Система гидравлических клапанов - RU2277646C1
Код документа: RU2277646C1
Чертежи

Описание
Изобретение относится к системе гидравлических клапанов с системой рабочих соединений, содержащей первое рабочее соединение и второе рабочее соединение, соединяемые с гидравлическим потребителем системой снабжающих соединений, содержащей соединение давления и соединение с резервуаром, первой системой клапанов, перекрывающей соединение давления или соединяющей его управляемым образом с первым рабочим соединением или со вторым рабочим соединением, второй системой клапанов, перекрывающей соединение с резервуаром или соединяющей ее управляемым образом с первым рабочим соединением или со вторым рабочим соединением, и блоком управления, управляющим первой и второй системами клапанов.
Такое гидравлическое клапанное устройство известно из патента США 5568759. От рычага управления или джойстика поступает специальный сигнал на микропроцессор, приводящий в действие управляющие клапаны обоих клапанных систем, причем золотник указанных управляющих клапанов соединен пружинами с золотником соответствующей клапанной системы так, что происходит подпружиненное взаимодействие. Во многих случаях этот вариант выполнения предпочтителен, потому что поток через оба клапанных устройства проходит только в одном направлении и силы, действующие на элементы клапана, по существу, не зависят от направления действия гидравлического потребителя. Однако с помощью такого клапанного устройства трудно точно управлять потребителем, так как трение в механических частях, гистерезис в соленоидных клапанах и внешние силы, например силы, создаваемые потоком, не дают возможности точно позиционировать золотник.
Цель изобретения состоит в предложении простого метода точного управления потребителем.
С помощью системы клапанов, указанной во вводной части, эта цель достигнута за счет того, что предложена, по меньшей мере, одна система клапанов с датчиком степени открытия, связанная с блоком управления, который управляет системой клапанов в зависимости от сигнала датчика степени открытия и заданного сигнала.
С помощью датчика степени открытия блок управления может устанавливать количество жидкости, поступающей к потребителю или вытекающей из потребителя, в зависимости от того, расположен ли датчик степени открытия в первой или во второй системе клапанов. В зависимости от степени открытия перемещение или скорость перемещения и, соответственно, положение потребителя можно регулировать относительно точно.
Предпочтительно система клапанов имеет форму золотникового клапана, и датчик степени открытия выполнен в виде позиционного датчика, определяющего положение золотника. Таким образом, степень открытия больше не определяют напрямую. Так как, однако, определенная степень открытия соответствует каждому положению золотника, положение золотника позволяет косвенно определить степень открытия. Датчик Холла, дифференциальный преобразователь линейных перемещений (ДПЛП) или любой другой подходящий датчик может быть использован как позиционный датчик.
Полезно, что блок управления учитывает нелинейную корреляцию между положением золотника и степенью открытия системы клапанов. Такая корреляция представлена в памяти, например, как функция или таблица так, что блок управления может легко преобразовать положение золотника в степень открытия.
Предпочтительно блок управления связан, по меньшей мере, с одним устройством определения разности давлений, определяющим разность давлений в системе клапанов, снабженной датчиком степени открытия. Когда остальные характеристики системы клапанов известны, степень открытия и разность давлений позволяют определить расход жидкости. Однако расход гидравлической жидкости обуславливает скорость включения гидравлического потребителя, соединенного с рабочим соединением. В зависимости от того, какая система клапанов снабжена датчиком степени открытия и устройством определения разности давлений, вход (входные показания) или выход (выходные показания) можно точно контролировать.
Предпочтительно каждое рабочее соединение снабжено датчиком давления, причем каждый датчик давления соединен с блоком управления. Это предоставляет больше возможностей для управления. Гидравлическим потребителем можно управлять с помощью давления в рабочих соединениях.
Предпочтительно, чтобы датчики давления составляли часть устройства определения разности давлений. В данном контексте датчики давления имеют двойное назначение, а именно: определение разности давлений и определение абсолютного значения давления. Тогда блок управления определяет разность давлений с помощью третьего датчика давления.
