Система для определения положения медицинского инструмента - RU2472435C2
Код документа: RU2472435C2
Чертежи
Описание
Изобретение относится к системе для определения пространственного положения и/или ориентации медицинского инструмента, содержащей излучающий электромагнитное излучение передающий блок, по меньшей мере, один расположенный на медицинском инструменте локализационный элемент, который принимает излучаемое передающим блоком электромагнитное излучение и создает локализационный сигнал, и блок оценки, который определяет положение и/или ориентацию медицинского инструмента посредством оценки локализационного сигнала.
В медицине в различных диагностических и терапевтических способах большое значение имеет точное определение положения применяемого медицинского инструмента. Эти инструменты могут быть, например, интраваскулярными катетерами, направляющими проволоками, иглами для биопсии, минимально инвазивными хирургическими инструментами или т.п. Особенно большой интерес представляют системы для определения пространственной ориентации или положения медицинского инструмента в области инвазивной радиологии.
Система указанного в начале вида известна, например, из ЕР 0655138 В1. В известной системе используется несколько передающих блоков, которые расположены в заданных местах с распределением в пространстве. Передающие блоки излучают электромагнитное излучение, при необходимости с различной частотой каждый. Для определения местоположения медицинского инструмента на нем расположен локализационный элемент в виде сенсора, который принимает излучаемое передающим блоком электромагнитное излучение. Сенсор измеряет создаваемое передающими блоками электромагнитное поле. Создаваемый сенсором локализационный сигнал соответствует силе электромагнитного поля в месте датчика и тем самым в месте медицинского инструмента, в котором расположен сенсор. Локализационный сигнал подается в оценочный блок. Оценочный блок вычисляет из локализационного сигнала расстояние сенсора до различных передающих блоков. Поскольку передающие блоки находятся в заданных положениях в пространстве, то оценочное устройство может вычислять из расстояний локализационного элемента до различных передающих блоков положение медицинского инструмента в пространстве.
Известная система имеет тот недостаток, что локализационный элемент соединен через кабель с блоком оценки. Через кабель принятый от локализационного элемента сигнал, который отображает силу поля электромагнитного излучения в месте локализационного элемента, подается в блок оценки. В частности, для определения положения медицинского инструмента для минимально инвазивного вмешательства такие кабельные соединения представляют большой недостаток. Снабжение минимально инвазивных инструментов электрическими проводами и соответствующими разъемными соединениями является сложным и поэтому дорогим. Кроме того, электрические провода создают помехи при обращении с инструментами.
С учетом этого задачей изобретения является создание улучшенной системы для определения пространственного положения и/или ориентации медицинского инструмента. Прежде всего, система не должна иметь кабельных соединений между локализационным элементом и блоком оценки.
Эта задача решена, согласно изобретению, исходя из системы указанного в начале вида тем, что локализационный элемент имеет приемопередатчик, который содержит антенну и соединенную с антенной схему для приема и передачи электромагнитного излучения, при этом схема возбуждается с помощью принятого через антенну электромагнитного излучения передающего блока, а именно так, что она передает через антенну локализационный сигнал в виде электромагнитного излучения.
Основная идея изобретения состоит в снабжении медицинского инструмента приемопередатчиком, который применяется, например, в известных метках RFID (радиочастотная идентификация), которые можно с небольшими затратами приспособить к использованию, согласно изобретению. Очень небольшие приемопередатчики RFID являются в настоящее время коммерчески доступными. Антенну приемопередатчика можно для интегрирования в медицинский инструмент наматывать в виде катушки из тонкого провода, при этом направление намотки и геометрию катушки можно согласовывать с формой и величиной медицинского инструмента.
Приемопередатчик локализационного элемента работает в системе согласно изобретению так же, как известный приемопередатчик RFID. Передающий блок создает (высокочастотное) электромагнитное поле, которое принимает антенна приемопередатчика. В антенной катушке возникает индукционный ток. Он приводит в действие схему приемопередатчика. При включении схемы она передает в свою очередь (высокочастотное) электромагнитное излучение, например, за счет того, что она модулирует передаваемое передающим блоком поле (с помощью модуляции нагрузкой). За счет модуляции передаваемое приемопередатчиком электромагнитное излучение лежит в боковой полосе излучения передающего блока. В этой боковой полосе локализационный сигнал передается без кабельного соединения, т.е. без проводов, в блок оценки для определения положения.
