Прибор панорамный - RU2708535C1
Код документа: RU2708535C1
Чертежи

Описание
Изобретение относится к оптическому приборостроению, в частности, к оптическим системам наблюдения и может быть использовано для бронетанковой техники, а так же в объектах, для которых необходим круговой обзор местности.
Известно несколько приборов кругового обзора, а именно: прицел командира панорамный ПКП-К, прицел панорамный платформенного типа ПКП-ПТ, прицел командира панорамный для модуля разведывательно-огневого ПКП-МРО, система обнаружения и прицеливания оптико-электронная ОЭС ОП (каталог ОАО «ПЕЛЕНГ» «Специальная оптоэлектроника для бронетанковой техники», 2016 г.) и прибор панорамный разработки АО ВОМЗ, показанный на танковом биатлоне 2014 г. и на выставке «Армия 2015».
В прицеле командира панорамном ПКП-К два оптических канала для наблюдения за окружающим пространством: оптический телевизионный и оптический тепловизионный, каждый с тремя полями зрения - широким, узким и узким с электронным увеличением 2х. Но в данном прицеле отсутствует обзорный канал с полем зрения большим, чем в телевизионном и тепловизионном каналах у широких полей зрения. Каналы с обзорными полями зрения имеются в телевизионных каналах прицела панорамного платформенного типа ПКП-ПТ, прицела командира панорамного для модуля разведывательно-огневого ПКП-МРО, системы обнаружения и прицеливания оптико-электронной ОЭС ОП и в приборе панорамном разработки АО ВОМЗ. Телевизионные каналы данных приборов используются только в дневное время суток и при нормированных условиях - метеорологической дальности видения более 10 км и освещенности не менее 5000 лк, а при отсутствии обзорного поля зрения у прицелов с тепловизионными каналами уменьшается возможность обнаружения целей в ночное время.
В системе обнаружения и прицеливания оптико-электронной ОЭС ОП в тепловизионном канале реализованы три поля зрения: обзорное (25°х20°), широкое (10°х8,3°), узкое с электронным увеличением 2× (10°х1,6°). Но у этой системы тепловизионный канал обнаружения и прицеливания с узким полем зрения с электронным увеличением 2× (10°х1,6°) имеет небольшой угол обзора (1,6°) по вертикальному направлению, что уменьшает вероятность захвата цели и увеличивает вероятность ее потери.
Известен также способ кругового обзора матричным фотоприемным устройством и устройство для его осуществления, описанные в патенте РФ №2445644 С1, опубл. 20.03.2012, МПК F41G 1/34, G01S 17/88, G02B 23/02. Устройство содержит азимутальную платформу с приводом и блоком управления приводом, оптическую систему и матричное фотоприемное устройство (МФПУ). Оптическая система установлена на азимутальной платформе. МФПУ установлено в фокальной плоскости оптической системы. Оптический компенсатор размещен перед МФПУ на поворотной платформе с датчиком угла поворота и выполнен в виде преломляющей призмы с четным числом N граней. Вход блока формирования синхросигналов соединен с датчиком угла, а выход - с входом кадровой синхронизации МФПУ. Ось поворотной платформы соединена с осью азимутальной платформы мультипликатором. Изобретение основано на формировании кадров электронного изображения с помощью матричного фотоприемного устройства при сканировании окружающего пространства с постоянной угловой скоростью с компенсированием смещения оптического изображения в фокальной плоскости объектива вращением оптического элемента - оптической призмы. Но у данного устройства реализовано одно поле зрения, что ограничивает поисковые возможности оператора, отсутствует система обзора по углу места, отсутствуют системы стабилизации по азимуту и углу места, отсутствуют системы наведения линии визирования по азимуту и углу места.