Предпочтительно, что блок управления использует одну систему клапанов для управления потоком через рабочее соединение, а другую систему клапанов - для управления давлением в системе рабочих соединений. Таким образом, в зависимости от управляемой системы клапанов и расположения отдельных датчиков, может быть осуществлено управление расходом жидкости вместе с управлением входным давлением (управление потоком на выходе и управление давлением на входе) или управление расходом жидкости на входе вместе с управлением выходным давлением (управление потоком на входе и управление давлением на выходе). В обоих случаях скорость гидравлического потребителя может быть задана в широком диапазоне, независимо от управляющих нагрузок.
В первом варианте воплощения устройства, с помощью второй системы клапанов, блок управления регулирует выходной поток из одного рабочего соединения и с помощью первой системы клапанов регулирует давление как в одном рабочем соединении с положительной нагрузкой на потребителе, так и в другом рабочем соединении с отрицательной нагрузкой на потребителе. Таким образом, управление потоком на выходе и управление давлением на входе легко реализовать как при положительных, так и при отрицательных нагрузках. Отрицательные нагрузки означают нагрузки, действующие в направлении перемещения потребителя. Когда, например, потребитель - это гидроцилиндр с поршнем, опускающий поднятый груз, нагрузка действует в направлении перемещения потребителя, чтобы в этом случае регулировать давление в рабочем соединении, расход жидкости на выходе которого не подлежит регулировке. Здесь и далее под регулированием давления надо понимать то, что управляющее давление должно быть приведено в соответствие с заданным давлением. Разумеется, фактическое давление также может быть определено с помощью измерения в обоих рабочих соединениях.
В альтернативном варианте воплощения с помощью первой системы клапанов блок управления регулирует входной поток одного рабочего соединения, а с помощью второй системы клапанов - давление в этом же рабочем соединении. В этом случае регулирование количества втекающей жидкости можно осуществлять в сочетании с регулировкой давления на выходе. Эта схема управления работает одинаково как при положительных, так и при отрицательных нагрузках.
Предпочтительно, что третья система клапанов расположена между двумя рабочими соединениями и либо перекрывает, либо открывает связь между двумя рабочими соединениями. Открытие может быть полным или частичным. Наличие третьего клапанного устройства дает дополнительные преимущества. Когда, например, груз идет вниз, третья система клапанов открыта, и жидкость, текущая к рабочему соединению, связанному с увеличивающей свой объем рабочей камерой потребителя, больше не проходит через соединение давления. В противоположность этому, вытекающая из другого рабочего соединения жидкость может быть возвращена обратно, что позволяет экономить энергию.
Предпочтительно, что потребитель имеет различные потребности в жидкости от каждого соединения и что блок управления содержит устройство сопряжения, которое связывает включение третьей системы клапанов с включением первой или второй системы клапанов. Например, гидромеханизм в виде цилиндра с поршнем с односторонним выдвижением штока поршня имеет две камеры давления с разными поперечными сечениями. Камера давления, в которой расположен шток поршня, имеет меньшее поперечное сечение, чем камера давления без штока. Соответственно, при втягивании штока поршня в цилиндр из камеры давления без штока поршня вытекает больше жидкости, чем поступает в камеру давления со штоком. Избыточная жидкость может быть отведена через вторую систему клапанов. Однако когда груз идет вниз, происходит уменьшение камеры давления со штоком поршня, и в камеру давления без штока поршня должно быть подано большее количество жидкости. В этом случае начинает работать также первая система клапанов.
Предпочтительно можно установить плавающее положение, в котором третья система клапанов соединяет два рабочих соединения друг с другом, а вторая система клапанов соединяет одно из двух рабочих соединений с соединением с резервуаром. Во многих случаях необходимо одновременно соединить оба рабочих соединения с соединением с резервуаром для достижения свободной подвижности гидравлического потребителя. Это плавающее положение легко установить, как показано в материалах заявки.
