Миниатюрный мак-киббеновский исполнительно-приводной механизм - RU2669437C2
Код документа: RU2669437C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящая заявка в общем относится к исполнительно-приводным механизмам, подходящим для осуществления трансформаций. Более конкретно, настоящая заявка относится к миниатюрному Мак-Киббеновскому исполнительно-приводному механизму, который подходит для трансформирующих деформаций композитных материалов.
УРОВЕНЬ ТЕХНИКИ
Мак-Киббеновские исполнительно-приводные механизмы
представляют собой гидравлические исполнительно-приводные механизмы, которые содержат накачанный трубчатый эластичный баллон, который ограничен наружным расширяющимся рукавом, таким как оплетка. Геометрия оплетки определяет, как кинематика радиального раздувания трубки соотносится с сокращением или расширением оплетки. Мак-Киббеновские исполнительно-приводные механизмы могут быть предпочтительными для применения в авиакосмической промышленности и других областях, поскольку их размер может быть достаточно небольшим, чтобы обеспечить встраивание и интеграцию в композиты, особенно для трансформирующих деформаций композитов. Однако, известные Мак-Киббеновские исполнительно-приводные механизмы могут быть слишком большими для применения в авиакосмической промышленности и других областях.
Таким образом, имеется потребность в миниатюрном Мак-Киббеновском исполнительно-приводном механизме, который в достаточной степени соответствует ограничениям размера и длины, чтобы обеспечить встраивание и интегрирование исполнительно-приводного механизма в композиционные материалы для трансформирующих деформаций указанных композиционных материалов в авиакосмической промышленности и других областях.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение в общем относится к миниатюрному Мак-Киббеновскому гидравлическому исполнительно-приводному механизму, который имеет достаточный размер и длину для встраивания и интегрирования в композиционные материалы для трансформирующих деформаций указанных композиционных материалов в авиакосмической промышленности и других областях. Показанный на чертежах вариант реализации гидравлического исполнительно-приводного механизма содержит трубчатый эластичный баллон, имеющий первый и второй концы, расширяющийся и сжимающийся рукав, размещенный на трубчатом эластичном баллоне, входной штуцер для текучей среды, расположенный с возможностью сообщения с трубчатым эластичным баллоном, и по меньшей мере одно механическое соединение, расположенное вдоль трубчатого эластичного баллона. Гидравлический исполнительно-приводной механизм может быть гибким и иметь общий диаметр меньше, чем примерно 5 мм.
Согласно некоторым вариантам реализации гидравлический исполнительно-приводной механизм может содержать: трубчатый эластичный баллон, имеющий первый и второй концы; расширяющийся и сжимающийся плетеный рукав, содержащий множество оплеточных полос, размещенных на трубчатом эластичном баллоне; входной штуцер для текучей среды, расположенный в первом конце трубчатого эластичного баллона; деталь, выбранную из второго входного штуцера для текучей среды и заглушки и расположенную на втором конце трубчатого эластичного баллона; и по меньшей мере одно механическое соединение, расположенное вдоль трубчатого эластичного баллона. Гидравлический исполнительно-приводной механизм может быть гибким и иметь общий диаметр примерно меньше, чем примерно 5 мм, или в диапазоне между примерно 0,5 мм и примерно 5 мм. Термин "примерно" в настоящем описании означает значение, которое может составлять +/-10% данного значения.
Настоящее изобретение также в общем относится к способу изготовления гидравлического исполнительно-приводного механизма. Показанный на чертежах вариант реализации способа включает этапы, согласно которым используют трубчатый эластичный баллон, имеющий первый и второй концы, используют расширяющийся и сжимающийся рукав, надевают рукав поверх эластичного баллона, используют по меньшей мере один входной штуцер для текучей среды, сообщающийся по текучей среде с трубчатым эластичным баллоном, и используют по меньшей мере одно механическое соединение вдоль эластичного баллона. Гидравлический исполнительно-приводной механизм может быть гибким и иметь общий диаметр меньше, чем примерно 5 мм.
Согласно некоторым вариантам реализации гидравлический исполнительно-приводной механизм может содержать: эластомерный трубчатый эластичный баллон, имеющий первый и второй концы и наружный диаметр примерно 0,020 дюйма (0,51 мм); расширяющийся и сжимающийся биаксиально сплетенный рукав, содержащий множество оплеточных полос, размещенный на трубчатом эластичном баллоне, имеющий номинальный диаметр примерно 0,050 дюйма (1,27 мм) и выдерживающий рабочее давление по меньшей мере примерно 100 фунтов на кв. дюйм (690 кПа); входной штуцер для текучей среды, расположенный в первом конце трубчатого эластичного баллона; заглушку, расположенную на втором конце трубчатого эластичного баллона; первое механическое соединение, расположенное во входном штуцере для текучей среды; фиксирующую конструкцию, прикрепленную к первому механическому соединению; второе механическое соединение, расположенное в заглушке; и нагружаемую конструкцию, прикрепленную к второму механическому соединению. Гидравлический исполнительно-приводной механизм может быть гибким и иметь общий диаметр меньше, чем примерно 5 мм.
Согласно некоторым вариантам реализации способ изготовления гибкого гидравлического исполнительно-приводного механизма может включать этапы, согласно которым: используют эластомерный трубчатый эластичный баллон, имеющего первый и второй концы, а также имеющий наружный диаметр примерно 0,020 дюйма (или примерно 0,5 мм) и выдерживающий рабочее давление примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа), используют расширяющийся и сжимающийся биаксиально сплетенный рукав, содержащий множество оплеточных полос, размещенный на трубчатом эластичном баллоне, имеющий номинальный диаметр примерно 0,050 дюйма (1,27 мм) и выдерживающий рабочее давление по меньшей мере примерно 100 фунтов на кв. дюйм (690 кПа), надевают рукав поверх эластичного баллона, используют первый входной штуцер для текучей среды, расположенный в первом конце трубчатого эластичного баллона, и деталь, выбранную из заглушки и второго входного штуцера для текучей среды, которая расположена на втором конце трубчатого эластичного баллона, используют первый и второй зажимы, обжимают рукав и эластичный баллон на первом входном штуцере для текучей среды с использованием первого зажима и обжимают рукав и эластичный баллон на детали, выбранной из заглушки и второго входного штуцера для текучей среды, с использованием второго зажима, используют первое механическое соединение, расположенное на входном штуцере для текучей среды, используют второе механическое соединение, расположенное в заглушке, и используют множество механических соединений, расположенных между первым механическим соединением и вторым механическим соединением. Гидравлический исполнительно-приводной механизм может иметь общий диаметр меньше, чем примерно 5 мм.
Настоящее изобретение дополнительно в общем относится к способу управления гибким миниатюрным Мак-Киббеновским исполнительно-приводным механизмом. Показанный на чертежах вариант реализации способа включает этапы, согласно которым: используют исполнительно-приводной механизм, имеющий по меньшей мере одну точку механического крепления и общий диаметр меньше, чем примерно 5 мм, используют систему управления исполнительно-приводным механизмом, управляют потоком рабочей текучей среды, протекающей из системы управления исполнительно-приводным механизмом через входной штуцер для текучей среды в эластичный баллон, перемещают точку механического крепления путем расширения эластичного баллона и рукава и управляют потоком рабочей текучей среды, протекающей из эластичного баллона через входной штуцер для текучей среды назад в систему управления исполнительно-приводным механизмом.
Настоящее изобретение дополнительно в общем относится к способу управления длиной и формой гибкого гидравлического исполнительно-приводного механизма. Показанный на чертежах вариант реализации способа включает этапы, согласно которым: используют гибкий гидравлический исполнительно-приводной механизм, имеющий общий диаметр меньше, чем примерно 5 мм, и содержащий эластичный баллон, имеющий первый и второй концы и выдерживающий рабочее давление больше, чем примерно 100 фунтов на кв. дюйм (690 кПа), расширяющийся и сжимающийся рукав, размещенный поверх указанного эластичного баллона, и по меньшей мере одну точку механического крепления между первым и вторым концами эластичного баллона, используют систему управления исполнительно-приводным механизмом и управляют длиной и формой указанного исполнительно-приводного механизма путем регулирования потока рабочей текучей среды, протекающей из указанной системы управления исполнительно-приводным механизмом по меньшей мере через один из указанного первого штуцера для текучей среды и указанного второго входного штуцера для текучей среды в указанный эластичный баллон.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Новые особенности, обеспечивающие характеристику показанных на чертежах вариантов реализации, представлены в пунктах приложенной формулы. Однако, показанные на чертежах варианты реализации, а также предпочтительный способ использования, дополнительные задачи настоящего изобретения и его особенности будут лучше всего поняты после ознакомления с приведенным ниже подробным описанием иллюстративного варианта реализации настоящего изобретения, прочтенного вместе с сопроводительными чертежами, на которых:
фиг. 1 показывает вид сбоку Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации;
фиг. 2 показывает поэлементное изображение в разрезе Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации;
фиг. 3 показывает в разрезе концевую часть миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации;
фиг. 4 показывает вид сбоку миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации, более подробно показывающий фазы расширения и сжатия исполнительно-приводного механизма;
фиг. 5 показывает структурную схему, иллюстрирующую систему управления исполнительно-приводным механизмом, соединенную с миниатюрным Мак-Киббеновским исполнительно-приводным механизмом согласно одному варианту реализации;
фиг. 6 показывает вид сбоку миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации с парой механических соединений (показанных пунктирными линиями), расположенных в соответствующих концах исполнительно-приводного механизма, и парой конструкций (показанных пунктирными линиями), взаимодействующих с соответствующими механическими соединениями;
фиг. 7 показывает вид сбоку миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации с парой механических соединений (показанных пунктирными линиями), расположенных в соответствующих концах исполнительно-приводного механизма, и парой конструкций (показанных пунктирными линиями), взаимодействующих с соответствующими механическими соединениями;