Наиболее близкой по технической сущности является широкопольная инфракрасная система кругового обзора, описанная в патенте РФ №2189049, опубликованном 10.09.2002, МПК F41G 1/34, G01S 3/78. Изобретение относится к технике ИК-систем наблюдения объектов по их собственному тепловому излучению в реальном масштабе времени. Система содержит установленные на платформе, вращающейся вокруг вертикальной оси, две ИК-оптические системы, выполненные в виде ИК-объективов и соответствующих им входных плоских зеркал с приводами и датчиками углов их разворота, которые оптическим переключателем поочередно сопрягаются с общим N-элементным приемником ИК-излучения, последовательно соединенным с N-канальным блоком предварительных усилителей, N-канальным аналого-цифровым преобразователем, электронным коммутатором, формирователем информационного сигнала и каналом передачи информации. Система содержит также блок управления приводами, блок формирования координат и расположенное вне платформы устройство отображения информации, связанное с каналом передачи информации. Достигаемым техническим результатом является повышение эффективности наблюдения ИК-систем кругового обзора за счет увеличения поля систематического обзора по вертикали при сохранении темпа обновления информации изменением наклона входного плоского зеркала (перемещением линии визирования) одной из упомянутых ИК-оптических систем во время обзора, проводимого другой ИК-оптической системы. Но у данной широкопольной инфракрасной системы кругового обзора происходит поочередный обзор пространства двумя одинаковыми ИК-оптическими системами попеременно работающими с одним общим N-элементным приемником ИК-излучения из-за чего может быть не обнаружена цель, находящаяся в зоне обзора неработающей ИК-оптической системы, отсутствуют системы стабилизации по горизонтальному и вертикальному направлениям, отсутствуют системы наведения линии визирования по горизонтальному и вертикальному направлениям.
Задача изобретения - расширение поисковых возможностей оператора, позволяющих проводить наблюдения стабилизированным полем зрения в любое время суток, в том числе в полной темноте, и при любых условиях видимости тепловизионным объективом с тремя оптическими полями зрения и с четвертым узким полем зрения с электронным увеличением.
Технический результат - создание прибора панорамного, обеспечивающего круговой обзор местности, как с постоянной, так и с переменной угловой скоростью, стабилизированным по двум направлениям горизонтальному и вертикальному тепловизионным каналом с тремя оптическими полями зрения: узким, широким и обзорным, формируемыми сменными блоками линз, и с четвертым узким полем зрения с электронным увеличением.
Это достигается тем, что в приборе панорамном, выполненным в виде неподвижной монтажной платформы, на которой расположены датчик угла поворота горизонтального направления и двигатель горизонтального направления, обеспечивающий вращение вокруг вертикальной оси поворотной платформе с тепловизионным объективом, в фокальной плоскости которого установлено матричное фотоприемное устройство, кроме того, в подвесе вертикального наведения, расположенном на поворотной платформе закреплены датчик угла поворота вертикального направления и двигатель вертикального направления, обеспечивающий перемещение по вертикальному направлению тепловизионному объективу, в отличие от известного, тепловизионный объектив выполнен единым и для горизонтального и для вертикального направлений, и кроме того, тепловизионный объектив выполнен с двумя сменными линзовыми блоками, поочередно вбрасываемыми на оптическую ось, образуя тепловизионный объектив с тремя дискретно переключаемыми фокусными расстояниями, а поворотная стабилизированная платформа с двумя степенями свободы по оси вертикального наведения и по оси горизонтального наведения для обзора окружающего пространства, как с постоянной, так и с переменной угловой скоростью одновременно по двум направлениям, образована поворотной платформой с подвесом вертикального направления, датчиком угла поворота вертикального направления, двигателем вертикального направления, двухосевым гироскопом, установленным в подвесе вертикального направления вместе с датчиком угла поворота горизонтального направления и двигателем горизонтального направления неподвижной монтажной платформы.
