Системы хирургических инструментов, содержащие концевой эффектор, выполненный с возможностью шарнирного поворота, и средства для регулирования пускового хода пускового элемента - RU2703687C2
Код документа: RU2703687C2
Чертежи





























Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к хирургическим инструментам и в различных вариантах осуществления к хирургическим сшивающим и режущим инструментам и предназначенным для применения с ними кассетам со скобами.
Сшивающий инструмент может включать в себя две взаимодействующие удлиненные бранши, каждая из которых может быть выполнена с возможностью введения в тело пациента и расположения относительно сшиваемой и/или разрезаемой ткани. В различных вариантах осуществления одна из бранш может поддерживать кассету со скобами с, по меньшей мере, двумя содержащимися в ней рядами скоб, расположенными в боковом направлении, а другая бранша может поддерживать упор с формирующими скобу углублениями, совмещенными с рядами скоб в кассете со скобами. По существу сшивающий инструмент может дополнительно включать в себя стержень-толкатель и лезвие скальпеля, которые выполнены с возможностью скольжения относительно бранш для последовательного выталкивания скоб из кассеты со скобами посредством кулачковых поверхностей на стержне-толкателе и/или кулачковых поверхностей на клиновидных салазках, которые проталкиваются стержнем-толкателем. По меньшей мере, в одном варианте осуществления кулачковые поверхности могут быть выполнены с возможностью активации множества выталкивателей скоб, находящихся в кассете и связанных со скобами, чтобы проталкивать скобы к упору и формировать расположенные в боковом направлении ряды деформированных скоб в ткани, зажатой между браншами. По меньшей мере, в одном варианте осуществления лезвие скальпеля может следовать по кулачковым поверхностям и разрезать ткань вдоль линии между рядами скоб. Примеры подобных сшивающих инструментов описаны в патенте США № 7,794,475, озаглавленном SURGICAL STAPLES HAVING COMPRESSIBLE OR CRUSHABLE MEMBERS FOR SECURING TISSUE THEREIN AND STAPLING INSTRUMENTS FOR DEPLOYING THE SAME, полное описание которого включено в настоящий документ путем ссылки.
Изложенное выше описание предназначено лишь для иллюстрации различных аспектов соответствующей технологии в области применения изобретения в настоящее время, и его не следует рассматривать как ограничение объема формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Различные элементы вариантов осуществления, описанные в настоящем документе, наряду с их преимуществами, могут быть понятны после изучения представленного ниже описания вместе с сопроводительными чертежами, причем:
на ФИГ. 1 представлен частичный вид в горизонтальной проекции узла хирургического инструмента, содержащего концевой эффектор, выполненный с возможностью шарнирного поворота и включающий в себя кассету со скобами, причем концевой эффектор, выполненный с возможностью шарнирного поворота, показан в шарнирно неповернутом положении, и при этом в целях сравнения также показано шарнирно повернутое положение кассеты со скобами в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 2 представлен подробный вид шарнирного сочленения узла хирургического инструмента, показанного на ФИГ. 1, которое выполнено с возможностью шарнирного перемещения, как показано на ФИГ. 1;
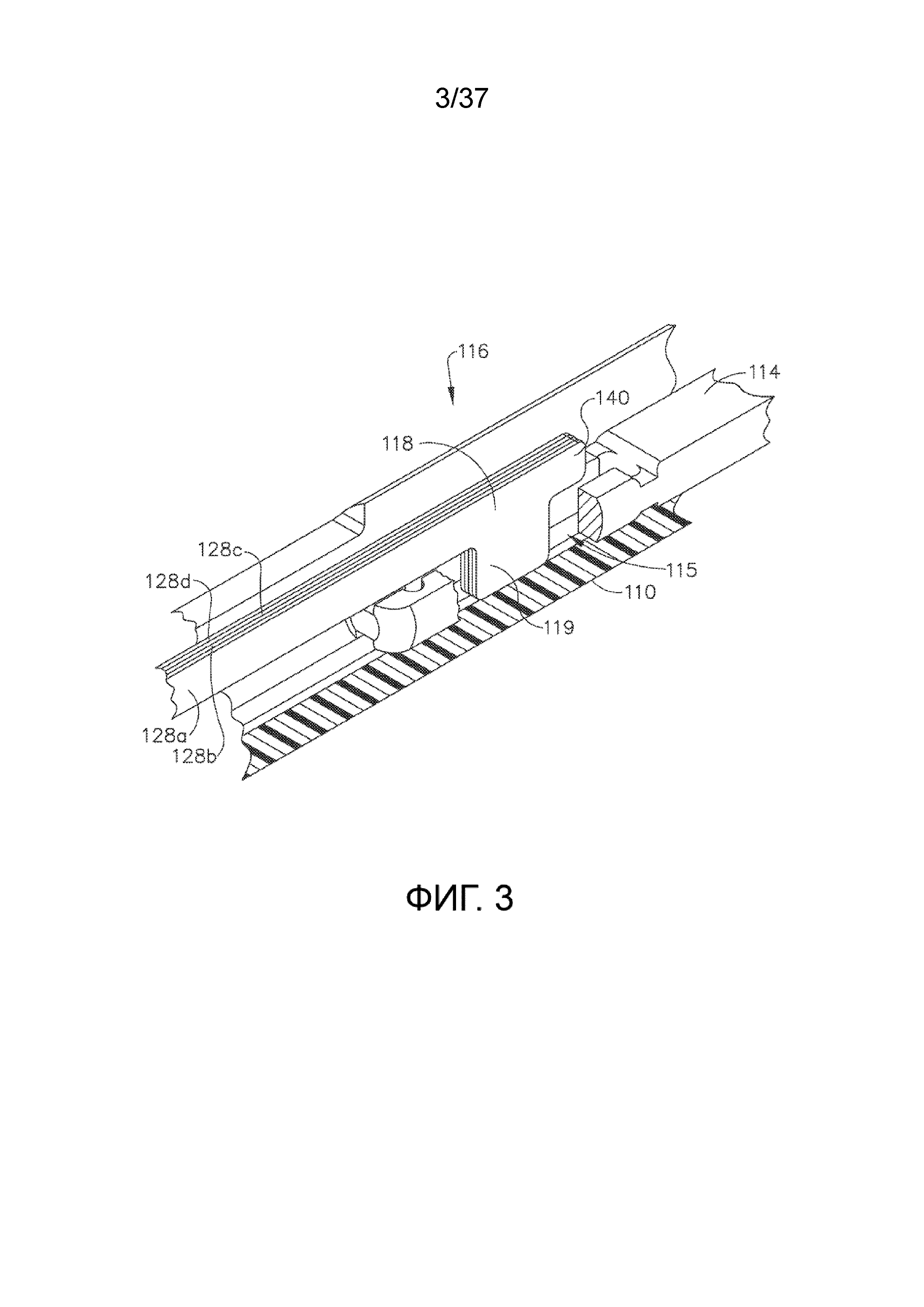
на ФИГ. 3 представлен подробный вид в поперечном сечении взаимного соединения между пусковым штоком и пусковым стержнем пусковой системы узла хирургического инструмента, показанного на ФИГ. 1, при этом пусковая система выполнена с возможностью выталкивания скоб из кассеты со скобами, расположенной в показанном на ФИГ. 1 концевом эффекторе, выполненном с возможностью шарнирного поворота;
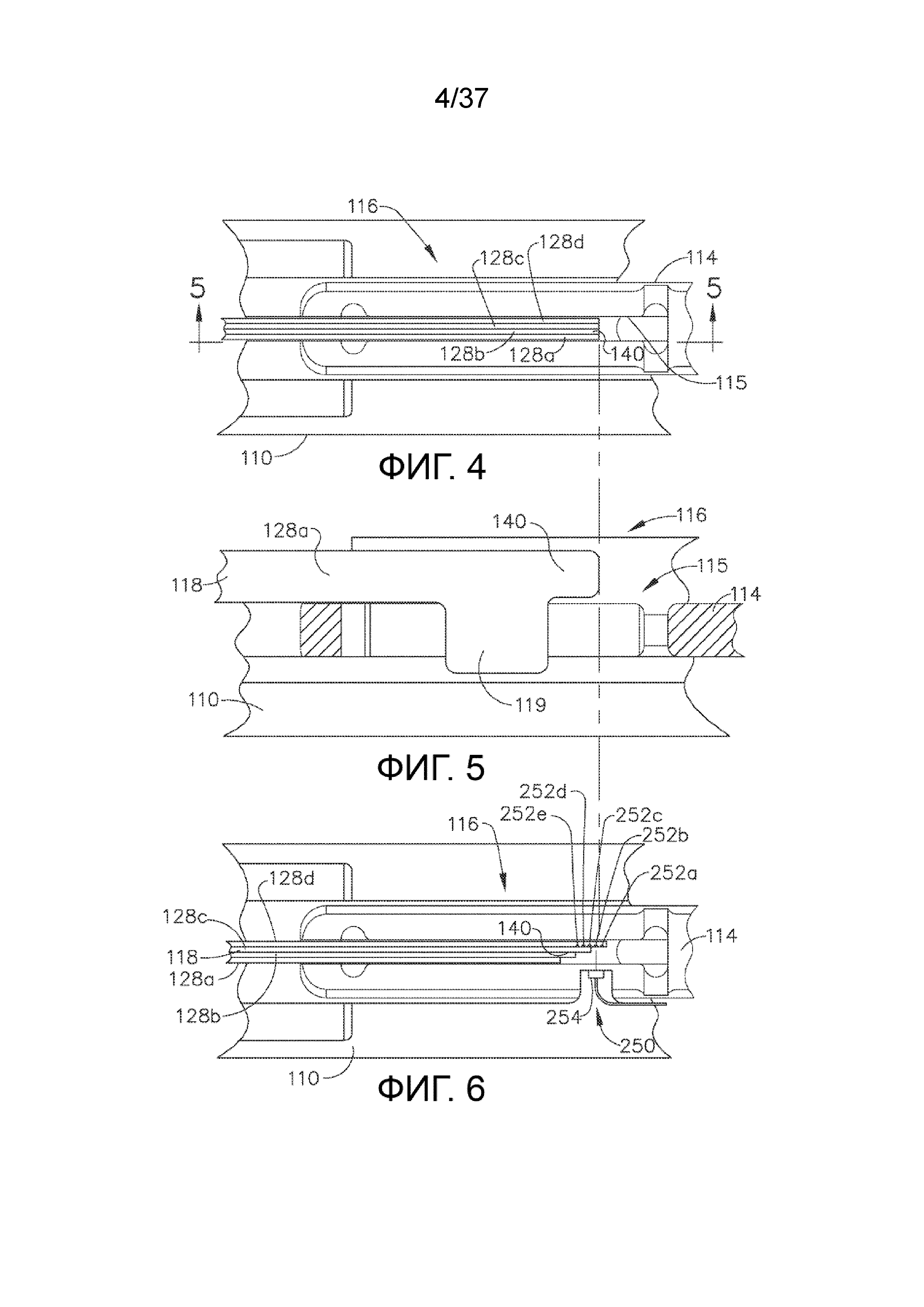
на ФИГ. 4 представлен подробный вид взаимного соединения между пусковым штоком и пусковым стержнем, показанными на ФИГ. 3, которое показано в конфигурации, связанной с шарнирно неповернутым положением концевого эффектора, показанного на ФИГ. 1;
на ФИГ. 5 представлен вид в поперечном сечении взаимного соединения, показанного на ФИГ. 3, выполненном вдоль линии 5-5 на ФИГ. 4;
на ФИГ. 6 представлен вид в поперечном сечении взаимного соединения между пусковым штоком и пусковым стержнем, показанными на ФИГ. 3, которое показано в конфигурации, связанной с шарнирно повернутым положением концевого эффектора, показанного на ФИГ. 1, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 7 представлен вид в перспективе взаимного соединения между пусковым штоком и пусковым стержнем, показанными на ФИГ. 3, которое показано в конфигурации, показанной на ФИГ. 6, которая связана с шарнирно повернутым положением концевого эффектора, показанного на ФИГ. 1;
на ФИГ. 8 представлен вид в перспективе взаимного соединения между пусковым штоком, показанным на ФИГ. 3, и пусковым стержнем пусковой системы, которое показано в конфигурации, связанной с шарнирно повернутым положением концевого эффектора, показанного на ФИГ. 1, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 9 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком, показанным на ФИГ. 3, и пусковым стержнем, которое показано в конфигурации, связанной с шарнирно неповернутым положением концевого эффектора, показанного на ФИГ. 1, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 10 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком и пусковым стержнем, показанными на ФИГ. 9, которое показано в конфигурации, связанной с шарнирно повернутым положением концевого эффектора, показанного на ФИГ. 1;
на ФИГ. 11 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком, показанным на ФИГ. 3, и пусковым стержнем, которое показано в конфигурации, связанной с шарнирно неповернутым положением концевого эффектора, показанного на ФИГ. 1, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 12 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком и пусковым стержнем, показанными на ФИГ. 11, которое показано в конфигурации, связанной с шарнирно повернутым положением концевого эффектора, показанного на ФИГ. 1;
на ФИГ. 13 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком, показанным на ФИГ. 3, и пусковым стержнем пусковой системы, которое показано в конфигурации, связанной с шарнирно неповернутым положением концевого эффектора, показанного на ФИГ. 1, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 14 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком и пусковым стержнем, показанными на ФИГ. 13, которое показано в конфигурации, связанной с шарнирно повернутым положением концевого эффектора, показанного на ФИГ. 1;
на ФИГ. 15 представлен частичный вид с пространственным разделением компонентов взаимного соединения между пусковым штоком, показанным на ФИГ. 3, и пусковым стержнем пусковой системы, которое показано в конфигурации, связанной с шарнирно повернутым положением концевого эффектора, показанного на ФИГ. 1, при этом пусковая система содержит емкостный элемент, выполненный с возможностью перемещения относительно датчика, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 16 представлен график емкости, регистрируемой датчиком, показанным на ФИГ. 15, при перемещении емкостного элемента относительно датчика;
на ФИГ. 17 представлен частичный вид в поперечном сечении в перспективе пускового стержня пусковой системы, содержащей множество боковых участков и систему кодового датчика положения, выполненную с возможностью обнаружения перемещения боковых участков относительно друг друга, в соответствии с различными вариантами осуществления настоящего описания;
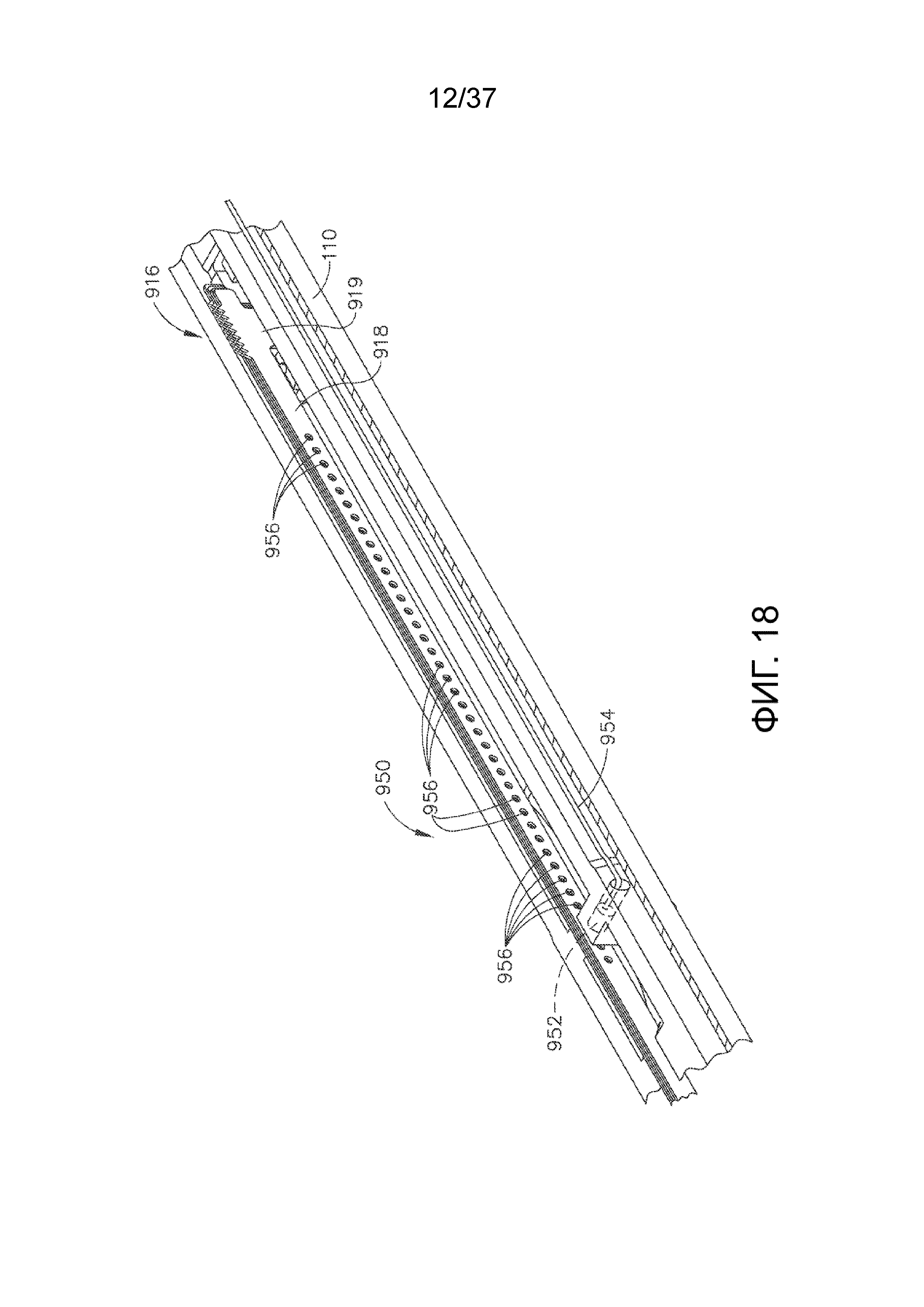
на ФИГ. 18 представлен частичный вид в перспективе пускового стержня пусковой системы, содержащей множество боковых участков и систему кодового датчика положения, выполненную с возможностью обнаружения перемещения боковых участков относительно друг друга, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 19 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком, показанным на ФИГ. 3, и пусковым стержнем пусковой системы, который выполнен с возможностью выталкивания скоб из кассеты со скобами, расположенной в концевом эффекторе системы хирургического инструмента, показанной на ФИГ. 1, при этом пусковая система содержит декомпрессионное соединение между пусковым штоком и пусковым стержнем в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 20 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком и пусковым стержнем, показанными на ФИГ. 19, которое показано в частично сжатом состоянии, которое соответствует частично шарнирно повернутому положению концевого эффектора, показанного на ФИГ. 1;
на ФИГ. 21 представлен частичный вид в поперечном сечении взаимного соединения между пусковым штоком и пусковым стержнем, показанными на ФИГ. 19, которое показано в сжатом состоянии, которое соответствует шарнирно повернутому положению концевого эффектора, показанного на ФИГ. 1;
на ФИГ. 22 представлен частичный вид в поперечном сечении кассеты со скобами и пусковой системы, содержащей салазки для размещения скоб и элемент скальпеля, причем пусковая система содержит элемент компенсации хода, расположенный между салазками и элементом скальпеля, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 23 представлен частичный вид в перспективе канала кассеты, кассеты со скобами, расположенной в канале кассеты, пускового элемента, выполненного с возможностью перемещения относительно кассеты со скобами и канала кассеты, и дистального ограничителя скальпеля, с которым контактирует пусковой элемент, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 24 представлен частичный вид в перспективе дистального конца кассеты со скобами, на котором компоненты удалены для ясности, содержащего дистальные отверстия, сформированные в кассете со скобами, причем дистальные отверстия выполнены с возможностью обеспечения прохода через них участков пусковой системы в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 25 представлен вид в горизонтальной проекции концевого эффектора, выполненного с возможностью шарнирного поворота и содержащего множество ограничителей, выполненных с возможностью ограничения пускового хода пускового элемента в зависимости от величины шарнирного поворота концевого эффектора, при этом концевой эффектор, выполненный с возможностью шарнирного поворота, показан в шарнирно неповернутом положении, и при этом в целях сравнения также показано шарнирно повернутое положение кассеты со скобами в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 26 представлен частичный вид в горизонтальной проекции хирургического инструмента, включающего в себя концевой эффектор, выполненный с возможностью шарнирного поворота, ствол и устройство сдвига пускового пути, при этом концевой эффектор, выполненный с возможностью шарнирного поворота, показан в шарнирно неповернутом положении относительно ствола в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 27 представлен частичный вид в горизонтальной проекции хирургического инструмента, показанного на ФИГ. 26, на котором концевой эффектор, выполненный с возможностью шарнирного поворота, показан в шарнирно повернутом положении относительно ствола;
на ФИГ. 28 представлен вид в перспективе концевого эффектора хирургического сшивающего инструмента в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 29 представлен вид в вертикальной проекции в поперечном сечении концевого эффектора, показанного на ФИГ. 28;
на ФИГ. 30 представлен частичный вид в перспективе канала кассеты концевого эффектора в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 31 представлен вид в вертикальной проекции в поперечном сечении концевого эффектора в закрытом положении, на котором узел пускового элемента показан в неактивированном положении в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 32 представлен вид в вертикальной проекции в поперечном сечении концевого эффектора, показанного на ФИГ. 31, на котором узел пускового элемента показан в частично активированном положении;
на ФИГ. 33 представлен вид в вертикальной проекции в поперечном сечении концевого эффектора, показанного на ФИГ. 31, на котором узел пускового элемента показан в положении в конце хода;
на ФИГ. 34 представлен вид сбоку в вертикальной проекции пускового элемента в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 35 представлен вид в перспективе фиксатора канала концевого эффектора в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 36 представлен частичный вид в перспективе узла концевого эффектора, включающего в себя фиксатор канала, показанный на ФИГ. 35, который связан с возможностью вращения со стволом вокруг шарнирного сочленения, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 37 представлен вид в перспективе в поперечном сечении узла концевого эффектора, показанного на ФИГ. 36, в неактивированном положении;
на ФИГ. 38 представлен вид в перспективе в поперечном сечении узла концевого эффектора, показанного на ФИГ. 36, в положении в конце хода;
на ФИГ. 39 представлена таблица, в которой показаны примеры выходных сигналов на основании состояния узла пускового элемента;
на ФИГ. 40 представлен вид сбоку в вертикальной проекции альтернативного пускового элемента, показанного на ФИГ. 34;
на ФИГ. 41 представлен вид в перспективе в поперечном сечении узла концевого эффектора, включающего в себя альтернативный пусковой элемент, в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 42 представлен вид в перспективе поддерживающего канала кассеты в соответствии с различными вариантами осуществления настоящего описания;
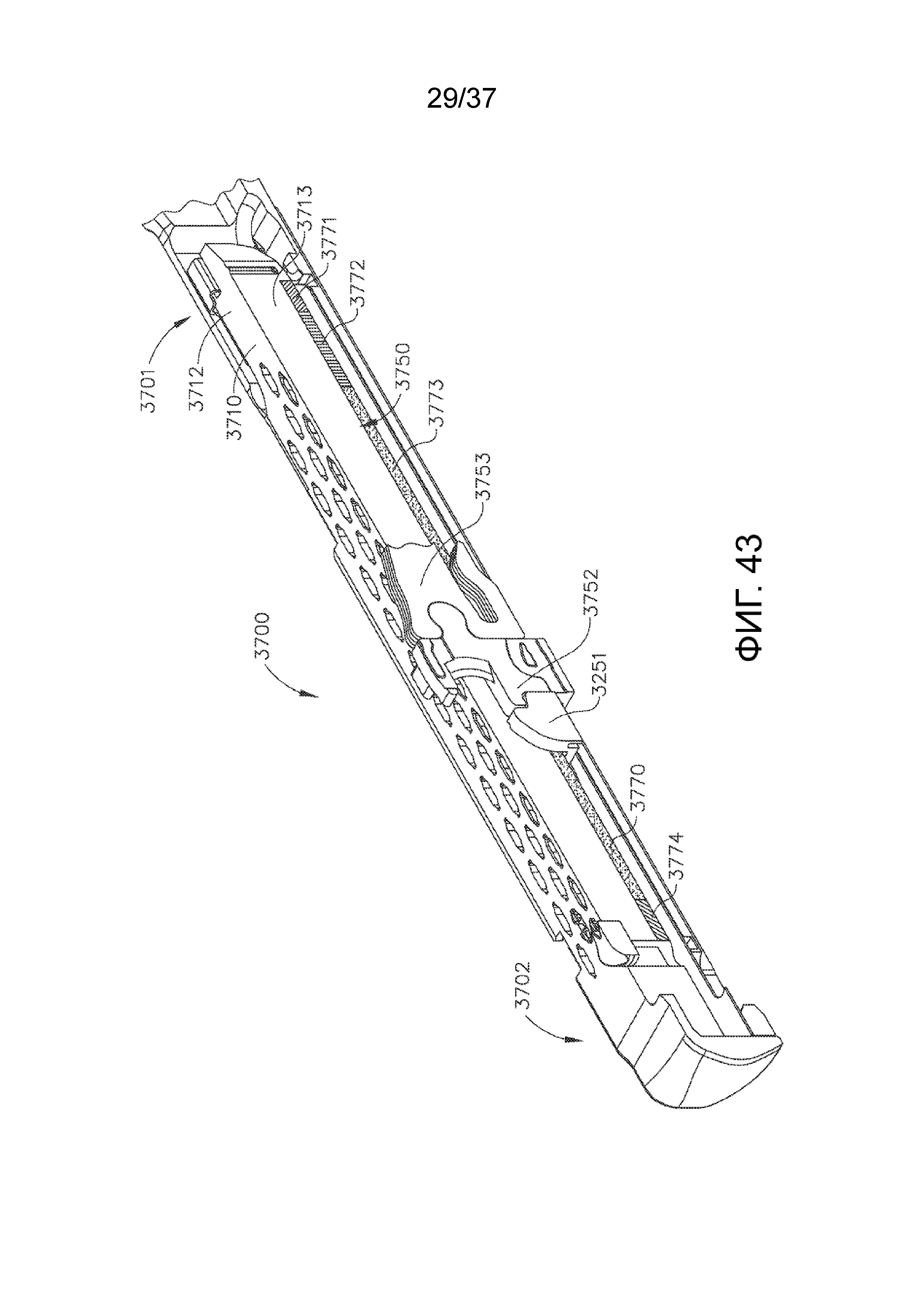
на ФИГ. 43 представлен частичный вид в перспективе в поперечном сечении узла концевого эффектора, содержащего штрипс для обратной связи в соответствии с различными вариантами осуществления настоящего описания;
на ФИГ. 44 представлен частичный вид в перспективе в поперечном сечении узла рукоятки в соответствии с различными вариантами осуществления настоящего описания, на котором части удалены в иллюстративных целях;
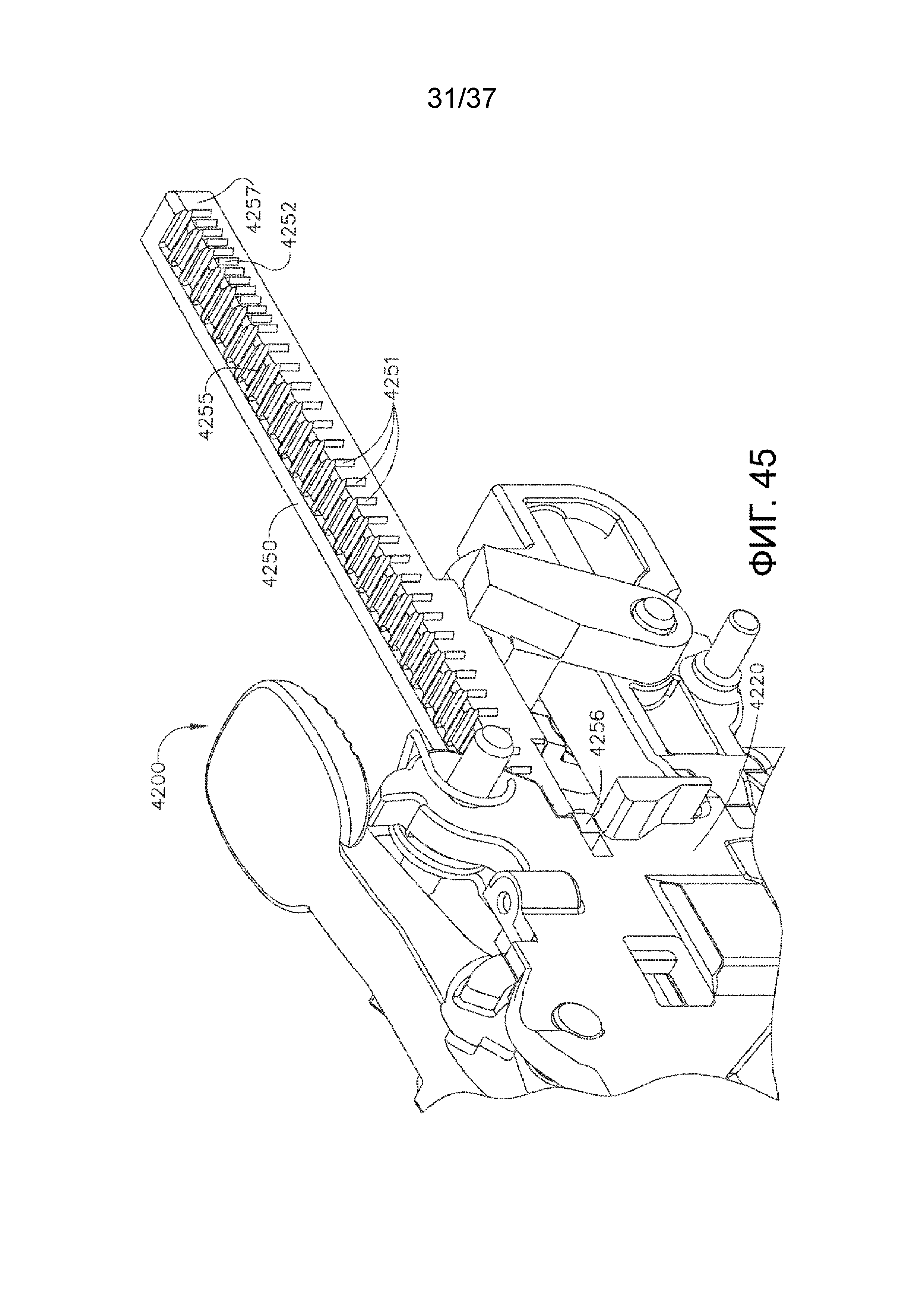
на ФИГ. 45 представлен частичный вид в перспективе узла рукоятки в соответствии с различными вариантами осуществления настоящего описания, на котором части удалены в иллюстративных целях;
на ФИГ. 46 представлен частичный вид в поперечном сечении в горизонтальной проекции узла рукоятки, показанного на ФИГ. 45;
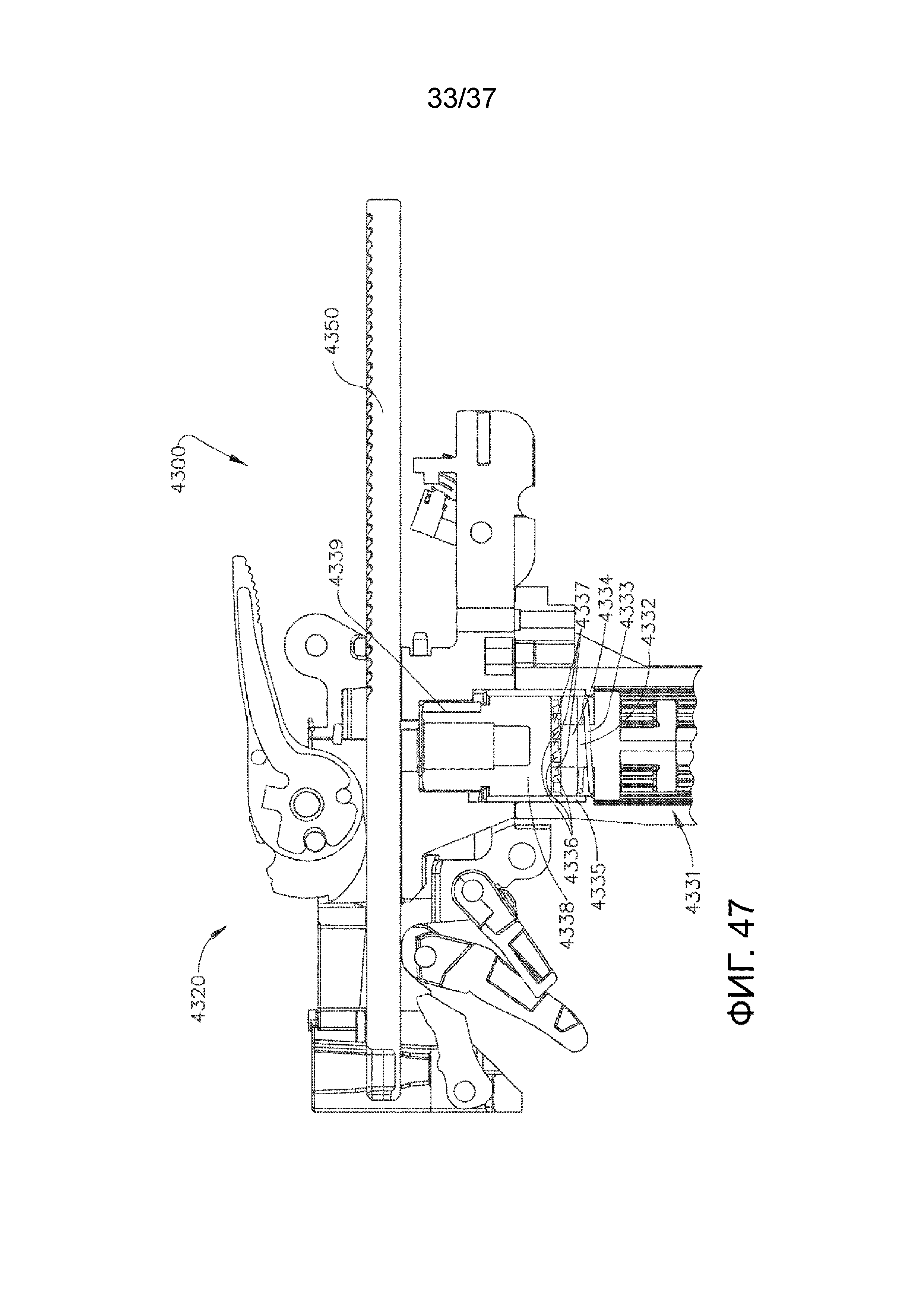
на ФИГ. 47 представлен вид в поперечном сечении в горизонтальной проекции узла рукоятки, содержащего сцепление в соответствии с различными вариантами осуществления настоящего описания, на котором части удалены в иллюстративных целях;
на ФИГ. 48 представлен частичный вид в вертикальной проекции в поперечном сечении концевого эффектора в соответствии с различными вариантами осуществления настоящего описания;
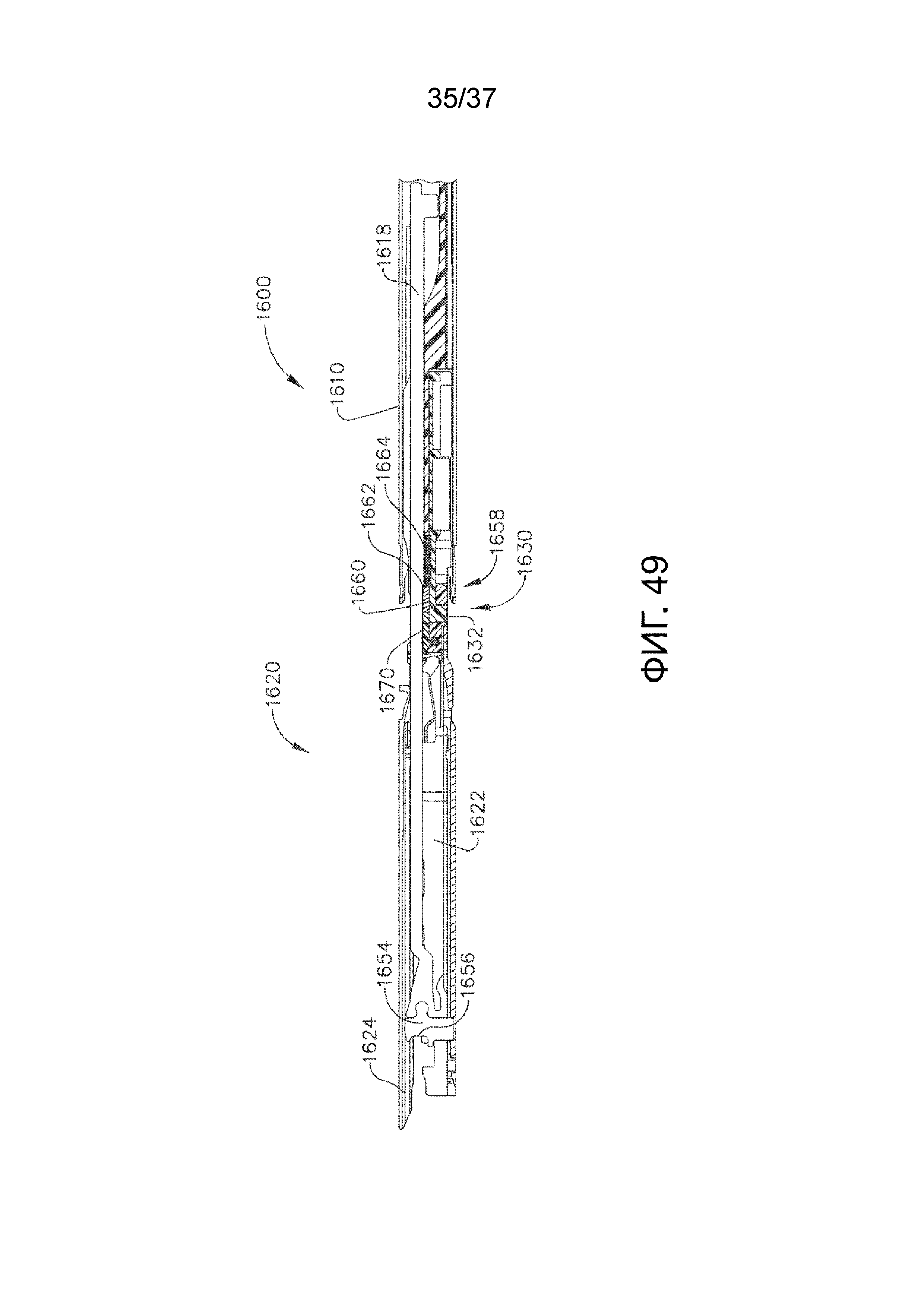
на ФИГ. 49 представлен вид в вертикальной проекции в поперечном сечении концевого эффектора, шарнирного сочленения и части ствола хирургического инструмента в соответствии с различными вариантами осуществления настоящего описания, на котором концевой эффектор показан в шарнирно неповернутом положении и дополнительно показан ограничитель пускового стержня в дистальном положении;
на ФИГ. 50 представлен частичный вид в поперечном сечении в горизонтальной проекции концевого эффектора, шарнирного сочленения и ствола, показанных на ФИГ. 49, на котором концевой эффектор показан в шарнирно неповернутом положении и дополнительно показан ограничитель пускового стержня в дистальном положении;
на ФИГ. 51 представлен частичный вид в вертикальной проекции в поперечном сечении концевого эффектора, шарнирного сочленения и ствола, показанных на ФИГ. 49, на котором концевой эффектор показан в шарнирно неповернутом положении и дополнительно показан ограничитель пускового стержня в дистальном положении;
