Приводные механизмы авторегулировки для модульных хирургических инструментов - RU2670669C9
Код документа: RU2670669C9
Чертежи
































































































































































Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к хирургическим инструментам и, в различных вариантах осуществления, к хирургическим режущим и сшивающим скобами инструментам и используемым в них кассетам со скобами, которые выполнены с возможностью разрезания и сшивания ткани скобами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Особенности и преимущества настоящего изобретения, а также способ их достижения станут более очевидны, а само изобретение станет более понятным после ознакомления со следующим описанием вариантов осуществления настоящего изобретения в совокупности с сопроводительными чертежами, на которых:
на ФИГ. 1 представлен вид в перспективе хирургического инструмента, содержащего рукоятку, стержень и шарнирно поворачиваемый концевой эффектор;
на ФИГ. 2 представлен вид в вертикальной проекции хирургического инструмента, изображенного на ФИГ. 1;
на ФИГ. 3 представлен вид в горизонтальной проекции хирургического инструмента, изображенного на ФИГ. 1;
на ФИГ. 4 представлен вид в сечении концевого эффектора и стержня хирургического инструмента, изображенного на ФИГ. 1;
на ФИГ. 5 представлен подробный вид шарнирного сочленения, которое поворотно соединяет стержень и концевой эффектор, изображенный на ФИГ. 1, на котором концевой эффектор показан в нейтральном, или центральном, положении;
на ФИГ. 6 представлен вид в сечении устройства управления шарнирным сочленением хирургического инструмента, изображенного на ФИГ. 1, в нейтральном, или центральном, положении;
на ФИГ. 7 представлен вид с пространственным разделением компонентов концевого эффектора, удлиненного стержня и шарнирного сочленения хирургического инструмента, изображенного на ФИГ. 1;
на ФИГ. 8 представлен вид в сечении концевого эффектора, удлиненного стержня и шарнирного сочленения хирургического инструмента, изображенного на ФИГ. 1;
на ФИГ. 9 представлен вид в перспективе концевого эффектора, удлиненного стержня и шарнирного сочленения хирургического инструмента, изображенного на ФИГ. 1;
на ФИГ. 10 показан концевой эффектор хирургического инструмента, изображенного на ФИГ. 1, шарнирно повернутый вокруг шарнирного сочленения;
на ФИГ. 11 представлен вид в сечении устройства управления шарнирным сочленением, изображенного на ФИГ. 6, которое активировано для перемещения концевого эффектора, как показано на ФИГ. 12;
на ФИГ. 12 представлен вид в перспективе хирургического инструмента, содержащего рукоятку, стержень и шарнирно поворачиваемый концевой эффектор;
на ФИГ. 13 представлен вид сбоку хирургического инструмента, изображенного на ФИГ. 12;
на ФИГ. 14 представлен вид в перспективе пускового элемента и ведущей шестерни, расположенных внутри рукоятки, изображенной на ФИГ. 12;
на ФИГ. 15 представлен вид в перспективе пускового элемента и ведущей шестерни, изображенных на ФИГ. 14, а также узла зубчатого редуктора, функционально зацепленного с ведущей шестерней;
на ФИГ. 16 представлен вид в перспективе рукоятки, изображенной на ФИГ. 12, с удаленными с нее частями для иллюстрации пускового элемента и ведущей шестерни, изображенных на ФИГ. 14, узла зубчатого редуктора, изображенного на ФИГ. 15, и электрического двигателя, выполненного с возможностью привода пускового элемента дистально и/или проксимально в зависимости от направления вращения электрического двигателя;
на ФИГ. 17 представлен вид в перспективе хирургического инструмента, содержащего рукоятку, стержень, концевой эффектор и шарнирное сочленение, которое соединяет концевой эффектор со стержнем, причем на изображении части рукоятки удалены для целей иллюстрации;
на ФИГ. 18 представлен вид в сечении хирургического инструмента, изображенного на ФИГ. 17;
на ФИГ. 19 представлен вид с пространственным разделением компонентов хирургического инструмента, изображенного на ФИГ. 17;
на ФИГ. 20 представлен подробный вид в сечении хирургического инструмента, изображенного на ФИГ. 17, причем на изображении концевой эффектор находится в открытой конфигурации, шарнирное сочленение находится в незаблокированной конфигурации, а исполнительный механизм блокировки шарнира в рукоятке хирургического инструмента показан в незаблокированной конфигурации;
на ФИГ. 21 представлен подробный вид в сечении хирургического инструмента, изображенного на ФИГ. 17, на котором концевой эффектор находится в шарнирно повернутой открытой конфигурации, шарнирное сочленение находится в незаблокированной конфигурации, а шкив шарнира зацеплен с пусковым элементом хирургического инструмента, изображенного на ФИГ. 17, причем перемещение пускового элемента может подталкивать шкив шарнира и шарнирно поворачивать концевой эффектор;
на ФИГ. 22 представлен подробный вид в сечении хирургического инструмента, изображенного на ФИГ. 17, на котором концевой эффектор показан в закрытой конфигурации, шарнирное сочленение показано в незаблокированной конфигурации, а закрывающий привод концевого эффектора активируют для закрытия концевого эффектора и перемещения исполнительного механизма блокировки шарнира в заблокированную конфигурацию;
на ФИГ. 22A представлен подробный вид в сечении рукоятки хирургического инструмента, изображенного на ФИГ. 17, на котором показана конфигурация, описанная в отношении ФИГ. 22;
на ФИГ. 23 представлен подробный вид в сечении хирургического инструмента, изображенного на ФИГ. 17, на котором показаны концевой эффектор в закрытой конфигурации и шарнирное сочленение в заблокированной конфигурации, причем активированный закрывающий привод предотвращает переход исполнительного механизма блокировки шарнира в его незаблокированную конфигурацию, показанную на ФИГ. 20-22;
на ФИГ. 24A представлен вид в горизонтальной проекции шарнирного сочленения хирургического инструмента, изображенного на ФИГ. 17, который показан в заблокированной конфигурации;
на ФИГ. 24B представлен вид в горизонтальной проекции шарнирного сочленения хирургического инструмента, изображенного на ФИГ. 17, который показан в незаблокированной конфигурации;
на ФИГ. 25 представлен подробный вид в сечении рукоятки хирургического инструмента, изображенной на ФИГ. 17, на котором показан шкив шарнира, отсоединенный от пускового элемента закрывающим приводом;
на ФИГ. 26 представлен подробный вид в сечении хирургического инструмента, изображенного на ФИГ. 17, на котором показан пусковой элемент по меньшей мере в частично активированном положении и шкив шарнира, отсоединенный от пускового элемента закрывающим приводом;
на ФИГ. 27 представлен подробный вид в сечении хирургического инструмента, изображенного на ФИГ. 17, на котором показан концевой эффектор в закрытой конфигурации, шарнирное сочленение и исполнительный механизм шарнирного сочленения в заблокированной конфигурации и пусковой элемент в оттянутом положении;
на ФИГ. 28 представлен подробный вид в сечении хирургического инструмента, изображенного на ФИГ. 17, на котором показан концевой эффектор в открытой конфигурации, закрывающий привод концевого эффектора в оттянутом положении и шарнирное сочленение в заблокированной конфигурации;
на ФИГ. 29 представлен подробный вид в сечении хирургического инструмента, изображенного на ФИГ. 17, на котором концевой эффектор показан в открытой конфигурации, шарнирное сочленение и исполнительный механизм шарнирного сочленения показаны в незаблокированной конфигурации, причем шкив шарнира может быть повторно соединен с пусковым приводом и использован для шарнирного поворота концевого эффектора еще раз;
на ФИГ. 30 представлен вид с пространственным разделением компонентов стержня и концевого эффектора хирургического инструмента, включая альтернативную конфигурацию блокировки шарнира;
на ФИГ. 31 представлен вид в сечении в вертикальной проекции концевого эффектора и стержня хирургического инструмента, изображенного на ФИГ. 30, на котором показан концевой эффектор в незаблокированной конфигурации;
на ФИГ. 32 представлен вид в сечении в вертикальной проекции концевого эффектора и стержня хирургического инструмента, изображенного на ФИГ. 30, на котором показан концевой эффектор в заблокированной конфигурации;
на ФИГ. 33 представлен общий вид одной формы хирургической системы, включающей хирургический инструмент и множество сменных узлов стержня;
на ФИГ. 34 представлен вид в перспективе рукоятки хирургического инструмента, соединенной со сменным узлом стержня;
на ФИГ. 35 представлен вид в перспективе с пространственным разделением компонентов рукоятки хирургического инструмента, изображенной на ФИГ. 34;
на ФИГ. 36 представлен вид сбоку в вертикальной проекции рукоятки, изображенной на ФИГ. 35, причем часть кожуха рукоятки на фигуре удалена;
на ФИГ. 37 представлен вид в перспективе с пространственным разделением компонентов сменного узла стержня;
на ФИГ. 38 представлен общий вид сбоку в вертикальной проекции части рукоятки и сменного узла стержня, изображенного на ФИГ. 34, на котором показано вертикальное совмещение этих компонентов до соединения вместе, причем их части опущены для ясности;
на ФИГ. 39 представлен вид в перспективе части сменного узла стержня до прикрепления хирургического инструмента к рукоятке;
на ФИГ. 40 представлен вид сбоку части сменного узла стержня, соединенного с рукояткой с помощью вилки блокировки, в заблокированном или зацепленном положении с частью модуля крепления рамы рукоятки;
на ФИГ. 41 представлен другой вид сбоку сменного узла стержня и рукоятки, изображенных на ФИГ. 40, причем вилка блокировки находится в расцепленном или незаблокированном положении;
на ФИГ. 42 представлен вид сверху части сменного узла стержня и рукоятки до соединения вместе;
на ФИГ. 43 представлен другой вид сверху части сменного узла стержня и рукоятки, изображенных на ФИГ. 42, соединенных вместе;
на ФИГ. 44 представлен вид сбоку в вертикальной проекции сменного узла стержня, совмещенного с рукояткой хирургического инструмента, до соединения вместе;
на ФИГ. 45 представлен вид спереди в перспективе сменного узла стержня и рукоятки хирургического инструмента, изображенных на ФИГ. 44, причем их части удалены для ясности;
на ФИГ. 46 представлен вид сбоку части сменного узла стержня, совмещенного с частью рукоятки хирургического инструмента до соединения вместе, причем их части опущены для ясности;
на ФИГ. 47 представлен другой вид сбоку в вертикальной проекции сменного узла стержня и рукоятки, изображенных на ФИГ. 46, причем узел стержня находится в частичном соединительном зацеплении с рукояткой;
на ФИГ. 48 представлен другой вид сбоку в вертикальной проекции сменного узла стержня и рукоятки, изображенных на ФИГ. 46 и 47, после соединения вместе;
на ФИГ. 49 представлен другой вид сбоку в вертикальной проекции части сменного узла стержня, совмещенной с частью рукоятки, до начала процесса соединения;
на ФИГ. 50 представлен вид сверху части другого сменного узла стержня и части хирургического инструмента с другой конфигурацией рамы;
на ФИГ. 51 представлен другой вид сверху сменного узла стержня и части рамы, изображенных на ФИГ. 50, после соединения вместе;
на ФИГ. 52 представлен вид в перспективе с пространственным разделением компонентов сменного узла стержня и части рамы, изображенных на ФИГ. 50;
на ФИГ. 53 представлен другой вид в перспективе с пространственным разделением компонентов сменного узла стержня и части рамы, изображенных на ФИГ. 52, причем модуль крепления стержня узла стержня совмещен с модулем крепления части рамы к раме до соединения;
на ФИГ. 54 представлен вид сбоку в вертикальной проекции сменного узла стержня и части рамы, изображенных на ФИГ. 52;
на ФИГ. 55 представлен вид в перспективе сменного узла стержня и части рамы, изображенных на ФИГ. 53 и 54, после соединения вместе;
на ФИГ. 56 представлен вид сбоку в вертикальной проекции сменного узла стержня и части рамы, изображенных на ФИГ. 55;
на ФИГ. 57 представлен другой вид в перспективе сменного узла стержня и части рамы, изображенных на ФИГ. 55 и 56, причем их части опущены для ясности;
на ФИГ. 58 представлен вид сверху части другого сменного узла стержня и части рамы хирургического инструмента до соединения вместе;
на ФИГ. 59 представлен другой вид сверху сменного узла стержня и части рамы, изображенных на ФИГ. 58, после соединения вместе;
на ФИГ. 60 представлен вид в перспективе сменного узла стержня и рамы, изображенных на ФИГ. 58 и 59, до соединения вместе;
на ФИГ. 61 представлен другой вид в перспективе сменного узла стержня и части рамы, изображенных на ФИГ. 58-60, после соединения вместе;
на ФИГ. 62 представлен другой вид в перспективе сменного узла стержня и части рамы, изображенных на ФИГ. 58-60, после соединения вместе, причем части узла стержня показаны в сечении;
на ФИГ. 63 представлен общий вид в перспективе с пространственным разделением компонентов другого узла стержня концевого эффектора и части рамы хирургического инструмента;
на ФИГ. 64 представлен общий вид сверху с пространственным разделением компонентов узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 63;
на ФИГ. 65 представлен другой общий вид в перспективе с пространственным разделением компонентов узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 63 и 64;
на ФИГ. 66 представлен вид в перспективе узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 63-65, после соединения вместе;
на ФИГ. 67 представлен вид сбоку в вертикальной проекции узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 66, причем их части опущены для ясности;
на ФИГ. 68 представлен общий вид сверху с пространственным разделением компонентов другого узла стержня концевого эффектора и части рамы другого хирургического инструмента;
на ФИГ. 69 представлен общий вид в перспективе с пространственным разделением компонентов узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 68;
на ФИГ. 70 представлен другой общий вид в перспективе узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 68 и 69, причем узел стержня концевого эффектора показан до защелкивания в соединительном зацеплении с частью рамы;
на ФИГ. 71 представлен вид сверху узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 70;
на ФИГ. 72 представлен вид сверху узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 68-71, после соединения вместе;
на ФИГ. 73 представлен вид сбоку в вертикальной проекции узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 72;
на ФИГ. 74 представлен вид в перспективе узла стержня концевого эффектора и части рамы, изображенных на ФИГ. 72 и 73;
на ФИГ. 75 представлен общий вид с пространственным разделением компонентов сменного узла стержня и соответствующей рукоятки, причем их некоторые компоненты показаны в сечении;
на ФИГ. 76 представлен вид в перспективе и частичном сечении частей узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 75;
на ФИГ. 77 представлен частичный вид в перспективе узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 75 и 76, соединенных вместе, причем различные компоненты опущены для ясности;
на ФИГ. 78 представлен вид сбоку в вертикальной проекции узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 77;
на ФИГ. 79 представлен вид сбоку в вертикальной проекции узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 75-78, соединенных вместе, причем закрывающий привод находится в неактивированном положении, а некоторые компоненты показаны в сечении;
на ФИГ. 80 представлен другой вид сбоку в вертикальной проекции узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 79, причем закрывающий привод находится в полностью активированном положении;
на ФИГ. 81 представлен общий вид с пространственным разделением компонентов сменного узла стержня и соответствующей рукоятки, причем их некоторые компоненты опущены для ясности и причем система закрывающего привода находится в заблокированной ориентации;
на ФИГ. 82 представлен вид сбоку узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 81, соединенных вместе, причем различные компоненты опущены для ясности и причем система закрывающего привода находится в незаблокированном и неактивированном положении;
на ФИГ. 83 представлен вид сбоку узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 82, причем различные компоненты показаны в сечении для ясности;
на ФИГ. 84 представлен вид сбоку узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 81-83, соединенных вместе, причем различные компоненты опущены для ясности и причем система закрывающего привода находится в активированном положении;
на ФИГ. 85 представлен вид сбоку узла стержня концевого эффектора и рукоятки, изображенных на ФИГ. 84, причем различные компоненты показаны в сечении для ясности;
на ФИГ. 86 представлен общий вид в перспективе с пространственным разделением компонентов части сменного узла стержня, а также части рукоятки хирургического инструмента;
на ФИГ. 87 представлен вид сбоку в вертикальной проекции частей сменного узла стержня и рукоятки, изображенных на ФИГ. 86;
на ФИГ. 88 представлен другой общий вид в перспективе с пространственным разделением компонентов частей сменного узла стержня и рукоятки, изображенных на ФИГ. 86 и 87, причем части сменного узла стержня показаны в сечении для ясности;
на ФИГ. 89 представлен другой вид сбоку в вертикальной проекции частей сменного узла стержня и рукоятки, изображенных на ФИГ. 86-88, причем их части показаны в сечении для ясности;
на ФИГ. 90 представлен вид сбоку в вертикальной проекции частей сменного узла стержня и рукоятки, изображенных на ФИГ. 86-89, после того как сменный узел стержня был функционально соединен с рукояткой, причем их части показаны в сечении для ясности;
на ФИГ. 91 представлен другой вид сбоку в вертикальной проекции частей сменного узла стержня и соединенной с ним рукоятки, причем система закрывающего привода находится в полностью активированном положении;
на ФИГ. 92 представлен общий вид в перспективе с пространственным разделением компонентов части другого сменного узла стержня и части рукоятки другого хирургического инструмента;
на ФИГ. 93 представлен вид сбоку в вертикальной проекции частей сменного узла стержня и рукоятки, изображенных на ФИГ. 92, которые совмещены до соединения вместе;
на ФИГ. 94 представлен другой вид в перспективе с пространственным разделением компонентов сменного узла стержня и рукоятки, изображенных на ФИГ. 92 и 93, причем некоторые их части показаны в сечении;
на ФИГ. 95 представлен другой вид в перспективе сменного узла стержня и рукоятки, изображенных на ФИГ. 92-94, соединенных вместе с помощью функционального зацепления;
на ФИГ. 96 представлен вид сбоку в вертикальной проекции сменного узла стержня и рукоятки, изображенных на ФИГ. 95;
на ФИГ. 97 представлен другой вид сбоку в вертикальной проекции сменного узла стержня и рукоятки, изображенных на ФИГ. 96, причем некоторые их части показаны в сечении;
на ФИГ. 98 представлен другой вид сбоку в вертикальной проекции сменного узла стержня и рукоятки, изображенных на ФИГ. 92-96, причем закрывающий спусковой механизм находится в полностью активированном положении;
на ФИГ. 99 представлен вид в перспективе части другого сменного узла стержня, который включает в себя механизм блокирующего узла стержня;
на ФИГ. 100 представлен вид в перспективе механизма блокирующего узла стержня, изображенного на ФИГ. 99, в заблокированном положении с промежуточной частью пускового стержня пускового элемента сменного узла стержня;
на ФИГ. 101 представлен другой вид в перспективе блокирующего узла стержня и промежуточной части пускового элемента, причем блокирующий узел стержня находится в незаблокированном положении;
на ФИГ. 102 представлена схема, на которой показаны, во-первых, узел сцепления для функционального соединения привода шарнира с пусковым приводом хирургического инструмента и, во-вторых, блокировка шарнира, выполненная с возможностью разъемно удерживать привод шарнира и концевой эффектор хирургического инструмента в положении, причем на ФИГ. 102 узел сцепления показан в зацепленном положении, а блокировка шарнира - в заблокированном состоянии;
на ФИГ. 103 представлена схема, на которой показан узел сцепления, изображенный на ФИГ. 102, в его зацепленном положении, а блокировка шарнира, изображенная на ФИГ. 102, - в первом незаблокированном состоянии, что позволяет шарнирно поворачивать концевой эффектор, изображенный на ФИГ. 102, в первом направлении;
на ФИГ. 104 представлена схема, на которой показан узел сцепления, изображенный на ФИГ. 102, в его зацепленном положении, а блокировка шарнира, изображенная на ФИГ. 102, - во втором незаблокированном состоянии, что позволяет шарнирно поворачивать концевой эффектор, изображенный на ФИГ. 102, во втором направлении;
на ФИГ. 104A представлен вид с пространственным разделением компонентов узла сцепления и блокировки шарнира, изображенных на ФИГ. 102;
на ФИГ. 105 представлен частичный вид в перспективе узла стержня, включая узел сцепления, изображенный на ФИГ. 102, в его зацепленном положении с частями узла стержня, удаленными для целей иллюстрации;
на ФИГ. 106 представлен частичный вид сверху в горизонтальной проекции узла стержня, изображенного на ФИГ. 105, на котором показан узел сцепления, изображенный на ФИГ. 102, в его зацепленном положении;
на ФИГ. 107 представлен частичный вид снизу в горизонтальной проекции узла стержня, изображенного на ФИГ. 105, на котором показан узел сцепления, изображенный на ФИГ. 102, в его зацепленном положении;
на ФИГ. 108 представлен частичный вид в перспективе узла стержня, изображенного на ФИГ. 105, на котором показан узел сцепления, изображенный на ФИГ. 102, в его зацепленном положении, причем дополнительные части удалены для целей иллюстрации;
на ФИГ. 109 представлен частичный вид в перспективе узла стержня, изображенного на ФИГ. 105, на котором показан узел сцепления, изображенный на ФИГ. 102, в расцепленном положении, причем дополнительные части удалены для целей иллюстрации;
на ФИГ. 110 представлен частичный вид в перспективе узла стержня, изображенного на ФИГ. 105, на котором показан узел сцепления, изображенный на ФИГ. 102, перемещенный в расцепленное положение с помощью закрывающего привода узла стержня;
на ФИГ. 111 представлен частичный вид в горизонтальной проекции узла стержня, изображенного на ФИГ. 105, на котором показан узел сцепления, изображенный на ФИГ. 102, в его зацепленном положении, причем дополнительные части удалены для целей иллюстрации;
на ФИГ. 112 представлен частичный вид в горизонтальной проекции узла стержня, изображенного на ФИГ. 105, на котором показан узел сцепления, изображенный на ФИГ. 102, в расцепленном положении, причем дополнительные части удалены для целей иллюстрации;
на ФИГ. 113 представлен вид в горизонтальной проекции альтернативного варианта осуществления блокировки шарнира, показанной в заблокированном состоянии;
на ФИГ. 114 представлен вид с пространственным разделением компонентов блокировки шарнира, изображенной на ФИГ. 113;
на ФИГ. 115 представлен вид в сечении другого альтернативного варианта осуществления блокировки шарнира, показанной в заблокированном состоянии;
на ФИГ. 116 представлен вид с пространственным разделением компонентов блокировки шарнира, изображенной на ФИГ. 114;
на ФИГ. 117 представлен вид в перспективе другого альтернативного варианта осуществления блокировки шарнира, показанной в заблокированном состоянии;
на ФИГ. 118 представлен вид с пространственным разделением компонентов блокировки шарнира, изображенной на ФИГ. 117;
на ФИГ. 119 представлен вид в вертикальной проекции блокировки шарнира, изображенной на ФИГ. 117, на котором блокировка шарнира показана в заблокированном состоянии;
на ФИГ. 120 представлен вид в вертикальной проекции блокировки шарнира, изображенной на ФИГ. 117, на котором блокировка шарнира показана в первом незаблокированном состоянии для шарнирного поворота концевого эффектора в первом направлении;
на ФИГ. 121 представлен вид в вертикальной проекции блокировки шарнира, изображенной на ФИГ. 117, на котором блокировка шарнира показана во втором незаблокированном состоянии для шарнирного поворота концевого эффектора во втором направлении;
на ФИГ. 122 представлен другой вид с пространственным разделением компонентов блокировки шарнира, изображенной на ФИГ. 117;
на ФИГ. 123 представлен вид в перспективе первого блокирующего кулачка блокировки шарнира, изображенной на ФИГ. 117;
на ФИГ. 124 представлен вид в перспективе второго блокирующего кулачка блокировки шарнира, изображенной на ФИГ. 117;
на ФИГ. 125 представлен вид в перспективе другого альтернативного варианта осуществления блокировки шарнира, показанной в заблокированном состоянии;
на ФИГ. 126 представлен вид с пространственным разделением компонентов блокировки шарнира, изображенной на ФИГ. 125;
на ФИГ. 127 представлен вид в сечении в вертикальной проекции блокировки шарнира, изображенной на ФИГ. 125, на котором блокировка шарнира показана в первом незаблокированном состоянии для шарнирного поворота концевого эффектора в первом направлении;
на ФИГ. 128 представлен вид в сечении в вертикальной проекции блокировки шарнира, изображенной на ФИГ. 125, на котором блокировка шарнира показана в заблокированном состоянии;
на ФИГ. 129 представлен вид в сечении в вертикальной проекции блокировки шарнира, изображенной на ФИГ. 125, на котором блокировка шарнира показана во втором незаблокированном состоянии для шарнирного поворота концевого эффектора во втором направлении;
на ФИГ. 130 представлен вид в сечении в вертикальной проекции блокировки шарнира, изображенной на ФИГ. 125, на котором блокировка шарнира показана в заблокированном состоянии;
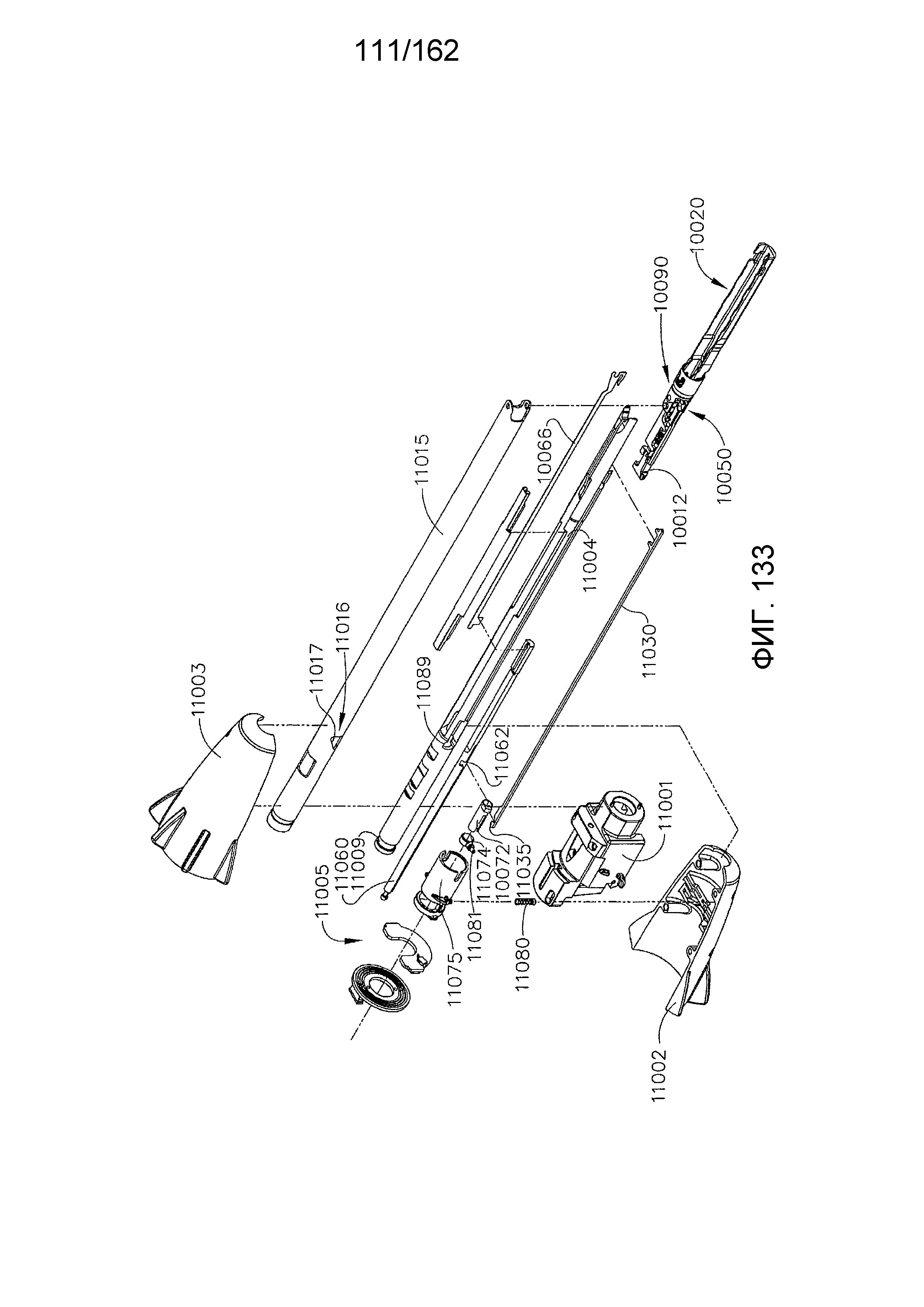
на ФИГ. 131 представлен вид в перспективе узла стержня;
на ФИГ. 132 представлен вид с пространственным разделением компонентов узла стержня, изображенного на ФИГ. 131, на котором показан альтернативный вариант осуществления узла сцепления для функционального соединения привода шарнира с пусковым приводом узла стержня;
на ФИГ. 133 представлен другой вид с пространственным разделением компонентов узла стержня, изображенного на ФИГ. 131;
на ФИГ. 134 представлен частичный вид с пространственным разделением компонентов узла стержня, изображенного на ФИГ. 131, на котором части удалены для целей иллюстрации;
на ФИГ. 135 представлен вид с торца узла стержня, изображенного на ФИГ. 131, на котором части удалены для целей иллюстрации;
на ФИГ. 136 представлен другой вид с торца узла стержня, изображенного на ФИГ. 131, на котором части удалены для целей иллюстрации;
на ФИГ. 137 представлен частичный вид в сечении в вертикальной проекции узла стержня, изображенного на ФИГ. 131;
на ФИГ. 138 представлен частичный вид в перспективе в сечении узла стержня, изображенного на ФИГ. 131;
на ФИГ. 139 представлен другой частичный вид в сечении узла стержня, изображенного на ФИГ. 131;
на ФИГ. 140 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в зацепленном положении, а части удалены для целей ясности; в частности, показан исполнительный механизм сцепления, а гильза сцепления, барабан переключателя, проксимальный шкив шарнира и закрывающая трубка не показаны;
на ФИГ. 141 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в зацепленном положении, а части удалены для целей ясности; в частности, показаны исполнительный механизм сцепления и гильза сцепления, а барабан переключателя, проксимальный шкив шарнира и закрывающая трубка не показаны;
на ФИГ. 142 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в расцепленном положении, а части удалены для целей ясности; в частности, показаны исполнительный механизм сцепления и гильза сцепления, а барабан переключателя, проксимальный шкив шарнира и закрывающая трубка не показаны;
на ФИГ. 143 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в расцепленном положении, а части удалены для целей ясности; в частности, показаны исполнительный механизм сцепления, гильза сцепления и закрывающая трубка, а барабан переключателя и проксимальный шкив шарнира не показаны;
на ФИГ. 144 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в расцепленном положении; показаны исполнительный механизм сцепления, гильза сцепления, закрывающая трубка, барабан переключателя и проксимальный шкив шарнира;
на ФИГ. 145 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в зацепленном положении, а части удалены для целей ясности; в частности, показаны исполнительный механизм сцепления, гильза сцепления и проксимальный шкив шарнира, а барабан переключателя и закрывающая трубка не показаны;
на ФИГ. 146 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в зацепленном положении, а части удалены для целей ясности; в частности, показаны исполнительный механизм сцепления, гильза сцепления, проксимальный шкив шарнира и закрывающая трубка, а барабан переключателя не показан; более того, система привода шарнира узла стержня показана в центральном, или шарнирно неповернутом, состоянии;
на ФИГ. 147 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в зацепленном положении, а части удалены для целей ясности; в частности, показаны исполнительный механизм сцепления, гильза сцепления и проксимальный шкив шарнира, а барабан переключателя и закрывающая трубка не показаны; более того, система привода шарнира узла стержня показана в состоянии, в котором концевой эффектор узла стержня может быть шарнирно повернут влево относительно продольной оси узла стержня;
на ФИГ. 148 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в зацепленном состоянии, а части удалены для целей ясности; в частности, показаны исполнительный механизм сцепления, гильза сцепления и проксимальный шкив шарнира, а барабан переключателя и закрывающая трубка не показаны; более того, система привода шарнира узла стержня показана в состоянии, в котором концевой эффектор узла стержня может быть шарнирно повернут вправо относительно продольной оси узла стержня;
на ФИГ. 149 представлен вид в перспективе узла стержня, изображенного на ФИГ. 131, на котором узел сцепления показан в зацепленном состоянии, а части удалены для целей ясности; в частности, показаны исполнительный механизм сцепления, гильза сцепления, закрывающая трубка и проксимальный шкив шарнира, а барабан переключателя не показан;
на ФИГ. 150 представлен вид в перспективе хирургического инструмента в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 151 представлена принципиальная блок-схема системы управления хирургическим инструментом в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 152 представлен вид в перспективе стыковочного элемента хирургического инструмента в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 153 представлен вид сверху стыковочного элемента, изображенного на ФИГ. 152;
на ФИГ. 154 представлен вид в сечении стыковочного элемента, изображенного на ФИГ. 152, в неактивной или нейтральной конфигурации в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 155 представлен вид в сечении стыковочного элемента, изображенного на ФИГ. 152, активированного для шарнирного поворота концевого эффектора в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 156 представлен вид в сечении стыковочного элемента, изображенного на ФИГ. 152, активированного для возврата концевого эффектора в положение исходного состояния шарнира в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 157 представлен вид в сечении стыковочного элемента, аналогичного стыковочному элементу, изображенному на ФИГ. 152, в неактивной или нейтральной конфигурации в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 158 представлен вид в сечении стыковочного элемента, изображенного на ФИГ. 152, активированного для шарнирного поворота концевого эффектора в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 159 представлен вид в сечении стыковочного элемента, изображенного на ФИГ. 152, активированного для возврата концевого эффектора в положение исходного состояния шарнира в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 160 представлена принципиальная блок-схема, на которой кратко отображен ответ контроллера хирургического инструмента, изображенного на ФИГ. 150, на входной сигнал сброса в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 161 представлена принципиальная блок-схема, на которой кратко отображен ответ контроллера хирургического инструмента, изображенного на ФИГ. 150, на входной сигнал исходного состояния в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 162 представлена принципиальная блок-схема, на которой кратко отображен ответ контроллера хирургического инструмента, изображенного на ФИГ. 150, на входной сигнал исходного состояния в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 163 представлена принципиальная блок-схема, на которой кратко отображен ответ контроллера хирургического инструмента, изображенного на ФИГ. 150, на входной сигнал пуска в исходном состоянии в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 164 представлен вид сбоку в вертикальной проекции хирургического инструмента, включающего рукоятку, отделенную от стержня, в соответствии с различными вариантами осуществления, описанными в настоящем документе;
на ФИГ. 165 представлен вид сбоку в вертикальной проекции части рукоятки, включающей переключатель замка, и части стержня, включающей блокирующий элемент, в соответствии с различными вариантами осуществления, описанными в настоящем документе;
на ФИГ. 166 представлен частичный вид в сечении хирургического инструмента, изображенного на ФИГ. 150, на котором показан блокирующий элемент в заблокированной конфигурации и открытый переключатель в соответствии с различными вариантами осуществления, описанными в настоящем документе;
на ФИГ. 167 представлен частичный вид в сечении хирургического инструмента, изображенного на ФИГ. 150, на котором блокирующий элемент показан в незаблокированной конфигурации, а закрытый переключатель прижат блокирующим элементом в соответствии с различными вариантами осуществления, описанными в настоящем документе;
на ФИГ. 167A представлен частичный вид в сечении хирургического инструмента, изображенного на ФИГ. 150, на котором показан продвинутый пусковой привод в соответствии с различными вариантами осуществления, описанными в настоящем документе;
на ФИГ. 167B представлен частичный вид в сечении хирургического инструмента, изображенного на ФИГ. 150, на котором пусковой привод показан в оттянутом или базовом положении в соответствии с различными вариантами осуществления, описанными в настоящем документе;
на ФИГ. 168 представлена принципиальная блок-схема, на которой кратко отображен ответ контроллера хирургического инструмента, изображенного на ФИГ. 150, на входной сигнал в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 169 представлена принципиальная блок-схема, на которой кратко отображен ответ контроллера хирургического инструмента, изображенного на ФИГ. 150, на входной сигнал в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе;
на ФИГ. 170 представлен вид снизу электрического двигателя и резонатора в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 171 представлен вид в перспективе резонатора, изображенного на ФИГ. 170;
на ФИГ. 172 представлен вид снизу резонатора, изображенного на ФИГ. 170;
на ФИГ. 173 представлен частичный вид в перспективе рукоятки хирургического инструмента, на котором показан электрический двигатель, изображенный на ФИГ. 170, и резонатор, расположенный внутри рукоятки, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 174 представлен вид снизу электрического двигателя и резонатора, изображенных на ФИГ. 173;
на ФИГ. 175 представлен вид в перспективе резонатора, изображенного на ФИГ. 173;
на ФИГ. 176 представлен вид снизу резонатора, изображенного на ФИГ. 173;
на ФИГ. 177 представлен частичный вид в перспективе рукоятки, изображенной на ФИГ. 173, на котором показан электрический двигатель, изображенный на ФИГ. 170, и резонатор, расположенный внутри рукоятки, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 178 представлен вид снизу электрического двигателя и резонатора, изображенных на ФИГ. 177;
на ФИГ. 179 представлен первый вид в перспективе резонатора, изображенного на ФИГ. 177;
на ФИГ. 180 представлен второй вид в перспективе резонатора, изображенного на ФИГ. 177;
на ФИГ. 181 представлен вид в перспективе рукоятки, изображенной на ФИГ. 173, на котором показан электрический двигатель, изображенный на ФИГ. 170, резонатор и стопорное кольцо, расположенное внутри рукоятки, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 182 представлена структурная схема работы хирургического инструмента во время хирургической операции в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 183 представлен вид в перспективе с пространственным разделением компонентов рукоятки хирургического инструмента, изображенного на ФИГ. 34, на котором показана часть сенсорного механизма системы абсолютного позиционирования в соответствии с одним вариантом осуществления;
на ФИГ. 184 представлен вид сбоку в вертикальной проекции рукоятки, изображенной на ФИГ. 34 и 183, причем часть кожуха рукоятки удалена для отображения части сенсорного механизма системы абсолютного позиционирования в соответствии с одним вариантом осуществления;
на ФИГ. 185 представлена принципиальная схема системы абсолютного позиционирования, содержащей управляемый микроконтроллером механизм с электроприводной цепью, содержащий сенсорный механизм, в соответствии с одним вариантом осуществления;
на ФИГ. 186 представлен подробный вид в перспективе сенсорного механизма системы абсолютного позиционирования в соответствии с одним вариантом осуществления;
на ФИГ. 187 представлен вид в перспективе с пространственным разделением компонентов сенсорного механизма системы абсолютного позиционирования, на котором показан узел платы со схемой управления и относительное совмещение элементов сенсорного механизма в соответствии с одним вариантом осуществления;
на ФИГ. 188 представлен вид сбоку в перспективе сенсорного механизма системы абсолютного позиционирования, на котором показан узел платы со схемой управления, в соответствии с одним вариантом осуществления;
на ФИГ. 189 представлен вид сбоку в перспективе сенсорного механизма системы абсолютного позиционирования с удаленным узлом платы со схемой управления для отображения узла держателя сенсорного элемента в соответствии с одним вариантом осуществления;
на ФИГ. 190 представлен вид сбоку в перспективе сенсорного механизма системы абсолютного позиционирования с удаленными узлами платы со схемой управления и держателя сенсорного элемента для отображения сенсорного элемента в соответствии с одним вариантом осуществления;
на ФИГ. 191 представлен вид сверху сенсорного механизма системы абсолютного позиционирования с удаленной платой со схемой управления, но с все еще видимыми электронными компонентами для отображения относительного положения между датчиком положения и компонентами цепи в соответствии с одним вариантом осуществления;
на ФИГ. 192 представлена принципиальная схема одного варианта осуществления датчика положения для системы абсолютного позиционирования, содержащей магнитную ротационную систему абсолютного позиционирования, в соответствии с одним вариантом осуществления;
на ФИГ. 193 представлено шарнирное сочленение в прямом положении, т.е. при нулевом угле относительно продольного направления, в соответствии с одним вариантом осуществления;
на ФИГ. 194 представлено шарнирное сочленение, изображенное на ФИГ. 193, шарнирно повернутое в одном направлении с образованием первого угла между продольной осью L-A и осью шарнирного поворота A-A в соответствии с одним вариантом осуществления;
на ФИГ. 195 представлено шарнирное сочленение, изображенное на ФИГ. 193, шарнирно повернутое в другом направлении с образованием второго угла между продольной осью L-A и осью шарнирного поворота A’-A в соответствии с одним вариантом осуществления;
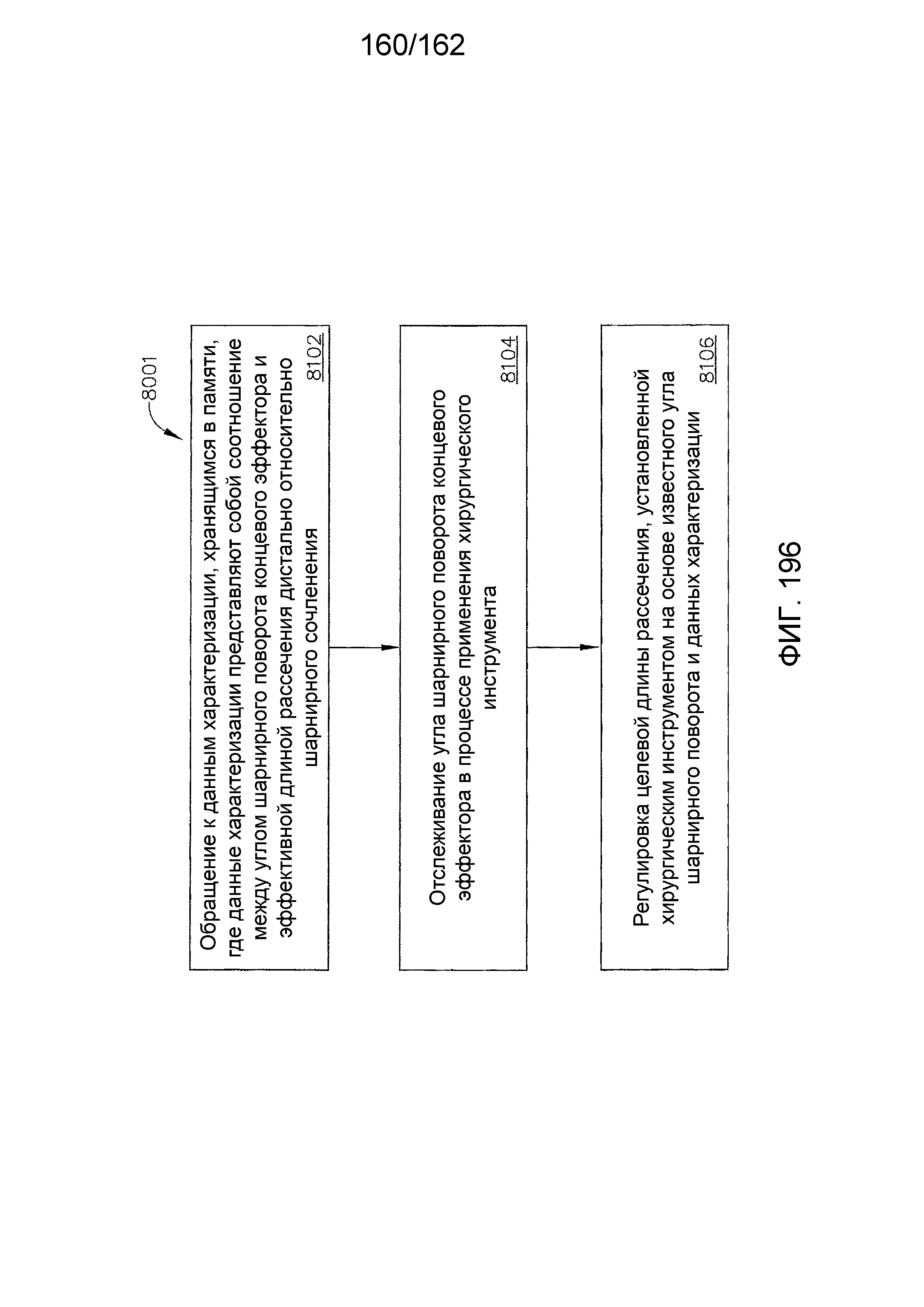
на ФИГ. 196 представлен один вариант осуществления логической схемы для способа компенсации эффекта скашивания в гибких полотнах скальпелей по длине рассечения;
на ФИГ. 197 представлена схема системы отключения питания на электрическом разъеме рукоятки хирургического инструмента, когда узел стержня с ней не соединен;
на ФИГ. 198 представлена схема, на которой показана система управления скоростью двигателя и/или скоростью приводимого элемента хирургического инструмента, раскрытого в настоящем документе; и
на ФИГ. 199 представлена схема, на которой показана другая система управления скоростью двигателя и/или скоростью приводимого элемента хирургического инструмента, раскрытого в настоящем документе.
Для соответствующих частей на разных видах использованы соответствующие условные обозначения. Иллюстративные примеры, представленные в настоящем документе, в одной форме предназначены для иллюстрации определенных вариантов осуществления настоящего изобретения, и такие иллюстративные примеры не следует толковать как каким-либо образом ограничивающие объем настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 1 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США с серийным № 13/782,295, озаглавленная «ШАРНИРНО ПОВОРАЧИВАЕМЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ПРОВОДЯЩИМИ ДОРОЖКАМИ ДЛЯ ПЕРЕДАЧИ СИГНАЛА»;
- заявка на патент США с серийным № 13/782,323, озаглавленная «ВРАЩАЮЩИЕСЯ ШАРНИРНЫЕ СОЧЛЕНЕНИЯ С ЭЛЕКТРОПИТАНИЕМ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782,338, озаглавленная «МЕХАНИЗМЫ ДИСКОВОГО ПЕРЕКЛЮЧАТЕЛЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782,499, озаглавленная «ЭЛЕКТРОМЕХАНИЧЕСКОЕ ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С МЕХАНИЗМОМ СИГНАЛЬНОГО РЕЛЕ»;
- заявка на патент США с серийным № 13/782,460, озаглавленная «МНОГОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782,358, озаглавленная «УЗЛЫ РЫЧАЖНОГО ПЕРЕКЛЮЧАТЕЛЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782,481, озаглавленная «КОНЦЕВОЙ ЭФФЕКТОР, ВЫПРЯМЛЯЕМЫЙ С ПОМОЩЬЮ ДАТЧИКА ВО ВРЕМЯ ИЗВЛЕЧЕНИЯ ЧЕРЕЗ ТРОАКАР»;
- заявка на патент США с серийным № 13/782,518, озаглавленная «СПОСОБЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ СО СЪЕМНЫМИ РАБОЧИМИ ЧАСТЯМИ»;
- заявка на патент США с серийным № 13/782,375, озаглавленная «ВРАЩАЮЩИЕСЯ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ЭЛЕКТРОПИТАНИЕМ С МНОЖЕСТВОМ СТЕПЕНЕЙ СВОБОДЫ»; и
- заявка на патент США с серийным № 13/782,536, озаглавленная «МЯГКИЙ ОГРАНИЧИТЕЛЬ ХОДА ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», которые полностью включены в настоящий документ путем ссылки.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные в тот же день и полностью включенные в настоящий документ путем ссылки:
- заявка на патент США, озаглавленная «УПРАВЛЯЮЩИЕ МЕХАНИЗМЫ ДЛЯ ПРИВОДНОГО ЭЛЕМЕНТА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», досье патентного поверенного № END7261USNP/130029;
- заявка на патент США, озаглавленная «СМЕННЫЕ УЗЛЫ СТЕРЖНЯ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ», досье патентного поверенного № END7259USNP/130030;
- заявка на патент США, озаглавленная «ШАРНИРНО ПОВОРАЧИВАЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ БЛОКИРОВКУ ШАРНИРА», досье патентного поверенного № END7260USNP/130031;
- заявка на патент США, озаглавленная «СЕНСОРНЫЕ МЕХАНИЗМЫ СИСТЕМЫ АБСОЛЮТНОГО ПОЗИЦИОНИРОВАНИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7262USNP/130032;
- заявка на патент США, озаглавленная «МНОГОФУНКЦИОНАЛЬНЫЙ ДВИГАТЕЛЬ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», досье патентного поверенного № END7257USNP/130033;
- заявка на патент США, озаглавленная «МЕХАНИЗМЫ БЛОКИРОВКИ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7254USNP/130034;
- заявка на патент США, озаглавленная «СИСТЕМА УПРАВЛЕНИЯ ШАРНИРНЫМ СОЧЛЕНЕНИЕМ ДЛЯ ШАРНИРНО ПОВОРАЧИВАЕМЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7258USNP/130035;
- заявка на патент США, озаглавленная «СПОСОБ И СИСТЕМА РАБОТЫ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ», досье патентного поверенного № END7256USNP/130037; и
- заявка на патент США, озаглавленная «ШАРНИРНО ПОВОРАЧИВАЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД», досье патентного поверенного № END7263USNP/130079.
Для обеспечения полного понимания принципов конструкции, функционирования, производства и применения устройств и способов, раскрытых в настоящем документе, будет приведено описание некоторых примеров осуществления. Один или более примеров этих вариантов осуществления проиллюстрированы сопроводительными чертежами. Обычному специалисту в данной области будет понятно, что устройства и способы, конкретно описанные в настоящем документе и проиллюстрированные сопроводительными чертежами, представляют собой не имеющие ограничительного характера примеры осуществления, а также что объем различных вариантов осуществления настоящего изобретения определяется только формулой изобретения. Особенности, проиллюстрированные или описанные в связи с одним примером осуществления, могут быть скомбинированы с особенностями других вариантов осуществления. Предполагается, что объем настоящего изобретения включает в себя такие модификации и вариации.
В настоящем описании ссылка на «различные варианты осуществления», «некоторые варианты осуществления», «один вариант осуществления», «вариант осуществления» и т.п. означает, что конкретная особенность, конструкция или характеристика, описанные в связи с вариантом осуществления, включены по меньшей мере в один вариант осуществления. Таким образом, фразы «в различных вариантах осуществления», «в некоторых вариантах осуществления», «в одном варианте осуществления», «в варианте осуществления» и т.п., используемые в настоящем описании, необязательно относятся к одному и тому же варианту осуществления. Более того, конкретные особенности, конструкции или характеристики могут быть скомбинированы любым подходящим способом в одном или более вариантах осуществления. Таким образом, конкретные особенности, конструкции или характеристики, проиллюстрированные или описанные в связи с одним вариантом осуществления, могут без ограничений быть полностью или частично скомбинированы с особенностями, конструкциями или характеристиками одного или более другого варианта осуществления. Предполагается, что объем настоящего изобретения включает в себя такие модификации и вариации.
В настоящем документе термины «проксимальный» и «дистальный» применяются в отношении врача, манипулирующего частью рукоятки хирургического инструмента. Термин «проксимальный» относится к части, размещенной ближе всего к врачу, а термин «дистальный» относится к части, размещенной на удалении от врача. Также следует понимать, что для удобства и ясности в настоящем документе в отношении чертежей могут применяться пространственные термины, такие как «вертикальный», «горизонтальный», «верх» и «низ». Однако хирургические инструменты применяются во многих ориентациях и положениях, и эти термины не предполагают ограничивающий и/или абсолютный характер.
Предложены различные примеры устройств и способов проведения лапароскопических и минимально инвазивных хирургических процедур. Однако обычному специалисту в данной области будет понятно, что различные способы и устройства, раскрытые в настоящем документе, можно применять в рамках множества хирургических процедур, а также сфер применения, включая, например, связанные с проведением открытых хирургических процедур. По ходу данного подробного описания обычный специалист в данной области также сможет дополнительно оценить, что различные инструменты, раскрытые в настоящем документе, могут быть введены в организм любым способом, таким как через естественное отверстие, через разрез или пункционное отверстие, образованное в ткани, и т.д. Рабочие части или части концевых эффекторов инструментов могут быть введены в организм пациента непосредственно или через устройство доступа, которое имеет рабочий канал, через который могут быть продвинуты концевой эффектор и удлиненный стержень хирургического инструмента.
На ФИГ. 1-3 представлен пример хирургического инструмента 100, который может включать в себя рукоятку 103, стержень 104 и шарнирно поворачивающийся концевой эффектор 102, вращательно соединенный со стержнем 104 шарнирным сочленением 110. Предусмотрено устройство управления шарниром 112, которое предусмотрено для воздействия на поворот концевого эффектора 102 вокруг шарнирного сочленения 110. Показан концевой эффектор 102, выполненный с возможностью функционировать как эндокатер для зажатия, рассечения и сшивания скобами ткани, однако следует понимать, что различные варианты осуществления могут включать в себя концевые эффекторы, выполненные с возможностью функционировать как другие хирургические устройства, включая, например, захваты, режущие устройства, сшивающие скобами устройства, клипсонакладыватели, устройства доступа, устройства для доставки препаратов/генной терапии, ультразвуковые, РЧ и/или лазерные устройства и т.д. Рукоятка 103 инструмента 100 может включать в себя закрывающий спусковой механизм 114 и пусковой крючок 116 для активации концевого эффектора 102. Следует понимать, что инструменты с концевыми эффекторами, предназначенные для различных хирургических задач, могут иметь различное количество или типы спусковых механизмов или других подходящих средств управления для работы с концевым эффектором. Концевой эффектор 102 соединен с рукояткой 103 с помощью стержня 104. Врач может шарнирно поворачивать концевой эффектор 102 относительно стержня 104, используя устройство управления шарниром 112, как дополнительно более подробно описано ниже.
Следует понимать, что пространственные термины, такие как вертикальный, горизонтальный, правый, левый и т.д. приведены в настоящем документе в отношении чертежей с учетом предположения о том, что продольная ось хирургического инструмента 100 расположена коаксиально центральной оси стержня 104, причем спусковые механизмы 114, 116 проходят вниз под острым углом от низа рукоятки 103. Однако в действительной практике хирургический инструмент 100 может быть ориентирован под разными углами, и как таковые эти пространственные термины применяются в отношении самого хирургического инструмента 100. Дополнительно термин «проксимальный» применяется для обозначения угла зрения врача, который находится позади рукоятки 103 и размещает концевой эффектор 102 в дистальном направлении, или от себя. При применении в настоящем документе фраза «по существу поперечен продольной оси», где «продольная ось» представляет собой ось стержня, означает направление, которое почти перпендикулярно продольной оси. Однако следует понимать, что направления, которые несколько отклоняются от перпендикуляра относительно продольной оси, также являются по существу поперечными продольной оси.
Различные варианты осуществления, раскрытые в настоящем документе, относятся к инструментам, имеющим шарнирное сочленение, приводимое сгибающими тросами или ремнями. На ФИГ. 4 и 5 показан вид сверху в сечении удлиненного стержня 104 и концевого эффектора 102, включающего ремень 205, механически соединенный со ступицей 206, проходящей от концевого эффектора 102. Ремень 205 может включать в себя части ремня 202 и 204, проходящие проксимально от ступицы 206 вдоль удлиненного стержня 104 и через устройство управления шарниром 112. Ремень 205 и части ремня 202, 204 могут иметь фиксированную длину. Ремень 205 может быть механически соединен со ступицей 206, как показано, с применением любого подходящего способа сшивания, включая, например, клей, сварку и т.д. В различных вариантах осуществления каждая часть ремня 202, 204 может быть выполнена в виде отдельного ремня, причем у каждого отдельного ремня один конец может быть механически соединен со ступицей 206, а другой конец может проходить через стержень 104 и контроллер шарнира 112. Отдельные ремни могут быть механически соединены со ступицей 206, как описано выше.
В дополнение к указанному выше, части ремня 202, 204 могут проходить от ступицы 206 через шарнирное сочленение 110 и вдоль стержня 104 к устройству управления шарниром 112, показанному на ФИГ. 6. Устройство управления шарниром 112 может включать в себя ползунок шарнира 208, раму 212 и кожух 218. Части ремня 202, 204 могут проходить через ползунок шарнира 208 с помощью прорези 210 или другого отверстия, хотя следует понимать, что части ремня 202, 204 могут быть соединены с ползунком 208 любыми подходящими средствами. Ползунок шарнира 208 может представлять собой один элемент, как показано на ФИГ. 6, или может включать в себя два элемента со стыковочным элементом между двумя частями, образующими прорезь 210. В одном не имеющем ограничительного характера варианте осуществления ползунок шарнира 208 может включать в себя, например, множество прорезей, причем каждая прорезь выполнена с возможностью принимать одну из частей ремня 202, 204. Кожух 218 может покрывать различные компоненты устройства управления шарниром 112 для предотвращения попадания органических остатков в устройство управления шарниром 112.
Как показано на ФИГ. 6, части ремня 202, 204 могут быть зафиксированы на раме 212 в точках соединения 214, 216 соответственно, которые расположены проксимально от прорези 210. Следует понимать, что части ремня 202, 204 могут быть зафиксированы в любом месте инструмента 10, размещенном проксимально от прорези 210, включая рукоятку 103. В не имеющем ограничительного характера варианте осуществления, изображенном на ФИГ. 6, показано, что части ремня 202, 204 могут содержать изогнутую конфигурацию между соединительными точками 214, 216 и прорезью 210, размещенной поблизости от продольной оси стержня 104. Предусмотрены другие варианты осуществления, в которых части ремня 202, 204 являются прямыми.
На ФИГ. 7-9 показаны виды концевого эффектора 102 и удлиненного стержня 104 инструмента 100, включающего шарнирное сочленение 110, показанное на ФИГ. 5. На ФИГ. 7 показан вид с пространственным разделением компонентов концевого эффектора 102 и удлиненного стержня 104, включая различные внутренние компоненты. По меньшей мере в одном варианте осуществления рама концевого эффектора 150 и рама стержня 154 выполнены с возможностью соединения с шарнирным сочленением 110. Ступица 206 может быть неотъемлемой частью рамы концевого эффектора 150, причем ремень 205 может стыковаться со ступицей 206, как показано на фигуре. Рама стержня 154 может включать в себя дистально направленный хвостовик 302, образующий отверстие 304. Отверстие 304 может быть расположено так, чтобы стыковаться с шарнирным штифтом (не показан), включенным в раму концевого эффектора 150, что позволяет раме концевого эффектора 150 вращаться относительно рамы стержня 154 и, соответственно, концевому эффектору 102 вращаться относительно стержня 104. При сборке различные компоненты могут вращаться вокруг шарнирного сочленения 110 по оси вращения 306, показанной на ФИГ. 9 и 10.