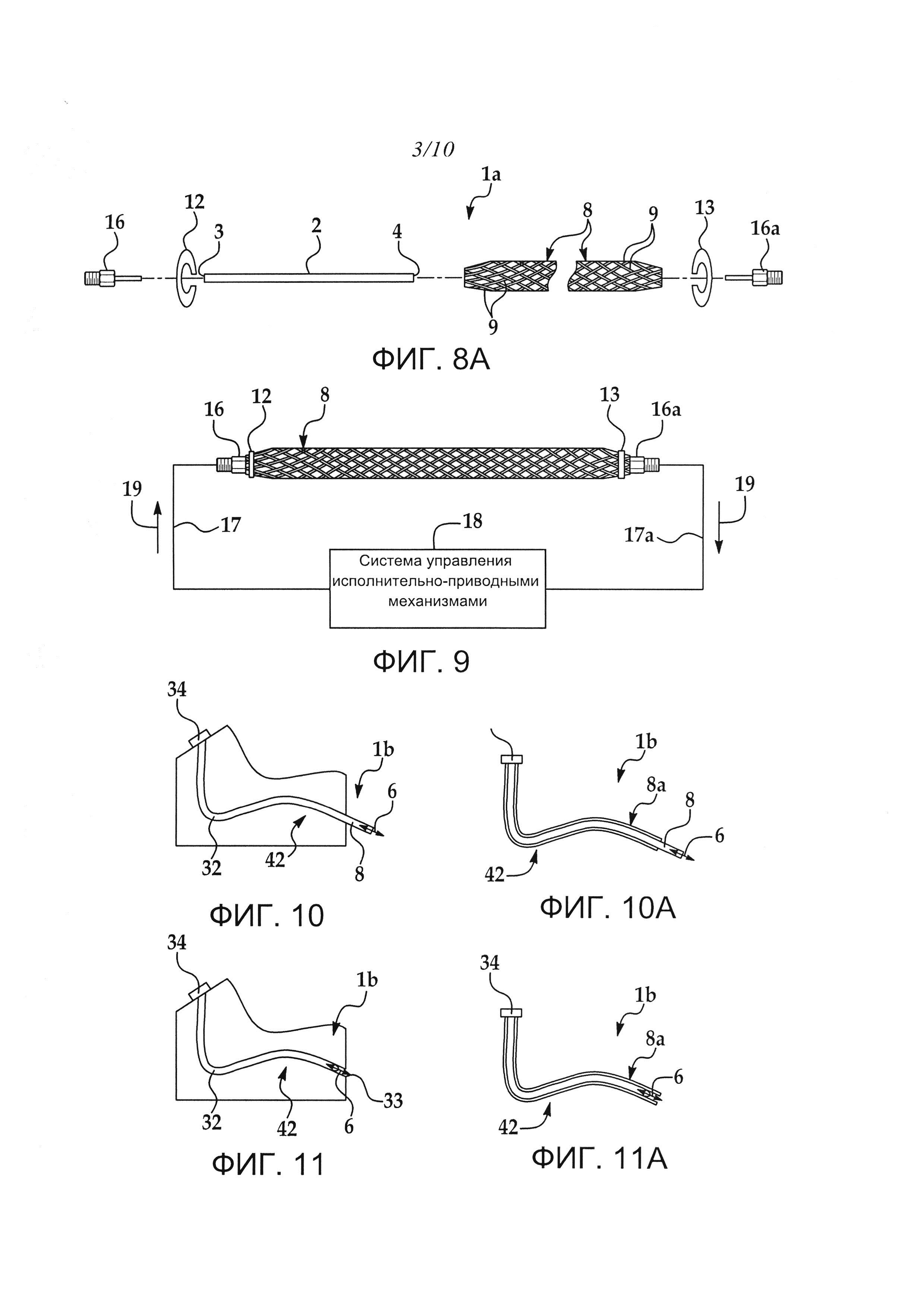
фиг. 8 показывает вид сбоку миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно другому варианту реализации с парой входных штуцеров для текучей среды, расположенных в соответствующих концах исполнительно-приводного механизма;
фиг. 8А показывает поэлементный вид в разрезе миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно варианту реализации, показанному на фиг. 8;
фиг. 9 показывает структурную схему, иллюстрирующую систему управления исполнительно-приводным механизмом, соединенную с миниатюрным Мак-Киббеновским исполнительно-приводным механизмом согласно варианту реализации, показанному на фиг. 8;
фиг. 10 показывает виду сбоку непрямого миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации, вставленного в конструкцию, активационный выход которого не ограничен и не направляется оплеткой исполнительно-приводного механизма; и
фиг. 10А показывает вид сбоку непрямого миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации, показанному на фиг. 10, активационный выход которого выступает из оплетки;
фиг. 11 показывает вид сбоку непрямого миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации, вставленного в конструкцию, активационный выход которого ограничен и направляется оплеткой исполнительно-приводного механизма;
фиг. 11А показывает вид сбоку непрямого миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации, показанному на фиг. 11, активационный выход которого выступает из оплетки;
фиг. 12 показывает блок-схему примера способа изготовления миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно одному варианту реализации;
фиг. 12А показывает блок-схему способа управления миниатюрным Мак-Киббеновским исполнительно-приводным механизмом, который изготовлен способом, показанным на фиг. 12;
фиг. 13 показывает блок-схему способа изготовления миниатюрного Мак-Киббеновского исполнительно-приводного механизма согласно другому варианту реализации;
фиг. 13А показывает блок-схему способа управления миниатюрного Мак-Киббеновским исполнительно-приводным механизмом, который изготовлен способом, показанным на фиг. 13;
фиг. 13B показывает блок-схему способа управления длиной и, формой миниатюрного Мак-Киббеновского исполнительно-приводного механизма;
фиг. 14 показывает блок-схему организации изготовления и эксплуатации воздушного летательного аппарата;
фиг. 15 показывает структурную схему воздушного летательногр аппарата;
фиг. 16 показывает Мак-Киббеновскую структуру в соответствии с показанным на чертежах вариантом реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Нижеследующее подробное описание по своей природе является только примером и не предназначено для ограничения как описанных вариантов реализации, так и применения и использования описанных вариантов реализации. Используемые в настоящей заявке термины "например" или "показанный на чертежах" означает "служащий в качестве примера, варианта или иллюстрации". Любой вариант реализации, описанный в настоящей заявке в качестве "примера" или "показанный на чертежах", не обязательно считается предпочтительным или более предпочтительным по сравнению с другим вариантом реализации. Все варианты реализации, описанные ниже, являются примерами осуществления настоящего изобретения, приведенными для облегчения практической реализации настоящего изобретения специалистами, и не предназначены для ограничения объема защиты, определенного в пунктах приложенной формулы. Кроме того, настоящее описание не связано с какой-либо конкретной явно выраженной или подразумеваемой теорией, представленной в данной области техники, уровне техники, раскрытии или нижеследующем подробном описании.
На фиг. 1-7 показан вариант реализации миниатюрного Мак-Киббеновского исполнительно-приводного механизма, в дальнейшем "исполнительно-приводного механизма", обозначенного позиционным номером 1. Исполнительно-приводной механизм 1 может содержать удлиненный эластичный баллон 2, который может быть выполнен из упругого эластомерного материала. Соответствующие материалы для эластичного баллона 2 включают, например, помимо прочего витон®, уретан, силикон, латекс и/или другой эластомерный полимер. Эластичный баллон 2 может иметь первый конец 3 и второй конец 4. Согласно некоторым вариантам реализации эластичный баллон 2 может иметь наружный диаметр (OD) 2а, составляющий примерно 0,020 дюйма (0,51 мм), и толщину 2b стенки примерно 0,003 дюйма (0,076 мм).
Расширяющийся и сокращающийся рукав 8 может проходить поверх эластичного баллона 2. Согласно некоторым вариантам реализации рукав 8 может быть оплеткой, содержащей оплеточные полосы 9. Оплеточные полосы 9 рукава 8 могут быть любым материалом, который обладает необходимыми характеристиками и соответствует окружающим условиям, в которых может быть применен исполнительно-приводной механизм 1. Соответствующие материалы для оплеточных полос 9 рукава 8 включают, например, помимо прочего, нейлон, полиэстер, стекловолокно, углеродное волокно, волокно кевлара и/или другое структурное волокно или волокнистые материалы. Согласно некоторым вариантам реализации оплеточные полосы 9 могут быть выполнены из прядей волокон и могут иметь относительно открытую биаксиальную конструкцию, так что по-разному направленные пряди (по часовой стрелке и против часовой стрелки) могут создавать эффект "ножниц" относительно друг друга во время расширения и сокращения рукава 8. Согласно некоторым вариантам реализации рукав 8 может иметь номинальный диаметр примерно 0,05 дюйма (1,27 мм) с углом оплетки, составляющим, как правило, 45°. Согласно некоторым вариантам реализации общий диаметр 5 исполнительное приводного механизма 1 может быть меньше, чем примерно 5 мм.
Входной штуцер 16 для текучей среды может быть вставлен в первый конец 3 эластичного баллона 2. Согласно некоторым вариантам реализации заглушка 20 может быть вставлена во второй конец 4 эластичного баллона 2. Как показано на фиг. 3, первый зажим 12 может обжимать рукав 8 на эластичном баллоне 2 и входном штуцере 16 в первом конце 3 эластичного баллона 2. Второй зажим 13 (на фиг. 4) также может обжимать рукав 8 на эластичном баллоне 2 и заглушке 20 на втором конце 4 эластичного баллона 2.
Изготовление исполнительно-приводного механизма 1 может включать надевание рукава 8 поверх эластичного баллона 2, так что рукав 8 сжимается приблизительно на 15-20% по сравнению с нерастянутой длиной эластичного баллона 2. Эпоксидная смола, такая как, например, помимо прочего, быстро отверждающаяся эпоксидная смола (не показана), может быть нанесена на входной штуцер 16 и заглушку 20, после чего входной штуцер 16 может быть вставлен в первый конец 3, а заглушка 20 может быть вставлена во второй конец 4 эластичного баллона 2. Как только эпоксидная смола затвердеет, эластичный баллон 2 с входным штуцером 16 и заглушкой 20 может быть вставлен в рукав 8. Затем рукав 8 может быть закреплен на месте поверх эластичного баллона 2 с использованием первого зажима 12 и второго зажима 13. Первый зажим 12 и второй зажим 13 могут быть расположены таким образом, что первый зажим 12 и второй зажим 13 обжимают области эластичного баллона 2, в которых расположены зубчатые соединители (не показаны) входного штуцера 16 и заглушки 20. После обжима рукава 8 на месте лишние части рукава 8 с наружной стороны входного штуцера 16 и заглушки 20 могут быть отрегулированы и закреплены в положении, которое может обеспечить возможность крепления исполнительно-приводного механизма 1 в конце входного штуцера 16 и осевого нагружения в конце заглушки 20. Соответственно, как показано на фиг. 6, в некоторых случаях первое механическое соединение 24 может крепить входной штуцер 16 к фиксирующей конструкции 25. Второе механическое соединение 26 может соединять заглушку 20 с нагружаемой конструкцией 27.
Как показано на фиг. 7, согласно некоторым из вариантов реализации механические соединения 30 могут быть расположены в выбранных положениях последовательно или параллельно вдоль втулки 8 для облегчения крепления исполнительно-приводного механизма 1 к нагружаемой конструкции или конструкциям 27. Согласно некоторым вариантам реализации механические соединения 30 могут содержать адгезив, который связывает наружный диаметр исполнительно-приводного механизма 1 с конструкцией или конструкциями 27. Такое расположение может деактивировать связанную длину исполнительно-приводного механизма 1. В этом случае адгезивная связь может быть выполнена с возможностью облегчения распределения нагрузки между исполнительно-приводным механизмом 1 и конструкцией или конструкциями 27. Таким образом, вероятность пережатия потока текучей среды конструкцией или конструкциями 27 и ее "врезания" в исполнительно-приводной механизм 1 может быть минимизирован.
Толщина 2b стенки эластичного баллона 2 может быть малой по сравнению с радиусом 2 с эластичного баллона 2. Отношение диаметра 2а к длине 2е эластичного баллона 2 может быть определено быстродействием (количеством текучей среды, проходящей в эластичный баллон 2 из исполнительно-приводного механизма 1 в единицу времени) исполнительно-приводного механизма 1, падением давления вдоль исполнительно-приводного механизма 1 и простотой сборки и создания различных гидравлических и механических соединений. Длина 36 исполнительно-приводного механизма 1 может в три раза превышать диаметр 37 исполнительно-приводного механизма 1 благодаря заделке концов обжимом, который осуществлен первым зажимом 12 и вторым зажимом 13, поскольку они ограничивают кинематику плетеного рукава 8. Согласно некоторым вариантам реализации множественные механические соединения 30 расположены вдоль исполнительно-приводного механизма 1, как описано выше со ссылкой на фиг. 7. Таким образом, может потребоваться, чтобы дополнительная длина исполнительно-приводного механизма достигала исходного смещения исполнительно-приводного механизма 1. В адгезионном механическом креплении длина 38 смещения исполнительно-приводного механизма 1 может уменьшаться на 1-3 диаметра с локальным ограничением кинематики рукава 8. Это ограничение кинематики может предотвращать напряжения активации вдоль этой части 38 длины исполнительно-приводного механизма 1, но может способствовать равномерному распределению конструктивной нагрузки 39 на исполнительно-приводной механизм 1. Согласно другому варианту реализации механические соединения 30 могут быть осуществлены физическим зажатием или обжатием 31 рукава 8. Пряди или волокна (не показаны), используемые при изготовлении оплеточных полос 9 рукава 8, могут быть выбраны таким образом, что они в достаточной степени распределены поверх эластичного баллона 2 и не "врезаются" в эластичный баллон 2, и при этом поддерживали биаксиальную кинематику, необходимую для обеспечения возможности активации.