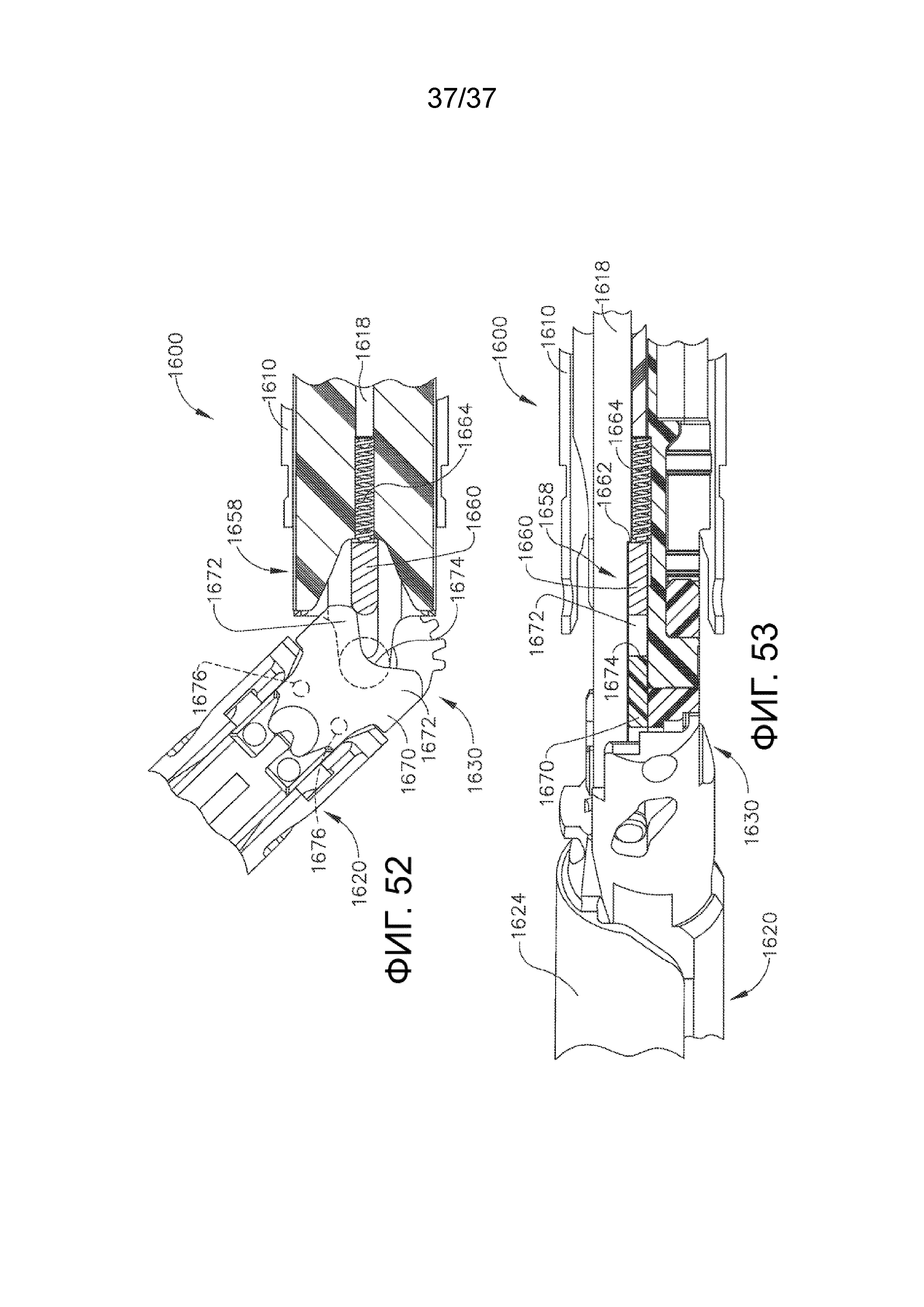
на ФИГ. 52 представлен частичный вид в поперечном сечении в горизонтальной проекции концевого эффектора, шарнирного сочленения и ствола, показанных на ФИГ. 49, на котором концевой эффектор показан в шарнирно повернутом положении и дополнительно показан ограничитель пускового стержня в проксимальном положении; и
на ФИГ. 53 представлен частичный вид в вертикальной проекции в поперечном сечении концевого эффектора, шарнирного сочленения и ствола, показанных на ФИГ. 49, на котором концевой эффектор показан в шарнирно повернутом положении и дополнительно показан ограничитель пускового стержня в проксимальном положении.
Соответствующие элементы на разных видах обозначаются соответствующими условными обозначениями. Иллюстративные примеры, представленные в данном документе, демонстрируют различные варианты осуществления изобретения в одной из его форм; и подразумевается, что такие иллюстративные примеры не ограничивают объем изобретения каким-либо образом.
ПОДРОБНОЕ ОПИСАНИЕ
Заявителю настоящей заявки принадлежат представленные ниже заявки на патенты, поданные в тот же день, причем каждая из них полностью включена в настоящий документ путем ссылки:
- заявка на патент США № _________, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING LOCKABLE SYSTEMS; досье патентного поверенного № END7416USNP/140291;
- заявка на патент США № _______, озаглавленная DRIVE ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS, досье патентного поверенного № END7418USNP/140292;
- заявка на патент США № _______, озаглавленная LOCKING ARRANGEMENTS FOR DETACHABLE SHAFT ASSEMBLIES WITH ARTICULATABLE SURGICAL END EFFECTORS, досье патентного поверенного № END7417USNP/140293;
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT WITH AN ANVIL THAT IS SELECTIVELY MOVABLE ABOUT A DISCRETE NON-MOVABLE AXIS RELATIVE TO A STAPLE CARTRIDGE, досье патентного поверенного № END7485USNP/140295;
- заявка на патент США № _______, озаглавленная URGICAL INSTRUMENTS WITH IMPROVED CLOSURE ARRANGEMENTS; досье патентного поверенного № END7486/140296;
- заявка на патент США № __________, озаглавленная SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS, досье патентного поверенного № END7489USNP/140299;
- заявка на патент США № __________, озаглавленная SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND IMPROVED FIRING BEAM SUPPORT ARRANGEMENTS, досье патентного поверенного № END7491USNP/140301;
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING A FLEXIBLE ARTICULATION SYSTEM; досье патентного поверенного № END7492USNP/140302; и
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING A LOCKABLE ARTICULATION SYSTEM; досье патентного поверенного № END7494USNP/140304.
Заявителю настоящей заявки принадлежат представленные ниже заявки на патенты, поданные 1 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 13/782,295, озаглавленная ARTICULATABLE SURGICAL INSTRUMENTS WITH CONDUCTIVE PATHWAYS FOR SIGNAL COMMUNICATION, в настоящее время публикация заявки на патент США № 2014/0246471;
- заявка на патент США № 13/782,323, озаглавленная ROTARY POWERED ARTICULATION JOINTS FOR SURGICAL INSTRUMENTS, в настоящее время патентная публикация США № 2014/0246472;
- заявка на патент США № 13/782,338, озаглавленная THUMBWHEEL SWITCH ARRANGEMENTS FOR SURGICAL INSTRUMENTS, в настоящее время патентная публикация США № 2014/0249557;
- заявка на патент США № 13/782,499, озаглавленная ELECTROMECHANICAL SURGICAL DEVICE WITH SIGNAL RELAY ARRANGEMENT, в настоящее время публикация заявки на патент США № 2014/0246474;
- заявка на патент США № 13/782,460, озаглавленная MULTIPLE PROCESSOR MOTOR CONTROL FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0246478;
- заявка на патент США № 13/782,358, озаглавленная JOYSTICK SWITCH ASSEMBLIES FOR SURGICAL INSTRUMENTS, в настоящее время патентная публикация США № 2014/0246477;
- заявка на патент США № 13/782,481, озаглавленная SENSOR STRAIGHTENED END EFFECTOR DURING REMOVAL THROUGH TROCAR, в настоящее время публикация заявки на патент США № 2014/0246479;
- заявка на патент США № 13/782,518, озаглавленная CONTROL METHODS FOR SURGICAL INSTRUMENTS WITH REMOVABLE IMPLEMENT PORTIONS, в настоящее время публикация заявки на патент США № 2014/0246475;
- заявка на патент США № 13/782,375, озаглавленная ROTARY POWERED SURGICAL INSTRUMENTS WITH MULTIPLE DEGREES OF FREEDOM, в настоящее время публикация заявки на патент США № 2014/0246473; и
- заявка на патент США № 13/782,536, озаглавленная SURGICAL INSTRUMENT SOFT STOP, в настоящее время публикация заявки на патент США № 2014/0246476.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 14 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 13/803,097, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE, в настоящее время публикация заявки на патент США № 2014/0263542;
- заявка на патент США № 13/803,193, озаглавленная CONTROL ARRANGEMENTS FOR A DRIVE MEMBER OF A SURGICAL INSTRUMENT, в настоящее время патентная публикация США № 2014/0263537;
- заявка на патент США № 13/803,053, озаглавленная INTERCHANGEABLE SHAFT ASSEMBLIES FOR USE WITH A SURGICAL INSTRUMENT, в настоящее время патентная публикация США № 2014/0263564;
- заявка на патент США № 13/803,086, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK, в настоящее время публикация заявки на патент США № 2014/0263541;
- заявка на патент США № 13/803,210, озаглавленная SENSOR ARRANGEMENTS FOR ABSOLUTE POSITIONING SYSTEM FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263538;
- заявка на патент США № 13/803,148, озаглавленная MULTI-FUNCTION MOTOR FOR A SURGICAL INSTRUMENT, в настоящее время патентная публикация США № 2014/0263554;
- заявка на патент США № 13/803,066, озаглавленная DRIVE SYSTEM LOCKOUT ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263565;
- заявка на патент США № 13/803,117, озаглавленная ARTICULATION CONTROL SYSTEM FOR ARTICULATABLE SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263553;
- заявка на патент США № 13/803,130, озаглавленная DRIVE TRAIN CONTROL ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263543; и
- заявка на патент США № 13/803,159, озаглавленная METHOD AND SYSTEM FOR OPERATING A SURGICAL INSTRUMENT, в настоящее время патентная публикация США № 2014/0277017.
Заявителю настоящей заявки принадлежит представленная ниже заявка на патент, поданная 7 марта 2014 г., которая полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/200,111, озаглавленная CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS, в настоящее время патентная публикация США № 2014/0263539.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 26 марта 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/226,106, озаглавленная POWER MANAGEMENT CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,099, озаглавленная STERILIZATION VERIFICATION CIRCUIT;
заявка на патент США № 14/226,094, озаглавленная VERIFICATION OF NUMBER OF BATTERY EXCHANGES/PROCEDURE COUNT;
заявка на патент США № 14/226,117, озаглавленная POWER MANAGEMENT THROUGH SLEEP OPTIONS OF SEGMENTED CIRCUIT AND WAKE UP CONTROL;
заявка на патент США № 14/226,075, озаглавленная MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFT ASSEMBLIES;
заявка на патент США № 14/226,093, озаглавленная FEEDBACK ALGORITHMS FOR MANUAL BAILOUT SYSTEMS FOR SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,116, озаглавленная SURGICAL INSTRUMENT UTILIZING SENSOR ADAPTATION;
заявка на патент США № 14/226,071, озаглавленная SURGICAL INSTRUMENT CONTROL CIRCUIT HAVING A SAFETY PROCESSOR;
заявка на патент США № 14/226,097, озаглавленная SURGICAL INSTRUMENT COMPRISING INTERACTIVE SYSTEMS;
заявка на патент США № 14/226,126, озаглавленная INTERFACE SYSTEMS FOR USE WITH SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,133, озаглавленная MODULAR SURGICAL INSTRUMENT SYSTEM;
заявка на патент США № 14/226,081, озаглавленная SYSTEMS AND METHODS FOR CONTROLLING A SEGMENTED CIRCUIT;
заявка на патент США № 14/226,076, озаглавленная POWER MANAGEMENT THROUGH SEGMENTED CIRCUIT AND VARIABLE VOLTAGE PROTECTION;
заявка на патент США № 14/226,111, озаглавленная SURGICAL STAPLING INSTRUMENT SYSTEM; и
заявка на патент США № 14/226,125, озаглавленная SURGICAL INSTRUMENT COMPRISING A ROTATABLE SHAFT.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 5 сентября 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/479,103, озаглавленная CIRCUITRY AND SENSORS FOR POWERED MEDICAL DEVICE;
- заявка на патент США № 14/479,119, озаглавленная ADJUNCT WITH INTEGRATED SENSORS TO QUANTIFY TISSUE COMPRESSION;
- заявка на патент США № 14/478,908, озаглавленная MONITORING DEVICE DEGRADATION BASED ON COMPONENT EVALUATION;
- заявка на патент США № 14/478,895, озаглавленная MULTIPLE SENSORS WITH ONE SENSOR AFFECTING A SECOND SENSORʹS OUTPUT OR INTERPRETATION;
- заявка на патент США № 14/479,110, озаглавленная USE OF POLARITY OF HALL MAGNET DETECTION TO DETECT MISLOADED CARTRIDGE;
- заявка на патент США № 14/479,098, озаглавленная SMART CARTRIDGE WAKE UP OPERATION AND DATA RETENTION;
- заявка на патент США № 14/479,115, озаглавленная MULTIPLE MOTOR CONTROL FOR POWERED MEDICAL DEVICE; и
- заявка на патент США № 14/479,108, озаглавленная LOCAL DISPLAY OF TISSUE PARAMETER STABILIZATION.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 9 апреля 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/248,590, озаглавленная MOTOR DRIVEN SURGICAL INSTRUMENTS WITH LOCKABLE DUAL DRIVE SHAFTS, в настоящее время публикация заявки на патент США № 2014/0305987;
- заявка на патент США № 14/248,581, озаглавленная SURGICAL INSTRUMENT COMPRISING A CLOSING DRIVE AND A FIRING DRIVE OPERATED FROM THE SAME ROTATABLE OUTPUT, в настоящее время публикация заявки на патент США № 2014/0305989;
- заявка на патент США № 14/248,595, озаглавленная SURGICAL INSTRUMENT SHAFT INCLUDING SWITCHES FOR CONTROLLING THE OPERATION OF THE SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305988;
- заявка на патент США № 14/248,588, озаглавленная POWERED LINEAR SURGICAL STAPLER, в настоящее время публикация заявки на патент США № 2014/0309666;
- заявка на патент США № 14/248,591, озаглавленная TRANSMISSION ARRANGEMENT FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305991;
- заявка на патент США 14/248,584, озаглавленная MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH ALIGNMENT FEATURES FOR ALIGNING ROTARY DRIVE SHAFTS WITH SURGICAL END EFFECTOR SHAFTS, в настоящее время публикация заявки на патент США № 2014/0305994;
- заявка на патент США № 14/248,587, озаглавленная POWERED SURGICAL STAPLER, в настоящее время публикация заявки на патент США № 2014/0309665;
- заявка на патент США № 14/248,586, озаглавленная DRIVE SYSTEM DECOUPLING ARRANGEMENT FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305990; и
- заявка на патент США № 14/248,607, озаглавленная MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH STATUS INDICATION ARRANGEMENTS, в настоящее время публикация заявки на патент США № 2014/0305992.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 16 апреля 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- предварительная заявка на патент США № 61/812,365, озаглавленная SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR;
- предварительная заявка на патент США № 61/812,376, озаглавленная LINEAR CUTTER WITH POWER;
- предварительная заявка на патент США № 61/812,382, озаглавленная LINEAR CUTTER WITH MOTOR AND PISTOL GRIP;
- предварительная заявка на патент США № 61/812,385, озаглавленная SURGICAL INSTRUMENT HANDLE WITH MULTIPLE ACTUATION MOTORS AND MOTOR CONTROL; и
- предварительная заявка на патент США № 61/812,372, озаглавленная SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR.
В настоящем документе приведена различная подробная информация, необходимая для понимания общей конструкции, функциональности, особенностей изготовления и применения вариантов осуществления, описание которых предоставлено в спецификации и проиллюстрировано сопроводительными чертежами. Хорошо известные принципы работы, компоненты и элементы не получили в настоящем документе подробного описания, чтобы не затруднять понимание вариантов осуществления, описанных в спецификации. Читатель должен понимать, что варианты осуществления, описанные и проиллюстрированные в настоящем документе, являются не имеющими ограничительного характера примерами. Следует понимать, что определенные конструктивные и функциональные особенности, описанные в данном документе, могут иметь показательный или пояснительный характер. Изменения и модификации вариантов осуществления, описанных и проиллюстрированных в данном документе, могут выполняться в пределах объема формулы изобретения.
Термины «содержать» (и любые его формы, такие как «содержит» и «содержащий»), «иметь» (и любые его формы, такие как «имеет» и «имеющий»), «включать» (и любые его формы, такие как «включает» и «включающий») и «вмещать» (и любые его формы, такие как «вмещает» и «вмещающий») представляют собой неограниченные связующие глаголы. Таким образом, хирургическая система или устройство, которое «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами. Аналогично элемент системы или устройства, который «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к участку, расположенному ближе всего к врачу, а термин «дистальный» относится к участку, удаленному от врача. Кроме того, для удобства и ясности применительно к чертежам в настоящем документе предлагается использовать такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз». Однако, поскольку использование хирургических инструментов предполагает множество ориентаций и положений, эти термины не следует толковать как ограничивающие и/или абсолютные.
Для выполнения лапароскопических и минимально инвазивных хирургических вмешательств предложены различные примеры устройств и способов. Однако читателю будет вполне понятно, что различные способы и устройства, описанные в настоящем документе, можно применять во множестве хирургических вмешательств и сфер применения, включая, например, те, что связаны с открытыми оперативными вмешательствами. По ходу данного подробного описания читатель сможет в еще большей мере оценить, что разнообразные инструменты, описанные в данном документе, могут быть введены в тело любым способом - как через естественные отверстия, так и через разрез или пункционное отверстие, проделанное в тканях, и т. п. Рабочая часть или насадки концевых зажимов таких инструментов могут быть введены непосредственно в тело пациента либо через устройство доступа, имеющего рабочий канал, через который можно провести концевой зажим и удлиненный стержень хирургического инструмента.
Хирургическая сшивающая система может содержать ствол и концевой эффектор, проходящий от ствола. Концевой эффектор может содержать первую браншу и вторую браншу. Первая бранша содержит кассету со скобами. Кассета со скобами выполнена с возможностью вставки в первую браншу и удаления из нее; однако предусмотрены другие варианты осуществления, в которых кассета со скобами выполнена без возможности извлечения из первой бранши или, по меньшей мере, выполнена с возможностью быстрой замены из первой бранши. Вторая бранша содержит упор, выполненный с возможностью деформации скоб, выталкиваемых из кассеты со скобами. Вторая бранша выполнена с возможностью поворота относительно первой бранши вокруг оси закрытия; однако предусмотрены другие варианты осуществления, в которых первая бранша выполнена с возможностью поворота относительно второй бранши. Хирургическая сшивающая система дополнительно содержит шарнирное сочленение, выполненное с возможностью обеспечения вращения или шарнирного поворота концевого эффектора относительно ствола. Концевой эффектор выполнен с возможностью вращения вокруг оси шарнирного сочленения, проходящей через шарнирное сочленение. Предусмотрены другие варианты осуществления, которые не включают в себя шарнирное сочленение.