На ФИГ. 7 также показан упор 120. В данном не имеющем ограничительного характера варианте осуществления упор 120 соединен с удлиненным каналом 198. Например, в удлиненном канале 198 могут быть образованы отверстия 199, которые могут принимать штифты 152, проходящие от упора 120, и позволяют упору 120 вращаться из открытого положения в закрытое положение относительно удлиненного канала 198 и кассеты со скобами 118. Кроме того, на ФИГ. 7 показан пусковой стержень 172, выполненный с возможностью продольно поступательно перемещаться по раме стержня 154 через гибкое шарнирное сочленение закрывающей трубки и вращающейся рамы 110, а также через пусковую щель 176 в дистальной раме 150 в концевой эффектор 102. Пусковой стержень 172 может быть изготовлен из одной сплошной секции или, в различных вариантах осуществления, он может включать в себя многослойный материал, содержащий, например, комплект стальных пластин. Следует понимать, что пусковой стержень 172 из многослойного материала может снижать усилие, необходимое для шарнирного поворота концевого эффектора 102. В различных вариантах осуществления на раме концевого эффектора 150 может быть смонтирован пружинный зажим 158 для смещения пускового стержня 172 вниз. Дистальное и проксимальное квадратные отверстия 164, 168, образованные сверху рамы концевого эффектора 150, могут образовывать между ними планку зажима 170, которая принимает верхнее плечо 162 пружинного зажима 158, нижнее дистально проходящее плечо 160 которого оказывает направленное вниз усилие на приподнятую часть 174 пускового стержня 172, как описано ниже.
Дистально выступающий конец пускового стержня 172 может быть прикреплен к трехрогому элементу 178, который может, помимо прочего, помогать отделять упор 120 от кассеты со скобами 118, расположенной в удлиненном канале 198, когда упор 120 находится в закрытом положении. Трехрогий элемент 178 также может включать в себя заостренный режущий край 182, который может применяться для рассечения ткани по мере продвижения трехрогого элемента 178 дистально пусковым стержнем 172. В процессе эксплуатации трехрогий элемент 178 также может активироваться или обеспечивать срабатывание кассеты со скобами 118. Кассета со скобами 118 может включать в себя формованный корпус кассеты 194, который удерживает множество скоб 191, уложенных на выталкиватели скоб 192 внутри соответствующих открытых вверх гнездах для скоб 195. Трехрогий элемент 178 дистально выталкивает клиновидные салазки 190, которые скользят по лотку кассеты 196, удерживающему вместе различные компоненты съемной кассеты со скобами 118. Клиновидные салазки 190 поднимают вверх выталкиватели скоб 192 для выталкивания скоб 191 в деформирующий контакт с упором 120, в то время как режущая поверхность 182 трехрогого элемента 178 рассекает зажатую ткань.
В дополнение к указанному выше, трехрогий элемент 178 может включать в себя верхние штифты 180, которые зацепляют упор 120 во время активации. Трехрогий элемент 178 дополнительно может включать в себя средние штифты 184 и пятку 186, которые могут зацеплять различные части корпуса кассеты 194, лотка кассеты 196 и удлиненного канала 198. Когда кассета со скобами 118 расположена внутри удлиненного канала 198, прорезь 193, образованная в корпусе кассеты 194, может быть совмещена с прорезью 197, образованной в лотке кассеты 196, и прорезью 189, образованной в удлиненном канале 198. В процессе применения трехрогий элемент 178 может скользить по совмещенным прорезям 193, 197 и 189, причем, как показано на ФИГ. 7, пятка 186 трехрогого элемента 178 может зацеплять канавку, проходящую вдоль нижней поверхности канала 198 вдоль длины прорези 189, средние штифты 184 могут зацеплять верхние поверхности лотка кассеты 196 вдоль длины продольной прорези 197, а верхние штифты 180 могут зацеплять упор 120. В таких обстоятельствах трехрогий элемент 178 может отделять или ограничивать относительное перемещение между упором 120 и кассетой со скобами 118 по мере перемещения пускового стержня 172 дистально для наложения скоб из кассеты со скобами 118 и/или рассечения ткани, захваченной между упором 120 и кассетой со скобами 118. После этого пусковой стержень 172 и трехрогий элемент 178 можно оттянуть проксимально, что позволяет упору 120 открыться, чтобы высвободить две сшитые скобами и рассеченные части ткани (не показаны).
На ФИГ. 7-9 также показан узел двухшарнирной закрывающей гильзы 121 в соответствии с различными вариантами осуществления. Как в особенности показано на ФИГ. 7, узел двухшарнирной закрывающей гильзы 121 включает в себя секцию закрывающей трубки стержня 128, имеющую верхний и нижний хвостовики 146, 148, выступающие дистально. Секция закрывающей трубки концевого эффектора 126 включает в себя подковообразное отверстие 124 и язычок 123 для зацепления открывающего язычка 122 на упоре 120. Подковообразное отверстие 124 и язычок 123 зацепляют язычок 122, когда упор 120 открыт. Показано, что секция закрывающей трубки 126 имеет проксимально выступающие верхний 144 и нижний (не виден) хвостовики. Верхнее двухшарнирное звено 130 включает в себя выступающие вверх дистальный и проксимальный шарнирные штифты 134, 136, которые зацепляют, соответственно, верхнее дистальное штифтовое отверстие 138 в верхнем проксимально выступающем хвостовике 144 и верхнее проксимальное штифтовое отверстие 140 в верхнем дистально выступающем хвостовике 146. Нижнее двухшарнирное звено 132 включает в себя выступающие вниз дистальный и проксимальный шарнирные штифты (на ФИГ. 7 не показаны, но см. ФИГ. 8), которые зацепляют, соответственно, нижнее дистальное штифтовое отверстие в нижнем проксимально выступающем хвостовике и нижнее проксимальное штифтовое отверстие 142 в нижнем дистально выступающем хвостовике 148.
В процессе применения узел закрывающей гильзы 121 поступательно дистально перемещается для закрытия упора 120, например, в ответ на активацию закрывающего спускового механизма 114. Упор 120 закрывается путем поступательного перемещения секции закрывающей трубки 126 и, следовательно, узла гильзы 121 дистально, что приводит к тому, что он ударяется о проксимальную поверхность упора 120, расположенного на ФИГ. 9A слева от язычка 122. Как более ясно показано на ФИГ. 8 и 9, упор 120 открывается путем поступательного перемещения секции трубки 126 и узла гильзы 121 проксимально, что приводит к тому, что язычок 123 и подковообразное отверстие 124 входят в контакт и давят на язычок 122, поднимая упор 120. В положении с открытым упором узел двухшарнирной закрывающей гильзы 121 перемещен в проксимальное положение.
В процессе эксплуатации врач может шарнирно повернуть концевой эффектор 102 инструмента 100 относительно стержня 104 вокруг шарнира 110, надавив на элемент управления 112 латерально. Из нейтрального положения врач может шарнирно повернуть концевой эффектор 102 влево относительно стержня 104, приложив латеральное усилие к левой стороне устройства управления 112. В ответ на усилие ползунок шарнира 208 может быть по меньшей мере частично вдавлен в раму 212. По мере вдавливания ползунка 208 в раму 212 прорезь 210, а также часть ремня 204 могут поступательно перемещаться по удлиненному стержню 104 в поперечном направлении, например, в направлении, по существу поперечном (перпендикулярном) продольной оси стержня 104. Соответственно, к части ремня 204 прилагается усилие, приводящее к ее упругому изгибу и/или смещению из исходного предварительно изогнутого положения в направлении противоположной стороны стержня 104. Одновременно часть ремня 202 ослабевает относительно своего исходного предварительного изогнутого положения. Такое перемещение части ремня 204 с одновременным распрямлением части ремня 202 позволяет приложить вращательное усилие в направлении против часовой стрелки к ступице 206, которое в свою очередь приводит к тому, что ступица 206 и концевой эффектор 102 вращаются влево вокруг шарнирного сочленения 110 на желаемый угол относительно оси стержня 104, как показано на ФИГ. 12. Ослабление части ремня 202 снижает натяжение этой части ремня, что позволяет части ремня 204 шарнирно повернуть концевой эффектор 102 без значительной помехи со стороны части ремня 202. Следует понимать, что врач также может шарнирно повернуть концевой эффектор 102 вправо относительно стержня 104, приложив латеральное усилие к правой стороне устройства управления 112. Это приводит к сгибанию части троса 202, вызывая вращательное усилие в направлении по часовой стрелке к ступице 206, что в свою очередь приводит к тому, что ступица 206 и концевой эффектор вращаются вправо вокруг шарнирного сочленения 110. Аналогично указанному выше, часть ремня 204 может быть одновременно ослаблена, позволяя выполнить такое перемещение.
На ФИГ. 12 и 13 показан хирургический режущий и сшивающий инструмент с приводом 310. Данный представленный на иллюстрациях вариант осуществления показывает эндоскопический инструмент и, как правило, инструмент 310, описанный в настоящем документе, который представляет собой хирургический эндоскопический режущий и сшивающий инструмент. Однако следует отметить, что настоящее изобретение этим не ограничено и, что в соответствии с другими вариантами осуществления любой инструмент, раскрытый в настоящем документе, может содержать хирургический неэндоскопический режущий и сшивающий инструмент. Хирургический инструмент 310, показанный на ФИГ. 12 и 13, содержит рукоятку 306, стержень 308 и концевой эффектор 312, соединенный со стержнем 308. В различных вариантах осуществления концевой эффектор 312 может быть шарнирно повернут относительно стержня 308 вокруг шарнирного сочленения 314. Различные средства шарнирного поворота концевого эффектора 312 и/или средства обеспечения шарнирного поворота концевого эффектора 312 относительно стержня 308 раскрыты в патенте США № 7,753,245, озаглавленном «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ СКОБАМИ ИНСТРУМЕНТЫ», выпущенном 13 июля 2010 г., и в патенте США № 7,670,334, озаглавленном «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ШАРНИРНЫЙ КОНЦЕВОЙ ЭФФЕКТОР», выпущенном 2 марта 2010 г., полное описание которых включено в настоящий документ путем ссылки. Различные другие средства шарнирного поворота концевого эффектора 312 более подробно описаны ниже. Аналогично вышеуказанному, концевой эффектор 312 выполнен с возможностью функционировать в качестве эндокатера для зажатия, рассечения и/или сшивания ткани скобами, хотя в других вариантах осуществления могут применяться разные типы концевых эффекторов, такие как концевые эффекторы для других типов хирургических устройств, зажимы, режущие устройства, сшивающие скобами устройства, клипсонакладыватели, устройства доступа, устройства для введения препаратов/генной терапии, ультразвуковые, РЧ и/или лазерные устройства и т.д. Описание нескольких РЧ-устройств можно найти в патенте США № 5,403,312, озаглавленном «ЭЛЕКТРОХИРУРГИЧЕСКОЕ ГЕМОСТАТИЧЕСКОЕ УСТРОЙСТВО», выпущенном 4 апреля 1995 г., и в заявке на патент США с серийным № 12/031,573, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ РЧ-ЭЛЕКТРОДЫ», поданной 14 февраля 2008 г., полные описания которых включены путем ссылки.
Следует понимать, что термины «проксимальный» и «дистальный» применяются в настоящем документе в отношении захвата врачом рукоятки 306 инструмента 310. Таким образом, концевой эффектор 312 расположен дистально по отношению к более проксимальной рукоятке 306. Дополнительно следует понимать, что для удобства и ясности пространственные термины, такие как «вертикальный» и «горизонтальный», применяются в настоящем документе по отношению к чертежам. Однако хирургические инструменты применяются во многих ориентациях и положениях, и не предполагается, что эти термины являются ограничивающими и абсолютными.
Концевой эффектор 312 может включать в себя, помимо прочего, канал для скоб 322 и зажимный элемент с возможностью поступательного перемещения вращательно, такой как, например, упор 324. Рукоятка 306 инструмента 310 может включать в себя закрывающий спусковой механизм 318 и пусковой крючок 320 для активации концевого эффектора 312. Следует понимать, что инструменты с концевыми эффекторами, предназначенными для различных хирургических задач, могут иметь другое количество или типы спусковых механизмов или других подходящих устройств управления для работы с концевым эффектором 312. Рукоятка 306 может включать в себя проходящую вниз пистолетную рукоятку 326, в направлении которой хирург вращательно прижимает закрывающий спусковой механизм 318 для зажатия или закрытия упора 324 в направлении канала для скоб 322 концевого эффектора 312, чтобы посредством этого зажать ткань, расположенную между упором 324 и каналом 322. В других вариантах осуществления в дополнение или вместо упора 324 могут применяться различные типы зажимных элементов. Рукоятка 306 дополнительно может включать в себя блокировку, которая может быть выполнена с возможностью разъемно удерживать закрывающий спусковой механизм 318 в его закрытом положении. Более полная информация о вариантах осуществления примера закрывающей системы для закрытия (или зажатия) упора 324 концевого эффектора 312 путем оттягивания закрывающего спускового механизма 318 приведена в патенте США № 7,000,818, озаглавленном «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ СКОБАМИ ИНСТРУМЕНТ, ИМЕЮЩИЙ ОТДЕЛЬНЫЕ СИСТЕМЫ ЗАКРЫТИЯ И АКТИВАЦИИ», выпущенном 21 февраля 2006 г., патенте США № 7,422,139, озаглавленном «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ С ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ПОЗИЦИОНИРОВАНИЯ», выпущенном 9 сентября 2008 г., а также в патенте США № 7,464,849, озаглавленном «ЭЛЕКТРОМЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С СИСТЕМОЙ ЗАКРЫТИЯ И КОМПОНЕНТАМИ ВЫРАВНИВАНИЯ УПОРА», выпущенном 16 декабря 2008 г., полные описания которых включены в настоящий документ путем ссылки.
Когда врача устраивает позиционирование концевого эффектора 312, он может оттянуть назад закрывающий спусковой механизм 318 в полностью закрытое заблокированное положение поблизости от пистолетной рукоятки 326. Затем может активироваться или срабатывать пусковой крючок 320. По меньшей мере в одном таком варианте осуществления пусковой крючок 320 может быть расположен дальше наружу от закрывающего спускового механизма 318, причем закрытие закрывающего спускового механизма 318 может перемещать или поворачивать пусковой крючок 320 в направлении пистолетной рукоятки 326 так, чтобы до пускового крючка 320 в различных обстоятельствах оператор мог достать одной рукой. После этого оператор может вращательно прижать пусковой крючок 320 в направлении пистолетной рукоятки 312, чтобы выполнить сшивание скобами и рассечение ткани, зажатой в концевом эффекторе 312. После этого пусковой крючок 320 можно возвратить в неактивированное или несработавшее положение (показанное на ФИГ. 1 и 2), после того как врач ослабит и прекратит прилагать усилие к пусковому крючку 320. Чтобы высвободить заблокированный закрывающий спусковой механизм 318, необходимо нажать кнопку высвобождения на рукоятке 306. Кнопка высвобождения может быть реализована в различных формах, таких как, например, раскрытые в опубликованной заявке на патент США № 2007/0175955, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ С БЛОКИРУЮЩИМ МЕХАНИЗМОМ ЗАКРЫВАЮЩЕГО СПУСКОВОГО МЕХАНИЗМА», поданной 31 января 2006 г., полное описание которой включено в настоящий документ путем ссылки.
В дополнение к указанному выше, концевой эффектор 312 может включать в себя режущий инструмент, такой как скальпель, например, для разрезания зажатой в концевом эффекторе 312 ткани при оттягивании пользователем пускового крючка 320. Дополнительно к указанному выше, концевой эффектор 312 также может содержать средства для сшивания ткани, рассеченной режущим инструментом, таким как, например, скобы, РЧ-электроды и/или адгезивы. Выполненный с возможностью перемещения продольно приводной стержень, расположенный внутри стержня 308 инструмента 310, может приводить в действие/активировать режущий инструмент и средства сшивания в концевом эффекторе 312. Для приведения в действие приводного стержня может применяться электрический двигатель, расположенный в рукоятке 306 инструмента 310, как дополнительно описано в настоящем документе. В различных вариантах осуществления двигатель может представлять собой приводной щеточный двигатель постоянного тока с максимальной скоростью вращения, например, приблизительно 25 000 оборотов в минуту. В других вариантах осуществления двигатель может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель. Батарея (или «источник питания», или «силовой агрегат»), такой как, например, литий-ионная батарея, может находиться в части пистолетной рукоятки 26 рукоятки 6, смежной с двигателем, причем батарея может подавать электропитание к двигателю через цепь управления двигателем. В качестве источника питания для подачи питания на двигатель может применяться ряд последовательно соединенных элементов питания. Кроме того, источник питания может быть съемным и/или перезаряжаемым.
Как кратко описано выше, электрический двигатель в рукоятке 306 инструмента 310 может быть функционально зацеплен с выполненным с возможностью продольного перемещения приводным элементом, расположенным внутри стержня 308. Как показано на ФИГ. 14-16, электрический двигатель 342 может быть установлен на части пистолетной рукоятки 326 рукоятки 306 и расположен внутри нее. Электрический двигатель 342 может включать в себя вращаемый стержень, функционально связанный с узлом зубчатого редуктора 370, причем узел зубчатого редуктора 370 может включать в себя, помимо прочего, кожух 374 и выходную ведущую шестерню 372. В некоторых вариантах осуществления выходная ведущая шестерня 372 может быть непосредственно функционально зацеплена с выполненным с возможностью продольного перемещения приводным элементом 382 или, альтернативно, функционально зацеплена с приводным элементом 382 с помощью одной или более промежуточных шестерней 386. Промежуточная шестерня 386 по меньшей мере в одном таком варианте осуществления может быть сцепленно зацеплена с набором или рейкой приводных зубцов 384, образованных в приводном элементе 382. В процессе применения электрический двигатель 342 может приводить приводной элемент дистально, как указано стрелкой D (ФИГ. 15), и/или проксимально, как указано стрелкой D (ФИГ. 16), в зависимости от направления, в котором электрический двигатель 342 поворачивает промежуточную шестерню 386. В процессе применения полярность напряжения, обеспечиваемая батареей, позволяет электрическому двигателю 342 работать в направлении по часовой стрелке, причем полярность напряжения, приложенного к электрическому двигателю батареей, может быть изменена на обратную для работы электрического двигателя 342 в направлении против часовой стрелки. Рукоятка 306 может включать в себя переключатель, который может быть выполнен с возможностью изменять на обратную полярность, прилагаемую к электрическому двигателю 342 батареей. Рукоятка 306 также может включать в себя датчик 330, выполненный с возможностью обнаруживать положение приводного элемента 382 и/или направление перемещения приводного элемента 382.
Как было указано выше, хирургический инструмент 310 может включать в себя шарнирное сочленение 314, вокруг которого может шарнирно поворачиваться концевой эффектор 312. Инструмент 310 дополнительно может включать в себя блокировку шарнира, которая может быть выполнена с возможностью и может работать так, чтобы обеспечивать избирательную блокировку концевого эффектора 312 в положении. По меньшей мере в одном таком варианте осуществления блокировка шарнира может проходить от проксимального конца стержня 308 к дистальному концу стержня 308, причем дистальный конец блокировки шарнира может зацеплять концевой эффектор 312 для блокировки концевого эффектора 312 в положении. Как также показано на ФИГ. 12 и 13, инструмент 310 дополнительно может включать в себя устройство управления шарниром 316, которое может быть зацеплено с проксимальным концом блокировки шарнира и которое может быть выполнено с возможностью работы блокировки шарнира между заблокированным состоянием и незаблокированным состоянием. В процессе применения устройство управления шарниром 316 может быть вытянуто проксимально для разблокирования концевого эффектора 312, чтобы концевой эффектор 312 мог поворачиваться вокруг шарнирного сочленения 314. После выполнения подходящего шарнирного поворота концевого эффектора 312 устройство управления шарниром 316 может быть перемещено дистально для повторной блокировки концевого эффектора 312 в положении. По меньшей мере в одном таком варианте осуществления рукоятка 306 дополнительно может включать в себя пружину и/или другие подходящие смещающие элементы, выполненные с возможностью смещать устройство управления шарниром 316 дистально и смещать блокировку шарнира в заблокированную конфигурацию с концевым эффектором 312. При необходимости врач еще раз может потянуть устройство управления шарниром 316 назад, или проксимально, чтобы разблокировать концевой эффектор 312, шарнирно повернуть концевой эффектор 312, а затем переместить устройство управления шарниром 316 назад в его заблокированное состояние. В таком заблокированном состоянии концевой эффектор 312 не может шарнирно поворачиваться относительно стержня 308.
Как кратко описано выше, хирургический инструмент 310 может включать в себя блокировку шарнира, выполненную с возможностью удерживать концевой эффектор 312 в положении относительно стержня 308. Как кратко описано выше, концевой эффектор 312 можно поворачивать, или шарнирно повернуть, относительно стержня 308, когда блокировка шарнира находится в ее незаблокированном состоянии. В таком незаблокированном состоянии концевой эффектор 312 может быть позиционирован и прижат к мягкой ткани и/или кости, например, окружающей операционное поле внутри организма пациента, в результате чего концевой эффектор 312 шарнирно поворачивается относительно стержня 308. В некоторых вариантах осуществления устройство управления шарниром 316 может содержать переключатель шарнира, или оно может быть выполнено с возможностью работы переключателя шарнира, который может избирательно обеспечивать и/или предотвращать работу пускового крючка 320 от электрического двигателя 342. Например, такой переключатель шарнира может быть размещен последовательно с электрическим двигателем 342, и пусковой переключатель может быть функционально связан с пусковым крючком 320, причем переключатель шарнира может находиться в закрытом состоянии, когда устройство управления шарниром 316 находится в заблокированном состоянии. Когда устройство управления шарниром 316 перемещено в незаблокированное состояние, устройство управления шарниром 316 может открывать переключатель шарнира, посредством этого разрывая электрический контакт для работы пускового крючка 320 и работы электрического двигателя 342. В таких обстоятельствах пусковой привод инструмента 310 не может быть активирован, когда концевой эффектор 312 находится в незаблокированном состоянии и шарнирно поворачивается относительно стержня 308. Когда устройство управления шарниром 316 возвращается в заблокированное состояние, устройство управления шарниром 316 может повторно замыкать переключатель шарнира, что затем может приводить к электрическому контакту для работы пускового крючка 320 с электрическим двигателем 342. Различная подробная информация по одному или более хирургическому сшивающему скобами инструменту раскрыта в заявке на патент с серийным № 12/647,100, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ С ЭЛЕКТРИЧЕСКИМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ УЗЛА УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ», поданной 24 декабря 2009 г., которая была опубликована 30 июня 2011 г. в виде публикации заявки на патент США № 2011/0155785, полное описание которой включено в настоящий документ путем ссылки.
Как показано на ФИГ. 17-29, хирургический инструмент 400 может содержать рукоятку 403, стержень 404, проходящий от рукоятки 403, и концевой эффектор 402, проходящий от стержня 404. Как отметит читатель, части рукоятки 403 были удалены для целей иллюстрации, однако рукоятка 403 может включать в себя закрывающий спусковой механизм и пусковой крючок, например, аналогичный закрывающему спусковому механизму 114 и пусковому крючку 116, показанному на ФИГ. 1. Как будет более подробно описано ниже, пусковой крючок 116 может быть функционально соединен с пусковым приводом, включающим пусковой элемент 470, проходящий через стержень 404, причем работа пускового крючка 116 может продвигать пусковой элемент 470 дистально в направлении концевого эффектора 402. Как ниже также будет описано более подробно, хирургический инструмент 400 может дополнительно включать в себя привод шарнира, который может быть избирательно соединен с пусковым элементом 470 так, что когда пусковой элемент 470 подталкивается, например, пусковым крючком 116 и/или отдельным шарнирным крючком и/или кнопкой, привод шарнира может приводиться пусковым элементом 470, а привод шарнира в свою очередь может шарнирно поворачивать концевой эффектор 402 вокруг шарнирного сочленения 410.
Читатель отметит, что на ФИГ. 17 концевой эффектор 402 хирургического инструмента 400 показан в открытой конфигурации. Более конкретно первая бранша концевого эффектора 402, содержащая упор 420, показана в открытом положении относительно канала 498 второй бранши концевого эффектора 402. Аналогично вышеуказанному, канал 498 может быть выполнен с возможностью принимать и фиксировать в нем кассету со скобами. Как показано на ФИГ. 20, на котором также показан концевой эффектор 420 в открытой конфигурации, рукоятка 403 хирургического инструмента 400 может включать в себя исполнительный механизм блокировки шарнира 409, который может перемещаться между дистальным, или заблокированным, положением, в котором концевой эффектор 402 заблокирован в положении относительно стержня 404, и проксимальным, или незаблокированным, положением, в котором концевой эффектор 402 может шарнирно поворачиваться относительно стержня 404 вокруг шарнирного сочленения 410. Хотя концевой эффектор 402 и стержень 404 на ФИГ. 20 показаны совмещенными в прямой конфигурации, исполнительный механизм блокировки шарнира 409 показан в его оттянутом незаблокированном положении, в результате чего концевой эффектор 402 может быть шарнирно повернут относительно стержня 404. Как показано на ФИГ. 19, 24A и 24B, исполнительный механизм блокировки шарнира 409 (ФИГ. 21) может быть функционально соединен с блокировкой шарнира 443, причем исполнительный механизм блокировки шарнира 409 может перемещать блокировку шарнира 443 между дистальным положением (ФИГ. 24A), в котором блокировка шарнира 443 зацеплена с проксимальным элементом блокировки 407 концевого эффектора 402, и проксимальным положением (ФИГ. 24B), в котором блокировка шарнира 443 расцеплена от концевого эффектора 402. Как будет понятно читателю, дистальное заблокированное положение исполнительного механизма блокировки шарнира 409 соответствует дистальному положению блокировки шарнира 443, а проксимальное незаблокированное положение исполнительного механизма блокировки шарнира 409 соответствует проксимальному положению блокировки шарнира 443. Как показано на ФИГ. 19, блокировка шарнира 443 соединена с исполнительным механизмом блокировки шарнира 409 с помощью планки блокировки шарнира 440, которая содержит дистальный конец 442, зацепленный с блокировкой шарнира 443, как лучше показано на ФИГ. 24A, и проксимальный конец 441, зацепленный с исполнительным механизмом блокировки шарнира 409, как лучше показано на ФИГ. 22. Как показано на ФИГ. 24A и 24B, блокировка шарнира 443 может содержать один или более зубцов 445, которые могут быть выполнены с возможностью сцепленно зацепляться за один или более зубцов 446, например, образованных вокруг периметра проксимального элемента блокировки 407. Как показано преимущественно на ФИГ. 19, стержень 404 дополнительно может содержать смещающий элемент, например, такой как пружина 444, которая может быть выполнена с возможностью смещать зубец 445 блокировки шарнира 443 в зацепление с зубцом 446 проксимального элемента блокировки 407 концевого эффектора 402. Аналогичным образом, рукоятка 403 дополнительно может содержать смещающий элемент, расположенный внутри полости 488 (ФИГ. 23), образованной между исполнительным механизмом блокировки шарнира 409 и рамой 480 так, что смещающий элемент может толкать исполнительный механизм блокировки шарнира 409 в направлении его дистального заблокированного положения.
Как показано на ФИГ. 17, исполнительный механизм блокировки шарнира 409 может состоять из двух половин форсунки, или частей, 411a и 411b, причем, как отметит читатель, часть форсунки 411b удалена с ФИГ. 18-27 для целей иллюстрации. Как также показано на ФИГ. 17, исполнительный механизм блокировки шарнира 409 может содержать множество крючков для пальцев 413, за которые может ухватываться хирург или другой врач, чтобы оттянуть исполнительный механизм блокировки шарнира 409 в его проксимальную незаблокированную конфигурацию. Исполнительный механизм блокировки шарнира 409, как также показано на ФИГ. 20, может дополнительно включать в себя узел стопора 452, который может быть выполнен с возможностью смещать стопорный элемент 457 относительно рамы стержня 404 или рамы рукоятки 403. Более конкретно стержень 404 может содержать раму стержня 454, проходящую от рамы рукоятки 480, причем узел стопора 452 может быть выполнен с возможностью смещать стопорный элемент 457 относительно рамы стержня 454. Как показано на ФИГ. 19, рама стержня 454 может включать в себя образованный в ней канал стопора 453, который может быть совмещен со стопорным элементом 457 так, что по мере того как исполнительный механизм блокировки шарнира 409 скользит между заблокированным и незаблокированным положениями, описанными выше, стопорный элемент 457 может скользить внутри канала стопора 453. Узел стопора 452, как также показано на ФИГ. 20, может включать в себя неподвижную часть рамы 458, в которой может быть образовано резьбовое отверстие, выполненное с возможность принимать регулируемый резьбовой элемент 459. Регулируемый резьбовой элемент 459 может включать в себя внутреннее отверстие, причем по меньшей мере часть стопорного элемента 457 может быть расположена внутри внутреннего отверстия и причем стопорный элемент 457 может быть смещен к концу внутреннего отверстия с помощью пружины, например, расположенной в промежутке между стопорным элементом 457 и закрытым концом внутреннего отверстия. Как показано на ФИГ. 19, проксимальный конец канала стопора 453 может содержать седло стопора 455, которое может быть выполнено с возможностью съемно принимать стопорный элемент 457, когда исполнительный механизм блокировки шарнира 409 достиг его проксимального незаблокированного положения. В различных обстоятельствах стопорный элемент 457, седло стопора 455 и смещающая пружина, расположенная в регулируемом резьбовом элементе 459, могут быть выполнены по форме и размеру так, чтобы узел стопора 452 мог разъемно удерживать исполнительный механизм блокировки шарнира 409 в его проксимальном незаблокированном положении. Как более подробно описано ниже, исполнительный механизм блокировки шарнира 409 может удерживаться в его проксимальном незаблокированном положении до тех пор, пока концевой эффектор 402 не будет надлежащим образом шарнирно повернут. В этот момент исполнительный механизм блокировки шарнира 409 можно нажать вперед, чтобы расцепить стопорный элемент 457 от седла стопора 455. Как будет понятно читателю, главным образом на ФИГ. 20 показано, что регулируемый резьбовой элемент 459 можно поворачивать вниз в направлении рамы стержня 454, чтобы увеличить усилие, необходимое для отделения стопорного элемента 457 от седла стопора 455, в то время как регулируемый резьбовой элемент 459 можно поворачивать вверх от рамы стержня 454, чтобы снизить усилие, необходимое для отделения стопорного элемента 457 от седла стопора 455. Как также показано на ФИГ. 20, исполнительный механизм блокировки шарнира 409 может содержать отверстие для доступа 418, который может использоваться для получения доступа и поворота резьбового элемента 459.
Как описано выше, исполнительный механизм блокировки шарнира 409 находится в оттянутом незаблокированном положении, показанном на ФИГ. 20, а концевой эффектор 402 находится в незаблокированной конфигурации, как показано на ФИГ. 24B. Как показано на ФИГ. 19 и 20, хирургический инструмент 400 дополнительно содержит шкив шарнира 460, который может быть протолкнут дистально, чтобы поворачивать концевой эффектор 402 вокруг шарнирного сочленения 410 в первом направлении, и вытянут проксимально, чтобы поворачивать концевой эффектор 402 вокруг шарнирного сочленения во втором, или противоположном, направлении, как показано на ФИГ. 21. При сравнении ФИГ. 20 и 21 читатель отметит, что шкив шарнира 460 был вытянут проксимально с помощью пускового элемента 470. Более конкретно в промежуточной части 475 пускового элемента 470 может содержаться образованная в нем щель или прорезь 476, которая может быть выполнена с возможностью принимать проксимальный конец 461 шкива шарнира 460 так, что когда пусковой элемент 470 вытягивают проксимально, пусковой элемент 470 также может вытягивать шкив шарнира 460 проксимально. Аналогичным образом, когда пусковой элемент 470 проталкивают дистально, пусковой элемент 470 может дистально толкать шкив шарнира 460. Как также показано на ФИГ. 20 и 21, шкив шарнира 460 может содержать дистальный конец 462, зацепленный с выступом 414, проходящим, например, от проксимального элемента блокировки 407, который может быть выполнен с возможностью передавать проксимальное и дистальное шарнирные движения шкива шарнира 460 к концевому эффектору 102. Как показано преимущественно на ФИГ. 18-20, рукоятка 404 может дополнительно содержать проксимальную часть 482 пускового элемента 470, включающую в себя дистальный конец 481, зацепленный с проксимальным концом 477 промежуточной части 475 пускового элемента 470. Аналогично указанному выше, рукоятка 403 может включать в себя электрический двигатель, содержащий выходной стержень и шестерню, функционально зацепленную с выходным стержнем, причем шестерня может быть функционально зацеплена за продольный набор зубцов 484, образованных в поверхности части пускового элемента 482. В процессе применения, в дополнение к указанному выше, электрический двигатель может работать в первом направлении, продвигая пусковой элемент 470 дистально, и во втором, или противоположном, направлении, оттягивая пусковой элемент 470 проксимально. Хотя на фигуре это не показано, рукоятка 403 дополнительно может содержать переключатель, который может находиться в первом состоянии, чтобы электрический двигатель мог работать в его первом направлении, во втором состоянии, чтобы электрический двигатель мог работать в его втором направлении, и/или в нейтральном состоянии, в котором электрический двигатель не работает ни в одном направлении. По меньшей мере в одном таком варианте осуществления переключатель может включать в себя по меньшей мере один смещающий элемент, такой как пружина, например, который может быть выполнен с возможностью смещать переключатель в его нейтральное состояние. Также по меньшей мере в одном таком варианте осуществления, например, первое состояние переключателя шарнира может содержать первое положение механизма переключателя с первой стороны от нейтрального положения, а второе состояние переключателя шарнира может содержать второе положение механизма переключателя со второй, или противоположной, стороны от нейтрального положения.
В различных обстоятельствах, в дополнение к указанному выше, переключатель шарнира может применяться для внесения небольших корректировок в положение концевого эффектора 402. Например, хирург может переместить переключатель шарнира в первом направлении для поворота концевого эффектора 402 вокруг шарнирного сочленения в первом направлении, а затем изменять на обратное перемещение концевого эффектора 402 путем перемещения переключателя шарнира во втором направлении, и/или может предполагать любые другие подходящие комбинации перемещений в первом и втором направлениях до тех пор, пока концевой эффектор 402 не займет желаемое положение. Как показано преимущественно на ФИГ. 19, 24A и 24B, шарнирное сочленение 410 может включать в себя шарнирный штифт 405, проходящий от элемента рамы стержня 451, и, в дополнение к этому, отверстие 408, образованное в проксимальном элементе блокировки 407, выполненном с возможностью плотно принимать в него шарнирный штифт 405 так, что поворот концевого эффектора 402 ограничен, например, поворотом вокруг оси шарнира 406. Как показано преимущественно на ФИГ. 19, дистальный конец рамы стержня 454 может включать в себя выемку 456, выполненную с возможностью принимать в нее элемент рамы стержня 451. Как будет более подробно описано ниже, стержень 404 может включать в себя внешнюю гильзу, которая может скользить относительно рамы стержня 454 для закрытия упора 420. Как показано преимущественно на ФИГ. 19-21, внешняя гильза стержня 410 может содержать проксимальную часть 428 и дистальную часть 426, которые могут соединяться друг с другом шарнирными звеньями 430 и 432. Когда внешняя гильза скользит относительно шарнирного сочленения 410, шарнирные звенья 430 могут обеспечивать угловое относительное перемещение между дистальной частью 426 и проксимальной частью 428 внешней гильзы, когда осуществляется шарнирный поворот концевого эффектора 402, как показано на ФИГ. 21. В различных обстоятельствах шарнирные звенья 430 и 432 могут обеспечивать две или более степеней свободы шарнирного сочленения 410 для обеспечения шарнирного поворота концевого эффектора 402. Читатель также отметит, что шарнирное сочленение 410 дополнительно может включать в себя направляющую 401, которая может быть выполнена с возможностью принимать в нее дистальную режущую часть 472 пускового элемента 470 и направлять дистальную режущую часть 472 по мере ее продвижения дистально и/или оттягивания проксимально внутри и/или относительно шарнирного сочленения 410.
Как кратко описано выше, пусковой элемент 470 может быть продвинут дистально для продвижения шкива шарнира 460 дистально и в результате этого поворота концевого эффектора 402 в первом направлении. Аналогичным образом, пусковой элемент 470 может быть оттянут проксимально для оттягивания шкива шарнира 460 проксимально и в результате этого поворота концевого эффектора 402 в противоположном направлении. Однако в некоторых обстоятельствах может быть нежелательно перемещать или по меньшей мере по существу перемещать дистальную режущую часть 472 пускового элемента 470, когда пусковой элемент 470 используется для шарнирного поворота концевого эффектора 402. Как показано на ФИГ. 19-21, промежуточная часть 475 пускового элемента 470 может содержать продольную прорезь 474, образованную в ее дистальной части, которая может быть выполнена с возможностью принимать проксимальный конец 473 дистальной режущей части 472. Продольная прорезь 474 и проксимальный конец 473 могут быть выполнены по форме и размеру так, чтобы обеспечить относительное перемещение между ними, и могут содержать скользящее сочленение 471. Скользящее сочленение 471 может обеспечивать перемещение промежуточной части 475 пускового привода 470 для шарнирного поворота концевого эффектора 402 без перемещения или по меньшей мере без перемещения по существу дистальной режущей части 472. После того как концевой эффектор 402 приобрел подходящую ориентацию, промежуточную часть 475 можно продвигать дистально до тех пор, пока проксимальная боковая стенка продольной прорези 474 не вступит в контакт с проксимальным концом 473 для продвижения дистальной режущей части 472 и не наложит скобы из кассеты, расположенной внутри канала 498, как дополнительно более подробно описано ниже. Как показано преимущественно на ФИГ. 19, рама стержня 454 может содержать образованную в ней продольную прорезь 469, которая может быть выполнена с возможностью скользящего приема шкива шарнира 460. Аналогичным образом, проксимальная часть 428 внешней гильзы стержня может содержать продольное отверстие 425, выполненное с возможностью обеспечивать относительное перемещение между шкивом шарнира 460 и внешней гильзой стержня 404, описанными выше.
В дополнение к указанному выше, исполнительный механизм блокировки шарнира 409 может быть выполнен с возможностью смещать проксимальную часть 461 шкива шарнира 460 в направлении приводного элемента 470, когда исполнительный механизм блокировки шарнира 409 находится в его проксимальном незаблокированном положении. Более конкретно, по меньшей мере в одном таком варианте осуществления внутренняя поверхность исполнительного механизма блокировки шарнира 409 может содержать кулачок, который может зацеплять латеральную сторону 466 проксимальной части 461 и смещать проксимальную часть 461 в зацепление с прорезью 476, образованной в промежуточной части 475 приводного элемента 470. Когда исполнительный механизм блокировки шарнира 409 перемещен назад в его дистальное заблокированное положение, исполнительный механизм блокировки шарнира 409 может более не смещать проксимальную часть 461 внутрь в направлении приводного элемента 470. По меньшей мере в одном таком варианте осуществления рукоятка 403 и/или стержень 404 могут содержать упругий элемент, такой как, например, пружина, которая может быть выполнена с возможностью смещать проксимальную часть 461 наружу от пускового элемента 470 так, что проксимальная часть 461 не будет функционально зацепляться с прорезью 476 до тех пор, пока смещающее усилие упругого элемента не будет преодолено исполнительным механизмом блокировки шарнира 409 при перемещении исполнительного механизма блокировки шарнира 409 проксимально в его незаблокированное положение, как описано выше. В различных обстоятельствах проксимальная часть 461 и прорезь 476 могут содержать ограничивающее усилие сцепление.
После того как концевой эффектор 402 был шарнирно повернут в желаемое положение, в дополнение к указанному выше, можно активировать закрывающий спусковой механизм 114 для перемещения упора 420 в направлении его закрытого положения, как показано на ФИГ. 22. Более конкретно, закрывающий спусковой механизм 114 может продвигать внешнюю гильзу стержня 410 дистально так, чтобы, например, дистальная часть 426 внешней гильзы могла толкать упор 420 дистально и вниз. Упор 420 может содержать выступы 497, проходящие от противоположных сторон упора 420, каждый из которых может быть выполнен с возможностью скользить и поворачиваться внутри удлиненных прорезей 499, образованных в канале кассеты 498. Упор 420 дополнительно может содержать выступ 496, проходящий от него вверх, который может быть расположен внутри отверстия 495, образованного в дистальной части 426 внешней гильзы, причем боковая стенка отверстия 495 может находиться в контакте с выступом 496 по мере того, как дистальная часть 426 продвигается дистально для перемещения упора 420 в направлении канала кассеты 498. Активация закрывающего привода, в дополнение к указанному выше, также может перемещать исполнительный механизм блокировки шарнира 409 из его проксимального незаблокированного положения (ФИГ. 20-22) в его дистальное заблокированное положение (ФИГ. 23). Более конкретно, закрывающий привод может быть выполнен с возможностью продвигать дистально каретку закрывающего привода 415, которая может находиться в контакте с кольцом 450, смонтированным внутри исполнительного механизма шарнира 409, как показано на ФИГ. 22. Как показано на ФИГ. 19 и 22, кольцо 450 может содержать противоположные части, или половины, которые могут быть собраны вместе так, чтобы противоположные части кольца 450 могли окружать стержень 404. Кольцо 450 также может поддерживать узел стопора 452, который описан выше, и может включать в себя монтажную часть, зацепленную с проксимальным концом 441 планки блокировки шарнира 440, которая также описана выше. В любом случае каретка закрывающего привода 415 может находиться в контакте с кольцом 450 и заставлять скользить исполнительный механизм блокировки шарнира 409 дистально, а также, в дополнение к указанному выше, смещать элемент стопора 457 из седла стопора 455, как показано на ФИГ. 19, в канал стопора 453 так, чтобы исполнительный механизм блокировки шарнира 409 можно было протолкнуть в его заблокированное положение, а блокировку шарнира 443 можно было переместить в зацепление с проксимальной частью блокировки 407 и заблокировать концевой эффектор 402 в положении, как показано на ФИГ. 23. В этот момент каретка закрывающего привода 415 может предотвращать разблокирование и шарнирный поворот концевого эффектора 402 до тех пор, пока закрывающий привод и упор 420 не будут повторно открыты, а каретка закрывающего привода 415 не будет перемещена проксимально, как дополнительно более подробно описано ниже.
Как показано на ФИГ. 25, активация закрывающего привода с помощью привода исполнительного механизма 114 и дистальное продвижение внешней гильзы 428 стержня 410 также может функционально расцеплять шкив шарнира 460 от пускового привода 470. После повторного изучения ФИГ. 20 и 21 читатель отметит, что внешняя гильза 428 включает в себя окно 424, образованное в ней, внутри которого может быть расположен поворачиваемый кулачковый элемент 465. Кулачковый элемент 465 может содержать первый конец, поворотно прикрепленный или соединенный с рамой стержня 454, и второй конец, выполненный с возможностью поворачиваться относительно прикрепленного конца кулачкового элемента 465, в то время как в других вариантах осуществления кулачковый элемент 465 может содержать любую подходящую форму. Когда внешняя гильза 428 находится в ее проксимальном положении, а упор 420 находится в его открытой конфигурации, кулачковый элемент 465 может быть в первом положении, которое позволяет проксимальному концу 461 шкива шарнира 460 зацепляться с прорезью 476, образованной в пусковом элементе 470. Однако когда внешняя гильза 428 продвигается дистально, боковая стенка окна 424 может зацепляться за кулачковый элемент 465 и поднимать второй конец кулачкового элемента 465 от рамы стержня 454 во второе положение. В этом втором положении кулачковый элемент 465 может перемещать проксимальный конец 461 шкива шарнира 460 от пускового привода 470 так, чтобы проксимальный конец 461 был более не расположен внутри прорези 476, образованной в пусковом приводе 470. Таким образом, когда закрывающий привод был активирован для закрытия упора 420, закрывающий привод может толкать исполнительный механизм блокировки шарнира 409 в его дистальную заблокированную конфигурацию, а исполнительный механизм блокировки шарнира 409 может толкать блокировку шарнира 445 в заблокированную конфигурацию с концевым эффектором 402, а также, в дополнение к этому, закрывающий привод может функционально отсоединять шкив шарнира 460 от пускового привода 470. В этот момент работы хирургического инструмента 400 активация пускового привода 470 не вызовет шарнирного поворота концевого эффектора 402, а пусковой привод 470 сможет перемещаться независимо от шкива шарнира 460.
Как показано на ФИГ. 26 и как упомянуто выше, пусковой привод 470 может быть продвинут дистально для выталкивания скоб из кассеты со скобами, расположенной внутри канала 498 концевого эффектора 402, а также деформации скоб об упор 420. Как было кратко описано выше, пусковой привод 470 может дополнительно содержать режущий элемент, который может быть выполнен с возможностью поперечно рассекать ткань, захваченную внутри концевого эффектора 402. Как также было упомянуто выше, электрический двигатель внутри рукоятки 403 может быть приведен в действие с помощью пускового исполнительного механизма 116 для продвижения пускового элемента 470 дистально, причем в различных обстоятельствах электрический двигатель может работать до тех пор, пока дистальная режущая часть 472 пускового элемента 470 не достигнет дистального конца кассеты со скобами и/или любого другого подходящего положения внутри кассеты со скобами. В любом случае поворот электрического двигателя может быть изменен на обратный для оттягивания пускового элемента 470 проксимально, как показано на ФИГ. 27. В различных обстоятельствах электрический двигатель может оттягивать проксимальную часть привода 482 и промежуточную часть 475 до тех пор, пока дистальная боковая стенка продольной прорези 474, образованной в промежуточной части 475, не войдет в контакт с проксимальным концом 473 дистального режущего элемента 472. В этот момент дополнительное оттягивание проксимальной части привода 482 и промежуточной части 475 приведет к оттягиванию дистального режущего элемента 472 проксимально. В различных обстоятельствах электрический двигатель может работать до тех пор, пока прорезь 476, образованная в промежуточной части 475 пускового элемента 470, не будет повторно совмещена с проксимальной частью 461 шкива шарнира 460. Однако поскольку закрывающая гильза 428 все еще находится в дистально выдвинутом положении, кулачковый элемент 465 может по-прежнему смещать шкив шарнира 460 из зацепления за пусковой элемент 470. Чтобы обеспечить повторное зацепление шкива шарнира 460 с пусковым элементом 470, в таких обстоятельствах закрывающий привод необходимо повторно открыть, чтобы совместить окно 424, образованное в части внешней гильзы 428, с кулачковым элементом 465 так, чтобы кулачковый элемент 465 можно было вращать внутрь в направлении рамы стержня 454 в его первое положение. В различных обстоятельствах шкив шарнира 460 можно упруго отогнуть, выведя из зацепления за пусковой элемент 470 так, что когда кулачковый элемент 465 может переместиться назад в его первое положение, шкив шарнира 460 может упруго изогнуться внутрь в направлении рамы стержня 454 и повторно зацепиться за проксимальную часть 461 шкива шарнира 460 с помощью прорези 476, образованной в промежуточной части 475 приводного элемента 470. В различных вариантах осуществления хирургический инструмент 400 дополнительно может содержать смещающий элемент, который может быть выполнен с возможностью смещать проксимальную часть 461 назад в зацепление с промежуточной частью 475.
Читатель отметит, что промежуточная часть 475 пускового элемента 470 была оттянута проксимально на ФИГ. 27 так, что прорезь 476, образованная в промежуточной части 475, расположена проксимально относительно проксимальной части 461 шкива шарнира 460. В результате этого в таких обстоятельствах проксимальная часть 461 не сможет повторно функционально соединяться с пусковым элементом 470 до тех пор, пока промежуточная часть 475 не будет продвинута дистально для совмещения прорези 476 с проксимальной частью 461. Такая ситуация может произойти в результате относительного скольжения между промежуточной частью 475 и частью режущего элемента 472 пускового элемента 470, создаваемого скользящим сочленением 471, что может быть реализовано, например, путем кратковременной повторной активации электрического двигателя в первом направлении.
Как также показано на ФИГ. 27, пусковой элемент 470 может находиться в оттянутом положении или положении сброса, однако закрывающий привод может по-прежнему находиться в активированной, или закрытой, конфигурации, которая может предотвратить повторное открытие упора 420 и повторный шарнирный поворот концевого эффектора 402. Как показано на ФИГ. 28, при высвобождении закрывающего привода каретка закрывающего привода 415 может быть оттянута в проксимальное положение, в котором закрывающая гильза, включая части 426 и 428, также оттягивается проксимально. Как показано на ФИГ. 19, проксимальная часть гильзы 428 может включать в себя проксимальный конец 417, который может зацепляться с кареткой закрывающего привода 415 так, что проксимальная часть гильзы 428 и каретка закрывающего привода 415 перемещаются вместе в дистальном направлении и/или проксимальном направлении. В любом случае, в дополнение к указанному выше, проксимальное перемещение дистальной части гильзы 426 может привести к тому, что дистальная боковая стенка отверстия 495 зацепляется за выступ 496, проходящий от упора 420 для вращения упора 420 в его открытое положение, как показано на ФИГ. 29. Более того, проксимальное перемещение каретки закрывающего привода 415 может разблокировать исполнительный механизм блокировки шарнира 409 так, что исполнительный механизм блокировки шарнира 409 может быть перемещен в проксимальное незаблокированное положение, что в результате позволяет вытянуть блокировку шарнира 443 проксимально для сжатия пружины 444 и разблокирования концевого эффектора 402. Затем, как описано выше, концевой эффектор 402 может быть шарнирно повернут вокруг шарнирного сочленения 410, и работу с хирургическим инструментом 400, описанным выше, можно повторить. Как показано преимущественно на ФИГ. 18-20, рукоятка 404 дополнительно может содержать переключатель 408, установленный на раме рукоятки 480, который может быть выполнен с возможностью обнаруживать то, находится ли исполнительный механизм блокировки шарнира 409 в его проксимальном незаблокированном положении. В некоторых вариантах осуществления переключатель 408 может быть функционально соединен с индикатором на рукоятке 404, таком как, например, свет, который может указывать оператору хирургического инструмента 400 на то, что концевой эффектор 402 находится в незаблокированном состоянии и, что оператор может использовать переключатель шарнира, например, для шарнирного поворота концевого эффектора 402.
Как описано выше в связи с вариантом осуществления, изображенным на ФИГ. 17, хирургический инструмент 400 может содержать систему блокировки шарнира, выполненную с возможностью блокировать и разблокировать концевой эффектор 402, а также закрывающий привод, выполненный с возможностью открывать и закрывать упор 420 концевого эффектора 402. Хотя эти две системы хирургического инструмента 400 в нескольких аспектах взаимодействуют, как описано выше, в других аспектах системы могут активироваться независимо друг от друга. Например, исполнительный механизм блокировки шарнира 409 и блокировка концевого эффектора 443 могут активироваться без закрытия упора 420. В этом варианте осуществления хирургического инструмента 400 закрывающий привод работает независимо, закрывая упор 420. Как показано на ФИГ. 30-32, хирургический инструмент 400 может включать в себя альтернативную конфигурацию, в которой закрывающий привод активируется, во-первых, для закрытия упора 420, а во-вторых, для блокирования концевого эффектора 402 в положении. Как показано преимущественно на ФИГ. 31 и 32, стержень 404 может содержать планку блокировки шарнира 540, которая может перемещаться между проксимальным незаблокированным положением (ФИГ. 31), в котором концевой эффектор 402 может шарнирно поворачиваться вокруг шарнирного сочленения 410, и дистальным заблокированным положением (ФИГ. 32), в котором концевой эффектор 402 может быть заблокирован в положении. Аналогично планке блокировки шарнира 440, планка блокировки шарнира 540 может включать в себя дистальный конец 542, функционально зацепленный с блокировкой шарнира 443 так, что когда планка блокировки шарнира 540 вытягивается проксимально, блокировка шарнира 443 также может быть вытянута проксимально. Аналогичным образом, когда планку блокировки шарнира 540 толкают дистально, блокировка шарнира 443 также может толкаться дистально. В отличие от планки блокировки шарнира 440, которая толкается дистально и вытягивается проксимально с помощью исполнительного механизма блокировки шарнира 409, как описано выше, планку блокировки шарнира 540 можно проталкивать дистально и вытягивать проксимально с помощью закрывающей гильзы 428. Более конкретно, проксимальный конец 541 планки блокировки шарнира 540 может содержать крюк 547, который при вытягивании закрывающей гильзы 428 проксимально может захватывать часть закрывающей гильзы 428 и может вытягиваться проксимально с помощью закрывающей гильзы 428. В таких обстоятельствах гильза 428 может вытянуть планку блокировки шарнира 540 в незаблокированное состояние. Как отметит читатель, закрывающая гильза 428 может включать в себя окно 549, внутри которого может быть размещен проксимальный конец 541 планки блокировки шарнира 540. Когда закрывающую гильзу 428 толкают дистально, в дополнение к указанному выше, проксимальная боковая стенка 548 окна 549 может входить в контакт с проксимальным концом 541 и толкать планку блокировки шарнира 540 и блокировку шарнира 443 дистально для блокировки концевого эффектора 402 в положении.
Как описано в настоящем документе, может быть желательно реализовать хирургические системы и устройства, которые могут включать в себя части многоразового использования, выполненные с возможностью применения со сменными хирургическими компонентами. Например, на ФИГ. 33 показана хирургическая система, по существу обозначенная как элемент 1000, которая по меньшей мере в одной форме содержит хирургический инструмент 1010, который может использоваться или не использоваться многократно. Хирургический инструмент 1010 может быть реализован с множеством сменных узлов стержня 1200, 1200’, 1200”. Сменные узлы стержня 1200, 1200’, 1200” могут иметь функционально соединенный с ними хирургический концевой эффектор 1300, 1300’, 1300”, выполненный с возможностью выполнять одну или более хирургических задач или процедур. Например, каждый из хирургических концевых эффекторов 1300, 1300’, 1300” может содержать хирургическое режущее и сшивающее устройство, выполненное с возможностью функционально поддерживать в нем хирургическую кассету со скобами. В каждом из узлов стержня могут использоваться концевые эффекторы, приспособленные для поддержки кассет со скобами разных размеров и типов, которые имеют стержни различной длины, размеров и типов и т.д. Несмотря на то, что на настоящих фигурах показаны концевые эффекторы, выполненные с возможностью разрезать и сшивать скобами ткань, также могут быть реализованы различные аспекты хирургической системы 1000 с хирургическими инструментами, выполненными с возможностью прилагать другие движения и формы энергии, такие как, например, радиочастотная (РЧ) энергия, ультразвуковая энергия и/или движение, в виде сменных механизмов концевых эффекторов, монтируемых на стержень и применяемых для различных сфер применения и процедур. Более того, в концевых эффекторах, узлах стержня, рукоятках, хирургических инструментах и/или системах хирургических инструментов для фиксации ткани может использоваться любой подходящий крепежный элемент или крепежные элементы. Например, кассета с крепежными элементами, содержащая множество съемно хранимых в ней крепежных элементов, может съемно вводиться и/или прикрепляться к концевому эффектору узла стержня. В различных обстоятельствах может осуществляться выбор узла стержня для прикрепления к рукоятке хирургического инструмента и выбор кассеты с крепежными элементами для прикрепления к узлу стержня.
Хирургический инструмент 1010, показанный на ФИГ. 33, содержит кожух 1040, состоящий из рукоятки 1042, выполненной с возможностью захвата, манипулирования и активирования врачом. Однако по мере изучения настоящего подробного описания будет понятно, что различные уникальные и инновационные механизмы различных форм сменных узлов стержня, раскрытые в настоящем документе, также могут эффективно применяться в связи с хирургическими системами с роботизированным управлением. Таким образом, термин «кожух» также может охватывать кожух или аналогичную часть роботизированной системы, которая вмещает или иным образом функционально поддерживает по меньшей мере одну приводную систему, выполненную с возможностью генерировать и применять по меньшей мере одно управляющее движение, которое может применяться для активации сменных узлов стержня, раскрытых в настоящем документе, и их соответствующих эквивалентов. Термин «рама» может относиться к части ручного хирургического инструмента. Термин «рама» также может представлять собой часть хирургического инструмента с роботизированным управлением и/или часть роботизированной системы, которая может применяться для функционального управления хирургическим инструментом. Например, сменные узлы стержня, раскрытые в настоящем документе, могут применяться с различными роботизированными системами, инструментами, компонентами и способами, раскрытыми в публикации заявки на патент США № US 2012/0298719. Заявка на патент США с серийным № 13/118,241, озаглавленная «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ СКОБАМИ ИНСТРУМЕНТЫ С ПОВОРАЧИВАЕМЫМИ МЕХАНИЗМАМИ РАЗМЕЩЕНИЯ СКОБ», в настоящее время - публикация заявки на патент США № 2012/0298719, полностью включена в настоящий документ путем ссылки.
На ФИГ. 34 показан хирургический инструмент 1010 с функционально соединенным с ним сменным узлом стержня 1200. В показанной форме хирургический инструмент включает в себя рукоятку 1042. По меньшей мере в одной форме рукоятка 1042 может содержать пару соединяемых друг с другом сегментов кожуха 1044, 1046, которые могут быть взаимно соединены с помощью винтов, элементов защелок, адгезивов и т.д. См. ФИГ. 35. В показанной конфигурации сегменты кожуха рукоятки 1044, 1046 совместно образуют часть пистолетной рукоятки 1048, которую может захватывать и которой может манипулировать врач. Как будет дополнительно более подробно описано ниже, рукоятка 1042 функционально поддерживает множество приводных систем в ней, которые выполнены с возможностью генерировать и прилагать различные управляющие движения к соответствующим частям сменного узла стержня, к которому эти системы функционально прикреплены.
Рукоятка 1042 дополнительно может включать в себя раму 1080, функционально поддерживающую множество приводных систем. Например, рама 1080 может функционально поддерживать первую или систему закрывающего привода, по существу обозначенную как элемент 1050, которая может быть реализована для приложения закрывающих и открывающих движений к сменному узлу стержня 1200, который функционально связан или прикреплен к нему. По меньшей мере в одной форме система закрывающего привода 1050 может включать в себя исполнительный механизм в форме закрывающего спускового механизма 1052, который вращательно поддерживается рамой 1080. Более конкретно, как показано на ФИГ. 35, закрывающий спусковой механизм 1052 может вращательно поддерживаться рамой 1080 так, что когда врач захватывает часть пистолетной рукоятки 1048 рукоятки 1042, закрывающий спусковой механизм 1052 может быть легко повернут из исходного или неактивированного положения в активированное положение, а более конкретно - в полностью нажатое или полностью активированное положение. Закрывающий спусковой механизм 1052 может быть смещен в неактивированное положение с помощью пружины или другого смещающего механизма (не показан). В различных формах система закрывающего привода 1050 дополнительно включает в себя узел закрывающего звена 1060, который вращательно соединен с закрывающим спусковым механизмом 1052. Как может быть показано на ФИГ. 35, узел закрывающего звена 1060 может включать в себя закрывающий спусковой механизм 1052, вращательно соединенный с закрывающим звеном 1064, которое имеет пару латерально проходящих крепежных ушек или частей 1066, выступающих из него. Закрывающее звено 1064 также в настоящем документе может называться «крепежным элементом».