Как показано на фиг. 4 и 5, система 18 управления исполнительно-приводным механизмом (показана на фиг. 5) может быть расположена с возможностью сообщения 21 с входным штуцером 16 для текучей среды посредством входной трубки 17 для текучей среды. Система 18 может содержать элементы 18а-18g, такие как насосы 18а, пневмогидроаккумуляторы 18b, клапанная арматура 18с, распределительные линии 18d, коллекторы 18е, датчики 18f давления и тензодатчики 18g. Эти элементы 18а-18g используются для распределения рабочей текучей среды 19 (как показано на фиг. 5), которая может быть газом или жидкостью, в эластичный баллон 2 посредством входной трубки 17 и входного штуцера 16 соответственно. Таким образом, при использовании исполнительно-приводного механизма 1 протекающая в эластичный баллон 2 рабочая текучая среда 19 может расширять эластичный баллон 2 и рукав 8 в наружном направлении, как указано стрелками 10 и пунктирными линиями на фиг. 4. Рукав 8 может ограничивать направленное наружу расширение 10 эластичного баллона 2. Это расширяющее действие 10 эластичного баллона 2 может вызывать сокращение исполнительно-приводного механизма 1, как указано стрелками 11, в результате чего исполнительно-приводной механизм 1 прилагает трансформацию или другое давление 10 к нагружаемой конструкции или конструкциям 27 (как показано на фиг. 6 и 7), которые могут быть соединены с исполнительно-приводным механизмом 1. Затем, после сброса гидравлического давления во входной трубке 17, рабочая текучая среда 19 может вытекать из эластичного баллона 2, обеспечивая возможность сжатия эластичного баллона 2 назад в исходную форму, показанную сплошными линиями на фиг. 4. В некоторых случаях рабочая текучая среда 19 может иметь рабочее давление 10 примерно 100-1000 фунтов на кв. дюйм (690-6900 кПа). В некоторых случаях рабочая текучая среда 19 может иметь рабочее давление примерно 300-600 фунтов на кв. дюйм (2070-4140 кПа). Согласно некоторым вариантам реализации обратная связь от датчиков 18f, 18g в системе 18 управления исполнительно-приводным механизмом может быть использована для реализации необходимых функциональных возможностей исполнительно-приводного механизма (таких как, например, противодействующая операция между двумя исполнительно-приводными механизмами 1) и определения сигналов системы управления (не показаны), которые используются для управления регулирующим клапаном и гидравлическим оборудованием 18а-18g насоса для обеспечения соответствующего регулируемого по времени давления на выходе 10 рабочей текучей среды 19.
В некоторых случаях нагружаемая конструкция или конструкции 27 исполнительно-приводного механизма 1 могут включать трансформирующиеся консоли крыльев (не показаны) для применения в авиакосмической промышленности. Исполнительно-приводной механизм 1 подходит для использования в различных областях применения, где существуют ограничения по размеру, длине и массе, включая помимо прочего, уплотнения, робототехнику, органы управления беспилотными летательными аппаратами и другие области применения, в которые требуется локализованная, гибкая или хорошо растяжимая, но ограниченная по длине активация. Указанные области применения могут включать воздушный летательный аппарат с неподвижным крылом и с изменяемой стреловидностью крыла. Кроме того, исполнительно-приводной механизм 1 может быть применен в крыльях, стабилизаторах, переднем горизонтальном оперении, вертикальных концевых аэродинамических поверхностях, закрылках, люках, выдвижных компонентах или инструментах, отсеках изменяемого размера и поверхностях управления.
Специалистам понятно, что исполнительно-приводной механизм 1 может обеспечить локализованное управление деформацией с высокой жесткостью внутри обшивки воздушного летательного аппарата, в частности обшивки крыла. Исполнительно-приводной механизм 1 может обеспечить надлежащее активирующее растяжение и сжатие, необходимые для трансформирующих деформаций в других областях авиастроения и других областях применения помимо авиакосмической промышленности. Увеличенное напряжение активации, которое может быть необходимо для решения таких задач, может быть обеспечено работой гидравлической системы под высоким давлением (100-1000 фунтов на кв. дюйм (690-6900 кПа)) и с высокой целостностью обжатия концевых соединений. Исполнительно-приводной механизм 1 может быть масштабирован до небольшого размера и, таким образом, потенциально может быть встроен и интегрирован в составные объекты. Исполнительно-приводным механизмом 1 можно управлять посредством дистанционной клапанной арматуры. Обычно закрытая клапанная арматура может обеспечивать возможность удерживания и поддерживания посредством исполнительно-приводного механизма 1 положения или деформации без дополнительной энергии или подводимой мощности. Быстродействие исполнительно-приводного механизма 1 может быть ограничено скоростью текучей среды, проходящей сквозь клапан, и упругостью эластичного баллона 2. Использований материалов с низкой температурой стеклования для изготовления эластичного баллона 2 может обеспечить возможность выдерживания исполнительно-приводным механизмом 1 предельных температур, которые встречаются на высоте полета. Исполнительно-приводной механизм 1 может обеспечить возможность расположения множества наружных точек механического крепления вдоль своей длины. Такой подход обеспечивает эффект распределения смещения исполнительно-приводного механизма и силы вдоль его длины, что способствует сокращению длины конструкций с большим относительным удлинением, таких как тонкие составные обшивки и многослойные панели.
На фиг. 8, 8А и 9 показан другой вариант реализации миниатюрного Мак-Киббеновского исполнительно-приводного механизма, обозначенный позиционным номером 1а. В исполнительно-приводном механизме 1а первый входной штуцер 16 для текучей среды может быть расположен в первом конце 3, и второй входной штуцер 16а для текучей среды может быть расположен на втором конце 4 эластичного баллона 2. Соответственно, система 18 управления исполнительно-приводным механизмом может быть соединена с первым входным штуцером 16 посредством первой входной трубки 17 и со вторым входным штуцером 16а посредством второй входной трубки 17а. Работа исполнительно-приводного механизма 1а подобна работе описанного выше исполнительно-приводного механизма 1, показанного на фиг. 4 и 5. Во время работы исполнительно-приводного механизма 1а рабочая текучая среда 19 может быть подана из системы 18 управления исполнительно-приводным механизмом в эластичный баллон 2 посредством первой входной трубки 17 и первого входного штуцера 16 соответственно. Рабочая текучая среда 19 может протекать из эластичного баллона 2 назад в систему 18 через второй входной штуцер 16а и вторую входную трубку 17а соответственно.
Механические соединения 24, 26, 30 исполнительно-приводного механизма 1а могут быть такими же, как и описанные выше для исполнительно-приводного механизма 1, показанного на фиг. 6 и 7. Соответственно, как показано на фиг. 8, согласно некоторым из вариантов реализации первое механическое соединение 24 может соединять первый входной штуцер 16 с фиксирующей конструкцией 25. Второе механическое соединение 26 может соединять второй входной штуцер 16а с нагружаемой конструкцией 27. В дополнение к данному или согласно другому варианту реализации одно или несколько механических соединений 30 могут быть расположены в одном или большем количестве выбранных мест вдоль исполнительно-приводного механизма 1а для облегчения крепления исполнительно-приводного механизма 1а к одной или большему количеству нагружаемых конструкций 27.
Как показано на фиг. 10-11А, использование наружной оплетки для исполнительно-приводного механизма 1 может обеспечить возможность встраивания длинных, гибких гидравлических Мак-Киббеновских исполнительно-приводных механизмов/Мак-Киббеновских исполнительно-приводных механизмов на основе текучей среды в непрямые пути для достижения точечной активации с большим смещением. Указанная гибкость 42 исполнительно-приводного механизма 1 может облегчить его приспособление к пространственным и размерным ограничениям в конкретной области применения. Соответственно, непрямой исполнительно-приводной механизм 1b, имеющий гибкость 42, показан вставленным во внутренний канал 33 исполнительно-приводного механизма (как показано на фиг. 11), встроенного в конструкцию 32. Жесткая или полужесткая оболочка 8а (как показано на фиг. 10а и 11а), которая может иметь жесткость >1 ГПа, может быть размещена поверх рукава 8 исполнительно-приводного механизма 1b. Круглое поперечное сечение канала 33 исполнительно-приводного механизма в конструкции 32 может направлять смещение исполнительно-приводного механизма 1b во время его работы в канале 33 исполнительно-приводного механизма в конструкции 32. Согласно некоторым вариантам реализации для осуществления равномерной активации исполнительно-приводного механизма 1b внутри оболочки 8а может быть использована смазка (не показана).
Как показано на фиг. 10 и 10А, согласно некоторым из вариантов реализации активационный выходной конец 6 исполнительно-приводного механизма 1b может не ограничиваться и не управляться оболочкой 8а. Длина оболочки 8а может быть достаточной для направления большей части исполнительно-приводного механизма 1b вдоль криволинейного пути канала 33 исполнительно-приводного механизма к концевому механическому соединению 34, которое может быть размещено на верхнем конце исполнительно-приводного механизма 1b. Как показано на фиг. 11 и 11А, согласно некоторым из вариантов реализации длина оболочки 8а может быть достаточной для ограничения и направления перемещающегося активационного выходного конца 6 исполнительно-приводного механизма 1b.
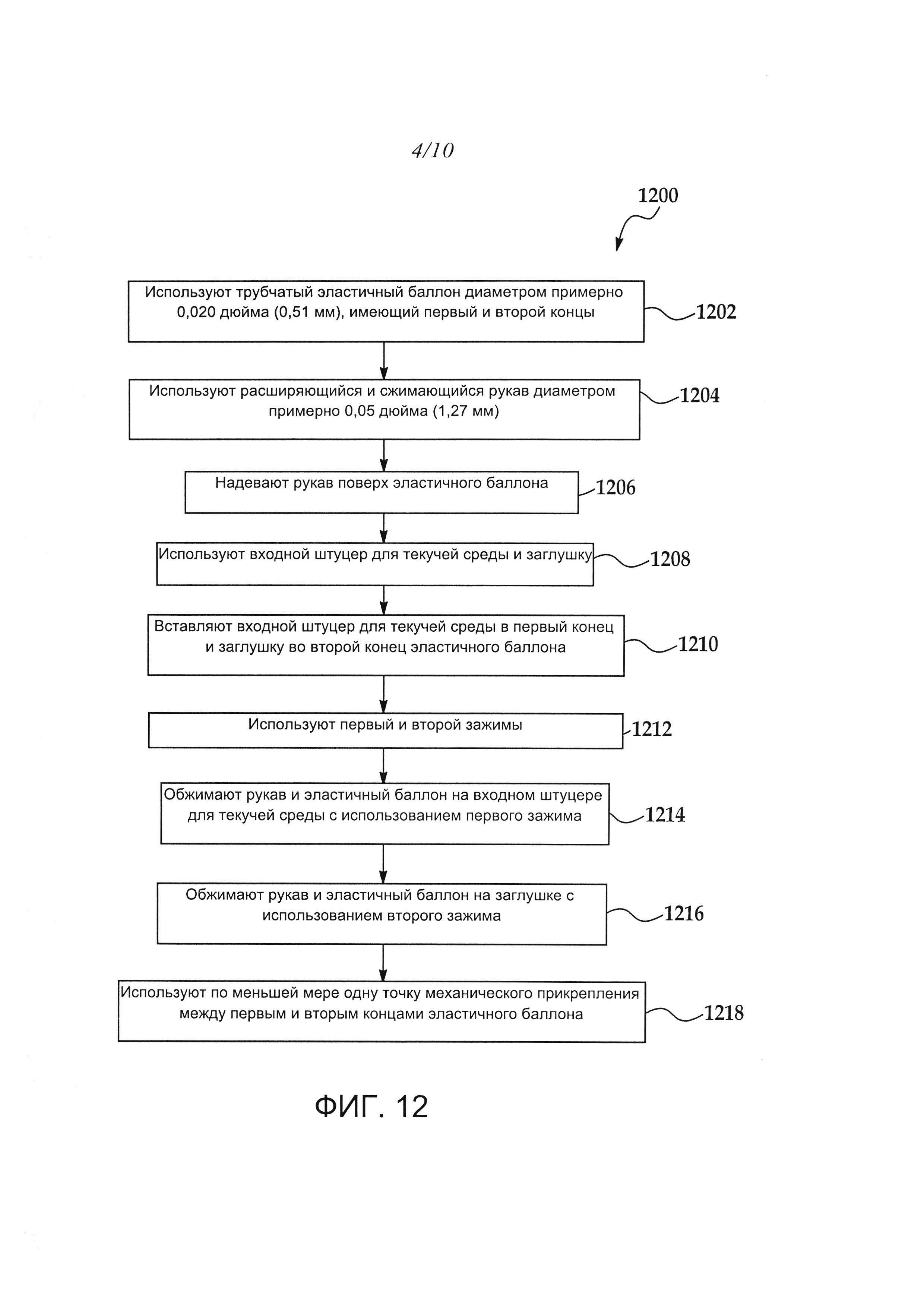
На фиг. 12 показана блок-схема 1200 примера способа изготовления показанного на чертежах варианта реализации миниатюрного Мак-Киббеновского исполнительно-приводного механизма 1. Исполнительно-приводной механизм 1 может иметь общий диаметр 5, который меньше, чем примерно 5 мм. На этапе 1202 используют эластомерный трубчатый эластичный баллон 2, имеющий первый конец 3 и второй конец 4. Согласно некоторым вариантам реализации эластичный баллон 2 может иметь наружный диаметр (OD) 2а примерно 0,020 дюйма (0,51 мм). Эластичный баллон 2 может работать при давлениях текучей среды больше, чем 100 фунтов на кв. дюйм (690 кПа). Согласно некоторым вариантам реализаций эластичный баллон 2 может работать при давлениях текучей среды примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа). На этапе 1204 используют расширяющийся и сжимающийся рукав 8. Согласно некоторым вариантам реализации рукав 8 может быть плетеным рукавом 8. Согласно некоторым вариантам реализации плетеный рукав 8 может быть биаксиальным плетеным рукавом. Согласно некоторым вариантам реализации рукав 8 может иметь номинальный диаметр 37 примерно 0,05 дюйма (примерно 1 мм). На этапе 1206 надевают рукав 8 поверх эластичного баллона 2. На этапе 1208 используют входной штуцер 16 и заглушку 20. На этапе 1210 вставляют входной штуцер 16 в первый конец 3 и заглушку 20 во второй конец 4 эластичного баллона 2. На этапе 1212 используют первый зажим 12 и второй зажим 13. На этапе 1214 обжимают рукав 8 и эластичный баллон 2 на входном штуцере 16 с использованием первого зажима 12. На этапе 1216 обжимают рукав 8 и эластичный баллон 2 на заглушке 20 с использованием второго зажима 13. На этапе 1218 монтируют по меньшей мере одно первое механическое соединение 24 в первом конце 3, втором конце 4 и/или между первым концом 3 и вторым 4 концом эластичного баллона 2. В некоторых областях применения первое механическое соединение 24 может быть расположено во входном штуцере 16, и второе механическое соединение 26 может быть расположено в заглушке 20. В некоторых областях применения множество механических соединений 30 могут быть расположены между первым механическим соединением 24 и вторым механическим соединением 26.