Изобретение поясняется чертежами, где:
- на фиг. 1 представлена функциональная схема прибора панорамного;
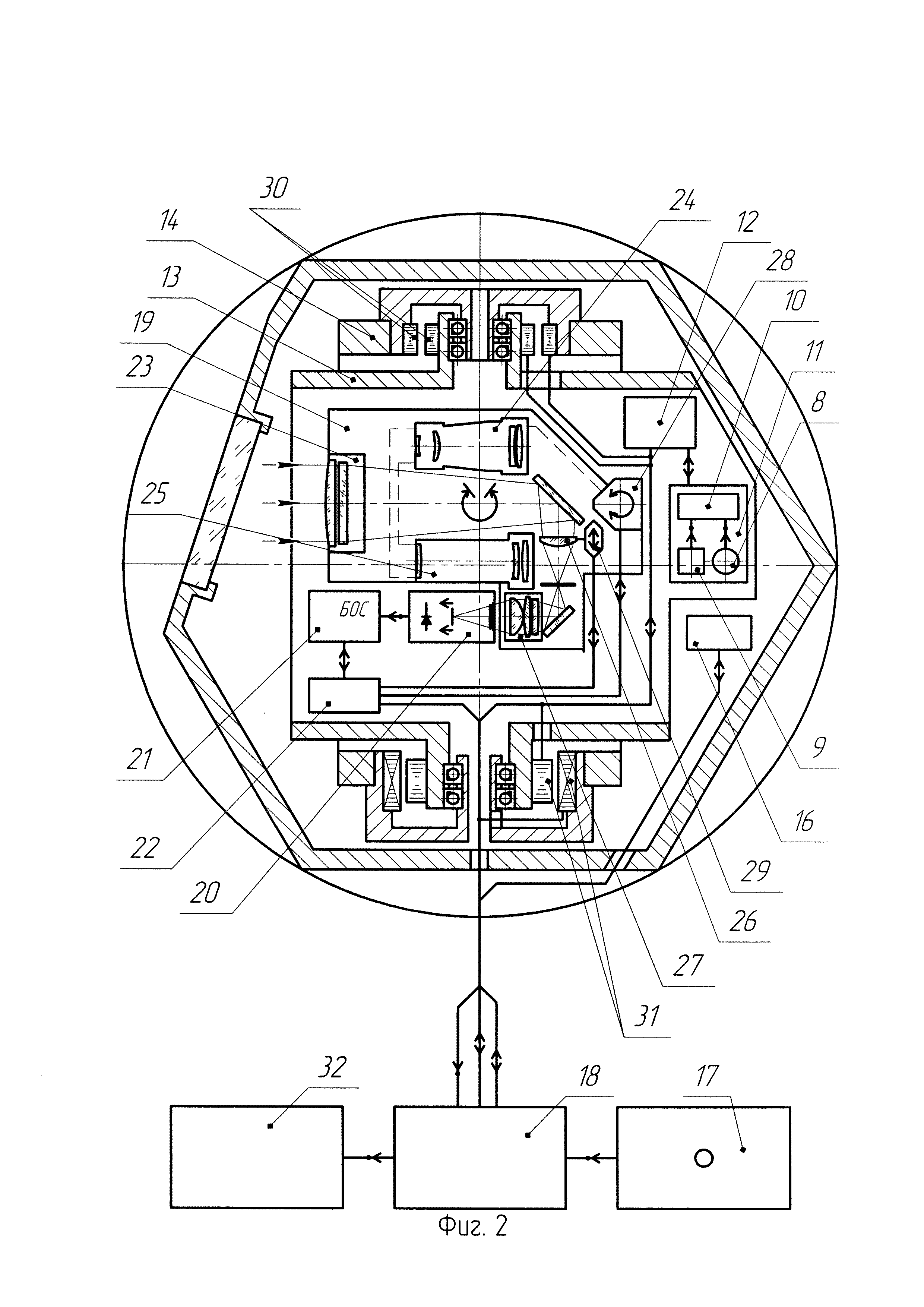
- на фиг. 2 представлена функциональная схема поворотной стабилизированной платформы;
- на фиг. 3 показано конструктивное исполнение поворотной стабилизированной платформы прибора панорамного.