Как также показано на ФИГ. 35, можно видеть, что на закрывающем спусковом механизме 1052 может иметься блокирующая стенка 1068, выполненная с возможностью совместной работы с узлом высвобождения закрывающего механизма 1070, вращательно соединенным с рамой 1080. По меньшей мере в одной форме узел высвобождения закрывающего механизма 1070 может содержать узел кнопки высвобождения 1072, на котором имеется выступающее дистально плечо элемента, приводимого в действие кулачком, 1074. Узел кнопки высвобождения 1072 может вращаться в направлении против часовой стрелки с помощью пружины высвобождения 1076. Когда врач нажимает на закрывающий спусковой механизм 1052 в его неактивированном положении в направлении части пистолетной рукоятки 1048 рукоятки 1042, закрывающее звено 1062 вращается вверх до точки, в которой плечо элемента, приводимого в действие кулачком, 1072 входит в удерживающее зацепление с блокирующей стенкой 1068 на закрывающем звене 1062, посредством этого не позволяя закрывающему спусковому механизму 1052 вернуться в неактивированное положение. Таким образом, узел высвобождения закрывающего механизма 1070 служит для блокировки закрывающего спускового механизма 1052 в полностью активированном положении. Когда врачу нужно разблокировать закрывающий спусковой механизм 1052, чтобы он смог сместиться в неактивированное положение, врач просто вращает узел кнопки высвобождения закрывающего механизма 1072 так, чтобы плечо элемента, приводимого в действие кулачком, 1074 вышло из зацепления с блокирующей стенкой 1068 на закрывающем спусковом механизме 1052. После того как плечо элемента, приводимого в действие кулачком, 1074 вышло из зацепления с закрывающим спусковым механизмом 1052, закрывающий спусковой механизм 1052 может вращаться назад в неактивированное положение. Также возможна реализация других блокирующих и высвобождающих механизмов закрывающего спускового механизма.
По меньшей мере в одной форме рукоятка 1042 и рама 1080 могут функционально поддерживать другую приводную систему, которая в настоящем документе называется системой пускового привода 1100, выполненной с возможностью прилагать пусковые движения к соответствующим частям прикрепленного к нему сменного узла стержня. Также в настоящем документе система пускового привода может называться «второй приводной системой». В системе пускового привода 1100 может применяться электрический двигатель 1102, размещенный в части пистолетной рукоятке 1048 рукоятки 1042. В различных формах двигатель 1102 может представлять собой приводной щеточный двигатель постоянного тока с максимальной скоростью поворота, например, приблизительно 25 000 оборотов в минуту. В других конфигурациях двигатель может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель. Батарея 1104 (или «источник питания», или «блок питания»), такая как, например, литий-ионная батарея, может быть соединена с рукояткой 1042 и может подавать питание на узел платы со схемой управления 1106 и в конечном итоге двигатель 1102. На ФИГ. 34 показан кожух батареи 1104, выполненный с возможностью разъемно монтироваться к рукоятке 1042 для подачи управляющего питания к хирургическому инструменту 1010. В качестве источника питания для подачи питания на двигатель может применяться ряд последовательно соединенных элементов питания. Кроме того, источник питания может быть съемным и/или перезаряжаемым.
Как кратко описано выше в отношении различных других форм, электрический двигатель 1102 может включать в себя поворачиваемый стержень (не показан), функционально стыкующийся с узлом зубчатого редуктора 1108, который монтируется так, что находится в сцепленном зацеплении с набором или рейкой приводных зубцов 1112 на выполненном с возможностью продольного перемещения приводном элементе 1110. В процессе применения полярность напряжения, обеспечиваемая батареей, позволяет электрическому двигателю 1102 работать в направлении по часовой стрелке, причем полярность напряжения, приложенная к электрическому двигателю батареей, может быть изменена на обратную для работы электрического двигателя 1102 в направлении против часовой стрелки. Когда электрический двигатель 1102 поворачивается в одном направлении, приводной элемент 1110 будет аксиально приводиться в дистальном направлении D. Когда двигатель 1102 приводится в противоположном направлении вращения, приводной элемент 1110 будет аксиально приводиться в проксимальном направлении P. См., например, ФИГ. 35. Рукоятка 1042 может включать в себя переключатель, выполненный с возможностью изменять на обратную полярность, приложенную к электрическому двигателю 1102 батареей. Как и в других формах, описанных в настоящем документе, рукоятка 1042 также может включать в себя датчик, выполненный с возможностью обнаруживать положение приводного элемента 1110 и/или направление, в котором перемещается приводной элемент 1110.
Активацией двигателя 1102 можно управлять с помощью пускового крючка 1120, вращательно поддерживаемого на рукоятке 1042. Пусковой крючок 1120 можно вращать между неактивированным положением и активированным положением. Пусковой крючок 1120 может смещаться в неактивированное положение с помощью пружины (не показана) или другого смещающего механизма так, что когда врач высвобождает пусковой крючок 1120, его можно вращать или иным образом возвращать в неактивированное положение с помощью пружины или смещающего механизма. По меньшей мере в одной форме пусковой крючок 1120 может быть расположен «на удалении» от закрывающего спускового механизма 1052, как было описано выше. По меньшей мере в одной форме к закрывающему спусковому механизму 1052 может вращательно монтироваться кнопка предохранителя пускового крючка 1122. Как может быть показано на ФИГ. 35 и 36, например, кнопка предохранителя 1122 может быть расположена между пусковым крючком 1120 и закрывающим спусковым механизмом 1052 и может иметь выступающее из него плечо вращения 1124. Как показано на ФИГ. 38, когда закрывающий спусковой механизм 1052 находится в неактивированном положении, кнопка предохранителя 1122 содержится в кожухе рукоятки, где врач не может получить к нему простой доступ и переместить его между безопасным положением, предотвращающим активацию пускового крючка 1120, и пусковым положением, в котором пусковой крючок 1120 может быть нажат. Когда врач нажимает на закрывающий спусковой механизм 1052, кнопка предохранителя 1122 и пусковой крючок 1120 вращаются вниз, и в этом положении врач может манипулировать ими.
Как указано выше, по меньшей мере в одной форме выполненный с возможностью продольного перемещения приводной элемент 1110 имеет рейку зубцов 1112, образованных на нем, для сцепленного зацепления с соответствующей приводной шестерней 1114 узла зубчатого редуктора 1108. По меньшей мере одна форма также может включать в себя приводимый в действие вручную «аварийный» узел 1130, выполненный с возможностью того, чтобы врач мог вручную оттянуть выполненный с возможностью продольного перемещения приводной элемент 1110, если двигатель становится недоступен. Аварийный узел 1130 может включать в себя узел рычага или аварийной рукоятки 1132, выполненный с возможностью ручного вращения в храповое зацепление с зубцом 1112 приводного элемента 1110. Таким образом, врач может вручную оттянуть приводной элемент 1110 с помощью узла аварийной рукоятки 1132, чтобы передвинуть приводной элемент с помощью храпового механизма в проксимальном направлении P. В публикации заявки на патент США № US 2010/0089970 раскрыты аварийные механизмы и другие компоненты, механизмы и системы, которые также могут применяться с различными инструментами, раскрытыми в настоящем документе. Заявка на патент США с серийным № 12/249,117, озаглавленная «ХИРУРГИЧЕСКОЕ РЕЖУЩЕЕ И СШИВАЮЩЕЕ СКОБАМИ УСТРОЙСТВО С ЭЛЕКТРОПИТАНИЕМ С ВОЗМОЖНОСТЬЮ РУЧНОГО ОТТЯГИВАНИЯ ПУСКОВОЙ СИСТЕМЫ», в настоящее время - публикация заявки на патент США № 2010/0089970, которая полностью включена в настоящий документ путем ссылки.
На ФИГ. 34 и 37 показана одна форма сменного узла стержня 1200, имеющая, например, функционально прикрепленный к нему хирургический концевой эффектор 1300. Концевой эффектор 1300, как показано на этих чертежах, может быть выполнен с возможностью разрезания и сшивания ткани скобами различными способами, раскрытыми в настоящем документе. Например, концевой эффектор 1300 может включать в себя канал 1302, выполненный с возможностью поддерживать хирургическую кассету со скобами 1304. Кассета со скобами 1304 может содержать съемную кассету со скобами 1304, которая может быть заменена после применения. Однако в других конфигурациях кассета со скобами может быть выполнена так, чтобы после установки внутрь канала 1302 ее не нужно было извлекать из него. Канал 1032 и кассета со скобами 1304 в совокупности могут называться «первой частью бранши» концевого эффектора 1300. В различных формах концевой эффектор 1300 может иметь «вторую часть бранши» в форме упора 1310, который подвижно или вращательно поддерживается на канале 1302 различными способами, описанными в настоящем документе.
Сменный узел стержня 1200 дополнительно может включать в себя стержень 1210, который включает в себя раму стержня 1212, соединенную с модулем крепления стержня или частью крепления стержня 1220. По меньшей мере в одной форме проксимальный конец 1214 рамы стержня 1212 может проходить через полую кольцевую часть 1222, образованную на модуле крепления стержня 1220, и может быть вращательно прикреплен к нему. Например, на проксимальном конце 1214 рамы стержня 1212 может быть предусмотрен кольцевой паз 1216 для зацепления с U-образным ограничителем 1226, проходящим через прорезь 1224 в модуле крепления стержня 1220. Такой механизм позволяет раме стержня 1212 вращаться относительно модуля крепления стержня 1220.
Узел стержня 1200 дополнительно может содержать внешнюю полую гильзу или закрывающую трубку 1250, через которую проходит рама стержня 1212. Также в настоящем документе внешняя гильза 1250 может называться «первым стержнем» и/или «первым узлом стержня». Внешняя гильза 1250 имеет проксимальный конец 1252, приспособленный для вращательного соединения с направляющей траверсой для крепления закрывающей трубки 1260. Как может быть показано на ФИГ. 37, проксимальный конец 1252 внешней гильзы 1250 выполнен с возможностью принимать внутрь ложа 1262 направляющей траверсы для крепления закрывающей трубки 1260. U-образный соединитель 1266 проходит через прорезь 1264 в направляющей траверсе для крепления закрывающей трубки 1260 для приема в кольцевой паз 1254 в проксимальном конце 1252 внешней гильзы 1250. Такой механизм служит для того, чтобы вращательно соединить внешнюю гильзу 1250 с направляющей траверсой для крепления закрывающей трубки 1260 так, что внешняя гильза 1250 может вращаться относительно нее.
Как может быть показано на ФИГ. 38 и 39, проксимальный конец 1214 рамы стержня 1214 выступает проксимально из проксимального конца 1252 внешней гильзы 1250 и вращательно соединен с модулем крепления стержня 1220 с помощью U-образного ограничителя 1226 (показан на ФИГ. 38). Направляющая траверса для крепления закрывающей трубки 1260 выполнена с возможностью скользящего приема внутрь хода 1268 в модуле крепления стержня 1220. Такая конфигурация обеспечивает аксиальное перемещение внешней гильзы 1250 в проксимальном направлении P и дистальном направлении D по раме стержня 1212 относительно модуля крепления стержня 1220, как дополнительно будет более подробно описано ниже.
По меньшей мере в одной форме сменный узел стержня 1200 дополнительно может включать в себя шарнирное сочленение 1350. Однако другие сменные узлы стержня могут не осуществлять шарнирный поворот. Как может быть показано, например, на ФИГ. 37, шарнирное сочленение 1350 включает в себя узел двухшарнирной закрывающей гильзы 1352. В соответствии с различными формами узел двухшарнирной закрывающей гильзы 1352 включает в себя узел закрывающей гильзы стержня 1354, который имеет дистально выступающие верхний и нижний хвостовики 1356, 1358. Узел закрывающей гильзы концевого эффектора 1354 включает в себя подковообразное отверстие 1360 и язычок 1362 для зацепления с открывающим язычком на упоре 1310 способом, описанным выше. Как описано выше, подковообразное отверстие 1360 и язычок 1362 зацепляются с язычком упора, когда упор 1310 открыт. Верхнее двухшарнирное звено 1364 включает в себя выступающие вверх дистальный и проксимальный шарнирные штифты, которые зацепляются, соответственно, с верхним дистальным штифтовым отверстием в верхнем проксимально выступающем хвостовике 1356 и с верхним проксимальным штифтовым отверстием в верхнем дистально выступающем хвостовике 1256 на внешней гильзе 1250. Нижнее двухшарнирное звено 1366 включает в себя выступающие вниз дистальный и проксимальный шарнирные штифты, которые зацепляются, соответственно, с нижним дистальным штифтовым отверстием в нижнем проксимально выступающем хвостовике 1358 и с нижним проксимальным штифтовым отверстием в нижнем дистально выступающем хвостовике 1258.
В процессе применения узел закрывающей гильзы 1354 поступательно перемещают дистально (в направлении D) для закрытия упора 1310, например, в ответ на активацию закрывающего спускового механизма 1052. Упор 1310 закрывается путем поступательного перемещения дистально внешней гильзы 1250 и, таким образом, узла закрывающей гильзы стержня 1354, в результате чего он ударяется о проксимальную поверхность упора 1310 способом, описанным выше. Также, как было описано выше, упор 1310 открывается путем поступательного перемещения проксимально внешней гильзы 1250 и узла закрывающей гильзы стержня 1354, в результате чего язычок 1362 и подковообразное отверстие 1360 входят в контакт с язычком упора и толкают его, поднимая упор 1310. В положении с открытым упором узел закрывающей гильзы стержня 1352 перемещается в проксимальное положение.
По меньшей мере в одной форме сменный узел стержня 1200 дополнительно включает в себя пусковой элемент 1270, который поддерживается для осевого перемещения внутри рамы стержня 1212. Пусковой элемент 1270 включает в себя промежуточную часть пускового стержня 1272, выполненную с возможностью прикрепления к дистальной режущей части 1280. Также в настоящем документе пусковой элемент 1270 может называться «вторым стержнем» и/или «вторым узлом стержня». Как может быть показано на ФИГ. 37, промежуточная часть пускового стержня 1272 может включать в себя продольную прорезь 1274 в ее дистальном конце, которая может быть выполнена с возможностью принимать проксимальный конец 1282 дистальной режущей части 1280. Продольная прорезь 1274 и проксимальный конец 1282 могут быть выполнены по форме и размеру так, чтобы обеспечить относительное перемещение между ними, а также могут содержать скользящее сочленение 1276. Скользящее сочленение 1276 может обеспечивать перемещение промежуточной части пускового стержня 1272 пускового привода 1270 для перемещения так, чтобы обеспечить шарнирный поворот концевого эффектора 1300 без перемещения или по меньшей мере без перемещения по существу дистальной режущей части 1280. После того как концевой эффектор 1300 приобрел подходящую ориентацию, промежуточную часть пускового стержня 1272 можно продвигать дистально до тех пор, пока проксимальная боковая стенка продольной прорези 1272 не войдет в контакт с проксимальным концом 1282 для продвижения дистальной режущей части 1280 и не наложит скобы из кассеты, расположенной внутри канала 1302, как описано в настоящем документе. Как дополнительно показано на ФИГ. 37, рама стержня 1212 имеет удлиненное отверстие или окно 1213 в ней, упрощающее сборку и вставку промежуточной части пускового стержня 1272 в раму стержня 1212. После того как промежуточная часть пускового стержня 1272 была вставлена в нее, верхний сегмент рамы 1215 может зацепляться с рамой стержня 1212, заключая в нее промежуточную часть пускового стержня 1272 и дистальную режущую часть 1280. Также читатель отметит, что шарнирное сочленение 1350 может дополнительно включать в себя направляющую 1368, которая может быть выполнена с возможностью принимать в нее дистальную режущую часть 1280 пускового элемента 1270 и направлять дистальную режущую часть 1280 по мере ее продвижения дистально и/или оттягивания проксимально внутри и/или относительно шарнирного сочленения 1350.
Как может быть показано на ФИГ. 37, модуль крепления стержня 1220 может дополнительно включать в себя узел исполнительного механизма защелки 1230, который может съемно крепиться к модулю крепления стержня с помощью крепежных винтов (не показаны) или других подходящих крепежных элементов. Узел исполнительного механизма защелки 1230 выполнен с возможностью взаимодействовать с вилкой блокировки 1240, вращательно соединенной с модулем крепления стержня 1220 для обеспечения избирательного вращательного перемещения относительно него. См. ФИГ. 41. Как показано на ФИГ. 39, вилка блокировки 1240 может включать в себя два проксимально выступающих ушка блокировки 1242 (ФИГ. 37), выполненных с возможностью разъемного зацепления с соответствующими стопорами или канавками блокировки 1086, образованными в части модуля крепления рамы 1084 рамы 1080, как дополнительно будет более подробно описано ниже. Вилка блокировки 1240 имеет по существу U-образную форму и устанавливается поверх узла исполнительного механизма защелки 1230 после того, как узел исполнительного механизма защелки 1230 был соединен с модулем крепления стержня 1220. Узел исполнительного механизма защелки 1230 может иметь дугообразную часть корпуса 1234, обеспечивающую достаточный зазор для вилки блокировки 1240, которая может вращаться относительно нее между защелкнутым и незащелкнутым положениями.
В различных формах вилка блокировки 1240 смещается в проксимальном направлении с помощью пружины или смещающего элемента (не показан). Иначе говоря, вилка блокировки 1240 смещается в защелкнутое положение (ФИГ. 40) и может быть повернута в незащелкнутое положение (ФИГ. 41) с помощью кнопки защелки 1236, подвижно поддерживаемой на узле исполнительного механизма защелки 1230. По меньшей мере в одной конфигурации, например, кнопка защелки 1236 удерживается с возможностью скольжения внутри части кожуха защелки 1235 и смещается в проксимальном направлении P с помощью пружины защелки или смещающего элемента (не показан). Как дополнительно будет более подробно описано ниже, кнопка защелки 1236 имеет дистально выступающее высвобождающее ушко 1237, которое выполнено с возможностью зацепляться с вилкой блокировки 1240 и вращать ее из защелкнутого положения в незащелкнутое положение, показанное на ФИГ. 41, после активации кнопки защелки 1236.
Сменный узел стержня 1200 дополнительно может включать в себя узел форсунки 1290, вращательно поддерживаемый на модуле крепления стержня 1220. По меньшей мере в одной форме, например, узел форсунки 1290 может состоять из двух половин, или частей, форсунки 1292, 1294, которые могут быть взаимно соединены с помощью винтов, элементов защелки, адгезива и т.д. При монтаже на модуле крепления стержня 1220 узел форсунки 1290 может стыковаться с внешней гильзой 1250 и рамой стержня 1212, что позволяет врачу избирательно вращать стержень 1210 относительно модуля крепления стержня 1220 вокруг оси стержня SA-SA, которая, например, может быть определена как ось узла пускового элемента 1270. В частности, часть узла форсунки 1290 может проходить через окно 1253 во внешней гильзе и зацепляться с щелью 1218 в раме стержня 1212. См. ФИГ. 37. Таким образом, вращение узла форсунки 1290 приведет к вращению рамы стержня 1212 и внешней гильзы 1250 вокруг оси A-A относительно модуля крепления стержня 1220.
Читатель отметит, что, как показано на ФИГ. 42 и 43, часть модуля крепления рамы 1084 рамы 1080 образована двумя обращенными внутрь приемными прорезями типа «ласточкин хвост» 1088. Каждая приемная прорезь типа «ласточкин хвост» 1088 может быть конусообразной или, иначе говоря, несколько V-образной. См., например, ФИГ. 36 и 38 (показана только одна из прорезей 1088). Приемные прорези типа «ласточкин хвост» 1088 выполнены с возможностью разъемно принимать соответствующие конусообразные части крепления или части ушек 1229 проходящей проксимально части соединителя 1228 модуля крепления стержня 1220. Как дополнительно показано на ФИГ. 37-39, ушко крепления стержня 1278 образовано на проксимальном конце 1277 промежуточной части пускового стержня 1272. Как дополнительно будет более подробно описано ниже, когда сменный стержневой узел 1200 соединяется с рукояткой 1042, ушко крепления стержня 1278 принимается в ложе для крепления пускового стержня 1113, образованное на дистальном конце 1111 продольного приводного элемента 1110. Кроме того, направляющая траверса для крепления закрывающей трубки 1260 включает в себя проксимально проходящую часть направляющей траверсы 1265, которая включает в себя две захватывающие прорези 1267, открывающиеся вниз для захвата ушек крепления 1066 на закрывающей планке крепления 1064.
Прикрепление сменного узла стержня 1220 к рукоятке 1042 будет описано со ссылкой на ФИГ. 44-48. В различных формах рама 1080 или по меньшей мере одна из приводных систем образуют ось активации AA-AA. Например, ось активации AA-AA может быть образована осью выполненного с возможностью продольного перемещения приводного элемента 1110. По существу, когда промежуточный пусковой стержень 1272 функционально соединен с приводным элементом 1110, выполненным с возможностью продольного перемещения, ось активации AA-AA соосна оси стержня SA-SA, как показано на ФИГ. 48.
Чтобы начать процесс соединения, врач может разместить модуль крепления стержня 1220 сменного узла стержня 1200 поверх или смежно с частью модуля крепления 1084 рамы 1080 так, чтобы ушки крепления 1229, образованные на части соединителя 1228 модуля крепления стержня 1220, были совмещены с прорезями типа «ласточкин хвост» 1088 части модуля крепления 1084, как показано на ФИГ. 45. Затем врач может переместить модуль крепления стержня 1220 вдоль оси установки IA-IA, которая по существу поперечна оси активации AA-AA. Иными словами, модуль крепления стержня 1220 перемещают в направлении установки ID, по существу поперечном оси активации AA-AA, до тех пор, пока ушки крепления 1229 части соединителя 1228 не войдут в «функциональное зацепление» с соответствующими приемными прорезями типа «ласточкин хвост» 1088. См. ФИГ. 44 и 46. На ФИГ. 47 показано положение модуля крепления стержня 1220 до того, как ушко крепления стержня 1278 на промежуточном пусковом стержне 1272 вошло в ложе 1113 в выполненном с возможностью продольного перемещения приводном элементе 1110, и ушки крепления 1066 на закрывающей планке крепления 1064 вошли в соответствующие прорези 1267 в части направляющей траверсы 1265 направляющей траверсы для крепления закрывающей трубки 1260. На ФИГ. 48 показано положение модуля крепления стержня 1220 после завершения процесса прикрепления. Как может быть показано на этом чертеже, ушки 1066 (показано только одно) вошли в функциональное зацепление с соответствующими им прорезями 1267 в части направляющей траверсы 1265 направляющей траверсы для крепления закрывающей трубки 1260. При использовании в настоящем документе термин «функциональное зацепление» применительно к двум компонентам означает, что два компонента находятся в достаточном зацеплении друг с другом так, что после приложения к ним активирующего движения компоненты могут выполнять назначенное действие, функцию и/или процедуру.
Как описано выше и также показано на ФИГ. 44-49, по меньшей мере пять систем сменных узлов стержня 1200 могут быть функционально соединены по меньшей мере с пятью соответствующими системами рукоятки 1042. Первая система может содержать систему рамы, которая соединяет и/или совмещает раму узла стержня 1200 с рамой рукоятки 1042. Как кратко описано выше, часть соединителя 1228 узла стержня 1200 может зацепляться с частью модуля крепления 1084 рамы рукоятки 1080. Вторая система может содержать систему закрывающего привода, которая может функционально соединять закрывающий спусковой механизм 1052 рукоятки 1042 и закрывающую трубку 1250 и упором 1310 узла стержня 1200. Как кратко описано выше, направляющая траверса для крепления закрывающей трубки 1260 узла стержня 1200 может зацепляться с ушками крепления 1066 рукоятки 1042. Третья система может содержать систему пускового привода, которая может функционально соединять пусковой крючок 1120 рукоятки 1042 с промежуточным пусковым стержнем 1272 узла стержня 1200. Как кратко описано выше, ушко крепления стержня 1278 может быть функционально соединено с ложем 1113 продольного приводного элемента 1110. Четвертая система может содержать электрическую систему, которая может, во-первых, подавать сигнал контроллеру в рукоятке 1042, такому как микроконтроллер 7004, о том, что, например, узел стержня, такой как узел стержня 1200, функционально зацепляется с рукояткой 1042, и/или, во-вторых, подавать питание и/или сигналы связи между узлом стержня 1200 и рукояткой 1042. Например, узел стержня 1200 может включать в себя шесть электрических контактов, а электрический разъем 4000 также может включать в себя шесть электрических контактов, причем каждый электрический контакт узла стержня 1200 может быть спарен и может соединяться с электрическим контактом на электрическом разъеме 4000, когда узел стержня 1200 собран с рукояткой 1042. Узел стержня 1200 также может включать в себя защелку 1236, которая может представлять собой часть пятой системы, такой как система блокировки, которая может разъемно блокировать узел стержня 1200 к рукоятке 1042. В различных обстоятельствах защелка 1236 может замыкать цепь в рукоятке 1042, например, когда защелка 1236 зацеплена с рукояткой 1042.
В дополнение к указанному выше, система рамы, система закрывающего привода, система пускового привода и электрическая система узла стержня 1200 могут собираться с соответствующими системами рукоятки 1042 в поперечном направлении, т.е., например, вдоль оси IA-IA. В различных обстоятельствах система рамы, система закрывающего привода и система пускового привода узла стержня 1200 могут одновременно соединяться с соответствующими системами рукоятки 1042. В некоторых обстоятельствах две из системы рамы, системы закрывающего привода и системы пускового привода узла стержня 1200 могут одновременно соединяться с соответствующими системами рукоятки 1042. По меньшей мере в одной ситуации система рамы может по меньшей мере исходно соединяться до соединения системы закрывающего привода и системы пускового привода. В таких обстоятельствах система рамы может быть выполнена с возможностью совмещать соответствующие компоненты системы закрывающего привода и системы пускового привода до их соединения так, как кратко описано выше. В различных обстоятельствах части электрической системы узла кожуха 1200 и рукоятки 1042 могут быть выполнены с возможностью соединяться одновременно с окончательным, или полным, соединением системы рамы, системы закрывающего привода и/или системы пускового привода. В некоторых обстоятельствах части электрической системы узла кожуха 1200 и рукоятки 1042 могут быть выполнены с возможностью соединяться до окончательного, или полного, соединения системы рамы, системы закрывающего привода и/или системы пускового привода. В некоторых обстоятельствах части электрической системы узла кожуха 1200 и рукоятки 1042 могут быть выполнены с возможностью соединения после по меньшей мере частичного соединения системы рамы, но до соединения системы закрывающего привода и/или системы пускового привода. В различных обстоятельствах блокирующая система может быть выполнена так, что зацепление этой системы происходит в последнюю очередь, т.е. после зацепления всех из системы рамы, системы закрывающего привода, системы пускового привода и электрической системы.
Как кратко описано выше и также показано на ФИГ. 44-49, электрический разъем 4000 рукоятки 1042 может содержать множество электрических контактов. Как показано на ФИГ. 197, электрический разъем 4000, например, может содержать первый контакт 4001a, второй контакт 4001b, третий контакт 4001c, четвертый контакт 4001d, пятый контакт 4001e и шестой контакт 4001f. Несмотря на то, что в показанном варианте осуществления используются шесть контактов, предусмотрены другие варианты осуществления, в которых могут использоваться более шести контактов или менее шести контактов. Как показано на ФИГ. 197, первый контакт 4001a может находиться в электрической связи с транзистором 4008, контакты 4001b-4001e могут находиться в электрической связи с микроконтроллером 7004, а шестой контакт 4001f может находиться в электрической связи с землей. Микроконтроллер 7004 дополнительно описан ниже более подробно. В некоторых обстоятельствах один или более электрических контактов 4001b-4001e могут находиться в электрической связи с одним или более выходными каналами микроконтроллера 7004, и на них может подаваться питание или к ним может прилагаться потенциал, когда рукоятка 1042 находится в состоянии с электропитанием. В некоторых обстоятельствах один или более электрических контактов 4001b-4001e могут находиться в электрической связи с одним или более входными каналами микроконтроллера 7004, и, когда рукоятка 1042 находится в состоянии с электропитанием, микроконтроллер 7004 может быть выполнен с возможностью обнаруживать приложение потенциала к таким электрическим контактам. Когда узел стержня, например, такой как узел стержня 1200, собирается с рукояткой 1042, электрические контакты 4001a-4001f могут быть не связаны друг с другом. Однако когда узел стержня не собран с рукояткой 1042, электрические контакты 4001a-4001f электрического разъема 4000 могут быть открыты, и в некоторых обстоятельствах один или более контактов 4001a-4001f могут случайно войти в электрическое соединение друг с другом. Такие ситуации могут быть возможны, например, когда один или более контактов 4001a-4001f входят в контакт с электропроводным материалом. В этом случае микроконтроллер 7004, например, может получить ошибочный входной сигнал, и/или узел стержня 1200 может получить ошибочный выходной сигнал. Для решения этой проблемы в различных обстоятельствах рукоятка 1042 может быть отключена от питания, когда узел стержня, например, такой как узел стержня 1200, не прикреплен к рукоятке 1042. В других обстоятельствах рукоятка 1042 может быть подключена к питанию, когда узел стержня, например, такой как узел стержня 1200, не прикреплен к ней. В таких обстоятельствах микроконтроллер 7004 может быть выполнен с возможностью игнорировать входные сигналы или потенциалы, приложенные к контактам, находящимся в электрической связи с микроконтроллером 7004, т.е. контактам 4001b-4001e, например, до тех пор, пока узел стержня не будет прикреплен к рукоятке 1042. Хотя в таких обстоятельствах на микроконтроллер 7004 может подаваться питание для работы других функций рукоятки 1042, рукоятка 1042 может находиться в состоянии с отключенным питанием. В некотором смысле электрический разъем 4000 может находиться в состоянии с отключенным питанием, так как потенциалы, приложенные к электрическим контактам 4001b-4001e, не могут влиять на работу рукоятки 1042. Читателю будет понятно, что хотя контакты 4001b-4001e могут находиться в состоянии с отключенным питанием, электрические контакты 4001a и 4001f, которые не находятся в электрической связи с микроконтроллером 7004, могут находиться или могут не находиться в состоянии с отключенным питанием. Например, шестой контакт 4001f может оставаться в электрической связи с землей независимо от того, находится ли рукоятка 1042 в состоянии с включенным или с отключенным питанием. Более того, транзистор 4008 и/или любая другая подходящая конфигурация транзисторов, например, такая как транзистор 4010, и/или переключателей может быть выполнена с возможностью управлять подачей питания от источника питания 4004, например, такого как батарея 1104 внутри рукоятки 1042, к первому электрическому контакту 4001a, независимо от того, находится ли рукоятка 1042 в состоянии с включенным или отключенным питанием, как кратко описано выше. В различных обстоятельствах защелка 1236 узла стержня 1200, например, может быть выполнена с возможностью изменять состояние транзистора 4008, когда защелка 1236 зацепляется с рукояткой 1042. В различных обстоятельствах, как описано в другом месте настоящего документа, защелка 1236 может быть выполнена с возможностью замыкать цепь, когда она находится в зацеплении с рукояткой 1042 и в результате может влиять на состояние транзистора 4008. В некоторых обстоятельствах, в дополнение к указанному ниже, датчик Холла 4002 может быть выполнен с возможностью переключать состояние транзистора 4010, который в результате может переключать состояние транзистора 4008 и, в конечном итоге, подавать питание от источника питания 4004 на первый контакт 4001a. Таким образом, в дополнение к указанному выше, как цепи питания, так и сигнальные цепи разъема 4000 могут быть обесточены, когда узел стержня не установлен в рукоятку 1042, и могут получать питание, когда узел стержня установлен в рукоятку 1042.
В различных обстоятельствах, как показано на ФИГ. 197, рукоятка 1042 может включать в себя, например, датчик Холла 4002, который может быть выполнен с возможностью обнаруживать обнаружимый элемент, например, такой как магнитный элемент, на узле стержня, например, таком как узел стержня 1200, когда узел стержня соединен с рукояткой 1042. Датчик Холла 4002 может получать питание от источника питания 4006, например, такого как батарея, которое в результате может усиливать сигнал обнаружения от датчика Холла 4002 и связываться с входным каналом микроконтроллера 7004 через цепь, показанную на ФИГ. 197. После того как микроконтроллер 7004 получил входной сигнал, указывающий на то, что узел стержня был по меньшей мере частично соединен с рукояткой 1042 и, что в результате этого электрические контакты 4001a-4001f более не открыты, микроконтроллер 7004 может войти в его нормальное рабочее состояние с питанием. В таком рабочем состоянии микроконтроллер 7004 будет оценивать сигналы, передаваемые на один или более контактов 4001b-4001e от узла стержня, и/или передавать сигналы к узлу стержня через один или более контактов 4001b-4001e в процессе его обычного применения. В различных обстоятельствах может потребоваться, чтобы узел стержня 1200 был полностью установлен, прежде чем датчик Холла 4002 сможет обнаружить магнитный элемент. Несмотря на то, что датчик Холла 4002 можно использовать для обнаружения наличия узла стержня 1200, для обнаружения того, был ли узел стержня 1042 собран с рукояткой, можно использовать любую подходящую систему датчиков и/или переключателей. Таким образом, в дополнение к указанному выше, как цепи питания, так и сигнальные цепи разъема 4000 могут быть обесточены, когда узел стержня не установлен в рукоятку 1042, и могут получать питание, когда узел стержня установлен в рукоятку 1042.
В различных вариантах осуществления для обнаружения, например, того, что узел стержня был собран с рукояткой 1042, можно использовать любое количество магнитных сенсорных элементов. Например, технологии, применяемые для обнаружения магнитного поля, включают в себя, помимо прочего, индукционную катушку, магнитный датчик с оптической накачкой, ядерную прецессию, сверхпроводящий магнитометр (SQUID), эффект Холла, анизотропное магнитосопротивление, гигантское магнитосопротивление, магнитные туннельные переходы, гигантский магнитоимпеданс, магнитострикционные/пьезоэлектрические композиты, магнитодиод, магнитотранзистор, оптоволокно, магнитооптические датчики и магнитные датчики на основе микроэлектромеханических систем.
После функционального соединения сменного узла стержня 1200 с рукояткой 1042 активация закрывающего спускового механизма 1052 приведет к дистальному осевому продвижению внешней гильзы 1250 и соединенного с ним узла закрывающей гильзы стержня 1354 для активации упора 1310 различными способами, раскрытыми в настоящем документе. Как также показано на ФИГ. 48, пусковой элемент 1270 в сменном узле стержня 1200 соединен с выполненным с возможностью продольного перемещения приводным элементом 1110 в рукоятке 1042. Более конкретно ушко крепления стержня 1278, образованное на проксимальном конце 1277 промежуточного пускового стержня 1272, принимается внутрь ложа для крепления пускового стержня 1113, образованного в дистальном конце 1111 выполненного с возможностью продольного перемещения приводного элемента 1110. Таким образом, активация пускового крючка 1120, которая приводит к подаче питания на двигатель 1102 для аксиального продвижения выполненного с возможностью продольного перемещения приводного элемента 1110, также приведет к тому, что пусковой элемент 1270 будет аксиально перемещаться внутри рамы стержня 1212. Такое действие приведет к продвижению дистальной режущей части 1280 через ткань, зажатую в концевом эффекторе 1300, различными способами, раскрытыми в настоящем документе. Хотя это и не видно на ФИГ. 48, обычному специалисту в данной области также будет понятно, что в соединенном положении, показанном на этом чертеже, части ушек крепления 1229 модуля крепления стержня 1220 входят внутрь их соответствующих приемных прорезей типа «ласточкин хвост» 1088 в части модуля крепления 1084 рамы 1080. Таким образом, модуль крепления стержня 1220 соединен с рамой 1080. В дополнение к этому, хотя это и не показано на ФИГ. 48 (но показано на ФИГ. 40), когда модуль крепления стержня 1220 соединен с рамой 1080, ушки блокировки 1242 на вилке блокировки 1240 входят в их соответствующие канавки блокировки 1086 (на ФИГ. 40 показана только одна) в части модуля крепления 1084 рамы 1080, разъемно удерживая модуль крепления стержня 1220 в функциональном зацеплении с рамой 1080.
Чтобы отсоединить сменный узел стержня 1220 от рамы 1080, врач нажимает кнопку защелки 1236 в дистальном направлении D, в результате чего вилка блокировки 1240 вращается, как показано на ФИГ. 41. Такое вращательное перемещение вилки блокировки 1240 приводит к тому, что ушки блокировки 1242 на ней перемещаются из удерживающего зацепления с канавками блокировки 1086. Затем врач может переместить модуль крепления стержня 1220 от рукоятки в направлении отсоединения DD, как показано на ФИГ. 49.
Обычному специалисту в данной области будет понятно, что модуль крепления стержня 1220 также может удерживаться неподвижным, а рукоятку 1042 можно перемещать вдоль оси установки IA-IA, по существу поперечной оси стержня SA-SA, вводя ушки 1229 на части соединителя 1228 в опорное зацепление с прорезями типа «ласточкин хвост» 1088. Дополнительно будет понятно, что модуль крепления стержня 1220 и рукоятку 1042 можно одновременно перемещать в направлении друг к другу вдоль оси установки IA-IA, по существу поперечной оси стержня SA-SA и оси активации AA-AA.
При использовании в настоящем документе фраза «по существу поперечно оси активации и/или оси стержня» означает направление, которое близко к перпендикуляру к оси активации и/или оси стержня. Однако следует понимать, что направления, которые несколько отличаются от перпендикуляра к оси активации и/или оси стержня, также по существу поперечны этим осям.
На ФИГ. 50-57 показана другая конфигурация для соединения сменного узла стержня 1600 с рамой 1480 рукоятки (не показана), которая в ином случае функционирует как рукоятка 1042, подробно описанная в настоящем документе. Таким образом, дополнительно будет подробно представлена только та информация, которая необходима для понимания уникальных и инновационных соединительных элементов узла стержня 1600. Однако обычному специалисту в данной области будет понятно, что рама может поддерживаться внутри кожуха роботизированной системы, которая в ином случае функционально поддерживает или вмещает множество приводных систем. В других конфигурациях рама может содержать часть роботизированной системы для функционального прикрепления к ней сменных узлов стержня.
По меньшей мере в одной форме узел стержня 1600 включает в себя стержень 1610, который может включать в себя все другие компоненты стержня 1210, описанные выше, и может иметь концевой эффектор (не показан) описанного выше типа, функционально прикрепленный к нему. Как показано на ФИГ. 57, в показанной на фигуре конфигурации узел стержня 1600 включает в себя направляющую траверсу для крепления закрывающей трубки 1660, которая может вращательно соединяться с внешней гильзой 1650 таким способом, в котором узел направляющей траверсы закрывающей трубки 1260 вращательно соединен с внешней гильзой 1250.
В различных формах узел стержня 1600 включает в себя модуль крепления стержня или часть крепления стержня 1620, имеющую открытый низ 1621. Стержень 1610 соединяется с модулем крепления стержня 1620 путем вставки проксимального конца стержня 1610 через отверстие 1622 в модуле крепления стержня 1620. Направляющая траверса для крепления закрывающей трубки 1660 может вставляться в модуль крепления стержня 1620 через открытую нижнюю часть 1621 так, что проксимальный конец 1652 внешней гильзы 1650 принимается внутрь ложа 1662 направляющей траверсы для крепления закрывающей трубки 1660. В соответствии с описанным выше способом, U-образный соединитель 1666 проходит через прорезь 1624 в модуле крепления стержня 1620 и входит в зацепление с кольцевым пазом 1654 в проксимальном конце 1652 внешней гильзы 1250 и прорезями 1664 в направляющей траверсе для крепления закрывающей трубки 1660 для прикрепления внешней гильзы 1650 к направляющей траверсе для крепления закрывающей трубки 1660. Как было описано выше, такая конфигурация позволяет внешней гильзе 1650 вращаться относительно модуля крепления стержня 1620.
По меньшей мере в одной форме направляющая траверса для крепления закрывающей трубки 1660 выполнена с возможностью поддержки внутри модуля крепления стержня 1620 так, что направляющая траверса для крепления закрывающей трубки направляющей траверсы 1660 может перемещаться аксиально в нем в дистальном и проксимальном направлениях. По меньшей мере в одной форме внутри модуля крепления стержня предусмотрена закрывающая пружина 1625 для смещения узла направляющей траверсы закрывающей трубки 1660 в проксимальном направлении P. См. ФИГ. 57. Как и в случае описанного выше узла стержня 1210, проксимальный конец 1614 рамы стержня 1612 выступает проксимально из проксимального конца 1652 внешней гильзы 1650. Как может быть показано на ФИГ. 57, на проксимальном конце 1614 рамы стержня 1612 может быть образовано удерживающее кольцо 1617. U-образный элемент ограничителя 1627 вставляют через латеральную прорезь 1633 в модуле крепления стержня 1620, удерживая проксимальный конец 1652 внешней гильзы в этом осевом положении, одновременно позволяя внешней гильзе 1650 вращаться относительно модуля крепления стержня 1620. Такая конфигурация позволяет врачу вращать стержень 1610 вокруг оси стержня SA-SA относительно модуля крепления стержня 1620. Обычному специалисту в данной области будет понятно, что стержень 1610 может вращаться при помощи такого же или аналогичного механизма форсунки, как описано выше. Например, части форсунки (не показаны) могут быть собраны вокруг внешней гильзы 1650 и входить в зацепление с щелью 1618 в раме стержня 1612 через окно 1653 во внешней гильзе 1650. См. ФИГ. 53.
По меньшей мере в одной форме рама 1480 имеет модуль крепления рамы или часть крепления рамы 1484, образованную на ней или прикрепленную к ней. Модуль крепления рамы 1484 может быть образован с противоположными приемными прорезями типа «ласточкин хвост» 1488. Каждая приемная прорезь типа «ласточкин хвост» 1488 может быть конусообразной или, иначе говоря, несколько V-образной. Прорези 1488 выполнены с возможностью разъемно принимать соответствующую часть соединителя типа «ласточкин хвост» 1629, выступающего из проксимального конца модуля крепления стержня 1620. Как может быть показано на ФИГ. 52, проксимальный конец 1677 промежуточного пускового стержня 1672 выступает проксимально из модуля крепления стержня 1620, и на нем образовано ушко крепления стержня 1678. Проксимальный конец 1677 промежуточного пускового стержня 1672 может проходить через пространство между торцевыми стенками 1485 модуля крепления рамы 1484, что позволяет принимать образованное на нем ушко для крепления стержня 1678 в ложе для крепления пускового стержня 1513, образованное в дистальном конце 1511 продольно перемещаемого приводного элемента 1510. См. ФИГ. 57. Когда сменный узел стержня 1600 соединен с рукояткой, или кожухом, или рамой хирургического инструмента, устройством, роботизированной системой и т.д., ушко крепления стержня 1678 принимается в ложе для крепления пускового стержня 1513, образованное в дистальном конце 1511 выполненного с возможностью продольного перемещения приводного элемента 1510.
Как также показано на ФИГ. 52-55, модуль крепления рамы 1484 может иметь выступающий дистально нижний элемент 1490, приспособленный для заключения по меньшей мере части открытого низа 1621 модуля крепления стержня 1620, когда модуль крепления стержня 1620 функционально соединен с модулем крепления рамы 1484. В одной форме направляющая траверса для крепления закрывающей трубки 1660 имеет пару проксимально выступающих из нее и расположенных на расстоянии плеч направляющей траверсы 1661. Между ними может проходить поперечный крепежный штифт направляющей траверсы 1663. См. ФИГ. 57. Когда модуль крепления стержня 1620 входит в функциональное зацепление с модулем крепления рамы 1484, крепежный штифт направляющей траверсы 1663 выполнен с возможностью зацепления его крюком 1469, образованным на закрывающем звене 1467 системы закрывающего привода 1450. Система закрывающего привода 1450 может быть аналогична описанной выше системе закрывающего привода 1050 и может включать в себя закрывающий спусковой механизм 1452 и узел закрывающего звена 1460. Узел закрывающего звена 1460 может включать в себя закрывающее звено 1462, вращательно соединенное с закрывающей планкой крепления 1464. Закрывающая планка крепления 1464 вращательно соединена с закрывающим звеном 1467. См. ФИГ. 54.
Способ соединения узла стержня 1600 с рамой 1480 может быть понятен со ссылкой на ФИГ. 53 и 54. Как и в других конфигурациях, раскрытых в настоящем документе, узел стержня 1600 может образовывать ось стержня SA-SA, а рама 1480 может образовывать ось активации AA-AA. Например, ось стержня SA-SA может быть образована пусковым элементом 1670, а ось активации AA-AA может быть образована выполненным с возможностью продольного перемещения приводным элементом 1510. Чтобы начать процесс соединения, врач может расположить модуль крепления стержня 1620 сменного узла стержня 1600 поверх или смежно с модулем крепления рамы 1484 рамы 1480 так, чтобы соединитель типа «ласточкин хвост» 1629 модуля крепления стержня 1620 был совмещен с прорезями типа «ласточкин хвост» 1488 в модуле крепления стержня 1484, как показано на ФИГ. 53. Затем врач может переместить модуль крепления стержня 1620 вдоль оси установки IA-IA, которая по существу поперечна оси активации AA-AA. Иными словами, модуль крепления стержня 1620 перемещают в направлении установки ID, по существу поперечном оси активации AA-AA, до тех пор, пока соединитель типа «ласточкин хвост» 1629 не войдет в прорези типа «ласточкин хвост» 1488 в модуле рамы 1484. См. ФИГ. 55-57. Когда модуль крепления стержня 1620 функционально зацеплен с модулем крепления рамы 1484, направляющая траверса для крепления закрывающей трубки 1665 будет входить в функциональное зацепление с системой закрывающего привода 1450, а активация закрывающего спускового механизма 1452 будет приводить к дистальному осевому продвижению внешней гильзы 1650 и соединенного с ней узла закрывающей трубки стержня для активации упора различными способами, раскрытыми в настоящем документе. Аналогичным образом, пусковой элемент 1270 будет функционально зацепляться с выполненным с возможностью продольного перемещения приводным элементом 1510. См. ФИГ. 57. Таким образом, активация двигателя (не показан) системы пускового привода 1500 приведет к осевому продвижению выполненного с возможностью продольного перемещения приводного элемента 1510, а также пускового элемента 1670. Такое действие приведет к продвижению дистальной режущей части пускового элемента (не показан) через ткань, зажатую в концевом эффекторе, различными способами, раскрытыми в настоящем документе.
На ФИГ. 58-62 показана другая конфигурация для соединения сменного узла стержня 1900 с рамой 1780 рукоятки (не показана), которая в ином случае функционирует как рукоятка 1042, подробно описанная в настоящем документе. Таким образом, подробно будет представлена только та информация, которая необходима для понимания уникальных и инновационных соединительных элементов узла стержня 1900. Однако обычному специалисту в данной области будет понятно, что рама может поддерживаться внутри кожуха или другой части роботизированной системы, которая в ином случае функционально поддерживает или вмещает множество приводных систем. В других конфигурациях рама может содержать часть роботизированной системы для функционального прикрепления к ней сменных узлов стержня.
По меньшей мере в одной форме узел стержня 1900 включает в себя стержень 1910, который может включать в себя все другие компоненты стержня 1210, описанные выше и может иметь концевой эффектор (не показан), например, описанного выше типа, функционально прикрепленный к нему. Как показано на ФИГ. 62, в показанной конфигурации узел стержня 1900 включает в себя направляющую траверсу для крепления закрывающей трубки 1960, которая может вращательно соединяться с внешней гильзой 1950 таким способом, в котором узел направляющей траверсы закрывающей трубки 1260 вращательно соединен с внешней гильзой 1250.
В различных формах узел стержня 1900 может включать в себя модуль крепления стержня или часть крепления стержня 1920, имеющую открытый низ 1921. Стержень 1910 соединяется с модулем крепления стержня 1920 путем вставки проксимального конца стержня 1910 через отверстие 1922 в модуле крепления стержня 1920. Направляющая траверса для крепления закрывающей трубки 1960 может вставляться в модуль крепления стержня 1920 через открытую нижнюю часть 1921 так, что проксимальный конец 1952 внешней гильзы 1950 принимается внутрь ложа 1962 направляющей траверсы для крепления закрывающей трубки 1660. В соответствии с описанным выше способом U-образный соединитель 1966 зацепляет кольцевой паз (не показан) в проксимальном конце 1952 внешней гильзы 1950 и прорези 1964 в направляющей траверсе для крепления закрывающей трубки 1960 для прикрепления внешней гильзы 1950 к направляющей траверсе для крепления закрывающей трубки 1960. Как было описано выше, такая конфигурация позволяет внешней гильзе 1950 вращаться относительно модуля крепления стержня 1920.
По меньшей мере в одной форме направляющая траверса для крепления закрывающей трубки 1960 выполнена с возможностью поддерживаться внутри модуля крепления стержня 1920 так, что узел направляющей траверсы закрывающей трубки 1960 может перемещаться аксиально в нем в дистальном (D) и проксимальном (P) направлениях. Как и в случае с описанным выше узлом стержня 1210, проксимальный конец рамы стержня выступает проксимально из проксимального конца 1952 внешней гильзы 1950. Как может быть показано на ФИГ. 62, на проксимальном конце рамы стержня может быть образовано удерживающее кольцо 1917. U-образный элемент ограничителя 1927 может применяться для удержания проксимального конца рамы стержня в таком осевом положении, которое позволяет раме стержня вращаться относительно модуля крепления стержня 1920. Такая конфигурация позволяет врачу вращать стержень 1910 вокруг оси стержня SA-SA относительно модуля крепления стержня 1920. Узел форсунки 1990 может применяться различными способами, описанными в настоящем документе, для облегчения вращения стержня 1910 относительно модуля крепления стержня 1920.
Сменный узел стержня 1900 дополнительно может включать в себя узел форсунки 1990, поворотно поддерживаемый на модуле крепления стержня 1920. По меньшей мере в одной форме, например, узел форсунки 1990 может состоять из двух половин, или частей, форсунки, которые могут быть взаимно соединены с помощью винтов, элементов защелки, адгезива и т.д. При монтаже на модуле крепления стержня 1920 узел форсунки 1990 может стыковаться с адаптером поворота стержня 1995, который выполнен с возможностью зацепляться с внешней гильзой 1950 и рамой стержня 1912, что позволяет врачу избирательно поворачивать стержень 1910 относительно модуля крепления стержня 1920 вокруг оси стержня SA-SA, которая, например, может быть образована как ось узла пускового элемента. Таким образом, поворот узла форсунки 1990 приведет к повороту рамы стержня и внешней гильзы 1950 вокруг оси A-A относительно модуля крепления стержня 1920.
По меньшей мере в одной форме рама 1780 имеет модуль крепления рамы или часть крепления рамы 1784, образованную на ней или прикрепленную к ней. Модуль крепления рамы 1784 может быть образован с обращенными наружу приемными прорезями типа «ласточкин хвост» 1788. Каждая приемная прорезь типа «ласточкин хвост» 1788 может быть конусообразной или, иначе говоря, несколько V-образной. См. ФИГ. 60. Прорези 1788 выполнены с возможностью разъемно функционально зацеплять соответствующие обращенные внутрь части соединителя типа «ласточкин хвост» 1929, образованные на модуле крепления стержня 1920. Как может быть показано на ФИГ. 60, проксимальный конец 1977 промежуточного пускового стержня 1972 выступает проксимально из модуля крепления стержня 1920, и на нем образовано ушко крепления стержня 1978. Ушко крепления стержня 1978 выполнено с возможностью приема в ложе крепления пускового стержня 1813, образованное в дистальном конце 1811 продольно перемещаемого приводного элемента 1810. См. ФИГ. 62. Когда сменный узел стержня 1900 находится в функциональном зацеплении с рамой, или кожухом хирургического инструмента, устройством, роботизированной системой и т.д., ушко крепления стержня 1978 принимается в функциональное зацепление с ложем для крепления пускового стержня 1813, образованным в дистальном конце 1811 продольного приводного элемента 1810.
По меньшей мере в одной форме направляющая траверса для крепления закрывающей трубки 1960 имеет проксимально выступающее из него плечо направляющей траверсы 1961, которая имеет открытый вниз крюк 1963, образованный на ней для зацепления с ушком крепления 1766, образованным на закрывающей планке крепления 1764 системы закрывающего привода 1750. См. ФИГ. 62. Когда модуль крепления стержня 1920 вводят в соединяющее зацепление с модулем крепления рамы 1784, ушко крепления 1766 зацепляется крюком 1963, образованным на плече направляющей траверсы закрывающей трубки 1961. Система закрывающего привода 1750 может быть аналогична описанной выше системе закрывающего привода 1050 и может включать в себя закрывающий спусковой механизм 1752 и узел закрывающего звена 1760. Узел закрывающего звена 1760 может включать в себя закрывающее звено 1762, вращательно соединенное с закрывающей планкой крепления 1764. См. ФИГ. 62. Активация закрывающего спускового механизма 1752 приведет к осевому перемещению закрывающей планки крепления 1764 в дистальном направлении D.
Как и в других конфигурациях, раскрытых в настоящем документе, узел стержня 1900 может образовывать ось стержня SA-SA, а рама 1780 может образовывать ось активации AA-AA. Например, ось стержня SA-SA может быть образована пусковым элементом 1970, а ось активации AA-AA может быть образована выполненным с возможностью продольного перемещения приводным элементом 1810, функционально поддерживаемым рамой 1780. Чтобы начать процесс соединения, врач может расположить модуль крепления стержня 1920 сменного узла стержня 1900 поверх или смежно с модулем крепления рамы 1784 рамы 1780 так, чтобы каждая из частей соединителя типа «ласточкин хвост» 1929 модуля крепления стержня 1920 была совмещена с соответствующей ей прорезью типа «ласточкин хвост» 1788 в модуле крепления рамы 1784. Затем врач может переместить модуль крепления стержня 1920 вдоль оси установки, которая по существу поперечна оси активации AA-AA. Иными словами, модуль крепления стержня 1920 перемещают в направлении установки, которое по существу поперечно оси активации AA-AA до тех пор, пока соединители типа «ласточкин хвост» 1929 не войдут в функциональное зацепление с соответствующей им прорезью типа «ласточкин хвост» 1788 в модуле рамы 1784. Когда модуль крепления стержня 1920 прикреплен к модулю крепления рамы 1784, направляющая траверса для крепления закрывающей трубки 1960 функционально соединяется с системой закрывающего привода 1750, а активация закрывающего спускового механизма 1752 приводит к дистальному осевому продвижению внешней гильзы 1950 и соединенного с ней узла закрывающей трубки стержня и активации упора различными способами, раскрытыми в настоящем документе. Аналогичным образом, пусковой элемент будет соединяться в функциональном зацеплении с выполненным с возможностью продольного перемещения приводным элементом 1810. См. ФИГ. 62. Таким образом, активация двигателя (не показан) системы пускового привода 1800 приведет к осевому продвижению выполненного с возможностью продольного перемещения приводного элемента 1810, а также пускового элемента 1970. Такое действие приведет к продвижению дистальной режущей части пускового элемента (не показан) через ткань, зажатую в концевом эффекторе, различными способами, раскрытыми в настоящем документе.
На ФИГ. 63-66 показана другая конфигурация для соединения сменного узла стержня 2200 с рамой 2080 рукоятки (не показана), которая может функционировать как рукоятка 1042, подробно описанная в настоящем документе. Таким образом, подробно будет представлена только та информация, которая необходима для понимания уникальных и инновационных соединительных элементов узла стержня 2200. Однако обычному специалисту в данной области будет понятно, что рама может поддерживаться внутри кожуха или другой части роботизированной системы, которая в ином случае функционально поддерживает или вмещает множество приводных систем. В других конфигурациях рама может содержать часть роботизированной системы для функционального прикрепления к ней сменных узлов стержня.
По меньшей мере в одной форме узел стержня 2200 включает в себя стержень 2210, который может включать в себя все другие компоненты стержня 1210, описанные выше, и может иметь концевой эффектор (не показан) описанного выше типа, функционально прикрепленный к нему. Различные конструкции и варианты работы этих элементов описаны выше. В показанной конфигурации узел стержня 2200 включает в себя направляющую траверсу для крепления закрывающей трубки 2260, которая может поворотно соединяться с внешней гильзой 2250 таким способом, в котором направляющая траверса для крепления направляющей траверсы закрывающей трубки 1260 поворотно соединена с внешней гильзой 1250. Однако узел стержня 2200 не включает в себя модуль крепления стержня, как было описано выше.
Как может быть показано на ФИГ. 63-65, рама 2080 может быть образована в виде первой части рамы 2080A и второй части рамы 2080B. В тех сферах применения, в которых рама 2080 применяется с рукояткой, каждая из первой и второй частей рамы 2080A и 2080B может быть связана с частью кожуха рукоятки. Таким образом, когда врачу необходимо прикрепить другой узел стержня 2200, врачу может потребоваться отсоединить друг от друга части кожуха рукоятки. В таких конфигурациях, например, части кожуха могут быть соединены вместе с помощью съемных крепежных элементов или других механизмов, которые способствуют простому отсоединению частей кожуха. В других вариантах осуществления узел стержня 2200 может быть выполнен с возможностью однократного применения. В показанной конфигурации первая часть рамы 2080A может функционально поддерживать в ней различные приводные системы, а вторая часть рамы 2080B может содержать часть рамы, которая удерживает различные компоненты узла стержня 2200 в функциональном зацеплении с соответствующими им компонентами приводной системы, поддерживаемыми в первой части рамы 2080A.
По меньшей мере в одной форме направляющая траверса для крепления закрывающей трубки 2260 выполнена с возможностью поддержки внутри хода 2081 в раме 2080 так, что направляющая траверса для крепления закрывающей трубки 2260 может аксиально перемещаться в нем в дистальном и проксимальном направлениях. Как и в случае описанного выше узла стержня 1210, проксимальный конец 2214 рамы стержня 2212 проксимально выступает из проксимального конца 2252 внешней гильзы 2250. Как может быть показано на ФИГ. 63, на проксимальном конце 2214 рамы стержня 2212 может быть образовано удерживающее кольцо 2217. Удерживающее кольцо 2217 может быть приспособлено для поворотного приема внутрь кольцевого паза 2083, образованного в раме 2080. Такая конфигурация служит для функционального соединения рамы стержня 2212 с рамой 2080 для предотвращения какого-либо относительного осевого перемещения между этими компонентами, обеспечивая возможность поворота рамы стержня 2212 относительно рамы 2080. Такая конфигурация дополнительно позволяет врачу поворачивать стержень 2210 вокруг оси стержня SA-SA относительно рамы. Обычному специалисту в данной области будет очевидно, что описанный выше механизм форсунки можно применять для поворота стержня 2210 вокруг оси стержня SA-SA относительно рамы 2080. Например, части форсунки (не показаны) могут быть собраны вокруг внешней гильзы 2250 и зацеплены с щелью 2218 в раме стержня 2212 через окно 2253 во внешней гильзе 2250. См. ФИГ. 64.