На фиг. 12А показана блок-схема 1200а управления миниатюрным Мак-Киббеновским исполнительно-приводным механизмом, изготовленным способом, показанным на фиг. 12. На этапе 1202а используют исполнительно-приводной механизм 1. Исполнительно-приводной механизм 1 может содержать трубчатый эластичный баллон 2 с первым концом 3 и вторым концом 4, расширяющийся и сжимающийся рукав 8, размещенный поверх эластичного баллона 2, входной штуцер 16, обжатый в первом конце 3 эластичного баллона 2, заглушку 20, обжатую на втором конце 4 эластичного баллона 2, и по меньшей мере одно механическое соединение 30 между первым концом 3 и вторым концом 4 эластичного баллона 2. Эластичный баллон 2 может работать при давлениях текучей среды больше, чем 100 фунтов на кв. дюйм (690 кПа). Согласно некоторым вариантам реализации эластичный баллон 2 может работать при давлениях текучей среды примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа). Эластичный баллон 2 может иметь общий диаметр 5 меньше, чем примерно 5 мм. На этапе 1204а используют систему 18 управления исполнительно-приводным механизмом. На этапе 1206а управляют потоком рабочей текучей среды 19, протекающей из системы 18 управления через входной штуцер 16 в эластичный баллон 2. На этапе 1208а обеспечивают расширение эластичного баллона 2 и рукава 8 для перемещения механического соединения 30. На этапе 1210а управляют потоком рабочей текучей среды 19, протекающей из эластичного баллона 2 через входной штуцер 16 назад в систему 18 управления.
На фиг. 13 показана блок-схема 1300 примера способа изготовления альтернативного показанного на чертежах варианта реализации миниатюрного Мак-Киббеновского исполнительно-приводного механизма 1а. Исполнительно-приводной механизм 1а может иметь общий диаметр 5 меньше, чем примерно 5 мм. На этапе 1302 используют эластомерный трубчатый эластичный баллон 2, имеющий первый конец 3 и второй конец 4. Согласно некоторым вариантам реализации эластичный баллон 2 может иметь наружный диаметр (OD) 2а примерно 0,020 дюйма (0,51 мм). Эластичный баллон может работать при давлениях текучей среды больше, чем 100 фунтов на кв. дюйм (690 кПа). Согласно некоторым вариантам реализации эластичный баллон может работать при давлениях текучей среды примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа). На этапе 1304 используют расширяющийся и сжимающийся рукав 8. Согласно некоторым вариантам реализации рукав 8 может быть плетеным рукавом 8. Согласно некоторым вариантам реализации плетеный рукав 8 может быть биаксиальным плетеным рукавом 8. Согласно некоторым вариантам реализации рукав 8 может иметь номинальный диаметр 37 примерно 0,05 дюйма (1,27 мм). На этапе 1306 размещают рукав 8 поверх эластичного баллона 2. На этапе 1308 используют входной штуцер 16 и второй входной штуцер 16а. На этапе 1310 вставляют входной штуцер 16 и второй входной штуцер 16а в первый конец 3 и второй конец 4 эластичного баллона 2 соответственно. На этапе 1312 используют первый зажим 12 и второй зажим 13. На этапе 1314 обжимают рукав 8 и эластичный баллон 2 на входном штуцере 16 с использованием первого зажима 12. На этапе 1316 обжимают рукав 8 и эластичный баллон 2 на втором входном штуцере 16а с использованием второго зажима 13. На этапе 1318 по меньшей мере одно первое механическое соединение 24 устанавливают в первом конце 3, втором конце 4 и/или между первым концом 3 и вторым концом 4 эластичного баллона 2. В некоторых случаях применения первое механическое соединение 24 может быть расположено во входном штуцере 16, и второе механическое соединение 26 может быть расположено во втором входном штуцере 16а. В некоторых областях применения множественные механические соединения 30 могут быть расположены между первым механическим соединением 24 и вторым механическим соединением 26.
На фиг. 13А показана блок-схема 1300а управления миниатюрным Мак-Киббеновским исполнительно-приводным механизмом 1а, изготовленным способом, показанным на фиг. 13. На этапе 1302а используют исполнительно-приводной механизм 1а. Исполнительно-приводной механизм 1а может иметь трубчатый эластичный баллон 2 с первым концом 3 и вторым концом 4, расширяющийся и сжимающийся рукав 8, размещенный поверх эластичного баллона 2, входной штуцер 16 для текучей среды, обжатый первым зажимом 12 на первом конце 3 эластичного баллона 2, второй входной штуцер 16а для текучей среды, обжатый на втором конце 4 эластичного баллона 2, и по меньшей мере одно механическое соединение 30 между первым концом 3 и вторым концом 4 эластичного баллона 2. Эластичный баллон 2 может работать при давлениях текучей среды больше, чем 100 фунтов на кв. дюйм (690 кПа). Согласно некоторым вариантам реализации эластичный баллон может работать при давлениях текучей среды примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа). Исполнительно-приводной механизм 1а может иметь общий диаметр 5 меньше, чем примерно 5 мм, могут быть использованы увеличенные или уменьшенные диаметры. На этапе 1304а используют систему 18 управления исполнительно-приводным механизмом. На этапе 1306а управляют потоком рабочей текучей среды 19, протекающей из системы 18 управления через входной штуцер 16 и/или второй входной штуцер 16а в эластичный баллон 2. На этапе 1308а обеспечивают расширение эластичного баллона 2 и рукава 8 для перемещения механического соединения 30. На этапе 1310а управляют потоком рабочей текучей среды 19, протекающей из эластичного баллона 2 через входной штуцер или штуцеры 16, 16а назад в систему 18.
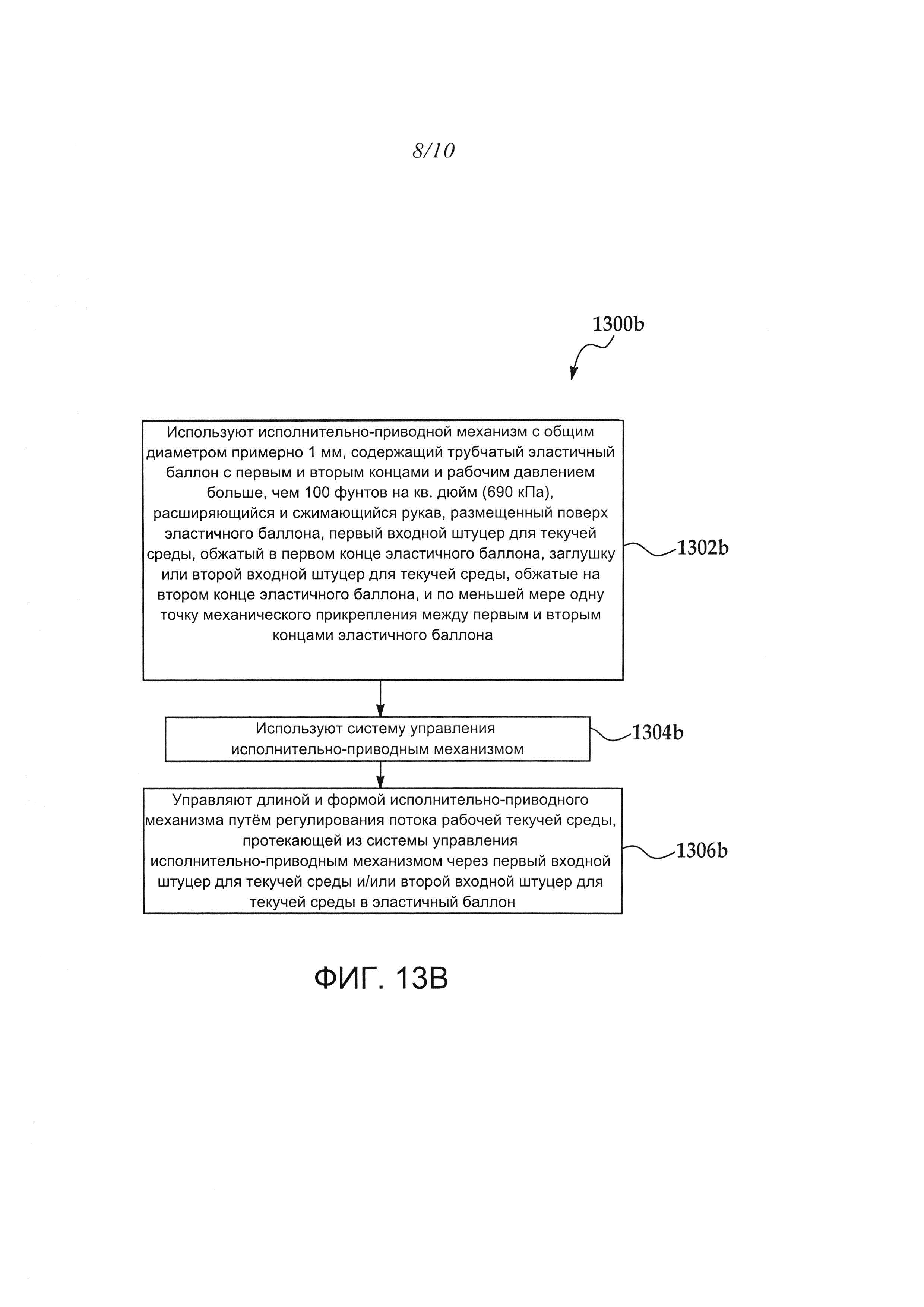
На фиг. 13B показана блок-схема 1300b способа управления длиной 36 (как показано на фиг. 1) и формой 40 (как показано на фиг. 4) миниатюрного Мак-Киббеновского исполнительно-приводного механизма 1, 1а. На этапе 1302b используют миниатюрный Мак-Киббеновский исполнительно-приводной механизм 1, 1а. Исполнительно-приводной механизм 1, 1а может иметь общий диаметр меньше, чем примерно 5 мм; Исполнительно-приводной механизм 1, 1а может содержать эластичный баллон 2, имеющий первый конец 3 и второй конец 4, и может выдерживать рабочее давление больше, чем примерно 100 фунтов на кв. дюйм (690 кПа). Согласно некоторым вариантам реализации эластичный баллон 2 может выдерживать рабочее давление примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа). Исполнительно-приводной механизм 1 может содержать расширяющийся и сжимающийся рукав 8, размещенный поверх эластичного баллона 2, входной штуцер 16 для текучей среды, обжатый первым зажимом 12 в первом конце 3 эластичного баллона 2, заглушку 20 или второй входной штуцер 16b для текучей среды, обжатый вторым зажимом 13 на втором конце 4 эластичного баллона 2, и по меньшей мере одно механическое соединение 30 между первым концом 3 и вторым концом 4 эластичного баллона 2. На этапе 1304b используют систему 18 управления исполнительно-приводным механизмом. На этапе 1306b управляют длиной 36 и формой 40 исполнительно-приводного механизма 1, 1а посредством потока рабочей текучей среды 19, протекающей из системы управления 18 через входной штуцер 16 и/или, второй входной штуцер 16а в эластичный баллон 2.