Кассета со скобами содержит корпус кассеты. Корпус кассеты включает в себя проксимальный конец, дистальный конец и платформу, проходящую между проксимальным концом и дистальным концом. В процессе применения кассета со скобами расположена на первой стороне ткани, подлежащей сшиванию, а упор расположен на второй стороне ткани. Упор перемещается к кассете со скобами для сжатия и прижимания ткани к платформе. После этого скобы, хранящиеся в корпусе кассеты с возможностью извлечения, можно размещать в ткани. Корпус кассеты включает в себя сформированные в нем полости для скоб, при этом скобы хранятся в полостях для скоб с возможностью извлечения. Полости для скоб расположены в шесть продольных рядов. Три ряда полостей для скоб расположены на первой стороне продольного паза, и три ряда полостей для скоб расположены на второй стороне продольного паза. Возможны другие конструкции скоб и полостей для скоб.
В корпусе кассеты скобы поддерживаются с помощью выталкивателей скоб. Выталкиватели выполнены с возможностью перемещения между первым, или неактивированным, положением и вторым, или активированным, положением для выталкивания скоб из полостей для скоб. Выталкиватели удерживаются в корпусе кассеты с помощью фиксатора, который проходит вокруг нижней части корпуса кассеты и включает в себя упругие элементы, выполненные с возможностью захвата корпуса кассеты и удерживания фиксатора относительно корпуса кассеты. Выталкиватели выполнены с возможностью перемещения между их неактивированными положениями и активированными положениями с помощью салазок. Салазки выполнены с возможностью перемещения между проксимальным положением, смежным с проксимальным концом, и дистальным положением, смежным с дистальным концом. Салазки содержат множество наклонных поверхностей, выполненных с возможностью скольжения под выталкивателями и подъема выталкивателей и поддерживаемых на них скоб к упору.
В дополнение к указанному выше салазки перемещаются дистально с помощью пускового элемента. Пусковой элемент выполнен с возможностью контакта с салазками и проталкивания салазок к дистальному концу. Продольный паз, сформированный в корпусе кассеты, выполнен с возможностью приема пускового элемента. Упор также включает в себя паз, выполненный с возможностью приема пускового элемента. Пусковой элемент дополнительно содержит первый кулачок, который взаимодействует с первой браншей, и второй кулачок, который взаимодействует со второй браншей. При выдвижении пускового элемента дистально первый кулачок и второй кулачок позволяют контролировать расстояние, или тканевый зазор, между платформой кассеты со скобами и упором. Пусковой элемент также содержит скальпель, выполненный с возможностью рассечения ткани, захваченной между кассетой со скобами и упором. Желательно, по меньшей мере, частично располагать скальпель проксимально по отношению к наклонным поверхностям таким образом, чтобы скобы выталкивались раньше скальпеля.
Концевой эффектор может быть выполнен с возможностью шарнирного поворота относительно рукоятки и/или ствола хирургического инструмента. Например, концевой эффектор может быть связан с возможностью поворота и/или вращения со стволом хирургического инструмента таким образом, что концевой эффектор выполнен с возможностью поворота относительно ствола и рукоятки. В различных примерах концевой эффектор может быть выполнен с возможностью шарнирного поворота в области шарнирного сочленения, размещенного между концевым эффектором и стволом. В других примерах ствол может включать в себя проксимальный участок, дистальный участок и шарнирное сочленение, которое может быть размещено, например, между проксимальным участком и дистальным участком ствола.
На ФИГ. 1 и 2 частично показано шарнирное сочленение 130 хирургического инструмента 100. Хирургический инструмент 100 включает в себя ствол 110 и концевой эффектор 120, выполненный с возможностью шарнирного поворота. Концевой эффектор 120, выполненный с возможностью шарнирного поворота и показанный на ФИГ. 1 и 2, связан со стволом 110 хирургического инструмента 100 в области шарнирного сочленения 130, которое обеспечивает шарнирный поворот концевого эффектора 120 относительно ствола 110. Кассета 122 со скобами расположена в показанном концевом эффекторе 120. Как преимущественно показано на ФИГ. 1, показанная кассета 122 со скобами включает в себя корпус 124 кассеты, имеющий множество полостей 126 для скоб. В различных примерах крепежные элементы, например такие как скобы, могут быть расположены в полостях 126 для скоб с возможностью удаления.
В отдельных примерах кассета 122 со скобами может быть расположена в концевом эффекторе 120 с возможностью извлечения, а в других примерах кассета 122 со скобами может быть выполнена с возможностью постоянного крепления к и/или за одно целое с концевым эффектором 120. В отдельных примерах корпус 124 кассеты может включать в себя жесткий корпус, имеющий сформированные полости 126 для скоб. Дополнительно или альтернативно корпус 124 кассеты может включать в себя гибкий и/или деформируемый участок, а скобы могут быть встроены и/или частично встроены в корпус 124 кассеты.
Хирургический инструмент может включать в себя гибкий пусковой стержень, который может проходить через шарнирное сочленение. В таких примерах гибкий пусковой стержень может быть выполнен с возможностью прогиба или изгиба в области шарнирного сочленения, когда концевой эффектор находится в шарнирно повернутом положении. В, по меньшей мере, одном примере гибкий пусковой стержень может включать в себя множество боковых слоев или участков. Гибкий пусковой стержень может формировать внутренний радиус кривизны и внешний радиус кривизны изгиба в шарнирном сочленении. Например, наружный боковой участок гибкого пускового стержня может проходить вдоль первого пути, который формирует внешний радиус кривизны в пределах шарнирного сочленения, а внутренний боковой участок гибкого пускового стержня может проходить вдоль второго пути, который формирует внутренний радиус кривизны в пределах шарнирного сочленения. Внешний радиус кривизны пускового стержня может быть больше внутреннего радиуса кривизны. В результате внутренний боковой участок гибкого пускового стержня может проходить большее расстояние в проксимальном направлении, чем наружный боковой участок гибкого пускового стержня. Радиус кривизны каждого бокового участка и, следовательно, соответствующее положение каждого бокового участка может зависеть от угла шарнирного поворота концевого эффектора.
В дополнение к указанному выше при прогибе гибкого пускового стержня в области шарнирного сочленения боковые участки могут быть выполнены с возможностью сдвига относительно друг друга. В различных примерах боковые участки выполнены с возможностью соединения друг с другом на дистальном конце, например с помощью сварки. В таких примерах оставшаяся длина каждого бокового участка, т. е. несвязанные участки, может быть выполнена с возможностью свободного сдвига и/или скольжения относительно смежного (-ых) бокового (-ых) участка (-ов).
В различных примерах при прогибе гибкого пускового стержня и сдвиге боковых участков проксимальные концы некоторых боковых участков могут смещаться, например относительно других боковых участков. В отдельных примерах проксимальный конец, по меньшей мере, одного бокового участка выполнен с возможностью смещения дистально, а, например, проксимальный конец, по меньшей мере, одного бокового участка выполнен с возможностью смещения проксимально. В других примерах проксимальные концы каждого бокового участка выполнены, например, с возможностью смещения и/или продвижения проксимально. Положение каждого бокового участка внутри ствола и относительно других боковых участков может зависеть от угла шарнирного поворота концевого эффектора.
В различных примерах гибкий пусковой стержень выполнен с возможностью соединения с пусковым штоком или штангой. Пусковой шток может быть выполнен с возможностью передачи пусковой силы гибкому пусковому стержню. В отдельных примерах пусковой шток может быть выполнен с возможностью перемещения на предварительно заданное расстояние для смещения гибкого пускового стержня в предварительно заданное самое дистальное положение в шарнирно неповернутом концевом эффекторе. Однако когда концевой эффектор шарнирно повернут, а проксимальные концы бокового участка сдвинуты, перемещение пускового штока на предварительно заданное расстояние не приводит к смещению гибкого пускового стержня в предварительно заданное самое дистальное положение в шарнирно повернутом концевом эффекторе. Напротив, при шарнирном повороте концевого эффектора гибкий пусковой стержень может остановиться незадолго до предварительно заданного самого дистального положения, если пусковой шток смещается только на предварительно заданное расстояние. Более того, дистальное положение, которого достигает гибкий пусковой стержень при смещении пускового штока на предварительно заданное расстояние, может зависеть от угла шарнирного поворота концевого эффектора.
Таким образом, при шарнирном повороте концевого эффектора салазки для размещения скоб и/или режущий край, приводимый в движение с помощью гибкого пускового стержня и проходящий через кассету со скобами, могут не достичь самого дистального положения относительно дистального конца концевого эффектора. Напротив, пусковая система может прекратить выдвижение салазок и/или режущего края до того, как салазки и/или режущий край достигнут дистального положения, которого можно было бы достичь, если бы концевой эффектор находился в шарнирно неповернутом положении. Следовательно, при шарнирном повороте концевого эффектора режущий край может не завершить режущее перемещение, и/или салазки могут не завершить пусковое перемещение и, таким образом, могут не выталкивать скобы из самых дистальных полостей для скоб. В различных примерах угол шарнирного поворота концевого эффектора может влиять на дистальное положение, достигаемое гибким пусковым стержнем, салазками для размещения скоб и/или режущим краем во время пускового хода.
В отдельных примерах пусковой ход выполнен с возможностью регулирования, чтобы обеспечить достижение гибким пусковым стержнем, салазками для размещения скоб и/или режущим краем заданных самых дистальных положений внутри концевого эффектора. Например, при шарнирном повороте концевого эффектора пусковой ход можно регулировать таким образом, чтобы пусковой шток смещался на большее расстояние. В отдельных примерах регулирование пускового хода может зависеть от угла шарнирного поворота концевого эффектора. Например, смещение пускового штока во время отрегулированного пускового хода может увеличиваться при увеличении угла шарнирного поворота концевого эффектора.
В случае хирургического инструмента 100 и его компонентов, показанных на ФИГ. 1-7, хирургический инструмент 100 включает в себя пусковую систему 112, которая выполнена с возможностью передачи пускового перемещения от рукоятки хирургического инструмента 100 концевому эффектору 120. В показанном варианте осуществления пусковая система 112 включает в себя пусковой шток 114, который связан с гибким пусковым стержнем 118 в области сцепления или соединения 116 (ФИГ. 3-7). Пусковой шток 114 может проходить в ствол 110 и может поступательно перемещаться в ответ на приводные перемещения, инициируемые в рукоятке хирургического инструмента 100. В различных примерах пусковой шток 114 выполнен с возможностью сопротивления деформации, закручиванию и/или изгибанию при передаче пускового перемещения. Например, пусковой шток 114 может быть выполнен из жесткого и/или негибкого материала и/или конструкции.
Как преимущественно показано на ФИГ. 3-5, в области сцепления 116 пусковой шток 114 взаимодействует с ключом 119 гибкого пускового стержня 118. Например, ключ 119 может проходить в отверстие 115 в пусковом штоке 114. Зацепление пускового штока и ключа выполнено с возможностью передачи поступательного перемещения пускового штока 114 гибкому пусковому стержню 118. В различных примерах сцепление 116 может находиться вблизи от шарнирного сочленения 130 таким образом, чтобы гибкий пусковой стержень 118 проходил от сцепления 116 через шарнирное сочленение 130.
Гибкий пусковой стержень 118 включает в себя множество боковых участков или слоев 128a, 128b, 128c, 128d. В различных примерах участки 128a, 128b, 128c, 128d выполнены с возможностью удерживания вместе и перемещения и/или сдвига относительно друг друга. Например, боковые участки 128a, 128b, 128c, 128d могут быть соединены вместе на дистальном конце гибкого пускового стержня 118. Участки 128a, 128b, 128c, 128d могут быть, например, соединены с помощью сварки, образованы как одно целое, скреплены и/или иным образом присоединены друг к другу в области их дистальных концов. По меньшей мере, часть оставшейся длины боковых участков 128a, 128b, 128c, 128d может быть выполнена с возможностью перемещения и/или сдвига относительно смежного (-ых) бокового (-ых) участка (-ов) 128a, 128b, 128c, 128d. Например, при изгибе гибкого пускового стержня 118 в области шарнирного сочленения 130 боковые участки 128a, 128b, 128c, 128d могут сдвигаться в ступенчатую и/или смещенную конфигурацию между изгибом в области шарнирного сочленения 130 и проксимальным концом гибкого пускового стержня 118, как показано на ФИГ. 6.
Как показано на ФИГ. 1-3, участки 128a, 128b, 128c, 128d гибкого пускового стержня 118 могут проходить вдоль пусковых путей через шарнирное сочленение 130. При шарнирном повороте концевого эффектора 120 относительно ствола 110 гибкий пусковой стержень 118 и его участки 128a, 128b, 128c, 128d могут гнуться внутри шарнирного сочленения 130. В таких примерах боковые участки 128a, 128b, 128c, 128d могут проходить вдоль измененных путей при шарнирном повороте концевого эффектора 120.
Например, как преимущественно показано на ФИГ. 2, наружный участок 128a может проходить вдоль наружного пути, имеющего внешний радиус кривизны, а внутренний участок 128d может проходить вдоль внутреннего пути, имеющего внутренний радиус кривизны. Вследствие деформации пускового стержня 118 внутри шарнирного сочленения 130 внутренний радиус кривизны может отличаться от внешнего радиуса кривизны. Например, как показано на ФИГ. 1 и 2, внешний радиус кривизны больше внутреннего радиуса кривизны. В результате, как показано на ФИГ. 6, для участков 128a, 128b, 128c, 128d может быть характерна ступенчатая форма на проксимальном концевом участке 140 гибкого пускового стержня 118, когда концевой эффектор 120 находится в шарнирно повернутом положении относительно ствола 110.
В отдельных примерах сдвинутый проксимальный концевой участок 140 гибкого пускового стержня 118 и участки 128a, 128b, 128c, 128d пускового стержня могут в конечном счете влиять на дистальное положение, которого достигает гибкий пусковой стержень 118 во время пускового хода. Например, дистальное положение, которого достигает гибкий пусковой стержень 118 во время пускового хода, может меняться при шарнирном повороте концевого эффектора 120. В результате дистальное положение, которого достигают салазки для размещения скоб и/или режущий элемент во время пускового хода, также может сдвигаться, когда концевой эффектор 120 находится в шарнирно повернутом положении.
В отдельных примерах может быть желательно оценить расстояние, на которое может смещаться гибкий пусковой стержень 118 во время пускового хода, на основании расчетов и/или приближенных представлений. Такие расчеты и/или приближенные представления могут быть основаны на величине угла шарнирного поворота концевого эффектора. В других примерах может быть желательно отслеживать и/или иным образом определять положение гибкого пускового стержня 118 во время пускового хода. Например, по меньшей мере, один датчик на дистальном конце, проксимальном конце и/или промежуточном участке гибкого пускового стержня 118 выполнен с возможностью обнаружения смещения гибкого пускового стержня 118 во время пускового хода и/или сдвига боковых участков 128a, 128b, 128c, 128d во время шарнирного поворотного перемещения. В различных примерах датчик может содержать, например, резистивный датчик, индуктивный датчик, емкостный датчик и/или магнитный датчик.
В различных примерах может быть желательно регулировать длину пускового хода на основании положения гибкого пускового стержня 118 и/или величины угла шарнирного поворота концевого эффектора 120. В различных примерах система обнаружения и/или датчик могут быть выполнены с возможностью сдвига боковых участков 128a, 128b, 128c, 128d гибкого пускового стержня 118 для определения величины угла шарнирного поворота концевого эффектора 120. В отдельных примерах система обнаружения и/или датчик могут быть расположены проксимально относительно шарнирного сочленения 130. Например, система обнаружения и/или датчик могут быть расположены внутри ствола 110 и/или вблизи от проксимального конца 140 гибкого пускового стержня 118 и/или его боковых участков 128a, 128b, 128c, 128d. В других примерах система обнаружения и/или датчик могут быть выполнены с возможностью отслеживания положения гибкого пускового стержня 118 во время пускового хода и регулирования длины пускового хода на основании обнаруженного положения гибкого пускового стержня 118. Например, система обнаружения и/или датчик могут быть расположены в концевом эффекторе 120 и/или дистально относительно шарнирного сочленения 130. В других примерах такой датчик выполнен с возможностью размещения в стволе 110 хирургического инструмента 100 проксимально относительно шарнирного сочленения 130.
Хирургический инструмент 100 может включать в себя датчик, например такой как датчик на эффекте Холла и/или омический контакт, который может быть выполнен с возможностью обнаружения сдвига боковых участков 128a, 128b, 128c, 128d при шарнирном повороте концевого эффектора 120. Как описано в настоящем документе, величина сдвига может соответствовать углу шарнирного поворота концевого эффектора 120. Система 250 обнаружения показана на ФИГ. 6 и 7. Система 250 обнаружения может быть выполнена с возможностью обнаружения сдвига и/или колебания боковых участков 128a, 128b, 128c, 128d на проксимальном конце 140 гибкого пускового стержня 118 (ФИГ. 1-7).
Как показано на ФИГ. 6 и 7, система 250 обнаружения выполнена с возможностью установки и/или иного расположения в стволе 110 хирургического инструмента 100 (ФИГ. 1). В различных примерах система 250 обнаружения может включать в себя, по меньшей мере, один магнит и датчик на эффекте Холла. Например, показанная система 250 обнаружения включает в себя серию магнитов 252a, 252b, 252c, 252d и 252e и, например, датчик 254 на эффекте Холла. Магниты 252a, 252b, 252c, 252d и 252e расположены на пусковом стержне 118. Например, магниты 252a, 252b, 252c, 252d и 252e размещены с интервалами вдоль проксимального концевого участка 140 пускового стержня 118 внутри соединения 116.
Как показано на ФИГ. 6, магниты 252a, 252b, 252c, 252d и 252e выполнены с возможностью прикрепления к, по меньшей мере, одному из боковых участков 128a, 128b, 128c, 128d гибкого пускового стержня 118. В показанной конструкции магниты 252a, 252b, 252c, 252d и 252e прикреплены к четвертому участку 128d. Более того, датчик 254 на эффекте Холла также может быть расположен в стволе 110. Например, датчик 254 на эффекте Холла может быть закреплен на стволе 110 над проксимальным концевым участком 140 пускового стержня 118. В таких примерах датчик 254 на эффекте Холла может быть неподвижным или стационарным относительно ствола 110, а магниты 252a, 252b, 252c, 252d и 252e могут быть выполнены с возможностью перемещения относительно датчика 254 при шарнирном повороте концевого эффектора 120.
В отдельных примерах система 250 обнаружения может включать в себя менее или более пяти магнитов 252a, 252b, 252c, 252d и 252e, показанных на ФИГ. 6 и 7. Кроме того, магниты 252a, 252b, 252c, 252d и 252e могут быть прикреплены к множеству боковых участков 128a, 128b, 128c, 128d и/или закреплены на множестве таких участков. Более того, как описано в настоящем документе, по меньшей мере, один датчик на эффекте Холла выполнен с возможностью установки на одном или более боковых участках 128a, 128c, 128c, 128d.
Магниты могут, например, включать в себя постоянные магниты и/или электромагниты. В отдельных примерах участки 128a, 128b, 128c, 128d могут включать в себя, например, черный металл, из которого могут быть сформированы магниты системы 250 обнаружения. Например, черный металл может быть встроен в боковые участки 128a, 128b, 128c, 128d и/или может содержать покрытие вокруг области боковых участков 128a, 128b, 128c, 128d.
Благодаря конструкции различных компонентов системы 250 обнаружения такая система 250 обнаружения может быть выполнена с возможностью обнаружения величины колебания пускового стержня, которое происходит при перемещении концевого эффектора 120 (ФИГ. 1) в шарнирно повернутое положение. В различных примерах при изгибе пускового стержня 118 в шарнирном сочленении 130 боковые участки 128a, 128b, 128c, 128d выполнены с возможностью сдвига таким образом, что происходит смещение проксимальных концов участков 128a, 128b, 128c, 128d. При смещении участков 128a, 128b, 128c, 128d относительно друг друга также могут смещаться магниты 252a, 252b, 252c, 252d и 252e, установленные на четвертом участке 128d. В таких примерах датчик 254 на эффекте Холла выполнен с возможностью обнаружения смещения магнитов 252a, 252b, 252c, 252d и 252e. На основании обнаруженного смещения магнитов 252a, 252b, 252c, 252d и 252e можно определить и/или оценить угол шарнирного поворота концевого эффектора.
В различных примерах система 250 обнаружения выполнена с возможностью обмена данными с контроллером, который может быть выполнен с возможностью обнаружения угла шарнирного поворота на основании обратной связи от датчика 254 на эффекте Холла. Дополнительно или альтернативно контроллер может быть выполнен с возможностью регулирования длины пускового хода на основании расчетной и/или предполагаемой величины угла шарнирного поворота концевого эффектора на основании обнаруженного выноса и/или смещений между боковыми участками 128a, 128b, 128c, 128d. В таких примерах контроллер выполнен с возможностью регулирования длины пускового хода таким образом, что гибкий пусковой стержень 118 достигает предварительно заданного самого дистального положения в концевом эффекторе 120, т. е. того же предварительно заданного самого дистального положения, которого достигает пусковой стержень 118, когда концевой эффектор 120 находится в шарнирно неповернутом положении.
В различных примерах система кодирования может быть выполнена с возможностью обнаружения и/или определения величины угла шарнирного поворота концевого эффектора. Например, как показано на ФИГ. 8, гибкий пусковой стержень 318 может быть связан с пусковым штоком 114 в области сцепления 316. Аналогично гибкому пусковому стержню 118 (ФИГ. 1-7) гибкий пусковой стержень 318 выполнен с возможностью передачи пускового перемещения от пускового штока 114 к концевому эффектору 120 (ФИГ. 1 и 2) через шарнирное сочленение 130 (ФИГ. 1 и 2). Гибкий пусковой стержень 318 может включать в себя множество боковых участков 328a, 328b, 328c и 328d, которые выполнены с возможностью сдвига относительно друг друга при шарнирном повороте концевого эффектора 120. Аналогично описанному выше проксимальные концы участков 328a, 328b, 328c и 328d могут располагаться ступенчато, как показано на ФИГ. 8. Участки 328a, 328b, 328c и 328d могут включать в себя неровные секции и/или секции 352 неправильной формы на проксимальном концевом участке 340 гибкого пускового стержня 318.
В показанном варианте осуществления каждая неровная секция 352 включает в себя множество зубцов 354. В других примерах каждая неровная секция 352 включает в себя одиночный зубец 354. Дополнительно или альтернативно, по меньшей мере, одна неровная секция 352 может формировать множество контуров, угловых участков, впадин и/или пиков. В отдельных примерах зубцы 354 могут образовывать, например, профилированные и/или скругленные впадины и/или пики таким образом, что зубцы 354 формируют, например, волнистый и волнообразный профиль. В отдельных примерах два или более боковых участков 328a, 328b, 328c, 328d могут включать в себя неровную секцию 352. В некоторых примерах каждый боковой участок 328a, 328b, 328c, 328d может включать в себя, по меньшей мере, одну неровную секцию 352. В различных примерах, по меньшей мере, две неровные секции 352 могут формировать отличные друг от друга профили.
На ФИГ. 8 представлена система 350 линейного кодирования. Система 350 линейного кодирования включает в себя генератор 356 сигналов и приемник 358 сигналов. Генератор 356 сигналов может быть выполнен с возможностью отправки сигналов приемнику 358 сигналов. При прохождении сигналов по неровной (-ым) секции (-ям) 352 участка (-ов) 328a, 328b, 328c и 328d, по меньшей мере, некоторые из сигналов выполнены с возможностью отклонения и/или переадресации. Более того, когда неровные секции 352 смещаются, располагаются ступенчато и/или оказываются иным образом подвержены воздействию шарнирного поворота концевого эффектора 120, приемник 358 сигнала может обнаруживать изменение полученного сигнала и определять относительное расположение боковых участков 328a, 328b, 328c, 328d и, таким образом, определять величину угла шарнирного поворота концевого эффектора 120.
В различных примерах система 350 обнаружения может обмениваться данными с контроллером, который может быть выполнен с возможностью обнаружения угла шарнирного поворота концевого эффектора 120 на основании обратной связи от приемника 358. Дополнительно или альтернативно контроллер может быть выполнен с возможностью регулирования длины пускового хода на основании обнаруженного выноса и/или смещений между участками 328a, 328b, 328c, 328d, которые используются для расчета и/или оценки величины угла шарнирного поворота концевого эффектора. В таких примерах контроллер выполнен с возможностью регулирования длины пускового хода таким образом, что гибкий пусковой стержень 318 достигает предварительно заданного самого дистального положения в концевом эффекторе, т. е. того же предварительно заданного самого дистального положения, которого достигает пусковой стержень 118, когда концевой эффектор 120 находится в шарнирно неповернутом положении.
В различных вариантах система 350 кодирования может включать в себя, например, оптическое, магнитное и/или емкостное кодирующее устройство. В отдельных вариантах осуществления генератор 356 сигналов выполнен с возможностью генерирования волны, например такой как световая волна, радиоволна, микроволна и/или рентгеновские лучи. В некоторых примерах генератор 356 сигналов выполнен с возможностью генерирования, например, множества лазерных сигналов.
В отдельных примерах электропроводный материал может быть выполнен с возможностью обнаружения величины ступенчатого расхождения между боковыми участками пускового стержня. Как показано на ФИГ. 9 и 10, к проксимальному концу гибкого пускового стержня 418 присоединена лента 450. Аналогично гибкому пусковому стержню 118 (ФИГ. 1-7) гибкий пусковой стержень 418 выполнен с возможностью передачи пускового перемещения от пускового штока 114 к концевому эффектору 120 (ФИГ. 1 и 2) через шарнирное сочленение 130 (ФИГ. 1 и 2). Гибкий пусковой стержень 418 включает в себя множество боковых участков 428a, 428b, 428c и 428d, которые выполнены с возможностью сдвига относительно друг друга при шарнирном повороте концевого эффектора 120. В таких примерах проксимальные концы участков 428a, 428b, 428c и 428d могут располагаться ступенчато.
Показанная лента 450 включает в себя первый конец 452, который присоединен к четвертому участку 428d, и второй конец 454, который присоединен к первому участку 428a. При сдвиге участков 428a, 428b, 428c, 428d относительно друг друга при шарнирном повороте концевого эффектора 120 лента 450 может растягиваться, приспосабливаясь к ступенчатой форме проксимальных концов участков 428a, 428b, 428c, 428d. Например, лента 450 может растягиваться при перемещении концевого эффектора 120 из шарнирно неповернутого положения (ФИГ. 9) в шарнирно повернутое положение (ФИГ. 10). В таких примерах лента 450 может продолжать растягиваться, в то время как участки 428a, 428b, 428c, 428d продолжают расходиться, располагаясь ступенчато, в ответ на шарнирный поворот концевого эффектора 120. Например, при увеличении угла шарнирного поворота концевого эффектора 120 участки 428a, 428b, 428c, 428d могут больше расходиться, располагаясь ступенчато, и лента 450 может больше растягиваться.
Как показано на ФИГ. 9 и 10, показанная лента 450 присоединена к наружным участкам 428a, 428d гибкого пускового стержня 418. Кроме того, лента 450 выполнена с возможностью прохождения вокруг проксимального конца 440 гибкого пускового стержня 418. Например, лента 450, показанная на ФИГ. 9 и 10, проходит вокруг проксимального конца 440 гибкого пускового стержня 418 и проходит позади проксимальных концов промежуточных или внутренних участков 428b и 428c.
В других примерах лента 450 может проходить вокруг периметра гибкого пускового стержня 418 проксимально по отношению к дистальному концу 440. В других примерах лента 450 может проходить между смежными боковыми участками гибкого пускового стержня 418, например такими как внутренние участки 428b и 428c. Дополнительно или альтернативно на гибком пусковом стержне 418 может быть установлено множество гибких лент.
В различных примерах гибкая лента 450 может включать в себя, например, электроактивный полимер. В таких примерах при растяжении гибкой ленты 450 электроактивный полимер может подавать сигнал, показывающий величину растяжения ленты и, следовательно, величину выноса пускового стержня. В других примерах лента 450 может быть выполнена из других электропроводных материалов, имеющих отличающиеся электрические характеристики, отражающие напряжение в ленте.
В различных примерах гибкая лента 450 может обмениваться сигналами с контроллером, который может быть выполнен с возможностью обнаружения угла шарнирного поворота на основании обратной связи от ленты 450. Например, напряжение в ленте 450 может представлять собой функцию величины угла шарнирного поворота концевого эффектора. Более конкретно, напряжение может соответствовать потенциалу, который может быть обнаружен контроллером. Например, при высоком напряжении в ленте 450, контроллер может обнаруживать больший потенциал, что соответствует большему углу шарнирного поворота концевого эффектора 120. Кроме того, если концевой эффектор 120 в меньшей степени шарнирно повернут относительно ствола 110, т. е. при редуцированном угле шарнирного поворота концевого эффектора 120, контроллер может обнаруживать пониженный потенциал, что соответствует пониженному напряжению в ленте 450. Регулирование длины пускового хода может зависеть от величины угла шарнирного поворота концевого эффектора 120 и может не зависеть от направления шарнирного поворота. Например, при шарнирном повороте концевого эффектора 120 на x° вправо или на x° влево, длина пускового хода может увеличиться на расстояние z.