Как дополнительно показано на ФИГ. 64, проксимальный конец 2277 промежуточного пускового стержня 2272 проксимально выступает из проксимального конца 2214 рамы стержня 2212, и на нем образовано ушко крепления стержня 2278. Ложе крепления пускового стержня 2113, образованное в дистальном конце 2111 продольно перемещаемого приводного элемента 2110, образовано для возможности загрузки с ушка крепления пускового стержня 2278 этой стороны. Чтобы помочь врачу совместить компоненты узла стержня 2220 и первую и вторую части рамы 2080A и 2080B во время сборки, на второй части рамы 2080B могут быть предусмотрены ушки 2090, выполненные с возможностью приема в соответствующие отверстия или карманы 2091, образованные в первой части рамы 2080A, и наоборот. В таких сферах однократного применения, в которых нежелательно иметь возможность отсоединять узел стержня 2200 от рамы 2080, карманы 2090 могут быть выполнены с возможностью постоянно захватывать или зацеплять вставленные в них ушки 2090.
Первая часть рамы 2080A и/или выполненный с возможностью продольного перемещения приводной элемент 2110, подвижно поддерживаемый первой частью рамы 2080A, может образовывать ось активации A-A, а узел стержня 2200 образует ось стержня SA-SA. Как может быть показано на ФИГ. 64, чтобы начать процесс соединения, узел стержня 2200 и первую часть рамы 2080A можно ориентировать относительно друг друга так, чтобы ось стержня SA-SA была по существу параллельна оси активации AA-AA, и так, чтобы кольцо 2217 было латерально совмещено вдоль оси установки IA, то есть по существу поперечен оси активации, причем кольцевой паз 2083 и ушко крепления стержня 2278 латерально совмещены вдоль другой оси установки IA-IA, которая также по существу поперечна оси активации AA-AA. Затем узел стержня 2200 перемещают в направлении установки ID, по существу поперечном оси активации AA-AA, до тех пор, пока направляющая траверса для крепления закрывающей трубки 2260 не войдет в часть хода 2081, образованного в первой части рамы 2080A, кольцо 2217 не войдет внутрь части кольцевого паза 2083, образованного в первой части рамы 2080А, а ушко крепления стержня 2278 не войдет в ложе крепления стержня 2113, образованное в выполненном с возможностью продольного перемещения приводном элементе 2110. В другой конфигурации узел стержня 2200 и первую часть рамы 2080A можно свести вместе аналогичным способом, удерживая узел стержня 2200 неподвижно и перемещая первую часть рамы 2080A в направлении узла рукоятки 2200 до тех пор, пока описанные выше части компонентов не войдут в функциональное соединение вместе, или каждый из узла рукоятки 2200 и первой части рамы 2080A можно перемещать одновременно в направлении друг друга до тех пор, пока они не войдут в соединение вместе. После того как узел рукоятки 2200 функционально вошел внутрь первой части рамы 2080A, как показано на ФИГ. 63, вторую часть рамы 2080B можно соединить с первой частью рамы 2080A путем совмещения штырей 2090 с соответствующими им отверстиями или карманами 2091 и соединения компонентов вместе. Первая и вторая части рамы 2080A и 2080B могут удерживаться вместе с помощью крепежных элементов (например, винтов, болтов и т.д.), адгезива и/или элементов защелки. В других конфигурациях первая часть рамы 2080A и вторая часть рамы 2080B могут удерживаться вместе в соединительном зацеплении, когда соответствующие им сегменты кожуха соединяются вместе.
После того как первая и вторая части рамы 2080A, 2080B были соединены вместе, как показано на ФИГ. 65 и 66, затем врач может соединить систему закрывающего привода 2050 и направляющую траверсу для крепления закрывающей трубки 2260. Система закрывающего привода 2050 может быть аналогична описанной выше системе закрывающего привода 1050 и может включать в себя закрывающий спусковой механизм 2052 и узел закрывающего звена 2060. Узел закрывающего звена может включать в себя закрывающее звено 2062, вращательно соединенное с закрывающей планкой крепления 2064. В дополнение к этому другое закрывающее звено 2067 вращательно соединено с закрывающей планкой крепления 2064. Закрывающее звено 2067 может быть выполнено с возможностью вращательного прикрепления к плечам 2261 направляющей траверсы для крепления закрывающей трубки 2260 с помощью штифта 2269. См. ФИГ. 66.
На ФИГ. 68-74 показана другая конфигурация для соединения сменного узла стержня 2500 с рамой 2380. Рама 2380 может применяться с рукояткой, как описано в настоящем документе, или может применяться в связи с роботизированной системой. По меньшей мере в одной форме узел стержня 2500 включает в себя стержень 2510, который может включать в себя все другие компоненты стержня 1210, описанные выше, и может иметь концевой эффектор (не показан) описанного выше типа, функционально прикрепленный к нему. Различные конструкции и варианты работы этих элементов описаны выше. Как может быть показано на ФИГ. 68-74, узел стержня 2500 включает в себя модуль крепления стержня или часть крепления стержня 2520, выполненную с возможностью вращательно зацеплять часть модуля крепления рамы 2384 рамы 2380, как дополнительно будет более подробно описано ниже. Модуль крепления стержня 2520, например, может иметь часть кольца 2522, через которую проходит проксимальный конец стержня 2510. Модуль крепления стержня 2520 взаимодействует с частью модуля крепления 2384 рамы 2380 с образованием в нем хода 2581 для подвижного поддержания направляющей траверсы для крепления закрывающей трубки 2560 в нем. Узел направляющей траверсы закрывающей трубки 2560 может поддерживаться на части модуля крепления стержня 2520 и выполнен с возможностью поддержания внутри хода 2581 так, что узел направляющей траверсы закрывающей трубки 2560 может аксиально перемещаться в нем в дистальном и проксимальном направлениях. Как и в случае описанных выше узлов стержня, проксимальный конец рамы стержня 2512 поворотно соединен с модулем крепления стержня 2520 так, что он может поворачиваться относительно него. Проксимальный конец внешней гильзы 2550 поворотно соединен с направляющей траверсой для крепления закрывающей трубки 2560 способами, описанными выше, так, что он может поворачиваться относительно нее. В различных формах форсунка 2590 может применяться описанными выше способами для поворота стержня 2510 вокруг оси стержня SA-SA относительно модуля крепления рамы стержня 2520.
Как дополнительно может быть показано на ФИГ. 68-70, проксимальный конец 2577 промежуточного пускового стержня 2572 проксимально выступает из направляющей траверсы для крепления закрывающей трубки 2560, и на нем образовано ушко крепления стержня 2578. Ложе крепления пускового стержня 2413, образованное в дистальном конце 2411 продольно перемещаемого пускового элемента 2410, образовано для обеспечения вращательной загрузки ушка крепления пускового стержня 2578 с этой стороны.
Как может быть показано на ФИГ. 69, на части модуля крепления рамы 2384 имеется пара шарнирных лож 2385, образованных на ней, которые приспособлены для приема соответствующих шарнирных ушек 2529, образованных на модуле крепления стержня 2520. Когда ушки 2529 поддерживаются внутри шарнирных лож 2385, модуль крепления стержня 2520 можно вращать в функциональное зацепление с модулем крепления рамы 2384, как показано на ФИГ. 70. В частности, ушки 2529 могут образовывать ось шарнира PA-PA, которая может быть по существу поперечна оси активации AA-AA. См. ФИГ. 73. Модуль крепления стержня 2520 может иметь латерально выступающие защелкивающие штифты 2591, выполненные с возможностью защелкивающего зацепления с соответствующими защелкивающими карманами 2387 в модуле крепления рамы 2384. Чтобы начать процесс соединения, промежуточный пусковой стержень 2572 вводят в функциональное зацепление с выполненным с возможностью продольного перемещения приводным элементом в направлении, по существу поперечном оси активации AA-AA.
После того как модуль крепления стержня 2520 защелкнут к модулю крепления рамы 2384, как показано на ФИГ. 72 и 73, затем врач может присоединить систему закрывающего привода (которая может быть аналогична описанной в настоящем документе системе закрывающего привода) к направляющей траверсе для крепления закрывающей трубки 2560.
Различные механизмы сменного стержня, раскрытые в настоящем документе, представляют собой значительные улучшения в сравнении с механизмами хирургического инструмента предшествующего уровня техники, в которых применялись специальные стержни. Например, один механизм стержня может применяться во множестве механизмов рукоятки и/или хирургических системах с роботизированным управлением. Способы соединения механизмов стержня также отличаются от механизмов стержня предшествующего уровня техники, в которых применяют байонетные разъемы и другие конструкции, требующие приложения вращательного движения к стержню и/или рукоятке или кожуху в процессе соединения. Различные примеры описаний процессов соединения, применяемых в раскрытых в настоящем документе узлах стержня, включают в себя приведение части сменного узла стержня в соединительное зацепление с соответствующей частью кожуха, рукоятки и/или рамы в направлении или ориентации, по существу поперечной оси активации. Предполагается, что эти процессы охватывают перемещение одного или обоих из узла стержня и кожуха, рукоятки и/или рамы в процессе соединения. Например, один способ может охватывать удержание рукоятки, кожуха и/или рамы неподвижно при перемещении узла стержня в соединительное зацепление с ним. Другой способ может охватывать удержание узла стержня неподвижно при перемещении рукоятки, кожуха и/или рамы в соединительное зацепление с ним. Другой способ может включать одновременное перемещение узла стержня и рукоятки, кожуха и/или рамы вместе в соединительное зацепление. Следует понимать, что процедуры соединения, применяемые для соединения различных раскрытых в настоящем документе механизмов узла стержня, могут охватывать одну или более (включая все) таких вариаций.
На ФИГ. 75-80 показана рукоятка 2642, которая может быть по существу идентична описанной выше рукоятке 1042, за исключением того, что модуль крепления стержня или часть крепления рамы 2684 рамы 2680 включает в себя узел блокировки 2690 для предотвращения непреднамеренной активации системы закрывающего привода 1750. Как показано, например, на ФИГ. 75 и 76, в модуле крепления рамы 2684 образован проксимальный сегмент прорези блокировки 2692, так что до прикрепления к нему сменного узла стержня 1900’ соответствующее ушко крепления 1066 на закрывающей планке крепления 1764 принимается в него с возможностью скольжения. Таким образом, когда закрывающая планка крепления 1764 находится в этом положении, врач не может активировать систему закрывающего привода. Иными словами, когда ушко активации 1766 принято в проксимальный сегмент прорези блокировки 2692, врач не может активировать закрывающий спусковой механизм 1752. В различных формах может применяться только один проксимальный сегмент прорези блокировки 2692. В других формах предусмотрены два проксимальных сегмента прорези блокировки 2692, и каждое ушко крепления 1766 может приниматься в соответствующий проксимальный сегмент прорези блокировки 2692. В различных формах может применяться пружина блокировки 2695, смещающая узел звена 1760, так что когда закрывающий спусковой механизм 1752 находится в неактивированном положении, закрывающая планка крепления 1764 смещается в положение, в котором по меньшей мере одно из ушек крепления 1766 принимается в проксимальный сегмент прорези блокировки 2692.
Как показано на ФИГ. 77 и 78, узел блокировки 2690 дополнительно может включать в себя дистальную прорезь ушка 2694, образованную в модуле крепления стержня 1920’ и размещенную так, что когда модуль крепления стержня 1920’ полностью прикреплен к раме 2680, дистальная прорезь ушка 2694 открывается в проксимальный сегмент прорези блокировки 2692, как показано на ФИГ. 77 и 78.
Работа узла блокировки закрытия 2690 может быть понятна со ссылкой на ФИГ. 76-80. На ФИГ. 76 показано положение закрывающей планки крепления 1764, когда закрывающий спусковой механизм 1752 не активирован. Как может быть показано на этом чертеже, при нахождении в этом положении ушко крепления 1766 принимается внутрь проксимального сегмента прорези блокировки 2692. Таким образом, если врач попытается активировать закрывающий крючок 1752 в этом положении (т.е. до функционального прикрепления сменного узла стержня 1900’ к раме 2680 в функциональном зацеплении), врач не сможет активировать систему закрывающего привода 1750. После того как врач прикрепил сменный узел стержня 1900’ к раме 2684 так, что он полностью вошел и полностью прикрепился в функциональном зацеплении, дистальный сегмент прорези блокировки 2694 в модуле крепления стержня 1920” будет открываться в проксимальный сегмент прорези блокировки 2692, как показано на ФИГ. 77 и 78. По мере того как модуль крепления стержня 1920’ вводят в функциональное зацепление с модулем крепления рамы 2684, плечо направляющей траверсы 1961, выступающее проксимально из направляющей траверсы для крепления закрывающей трубки 1960, захватит ушко крепления 1766 в открытую вниз прорезь 1963 и протолкнет ее в низ проксимальной прорези блокировки 2692, как показано на ФИГ. 79. После этого, когда врач желает активировать систему закрывающего привода 1750 путем активации закрывающего спускового механизма 1752, узел закрывающего звена 1760 будет протолкнут в дистальном направлении D. По мере того как закрывающая планка крепления 1764 продвигается дистально, ушко крепления 1766 может продвигаться дистально в дистальную прорезь блокировки 2694 на расстояние, необходимое, например, для обеспечения закрытия упора или приложения соответствующего активирующего движения к концевому эффектору, функционально соединенному с узлом стержня концевого эффектора 1900’. На ФИГ. 80 показано положение закрывающей планки крепления 1764, когда система закрывающего привода 1750 полностью активирована, например, когда закрывающий спусковой механизм 1752 полностью нажат.
На ФИГ. 81-85 показан другой узел блокировки 2690’ для предотвращения непреднамеренной активации системы закрывающего привода 1750 до функционального зацепления сменного узла стержня 1900’ с рамой 2680. По меньшей мере в одной форме на модуле крепления рамы или части крепления рамы 2684’ образован буртик блокировки 2696 так, что когда сменный узел стержня 1900’ не находится в функциональном зацеплении с рамой 2680, закрывающая планка крепления 1764 не может перемещаться в дистальном направлении D с помощью буртика 2696. См. ФИГ. 81. Когда модуль крепления стержня 1920’ введен в функциональное зацепление с модулем крепления рамы 2684’, плечо направляющей траверсы 1961, выступающее проксимально из направляющей траверсы для крепления закрывающей трубки 1960, захватит ушко крепления 1766 на закрывающей планке крепления 1764 и переместит закрывающую планку крепления 1764 в «незаблокированное» положение, показанное на ФИГ. 82 и 83. Как, в частности, показано на ФИГ. 82, находясь в незаблокированном положении, закрывающая планка крепления 1764 размещена ниже буртика 2696 на модуле крепления рамы 2684’. Когда закрывающая планка крепления находится в незаблокированном положении, она может быть продвинута дистально, когда система закрывающего привода 1750 активирована путем нажатия на активирующий спусковой механизм 1752.
На ФИГ. 86-91 показаны другой сменный узел стержня 1900” и рукоятка 2642, в которых применяется узел блокировки 2700 для предотвращения непреднамеренной активации системы закрывающего привода 1750”. Как показано на ФИГ. 88 и 89, одна форма узла блокировки 2700 включает в себя скользящий элемент исполнительного механизма 2720, который поддерживается цапфой с возможностью скольжения в дистально проходящей лапке блокировки 2710, образованной на модуле крепления рамы или части крепления рамы 2684”. В частности, по меньшей мере в одной форме скользящий элемент исполнительного механизма 2720 имеет два латерально проходящих скользящих язычка 2722, которые принимаются в соответствующие прорези 2712, образованные в лапке блокировки 2710. См. ФИГ. 86. Скользящий элемент исполнительного элемента 2720 вращательно соединен с закрывающей планкой крепления 1764” системы закрывающего привода 1750”, и в нем также образован карман исполнительного механизма 2724, приспособленный для приема выступающего вниз язычка исполнительного механизма 2702 на направляющей траверсе для крепления закрывающей трубки 1960’. Как и в случае с описанной выше направляющей траверсой для крепления закрывающей трубки 1960, закрывающая направляющая траверса для крепления закрывающей трубки 1960’ поворотно прикреплена к внешней гильзе 1950 различными способами, описанными в настоящем документе, и выполнена с возможностью аксиально перемещаться внутри модуля крепления стержня 1920’.
Как показано на ФИГ. 88-89, узел блокировки 2700 дополнительно может включать в себя выполненный с возможностью перемещения элемент блокировки 2730, который принимается в полость 2714, образованную в лапке блокировки 2710. Элемент блокировки 2730 имеет часть блокировки 2732, которая выполнена по размеру так, чтобы проходить в карман исполнительного механизма 2724 так, что при нахождении в «заблокированном» положении элемент блокировки 2730 предотвращает дистальное перемещение скользящего элемента исполнительного механизма 2720 относительно лапки блокировки 2710. Как, в частности, показано на ФИГ. 89, в полости 2714 предусмотрена пружина блокировки 2734, смещающая элемент блокировки 2730 в заблокированное положение.
На ФИГ. 89 показан узел блокировки 2700 в заблокированном положении. В этом положении часть блокировки 2732 размещена в кармане исполнительного механизма 2724, и посредством этого не допускается дистальное перемещение скользящего элемента исполнительного механизма 2720. Таким образом, если врач пытается активировать систему закрывающего привода 1750”, нажимая на закрывающий спусковой механизм 1752, часть блокировки 2732 предотвратит продвижение скользящего элемента 2720. На ФИГ. 90 показано положение элемента блокировки 2730 после того, как язычок исполнительного механизма 2702 на направляющей траверсе закрывающей трубки 1960’ был введен в карман исполнительного механизма 2724 и сместил элемент блокировки 2370 в «незаблокированное» положение внизу полости 2714, причем скользящий элемент исполнительного механизма 2720 может быть продвинут дистально. На ФИГ. 91 показано положение ползунка исполнительного механизма 2720 после того, как закрывающий спусковой механизм 1752 был полностью нажат и посредством этого аксиально продвинул направляющую траверсу для крепления закрывающей трубки 1960’ и прикрепленную к ней внешнюю гильзу 1950.
На ФИГ. 92-98 показан другой сменный узел стержня 1900” и рукоятка 2642”, в которых применяется узел блокировки 2800 для предотвращения непреднамеренной активации системы закрывающего привода 1750”. Система закрывающего привода 1750” может быть аналогична описанной выше системе закрывающего привода 1050 и 1750 и включает в себя закрывающий спусковой механизм 1752 и узел закрывающего звена 1760’. Узел закрывающего звена 1760’ может включать в себя закрывающее звено 1762’, вращательно соединенное с закрывающей планкой крепления 1764. В дополнение скользящий элемент исполнительного механизма 2720 может быть вращательно прикреплен к закрывающей планке крепления 1764 и также может поддерживаться цапфой с возможностью скольжения в проходящую дистально лапку блокировки 2710’, образованную на модуле крепления рамы 2684”. В частности, по меньшей мере в одной форме скользящий элемент исполнительного механизма 2720 имеет два латерально проходящих скользящих язычка 2722, которые принимаются в соответствующие прорези 2712, образованные в лапке блокировки 2710. См. ФИГ. 92. Скользящий элемент исполнительного механизма 2720 вращательно соединен с закрывающей планкой крепления 1764 системы закрывающего привода 1750”, и в нем также образован карман исполнительного механизма 2724, приспособленный для приема выступающего вниз язычка исполнительного механизма 2702 на направляющей траверсе для крепления закрывающей трубки 1960’. Как и в случае с описанной выше направляющей траверсой для крепления закрывающей трубки 1960’, закрывающая направляющая траверса для крепления закрывающей трубки 1960’ поворотно прикреплена к внешней гильзе 1950 различными способами, описанными в настоящем документе, и выполнена с возможностью аксиального перемещения внутри модуля крепления стержня 1920”.
В различных формах узел блокировки 2800 дополнительно может включать в себя выполненную с возможностью перемещения планку блокировки или элемент блокировки 2802, вращательно прикрепленный к модулю крепления рамы 2684”. Например, планка блокировки 2802 может быть вращательно примонтирована к латерально выступающему штифту 2804 на модуле крепления рамы 2684”. Планка блокировки 2802 дополнительно может иметь штифт блокировки 2806, выступающий из ее проксимальной части и выполненный с возможностью проходить в прорезь блокировки 2808, предусмотренную в закрывающем звене 1762’, когда система закрывающего привода 1750” не активирована. См. ФИГ. 94. Штифт блокировки 2806 может проходить через прорезь блокировки 2812, предусмотренную в боковой пластине 2810, прикрепленной к раме 2680’. Прорезь блокировки 2812 может служить для направления штифта блокировки 2806 между заблокированным (ФИГ. 92-94) и незаблокированным положениями (ФИГ. 95-98).
Когда узел блокировки находится в заблокированном положении, штифт блокировки 2806 принимается в прорезь блокировки 2808 в закрывающем звене 1762’. При нахождении в этом положении штифт блокировки предотвращает перемещение узла закрывающего звена 1760’. Таким образом, если врач пытается активировать систему закрывающего привода 1750” путем нажатия на закрывающий спусковой механизм 1752, штифт блокировки 2806 предотвратит перемещение закрывающего звена 1762 и в конечном счете предотвратит продвижение скользящего элемента 2720. На ФИГ. 95-98 показано положение планки блокировки 2602 после того, как модуль крепления стержня 1920” был соединен в функциональном зацеплении с модулем крепления рамы 2684”. При нахождении в этом положении часть высвобождения блокировки 2820 на модуле крепления рамы 2684” находится в контакте с планкой блокировки 2802 и заставляет ее вращаться, посредством этого перемещая штифт блокировки 2806 из прорези блокировки 2808 в закрывающем звене 1762’. Также, как показано на ФИГ. 97 и 98, когда модуль крепления стержня 1920” соединен в функциональном зацеплении с модулем крепления рамы 2684”, язычок исполнительного механизма 2702 на направляющей траверсе для закрывающей трубки 1960’ входит в карман исполнительного механизма 2724 в скользящем элементе исполнительного механизма 2720. На ФИГ. 98 показано положение скользящего элемента исполнительного механизма 2720 после того, как закрывающий спусковой механизм 1752 полностью нажат и посредством этого аксиально продвинул направляющую траверсу для крепления закрывающей трубки 1960’ и прикрепленную к ней внешнюю гильзу 1950 в дистальном направлении D.
На ФИГ. 99-101 показан блокирующий узел стержня 2900, выполненный с возможностью предотвращения осевого перемещения пускового элемента 1270 до тех пор, пока сменный узел стержня не будет соединен в функциональном зацеплении с хирургическим инструментом. Более конкретно блокирующий узел стержня 2900 может предотвращать осевое перемещение пускового элемента 1270 до тех пор, пока пусковой элемент не будет соединен функциональным зацеплением с выполненным с возможностью продольного перемещения приводным элементом 1110 (выполненный с возможностью продольного перемещения приводной элемент 1110 можно увидеть на ФИГ. 88). По меньшей мере в одной форме блокирующий узел стержня 2900 может содержать блокирующий элемент стержня или блокирующую пластину 2902, имеющую отверстие с зазором для стержня 2904 через нее, которая поддерживается частью рамы крепления стержня или модуля 1920” для скользящего перемещения в направлениях LD, по существу поперечных оси стержня SA-SA. См. ФИГ. 99. Блокирующая пластина стержня 2902 может, например, перемещаться между заблокированным положением, показанным на ФИГ. 100, причем блокирующая пластина стержня 2902 проходит в утопленную область 1279 между ушком крепления 1278 и проксимальным концом 1277 промежуточной части пускового стержня 1272. В таком заблокированном положении блокирующая пластина стержня 2902 предотвращает какое-либо осевое перемещение промежуточной части пускового стержня 1272. Блокирующая пластина стержня 2902 может смещаться в заблокированное положение с помощью пружины блокировки 2906 или другого смещающего механизма. Следует обратить внимание на то, что на ФИГ. 99 для целей ясности блокирующая пластина 2902 показана в незаблокированной конфигурации. Когда сменный узел стержня не прикреплен к хирургическому инструменту, блокирующая пластина 2902 будет смещена в заблокированное положение, как показано на ФИГ. 100. Следует понимать, что такой механизм предотвращает любое непреднамеренное осевое перемещение пускового элемента 1270, когда сменный узел стержня не был прикреплен в функциональном зацеплении с хирургическим инструментом (например, портативным инструментом, роботизированной системой и т.д.).
Как подробно описано выше, в процессе соединения сменного узла стержня с хирургическим инструментом ушко крепления 1278 на конце промежуточной части пускового стержня 1272 входит в ложе 1113 в дистальном конце выполненного с возможностью продольного перемещения приводного элемента 1110. См. ФИГ. 88. Когда ушко крепления 1278 входит в ложе 1113, дистальный конец выполненного с возможностью продольного перемещения приводного элемента 1110 входит в контакт с блокирующей пластиной стержня 2902 и перемещает ее в незаблокированное положение (ФИГ. 101), причем дистальный конец выполненного с возможностью продольного перемещения приводного элемента 1110 и проксимальный конец 1277 промежуточной части пускового стержня 1272 могут аксиально перемещаться внутри отверстия с зазором для стержня 2904 в ответ на активирующие движения, прилагаемые к выполненному с возможностью продольного перемещения приводному элементу 1110.
Как показано на ФИГ. 102-112, хирургический инструмент, такой как хирургический инструмент 10000, и/или любой другой хирургический инструмент, такой как система хирургического инструмента 1000, например, может содержать стержень 10010 и концевой эффектор 10020, причем концевой эффектор 10020 может шарнирно поворачиваться относительно стержня 10010. В дополнение к указанному выше, хирургический инструмент 10000 может содержать узел стержня, содержащий стержень 10010 и концевой эффектор 10020, причем узел стержня может съемно прикрепляться к рукоятке хирургического инструмента 10000. Как показано преимущественно на ФИГ. 102-104, стержень 10010 может содержать раму стержня 10012, а концевой эффектор 10020 может содержать раму концевого эффектора 10022, причем рама концевого эффектора 10022 может быть поворотно соединена с рамой стержня 10012 вокруг шарнирного сочленения 10090. В отношении шарнирного сочленения 10090 по меньшей мере в одном примере рама стержня 10012 может содержать шарнирный штифт 10014, который может приниматься внутрь шарнирного отверстия 10024, образованного в раме концевого эффектора 10022. Рама концевого эффектора 10022 дополнительно может содержать проходящий от нее приводной штифт 10021, который может быть функционально зацеплен со шкивом шарнира. Приводной штифт 10021 может быть выполнен с возможностью принимать прилагаемое к нему усилие и, в зависимости от направления, в котором усилие приложено к приводному штифту 10021, поворота концевого эффектора 10020 в первом направлении или во втором, противоположном, направлении. Более конкретно, когда усилие прилагается к приводному штифту 10021, например, шкивом шарнира, в дистальном направлении, шкив шарнира может толкать приводной штифт 10021 вокруг шарнирного штифта 10014 и, аналогичным образом, когда шкив шарнира прилагает усилие к приводному штифту 10021 в проксимальном направлении, шкив шарнира может вытягивать приводной штифт 10021 вокруг шарнирного штифта 10014 в противоположном направлении. В случае если приводной штифт 10021 должен был быть размещен, например, на противоположной стороне шарнирного сочленения 10090, дистальные и проксимальные перемещения шкива шарнира будут оказывать противоположное воздействие на концевой эффектор 10020.
В дополнение к указанному выше, как показано на ФИГ. 102-104, хирургический инструмент 10000 может содержать систему шкива шарнира, включающую в себя проксимальный шкив шарнира 10030 и дистальный шкив шарнира 10040. Когда приводное усилие передается на проксимальный шкив шарнира 10030 в проксимальном направлении или дистальном направлении, приводное усилие может передаваться на дистальный шкив шарнира 10040 через блокировку шарнира 10050, как более подробно описано ниже. В различных ситуациях, в дополнение к указанному выше, пусковой элемент 10060 хирургического инструмента 10000 может использоваться для передачи такого приводного усилия на проксимальный шкив шарнира 10040. Например, как показано преимущественно на ФИГ. 102-112, хирургический инструмент 10000 может содержать систему сцепления 10070, которая может быть выполнена с возможностью избирательного соединения проксимального шкива шарнира 10030 с пусковым элементом 10060 так, чтобы перемещение пускового элемента 10060 можно было передать на проксимальный шкив шарнира 10030. В процессе применения система сцепления 10070 может быть выполнена с возможностью перемещения между зацепленным состоянием (ФИГ. 102-108 и 111), в котором проксимальный шкив шарнира 10030 функционально зацеплен с пусковым элементом 10060, и расцепленным состоянием (ФИГ. 109, 110 и 112), в котором проксимальный шкив шарнира 10030 функционально не зацеплен с пусковым элементом 10060. В различных обстоятельствах система сцепления 10070 может содержать зацепляющий элемент 10072, который может быть выполнен с возможностью непосредственного соединения проксимального шкива шарнира 10030 с пусковым элементом 10060. Зацепляющий элемент 10072 может содержать по меньшей мере один приводной зубец 10073, который может приниматься внутрь приводной выемки 10062, образованной в пусковом элементе 10060, когда система сцепления 10070 находится в ее зацепленном состоянии. В некоторых обстоятельствах, как показано преимущественно на ФИГ. 28 и 31, зацепляющий элемент 10072 может содержать первый приводной зубец 10073, проходящий с одной стороны проксимального шкива шарнира 10030, и второй приводной зубец 10073, проходящий с другой стороны проксимального шкива шарнира 10030, для зацепления с приводной выемкой 10062, образованной в пусковом элементе 10060.
В дополнение к указанному выше, как показано на ФИГ. 102-112, система сцепления 10070 дополнительно может содержать элемент исполнительного механизма 10074, который может быть выполнен с возможностью поворота или вращения зацепляющего элемента 10072 вокруг шарнирного штифта 10071, примонтированного к проксимальному концу 10039 (ФИГ. 104A) проксимального шкива шарнира 10030. Элемент исполнительного механизма 10074 может содержать первый, или внешний, выступ 10076 и второй, или внутренний, выступ 10077, между которыми может быть образована выемка 10078, выполненная с возможностью принимать управляющее плечо 10079, образованное в зацепляющем элементе 10072. Когда элемент исполнительного механизма 10074 поворачивается в направлении от пускового элемента 10060, т.е. от продольной оси стержня 10010, внутренний выступ 10077 может входить в контакт с управляющим плечом 10079 зацепляющего элемента 10072 и поворачивать зацепляющий элемент 10072 от пускового элемента 10060, перемещая приводной зубец 10073 из приводной щели 10062 и в результате этого расцепляя зацепляющий элемент 10072 от пускового элемента 10060. Одновременно зацепляющий элемент 10072 также может быть расцеплен от проксимального шкива шарнира 10030. По меньше мере в одной ситуации проксимальный шкив шарнира 10030 может содержать приводную щель 10035, образованную в ней, которая также может быть выполнена с возможность принимать часть приводного зубца 10073, когда зацепляющий элемент 10072 находится в зацепленном положении, причем, аналогично указанному выше, приводной зубец 10073 может быть извлечен из приводной щели 10035, когда зацепляющий элемент 10072 перемещен в его расцепленное положение. В некоторых других обстоятельствах, как показано преимущественно на ФИГ. 108, приводной зубец 10073 может образовывать углубление 10083 между ними, которое может приниматься в приводную щель 10035. В любом случае в некотором смысле зацепляющий элемент 10072 может быть выполнен с возможностью, во-первых, одновременного зацепления с приводной щелью 10035 в проксимальном шкиве шарнира 10030 и приводной щелью 10062 в пусковом элементе 10060, когда зацепляющий элемент 10072 находится в его зацепленном положении и, во-вторых, одновременного расцепления от приводной щели 10035 и приводной щели 10062, когда зацепляющий элемент 10072 перемещен в его расцепленное состояние. Как далее показано на ФИГ. 102-104, элемент исполнительного механизма 10074 может быть поворотно или вращательно установлен на кожухе, по меньшей мере частично окружающем стержень 10010, с помощью шарнирного штифта 10075. В некоторых обстоятельствах шарнирный штифт 10075 может быть примонтирован к раме рукоятки 10001 и/или кожуху рукоятки, окружающему раму рукоятки 10001, такому как, например, кожух рукоятки, включающий в себя части 11002 и 11003, как показано на ФИГ. 131. Хирургический инструмент 10000 дополнительно может содержать торсионную пружину 10080, по меньшей мере частично окружающую указанный шарнирный штифт 10075, который может быть выполнен с возможностью передачи поворотного смещения элементу исполнительного механизма 10074 для смещения исполнительного механизма 10074 и зацепляющего элемента 10072 в направлении пускового элемента 10060, а также для смещения зацепляющего элемента 10072 в его зацепленное положение. Для этого внешний выступ 10076 элемента исполнительного механизма 10074 может находиться в контакте с управляющим плечом 10079 зацепляющего элемента 10072 и вращать зацепляющий элемент 10072 внутрь вокруг шарнирного штифта 10071.
В дополнение к указанному выше, при сравнении ФИГ. 108 и 109 читателю будет понятно, что система сцепления 10070 была перемещена между зацепленным состоянием (ФИГ. 108) и расцепленным состоянием (ФИГ. 109). Аналогичное сравнение можно провести между ФИГ. 111 и 112, причем читателю будет понятно, что закрывающая трубка 10015 стержня 10010 была продвинута из проксимального положения (ФИГ. 111) в дистальное положение (ФИГ. 112) для перемещения системы сцепления 10070 между ее зацепленным состоянием (ФИГ. 111) и ее расцепленным состоянием (ФИГ. 112). Более конкретно элемент исполнительного механизма 10074 может включать в себя часть элемента, приводимого в действие кулачком, 10081, который может находиться в контакте с закрывающей трубкой 10015 и может быть смещен в его расцепленное положение, когда закрывающая трубка 10015 продвигается дистально, например, для закрытия упора концевого эффектора 10020. Взаимодействие закрывающей трубки и упора описано в другом месте настоящей заявки, и для краткости описание не будет повторяться в настоящем документе. В различных обстоятельствах, как показано преимущественно на ФИГ. 107, часть элемента, приводимого в действие кулачком, 10081 элемента исполнительного механизма 10074 может быть расположена внутри окна 10016, образованного в закрывающей трубке 10015. Когда система сцепления 10070 находится в ее зацепленном состоянии, край или боковая стенка 10017 окна 10016 может находиться в контакте с частью элемента, приводимого в действие кулачком, 10081 и вращать элемент исполнительного механизма 10074 вокруг шарнирного штифта 10075. В результате боковая стенка 10017 окна 10016 может действовать как кулачок по мере перемещения закрывающей трубки 10015 в его дистальное, или закрытое, положение. По меньшей мере в одной ситуации элемент исполнительного механизма 10074 может содержать проходящий от него стопор, который может быть выполнен с возможностью зацепления, например, кожуха рукоятки, и ограничения перемещения элемента исполнительного механизма 10074. В некоторых обстоятельствах узел стержня может включать в себя пружину, расположенную в промежутке между кожухом узла стержня и консолью 10082, проходящей от элемента исполнительного механизма 10074, которая может быть выполнена с возможностью смещать элемент исполнительного механизма 10074 в его зацепленное положение. В дистальном закрытом положении закрывающей трубки 10015, описанной выше, закрывающая трубка 10015 может оставаться расположенной под частью элемента, приводимого в действие кулачком, 10081 и удерживать систему сцепления 10070 в ее расцепленном состоянии. В таком расцепленном состоянии перемещение пускового элемента 10060 не передается на проксимальный шкив шарнира 10030 и/или любую другую часть системы шкива шарнира. Когда закрывающая трубка 10015 отведена назад в ее проксимальное, или открытое, положение, закрывающая трубка 10015 может быть отведена из-под части элемента, приводимого в действие кулачком, 10081 элемента исполнительного механизма 10074 так, что пружина 10080 может сместить элемент исполнительного механизма 10074 назад в окно 10016 и позволить системе сцепления 10070 повторно войти в ее зацепленное состояние.
Когда проксимальный шкив шарнира 10030 функционально зацеплен с пусковым элементом 10060 с помощью системы сцепления 10070, в дополнение к указанному выше, пусковой элемент 10060 может перемещать проксимальный шкив шарнира 10030 проксимально и/или дистально. Например, проксимальное перемещение пускового элемента 10060 может перемещать проксимальный шкив шарнира 10030 проксимально, и, аналогичным образом, дистальное перемещение пускового элемента 10060 может перемещать проксимальный шкив шарнира 10030 дистально. Как показано преимущественно на ФИГ. 102-104, перемещение проксимального шкива шарнира 10030 (проксимальное или дистальное) может разблокировать блокировку шарнира 10050, как ниже дополнительно описано более подробно. Как показано в основном на ФИГ. 102, блокировка шарнира 10050 может содержать раму, имеющую одинаковую протяженность с рамой 10042 дистального шкива шарнира 10040. В совокупности рама блокировки шарнира 10050 и рама 10042 в дальнейшем в совокупности могут называться рамой 10042. Рама 10042 может содержать первую, или дистальную, полость блокировки 10044 и вторую, или проксимальную, полость блокировки 10046, образованную в ней, причем первая полость блокировки 10044 и вторая полость блокировки 10046 могут быть отделены промежуточным элементом рамы 10045. Блокировка шарнира 10050 дополнительно может включать в себя по меньшей мере один первый элемент блокировки 10054, по меньшей мере частично расположенный внутри первой полости блокировки 10044, которая может быть выполнена с возможностью затруднять или предотвращать проксимальное перемещение дистального шкива шарнира 10040. В отношении конкретного варианта осуществления, показанного на ФИГ. 102-104, имеются три первых элемента блокировки 10054, расположенных внутри первой полости блокировки 10044, все из которых могут действовать аналогичным параллельным способом и могут в совокупности действовать как единый элемент блокировки. Предусмотрены другие варианты осуществления, в которых могут использоваться более трех или менее трех первых элементов блокировки 10054. Аналогичным образом, блокировка шарнира 10050 дополнительно может включать в себя по меньшей мере один второй элемент блокировки 10056, по меньшей мере частично расположенный внутри второй полости блокировки 10046, которая может быть выполнена с возможностью затруднять или предотвращать дистальное перемещение дистального шкива шарнира 10040. В отношении конкретного варианта осуществления, показанного на ФИГ. 102-104, имеются три вторых элемента блокировки 10056, расположенных внутри второй полости блокировки 10046, все из которых могут действовать аналогичным параллельным способом и могут в совокупности действовать как единый элемент блокировки. Предусмотрены другие варианты осуществления, в которых могут использоваться более трех или менее трех вторых элементов блокировки 10056.
В дополнение к указанному выше, как показано преимущественно на ФИГ. 104A, каждый первый элемент блокировки 10054 может содержать отверстие блокировки 10052 и хвостовик блокировки 10053. Хвостовик блокировки 10053 может быть расположен внутри первой полости блокировки 10044, а отверстие блокировки 10052 может зацепляться с возможностью скольжения с рельсовой направляющей рамы 10011, примонтированной к раме стержня 10012. Как показано на ФИГ. 102, рельсовая направляющая рамы 10011 проходит через отверстия 10052 в первых элементах блокировки 10054. Как читатель отметит с дополнительной ссылкой на ФИГ. 102, первые элементы блокировки 10054 не ориентированы в перпендикулярной конфигурации с рельсовой направляющей рамы 10011. Скорее первые элементы блокировки 10054 расположены и совмещены под непрямым углом по отношению к рельсовой направляющей рамы 10011 так, что края или боковые стенки отверстий блокировки 10052 зацепляются с рельсовой направляющей рамы 10011. Более того, взаимодействие между боковыми стенками отверстий блокировки 10052 и рельсовой направляющей рамы 10011 может создавать усилие сопротивления или фрикционное усилие между ними, что может затруднять относительное перемещение между первыми элементами блокировки 10054 и рельсовой направляющей рамы 10011 и в результате этого сопротивляться проксимальному толкающему усилию P, приложенному к дистальному шкиву шарнира 10040. Иными словами, первые элементы блокировки 10054 могут предотвращать или по меньшей мере затруднять поворот концевого эффектора 10020 в направлении, указанном стрелкой 10002. Если к концевому эффектору 10020 приложен вращающий момент в направлении стрелки 10002, проксимальное толкающее усилие P будет передаваться от приводного штифта 10021, проходящего от рамы 10022 концевого эффектора 10024, к раме 10042 дистального шкива шарнира 10040. В различных обстоятельствах приводной штифт 10021 может плотно приниматься внутрь прорези для штифта 10043, образованной в дистальном конце 10041 дистального шкива шарнира 10040 так, что приводной штифт 10021 может прилегать к проксимальной боковой стенке прорези для штифта 10043 и передавать проксимальное толкающее усилие P к дистальному шкиву шарнира 10040. Однако в дополнение к указанному выше, проксимальное толкающее усилие P будет использоваться только для стимулирования блокирующего зацепления между первыми элементами блокировки 10054 и рельсовой направляющей рамы 10011. Более конкретно, проксимальное толкающее усилие P может быть передано на хвостовики 10053 первых элементов блокировки 10054, что может привести к тому, что первые элементы блокировки 10054 поворачиваются и уменьшают угол, образованный между первыми элементами блокировки 10054 и рельсовой направляющей рамы 10011, и в результате этого увеличивается сцепление между боковыми стенками отверстий блокировки 10052 и рельсовой направляющей рамы 10011. Затем в конечном счете первые элементы блокировки 10054 могут блокировать перемещение дистального шкива шарнира 10040 в одном направлении.
Для высвобождения первых элементов блокировки 10054 и обеспечения возможности поворота концевого эффектора 10020 в направлении, указанном стрелкой 10002, как показано на ФИГ. 103, можно проксимально вытянуть проксимальный шкив шарнира 10030, чтобы распрямить или по меньшей мере по существу распрямить первые элементы блокировки 10054 в перпендикулярное или по меньшей мере по существу перпендикулярное положение. В таком положении сцепление или усилие сопротивления между боковыми стенками отверстий блокировки 10052 и рельсовой направляющей рамы 10011 может быть достаточно снижено или устранено так, что дистальный шкив шарнира 10040 можно будет перемещать проксимально. Для выпрямления первых элементов блокировки 10054 в положение, показанное на ФИГ. 103, проксимальный шкив шарнира 10030 можно вытянуть проксимально так, что дистальное плечо 10034 проксимального шкива шарнира 10030 войдет в контакт с первыми элементами блокировки 10054, вытянув и повернув первые элементы блокировки 10054 в их выпрямленное положение. В различных обстоятельствах проксимальный шкив шарнира 10030 можно продолжать вытягивать проксимально до тех пор, пока проксимальное плечо 10036, проходящее от него, не пойдет в контакт или не упрется в проксимальную стенку привода 10052 рамы 10042 и не вытянет раму 10042 проксимально, шарнирно поворачивая концевой эффектор 10002. По существу можно приложить проксимальное вытягивающее усилие от проксимального шкива шарнира 10030 к дистальному шкиву шарнира 10040 путем взаимодействия между проксимальным плечом 10036 и проксимальной стенкой привода 10052, причем такое вытягивающее усилие может быть передано через раму 10042 к приводному штифту 10021, шарнирно поворачивая концевой эффектор 10020 в направлении, указанном стрелкой 10002. После того как концевой эффектор 10020 был надлежащим образом шарнирно повернут в направлении стрелки 10002, проксимальный шкив шарнира 10040 в различных ситуациях можно высвободить, что позволит блокировке шарнира 10050 повторно заблокировать дистальный шкив шарнира 10040 и концевой эффектор 10020 в положении. В различных обстоятельствах блокировка шарнира 10050 может содержать пружину 10055, расположенную в промежутке между группой первых элементов блокировки 10054 и группой вторых элементов блокировки 10056, которая может сжиматься, когда первые элементы блокировки 10054 распрямляются для разблокирования проксимального перемещения дистального шкива шарнира 10040, как описано выше. Когда проксимальный шкив шарнира 10030 высвобождается, пружина 10055 может повторно упруго расширяться, толкая первые элементы блокировки 10054 в их угловые положения, показанные на ФИГ. 102.
Одновременно с указанным выше, как также показано на ФИГ. 102 и 103, вторые элементы блокировки 10056 могут оставаться в угловом положении, в то время как первые элементы блокировки 10054 блокируются и разблокируются, как описано выше. Читателю будет понятно, что, хотя вторые элементы блокировки 10056 расположены и совмещены в угловом положении относительно рельсовой направляющей стержня 10011, вторые элементы блокировки 10056 не выполнены с возможностью препятствовать или по меньшей мере по существу препятствовать проксимальному движению дистального шкива шарнира 10040. Когда дистальный шкив шарнира 10040 и блокировка шарнира 10050 скользят проксимально, как описано выше, вторые элементы блокировки 10056 могут скользить дистально вдоль рельсовой направляющей рамы 10011, в различных ситуациях без изменения или по меньшей мере без изменения по существу их углового совмещения в отношении рельсовой направляющей 10011. Хотя вторые элементы блокировки 10056 допускают проксимальное перемещение дистального шкива шарнира 10040 и блокировки шарнира 10050, вторые элементы блокировки 10056 могут быть выполнены с возможностью избирательно предотвращать или по меньшей мере затруднять дистальное перемещение дистального шкива шарнира 10040, как дополнительно более подробно описано ниже.
Аналогично указанному выше, как показано преимущественно на ФИГ. 104A, каждый из второго элемента блокировки 10056 может содержать отверстие блокировки 10057 и хвостовик блокировки 10058. Хвостовик блокировки 10058 может быть размещен внутри второй полости блокировки 10046, а отверстие блокировки 10057 может быть зацеплено с возможностью скольжения с рельсовой направляющей рамы 10011, примонтированной к раме стержня 10012. Как также показано на ФИГ. 102, рельсовая направляющая рамы 10011 проходит через отверстия 10057 во вторых элементах блокировки 10056. Как читатель отметит с дополнительной ссылкой на ФИГ. 102, вторые элементы блокировки 10056 не ориентированы в перпендикулярной конфигурации с рельсовой направляющей рамы 10011. Скорее вторые элементы блокировки 10056 расположены и совмещены под непрямым углом по отношению к рельсовой направляющей рамы 10011 так, что края или боковые стенки отверстий блокировки 10057 зацепляются с рельсовой направляющей рамы 10011. Более того, взаимодействие между боковыми стенками отверстий блокировки 10057 и рельсовой направляющей рамы 10011 может создавать усилие сопротивления или фрикционное усилие между ними, которое может затруднять относительное перемещение между вторыми элементами блокировки 10056 и рельсовой направляющей рамы 10011 и в результате сопротивляться дистальному усилию D, приложенному к дистальному шкиву шарнира 10040. Иными словами, вторые элементы блокировки 10056 могут предотвратить или по меньшей мере затруднить поворот концевого эффектора 10020 в направлении, указанном стрелкой 10003. Если к концевому эффектору 10020 прилагается вращающий момент в направлении стрелки 10003, дистальное вытягивающее усилие D будет передано от приводного штифта 10021, проходящего от рамы 10022 концевого эффектора 10024, к раме 10042 дистального шкива шарнира 10040. В различных обстоятельствах приводной штифт 10021 может плотно приниматься внутрь прорези для штифта 10043, образованной в дистальном конце 10041 дистального шкива шарнира 10040 так, что приводной штифт 10021 может прилегать к дистальной боковой стенке прорези для штифта 10043 и передавать дистальное вытягивающее усилие D к дистальному шкиву шарнира 10040. Однако в дополнение к указанному выше, дистальное вытягивающее усилие D будет использоваться только для стимуляции блокирующего зацепления между вторыми элементами блокировки 10056 и рельсовой направляющей рамы 10011. Более конкретно, дистальное вытягивающее усилие D может быть передано хвостовикам 10058 вторых элементов блокировки 10056, что может привести к тому, что вторые элементы блокировки 10056 поворачиваются и уменьшают угол, образованный между вторыми элементами блокировки 10056 и рельсовой направляющей рамы 10011, и в результате этого увеличивается сцепление между боковыми стенками отверстий блокировки 10057 и рельсовой направляющей рамы 10011. Затем в конечном итоге вторые элементы блокировки 10056 могут блокировать перемещение дистального шкива шарнира 10040 в одном направлении.
Для высвобождения вторых элементов блокировки 10056 и обеспечения возможности поворота концевого эффектора 10020 в направлении, указанном стрелкой 10003, как показано на ФИГ. 104, проксимальный шкив шарнира 10030 можно протолкнуть дистально, чтобы распрямить или по меньшей мере по существу распрямить вторые элементы блокировки 10056 в перпендикулярное или по меньшей мере по существу перпендикулярное положение. В таком положении сцепление или усилие сопротивления между боковыми стенками отверстий блокировки 10057 и рельсовой направляющей рамы 10011 может быть достаточно уменьшено или устранено так, что дистальный шкив шарнира 10040 можно переместить дистально. Чтобы выпрямить вторые элементы блокировки 10056 в положение, показанное на ФИГ. 104, проксимальный шкив шарнира 10030 можно протолкнуть дистально так, что проксимальное плечо 10036 проксимального шкива шарнира 10030 войдет в контакт со вторыми элементами блокировки 10056, протолкнув и повернув вторые элементы блокировки 10056 в их выпрямленное положение. В различных обстоятельствах проксимальный шкив шарнира 10030 можно продолжать толкать дистально до тех пор, пока дистальное плечо 10034, проходящее от него, не войдет в контакт или не упрется в дистальную приводную стенку 10051 на раме 10042 и не толкнет раму 10042 дистально, шарнирно повернув концевой эффектор 10020. По существу можно приложить дистальное толкающее усилие от проксимального шкива шарнира 10030 к дистальному шкиву шарнира 10040 с помощью взаимодействия между дистальным плечом 10034 и дистальной приводной стенкой 10051, причем такое толкающее усилие может передаваться через раму 10042 на приводной штифт 10021, шарнирно поворачивая концевой эффектор 10020 в направлении, указанном стрелкой 10003. После того как концевой эффектор 10020 был надлежащим образом шарнирно повернут в направлении стрелки 10003, проксимальный шкив шарнира 10040 можно в различных ситуациях высвободить, что позволит блокировке шарнира 10050 повторно заблокировать дистальный шкив шарнира 10040 и концевой эффектор 10020 в положении. В различных обстоятельствах, аналогично указанному выше, пружина 10055, расположенная в промежутке между группой первых элементов блокировки 10054 и группой вторых элементов блокировки 10056, может сжиматься, когда вторые элементы блокировки 10056 распрямляются и разблокируют дистальное перемещение дистального шкива шарнира 10040, как описано выше. Когда проксимальный шкив шарнира 10040 высвобождается, пружина 10055 может повторно упруго расширяться, толкая вторые элементы блокировки 10056 в их угловые положения, показанные на ФИГ. 102.
Одновременно с указанным выше, как также показано на ФИГ. 102 и 104, первые элементы блокировки 10054 могут оставаться в угловом положении, в то время как вторые элементы блокировки 10056 блокируются и разблокируются, как описано выше. Читателю будет понятно, что хотя первые элементы блокировки 10054 расположены и совмещены в угловом положении относительно рельсовой направляющей стержня 10011, первые элементы блокировки 10054 не выполнены с возможностью того, чтобы препятствовать или по меньшей мере по существу препятствовать дистальному движению дистального шкива шарнира 10040. Когда дистальный шкив шарнира 10040 и блокировка шарнира 10050 скользят дистально, как описано выше, первые элементы блокировки 10054 могут скользить дистально вдоль рельсовой направляющей рамы 10011, в различных ситуациях без изменения или по меньшей мере без изменения по существу их углового совмещения в отношении рельсовой направляющей 10011. Хотя первые элементы блокировки 10054 допускают дистальное перемещение дистального шкива шарнира 10040 и блокировку шарнира 10050, первые элементы блокировки 10054 могут быть выполнены с возможностью избирательного предотвращения или по меньшей мере затруднения проксимального перемещения дистального шкива шарнира 10040, как описано выше.
В свете указанного выше блокировка шарнира 10050 в заблокированном состоянии может быть выполнена с возможностью сопротивления проксимальным и дистальным перемещениям дистального шкива шарнира 10040. В том, что касается сопротивления, блокировка шарнира 10050 может быть выполнена с возможностью предотвращения или по меньшей мере предотвращения по существу проксимального и дистального перемещений дистального шкива шарнира 10040. В совокупности сопротивление проксимальному движению дистального шкива шарнира 10040 оказывают первые элементы блокировки 10054, когда первые элементы блокировки 10054 находятся в их заблокированной ориентации, а сопротивление дистальному движению дистального шкива шарнира 10040 оказывают вторые элементы блокировки 10056, когда вторые элементы блокировки 10056 находятся в их заблокированной ориентации, как описано выше. Иными словами, первые элементы блокировки 10054 содержат первую одностороннюю блокировку, а вторые элементы блокировки 10056 содержат вторую одностороннюю блокировку, которая осуществляет блокировку в противоположном направлении.
Когда первые элементы блокировки 10054 находятся в заблокированной конфигурации, как показано на ФИГ. 102 и как описано выше, попытка переместить дистальный шкив шарнира 10040 проксимально может использоваться только для дополнительного уменьшения угла между первыми элементами блокировки 10054 и рельсовой направляющей рамы 10011. В различных обстоятельствах первые элементы блокировки 10054 могут изгибаться, а по меньшей мере в некоторых обстоятельствах первые элементы блокировки 10054 могут упираться в дистальный буртик 10047, образованный в первой полости блокировки 10044. Точнее говоря, самый внешний из первых элементов блокировки 10054 может упираться в дистальный буртик 10047, а другие первые элементы блокировки 10054 могут упираться в смежный первый элемент блокировки 10054. В некоторых обстоятельствах дистальный буртик 10047 может препятствовать перемещению первых элементов блокировки 10054. В некоторых обстоятельствах дистальный буртик 10047 может обеспечивать снижение напряжения. Например, когда дистальный буртик 10047 находится в контакте с первыми элементами блокировки 10054, дистальный буртик 10047 может поддерживать первые элементы блокировки 10054 в месте, которое смежно или по меньшей мере по существу смежно с рельсовой направляющей блокировки 10011 так, что противоположные усилия, передаваемые через первые элементы блокировки 10054, находящиеся в их разных местах, разделены только небольшим плечом рычага или плечом кручения. В результате этого в таких обстоятельствах усилие, передаваемое через хвостовики 10053 первых элементов блокировки 10054, может быть снижено или устранено.
Аналогично указанному выше, когда вторые элементы блокировки 10056 находятся в заблокированной конфигурации, как показано на ФИГ. 102 и как описано выше, попытка переместить дистальный шкив шарнира 10040 дистально может дополнительно использоваться только для уменьшения угла между вторыми элементами блокировки 10056 и рельсовой направляющей рамы 10011. В различных обстоятельствах вторые элементы блокировки 10056 могут изгибаться, а по меньшей мере в некоторых обстоятельствах вторые элементы блокировки 10056 могут упираться в проксимальный буртик 10048, образованный во второй полости блокировки 10046. Точнее говоря, самый наружный из вторых элементов блокировки 10056 может упираться в проксимальный буртик 10048, а другие вторые элементы блокировки 10056 могут упираться в смежный второй элемент блокировки 10056. В некоторых обстоятельствах проксимальный буртик 10048 может препятствовать перемещению вторых элементов блокировки 10056. В некоторых обстоятельствах проксимальный буртик 10048 может обеспечивать уменьшение напряжения. Например, когда проксимальный буртик 10048 находится в контакте со вторыми элементами блокировки 10056, проксимальный буртик 10048 может поддерживать вторые элементы блокировки 10056 в месте, смежном или по меньшей мере по существу смежном с рельсовой направляющей блокировки 10011 так, что противоположные усилия, передаваемые через вторые элементы блокировки 10056, находящиеся в их разных местах, разделены только небольшим плечом рычага или плечом кручения. В результате этого в таких обстоятельствах усилие, передаваемое через хвостовики 10058 вторых элементов блокировки 10056, может быть уменьшено или устранено.
Как описано в связи с примером осуществления, показанном на ФИГ. 102-112, исходное проксимальное перемещение проксимального шкива шарнира 10030 может разблокировать проксимальное перемещение дистального шкива шарнира 10040 и блокировки шарнира 10050, в то время как дополнительно проксимальное перемещение проксимального шкива шарнира 10030 может привести в действие дистальный шкив шарнира 10040 и блокировку шарнира 10050 проксимально. Аналогичным образом, исходное дистальное перемещение проксимального шкива шарнира 10030 может разблокировать дистальное перемещение дистального шкива шарнира 10040 и блокировки шарнира 10050, в то время как дополнительное дистальное перемещение проксимального шкива шарнира 10030 может привести в действие дистальный шкив шарнира 10040 и блокировку шарнира 10050 дистально. Такой общий принцип описан в связи с несколькими дополнительными примерами осуществления, раскрытыми ниже. В случае если такое описание является дублирующим или по существу дополняющим описание в связи с примером осуществления, раскрытым на ФИГ. 102-112, такое описание для краткости не будет приведено повторно.
Как показано на ФИГ. 113 и 114, хирургический инструмент, такой как, например, хирургический инструмент 10000, и/или любая другая система хирургического инструмента может содержать проксимальный шкив шарнира 10130, дистальный шкив шарнира 10140 и блокировку шарнира 10150. Блокировка шарнира 10150 может содержать раму 10152, которая может включать в себя прорезь, или канал блокировки, 10151, образованный в ней, выполненный с возможностью принимать по меньшей мере часть проксимального шкива шарнира 10130 и по меньшей мере часть дистального шкива шарнира 10140. Блокировка шарнира 10150 дополнительно может содержать первый элемент блокировки 10154, расположенный внутри первой, или дистальной, полости блокировки 10144, и второй элемент блокировки 10155, расположенный внутри второй, или проксимальной, полости блокировки 10146. Аналогично указанному выше, первый элемент блокировки 10154 может быть выполнен с возможностью сопротивляться проксимальному толкающему усилию P, переданному через дистальный шкив шарнира 10140. Для этого дистальный шкив шарнира 10140 может включать в себя выемку блокировки 10145, образованную в нем, которая может включать в себя одну или более поверхностей блокировки, выполненных с возможностью зацеплять первый элемент блокировки 10154 и предотвращать перемещение дистального шкива шарнира 10140 относительно рамы блокировки 10152. Более конкретно, боковая стенка выемки блокировки 10145 может содержать первую, или дистальную, поверхность блокировки 10141, которая может быть выполнена с возможностью создания клина для первого элемента блокировки 10154 с боковой стенкой, или стенкой блокировки, 10153 канала блокировки 10151, и благодаря такому заклиниванию дистальный шкив шарнира 10140 не будет иметь возможности проходить между первым элементом блокировки 10154 и противоположной боковой стенкой 10157 канала блокировки 10151. Читателю будет понятно, что выемка блокировки 10145 имеет такую форму, что ее глубина постепенно уменьшается в направлении дистального конца выемки блокировки 10145, причем, соответствующим образом, постепенно возрастает толщина дистального шкива шарнира 10140 в направлении дистального конца выемки блокировки 10145. В результате этого проксимальное толкающее усилие P, приложенное к дистальному шкиву шарнира 10140, может только дополнительно усиливать сопротивление или силу заклинивания, удерживающую дистальный шкив шарнира 10140 в положении.