На фиг. 14 и 15 показаны варианты реализации настоящего изобретения, которые могут быть использованы в контексте способа изготовления и обслуживания воздушного летательного аппарата 78, как показано на фиг. 14, и воздушного летательного аппарата 94, как показано на фиг. 15. Во время подготовки к серийному производству пример способа 78 может включать этапы, согласно которым: на этапе 80 составляют спецификацию и проектируют воздушный летательный аппарат 94, а на этапе 82 осуществляют материально-техническое снабжение. Во время изготовления на этапе 84 изготавливают компоненты и сборочные узлы, а на этапе 86 выполняют системную интеграцию воздушного летательного аппарата 94. После этого, на этапе 88 выполняют сертификацию и доставку воздушного летательного аппарата 94, после чего на этапе 90 вводят воздушный летательный аппарат в эксплуатацию. Во время эксплуатации заказчиком на этапе 92 осуществляют регламентное обслуживание, а на этапе 94 выполняют ремонт воздушного летательного аппарата (также включая модернизацию, реконфигурацию, восстановление и т.п.).
Каждый из этапов способа 78 может быть выполнен или осуществлен системным интегратором, третьим лицом и/или компанией-оператором (например, заказчиком). В целях ясности настоящего описания системный интегратор может включать, помимо прочего, любое количество изготовителей воздушного летательного аппарата и основных системных субподрядчиков; третье лицо может включать, помимо прочего, любое количество продавцов, субподрядчиков и поставщиков; и оператор может быть авиакомпанией, лизинговой компанией, военным ведомством, обслуживающей организацией, и т.п..
Как показано на фиг. 15, воздушный летательный аппарат 94, изготовленный производственным способом 78, может содержать корпус 98 с множеством систем 96 и внутренней частью 100. Примеры систем 96 высокого уровня включают одну или большее количество двигательных установок 102, электрическую систему 104, гидравлическую систему 106 и систему 108 управления условиями окружающей среды. Кроме того, может быть включено любое количество других систем. Несмотря на то, что на чертежах показан пример из авиакосмической промышленности, принципы настоящего изобретения могут быть применены к другим отраслям промышленности, таким как автомобильная промышленность.
Устройство, описанное в настоящей заявке, может быть использовано во время любого одного или большего количества этапов способа 78 изготовления и эксплуатации. Например, компоненты или сборочные узлы, соответствующие способу 84, могут быть изготовлены или произведены способом, подобным способу изготовления компонентов или сборочных узлов, изготовленных во время ремонта воздушного летательного аппарата 94. Также, один или большее количество вариантов реализации устройства могут быть использованы, например, во время этапов 84 и 86 изготовления, что обеспечивает существенное ускорение сборки или сокращение стоимости воздушного летательного аппарата 94. Аналогично, один или большее количество вариантов реализации устройства могут быть использованы во время эксплуатации воздушного летательного аппарата 94, например, помимо прочего, на этапе 92 обслуживания и ремонта.
Несмотря на то, что варианты реализации настоящего изобретения описаны на примере некоторых вариантов реализации, следует понимать, что конкретные варианты реализации приведены в настоящем описании только в целях иллюстрации, но никак не ограничения, и специалисты могут вносить в него различные изменения.
Таким образом, показанные на чертежах варианты реализации предусматривают гидравлический исполнительно-приводной механизм. Гидравлический исполнительно-приводной механизм содержит: трубчатый эластичный баллон, имеющий первый и второй концы; расширяющийся и сжимающийся рукав, размещенный на указанном трубчатом эластичном баллоне; входной штуцер для текучей среды, который сообщается с указанным трубчатым эластичным баллоном; по меньшей мере одно механическое соединение, расположенное вдоль указанного трубчатого эластичного баллона; причем указанный гидравлический исполнительно-приводной механизм является гибким и имеет общий диаметр меньше, чей примерно 5 мм.
В показанном на чертежах варианте реализации эластичный баллон имеет наружный диаметр примерно 0,020 дюйма (0,51 мм). В показанном на чертежах варианте реализации эластичный баллон работает при давлениях текучей среды больше, чем 100 фунтов на кв. дюйм (690 кПа). В показанном на чертежах варианте реализации эластичный баллон работает при давлениях текучей среды примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа).
Показанный на чертежах вариант реализации содержит входной штуцер для текучей среды, расположенный в указанном первом конце указанного трубчатого эластичного баллона, и дополнительно содержит деталь, выбранную из второго входного штуцера для текучей среды и заглушки и расположенную в указанном втором конце указанного трубчатого эластичного баллона. В показанном на чертежах варианте реализации деталь, выбранная из второго входного штуцера для текучей среды и заглушки и расположенная в указанном втором конце указанного трубчатого эластичного баллона, содержит второй входной штуцер для текучей среды, расположенный в указанном втором конце указанного трубчатого эластичного баллона. В показанном на чертежах варианте реализации деталь, выбранная из второго входного штуцера для текучей среды и заглушки и расположенная в указанном втором конце указанного трубчатого эластичного баллона, содержит заглушку, расположенную в указанном втором конце указанного трубчатого эластичного баллона.
В другом показанном на чертежах варианте реализации гидравлический исполнительно-приводной механизм также содержит первый зажим, посредством которого обжат указанный рукав и указанный эластичный баллон на указанном входном штуцере для текучей среды в указанном первом конце указанного эластичного баллона, и второй зажим, посредством которого обжат указанный рукав и указанный эластичный баллон на указанной детали, выбранной из второго входного штуцера для текучей среды и заглушки, на указанном втором конце указанного эластичного баллона.
В показанном на чертежах варианте реализации эластичный баллон содержит эластомерный полимер. В показанном на чертежах варианте реализации по меньшей мере одно механическое соединение содержит по меньшей мере одно из следующего: первое механическое соединение, расположенное в указанном входном штуцере для текучей среды, второе механическое соединение, расположенное в указанном выбранном одном из второго входного штуцера для текучей среды и заглушки, и по меньшей мере одно механическое соединение, расположенное между указанным входным штуцером для текучей среды и указанным выбранным одним из второго входного штуцера для текучей среды и заглушки.
В показанном на чертежах варианте реализации рукав содержит расширяющуюся и сжимающуюся оплетку. В показанном на чертежах варианте реализации оплетка содержит биаксиальную оплетку.
В показанных на чертежах вариантах реализации предусмотрен другой гидравлический исполнительно-приводной механизм. Этот гидравлический исполнительно-приводной механизм содержит трубчатый эластичный баллон, имеющий первый и второй концы; расширяющийся и сжимающийся плетеный рукав, имеющий множество оплеточных полос, размещенный на указанном трубчатом эластичном баллоне; входной штуцер для текучей среды, размещенный в указанном первом конце указанного трубчатого эластичного баллона; деталь, выбранная из второго входного штуцера для текучей среды и заглушки и расположенная в указанном втором конце указанного трубчатого эластичного баллона; по меньшей мере одно механическое соединение, расположенное вдоль указанного трубчатого эластичного баллона; причем указанный гидравлический исполнительно-приводной механизм является гибким и имеет общий диаметр меньше, чем примерно 5 мм.
В показанном на чертежах варианте реализации трубчатый эластичный баллон содержит непрямой трубчатый эластичный баллон и дополнительно содержит оболочку, вмещающую указанный плетеный рукав. В показанном на чертежах варианте реализации эластичный баллон имеет наружный диаметр примерно 0,020 дюйма (0,51 мм). В показанном на чертежах варианте реализации указанный эластичный баллон работает при давлениях текучей среды больше, чем 100 фунтов на кв. дюйм (690 кПа).
Показанные на чертежах варианты реализации также предусматривают способ изготовления гидравлического исполнительно-приводного механизма. Способ включает этапы, согласно которым: используют трубчатый эластичный баллон, имеющий первый и второй концы, используют расширяющийся и сжимающийся рукав; надевают указанный рукав поверх указанного эластичного баллона; используют по меньшей мере один входной штуцер для текучей среды, находящийся в гидравлической связи с указанным трубчатым эластичным баллоном; используют по меньшей мере одно механическое соединение вдоль указанного эластичного баллона; причем указанный гидравлический исполнительно-приводной механизм является гибким и имеет общий диаметр меньше, чем примерно 5 мм. В показанном на чертежах варианте использование по меньшей мере одного входного штуцера для текучей среды, который сообщается с указанным трубчатым эластичным баллоном, включает этап, согласно которому используют входной штуцер для текучей среды и вставляют указанный входной штуцер для текучей среды в указанный первый конец указанного эластичного баллона.
В показанном на чертежах варианте реализации описанный выше способ дополнительно может включать этап, согласно которому используют заглушку и вставляют указанную заглушку в указанный второй конец указанного эластичного баллона. В показанном на чертежах варианте реализации описанный выше способ дополнительно может включать этап, согласно которому используют первый и второй зажимы и обжимают указанный рукав и указанный эластичный баллон на указанном входном штуцере для текучей среды с использованием указанного первого зажима и обжимают указанный рукав и указанный эластичный баллон на указанной заглушке с использованием указанного второго зажима.
В показанных на чертежах вариантах реализации также предусмотрен гидравлический исполнительно-приводной механизм. Гидравлический исполнительно-приводной механизм содержит: эластомерный трубчатый эластичный баллон, имеющий первый и второй концы, наружный диаметр примерно 0,020 дюйма (0,51 мм) и рабочее давление примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа); расширяющийся и сжимающийся биаксиальный оплеточный рукав, содержащий множество оплеточных полос, расположенный на указанном трубчатом эластичном баллоне и имеющий номинальный диаметр меньше, чем примерно 5 мм; первый входной штуцер для текучей среды, расположенный в указанном первом конце указанного трубчатого эластичного баллона; одну деталь, выбранную из заглушки и второго входного штуцера для текучей среды, которая расположена в указанном втором конце указанного трубчатого эластичного баллона; первое механическое соединение, расположенное в указанном первом входном штуцере для текучей среды; фиксирующую конструкцию, прикрепленную к указанному первому механическому соединению; второе механическое соединение, расположенное в указанной детали, выбранной из заглушки и второго входного штуцера для текучей среды; нагружаемую конструкцию, прикрепленную к указанному второму механическому соединению; причем указанный гидравлический исполнительно-приводной механизм является гибким и имеет общий диаметр меньше, чем примерно 5 мм.
В показанных на чертежах вариантах реализации также предусмотрен другой способ изготовления гибкого гидравлического исполнительно-приводного механизма. Этот способ включает этапы, согласно которым: используют эластомерный трубчатый эластичный баллон, имеющий первый и второй концы, наружный диаметр примерно 0,02 дюйма (0,51 мм) и рабочее давление примерно между 300-600 фунтов на кв. дюйм (2010-4020 кПа), используют расширяющийся и сжимающийся биаксиальный оплеточный рукав, содержащий множество оплеточных полос, размещенный на указанном трубчатом эластичном баллоне и имеющий номинальный диаметр примерно 0,050 дюйма (1,27 мм), надевают указанный рукав поверх указанного эластичного баллона, используют входной штуцер для текучей среды, расположенный в указанном первом конце указанного трубчатого эластичного баллона, и заглушку, расположенную в указанном втором конце указанного трубчатого эластичного баллона, используют первый и второй зажимы и обжимают указанный рукав и указанный эластичный баллон на указанном входном штуцере для текучей среды с использованием указанного первого зажима и обжимают указанный рукав и указанный эластичный баллон на указанной заглушке с использованием указанного второго зажима, используют первое механическое соединение, расположенное в указанном входном штуцере для текучей среды, используют второе механическое соединение, расположенное в указанной заглушке, и используют множество механических соединений между указанным первым механическим соединением и указанным вторым механическим соединением.
В показанных на чертежах вариантах реализации также предусмотрен другой способ управления гибким миниатюрным Мак-Киббеновским исполнительно-приводным механизмом. Этот способ включает этапы, согласно которым используют исполнительно-приводной механизм по меньшей мере с одной точкой механического крепления, имеющий общий диаметр меньше, чем примерно 5 мм, используют систему управления исполнительно-приводным механизмом, управляют потоком рабочей текучей среды, протекающей от указанной системы управления исполнительно-приводным механизмом через указанный входной штуцер для текучей среды в указанный эластичный баллон, перемещают указанную точку механического крепления путем расширения указанного эластичного баллона и указанного рукава и управляют потоком рабочей текучей среды, протекающей из указанного эластичного баллона через указанный входной штуцер для текучей среды и назад в указанную систему управления исполнительно-приводным механизмом.
