Устройство для контроля относительного положения сихронно перемещающихся элементов управления - SU515470A3
Код документа: SU515470A3
Чертежи
Описание
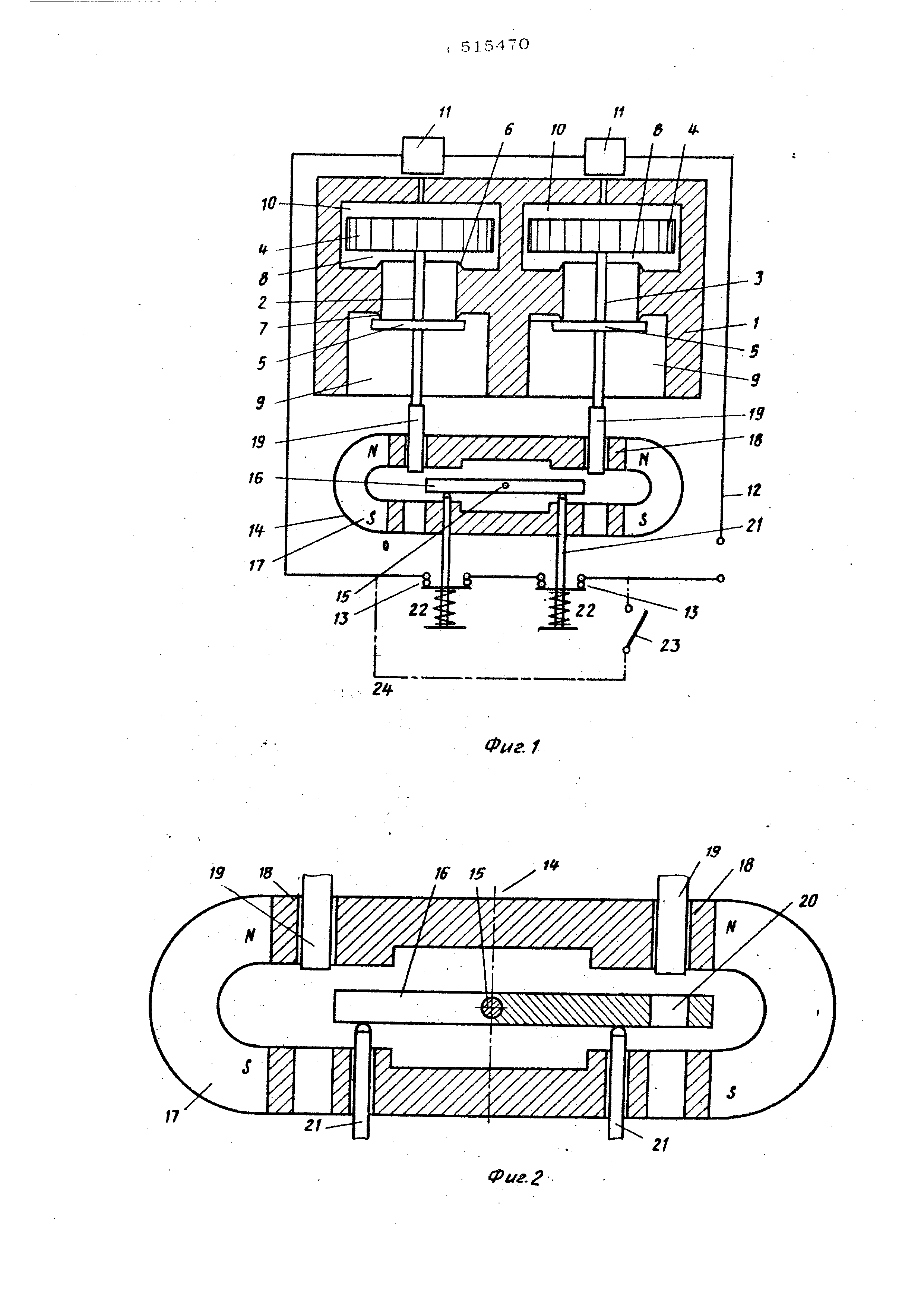
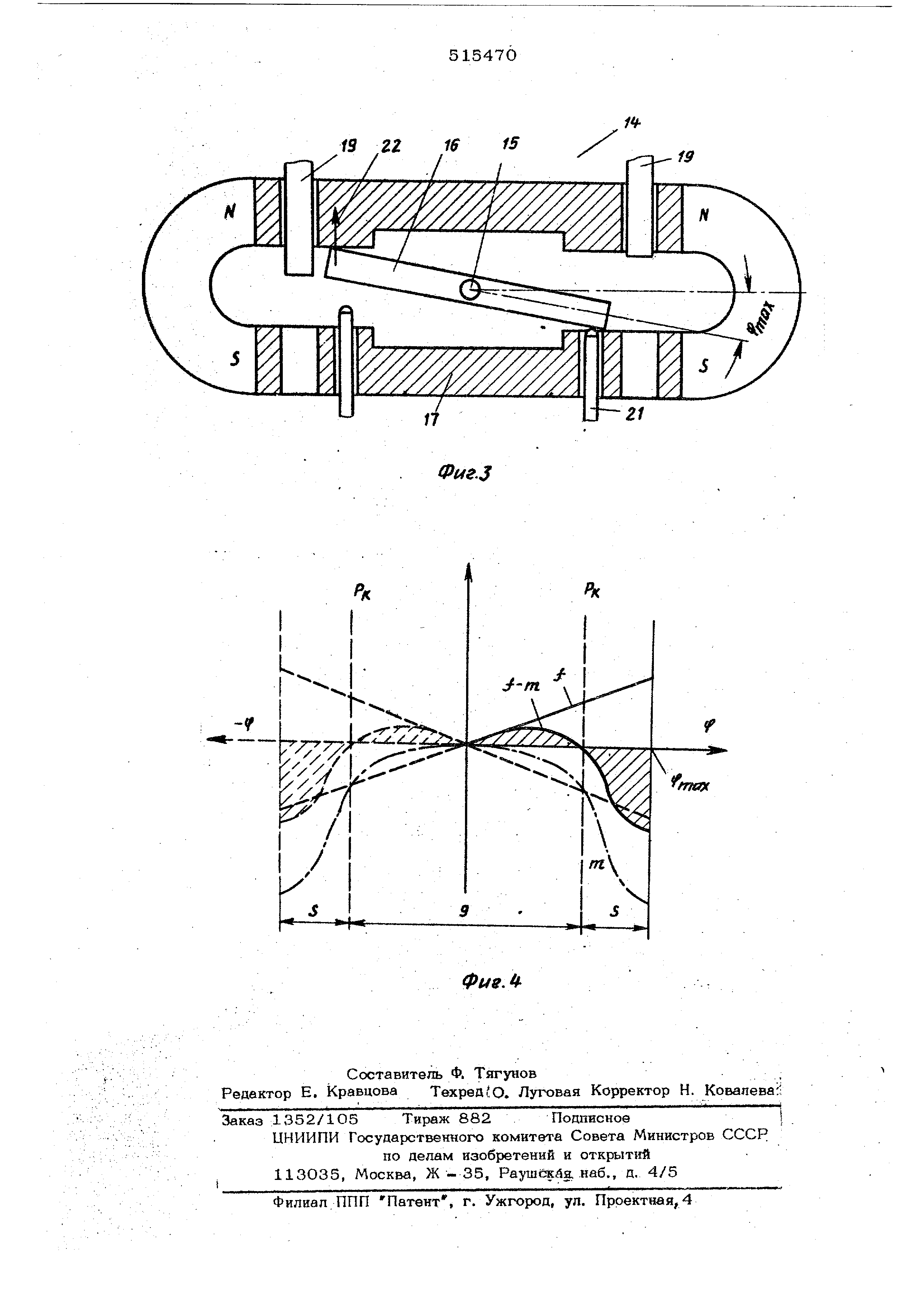
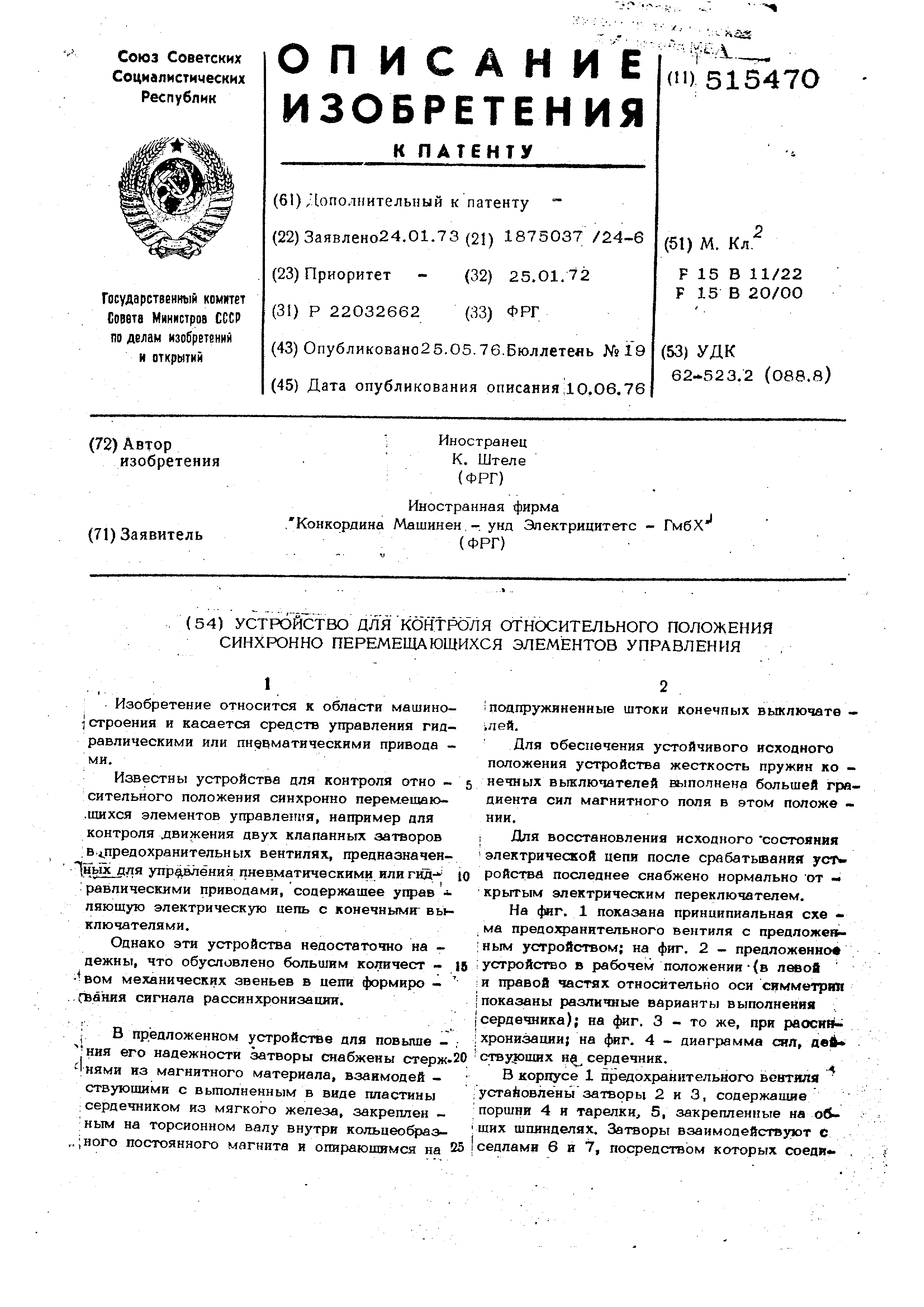
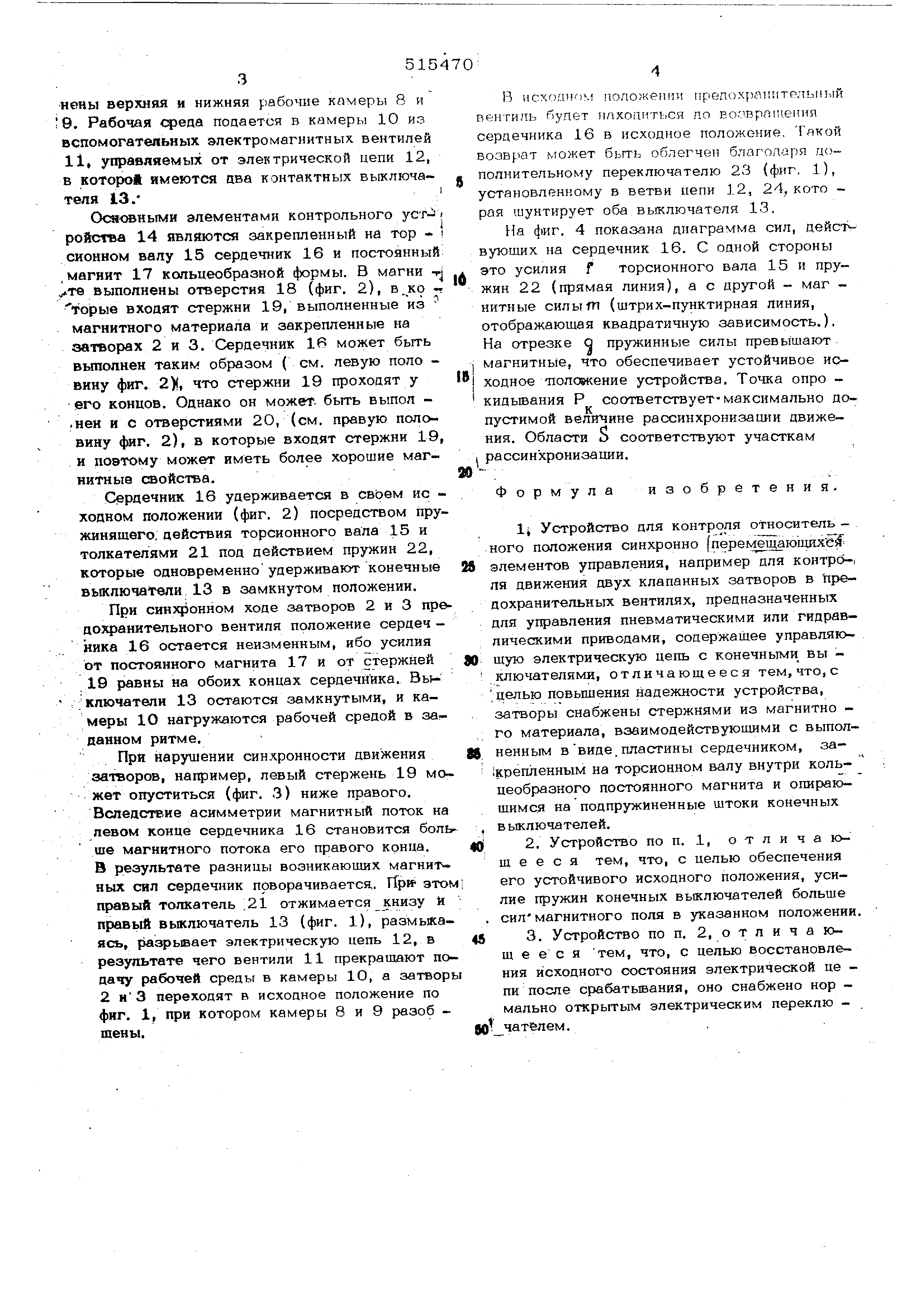
(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ СИНХРОННО ПЕРЕМЕЩАЮЩИХСЯ ЭЛЕМЕНТОВ УПРАВЛЕНИЯ нены верхняя и нижняя рабочие камеры 8 и 9. Рабочая среда подается в камеры 10 из вспомогательных электромагнитных вентилей 11, управляемых от электрической цепи 12, в которой имеются два контактных выключателя 13. Основными элементами контрольного устройства 14 явл$оотся закрепленный на тор сионном валу 15 сердечник 16 и постоянный .магнит 17 кольцеобразной формы. В магни -и ,тв выполнены отверстия 18 (фиг. 2), в.