Для вытягивания дистального шкива шарнира 10140 проксимально проксимальный шкив шарнира 10130 может быть выполнен с возможностью, во-первых, смещения дистального элемента блокировки 10154 проксимально для разблокирования блокировки шарнира 10150 в проксимальном направлении и, во-вторых, непосредственного зацепления с дистальным шкивом шарнира 10140 и приложения к ней вытягивающей силы. Более конкретно, в дополнение к указанному выше, проксимальный шкив шарнира 10130 может содержать дистальное плечо 10134, выполненное с возможностью исходно зацеплять первый элемент блокировки 10154, и проксимальное плечо 10136, выполненное с возможностью последующего зацепления за проксимальную приводную стенку 10147, образованную на проксимальном конце выемки блокировки 10145, и вытягивания дистального шкива шарнира 10140 проксимально. Аналогично указанному выше, проксимальное перемещение дистального шкива шарнира 10140 может быть выполнено с возможностью шарнирного поворота концевого эффектора хирургического инструмента. После того как концевой эффектор был надлежащим образом шарнирно повернут, проксимальный шкив шарнира 10130 может высвобождаться, что в различных ситуациях позволяет пружине 10155, расположенной в промежутке между первым элементом блокировки 10154 и вторым элементом блокировки 10156, расширяться и в достаточной степени изменять положение первого элемента блокировки 10154 относительно первой поверхности блокировки 10141 и повторно блокировать дистальный шкив шарнира 10140 и концевой эффектор в положении.
Одновременно с указанным выше, второй элемент блокировки 10156 может не сопротивляться или по меньшей мере по существу не сопротивляться проксимальному перемещению дистального шкива шарнира 10140. Когда блокировка шарнира 10150 находится в заблокированном состоянии, второй элемент блокировки 10156 может быть расположен между второй, или проксимальной, поверхностью блокировки 10143 выемки блокировки 10145 и стенкой блокировки 10153 канала блокировки 10151. Когда дистальный шкив шарнира 10140 вытягивается проксимально с помощью проксимального шкива шарнира 10130, в дополнение к указанному выше стопорная часть 10142 выемки блокировки 10145 может перемещаться поверх второго элемента блокировки 10156. В различных обстоятельствах стопорная часть 10142 выемки блокировки 10145 может содержать самую широкую часть выемки 10145, которая в результате этого допускает относительное скользящее перемещение между дистальным шкивом шарнира 10140 и вторым элементом блокировки 10156 по мере вытягивания дистального шкива шарнира 10140 проксимально. В некоторых обстоятельствах второй элемент блокировки 10156 может быть выполнен с возможностью качения внутри стопорной части 10142, посредством чего снижается усилие сопротивления между дистальным шкивом шарнира 10140 и вторым элементом блокировки 10156. Читателю будет понятно, что второй элемент блокировки 10156 может допускать проксимальное перемещение дистального шкива шарнира 10140, но может быть выполнен с возможностью избирательного сопротивления дистальному перемещению дистального шкива шарнира 10140, как дополнительно более подробно описано ниже.
Аналогично указанному выше, второй элемент блокировки 10156 может быть выполнен с возможностью сопротивления дистальному вытягивающему усилию D, переданному через дистальный шкив шарнира 10140. Для этого вторая поверхность блокировки 10143 выемки блокировки 10145 может быть выполнена с возможностью создания клина для второго элемента блокировки 10156 со стенкой блокировки 10153 канала блокировки 10151, и благодаря такому заклиниванию дистальный шкив шарнира 10140 не будет иметь возможность проходить между вторым элементом блокировки 10156 и противоположной боковой стенкой 10157 канала блокировки 10151. Читателю будет понятно, что выемка блокировки 10145 имеет такую форму, что ее глубина постепенно уменьшается в направлении проксимального конца выемки блокировки 10145, причем соответствующим образом постепенно возрастает толщина дистального шкива шарнира 10140 в направлении проксимального конца выемки блокировки 10145. В результате этого дистальное вытягивающее усилие D, приложенное к дистальному шкиву шарнира 10140, может использовать только для того, чтобы дополнительно увеличить усилие сопротивления или заклинивания, удерживающее дистальный шкив шарнира 10140 в положении.
Для выталкивания дистального шкива шарнира 10140 дистально проксимальный шкив шарнира 10130 может быть выполнен с возможностью, во-первых, смещения второго элемента блокировки 10156 дистально для разблокирования блокировки шарнира 10150 и, во-вторых, непосредственного зацепления с дистальным шкивом шарнира 10140 и приложения к нему дистального толкающего усилия. Более конкретно, в дополнение к указанному выше, проксимальное плечо 10136 проксимального шкива шарнира 10130 может быть выполнено с возможностью исходно зацеплять второй элемент блокировки 10156, причем затем дистальное плечо 10134 может зацепляться за дистальную приводную стенку 10148, образованную на дистальном конце выемки блокировки 10145, и выталкивать дистальный шкив шарнира 10140 дистально. Аналогично указанному выше, дистальное перемещение дистального шкива шарнира 10140 может быть выполнено с возможностью шарнирного поворота концевого эффектора хирургического инструмента. После того как концевой эффектор был надлежащим образом шарнирно повернут, проксимальный шкив шарнира 10130 может высвобождаться, что в различных обстоятельствах позволяет пружине 10155 расширяться и в достаточной степени изменять положение второго элемента блокировки 10156 относительно второй поверхности блокировки 10143 для повторной блокировки дистального шкива шарнира 10140 и концевого эффектора в положении.
Одновременно с указанным выше, первый элемент блокировки 10154 может не сопротивляться или по меньшей мере по существу не сопротивляться дистальному перемещению дистального шкива шарнира 10140. Когда блокировка шарнира 10150 находится в заблокированном состоянии, первый элемент блокировки 10154 может быть расположен между первой поверхностью блокировки 10141 выемки блокировки 10145 и стенкой блокировки 10153 канала блокировки 10151, как описано выше. Когда дистальный шкив шарнира 10140 толкается дистально с помощью проксимального шкива шарнира 10130, в дополнение к указанному выше стопорная часть 10142 выемки блокировки 10145 может перемещаться поверх первого элемента блокировки 10154. В различных обстоятельствах стопорная часть 10142 может допускать относительное скользящее перемещение между дистальным шкивом шарнира 10140 и первым элементом блокировки 10154 по мере того, как дистальный шкив шарнира 10140 толкается дистально. В некоторых обстоятельствах первый элемент блокировки 10154 может быть выполнен с возможностью качения внутри стопорной части 10142, посредством чего уменьшается усилие сопротивления между дистальным шкивом шарнира 10140 и первым элементом блокировки 10154. Читателю будет понятно, что первый элемент блокировки 10154 может допускать дистальное перемещение дистального шкива шарнира 10140, но может избирательно сопротивляться проксимальному перемещению дистального шкива шарнира 10140, как описано выше.
В дополнение к указанному выше, первая поверхность блокировки 10141, стопор 10142 и вторая поверхность блокировки 10143 выемки блокировки 10145 могут образовывать надлежащую форму. Такая форма может быть образована первой, второй и третьей плоскими поверхностями, которые содержат первую поверхность блокировки 10141, стопор 10142 и вторую поверхность блокировки 10143 соответственно. В таких обстоятельствах между первой поверхностью блокировки 10141, стопором 10142 и второй поверхностью блокировки 10143 могут быть выявлены четкие разрывы. В различных обстоятельствах первая поверхность блокировки 10141, стопор 10142 и вторая поверхность блокировки 10143 могут содержать непрерывную поверхность, например, такую как дугообразная поверхность, причем четких разрывов между первой поверхностью блокировки 10141, стопором 10142 и второй поверхностью блокировки 10143 может не быть.
Как показано на ФИГ. 115 и 116, хирургический инструмент, например, такой как хирургический инструмент 10000, и/или любая другая система хирургического инструмента могут содержать стержень 10210, систему шкива шарнира, содержащую проксимальный шкив шарнира 10230 и дистальный шкив шарнира 10240, а также блокировку шарнира 10250, выполненную с возможностью разъемно удерживать дистальный шкив шарнира 10240 в положении. Общая работа системы шкива шарнира аналогична или по меньшей мере по существу аналогична системе шкива шарнира, описанной в связи с вариантом осуществления, раскрытом на ФИГ. 113 и 114, и в результате этого для краткости такое описание повторяться не будет. Читателю будет понятно, что, как показано на ФИГ. 115 и 116, блокировка шарнира 10250 может содержать первый элемент блокировки 10254, способный обеспечить одностороннюю блокировку, выполненную с возможностью разъемно затруднять проксимальное перемещение дистального шкива шарнира 10240, и второй элемент блокировки 10256, способный обеспечить вторую одностороннюю блокировку, выполненную с возможностью разъемно затруднять дистальное перемещение дистального шкива шарнира 10240. Аналогично указанному выше, первый элемент блокировки 10254 и второй элемент блокировки 10256 могут быть расположены внутри выемки блокировки 10245, образованной в дистальном шкиве шарнира 10240, и могут смещаться в заблокированное состояние, например, с помощью смещающего элемента, или пружины 10255. Для разблокирования первого элемента блокировки 10254, аналогично указанному выше, проксимальный шкив шарнира 10230 может быть вытянут проксимально так, что дистальный крюк 10234 входит в контакт с первым элементом блокировки 10254 и вытягивает первый элемент блокировки 10254 проксимально. После этого проксимальный шкив шарнира 10230 может быть вытянут дополнительно проксимально до тех пор, пока дистальный крюк 10234 не войдет в контакт с рамой дистального шкива шарнира 10242, не вытянет дистальный шкив шарнира 10240 проксимально и не повернет шарнирно концевой эффектор 10020, аналогично описанным выше вариантам осуществления. Для разблокирования второго элемента блокировки 10256, аналогично указанному выше, проксимальный шкив шарнира 10230 можно протолкнуть дистально так, чтобы проксимальный крюк 10236 вошел в контакт со вторым элементом блокировки 10256 и толкнул второй элемент блокировки 10256 дистально. После этого проксимальный шкив шарнира 10230 может быть дополнительно протолкнут дистально до тех пор, пока проксимальный крюк 10236 не войдет в контакт с рамой дистального шкива шарнира 10242, не протолкнет дистальный шкив шарнира 10240 дистально и не повернет шарнирно концевой эффектор 10020 в противоположном направлении, аналогично описанным выше вариантам осуществления. В различных обстоятельствах каждый из первого элемента блокировки 10254 и второго элемента блокировки 10256 может содержать, например, поворачиваемый сферический элемент, или подшипник, который может быть выполнен с возможностью снижения трения скольжения между элементами блокировки 10254, 10256, рамой стержня 10212, проксимальным шкивом шарнира 10230 и/или дистальным шкивом шарнира 10240.
Как показано на ФИГ. 125-130, хирургический инструмент, например, такой как хирургический инструмент 10000, и/или любая другая система хирургического инструмента, могут содержать систему шкива шарнира, содержащую проксимальный шкив шарнира 10330 и дистальный шкив шарнира 10340, а также блокировку шарнира 10350, выполненную с возможностью разъемно удерживать дистальный шкив шарнира 10340 в положении. Во многих аспектах общая работа системы шкива шарнира такая же или по меньшей мере по существу аналогична системе шкива шарнира, описанной в связи с вариантами осуществления, раскрытыми выше, и в результате этого такие аспекты для краткости не будут повторены в настоящем документе. Читателю будет понятно, что, как показано преимущественно на ФИГ. 125 и 126, блокировка шарнира 10350 может содержать первый элемент блокировки 10354, который может обеспечивать одностороннюю блокировку, выполненную с возможностью разъемно затруднять проксимальное перемещение дистального шкива шарнира 10340, и второй элемент блокировки 10356, который может обеспечивать вторую одностороннюю блокировку, выполненную с возможностью разъемно затруднять дистальное перемещение дистального шкива шарнира 10340. Аналогично указанному выше, первый элемент блокировки 10354 может быть расположен внутри первой, или дистальной, выемки блокировки 10344, а второй элемент блокировки 10356 может быть расположен внутри второй, или проксимальной, выемки блокировки 10346, образованной в дистальном шкиве шарнира 10340, и может смещаться в заблокированное состояние, например, с помощью смещающего элемента, или пружины, 10355. Для разблокирования первого элемента блокировки 10354, как показано по существу на ФИГ. 129, проксимальный шкив шарнира 10330 может вытягиваться проксимально так, что дистальный крюк 10334 входит в контакт с первым элементом блокировки 10354 и вытягивает первый элемент блокировки 10354 проксимально. После этого, как показано на ФИГ. 129, проксимальный шкив шарнира 10330 может быть дополнительно вытянут проксимально до тех пор, пока первый элемент блокировки 10354 не войдет в контакт с промежуточным буртиком 10345, проходящим от рамы 10342 рамы шкива шарнира 10340 и не вытянет дистальный шкив шарнира 10340 проксимально для шарнирного поворота концевого эффектора, аналогично описанным выше вариантам осуществления. После того как концевой эффектор был в достаточной степени шарнирно повернут, проксимальный шкив шарнира 10330 может быть высвобожден, что может позволить смещающей пружине 10355 сместить элементы блокировки 10354 и 10356 друг от друга и вставить элементы блокировки 10354 и 10356 в заблокированное состояние, как показано на ФИГ. 130. Для разблокирования второго элемента блокировки 10356, как показано по существу на ФИГ. 127, проксимальный шкив шарнира 10330 можно протолкнуть дистально так, что проксимальный крюк 10336 войдет в контакт со вторым элементом блокировки 10356 и протолкнет второй элемент блокировки 10356 дистально. После этого проксимальный шкив шарнира 10330 может быть протолкнут дополнительно дистально до тех пор, пока второй элемент блокировки 10356 не войдет в контакт с промежуточным буртиком 10345 рамы дистального шкива шарнира 10342 и не протолкнет дистальный шкив шарнира 10340 дистально, чтобы шарнирно повернуть концевой эффектор в противоположном направлении, аналогично описанным выше вариантам осуществления. После того как концевой эффектор в достаточной степени шарнирно повернется, аналогично указанному выше, проксимальный шкив шарнира 10330 может высвободиться, что может позволить смещающей пружине 10355 сместить элементы блокировки 10354 и 10356 друг от друга и вставить элементы блокировки 10354 и 10356 в заблокированное состояние, как показано на ФИГ. 128.
В различных обстоятельствах, в дополнение к указанному выше, каждый из первого элемента блокировки 10354 и второго элемента блокировки 10356 может содержать, например, клин, который может быть выполнен с возможностью блокировки дистального шкива шарнира 10340 в положении. Как также показано преимущественно на ФИГ. 125 и 126, блокировка шарнира 10350 может содержать раму 10352, включающую канал блокировки 10351, образованный в ней, который может быть выполнен с возможностью принимать по меньшей мере часть проксимального шкива шарнира 10330 и по меньшей мере часть дистального шкива шарнира 10340. В дополнение к указанному выше, между дистальным шкивом шарнира 10340 и стенкой блокировки 10353 канала блокировки 10351 может быть образована первая полость блокировки 10344. Когда проксимальная нагрузка P передается на дистальный шкив шарнира 10340 от концевого эффектора, дистальный шкив шарнира 10340 может зацепляться за клиновидную часть 10358 первого элемента блокировки 10354 и смещать первый элемент блокировки 10354 к стенке блокировки 10353. В таких обстоятельствах проксимальная нагрузка P может только увеличить заклинивающее усилие, удерживающее первый элемент блокировки 10354 в положении. В результате этого первый элемент блокировки 10354 может содержать одностороннюю блокировку, которая может затруднять проксимальное перемещение дистального шкива шарнира 10340 до тех пор, пока первый элемент блокировки 10354 не будет разблокирован, как описано выше. Когда первый элемент блокировки 10354 разблокирован и дистальный шкив шарнира 10340 перемещается проксимально, второй элемент блокировки 10356 может не сопротивляться или по меньшей мере по существу не сопротивляться проксимальному перемещению дистального шкива шарнира 10340. Аналогично указанному выше и в дополнение к указанному выше, между дистальным шкивом шарнира 10340 и стенкой блокировки 10353 может быть образована вторая полость блокировки 10346. Когда дистальная нагрузка D передается на дистальный шкив шарнира 10340 от концевого эффектора, дистальный шкив шарнира 10340 может зацепляться за клиновидную часть 10359 второго элемента блокировки 10356 и смещать второй элемент блокировки 10356 к стенке блокировки 10353. В таких обстоятельствах дистальная нагрузка D может только увеличивать заклинивающее усилие, удерживающее второй элемент блокировки 10356 в положении. В результате этого второй элемент блокировки 10356 может содержать одностороннюю блокировку, которая может затруднять дистальное перемещение дистального шкива шарнира 10340 до тех пор, пока второй элемент блокировки 10356 не будет разблокирован, как описано выше. Когда первый элемент блокировки 10356 разблокирован и дистальный шкив шарнира 10340 перемещается дистально, первый элемент блокировки 10354 может не сопротивляться или по меньшей мере по существу не сопротивляться дистальному перемещению дистального шкива шарнира 10340.
Как показано на ФИГ. 117-124, хирургический инструмент, например, такой как хирургический инструмент 10000, и/или любая другая система хирургического инструмента могут содержать систему шкива шарнира, содержащую проксимальный шкив шарнира 10430 и дистальный шкив шарнира 10440, а также блокировку шарнира 10450, выполненную с возможностью разъемно удерживать дистальный шкив шарнира 10440 в положении. Читателю будет понятно, что, как показано преимущественно на ФИГ. 117 и 118, блокировка шарнира 10450 может содержать первый кулачок блокировки 10454, который может обеспечивать одностороннюю блокировку, выполненную с возможностью разъемно затруднять дистальное перемещение дистального шкива шарнира 10440, и второй кулачок блокировки 10456, который может обеспечивать вторую одностороннюю блокировку, выполненную с возможностью разъемно затруднять проксимальное перемещение дистального шкива шарнира 10440. Первый кулачок блокировки 10454 может быть поворотно примонтирован к дистальному шкиву шарнира 10440 и может включать в себя выступ 10457, поворотно расположенный внутри шарнирного отверстия 10447, образованного в дистальном шкиве шарнира 10440. Аналогичным образом, второй кулачок блокировки 10456 может быть поворотно примонтирован к дистальному шкиву шарнира 10440 и может включать в себя выступ 10458, поворотно расположенный внутри шарнирного отверстия 10448, также образованного в дистальном шкиве шарнира 10440. Блокировка шарнира 10450 дополнительно может содержать раму 10452, имеющую канал блокировки 10451, образованный в ней, который может быть выполнен с возможностью принимать по меньшей мере часть проксимального шкива шарнира 10430, по меньшей мере часть дистального шкива шарнира 10440, первый кулачок блокировки 10454 и второй кулачок блокировки 10456. Канал блокировки 10451 может содержать первую стенку блокировки 10453 и вторую стенку блокировки 10459, причем когда блокировка шарнира 10450 находится в заблокированном состоянии, первый кулачок блокировки 10454 может смещаться в зацепление с первой стенкой блокировки 10453, а второй кулачок блокировки 10456 может смещаться в зацепление со второй стенкой блокировки 10459. Первый кулачок блокировки 10454 может быть выполнен с возможностью смещать первую точку опоры 10445 дистального шкива шарнира 10440 ко второй стенке блокировки 10459, когда первый кулачок блокировки 10454 находится в его заблокированном положении. Аналогичным образом, второй кулачок блокировки 10456 может быть выполнен с возможностью смещать вторую точку опоры 10446 дистального шкива шарнира 10440 к первой стенке блокировки 10453, когда второй кулачок блокировки 10454 находится в его заблокированном положении. Такое заблокированное состояние показано на ФИГ. 119. Как также показано на ФИГ. 119, блокировка шарнира 10450 может быть смещена в заблокированное состояние с помощью пружины 10455. Пружина 10455 может быть выполнена с возможностью поворачивать первый кулачок блокировки 10454 вокруг его выступа 10457 так, чтобы выступающая часть первого кулачка блокировки 10454 зацеплялась за первую стенку блокировки 10453, и, аналогичным образом, поворачивать второй кулачок блокировки 10456 вокруг его выступа 10458 так, чтобы выступающая часть второго кулачка блокировки 10456 зацеплялась за вторую стенку блокировки 10459. В различных обстоятельства каждый из первого кулачка блокировки 10454 и второго кулачка блокировки 10456 могут содержать отверстие для пружины 10449, образованное в нем, которое может быть выполнено с возможность принимать конец пружины 10455 так, чтобы пружина 10455 могла прилагать описанные выше смещающие усилия.
Для разблокирования первого кулачка блокировки 10454, как показано по существу на ФИГ. 120, проксимальный шкив шарнира 10430 может быть протолкнут дистально так, чтобы дистальный буртик привода 10434 проксимального шкива шарнира 10430 вошел в контакт с первым кулачком блокировки 10454 и протолкнул первый кулачок блокировки 10454 дистально. В различных обстоятельствах первый кулачок блокировки 10454 может содержать проходящий от него приводной штифт 10437, который может входить в контакт с дистальным буртиком привода 10434 так, что по мере того, как проксимальный шкив шарнира 10430 проталкивается дистально, первый кулачок блокировки 10454 и дистальный шкив шарнира 10440 могут скользить дистально относительно первой поверхности блокировки 10451. В некоторых обстоятельствах первый кулачок блокировки 10454 может поворачиваться вокруг его выступа 10447, чтобы приспособиться к такому перемещению. В любом случае, аналогично указанному выше, дистальное перемещение дистального шкива шарнира 10440 может шарнирно поворачивать концевой эффектор. После того как концевой эффектор в достаточной степени шарнирно повернулся, проксимальный шкив шарнира 10430 может быть высвобожден, что может позволить смещающей пружине 10455 сместить кулачки блокировки 10454 и 10456 в зацепление с поверхностями блокировки 10453 и 10459, соответственно, и разместить блокировку шарнира 10450 в ее заблокированное состояние, как показано на ФИГ. 119. Для разблокирования второго кулачка блокировки 10456, как показано по существу на ФИГ. 121, проксимальный шкив шарнира 10430 можно вытянуть проксимально так, чтобы проксимальный буртик привода 10436 вошел в контакт со вторым кулачком блокировки 10456 и вытянул второй кулачок блокировки 10456 проксимально. В различных обстоятельствах второй кулачок блокировки 10456 может содержать проходящий от него приводной штифт 10438, который может входить в контакт с проксимальным буртиком привода 10436 так, что по мере того как проксимальный шкив шарнира 10430 вытягивается проксимально, второй кулачок блокировки 10456 и дистальный шкив шарнира 10440 могут скользить проксимально относительно второй поверхности блокировки 10459. В некоторых обстоятельствах второй кулачок блокировки 10456 может поворачиваться вокруг его выступа 10458, чтобы приспособиться к такому перемещению. В любом случае, аналогично указанному выше, проксимальное перемещение дистального шкива шарнира 10440 может шарнирно поворачивать концевой эффектор в противоположном направлении. Аналогично указанному выше, после того как концевой эффектор шарнирно повернут в достаточной степени, проксимальный шкив шарнира 10430 может быть высвобожден, что может позволить смещающей пружине 10455 сместить кулачки блокировки 10454 и 10456 в зацепление с поверхностями блокировки 10453 и 10459, соответственно, и разместить блокировку шарнира 10450 в ее заблокированное состояние, как показано на ФИГ. 119.
В дополнение к указанному выше, когда проксимальная нагрузка P передается на дистальный шкив шарнира 10440 от концевого эффектора при нахождении блокировки шарнира 10450 в ее заблокированном состоянии, второй кулачок блокировки 10456 будет дополнительно смещаться в зацепление со стенкой блокировки 10459. В таких обстоятельствах проксимальная нагрузка P может только увеличивать заклинивающее усилие, удерживающее второй кулачок блокировки 10456 в положении. В результате этого второй кулачок блокировки 10456 может содержать одностороннюю блокировку, которая может затруднять проксимальное перемещение дистального шкива шарнира 10440 до тех пор, пока второй кулачок блокировки 10456 не будет разблокирован, как описано выше. Когда второй кулачок блокировки 10454 разблокирован и дистальный шкив шарнира 10440 перемещается проксимально, первый кулачок блокировки 10456 может не сопротивляться или по меньшей мере по существу не сопротивляться проксимальному перемещению дистального шкива шарнира 10440. Когда дистальная нагрузка D передается на дистальный шкив шарнира 10440 от концевого эффектора при нахождении блокировки шарнира 10450 в ее заблокированном состоянии, первый кулачок блокировки 10454 будет дополнительно смещаться в зацепление со стенкой блокировки 10453. В таких обстоятельствах дистальная нагрузка D может только увеличивать заклинивающее усилие, удерживающее первый кулачок блокировки 10454 в положении. В результате этого первый кулачок блокировки 10454 может содержать одностороннюю блокировку, которая может затруднять дистальное перемещение дистального шкива шарнира 10440 до тех пор, пока первый кулачок блокировки 10454 не будет разблокирован, как описано выше. Когда первый кулачок блокировки 10454 разблокирован и дистальный шкив шарнира 10440 перемещается дистально, второй кулачок блокировки 10454 может не сопротивляться или по меньшей мере по существу не сопротивляться дистальному перемещению дистального шкива шарнира 10440.
Как описано выше, хирургический инструмент может содержать пусковой привод для обработки ткани, захваченной внутри концевого эффектора хирургического инструмента, привод шарнира для шарнирного поворота концевого эффектора вокруг шарнирного сочленения, а также узел сцепления, который может использоваться для избирательного зацепления привода шарнира с пусковым приводом. Пример узла сцепления 10070 был описан выше, в то время как ниже описан другой пример узла сцепления, т.е. узел сцепления 11070. В различных обстоятельствах в хирургических инструментах, раскрытых в настоящем документе, может использоваться любой узел сцепления.
Как показано на ФИГ. 131-149, в хирургическом инструменте может использоваться узел стержня 11010, который может включать в себя концевой эффектор 10020, шарнирное сочленение 10090 и блокировку шарнира 10050, которая может быть выполнена с возможностью разъемно удерживать концевой эффектор 10020 в положении. Читателю будет понятно, что части концевого эффектора 10020 на ФИГ. 131-133 были удалены для целей иллюстрации, однако концевой эффектор 10020 может включать в себя расположенную в нем кассету со скобами и/или упор, поворотно соединенный с каналом, поддерживающим кассету со скобами. Работа концевого эффектора 10020, шарнирного сочленения 10090 и блокировки шарнира 10050 была описана выше, и для краткости не будет повторяться в настоящем документе. Узел стержня 11010 дополнительно может включать в себя проксимальный кожух, например, состоящий из частей кожуха 11002 и 11003, который может соединять узел стержня 11010 с рукояткой хирургического инструмента. Узел стержня 11010 дополнительно может включать в себя закрывающую трубку 11015, которая может использоваться для закрытия и/или открытия упора концевого эффектора 10020. Как показано преимущественно на ФИГ. 132-134, узел стержня 11010 может включать в себя цапфу 11004, которая может быть выполнена с возможностью неподвижно поддерживать часть рамы стержня 10012, как описано выше в связи с блокировкой шарнира 10050. Цапфа 11004 может быть выполнена с возможностью, во-первых, скользящей поддержки пускового элемента 11060 в ней, а, во-вторых, скользящей поддержки закрывающей трубки 11015, которая проходит вокруг цапфы 11004. Цапфа 11004 также может быть выполнена с возможностью скользящей поддержки проксимального шкива шарнира 11030. В различных обстоятельствах цапфа 11004 может содержать проксимальный конец 11009, который поддерживается частью рамы 11001, которая может быть выполнена с возможностью поворота цапфы 11004 вокруг ее продольной оси.
В дополнение к указанному выше, узел стержня 11010 может включать в себя узел сцепления 11070, который может быть выполнен с возможностью избирательно и разъемно соединять проксимальный шкив шарнира 11030 и пусковой элемент 11060. Узел сцепления 11070 может содержать кольцо блокировки, или гильзу, 11072, расположенную вокруг пускового элемента 11060, причем гильза блокировки 11072 может поворачиваться между зацепленным положением, в котором гильза блокировки 11072 соединяет проксимальный шкив шарнира 11030 с пусковым элементом 11060, и расцепленным положением, в котором проксимальный шкив шарнира 11030 не соединен функционально с пусковым элементом 11060. Когда гильза блокировки 11072 находится в ее зацепленном положении (ФИГ. 135, 136, 138, 139, 141 и 145-149), в дополнение к указанному выше, дистальное перемещение пускового элемента 11060 может перемещать проксимальный шкив шарнира 11030 дистально и, соответственно, проксимальное перемещение пускового элемента 11060 может перемещать проксимальный шкив шарнира 11030 проксимально. Когда гильза блокировки 11072 находится в ее расцепленном положении (ФИГ. 142-144), перемещение пускового элемента 11060 не передается на проксимальный шкив шарнира 11030, и в результате этого пусковой элемент 11060 может перемещаться независимо от проксимального шкива шарнира 11030. В различных обстоятельствах проксимальный шкив шарнира 11030 может удерживаться в положении с помощью блокировки шарнира 11050, когда проксимальный шкив шарнира 11030 не перемещается в проксимальное или дистальное направления с помощью пускового элемента 11060.
Как показано преимущественно на ФИГ. 134, гильза блокировки 11072 может содержать цилиндрический или по меньшей мере по существу цилиндрический корпус, включающий продольное отверстие, образованное с возможностью принимать пусковой элемент 11060. Гильза блокировки 11072 может содержать первый обращенный внутрь элемент блокировки 11073 и второй обращенный наружу элемент блокировки 11078. Первый элемент блокировки 11073 может быть выполнен с возможностью избирательно зацепляться с пусковым элементом 11060. Более конкретно, когда гильза блокировки 11072 находится в ее зацепленном положении, первый элемент блокировки 11073 может быть расположен внутри приводной щели 11062, образованной в пусковом элементе 11060 так, что дистальное толкающее усилие и/или проксимальное вытягивающее усилие может быть передано от пускового элемента 11060 к гильзе блокировки 11072. Когда гильза блокировки 11072 находится в ее зацепленном положении, второй элемент блокировки 11078 может быть расположен внутри приводной щели 11035, образованной в проксимальном шкиве шарнира 11035 так, что дистальное толкающее усилие и/или проксимальное вытягивающее усилие, приложенное к гильзе блокировки 11072, может передаваться к проксимальному шкиву шарнира 11030. В результате этого когда гильза блокировки 11072 находится в ее зацепленном положении, пусковой элемент 11060, гильза блокировки 11072 и проксимальный шкив шарнира 11030 будут перемещаться вместе. С другой стороны, когда гильза блокировки 11072 находится в ее расцепленном положении, первый элемент блокировки 11073 может не быть расположен внутри приводной щели 11062 пускового элемента 11060, и в результате этого дистальное толкающее усилие и/или проксимальное вытягивающее усилие может не передаваться от пускового элемента 11060 к гильзе блокировки 11072. Соответственно, дистальное толкающее усилие и/или проксимальное вытягивающее усилие может не передаваться на проксимальный шкив шарнира 11030. В таких обстоятельствах пусковой элемент 11060 может скользить проксимально и/или дистально относительно гильзы блокировки 11072 и проксимального шкива шарнира 11030. Чтобы приспособиться к такому относительному перемещению, в таких обстоятельствах пусковой элемент 11060 может включать в себя продольную прорезь или канавку 11061, образованную в нем, которая может быть выполнена с возможностью принимать первый элемент блокировки 11073 гильзы блокировки 11072, когда гильза блокировки 11072 находится в ее расцепленном положении и, более этого, чтобы приспособиться к продольному перемещению пускового элемента 11060 относительно гильзы блокировки 11072. В различных обстоятельствах второй элемент блокировки 11078 может оставаться в зацеплении с приводной щелью 11035 в проксимальном шкиве шарнира 11030 независимо от того, находится ли гильза блокировки 11072 в ее зацепленном положении или в ее расцепленном положении.
В дополнение к указанному выше, узел сцепления 11070 дополнительно может содержать поворачиваемый исполнительный механизм блокировки 11074, который может быть выполнен с возможностью поворачивать гильзу блокировки 11072 между ее зацепленным положением и ее расцепленным положением. В различных обстоятельствах исполнительный механизм блокировки 11074 может содержать кольцо, которое может окружать гильзу блокировки 11072, продольное отверстие, проходящее через кольцо, и, как показано преимущественно на ФИГ. 135, проходящий внутрь приводной элемент 11077, зацепленный с гильзой блокировки 11072. Как также показано на ФИГ. 134, гильза блокировки 11072 может содержать продольную прорезь 11079, образованную в ней, в которую может быть принят приводной элемент 11077 исполнительного механизма блокировки 11074. Аналогично указанному выше, исполнительный механизм блокировки 11074 может быть перемещен между зацепленным положением, в котором исполнительный механизм блокировки 11074 может размещать гильзу блокировки 11072 в ее зацепленное положение, и расцепленным положением, в котором исполнительный механизм блокировки 11074 может размещать гильзу блокировки 11072 в ее расцепленное положение. Для перемещения гильзы блокировки 11072 между ее зацепленным положением и ее расцепленным положением исполнительный механизм блокировки 11074 может поворачиваться вокруг его продольной оси так, чтобы проходящий от него приводной элемент 11077 зацеплял боковую стенку прорези 11079, чтобы передать поворотное усилие на гильзу блокировки 11072. В различных обстоятельствах исполнительный механизм блокировки 11074 может быть ограничен так, чтобы он не перемещался продольно с гильзой блокировки 11072. В таких обстоятельствах исполнительный механизм исполнительного механизма блокировки 11074 может поворачиваться внутри по меньшей мере частично кольцевого окна 11089, образованного в цапфе стержня 11004. Чтобы приспособиться к продольному перемещению гильзы блокировки 11072, когда гильза блокировки 11072 находится в ее зацепленном положении, гильза блокировки 11072 дополнительно может включать в себя продольное отверстие 11079, внутри которого может перемещаться приводной элемент 11077. В различных обстоятельствах продольное отверстие 11079 может включать в себя центральную щель 11076, которая может соответствовать шарнирно неповернутому положению концевого эффектора 10020. В таких обстоятельствах центральная щель 11076 может служить в качестве стопора, выполненного, например, с возможностью разъемно удерживать или указывать центральную ориентацию концевого эффектора 10020.
В дополнение к указанному выше, как показано преимущественно на ФИГ. 134, исполнительный механизм блокировки 11074 дополнительно может содержать элемент, приводимый в действие кулачком, 11081, проходящий от него наружу, который может быть выполнен с возможностью принимать прилагаемое к нему усилие, чтобы поворачивать гильзу блокировки 11072, как описано выше. В различных обстоятельствах узел стержня 11010 дополнительно может содержать барабан переключателя 11075, который может быть выполнен с возможностью прилагать поворотное усилие к элементу, приводимому в действие кулачком, 11081. Барабан переключателя 11075 может проходить вокруг исполнительного механизма блокировки 11074 и может включать в себя продольную прорезь 11083, образованную в нем, внутри которой может быть размещен элемент, приводимый в действие кулачком, 11081. При повороте барабана переключателя 11075 боковая стенка прорези 11083 может входить в контакт с элементом, приводимым в действие кулачком, 11081 и поворачивать исполнительный механизм блокировки 11074, как кратко описано выше. Барабан переключателя 11075 дополнительно может содержать по меньшей мере частично кольцевые отверстия 11085, образованные в нем, которые, как показано на ФИГ. 137, могут быть выполнены с возможностью принимать кольцевые стойки 11007, проходящие от кожуха стержня, содержащего половины кожуха 11002 и 11003, и обеспечивать относительное поворачивание, но не поступательное перемещение, между барабаном переключателя 11075 и кожухом стержня. Как также показано на ФИГ. 134, барабан переключателя 11075 может использоваться для поворачивания исполнительного механизма блокировки 11074 и гильзы блокировки 11072 между их зацепленным и расцепленным положениями. В различных обстоятельствах узел стержня 11010 дополнительно может содержать смещающий элемент, например, такой как пружина 11080, которая может быть выполнена с возможностью смещать барабан переключателя 11075 в направлении, в котором исполнительный механизм блокировки 11074 и гильза блокировки 11072 смещаются в их зацепленные положения. Таким образом, по существу пружина 11080 и барабан переключателя 11075 могут быть выполнены с возможностью смещать систему привода шарнира в функциональное зацепление с системой пускового привода. Как также показано на ФИГ. 134, барабан переключателя 11075 может содержать части узла токосъемного кольца 11005, который может быть выполнен с возможностью проводить электрическое питание к и/или от концевого эффектора 10020 и/или сигналы связи к и/или от концевого эффектора 10020. Узел токосъемного кольца 11005 может содержать множество концентрических или по меньшей мере по существу концентрических проводников 11008 на их противоположных сторонах, которые могут быть выполнены с возможностью обеспечивать относительное поворачивание между половинами узла токосъемного кольца 11005 с поддержанием электропроводящих путей между ними. Заявка на патент США с серийным № 13/800,067, озаглавленная «СИСТЕМА ДАТЧИКА ТОЛЩИНЫ ТКАНИ КАССЕТЫ СО СКОБАМИ», поданная 13 марта 2013 г., которая полностью включена в настоящий документ путем ссылки. Заявка на патент США с серийным № 13/800,025, озаглавленная «СИСТЕМА ДАТЧИКА ТОЛЩИНЫ ТКАНИ КАССЕТЫ СО СКОБАМИ», поданная 13 марта 2013 г., которая полностью включена в настоящий документ путем ссылки.
В различных обстоятельствах, в дополнение к указанному выше, закрывающий механизм узла стержня 11010 может быть выполнен с возможностью смещать узел сцепления 11070 в его расцепленное состояние. Например, как показано преимущественно на ФИГ. 134 и 144-147, закрывающая трубка 11015 может быть продвинута дистально для закрытия упора концевого эффектора 10020, как описано выше, и в процессе этого отведения кулачком исполнительного механизма блокировки 11074 и, соответственно, гильзы блокировки 11072 в их расцепленные положения. Для этого закрывающая трубка 11015 может содержать криволинейное окно 11016, через которое может проходить элемент, приводимый в действие кулачком, 11081, проходящий от исполнительного механизма блокировки 11074. Криволинейное окно 11016 может включать в себя наклоненную боковую стенку, или криволинейный край, 11017, который может быть выполнен с возможностью зацеплять элемент, приводимый в действие кулачком, 11081 по мере того, как закрывающая трубка 11015 перемещается дистально между открытым, или незакрытым, положением (ФИГ. 145-149) в закрытое положение (ФИГ. 142-144) и поворачивать исполнительный механизм блокировки 11074 из его зацепленного положения (ФИГ. 145-149) в его расцепленное положение (ФИГ. 142-144). При сравнении ФИГ. 144 и 149 читателю будет понятно, что когда элемент, приводимый в действие кулачком, 11081 и исполнительный механизм блокировки 11074 отводятся кулачком в их расцепленное положение, элемент, приводимый в действие кулачком, 11081 может поворачивать барабан переключателя 11075 и сжимать пружину 11080 между барабаном переключателя 11075 и кожухом стержня. Поскольку закрывающая трубка 11015 остается в ее продвинутом закрытом положении, привод шарнира будет отсоединен от пускового привода. Чтобы повторно зацепить привод шарнира и пусковой привод, закрывающую трубку 11015 можно оттянуть в ее неактивированное положение, которое также может открывать концевой эффектор 10020 и в результате этого вытягивать криволинейный край 11017 проксимально, позволяя пружине 11080 повторно смещать исполнительный механизм блокировки 11074 и гильзу блокировки 11072 в их зацепленные положения.
Как более подробно описано в других частях документа, хирургический инструмент 1010 может включать в себя несколько рабочих систем, которые по меньшей мере частично проходят через стержень 1210 и находятся в функциональном зацеплении с концевым эффектором 1300. Например, хирургический инструмент 1010 может включать в себя закрывающий узел, который может переводить концевой эффектор 1300 между открытой конфигурацией и закрытой конфигурацией, узел шарнира, который может шарнирно поворачивать концевой эффектор 1300 относительно стержня 1210, и/или пусковой узел, который может скреплять и/или разрезать ткань, захваченную концевым эффектором 1300. В дополнение к этому хирургический инструмент 1010 может включать в себя кожух, например, такой как рукоятка 1042, которая может соединяться со стержнем 1210 с возможностью отделения и может включать в себя дополняющие системы закрытия, шарнира и/или пускового привода, которые могут быть функционально соединены с узлами закрытия, шарнира и/или пуска, соответственно, стержня 1210, когда рукоятка 1042 соединена со стержнем 1210.
В процессе применения оператору хирургического инструмента 1010 может потребоваться выполнить сброс хирургического инструмента 1010 и возврат одного или более узлов хирургического инструмента 1010 в базовое положение. Например, оператор может ввести концевой эффектор 1300 в операционное поле внутри организма пациента через отверстие для доступа, а затем может шарнирно повернуть и/или закрыть концевой эффектор 1300, чтобы захватить ткань внутрь полости. Затем оператор может принять решение об отмене некоторых или всех из предыдущих действий и может принять решение об удалении хирургического инструмента 1010 из полости. Хирургический инструмент 1010 может включать в себя одну или более систем, выполненных с возможностью содействовать надежному возврату одного или более вышеописанных узлов в исходное состояние с минимальным участием оператора, посредством чего позволяя оператору извлечь хирургический инструмент из полости.
Как показано на ФИГ. 150, хирургический инструмент 1010 может включать в себя систему управления шарнирным сочленением 3000. Оператор-хирург может использовать систему управления шарнирным сочленением 3000 для шарнирного поворота концевого эффектора 1300 относительно стержня 1210 между положением исходного состояния шарнира и шарнирно повернутым положением. В дополнение к этому оператор-хирург может использовать систему управления шарнирным сочленением 3000 для сброса или возврата шарнирно повернутого концевого эффектора 1300 в положение исходного состояния шарнира. Система управления шарнирным сочленением 3000 может быть расположена по меньшей мере частично в рукоятке 1042. В дополнение к этому, как показано на примере принципиальной блок-схемы, показанной на ФИГ. 151, система управления шарнирным сочленением 3000 может содержать контроллер, такой как, например, контроллер 3002, который может быть выполнен с возможностью принимать входной сигнал и в ответ активировать двигатель, такой как, например, двигатель 1102, что приводит к шарнирному повороту концевого эффектора 1300 в соответствии с таким входным сигналом. Примеры подходящих контроллеров описаны в других местах настоящего документа и включают в себя, без ограничений, микроконтроллер 7004 (см. ФИГ. 185).
В дополнение к указанному выше, концевой эффектор 1300 может быть расположен в достаточном совмещении со стержнем 1210 в положении исходного состояния шарнира, который также в настоящем документе называется шарнирно неповернутым положением, так что концевой эффектор 1300 и по меньшей мере часть стержня 1210 могут быть введены в или оттянуты из внутренней полости организма пациента через отверстие для доступа, такое как, например, троакар, расположенный в стенке внутренней полости, без повреждения осевого порта. В некоторых вариантах осуществления концевой эффектор 1300 может быть совмещен или по меньшей мере по существу совмещен с продольной осью LL, проходящей через стержень 1210, когда концевой эффектор 1300 находится в положении исходного состояния шарнира, как показано на ФИГ. 150. По меньшей мере в одном варианте осуществления положение исходного состояния шарнира может находиться, например, под любым углом до 5° включительно с продольной осью на любой стороне продольной оси. В другом варианте осуществления положение исходного состояния шарнира может находиться, например, под любым углом до 3° включительно с продольной осью на любой стороне продольной оси. В еще одном варианте осуществления положение исходного состояния шарнира может находиться, например, под любым углом до 7° включительно с продольной осью на любой стороне продольной оси.
Система управления шарнирным сочленением 3000 может быть выполнена с возможностью шарнирного поворота концевого эффектора 1300 относительно стержня 1210 в плоскости, пересекающей продольную ось в первом направлении, таком как, например, направление по часовой стрелке, и/или во втором направлении, таком как, например, направление против часовой стрелки. По меньшей мере в одном примере система управления шарнирным сочленением 3000 может быть выполнена с возможностью шарнирного поворота концевого эффектора 1300 в направлении по часовой стрелке из положения исходного состояния шарнира в шарнирно повернутое положение под углом 10° к продольной оси, например, справа от продольной оси. В другом примере система управления шарнирным сочленением 3000 может быть выполнена с возможностью шарнирного поворота концевого эффектора 1300 в направлении против часовой стрелки из шарнирно повернутого положения под углом 10° к продольной оси в положение исходного состояния шарнира. В еще одном примере система управления шарнирным сочленением 3000 может быть выполнена с возможностью шарнирного поворота концевого эффектора 1300 относительно стержня 1210 в направлении против часовой стрелки из положения исходного состояния шарнира в шарнирно повернутое положение под углом 10° к продольной оси слева от продольной оси. Читателю будет понятно, что концевой эффектор может быть шарнирно повернут под разными углами в направлении по часовой стрелке и/или в направлении против часовой стрелки в ответ на команды оператора.
Как показано на ФИГ. 150, рукоятка 1042 хирургического инструмента 1010 может содержать стыковочный элемент 3001, который может включать в себя множество входов, которые могут быть использованы оператором частично для шарнирного поворота концевого эффектора 1300 относительно стержня 1210, как описано выше. В некоторых вариантах осуществления стыковочный элемент 3001 может содержать множество переключателей, которые могут быть соединены с контроллером 3002, например, с помощью электрических цепей. В варианте осуществления, показанном на ФИГ. 151, стыковочный элемент 3001 содержит три переключателя 3004A-C, причем каждый из переключателей 3004A-C соединен с контроллером 3002 с помощью одной из трех электрических цепей 3006A-C соответственно. Читателю будет понятно, что со стыковочным элементом 3001 могут использоваться другие комбинации переключателей и цепей.
В дополнение к указанному выше контроллер 3002 может содержать процессор 3008 и/или одно или более устройств памяти 3010. Путем исполнения кодовой инструкции, которая хранится в памяти 3010, процессор 3008 может управлять различными компонентами хирургического инструмента 1, такими как двигатель 1102 и/или пользовательский дисплей. Контроллер 3002 может быть реализован с применением интегрированных и/или отдельных аппаратных элементов, программных элементов и/или их комбинации. Примеры интегрированных аппаратных элементов могут включать в себя процессоры, микропроцессоры, микроконтроллеры, интегральные схемы, специализированные интегральные схемы (СИС), программируемые логические устройства (ПЛУ), процессоры для обработки цифровых сигналов (DSP), программируемые пользователем вентильные матрицы (ППВМ), логические вентили, регистры, полупроводниковые устройства, кристаллы, микрокристаллы, наборы кристаллов, микроконтроллер, система на кристалле (SoC) и/или система в пакете (SIP). Примеры отдельных аппаратных элементов могут включать в себя схемы и/или элементы схемы (например, логические вентили, полевые транзисторы, биполярные транзисторы, резисторы, конденсаторы, индукционные катушки, реле и т.п.). В других вариантах осуществления контроллер 3002 может включать в себя гибридную схему, содержащую, например, отдельные или интегрированные элементы схемы или компоненты на одной или более подложках.
Как также показано на ФИГ. 151, хирургический инструмент 1010 может включать в себя контроллер двигателя 3005, находящийся в функциональной связи с контроллером 3002. Контроллер двигателя 3005 может быть выполнен с возможностью управлять направлением поворота двигателя 1102. Например, двигатель 1102 может получать питание от батареи, например, такой как батарея 1104, а контроллер двигателя 3002 может быть выполнен с возможностью определять полярность напряжения, приложенного к двигателю 1102 батареей 1104, и в свою очередь направление поворота двигателя 1102 на основе входного сигнала от контроллера 3002. Например, двигатель 1102 может изменять направление его поворота на обратное с направления по часовой стрелке на направление против часовой стрелки, когда полярность напряжения, приложенного к двигателю 1102 батареей 1104, изменяется на обратную с помощью контроллера двигателя 3005 на основе входного сигнала от контроллера 3002. Примеры подходящих контроллеров двигателя описаны в других местах настоящего документа и включают в себя, без ограничений, шкив 7010 (ФИГ. 185).
В дополнение к этому, как более подробно описано в других местах настоящего документа, двигатель 1102 может быть функционально соединен с приводом шарнира, таким как, например, проксимальный привод шарнира 10030 (ФИГ. 37). В процессе применения двигатель 1102 может приводить в действие проксимальный привод шарнира 10030 дистально или проксимально, в зависимости от того, в каком направлении поворачивается двигатель 1102. Более того, проксимальный привод шарнира 10030 может быть функционально соединен с концевым эффектором 1300, например, так, что аксиальное поступательное перемещение проксимального привода шарнира 10030 проксимально может заставлять концевой эффектор 1300 шарнирно поворачиваться, например, в направлении против часовой стрелки, и/или аксиальное поступательное перемещение проксимального привода шарнира 10030 дистально может заставлять концевой эффектор 1300 шарнирно поворачиваться, например, в направлении по часовой стрелке.
В дополнение к указанному выше, как также показано на ФИГ. 151, стыковочный элемент 3001 может быть выполнен так, что переключатель 3004A может быть предназначен для шарнирного поворота концевого эффектора 1300 в направлении по часовой стрелке, а переключатель 3004B может быть предназначен для шарнирного поворота концевого эффектора 1300 в направлении против часовой стрелки. Например, оператор может шарнирно повернуть концевой эффектор 1300 в направлении по часовой стрелке, замкнув переключатель 3004A, что может подавать на контроллер 3002 сигнал, чтобы заставить двигатель 1102 поворачиваться в направлении по часовой стрелке, посредством чего в итоге приводя к продвижению проксимального привода шарнира 10030 дистально и приводя к шарнирному повороту концевого эффектора 1300 в направлении по часовой стрелке. В другом примере оператор может шарнирно повернуть концевой эффектор 1300 в направлении против часовой стрелки, замкнув переключатель 3004B, что может подавать на контроллер 3002 сигнал, чтобы заставить двигатель 1102 поворачиваться в направлении против часовой стрелки, и, например, оттянув проксимальный привод шарнира 10030 проксимально для шарнирного поворота концевого эффектора 1300 в направлении против часовой стрелки.
В дополнение к указанному выше переключатели 3004A-C могут содержать куполообразные переключатели без фиксации состояния размыкания, как показано на ФИГ. 154. Также могут быть использованы другие типы переключателей, такие как, например, емкостные переключатели. В варианте осуществления, показанном на ФИГ. 154, управление куполообразными переключателями 3004A и 3004B осуществляется с помощью тумблера 3012. Также предусмотрено, что другие средства управления переключателями 3004A и 3004B находятся в рамках объема настоящего описания. В нейтральном положении, показанном на ФИГ. 154, оба переключателя 3004A и 3004B смещаются в разомкнутое положение. Например, оператор может шарнирно повернуть концевой эффектор 1300 в направлении по часовой стрелке, наклонив тумблер вперед, посредством этого нажимая на куполообразный переключатель 3004A, как показано на ФИГ. 155. В результате этого цепь 3006A (ФИГ. 151) может замыкаться, подавая контроллеру 3002 сигнал для активации двигателя 1102, чтобы шарнирно поворачивать концевой эффектор 1300 в направлении по часовой стрелке, как описано выше. Двигатель 1102 может продолжать шарнирно поворачивать концевой эффектор 1300 до тех пор, пока оператор не высвободит тумблер 3012, посредством этого позволяя куполообразному переключателю 3004A возвращаться в разомкнутое положение, а тумблеру 3012 - в нейтральное положение. В некоторых обстоятельствах контроллер 3002 может быть способен определять, когда концевой эффектор 1300 достиг максимальной заданной степени шарнирного поворота, прекращая в этот момент подачу питания на двигатель 1102, независимо от того, нажат ли куполообразный переключатель 3004A. В некотором отношении контроллер 3002 может быть выполнен с возможностью изменения приоритета ввода оператора и остановки двигателя 1102 при достижении максимальной безопасной степени шарнирного поворота. Альтернативно оператор может шарнирно поворачивать концевой эффектор 1300 в направлении против часовой стрелки, например, отклонив тумблер назад, посредством этого нажав на куполообразный переключатель 3004B. В результате этого цепь 3006B может замыкаться, подавая контроллеру 3002 сигнал для активации двигателя 1102, чтобы шарнирно повернуть концевой эффектор 1300 в направлении против часовой стрелки, как описано выше. Двигатель 1102 может продолжать шарнирно поворачивать концевой эффектор 1300 до тех пор, пока оператор не высвободит тумблер 3012, посредством этого позволяя куполообразному переключателю 3004B возвращаться в разомкнутое положение, а тумблеру 3012 - в нейтральное положение. В некоторых обстоятельствах контролер 3002 может быть способен определять, когда концевой эффектор 1300 достиг максимальной заданной степени шарнирного поворота, прекращая в этот момент подачу питания на двигатель 1102, независимо от того, нажат ли куполообразный переключатель 3004B. В некотором отношении контроллер 3002 может быть выполнен с возможностью изменения приоритета ввода оператора и остановки двигателя 1102 при достижении максимальной безопасной степени шарнирного поворота.
В некоторых вариантах осуществления система управления шарнирным сочленением 3000 может включать в себя виртуальный стопор, который может предупреждать оператора о том, что концевой эффектор достиг положения исходного состояния шарнира. Например, оператор может отклонить тумблер 3012, чтобы шарнирно повернуть концевой эффектор 1300 из шарнирно повернутого положения в положение исходного состояния шарнира. При достижении положения исходного состояния шарнира контроллер 3002 может останавливать шарнирный поворот концевого эффектора 1300. Для продолжения движения после достижения положения исходного состояния шарнира оператор может высвобождать тумблер 3012, а затем снова отклонять его, чтобы повторно начать шарнирный поворот. Альтернативно также может применяться механический стопор для обеспечения гаптической обратной связи для оператора, которая показывает, что концевой эффектор достиг положения исходного состояния шарнира. Могут использоваться другие формы обратной связи, такая как, например, звуковая обратная связь.
В дополнение к указанному выше, система управления шарнирным сочленением 3000 может включать в себя вход сброса, который может сбрасывать или возвращать концевой эффектор 1300 в положение исходного состояния шарнира, если концевой эффектор 1300 находится в шарнирно повернутом положении. Например, как показано на ФИГ. 160, получив входной сигнал сброса, контроллер 3002 может определять шарнирное положение концевого эффектора 1300, и если концевой эффектор 1300 находится в положении исходного состояния шарнира, контроллер 3002 может не предпринимать действий. Однако если концевой эффектор 1300 находится в шарнирно повернутом положении, когда он получает входной сигнал сброса, контроллер может активировать двигатель 1102 для возврата концевого эффектора 1300 в положение исходного состояния шарнира. Как показано на ФИГ. 156, оператор может нажимать на тумблер 3012 вниз, чтобы замкнуть куполообразные переключатели 3004A и 3004B одновременно или по меньшей мере в течение короткого периода времени друг после друга, в результате чего на контроллер 3002 может быть подан входной сигнал сброса или возврата концевого эффектора 1300 в положение исходного состояния шарнира. Затем оператор может высвободить тумблер 3012, посредством этого позволяя тумблеру 3012 возвращаться в нейтральное положение, а переключателям 3004A и 3004B - в разомкнутые положения. Альтернативно стыковочный элемент 3001 системы управления шарнирным сочленением 3000 может включать в себя отдельный переключатель сброса, такой как, например, другой куполообразный переключатель, который оператор может замыкать независимо, передавая входной сигнал сброса на контроллер 3002.
Как показано на ФИГ. 157-159, в некоторых вариантах осуществления стыковочный элемент 3001 хирургического инструмента 1010 может включать в себя тумблер стыковочного элемента 3012A, включающий в себя контактный элемент 3013, который может быть выполнен с возможностью содействия перемещению тумблера 3012A в его нейтральное положение, как показано на ФИГ. 157. Контактный элемент 3013 может содержать дугообразную поверхность 3017, которая может быть смещена к кожуху стыковочного элемента 3011 с помощью смещающего элемента и/или с помощью смещающих усилий, прилагаемых к нему куполообразными переключателями 3004A и 3004B. Контактный элемент 3013 может быть выполнен с возможностью качаться или вращаться, когда оператор отклоняет тумблер 3012A вперед, как показано на ФИГ. 158, или назад, чтобы шарнирно повернуть концевой эффектор 1300 в направлении по часовой стрелке или в направлении против часовой стрелки соответственно. При высвобождении тумблера 3012A дугообразная поверхность тумблера 3012A может быть повернута назад в его нейтральное положение к кожуху стыковочного элемента 3011 с помощью прилагаемых к нему смещающих усилий. В различных обстоятельствах контактный элемент 3013 может быть смещен от кожуха стыковочного элемента 3011, когда оператор нажимает на тумблер 3012A вниз, как показано на ФИГ. 159, чтобы нажать на куполообразные переключатели 3004A и 3004B одновременно или по меньшей мере в пределах короткого периода времени друг после друга, в результате чего на контроллер 3002 может передаваться входной сигнал сброса для сброса или возврата концевого эффектора 1300 в положение исходного состояния шарнира, как описано выше.
Как описано выше, контроллер 3002 может быть выполнен с возможностью определять шарнирное положение концевого эффектора 1300. Информация о шарнирном положении концевого эффектора 1300 может позволить контроллеру 3002 определить, необходимо ли активировать двигатель 1102 для возврата концевого эффектора 1300 в положение исходного состояния шарнира, и если это необходимо, определить направление поворачивания и объем поворачивания двигателя 1102, необходимые для возврата концевого эффектора 1300 в положение исходного состояния шарнира. В некоторых вариантах осуществления контроллер 3002 может отслеживать шарнирный поворот концевого эффектора 1300 и сохранять шарнирное положение концевого эффектора 1300, например, в памяти 3010. Например, контроллер 3002 может отслеживать направление поворачивания, скорость поворачивания и время поворачивания двигателя 1102, когда двигатель 1102 применяется для шарнирного поворота концевого эффектора 1300. В некоторых обстоятельствах контроллер 3002 может быть выполнен с возможностью оценивать смещение пусковой системы, когда пусковая система применяется для приведения в действие системы шарнира. Более конкретно, когда привод шарнира соединен с пусковым приводом, контроллер 3002 может контролировать пусковой привод, чтобы определить смещение привода шарнира. На основании этих параметров процессор 3008 может рассчитывать шарнирное положение концевого эффектора 1300 и сохранять информацию о смещенном положении привода шарнира, например, в памяти 3010. Читателю будет понятно, что процессор 3010 может использовать другие параметры для отслеживания и другие алгоритмы для расчета шарнирного положения концевого эффектора 1300, все из которых предусмотрены в настоящем описании. Сохраненное шарнирное положение концевого эффектора 1300 может постоянно обновляться по мере шарнирного поворота концевого эффектора 1300. Альтернативно сохраненное шарнирное положение может обновляться в отдельные точки, например, когда оператор высвобождает куполообразный переключатель 3004A или переключать 3004B после нажатия на них для шарнирного поворота концевого эффектора 1300.