Прибор панорамный (фиг. 1) состоит из неподвижной монтажной платформы 1, устанавленной снаружи объекта применения (например, на башне танка, боевой машины пехоты или на корпусе бронетранспортера), и поворотной стабилизированной платформы 2, вращающейся вместе с защитным колпаком 3 вокруг вертикальной оси. На защитном колпаке 3 выполнено отверстие закрытое защитным стеклом 4. Поворот поворотной стабилизированной платформы 2 по горизонтальному направлению, происходит с помощью, расположенного на неподвижной монтажной платформе 1, двигателя 5 горизонтального направления, на роторе 6 которого закреплена поворотная стабилизированная платформа 2. Ротор 6 механически связан с ротором датчика угла поворота 7 горизонтального направления. Стабилизацию по горизонтальному и вертикальному направлениям обеспечивают два одноосных Кориолисовых вибрационных гироскопа 8 и 9. Гироскопы 8,9 и блок электронный 10 образуют двухосевой гироскоп 11, электрически связанный с модулем 12 управления двухосевым гироскопом 11. Оси чувствительности гироскопов 8 и 9 устанавливаются в начальном положении параллельно осям стабилизации. Ось чувствительности гироскопа 8 параллельна вертикальной оси, а ось чувствительности гироскопа 9 параллельна горизонтальной оси. Гироскопы 8, 9, блок электронный 10, модуль 12 управления двухосевым гироскопом 11 закреплены на устройстве приемном 13, который вращается вокруг горизонтальной оси в подвесе 14 вертикального направления закрепленном на поворотной стабилизированной платформе 2. Двигатель 5 горизонтального направления выполняет функции датчика момента и моментного двигателя разгрузки горизонтального направления. С гироскопа 8 через блок электронный 10 на модуль 12 управления двухосевым гироскопом 11 поступают аналоговые сигналы пропорциональные угловой скорости вращения поворотной стабилизированной платформы 2 вокруг вертикальной оси. С гироскопа 9 через блок электронный 10 на модуль 12 управления двухосевым гироскопом 11 поступают аналоговые сигналы пропорциональные угловой скорости вращения устройства приемного 13 вокруг горизонтальной оси.
В процессе работы на поворотную стабилизированную платформу 2 действуют внешние возмущающие моменты, силы трения в подшипниках и вращающихся контактных устройствах, которые стремятся отклонить поворотную стабилизированную платформу 2 от заданного положения. Эти возмущающие моменты воспринимаются гироскопами 8 и 9 в виде противодействующего момента гироскопических сил и угла поворота гироскопа по оси прецессии, который посредством датчика угла преобразуется в управляющий сигнал системы разгрузки и поступает в модуль 12 управления двухосевым гироскопом 11, который формирует сигналы в блок разгрузки 15 горизонтального направления, закрепленный в неподвижной монтажной платформе 1, и в модуль разгрузки 16 вертикального направления, закрепленный на поворотной стабилизированной платформе 2.
Сигналы с блока разгрузки 15 горизонтального направления после преобразования поступают в виде сигналов управления на двигатель 5 горизонтального направления, который развивает моменты разгрузки, равные по величине и противоположные по направлению возмущающим моментам, действующим вокруг вертикальной оси поворотной стабилизированной платформы 2 при вращения устройства приемного 13 вокруг горизонтальной оси, и внешним возмущающим моментам, действующим вокруг вертикальной оси при угловых и/или линейных перемещениях объекта применения. При уравновешивании моментов вокруг вертикальной оси сохраняется стабилизированное положение линии визирования. Гироскоп 8, блок электронный 10, модуль 12 управления гироскопом 11, блок разгрузки 15 горизонтального направления, датчик угла поворота 7 горизонтального направления, двигатель 5 горизонтального направления образуют систему управления с обратной связью, в которой линия визирования сохраняет свое угловое положение неизменным.
Управление прибором панорамным проводится с помощью панели управления 17 и блока управления 18, размещаемыми внутри объекта применения. Для изменения скорости вращения поворотной стабилизированной платформы 2 вокруг вертикальной оси, оператор через панель управления 17 передает на блок управления 18 сигнал об уменьшении или увеличении скорости вращения, а блок управления 18 вырабатывает сигналы управления двигателем 5 горизонтального направления, принимает и обрабатывает сигналы датчика угла поворота 7 горизонтального направления. При этом линия визирования стабилизирована.