Приемопередатчик системы согласно изобретению может быть выполнен в виде пассивного приемопередатчика, при этом электроснабжение схемы происходит за счет индукционного тока, создаваемого в антенне излучаемым передающим блоком электромагнитным излучением. Этот вариант выполнения системы согласно изобретению, имеет то преимущество, что приемопередатчик работает без собственного активного электроснабжения. Энергия, которая необходима для схемы приемопередатчика для передачи локализационного сигнала, обеспечивается создаваемым передающим блоком электромагнитным полем. Для электроснабжения схемы приемопередатчик целесообразно имеет конденсатор, который заряжается создаваемым в антенне индукционным током. Конденсатор обеспечивает длительное снабжение энергией схемы. Для зарядки конденсатора медицинский инструмент можно располагать вблизи передающего блока, где создаваемое передающим блоком электромагнитное поле является достаточно сильным. После зарядки конденсатора приемопередатчик работает определенное время на большем расстоянии от передающего блока. Поскольку электроснабжение обеспечивается с помощью конденсатора, то антенну приемопередатчика можно выполнять очень небольшой, что облегчает интегрирование в медицинский инструмент.
В качестве альтернативного решения, приемопередатчик в системе согласно изобретению может быть выполнен также в виде активного приемопередатчика, при этом для электроснабжения схемы предусмотрена батарея. Включение приемопередатчика целесообразно осуществляется в начале медицинского вмешательства, например, при открывании упаковки медицинского инструмента. В качестве альтернативного решения, схема приемопередатчика выполняется так, что батарея включается лишь при приеме излучаемого передающим блоком электромагнитного излучения.
Согласно одному целесообразному варианту выполнения системы согласно изобретению частота электромагнитного излучения локализационного сигнала отличается от частоты излучаемого передающим блоком электромагнитного излучения. Это позволяет отличать передаваемый приемопередатчиком локализационный сигнал от создаваемого передающим блоком электромагнитного поля на основе частоты. Это можно реализовать, как указывалось выше, за счет того, что приемопередатчик создает локализационный сигнал посредством модуляции излучаемого передающим блоком электромагнитного излучения. В этом случае локализационный сигнал лежит в боковой полосе частоты излучаемого передающим блоком электромагнитного излучения.
Согласно одной предпочтительной модификации системы согласно изобретению блок оценки соединен, по меньшей мере, с одним приемным блоком. Можно применять несколько приемных блоков, которые принимают передаваемый приемопередатчиком локализационный сигнал. Из силы поля локализационного сигнала в месте каждого приемного блока можно делать заключение о расстоянии приемопередатчика от приемного блока. Когда известны расстояния приемопередатчика от различных приемных блоков, которые находятся в заданных положениях в пространстве, можно из них вычислять с помощью блока оценки точное положение в пространстве приемопередатчика и тем самым медицинского инструмента.
Однако проблемой является ослабление локализационного сигнала, когда медицинский инструмент при вмешательстве вводится в тело пациента. Ткань тела частично поглощает на основании своих диэлектрических свойств излучаемое приемопередатчиком электромагнитное излучение. Поэтому определение положения на основе силы поля локализационного сигнала не всегда возможно с достаточной точностью.
Для решения этой проблемы в блоке оценки для определения положения и/или ориентации медицинского инструмента можно использовать фазовое соотношение электромагнитного излучения локализационного сигнала в каждом месте приемного блока. При правильном выборе частоты локализационного сигнала влияние диэлектрических свойств ткани тела на фазу локализационного сигнала является пренебрежимо малым. Приемопередатчик должен быть выполнен так, что он излучает локализационный сигнал когерентно, т.е. с заданной и постоянной фазой.
Когда определение положения осуществляется, как указывалось выше, на основе фазы электромагнитного излучения локализационного сигнала, необходимо учитывать то, что однозначное соотнесение значения фазы с положением в пространстве возможно лишь внутри расстояния локализационного элемента, которое меньше длины волны локализационного сигнала. При больших расстояниях необходимо дополнительно определять число переходов через ноль электромагнитного излучения локализационного сигнала между локализационным элементом и каждым приемным блоком.