Дополнительно или альтернативно контроллер может быть выполнен с возможностью регулирования длины пускового хода на основании обнаруженного выноса и/или смещений между участками 428a, 428b, 428c, 428d, которые используются для расчета и/или оценки величины угла шарнирного поворота концевого эффектора 120. В таких примерах контроллер выполнен с возможностью регулирования длины пускового хода таким образом, что гибкий пусковой стержень 418 достигает предварительно заданного самого дистального положения в концевом эффекторе 120, т. е. того же предварительно заданного самого дистального положения, которого достигает гибкий пусковой стержень 418, когда концевой эффектор находится в шарнирно неповернутом положении.
В различных примерах, по меньшей мере, один датчик на эффекте Холла, расположенный на гибком пусковом стержне, может быть выполнен с возможностью обнаружения сдвига боковых участков гибкого пускового стержня. На ФИГ. 11 и 12 система 550 обнаружения показана на проксимальном конце 540 гибкого пускового стержня 518. Аналогично гибкому пусковому стержню 118 (ФИГ. 1-7) гибкий пусковой стержень 518 выполнен с возможностью передачи пускового перемещения от пускового штока 114 к концевому эффектору 120 (ФИГ. 1 и 2) через шарнирное сочленение 130 (ФИГ. 1 и 2). Гибкий пусковой стержень 518 включает в себя множество боковых участков 528a, 528b, 528c и 528d, которые могут сдвигаться при шарнирном повороте концевого эффектора 120. В таких примерах проксимальные концы участков 528a, 528b, 528c и 528d располагаются ступенчато.
Показанная система 550 обнаружения включает в себя магнит 552 и датчик 554 на эффекте Холла. Магнит 552 и датчик 554 на эффекте Холла размещены на противоположных боковых сторонах гибкого пускового стержня 518. Например, магнит 552 может быть расположен на наружном участке гибкого пускового стержня 518, например таком как четвертый участок 528d, а датчик 554 на эффекте Холла может быть расположен на другом наружном участке гибкого пускового стержня 518, например таком как первый участок 528a.
При перемещении концевого эффектора 120 из шарнирно неповернутого положения (ФИГ. 11) в шарнирно повернутое положение (ФИГ. 12) боковые участки 528a, 528b, 528c, 528d гибкого пускового стержня 518 могут сдвигаться относительно друг друга. В результате может изменяться расстояние между магнитом 552 на наружном участке 528d и датчиком 554 на эффекте Холла на наружном участке 528a. Например, как показано на ФИГ. 11 и 12, магнит 552 и датчик 554 может разделять расстояние d, когда концевой эффектор находится в шарнирно неповернутом положении (ФИГ. 11), и их может разделять расстояние dʹ, которое больше расстояния d, когда концевой эффектор находится в шарнирно повернутом положении (ФИГ. 12).
В отдельных примерах система 550 обнаружения может дополнительно включать в себя электропроводную направляющую или скользящий контакт 556. Скользящий контакт 556 может быть выполнен с возможностью направления и/или защиты датчика 554 на эффекте Холла при сдвиге датчика 554 в стволе 110. В различных примерах скользящий контакт 556 может быть установлен на пусковом штоке 114 и/или сформирован на нем. Например, скользящий контакт 556 можно сформировать на поверхности пускового штока 114 и/или вдоль, по меньшей мере, участка отверстия 115.
В различных примерах скользящий контакт 556 может обеспечивать питание датчика 554 на эффекте Холла. Например, скользящий контакт 556 может быть связан с источником питания и датчиком 554 на эффекте Холла. В таких примерах датчик 554 на эффекте Холла может быть выполнен с возможностью сохранения контакта при скольжении со скользящим контактом 556 при перемещении концевого эффектора 120 из шарнирно неповернутого положения в шарнирно повернутое положение. Система 550 обнаружения может дополнительно включать в себя второй скользящий контакт, который может обеспечивать обратный путь от датчика 554 на эффекте Холла к остальной части цепи. Дополнительно или альтернативно в примерах, где магниту 552 необходимо питание, питание магнита 552 может обеспечиваться за счет пары скользящих контактов.
Величина угла шарнирного поворота концевого эффектора 120 может зависеть от выноса пускового стержня, обнаруженного системой 550 обнаружения. Более того, система 550 обнаружения может обмениваться данными с контроллером, который может регулировать длину пускового хода на основании величины выноса пускового стержня и соответствующего угла шарнирного поворота концевого эффектора. В таких примерах контроллер выполнен с возможностью регулирования длины пускового хода таким образом, что гибкий пусковой стержень 518 достигает предварительно заданного самого дистального положения в концевом эффекторе 120, т. е. того же предварительно заданного самого дистального положения, которого достигает гибкий пусковой стержень 518, когда концевой эффектор находится в шарнирно неповернутом положении.
На ФИГ. 13 и 14 показан гибкий пусковой стержень 618. В различных примерах гибкий пусковой стержень 618 выполнен, например, с возможностью использования в пусковой системе 112 хирургического инструмента 100 (ФИГ. 1). Гибкий пусковой стержень 618 включает в себя множество боковых участков 628a, 628b, 628c, 628d. Когда концевой эффектор 120 (ФИГ. 1) находится в шарнирно неповернутом положении относительно ствола 110, как преимущественно показано на ФИГ. 13, боковые участки 628a, 628b, 628c, 628d расходятся, располагаясь ступенчато, и/или сдвигаются относительно друг друга на проксимальном конце 640 пускового стержня 618. В различных примерах боковые участки 628a, 628b, 628c, 628d могут иметь различную длину. Например, внутренние участки 628b и 628c могут быть длиннее наружных участков 628a и 628d на расстояние x. В результате наружные участки 628a, 628d располагаются ступенчато относительно внутренних участков 628b, 628c на расстояние x.
Как преимущественно показано на ФИГ. 14, при шарнирном повороте концевого эффектора 120 (ФИГ. 1) относительно ствола 110 боковые участки 628a, 628b, 628c, 628d могут сдвигаться относительно друг друга. Например, проксимальные концы участков, расположенные ближе к внутренней кривизне, т. е. участки 628c и 628d на ФИГ. 14, могут сдвигаться проксимально относительно участков, расположенных ближе к наружной кривизне, т. е. участков 628a и 628b. В отдельных примерах четвертый участок 628d может, например, сдвигаться и совмещаться с третьим участком 628c и/или сдвигаться проксимально за третий участок 628c. Кроме того, участки, расположенные ближе к наружной кривизне, т. е. участки 628a и 628b на ФИГ. 14, могут сдвигаться дистально относительно участков, расположенных ближе к внутренней кривизне, т. е. участков 628c и 628d. В отдельных примерах второй участок 628c может, например, сдвигаться и выходить из совмещения с третьим участком 628b.
В отдельных примерах датчик может быть выполнен с возможностью обнаружения сдвига боковых участков 628a, 628b, 628c, 628d при шарнирном повороте концевого эффектора 120 (ФИГ. 1). Например, датчик приближения может быть расположен в стволе 110 для отслеживания и/или обнаружения изменяющихся положений проксимальных концов боковых участков 628a, 628b, 628c, 628d. Датчик может содержать, например, резистивный датчик, индуктивный датчик, емкостный датчик и/или магнитный датчик.
В различных примерах датчик может обмениваться данными с контроллером, который может быть выполнен с возможностью обнаружения угла шарнирного поворота концевого эффектора 120 на основании обратной связи от датчика. Дополнительно или альтернативно контроллер может быть выполнен с возможностью регулирования длины пускового хода на основании обнаруженного выноса и/или смещений между участками 628a, 628b, 628c, 628d, которые используются для расчета и/или оценки величины угла шарнирного поворота концевого эффектора. В таких примерах контроллер выполнен с возможностью регулирования длины пускового хода таким образом, что гибкий пусковой стержень 618 достигает предварительно заданного самого дистального положения в концевом эффекторе, т. е. того же предварительно заданного самого дистального положения, которого достигает гибкий пусковой стержень 618, когда концевой эффектор 120 находится в шарнирно неповернутом положении.
Как описано выше, пусковой стержень, проходящий в концевой эффектор через шарнирное сочленение, может изгибаться при шарнирном повороте концевого эффектора. В различных примерах электрическая цепь на гибком пусковом стержне может быть выполнена с возможностью обнаружения величины, на которую участки пускового стержня сдвигаются при изгибе пускового стержня во время шарнирного поворотного перемещения. Как показано на ФИГ. 15, гибкий пусковой стержень 718 может быть связан с пусковым штоком 114 в области сцепления 716. Аналогично гибкому пусковому стержню 118 (ФИГ. 1-7) гибкий пусковой стержень 718 выполнен с возможностью передачи пускового перемещения от пускового штока 114 к концевому эффектору 120 (ФИГ. 1) хирургического инструмента 100 через шарнирное сочленение 130 (ФИГ. 1 и 2). Гибкий пусковой стержень 718 включает в себя множество боковых участков 728a, 728b, 728c и 728d, которые выполнены с возможностью сдвига при шарнирном повороте концевого эффектора 120. В таких примерах проксимальные концы боковых участков 728a, 728b, 728c и 728d могут располагаться ступенчато.
На ФИГ. 15 показана система 750 обнаружения. Система 750 обнаружения включает в себя электрическую цепь, имеющую первый контакт 752 и второй контакт 754. Электрическая цепь может быть выполнена с возможностью обнаружения величины выноса пускового стержня при шарнирном повороте концевого эффектора 120 (ФИГ. 1). В различных примерах первый контакт 752 и второй контакт 754 могут быть установлены между двумя или более боковыми участками 728a, 728b, 728c, 728d пускового стержня 718. Например, первый контакт 752 может быть установлен на одном из боковых участков, например таком как первый участок 728a, и/или выполнен с ним как единое целое, а второй контакт 754 может быть установлен на смежном боковом участке, например таком как второй участок 728b, и/или выполнен с ним как единое целое.
Как показано на ФИГ. 15, контакты 752, 754 могут быть расположены на ключах 719 каждого из боковых участков 728a, 728b. В дополнение к указанному выше каждый ключ 719 может проходить в отверстие 115 в пусковом штоке 114. Зацепление пускового штока и ключа выполнено с возможностью передачи поступательного перемещения пускового штока 114 гибкому пусковому стержню 118. Например, при сдвиге первого участка 728a относительно второго участка 728b первый контакт 752 может перемещаться относительно второго контакта 754. Альтернативно второй контакт 754 может перемещаться относительно первого контакта 752 при перемещении второго участка 728b относительно первого участка 728a.
В различных примерах второй контакт 754 может содержать гибкую цепь, имеющую размер, который изменяется вдоль продольной оси. Например, гибкая цепь может формировать волнистые узоры. В различных примерах второй контакт 754 может содержать зубчатую и/или зацепляющую поверхность 766. Из поверхности 766 второго контакта 754 могут выступать ребра и/или зубцы 762, и/или в поверхности 766 второго контакта 754 могут быть сформированы канавки 764. В показанном варианте осуществления длина ребер 762 и канавок 764 меняется вдоль длины поверхности 766 с образованием волнистого узора. В результате поверхность 766 образует множество дискретных точек отличающихся размеров и/или длин. Как показано на ФИГ. 15, вокруг поверхности 766 второго контакта 754 может проходить изолированная область 758. В различных примерах первый контакт 752 может содержать край единичного контакта. Как показано на ФИГ. 15, изолированная область 756 может быть расположена на обеих сторонах первого контакта 752.
Как показано на ФИГ. 15, второй контакт 754 может быть связан с проводником 760b, который может соединять второй контакт 754 с остальной частью цепи. В различных примерах проводник, например такой как проводник 760a, может соединять первый контакт 752 с остальной частью цепи.
Например, в различных примерах система 750 обнаружения может включать в себя множество пар контактов, аналогичных контактам 752, 754. Например, контакт может быть расположен на одной или на обеих сторонах каждого ключа 719. В отдельных примерах система 750 обнаружения может дополнительно включать в себя электрический проводник, например такой как проводники 760a, 760b, 760c, 760d, которые могут проходить, например, к каждому боковому участку 728a, 728b, 728c, 728d соответственно. Проводники 760a, 760b, 760c, 760d могут быть выполнены с возможностью связывания электрического контакта на каждом боковом участке 728a, 728b, 728c, 728d с остальной частью цепи.
При сдвиге первого контакта 752 относительно второго электрического контакта 754 при шарнирном повороте концевого эффектора, как показано на ФИГ. 15, система 750 обнаружения может обнаруживать изменение емкости. Изменяющаяся длина ребер 762 и канавок 764 вдоль поверхности 766 второго контакта 754 могут влиять на изменение емкости между двумя контактами 752, 754. Например, емкость может быть самой большей, когда первый контакт 752 совмещается с самым длинным ребром 762 второго контакта 754. В различных примерах первый контакт 752 может совмещаться с самым длинным ребром 762 второго контакта 754, когда концевой эффектор 120 находится в шарнирно неповернутом положении. При шарнирном повороте концевого эффектора 120 и сдвиге боковых участков первый контакт 752 может перемещаться от самого длинного ребра 762 и совмещаться с более коротким ребром 762. В таких примерах емкость в системе 750 обнаружения может уменьшаться при шарнирном повороте концевого эффектора.
В отдельных примерах, как показано на ФИГ. 16, емкость может снижаться в диапазоне шарнирного поворота концевого эффектора от шарнирно неповернутого положения до шарнирно повернутого положения. Более конкретно, емкость может снижаться при шарнирном повороте концевого эффектора вправо из шарнирно неповернутого или менее шарнирно повернутого положения. Аналогично емкость может снижаться при шарнирном повороте концевого эффектора влево из шарнирно неповернутого или менее шарнирно повернутого положения. Кроме того, емкость может возрастать при перемещении концевого эффектора из шарнирно повернутого положения к шарнирно неповернутому положению.
В различных примерах один или оба контакта 752, 754 могут формировать альтернативную геометрическую форму. В отдельных примерах контакты 752, 754 могут содержать плоские поверхности, выполненные с возможностью сдвига для совмещения и/или выхода из совмещения при шарнирном повороте концевого эффектора 120. В таких примерах изменяющееся совмещение и/или перекрытие между плоскими поверхностями может соответствовать изменению емкости. Например, емкость может быть самой большей при наиболее полном совмещении между плоскими контактами. В других примерах один из контактов 752, 754 может содержать, например, плоскую поверхность.
В различных примерах система 750 обнаружения может обмениваться данными с контроллером, который может быть выполнен с возможностью обнаружения угла шарнирного поворота концевого эффектора 120 на основании обратной связи от датчика 754. Дополнительно или альтернативно контроллер может быть выполнен с возможностью регулирования длины пускового хода на основании обнаруженного выноса и/или смещений между участками 728a, 728b, 728c, 728d, которые используются для расчета и/или оценки величины угла шарнирного поворота концевого эффектора. В таких примерах контроллер выполнен с возможностью регулирования длины пускового хода таким образом, что гибкий пусковой стержень 718 достигает предварительно заданного самого дистального положения в концевом эффекторе 120, т. е. того же предварительно заданного самого дистального положения, которого достигает гибкий пусковой стержень 718, когда концевой эффектор 120 находится в шарнирно неповернутом положении. Регулирование длины пускового хода может зависеть от величины угла шарнирного поворота концевого эффектора 120 и может не зависеть от направления шарнирного поворота. Например, при шарнирном повороте концевого эффектора 120 на x° вправо или на x° влево, длина пускового хода может увеличиться на расстояние z.
В отдельных примерах система обнаружения может включать в себя, по меньшей мере, один поворотный энкодер, который может быть выполнен с возможностью обнаружения линейного перемещения гибкого пускового стержня. На ФИГ. 17 показана система 850 обнаружения. Система 850 обнаружения включает в себя поворотные энкодеры 852 и 854. Поворотные энкодеры 852 и 854 расположены смежно с гибким пусковым стержнем 818. Аналогично гибкому пусковому стержню 118 (ФИГ. 1-7) гибкий пусковой стержень 818 выполнен с возможностью передачи пускового перемещения от пускового штока 114 к концевому эффектору 120 (ФИГ. 1) хирургического инструмента 100 через шарнирное сочленение 130 (ФИГ. 1 и 2). Гибкий пусковой стержень 818 включает в себя множество боковых участков 828a, 828b, 828c и 828d, которые могут сдвигаться относительно друг друга при шарнирном повороте концевого эффектора 120 таким образом, что проксимальные концы боковых участков 828a, 828b, 828c и 828d расходятся, располагаясь ступенчато.
В различных примерах поворотный (-ые) энкодер (-ы) 852, 854 может (могут) быть выполнен (-ы) с возможностью обнаружения линейного смещения гибкого пускового стержня 818 и/или его участков 828a, 828b, 828c и 828d. Например, при шарнирном повороте концевого эффектора 120, по меньшей мере, один поворотный энкодер 852, 854 может обнаруживать смещение гибкого пускового стержня 818 во время шарнирного поворотного перемещения.
В различных примерах, как показано на ФИГ. 17, поворотный энкодер 852, 854 может быть расположен на каждой стороне гибкого пускового стержня 818 и может обнаруживать смещение наружных участков 828a и 828d. Например, первый поворотный энкодер 852 может обнаруживать линейное смещение четвертого бокового участка 828d, а второй поворотный энкодер 854 может обнаруживать линейное смещение первого бокового участка 828a. На основании разности между линейным смещением наружных участков 828a, 828d можно определить величину общего ступенчатого расхождения между боковыми участками пускового стержня 818, которая может соответствовать величине угла шарнирного поворота концевого эффектора 120.
Дополнительно или альтернативно система 850 обнаружения может быть выполнена с возможностью обнаружения линейного смещения гибкого пускового стержня 818 во время пускового хода. Система 850 обнаружения может быть расположена, например, на и/или вблизи от дистального участка ствола 110 и/или дистально относительно шарнирного сочленения 130 (ФИГ. 1 и 2). В других примерах система 850 обнаружения может быть расположена, например, на и/или вблизи от проксимального участка ствола 110 и/или проксимально относительно шарнирного сочленения 130.
В различных примерах поворотные энкодеры 852, 854 могут быть выполнены с возможностью направления гибкого пускового стержня 818 при шарнирном повороте концевого эффектора 120 и/или при выдвижении пускового стержня 818 дистально во время пускового хода. Например, поворотные энкодеры 852, 854 могут препятствовать и/или ограничивать изгиб и/или деформацию гибкого пускового стержня 818. Поворотные энкодеры 852, 854 расположены на противоположных сторонах пускового стержня 818 и могут прилагать к нему силу сжатия, которая препятствует перемещению в боковом направлении между боковыми участками пускового стержня 818.
В различных примерах система 850 обнаружения может обмениваться данными с контроллером, который может быть выполнен с возможностью обнаружения угла шарнирного поворота концевого эффектора 120 на основании обратной связи от энкодеров 852, 854. Дополнительно или альтернативно контроллер может быть выполнен с возможностью регулирования длины пускового хода пускового стержня 818 на основании обнаруженного выноса и/или смещений между участками 828a, 828b, 828c, 828d, которые используются для расчета и/или оценки величины угла шарнирного поворота концевого эффектора 120. В таких примерах контроллер выполнен с возможностью регулирования длины пускового хода таким образом, что гибкий пусковой стержень 818 достигает предварительно заданного самого дистального положения в концевом эффекторе 120, т. е. того же предварительно заданного самого дистального положения, которого достигает гибкий пусковой стержень 818, когда концевой эффектор 120 находится в шарнирно неповернутом положении.
В отдельных примерах система обнаружения может включать в себя, например, лазер, который может быть выполнен с возможностью обнаружения сдвига и/или выноса боковых участков гибкого пускового стержня. На ФИГ. 18 показаны система 950 обнаружения и гибкий пусковой стержень 918. В различных примерах гибкий пусковой стержень 918 может быть связан с пусковым штоком, например таким как пусковой шток 114, и может использоваться в пусковой системе 112 хирургического инструмента 100 (ФИГ. 1). Как показано на ФИГ. 18, гибкий пусковой стержень 918 включает в себя множество боковых участков, которые сдвигаются относительно друг друга при шарнирном повороте концевого эффектора 120 (ФИГ. 1).
Как показано на ФИГ. 18, в боковых участках гибкого пускового стержня 918 сформировано множество отверстий 956. Отверстия 956 содержат круглые отверстия, например сформированные насквозь в боковых участках. В других примерах отверстия могут иметь, например, удлиненную и/или многоугольную геометрическую форму. Когда концевой эффектор 120 находится в шарнирно неповернутом положении, отверстия 956 в боковом участке совмещаются с отверстиями 956 в смежных боковых участках. При сдвиге боковых участков гибкого пускового стержня 918 относительно друг друга при шарнирном повороте концевого эффектора 120 могут сдвигаться отверстия 956, сформированные насквозь в каждом боковом участке. В различных примерах отверстия 956 могут сдвигаться, совмещаясь с отверстиями 956 в других боковых участках и/или выходя из совмещения с ними. В отдельных примерах отверстия 956 выполнены с возможностью совмещения, когда концевой эффектор 120 находится в шарнирно неповернутом положении, и могут выходить из совмещения во время шарнирного поворотного перемещения, тогда как в других примерах отверстия 956 выполнены с возможностью совмещения, когда концевой эффектор 120 находится в полностью шарнирно повернутом положении.
Система 950 обнаружения, показанная на ФИГ. 18, включает в себя оптический лазер 952. Оптический лазер 952 может быть связан с оптическим каналом или световодом 954, который может проходить через ствол 110, и, например, может проходить к рукоятке хирургического инструмента 100. В различных примерах оптический лазер 952 может быть выполнен с возможностью генерирования лазерного луча и/или множества лазерных лучей. Система 950 обнаружения может дополнительно содержать приемник, выполненный с возможностью обнаружения лазерного (-ых) луча (-ей). Если отверстия 956 совмещены друг с другом, лазерный (-ые) луч (-и) может (могут) передаваться через боковые участки без его (их) блокировки боковыми участками. Если отверстия 956 лишь частично совмещены друг с другом, боковые участки могут частично блокировать лазерный (-ые) луч (-и). Если отверстия 956 не совмещены друг с другом, боковые участки могут полностью блокировать лазерный (-ые) луч (-и). Лазерный сигнал, полученный приемником, может соответствовать сдвигу совмещения отверстий, который может соответствовать сдвигу боковых участков гибкого пускового стержня 918.
В различных случаях система 950 обнаружения может обмениваться данными с контроллером. Контроллер может быть выполнен с возможностью обнаружения угла шарнирного поворота концевого эффектора 120 на основании обратной связи от системы 950 обнаружения. Дополнительно или альтернативно контроллер может быть выполнен с возможностью регулирования длины пускового хода на основании расчетной и/или предполагаемой величины угла шарнирного поворота концевого эффектора на основании обнаруженного выноса и/или смещений между боковыми участками. В таких примерах контроллер выполнен с возможностью регулирования длины пускового хода таким образом, что гибкий пусковой стержень 918 достигает предварительно заданного самого дистального положения в концевом эффекторе 120, т. е. того же предварительно заданного самого дистального положения, которого достигает гибкий пусковой стержень 918, когда концевой эффектор 120 находится в шарнирно неповернутом положении.
Принимая во внимание различные системы обнаружения, описанные в настоящем документе, например такие как системы 250, 350, 550, 650, 750, 850 и 950 обнаружения, а также ленту 450, контроллер может обмениваться данными с системой обнаружения и может регулировать длину пускового хода на основании обратной связи от системы обнаружения. Например, когда система обнаружения обнаруживает величину угла шарнирного поворота концевого эффектора, длина пускового хода может быть увеличена с учетом величины угла шарнирного поворота. В различных примерах чем больше величина угла шарнирного поворота концевого эффектора, обнаруживаемого системой обнаружения, тем больше может быть значение длины пускового хода. Регулирование длины пускового хода может зависеть от величины угла шарнирного поворота концевого эффектора и может не зависеть от направления шарнирного поворота. В различных примерах контроллер может включать в себя и/или обмениваться данными с микропроцессором, имеющим таблицу преобразования. Такая таблица преобразования может быть неотъемлемой частью процессора и/или процессор может получать к ней доступ. Таблица преобразования может храниться, например, в виртуальной памяти или физической памяти. Таблица преобразования может включать в себя величину регулирования пускового хода для конкретных углов шарнирного поворота и/или для конкретных величин выноса пускового стержня. Например, для данной величины ступенчатого расхождения между боковыми участками гибкого пускового стержня таблица преобразования указывает приемлемую длину регулирования пускового хода.
Как описано в настоящем документе, в отдельных примерах для определения величины угла шарнирного поворота концевого эффектора может быть желательно отслеживать линейное смещение гибкого пускового стержня и/или сдвиг его боковых участков. Кроме того, длину пускового хода пускового стержня можно регулировать с учетом изменяющегося положения гибкого пускового стержня и/или его положений при шарнирном повороте концевого эффектора. Дополнительно или альтернативно может быть желательно обеспечить смягчающий элемент, который выполнен с возможностью амортизации и/или иного приспосабливания к изменениям длины пускового хода. Такой смягчающий элемент может, например, располагаться в стволе и/или концевом эффекторе хирургического инструмента.
При отсутствии регулирования длины пускового хода с учетом угла шарнирного поворота концевого эффектора гибкий пусковой стержень будет проходить дальше дистально на заданную длину пускового хода, когда концевой эффектор находится в шарнирно неповернутом положении, чем когда концевой эффектор шарнирно повернут. Самое дистальное положение гибкого пускового стержня во время пускового хода будет меняться при изменениях угла шарнирного поворота. Например, при заданной длине пускового хода гибкий пусковой стержень будет останавливаться в более проксимальном самом дистальном положении, когда концевой эффектор шарнирно повернут, чем когда концевой эффектор находится в шарнирно неповернутом положении. Кроме того, при заданной длине пускового хода гибкий пусковой стержень будет останавливаться в более дистальном самом дистальном положении, когда концевой эффектор шарнирно повернут в меньшей степени, чем когда концевой эффектор шарнирно повернут в большей степени.
Для обеспечения достижения заданных самых дистальных положений внутри концевого эффектора, по меньшей мере, гибким пусковым стержнем, салазками для размещения скоб и/или режущим краем, даже если концевой эффектор полностью шарнирно повернут, длину пускового хода можно выбирать таким образом, чтобы гибкий пусковой стержень проходил в желаемое самое дистальное положение, когда концевой эффектор полностью шарнирно повернут. В результате, когда концевой эффектор частично шарнирно повернут или находится в шарнирно неповернутом положении, гибкий пусковой стержень будет проходить дистально за пределы желаемого самого дистального положения. В таких примерах салазки для размещения скоб и/или другие элементы пусковой системы могут сталкиваться с дистальной торцевой стенкой кассеты со скобами. Для снижения воздействия и/или, по меньшей мере, частичной амортизации удара при столкновении смягчающий элемент может взаимодействовать с пусковой системой.
В различных примерах смягчающий элемент выполнен с возможностью расположения в стволе хирургического инструмента. Например, смягчающий элемент может быть расположен в области сцепления между пусковым штоком и гибким пусковым стержнем. Такой смягчающий элемент может быть выполнен с возможностью амортизации и/или приспосабливания к изменениям длины пускового хода при перемещении концевого эффектора хирургического инструмента в шарнирно повернутое положение. Например, смягчающий элемент может быть выполнен из гибкого, поддающегося деформации и/или эластичного материала.
На ФИГ. 19 показано поддающееся деформации смягчающее соединение 1050. В показанном варианте осуществления гибкий пусковой стержень 1018 связан с пусковым штоком 114 в области сцепления 1016 в стволе 110 хирургического инструмента 100 (ФИГ. 1). Аналогично гибкому пусковому стержню 118 (см., например, ФИГ. 1-7) гибкий пусковой стержень 1018 выполнен с возможностью передачи пускового перемещения от пускового штока 114 к концевому эффектору 120 (ФИГ. 1) через шарнирное сочленение 130 (ФИГ. 1 и 2).
В показанном варианте осуществления элемент компенсации хода или смягчающее соединение 1050 расположено в области сцепления 1016 между пусковым штоком 114 и проксимальным концевым участком 1040 гибкого пускового стержня 1018. Смягчающее соединение 1050 может быть выполнено с возможностью деформации при продвижении и/или смещении проксимального конца 1040 гибкого пускового стержня 1018 проксимально. Например, при шарнирном повороте концевого эффектора 120 проксимальный конец 1040 гибкого пускового стержня 1018 и/или его участки могут смещаться проксимально. При перемещении гибкого пускового стержня 1018 проксимально проксимальный конец 1040 может сжимать смягчающее соединение 1050.
В различных примерах смягчающее соединение 1050 может быть выполнено из гибкого, поддающегося деформации и/или эластичного материала. Например, смягчающее соединение 1050 может быть выполнено из материала, имеющего более низкую твердость по дюрометру, чем гибкий пусковой стержень 1018 и/или его проксимальный конец 1040. Дополнительно или альтернативно смягчающее соединение 1050 может быть выполнено из материала, имеющего более низкую твердость по дюрометру, чем пусковой шток 114.