В любом случае, получив входной сигнал сброса, процессор 3008 может получать доступ к памяти 3010 для восстановления последнего сохраненного шарнирного положения концевого эффектора 1300. Если последнее сохраненное шарнирное положение не является положением исходного состояния шарнира, процессор 3008 может рассчитывать направление и время поворачивания двигателя 1102, необходимые для возврата концевого эффектора 1300 в положение исходного состояния шарнира на основе последнего сохраненного шарнирного положения. В некоторых обстоятельствах процессор 3008 может рассчитывать расстояние и направление, в котором необходимо сместить пусковой привод, чтобы разместить привод шарнира в его состояние исходного положения. В любом случае контроллер 3002 может активировать двигатель 1102 для соответствующего поворачивания для возврата концевого эффектора 1300 в положение исходного состояния шарнира. Более того, процессор 3008 также может обновлять сохраненное шарнирное положение, чтобы указать положение исходного состояния шарнира. Однако если последнее сохраненное шарнирное положение представляет собой положение исходного состояния шарнира, контролер 3002 может не предпринимать действий. В некоторых обстоятельствах контроллер 3002 может предупреждать пользователя с помощью некоторой формы обратной связи о том, что концевой эффектор и система шарнира находятся в ее состоянии исходного положения. Например, контроллер 3002 может быть выполнен с возможностью активировать звуковой и/или световой сигнал для предупреждения оператора о том, что концевой эффектор 1300 находится в положении исходного состояния шарнира.
В некоторых вариантах осуществления хирургический инструмент 1010 может включать в себя датчик, выполненный с возможностью определять шарнирное положение концевого эффектора 1300 и передавать информацию о нем на контроллер 3002. Аналогично указанному выше определенное шарнирное положение концевого эффектора 1300, например, может быть сохранено в памяти 3010 и может постоянно обновляться по мере шарнирного поворота концевого эффектора 1300 или может обновляться, когда оператор высвобождает куполообразный переключатель 3004A, или после нажатия на него для шарнирного поворота концевого эффектора 1300.
В некоторых вариантах осуществления может быть желательно включить предупреждающий этап до сброса или возврата концевого эффектора 1300 в положение исходного состояния шарнира, чтобы дать оператору шанс исправить ошибочную активацию переключателя сброса. Например, контроллер 3002 может быть выполнен с возможностью реагировать на первую передачу входного сигнала сброса на контроллер 3002 путем активации светового и/или звукового сигнала, предупреждающего оператора о том, что тумблер 3012 был нажат. В дополнение к этому контроллер 3002 также может быть выполнен с возможностью реагировать на вторую передачу входного сигнала сброса на контроллер 3002 в пределах заданного периода времени после первой передачи путем активации двигателя 1102 для возврата концевого эффектора 1300 в положение исходного состояния шарнира. Иными словами, первое нажатие на тумблер 3012 вниз может приводить к предупреждению оператора, а второе нажатие на тумблер 3012 вниз в пределах заданного периода времени после первого нажатия вниз может приводить к тому, что контроллер 3002 активирует двигатель 1102 для возврата концевого эффектора 1300 в положение исходного состояния шарнира.
В дополнение к указанному выше стыковочный элемент 3001 может включать в себя дисплей, который может применяться контроллером 3002 для представления предупреждающего сообщения для оператора в ответ на первое нажатие на тумблер 3012 вниз. Например, в ответ на первое нажатие на тумблер 3012 вниз контроллер 3002 может с помощью дисплея предложить оператору подтвердить, что оператор желает возвратить концевой эффектор 1300 в положение исходного состояния шарнира. Если оператор реагирует путем повторного нажатия на тумблер 3012 в пределах заданного периода времени, контроллер 3012 может среагировать путем активации двигателя 1102 для возврата концевого эффектора 1300 в положение исходного состояния шарнира.
Как более подробно описано в других частях документа, концевой эффектор 1300 хирургического инструмента 1010 может включать в себя первую браншу, содержащую упор, например, такой как упор 1310, и вторую браншу, содержащую канал, выполненный с возможностью принимать кассету со скобами, например, такую как кассета со скобами 1304, которая может включать в себя множество скоб. В дополнение к этому концевой эффектор 1300 может быть переведен между открытой конфигурацией и закрытой конфигурацией. Более того, хирургический инструмент 1010 может включать в себя закрывающую блокировку, а рукоятка 1042 может включать в себя освобождающий элемент закрывающей блокировки, такой как, например, освобождающий элемент 1072, на который оператор может нажать, чтобы высвободить закрывающую блокировку, посредством этого возвращая концевой эффектор 1300 в открытую конфигурацию. В дополнение к этому контроллер 3002 может быть соединен с датчиком 3014, выполненным с возможностью обнаруживать высвобождение закрывающей блокировки с помощью освобождающего элемента 1272. Более того, хирургический инструмент 1010 может включать в себя пусковой привод, например, такой как пусковой привод 1110, который может быть функционально соединен с пусковым элементом, например, таким как пусковой элемент 10060. Контроллер 3002 может быть соединен с датчиком 3015, выполненным с возможностью обнаруживать положение пускового привода 1110. Пусковой привод 1110 может быть аксиально перемещен для продвижения пускового элемента 10060 из положения исходного состояния пуска в активированное положение для размещения скоб из кассеты со скобами 1304 и/или для разрезания ткани, захваченной между упором 1310 и кассетой со скобами 1304, когда концевой эффектор 1300 находится в закрытой конфигурации.
Также, как более подробно описано в других частях документа, проксимальный привод шарнира 10030 хирургического инструмента 1010 может избирательно соединяться с пусковым приводом 1110 так, что когда пусковой привод 1110 подталкивается двигателем 1102, проксимальный привод шарнира 10030 может приводиться в действие пусковым приводом 1110, а проксимальный привод шарнира 10030 в свою очередь может шарнирно поворачивать концевой эффектор 1300 относительно стержня 1210, как описано выше. Более того, пусковой привод 1110 может отсоединяться от проксимального привода шарнира 10030, когда концевой эффектор 1300 находится в закрытой конфигурации. Такая конфигурация позволяет двигателю 1102 подталкивать пусковой привод 1110 для перемещения пускового элемента 10060 между положением исходного состояния пуска и активированным положением независимо от проксимального привода шарнира 10030.
В дополнение к указанному выше, как более подробно описано в других местах документа, хирургический инструмент 1010 может включать в себя систему сцепления 10070 (см. ФИГ. 37), которая может зацепляться, когда концевой эффектор 1300 переводят из открытой конфигурации в закрытую конфигурацию, и расцепляться, когда концевой эффектор 1300 переводят из закрытой конфигурации в открытую конфигурацию. При зацеплении система сцепления 10070 может функционально соединять пусковой привод 1110 с проксимальным приводным элементом 10030, а когда элемент сцепления расцеплен, пусковой привод 1110 может быть отсоединен от проксимального привода шарнира. Так как пусковой привод 1110 может быть отсоединен и перемещен независимо от проксимального привода шарнира 10030, контроллер 3002 может быть выполнен с возможностью направлять пусковой привод 1110, чтобы разместить проксимальный привод шарнира 10030 и еще раз повторно соединить проксимальный привод шарнира 10030 с пусковым приводом 1110. Контроллер 3002 может отслеживать направление поворачивания, скорость поворачивания и время поворачивания двигателя 1102, когда пусковой привод 1110 соединен с проксимальным приводом шарнира 10030 для определения и сохранения местонахождения проксимального привода шарнира 10030, например, в памяти 3010. Контроллер 3002, как описано в других местах настоящего документа, может контролировать смещение пусковой системы, применяемой для приведения в действие системы шарнира. Для определения местонахождения проксимального привода шарнира 10030 могут быть использованы другие параметры и алгоритмы. В некоторых вариантах осуществления пусковой привод 1110 может включать в себя датчик, выполненный с возможностью обнаруживать, когда пусковой привод 1110 соединен с проксимальным приводом шарнира 10030, и передавать информацию на контроллер 3002 для подтверждения соединительного зацепления между пусковым приводом 1110 и проксимальным приводом шарнира 10030. В некоторых вариантах осуществления, когда контроллер 3002 не выполнен с возможностью сохранять и получать доступ к информации о шарнирном положении концевого эффектора 1300, контроллер может активировать двигатель 1102, чтобы подталкивать пусковой привод 1110 перемещаться вдоль его полного диапазона движений до тех пор, как пусковой привод 1110 не войдет в соединительную конфигурацию с проксимальным приводом шарнира 10030.
В дополнение к указанному выше в некоторых вариантах осуществления положение исходного состояния пуска пускового элемента 10060 может быть размещено в проксимальной части концевого эффектора 1300. Альтернативно положение исходного состояния пуска пускового элемента 10060 может быть размещено в дистальной части концевого эффектора 1300. В некоторых вариантах осуществления положение исходного состояния пуска может быть определено в положении, в котором пусковой элемент 10060 в достаточной степени оттянут относительно концевого эффектора 1300 так, что концевой эффектор 1300 может быть свободно перемещен между открытой конфигурацией и закрытой конфигурацией. В других обстоятельствах положение исходного состояния пуска пускового элемента 10060 может быть определено как положение пускового элемента, в котором система привода шарнира и концевой эффектор расположены в состоянии исходного положения шарнирного поворота.
Как также показано на ФИГ. 151, стыковочный элемент 3001 хирургического инструмента 1010 может включать в себя вход исходного состояния. Оператор может использовать вход исходного состояния для передачи входного сигнала исходного состояния на контроллер 3002 для возврата хирургического инструмента 1010 в исходное состояние, что может включать в себя возврат концевого эффектора 1300 в положение исходного состояния шарнира и/или пускового элемента 10060 в положение исходного состояния пуска. Как показано на ФИГ. 154, вход исходного состояния может включать в себя переключатель, такой как, например, переключатель 3004C, который может быть соединен с контроллером 3002 с помощью электрической цепи 3006C. Как показано на ФИГ. 152 и 153, вход исходного состояния может включать в себя колпачок или крышку, такую как, например, крышка 3014, на которую оператор может нажимать, чтобы замкнуть переключатель 3004C и передать входной сигнал исходного состояния через цепь 3006C на контроллер 3002.
Как также показано на ФИГ. 161, контроллер 3002, получив входной сигнал исходного состояния, может проверять положение пускового привода 1110 с помощью датчика 3015 и может проверять память 3010 на наличие последнего обновленного шарнирного положения. Если контроллер 3002 определяет, что концевой эффектор 1300 находится в положении исходного состояния шарнира, а пусковой привод 1110 расположен так, что он соединен с проксимальным приводом шарнира 10030, то контроллер 3002 может не предпринимать действий. Альтернативно контроллер 3002 может обеспечивать обратную связь для оператора о том, что хирургический инструмент 1010 находится в исходном состоянии. Например, контроллер 3002 может быть выполнен с возможностью активировать звуковой и/или световой сигнал или передавать сообщение через дисплей для предупреждения оператора о том, что хирургический инструмент 1010 находится в исходном состоянии. Однако если контроллер 3002 определяет, что концевой эффектор 1300 не находится в положении исходного состояния шарнира и, что пусковой привод 1110 расположен так, что он соединен с проксимальным приводом шарнира 10030, контроллер 3002 может активировать двигатель 1102 для подталкивания пускового привода 1110 с целью перемещения проксимального привода шарнира 10030, который в свою очередь может шарнирно повернуть концевой эффектор 1300 относительно стержня 1210 назад в положение исходного состояния шарнира. Альтернативно если контроллер 3002 определяет, что концевой эффектор 1300 не находится в положении исходного состояния шарнира, но пусковой привод 1110 не расположен так, что он соединен с проксимальным приводом шарнира 10030, контроллер 3002 может активировать двигатель 1102 для перемещения пускового привода 1110 в положение, в котором пусковой привод 1110 соединен с приводом шарнира 10030. В процессе двигатель 1102 может оттягивать пусковой элемент 10060 в положение исходного состояния пуска.
В некоторых вариантах осуществления, как показано на ФИГ. 162, контроллер 3002, получив входной сигнал исходного состояния, может проверить, находится ли концевой эффектор 1300 в открытой конфигурации, с помощью датчика 3016. Также могут использоваться другие средства определения того, находится ли концевой эффектор 1300 в открытой конфигурации. Если контроллер 3002 определяет, что концевой эффектор 1300 находится в открытой конфигурации, контроллер 3002 может продолжать, как описано выше. Однако если контроллер 3002, получив входной сигнал исходного состояния, определяет, что концевой эффектор 1300 находится в закрытой конфигурации, контроллер 3002 может предложить оператору подтвердить, что оператор желает возвратить хирургический инструмент 1010 в исходное состояние. Данный этап может представлять собой этап предосторожности, чтобы предотвратить случайное открытие оператором концевого эффектора 1300, например, во время хирургической процедуры. В некоторых вариантах осуществления контроллер 3002 может, отобразив сообщение, например, на дисплее, соединенном с контроллером 3002, запросить у оператора о необходимости возврата концевого эффектора 1300 в открытую конфигурацию путем нажатия на освобождающий элемент 1072. Если оператор не высвободит концевой эффектор 1300 в открытую конфигурацию, контроллер 3002 может не предпринимать действий. В других вариантах осуществления контроллер 3002 может предупредить оператора путем отображения сообщения об ошибке или активации звука или света. Однако если оператор высвобождает концевой эффектор 1300 в открытую конфигурацию, контроллер 3002 может выполнить сброс хирургического инструмента, как описано выше.
Как показано на ФИГ. 163, пусковой элемент 10060 может содержать отдельный вход сброса пуска, который может включать в себя переключатель и электрическую цепь, соединяющую переключатель с контроллером 3002, причем переключатель может быть выполнен с возможностью замыкать цепь и передавать входной сигнал сброса пуска на контроллер 3002. Контроллер 3002, получив входной сигнал сброса пуска, может проверить, находится ли пусковой элемент 10060 в положении исходного состояния пуска. Как более подробно описано в других частях документа, пусковой элемент 10060 может быть функционально соединен с пусковым приводом 1110, который может содержать датчик, например, такой как датчик 3015 (см. ФИГ. 151), который может передавать информацию о местонахождении пускового привода 1110 на контроллер 3002. Соответственно, контроллер 3002 может определять местонахождение пускового элемента 10060, контролируя местонахождение пускового привода 1110. В любом случае если контроллер 3002 определяет, что пусковой элемент 10060 находится в положении исходного состояния пуска, контроллер может не предпринимать действий или может предупреждать оператора о том, что пусковой элемент 10060 уже находится в положении исходного состояния пуска, активируя звук и/или свет. С другой стороны, если контроллер 3002 определяет, что пусковой элемент 10060 не находится в положении исходного состояния пуска, контроллер 3002 может активировать двигатель 1102, подталкивая пусковой привод 1110, чтобы возвратить пусковой элемент 10060 в положение исходного состояния пуска.
Как более подробно описано в других местах документа, хирургический инструмент 1010 может включать в себя несколько узлов, которые проходят по меньшей мере частично через стержень 1210 и могут находиться в функциональном зацеплении с концевым эффектором 1300. Например, хирургический инструмент 1010 может включать в себя закрывающий узел, который может переводить концевой эффектор 1300 между открытой конфигурацией и закрытой конфигурацией, узел шарнира, который может шарнирно поворачивать концевой эффектор 1300 относительно стержня 1210, и/или пусковой узел, который может скреплять и/или разрезать ткань, захваченную концевым эффектором 1300. В дополнение к этому хирургический инструмент 1010 может включать в себя кожух, например, такой как рукоятка 1042, которая может быть выполнена с возможностью разъемно соединяться со стержнем 1210 и может включать в себя дополняющие системы закрытия, шарнира и/или пускового привода, которые могут быть функционально соединены с узлами закрытия, шарнира и/или пуска, соответственно, стержня 1210, когда рукоятка 1042 соединена со стержнем 1210.
В процессе применения описанные выше узлы и их соответствующие приводные системы могут быть функционально соединены. Попытка отделить рукоятку 1042 от стержня 1210 во время работы хирургического инструмента 1010 может рассекать соединения между узлами и их соответствующими приводными системами таким способом, чтобы один или более из этих узлов и их соответствующие приводные системы не будут совмещены. С другой стороны, если у пользователя не получится отделить рукоятку 1042 от стержня 1210 во время работы, это может, не больше, не меньше, вызвать замешательство, досаду и/или ошибочное предположение о том, что хирургический инструмент не работает надлежащим образом.
Хирургический инструмент 1010 может включать в себя систему безопасного высвобождения 3080, которая может быть выполнена с возможностью возврата один или более узлов и/или соответствующих приводных систем хирургического инструмента 1010 в исходное состояние, посредством чего позволяя оператору безопасно отделять рукоятку 1042 от стержня 1210. При использовании в настоящем документе термин «исходное состояние» может означать базовое состояние, в котором один или более узлов и/или соответствующих приводных систем хирургического инструмента 1010 могут находиться или могут быть возвращены в их базовое положение, такое как, например, их положение до соединения рукоятки 1042 со стержнем 1210.
Как показано на ФИГ. 150, система безопасного высвобождения 3080 хирургического инструмента 1010 может включать в себя блокирующий элемент, такой как, например, блокирующий элемент 3082, который может быть перемещен между заблокированной конфигурацией и незаблокированной конфигурацией. Как показано на ФИГ. 164 и как более подробно описано в других частях документа, стержень 1210 может быть совмещен и соединен с рукояткой 1042 хирургического инструмента 1010. В дополнение к этому блокирующий элемент 3082 может быть перемещен из незаблокированной конфигурации в заблокированную конфигурацию для блокировки рукоятки в соединительном зацеплении со стержнем 1210. Блокирующий элемент 3082 может быть расположен в проксимальной части стержня 1210, как показано на ФИГ. 166, и может включать в себя элемент защелки 3083, который может быть продвинут в приемную прорезь 3085, расположенную в рукоятке 1042, когда блокирующий элемент 3082 перемещен в заблокированную конфигурацию, а рукоятка 1042 соединена со стержнем 1210. В дополнение к этому элемент защелки 3083 может быть оттянут из приемной прорези 3085, когда блокирующий элемент 3082 перемещен в незаблокированную конфигурацию, посредством чего позволяя отделять рукоятку 1042 от стержня 1210, как показано на ФИГ. 167.
Как показано на ФИГ. 151, система безопасного высвобождения 3080 дополнительно может включать в себя переключатель замка 3084, который может быть соединен с контроллером 3002 с помощью электрической цепью 3086, которая может быть выполнена с возможностью передачи входного сигнала исходного состояния на контроллер 3002. В дополнение к этому переключатель замка 3084 может быть функционально соединен с блокирующим элементом 3082. Например, переключатель 3086 можно переместить, чтобы замкнуть цепь 3086, когда блокирующий элемент перемещен в незаблокированную конфигурацию, как показано на ФИГ. 167, и можно переместить, чтобы разомкнуть цепь 3086, когда блокирующий элемент 3082 перемещен в заблокированную конфигурацию, как показано на ФИГ. 166. В данном примере контроллер 3002 может быть выполнен с возможностью распознавать замыкание цепи 3086 как передачи входного сигнала исходного состояния. Альтернативно в другом примере переключатель 3086 можно перемещать, чтобы разомкнуть цепь 3086, когда блокирующий элемент перемещен в незаблокированную конфигурацию, и можно перемещать, чтобы замкнуть цепь 3086, когда блокирующий элемент 3082 перемещен в заблокированную конфигурацию. В данном примере контроллер 3002 может быть выполнен с возможностью распознавать размыкание цепи 3086 как передачи входного сигнала исходного состояния.
Как также показано на ФИГ. 166 и ФИГ. 167, блокирующий элемент 3082 может включать в себя первую поверхность 3090 и вторую поверхность 3092, которые могут быть разделены уклоном 3094, причем блокирующий элемент 3082 может быть расположен относительно переключателя 3084 так, что первая поверхность 3090 и вторая 3092 могут перемещаться с возможностью скольжения относительно переключателя 3084, когда рукоятка 1042 соединяется со стержнем 1210. Более того, как показано на ФИГ. 166, первая поверхность 3090 может проходить в первой плоскости, а вторая поверхность 3092 может проходить во второй плоскости, причем переключатель 3084 может быть ближе к первой плоскости, чем ко второй плоскости. Более того, как показано на ФИГ. 166, переключатель 3084 может нажиматься первой поверхностью 3090, когда блокирующий элемент 3082 находится в заблокированной конфигурации, а элемент защелки 3083 принимается внутрь приемной прорези 3085, посредством чего замыкая цепь 3086 (ФИГ. 151) и передавая входной сигнал исходного состояния на контроллер 3002. Однако по мере перемещения блокирующего элемента 3082 в незаблокированную конфигурацию и оттягивания элемента защелки 3083 из приемной прорези 3085 переключатель 3084 может скользить вдоль уклона 3094, чтобы быть обращенным ко второй поверхности 3092, которая может обеспечивать переключателю без фиксации положения 3084 достаточно места для возврата в разомкнутое положение, как показано на ФИГ. 166.
В некоторых вариантах осуществления, как показано на ФИГ. 151 и 165, первый конец 3084a переключателя 3084 может быть расположен в рукоятке 1042, например, в ее дистальной части, а второй конец 3084b переключателя 3084 может быть расположен в стержне 1210, например, в его проксимальной части, и они могут быть функционально соединены блокирующим элементом 3082. В этих вариантах осуществления переключатель 3084 не может замыкать цепь 3086 до тех пор, пока рукоятка 1042 не будет соединена со стержнем 1210, позволяя блокирующему элементу 3082 приводить второй конец 3084b переключателя 3084 в контакт с первым концом 3084a, посредством чего замыкая цепь 3086 и передавая входной сигнал исходного состояния на контроллер 3002. В других вариантах осуществления блокирующий элемент 3082, первый конец 3084a и второй конец 3084b переключателя 3084 могут быть расположены в рукоятке 1042, позволяя замыкать цепь 3086 и передавать входной сигнал исходного состояния на контроллер 3002 до соединения рукоятки 1042, например, для возврата системы пускового привода в ее базовое положение, чтобы обеспечить надлежащее совмещение с пусковым узлом при соединении стержня 1210 с рукояткой 1042.
Как более подробно описано в других частях документа, концевой эффектор 1300 хирургического инструмента 1010 может включать в себя первую браншу, содержащую упор, например, такой как упор 1310, и вторую браншу, содержащую канал, выполненный с возможностью принимать кассету со скобами, например, такую как кассета со скобами 1304, которая может включать в себя множество скоб. В дополнение к этому концевой эффектор 1300 может быть переведен между открытой конфигурацией и закрытой конфигурацией. Например, хирургический инструмент 1010 может включать в себя закрывающую блокировку для блокировки концевого эффектора 1300 в закрытой конфигурации, а рукоятка 1042 может включать в себя освобождающий элемент для закрывающей блокировки, например, такой как освобождающий элемент 1072, на который оператор может нажать, чтобы высвободить закрывающую блокировку, посредством чего возвращая концевой эффектор 1300 в открытую конфигурацию. В дополнение к этому контроллер 3002 может быть соединен с датчиком 3014, выполненным с возможностью обнаруживать высвобождение закрывающей блокировки с помощью освобождающего элемента 1072. Более того, хирургический инструмент 1010 может включать в себя пусковой привод, например, такой как пусковой привод 1110, который может быть функционально соединен с пусковым элементом, например, таким как пусковой элемент 10060. Контроллер 3002 может быть соединен с датчиком 3015, выполненным с возможностью обнаруживать положение пускового привода 1110. В дополнение к этому пусковой привод 1110 может продвигаться аксиально, как показано на ФИГ. 167A, чтобы продвигать пусковой элемент 10060 между неактивированным положением и активированным положением для размещения скоб из кассеты со скобами 1304 и/или разрезания ткани, захваченной между упором 1310 и кассетой со скобами 1304, когда концевой эффектор 1300 находится в закрытой конфигурации. Более того, пусковой привод может быть оттянут двигателем 1102 из продвинутого положения, например, положения, показанного на ФИГ. 167A, в базовое или отведенное положение, как показано на ФИГ. 167B, когда блокирующий элемент 3082 перемещен из закрытой конфигурации в открытую конфигурацию.
В дополнение к указанному выше, как более подробно описано в других частях документа, проксимальный привод шарнира 10030 хирургического инструмента 1010 может избирательно соединяться с пусковым приводом 1110 так, что когда пусковой привод 1110 подталкивается двигателем 5, проксимальный привод шарнира 10030 может приводиться в действие пусковым приводом 1110, а проксимальный привод шарнира 10030 в свою очередь может шарнирно поворачивать концевой эффектор 1300 относительно стержня 1210 между положением исходного состояния шарнира и шарнирным положением, как описано выше. Более того, пусковой привод 1110 может отсоединяться от проксимального привода шарнира 10030, например, когда концевой эффектор 1300 находится в закрытой конфигурации. Такая конфигурация позволяет двигателю 1102 подталкивать пусковой привод 1110 для перемещения пускового элемента 10060 между неактивированным положением и активированным положением независимо от проксимального привода шарнира 10030. Так как пусковой привод 1110 может быть отсоединен и перемещен независимо от проксимального привода шарнира 10030, контроллер 3002 может быть выполнен с возможностью направлять пусковой привод 1110, чтобы обнаруживать местоположение и повторно соединять проксимальный привод шарнира 10030. Некоторым образом контроллер 3002 может запоминать, где он оставил проксимальный привод шарнира 10030. Более конкретно контроллер 3002 может, во-первых, оценивать положение пускового привода 1110, когда проксимальный привод шарнира 10030 отсоединяется от пускового привода 1110 а, во-вторых, запоминать, где находится проксимальный привод шарнира 10030, когда контроллер 3002 получает инструкцию о повторном соединении пускового привода 1110 с проксимальным приводом шарнира 10030. В таких обстоятельствах контроллер 3002 может перемещать пусковой привод 1110 в положение, в котором узел сцепления 10070, например, может повторно соединять проксимальный привод шарнира 10030 с пусковым приводом 1110. Контроллер 3002 может отслеживать направление поворачивания, скорость поворачивания и время поворачивания двигателя 1102, когда пусковой привод 1110 соединен с проксимальным приводом шарнира 10030, для определения и сохранения местонахождения проксимального привода шарнира 10030, например, в памяти 3010. Для определения местонахождения проксимального привода шарнира 10030 могут быть использованы другие параметры и алгоритмы. В некоторых вариантах осуществления пусковой привод 1110 может включать в себя датчик, выполненный с возможностью обнаруживать, когда пусковой привод 1110 соединен с проксимальным приводом шарнира 10030, и передавать информацию на контроллер 3002 для подтверждения соединительного зацепления между пусковым приводом 1110 и проксимальным приводом шарнира 10030. В некоторых вариантах осуществления, когда контроллер 3002 не выполнен с возможностью сохранять и получать доступ к проксимальному приводу шарнира 10030, контроллер может активировать двигатель 1102, чтобы подтолкнуть пусковой привод 1110 для перемещения вдоль всего его диапазона движений до тех пор, пока пусковой привод 1110 не войдет в соединение с проксимальным приводом шарнира 10030.
Как показано на ФИГ. 151 и 165, система безопасного высвобождения 3080 может реагировать на попытку оператора отделить рукоятку 1042 от стержня 1210 путем выполнения сброса хирургического инструмента 1010 в исходное состояние, например, когда оператор перемещает блокирующий элемент 3082 из заблокированной конфигурации в незаблокированную конфигурацию. Как описано выше, переключатель 3084 может быть функционально соединен с блокирующим элементом 3082 так, что когда блокирующий элемент 3082 перемещен из заблокированной конфигурации в незаблокированную конфигурацию, переключатель 3084 может быть перемещен для размыкания цепи 3086, посредством чего передавая входной сигнал исходного состояния на контроллер 3002. Альтернативно перемещение переключателя 3084 из заблокированной конфигурации в незаблокированную конфигурацию может позволить замкнуть цепь 3086, посредством чего передавая входной сигнал исходного состояния на контроллер 3002.
Как также показано на ФИГ. 168, контроллер 3002, получив входной сигнал исходного состояния, может проверить положение пускового привода 1110 с помощью датчика 3015 и может проверить память 3010 на наличие последнего обновления шарнирного положения концевого эффектора и, соответственно, последнего положения проксимального привода шарнира 10030. Если контроллер 3002 определяет, что концевой эффектор 1300 находится в положении исходного состояния шарнира, а пусковой привод 1110 расположен так, что он соединяется с проксимальным приводом шарнира 10030, то контроллер 3002 может не предпринимать действий и пользователь может удалить узел стержня с рукоятки. Альтернативно контроллер 3002 может обеспечить для оператора обратную связь о том, что хирургический инструмент 1010 находится в исходном состоянии, и/или о том, что можно безопасно отделить рукоятку 1042 от стержня 1210. Например, контроллер 3002 может быть выполнен с возможностью активировать звуковой и/или световой сигнал и/или передать сообщение с помощью дисплея (не показан), соединенного с контроллером 3002, для предупреждения оператора о том, что хирургический инструмент 1010 находится в исходном состоянии, и/или о том, что можно безопасно отделить рукоятку 1042 от стержня 1210. Однако если контроллер 3002 определяет, что концевой эффектор 1300 не находится в положении исходного состояния шарнира и, что пусковой привод 1110 расположен так, что он соединен с проксимальным приводом шарнира 10030, контроллер 3002 может активировать двигатель 1102 для подталкивания пускового привода 1110 с целью перемещения проксимального привода шарнира 10030, который в свою очередь может шарнирно повернуть концевой эффектор 1300 относительно стержня 1210 назад в положение исходного состояния шарнира. Альтернативно если контроллер 3002 определяет, что концевой эффектор 1300 не находится в положении исходного состояния шарнира, но пусковой привод 1110 не расположен так, что он соединен с проксимальным приводом шарнира 10030, контроллер 3002 может активировать двигатель 1102, переместив пусковой привод 1110 в положение, в котором пусковой привод 1110 может быть выполнен с возможностью соединения с приводом шарнира 9. В процессе этого пусковой элемент 9 может оттягивать пусковой элемент 10060 в положение исходного состояния пуска. Как описано выше, контроллер 3002 необязательно может обеспечивать для оператора обратную связь о том, что хирургический инструмент 1010 находится в исходном состоянии, и о том, что можно безопасно отделять рукоятку 1042 от стержня 1210.
В некоторых вариантах осуществления, как показано на ФИГ. 169, контроллер 3002, получив входной сигнал исходного состояния, может проверить, находится ли концевой эффектор 1300 в открытой конфигурации, с помощью датчика 3016. Также можно использовать другие средства определения того, что концевой эффектор 1300 находится в открытой конфигурации. Если контроллер 3002 определяет, что концевой эффектор 1300 находится в открытой конфигурации, контроллер 3002 может продолжить с целью сброса хирургического инструмента 1010 в исходное состояние, как описано выше. Однако если контроллер 3002, получив входной сигнал исходного состояния, определяет, что концевой эффектор 1300 находится в закрытой конфигурации, контроллер 3002 может предложить оператору подтвердить, что оператор желает отделить рукоятку 1042 от стержня 1210. Данный этап может представлять собой этап предосторожности, предотвращающий сброс хирургического инструмента 1010, если оператор случайно переместил блокирующий элемент 3082, посредством чего ошибочно передавая входной сигнал исходного состояния на контроллер 3002, в то время как концевой эффектор 1300 находится в процессе применения и, например, зажимает ткань. В некоторых вариантах осуществления контроллер 3002 может, отобразив сообщение, например, на дисплее, соединенном с контроллером 3002, предложить возвратить концевой эффектор 1300 в открытую конфигурацию путем нажатия на освобождающий элемент 1072. В дополнение к механическому блокирующему элементу 3082 система безопасного высвобождения 3080 также может включать в себя электронную блокировку (не показана), управление которой может осуществляться контроллером 3002. Электронная блокировка может быть выполнена с возможностью предотвращать отделение оператором рукоятки 1042 от стержня 1210 до тех пор, пока оператор не нажмет на освобождающий элемент 1072. Если оператор не высвободит концевой эффектор 1300 в открытую конфигурацию, контроллер 3002 может не предпринимать действий. В других вариантах осуществления контроллер 3002 может предупредить оператора путем отображения сообщения об ошибке или активации звукового и/или светового сигнала. С другой стороны, если оператор высвобождает концевой эффектор 1300 в открытую конфигурацию, контроллер 3002 может выполнить сброс хирургического инструмента 1010, как описано выше. Если применяется электронная блокировка, после этого контроллер 3002 может высвободить электронную блокировку, чтобы позволить оператору отделить рукоятку 1042 от стержня 1210. Затем в дополнение к этому контроллер 3002 может предупредить оператора о том, что можно безопасно удалить рукоятку 1042 от стержня 1210, как описано выше.
В некоторых вариантах осуществления может быть желательно включить предупреждающий этап до сброса хирургического инструмента 1010 в исходное состояние в ответ на входной сигнал исходного состояния, чтобы дать оператору шанс исправить случайную разблокировку блокирующего элемента 3082. Например, контроллер 3002 может быть выполнен с возможностью реагировать на первую передачу входного сигнала исходного состояния путем запроса у оператора подтверждения того, что оператор желает выполнить сброс хирургического инструмента 1010, например, с помощью дисплея. В некоторых вариантах осуществления оператор может передавать второй входной сигнал исходного состояния на контроллер 3002 в течение заданного периода времени после первого входного сигнала исходного состояния путем блокировки и разблокировки блокирующего элемента 3082 во второй раз. Контроллер 3002 может быть выполнен с возможностью реагировать на вторую передачу входного сигнала исходного состояния, если передача осуществлена в пределах заданного периода времени после первой передачи, путем сброса хирургического инструмента 1010 в исходное состояние, как описано выше.
Электрический двигатель для хирургического инструмента, описанного в настоящем документе, может выполнять множество функций. Например, многофункциональный электрический двигатель может продвигать и оттягивать пусковой элемент во время пусковой последовательности. Для выполнения множества функций многофункциональный электрический двигатель может переключаться между разными рабочими состояниями. Например, электрический двигатель может выполнять первую функцию в первом рабочем состоянии и впоследствии может переключаться во второе рабочее состояние, чтобы выполнять, например, вторую функцию. В различных обстоятельствах электрический двигатель может приводить пусковой элемент дистально во время первого рабочего состояния, например, продвигающего состояния, и может оттягивать пусковой элемент проксимально во время второго рабочего состояния, например, оттягивающего состояния. В некоторых обстоятельствах электрический двигатель может поворачиваться в первом направлении во время первого рабочего состояния и может поворачиваться во втором направлении во время второго рабочего состояния. Например, поворот электрического двигателя по часовой стрелке может продвигать пусковой элемент дистально, а поворот электрического двигателя против часовой стрелки может оттягивать пусковой элемент проксимально. Электрический двигатель во время первого и второго рабочих состояний может быть сбалансирован или по существу сбалансирован так, чтобы фоновая гаптическая обратная связь или «шум», генерируемый электрическим двигателем, был сведен к минимуму. Хотя гаптическую обратную связь во время первого и второго рабочих состояний можно свести к минимуму, в некоторых обстоятельствах ее полное устранение может не происходить. Фактически такой «шум» может ожидаться оператором в процессе нормальной работы хирургического инструмента и, таким образом, может не представлять собой сигнал об обратной связи, указывающий на конкретное состояние хирургического инструмента.
В различных обстоятельствах многофункциональный электрический двигатель может выполнять дополнительные функции во время дополнительных рабочих состояний. Например, во время третьего рабочего состояния, например, состояния обратной связи, электрический двигатель может генерировать усиленную гаптическую или тактильную обратную связь для передачи информации о конкретном состоянии хирургического инструмента его оператору. Иными словами, многофункциональный электрический двигатель может приводить пусковой элемент дистально или проксимально во время пусковой последовательности, например, во время первого рабочего состояния и второго рабочего состояния соответственно, а также может генерировать усиленную гаптическую обратную связь для передачи информации о хирургическом инструменте оператору, например, во время третьего рабочего состояния. Усиленная гаптическая обратная связь, генерируемая во время третьего рабочего состояния, может по существу превышать фоновую гаптическую обратную связь или «шум», генерируемый во время первого и второго рабочих состояний. В различных вариантах осуществления усиленная гаптическая обратная связь, генерируемая во время третьего рабочего состояния, может представлять собой сигнал обратной связи для оператора, который указывает на конкретное состояние хирургического инструмента. Например, электрический двигатель может генерировать усиленную гаптическую обратную связь, когда на пусковом элементе обнаруживается заданное пороговое усилие. В таких вариантах осуществления усиленная гаптическая обратная связь может представлять собой предупреждающий сигнал для оператора, например, такой как предупреждение о потенциальной перегрузке. В других вариантах осуществления усиленная гаптическая обратная связь может передавать информацию об обновлении статуса оператору, например, такую как сигнал о том, что пусковой элемент достиг наиболее дистального положения и/или успешно завершил пусковой такт. В различных вариантах осуществления электрический двигатель во время третьего рабочего состояния может колебаться между поворотом по часовой стрелке и поворотом против часовой стрелки. Как описано в настоящем документе, резонатор или усилитель, примонтированный к электрическому двигателю, может колебаться с электрическим двигателем для оптимизации или усиления гаптической обратной связи, генерируемой электрическим двигателем. Хотя во время третьего рабочего состояния резонатор может усиливать гаптическую обратную связь, резонатор может быть сбалансирован относительно его оси поворота, например, так, чтобы фоновая гаптическая обратную связь или «шум» во время первого и второго рабочих состояний оставался сведенным к минимуму.
В различных обстоятельствах многофункциональный электрический двигатель может переключаться между разными рабочими состояниями. Например, электрический двигатель может переключаться из первого рабочего состояния во второе рабочее состояние, чтобы оттянуть пусковой элемент из дистального положения концевого эффектора. Более того, электрический двигатель может переключаться в третье рабочее состояние для передачи оператору сигнала, указывающего на конкретное состоянии хирургического инструмента. Например, когда обнаруживается клинически важное состояние, электрический двигатель может переключаться из первого рабочего состояния в третье рабочее состояние, чтобы передать оператору информацию о клинически важном состоянии. В некоторых вариантах осуществления для передачи информации о клинически важном состоянии оператору электрический двигатель может генерировать усиленную гаптическую обратную связь. Когда электрический двигатель переключается в третье рабочее состояние, продвижение пускового элемента может быть приостановлено. В различных вариантах осуществления, получив усиленную гаптическую обратную связь, оператор может принять решение: (A) возобновлять работу в первом рабочем состоянии или (B) инициировать второе рабочее состояние. Например, когда клинически важным состоянием является высокое усилие на пусковом элементе, которое может указывать на потенциальную перегрузку инструмента, оператор может принять решение: (A) возобновить продвижение пускового элемента дистально или (B) учесть предупреждение о возможной перегрузке и оттянуть пусковой элемент проксимально. Если оператор примет решение возобновлять работу в первом рабочем состоянии, несмотря на возможность перегрузки инструмента, инструмент может подвергаться риску выхода из строя. В различных вариантах осуществления обратную связь для передачи оператору информации о клинически важном состоянии может генерировать другой электрический двигатель. Например, второй электрический двигатель может генерировать сенсорную обратную связь, например, такую как шумовой, световой и/или тактильный сигнал, для передачи оператору информации о клинически важном состоянии.
Как показано на ФИГ. 170, электрический двигатель 5002 хирургического инструмента (показан в других частях документа) может содержать кожух двигателя 5004 и стержень 5006, проходящий от кожуха двигателя 5004. Хотя электрический двигатель 5002 описан в настоящем документе в качестве одного примера, другие электрические двигатели, такие как, например, двигатель 1102, могут включать раскрытые в настоящем документе идеи. Стержень 5006 может быть прикреплен к ротору (не показан), расположенному внутри кожуха двигателя 5004, а стержень 5006 может поворачиваться по мере поворота ротора. Стержень 5006 может поворачиваться в одном направлении, например, во время первого рабочего состояния, и может поворачиваться во втором направлении, например, во время второго рабочего состояния. Более того, поворот электрического двигателя 5002 в одном направлении может реализовывать первую хирургическую функцию, а поворот электрического двигателя 5002 в другом направлении может реализовывать вторую хирургическую функцию. В различных вариантах осуществления электрический двигатель 5002 и/или его стержень 5006 могут быть функционально соединены с пусковым элементом (показан в других частях документа) и могут приводить пусковой элемент во время пусковой последовательности. Например, поворот электрического двигателя 5002 по часовой стрелке может приводить пусковой элемент дистально, а поворот электрического двигателя 5002 против часовой стрелки может приводить пусковой элемент проксимально. Альтернативно поворот электрического двигателя 5002 против часовой стрелки может приводить пусковой элемент дистально, а поворот электрического двигателя 5002 по часовой стрелке может приводить пусковой элемент проксимально. Иными словами, электрический двигатель может продвигать пусковой элемент во время первого рабочего состояния и может оттягивать пусковой элемент во время второго рабочего состояния, или наоборот. В других вариантах осуществления электрический двигатель 5002 может быть функционально соединен с шарнирным механизмом (показан в других частях документа) и может шарнирно поворачивать концевой эффектор относительно рукоятки хирургического инструмента. Например, поворот электрического двигателя 5002 по часовой стрелке может шарнирно поворачивать концевой эффектор в первом направлении, а поворот электрического двигателя 5002 против часовой стрелки может шарнирно поворачивать концевой эффектор во втором направлении.
В различных вариантах осуществления резонатор или усилитель 5020 может быть смонтирован на стержне 5006 электрического двигателя 5002. Фиксировать резонатор 5020 относительно стержня 5006 может, например, шайба 5008. Более того, резонатор 5020 может быть неподвижно прикреплен к стержню 5006 так, что резонатор 5020 поворачивается и/или перемещается со стержнем 5006. В различных вариантах осуществления резонатор 5020 и/или его различные части могут быть прикреплены к стержню 5006 и/или, например, могут быть образованы с ним как единое целое.
Как показано на ФИГ. 170-172, резонатор 5020 может содержать корпус 5022, содержащий монтажное отверстие 5040 (ФИГ. 171 и 172) для приема стержня 5006 (ФИГ. 170). Например, стержень 5006 может проходить через монтажное отверстие 5040, когда резонатор 5020 прикреплен к стержню 5006. Монтажное отверстие 5040 и стержень 5006 могут быть, например, коаксиальны. В различных вариантах осуществления корпус 5022 резонатора 5020 может быть сбалансирован и/или симметричным относительно монтажного отверстия 5040, а центр массы корпуса 5022 может быть расположен, например, вдоль центральной оси монтажного отверстия 5040. В таких вариантах осуществления центр массы корпуса 5022 может быть расположен вдоль оси поворота стержня 5006, а корпус 5022 может быть сбалансирован, например, относительно стержня 5006.
В различных обстоятельствах резонатор 5020 дополнительно может содержать маятник 5030, проходящий от корпуса 5022. Например, маятник 5030 может содержать пружину или рейку 5032, проходящую от корпуса 5022, и вес 5034, проходящий от пружины 5032. В некоторых обстоятельствах резонатор 5020 и/или его маятник 5030 может быть выполнен с возможностью иметь оптимизированную собственную частоту. Как описано в настоящем документе, оптимизированная собственная частота может усиливать гаптическую обратную связь, генерируемую при колебании электрического двигателя 5002 между поворотом по часовой стрелке и поворотом против часовой стрелки, например, во время третьего рабочего состояния. В различных обстоятельствах резонатор 5020 дополнительно может содержать противовес 5024, проходящий от корпуса 5022. Как показано преимущественно на ФИГ. 172, маятник 5030 может проходить от корпуса 5022 в первом направлении X, а противовес 5024 может проходить от корпуса 5022 во втором направлении Y. Второе направление Y может быть, например, отличным и/или противоположным первому направлению X. В различных вариантах осуществления противовес 5024 может быть выполнен с возможностью балансировать массу маятника 5030 относительно монтажного отверстия 5040 (ФИГ. 171 и 172) через корпус 5022. Например, геометрическая форма и материал противовеса 5024 могут быть выбраны так, чтобы центр массы 5028 (ФИГ. 172) всего резонатора 5020 был расположен вдоль центральной оси монтажного отверстия 5040 корпуса 5022 и, таким образом, вдоль оси поворота резонатора 5020 и стержня 5006 (ФИГ. 170).
Центр массы 5028 резонатора 5020 () можно определить по следующему соотношению:
,
где - общая масса резонатора 5020, - центр массы корпуса 5022, - центр массы противовеса 5024, - центр массы пружины 5032, - центр массы веса 5034, - масса корпуса 5022, - масса противовеса 5024, - масса пружины 5032, а - масса веса 5034. Если центр массы корпуса 5022 расположен вдоль центральной оси монтажного отверстия 5040, а резонатор 5020 содержит равномерную толщину и равномерную плотность, то резонатор 5020 может быть сбалансирован относительно центральной оси монтажного отверстия 5040 в соответствии со следующим упрощенным соотношением:
,
где - площадь противовеса 5024, - площадь пружины 5032, а - площадь веса 5034.
В различных обстоятельствах, когда центр массы 5028 резонатора 5020 совмещен вдоль центральной оси монтажного отверстия 5040 и, таким образом, вдоль оси поворота стержня 5006 (ФИГ. 170), резонатор 5020 может быть сбалансирован относительно его оси поворота. В таких вариантах осуществления, поскольку резонатор 5020 сбалансирован, фоновая гаптическая обратная связь может быть сведена к минимуму во время первого и второго рабочих состояний. В различных обстоятельствах резонатор 5020 может включать в себя дополнительное или меньшее количество компонентов. Различные компоненты резонатора 5020 могут быть сбалансированы так, чтобы центр массы 5028 всего резонатора 5020 был сбалансирован относительно оси поворота резонатора 5020. Дополнительно в некоторых вариантах осуществления материал и/или плотность различных компонентов резонатора 5020 может отличаться от различных других компонентов резонатора 5020. Материал и/или плотность различных компонентов могут быть выбраны так, чтобы сбалансировать массу резонатора 5020 относительно оси поворота и/или оптимизировать собственную частоту резонатора 5020 и/или его маятника 5030, как описано в настоящем документе.
Как также показано на ФИГ. 170-172, пружина 5032 маятника 5030 может быть отклоняемой и/или деформируемой. Например, поворот резонатора 5020 может воздействовать на пружину 5032 маятника 5030, вызывая ее отклонение. Пружина 5032 может отклоняться под действием исходного поворота резонатора 5020 и может продолжать оставаться отклоненной, по мере того как резонатор 5020 продолжает поворачиваться в том же направлении и с той же скоростью поворота. Поскольку отклонение пружины 5032 остается по меньшей мере по существу постоянным в процессе по существу постоянного поворачивания резонатора 5020 в одном направлении, фоновая гаптическая обратная связь может оставаться сведенной к минимуму во время первого и второго рабочих состояний. Когда направление поворота резонатора 5020 изменяется, пружина 5032 может отклоняться в другом направлении. Например, пружина 5032 может отклоняться в первом направлении, когда резонатор 5020 вращается по часовой стрелке, и может отклоняться во втором направлении, когда резонатор 5020 поворачивается против часовой стрелки. Второе направление может быть, например, противоположным первому направлению. Иными словами, по мере того как электрический двигатель 5020 колеблется между поворотом по часовой стрелке и поворотом против часовой стрелки, пружина 5032 может многократно отклоняться в разных направлениях в ответ на изменения направления поворота. Многократные отклонения пружины 5032 в противоположных направлениях, т.е. отклоняющиеся колебания, могут генерировать усиленную гаптическую обратную связь. Например, гаптическая обратная связь, генерируемая колеблющимся резонатором 5020, который приводится в действие колеблющимся двигателем 5002 (ФИГ. 170), может быть достаточно усилена так, чтобы обеспечить для оператора сигнал, указывающий на конкретное состояние хирургического инструмента. Усиленная гаптическая обратная связь, генерируемая колеблющимся резонатором 5020 и двигателем 5002, может быть по существу больше, чем фоновая гаптическая обратная связь, сгенерированная при длительном поворачивании резонатора 5020 и двигателя 5002 в одном направлении.
В процессе применения поворачивание маятника 5030 может генерировать центробежное усилие на вес 5034, а пружина 5032 мятника 5030 может удлиняться в ответ на центробежное усилие. В различных вариантах осуществления резонатор 5020 и/или двигатель 5002 может содержать ограничитель для ограничения радиального удлинения пружины 5032. Такой ограничитель может удерживать маятник 5030 в пределах заданной радиальной границы 5050 (ФИГ. 170). В различных обстоятельствах центробежное усилие, воздействующее на вес 5034 во время третьего рабочего состояния, может быть недостаточно для удлинения маятника 5030 за пределы повторно заданной радиальной границы 5050.
В различных обстоятельствах резонатор 5020 может быть выполнен с возможностью усиливать гаптическую обратную связь, сгенерированную электрическим двигателем 5002 (ФИГ. 170) во время третьего рабочего состояния. Иными словами, резонатор 5020 может быть выполнен так, чтобы собственная частота резонатора 5020 была оптимизирована, а электрический двигатель 5002 мог колебаться с частотой, которая заставляет резонатор 5020 колебаться с его оптимизированной собственной частотой. В различных вариантах осуществления оптимизированная собственная частота резонатора 5020 может быть связана с частотой колебаний электрического двигателя 5002. Оптимизированная собственная частота резонатора 5020 может, например, совпадать и/или соответствовать частоте колебания электрического двигателя 5002. В некоторых вариантах осуществления оптимизированная собственная частота резонатора 5020 может, например, иметь сдвиг относительно частоты колебания электрического двигателя 5002.
В некоторых вариантах осуществления собственная частота резонатора 5020 может быть аппроксимирована собственной частотой маятника 5030. Например, по существу неколеблющиеся компоненты при аппроксимации собственной частоты могут быть проигнорированы. В некоторых вариантах осуществления корпус 5022 и противовес 5024 могут считаться по существу неколеблющимися компонентами резонатора 5020 и, таким образом, могут считаться оказывающими пренебрежимо малое или незначительное воздействие на собственную частоту резонатора 5020. Соответственно, колеблющийся компонент резонатора 5020, например, маятник 5030, может быть выполнен с возможностью усиливать гаптическую обратную связь, сгенерированную электрическим двигателем 5002 (ФИГ. 170) во время третьего рабочего состояния. Если масса пружины 5032 по существу меньше массы веса 5034, то собственная частота маятника 5030 () может быть аппроксимирована с использованием следующего соотношения:
,
где - коэффициент жесткости пружины 5032, а - масса веса 5034. Коэффициент жесткости пружины 5032 () можно определить по следующему соотношению:
,
где - модуль упругости пружины 5032, - второй момент инерции пружины 5032, а - длина пружины 5032. В различных вариантах осуществления коэффициент жесткости () пружины 5032 и/или масса веса 5034 () могут быть выбраны так, чтобы собственная частота маятника 5030 () соотносилась с частотой колебания электрического двигателя 5002 во время третьего рабочего состояния. Например, собственную частоту маятника 5030 можно оптимизировать, изменяя коэффициент жесткости пружины 5032 и/или массу веса 5034.
Как также показано на ФИГ. 170-172, собственную частоту резонатора 5020 и/или его маятника 5030 можно оптимизировать до частоты, которая обеспечивает для оператора оптимальную гаптическую обратную связь. Например, собственную частоту резонатора 5020 можно оптимизировать до частоты между приблизительно 50 Гц и приблизительно 300 Гц, чтобы усиливать обратную связь, испытываемую оператором. В некоторых вариантах осуществления собственную частоту резонатора 5020 можно оптимизировать до частоты, например, менее приблизительно 50 Гц, а в других вариантах осуществления резонатор 5020 можно оптимизировать до частоты более чем приблизительно 300 Гц. Более того, электрический двигатель 5002 (ФИГ. 170) может колебаться с частотой, которая заставляет резонатор 5020 колебаться с частотой, равной или приблизительно равной его собственной частоте. В некоторых вариантах осуществления электрический двигатель 5002 может заставлять резонатор 5020 колебаться в пределах диапазона усиливающих частот, включая собственную частоту резонатора 5020.
В различных вариантах осуществления частота колебания электрического двигателя 5002 может совпадать и/или соответствовать собственной частоте резонатора 5020, чтобы приводить в действие резонатор 5020 с частотой, равной или приблизительно равной его собственной частоте. В некоторых вариантах осуществления частота колебания электрического двигателя 5002 может быть приблизительно равной или равной собственной частоте резонатора 5020, а в других вариантах осуществления частота колебания электрического двигателя 5002 может иметь сдвиг относительно собственной частоты резонатора 5020. В различных вариантах осуществления частота колебания электрического двигателя 5002 может быть оптимизирована до совпадения с собственной частотой резонатора 5020. Более того, в некоторых вариантах осуществления частота колебания электрического двигателя 5002 и собственная частота резонатора 5020 могут в совокупности быть выбраны, выполнены с возможностью и/или оптимизированы для усиления гаптической обратной связи, сгенерированной электрическим двигателем 5002 во время третьего рабочего состояния.
Как показано преимущественно на ФИГ. 170, электрический двигатель 5002 может генерировать усиленную гаптическую обратную связь, когда электрический двигатель 5002 колеблется между направлением по часовой стрелке и направлением против часовой стрелки во время третьего рабочего состояния. Дополнительно поворачивание электрического двигателя 5002 во время первого и второго рабочих состояний может приводить в действие пусковой элемент (показан в других частях документа) во время пускового такта. Например, поворачивание электрического двигателя 5002 по часовой стрелке может продвигать пусковой элемент дистально, а поворачивание электрического двигателя 5002 против часовой стрелки может оттягивать пусковой элемент проксимально. Соответственно, когда электрический двигатель 5002 колеблется между направлением по часовой стрелке и направлением против часовой стрелки, дистальный конец пускового элемента может перемещаться между несколько более дистальным положением и несколько более проксимальным положением. Однако электрический двигатель 5002 может быть значительно замедлен так, чтобы колебания электрического двигателя 5002 во время третьего рабочего состояния перемещали дистальный конец пускового элемента на незначительное и/или неощутимое расстояние. В различных вариантах осуществления передаточное отношение может быть, например, от приблизительно 200:1 до приблизительно 800:1. В некоторых вариантах осуществления пусковой элемент во время третьего рабочего состояния может оставаться неподвижным. Например, зазор между двигателем 5002 и дистальным концом пускового элемента может поглощать колебания электрического двигателя 5002. Например, как показано на ФИГ. 102-104, такой зазор имеется между пусковым элементом 10060 и держателем скальпеля 10066. В различных обстоятельствах держатель скальпеля 10066 может содержать приводной язычок 10065, который проходит в приводную прорезь 10064, образованную в пусковом элементе 10060, причем длина приводной прорези 10064 между ее дистальным концом 10067 и проксимальным концом 10069 может быть больше длины приводного язычка 10065. В процессе применения необходимо достаточное перемещение пускового элемента 10060, прежде чем дистальный конец 10067 или проксимальный конец 10069 войдет в контакт с приводным язычком 10065.
Как показано на ФИГ. 173-176, электрический двигатель 5002 (ФИГ. 173 и 174) может быть расположен внутри рукоятки 5101 (ФИГ. 173) хирургического инструмента 5100 (ФИГ. 173). В различных вариантах осуществления резонатор или усилитель 5120 может быть смонтирован на стержне 5006 электрического двигателя 5002. Стержень 5006 может быть прикреплен к ротору (не показан), расположенному внутри кожуха двигателя 5004, и стержень 5006 может поворачиваться по мере поворота двигателя. Фиксировать резонатор 5120 относительно стержня 5006 может, например, шайба 5008. Более того, резонатор 5120 может крепиться к стержню 5006 так, чтобы резонатор 5120 поворачивался и/или перемещался со стержнем 5006. В некоторых обстоятельствах для передачи поворотного перемещения стержня 5006 на резонатор 5120 может использоваться, например, ключ. В различных обстоятельствах резонатор 5120 и/или его различные части могут быть прикреплены к стержню 5006 и/или, например, могут быть образованы с ним как единое целое.
Как показано преимущественно на ФИГ. 175 и 176, аналогично резонатору 5020 резонатор 5120 может содержать корпус 5122, содержащий монтажное отверстие 5140 для принятия стержня 5006 (ФИГ. 173 и 174) электрического двигателя 5002 (ФИГ. 173 и 174). Например, стержень 5006 может проходить через монтажное отверстие 5140, когда резонатор 5120 прикреплен к стержню 5006. В различных вариантах осуществления корпус 5122 резонатора 5120 может быть сбалансированным и симметричным относительно монтажного отверстия 5140, а центр массы корпуса 5122 может быть расположен, например, вдоль центральной оси монтажного отверстия 5140. Дополнительно центр массы корпуса 5122 может быть расположен вдоль оси поворота резонатора 5120 и стержня 5006 так, что корпус 5122 сбалансирован, например, относительно стержня 5006.
В различных вариантах осуществления резонатор 5120 дополнительно может содержать маятник 5130, проходящий от корпуса 5122. Например, маятник 5130 может содержать пружину или рейку 5132, проходящую от корпуса 5122, и вес 5134, проходящий от пружины 5132. В некоторых вариантах осуществления пружина 5132 может проходить вдоль оси, образующей по меньшей мере один профиль между корпусом 5122 и весом 5134. Пружина 5132 может, например, извиваться, изгибаться, перекручиваться, поворачиваться, пересекаться и/или образовывать зигзаг. Геометрия пружины 5132 может воздействовать, например, на ее коэффициент жесткости. По меньшей мере в одном варианте осуществления пружина 5132 может образовывать первую петлю 5137 на первой боковой стороне резонатора 5120 и вторую петлю 5138 на второй боковой стороне резонатора 5120. Промежуточная часть 5139 пружины 5132 может проходить поперек, например, между первой и второй петлями 5137, 5138. Аналогично пружине 5032 пружина 5132 может быть отклоняемой и может отклоняться в ответ на повороты и/или колебания резонатора 5120. Более того, в некоторых вариантах осуществления вес 5134 может включать в себя штифт 5136, который может, например, обеспечивать дополнительную массу для веса 5134. Как описано в настоящем документе, масса веса 5134 и геометрия и свойства пружины 5132 могут быть выбраны, например, так, чтобы оптимизировать собственную частоту маятника 5130 и, таким образом, собственную частоту всего резонатора 5120.
Как также показано на ФИГ. 175 и 176, резонатор 5120 дополнительно может содержать противовес 5124, проходящий от корпуса 5122. В некоторых вариантах осуществления штифт 5126 может проходить от противовеса 5124 и может, например, обеспечивать дополнительную массу для противовеса 5124. Маятник 5130 может проходить от корпуса 5122 в первом направлении X, а противовес 5124 может проходить от корпуса 5122 во втором направлении Y. Второе направление Y может быть, например, отличным и/или противоположным первому направлению X. В различных вариантах осуществления противовес 5124 может быть выполнен с возможностью балансировать массу маятника 5130 относительно монтажного отверстия 5140 через корпус 5120. Например, геометрия и материал противовеса 5124 могут быть выбраны так, чтобы центр массы 5128 резонатора 5120 был расположен вдоль центральной оси монтажного отверстия 5140 корпуса 5122 и, таким образом, вдоль оси поворота А (ФИГ. 173) резонатора 5120.