В устройстве приемном 13 закреплен тепловизионный объектив 19, матричное фотоприемное устройство 20, блок обработки сигналов 21, модуль 22 обработки и преобразования данных. Тепловизионный объектив 19 включает общий для трех оптических полей зрения блок линз 23 и сменные блоки линз 24, 25, вводимые в оптическую систему узкого поля зрения для формирования двух дополнительных оптических полей зрения: сменный блок линз 24 вместе с оптической системой узкого поля зрения формирует широкое поле зрения, сменный блок линз 25 вместе с оптической системой узкого поля зрения формирует обзорное поле зрения. Фокальная плоскость тепловизионного объектива 19 совмещена с чувствительными площадками матричного фотоприемного устройства 20, и оптическое изображение местности преобразовывается в электрические сигналы, принимаемые блоком обработки сигналов 21, который преобразует их в видеосигналы и передает на модуль 22 обработки и преобразования данных.
На фиг. 2 изображен тепловизионный объектив 19 на входе, которого расположен общий для трех оптических полей зрения блок линз 23 и фокусирующая линза 26, расположенная перед блоком линз 27, служащим для переноса изображения из фокальной плоскости тепловизионного объектива 19 на чувствительные площадки матричного фотоприемного устройства 20. Блок линз 23, фокусирующая линза 26, блок линз 27 образуют оптическую систему узкого поля зрения. Сменные блоки линз 24, 25 выведены из оптической схемы. Для смены полей зрения по команде оператора с панели управления 17 на блок управления 18 поступает сигнал о вводе в оптическую систему тепловизионного объектива 19 сменного блока 24 или сменного блока 25. Из блока управления 18 команда поступает на модуль 22 обработки и преобразования данных, который дает команду на включение двигателя 28 расположенного внутри тепловизионного объектива 19 для поочередного вбрасывания сменных блоков линз 24 или 25 до совмещения оптической оси одного из сменных блоков с оптической осью узкого поля зрения. При фокусировке тепловизионного объектива 19 на конечное расстояние оператор с помощью панели управления 17 через блок управления 18 подает сигнал на модуль 22 обработки и преобразования данных, который включает двигатель фокусировки 29, расположенный внутри тепловизионного объектива 19 и служащий для перемещения фокусирующей линзы 26. Фокусировка тепловизионного объектива 19 при изменении температуры окружающей среды и при наблюдении объекта на бесконечности производится автоматически по заложенной программе.
В подвесе 14 вертикального наведения, расположенном на поворотной стабилизированной платформе 2, закреплены датчик угла поворота 30 вертикального направления и двигатель 31 вертикального направления, выполняющий функции датчика момента и моментного двигателя разгрузки вертикального направления и обеспечивающий вращение устройства приемного 13 с закрепленным на нем тепловизионным объективом 19 вокруг горизонтальной оси. Внешние возмущающие моменты воспринимаются гироскопом 9 в виде противодействующего момента гироскопических сил и угла поворота гироскопа по оси прецессии, который посредством датчика угла поворота 30 вертикального направления преобразуется в управляющий сигнал системы разгрузки и поступает в модуль 12 управления двухосевым гироскопом 11, который формирует сигналы в модуль разгрузки 16 вертикального направления. Сигналы с модуля разгрузки 16 вертикального направления после преобразования поступают в виде сигналов управления на двигатель 31 вертикального направления, который развивает моменты разгрузки, равные по величине и противоположные по направлению возмущающим моментам, действующим вокруг горизонтальной оси при вращении поворотной стабилизированной платформы 2 вокруг вертикальной оси, и внешним возмущающим моментам, действующим вокруг горизонтальной оси при угловых и/или линейных перемещениях объекта применения. При уравновешивании моментов вокруг горизонтальной оси сохраняется стабилизированное положение линии визирования. Гироскоп 9, блок электронный 10, модуль 12 управления гироскопом 11, модуль разгрузки 16 вертикального направления, датчик угла поворота 30 вертикального направления, двигатель 31 вертикального направления образуют систему управления с обратной связью, в которой линия визирования сохраняет свое угловое положение неизменным. Модуль 22 обработки и преобразования данных формирует сигналы служебной информации: центральный знак, подвижный и неподвижный штрихи измерения дальности, цифровое значение дальности, информацию о режимах работы прибора панорамного, формирует узкое поле зрения с электронным увеличением, формирует аналоговый видеосигнал по ГОСТ 7845-92 (для черно-белого изображения) с наложенной служебной информацией и передает на блок управления 18, с которого по команде с панели управления 17 на видеосмотровое устройство 32, установленное внутри объекта применения, передается видеоизображение местности с наложенной служебной информацией одного из полей зрения тепловизионного объектива 19 или узкого поля зрения с электронным увеличением по выбору оператора. Центральный знак предназначен для наведения на цель, после чего производится передача целеуказания на вооружение по данным датчика угла поворота 7. Измерение дальности производится методом «база на цель»: наложением на нижнюю часть изображения цели неподвижного штриха и перемещением подвижного штриха до верхней части изображения. Высота цели в телевизионных строках сравнивается с данными о высоте цели в телевизионных строках на определенном расстоянии, введенными в модуль 22 обработки и преобразования данных, производится вычисление и дальность выводится в строке служебной информации на видеосмотровом устройстве 32.