ко торые входят стержни 19, выполненные из магнитного материала и закрепленные на затворах 2 и 3. (Сердечник 1в может быть вьгаопнен таким образом (см. левую поло вину фиг. 2)1, что стержни 19 проходят у его концов. Однако он может- быть выпол .нен и с отверстиями 20, (см. правую половину фиг. 2), в которые входят стержни 19, и поэтому может иметь более хорошие магнитные свойства. Сердечник 16 удерживается в своем ис ходком положении (фиг. 2) посредством пружинящего , действия торсионного вала 15 и толкателями 21 под действием пружин 22, которые одновременно удерживают конечные выключатвли 13 в замкнутом положении. При синхронном ходе затворов 2 и 3 пре дохранительного вентиля положение сердеч ника 16 остается неизменным, ибо усилия от постоянного магнита 17 и от стержней 19 равны на обоих концах сердечника. Вы , ключатели 13 остаются замкнутыми, и камеры 10 нагружаются рабочей средой в за данном ритме. При нарушении синхронности движения затворов, например, левый стержень 19 может опуститься (фиг. 3) ниже правого. ВследстР.ие асимметрии магнитный поток на левом конце сердечника 16 становится боль ше магнитного потока его правого конца. В результате разницы возникающих магнитных сил сердечник поворачивается. ГГри это правый толкатель 21 отжимается книзу И правый выключатель 13 (фиг. 1), размьлаясь , разрывает эпектрическую цепь 12, в результате чего вентили 11 прекращают по дачу рабочей среды в камеры 10, а затвор 2 н 3 переходят в исходное положение по фиг. 1, при котором камеры 8 и 9 рааоб шены. В исхоциом пологкении ripenoxpainiTenbiUiift вентиль будет ппхоаит1:,ся по Еооврпш.епия серцечника 16 в исходное положение. Такой возврат может быть облегчен благодаря .