Показанные на чертежах варианты реализации также включают другой способ управления длиной и формой гибкого гидравлического исполнительно-приводного механизма. Указанный способ включает этапы, согласно которым используют гибкий гидравлический исполнительно-приводной механизм, имеющий общий диаметр меньше, чем примерно 5 мм, содержащий: эластичный баллон, имеющий первый и второй концы и рабочее давление больше, чем примерно 100 фунтов на кв. дюйм (690 кПа); расширяющийся и сжимающийся рукав, размещенный поверх указанного эластичного баллона и имеющий по меньшей мере одну точку механического крепления между первым и вторым концами эластичного баллона, используют систему управления исполнительно-приводным механизмом и управляют длиной и формой указанного исполнительно-приводного механизма путем регулирования потока рабочей текучей среды, протекающей из указанной системы управления исполнительно-приводным механизмом по меньшей мере через одно из указанного первого штуцера для текучей среды и указанного второго входного штуцера для текучей среды в указанный эластичный баллон.
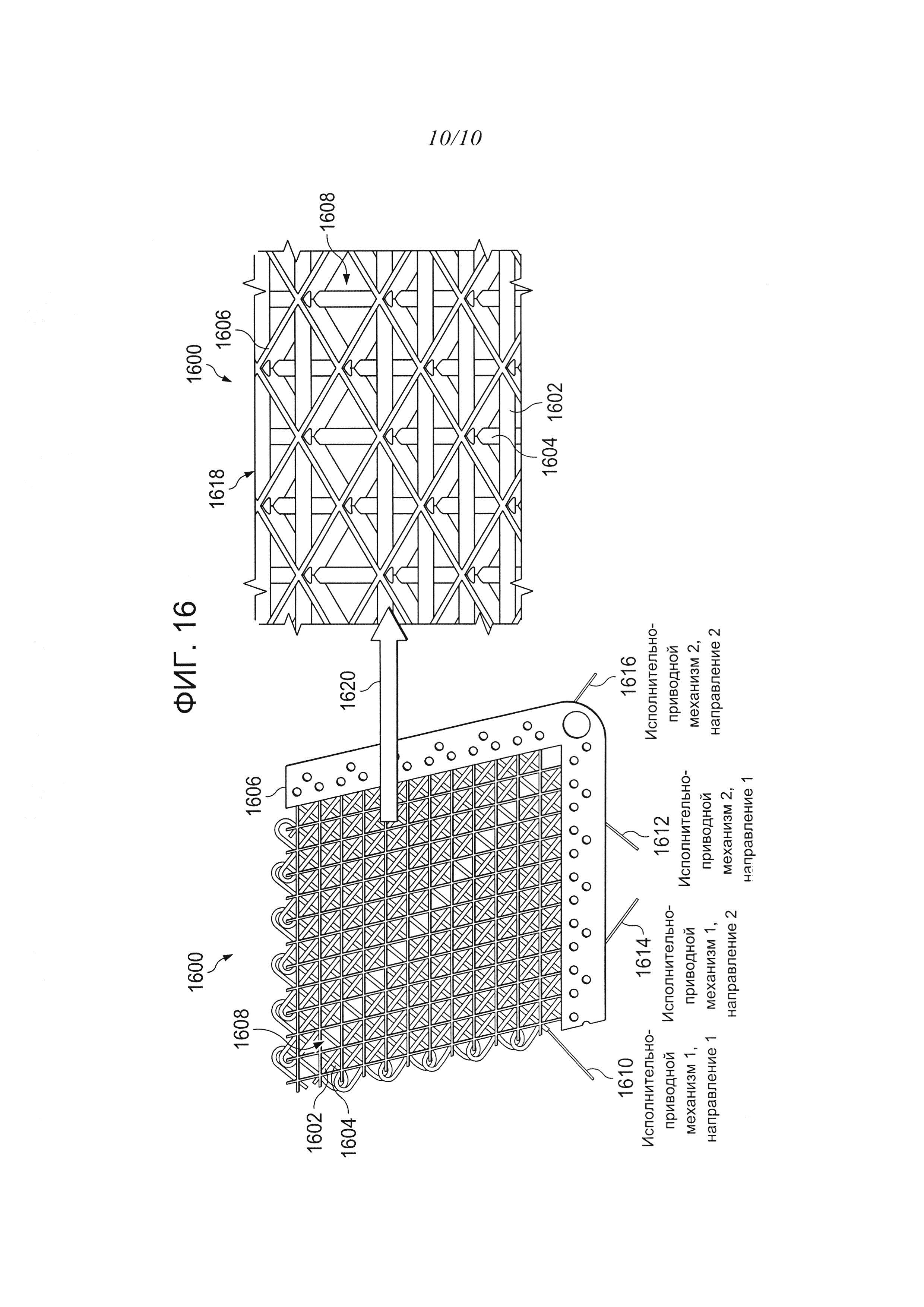
На фиг. 16 показана Мак-Киббеновская структура согласно показанному на чертежах варианту реализации. На фиг. 16 показано осуществление Мак-Киббеновского исполнительно-приводного механизма, показанного на фиг. 1-11А.
Мак-Киббеновская структура 1600 может быть активирована с использованием давления текучей среды, которое может быть пневматическим или гидравлическим. Термин "текучая среда" в настоящей заявке предусматривает использование любого из терминов, таких как "гидравлическое давление" и "пневматическое давления", или даже их комбинацию.
Мак-Киббеновская структура 1600 может быть подходящей для использования в областях применения, связанных с трансформацией, таких как палубный разведывательно-ударный БПЛА (UCLASS) и развертываемый патрулирующий летательный аппарат. Более конкретно, Мак-Киббеновская структура 1600 может быть подходящей для трансформирующих деформаций композиционных материалов.
Одна задача Мак-Киббеновской структуры 1600 состоит во встраивании активации в деформируемую составную обшивку или основную конструкцию. Встроенная распределенная активация, показанная на чертежах вариантов реализации в уменьшенном масштабе, позволяет реализовать способ глобального распределения активационных нагрузок вдоль трансформирующейся обшивки на заданной площади. Одно преимущество этого распределенного подхода состоит в том, что он ограничивает нежелательную деформацию, являющуюся следствием активационных нагрузок, приложенных по периметру или к границе края. Этот результат устраняет необходимость прохождения элементов жесткости от периметра, где могут быть приложены активационные нагрузки, к внутренним частям панели обшивки. Напротив, такие распределенные, пространственно приспособленные схемы активации могут быть приняты уменьшенными и более гомогенными плоскими панелями обшивки, имеющими повышенную жесткость. Пространственное приспосабливание локализованной активационной деформации не требует использования отдельных исполнительно-приводных механизмов. Напротив, нить Макс-Киббеновских исполнительно-приводных механизмов, описанная в настоящей заявке, и Мак-Киббеновская структура 1600, может быть произвольно прикреплена к сердцевине конструкции во множестве различных мест путем простой заливки компаундом окружности исполнительно-приводного механизма, размещенного вплотную к основному конструктивному элементу или проходящего сквозь него. Произвольное прикрепление может включать приложение различных предварительных деформаций или смещений между креплениями, в результате чего в указанных локализованных областях путем подачи одиночного дистанционного сигнала давления текучей среды могут быть созданы дифференциальные активационные напряжения и силы.
Как показано на фиг. 16, Мак-Киббеновская структура 1600 содержит один или большее количество Мак-Киббеновских исполнительно-приводных механизмов, таких как Мак-Киббеновский исполнительно-приводной механизм 1602 и Мак-Киббеновский исполнительно-приводной механизм 1604, вплетенные в каркас 1606. В одном показанном на чертежах варианте реализации Мак-Киббеновский исполнительно-приводной механизм 1602 и Мак-Киббеновский исполнительно-приводной механизм 1604 представляют собой одиночный Мак-Киббеновский исполнительно-приводной механизм, который выполнен переплетенным с образованием перекрестной конфигурации, как показано на чертеже и описано ниже. Обычно предпочтительным является использование одиночной нити на основе Мак-Киббеновского исполнительно-приводного механизма, поскольку одиночная нить упрощает указанное количество заглушек или соединений, используемых для замыкания контура текучей среды. Однако в другом показанном на чертежах варианте реализации Мак-Киббеновский исполнительно-приводной механизм 1602 и Мак-Киббеновский исполнительно-приводной механизм 1604 представляют собой отдельные Мак-Киббеновские исполнительно-приводные механизмы, которые сплетены, как показано на чертеже и описано ниже.
Каркас 1606 может быть сеткой, поддерживаемой одной или большим количеством сторон, как показано на чертежах, но может быть выполнена во множественных различных формах. Каркас 1606 может быть изготовлен из металла, керамики, композитов, пластмасс или других соответствующих материалов, достаточно прочных для выдерживания сил, которые могут быть приложены Мак-Киббеновским исполнительно-приводным механизмом 1602 и Мак-Киббеновским исполнительно-приводным механизмом 1604. В показанном на чертежах варианте реализации не все ячейки каркаса обязательно должны быть заполнены Мак-Киббеновским исполнительно-приводным механизмом 1604 и Мак-Киббеновским исполнительно-приводным механизмом 1602, но могут содержать только один из указанных механизмов или не содержать ни одного. Например, сетка 1608 содержит только Мак-Киббеновский исполнительно-приводной механизм 1604, как показано на фиг. 16, хотя такое расположение не является единственным возможным расположением.
Как показано на фиг. 16, Мак-Киббеновский исполнительно-приводной механизм 1602 вплетен в ячейки Мак-Киббеновской структуры 1600 вдоль первого направления, соответствующего оси 1610 или осям, параллельным оси 1610. Например, ось 1612 параллельна оси 1610. Напротив, Мак-Киббеновский исполнительно-приводной механизм 1604 вплетен в ячейки Мак-Киббеновской структуры 1600 вдоль второго направления, соответствующего оси 1614 или осям, параллельным оси 1614. Например, ось 1616 параллельна оси 1614.
Секция 1618 показывает расширенный вид части Мак-Киббеновской структуры 1600, показанной в общем в направлении стрелки 1620. Мак-Киббеновская структура 1600 в этом случае также содержит Мак-Киббеновский исполнительно-приводной механизм 1602 и Мак-Киббеновский исполнительно-приводной механизм 1604, которые вплетены в ячейки каркаса 1606.
Ниже описано конкретное выполнение Мак-Киббеновской структуры 1600. Также могут быть использованы различные варианты выполнения; таким образом, данное конкретное выполнение Мак-Киббеновской структуры 1600 не обязательно ограничивает пункты приложенной формулы.
Мак-Киббеновская структура 1600 может быть изготовлена из Мак-Киббеновских исполнительно-приводных механизмов диаметром 2×0,035 дюйма (50,8-0,9 мм), ориентированных под углом 90° относительно друг друга. Такое расположение обеспечивает возможность противодействующей активации и облегчает ее осуществление. Мак-Киббеновская структура 1600 послойно сформирована между двумя металлическими сетками или ячейками толщиной 0,025 дюйма (0,635 мм), выполненными из высокопрочной стали путем химического травления. Внутри стенок ячеек сформированы вырезы для приема одного или большего количества исполнительно-приводных механизмов, проходящих из ячейки в ячейку. Указанная двухслойная сетка с однонаправленным исполнительно-приводным механизмом расположена над вторым комплектом сетки для образования схемы противодействующей активации.
Таким образом, Мак-Киббеновская структура 1600 интегрирована в сердцевину толщиной 0,1 дюйма (2,54 мм) и обеспечивает сдвиговые деформации со сдвигом 15%. Соответственно, вместо создания 144 индивидуально определяемых биаксиальных областей нагнетания с соответствующими коллекторами, необходимых для удовлетворения потребностей в распределенной активации, в данном случае представлены только 4 канала нагнетания для упрощения соединения со схемой нагнетания. Такой вариант выполнения Мак-Киббеновской структуры 1600 возможен только с использованием уменьшенных Мак-Киббеновских исполнительно-приводных механизмов согласно показанными на чертежах вариантам реализации. Используемый в настоящей заявке термин "уменьшенный" Мак-Киббеновский исполнительно-приводной механизм означает Мак-Киббеновский исполнительно-приводной механизм, который имеет диаметр примерно 0,035 дюйма (0,9 мм) или меньше. Уменьшенный Мак-Киббеновский исполнительно-приводной механизм обычно используют с давлением текучей среды примерно между 150 фунтов на кв. дюйм (1005 кПа) и примерно 300 фунтов на кв. дюйм (2010 кПа), но указанное давление может быть больше или меньше согласно различным показанным на чертежах вариантам реализации.