Предпочтительно установлены только три датчика давления, из которых два определяют давление в рабочих соединениях, а один определяет давление либо в соединении давления, либо в соединении с резервуаром. Таким образом, достаточно относительно небольшого количества датчиков. Разумеется, в корпусе системы клапанов можно предусмотреть место для дополнительных датчиков. Это можно сделать с небольшими затратами. В зависимости от поставленной задачи (измерение на входе или измерение на выходе), могут быть установлены индивидуальные датчики давления.
Также предпочтительно установить только один датчик степени открытия, расположенный либо в первой, либо во второй системе клапанов. Здесь применимы те же условия, что и для датчиков давления. Чтобы повысить универсальность системы клапанов достаточно будет относительно небольшого количества датчиков, также при условии обеспечения для них дополнительного места.
Предпочтительно все рабочие соединения расположены на одной стенке корпуса, в котором установлена система клапанов. Это дает возможность разместить соединительные трубопроводы на той же стороне клапана. Таким образом, можно упростить конструкцию корпуса.
Изобретение подробно описано далее на основе предпочтительных вариантов воплощения, показанных на чертежах, на которых
на фиг.1 условно изображена гидравлическая система клапанов;
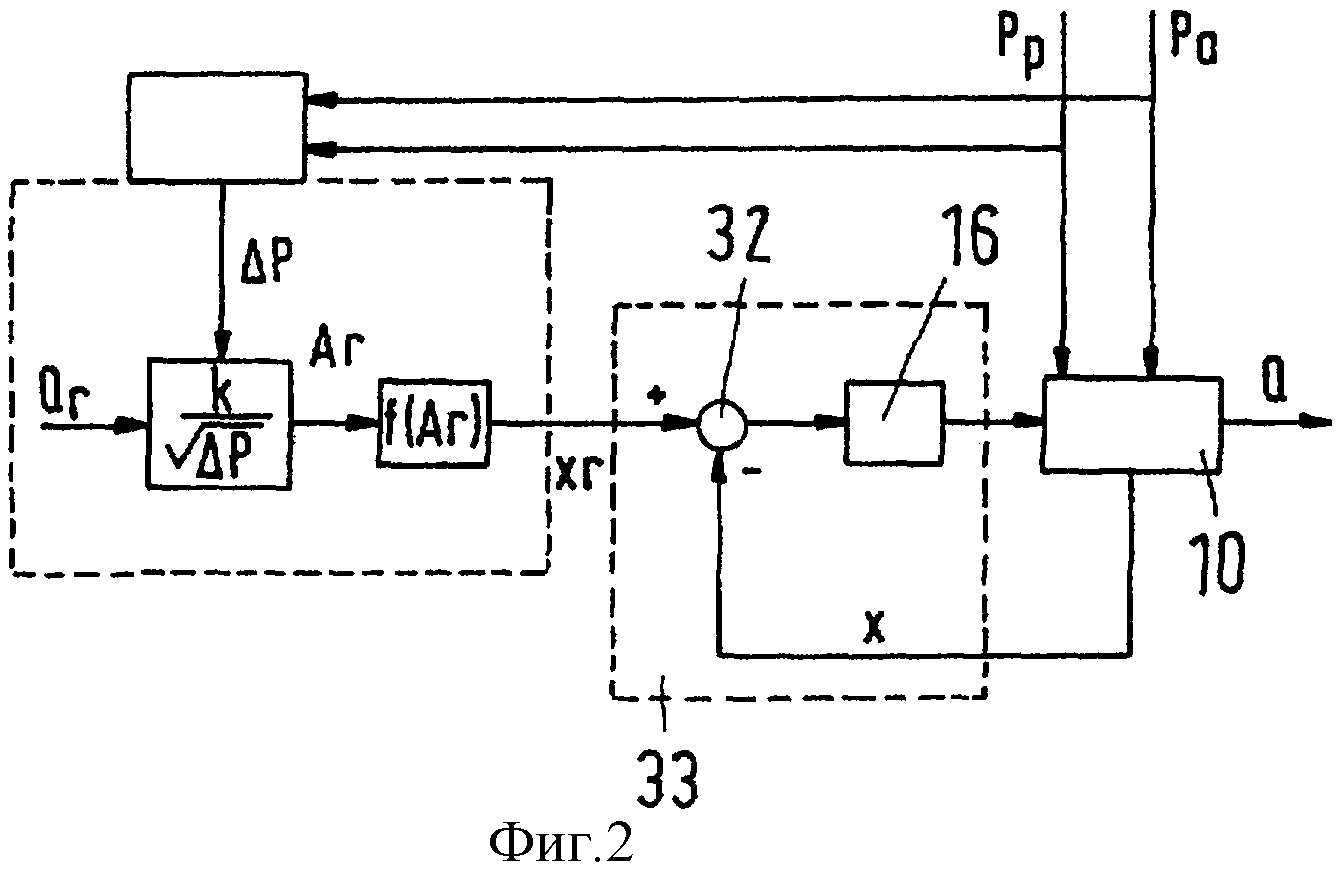
на фиг.2 условно изображено управление степенью открытия клапана;
на фиг.3 условно изображена конструкция системы клапанов.
Гидравлическая система 1 клапанов содержит два рабочих соединения А, В, соединенные с гидравлическим потребителем 2. В этом случае гидравлический потребитель 2 представляет собой цилиндр с поршнем, поднимающий груз 3. Например, цилиндр с поршнем устанавливают на тракторах, в подъемных устройствах плуга или других приспособлений.