Аналогично резонатору 5020 резонатор 5120 может быть выполнен с возможностью усиливать гаптическую обратную связь, сгенерированную электрическим двигателем 5002 (ФИГ. 173 и 174) во время третьего рабочего состояния. Иными словами, резонатор 5120 может быть выполнен так, чтобы собственная частота резонатора 5120 была оптимизирована, а электрический двигатель 5002 мог колебаться с частотой, заставляющей резонатор 5120 колебаться с частотой, равной или приблизительно равной ее оптимизированной собственной частоте. Например, электрический двигатель 5002 может заставлять резонатор 5120 колебаться в пределах диапазона усиливающих частот, включая собственную частоту резонатора 5120. В некоторых вариантах осуществления собственная частота резонатора 5120 может быть аппроксимирована собственной частотой маятника 5130. В таких вариантах осуществления резонатор 5130 может быть выполнен с возможностью усиливать гаптическую обратную связь, сгенерированную электрическим двигателем 5002 во время третьего рабочего состояния. Например, маятник 5130 может быть выполнен с возможностью иметь оптимизированную собственную частоту, а электрический двигатель 5002 может заставлять резонатор 5120 колебаться с частотой, равной или приблизительно равной оптимизированной собственной частоте маятника 5130, чтобы усиливать гаптическую обратную связь, сгенерированную во время третьего рабочего состояния.
Как показано на ФИГ. 177-180, электрический двигатель 5002 (ФИГ. 177 и 178) может быть расположен внутри рукоятки 5101 (ФИГ. 177) хирургического инструмента 5100 (ФИГ. 177). В различных вариантах осуществления резонатор или усилитель 5220 может быть смонтирован на стержне 5006 (ФИГ. 170) электрического двигателя 5002. Стержень 5006 может быть прикреплен к ротору (не показан), расположенному внутри кожуха 5004, и стержень 5006 может поворачиваться по мере поворота ротора. Фиксировать резонатор 5220 относительно стержня 5006 может, например, шайба 5008 (ФИГ. 170). Более того, резонатор 5220 может быть прикреплен к стержню 5006 так, чтобы резонатор 5220 поворачивался и/или перемещался со стержнем 5006. В различных вариантах осуществления резонатор 5220 и/или его различные части могут быть прикреплены к стержню 5006 и/или, например, могут быть образованы с ним как единое целое.
Как показано преимущественно на ФИГ. 179 и 180, аналогично резонаторам 5020, 5120 резонатор 5220 может содержать корпус 5222, содержащий монтажное отверстие 5240 для приема стержня 5006 (ФИГ. 176 и 177) электрического двигателя 5002 (ФИГ. 176 и 177). Например, стержень 5006 может проходить через монтажное отверстие 5240, когда резонатор 5220 прикреплен к стержню 5006. В различных вариантах осуществления корпус 5222 резонатора 5220 может быть сбалансирован и симметричен относительно монтажного отверстия 5240, а центр массы корпуса 5222 может быть расположен, например, вдоль центральной оси монтажного отверстия 5240. Более того, центр массы корпуса 5222 может быть расположен вдоль оси поворота стержня 5006 так, что корпус 5222 сбалансирован, например, относительно стержня 5006.
В различных вариантах осуществления резонатор 5220 дополнительно может содержать маятник 5230, проходящий от корпуса 5222. Например, маятник 5230 может содержать пружину или рейку 5232, проходящую от корпуса 5222, и вес 5234, проходящий от пружины 5232. В различных вариантах осуществления пружина 5232 может искривляться, извиваться, изгибаться, перекручиваться, поворачивать, перекрещиваться и/или образовывать зигзаг между корпусом 5222 и весом 5234. Более того, в некоторых вариантах осуществления вес 5234 может включать в себя штифт 5236, который может, например, обеспечивать дополнительную массу для веса 5234. Как описано в настоящем документе, масса веса 5234 и геометрия и свойства пружины 5232 могут быть выбраны, например, для оптимизации собственной частоты маятника 5230 и, таким образом, собственной частоты всего резонатора 5220.
В различных вариантах осуществления ограничитель может ограничивать или сдерживать радиальное удлинение пружины 5232 и/или маятника 5230 в процессе поворачивания и/или колебания. Например, ограничитель может содержать барьер или удерживающую стенку вокруг по меньшей мере части маятника 5230. Например, во время первого и второго рабочих состояний пружина 5232 может деформироваться и протягивать вес 5234 в направлении барьера, который может предотвращать дополнительное удлинение пружины 5232. Например, как показано преимущественно на ФИГ. 179 и 180, резонатор 5220 может содержать ограничитель 5244. Ограничитель 5244 может содержать первую ножку 5246, которая может быть закреплена на корпусе 5222 и/или на противовесе 5224 резонатора 5220. Первая ножка 5246 может быть прикреплена к резонатору 5220 и может быть, например, выполнена с ним как единое целое и/или прикреплена к нему. Ограничитель 5244 дополнительно может содержать вторую ножку или барьерную ножку 5248, которая может проходить за вес 5234 маятника 5230, когда пружина 5232 не деформирована. Барьерная ножка 5248 может образовывать радиальную границу 5050, за пределы которой не может проходить маятник 5230. Иными словами, барьерная ножка 5248 может блокировать радиальное удлинение маятника 5230. Например, барьерная ножка 5248 может не быть в контакте с маятником 5230, когда пружина 5232 не деформирована, поскольку маятник 5230 может быть расположен внутри радиальной границы 5050. Иными словами, между весом 5234 и барьерной ножкой 5248, когда пружина 5234 не деформирована, может быть образован интервал 5249 (ФИГ. 180). Более того, барьерная ножка 5248 может не оставаться в контакте с маятником 5230, когда резонатор 5220 колеблется во время третьего рабочего состояния. Например, центробежного усилия на колеблющийся маятник 5230 во время третьего рабочего состояния может быть недостаточно для прохождения веса 5234 маятника 5230 за пределы заданной радиальной границы 5050 двигателя 5002. Несмотря на то, что интервал 5249 во время третьего рабочего состояния может уменьшаться, вес 5234, например, может не оставаться в контакте с барьерной ножкой 5248. В таких вариантах осуществления во время третьего рабочего состояния ограничитель 5244 может по существу не воздействовать на собственную частоту маятника 5230.
В различных вариантах осуществления, когда резонатор 5220 поворачивается во время первого и второго рабочих состояний, пружина 5232 маятника 5230 может быть по существу деформирована и/или удлинена. Например, поворачивание резонатора 5220 может генерировать центробежное усилие на пружину 5232, а пружина 5232 может удлиняться в ответ на центробежное усилие. В некоторых вариантах осуществления вес 5234 маятника 5230 может перемещаться в направлении и в упорный контакт с барьерной ножкой 5248 ограничителя 5244. В таких вариантах осуществления барьер 5248 может ограничивать или сдерживать дополнительное радиальное удлинение пружины 5232 во время первого и второго рабочих состояний.
В различных вариантах осуществления ограничитель 5244 может быть по существу жестким так, чтобы ограничитель 5244 сопротивлялся деформации и/или удлинению. В некоторых вариантах осуществления ограничитель 5244 может быть образован как единое целое с резонатором 5220 и/или прикреплен относительно него. В некоторых вариантах осуществления ограничитель 5244 может быть прикреплен к двигателю 5002 (ФИГ. 177 и 178I). Например, ограничитель 5244 может быть прикреплен относительно ротора и/или стержня 5006 (ФИГ. 177 и 178) двигателя 5002 и может поворачиваться и/или перемещаться с ними. В таких вариантах осуществления ограничитель 5244 может, например, поворачиваться с резонатором 5220. В различных вариантах осуществления ограничитель 5244 может быть, например, прикреплен к двигателю 5002 и/или может быть образован с ним как единое целое. В некоторых вариантах осуществления ограничитель 5244 может, например, оставаться неподвижным относительно поворачивающегося стержня 5008 и/или резонатора 5220.
Как также показано на ФИГ. 179 и 180, резонатор 5220 дополнительно может содержать противовес 5224, проходящий от корпуса 5222. В некоторых вариантах осуществления штифт 5226 может проходить от противовеса 5224 и может, например, обеспечивать дополнительную массу для противовеса 5224. Маятник 5230 может проходить от корпуса 5222 в первом направлении, а противовес 5224 может проходить от корпуса 5222 во втором направлении. Второе направление может быть, например, отличным и/или противоположным первому направлению маятника 5230. В различных вариантах осуществления противовес 5224 может быть выполнен с возможностью балансировать массу маятника 5230 и ограничителя 5244 относительно монтажного отверстия 5240 через корпус 5220 резонатора 5220. Например, геометрия и материал противовеса 5224 могут быть выбраны так, чтобы центр массы 5228 резонатора 5220 был расположен вдоль центральной оси монтажного отверстия 5240 корпуса 5222 и, таким образом, вдоль оси поворота А (ФИГ. 177) стержня 5008 (ФИГ. 177 и 178) и резонатора 5220.
Аналогично резонаторам 5020, 5120 резонатор 5220 может быть выполнен с возможностью усиливать гаптическую обратную связь, сгенерированную электрическим двигателем 5002 во время третьего рабочего состояния. Иными словами, резонатор 5220 может быть выполнен так, чтобы собственная частота резонатора 5220 была оптимизирована, а электрический двигатель 5002 мог колебаться с частотой, заставляющей резонатор 5220 колебаться с частотой, равной или приблизительно равной его оптимизированной собственной частоте. Например, электрический двигатель 5002 может заставлять резонатор 5220 колебаться в пределах диапазона усиливающих частот, включая собственную частоту резонатора 5220. В некоторых вариантах осуществления собственная частота резонатора 5220 может быть аппроксимирована собственной частотой маятника 5230. В таких вариантах осуществления маятник 5230 может быть выполнен с возможностью усиливать гаптическую обратную связь, сгенерированную электрическим двигателем 5002 во время третьего рабочего состояния. Например, маятник 5230 может быть выполнен с возможностью иметь оптимизированную собственную частоту, а электрический двигатель 5002 может заставлять резонатор 5220 колебаться с частотой, равной или приблизительно равной оптимизированной собственной частоте маятника 5230, чтобы усиливать гаптическую обратную связь, сгенерированную во время третьего рабочего состояния.
Как показано на ФИГ. 181, электрический двигатель 5002 может быть расположен внутри рукоятки 5101 хирургического инструмента 5100. В различных вариантах осуществления резонатор или усилитель 5320, аналогичный резонатору 5220, например, может быть смонтирован на стержне 5006 (ФИГ. 170) электрического двигателя 5002. Резонатор 5320 может содержать корпус 5322, содержащий монтажное отверстие 5340, например, маятник 5330, содержащий пружину 5332, вес 5334 и штифт 5336, а также, например, противовес 5324, содержащий, например, штифт 5326. В различных вариантах осуществления центр массы резонатора 5320 может лежать вдоль оси поворота А, а геометрия и материал резонатора 5230 могут быть выбраны с целью оптимизации его собственной частоты.
В различных вариантах осуществления стопорное кольцо 5344, аналогичное ограничителю 5244, может ограничивать или сдерживать радиальное удлинение пружины 5332 и/или маятника 5230 во время поворота и/или колебания. В различных вариантах осуществления стопорное кольцо 5344 может содержать барьер или удерживающую стенку вокруг по меньшей мере части маятника 5330. В некоторых вариантах осуществления стопорное кольцо 5344 может содержать, например, кольцо, охватывающее резонатор 5320. В различных вариантах осуществления стопорное кольцо 5344 может быть прикреплено к электрическому двигателю 5002, например, такому как кожух двигателя 5004. В других вариантах осуществления стопорное кольцо 5344 может быть прикреплено, например, к рукоятке 5101 хирургического инструмента 5100. В других вариантах осуществления стопорное кольцо 5344 может быть прикреплено к ротору и/или стержню 5006 (ФИГ. 170) электрического двигателя 5002, например, так, чтобы стопорное кольцо 5344 поворачивалось со стержнем 5006 и/или резонатором 5320. В различных вариантах осуществления стопорное кольцо 5344 может быть по существу жестким так, чтобы оно сопротивлялось деформации и/или удлинению.
Стопорное кольцо 5344 может образовывать радиальную границу, за пределы которой не может проходить маятник 5330. Например, маятник 5330 может не быть в контакте со стопорным кольцом 5344, когда пружина 5332 не деформирована. Иными словами, между весом 5334 маятника 5330 и стопорным кольцом 5344 может быть образован интервал, когда пружина 5334 не деформирована. Более того, маятник 5330 может оставаться не в контакте со стопорным кольцом 5344, когда резонатор 5320 колеблется во время третьего рабочего состояния. Например, центробежного усилия на колеблющийся маятник 5330 во время третьего рабочего состояния может быть недостаточно, чтобы протянуть вес 5334 маятника 5330 за пределы заданной радиальной границы. Несмотря на то, что интервал, образованный между весом 5334 и стопорным кольцом 5344, во время третьего рабочего состояния может уменьшаться, вес 5334, например, может оставаться не в контакте со стопорным кольцом 5344. В таких вариантах осуществления во время третьего рабочего состояния стопорное кольцо 5344 может по существу не воздействовать на собственную частоту маятника 5330.
В различных вариантах осуществления, когда резонатор 5320 поворачивается во время первого и второго рабочих состояний, пружина 5332 маятника 5330 может быть по существу деформирована и/или удлинена. Например, поворот резонатора 5320 может генерировать центробежное усилие на пружину 5332, а пружина 5332 может удлиняться в ответ на центробежное усилие. В некоторых вариантах осуществления вес 5334 маятника 5330 может перемещаться в направлении и в упорный контакт со стопорным кольцом 5344. В таких вариантах осуществления стопорное кольцо 5344 может ограничивать или сдерживать дополнительное радиальное удлинение пружины 5332 во время первого и второго рабочих состояний.
В различных вариантах осуществления хирургический инструмент 5100 (ФИГ. 177) может содержать систему управления (не показана), которая может управлять электрическим двигателем 5002. В различных вариантах осуществления система управления, например, может содержать один или более компьютеров, процессоров, микропроцессоров, схем, элементов схем (например, транзисторы, резисторы, конденсаторы, индукционные катушки и т.д.), интегральных схем, специализированных интегральных схем (СИС), программируемых логических устройств (ПЛУ), процессоров для обработки цифровых сигналов (DSP), программируемых пользователем вентильных матриц (ППВМ), логических вентилей, регистров, полупроводниковых устройств, кристаллов, микрокристаллов и/или наборов кристаллов. Система управления может запускать, приостанавливать, возобновлять и/или прерывать различные рабочие состояния электрического двигателя 5002. Например, электрический двигатель 5002 может выполнять первую функцию, например, продвижение пускового элемента дистально, во время первого рабочего состояния, и впоследствии может переключаться во второе рабочее состояние для выполнения второй функции, например, оттягивание пускового элемента проксимально. Пусковой элемент может быть продвинут дистально, например, чтобы рассекать ткань на заданную длину и/или вытолкнуть и/или образовать заданное число скоб (показаны в других частях документа). В различных вариантах осуществления, когда ткань была рассечена на заданную длину и/или было вытолкнуто и/или образовано заданное число скоб, система управления может управлять электрическим двигателем 5002, переключая во второе рабочее состояние. Во время второго рабочего состояния пусковой элемент может быть оттянут проксимально, например, для подготовки к последующему пусковому такту. В некоторых вариантах осуществления электрический двигатель 5002 может переключаться в третье рабочее состояние до того, как пусковой элемент завершит рассечение на заданную длину и/или вытолкнет и/или образует заданное число скоб. Например, электрический двигатель 5002 может преждевременно переключаться из первого рабочего состояния в третье рабочее состояние, чтобы передать оператору сигнал, указывающий на состояние хирургического инструмента. В различных вариантах осуществления электрический двигатель 5002 может переключаться в третье рабочее состояние для передачи оператору предупреждающего сигнала о возможной перегрузке. В других вариантах осуществления усиленная гаптическая обратная связь может передавать информацию об обновлении статуса оператору, например, такую как сигнал о том, что пусковой элемент достиг наиболее дистального положения и/или успешно завершил пусковой такт.
В различных вариантах осуществления хирургический инструмент 5100 может быть выполнен с возможностью преодолевать максимальное пороговое усилие для рассечения ткани. Когда усилие, приложенное к пусковому элементу, превышает максимальное пороговое усилие, хирургический инструмент 5100 может не работать должным образом. Например, когда пусковой элемент пытается рассечь более толстую и/или более плотную ткань, то более толстая и/или более плотная ткань может оказывать на пусковой элемент усилие, превышающее максимальное пороговое усилие. Соответственно, пусковой элемент может не иметь возможности рассекать более толстую и/или более плотную ткань. В таких вариантах осуществления электрический двигатель 5002 может переключаться в третье рабочее состояние, чтобы предупредить оператора о том, что возможна перегрузка и/или выход хирургического инструмента 5100 из строя. В различных вариантах осуществления хирургический инструмент 5100 может содержать датчик (не показан). Датчик может быть расположен в концевом эффекторе (показан в других частях документа) и, например, может быть выполнен с возможностью обнаруживать усилие, приложенное к пусковому элементу во время пусковой последовательности. В некоторых вариантах осуществления датчик и система управления могут находиться в связи для передачи сигнала. В таких вариантах осуществления, когда усилие, обнаруженное датчиком, превышает максимальное пороговое усилие, система управления может переключать электрический двигатель 5002 в третье рабочее состояние. В третьем рабочем состоянии, как описано в настоящем документе, продвижение пускового элемента может быть приостановлено, а электрический двигатель может генерировать усиленную гаптическую обратную связь, передавая оператору предупреждение о возможной перегрузке.
В ответ на усиленную гаптическую обратную связь оператор может принять решение возобновлять работу в первом рабочем состоянии или инициировать второе рабочее состояние. Например, оператор может принять решение возобновить продвижение пускового элемента дистально, т.е. работать с хирургическим инструментом в предупреждающем рабочем состоянии, или учесть предупреждение о возможной перегрузке и оттянуть пусковой элемент проксимально, т.е. работать с хирургическим инструментом в модифицированном рабочем состоянии. Если оператор решает продолжить работу с хирургическим инструментом в предупреждающем рабочем состоянии, хирургический инструмент 5100 может подвергаться риску выхода из строя. В различных вариантах осуществления хирургический инструмент 5100 может содержать клавишу ввода (не показана), например, такую как множество рычагов и/или кнопок. В различных вариантах осуществления клавиша ввода может находиться в связи с системой управления для передачи сигнала. Оператор может управлять хирургическим инструментом, вводя входные данные через клавишу ввода. Например, оператор может выбрать первую кнопку клавиши ввода, чтобы возобновить продвижение пускового элемента, т.е. войти в предупреждающее рабочее состояние, или может выбрать вторую кнопку клавиши ввода, чтобы оттянуть пусковой элемент, т.е. войти в модифицированное рабочее состояние. В различных вариантах осуществления оператор может выбрать дополнительную кнопку и/или рычаг для выбора другого рабочего состояния.
Несмотря на то, что хирургический инструмент 5100 может выйти из строя при работе в предупреждающем рабочем состоянии, оператор хирургического инструмента 5100 может решить, что риск выхода из строя перевешивает необходимость и/или актуальность хирургической функции. Например, когда важно время, оператор может решить, что риск выхода инструмента из строя перевешивает критическая потребность оперативно завершить (или попытаться завершить) хирургическое рассечение и/или сшивание скобами. Более того, позволяя оператору определять порядок действий, во время хирургической операции оператор может приложить комплексные знания, и меньше вероятность того, что оператор будет поставлен в тупик и/или введен в замешательство хирургическим инструментом 5100.
В различных вариантах осуществления генерировать обратную связь для передачи информации оператору может другой двигатель. Например, первый двигатель может приводить в действие пусковой элемент во время пусковой последовательности, а второй двигатель может генерировать обратную связь. В различных вариантах осуществления второй двигатель может генерировать сенсорную обратную связь, например, такую как шумовой, световой и/или тактильный сигнал для передачи информации оператору. Более того, в некоторых вариантах осуществления система управления может управлять множеством двигателей хирургического инструмента.
Как показано преимущественно на ФИГ. 180, способ работы хирургической системы или хирургического инструмента может включать в себя множество рабочих состояний хирургического инструмента. Например, хирургический инструмент сначала может работать в исходном рабочем состоянии 5402 и впоследствии может работать в одном из вторичных рабочих состояний 5412 или 5414. Вторичное рабочее состояние может представлять собой, например, предупреждающее рабочее состояние 5412 или, например, модифицированное рабочее состояние 5414. Когда хирургический инструмент работает в исходном рабочем состоянии 5402, на этапе 5404 может быть инициирована исходная хирургическая функция. Исходная хирургическая функция может представлять собой одну или более различных функций хирургического инструмента, например, таких как зажатие ткани между браншами концевого эффектора, шарнирный поворот концевого эффектора, продвижение пускового элемента, оттягивание пускового элемента, открытие браншей концевого эффектора и/или повтор и/или комбинирование различной(ых) функции(й). После инициации исходной хирургической функции хирургический инструмент может обнаруживать состояние хирургического инструмента на этапе 5406. Например, когда исходная хирургическая функция продвигает пусковой элемент, датчик может обнаруживать клинически важное состояние, например, такое как усилие на продвигающийся пусковой элемент, превышающее пороговое усилие.
Как также показано на ФИГ. 180, в ответ на обнаруженное состояние хирургический инструмент может приостанавливать исходную хирургическую функцию на этапе 5408. Дополнительно на этапе 5410 хирургический инструмент может обеспечивать оператору хирургического инструмента обратную связь. Обратная связь может представлять собой сенсорную обратную связь, например, такую как шумовой, световой и/или тактильный сигнал. В некоторых вариантах осуществления первый двигатель может приостанавливать исходную хирургическую функцию, а второй двигатель может генерировать сенсорную обратную связь. Альтернативно, как описано в настоящем документе, многофункциональный электрический двигатель, например, такой как электрический двигатель 5002, может переключаться из первого рабочего состояния, или продвигающего состояния, в третье рабочее состояние, или состояние обратной связи, в котором электрический двигатель колеблется для генерирования усиленной гаптической обратной связи. Когда многофункциональный электрический двигатель колеблется для генерирования усиленной гаптической обратной связи, продвижение и/или втягивание пускового элемента может быть приостановлено и/или уменьшено до незначительного и/или неощутимого уровня благодаря большому передаточному отношению между электрическим двигателем и пусковым элементом. В таких вариантах осуществления, в которых многофункциональный двигатель переключается из первого рабочего состояния в третье рабочее состояние, приостановка исходной хирургической функции на этапе 5408 и обеспечение обратной связи для оператора на этапе 5410 могут происходить, например, одновременно или приблизительно одновременно.
В некоторых вариантах осуществления после того, как хирургический инструмент передал оператору информацию об обратной связи, указывающую на конкретное состояние, оператор может определять дальнейшие действия. Например, оператор может принять решение о выборе между множеством возможных рабочих состояний. В различных вариантах осуществления оператор может принять решение войти в предупреждающее рабочее состояние 5412 или в модифицированное рабочее состояние 5414. Например, как показано на ФИГ. 180, оператор может выбирать исходную хирургическую функцию на этапе 5416 или может выбирать модифицированную хирургическую функцию на этапе 5418. В различных вариантах осуществления оператор может взаимодействовать, например, с клавишей, кнопкой и/или рычагом для выбора одного из вторичных рабочих состояний. Если оператор выбирает исходную хирургическую функцию на этапе 5416, хирургический инструмент может возобновить исходную хирургическую функцию на этапе 5418. Если оператор выбирает модифицированную хирургическую функцию на этапе 5420, хирургический инструмент может инициировать модифицированную хирургическую функцию на этапе 5422.
На ФИГ. 183-192 показаны различные варианты осуществления устройства, системы и способа определения абсолютного положения эндокатера с вращающимся или линейным приводом. Для управляемых микроконтроллером эндокатеров необходимы значения положения и скорости, чтобы можно было надлежащим образом управлять шарнирным поворотом, пуском и другими хирургическими функциями. В прошлом это достигалось с помощью применения поворотных регуляторов, прикрепленных к двигателям привода, которые позволяют микроконтроллеру прогнозировать положение путем подсчета числа шагов, которые двигатель сделал назад и вперед. Предпочтительно в различных ситуациях заменить эту систему компактным механизмом, который обеспечивает для микроконтроллера уникальный сигнал о положении для каждого возможного местонахождения толкающей штанги или скальпеля. Различные примеры реализации таких механизмов датчика абсолютного положения для эндокатера с вращающимся или линейным приводом конкретно описаны в связи с ФИГ. 183-192.
На ФИГ. 183 представлен вид в перспективе с пространственным разделением компонентов рукоятки хирургического инструмента 1042, изображенной на ФИГ. 34, на котором показана часть сенсорного механизма 7002 системы абсолютного позиционирования 7000 в соответствии с одним вариантом осуществления. Рукоятка хирургического инструмента 1042, изображенная на ФИГ. 34, подробно описана в связи с ФИГ. 34. Соответственно, для краткости и ясности описание, отличное от описания элементов, связанных с сенсорным механизмом 7002 системы абсолютного позиционирования 7000, такое как подробное описание рукоятки хирургического инструмента 1042, изображенной на ФИГ. 34, в данной части повторяться не будет. Соответственно, как показано на ФИГ. 183, рукоятка 1042 кожуха 1040 хирургического инструмента функционально поддерживает систему пускового привода 1100, выполненную с возможностью прилагать пусковые движения к соответствующим частям сменного узла стержня. В системе пускового привода 1100 может использоваться электрический двигатель 1102. В различных формах двигатель 1102 может представлять собой приводной щеточный двигатель постоянного тока с максимальной скоростью поворота, например, приблизительно 25 000 оборотов в минуту. В других конфигурациях двигатель может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель. Батарея 1104 (или «источник питания», или «блок питания»), такая как, например, литий-ионная батарея, может быть соединена с рукояткой 1042 и может подавать питание на узел платы со схемой управления 1106 и в конечном итоге двигатель 1102. Кожух батареи 1104 может быть выполнен с возможностью разъемно монтироваться к рукоятке 1042 для подачи управляющего питания к хирургическому инструменту 1010 (ФИГ. 33). В качестве источника питания для подачи питания на двигатель может применяться ряд последовательно соединенных элементов питания. В дополнение к этому источник питания может быть съемным и/или перезаряжаемым.
Как кратко описано выше в отношении различных других форм, электрический двигатель 1102 может включать в себя поворачиваемый стержень (не показан), функционально стыкующийся с узлом зубчатого редуктора 1108, который монтируется так, что находится в сцепленном зацеплении с набором или рейкой приводных зубцов 1112 на выполненном с возможностью продольного перемещения приводном элементе 1110. В процессе применения полярность напряжения, обеспечиваемая батареей, позволяет электрическому двигателю 1102 работать в направлении по часовой стрелке, причем полярность напряжения, приложенного к электрическому двигателю батареей, может быть изменена на обратную для работы электрического двигателя 1102 в направлении против часовой стрелки. Когда электрический двигатель 1102 поворачивается в одном направлении, приводной элемент 1110 будет аксиально приводиться в дистальном направлении D. Когда двигатель 1102 приводится в противоположном направлении вращения, приводной элемент 1110 будет аксиально приводиться в проксимальном направлении P. Рукоятка 1042 может включать в себя переключатель, выполненный с возможностью изменять на обратную полярность, приложенную к электрическому двигателю 1102 батареей. Как и в других формах, описанных в настоящем документе, рукоятка 1042 также может включать в себя датчик, выполненный с возможностью обнаруживать положение приводного элемента 1110 и/или направление, в котором перемещается приводной элемент 1110.
На ФИГ. 184 представлен вид сбоку в вертикальной проекции рукоятки, изображенной на ФИГ. 183, причем часть кожуха рукоятки удалена для демонстрации части сенсорного механизма 7002 системы абсолютного позиционирования 7000 в соответствии с одним вариантом осуществления. Кожух 1040 рукоятки 1042 поддерживает узел платы со схемой управления 1106, который содержит необходимые логические и другие компоненты схемы, необходимые для реализации системы абсолютного позиционирования 7000.
На ФИГ. 185 представлена принципиальная схема системы абсолютного позиционирования 7000, содержащей управляемую микроконтроллером 7004 электроприводную схему механизма, содержащую сенсорный механизм 7002, в соответствии с одним вариантом осуществления. Элементы электрической и электронной схемы, связанные с системой абсолютного позиционирования 7000 и/или сенсорным механизмом 7002, поддерживаются узлом платы со схемой управления 1106. Микроконтроллер 7004 по существу содержит функционально связанные с ним память 7006 и микропроцессор 7008 («процессор»). Процессор 7008 управляет схемой драйвера двигателя 7010, которая управляет положением и скоростью двигателя 1102. Двигатель 1102 функционально соединен с сенсорным механизмом 7002 и датчиком механизма абсолютного позиционирования 7012, обеспечивающим для микроконтроллера 7004 уникальный сигнал о положении для каждого возможного местонахождения толкающей штанги или скальпеля хирургического инструмента 1010 (ФИГ. 33). Уникальный сигнал о положении передается на микроконтроллер 7004 через элемент обратной связи 7024. Следует понимать, что уникальный сигнал о положении может представлять собой аналоговый сигнал или цифровое значение на основе интерфейса между датчиком положения 7012 и микроконтроллером 7004. В одном варианте осуществления, описанном ниже в настоящем документе, интерфейс между датчиком положения 7012 и микроконтроллером 7004 представляет собой стандартный последовательный периферийный интерфейс (SPI), а уникальный сигнал о положении представляет собой цифровое значение, представляющее положение сенсорного элемента 7026 за один оборот. Значение, представляющее абсолютное положение сенсорного элемента 7026 за один оборот может быть сохранено в памяти 7006. Значение обратной связи об абсолютном положении сенсорного элемента 7026 соответствует положению элементов шарнира и скальпеля. Таким образом, значение обратной связи об абсолютном положении сенсорного элемента 7026 обеспечивает управление положением элементов шарнира и скальпеля по обратной связи.
Батарея 1104 или другой источник питания обеспечивает питание системы абсолютного позиционирования 7000. В дополнение к этому может быть предусмотрен другой(ие) датчик(и) 7018 для измерения других параметров, связанных с системой абсолютного позиционирования 7000. Также могут быть предусмотрены один или более дисплейных индикаторов 7020, которые могут включать в себя звуковой компонент.
Как показано на ФИГ. 185, сенсорный механизм 7002 обеспечивает уникальный сигнал о положении, соответствующий местонахождению выполненного с возможностью продольного перемещения приводного элемента 1110. Электрический двигатель 1102 может включать в себя поворачиваемый стержень 7016, функционально состыкованный с узлом зубчатых колес 7014, который смонтирован в сцепленном зацеплении с набором или рейкой приводных зубцов 1112 (ФИГ. 183) на приводном элементе 1110, выполненном с возможностью продольного перемещения. Сенсорный элемент 7026 может быть функционально соединен с узлом зубчатых колес 7104 так, чтобы один оборот сенсорного элемента 7026 соответствовал некоторому линейному продольному поступательному перемещению приводного элемента 1110, выполненного с возможностью продольного перемещения, как более подробно описано ниже в настоящем документе. В одном варианте осуществления механизм шестерней и датчиков может быть соединен с линейным исполнительным механизмом с помощью реечного и шестереночного механизма или с вращающимся исполнительным механизмом с помощью цилиндрической прямозубой передачи или другого соединения. Для вариантов осуществления, содержащих конфигурацию с вращающимся винтовым приводом и требующих большого числа оборотов, между приводным элементом и датчиком может использоваться шестереночный механизм, подобный червячному элементу или колесу.
В соответствии с одним вариантом осуществления настоящего описания сенсорный механизм 7002 системы абсолютного позиционирования 7000 предусмотрен более надежный датчик положения 7012 для применения с хирургическими устройствами. Обеспечивая уникальный сигнал о положении или значение для каждого возможного положения исполнительного механизма, такой механизм устраняет необходимость в этапе обнуления или калибровки, а также снижает возможность отрицательного воздействия конструкции в тех случаях, когда состояния шума или ограничения питания могут приводить к ошибкам в определении положения, как в традиционных конфигурациях с поворотным регулятором.
В одном варианте осуществления сенсорный механизм 7002 системы абсолютного позиционирования 7000 заменяет традиционные поворотные регуляторы, которые, как правило, прикрепляются к ротору двигателя, и заменяет их на датчик положения 7012, генерирующий уникальный сигнал о положении для каждого поворотного положения во время одного оборота сенсорного элемента, связанного с датчиком положения 7012. Таким образом, один оборот сенсорного элемента, связанного с датчиком положения 7012, эквивалентен продольному линейному смещению d1 выполненного с возможностью продольного перемещения приводного элемента 1110. Иными словами, d1 представляет собой продольное линейное расстояние, на которое выполненный с возможностью продольного перемещения приводной элемент 1110 перемещается из точки a в точку b после одного оборота сенсорного элемента, соединенного с выполненным с возможностью продольного перемещения приводным элементом 1110. Сенсорный механизм 7002 может быть соединен понижающей передачей, что приводит к тому, что датчик положения 7012 завершает только один поворот за полный такт выполненного с возможностью продольного перемещения приводного элемента 1110. При подходящем передаточном отношении полный такт выполненного с возможностью продольного перемещения приводного элемента 1110 может быть представлен в виде одного оборота датчика положения 7012.
Для обеспечения уникального сигнала о положении при более чем одном обороте датчика положения 7012 по отдельности или в комбинации с понижающей передачей может использоваться серия переключателей от 7022a до 7022n, где n - это целое число больше единицы. Состояние переключателей 7022a-7022n передается назад на микроконтроллер 7004, который использует логику для определения уникального сигнала о положении, соответствующего продольному линейному смещению d1+d2+ … dn выполненного с возможностью продольного перемещения приводного элемента 1110.
Соответственно, система абсолютного позиционирования 7000 обеспечивает абсолютное положение выполненного с возможностью продольного перемещения приводного элемента 1110 при включенном питании инструмента без оттягивания или продвижения выполненного с возможностью продольного перемещения приводного элемента 1110 в положение сброса (нулевое или исходное), которое может быть необходимо в традиционных поворотных регуляторах, которые для прогнозирования положения исполнительного механизма устройства, толкающей штанги, скальпеля и т.п. лишь отсчитывают число шагов двигателя вперед или назад.
В различных вариантах осуществления датчик положения 7012 сенсорного механизма 7002 может содержать один или более магнитных датчиков, аналоговых роторных датчиков, таких как потенциометр, матрица аналоговых элементов Холла, которые, например, выводят, помимо прочего, уникальную комбинацию сигналов или значений положения.
В различных вариантах осуществления микроконтроллер 7004 может быть запрограммирован для выполнения различных функций, таких как точный контроль скорости и положения систем скальпеля и шарнирного поворота. Используя известные физические свойства, микроконтроллер 7004 может быть выполнен с возможностью моделировать ответ действительной системы в программном обеспечении контроллера 7004. Моделированный ответ сравнивается (с зашумлением и дискретно) с измеренным ответом действительной системы для получения «наблюдаемого» ответа, который применяется для принятия действительных решений по обратной связи. Наблюдаемый ответ - это благоприятное скорректированное значение, которое балансирует сглаженный непрерывный характер моделированного ответа с измеренным ответом, который может обнаруживать внешние воздействия на систему.
В различных вариантах осуществления система абсолютного позиционирования 7000 дополнительно может содержать и/или может быть запрограммирована для реализации следующих функций. Контроллер обратной связи, который может представлять собой один из любых контроллеров обратной связи, включая без ограничений следующее: ПИД-регулятор, обратную связь по состоянию и адаптивный контроллер. Источник питания преобразует сигнал от контроллера обратной связи в физический входной сигнал системы, в данном случае - напряжение. Другие примеры включают в себя без ограничений широтно-импульсное модулированное (ШИМ) напряжение, ток и усилие. Двигатель 1102 может представлять собой щеточный двигатель постоянного тока с зубчатой передачей и механическими звеньями с системой шарнира или скальпеля. Может (Могут) быть обеспечен(ы) другой(ие) датчик(и) 7018 для измерения физических параметров физической системы в дополнение к положению, измеренному датчиком положения 7012. Так как это цифровой сигнал (или соединение с системой получения цифровых данных), выходной сигнал будет иметь конечное разрешение и частоту выборки. Может быть предусмотрена схема сравнения и комбинирования для комбинирования моделированного ответа и измеренного ответа с применением алгоритмов, таких как, без ограничений, средневзвешенное значение и теоретическая петля управления, которая приближает моделированный ответ в направлении измеренного ответа. При моделировании физической системы учет таких свойств, как масса, инерционное вязкое трение, индуктивность, сопротивление и т.п., позволяет прогнозировать то, какими будут состояния и выходные сигналы физической системы, на основе известных входных данных.
В одном варианте осуществления микроконтроллер 7004 может представлять собой, например, LM 4F230H5QR производства компании Texas Instruments. В одном варианте осуществления Texas Instruments LM4F230H5QR представляет собой процессорное ядро ARM Cortex-M4F, содержащее однотактную флеш-память на кристалле 7006 объемом 256 Кб или другую энергонезависимую память с частотой максимум 40 МГц, буфер предвыборки для повышения производительности выше 40 МГц, однотактное оперативное запоминающее устройство (ООЗУ) объемом 32 Кб, внутреннее постоянное запоминающее устройство (ПЗУ) с загруженным программным обеспечением StellarisWare, электрически стираемую программируемую постоянную память (ЭСППЗУ) объемом 2 Кб, два модуля широтно-импульсной модуляции (ШИМ) всего с 16 усовершенствованными ШИМ-выходами для движения и подачи питания, два аналога импульсных датчиков положения (QEI), два 12-битных аналогово-цифровых преобразователя (АЦП) с 12 аналоговыми входными каналами, помимо других элементов, информацию о которых можно получить из паспорта изделия. В качестве замены в системе абсолютного позиционирования 7000 могут применяться другие микроконтроллеры. Соответственно, настоящее описание не должно быть ограничено в этом контексте.
В одном варианте осуществления драйвер 7010 может представлять собой A3941 производства компании Allegro Microsystems, Inc. Драйвер A3941 7010 представляет собой полномостовой контроллер для применения с внешними N-канальными металлоксидными полупроводниковыми полевыми транзисторами (MOSFET), специально выполненными с возможностью обеспечивать индуктивные нагрузки, такие как щеточные двигатели постоянного тока. Драйвер 7010 содержит уникальный регулятор накачки заряда, который обеспечивает полный (>10 В) привод вентиля для снижения напряжений батареи до 7 В, а также позволяет A3941 работать со сниженным до 5,5 В приводом вентиля. Для обеспечения необходимого для N-канальных MOSFET-транзисторов напряжения питания, превышающего возможности батареи, может использоваться конденсатор в цепи положительной обратной связи. Внутренний генератор накачки заряда для привода верхнего плеча обеспечивает работу с постоянным током (100% рабочий цикл). Полномостовая схема может быть приведена в действие в режиме с быстрым или медленным затуханием с применением диодного или синхронного выпрямления. В режиме с медленным затуханием обратная циркуляция тока может осуществляться в полевых транзисторах (FET) верхнего или нижнего плеча. Силовые FET защищены от пробоя с помощью регулируемой резистором бестоковой паузы. Встроенные средства диагностики обеспечивают указание на недостаточное напряжение, перегрев и сбой силового моста и могут быть выполнены с возможностью защищать силовые MOSFET-транзисторы от большинства состояний короткого замыкания. В качестве замены в системе абсолютного позиционирования 7000 могут применяться другие драйверы двигателя. Соответственно, настоящее описание не должно быть ограничено в этом контексте.
После описания общей архитектуры реализации различных вариантов осуществления системы абсолютного позиционирования 7000 для сенсорного механизма 7002 описание обращается к ФИГ. 186-192 для описания одного варианта осуществления сенсорного механизма системы абсолютного позиционирования 7000. В варианте осуществления, показанном на ФИГ. 186, сенсорный механизм 7002 содержит магнитный датчик положения 7100, сенсорный элемент с биполярным магнитом 7102, держатель магнита 7104, который делает один оборот на каждый полный такт приводного элемента 1110 (ФИГ. 183-185), выполненного с возможностью продольного перемещения, и узел зубчатых колес 7106 для обеспечения понижающей передачи. Предусмотрен структурный элемент, такой как кронштейн 7116, поддерживающий узел зубчатых колес 7106, держатель магнита 7104 и магнит 7102. Магнитный датчик положения 7100 содержит один или более магнитных сенсорных элементов, таких как элементы Холла, и расположен в непосредственной близости от магнита 7102. Соответственно, по мере поворачивания магнита 7102 магнитные сенсорные элементы магнитного датчика положения 7100 определяют абсолютное угловое положение магнита 7102 за один оборот.
В различных вариантах осуществления в системе абсолютного позиционирования 7000 может использоваться любое число магнитных сенсорных элементов, например, магнитных датчиков, классифицируемых в соответствии с тем, измеряют ли они общее магнитное поле или векторные компоненты магнитного поля. Методики, применяемые при производстве обоих типов магнитных датчиков, охватывают многие аспекты физики и электроники. Технологии, применяемые для измерения магнитного поля включают в себя, помимо прочего, индукционную катушку, магнитный датчик с оптической накачкой, ядерную прецессию, сверхпроводящий магнитометр (SQUID), эффект Холла, анизотропное магнитосопротивление, гигантское магнитосопротивление, магнитные туннельные переходы, гигантский магнитоимпеданс, магнитострикционные/пьезоэлектрические композиты, магнитодиод, магнитотранзистор, оптоволокно, магнитооптические датчики и магнитные датчики на основе микроэлектромеханических систем.
В показанном варианте осуществления узел зубчатых колес 7106 содержит первую шестерню 7108 и вторую шестерню 7110, которые находятся в сцепленном зацеплении для обеспечения соединения с передаточным отношением 3:1. Третья шестерня 7112 поворачивается вокруг стержня 7114. Третья шестерня находится в сцепленном зацеплении с выполненным с возможностью продольного перемещения приводным элементом 1110 и поворачивается в первом направлении по мере того, как выполненный с возможностью продольного перемещения приводной элемент 1110 продвигается в дистальном направлении D (ФИГ. 183) и поворачивается во втором направлении по мере того, как выполненный с возможностью продольного перемещения приводной элемент 1110 оттягивается в проксимальном направлении P (ФИГ. 183). Вторая шестерня 7110 поворачивается вокруг того же стержня 7114, поэтому поворот второй шестерни 7110 вокруг стержня 7114 соответствует продольному поступательному перемещению выполненного с возможностью продольного перемещения приводного элемента 1110. Таким образом, один полный такт выполненного с возможностью продольного перемещения приводного элемента 1110 в дистальном или проксимальном направлениях D, P соответствует трем поворотам второй шестерни 7110 и одному повороту первой шестерни 7108. Так как держатель магнита 7104 соединен с первой шестерней 7108, держатель магнита 7104 совершает один полный поворот с каждым полным тактом выполненного с возможностью продольного перемещения приводного элемента 1110.
На ФИГ. 187 представлен вид в перспективе с пространственным разделением компонентов сенсорного механизма 7002 системы абсолютного позиционирования 7000, на котором показан узел платы со схемой управления 1106 и относительное совмещение элементов сенсорного механизма 7002 в соответствии с одним вариантом осуществления. Датчик положения 7100 (на этом виде не показан) поддерживается держателем датчика положения 7118, образующим отверстие 7120, подходящее для содержания в нем датчика положения 7100, точно совмещенного с поворачивающимся магнитом 7102 снизу. Фиксатор 7120 соединен с кронштейном 7116 и узлом платы со схемой управления 1106 и остается неподвижным при повороте магнита 7102 с держателем магнита 7104. Втулка 7122 предусмотрена для сопряжения с узлом первой шестерни 7108/держателя магнита 7104.
На ФИГ. 188-190 представлены дополнительные виды сенсорного механизма 7002 в соответствии с одним вариантом осуществления. В частности, на ФИГ. 188 показан полный сенсорный механизм 7002, который расположен в рабочем режиме. Держатель датчика положения 7118 размещен ниже узла платы со схемой управления 1106 и герметично охватывает держатель магнита 7104 и магнит 7102. На ФИГ. 189 показан магнит 7102, размещенный ниже отверстия 7120, образованного в держателе датчика положения 7118. Датчик положения 7100 и узел платы со схемой управления 1106 для ясности не показаны. На ФИГ. 190 показан сенсорный механизм 7002 с удаленным узлом платы со схемой управления 1106, держателем датчика положения 7118, датчиком положения 7100 и магнитом 7102 для демонстрации отверстия 7124, которое принимает магнит 7102.
На ФИГ. 191 показан вид сверху сенсорного механизма 7002 с удаленной платой со схемой управления 1106, но все еще с показанными электронными компонентами, чтобы показать относительное положение между датчиком положения 7100 и компонентами схемы 7126 в соответствии с одним вариантом осуществления. В варианте осуществления, показанном на ФИГ. 186-191, узел зубчатых колес 7106, состоящий из первой шестерни 7108 и второй шестерни 7110, имеет передаточное отношение 3:1 так, чтобы три поворота второй шестерни 7110 обеспечивали один поворот первой шестерни 7108 и, таким образом, держателя магнита 7104. Как описано ранее, датчик положения 7100 остается неподвижным, тогда как узел держателя магнита 7104/магнита 7102 поворачивается.
Как описано выше, узел зубчатых колес может использоваться для приведения в действие держателя магнита 7104 и магнита 7102. Узел зубчатых колес может применяться в различных обстоятельствах по мере того, как относительное поворачивание между одной шестерней в узле зубчатых колес и другой шестерней в узле зубчатых колес можно надежно предсказать. В различных других обстоятельствах для приведения в действие держателя 7104 и магнита 7102 могут использоваться любые подходящие средства приведения в действие, при условии, что можно надежно предсказать соотношение между выходным сигналом двигателя и поворачиванием магнита 7102. Такие средства могут, например, включать в себя узел колеса, включающий по меньшей мере два находящихся в контакте колеса, такие как, например, пластиковые колеса и/или эластомерные колеса, которые могут передавать движение друг другу. Такие средства также могут включать в себя, например, колесно-ременной узел.
На ФИГ. 192 показана принципиальная схема одного варианта осуществления датчика положения 7100 системы абсолютного позиционирования 7000, содержащего магнитную ротационную систему абсолютного позиционирования, в соответствии с одним вариантом осуществления. В одном варианте осуществления датчик положения 7100 может быть реализован в виде однокристального магнитного ротационного датчика AS5055EQFT производства компании austriamicrosystems, AG. Датчик положения 7100 стыкуется с микроконтроллером 7004, обеспечивая систему абсолютного позиционирования 7000. Датчик положения 7100 представляет собой низковольтный низкомощный компонент, который включает в себя четыре встроенных элемента с эффектом Холла 7128A, 7128B, 7128C, 7128D в области 7130 датчика положения 7100, которая размещена над магнитом 7104 (ФИГ. 186, 187). Также на кристалле предусмотрен АЦП высокого разрешения 7132 и контроллер интеллектуального управления питанием 7138. Для реализации простого и эффективного алгоритма расчета гиперболических и тригонометрических функций, для которых требуются только операции сложения, вычитания, побитового сдвига и табличного поиска, также известного как поразрядный метод или алгоритм Волдера, предусмотрен процессор CORDIC (сокращение от COordinate Rotation DIgital Computer) 7136. Информация об угловом положении, аварийных битах и магнитном поле передается по стандартному интерфейсу SPI 7134 на центральный процессор - микроконтроллер 7004. Датчик положения 7100 обеспечивает разрешение 12 или 14 бит. В варианте осуществления, показанном на ФИГ. 191, датчик положения 7100 представляет собой кристалл AS5055 в небольшом 16-штырьковом пакете QFN размером 4×4×0,85 мм.
Элементы с эффектом Холла 7128A, 7128B, 7128C, 7128D размещены непосредственно над поворачивающимся магнитом. Эффект Холла - это хорошо известный эффект, и для краткости и ясности описания он подробно описан в настоящем документе не будет. По существу эффект Холла представляет собой получение разности потенциалов (напряжение Холла) по электрическому проводнику поперек направления электрического тока в проводнике и в магнитном поле, перпендикулярном направлению тока. Эффект был открыт Эдвином Холлом в 1879 г. Коэффициент Холла определяется как отношение индуцированного электрического поля к произведению плотности тока и приложенному магнитному полю. Это характеристика материала, из которого изготовлен проводник, так как его значение зависит от типа, количества и свойств носителей заряда, которые составляют ток. В датчике положения AS5055 7100 элементы с эффектом Холла 7128A, 7128B, 7128C, 7128D могут создавать сигнал, который указывает на абсолютное положение магнита 7104 (ФИГ. 186, 187) как угла в пределах одного оборота магнита 7104. Значение угла, который представляет собой уникальный сигнал о положении, рассчитанный процессором CORDIC 7136, и сохраняется на датчике положения AS5055 7100 в регистре или памяти. Значение угла, который указывает на положение магнита 7104 за один оборот, передается на главный процессор 7004 различными методиками, например, при включении питания или по запросу главного процессора 7004.
Для работы датчика положения AS5055 7100, подсоединенного к главному микроконтроллеру 7004, необходимо лишь несколько внешних компонентов. Необходимо шесть проводов для простого применения с одним источником питания: два провода питания и четыре провода 7140 для последовательного интерфейса связи SPI 7134 с главным микроконтроллером 7004. Седьмое соединение можно добавить для отправки на главный микроконтроллер 7004 прерывания, информирующего о новом допустимом угле.
При включении питания датчик положения AS5055 7100 выполняет полную последовательность включения питания, включая одно измерение угла. Завершение этого цикла указано как запрос INT на выходной штырь 7142, а значение угла сохраняется во внутреннем регистре. После установки данного выхода датчик положения AS5055 7100 временно переходит в спящий режим. Внешний микроконтроллер 7004 может ответить на запрос INT на 7142 путем считывания значения угла из датчика положения AS5055 7100 через интерфейс SPI 7134. После того как значение угла считывается микроконтроллером 7004, выход INT 7142 снова очищается. Отправка команды «считать угол» через интерфейс SPI 7134 с помощью микроконтроллера 7004 на датчик положения 7100 также автоматически приводит к включению питания кристалла и запуску другого измерения угла. Как только микроконтроллер 7004 завершил считывание значения угла, выход INT 7142 очищается и новый результат сохраняется в регистре угла. Завершение измерения угла снова указывается путем установки выхода INT 7142 и соответствующего флага в регистре статуса.
Вследствие принципа измерения датчика положения AS5055 7100 лишь одно измерение угла выполняется с очень коротким интервалом (~600 мкс) после каждой последовательности включения питания. Как только измерение одного угла завершено, датчик положения AS5055 7100 переходит в состояние отключения питания. Фильтрование значения угла путем цифрового усреднения на кристалле не реализовано, поскольку это может потребовать более одного измерения угла и, следовательно, более длительного включения питания, что нежелательно в сферах применения в маломощных устройствах. Колебания значения угла можно снизить путем усреднения нескольких выборок угла во внешнем микроконтроллере 7004. Например, усреднение по 4 выборкам снижает колебания на 6 дБ (50%).
Как описано выше, двигатель 1102, расположенный внутри рукоятки 1042 системы хирургического инструмента 1000, может использоваться для продвижения и/или оттягивания пусковой системы узла стержня 1200, включая, например, пусковые элементы 1272 и 1280, относительно концевого эффектора 1300 узла стержня 1200 для сшивания скобами и/или рассечения ткани, захваченной внутри концевого эффектора 1300. В различных обстоятельствах может быть желательно продвигать пусковые элементы 1272 и 1280 с желаемой скоростью или в пределах диапазона желаемых скоростей. Аналогичным образом, может быть желательно оттягивать пусковые элементы 1272 и 1280 с желаемой скоростью или в пределах диапазона желаемых скоростей. В различных обстоятельствах, например, микроконтроллер 7004 рукоятки 1042 и/или любой другой подходящий контроллер может быть выполнен с возможностью управлять скоростью пусковых элементов 1272 и 1280. В некоторых обстоятельствах контроллер может быть выполнен с возможностью прогнозировать скорость пусковых элементов 1272 и 1280 на основе различных параметров питания, подаваемого к двигателю 1102, например, такого как напряжение и/или ток, и/или других рабочих параметров двигателя 1102. Контроллер также может быть выполнен с возможностью прогнозировать текущую скорость пусковых элементов 1272 и 1280 на основе предшествующих значений тока и/или напряжения, подаваемых к двигателю 1102, и/или предыдущих состояний системы, таких как скорость, ускорение и/или положение. Более того, контроллер также может быть выполнен с возможностью измерять скорость пусковых элементов 1272 и 1280, используя сенсорную систему абсолютного позиционирования, например, описанную выше. В различных обстоятельствах контроллер может быть выполнен с возможностью сравнивать спрогнозированную скорость пусковых элементов 1272 и 1280 и измеренную скорость пусковых элементов 1272 и 1280 для определения того, нужно ли увеличить подачу питания на двигатель 1102 для увеличения скорости пусковых элементов 1272 и 1280 и/или уменьшить для уменьшения скорости пусковых элементов 1272 и 1280. Заявка на патент США с серийным № 12/235,782, озаглавленная «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ», в настоящее время - патент США № 8,210,411, полностью включена в настоящий документ путем ссылки. Заявка на патент США с серийным № 11/343,803, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ФУНКЦИИ ЗАПИСИ», полностью включена в настоящий документ путем ссылки.
Используя физические свойства инструментов, раскрытых в настоящем документе, как показано на ФИГ. 198 и 199, контроллер, например, такой как микроконтроллер 7004, может быть выполнен с возможностью моделировать ответ действительной системы инструмента в программном обеспечении контроллера. Моделированный ответ сравнивается (с зашумлением и дискретно) с измеренным ответом действительной системы для получения «наблюдаемого» ответа, который применяется для принятия действительных решений по обратной связи. Наблюдаемый ответ - это благоприятное скорректированное значение, которое балансирует сглаженный непрерывный характер моделированного ответа с измеренным ответом, который может обнаруживать внешние воздействия на систему. Как показано на ФИГ. 198 и 199, пусковой элемент или режущий элемент в концевом эффекторе 1300 узла стержня 1200 может перемещаться со скоростью, равной или приблизительно равной целевой скорости, или быстродействием. Системы, раскрытые на ФИГ. 198 и 199, могут использоваться для перемещения режущего элемента с целевой скоростью. Системы могут включать в себя контроллер обратной связи 4200, который может представлять собой один из любых контроллеров обратной связи, включая, без ограничений, например, ПИД-регулятор, обратную связь по состоянию, линейно-квадратичный регулятор (LQR) и/или адаптивный контроллер. Системы дополнительно могут включать в себя источник питания. Источник питания может преобразовывать сигнал от контроллера обратной связи 4200 в физический вход для системы, в данном случае, например, напряжение. Другие примеры включают в себя, без ограничений, например, напряжение с широтно-импульсной модуляцией (ШИМ), частотно-модулированное напряжение, ток, вращающий момент и/или силу.
Как также показано на ФИГ. 198 и 199, физическая система, которая в настоящем документе называется действительной приводной системой инструмента, выполнена с возможностью приводить в действие пусковой элемент или режущий элемент. Один пример представляет собой щеточный двигатель постоянного тока с зубчатой передачей и механическими звеньями с системой шарнира и/или скальпеля. Другим примером является двигатель 1102, раскрытый в настоящем документе, который управляет, например, работой пускового элемента 10060 и шкива шарнира 10030 сменного узла стержня. Внешнее воздействие 4201, показанное на ФИГ. 198 и 199, представляет собой неизмеренное непредсказуемое воздействие, например, таких факторов, как ткань, окружающие объекты и трение физической системы. Такое внешнее воздействие может называться тягой и может быть представлено, например, двигателем 4202, который действует противоположно двигателю 1102. В различных обстоятельствах внешнее воздействие, такое как тяга, является основной причиной отклонения модели физической системы от действительной физической системы. Системы, показанные на ФИГ. 198 и 199 и дополнительно описанные ниже, могут учитывать различия между прогнозируемым поведением пускового элемента или режущего элемента и действительным поведением пускового элемента или режущего элемента.
Как также показано на ФИГ. 198 и 199, указанный на них отдельный датчик измеряет физические параметры действительной физической системы. Один вариант осуществления такого отдельного датчика может включать в себя датчик абсолютного позиционирования 7102 и систему, описанную в настоящем документе. Поскольку выход такого отдельного датчика может представлять собой цифровой сигнал (или может быть соединен с системой получения цифровых данных), выход может иметь конечное разрешение и частоту выборки. Выход отдельного датчика может подаваться на микроконтроллер, например, такой как микроконтроллер 7004. В различных обстоятельствах микроконтроллер может комбинировать моделированный, или оценочный, ответ с измеренным ответом. В некоторых обстоятельствах может быть достаточно применять измеренный ответ, чтобы обеспечить учет внешнего воздействия, не делая наблюдаемый ответ непригодным из-за шума. Примеры алгоритмов, которые делают это, включают в себя, например, средневзвешенное значение и/или теоретическую петлю управления, которая приводит моделированный ответ в направлении измеренного ответа. В конце концов, в дополнение к указанному выше, в модели физической системы для прогнозирования состояний и выходов физической системы по известному входу учитываются, например, такие свойства, как масса, инерционное вязкое трение и/или индукционное сопротивление. На ФИГ. 199 показана дополнительная оценка и измерение тока, подаваемого для работы действительной системы, что является другим параметром, который, например, можно оценить для управления скоростью режущего элемента или пускового элемента узла стержня 1200. Измерение тока в дополнение или вместо измерения напряжения в некоторых обстоятельствах позволяет сделать физическую систему более точной. Тем не менее идеи, раскрытые в настоящем документе, могут быть дополнены измерением других параметров состояния других физических систем.
После описания различных вариантов осуществления системы абсолютного позиционирования 7000 для определения сигнала/значения абсолютного положения от сенсорного элемента, соответствующего уникальному абсолютному положению элементов, связанных с шарнирным поворотом и пуском, описание будет относиться к нескольким методикам использования абсолютного положения/значения в системе обратной связи по положению для управления положением шарнира и скальпеля для компенсации скашивания полотна скальпеля в шарнирном хирургическом инструменте с электропитанием 1010 (ФИГ. 33). Система абсолютного позиционирования 7000 обеспечивает для микроконтроллера уникальный сигнал/значение положения для каждого возможного местонахождения толкающей штанги или скальпеля вдоль длины кассеты со скобами.
Работа шарнирного сочленения 1350 описана в связи с ФИГ. 37, и для краткости и ясности описания в данном разделе подробно повторяться не будет. Работа шарнирного сочленения 10090 описана в связи с ФИГ. 102, и для краткости и ясности описания в данном разделе подробно повторяться не будет. На ФИГ. 193 представлено шарнирное сочленение 8000 в прямом положении, т.е. под нулевым углом θ0 относительно продольного направления, показанного продольной осью L-A, в соответствии с одним вариантом осуществления. На ФИГ. 195 представлено шарнирное сочленение 8000, изображенное на ФИГ. 193, шарнирно повернутое в одном направлении под первым углом θ1, образованным между продольной осью L-A и осью шарнирного поворота A-A, в соответствии с одним вариантом осуществления. На ФИГ. 195 представлено шарнирное сочленение 8000, изображенное на ФИГ. 194, шарнирно повернутое в другом направлении под вторым углом θ2, образованным между продольной осью L-A и осью шарнирного поворота A’-A, в соответствии с одним вариантом осуществления.