Ниже описаны дополнительные конкретные варианты реализации "малоразмерных" Мак-Киббеновских исполнительно-приводных механизмов, а также их преимущества перед известными Мак-Киббеновскими исполнительно-приводными механизмами. Для малоразмерного Мак-Киббеновского исполнительно-приводного механизма поверхностная оплетка шланга является важным фактором, так что если в трубке нагнетают давление изнутри, указанная трубка не имеет возможности локального расширения и чрезмерного раздувания. В показанном на чертежах варианте реализации поверхностная оплетка может содержать восемь нитей, имеющих массу примерно 200 денье, которые сплетены поверх наружного диаметра трубчатого эластичного баллона. Может быть использовано большее количество нитей и/или могут быть использованы нити с повышенной массой.
Трубчатый эластичный баллон может быть выполнен из силикона, но также могут быть использованы другие материалы. Нити могут быть выполнены из пара-арамидных синтетических волокон, таких как поли-пара-фенилен терефталамид (имеющийся в продаже под фирменным названием KEVLAR®), но могут быть использованы другие материалы.
Малоразмерные Мак-Киббеновские исполнительно-приводные механизмы имеют преимущества перед большеразмерными Мак-Киббеновскими исполнительно-приводными механизмами. Например, в малоразмерных Мак-Киббеновских исполнительно-приводных механизмах непрерывно поддерживаемая оплетка на наружной поверхности предотвращает нежелательные локализованные радиальные деформации. Кроме того, результирующая покрытая оплеткой труба может быть выполнена сколь угодно длинной и укорочена до необходимой длины. Большеразмерные Мак-Киббеновские исполнительно-приводные механизмы обычно имеют ограниченную длину. Таким образом, малоразмерный Мак-Киббеновский исполнительно-приводной механизм может быть использован для осуществления Мак-Киббеновского исполнительно-приводного механизма 1602 и Мак-Киббеновского исполнительно-приводного механизма 1604 в форме одиночного длинного Мак-Киббеновского исполнительно-приводного механизма, в то время как большеразмерные Мак-Киббеновские исполнительно-приводные механизмы не могут быть использованы в соответственно увеличенной конструкции. Иными словами, большеразмерный Мак-Киббеновский исполнительно-приводной механизм не может быть использован для осуществления Мак-Киббеновского исполнительно-приводного механизма 1602 и Мак-Киббеновского исполнительно-приводного механизма 1604 в форме одиночного длинного Мак-Киббеновского исполнительно-приводного механизма.
Другое преимущество малоразмерного Мак-Киббеновского исполнительно-приводного механизма состоит в возможности использования малоразмерного Мак-Киббеновского исполнительно-приводного механизма в традиционном текстильном производственном оборудовании, так что ткани из "нити" на основе такого исполнительно-приводного механизма могут быть изготовлены или вплетены. Открытые концы могут быть закрыты или соединены с коллектором для составления контура текучей среды. Таким образом, ткани, в частности уточно-вязанные ткани, могут быть изготовлены из одиночной непрерывной нити, которая является исполнительно-приводным механизмом. Использование одиночной нити минимизирует количество заглушек или соединений, что приводит к упрощению физического расположения, используемого для завершения контура текучей среды. Большеразмерные Мак-Киббеновские исполнительно-приводные механизмы не могут быть интегрированы с использованием такого текстильного оборудования.
Показанные на чертежах варианты реализации отличаются от известных Мак-Киббеновских исполнительно-приводных механизмов также и в других отношениях. Например, показанные на чертежах варианты реализации содержат толстостенную трубку с относительным диаметром (t/D≤2), в то время как в известных Мак-Киббеновских исполнительно-приводных механизмах используются тонкостенные трубчатые элементы (от t/D>2 до примерно t/D<10). Для малоразмерных Мак-Киббеновских исполнительно-приводных механизмов создание давления в трубке требует значительно увеличенной деформации стенки перед появлением периметральных радиальных изменений, которые производят кинематическую активацию, ожидаемую от Мак-Киббеновских исполнительно-приводных механизмов. Для вычисления механических характеристик, при которых сдвиговая деформация имеет нетривиальное проявление, стандартные значения относительного диаметра толстостенной трубки ограничены величиной t/D<10.
Не смотря на то, что известные толстостенные Мак-Киббеновские исполнительно-приводные механизмы требуют более высоких давлений, чем тонкостенные варианты, толстая стенка обеспечивают надежную работу, защищенную от проколов и порезов из-за кинематического перемещения материала оплетки. Среди известных коммерческих продуктов наружные диаметры меньше, чем 0,125 дюйма (3,175 мм), обычно являются недоступными. Кроме того, доступные Мак-Киббеновские исполнительно-приводные механизмы обычно имеют отношение длины К диаметру меньше, чем 10:1. Напротив, в некоторых из показанных на чертежах вариантах реализации использованы непрерывные исполнительно-приводные механизмы, у которых отношения длины к диаметру >25 и чаще >100.
Кроме того, показанные на чертежах варианты реализации отличаются от известных Мак-Киббеновских исполнительно-приводных механизмов гибкостью, произвольным характером места крепления и дифференциальными условиями предварительных деформаций между местами крепления. Кроме того, увеличенная длина и уменьшенный диаметр малоразмерных Мак-Киббеновских исполнительно-приводных механизмов обеспечивают возможность их сплетения в ткани и встраивание на большой площади непосредственно в композитные многослойные структуры. От этих композитных структур может потребоваться жесткость, согласованная с активационным слоем для использования преимуществ активационного смещения. Большеразмерные Мак-Киббеновские исполнительно-приводные механизмы не могут быть использованы для имеющих увеличенную площадь тканей и, в частности, являются неподходящими для использования в композитных многослойных структурах.
Кроме того, увеличенная длина показанных на чертежах вариантов реализации обеспечивает минимальное количество соединений для текучей среды, которые к тому же предпочтительно расположены на краю трансформирующейся панели, т.е. там, где контуры текучей среды могут быть замкнуты в коллекторе. Для композитных многослойных структур такое расположение является невозможным с использованием большеразмерных исполнительно-приводных механизмов, поскольку для них потребуется увеличенное количество соединений с возможностью сообщения по сравнению с малоразмерными Мак-Киббеновскими исполнительно-приводными механизмами, имеющими большую длину.
Таким образом, на чертежах показаны различные варианты реализации. Согласно одному показанному на чертежах варианту реализации предложен исполнительно-приводной механизм на основе текучей среды. Указанный исполнительно-приводной механизм может быть трубчатым эластичным баллоном, имеющим первый и второй концы и наружный диаметр примерно 0,020 дюйма (0,51 мм) или меньше и внутренний диаметр примерно 0,010 дюйма (0,25 мм) или меньше, в котором отношение толщины к диаметру составляет по меньшей мере 2. Исполнительно-приводной механизм на основе текучей среды дополнительно может содержать оплеточный рукав, покрывающий наружный диаметр трубчатого эластичного баллона, причем указанный оплеточный рукав образован по меньшей мере примерно восемью нитями с массой по меньшей мере примерно 200 денье, при этом нити сплетены поверх наружного диаметра трубчатого эластичного баллона, причем трубчатый эластичный баллон и оплеточный рукав имеют комбинированный общий диаметр примерно 0,035 дюйма (0,9 мм) или меньше, и при этом трубчатый эластичный баллон и оплеточный рукав имеют отношение длины к диаметру примерно от 25 до 1 или больше. Исполнительно-приводной механизм на основе текучей среды дополнительно может содержать входной штуцер для текучей среды, сообщающийся по текучей среде с трубчатым эластичным баллоном. Указанный исполнительно-приводной механизм дополнительно может содержать по меньшей мере одно механическое соединение, расположенное вдоль трубчатого эластичного баллона.
Согласно другому показанному на чертежах варианту реализации волокна, используемые для изготовления оплеточного рукава, в достаточной степени распределены поверх трубчатого эластичного баллона, так что оплеточный рукав не врезается в трубчатый эластичный баллон, но вместе с тем поддерживает биаксиальную кинематику, обеспечивающую возможность активации исполнительно-приводного механизма на основе текучей среды. В показанном на чертежах варианте реализации эластичный баллон работает при давлениях текучей среды примерно между 150-600 фунтов на кв. дюйм (1035-4140 кПа).
В показанном на чертежах варианте реализации входной штуцер для текучей среды расположен в первом конце трубчатого эластичного баллона и дополнительно содержит деталь, выбранную из второго входного штуцера для текучей среды и заглушки и расположенную на втором конце трубчатого эластичного баллона. В этом случае деталь, выбранная из второго входного штуцера для текучей среды и заглушки и расположенная на втором конце трубчатого эластичного баллона, может быть вторым входным штуцером для текучей среды, расположенным на втором конце трубчатого эластичного баллона. Согласно другому варианту реализации деталь, выбранная из второго входного штуцера для текучей среды и заглушки и расположенная на втором конце трубчатого эластичного баллона, может быть заглушкой, расположенной на втором конце трубчатого эластичного баллона.
В другом показанном на чертежах варианте реализации исполнительно-приводной механизм на основе текучей среды дополнительно содержит первый зажим, обжимающий рукав и эластичный баллон на входном штуцере для текучей среды, который расположен в первом конце эластичного баллона, и второй зажим, обжимающий рукав и эластичный баллон на детали, выбранной из второго входного штуцера для текучей среды и заглушки, на втором конце эластичного баллона. В другом показанном на чертежах варианте реализации по меньшей мере одно механическое соединение может быть по меньшей мере одним из следующего: первое механическое соединение, расположенное на входном штуцере для текучей среды, второе механическое соединение, расположенное в детали, выбранной из второго входного штуцера для текучей среды и заглушки, и по меньшей мере одно механическое соединение, расположенное между входным штуцером для текучей среды и деталью, выбранной из второго входного штуцера для текучей среды и заглушки. В этом случае оплеточный рукав может быть биаксиальной оплеткой.
Согласно показанным на чертежах вариантам реализаций исполнительно-приводной механизм на основе текучей среды выполнен переплетенным с образованием перекрестной конфигурации и поддерживается каркасом, содержащим сетку. Согласно показанным на чертежах вариантам реализации оплеточный рукав может содержать переплетенные пряди или волокна, причем переплетенные пряди или волокна, используемые при изготовлении оплеточного рукава, в достаточной степени распределены поверх трубчатого эластичного баллона, так что указанные плетеные пряди или волокна не врезаются в трубчатый эластичный баллон, но вместе с тем поддерживают биаксиальную кинематику, обеспечивающую возможность активации исполнительно-приводного механизма на основе текучей среды.
Согласно показанным на чертежах вариантам реализации также предложено устройство. Указанное устройство включает каркас, содержащий сетку и исполнительно-приводной механизм на основе текучей среды. Указанный исполнительно-приводной механизм может содержать трубчатый эластичный баллон, имеющий первый и второй концы, а также наружный диаметр примерно 0,020 дюйма (0,51 мм) или меньше и внутренний диаметр примерно 0,010 дюйма (0,25 мм) или меньше, в котором отношение толщины к диаметру составляет по меньшей мере 2. Исполнительно-приводной механизм на основе текучей среды дополнительно может содержать оплеточный рукав, покрывающий наружный диаметр трубчатого эластичного баллона, причем оплеточный рукав образован по меньшей мере примерно восемью нитями, имеющими массу по меньшей мере примерно 200 денье, при этом указанные нити переплетены поверх наружного диаметра трубчатого эластичного баллона, причем трубчатый эластичный баллон и оплеточный рукав имеют комбинированный общий диаметр примерно 0,035 дюйма (0,9 мм) или меньше, и при этом трубчатый эластичный баллон и оплеточный рукав имеют отношение длины к диаметру примерно от 25 до 1 или больше. Исполнительно-приводной механизм на текуче среде может быть выполнен переплетенным с образованием перекрестной конфигурации по меньшей мере в некоторых ячейках сетки. Исполнительно-приводной механизм на основе текучей среды дополнительно может содержать входной штуцер для текучей среды, расположенный в первом конце трубчатого эластичного баллона. Во втором конце трубчатого эластичного баллона может быть расположена деталь, выбранная из второго входного штуцера для текучей среды и заглушки. По меньшей мере одно механическое соединение может быть расположено вдоль трубчатого эластичного баллона.