Как преимущественно показано на ФИГ. 19, смягчающее соединение 1050 включает в себя сужающееся приемное гнездо 1052, которое может быть выполнено с возможностью приема проксимального конца 1040 гибкого пускового стержня 1018. Сужающееся приемное гнездо 1052 может, например, образовывать коническую форму. В таких примерах сужающееся приемное гнездо 1052 может сужаться от более широкого отверстия в дистальной области приемного гнезда 1052 к более узкому отверстию в промежуточной области приемного гнезда 1052. Приемное гнездо 1052 может быть закрытым в проксимальной области. В отдельных примерах сужающееся приемное гнездо 1052 может выступать в качестве тормоза, который может сначала замедлять и/или сопротивляться проксимальному смещению гибкого пускового стержня 1018 (ФИГ. 20). Кроме того, при сжатии сужающегося приемного гнезда 1052 под действием пускового стержня 1018 приемное гнездо 1052 может останавливать и/или предотвращать дополнительное проксимальное смещение гибкого пускового стержня 1018 (ФИГ. 21).
В отдельных примерах гибкий пусковой стержень 1018 может включать в себя множество боковых участков 1028a, 1028b, 1028c и 1028d. Как показано на ФИГ. 19-21, боковые участки 1028a, 1028b, 1028c и 1028d могут быть закреплены и/или связаны вместе, например, на проксимальном конце 1040 гибкого пускового стержня 1018. В таких примерах боковые участки 1028a, 1028b, 1028c и 1028d могут быть выполнены с возможностью совместного перемещения на проксимальном конце 1040, как показано на ФИГ. 19-21. В других примерах боковые участки 1028a, 1028b, 1028c и 1028d могут сдвигаться при шарнирном повороте концевого эффектора 120 таким образом, что проксимальные концы боковых участков 1028a, 1028b, 1028c и 1028d расходятся, располагаясь ступенчато. В таких примерах смягчающее соединение 1050 может быть выполнено с возможностью амортизации и/или приспосабливания к ступенчатому смещению боковых участков 1028a, 1028b, 1028c и 1028d.
Как описано в настоящем документе, в отдельных примерах пусковой ход можно регулировать и/или изменять таким образом, что гибкий пусковой стержень 1018 достигает предварительно заданного самого дистального положения в концевом эффекторе 120, когда концевой эффектор 120 полностью шарнирно повернут. В отдельных примерах пусковой ход можно регулировать и/или изменять независимо от величины угла шарнирного поворота концевого эффектора 120. В таких примерах гибкий пусковой стержень 1018 может быть выполнен с возможностью выдвижения дистально за пределы предварительно заданного самого дистального положения в концевом эффекторе 120, когда концевой эффектор 120 лишь частично шарнирно повернут и/или находится в шарнирно неповернутом положении. Кроме того, когда концевой эффектор 120 лишь частично шарнирно повернут и/или находится в шарнирно неповернутом положении, гибкий пусковой стержень 1018 может перемещать салазки дистально в упор к дистальному концу концевого эффектора 120 во время пускового перемещения. В таких примерах смягчающее соединение 1010 может, по меньшей мере, частично амортизировать удар при столкновении между салазками и дистальным концом концевого эффектора 120.
В дополнение к указанному выше смягчающее соединение 1050 может быть выполнено из эластичного материала, который может сжиматься и/или амортизировать и/или приспосабливаться к проксимальному смещению гибкого пускового стержня 1018. В отдельных примерах смягчающее соединение 1050 может содержать, например, пружину и/или пружинный элемент. Дополнительно или альтернативно смягчающее соединение 1050 может содержать фрикционный скользящий элемент, например такой как муфта и/или компенсатор.
Как описано выше, смягчающее соединение 1050 может быть расположено на проксимальном конце 1040 гибкого пускового стержня 1018. Дополнительно или альтернативно смягчающий элемент может быть расположен на дистальном конце гибкого пускового стержня 1018. Например, такой смягчающий элемент может быть расположен между дистальным концом гибкого пускового стержня 1018 и салазками и/или пусковым элементом в концевом эффекторе 120 (ФИГ. 1).
На ФИГ. 22 показан элемент регулирования хода или смягчающий элемент 1150. Смягчающий элемент 1150 расположен дистально относительно дистального конца 1140 гибкого пускового стержня 1118. Аналогично гибкому пусковому стержню 118 (ФИГ. 1-7) гибкий пусковой стержень 1118 может быть выполнен с возможностью передачи пускового перемещения от пускового штока 114 (см., например, ФИГ. 1 и 3) к концевому эффектору, например такому как концевой эффектор 1120, через шарнирное сочленение 130 (ФИГ. 1 и 2). На ФИГ. 22 показан дистальный конец 1140 гибкого пускового стержня 1118, который связан с пусковым элементом 1154.
Как показано на ФИГ. 22, пусковой элемент 1154 выполнен с возможностью скольжения и/или перемещения вдоль, по меньшей мере, части продольного паза 1152, сформированного в кассете 1122 со скобами. Пусковой элемент 1154 включает в себя режущий край 1156, который выполнен с возможностью рассечения ткани, прижатой к кассете 1122 со скобами упором концевого эффектора 1120. Во время пускового хода при дистальном смещении гибкого пускового стержня 1118 режущий элемент 1154 может перемещаться дистально для разрезания ткани.
Как показано на ФИГ. 22, салазки или клин 1158 для размещения скоб могут быть расположены в кассете 1122 со скобами с возможностью перемещения. Например, салазки 1158 могут включать в себя промежуточный участок 1159, который выполнен с возможностью скольжения вдоль, по меньшей мере, части продольного паза 1152. В различных примерах салазки 1158 могут дополнительно включать в себя множество приводных клиньев, которые могут быть выполнены с возможностью взаимодействия со скобами и/или выталкивателями скоб для выталкивания скоб из полостей 1126 для скоб и перемещения скоб к упору концевого эффектора 1120.
Смягчающий элемент 1150 расположен между пусковым элементом 1154 и салазками 1158. По меньшей мере, в одном примере смягчающий элемент 1150 может быть связан с салазками 1158 с помощью шпунтового соединения. Как показано на ФИГ. 22, смягчающий элемент 1150 включает в себя шпунт 1162, а салазки 1158 включают в себя канавку 1164, которая выполнена с возможностью приема и удерживания шпунта 1162. Например, шпунт 1162 может быть прикреплен с помощью посадки трением и/или может иным образом удерживаться в канавке 1164.
В отдельных примерах смягчающий элемент 1150 может быть выполнен за одно целое с салазками 1158. В различных примерах смягчающий элемент 1150 изначально может быть расположен на проксимальном конце кассеты 1122 со скобами и может перемещаться дистально, например по мере того как пусковой элемент 1154 продвигает салазки 1158 во время пускового хода. В некоторых примерах пусковой элемент 1154 может приводить смягчающий элемент 1150 в движение для зацепления с салазками 1154 во время пускового хода. В отдельных примерах смягчающий элемент 1150 может быть, например, связан с пусковым элементом 1154. В других примерах смягчающий элемент 1150 может быть выполнен с возможностью свободного перемещения внутри продольного паза 1152. Например, смягчающий элемент 1150 может быть расположен между пусковым элементом 1154 и салазками 1158, однако смягчающий элемент 1150 может быть, например, не связан ни с пусковым элементом 1154, ни с салазками 1158.
В различных примерах смягчающий элемент 1150 может быть выполнен из гибкого, поддающегося деформации и/или эластичного материала. Например, смягчающий элемент 1150 может быть выполнен из материала, имеющего более низкую твердость по дюрометру, чем гибкий пусковой элемент 1154 и/или салазки 1158. В таких примерах смягчающий элемент 1150 может быть выполнен с возможностью, по меньшей мере, частичной амортизации и/или приспосабливания к дистальному поступательному перемещению и/или смещению пускового элемента 1154. Например, смягчающий элемент 1150 может выступать в качестве мягкого ограничителя и/или тормоза. В таких примерах смягчающий элемент 1150 может сначала замедлять и/или сопротивляться дистальному смещению пускового элемента 1154. Кроме того, если пусковой элемент 1154 продолжает выдвижение дистально, смягчающий элемент 1150 может останавливать и/или предотвращать дальнейшее дистальное смещение пускового элемента 1154. Как описано в настоящем документе, в различных примерах гибкий пусковой стержень 1118 может быть выполнен с возможностью выдвижения дистально за пределы предварительно заданного самого дистального положения в концевом эффекторе 120, когда концевой эффектор 120 лишь частично шарнирно повернут и/или находится в шарнирно неповернутом положении. Кроме того, когда концевой эффектор 120 лишь частично шарнирно повернут и/или находится в шарнирно неповернутом положении, гибкий пусковой стержень 1118 может перемещать салазки 1158 дистально в упор к дистальному концу концевого эффектора 120 во время пускового перемещения. В таких примерах смягчающий элемент 1150 может, по меньшей мере, частично амортизировать удар при столкновении между салазками 1158 и дистальным концом концевого эффектора 120.
Как показано на примере варианта осуществления на ФИГ. 22, смягчающий элемент 1150 включает в себя сужающееся приемное гнездо 1166, которое может быть выполнено с возможностью приема дистального конца пускового элемента 1154. В различных примерах сужающееся приемное гнездо 1166 может образовывать заостренную и/или конусообразную форму. Например, сужающееся приемное гнездо 1166 может сужаться от более широкого отверстия в проксимальной области приемного гнезда 1166 к более узкому отверстию в промежуточной области приемного гнезда 1166. Дистальная область приемного гнезда 1166 может быть закрытой. В отдельных примерах сужающееся приемное гнездо 1166 может выступать в качестве тормоза, который сначала замедляет и/или сопротивляется дистальному смещению пускового элемента 1154 и может, например, окончательно останавливать и/или предотвращать дальнейшее дистальное смещение пускового элемента 1154.
В различных примерах кассета 1122 со скобами может содержать ограничитель 1160 ткани, который может совмещаться с режущим краем 1156 пускового элемента 1154. В различных вариантах режущий край 1156 может быть выполнен с возможностью взаимодействия с ограничителем 1160 разрезания и может облегчать сброс и/или поглощение энергии во время пускового хода. В отдельных примерах ограничитель 1160 ткани может проходить от платформы 1124 и покрывать и/или блокировать, по меньшей мере, часть продольного паза 1152. В отдельных примерах ограничитель 1160 ткани может быть выполнен из гибкого, поддающегося деформации и/или эластичного материала. Дополнительно или альтернативно ограничитель 1160 ткани может быть хрупким. В других примерах ограничитель 1160 ткани может выступать в качестве жесткого ограничителя, предотвращающего дальнейшее дистальное смещение режущего края 1156. Полное описание заявки на патент США № 14/512,637, озаглавленной STAPLE CARTRIDGE, поданной 13 октября 2014 г., включено в настоящий документ путем ссылки.
В отдельных примерах ограничитель пускового стержня может быть встроен в концевой эффектор и/или ствол хирургического инструмента. Ограничитель пускового стержня может быть выполнен с возможностью ограничения перемещения пускового стержня во время пускового хода. Например, ограничитель пускового стержня может включать в себя захват или замок, расположенный в концевом эффекторе и/или стволе и имеющий конструкцию и расположение для зацепления гибкого пускового стержня во время пускового хода. Такой замок может взаимодействовать с пусковым стержнем во время части пускового хода для обеспечения удержания и/или предотвращения дальнейшего дистального перемещения пускового стержня. В отдельных примерах ограничитель пускового стержня может быть выполнен с возможностью сдвига относительно ствола и/или концевого эффектора при перемещении концевого эффектора в шарнирно повернутое положение относительно ствола. Сдвинутое положение пускового стержня может зависеть от величины угла шарнирного поворота концевого эффектора. В результате ограничитель пускового стержня может взаимодействовать с гибким пусковым стержнем и удерживать его в различных положениях относительно ствола, и положение может быть основано на величине угла шарнирного поворота концевого эффектора.
Ограничитель 1658 пускового стержня показан в хирургическом инструменте 1600, показанном на ФИГ. 49-53. Хирургический инструмент 1600 может быть во многих аспектах аналогичен хирургическому инструменту 100 (ФИГ. 1). Хирургический инструмент 1600 включает в себя концевой эффектор 1620, связанный со стволом 1610 с возможностью вращения вокруг шарнирного сочленения 1630. Кассета 1622 со скобами (ФИГ. 49) может быть расположена в концевом эффекторе 1620. Во время пускового хода гибкий пусковой стержень 1618 выполнен с возможностью перемещения внутри ствола 1610, шарнирного сочленения 1630 и концевого эффектора 1620 для выдвижения пускового элемента 1654 (ФИГ. 49) дистально. Пусковой элемент 1654 включает в себя режущий край 1656 (ФИГ. 49). В отдельных примерах пусковой элемент 1654 может выдвигать салазки для размещения скоб, которые могут выталкивать скобы из кассеты 1622 со скобами и могут перемещать скобы, обеспечивая контакт с упором 1624 (ФИГ. 49, 51 и 53) концевого эффектора 1620 для их формирования.
При заданной длине пускового хода гибкий пусковой стержень 1618 будет проходить дистально дальше, когда концевой эффектор 1620 находится в шарнирно неповернутом положении, чем когда концевой эффектор 1620 шарнирно повернут, как описано в настоящем документе. Более того, самое дистальное положение гибкого пускового стержня 1618 будет меняться при изменении угла шарнирного поворота. Другими словами, при заданной длине пускового хода гибкий пусковой стержень 1618 будет останавливаться в более проксимальном самом дистальном положении, когда концевой эффектор 1620 шарнирно повернут, чем когда концевой эффектор 1620 находится в шарнирно неповернутом положении. Кроме того, при заданной длине пускового хода гибкий пусковой стержень 1618 будет останавливаться в более дистальном самом дистальном положении, когда концевой эффектор 1620 шарнирно повернут в меньшей степени, чем когда концевой эффектор 1620 шарнирно повернут в большей степени.
Для обеспечения достижения гибким пусковым стержнем 1618, салазками для размещения скоб и/или режущим краем 1656 (ФИГ. 49), по меньшей мере, заданных самых дистальных положений внутри концевого эффектора 1620, когда концевой эффектор 1620 находится в шарнирно повернутом положении, длину пускового хода можно выбирать таким образом, чтобы гибкий пусковой стержень 1618 проходил дистально в желаемое самое дистальное положение, когда концевой эффектор 1620 полностью шарнирно повернут. В таких примерах для предотвращения столкновения салазок для размещения скоб и/или других элементов пусковой системы с дистальной торцевой стенкой кассеты 1622 со скобами, когда концевой эффектор 1620 не полностью шарнирно повернут, может использоваться ограничитель пускового стержня, например такой как ограничитель 1658 пускового стержня.
Ограничитель 1658 пускового стержня может быть выполнен с возможностью взаимодействия с гибким пусковым стержнем 1618 для ограничения дальнейшего дистального смещения пускового стержня 1618 во время пускового хода. В отдельных примерах ограничитель 1658 пускового стержня может взаимодействовать с гибким пусковым стержнем 1618 во время дистального участка пускового хода. Ограничитель 1658 пускового стержня может быть выполнен с возможностью сдвига на основании величины угла шарнирного поворота концевого эффектора 1620. Другими словами, ограничитель 1658 пускового стержня может взаимодействовать с гибким пусковым стержнем 1618 в различных положениях во время пускового хода в зависимости от величины угла шарнирного поворота концевого эффектора 1620. Ограничитель 1658 пускового стержня может формировать смягчающий элемент, который приспосабливается к избыточному ходу гибкого пускового стержня.
Ограничитель 1658 пускового стержня может быть выполнен с возможностью учета изменения расстояния до желаемого самого дистального положения в концевом эффекторе 1620. Более конкретно, ограничитель 1658 пускового стержня может быть выполнен с возможностью взаимодействия с гибким пусковым стержнем 1618 и удерживания его в более дистальном положении, когда концевой эффектор 1620 находится в шарнирно неповернутом положении, и может быть выполнен с возможностью взаимодействия с гибким пусковым стержнем 1618 и удерживания его в более проксимальном положении, когда концевой эффектор 1620 шарнирно повернут. В различных примерах длину пускового хода можно выбирать таким образом, что гибкий пусковой стержень 1618 достигает желаемого самого дистального положения, когда концевой эффектор 1620 полностью шарнирно повернут. В таких примерах ограничитель 1658 пускового стержня может быть выполнен с возможностью предотвращения столкновения салазок для размещения скоб и/или других элементов пусковой системы с дистальной торцевой стенкой кассеты 1622 со скобами, когда концевой эффектор 1620 не полностью шарнирно повернут.
Ограничитель 1658 пускового стержня, показанный на ФИГ. 49-53, включает в себя перемещающийся фиксатор 1660 и захват 1662 на гибком пусковом стержне 1618. Захват 1662 формирует выемку в гибком пусковом стержне 1618, а перемещающийся фиксатор 1660 выполнен с возможностью взаимодействия с захватом 1662 во время части пускового хода. Например, перемещающийся фиксатор 1660 может перемещаться в упор к выемке 1662 в гибком пусковом стержне 1618 при поступательном перемещении гибкого пускового стержня 1618 во время пускового хода. Упор захвата 1662 и перемещающегося фиксатора 1660 выполнен с возможностью предотвращения дальнейшего дистального смещения гибкого пускового стержня 1618.
Ограничитель 1658 пускового стержня также включает в себя пластину 1670, находящуюся в зацеплении с перемещающимся фиксатором 1660. Пластина 1670 может образовывать такую геометрическую форму, что шарнирный поворот пластины 1670 вызывает сдвиг перемещающегося фиксатора 1660. Например, пластина 1670 включает в себя пару лепестков 1672 и углубление 1674 между лепестками 1672. Пластина 1670 может быть выполнена с возможностью перемещения вместе с концевым эффектором 1620. Как преимущественно показано на ФИГ. 50 и 52, пластина 1620 может быть присоединена к концевому эффектору 1620, например, с помощью, по меньшей мере, одного штифта 1676. Пластина 1670 может поворачиваться вместе с концевым эффектором 1620 при перемещении концевого эффектора 1620 в шарнирно повернутое положение относительно ствола 1610. В результате пластина 1670 может поворачиваться относительно перемещающегося фиксатора 1660, расположенного внутри ствола 1610 хирургического инструмента 1600.
Когда концевой эффектор 1620 находится в шарнирно неповернутом положении (ФИГ. 49-51), углубление 1764 пластины 1670 может взаимодействовать с перемещающимся фиксатором 1670. В результате перемещающийся фиксатор 1670 может быть расположен в дистальном положении относительно ствола 1610. Пружина 1664 в стволе 1610 может быть выполнена с возможностью смещения перемещающегося фиксатора в дистальное положение. Более того, при шарнирном повороте концевого эффектора 1620 и повороте пластины 1670 (ФИГ. 52 и 53) лепесток 1672 пластины 1670 может взаимодействовать с перемещающимся фиксатором 1660. В таких примерах перемещающийся фиксатор 1660 может быть расположен в более проксимальном положении относительно ствола 1610. Пружина 1664 выполнена с возможностью деформации для приспосабливания к проксимальному сдвигу перемещающегося фиксатора 1660. Например, при продолжении шарнирного поворота концевого эффектора 1620 перемещающийся фиксатор 1660 может продолжать сдвигаться проксимально, а пружина 1664 может дополнительно сжиматься. При увеличении угла шарнирного поворота концевого эффектора лепесток 1672 пластины 1670 может проталкивать перемещающийся фиксатор 1660 дальше в проксимальном направлении. В таких примерах положение перемещающегося фиксатора 1660 может зависеть от величины угла шарнирного поворота концевого эффектора 1620.
Когда перемещающийся фиксатор 1660 находится в дистальном положении (ФИГ. 49-51), гибкий пусковой стержень 1618 может передвигаться дальше дистально внутри концевого эффектора 1620, до того как захват 1662 перемещается в упор к перемещающемуся фиксатору 1660. В различных примерах дистальное положение перемещающегося фиксатора 1660 можно выбирать таким образом, что гибкий пусковой стержень 1618, например, достигает желаемого самого дистального положения в концевом эффекторе 1620 и избегает столкновения в конце хода с дистальным концом кассеты 1622 со скобами. Более того, после перемещения перемещающегося фиксатора 1660 в более проксимальное положение (ФИГ. 52 и 53) захват 1662 может перемещаться в упор к перемещающемуся фиксатору 1660 в более проксимальном положении. В различных примерах проксимальное (-ые) положение (-я) перемещающегося фиксатора 1660 можно выбирать на основании величины шарнирного поворота концевого эффектора 1620 таким образом, что гибкий пусковой стержень 1618 достигает желаемого самого дистального положения в концевом эффекторе 1620, когда концевой эффектор 1620 находится в шарнирно повернутом положении. В проксимальном (-ых) положении (-ях) перемещающийся фиксатор 1660 может взаимодействовать с захватом 1663 и ограничивать дальнейшее дистальное смещение гибкого пускового стержня 1618 до столкновения с дистальным концом кассеты 1622 со скобами в конце хода.
На ФИГ. 23 показана кассета 1222 с крепежными элементами, имеющая смягчающий элемент 1250. Кассета 1222 с крепежными элементами может быть во многих аспектах аналогична кассете 122 с крепежными элементами (ФИГ. 1). Например, кассета 1222 с крепежными элементами может иметь конструкцию и размер, которые делают возможной замену кассеты 122 с крепежными элементами (ФИГ. 1) в концевом эффекторе 120 (ФИГ. 1). В отдельных примерах кассета 1222 с крепежными элементами может включать в себя корпус кассеты, и в корпусе кассеты можно сформировать множество полостей. Кроме того, множество крепежных элементов, например таких как скобы, может быть расположено в полостях с возможностью выталкивания. Кассета 1222 с крепежными элементами расположена с возможностью извлечения в канале 1282 кассеты, который поддерживает кассету 1222 с крепежными элементами в бранше концевого эффектора 120. Канал 1282 включает в себя сформированный в нем продольный паз 1284.
Пусковой элемент, например такой как пусковой элемент 1154 (ФИГ. 22), может быть выполнен с возможностью пересечения, по меньшей мере, части продольного паза 1284 в кассете 1222 с крепежными элементами для приведения в действие салазок или клина для размещения скоб, например таких как салазки 1158 (ФИГ. 22). Во время пускового хода пусковой элемент 1154 может выталкивать крепежные элементы из кассеты 1222 с крепежными элементами, например посредством салазок 1158 и/или выталкивателей, и может рассекать ткань, смежную с кассетой 1222. Как показано на ФИГ. 23, пусковой элемент может включать в себя основание или опору 1280. В различных примерах опора 1280 может быть расположена и выполнена, например, с возможностью скольжения и/или перемещения в более широкой и/или Т-образной части продольного паза 1284.
В различных примерах мягкий ограничитель или смягчающий элемент 1250 может быть, по меньшей мере, частично расположен в пределах и/или поперек продольного паза 1284. Например, смягчающий элемент 1250 может блокировать и/или перегораживать дистальный участок продольного паза 1284. В отдельных примерах смягчающий элемент 1250 может блокировать путь опоры 1280 пускового элемента. Смягчающий элемент 1250 может быть, например, прикреплен к каналу 1282 и/или выполнен с ним за одно целое. В отдельных примерах смягчающий элемент 1250 может быть приварен и/или прикреплен к каналу 1282.
В различных примерах смягчающий элемент 1250 может формировать перемычку поперек продольного паза 1284. Как показано на ФИГ. 23, смягчающий элемент 1250 включает в себя пару ответвлений 1251 и центральный участок 1253. Ответвления 1251 присоединены к каналу 1282 на противоположных сторонах продольного паза 1284. Кроме того, центральный участок 1253 проходит между ответвлениями 1251, и, по меньшей мере, часть центрального участка 1253 расположена внутри продольного паза 1284.
Смягчающий элемент 1250, показанный на ФИГ. 23, может быть выполнен из гибкого, поддающегося деформации и/или эластичного материала. Например, смягчающий элемент 1250 может быть выполнен из материала, имеющего меньшую твердость по дюрометру, чем опора 1280 и/или канал 1282. В таких примерах смягчающий элемент 1250 может быть выполнен с возможностью, по меньшей мере, частичной амортизации и/или приспосабливания к дистальному поступательному перемещению и/или смещению опоры 1280 за пределами проксимального края смягчающего элемента 1250. Например, смягчающий элемент 1250 может функционировать в качестве мягкого ограничителя и/или тормоза. В таких примерах смягчающий элемент 1250 может сначала замедляться и/или сопротивляться дистальному смещению основания 1280. Кроме того, при продолжении выдвижения основания 1280 дистально смягчающий элемент 1250 может останавливать и/или предотвращать дальнейшее дистальное смещение пускового элемента 1154.
Дополнительно или альтернативно смягчающий элемент 1250 может быть хрупким. Например, смягчающий элемент 1250 может быть выполнен с возможностью слома при выдвижении основания 1280 дистально в и/или за пределы смягчающего элемента 1250. В отдельных примерах смягчающий элемент 1250 может замедляться и/или поглощать, по меньшей мере, часть силы опоры 1280 перед сломом.
Как описано в настоящем документе, компенсирующие длину хода смягчающие элементы в кассете со скобами, концевом эффекторе и/или стволе хирургического инструмента могут быть выполнены с возможностью деформации, сжатия и/или слома для поглощения, по меньшей мере, части пусковой силы и/или для остановки дальнейшего выдвижения пускового элемента во время пускового хода. В других примерах смягчающий элемент может включать в себя предварительно заданный путь, канал и/или отверстие в кассете со скобами. Такой смягчающий элемент может приспосабливаться к избыточному ходу пускового элемента. Избыточный ход пускового элемента может иметь место, когда пусковой ход пускового элемента не отрегулирован, например, с учетом величины угла шарнирного поворота концевого эффектора 120.
На ФИГ. 24 показана кассета 1322 с крепежными элементами, включая смягчающий элемент 1350. Во многих аспектах кассета 1322 с крепежными элементами может быть аналогична кассете 122 с крепежными элементами (ФИГ. 1). Например, кассета 1322 с крепежными элементами может иметь конструкцию и размер, которые делают возможной замену кассеты 122 с крепежными элементами (ФИГ. 1) в концевом эффекторе 120 (ФИГ. 1). В отдельных примерах кассета 1322 с крепежными элементами включает в себя корпус 1324 кассеты, и в корпусе 1324 кассеты можно сформировать множество полостей 1326. Кроме того, множество крепежных элементов, например таких как скобы, может быть расположено в полостях 1326 с возможностью выталкивания.
Пусковой элемент, например такой как пусковой элемент 1154 (ФИГ. 22), может быть выполнен с возможностью пересечения, по меньшей мере, части корпуса 1324 кассеты, например, для приведения в действие салазок или клина 1358 для размещения скоб. Такой пусковой элемент может также включать в себя основание или опору, например такую как опора 1380. Во время пускового хода пусковой элемент может выталкивать крепежные элементы из кассеты 1322 с крепежными элементами, например посредством салазок 1358 и/или выталкивателей, и может рассекать ткань, смежную с кассетой 1322.
Смягчающий элемент 1350, показанный на ФИГ. 24, включает в себя отверстие 1352, сформированное сквозь дистальный конец кассеты 1322. Например, отверстие 1352 может формировать дистальное сквозное отверстие в дистальной стенке кассеты 1322 со скобами. В показанном варианте осуществления смягчающий элемент 1350 включает в себя множество отверстий 1352. Отверстия 1352 проходят через дистальный конец кассеты 1322 и обеспечивают путь и/или зазор для продвижения, по меньшей мере, части салазок 1358 через дистальный конец. Например, когда концевой эффектор 120 (ФИГ. 1) частично шарнирно повернут или находится в шарнирно неповернутом положении, салазки 1358 могут выдвигаться дистально в упор к дистальному концу кассеты 1322. Для обеспечения непрерывного дистального перемещения салазок 1358 отверстия 1352 могут быть конструктивно выполнены с возможностью размещения самого (-ых) дистального (ых) участка (-ов) салазок 1358.
Как описано в настоящем документе, шарнирный поворот концевого эффектора может влиять на пусковой путь гибкого пускового стержня в стволе и/или концевом эффекторе хирургического инструмента. Кроме того, при шарнирном повороте концевого эффектора может изменяться самое дистальное положение пускового элемента во время пускового хода. В различных примерах контроллер выполнен с возможностью регулирования длины пускового хода пускового стержня таким образом, что пусковой элемент останавливается в одной и той же точке независимо от угла шарнирного поворота концевого эффектора. В других примерах концевой эффектор и/или пусковая система могут включать в себя смягчающий элемент, выполненный с возможностью амортизации и/или приспосабливания к изменениям самого дистального положения пускового элемента.
В различных примерах пусковой ход, например расстояние, пройденное пусковым штоком 114 (см., например, ФИГ. 1 и 3), можно выбирать таким образом, что салазки 1358 для размещения скоб по-прежнему достигают дистального конца кассеты 1322 со скобами, даже если концевой эффектор 120 (ФИГ. 1) полностью шарнирно повернут. В таких примерах салазки 1358 продолжают поступательно перемещаться дистально и выталкивать скобы из самых дистальных полостей 1326 для скоб. В результате пусковой ход может проходить за пределы дистального конца кассеты 1322 со скобами, когда концевой эффектор 120 не полностью шарнирно повернут, например, частично шарнирно повернут и/или находится в шарнирно неповернутом положении. Без смягчающего элемента, например такого как сквозные отверстия 1352, салазки 1358 столкнулись бы с дистальным концом кассеты 1322 со скобами. Смягчающий элемент может, например, предотвращать и/или минимизировать повреждение элементов пусковой системы и/или двигателя, когда концевой эффектор не полностью шарнирно повернут.