Потребитель состоит из цилиндра 4 с расположенным в нем поршнем 5. С одной стороны поршень 5 соединен со штоком 6 поршня, воздействующим на груз 3. Соответственно, первая камера 7 давления имеет большее поперечное сечение, чем вторая камера 8 давления. Первая камера 7 давления соединена с рабочим соединением А. Вторая рабочая камера 8 соединена с рабочим соединением В.
Подача требуемого для управления потребителем давления происходит через соединение Р давления, которое может быть связано с насосом или другим источником давления, не показанным подробно. В месте соединения Р давления расположен датчик 9 давления, определяющий давление Рр, то есть давление в соединении давления.
На фиг.1 датчики давления показаны во всех местах, где они могут быть установлены в принципе. Однако, как будет показано ниже, датчики давления во всех представленных положениях для работы системы клапанов не обязательны. Однако целесообразно предусмотреть место для датчиков давления во всех этих положениях.
Через первую систему 10 клапанов соединение Р давления связано с двумя рабочими соединениями А, В. Первая система 10 клапанов выполнена в виде золотникового клапана с золотником 11, удерживаемым в нейтральном положении пружинами 12, 13, в этом положении соединение между соединением Р давления и двумя рабочими соединениями А, В разорвано. Когда золотник 11 смещается, первая система клапанов создает соединение либо между соединением Р давления и одним рабочим соединением А, либо между соединением Р давления и другим рабочим соединением В.
Позиционный датчик 14 определяет положение золотника 11. Так как положение золотника 11, в то же время, выражает степень или ширину открытия первой системы клапанов, позиционный датчик 14 также называют датчиком 14 степени открытия. Датчик 14 степени открытия вырабатывает сигнал х, подаваемый в блок 15 управления.