Для обеспечения возможно высокой точности определения положения целесообразно применять для приемопередатчика локализационного элемента в системе согласно изобретению схему, которая выполнена с возможностью создания локализационного сигнала двух или более различных частот. За счет создания локализационного сигнала с меньшими частотами и, соответственно, большими динами волны можно осуществлять сначала грубое, но однозначное определение положения. Для повышения точности определения положения затем осуществляется переход на более высокие частоты или же частота локализационного сигнала повышается постепенно. На более высоких частотах требования к разрешающей способности определения фазы с целью достижения определенного пространственного разрешения меньше. При постепенном увеличении частоты можно определять число переходов через ноль с целью определения точного расстояния между локализационным элементом и приемным блоком. Для максимально точного определения положения можно использовать изменение частоты в обоих направлениях, т.е. от низких к высоким частотам или же от высоких к низким частотам. В зависимости от частотных диапазонов, которые должны перекрываться для определения положения, может быть необходимым предусмотрение двух или более антенн, с которыми соединена схема приемопередатчика, при этом каждая из антенн предназначена для определенного частотного диапазона.
Согласно одной целесообразной модификации системы согласно изобретению приемопередатчик соединен, по меньшей мере, с одним сенсорным элементом, при этом схема приемопередатчика выполнена так, что она передает сенсорный сигнал сенсорного элемента в виде электромагнитного излучения через антенну приемопередатчика. Таким образом, приемопередатчик используется не только для определения положения, но также для передачи сенсорных сигналов. Приемопередатчик соединен с соответствующими сенсорными элементами, например, сенсором температуры, сенсором давления, сенсором значения рН или же с обычным сенсором положения. Приемопередатчик передает сенсорный сигнал без проводов в виде аналогового или цифрового сигнала.
Производительность системы согласно изобретению может быть дополнительно повышена с помощью, по меньшей мере, одного не расположенного на медицинском инструменте, дополнительного локализационного элемента с соответствующим приемопередатчиком, который можно располагать на теле пациента. Дополнительный локализационный элемент можно располагать, например, с помощью клея, липкого соединения или соединения в виде присоски на поверхности кожи пациента. Согласно одному особенно практичному варианту выполнения приемопередатчик дополнительного локализационного элемента интегрирован в самосклеивающуюся фольгу или полоску тонкой бумаги, как в обычном пластыре. С помощью дополнительного локализационного элемента можно положение пациента, соответственно, определенной, представляющей интерес части тела, непосредственно соотносить с положением медицинского инструмента. Это особенно предпочтительно при применении инвазивной радиологии. Кроме того, с помощью дополнительного локализационного элемента обеспечивается возможность учета движений тела пациента при позиционировании медицинского инструмента. Так, например, можно автоматически компенсировать движение дыхания пациента для значительного повышения точности позиционирования иголок при легочной биопсии. Другое применение возможно при лечении коронарных сосудов с помощью выполненного в соответствии с изобретением медицинского инструмента (катетера) для компенсации вызванного дыханием движения сердечной мышцы. Согласно другому аспекту данного изобретения предусматривается также применение метки RFID в самосклеивающейся полосе пленки или ткани для съемного расположения на поверхности кожи пациента.
Систему согласно изобретению можно предпочтительно применять при оперативных вмешательствах с использованием магнитного резонанса. В качестве передающего блока можно целесообразно использовать и без того имеющийся высокочастотный передающий блок прибора магнитного резонанса. Этот блок содержит приемопередающую антенну, например катушку в виде клеточного резонатора, для создания высокочастотного электромагнитного поля в объемах исследования прибора магнитного резонанса. С помощью такого высокочастотного поля, как известно, возбуждаются ядерно-магнитные резонансы в теле подлежащего обследованию пациента при получении изображения магнитного резонанса. В этом случае приемопередатчик целесообразно выполнять в виде пассивного приемопередатчика, при этом электроснабжение схемы приемопередатчика осуществляется с помощью создаваемого в антенне приемопередатчика при приеме высокочастотного поля во время создания изображения магнитного резонанса индукционного тока. Таким образом, для электроснабжения приемопередатчика используется и без того имеющееся в приборе магнитного резонанса высокочастотное поле.