В отдельных примерах самое дистальное положение пускового элемента может быть сдвинуто проксимально, когда концевой эффектор находится в шарнирно повернутом положении. Например, компонент пусковой системы, например такой как гибкий пусковой стержень, может иметь тенденцию к изгибу наружу, когда концевой эффектор находится в шарнирно повернутом положении. В таких примерах при изгибе гибкой пусковой штанги наружу самое дистальное положение пускового элемента может сдвигаться проксимально, в результате чего возникает потребность в более длинном пусковом ходе пускового стержня при шарнирном повороте концевого эффектора.
На ФИГ. 25 показана кассета 1422 с крепежными элементами. Кассета 1422 с крепежными элементами во многих аспектах может быть аналогична кассете 122 с крепежными элементами (ФИГ. 1). Например, кассета 1422 с крепежными элементами может иметь конструкцию и размер, которые делают возможной замену кассеты 122 с крепежными элементами (ФИГ. 1) в концевом эффекторе 120 (ФИГ. 1). В отдельных примерах кассета 1422 с крепежными элементами может включать в себя корпус кассеты, и в корпусе кассеты можно сформировать множество полостей. Кроме того, множество крепежных элементов, например таких как скобы, может быть расположено в полостях с возможностью выталкивания. Кассета 1422 с крепежными элементами, показанная на ФИГ. 25, дополнительно включает в себя удлиненный канал 1482, расположенный, по меньшей мере, частично вокруг корпуса кассеты. Показанный канал 1482 включает в себя продольный паз 1484, по меньшей мере, частично проходящий через этот канал.
Как показано на ФИГ. 25, гибкий пусковой стержень 1418 может быть выполнен с возможностью передачи пускового перемещения пусковому элементу, например такому как пусковой элемент 1154 (ФИГ. 22). Гибкий пусковой стержень 1418 может быть выполнен с возможностью пересечения, по меньшей мере, части продольного паза 1484 в кассете 1422 с крепежными элементами для приведения в действие пускового элемента, например такого как пусковой элемент 1154, и/или салазок для размещения скоб, например таких как салазки 1158 (ФИГ. 22). Во время пускового хода пусковой элемент может выталкивать крепежные элементы из кассеты 1422 с крепежными элементами, например посредством салазок и/или выталкивателей, и может рассекать ткань, смежную с кассетой 1422.
В варианте осуществления, показанном на ФИГ. 25, пусковой элемент включает в себя основание или опору 1480. В различных примерах опора 1480 может быть выполнена с возможностью скольжения и/или перемещения вдоль, по меньшей мере, части продольного паза 1484. В различных примерах продольный паз 1484 может иметь Т-образную форму и/или может иметь более широкий участок, смежный с внешней поверхностью канала 1482. В отдельных примерах зацепление между опорой 1480 и пазом 1484 может быть выполнено с возможностью направления и/или удержания пускового элемента в концевом эффекторе.
Показанная кассета 1422 с крепежными элементами включает в себя дистальный ограничитель 1450. Как показано на примере варианта осуществления на ФИГ. 25, дистальный ограничитель 1450 расположен на дистальном конце продольного паза 1484. Например, дистальный ограничитель 1450 можно сформировать на дистальном конце продольного паза 1484. В различных примерах дистальный ограничитель 1450 может ограничивать и/или предотвращать дальнейшее дистальное смещение опоры 1480 в кассете 1422 со скобами и, таким образом, ограничивать и/или предотвращать дальнейшее дистальное смещение пускового элемента в кассете 1422 со скобами.
Как показано на примере варианта осуществления на ФИГ. 25, дистальный ограничитель 1450 включает в себя ступенчатый профиль на дистальном конце продольного паза 1484. Например, показанный дистальный ограничитель 1450 включает в себя множество ступенек, включая первую ступеньку 1451, вторую ступеньку 1452 и третью ступеньку 1453. Ступеньки 1451, 1452, 1452 дистального ограничителя 1450 имеют расположение и конструкцию, позволяющие размещать и/или ограничивать опору 1480 пускового элемента, когда концевой эффектор располагается под различными углами шарнирного поворота. Например, при заданном пусковом ходе пусковой элемент может останавливаться в различных положениях в конце хода внутри кассеты со скобами в зависимости от величины шарнирного поворота концевого эффектора. Например, пусковой стержень будет дальше перемещаться в кассету со скобами на заданный пусковой ход, когда концевой эффектор находится в шарнирно неповернутом положении, чем когда концевой эффектор шарнирно повернут. Когда концевой эффектор находится в шарнирно неповернутом положении, опора 1480 может перемещаться дистально к первой ступеньке 1451, которая является самой дистальной ступенькой. Следовательно, опора 1480 может поступательно перемещаться в самое дистальное положение, когда концевой эффектор находится в шарнирно неповернутом положении. Как показано на ФИГ. 25, когда концевой эффектор находится в шарнирно неповернутом положении, гибкий пусковой стержень 1418 может совмещаться с продольным пазом 1484 и первой ступенькой 1451, которая может быть расположена в центре дистального ограничителя 1450. В таких примерах гибкий пусковой стержень 1418 может проходить вдоль продольного пути, что является самым коротким расстоянием между проксимальным концом кассеты со скобами и самым дистальным положением опоры 1480.
В случае кассеты 1422ʹ со скобами, показанной на ФИГ. 25, которая соответствует кассете 1422 со скобами, когда концевой эффектор находится в шарнирно повернутом положении, шарнирный поворот концевого эффектора 120 (ФИГ. 1) может влиять на изгиб и/или прогиб гибкого пускового стержня 1418. В таких примерах гибкий пусковой стержень 1418 начинает свой пусковой ход дальше от дистального конца кассеты со скобами, чем когда концевой эффектор находится в шарнирно неповернутом положении. Дополнительно или альтернативно пусковой элемент или его опора 1480 могут смещаться в боковом направлении наружу и/или от центральной линии кассеты 1422 со скобами. Поскольку расстояние до самой дистальной ступеньки 1451 изменяется, когда концевой эффектор шарнирно повернут и/или гибкий пусковой стержень 1418 изгибается и/или прогибается, опора 1480 во время пускового хода может не проходить в кассету 1422ʹ со скобами так далеко дистально, как в случае, когда концевой эффектор 120 находится в шарнирно неповернутом положении.
Как показано на примере кассеты 1422ʹ со скобами, опора 1480 может проходить дистально к третьей ступеньке 1453, которая расположена проксимально относительно первой ступеньки 1451 при шарнирном повороте концевого эффектора. Третья ступенька 1453 является самой проксимальной ступенькой. Следовательно, когда концевой эффектор шарнирно повернут, поступательное перемещение опоры 1480 прекращается и/или иным образом ограничивается в более проксимальном положении, чем когда концевой эффектор 120 (ФИГ. 1 и 2) находится в шарнирно неповернутом положении. Дополнительно или альтернативно ступенька (-и), соответствующая (-ие) шарнирно повернутому (-ым) положению (-ям) концевого эффектора, например вторая ступенька 1452 и третья ступенька 1453, могут быть расположены в боковом направлении наружу и/или от центральной линии кассеты 1422 со скобами.
В показанном варианте осуществления опора 1480 ограничена самой проксимальной ступенькой 1453, когда концевой эффектор шарнирно повернут, например, на 75°. В других примерах опора 1480 может быть ограничена самой проксимальной ступенькой 1453, когда концевой эффектор шарнирно повернут на величину менее или более 75°. Кроме того, в других примерах дистальный ограничитель 1450 может включать в себя приемлемое число ступенек. В некоторых примерах дистальный ограничитель 1450 может, например, включать в себя две ступеньки.
В отдельных примерах дистальный ограничитель 1450 может содержать жесткий ограничитель, выполненный с возможностью резкого торможения и/или остановки дистального продвижения опоры 1480. В других примерах жесткий ограничитель может быть расположен проксимально относительно шарнирного сочленения, как описано в патенте США № 7,658,311, озаглавленном SURGICAL STAPLING INSTRUMENT WITH A GEARED RETURN MECHANISM, который выдан 9 февраля 2010 г., содержание которого полностью включено в настоящий документ путем ссылки. В других примерах дистальный ограничитель 1450 может содержать мягкий ограничитель, выполненный с возможностью изначального замедления дистального продвижения опоры 1480 и окончательной остановки дистального продвижения опоры 1480. В, по меньшей мере, одном примере дистальный ограничитель 1450 может быть выполнен из гибкого, поддающегося деформации и/или эластичного материала. Дополнительно или альтернативно дистальный ограничитель 1450 может быть хрупким и может быть выполнен с возможностью слома, например при приложении к нему предварительно заданной силы.
Как описано в настоящем документе, шарнирный поворот хирургического концевого эффектора может влиять, например, на самое дистальное положение гибкого пускового стержня, режущего элемента и/или клиновидных салазок. В отдельных примерах при перемещении концевого эффектора в шарнирно повернутое положение гибкий пусковой стержень, режущий элемент и/или клиновидные салазки могут останавливаться в положении, проксимальном по отношению к самому дистальному положению, когда концевой эффектор находится в шарнирно неповернутом положении. В таких примерах пусковой ход можно эффективно сократить за счет дуги и/или кривизны гибкого пускового стержня и его пускового пути. В отдельных примерах, как описано выше, длину пускового хода можно регулировать с учетом шарнирного поворота концевого эффектора. В некоторых примерах хирургический инструмент может включать в себя смягчающий элемент, который выполнен с возможностью амортизации и/или иного приспосабливания, по меньшей мере, к части пускового хода.
В других примерах пусковой путь гибкого пускового стержня можно регулировать с учетом шарнирного поворота концевого эффектора и эффективного изменения длины пускового хода. Например, гибкий пусковой стержень можно смещать и/или направлять вдоль пускового пути, который занимает меньшее расстояние до самого дистального положения в концевом эффекторе. В отдельных примерах отрегулированный пусковой путь может, например, препятствовать и/или сопротивляться изгибу гибкого пускового стержня наружу и/или может форсировать сдвиг вовнутрь и/или прогиб гибкого пускового стержня.
На ФИГ. 26 и 27 показан хирургический инструмент 1500. Аналогично хирургическому инструменту 100 хирургический инструмент 1500 включает в себя концевой эффектор 1520, который выполнен с возможностью зажима, скрепления и/или рассечения ткани. Хирургический инструмент 1500 также включает в себя ствол 1510 и шарнирное сочленение 1530, расположенное между стволом 1510 и концевым эффектором 1520. Аналогично гибкому пусковому стержню 118 гибкий пусковой стержень 1518 может принимать пусковое перемещение от пускового штока, например такого как пусковой шток 114 (ФИГ. 1 и 3-5), и передавать пусковое перемещение концевому эффектору 1520. Гибкий пусковой стержень 118 может быть функционально связан с режущим элементом, например таким как пусковой элемент 1154 и режущий край 1156 (ФИГ. 22), и/или выполнен с возможностью приведения в действие клиновидных салазок, например таких как салазки 1158 (ФИГ. 22).
В различных примерах ствол 1510 может включать в себя участок 1512 крепления, который соединен с концевым эффектором 1520 с возможностью вращения и/или поворота. Например, как показано на ФИГ. 26 и 27, участок 1512 крепления может быть связан с проксимальным концом удлиненного канала, имеющего конструкцию и размер для размещения кассеты с крепежными элементами. Концевой эффектор 1520 может быть выполнен с возможностью шарнирного поворота относительно ствола 1510 вокруг участка 1512 крепления. Например, удлиненный канал выполнен с возможностью перемещения и/или поворота в области участка 1512 крепления ствола 1510.
На ФИГ. 26 и 27 также показано устройство 1550 изменения или сдвига пускового пути. Устройство 1550 изменения пускового пути может быть выполнено с возможностью регулирования пускового пути гибкого пускового стержня 1518. В показанном варианте осуществления устройство 1550 изменения пускового пути расположено в области шарнирного сочленения 1530. Устройство 1550 изменения пускового пути включает в себя изогнутый или дугообразный паз 1552 и вилку или узел 1554 соединительного штифта. Как показано на ФИГ. 26 и 27, вилка 1554 включает в себя первый штифт или конец 1556 и второй штифт или конец 1558, которые расположены внутри дугообразного паза 1552. Штифты 1556 и 1558 разделены постоянным расстоянием. В различных примерах вилка 1554 может перемещаться относительно дугообразного паза 1552. Например, штифты 1556, 1558 могут перемещаться, скользить и/или плавать в пределах паза 1552.
Как показано на ФИГ. 26 и 27, часть гибкого пускового стержня 1518 может быть расположена между первым штифтом 1556 и вторым штифтом 1558. В таких примерах вилка 1554 может направлять гибкий пусковой стержень 1518. Более того, поскольку перемещение вилки 1554 ограничено дугообразным пазом 1552, устройство 1550 сдвига может регулировать пусковой путь и/или смещать гибкий пусковой стержень 1518 к измененному пусковому пути.
Когда концевой эффектор 1550 находится в шарнирно неповернутом положении, как показано на ФИГ. 26, гибкий пусковой стержень 1518 может проходить вдоль пускового пути, который расположен на одной прямой с продольной осью L ствола 1510 и концевого эффектора 1520. В таких примерах за счет геометрической формы дугообразного паза 1552 можно сохранять продольное совмещение пускового пути и продольной оси L. Точка перегиба дугообразного паза 1152 может совмещаться с продольной осью L в месте расположения первого штифта 1556 внутри паза 1152 на первой стороне продольной оси L и в месте расположения второго штифта 1558 внутри паза 1152 на второй стороне продольной оси L. В результате вилка 1554 может направлять и/или поддерживать гибкий пусковой стержень 1518 в совмещении с продольной осью L.
При перемещении концевого эффектора 1520 в шарнирно повернутое положение относительно ствола 1510, как показано на ФИГ. 27, устройство 1550 сдвига выполнено с возможностью сдвига и/или смещения гибкого пускового стержня 1518 вдоль более короткого пускового пути. Вилка 1554 может сдвигаться в боковом направлении внутри дугообразного паза 1552. Например, гибкий пусковой стержень 1518 может оттягивать вилку 1554 вовнутрь при прогибе гибкого пускового стержня 1518. Кроме того, вилка 1554 может направлять гибкий пусковой стержень 1518, поскольку вилка 1554 ограничена пазом 1552. Как показано на ФИГ. 27, вилка 1554 может сдвигаться и выходить из совмещения с продольной осью L1 ствола 1510. В таких примерах пусковой путь может быть изменен таким образом, что внутренний угол или поворот пускового пути в точке шарнирного поворота заменяется более прямым и/или закругленным путем. Поскольку устройство 1550 сдвига эффективно сокращает пусковой путь, можно снизить влияние положения в конце хода по отношению к гибкому пусковому стержню 1518, которое основано на величине угла шарнирного поворота концевого эффектора 1520. Другими словами, устройство 1550 сдвига может, по меньшей мере, частично нейтрализовать эффективное изменение длины пускового хода вследствие шарнирного поворотного перемещения.
Как показано на ФИГ. 27, при шарнирном повороте концевого эффектора вилка 1554 может сдвигаться в боковом направлении внутри дугообразного паза 1552. Таким образом, гибкий пусковой стержень 1518 подвергается воздействию силы скручивания и/или изгиба наружу, устройство 1550 сдвига выполнено с возможностью сопротивления силе скручивания и/или изгиба наружу. Например, рабочая нагрузка на боковые стенки дугообразного паза 1552 может обуславливать возникновение силы трения, которая препятствует скручиванию и/или изгибу гибкого пускового стержня 1518.
На ФИГ. 28-30 показан узел 3100 концевого эффектора. Узел 3100 концевого эффектора содержит первую браншу 3110 и вторую браншу 3120. Первая бранша 3110 содержит кассету 3112 со скобами, включая множество скоб, хранящихся в ней с возможностью извлечения. Пусковой узел 3150 служит для размещения множества скоб из кассеты 3112 со скобами. Вторая бранша 3120 содержит упор 3122, выполненный с возможностью деформации скоб при их выталкивании из кассеты 3112 со скобами. Пусковой узел 3150 выполнен с возможностью перемещения между проксимальным концом 3101 концевого эффектора и дистальным концом 3102. Пусковой узел 3150 содержит салазки 3151, выполненные с возможностью размещения скоб, режущий элемент 3152, выполненный с возможностью рассечения ткани во время продольного продвижения пускового узла 3150, и пусковой элемент 3153, выполненный с возможностью проталкивания салазок 3151 и/или режущего элемента 3152 дистально через узел 3100 концевого эффектора. Пусковой элемент 3153 выполнен с возможностью скольжения в пределах продольного паза 3111, сформированного в кассете 3112 со скобами. Салазки 3151, режущий элемент 3152 и/или пусковой элемент 3153 могут включать в себя первый кулачок 3158, выполненный с возможностью зацепления первой бранши 3110, и второй кулачок 3159, выполненный с возможностью зацепления второй бранши 3120 при продвижении пускового узла 3150 дистально. Первый кулачок 3158 и второй кулачок 3159 могут взаимодействовать для установления упора 3122 относительно кассеты 3112 со скобами и формирования зазора между ними. Пусковой элемент 3153 может приводиться в действие с помощью узла хирургического инструмента, который может содержать рукоятку, выполненную с возможностью приведения в действия врачом и/или, например, роботизированным исполнительным механизмом.
В различных вариантах осуществления, рассмотренных в настоящем документе, для определения места положения пускового узла внутри концевого эффектора используются изменения электрического сопротивления, емкости и/или индуктивности в электрической цепи. Положение пускового узла можно определить, например, путем обнаружения изменения электрического сопротивления в цепи, которое происходит вследствие перемещения пускового узла через концевой эффектор. Как показано на ФИГ. 27, узел 3100 концевого эффектора содержит множество резистивных элементов 3105. Резистивные элементы 3105 расположены продольно внутри первой бранши 3110. Резистивные элементы 3105 расположены внутри продольного паза 3111, сформированном в кассете 3112 со скобами; однако резистивные элементы 3105 могут быть расположены в любом приемлемом порядке, при котором пусковой узел 3150 может контактировать с резистивными элементами 3105. Резистивные элементы 3105 могут быть расположены в параллельных сегментах цепи в цепи обнаружения пускового развития. В, по меньшей мере, одном примере каждый резистивный элемент 3105 находится в соединении с первым общим электрическим путем, который находится в соединении с микропроцессором цепи обнаружения пускового развития. В различных примерах первый общий электрический путь может проходить, например, через кассету 3112 со скобами. Как более подробно описано ниже, при выдвижении пускового узла 3150 дистально пусковой узел 3150 замыкает или, по меньшей мере, частично замыкает цепь обнаружения пускового развития.
Части пускового узла 3150 могут быть электропроводными для обеспечения второго электрического пути между резистивными элементами 3105 и микропроцессором цепи обнаружения пускового развития. В, по меньшей мере, одном таком примере второй электрический путь может проходить, например, через пусковой элемент 3153. В других примерах второй электрический путь может проходить через вторую браншу 3120. При продвижении пускового узла 3150 через концевой эффектор 3100 к дистальному концу 3102 параллельные сегменты цепи, включая резистивные элементы 3105, последовательно замыкаются с помощью пускового узла 3150, и в результате резистивные элементы 3105 последовательно добавляются в электрический путь, который проходит пусковой узел 3150. При добавлении резистивных элементов 3105 в электрическую цепь, образованную пусковым узлом 3150, происходит увеличение электрического сопротивления цепи обнаружения пускового развития. Это изменение в электрическом сопротивлении можно обнаружить путем измерения перепада сопротивления и/или напряжения между первым электрическим путем и вторым электрическим путем. Измеренное сопротивление может быть связано с расстоянием, пройденным пусковым узлом 3150. Сопротивление цепи обнаружения пускового развития будет увеличиваться при продвижении пускового узла 3150 дистально. Соответственно, сопротивление цепи обнаружения пускового развития будет уменьшаться при втягивании пускового элемента 3150 проксимально.
Резистивные элементы 3105 обеспечивают дискретное увеличение сопротивления цепи обнаружения пускового развития, когда параллельные сегменты цепи, включая резистивные элементы 3105, контактируют и замыкаются с помощью пускового узла 3150. В различных примерах в дополнение к указанному выше параллельный сегмент цепи может оставаться замкнутым при выдвижении пускового узла 3150 дистально. Таким образом, первый параллельный сегмент цепи может быть выполнен с возможностью замыкания с помощью пускового узла 3150 и может оставаться замкнутыми, когда пусковой узел 3150 замыкает второй параллельный сегмент цепи и третий параллельный сегмент цепи и т. п. Замыкание параллельных сегментов цепи позволяет отметить маршрутные точки во время пускового развития пускового элемента. Комбинация замкнутых параллельных сегментов цепи позволяет обеспечить для цепи обнаружения пускового развития уникальное и легко опознаваемое сопротивление, которое соответствует конкретному положению или диапазону положений пускового узла 3150. В других примерах параллельный сегмент цепи выполнен с возможностью замыкания с помощью пускового узла 3150 с последующим повторным размыканием при выдвижении пускового узла 3150 дистально. Такая конструкция может передавать микропроцессору мгновенный импульс, указывающий, что пусковой узел 3150 достиг маршрутной точки. В, по меньшей мере, одном таком примере каждый из параллельных сегментов цепи может иметь отличающееся сопротивление, тем самым обеспечивая цепь обнаружения пускового развития уникальным и легко распознаваемым сопротивлением, которое соответствует конкретному положению или диапазону положений пускового узла 3150. Например, первый параллельный сегмент цепи может иметь первое сопротивление, а второй параллельный сегмент цепи может иметь второе сопротивление, которое отличается от первого сопротивления, и т. п.
Помимо резистивных элементов 3105, или в качестве альтернативы, цепь обнаружения пускового развития может включать в себя, например, потенциометр, выполненный с возможностью отслеживания пускового развития пускового узла 3150. В таких примерах сопротивление цепи обнаружения пускового развития может постоянно увеличиваться при выдвижении пускового элемента 3150 дистально. Соответственно, сопротивление цепи обнаружения пускового развития может уменьшаться при втягивании пускового элемента 3150 проксимально. Непрерывное изменение сопротивления может обеспечиваться продольным резистивным элементом, расположенным в первой бранше 3110 и/или второй бранше 3120. Пусковой узел 3150 выполнен с возможностью контакта с продольным резистивным элементом по длине концевого эффектора 3100. Сопротивление, выдерживаемое пусковым узлом, может изменяться линейно при продвижении пускового узла 3150 через концевой эффектор 3100. При продвижении пускового элемента 3153 дистально увеличивается общая длина контакта резистивного элемента с пусковым узлом 3150. Увеличение длины вызывает изменение электрического сопротивления цепи обнаружения пускового развития, которое можно обнаружить и оценить с помощью микропроцессора. В различных примерах измерение сопротивления цепи обнаружения пускового развития позволяет получить обратную связь о положении, скорости и/или ускорении пускового узла 3150.
Как показано на ФИГ. 30, удлиненный канал 3160 первой бранши 3110 выполнен с возможностью поддержки кассеты со скобами, например такой как кассета 3122 со скобами, в соответствии с различными вариантами осуществления. Удлиненный канал 3160 содержит паз 3161, выполненный с возможностью, по меньшей мере, частичного размещения описанного выше узла 3150 пускового элемента. Паз 3160 содержит дистальный конец 3162. Дистальный конец 3162 паза 3160 выполнен с возможностью размещения узла 3150 пускового элемента при достижении узлом 3150 пускового элемента положения в конце хода. Узел 3150 пускового элемента может опускаться, когда он достигает дистального конца 3162 паза 3161.
В дополнение к указанному выше хирургический инструмент может содержать систему управления, включающую в себя микропроцессор, выполненный с возможностью обнаружения опускания узла 3150 пускового элемента в концевой эффектор 3100. В, по меньшей мере, одном примере узел 3150 пускового элемента может приводиться в действие с помощью электрического двигателя, а микропроцессор может быть выполнен с возможностью отслеживания приводной мощности электрического двигателя. В, по меньшей мере, одном таком примере микропроцессор может, например, отслеживать ток, отбираемый электрическим двигателем. Когда система управления обнаруживает увеличение мощности, потребляемой электрическим двигателем, достаточное для индикации того, что узел 3150 пускового элемента опустился, система управления может отключать питание электрического двигателя и/или менять полярность напряжения, подаваемого на узел 3150 пускового элемента. Помимо или вместо указанного выше узел 3100 концевого эффектора может включать в себя датчик, например такой как датчик 3106, который может обнаруживать, что узел 3150 пускового элемента достиг конца своего пускового хода. Датчик 3106 может содержать, например, датчик приближения и/или датчик на эффекте Холла. В любом случае система управления может включать в себя средства для генерирования тактильной обратной связи в рукоятке хирургического инструмента для указания пользователю хирургического инструмента, что узел 3150 пускового элемента достиг конца своего пускового хода. В различных примерах тактильную обратную связь можно генерировать, например, с помощью электрического двигателя, содержащего несбалансированный ротор. При размещении точки 3162 опускания дистально относительно шарнирного сочленения 3130 самое дальнее положение, до которого может дойти пусковой узел 3150, связано с дистальным концом 3102 концевого эффектора 3100 и не зависит от шарнирного поворота шарнирного сочленения 3130.
На ФИГ. 31-33 показан узел 3200 концевого эффектора. Узел 3200 концевого эффектора содержит первую браншу 3210 и вторую браншу 3220. Первая бранша 3210 содержит кассету 3212 со скобами, включая множество скоб, хранящихся в ней с возможностью извлечения. Пусковой узел 3250 может служить для размещения множества скоб из кассеты 3212 со скобами. Вторая бранша 3220 содержит упор 3222, выполненный с возможностью деформации скоб при их выталкивании из кассеты 3212 со скобами. Пусковой узел 3250 выполнен с возможностью перемещения между проксимальным концом 3201 концевого эффектора и дистальным концом 3202. Пусковой узел 3250 содержит салазки 3251, выполненные с возможностью размещения скоб, режущий элемент 3252, выполненный с возможностью рассечения ткани во время продольного продвижения пускового узла 3250, и пусковой элемент 3253, выполненный с возможностью проталкивания салазок 3251 и/или режущего элемента 3252 дистально через узел 3200 концевого эффектора. Пусковой элемент 3253 может быть приведен в действие с помощью рукоятки, управляемой, например, врачом и/или роботизированным исполнительным механизмом.
Узел 3200 концевого эффектора дополнительно содержит дистальный датчик 3224b и проксимальный датчик 3254a. Дистальный датчик 3224b выполнен с возможностью обнаружения положения второй бранши 3220 и/или положения пускового узла 3250. Проксимальный датчик 3254a выполнен с возможностью обнаружения положения пускового узла 3250. Дистальный датчик 3224b и проксимальный датчик 3254a содержат, например, датчики на эффекте Холла. Дистальный датчик 3224b расположен на дистальном конце 3202 концевого эффектора 3200 на второй бранше 3220. Проксимальный датчик 3254a расположен на пусковом узле 3250 и выполнен с возможностью перемещения между проксимальным концом 3201 концевого эффектора 3200 и дистальным концом 3202 вместе с пусковым узлом 3250. Кассета 3212 со скобами дополнительно содержит дистальный обнаруживаемый элемент 3214b и проксимальный обнаруживаемый элемент 3214a. Обнаруживаемые элементы 3214a, 3214b могут быть, по меньшей мере, частично выполнены, например, из черного металла. В различных примерах обнаруживаемые элементы 3214a, 3214b могут содержать, например, постоянные магниты и/или электромагниты. В любом случае обнаруживаемые элементы 3214a, 3214b выполнены с возможностью обнаружения с помощью датчиков 3254a, 3224b. Проксимальный обнаруживаемый элемент 3214a расположен, например, внутри кассеты 3212 со скобами на проксимальном конце 3201 концевого эффектора 3200. Дистальный обнаруживаемый элемент 3214b расположен, например, внутри кассеты 3212 со скобами на дистальном конце 3202 концевого эффектора 3200.
Когда кассета 3212 со скобами расположена в концевом эффекторе 3200, обнаруживаемые элементы 3214a, 3214b кассеты 3212 со скобами могут обеспечивать датчики 3254a, 3224b хирургического инструмента исходной сигнальной конфигурацией. Исходная сигнальная конфигурация может взаимодействовать с микропроцессором системы управления хирургическим инструментом непосредственно после установки кассеты 3212 со скобами в концевой эффектор 3200. В различных примерах хирургический инструмент может включать в себя датчик наличия кассеты, выполненный с возможностью обнаружения наличия кассеты со скобами в концевом эффекторе 3200. Датчик наличия кассеты также обменивается сигналами с микропроцессором системы управления. Когда микропроцессор обнаруживает, что в концевом эффекторе 3200 не установлена кассета со скобами, микропроцессор может не выполнять оценку сигналов датчиков 3254a, 3224b, а когда микропроцессор обнаруживает, что в концевом эффекторе 3200 установлена кассета со скобами, микропроцессор может выполнять оценку исходных сигналов датчиков 3254a, 3224b.
В ходе выполнения оценки исходных сигналов датчиков 3254a, 3224b микропроцессор может определять тип кассеты 3212 со скобами, расположенной в концевом эффекторе 3200. Более конкретно, каждый тип кассеты со скобами, который может применяться с концевым эффектором 3200, может содержать уникальную конструкцию обнаруживаемых элементов 3214a и/или 3214b, которая может создавать уникальный массив магнитного поля, который выполнен с возможностью обнаружения с помощью датчиков 3254a и/или 3224b и идентификации с помощью микропроцессора системы управления. Например, обнаруживаемый элемент 3214a может генерировать магнитное поле первой интенсивности для первого типа кассеты со скобами и магнитное поле второй интенсивности для второго типа кассеты со скобами, и т. п., которые могут быть обнаружены с помощью датчика 3254a во время начальной оценки сигналов датчика. В различных примерах пусковая система 3250 может удерживаться в предварительно заданном или исходном положении во время начальной оценки сигналов датчика таким образом, что можно точно идентифицировать кассету со скобами, расположенную в концевом эффекторе 3200. В любом случае микропроцессор может обратиться к таблице преобразования и на основании величины интенсивности магнитного поля, обнаруженной во время оценки исходных сигналов, определить правильную операционную программу для хирургического инструмента для надлежащей активации кассеты со скобами, расположенной в концевом эффекторе 3200. Таблица преобразования может храниться в виртуальной памяти и/или физической памяти. Такая память может быть выполнена с возможностью доступа с помощью микропроцессора и/или может быть его неотъемлемой частью.