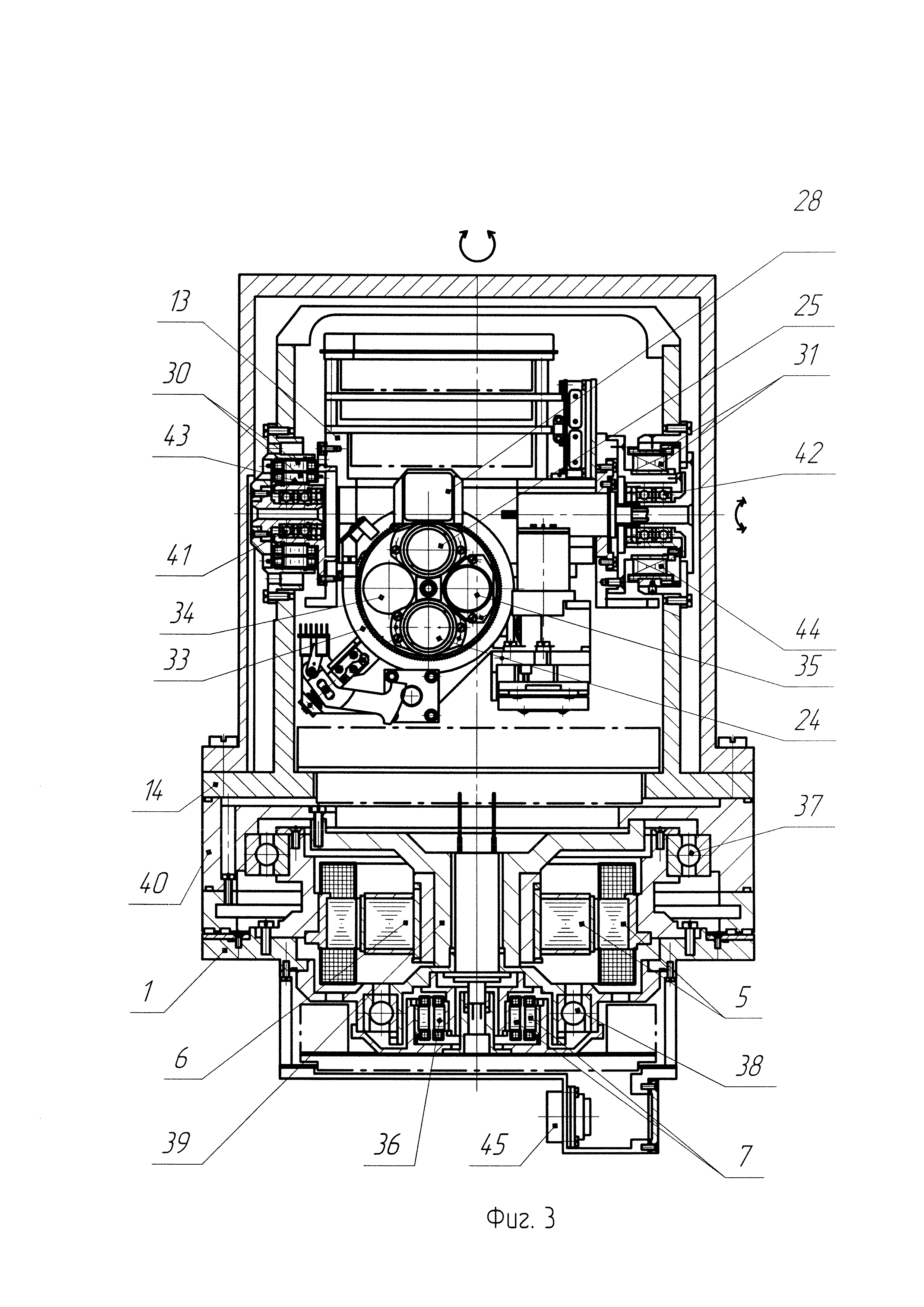
На фиг. 3 показано конструктивное исполнение механизма смены кратности и конструктивное исполнение поворотной стабилизированной платформы 2 прибора панорамного. Смена кратности происходит при повороте барабана 33 двигателем 28. В барабан 33 установлены сменные блоки линз 24 и 25. Отверстие 34 в барабане 33 служит для прохода светового потока от блока линз 23 при узком поле зрения. Для смены полей зрения по команде оператора двигатель 28 поворачивает барабан 33 и в оптическую систему узкого поля зрения объектива вводится поочередно сменные блоки линз 24 и 25, формирующие широкое поле зрения и обзорное поле зрения соответственно. При вводе сменных блоков линз 24 или 25 в оптическую систему узкого поля зрения меняется увеличение (кратность) тепловизионного объектива 19. В четвертом отверстии барабана 33 установлена калибровочная линза 35, при вводе которой в оптическую систему тепловизионного объектива 19 изображение местности в плоскости чувствительных элементов матричного фотоприемного устройства 20 преобразовывается в изображение однородного фона с одинаковой яркостью по всему полю зрения и с каждого чувствительного элемента на блок обработки сигналов 21 поступают электрические сигналы одинаковой величины, то есть происходит выравнивание (калибровка) уровней сигналов каждого элемента, что необходимо, для исключения, при проведении обзора пространства после вывода из оптической системы калибровочной линзы 35, наложения изображения одного участка местности на другой вследствие инерционности чувствительных площадок.
Поворотная стабилизированная платформа 2 прибора панорамного включает в себя подвес 14 вертикального наведения, вращающийся вместе с ротором 6 двигателя 5 горизонтального направления неподвижной монтажной платформы 1 и ротором 36 датчика угла поворота 7, вокруг вертикальной оси в подшипниках 37 и 38, и состоящий из обоймы 39 механически связанной с обоймой 40, к которой закреплен подвес 14 вертикального наведения. В подвесе 14 вертикального наведения в подшипниках 41 и 42 вокруг горизонтальной оси вместе с ротором 43 датчика угла поворота 30 вертикального направления и ротором 44 двигателя 31 вертикального направления вращается устройство приемное 13. Таким образом, двухплоскостную стабилизацию полей зрения (линии визирования) и наведение линии визирования обеспечивает поворотная стабилизированная платформа 2 с двумя степенями свободы: по оси вертикального наведения и по оси горизонтального наведения. Разъем 45 предназначен для электрической связи прибора панорамного с блоком управления 18.
Работает прибор панорамный следующим образом.