Согласно одной целесообразной модификации системы, блок оценки может быть соединен с прибором магнитного резонанса, соответственно, интегрирован в нем, при этом определение положения и/или ориентации медицинского инструмента осуществляется на основе принимаемого через приемопередающую антенну прибора магнитного резонанса локализационного сигнала. Таким образом, при таком выполнении приемопередающая антенна прибора магнитного резонанса используется для приема локализационного сигнала. Локализационный сигнал передается через приемную электронику прибора магнитного резонанса в блок оценки. Особенно целесообразно, как указывалось выше, определять положение локализационного элемента на основе фазового соотношения локализационного сигнала. В соответствии с этим, соединенный с прибором магнитного резонанса блок оценки может быть предпочтительно выполнен для определения положения и/или ориентации медицинского инструмента на основе фазового соотношения электромагнитного излучения локализационного сигнала в месте приемопередающей антенны прибора магнитного резонанса. Место приемопередающей антенны известно и неизменно. Поэтому это место можно хорошо использовать в качестве опорной точки при определении положения на основе фазового соотношения.
Для медицинских технических систем желателен возможно помехоустойчивый режим работы. Для этого система согласно изобретению может быть выполнена так, что блок оценки (по типу так называемых схем голосования) выполнен с возможностью выбора значимых данных положения и/или ориентации из определенных с избытком из нескольких локализационных сигналов данных положения и/или ориентации. В соответствии с этим сначала из локализационных сигналов определяются избыточные данные положения и/или ориентации, например, за счет того, что в коротких интервалах времени повторно принимаются локализационные сигналы, или за счет того, что локализационные сигналы параллельно принимаются несколькими расположенными на медицинском инструменте приемопередатчиками. Эти избыточные данные подвергаются оценке, сравнению друг с другом и/или проверке на достоверность. В зависимости от результата этой проверки выбираются в качестве значимых, т.е. признанных правильными, данные положения и/или ориентации. Например, можно выбирать те данные положения и/или ориентации, которые более или менее совпадают с другими избыточно определенными данными, в то время как явно отклоняющиеся (выпадающие) данные признаются ошибочными и отбрасываются. Локализационный элемент может иметь, как указывалось выше, несколько приемопередатчиков, которые возбуждаются параллельно и/или последовательно во времени для передачи локализационных сигналов. Это имеет то преимущество, что обеспечивается помехоустойчивая работа даже тогда, когда отдельные приемопередатчики выходят из строя или их сигналы не принимаются или принимаются с искажениями (например, на основании сигналов помех окружения). Это может достигаться также тем, что на медицинском инструменте для создания избыточных локализационных сигналов расположено несколько локализационных элементов. Избыточность для более высокой помехоустойчивости можно также создавать, например, тем, что приемопередатчики для создания локализационных сигналов выполнены для различных частот. В этом случае помехи в одном частотном диапазоне не оказывают отрицательного воздействия на надежную работу системы.
Изобретение относится не только к системе для определения положения, но также к медицинскому инструменту, который снабжен приемопередатчиком указанного выше вида, а также к способу определения пространственного положения и/или ориентации медицинского инструмента.
Основной идеей изобретения является снабжение медицинского инструмента, такого как, например, интраваскулярные катетеры, направляющая проволока или игла для биопсии, активной или пассивной меткой RFID обычного вида для обеспечения за счет этого возможности определения пространственного положения и/или ориентации медицинского инструмента, предпочтительно на основе фазового соотношения создаваемого меткой RFID локализационного сигнала в неподвижном месте приема. Кроме того, метку RFID можно использовать, как указывалось выше, для беспроводной передачи сенсорных сигналов также интегрированного в медицинский инструмент сенсорного элемента. Возможно также применение метки RFID в медицинском имплантате для обеспечения возможности получения с места имплантата в любое время сенсорных сигналов, таких как, например, сигналы температуры, давления, величины рН или положения.
Приемопередатчик согласно изобретению может целесообразно иметь запоминающее устройство, в котором можно хранить данные идентификации, при этом схема выполнена с возможностью передачи данных идентификации в виде электромагнитного излучения через антенну. Обычные метки RFID имеют такие цифровые запоминающие устройства. Данные идентификации можно использовать для отличия друг от друга различных локализационных элементов при определении пространственного положения и/или ориентации. Когда, например, необходимо определять ориентацию медицинского инструмента, т.е. его положения в пространстве, то целесообразно снабжать инструмент, по меньшей мере, двумя выполненными согласно изобретению локализационными элементами. На основании положений обоих локализационных элементов можно судить об ориентации инструмента. Условием является то, что возможна идентификация различных локализационных элементов, для того чтобы можно было отличать, например, расположенный на острие иглы для биопсии локализационный элемент от расположенного на захватной части локализационного элемента. Кроме того, возможность идентификации локализационных элементов является целесообразной, когда при одном вмешательстве используется несколько медицинских инструментов, поскольку тем самым исключаются опасные ошибки при определении положения.