Положение второй бранши 3220 можно отслеживать, чтобы определить, находится ли вторая бранша 3220 в положении для деформации скоб, при выталкивании скоб из кассеты 3212 со скобами. Дистальный обнаруживаемый элемент 3214b расположен таким образом, что сигнал, обнаруженный дистальным датчиком 3224b, связан с положением второй бранши 3220 относительно первой бранши 3210. Другими словами, расстояние между дистальным датчиком 3224b и дистальным обнаруживаемым элементом 3214b влияет на величину магнитного поля, обнаруженную дистальным датчиком 3224b. Когда вторая бранша 3220 находится в открытом положении, дистальный датчик 3224b будет обнаруживать первую интенсивность магнитного поля, вырабатываемого дистальным обнаруживаемым элементом 3214b. Когда вторая бранша 3220 находится в полностью закрытом положении, дистальный датчик 3224b будет обнаруживать вторую интенсивность магнитного поля, вырабатываемого дистальным обнаруживаемым элементом 3214b. Как будет понятно читателю, вторая интенсивность, обнаруживаемая дистальным датчиком 3224b, больше первой интенсивности поля, поскольку дистальный датчик 3224b находится ближе к дистальному обнаруживаемому элементу 3214b, когда вторая бранша 3220 находится в полностью закрытом положении.
В дополнение к указанному выше микропроцессор может использовать интенсивность магнитного поля, обнаруженную дистальным датчиком 3224b, для определения положения второй бранши 3220 относительно первой бранши 3210. Если микропроцессор обнаруживает, что вторая бранша 3220 недостаточно закрыта для надлежащего формирования скоб при их выталкивании из кассеты 3212 со скобами, микропроцессор может предотвратить дистальное выдвижение пусковой системы 3250. В, по меньшей мере, одном таком примере микропроцессор может запретить подачу питания на электрический двигатель, выполненный с возможностью приведения в действие пусковой системы 3250. Если микропроцессор обнаруживает, что вторая бранша 3220 достаточно закрыта для надлежащего формирования скоб при их выталкивании из кассеты 3212 со скобами, микропроцессор может выдвигать пусковую систему 3250 дистально по команде пускового исполнительного механизма, управляемого, например, пользователем хирургического инструмента. В различных примерах микропроцессор может предотвращать выдвижение пусковой системы 3250 дистально, если интенсивность магнитного поля, обнаруженная дистальным датчиком 3224b, находится в первом диапазоне, и, соответственно, разрешать выдвижение пусковой системы 3250 дистально, если интенсивность магнитного поля, обнаруженная дистальным датчиком 3224b, находится во втором диапазоне.
Помимо или вместо указанного выше положение пусковой системы 3250 можно отслеживать с помощью проксимального датчика 3254a и/или дистального датчика 3224b при продвижении пусковой системы 3250 от проксимального конца 3201 концевого эффектора 3200 к дистальному концу 3202. Когда пусковая система 3250 находится в неактивированном положении, как показано на ФИГ. 31, проксимальный датчик 3254a располагается смежно, но проксимально относительно проксимального обнаруживаемого элемента 3214a. В таком положении проксимальный датчик 3254a может обнаруживать первое магнитное поле, вырабатываемое проксимальным обнаруживаемым элементом 3214a. При перемещении пусковой системы 3250 дистально пусковая система 3250 перемещается ближе к проксимальному обнаруживаемому элементу 3214a, и в результате возрастает величина первого магнитного поля, обнаруживаемого проксимальным датчиком 3254a. После того как пусковая система 3250 проходит проксимальный обнаруживаемый элемент 3214a, как показано на ФИГ. 32, происходит уменьшение величины первого магнитного поля, обнаруживаемого проксимальным датчиком 3254a. В различных примерах проксимальный датчик 3254a и проксимальный обнаруживаемый элемент 3214a может совмещаться на одной линии вдоль продольной оси, и величина первого магнитного поля, обнаруживаемого проксимальным датчиком 3254a, обратно пропорциональна квадрату расстояния между проксимальным датчиком 3254a и проксимальным обнаруживаемым элементом 3214a. В, по меньшей мере, одном таком примере проксимальный обнаруживаемый элемент 3214a может совмещаться с путем проксимального датчика 3254a. В других примерах проксимальный обнаруживаемый элемент 3214a может быть смещен относительно пути проксимального датчика 3254a.
Как описано выше, проксимальный датчик 3254a обменивается сигналами с микропроцессором системы управления хирургическим инструментом. В дополнение к указанному выше микропроцессор может обратиться к другой таблице преобразования и на основании величины первой интенсивности магнитного поля, обнаруженной с помощью проксимального датчика 3254a, оценить положение пусковой системы 3250, расположенной в концевом эффекторе 3200. Аналогично указанному выше таблица преобразования может храниться в виртуальной памяти и/или физической памяти. Такая память может быть выполнена с возможностью доступа с помощью микропроцессора и/или может быть его неотъемлемой частью. В, по меньшей мере, одном примере таблица преобразования может содержать массив величин магнитного поля, которые расположены последовательно, что соответствует дистальному продвижению пусковой системы 3250. Микропроцессор может сравнивать величину первой интенсивности магнитного поля, обнаруженной проксимальным датчиком 3254a, со значением из массива величин в таблице преобразования. В некоторых примерах помимо сравнения одного или более ранее полученных значений с массивом микропроцессор может сравнивать текущее или недавно полученное значение с массивом. Таблица преобразования может дополнительно включать в себя массив значений положения, которые связаны с массивом величин интенсивности магнитного поля и могут указывать микропроцессору положение пусковой системы 3250.
При продвижении пусковой системы 3250 дистально, как показано на ФИГ. 33, пусковая система 3250 может приближаться к дистальному обнаруживаемому элементу 3214b. Аналогично указанному выше проксимальный датчик 3254a может обнаруживать второе магнитное поле, вырабатываемое дистальным обнаруживаемым элементом 3214b. При перемещении пусковой системы 3250 дистально пусковая система 3250 перемещается ближе к дистальному обнаруживаемому элементу 3214b, и в результате возрастает величина второго магнитного поля, обнаруживаемого проксимальным датчиком 3254a. Дистальный обнаруживаемый элемент 3214b расположен дистально относительно проксимального датчика 3254a на всем протяжении пускового хода пусковой системы 3250. В других вариантах осуществления проксимальный датчик 3254a может проходить дистальный обнаруживаемый элемент 3214b во время пускового хода пусковой системы 3250. В таких условиях, когда пусковая система 3250 проходит дистальный обнаруживаемый элемент 3214b, происходит уменьшение величины второго магнитного поля, обнаруживаемого проксимальным датчиком 3254a. В различных примерах проксимальный датчик 3254a и дистальный обнаруживаемый элемент 3214b могут совмещаться на одной линии вдоль продольной оси, а величина второго магнитного поля, обнаруживаемого проксимальным датчиком 3254a, обратно пропорциональна квадрату расстояния между проксимальным датчиком 3254a и дистальным обнаруживаемым элементом 3214b. В, по меньшей мере, одном таком примере дистальный обнаруживаемый элемент 3214b выполнен с возможностью совмещения с путем проксимального датчика 3254a. В других примерах дистальный обнаруживаемый элемент 3214b может быть смещен относительно пути проксимального датчика 3254a.
Как указано выше, проксимальный датчик 3254a может быть выполнен с возможностью обнаружения магнитного поля, вырабатываемого проксимальным обнаруживаемым элементом 3214a, для определения положения пусковой системы 3250. Альтернативно проксимальный датчик 3254a может быть выполнен с возможностью обнаружения магнитного поля, вырабатываемого дистальным обнаруживаемым элементом 3214b, для определения положения пусковой системы 3250. Такие альтернативные варианты возможны, только когда один из обнаруживаемых элементов 3214a, 3214b генерирует магнитное поле во время пускового хода пусковой системы 3250. В, по меньшей мере, одном таком варианте осуществления, по меньшей мере, один из обнаруживаемых элементов 3214a, 3214b может содержать электромагнит, выполненный с возможностью отключения во время пускового хода пусковой системы 3250 таким образом, чтобы электромагнит не вырабатывал поддающегося обнаружению магнитного поля. Однако в различных примерах оба обнаруживаемых элемента 3214a, 3214b вырабатывают магнитное поле во время пускового хода пусковой системы 3250, особенно если обнаруживаемые элементы 3214a, 3214b, например, содержат постоянные магниты. В таких примерах проксимальный датчик 3254a может одновременно обнаруживать первое магнитное поле, вырабатываемое проксимальным обнаруживаемым элементом 3214a, и второе магнитное поле, вырабатываемое дистальным обнаруживаемым элементом 3214b. Таким образом, общее магнитное поле, обнаруживаемое проксимальным датчиком 3254a на основе первого магнитного поля и второго магнитного поля, можно оценивать и сравнивать с массивом величин магнитного поля, в котором учитывается совокупное магнитное поле.
На ФИГ. 34-41 показан узел 3300 концевого эффектора. Узел 3300 концевого эффектора содержит первую браншу 3310 и вторую браншу 3320. Первая бранша 3310 содержит кассету 3312 со скобами, которая включает в себя множество скоб, хранящихся в ней с возможностью извлечения. Пусковой узел 3350 может служить для размещения множества скоб из кассеты 3312 со скобами. Вторая бранша 3320 содержит упор 3322, выполненный с возможностью деформации скоб при их выталкивании из кассеты 3312 со скобами. Пусковой узел 3350 выполнен с возможностью перемещения между проксимальным концом 3301 концевого эффектора и дистальным концом 3302. Пусковой узел 3350 содержит салазки 3351, выполненные с возможностью размещения скоб, режущий элемент 3352, выполненный с возможностью рассечения ткани во время продольного продвижения пускового узла 3350, и пусковой элемент 3253, выполненный с возможностью проталкивания салазок 3351 и/или режущего элемента 3352 дистально через узел 3300 концевого эффектора. Пусковой элемент 3353 может быть приведен в действие с помощью узла хирургического инструмента, содержащего ствол 3340 и шарнирное сочленение 3330, которое выполнено с возможностью обеспечения шарнирного поворота узла 3300 концевого эффектора относительно ствола 3340. Пусковой элемент 3353 расположен в стволе 3340 таким образом, что при приведении пускового элемента 3353 в действие пусковой элемент 3353 перемещается продольно внутри ствола 3340, выталкивая скобы из кассеты 3312 со скобами. В дополнение к указанному выше пусковой элемент 3353 может проходить через шарнирное сочленение 3330 и может сгибаться внутри шарнирного сочленения 3330 при шарнирном повороте концевого эффектора 3300. Узел хирургического инструмента может дополнительно содержать рукоятку, выполненную с возможностью приведения в действие врачом и/или, например, роботизированным исполнительным механизмом для перемещения пускового элемента 3353 относительно концевого эффектора 3300.
Проксимальный конец концевого эффектора 3300 содержит фиксатор 3360 канала. Фиксатор 3360 канала, показанный на ФИГ. 35, содержит проходящую от него приводную стойку 3365, которая выполнена с возможностью выдвижения дистально и/или втягивания проксимально с помощью исполнительного механизма 3366 шарнирного сочленения для обеспечения шарнирного поворота концевого эффектора 3300 вокруг шарнирного сочленения 3330. Фиксатор 3360 канала содержит множество датчиков, например таких как первый датчик 3368a и второй датчик 3368b. Датчики 3368a, 3368b расположены дистально относительно шарнирного сочленения 3330 внутри паза 3331 пускового элемента, сформированного в держателе 3360 канала. Пусковой элемент 3353 расположен внутри паза 3331 пускового элемента с возможностью скольжения. Как преимущественно показано на ФИГ. 34, пусковой элемент 3353 содержит множество элементов 3356a, 3357a, 3356b, 3357b, 3356c, 3357c, 3356d и 3357d, которые расположены ступенчато, включая первый ряд 3355a элементов 3356a-3356d, расположенный со сдвигом относительно второго ряда 3355b элементов 3357a-3357d. Первый ряд 3355a элементов 3356a-d выполнен с возможностью обнаружения с помощью первого датчика 3368a. Второй ряд 3355b элементов 3357a-d выполнен с возможностью обнаружения с помощью второго датчика 3368b. При перемещении пускового элемента 3353 дистально через фиксатор 3360 канала и концевой эффектор 3300 первый датчик 3368a и второй датчик 3368b могут обнаруживать элементы 3356a-d и 3357a-d соответственно. Как более подробно описано ниже, сигналы, генерируемые датчиками 3368a, 3368b, соответствуют положению пускового элемента 3353.
Датчики 3368a, 3368b обмениваются сигналами с микропроцессором системы управления хирургическим инструментом, которая выполнена с возможностью приема и интерпретации сигналов, генерированных датчиками 3368a, 3368b. Первый датчик 3368a выполнен с возможностью передачи микропроцессору первого сигнала. Первый сигнал может содержать серию импульсов, которые соответствуют датчику 3368a, обнаруживающему элементы 3356a-d. Например, первый датчик 3368a выполнен с возможностью передачи высокого потенциала по первой цепи, находящейся в соединении с входным каналом микропроцессора, когда первый датчик 3368a обнаруживает элемент 3356a-d, расположенный смежно с первым датчиком 3368a, и передачи низкого потенциала по первой цепи, когда первый датчик 3368a не обнаруживает элемент 3356a-d смежно с первым датчиком 3368a. Аналогично второй датчик 3368a выполнен с возможностью передачи высокого потенциала по второй цепи, находящейся в соединении с входным каналом микропроцессора, когда второй датчик 3368b обнаруживает элемент 3357a-d, расположенный смежно со вторым датчиком 3368b, и передачи низкого потенциала по второй цепи, когда второй датчик 3368b не обнаруживает элемент 3357a-d смежно со вторым датчиком 3368b. Микропроцессор может считать импульсы, отправляемые датчиками и указывающие, что элемент прошел датчик, и на основании такого подсчета оценивать положение пускового элемента 3353 во время его пускового хода. В отдельных примерах микропроцессор может вести первый подсчет элементов 3356a-d, прошедших первый датчик 3368a, и отдельный, второй, подсчет элементов 3356a-d, прошедших второй датчик 3368b. В других примерах микропроцессор может вести совокупный подсчет обнаруженных элементов 3356a-d и 3357a-d. В любом случае микропроцессор может подсчитать число элементов 3356a-d и 3357a-d, прошедших датчики 3368a и 3368b, чтобы определить, достиг ли пусковой элемент 3353 конца хода.
В различных примерах для определения положения пускового элемента 3353 может быть необходим только один комплект элементов 3356a-d и 3357a-d и один датчик 3368a и 3368b. Один комплект элементов может обеспечивать микропроцессор массивом данных, который можно связать с другим массивом данных, который соответствует положению пускового элемента 3353. Однако применение множества комплектов элементов и датчиков обеспечивает микропроцессор матрицей данных, которую можно связать с массивом данных, который соответствует положению пускового элемента 3353. Такая матрица данных показана на ФИГ. 39.
Элементы 3356a-d и 3357a-d могут содержать любые приемлемые элементы, которые могут быть обнаружены с помощью датчиков 3368a и 3368b соответственно. В различных примерах элементы 3356a-d и 3357a-d могут содержать магнитные элементы, а датчики 3368a и 3368b могут содержать датчики на эффекте Холла, например выполненные с возможностью обнаружения магнитных элементов. В отдельных примерах элементы 3356a-d и 3357a-d могут содержать отражающие элементы, а каждый из датчиков 3368a и 3368b может, например, содержать источник и приемник сигналов. В, по меньшей мере, одном таком примере элементы 3356a-d и 3357a-d могут содержать сквозные отверстия. В, по меньшей мере, одном таком примере датчики 3368a и 3368b могут содержать оптические датчики, выполненные с возможностью обнаружения изменения цвета и/или отражающей способности пускового элемента 3353 при прохождении элементами 3356a-d и 3357a-d датчиков 3368a и 3368b соответственно. В отдельных примерах датчики 3368a и 3368b могут быть выполнены с возможностью обнаружения лазерных сигналов, например исходящих от противоположной стороны пускового элемента 3353. В любом случае элементы 3356a-d могут быть расположены с равными промежутками, например, вдоль первого ряда 3355a. Аналогично элементы 3357a-d могут быть расположены с равными промежутками, например, вдоль второго ряда 3355b. Микропроцессор может быть выполнен с возможностью оценки скорости обнаружения элементов 3356a-d и/или элементов 3357a-d с помощью первого датчика 3368a и второго датчика 3368b соответственно. В таких примерах микропроцессор также может оценивать скорость, темп и/или ускорение пускового элемента 3353.
Если элементы 3356a-d и 3357a-d пускового элемента 3353 содержат сквозные отверстия, эти сквозные отверстия могут иметь любую приемлемую геометрическую форму, например такую как круглая геометрическая форма. Как показано на ФИГ. 40, пусковой элемент 3453 содержит множество обнаруживаемых элементов 3459, расположенных вдоль продольной оси пускового элемента 3453. В, по меньшей мере, одном примере обнаруживаемые элементы 3459, например, содержат квадратные сквозные отверстия. В отдельных примерах обнаруживаемые элементы 3459 содержат рельефные поверхности на пусковом элементе 3453. В, по меньшей мере, одном таком примере рельефные поверхности, например, являются квадратными.
На ФИГ. 41 показан альтернативный пусковой элемент 3553 пускового узла 3550, содержащий проходящие от него зубцы или зазубрины 3558, для применения в сочетании с узлом 3500 концевого эффектора. Зубцы 3558 расположены вдоль продольной оси пускового элемента 3553, а между зубцами 3558 предусмотрены зазоры. Датчик 3535, установленный на концевом эффекторе 3500, выполнен с возможностью обнаружения зубцов 3558 и/или зазоров между зубцами 3558 при выдвижении пускового элемента 3353 дистально. В, по меньшей мере, одном примере датчик 3535 может, например, содержать, оптический датчик. Датчик 3535 обменивается сигналами с микропроцессором системы хирургического инструмента. Датчик 3535 посылает сигналы и/или сигнальные импульсы, инициированные зубцами 3558 и/или зазорами, расположенными между зубцами 3558, для указания положения пускового элемента 3553 при перемещении пускового узла 3550 через концевой эффектор 3500. Пусковой элемент 3353 может содержать комплект или предварительно заданное число зубцов 3558, которые могут инициировать отправку датчиком 3535 серии или предварительно заданного числа сигнальных импульсов микропроцессору для указания продвижения пускового узла 3550. Микропроцессор выполнен с возможностью подсчета сигнальных импульсов, получаемых от датчика 3535, и сравнения подсчитанных сигнальных импульсов с предварительно заданным числом импульсов для оценки того, достиг ли пусковой элемент 3553 положения в конце хода, и/или оценки расстояния, которое должен пройти пусковой элемент 3553 для достижения положения в конце хода. Контроллер выполнен с возможностью подсчета зубцов 3558 между самым дистальным зубцом 3558d, который передает микропроцессору первый сигнальный импульс, и самым проксимальным зубцом 3558p, который передает микропроцессору последний сигнальный импульс. Обнаружение положения в конце хода происходит после того, как микропроцессор устанавливает, что число зубцов 3558, обнаруженных датчиком 3535, равно числу зубцов 3558 на пусковом элементе 3553.
На ФИГ. 42 показан удлиненный канал 3610. Удлиненный канал 3610 можно использовать в соответствии с различными вариантами осуществления, описанными в настоящем документе. Удлиненный канал 3610 выполнен с возможностью поддержки кассеты со скобами концевого эффектора. В канале 3610 сформированы первая полость 3602 и вторая полость 3604. Первая полость 3602 размещена на проксимальном участке 3601 канала 3610, а вторая полость 3604 размещена на дистальном участке 3603 канала 3610. Первая полость 3602 выполнена с возможностью поддержки в ней первого или проксимального датчика, а вторая полость 3604 выполнена с возможностью поддержки в ней второго или дистального датчика. Датчики могут представлять собой любой приемлемый датчик, выполненный с возможностью обнаружения перемещения пускового узла. Проксимальный датчик выполнен с возможностью обнаружения, например, того, находится ли пусковой узел в неактивированном или невыдвинутом положении. Дистальный датчик выполнен с возможностью обнаружения, например, того, достиг ли пусковой узел конца своего хода.
На ФИГ. 43 показана бранша 3710 для применения с узлом 3700 концевого эффектора хирургического сшивающего инструмента. Бранша 3710 содержит кассету 3712 со скобами и пусковой узел 3750. Кассета 3712 со скобами содержит сформированный в ней продольный паз 3713, выполненный с возможностью размещения пускового узла 3750. Пусковой узел 3750 выполнен с возможностью перемещения между проксимальным концом 3701 и дистальным концом 3702 кассеты 3712 со скобами. Пусковой узел 3750 содержит режущий элемент 3752, который включает в себя, во-первых, режущий край, выполненный с возможностью рассечения ткани, и, во-вторых, электропроводный участок для обеспечения электрического пути поперек паза 3713, т. е. от одной боковой стороны паза 3713 к другой. Кассета 3712 со скобами содержит электропроводный слой 3770, с которым контактирует электропроводный участок режущего элемента 3752 при перемещении пускового узла 3750 через кассету 3712 со скобами. Слой 3770 содержит множество резистивных областей, например таких как области 3771, 3772, 3773 и 3774. В, по меньшей мере, одном таком примере слой 3770 проходит вдоль обеих сторон паза 3713. На ФИГ. 41 показана только одна из двух сторон слоя 3770. Как более подробно описано ниже, сопротивление цепи, возникающее между слоем 3770 и режущим элементом 3752 при продвижении пускового узла 3750 через кассету 3712 со скобами, можно отслеживать и соотносить с положением пускового узла 3750.
В различных примерах в дополнение к указанному выше каждая резистивная область 3771, 3772, 3773 и 3774 выполнена из электропроводного материала. В, по меньшей мере, одном таком примере первая резистивная область 3771 выполнена из первого электропроводного материала, вторая резистивная область 3772 выполнена из второго электропроводного материала, третья резистивная область 3773 выполнена из третьего электропроводного материала, а четвертая резистивная область 3774 выполнена из четвертого электропроводного материала. В различных примерах первый материал, второй материал, третий материал и четвертый материал представляют собой различные электропроводные материалы, имеющие, например, различное сопротивление. В отдельных примерах первый материал, второй материал, третий материал и/или четвертый материал могут быть выполнены из одного и того же электропроводного материала, если резистивные области, имеющие одинаковое сопротивление, не расположены смежно друг с другом. В любом случае резистивные области 3771, 3772, 3773 и 3774 являются частью цепи обнаружения пускового развития. Цепь обнаружения пускового развития дополнительно содержит первый проводник, связанный с первой стороной слоя 3770, и второй проводник, связанный со второй стороной слоя 3770. Первый проводник и второй проводник связаны с микропроцессором, который выполнен с возможностью обнаружения и оценки сопротивления цепи обнаружения пускового развития, как более подробно описано ниже.
Резистивные области 3771, 3772, 3773 и 3774 слоя 3770 могут соответствовать различным положениям режущего элемента 3752 и, соответственно, различным положениям пускового узла 3750. Режущий элемент 3752 выполнен с возможностью перемещения на протяжении пускового хода между проксимальным, невыдвинутым положением и дистальным, полностью выдвинутым положением. Когда режущий элемент 3752 находится в проксимальном, невыдвинутом положении, режущий элемент 3752 контактирует с первой резистивной областью 3771. Такое положение можно назвать исходным положением режущего элемента 3752. Когда режущий элемент 3752 контактирует с первой резистивной областью 3771, цепь обнаружения пускового развития имеет первое сопротивление, которое может быть обнаружено микропроцессором. В таких примерах цепь обнаружения пускового развития может включать в себя первый проводник, первую сторону первой резистивной области 3771, режущий элемент 3752, вторую сторону первой резистивной области 3771 и второй проводник. Когда микропроцессор обнаруживает, что цепь обнаружения пускового развития имеет первое сопротивление, микропроцессор может определить, что режущий элемент 3752 находится в самом проксимальном положении и что для полного выталкивания скоб из кассеты со скобами необходим полный пусковой ход. Хотя первое сопротивление цепи обнаружения пускового развития может содержать специфическое первое сопротивление, в различных примерах оно также может включать в себя первый диапазон сопротивлений.
Когда режущий элемент 3752 выдвинут дистально из исходного положения, режущий элемент 3752 может выходить из контакта с первой резистивной областью 3771 и входить в контакт со второй резистивной областью 3772. Такое положение можно назвать положением блокировки режущего элемента 3752. Положение блокировки режущего элемента 3752 представляет собой самое удаленное дистальное положение, в которое можно выдвинуть режущий элемент 3752 при отсутствии неизрасходованной кассеты со скобами в первой бранше 3710. Когда режущий элемент 3752 контактирует со второй резистивной областью 3772, цепь обнаружения пускового развития может иметь второе сопротивление, которое может быть обнаружено микропроцессором. В таких примерах цепь обнаружения пускового развития может включать в себя первый проводник, первую сторону второй резистивной области 3772, режущий элемент 3752, вторую сторону второй резистивной области 3772 и второй проводник. Когда микропроцессор обнаруживает, что цепь обнаружения пускового развития имеет второе сопротивление, микропроцессор может определить, что режущий элемент 3752 находится в положении блокировки и что режущий элемент 3752 может быть заблокирован от выдвижения дистально при отсутствии неиспользованной кассеты со скобами в первой бранше 3710. В результате в различных примерах микропроцессор может управлять электрическим двигателем, который приводит в движение пусковой узел 3750 дистально с уменьшенной скоростью при перемещении режущего элемента 3752 дистально от второй резистивной области 3772 к третьей резистивной области 3773, в том случае, если режущий элемент 3752 контактирует с замком. Хотя второе сопротивление цепи обнаружения пускового развития может содержать специфическое второе сопротивление, в различных примерах оно также может включать в себя второй диапазон сопротивлений.
Когда режущий элемент 3752 выдвинут дистально из положения блокировки, режущий элемент 3752 может выходить из контакта со второй резистивной областью 3772 и входить в контакт с третьей резистивной областью 3773. Третья резистивная область 3773 соответствует диапазону положений, в которых пусковой узел 3750 выталкивает скобы из кассеты 3712 со скобами. Когда режущий элемент 3752 контактирует с третьей резистивной областью 3773, цепь обнаружения пускового развития может иметь третье сопротивление, которое может быть обнаружено микропроцессором. В таких примерах цепь обнаружения пускового развития может включать в себя первый проводник, первую сторону третьей резистивной области 3773, режущий элемент 3752, вторую сторону третьей резистивной области 3773 и второй проводник. Когда микропроцессор обнаруживает, что цепь обнаружения пускового развития имеет третье сопротивление, микропроцессор может определить, что пусковой узел 3750 выталкивает скобы в ткань и что режущий элемент 3752 рассекает ткань. В различных примерах микропроцессор может управлять электрическим двигателем, который приводит в движение пусковой узел 3750 с приемлемой скоростью при перемещении режущего элемента 3752 через третью резистивную область 3773. Приемлемая скорость может представлять собой, например, постоянную скорость. В некоторых примерах режущий элемент 3752 может, например, ускоряться на проксимальном конце третьей резистивной области 3773 и замедляться на дистальном конце третьей резистивной области 3773. Хотя третье сопротивление цепи обнаружения пускового развития может содержать специфическое третье сопротивление, в различных примерах оно также может включать в себя третий диапазон сопротивлений.
Когда режущий элемент 3752 выдвинут дистально из диапазона выталкивания скоб, режущий элемент 3752 может выходить из контакта с третьей резистивной областью 3773 и входить в контакт с четвертой резистивной областью 3774. Четвертая резистивная область 3774 соответствует самому дистальному полностью выдвинутому положению режущего элемента 3752. Когда режущий элемент 3752 контактирует с четвертой резистивной областью 3774, цепь обнаружения пускового развития может иметь четвертое сопротивление, которое может быть обнаружено микропроцессором. В таких примерах цепь обнаружения пускового развития может включать в себя первый проводник, первую сторону четвертой резистивной области 3774, режущий элемент 3752, вторую сторону четвертой резистивной области 3774 и второй проводник. Когда микропроцессор обнаруживает, что цепь обнаружения пускового развития имеет четвертое сопротивление, микропроцессор может определить, что пусковой узел 3750 находится в конце своего пускового хода. В этой точке микропроцессор может останавливать электрический двигатель, который приводит в действие пусковой узел 3750. В некоторых примерах микропроцессор может автоматически менять направление электрического двигателя на обратное и втягивать режущий элемент 3752. Салазки 3251 могут оставаться на дистальном конце 3702 кассеты 3712 со скобами или втягиваться проксимально вместе с режущим элементом 3752. Хотя четвертое сопротивление цепи обнаружения пускового развития может содержать специфическое четвертое сопротивление, в различных примерах оно также может включать в себя четвертый диапазон сопротивлений.