Оператор после включения прибора панорамного с панели управления 17 наблюдает за местностью по видеосмотровому устройству 32, начиная с обзорного поля зрения со сменным блоком линз 25 и, при необходимости, переключается на широкое поле зрения со сменным блоком линз 24 или на узкое поле зрения с общим блоком линз 23. Для более детального рассмотрения объектов оператор с панели управления 17 переключается на узкое поле зрения с электронным увеличением, которое формируется из узкого оптического поля зрения с двух кратным увеличением изображения. При непрерывном вращении вокруг вертикальной оси на двигатель 31 вертикального направления поступает сигнал на развитие момента, препятствующего прецессированию устройства приемного 13 вокруг горизонтальной оси и линия визирования сохраняет свое угловое положение относительно горизонта неизменным. Для обзора по вертикальному направлению на двигатель 31 по вертикальному направлению поступает управляющий сигнал о повороте устройства приемного 13 вокруг горизонтальной оси на необходимый угол, и линия визирования занимает новое положение относительно горизонта. Для наведения на цель с управляющей обмотки двигателя 5 горизонтального направления снимается напряжение, и линия визирования занимает положение около цели. Наведение на цель производится подачей напряжения на двигатель 31 вертикального направления для поворота устройства приемного 13 и смещения линии визирования по вертикали, при этом поворотная стабилизированная платформа 2 начинает прецессировать вокруг вертикальной оси и линия визирования будет смещаться по горизонту до совмещения с целью. После снятия сигнала управления линия визирования займет новое стабилизированное положение. В зависимости от положения цели относительно линии визирования возможна подача напряжения на двигатель 5 горизонтального направления и прецессировать будет устройство приемное 13 вокруг горизонтальной оси.
Таким образом создан прибор панорамный, работающий в инфракрасном диапазоне, обеспечивающий работу в четырех полях зрения: узком (3°х2,25°), широком (9°х6,73), обзорном (24°х18°), узком поле зрения с электронным увеличением (1,5°x1,12°), имеющий независимую двухосевую стабилизацию полей зрения по вертикальному и горизонтальному направлениям, с круговым обзором местности, как с постоянной, так и с переменной угловой скоростью одновременно по двум направлениям, в увеличении дальности обнаружения и распознавания цели в ночных условиях за счет применения тепловизионного объектива и четырех полей зрения;
Положительный эффект от предлагаемого технического решения заключается в возможности работы в четырех полях зрения: трех оптических - узком, широком и обзорном полях зрения, а также узком поле зрения с электронным увеличением; в обеспечении двухосевой стабилизации полей зрения (линии визирования); в увеличении дальности обнаружения и распознавания цели в ночных условиях за счет применения четырех полей зрения; в возможности измерения дальности до цели методом «база на цель» с выводом измеренной дальности в служебной строке на экране видеосмотрового устройства; в упрощении конструкции за счет исключения телевизионного объектива как в приборах аналогах, исключения входных плоских зеркал и их приводов с датчиками углов их разворота как в ближайшем аналоге, и в расширении функциональных свойств прибора панорамного за счет применения тепловизионного объектива с четырьмя полями зрения, обеспечивающего возможность круглосуточной работы в любых сложных условиях видимости, при пониженной прозрачности атмосферы, дымах, маскирующих завесах и пр., а также в полной темноте.
Реферат
Прибор панорамный выполнен в виде неподвижной монтажной платформы, на которой расположены датчик угла поворота горизонтального направления и двигатель горизонтального направления, обеспечивающий вращение вокруг вертикальной оси поворотной платформы с тепловизионным объективом, в фокальной плоскости которого установлено матричное фотоприемное устройство. В подвесе вертикального наведения, расположенном на поворотной платформе, закреплены датчик угла поворота вертикального направления и двигатель вертикального направления, обеспечивающий перемещение по вертикальному направлению тепловизионного объектива, выполненного единым для горизонтального и вертикального направлений и с двумя сменными линзовыми блоками, поочередно вбрасываемыми на оптическую ось. Поворотная стабилизированная платформа с двумя степенями свободы по осям вертикального и горизонтального наведения образована поворотной платформой с подвесом вертикального направления, датчиком угла поворота вертикального направления, двигателем вертикального направления, двухосевым гироскопом, установленным в подвесе вертикального направления вместе с датчиком угла поворота горизонтального направления и двигателем горизонтального направления неподвижной монтажной платформы. Технический результат – обеспечение кругового обзора как с постоянной, так и с переменной угловой скоростью, стабилизация по горизонтали и вертикали тепловизионного канала. 3 ил.
Комментарии