Как указывалось выше, систему согласно изобретению можно использовать вместе с образующим изображение диагностическим прибором, например, компьютерным томографом или прибором магнитного резонанса для обеспечения навигации применяемого инвазивного инструмента. Определяемые с помощью системы, согласно изобретению, данные положения и ориентации можно отображать вместе с отображаемыми анатомическими структурами для облегчения выполняющему вмешательство врачу направления инструмента. При этом с помощью системы согласно изобретению можно предпочтительно определять пространственное положение или ориентацию независимо от создающей изображение системы. Тем самым можно уменьшить нагрузку излучением при минимально инвазивных вмешательствах. А именно, точное позиционирование и навигация инструментов возможны без непрерывного рентгеновского облучения.
Ниже приводится подробное пояснение примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых изображено:
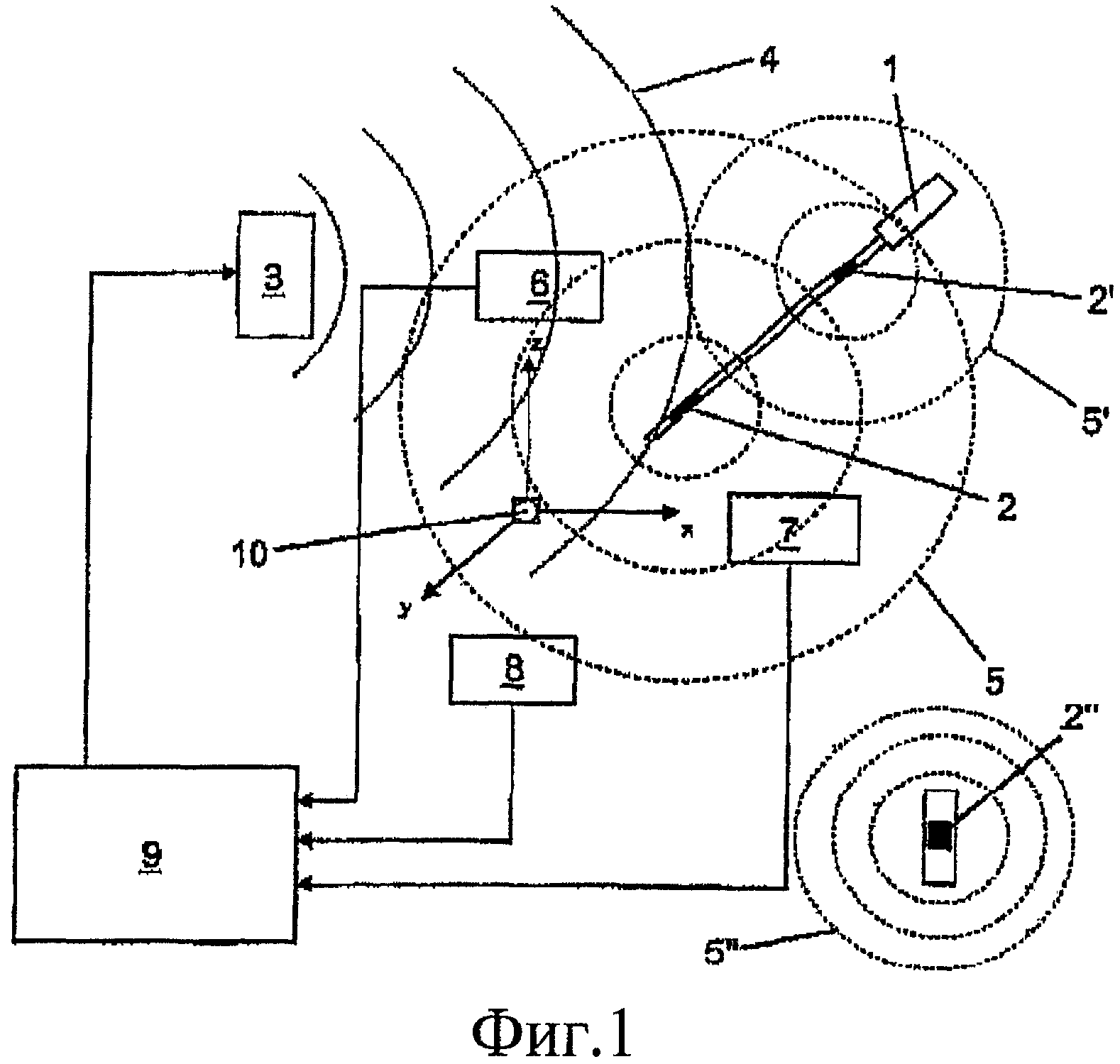
фиг.1 - блок-схема системы согласно изобретению;
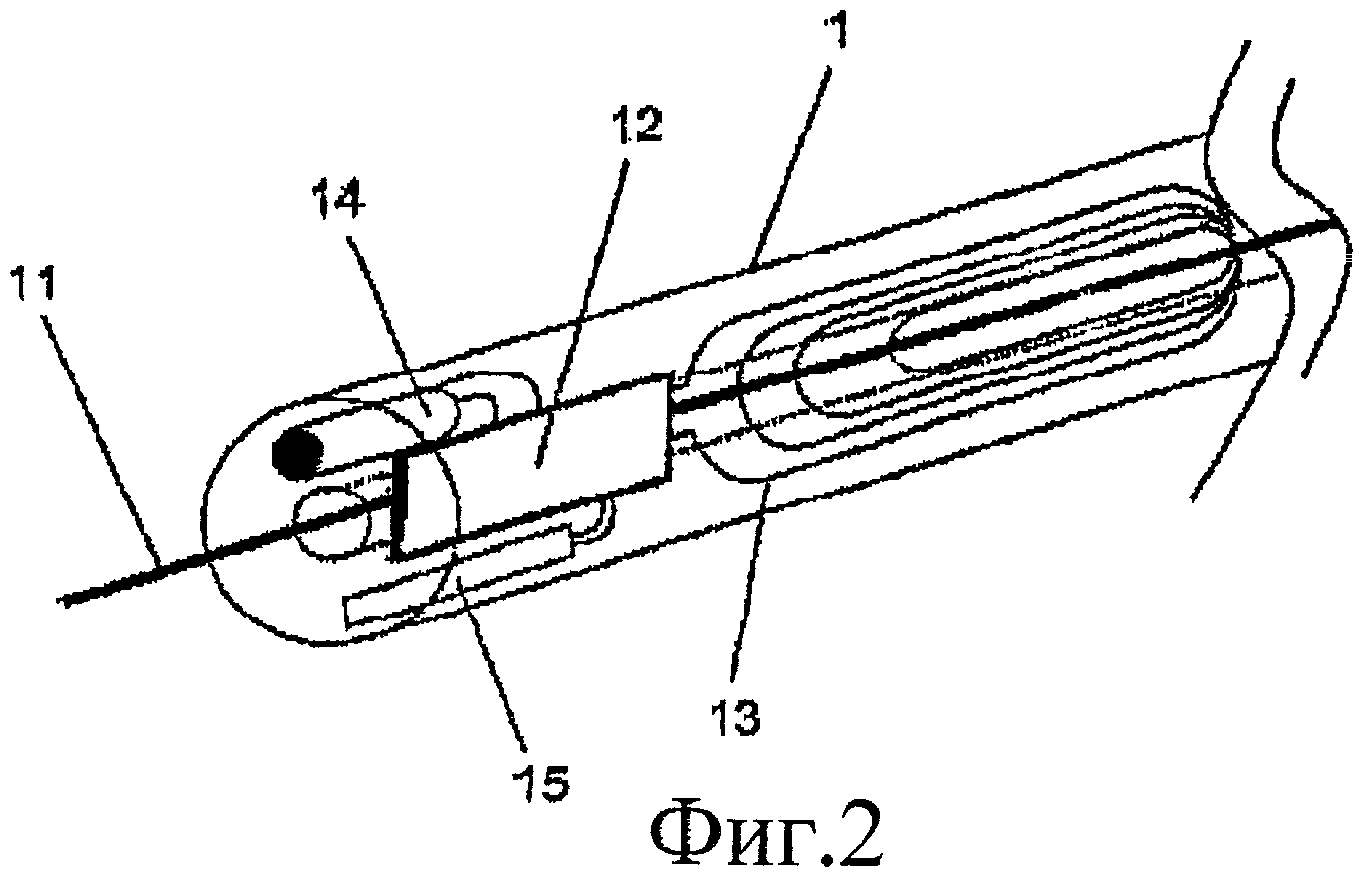
фиг.2 - оборудованный согласно изобретению медицинский инструмент.
