инструментального хвостовика 512 хирургического инструмента 500 инструментального блока 300 введен в инструментальное отверстие троакара 800. Предпочтительно конец инструментального хвостовика 512 со своим концевым эффектором 514 с длиной в диапазоне от 2 до 6 см, в частности, на 4 см, выступает в инструментальное отверстие троакара 800, так что концевой эффектор 514 предпочтительным образом находится в инструментальном отверстии троакара 800, как это показано на фиг.20.
На фиг.21 показана система согласно фиг.20 с вдвинутой телескопической системой 60. Посредством вдвигания телескопической системы 60 концевой эффектор 514 перемещен до видимой области стрежневого эндоскопа 900 и до целевой операционной зоны 30, и там может эксплуатироваться и позиционироваться под визуальным контролем. Таким образом, посредством описанного образа действий является возможным позицию, то есть ориентацию и положение, подлежащего использованию хирургического инструмента 500 уже предварительно настраивать так, что он направляется к целевой операционной зоне 30 и там надежно достигает обозреваемой области (field of view) стержневого эндоскопа 900. Целевая точка или целевая зона могут быть определены посредством координат xz, yz, zz координатной системы X, Y, Z устройства или посредством координат x’z, y’z, z’z координатной системы X’, Y’, Z’ пациента и в случае необходимости могут пересчитываться в координаты соответствующей другой координатной системы.
Также в случае первого и в случае второго варианта осуществления согласно фиг.4-17 вместо целевой операционной зоны 30 может быть определена целевая точка, как например, средняя точка 31 определенной целевой операционной зоны 30 или зависящая от положения другого хирургического инструмента 900 целевая точка. Также вместо эндоскопа 900 в случае третьего варианта осуществления может использоваться другая визуализирующая система для регистрации изображений, по меньшей мере, одного участка целевой операционной зоны 30. В таком случае целевая зона зависит от положения указанной другой визуализирующей системы. Целевая точка представляет собой, в частности, точку в диапазоне глубины резкости отображающей оптики эндоскопа, соответственно, визуализирующей системы, как например, фокальную точку отображающей оптики или точку между фокальной точкой и проксимальным концом эндоскопа 900. Альтернативно или дополнительно, целевая зона может быть определена посредством расстояния вокруг некоторой точки.
Указанный образ действий для позиционирования манипулирующей руки 16 описывался в случае указанных трех вариантов осуществления в сочетании с позиционирующим вспомогательным блоком 600. Вместо позиционирующего вспомогательного блока 600 может также использоваться позиционирующий вспомогательный блок 700, причем позиционирование манипулирующей руки 16 и блока 100 сопряжения осуществляется таким же образом, как описано в сочетании с позиционирующим вспомогательным блоком 600.
Список ссылочных позиций
10 система
12 манипулятор
14 штатив
16, 16а - 16d манипулирующая рука
17 держатель троакара
18 пациент
19 соединительный элемент
20 головка штатива
24 опора штатива
28 консоль штатива
30 целевая операционная зона
31 средняя точка целевой операционной зоны
32 стойка операционного стола
34 операционный стол
36 управляющий блок операционного стола
38 поверхности для опирания пациента
40 центральный управляющий блок устройства
41 блок выдачи
42 пуль управления
44 блок индикации
46 управляющий блок манипулятора
47 блок выдачи
59 сопрягающая передача
60 телескопическая система
62, 64, 66 участки телескопической системы
68 приводной блок
100, 100а - 100d блок сопряжения
102 первое передаточное средство
104 электрический передаточный элемент
106, 108 электрический контакт
109 оптический передаточный элемент
110 первый поступательный приводной элемент
112 второй поступательный приводной элемент
114 первый вращательный приводной элемент
116 второй вращательный приводной элемент
120 датчик сопряжения
121 считывающий и записывающий РЧИ-блок
122, 124 направляющий паз
123, 125 передний конец направляющего паза
126 фиксирующий носик
128 фиксирующий элемент
134 деблокирующая кнопка
200 стерильный шлюз
201 стерильная пленка
202 присоединительный край
204, 206 направляющий штифт
208, 210 клапан шлюза
300, 300а - 300d инструментальный блок
400, 400а - 400d стерильный блок
438, 440 фиксирующий и исполнительный элемент
494 РЧИ-транспондер
500, 500а-500d хирургический инструмент
510 продольная ось
512 инструментальный хвостовик
514 концевой эффектор
600, 700 позиционирующий вспомогательный блок
602, 604 стерильный клапан
606 корпус
608 стержень
610 источник света
611 формирующий луч оптический элемент
612 световой пучок
614 средняя ось
616, 618 электрический контакт
620 РЧИ-транспондер
622, 624 фиксирующий и исполнительный элемент
626 блок выдачи
702 источник энергии
704 электронная схема
706 блок выдачи
800 троакар
802 телесное отверстие
810 троакар
812 телесное отверстие
900 стержневой эндоскоп
910 головная часть
912 стержень
914 траектория лучей
916 фокальная точка
А1 - А3 направление движения
Р1 - Р3 позиция
Т1 - Т4 запланированное телесное отверстие
V, V‘ промежуточный вектор
xz, yz, zz координаты целевой зоны в координатной системе устройства
X, Y, Z координатная система устройства
X’, Y’, Z’ координатная система пациента
Реферат
Группа изобретений относится к медицине, а именно к способу для позиционирования манипулирующей руки в координатной системе (X, Y, Z) устройства для роботизированной хирургии. При этом определяют координаты (x, y, z) целевой зоны пациента. Для позиционирования манипулирующей руки позиционирующий вспомогательный блок вместо инструментального блока соединяют с блоком сопряжения манипулирующей руки. Свет с помощью позиционирующего вспомогательного блока излучают в виде светового пучка, положение средней оси которого совпадает с положением продольной оси хирургического инструмента, соединенного вместо позиционирующего вспомогательного блока с блоком сопряжения инструментального бока. При соединении позиционирующего вспомогательного блока с блоком сопряжения с помощью управляющего блока определяют перпендикулярный к средней оси промежуточный вектор между средней осью и заданной посредством координат (x, y, z) целевой зоной. С помощью блока выдачи выдают первый оптический и/или акустический сигнал, когда величина промежуточного вектора имеет предварительно настроенное значение и/или принижает его. Позиционирующий вспомогательный блок для поддержки при позиционировании манипулирующей руки в координатной системе (X, Y, Z) устройства для роботизированной хирургии вместо инструментального блока может соединяться с блоком сопряжения манипулирующей руки, с источником света и с электронной схемой с переходным устройством к управляющему блоку устройства для приема управляющей информации, которая указывает, что величина промежуточного вектора имеет предварительно настроенное значение или принижает его. Достигается упрощение ориентации хирургических инструментов относительно предусмотренной целевой зоны, а также поддержка манипулирующей руки устройства при помощи вспомогательного позиционирующего блока. 3 н. и 17 з.п. ф-лы, 21 ил.
Формула
Документы, цитированные в отчёте о поиске
Медицинская роботизированная система
Комментарии