В показанном на чертежах варианте реализации трубчатый эластичный баллон может быть непрямым трубчатым эластичным баллоном и дополнительно может быть оболочкой, вмещающей оплеточный рукав. В показанном на чертежах варианте реализации исполнительно-приводной механизм на основе текучей среды является единственным механизмом; вплетенным по меньшей мере в некоторые ячейки сетки. В показанном на чертежах варианте реализации каркас расположен внутри композитной многослойной структуры.
В показанных на чертежах вариантах реализации также предложен способ изготовления исполнительно-приводного механизма на основе текучей среды. Способ может включать этапы, согласно которым используют трубчатый эластичный баллон, имеющий первый и второй концы, а также имеющий наружный диаметр примерно 0,020 дюйма (0,51 мм) или меньше и внутренний диаметр примерно 0,010 дюйма (0,25 мм) или меньше, в котором отношение толщины к диаметру составляет по меньшей мере 2. Способ дополнительно может включать этапы, согласно которым используют оплеточный рукав, покрывающий наружный диаметр трубчатого эластичного баллона, причем оплетка образована по меньшей мере примерно восемью нитями с массой по меньшей мере примерно 200 денье, нити переплетены поверх наружного диаметра трубчатого эластичного баллона, трубчатый эластичный баллон и оплеточный рукав имеют комбинированный общий диаметр примерно 0,035 дюйма (0,9 мм) или меньше, и трубчатый эластичный баллон и оплеточный рукав имеют отношение длины к диаметру примерно от 25 до 1 или больше. Способ дополнительно может включать этап, на котором надевают оплеточный рукав поверх трубчатого эластичного баллона. Способ дополнительно может включать этап, на котором используют по меньшей мере один входной штуцер для текучей среды, сообщающийся по текучей среде с трубчатым эластичным баллоном. Способ дополнительно может включать этап, на котором используют по меньшей мере одно механическое соединение, расположенное вдоль эластичного баллона.
В показанном на чертежах варианте реализации использование по меньшей мере одного входного штуцера для текучей среды, сообщающегося по текучей среде с трубчатым эластичным баллоном, может включать этап, на которому используют входной штуцер для текучей среды и вставляют указанный входной штуцер для текучей среды в первый конец эластичного баллона. В этом случае способ дополнительно может включать этап, на котором дополнительно используют заглушку и вставляют ее во второй конец эластичного баллона.
Согласно показанному на чертеже варианту реализации способ дополнительно может включать этап, на котором исполнительно-приводной механизм на основе текучей среды вплетают в сетку каркаса. Согласно показанному на чертеже варианту реализации способ дополнительно может включать этап, на котором указанный каркас размещают в композитной многослойной структуре.
Кроме того, настоящее описание содержит варианты реализации согласно следующим пунктам:
1. Исполнительно-приводной механизм на основе текучей среды, содержащий:
трубчатый эластичный эластичный баллон, имеющий первый и второй концы, а также имеющий наружный диаметр примерно 0,020 дюйма (0,51 мм) или меньше и внутренний диаметр примерно 0,010 дюйма (0,25 мм) или меньше, в котором отношение толщины к диаметру составляет по меньшей мере 2;
оплеточный рукав, покрывающий наружный диаметр трубчатого эластичного баллона, причем оплеточный рукав образован по меньшей мере примерно восемью нитями с массой по меньшей мере примерно 200 денье, при этом нити переплетены поверх наружного диаметра трубчатого эластичного баллона, причем трубчатый эластичный баллон и оплеточный рукав имеют комбинированный общий диаметр примерно 0,035 дюйма (0,9 мм) или меньше, и при этом трубчатый эластичный баллон и оплеточный
рукав имеют отношение длины к диаметру примерно от 25 до 1 или больше;
входной штуцер для текучей среды, сообщающийся по текучей среде с трубчатым эластичным баллоном; и
по меньшей мере одно механическое соединение, расположенное вдоль трубчатого эластичного баллона.
2. Исполнительно-приводной механизм по пункту 1, в котором волокна, используемые при изготовлении оплеточного рукава, в достаточной степени распределены поверх трубчатого эластичного баллона, так что оплеточный рукав не врезается в трубчатый эластичный баллон, но вместе с тем поддерживает биаксиальную кинематику, обеспечивающую возможность активации указанного исполнительно-приводного механизма.
3. Исполнительно-приводной механизм по пункту 1, в котором эластичный баллон работает при давлениях текучей среды примерно между 150-600 фунтов на кв. дюйм (1035-4140 кПа).
4. Исполнительно-приводной механизм по пункту 1, в котором входной штуцер для текучей среды расположен на первом конце трубчатого эластичного баллона и дополнительно содержит деталь, выбранную из второго входного штуцера для текучей среды и заглушки и расположенную на втором конце трубчатого эластичного баллона.
5. Исполнительно-приводной механизм по пункту 4, в котором указанная деталь, выбранная из второго входного штуцера для текучей среды и заглушки и расположенная на втором конце трубчатого эластичного баллона, содержит второй входной штуцер для текучей среды, расположенный на втором конце трубчатого эластичного баллона.
6. Исполнительно-приводной механизм по пункту 4, в котором указанная деталь, выбранная из второго входного штуцера для текучей среды и заглушки и расположенная на втором конце трубчатого эластичного баллона, содержит заглушку, расположенную на втором конце трубчатого эластичного баллона.
7. Исполнительно-приводной механизм по пункту 6, дополнительно содержащий первый зажим, обжимающий рукав и эластичный баллон на входном штуцере для текучей среды, на первом конце эластичного баллона, и второй зажим, обжимающий рукав и эластичный баллон на детали, выбранной из второго входного штуцера для текучей среды и заглушки, на втором конце эластичного баллона.
8. Исполнительно-приводной механизм по пункту 4, в котором по меньшей мере одно механическое соединение содержит по меньшей мере одно из следующего: первое механическое соединение, расположенное во входном штуцере для текучей среды, второе механическое соединение, расположенное в детали, выбранной из второго входного штуцера для текучей среды и заглушки, и по меньшей мере одно механическое соединение, расположенное между входным штуцером для текучей среды и деталью, выбранной из второго входного штуцера для текучей среды и заглушки.
9. Исполнительно-приводной механизм по пункту 8, в котором оплеточный рукав содержит биаксиальную оплетку.
10. Исполнительно-приводной механизм по пункту 1, который выполнен переплетенным с образованием перекрестной конфигурации и поддерживается каркасом, содержащим сетку.
11. Исполнительно-приводной механизм по пункту 1, в котором оплеточный рукав содержит переплетенные пряди или волокна, причем указанные переплетенные пряди или волокна, используемые при изготовлении оплеточного рукава, в достаточной степени распределены поверх трубчатого эластичного баллона, так что указанные плетеные пряди или волокна не врезаются в трубчатый эластичный баллон, но вместе с тем поддерживают биаксиальную кинематику, обеспечивающую возможность активации флюидного исполнительно-приводного механизма.
12. Устройство, содержащее:
каркас, содержащий сетку;
исполнительно-приводной механизм на основе текучей среды; содержащий:
трубчатый эластичный баллон, имеющий первый и второй концы, а также имеющий наружный диаметр примерно 0,020 дюйма (0,51 мм) или меньше и внутренний диаметр примерно 0,010 дюйма (0,25 мм) или меньше, в котором отношение толщины к диаметру составляет по меньшей мере 2;
оплеточный рукав, покрывающий наружный диаметр трубчатого эластичного баллона, причем
оплетка образована по меньшей мере примерно восемью нитями с массой по меньшей мере примерно 200 денье,
нити переплетены поверх наружного диаметра трубчатого эластичного баллона,
трубчатый эластичный баллон и оплеточный рукав имеют комбинированный общий диаметр примерно 0,035 дюйма (0,9 мм) или меньше, и
трубчатый эластичный баллон и оплеточный рукав имеют отношение длины к диаметру примерно от 25 до 1 или больше;
причем указанный исполнительно-приводной выполнен переплетенным с образованием перекрестной конфигурации по меньшей мере в некоторых ячейках сетки;
входной штуцер для текучей среды, расположенный в первом конце трубчатого эластичного баллона;
выбранное одно из второго входного штуцера для текучей среды и заглушки, установленное на втором конце трубчатого эластичного баллона; и
по меньшей мере одно механическое соединение, расположенное вдоль трубчатого эластичного баллона.
13. Устройство по пункту 12, в котором трубчатый эластичный баллон содержит непрямой трубчатый эластичный баллон и дополнительно содержит оболочку, вмещающую оплеточный рукав.
14. Устройство по пункту 12, в котором указанный исполнительно-приводной механизм вплетен по меньшей мере только в некоторых ячейках сетки.
15. Устройство по пункту 12, в котором каркас расположен внутри композитной многослойной структуры.
16. Способ изготовления исполнительно-приводного механизма на основе текучей среды, включающий этапы, согласно которым:
используют трубчатый эластичный баллон, имеющий первый и второй концы, а также имеющий наружный диаметр примерно 0,020 дюйма (0,51 мм) или меньше и внутренний диаметр примерно 0,010 дюйма (0,25 мм) или меньше, в котором отношение толщины к диаметру составляет по меньшей мере 2,
используют оплеточный рукав, покрывающий наружный диаметр трубчатого эластичного баллона, причем
оплетка образована по меньшей мере примерно восемью нитями с массой по меньшей мере примерно 200 денье,
нити переплетены поверх наружного диаметра трубчатого эластичного баллона,
трубчатый эластичный баллон и оплеточный рукав имеют комбинированный общий диаметр примерно 0,035 дюйма (0,9 мм) или меньше, и
трубчатый эластичный баллон и оплеточный рукав имеют отношение длины к диаметру примерно от 25 до 1 или больше,
надевают оплеточный рукав поверх трубчатого эластичного баллона, используют по меньшей мере один входной штуцер для текучей среды, сообщающийся по текучей среде с трубчатым эластичным баллоном, и
используют по меньшей мере одно механическое соединение, расположенное вдоль эластичного баллона.
17. Способ по пункту 16, согласно которому использование по меньшей мере одного входного штуцера для текучей среды, сообщающийся по текучей среде с трубчатым эластичным баллоном, включает этап, на котором используют входной штуцер для текучей среды и вставляют его в первый конец эластичного баллона.
18. Способ по пункту 17, дополнительно включающий этапы, на котором используют заглушку и вставляют ее во второй конец эластичного баллона.
19. Способ по пункту 16, дополнительно включающий этапы, на котором вплетают исполнительно-приводной механизм на основе текучей среды в сетку каркаса.
20. Способ по пункту 16, дополнительно включающий этапы, на котором каркас размещают в композитной многослойной структуре.
Описание различных показанных на чертежах вариантов реализации представлено выше в целях иллюстрации и объяснения и не является исчерпывающим или ограничивающим объем защиты настоящего изобретения согласно вариантам реализации в описанной форме. Для специалистов могут быть очевидными возможные модификации и изменения настоящего изобретения. Кроме того, различные показанные на чертежах варианты реализации могут содержать различные особенности, отличающиеся от особенностей других показанных на чертежах вариантов реализации. Вариант реализации или выбранные варианты реализации выбраны и описаны для наилучшего объяснения принципов действия настоящего изобретения, его практического применения и облегчения понимания специалистами того, насколько различные варианты реализации настоящего изобретения с различными модификациями подходят для конкретного использования.
Реферат
Предложен гидравлический исполнительно-приводной механизм и способ его изготовления. Механизм содержит трубчатый эластичный баллон, имеющий первый и второй концы, расширяющийся и сжимающийся рукав, размещенный на трубчатом эластичном баллоне, входной штуцер для текучей среды, который сообщается с трубчатым эластичным баллоном, и по меньшей мере одно механическое соединение, расположенное вдоль трубчатого эластичного баллона. Гидравлический исполнительно-приводной механизм может быть гибким и иметь общий диаметр меньше, чем примерно 5 мм. 2 н. и 13 з.п. ф-лы, 16 ил.
Формула
Документы, цитированные в отчёте о поиске
Механическая мышца
Комментарии