Обнаружение первого, второго, третьего и четвертого сопротивлений может обеспечивать обнаружение положения пускового узла 3750 в реальном времени. Хотя в представленном варианте осуществления используются четыре резистивные области, допускается использование любого приемлемого числа резистивных областей.
Средства для обнаружения момента достижения пусковым узлом положения в конце хода могут также быть размещены внутри узла рукоятки хирургического сшивающего инструмента. Узел 4100 рукоятки показан на ФИГ. 44. Узел 4100 рукоятки содержит двигатель 4110 и узел 4130 зубчатой передачи. Пусковой элемент 4150 функционально связан с узлом 4130 зубчатой передачи. Чтобы привести в действие двигатель 4110, можно использовать приводимый в действие пользователем пусковой исполнительный механизм 4111, чтобы привести в действие узел 4130 зубчатой передачи и, следовательно, привести в действие пусковой элемент 4150. Узел 4100 рукоятки также содержит полость 4121, выполненную с возможностью размещения датчика. Датчик может быть выполнен с возможностью обнаружения положения, скорости и/или ускорения пускового элемента 4150. Пусковой элемент 4150 содержит метки 4151. Метки 4151 могут быть, например, напечатаны на пусковом стержне 4153. В альтернативном варианте осуществления метки могут быть, например, вытравлены в пусковом элементе 4150. Пусковой элемент 4150 может быть выполнен из любого приемлемого материала, например такого как пластмасса, стеклопластик, нержавеющая сталь и/или стекло. В качестве датчика может использоваться любой приемлемый датчик, выполненный с возможностью восприятия меток 4151 пускового стержня 4150. Метки 4151, выполненные с возможностью обнаружения с помощью датчика, расположенного внутри полости 4121, могут проходить в продольном направлении вдоль пускового элемента 4150 в любом приемлемом положении на любой приемлемой его стороне. Датчик может быть расположен внутри полости 4121 для восприятия меток 4151 пускового элемента 4150 при перемещении пускового элемента 4150 в продольном направлении внутри хирургического сшивающего инструмента.
Другая система, выполненная с возможностью обнаружения положения, скорости и/или ускорения пускового узла, может содержать слышимые и/или тактильные средства, выполненные с возможностью уведомления пользователя хирургического инструмента о положении, скорости и/или ускорении пускового элемента с применением звука и/или вибрации. На ФИГ. 45-46 показан частичный вид пускового узла 4200 для применения с хирургическим сшивающим инструментом. Пусковой узел 4200, по меньшей мере, частично расположенный внутри узла рукоятки инструмента, например, выполнен с возможностью выталкивания множества скоб, хранящихся в концевом эффекторе с возможностью извлечения. Пусковой узел 4200 содержит пусковой элемент 4250, ведущую шестерню 4215 и двигатель 4210. Двигатель 4210 закреплен на раме рукоятки или шасси 4220. Двигатель 4210 выполнен с возможностью приведения в действие с помощью приводимого в движение пользователем пускового исполнительного механизма хирургического инструмента с целью приведения в движение или вращения ведущей шестерни 4215. Пусковой элемент 4250 содержит продольный массив приводных зубцов 4255, функционально связанных с ведущей шестерней 4215. При приведении в движение с помощью двигателя 4210 в первом направлении ведущая шестерня 4215 приводит в движение пусковой элемент 4250 в дистальном направлении к концевому эффектору. Пусковой элемент 4250 дополнительно содержит продольный массив тактильно различимых ребер или зубцов 4251, выполненных с возможностью взаимодействия с тактильно различимой пружиной 4256, закрепленной на раме 4220 рукоятки. Каждый раз при соударении, отклонении тактильно различимого ребра 4251 и прохождении тактильно различимой пружины 4256 возникает слышимый щелчок и/или вибрация.
В дополнение к указанному выше при выдвижении пускового элемента 4250 дистально пользователь хирургического инструмента получает, например, звуковое уведомление о состоянии пускового узла 4250 при взаимодействии тактильно различимых ребер 4251 с тактильно различимой пружиной 4255. Если пусковой элемент 4250 перемещается с постоянной скоростью, частота, с которой раздаются щелчки, будет постоянной. Если пусковой элемент 4250 ускоряется, частота, с которой раздаются щелчки, будет увеличиваться. Если пусковой элемент 4250 замедляется, частота, с которой раздаются щелчки, будет уменьшаться. Тактильно различимые ребра 4251 содержат более плотно расположенную конструкцию 4252 на проксимальном конце 4257 пускового элемента 4250 по сравнению с тактильно различимыми ребрами 4251, расположенными дистально относительно проксимального конца 4257. При заданной скорости пускового элемента 4250 тактильно различимые ребра 4251, расположенные на проксимальном конце 4257 пускового элемента 4250, т. е. ребра 4252, инициируют звуковое уведомление, создаваемое тактильно различимой пружиной 4256, которое отличается от уведомления, создаваемого тактильно различимой пружиной 4256 при взаимодействии тактильно различимой пружины 4256 с тактильно различимыми ребрами 4251, расположенными дистально относительно проксимального конца 4257. В, по меньшей мере, одном таком примере ребра 4252 увеличивают частоту слышимых щелчков и/или вибраций, ощущаемых пользователем. Если пользователь хирургического инструмента слышит, что вызываемые ребрами 4252 щелчки учащаются, он может понять, что пусковой элемент 4250 приближается или достиг конца пускового хода. В таких примерах пользователь высвобождает пусковой исполнительный механизм, который приводит в движение электрический двигатель 4210, чтобы остановить пусковой элемент 4250. В примерах, где пусковой исполнительный механизм содержит регулятор скорости двигателя 4210, пользователь может ослабить давление, прилагаемое к пусковому исполнительному механизму, чтобы замедлить двигатель 4210 перед высвобождением пускового исполнительного механизма с целью остановки двигателя 4210. В этот момент пусковой элемент 4250 может втягиваться проксимально за счет работы двигателя 4210 во втором или противоположном направлении.
Как описано выше, продольный массив ребер может включать в себя две части - первую часть, которая образует базу обратной связи, и вторую часть, которая обеспечивает отклонение в обратной связи. Предусмотрены другие варианты осуществления, которые содержат базовую обратную связь и более чем одну дополнительную обратную связь, которая отличается от базовой обратной связи. В различных примерах конечная обратная связь может содержать, например, учащение слышимых щелчков и/или вибраций, например при приближении пускового элемента к положению в конце хода.
Слышимые щелчки и/или вибрации или тактильная обратная связь, описанные выше со ссылкой на варианты осуществления на ФИГ. 45 и 46, генерируются внутри и исходят из рукоятки хирургического инструмента.Помимо или вместо указанного выше слышимые щелчки и/или вибрации могут генерироваться и исходить из ствола и/или концевого эффектора хирургического инструмента. Как показано на ФИГ. 48, режущий элемент 4452 выполнен с возможностью взаимодействия с продольным массивом ребер, расположенных в первой бранше 4410 концевого эффектора 4400, при выдвижении режущего элемента 4456 дистально. Аналогично указанному выше ребра могут указывать положение режущего элемента 4452 путем генерирования щелкающих звуков и/или вибраций при прохождении режущего элемента 4452. Продольный массив ребер 4455 содержит первый участок 4455, который содержит ребра, расположенные на первом расстоянии друг от друга, второй участок 4456, который содержит ребра, расположенные на втором расстоянии друг от друга, и третий участок 4457, который содержит ребра, расположенные на третьем расстоянии друг от друга. Например, второе расстояние короче первого расстояния, а третье расстояние короче второго расстояния. Режущий элемент 4452 содержит проходящее от него тактильно различимое утолщение 4454, которое выполнено с возможностью взаимодействия и скольжения поперек ребер, генерируя щелкающий звук и/или вибрацию для каждого ребра, с которым контактирует тактильно различимое утолщение 4454. При заданной скорости режущего элемента 4452 на первом участке 4455 щелчки и/или вибрации будут генерироваться с первой частотой, на втором участке 4456 щелчки и/или вибрации будут генерироваться со второй частотой, а на третьем участке 4457 щелчки и/или вибрации будут генерироваться с третьей частотой. Например, вторая частота больше первой частоты, а третья частота больше второй частоты. Например, слышимое повышение темпа щелчков указывает пользователю, что режущий элемент 4452 приближается к положению в конце хода. Пользователь может отреагировать на эту обратную связь путем замедления и/или остановки режущего элемента 4452.
На ФИГ. 47 представлен частичный вид узла рукоятки. Узел 4300 рукоятки содержит узел 4320 привода для применения в сочетании с узлом 4330 муфты, выполненным с возможностью ограничения величины крутящего момента, передаваемого пусковому элементу 4350 узла 4320 привода. Узел 4320 привода содержит электрический двигатель, планетарную передачу 4331, функционально связанную с выходным стволом электрического двигателя, ствол 4332 муфты, ведущий диск 4334 муфты сцепления, отпускную пружину 4333, выходной ствол 4338, выходную шестерню 4339 и пусковой элемент 4350. Электрический двигатель приводит в движение планетарную передачу 4331 для вращения ствола 4332 муфты. Следует также понимать, что ствол 4332 муфты может быть приведен в движение вручную, например с помощью заводной рукоятки. Вал 4332 муфты связан с ведущим диском 4334 муфты сцепления таким образом, что вращение ствола 4332 муфты передается ведущему диску 4334 муфты сцепления. Более конкретно, ведущий диск 4334 муфты сцепления сцеплен со стволом 4332 муфты таким образом, что ведущий диск 4334 муфты сцепления выполнен с возможностью вращения вместе со стволом 4332 муфты; однако ведущий диск 4334 муфты сцепления выполнен с возможностью скольжения относительно ствола 4322 муфты. Как более подробно описано ниже, ведущий диск 4334 муфты сцепления содержит зубцы 4336, выполнен с возможностью функционального взаимодействия и функционального освобождения от зубцов 4337 на выходном стволе 4338. Когда зубцы 4336 ведущего диска 4334 муфты сцепления функционально взаимодействуют с зубцами 4337 выходного ствола 4338, вращение ведущего диска 4334 муфты сцепления передается выходному стволу 4338. Выходная шестерня 4339 связана с выходным стволом 4338 таким образом, что вращение выходного ствола 4338, при его наличии, передается выходной шестерне 4339. Выходная шестерня 4339 функционально взаимодействует с пусковым элементом 4350 для выдвижения пускового элемента 4350 дистально и/или втягивания пускового элемента 4350 проксимально в зависимости от направления вращения выходной шестерни 4339.
В дополнение к указанному выше отпускная пружина 4333 смещает ведущий диск 4334 муфты сцепления в зацепление с выходным стволом 4338. Более конкретно, отпускная пружина 4333 смещает зубцы 4336 ведущего диска 4334 муфты сцепления в функциональное зацепление с зубцами 4337 выходного ствола 4338. Благодаря наклоненным поверхностям на зубцах 4336, 4337 зубцы 4336, 4337 могут толкать ведущий диск 4334 муфты сцепления от выходного ствола 4338 при передаче между ними рабочей нагрузки. Отпускная пружина 4333 может быть выполнена с возможностью работы с определенной или предварительно заданной рабочей нагрузкой, действующей между ведущим диском 4334 муфты сцепления и выходным стволом 4338. Такая предварительно заданная рабочая нагрузка является достаточной для работы концевого эффектора хирургического инструмента в нормальных рабочих условиях. Например, предварительно заданная рабочая нагрузка является достаточной для выталкивания и надлежащей деформации скоб, хранящихся в кассете со скобами с возможностью извлечения, и рассечения подлежащей сшиванию ткани. Например, при заклинивании пускового элемента 4350 двигатель может попытаться передать большую рабочую нагрузку, чем предварительно заданная рабочая нагрузка, через узел муфты. В таких примерах отпускная пружина 4333 преодолевается, и ведущий диск 4334 муфты сцепления выталкивается из зацепления с выходным стволом 4338. В такой точке ведущий диск 4334 муфты сцепления может вращаться относительно выходного ствола 4338 без передачи или, по меньшей мере, по существу без передачи соответствующего поворотного перемещения между ними.
В дополнение к указанному выше, когда пусковой элемент 4350 достигает конца пускового хода, пусковой элемент 4350 может, например, упираться в дистальный конец кассеты со скобами. В таких обстоятельствах дистальный конец кассеты со скобами останавливает выдвижение пускового элемента 4350, и аналогично указанному выше зубцы 4336 ведущего диска 4334 муфты сцепления соскальзывают относительно зубцов 4337 выходного ствола 4338 и/или выходят из зацепления в результате передачи повышенного крутящего момента от электрического двигателя ведущему диску 4334 муфты сцепления в попытке выдвинуть пусковой элемент 4350 дальше дистально. Сила отпускной пружины 4333, прилагаемая к ведущему диску 4334 муфты сцепления, недостаточно велика, чтобы удержать зубцы 4336 ведущего диска 4334 муфты сцепления и зубцы 4337 выходного ствола 4338 в зацеплении для приведения в действие выходной шестерни 4339. Например, при работе электрического двигателя в противоположном направлении происходит сброс крутящего момента, передаваемого сопряжению муфты и обеспечивающего скольжение муфты, и выход зубцов 4336 из зацепления с зубцами 4337 для втягивания пускового элемента 4350 проксимально.
Другой вариант осуществления может содержать датчик, расположенный внутри пускового узла и выполненный с возможностью обнаружения силы, воздействующей на пусковой узел при достижении пусковым узлом дистального конца концевого эффектора. Ограничитель на дистальном конце концевого эффектора может быть выполнен с возможностью сдерживания дистального перемещения узла пускового элемента. Ограничитель может быть выполнен с возможностью обеспечения известного профиля силы сопротивления, в котором контроллер хирургического инструмента выполнен с возможностью обнаружения и/или измерения для уведомления пользователя о том, что пусковой узел находится в положении в конце хода. Отличающиеся профили силы возникают в зависимости от конструкции ограничителя. Ограничитель может быть ломким и выполненным с разрывами для обеспечения разрыва материала после достижения пусковым узлом положения в конце пускового хода. Ступенчатый ограничитель может быть выполнен с возможностью постепенного прекращения перемещения режущего элемента. Как только режущий элемент контактирует с дистальной стенкой ступенчатого ограничителя, пусковой узел достигает самого дистального положения. Контроллер может определять первую ожидаемую силу, чтобы уведомить пользователя хирургического инструмента о том, что узел пускового элемента приближается к положению в конце хода. Контроллер может также определять вторую ожидаемую силу, воздействию которой подвергается пусковой элемент, когда пусковой элемент достигает положения в конце хода.
Примеры
Пример 1. Система хирургического инструмента, содержащая концевой эффектор, имеющий упор, кассету со скобами, содержащую проксимальный конец, дистальный конец, множество полостей для скоб и множество скоб, хранящихся в полостях для скоб с возможностью извлечения, и салазки, выполненные с возможностью скольжения внутри кассеты со скобами для перемещения скоб к упору. Система хирургического инструмента дополнительно содержит пусковой элемент, выполненный с возможностью перемещения относительно кассеты со скобами для перемещения салазок от проксимального конца к дистальному концу кассеты со скобами во время пускового хода, ствол, образующий продольную ось, шарнирное сочленение, причем концевой эффектор связан со стволом с возможностью поворота вокруг шарнирного сочленения между шарнирно неповернутым положением и шарнирно повернутым положением, и средства для регулирования длины пускового хода в зависимости от величины угла шарнирного поворота концевого эффектора относительно продольной оси.
Пример 2. Система хирургического инструмента по примеру 1, дополнительно содержащая средства для определения положения пускового элемента во время пускового хода.
Пример 3. Система хирургического инструмента по примеру 2 или 3, дополнительно содержащая средства измерения величины угла шарнирного поворота концевого эффектора относительно продольной оси.
Пример 4. Система хирургического инструмента по примеру 3, дополнительно содержащая гибкий пусковой стержень, проходящий через шарнирное сочленение, причем гибкий пусковой стержень содержит множество боковых участков, и при этом средства измерения содержат средства для обнаружения взаимных положений боковых участков.
Пример 5. Система хирургического инструмента по примеру 3 или 4, в которой средства регулирования содержат контроллер в соединении со средствами измерения, причем контроллер выполнен с возможностью регулирования длины пускового хода на основании обратной связи от средств измерения.
Пример 6. Система хирургического инструмента по примерам 1, 2, 3, 4 или 5, в которой средства регулирования содержат устройство сдвига пускового пути.
Пример 7. Система хирургического инструмента, содержащая концевой эффектор, имеющий упор и кассету со скобами, содержащую множество полостей для скоб и множество скоб, хранящихся в полостях для скоб с возможностью извлечения; ствол, образующий продольную ось, и шарнирное сочленение, причем концевой эффектор соединен со стволом в области шарнирного сочленения с возможностью поворота между шарнирно неповернутым положением и множеством шарнирно повернутых положений относительно продольной оси. Система хирургического инструмента дополнительно содержит гибкий пусковой стержень, проходящий через шарнирное сочленение, при этом гибкий пусковой стержень содержит проксимальный конец, расположенный проксимально относительно шарнирного сочленения, дистальный конец, расположенный дистально относительно шарнирного сочленения, и множество боковых участков, проходящих через шарнирное сочленение, при этом боковые участки выполнены с возможностью сдвига относительно друг друга на проксимальном конце при перемещении концевого эффектора в шарнирно повернутое положение. Система хирургического инструмента дополнительно содержит датчик, выполненный с возможностью обнаружения сдвига между первым боковым участком и вторым боковым участком на проксимальном конце гибкого пускового стержня.
Пример 8. Система хирургического инструмента по примеру 7, в которой датчик содержит датчик на эффекте Холла, и при этом на гибком пусковом стержне расположен, по меньшей мере, один магнит.
Пример 9. Система хирургического инструмента по примеру 7 или 8, в которой датчик содержит датчик линейных перемещений.
Пример 10. Система хирургического инструмента по примерам 7, 8 или 9, в которой датчик содержит поворотный энкодер.
Пример 11. Система хирургического инструмента по примерам 7, 8, 9 или 10, в которой датчик содержит гибкую ленту, содержащую электроактивный полимер.
Пример 12. Система хирургического инструмента по примерам 7, 8, 9, 10 или 11, в которой датчик содержит, по меньшей мере, один первый контакт на первом боковом участке и, по меньшей мере, один второй контакт на втором боковом участке, при этом второй боковой участок расположен смежно с первым боковым участком.
Пример 13. Система хирургического инструмента, содержащая концевой эффектор, имеющий упор и кассету со скобами, содержащую множество полостей для скоб и множество скоб, хранящихся в полостях для скоб с возможностью извлечения; ствол, образующий продольную ось; шарнирное сочленение, причем концевой эффектор соединен со стволом в области шарнирного сочленения с возможностью поворота между шарнирно неповернутым положением и, по меньшей мере, одним шарнирно повернутым положением относительно продольной оси; гибкий пусковой элемент, проходящий через шарнирное сочленение, при этом гибкий пусковой элемент содержит множество боковых участков, и при этом боковые участки выполнены с возможностью сдвига относительно друг друга при перемещении концевого эффектора в, по меньшей мере, одно шарнирно повернутое положение; и смягчающий элемент, выполненный с возможностью приспосабливания к сдвигу боковых участков гибкого пускового элемента. Пример 14. Система хирургического инструмента по примеру 13, дополнительно содержащая жесткий пусковой шток, проходящий через ствол, причем жесткий пусковой шток связан с гибким пусковым элементом, и при этом между гибким пусковым элементом и жестким пусковым штоком расположен смягчающий элемент.
Пример 15. Система хирургического инструмента по примеру 13 или 14, в которой гибкий пусковой элемент выполнен из первого материала, имеющего первую твердость по дюрометру, причем смягчающий элемент выполнен из второго материала, имеющего вторую твердость по дюрометру, и при этом вторая твердость по дюрометру меньше первой твердости по дюрометру.
Пример 16. Система хирургического инструмента по примерам 13, 14 или 15, в которой кассета со скобами дополнительно содержит салазки, выполненные с возможностью скольжения внутри кассеты со скобами для перемещения скоб к упору, и при этом между салазками и гибким пусковым элементом расположен смягчающий элемент.
Пример 17. Система хирургического инструмента по примерам 13, 14, 15 или 16, в которой через, по меньшей мере, часть кассеты со скобами сформирован продольный паз, и при этом смягчающий элемент содержит перемычку, проходящую через продольный паз.
Пример 18. Система хирургического инструмента по примерам 13, 14, 15, 16 или 17, в которой смягчающий элемент содержит хрупкий элемент.
Пример 19. Система хирургического инструмента по примерам 13, 14, 15, 16, 17 или 18, в которой кассета со скобами содержит дистальную торцевую стенку, и при этом смягчающий элемент содержит, по меньшей мере, одно сквозное отверстие в дистальной торцевой стенке.
Пример 20. Система хирургического инструмента по примерам 13, 14, 15, 16, 17, 18 или 19, в которой смягчающий элемент содержит жесткий ограничитель, содержащий множество ступенек.
Описание каждого из представленных ниже документов полностью включено в настоящий документ путем ссылки:
• патента США № 5,403,312, озаглавленного ELECTROSURGICAL HEMOSTATIC DEVICE, выданного 4 апреля 1995 г.;
• патента США № 7,000,818, озаглавленного SURGICAL STAPLING INSTRUMENT HAVING SEPARATE DISTINCT CLOSING AND FIRING SYSTEMS, выданного 21 февраля 2006 г.;
• патента США № 7,422,139, озаглавленного MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK, выданного 9 сентября 2008 г.;
• патента США № 7,464,849, озаглавленного ELECTRO-MECHANICAL SURGICAL INSTRUMENT WITH CLOSURE SYSTEM AND ANVIL ALIGNMENT COMPONENTS, выданного 16 декабря 2008 г.;
• патента США № 7,670,334, озаглавленного SURGICAL INSTRUMENT HAVING AN ARTICULATING END EFFECTOR, выданного 2 марта 2010 г.;
• патента США № 7,753,245, озаглавленного SURGICAL STAPLING INSTRUMENTS, выданного 13 июля 2010 г.;
• патента США № 8,393,514, озаглавленного SELECTIVELY ORIENTABLE IMPLANTABLE FASTENER CARTRIDGE, выданного 12 марта 2013 г.;
• заявки на патент США № 11/343,803, озаглавленной SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES; в настоящее время патент США № 7,845,537;
• заявки на патент США № 12/031,573, озаглавленной SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING RF ELECTRODES, поданной 14 февраля 2008 г.;
• заявки на патент США № 12/031,873, озаглавленной END EFFECTORS FOR A SURGICAL CUTTING AND STAPLING INSTRUMENT, поданной 15 февраля 2008 г., в настоящее время патент США № 7,980,443;
• заявки на патент США № 12/235,782, озаглавленной MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT, в настоящее время патент США № 8,210,411;
• заявки на патент США № 12/249,117, озаглавленной POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLY RETRACTABLE FIRING SYSTEM, в настоящее время патент США № 8,608,045;
• заявки на патент США № 12/647,100, озаглавленной MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT WITH ELECTRIC ACTUATOR DIRECTIONAL CONTROL ASSEMBLY, поданной 24 декабря 2009 г.; в настоящее время патент США № 8,220,688;
• заявки на патент США № 12/893,461, озаглавленной STAPLE CARTRIDGE, поданной 29 сентября 2012 г., в настоящее время патент США № 8,733,613;
• заявки на патент США № 13/036,647, озаглавленной SURGICAL STAPLING INSTRUMENT, поданной 28 февраля 2011 г., в настоящее время патент США № 8,561,870;
• заявки на патент США № 13/118,241, озаглавленной SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS, в настоящее время публикация заявки на патент США № 2012/0298719;
• заявки на патент США № 13/524,049, озаглавленной ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE; поданной 15 июня 2012 г.; в настоящее время публикация заявки на патент США № 2013/0334278;
• заявки на патент США № 13/800,025, озаглавленной STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданной 13 марта 2013 г.;
• заявки на патент США № 13/800 067, озаглавленной STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданной 13 марта 2013 г.;
• публикации заявки на патент США № 2007/0175955, озаглавленной SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISM, поданной 31 января 2006 г.; и
• публикации заявки на патент США № 2010/0264194, озаглавленной SURGICAL STAPLING INSTRUMENT WITH AN ARTICULATABLE END EFFECTOR, поданной 22 апреля 2010 г., в настоящее время патент США № 8,308,040.
Хотя в настоящем документе описаны различные варианты осуществления устройств в их связи с определенными описанными вариантами осуществления, в отношении устройства могут быть реализованы различные модификации и изменения. Кроме того, в случае некоторых компонентов, для которых представлено описание материалов, можно применять другие материалы. Кроме того, в соответствии с различными вариантами осуществления один компонент может быть заменен множеством компонентов, а множество компонентов - одним компонентом (для выполнения определенных функций). Предполагается, что представленное выше описание и приложенная формула изобретения охватывают все указанные изменения и дополнения.
Устройства, описанные в настоящем документе, могут быть выполнены с возможностью утилизации после однократного применения, или они могут быть выполнены с возможностью многократного применения. Однако в любом случае устройство можно восстановить для повторного применения после, по меньшей мере, одного применения. Восстановление может включать в себя любую комбинацию стадий разборки устройства, последующей очистки или замены конкретных частей и последующей повторной сборки. В частности, устройство можно разобрать и любое число конкретных деталей или частей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей устройство можно снова собрать для последующего применения либо в мастерской по восстановлению, либо силами хирургической бригады непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что для восстановления устройства можно использовать различные методики разборки, очистки, замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство целиком входят в объем настоящей заявки.
Предпочтительно описанный в настоящем документе предмет изобретения будет проходить обработку перед проведением хирургического вмешательства. Сначала, после получения нового или уже использованного инструмента, его при необходимости очищают. Затем инструмент можно стерилизовать. Согласно одному способу стерилизации инструмент помещают в закрытую и герметичную тару, такую как пластиковый пакет или пакет Тайвек (TYVEK). Затем тару и инструмент помещают в поле излучения, которое может проникать в тару, такого как гамма-излучение, рентгеновское излучение или быстрые электроны. Излучение уничтожает бактерии на инструменте и в таре. Стерилизованный инструмент может затем храниться в стерильной таре. Герметичная тара сохраняет инструмент стерильным до его вскрытия в медицинском учреждении.
Хотя настоящее изобретение описано как имеющее примеры конфигураций, настоящее изобретение можно дополнительно модифицировать в пределах сущности и объема описания. Следовательно, предполагается, что настоящая заявка охватывает все возможные вариации, способы применения или адаптации изобретения с применением его общих принципов.
Любой патент, публикация или другой материал описания, полностью или частично, который указан как включенный в настоящий документ путем ссылки, включен в настоящий документ только в той степени, в какой включенный материал не противоречит существующим определениям, положениям или другому материалу описания, представленному в настоящем документе. Таким образом, описание, в прямой форме представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей материалу, включенному в настоящий документ путем ссылки. Любой материал или его часть, указанная как включенная в настоящий документ путем ссылки, но противоречащая существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включена в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Реферат
Группа изобретений относится к медицинской технике, а именно к хирургическим сшивающим и режущим инструментам и предназначенным для применения с ними кассетам со скобами. Система хирургического сшивающего инструмента содержит концевой эффектор, ствол, шарнирное сочленение, гибкий пусковой стержень, боковые участки и датчик. Концевой эффектор содержит упор и кассету со скобами. Кассета со скобами содержит полости для скоб и скобы, хранящиеся в полостях для скоб с возможностью извлечения. Ствол образует продольную ось. Концевой эффектор соединен со стволом в области шарнирного сочленения с возможностью поворота между шарнирно неповернутым положением и шарнирно повернутыми положениями относительно продольной оси. Гибкий пусковой стержень проходит через шарнирное сочленение. Гибкий пусковой стержень содержит проксимальный конец и дистальный конец. Проксимальный конец расположен проксимально относительно шарнирного сочленения. Дистальный конец расположен дистально относительно шарнирного сочленения. Боковые участки проходят через шарнирное сочленение. Боковые участки выполнены с возможностью сдвига относительно друг друга на проксимальном конце при перемещении концевого эффектора в шарнирно повернутое положение. Датчик выполнен с возможностью обнаружения сдвига между первым боковым участком и вторым боковым участком на проксимальном конце гибкого пускового стержня. Во втором варианте выполнения система хирургического сшивающего инструмента содержит концевой эффектор, ствол, шарнирное сочленение, гибкий пусковой элемент и смягчающий элемент. Концевой эффектор содержит упор и кассету со скобами. Кассета со скобами содержит полости для скоб и скобы, хранящиеся в полостях для скоб с возможностью извлечения. Ствол образует продольную ось. Концевой эффектор соединен со стволом в области шарнирного сочленения с возможностью поворота между шарнирно неповернутым положением и по меньшей мере одним шарнирно повернутым положением относительно продольной оси. Гибкий пусковой элемент проходит через шарнирное сочленение. Гибкий пусковой элемент содержит боковые участки. Боковые участки выполнены с возможностью сдвига относительно друг друга при перемещении концевого эффектора в по меньшей мере одно шарнирно повернутое положение. Смягчающий элемент выполнен с возможностью приспосабливания к сдвигу боковых участков гибкого пускового элемента. Изобретения характеризуются определением угла поворота шарнирного сочленения. 2 н. и 12 з.п. ф-лы, 53 ил.
Формула
Документы, цитированные в отчёте о поиске
Усовершенствование приводного хирургического сшивающего инструмента
Комментарии