цополнительному переключателю 23 (фиг. 1), установленному в ветви аепи 2, 24 кото рая шунтирует оба выключателя 13. На фиг. 4 показана диаграмма сил, дейст вуюших на сердечник 16. С одной стороны это усилия f торсионного вала 15 и пружин 22 (прямая линия), а с другой - маг нитные силытп (штрих-пунктирная линия, отображающая квадратичную зависимость.). На отрезке Q пружинные силы превышают магнитные, что обеспечивает устойчивое исходное ттолоокение устройства. Точка опро кидьюания Р соответствует-максимально допустимой величине рассинхронизации движения . Области S соответствуют участкам рассинхронизации. изобретения. Формула li Устройство для контроля относитель - ного положения синхронно (перемещающихе элементов управления, например для контрб-i ля движения двух клапанных затворов в tipeдохранительных вентилях, предназначенных для управления пневматическими или гидравлическими приводами, содержащее управляющую электрическую цепь с конечными вы ключателями , отличающееся тем, что, с целью повьпиения надежности устройства, затворы снабжены стержнями из магнитно го материала, взаимодействующими с выполненным ввиде.пластины сердечником, за- {крепленным на торсионном валу внутри коль- пеобразного постоянного магнита и опирающимся на подпружиненные штоки конечных в ыключателей. 2. Устройство по п. 1, отличающееся тем, что, с целью обеспечения его устойчивого исходного положения, усилие пружин конечных выключателей больше сил магнитного поля в указанном положении. 3. Устройство по п. 2, о т л и ч а ющ е е с я тем, что, с целью восстановления исходного состояния электрической це пи после срабатывания, оно снабжено нор - мально открытым электрическим переклю чат&лем .
Ф14г.1
Реферат
Формула
Комментарии