В хирургическом инструменте в соответствии с настоящим описанием используется множество гибких полотен скальпеля 8002 для передачи сжимающего усилия на поступательно перемещающийся элемент скальпеля в кассете (не показан) концевого эффектора 1300 (ФИГ. 37). Гибкие полотна скальпеля 8002 позволяют концевому эффектору 1300 (ФИГ. 33) шарнирно поворачиваться под различными углами θ. Однако действие шарнирного поворота приводит к скашиванию гибких полотен скальпеля 8002. Скашивание гибких полотен скальпеля 8002 изменяет эффективную длину рассечения Tl в продольном направлении. Таким образом, сложно определить точное положение скальпеля после шарнирного сочленения 8000, когда гибкие полотна скальпеля 8002 шарнирно повернуты более чем на угол θ=0. Как описано ранее, положение элемента шарнира и скальпеля можно определить непосредственно, используя сигнал/значение обратной связи об абсолютном положении от системы абсолютного позиционирования 7000, когда угол шарнирного поворота равен нулю θ0, как показано на ФИГ. 194. Однако когда гибкие полотна скальпеля 8002 отклоняются от нулевого угла θ0 относительно продольной оси L-A, абсолютное положение скальпеля внутри кассеты невозможно точно определить на основе сигнала/значения абсолютного положения, поступающего от системы абсолютного позиционирования 7000 к микроконтроллеру 7004, не зная угол шарнирного поворота θ.
В одном варианте осуществления угол шарнирного поворота θ можно определить достаточно точно на основе пускового привода хирургического инструмента. Как кратко описано выше, перемещение пускового элемента 10060 можно отслеживать с помощью системы абсолютного позиционирования 7000 в нем, когда привод шарнира функционально соединен с пусковым элементом 10060 с помощью системы сцепления 10070, например, система абсолютного позиционирования 7000 может в результате отслеживать перемещение системы шарнира с помощью пускового элемента 10060. В результате отслеживания перемещения системы шарнира контроллер хирургического инструмента может отследить угол шарнирного поворота θ концевого эффектора, например, такого как концевой эффектор 10020. В результате в различных обстоятельствах угол шарнирного поворота θ можно определить как функцию продольного смещения DL гибких полотен скальпеля 8002. Поскольку продольное смещение DL гибких полотен скальпеля 8002 можно точно определить на основе сигнала/значения абсолютного положения, поступившего от системы абсолютного позиционирования 7000, можно использовать алгоритм компенсации ошибки смещения скальпеля после шарнирного сочленения 8000.
В другом варианте осуществления угол шарнирного поворота θ можно определить путем размещения датчиков на гибких полотнах скальпеля 8002 дистально D относительно шарнирного сочленения 8000. Датчики могут быть выполнены с возможностью измерять величину натяжения или сжатия шарнирно повернутых гибких полотен скальпеля 8002. Измеренные результаты натяжения или сжатия передаются на микроконтроллер 7004 для расчета угла шарнирного поворота θ на основе величины натяжения или сжатия, измеренной в полотнах скальпеля 8002. Подходящие датчики, такие как устройства микроэлектромеханических систем (МЭМС) и датчики деформации, можно легко приспособить к выполнению таких измерений. Другие методики включают в себя размещение в шарнирном сочленении 8000 датчика наклона, уклонометра, акселерометра или любого подходящего устройства для измерения углов для измерения угла шарнирного поворота θ.
Ниже в различных вариантах осуществления описано несколько методик компенсации скашивания гибких полотен скальпеля 8002 в шарнирном поворачиваемом хирургическом инструменте с электропитанием 1010 (ФИГ. 33) в контексте хирургического инструмента с электропитанием 1010, содержащего систему абсолютного позиционирования 7000 и микроконтроллер 7004 с возможностью хранения данных, такой как память 7006.
На ФИГ. 196 представлен один вариант осуществления логической схемы 8100 для способа компенсации влияния скашивания гибких полотен скальпеля 8002 на длину рассечения Tl. Способ будет описан в связи с ФИГ. 185 и 192-196. Соответственно, в одном варианте осуществления способа 8100 компенсации воздействия скашивания гибких полотен скальпеля 8002 на длину рассечения Tl первично характеризуется соотношение между углом шарнирного поворота θ концевого эффектора 1300 (ФИГ. 37) или, например, концевого эффектора 10020 (ФИГ. 102), и эффективной длиной рассечения Tl дистально относительно шарнирного сочленения 8000, и данные характеризации сохраняются в памяти 7006 хирургического инструмента 1010 (ФИГ. 33). В одном варианте осуществления память 7006 представляет собой энергонезависимую память, такую как флеш-память, ЭСППЗУ и т.п. Часть процессора 7008 микроконтроллера 7004 обращается 8102 к данным характеризации, хранящимся в памяти 7006. Процессор 7008 отслеживает 8104 угол шарнирного поворота концевого эффектора 1300 в процессе применения хирургического инструмента 1010. Процессор 7008 корректирует 8106 целевую длину рассечения Tl с помощью хирургического инструмента 1010 на основе известного угла шарнирного поворота θM и сохраненных данных характеризации, которые представляют соотношение между углом шарнирного поворота θS и длиной рассечения Tl.
В различных вариантах осуществления данные характеризации, которые представляют соотношение между углом шарнирного поворота θ концевого эффектора 1300 (ФИГ. 37) и эффективной длиной рассечения Tl, могут быть получены для стержня хирургического инструмента 1010 (ФИГ. 33) в процессе производства. В одном варианте осуществления выходом процесса характеризации 8102 является справочная таблица, встроенная в память 7006. Соответственно, в одном варианте осуществления процессор 7008 обращается к данным характеризации из справочной таблицы, встроенной в память 7006. В одном аспекте справочная таблица содержит массив, заменяющий динамическое вычисление с помощью более простой операции индексирования массива. Экономия времени обработки может быть значительной, поскольку извлечение значения из памяти 7006 процессором 7008 по существу быстрее, чем выполнение «затратной» операции вычисления или ввода/вывода. Справочная таблица может быть предварительно рассчитана и сохранена в статическом программном хранилище, может быть вычислена (или «предварительно выбрана») как часть этапа инициализации программы (сохранения результатов) или даже может сохраняться в аппаратном обеспечении специализированных платформ. В данной сфере применения справочная таблица хранит выходные значения характеризации соотношения между углом шарнирного поворота концевого эффектора 1300 (ФИГ. 37) и эффективной длиной рассечения. В справочной таблице эти выходные значения хранятся в массиве и в некоторых языках программирования могут включать в себя функции указателя (или смещения к меткам) для обработки совпадающего входа. Таким образом, для каждого уникального значения линейного смещения DL имеется соответствующий угол шарнирного поворота θ. Угол шарнирного поворота θ применяется для вычисления соответствующего смещения длины рассечения Tl, например, дистально относительно шарнирного сочленения 8000, шарнирного сочленения 1350 или шарнирного сочленения 10090. Соответствующее смещение длины рассечения Tl хранится в справочной таблице и применяется микроконтроллером 7004 для определения положения скальпеля после шарнирного сочленения. Считается, что другие методики справочной таблицы находятся в рамках объема настоящего описания.
В одном варианте осуществления выход процесса характеризации 8102 представляет собой формулу с наилучшей аппроксимацией кривой, линейной или нелинейной. Соответственно, в одном варианте осуществления процессор 7008 может исполнять машиночитаемые инструкции, реализующие формулу с наилучшей аппроксимацией кривой, на основе данных характеризации. Аппроксимация кривой - это процесс построения кривой или математической функции, наилучшим образом соответствующей серии точек данных с возможными ограничениями. Аппроксимация кривой может включать в себя любую интерполяцию, когда требуется точная аппроксимация данных. В настоящем описании кривая представляет смещение длины рассечения Tl гибких полотен скальпеля 8002 дистально D относительно шарнирно повернутого шарнирного сочленения 8000 (ФИГ. 37) на основе угла шарнирного поворота θ, которое зависит от линейного смещения DL гибких полотен скальпеля 8002 проксимально P относительно шарнирного сочленения 1350. Точки данных, такие как линейное смещение DL гибких полотен скальпеля 8002 проксимально относительно шарнирного сочленения 1350, смещение Tl гибких полотен скальпеля 8002 дистально относительно шарнирно повернутого шарнирного сочленения 1350 и угол шарнирного поворота θ можно измерять и применять для генерации наилучшей аппроксимации в форме многочлена n-го порядка (как правило, многочлен 3-го порядка обеспечивает подходящую аппроксимацию кривой к измеренным данным). Микроконтроллер 7004 можно запрограммировать для реализации многочлена n-го порядка. В процессе применения входной многочлен n-го порядка представляет собой линейное смещение гибких полотен скальпеля 8002, полученное из уникального сигнала/значения абсолютного положения от системы абсолютного позиционирования 7000.
В одном варианте осуществления в процессе характеризации 8102 учитывается угол шарнирного поворота θ и сжимающее усилие полотен скальпеля 8002.
В одном варианте осуществления эффективная длина рассечения представляет собой расстояние между наиболее дистальной поверхностью полотна скальпеля в соотношении с заданной опорной точкой в рукоятке хирургических инструментов 1010.
В различных вариантах осуществления память 7006 для хранения характеризации может представлять собой энергонезависимую память, размещенную на стержне, рукоятке или обеих частях хирургического инструмента 1010 (ФИГ. 33).
В различных вариантах осуществления угол шарнирного поворота θ может отслеживаться датчиком, размещенным на стержне хирургического инструмента 1010 (ФИГ. 33). В других вариантах осуществления угол шарнирного поворота θ может отслеживаться датчиком на рукоятке хирургического инструмента 1010, или угол шарнирного поворота θ может отслеживаться с помощью переменных в управляющем программном обеспечении для хирургического инструмента 1010.
В одном варианте осуществления характеризация используется управляющим программным обеспечением микроконтроллера 7004, который связывается с энергонезависимой памятью 7006, чтобы обратиться к характеризации.
Различные варианты осуществления, описанные в настоящем документе, описаны в контексте скоб, съемно хранящихся внутри кассет для скоб для применения с хирургическими сшивающими инструментами. В некоторых обстоятельствах скобы могут включать в себя проволоки, деформирующиеся при контакте с упором хирургического сшивающего инструмента. Такие проволоки могут быть образованы из металла, например, такого как нержавеющая сталь, и/или из любого другого подходящего материала. Такие варианты осуществления и представленные в настоящем документе идеи могут быть применимы к вариантам осуществления, которые включают в себя крепежные элементы, съемно хранящиеся в кассетах с крепежными элементами для применения с любым подходящим сшивающим хирургическим инструментом.
Различные варианты осуществления, описанные в настоящем документе, описаны в контексте линейных концевых эффекторов и/или кассетах с линейными крепежными элементами. Такие варианты осуществления и представленных в них идеи могут быть применимы к нелинейным концевым эффекторам и/или кассетам с нелинейными крепежными элементами, например, таким как круглые концевые эффекторы и/или концевые эффекторы определенной формы. Например, различные концевые эффекторы, включая нелинейные концевые эффекторы, раскрыты в заявке на патент США с серийным № 13/036,647, поданной 28 февраля 2011 г., озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ», в настоящее время - публикация заявки на патент США № 2011/0226837, которая полностью включена в настоящий документ путем ссылки. Дополнительно заявка на патент США с серийным № 12/893,461, поданная 29 сентября 2012 г., озаглавленная «КАССЕТА СО СКОБАМИ», в настоящее время - публикация заявки на патент США № 2012/0074198, полностью включена в настоящий документ путем ссылки. Заявка на патент США с серийным № 12/031,873, поданная 15 февраля 2008 г., озаглавленная «КОНЦЕВЫЕ ЭФФЕКТОРЫ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СШИВАЮЩЕГО ИНСТРУМЕНТА», в настоящее время - патент США № 7,980,443, также полностью включена в настоящий документ путем ссылки. Патент США № 8,393,514, озаглавленный «ИЗБИРАТЕЛЬНО ОРИЕНТИРУЕМАЯ ИМПЛАНТИРУЕМАЯ КАССЕТА С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ», выпущенный 12 марта 2013 г., также полностью включен в настоящий документ путем ссылки.
Примеры
Хирургический инструмент для обработки ткани может содержать рукоятку, включающую спусковой механизм, стержень, проходящий от рукоятки, концевой эффектор и шарнирное сочленение, причем концевой эффектор поворотно соединен со стержнем с помощью шарнирного сочленения. Хирургический инструмент дополнительно может содержать пусковой элемент, функционально соединенный со спусковым механизмом, причем процесс эксплуатации спускового механизма выполнен с возможностью продвигать пусковой элемент в направлении концевого эффектора, а шарнирный элемент функционально соединен с концевым эффектором. Шарнирный элемент может избирательно зацепляться с пусковым элементом так, что шарнирный элемент функционально зацеплен с пусковым элементом в зацепленной конфигурации, и так, что шарнирный элемент функционально расцеплен с пусковым элементом в расцепленной конфигурации, причем пусковой элемент выполнен с возможностью продвигать шарнирный элемент в направлении концевого эффектора для поворота концевого эффектора вокруг шарнирного сочленения, когда шарнирный элемент и пусковой элемент находятся в зацепленной конфигурации. Хирургический инструмент дополнительно может включать в себя смещающий элемент, например, такой как пружина, которая может быть выполнена с возможностью повторного центрирования концевого эффектора и повторного выравнивания концевого эффектора со стержнем вдоль продольной оси после шарнирного поворота концевого эффектора.
Хирургический инструмент для обработки ткани может содержать электрический двигатель, стержень, концевой эффектор и шарнирное сочленение, причем концевой эффектор поворотно соединен со стержнем с помощью шарнирного сочленения. Хирургический инструмент дополнительно может содержать пусковой привод, который может функционально соединяться с электрическим двигателем, причем пусковой привод выполнен с возможностью продвижения в направлении концевого эффектора и оттягивания от концевого эффектора с помощью электрического двигателя. Хирургический инструмент также может содержать привод шарнира, функционально соединенный с концевым эффектором, причем привод шарнира выполнен с возможностью поворачивать концевой эффектор в первом направлении, когда привод шарнира толкается дистально в направлении концевого эффектора, причем привод шарнира выполнен с возможностью поворачивать концевой эффектор во втором направлении, когда привод шарнира вытягивается проксимально от концевого эффектора, причем пусковой привод может избирательно зацепляться с приводом шарнира и выполнен с возможностью по меньшей мере одного из проталкивания привода шарнира дистально в направлении концевого эффектора и вытягивания привода шарнира от концевого эффектора, когда пусковой привод функционально зацеплен с приводом шарнира, и причем пусковой привод может работать независимо от привода шарнира, когда пусковой привод функционально расцеплен с приводом шарнира.
Хирургический инструмент для обработки ткани может содержать стержень, концевой эффектор, поворотно соединенный со стержнем, и пусковой элемент, выполненный с возможностью перемещения относительно концевого эффектора. Хирургический инструмент дополнительно может содержать шарнирный элемент, функционально соединенный с концевым эффектором, причем шарнирный элемент может избирательно зацепляться с пусковым элементом так, что шарнирный элемент функционально зацеплен с пусковым элементом в зацепленной конфигурации, и так, что шарнирный элемент функционально расцеплен от пускового элемента в расцепленной конфигурации, и причем пусковой элемент выполнен с возможностью перемещать шарнирный элемент относительно концевого эффектора для поворота концевого эффектора, когда шарнирный элемент и пусковой элемент находятся в зацепленной конфигурации. Хирургический инструмент дополнительно может содержать блокировку концевого эффектора, выполненную с возможностью находиться в заблокированной конфигурации и незаблокированной конфигурации, причем блокировка концевого эффектора выполнена с возможностью функционально зацеплять шарнирный элемент с пусковым элементом, когда блокировка концевого эффектора находится в незаблокированной конфигурации.
Хирургический инструмент дополнительно может включать в себя по меньшей мере одну приводную систему, выполненную с возможностью генерировать управляющие движения, которая образует ось активации. Хирургический инструмент дополнительно может содержать по меньшей мере один сменный узел стержня, выполненный с возможностью съемно соединяться по меньшей мере с одной приводной системой в направлении, по существу поперечном оси активации, и передавать управляющие движения от по меньшей мере одной приводной системы на хирургический концевой эффектор, функционально соединенный со сменным узлом стержня. В дополнение к этому хирургический инструмент дополнительно может включать в себя узел блокировки, который стыкуется по меньшей мере с одной приводной системой для предотвращения активации приводной системы до тех пор, пока по меньшей мере один сменный узел стержня не войдет в функциональное соединение по меньшей мере с одной приводной системой.
Хирургический инструмент, который содержит узел стержня, который включает в себя концевой эффектор. Концевой эффектор может содержать хирургическую кассету со скобами и упор, поддерживаемый с возможностью перемещения относительно хирургической кассеты со скобами. Узел стержня дополнительно может содержать выполненный с возможностью перемещения закрывающий узел стержня, выполненный с возможностью прилагать открывающие и закрывающие движения к упору. Рама крепления стержня может функционально поддерживать часть выполненного с возможностью перемещения закрывающего узла стержня на ней. Хирургический инструмент дополнительно может содержать элемент рамы, выполненный с возможностью разъемного функционального зацепления с рамой крепления стержня, и систему закрывающего привода, функционально поддерживаемую элементом рамы и образующую ось активации. Система закрывающего привода может быть выполнена с возможностью функционального зацепления с закрывающим узлом стержня в направлении, по существу поперечном оси активации, когда рама крепления стержня находится в функциональном зацеплении с элементом рамы. Узел блокировки может стыковаться с системой закрывающего привода, предотвращая активацию системы закрывающего привода до тех пор, пока закрывающий узел стержня не войдет в функциональное зацепление с системой закрывающего привода.
Хирургическая система, которая может содержать раму, функционально поддерживающую по меньшей мере одну приводную систему для генерации управляющих движений при активации управляющего исполнительного механизма. По меньшей мере одна из приводных систем образует ось активации. Хирургическая система дополнительно может содержать множество сменных узлов стержня, причем каждый сменный узел стержня может содержать раму крепления стержня, выполненную с возможностью съемно функционально зацепляться за часть рамы в направлении, по существу поперечном оси активации. Первый узел стержня может функционально поддерживаться рамой крепления стержня и может быть выполнен с возможностью функционального зацепления с соответствующей одной из по меньшей мере одной приводной системы в направлении, по существу поперечном оси активации. Узел блокировки может механически зацепляться с частью соответствующей одной из по меньшей мере одной приводной системы и взаимодействовать с управляющим исполнительным механизмом, чтобы предотвратить активацию управляющего исполнительного механизма до тех пор, пока рама крепления стержня не войдет в функциональное зацепление с частью рамы, а первый узел стержня не войдет в функциональное зацепление с одной из по меньшей мере одной приводной системы.
Сменный узел стержня может применяться с хирургическим инструментом. По меньшей мере в одной форме хирургический инструмент включает в себя раму, функционально поддерживающую множество приводных систем и образующую ось активации. В одной форме узел стержня содержит первый стержень, выполненный с возможностью приложения первых активирующих движений к функционально соединенному с ним хирургическому концевому эффектору, причем проксимальный конец первого стержня выполнен с возможностью функционально разъемно соединяться с первой одной из приводных систем, поддерживаемых рамой, в направлении, по существу поперечном оси активации.
Сменный узел стержня может применяться с хирургическим инструментом. По меньшей мере в одной форме хирургический инструмент может включать в себя раму, которая образует ось активации и функционально поддерживает множество приводных систем. Различные формы узла стержня могут содержать раму стержня, которая имеет модуль крепления стержня, прикрепленный к ее проксимальному концу и выполненный с возможностью разъемно соединяться с частью рамы в направлении, по существу поперечном оси активации. Узел стержня дополнительно может содержать концевой эффектор, функционально соединенный с дистальным концом рамы стержня. По меньшей мере в одной форме концевой эффектор содержит хирургическую кассету со скобами и упор, подвижно поддерживаемый относительно хирургической кассеты со скобами. Узел стержня может дополнительно содержать внешний узел стержня, который включает в себя дистальный конец, выполненный с возможностью прилагать управляющие движения к упору. Внешний узел стержня может включать в себя проксимальный конец, выполненный с возможностью функционально разъемно соединяться с первой одной из приводных систем, поддерживаемых рамой, в направлении, по существу поперечном оси активации. Узел стержня также может содержать пусковой узел стержня, который включает в себя дистальную режущую часть, выполненную с возможностью перемещаться между начальным положением и конечным положением внутри концевого эффектора. Пусковой узел стержня может включать в себя проксимальный конец, выполненный с возможностью функционально разъемно соединяться с системой пускового привода, поддерживаемой рамой, в направлении, по существу поперечном оси активации.
Хирургическая система может содержать раму, которая поддерживает множество приводных систем и образует ось активации. Система может дополнительно содержать множество сменных узлов стержня. Каждый сменный узел стержня может содержать удлиненный стержень, выполненный с возможностью приложения первых активирующих движений к функционально соединенному с ним хирургическому концевому эффектору, причем проксимальный конец удлиненного стержня выполнен с возможностью функционально разъемно соединяться с первой одной из приводных систем, поддерживаемых рамой, в направлении, по существу поперечном оси активации. Каждый сменный узел стержня может дополнительно содержать управляющий узел стержня, функционально поддерживаемый внутри удлиненного стержня и выполненный с возможностью прилагать управляющие движения к концевому эффектору, и причем проксимальный конец управляющего узла стержня выполнен с возможностью функционально разъемно соединяться со второй одной из приводных систем, поддерживаемых рамой, в направлении, по существу поперечном оси активации, и причем по меньшей мере один хирургический концевой эффектор отличается от другого одного из хирургических концевых эффекторов.
Обычному специалисту в данной области будет очевидно, что различные конфигурации хирургического инструмента, раскрытые в настоящем документе, включают в себя различные механизмы и структуры для надлежащего выравнивания и надлежащей блокировки и разблокировки сменных узлов стержня к соответствующей(им) части(ям) хирургического инструмента, несмотря на то, что, каким может быть инструмент - портативным инструментом или инструментом с роботизированным управлением. Например, может быть желательно, чтобы инструмент был выполнен с возможностью предотвращать активацию одной или более (включая все) приводных систем в неверное время при подготовке инструмента или при его применении во время хирургической процедуры.
Кожух для применения с хирургическим инструментом, который включает в себя стержень и концевой эффектор, причем хирургический инструмент включает в себя узел шарнира, выполненный с возможностью перемещать концевой эффектор относительно стержня. Кожух содержит двигатель, функционально поддерживаемый кожухом, привод шарнира, выполненный с возможностью передавать по меньшей мере одно шарнирное движение на узел шарнира для перемещения концевого эффектора между положением исходного состояния шарнира и шарнирно повернутым положением, контроллер, находящийся в связи с двигателем, первый вход, выполненный с возможностью передавать на контроллер первый входной сигнал, причем контроллер выполнен с возможностью активировать двигатель, чтобы сгенерировать по меньшей мере одно шарнирное движение для перемещения концевого эффектора в шарнирно повернутое положение в ответ на первый входной сигнал, и вход сброса, выполненный с возможностью передавать на контроллер входной сигнал сброса, причем контроллер выполнен с возможностью активировать двигатель, чтобы сгенерировать по меньшей мере одно движение сброса для перемещения концевого эффектора в положение исходного состояния шарнира в ответ на входной сигнал сброса.
Хирургический инструмент содержит стержень, концевой эффектор, проходящий дистально от стержня, причем концевой эффектор выполнен с возможностью перемещаться относительно стержня между положением исходного состояния шарнира и шарнирно повернутым положением. Концевой эффектор содержит кассету со скобами, включающую множество скоб, а также пусковой элемент, выполненный с возможностью накладывать множество скоб, причем пусковой элемент выполнен с возможностью перемещения между положением исходного состояния пуска и активированным положением. В дополнение к этому хирургический инструмент содержит кожух, проходящий проксимально от стержня. Кожух содержит двигатель, функционально поддерживаемый кожухом, контроллер, находящийся в связи с двигателем, вход исходного состояния, выполненный с возможностью передавать на контроллер входной сигнал исходного состояния, причем контроллер выполнен с возможностью активировать двигатель в ответ на входной сигнал исходного состояния для выполнения возврата концевого эффектора в положение исходного состояния шарнира и возврата пускового элемента в положение исходного состояния пуска.
Хирургический инструмент содержит концевой эффектор, стержень, проходящий проксимально от концевого эффектора, узел шарнира, выполненный с возможностью перемещать концевой эффектор относительно стержня между шарнирно неповернутым положением, первым шарнирно повернутым положением с первой стороны шарнирно неповернутого положения и вторым шарнирно повернутым положением со второй стороны от шарнирно неповернутого положения, причем первая сторона противоположна второй стороне. В дополнение к этому хирургический инструмент дополнительно содержит двигатель, контроллер, находящийся в связи с двигателем, первый вход, выполненный с возможностью передавать на контроллер первый входной сигнал, причем контроллер выполнен с возможностью активировать двигатель, чтобы переместить концевой эффектор в первое шарнирно повернутое положение в ответ на первый входной сигнал, второй вход, выполненный с возможностью передавать на контроллер второй входной сигнал, причем контроллер выполнен с возможностью активировать двигатель, чтобы переместить концевой эффектор во второе шарнирно повернутое положение в ответ на второй входной сигнал, и вход сброса, выполненный с возможностью передавать на контроллер входной сигнал сброса, причем контроллер выполнен с возможностью активировать двигатель, чтобы переместить концевой эффектор в шарнирно неповернутое положение в ответ на входной сигнал сброса.
Хирургический инструмент содержит концевой эффектор, стержень, проходящий проксимально от концевого эффектора, пусковой узел, выполненный с возможностью накладывать множество скоб, узел шарнира, выполненный с возможностью шарнирного поворота концевого эффектора относительно стержня, блокирующий элемент, выполненный с возможностью перемещения между заблокированной конфигурацией и незаблокированной конфигурацией, и кожух, проходящий проксимально от стержня, причем кожух может съемно соединяться со стержнем, когда блокирующий элемент находится в незаблокированной конфигурации. Кожух содержит двигатель, выполненный с возможностью приведения в действие по меньшей мере одного из пускового узла и узла шарнира, и контроллер, находящийся в связи с двигателем, причем контроллер выполнен с возможностью активировать двигатель для сброса по меньшей мере одного из пускового узла и узла шарнира в исходное состояние, когда блокирующий элемент перемещен между заблокированной конфигурацией и незаблокированной конфигурацией.
Хирургический инструмент содержит концевой эффектор, стержень, проходящий проксимально от концевого эффектора, пусковой узел, выполненный с возможностью накладывать множество скоб, узел шарнира, выполненный с возможностью шарнирного поворота концевого эффектора относительно стержня, блокирующий элемент, выполненный с возможностью перемещения между заблокированной конфигурацией и незаблокированной конфигурацией, и кожух, проходящий проксимально от стержня, причем кожух может съемно соединяться со стержнем, когда блокирующий элемент находится в незаблокированной конфигурации. Кожух содержит двигатель, выполненный с возможностью приводить в действие по меньшей мере один из пускового узла и узла шарнира, контроллер, находящийся в связи с двигателем, и вход исходного состояния, функционально соединенный с блокирующим элементом, причем вход исходного состояния выполнен с возможностью передавать входной сигнал исходного состояния на контроллер, и причем контроллер выполнен с возможностью активировать двигатель для сброса по меньшей мере одного из пускового узла и узла шарнира в исходное состояние в ответ на входной сигнал исходного состояния.
Хирургический инструмент содержит концевой эффектор, стержень, проходящий проксимально от концевого эффектора, узел шарнира, выполненный с возможностью шарнирного поворота концевого эффектора относительно стержня между положением исходного состояния и шарнирно повернутым положением, блокирующий элемент, выполненный с возможностью перемещения между заблокированной конфигурацией и незаблокированной конфигурацией, и кожух, проходящий проксимально от стержня, причем кожух может разъемно соединяться со стержнем, когда блокирующий элемент находится в незаблокированной конфигурации. Кожух содержит двигатель, выполненный с возможностью приводить в действие узел шарнира, и контроллер, находящийся в связи с двигателем, причем контроллер выполнен с возможностью активировать двигатель для выполнения возврата концевого эффектора в положение исходного состояния, когда блокирующий элемент перемещен между заблокированной конфигурацией и незаблокированной конфигурацией.
Сенсорная система абсолютного позиционирования для хирургического инструмента может содержать, во-первых, сенсорный элемент, функционально соединенный с выполненным с возможностью перемещения приводным элементом хирургического инструмента, и, во-вторых, датчик положения, функционально соединенный с сенсорным элементом, причем датчик положения выполнен с возможностью измерять абсолютное положение сенсорного элемента.
Хирургический инструмент может содержать, во-первых, сенсорную систему абсолютного позиционирования, содержащую сенсорный элемент, функционально соединенный с выполненным с возможностью перемещения приводным элементом хирургического инструмента, и датчик положения, функционально соединенный с сенсорным элементом, причем датчик положения выполнен с возможностью измерять абсолютное положение сенсорного элемента и, во-вторых, двигатель, функционально соединенный с выполненным с возможностью перемещения приводным элементом.
Сенсорная система абсолютного положения для хирургического инструмента может содержать, во-первых, сенсорный элемент, функционально соединенный с выполненным с возможностью перемещения приводным элементом хирургического инструмента, во-вторых, держатель для удерживания сенсорного элемента, причем держатель и сенсорный элемент поворотно соединены, и, в-третьих, датчик положения, функционально соединенный с сенсорным элементом, причем датчик положения выполнен с возможностью измерять абсолютное положение сенсорного элемента, причем датчик положения фиксирован относительно поворота держателя и сенсорного элемента.
Способ компенсации воздействия скашивания гибких полотен скальпеля на длину рассечения хирургическим инструментом, содержащим процессор и память, причем хирургический инструмент содержит сохраненные в памяти данные характеризации, представляющие соотношение между углом шарнирного поворота концевого эффектора и эффективной длиной рассечения дистально относительно шарнирного сочленения, содержащий этапы, во-первых, обращения процессора к данным характеризации из памяти хирургического инструмента, во-вторых, отслеживания процессором угла шарнирного поворота концевого эффектора в процессе применения хирургического инструмента и, в-третьих, регулирования процессором целевой длины рассечения хирургическим инструментом на основе отслеженного угла шарнирного поворота и сохраненных данных характеризации.
Хирургический инструмент может содержать микроконтроллер, содержащий процессор, выполненный с возможностью исполнять машиночитаемые инструкции, и память, соединенную с микроконтроллером, причем процессор может работать с целью, во-первых, обращения к данным характеризации из памяти, представляющим соотношение между углом шарнирного поворота концевого эффектора и эффективной длиной рассечения дистально относительно шарнирного сочленения, во-вторых, отслеживания угла шарнирного поворота концевого эффектора в процессе применения хирургического инструмента и, в-третьих, регулирования целевой длины рассечения на основе отслеженного угла шарнирного поворота и сохраненных данных характеризации.
Хирургический инструмент может содержать концевой эффектор, содержащий шарнирное сочленение, гибкие полотна скальпеля, выполненные с возможностью поступательного перемещения из положения, проксимального относительно шарнирного сочленения, в положение, дистальное относительно шарнирного сочленения, микроконтроллер, содержащий процессор, который может исполнять машиночитаемые инструкции, и память, соединенную с микроконтроллером. Процессор может работать с возможностью, во-первых, обращения к данным характеризации из памяти, представляющим соотношение между углом шарнирного поворота концевого эффектора и эффективной длиной рассечения дистально относительно шарнирного сочленения, во-вторых, отслеживания угла шарнирного поворота концевого эффектора в процессе применения хирургического инструмента и, в-третьих, регулирования целевой длины рассечения на основе известного угла шарнирного поворота и сохраненных данных характеризации.
Узел стержня для применения с хирургическим инструментом может содержать стержень, концевой эффектор, шарнирное сочленение, соединяющее концевой эффектор со стержнем, пусковой шкив, выполненный с возможностью перемещения относительно концевого эффектора, шкив шарнира, выполненный с возможностью шарнирного поворота концевого эффектора вокруг шарнирного сочленения, и кольцо сцепления, выполненное с возможностью избирательного зацепления шкива шарнира с пусковым шкивом для передачи перемещения пускового шкива на шкив шарнира.
Хирургический инструмент может содержать рукоятку, электрический двигатель, расположенный в рукоятке, стержень, прикрепляемый к рукоятке, концевой эффектор, шарнирное сочленение, соединяющее концевой эффектор со стержнем, пусковой шкив, выполненный с возможностью перемещения в направлении концевого эффектора, причем электрический двигатель выполнен с возможностью передавать пусковое движение на пусковой шкив, шкив шарнира, выполненный с возможностью шарнирного поворота концевого эффектора вокруг шарнирного сочленения, и поворачиваемое сцепление, выполненное с возможностью избирательно зацеплять шкив шарнира с пусковым шкивом для передачи пускового движения на шкив шарнира.
Узел стержня для применения с хирургическим инструментом может содержать стержень, концевой эффектор, шарнирное сочленение, соединяющее концевой эффектор со стержнем, пусковой шкив, выполненный с возможностью перемещения относительно концевого эффектора, шкив шарнира, выполненный с возможностью шарнирного поворота концевого эффектора вокруг шарнирного сочленения, и продольное сцепление, выполненное с возможностью избирательно зацеплять шкив шарнира с пусковым шкивом для передачи перемещения пускового шкива на шкив шарнира.
Узел стержня, прикрепляемый к рукоятке хирургического инструмента, причем узел стержня содержит стержень, содержащий часть разъема, выполненную с возможностью функционально соединять стержень с рукояткой, концевой эффектор, шарнирное сочленение, соединяющее концевой эффектор со стержнем, пусковой шкив, выполненный с возможностью перемещения относительно концевого эффектора, когда к пусковому шкиву прилагают пусковое движение, шкив шарнира, выполненный с возможностью шарнирного поворота концевого эффектора вокруг шарнирного сочленения, когда к шкиву шарнира прилагают шарнирное движение, и блокировку шарнира, выполненную с возможностью разъемно удерживать шкив шарнира в положении, причем шарнирное движение выполнено с возможностью разблокирования блокировки шарнира.
Узел стержня, прикрепляемый к рукоятке хирургического инструмента, причем узел стержня содержит стержень, включающий, во-первых, часть разъема, выполненную с возможностью функционально соединять стержень с рукояткой, и, во-вторых, проксимальный конец, концевой эффектор, содержащий дистальный конец, шарнирное сочленение, соединяющее концевой эффектор со стержнем, пусковой шкив, выполненный с возможностью перемещения относительно концевого эффектора с помощью пускового движения, шкив шарнира, выполненный с возможностью шарнирного поворота концевого эффектора вокруг шарнирного сочленения, когда к шкиву шарнира прилагают шарнирное движение, и блокировку шарнира, содержащую, во-первых, первую одностороннюю блокировку, выполненную с возможностью разъемно сопротивляться проксимальному перемещению шкива шарнира, и, во-вторых, вторую одностороннюю блокировку, выполненную с возможностью разъемно сопротивляться дистальному перемещению шкива шарнира.
Узел стержня, прикрепляемый к рукоятке хирургического инструмента, содержащего стержень, включающий, во-первых, часть разъема, выполненную с возможностью функционально соединять стержень с рукояткой, и, во-вторых, проксимальный конец, концевой эффектор, содержащий дистальный конец, шарнирное сочленение, соединяющее концевой эффектор со стержнем, пусковой шкив, выполненный с возможностью перемещения относительно концевого эффектора с помощью пускового движения, систему шкива шарнира, содержащую, во-первых, проксимальный шкив шарнира и, во-вторых, дистальный шкив шарнира, функционально зацепленный с концевым эффектором, и блокировку шарнира, выполненную с возможностью разъемно удерживать дистальный шкив шарнира в положении, причем перемещение проксимального шкива шарнира выполнено с возможностью разблокирования блокировки шарнира и приведения в действие дистального шкива шарнира.
Узел стержня, прикрепляемый к рукоятке хирургического инструмента, содержащего стержень, включающий, во-первых, часть разъема, выполненную с возможностью функционально соединять стержень с рукояткой, и, во-вторых, проксимальный конец, концевой эффектор, содержащий дистальный конец, шарнирное сочленение, соединяющее концевой эффектор со стержнем, пусковой шкив, выполненный с возможностью перемещения относительно концевого эффектора с помощью пускового движения, и систему шкива шарнира, содержащую, во-первых, первый шкив шарнира и, во-вторых, второй шкив шарнира, функционально зацепленный с концевым эффектором, и блокировку шарнира, выполненную с возможностью разъемно удерживать второй шкив шарнира в положении, причем первичное перемещение первого шкива шарнира выполнено с возможностью разблокирования второго шкива шарнира, а последующее перемещение первого шкива шарнира выполнено с возможностью приводить в действие второй шкив шарнира.
Хирургический сшивающий инструмент может содержать рукоятку, пусковой элемент и электрический двигатель. Электрический двигатель может продвигать пусковой элемент во время первого рабочего состояния, оттягивать пусковой элемент во время второго рабочего состояния и передавать обратную связь на рукоятку во время третьего рабочего состояния. Более того, электрический двигатель может содержать стержень и резонатор, смонтированный на стержне. Резонатор может содержать корпус, который может содержать монтажное отверстие. Монтажное отверстие и стержень могут быть коаксиальны центральной оси резонатора, а центр массы резонатора может быть расположен вдоль центральной оси. Резонатор также может содержать пружину, проходящую от корпуса, вес, проходящий от пружины, и противовес, проходящий от корпуса.
Хирургический инструмент для разрезания и сшивания скобами ткани может содержать рукоятку, пусковой элемент, проходящий от рукоятки, электрический двигатель, расположенный в рукоятке, и усилитель, содержащий центр массы. Электрический двигатель может быть выполнен с возможностью работы во множестве состояний и может содержать стержень двигателя. Более того, усилитель может быть примонтирован к стержню двигателя в центре массы. Усилитель может поворачиваться в первом направлении, когда электрический двигатель находится в пусковом состоянии, и усилитель может колебаться между первым направлением и вторым направлением, когда электрический двигатель находится в состоянии обратной связи.
Хирургический инструмент для разрезания и сшивания скобами ткани может содержать средства удержания для удержания хирургического инструмента, пусковой элемент и средства двигателя для работы во множестве рабочих состояний. Множество рабочих состояний может содержать пусковое состояние и состояние обратной связи. Средства двигателя могут поворачиваться в первом направлении во время пускового состояния и могут колебаться между первым направлением и вторым направлением во время состояния обратной связи. Хирургический инструмент может дополнительно содержать средства генерации обратной связи для генерации гаптической обратной связи. Средства генерации обратной связи могут быть примонтированы к средствам двигателя.
Хирургический инструмент для разрезания и сшивания скобами ткани может содержать рукоятку, пусковой элемент, проходящий от рукоятки, и электрический двигатель, расположенный в рукоятке. Электрический двигатель может быть выполнен с возможностью работы во множестве состояний, и электрический двигатель может содержать стержень двигателя. Хирургический инструмент может дополнительно содержать резонатор, содержащий центр массы. Резонатор может быть примонтирован к стержню двигателя в центре массы. Более того, резонатор может быть сбалансирован, когда электрический двигатель находится в продвигающем состоянии, и резонатор может быть несбалансирован, когда электрический двигатель находится в состоянии обратной связи.
Способ работы хирургического сшивающего инструмента может содержать инициирование первичного рабочего состояния. Режущий элемент во время первичного рабочего состояния может приводиться в действие дистально. Способ также может содержать обнаружение порогового состояния режущего элемента, передачу информации о пороговом состоянии оператору хирургического сшивающего инструмента и получение одного из множества входов от оператора. Множество входов может содержать первый вход и второй вход. Способ также может содержать инициирование вторичного рабочего состояния в ответ на вход от оператора. Режущий элемент может приводиться в действие дистально в ответ на первый вход и может оттягиваться проксимально в ответ на второй вход.
Способ работы хирургического инструмента может содержать инициирование первичной хирургической функции, обнаружение клинически важного состояния, передачу информации о клинически важном состоянии оператору хирургического инструмента, прием входа от оператора и выполнение вторичной хирургической функции на основе входа от оператора. Вторичная хирургическая функция может содержать одно из продолжения первичной хирургической функции или инициации модифицированной хирургической функции.
Система для управления хирургическим инструментом может содержать двигатель, и двигатель может приводить в действие пусковой элемент во время пускового такта. Система также может содержать контроллер для управления двигателем, и контроллер может быть выполнен с возможностью работы во множестве рабочих состояний во время пускового такта. Множество рабочих состояний может содержать продвигающее состояние и оттягивающее состояние. Система также может содержать датчик, выполненный с возможностью обнаруживать усилие на пусковом элементе, причем датчик и контроллер могут находиться в связи для передачи сигнала. Контроллер может приостанавливать пусковой такт, когда датчик обнаруживает усилие на пусковом элементе, которое превышает пороговое усилие. Система также может содержать множество клавиш ввода, причем клавиши ввода и контроллер могут находиться в связи для передачи сигнала. Контроллер может возобновить работу в продвигающем состоянии при активации первой клавиши ввода, и контроллер может инициировать оттягивающее состояние при активации второй клавиши ввода.
Хирургический инструмент может содержать пусковой элемент, двигатель, выполненный с возможностью приведения в действие пускового элемента, и контроллер для управления двигателем. Контроллер может быть выполнен с возможностью работы хирургического инструмента во множестве рабочих состояний, и множество рабочих состояний может содержать пусковое состояние для приведения в действие пускового элемента и предупреждающее пусковое состояние для приведения в действие пускового элемента. Хирургический инструмент также может содержать средства для работы хирургического инструмента в предупреждающем пусковом состоянии.
Хирургический инструмент может содержать рукоятку, стержень, проходящий от рукоятки, концевой эффектор и шарнирное сочленение, соединяющее концевой эффектор со стержнем. Хирургический инструмент может дополнительно содержать пусковой шкив, выполненный с возможностью перемещения относительно концевого эффектора, когда к пусковому шкиву прилагают пусковое движение, шкив шарнира, выполненный с возможностью шарнирного поворота концевого эффектора вокруг шарнирного сочленения, когда к шкиву шарнира прилагают шарнирное движение, и блокировку шарнира, выполненную с возможностью разъемно удерживать пусковой шкив в положении, причем шарнирное движение выполнено с возможностью разблокирования блокировки шарнира.
Хирургический инструмент может содержать по меньшей мере одну приводную систему, выполненную с возможностью генерировать управляющие движения при ее активации и образующую ось активации, по меньшей мере один сменный узел стержня, выполненный с возможностью съемно соединяться по меньшей мере с одной приводной системой в направлении, по существу поперечном оси активации, и передающий управляющие движения от по меньшей мере одной приводной системы на хирургический концевой эффектор, функционально соединенный с указанным сменным узлом стержня, и узел блокировки, содержащий средства стыковки для стыковки по меньшей мере с одной приводной системой, а также для предотвращения активации приводной системы до тех пор, пока по меньшей мере один сменный узел стержня не будет функционально соединен по меньшей мере с одной приводной системой.
Хирургический инструмент, включающий узел стержня, может содержать концевой эффектор, содержащий хирургическую кассету со скобами и упор, причем одно из упора и/или хирургической кассеты со скобами выполнен с возможностью перемещения относительно другого из упора и/или хирургической кассеты со скобами при приложении открывающего движения и закрывающего движения. Хирургический инструмент может дополнительно содержать выполненный с возможностью перемещения закрывающий узел стержня, выполненный с возможностью приложения открывающего движения и закрывающего движения, раму крепления стержня, функционально поддерживающую часть выполненного с возможностью перемещения закрывающего узла стержня на нем, элемент рамы, выполненный с возможностью разъемного функционального зацепления с рамой крепления стержня, систему закрывающего привода, функционально поддерживаемую элементом рамы и образующую ось активации, причем система закрывающего привода выполнена с возможностью функционального зацепления с закрывающим узлом стержня в направлении, по существу поперечном оси активации, когда рама крепления стержня находится в функциональном зацеплении с пусковым элементом, а также узел блокировки, стыкующийся с системой закрывающего привода для предотвращения активации системы закрывающего привода до тех пор, пока закрывающий узел стержня не войдет в функциональное зацепление с системой закрывающего привода.
Хирургический инструмент может содержать концевой эффектор, стержень, проходящий проксимально от концевого эффектора, и узел шарнира, выполненный с возможностью перемещения концевого эффектора относительно стержня между шарнирно неповернутым положением, первым диапазоном шарнирно повернутых положений с первой стороны шарнирно неповернутого положения и вторым диапазоном шарнирно повернутых положений со второй стороны шарнирно неповернутого положения, причем первая сторона противоположна второй стороне. Хирургический инструмент может дополнительно содержать двигатель, контроллер, находящийся в связи с двигателем, первый вход, выполненный с возможностью передачи на контроллер первого входного сигнала, причем контроллер выполнен с возможностью активировать двигатель так, чтобы переместить концевой эффектор в шарнирно повернутое положение в пределах первого диапазона шарнирно повернутых положений в ответ на первый входной сигнал, второго входа, выполненного с возможностью передавать второй входной сигнал на контроллер, причем контроллер выполнен с возможностью активировать двигатель так, чтобы переместить концевой эффектор в шарнирно повернутое положение в пределах второго диапазона шарнирно повернутых положений в ответ на второй входной сигнал, а также входа сброса, выполненного с возможностью передачи входного сигнала сброса на контроллер, причем контроллер выполнен с возможностью активировать двигатель для перемещения концевого эффектора в шарнирно неповернутое положение в ответ на входной сигнал сброса.
Хотя различные подробности были описаны в приведенном выше описании, на практике возможны различные варианты осуществления, не содержащие этих конкретных подробностей. Например, для краткости и ясности выбранные аспекты показаны в форме блок-схемы, а не подробного описания. Некоторые части подробных описаний, представленных в настоящем документе, могут быть представлены в виде инструкций, которые работают с данными, хранящимися в компьютерной памяти. Такие описания и представления применяются специалистами в данной области для описания и доведения сути их работы до других специалистов в данной области. Как правило, алгоритмом называют логическую последовательность этапов, приводящих к получению желаемого результата, где «этап» относится к манипулированию физическими величинами, которые могут, хотя и не обязательно, принимать форму электрических или магнитных сигналов, которые можно сохранять, передавать, комбинировать, сравнивать и которыми можно иным образом манипулировать. В распространенной практике эти сигналы называют битами, значениями, элементами, символами, знаками, терминами, числами и т.п. Эти и аналогичные термины могут быть связаны с соответствующими физическими величинами, и они являются лишь удобными метками, применяемыми в отношении этих физических величин.
Если иное конкретно не указано, как очевидно из приведенного выше описания, следует понимать, что на протяжении приведенного выше описания использование таких терминов, как «обработка», или «вычисление», или «расчет», или «определение», или «отображение» и т.п., относится к действию или процессам компьютерной системы или аналогичного электронного вычислительного устройства, которое манипулирует и преобразует данные, представленные в виде физических (электронных) величин в регистрах и памяти компьютерной системы, в другие данные, аналогичным образом представленные в виде физических величин в памяти или регистрах компьютерной системы или другом таком устройстве хранения, передачи или отображения информации.
В общем смысле специалистам в данной области будет понятно, что различные аспекты, описанные в настоящем документе, которые могут быть реализованы по отдельности и/или в совокупности широким диапазоном аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или любой их комбинации, могут рассматриваться как состоящие из различных типов «электронных схем». Следовательно, при применении в настоящем документе термин «электрическая схема» включает в себя, без ограничений, электрическую схему, имеющую по меньшей мере одну отдельную электрическую схему, электрическую схему, имеющую по меньшей мере одну интегральную схему, электрическую схему, имеющую по меньшей мере одну специализированную интегральную схему, электрическую схему, образующую компьютерное устройство общего назначения, конфигурируемое компьютерной программой (например, компьютерное устройство общего назначения, конфигурируемое компьютерной программой, которое по меньшей мере частично проводит описанные в настоящем документе процессы и/или устройства, или микропроцессор, конфигурируемый компьютерной программой, который по меньшей мере частично проводит описанные в настоящем документе процессы и/или устройства), электрическую схему, образующую устройство памяти (например, формы оперативного запоминающего устройства), и/или электрическую схему, образующую устройство связи (например, модем, переключатель линии связи и/или оптоэлектронное оборудование). Специалистам в данной области будет понятно, что описанный в настоящем документе объект изобретения может быть реализован аналоговым или цифровым способом или в виде их некоторой комбинации.
В приведенном выше подробном описании установлены различные варианты осуществления устройств и/или процессов с применением блок-схем, структурных схем и/или примеров. Поскольку такие блок-схемы, структурные схемы и/или примеры содержат одну или более функций и/или операций, специалистам в данной области будет понятно, что каждая функция и/или операция внутри таких блок-схем, структурных схем или примеров может быть реализована по отдельности и/или в совокупности широким диапазоном аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или практически любой их комбинации. В одном варианте осуществления несколько частей объекта изобретения, описанного в настоящем документе, могут быть реализованы с помощью специализированных интегральных схем (СИС), программируемых пользователем вентильных матриц (ППВМ), процессоров для обработки цифровых сигналов (DSP) или других встроенных форматов. Однако специалистам в данной области будет понятно, что некоторые аспекты раскрытых в настоящем документе вариантов осуществления полностью или частично могут быть эквивалентно реализованы во встроенных схемах в виде одной или более компьютерных программ, работающих на одном или более компьютерах (например, в виде одной или более программ, работающих на одной или более компьютерных системах), в виде одной или более компьютерных программ, работающих на одном или более процессорах (например, в виде одной или более программ, работающих на одном или более микропроцессорах), в виде встроенного программного обеспечения или практически в виде любой их комбинации, а разработка схемы и/или написание кода для программного обеспечения и/или встроенного программного обеспечения в свете настоящего описания будет соответствовать навыкам специалиста в данной области. В дополнение к этому специалистам в данной области будет очевидно, что механизмы описанного в настоящем документе объекта изобретения могут распространяться в виде программного продукта в различных формах и, что описанный в настоящем документе иллюстративный вариант осуществления объекта изобретения, описанный в настоящем документе, применяется независимо от конкретного типа среды, являющейся носителем сигнала, применяемой для действительного осуществления распространения. Примеры среды, являющейся носителем сигнала, включают в себя, без ограничений, следующие: записываемые типы носителей, такие как гибкий диск, накопитель на жестком магнитном диске, компакт-диск (CD), цифровой видеодиск (DVD), цифровая лента, компьютерная память и т.п.; и среда типа среды передачи сигнала, такая как цифровая и/или аналоговая среда связи (например, волоконно-оптический кабель, волновод, проводное коммуникационное соединение, беспроводное коммуникационное соединение (например, передатчик, приемник, передающая логическая схема, принимающая логическая схема и т.п.) и т.п.).
Специалисту в данной области будет понятно, что описанные в настоящем документе компоненты (например, операции), устройства, объекты и сопровождающее их описание применяются в качестве примеров ради обеспечения концептуальной ясности и, что предполагаются различные модификации конфигурации. Следовательно, при применении в настоящем документе конкретные приведенные примеры и сопроводительное описание считаются представителями их более общих классов. Как правило, применение любого конкретного примера считается представляющим его класс, а неисключение конкретных компонентов (например, операций), устройств и объектов не следует считать ограничивающими.
В отношении применения по существу любых случаев множественного и/или единственного числа для терминов в настоящем документе специалисты в данной области могут изменять множественное на единственное и/или единственное на множественное в соответствии с требованиями контекста и/или сферой применения. Различные комбинации единственного/множественного числа для ясности в настоящем документе явным образом не указаны.
Описанный в настоящем документе объект изобретения иногда иллюстрирует различные компоненты, содержащиеся внутри или соединенные с различными другими компонентами. Следует понимать, что такие показанные архитектуры являются лишь примерами и, что фактически могут быть реализованы многие другие архитектуры с такой же функциональностью. В концептуальном смысле любая конфигурация компонентов для достижения такой же функциональности эффективно «связана» так, чтобы желаемая функциональность была достигнута. Таким образом, любые два компонента, скомбинированные в настоящем документе для достижения конкретной функциональности, могут рассматриваться как «связанные» друг с другом так, чтобы достигалась желаемая функциональность, независимо от архитектур или промежуточных компонентов. Аналогичным образом любые два компонента, соединенные таким образом, можно рассматривать как «функционально соединенные» или «функционально связанные» друг с другом для достижения желаемой функциональности, а любые два компонента, которые могут быть связаны таким образом, также могут рассматриваться как «функционально соединяемые» друг с другом для достижения желаемой функциональности. Конкретные примеры функционально соединяемых компонентов включают в себя, без ограничений, физически сопрягаемые, и/или физически взаимодействующие компоненты, и/или беспроводно взаимодействующие, и/или логически взаимодействующие, и/или логически взаимодействующие компоненты.
В некоторых случаях один или более компонентов могут называться в настоящем документе как «выполненные с возможностью», «которые могут быть выполнены с возможностью», «функциональные/способные к», «приспособленные/которые могут быть приспособлены для», «способные к», «соответствующие/которые могут соответствовать» и т.п. Специалистам в данной области будет понятно, что термин «выполненный с возможностью» может по существу охватывать компоненты в активном состоянии, и/или компоненты в неактивном состоянии, и/или компоненты в состоянии ожидания, если контекст не требует иного.
В отношении приложенных пунктов формулы изобретения специалистам в данной области будет понятно, что перечисленные в них операции могут по существу выполняться в любом порядке. Также, хотя различные операционные потоки представлены в виде последовательности(ей), следует понимать, что различные операции могут выполняться в других порядках, отличных от показанного, или же могут выполняться одновременно. Примеры таких альтернативных порядков могут включать в себя перекрывающийся, перемежающийся, прерываемый, перестраиваемый, инкрементный, предварительный, дополнительный, одновременный, обратный или другие варианты порядка, если контекст не требует иного. Более того, предполагается, что такие термины, как «чувствительный к», «связанный с» или другие прилагательные прошедшего времени по существу не должны исключать таких вариантов, если контекст не требует иного.
Хотя в настоящем документе описаны различные варианты осуществления, специалистам в данной области может быть очевидна возможность множества модификаций, вариантов, замен, изменений и эквивалентов для этих вариантов осуществления. Также для некоторых компонентов, для которых раскрыты материалы, могут применяться другие материалы. Таким образом, следует понимать, что представленное выше описание и приложенные пункты формулы изобретения должны охватывать все такие модификации и варианты как попадающие в рамки объема раскрытых вариантов осуществления. Предполагается, что следующие пункты формулы изобретения охватывают все такие модификации и варианты.
Описание публикации заявки на патент США № 2010/0264194, озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ШАРНИРНО ПОВОРАЧИВАЕМЫМ КОНЦЕВЫМ ЭФФЕКТОРОМ», поданной 22 апреля 2010 г., полностью включено в настоящий документ путем ссылки. Описание заявки на патент США с серийным № 13/524,049, озаглавленной «ШАРНИРНО ПОВОРАЧИВАЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД», поданной 15 июня 2012 г., полностью включено в настоящий документ путем ссылки.
Устройства, раскрытые в настоящем документе, могут быть выполнены с возможностью утилизации после однократного применения, или они могут быть выполнены с возможностью применения множество раз. Однако в любом случае после по меньшей мере одного применения устройство можно применять повторно после восстановления. Восстановление может включать в себя любую комбинацию этапов разборки устройства, после которого выполняется очистка или замена конкретных элементов с последующей повторной сборкой. В частности, можно разобрать устройство и избирательно заменить или удалить в любой комбинации любой ряд конкретных элементов или частей. После очистки и/или замены конкретных элементов устройство можно повторно собрать для последующего применения либо в центрах по восстановлению, либо хирургической командой непосредственно перед хирургической процедурой. Специалистам в данной области будет очевидно, что при восстановлении устройства можно использовать различные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в рамки объема настоящей заявки.
Предпочтительно, чтобы изобретение, описанное в настоящем документе, было обработано до хирургической операции. Прежде всего новый или использованный инструмент получают и при необходимости очищают. Затем его можно стерилизовать. В одной методике стерилизации инструмент помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет из материала Тайвек (TYVEK). Затем контейнер и инструмент помещают в поле излучения, которое может проникать в контейнер, такое как гамма-излучение, рентгеновские лучи или электроны высокой энергии. Излучение убивает бактерии на инструменте и в контейнере. Затем стерилизованный инструмент можно хранить в стерильном контейнере. Герметичный контейнер сохраняет инструмент в стерильном состоянии до его открытия в медицинском учреждении.
Любой патент, публикация или другой материал описания, который полностью или частично включен в настоящий документ путем ссылки, являются неотъемлемой частью данного документа в той степени, в которой они не противоречат существующим определениям, утверждениям или другим материалам описания, представленным в настоящем описании. Таким образом, описание, в прямой форме представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей материалу, включенному в настоящий документ путем ссылки. Любой материал или его часть, указанная как включенная в настоящий документ путем ссылки, но противоречащая существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включена в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
В целом использование описанных в настоящем документе принципов настоящего изобретения обеспечивает получение множества преимуществ. Представленное выше описание одного или более вариантов осуществления было представлено для целей иллюстрации и описания. Считается, что описание не является исчерпывающим или ограничивающим точной раскрытой формой. В свете вышеуказанных идей возможны модификации или варианты. Один или более вариантов осуществления были выбраны и описаны для иллюстрации принципов и способов практической реализации, посредством чего позволяя специалисту в данной области использовать различные варианты осуществления изобретения, а также с различными модификациями, соответствующими конкретной предполагаемой сфере применения. Предполагается, что полный объем определен в приложенных пунктах формулы изобретения.
Реферат
Изобретение относится к медицине и может быть использовано для наложения хирургического скобочного шва. Хирургический инструмент содержит концевой эффектор, узел шарнира, стержень и кожух, который проходит проксимально от стержня. Узел шарнира выполнен с возможностью шарнирного поворота концевого эффектора относительно стержня, пусковой узел обеспечивает наложение множества скоб, а блокирующий элемент выполнен с возможностью перемещения между заблокированной конфигурацией и незаблокированной конфигурацией. Кожух съемно соединен со стержнем, когда блокирующий элемент находится в незаблокированной конфигурации. Двигатель в кожухе выполнен с возможностью приведения в действие по меньшей мере одного из пускового узла и узла шарнира. Контроллер связан с двигателем и выполнен с возможностью активировать двигатель для сброса по меньшей мере одного пускового узла и узла шарнира в исходное состояние, когда блокирующий элемент перемещен между заблокированной конфигурацией и незаблокированной конфигурацией. 7 з.п. ф-лы, 199 ил.
Формула
Документы, цитированные в отчёте о поиске
Электронные блокировки и хирургический сшивающий аппарат, содержащий электронные блокировки
Хирургический сшивающий скобками аппарат, содержащий однократный механизм блокировки, приводимый в действие электроактивным полимером, для предотвращения срабатывания
Хирургический сшивающий аппарат многократного использования (варианты) и способ его обработки (варианты)
Комментарии