Показанная на фиг.1 система служит для определения пространственного положения и ориентации медицинского инструмента 1. На медицинском инструменте 1 расположены локализационные элементы 2 и 2'. Система содержит передающий блок 3, который излучает электромагнитное излучение 4. Излучение 4 принимается локализационными элементами 2 и 2'. Локализационные элементы 2 и 2' имеют каждый приемопередатчик, который возбуждается принимаемым излучением 4, так что приемопередатчик в свою очередь излучает локализационный сигнал в виде (высокочастотного) электромагнитного излучения 5, соответственно, 5'. Излучаемые локализационными элементами 2 и 2' локализационные сигналы 5 и 5' принимаются тремя находящимися в заданных положениях в пространстве приемными блоками 6, 7 и 8. Приемные блоки 6, 7 и 8 соединены с блоком 9 оценки, который на основании фазового соотношения электромагнитного излучения 5, соответственно, 5' локализационных сигналов в соответствующем месте приемных блоков 6, 7 и 8 вычисляет положение и/или ориентацию медицинского инструмента 1, т.е. координаты х, у и z локализационных элементов 2 и 2'. Для калибровки в начале координат предусмотрена точка 10 калибровки. Для калибровки инструмент 1 располагают и ориентируют так, что его вершина находится в точке 10 калибровки, при этом инструмент 1 имеет заданное положение в пространстве. Определяемое с помощью приемных блоков 6, 7 и 8 во время калибровки фазовое соотношение локализационного сигнала 5, соответственно, 5' запоминается с помощью блока 9 оценки. При дальнейшем определении положения с помощью блока 9 оценки сравниваются принимаемые приемными блоками 6, 7 и 8 сигналы с хранящимися данными калибровки, так что можно определять положения локаторных элементов 2 и 2' относительно начала координат.
Кроме того, на фиг.1 показан относящийся к системе дополнительный локализационный элемент 2". Локализационный элемент 2'' расположен не на медицинском инструменте 1. Его можно съемно располагать с помощью клеевого соединения на поверхности кожи пациента. Приемопередатчик дополнительного локализационного элемента 2'' интегрирован в самосклеивающейся полосе ткани или пленки как в обычном пластыре. С помощью излучаемого передающим блоком 3 излучения 4 возбуждается также приемопередатчик дополнительного локализационного элемента 2'', так что он излучает локализационный сигнал 5''. На основании сигнала 5'', который также принимается приемными блоками 6, 7 и 8, блок 9 оценки определяет положение дополнительного локализационного элемента 2". Это позволяет учитывать положение пациента, а также движения пациента при выполнении вмешательства с помощью медицинского инструмента 1.
В последующей таблице показаны значения демпфирования передачи сигналов между передающим блоком 3, локализационными элементами 2, 2', 2'' и приемными блоками 6, 7 и 8 в зависимости от расстояния d между передатчиком и приемником для различных типовых частот передачи RFID с соответствующими длинами волн. При этом на стороне передатчика предполагается усиление антенны 1,64 (диполь) и на стороне приема - усиление антенны 1,0. Дополнительно к этому, в таблице указаны дальности действия для различных частот.
Из таблицы следует, что предпочтительно использование частотного диапазона 433 МГц с рабочей зоной около 70 см × 70 см × 70 см в пространстве, при этом точка 10 калибровки должна находиться на расстоянии максимально 2 м от передатчика, соответственно, приемника. Как указывалось выше, определение положения осуществляется на основании фазовых соотношений локализационных сигналов 5, 5', 5''. На частоте 433 МГц фазовое различие в 1° соответствует расстоянию 1,92 мм. В соответствии с этим, при желательном пространственном разрешении 1,92 мм разрешающая способность при определении фазового соотношения должна составлять, по меньшей мере, 1°. Если же используется частота 5,8 ГГц, то при разрешающей способности определения фазы 1° достигается пространственное разрешение 0,14 мм. Для достижения максимально большого разрешения приемопередатчики локализационных элементов 2, 2', 2'' целесообразно выполнены так, что они могут создавать локализационные сигналы 5, 5', 5'' на двух или более различных частотах. За счет этого можно осуществлять определение положения на основе фазового соотношения с достаточно высокой точностью. За счет применения более низких частот можно сначала грубо, но однозначно определять положение. При этом низкие частоты обеспечивают относительно большую пространственную рабочую зону, внутри которой можно определять положение. За счет перехода на более высокие частоты можно затем более точно определять положение. За счет применения нескольких частот возможно однозначное определение положения на основе фазового соотношения с одновременно более высокой точностью.
На фиг.2 показан снабженный согласно изобретению интраваскулярный катетер 1. Катетер 1 направляется с помощью направляющей проволоки 11 внутри кровяного сосуда. Катетер 1 снабжен локализационным элементом. Локализационный элемент содержит согласно изобретению приемопередатчик со схемой 12 и антенной 13. Антенна 13 намотана из тонкого провода в продольном направлении катетера 1 и соединена со схемой 12. Схема 12 является интегральной полупроводниковой схемой. С помощью антенны 13 принимается излучаемое передающим блоком 3 электромагнитное излучение. Оно индуцирует в антенне 13 индукционный ток. Электроснабжение схемы 12 осуществляется с помощью этого индукционного тока. Таким образом, в показанном на фиг.2 варианте выполнения применяется пассивный приемопередатчик. Для длительного снабжения энергией схемы 12 она соединена с конденсатором 14, который заряжается создаваемым в антенне 13 индукционным током.
Таким образом, конденсатор 14 обеспечивает работу приемопередатчика, даже если создаваемый в антенне 13 индукционный ток является недостаточным для непрерывного электроснабжения. Схема 12 приводится в действие с помощью принимаемого через антенну электромагнитного излучения и тем самым возбуждается для излучения локализационного сигнала в виде электромагнитного излучения через антенну 13. Это происходит за счет того, что схема 12 вызывает модуляцию нагрузкой принимаемого с помощью антенны 13 электромагнитного поля. Кроме того, схема 12 соединена с интегрированным в катетер 1 сенсорным элементом 15, например сенсором температуры. Схема 12 приемопередатчика передает сенсорный сигнал сенсорного элемента 15 в виде цифрового сигнала через антенну 13. Это обеспечивает возможность беспроводного определения температуры в соответствующем месте расположения вершины катетера 1.
Реферат
Группа изобретений относится к медицине и медицинской технике, а именно к системам и способам для определения пространственного положения медицинского инструмента. Система содержит излучающий электромагнитное излучение передающий блок, по меньшей мере, один расположенный на медицинском инструменте локализационный элемент, который принимает излучаемое от передающего блока электромагнитное излучение и генерирует локализационный сигнал. Система также содержит блок оценки, определяющий положение медицинского инструмента посредством оценки локализационного сигнала. Локализационный элемент имеет приемопередатчик, который содержит антенну и схему, соединенную с антенной для приема и передачи электромагнитного излучения. Схема возбуждается с помощью принятого через антенну электромагнитного излучения от передающего блока таким образом, что она излучает через антенну локализационный сигнал как электромагнитное излучение. С блоком оценки соединен, по меньшей мере, один приемный блок. Блок оценки выполнен с возможностью определения положения медицинского инструмента на основании фазового соотношения электромагнитного излучения локализационного сигнала в соответствующем месте приемного блока. Посредством указанной выше системы выполняют этапы способа определения пространственного положения медицинского инструмента. Также в качестве альтернативного варианта выполнения системы в медицинский инструмент интегрируют метку RFID. При этом положение инструмента определяют на основании фазового соотношения электромагнитного излучения локализационного сигнала в месте расположения, по меньшей мере,
Формула
Документы, цитированные в отчёте о поиске
Эндовагинальное ультразвуковое управление гинекологическими процедурами в реальном масштабе времени
Комментарии