Первой системой 10 клапанов управляет управляющий клапан, то есть установлен управляющий клапан 16 с магнитным или иным приводом 17, управляемый блоком 15 управления. Управляющий клапан 16 подает давление от управляющего соединения Рс давления к первой передней стенке золотника 11 и соединяет вторую переднюю стенку золотника 11 с соединением Т с резервуаром. В этом случае перемещение золотника 11 происходит в одном направлении. Или управляющий клапан 16 соединяет вторую переднюю стенку с соединением Р давления и первую переднюю стенку - с соединением Т с резервуаром. В этом случае перемещение золотника 11 происходит в другом направлении. Когда управляющий клапан 16 занимает показанное нейтральное положение, золотник 11 также переходит в показанное нейтральное положение.
Поток через первую систему 10 клапанов, таким образом, будет всегда иметь одинаковое направление, независимо от того, какое из двух рабочих соединений А, В работает под давлением.
Вторая система 18 клапанов имеет аналогичную конструкцию, то есть она содержит золотник 19, удерживаемый в показанном нейтральном положении пружинами 20, 21. Вторая система 18 клапанов содержит позиционный датчик 22, который вырабатывает сигнал у, отражающий положение золотника 19 во второй системе 18 клапанов и тем самым степень открытия. Этот сигнал также поступает в блок 15 управления.
Когда золотник 19 смещен из своего нейтрального положения, вторая система 18 клапанов соединяет соединение Т с резервуаром либо с первым рабочим соединением А, либо со вторым рабочим соединением В. В показанном нейтральном положении золотника 19 соединение полностью перекрыто.
В соединении Т с резервуаром расположен датчик 23 давления, определяющий значение давления Pt и передающий его в блок 15 управления.
Аналогично, управляющий клапан управляет второй системой 18 клапанов, то есть установлен управляющий клапан 24, а блок 15 управления приводит в действие его магнитный или иной привод 25, смещающий золотник в процессе регулировки гидравлического давления.
В рабочем соединении А установлен датчик 30 давления, определяющий давление Ра. В рабочем соединении В установлен датчик 31 давления, определяющий давление Pb. Таким образом, датчики давления 30, 31 определяют давление в рабочих соединениях А, В соответственно и передают данные в блок 15 управления.
В изображенном клапанном устройстве возможны различные режимы работы. Требуемые датчики будут указаны ниже.
В принципе есть два способа управления системой клапанов 1. Для упрощения нижеследующего объяснения сделано допущение, что во второе рабочее соединение В жидкость поступает под давлением, а из первого рабочего соединения А жидкость течет обратно к соединению Т с резервуаром.
Первый способ - это регулирование потока вытекающей жидкости и давления в рабочем соединении В, в которое поступает жидкость. В данном случае скоростью перемещения потребителя 2, т.е. перемещением груза 3, можно управлять, управляя второй системой 18 клапанов. Первая система 10 клапанов регулирует уровень давления в потребителе 2.
В этом случае датчик 23 давления должен быть расположен в соединении Т с резервуаром. Этот датчик 23 давления позволяет блоку 15 управления, вместе с сигналом Ра давления от датчика 30 давления, определять разность давлений во второй системе 18 клапанов. Также используют позиционный датчик или датчик 22 степени открытия, позволяющий определить степень открытия второй системы 18 клапанов. Зная разность давлений во второй системе 18 клапанов и степень открытия, можно определить объемный расход из камеры 7 давления через первое рабочее соединение. Разумеется, в определении объемного расхода следовало бы принять во внимание дополнительные факторы, которые, однако, или неизменны или, по меньшей мере, известны для второй системы 18 клапанов.
Для этого "управления потоком на выходе" и "управления давлением на входе" необходимо только три датчика 23, 30, 31 давления и один позиционный датчик 22. Датчик 31 давления также нужен при обратном перемещении потребителя 2.
При положительной нагрузке от груза 3, то есть когда усилие от груза 3 действует в направлении, отличном от направления движения поршня 5, степень открытия первой системы 10 клапанов регулируют так, чтобы получить желательное давление в первом рабочем соединении А. Это желательное давление и/или желательную скорость груза 3 и, таким образом, желательный объемный расход задают блоку управления 15 через управляющие входы PS или VS соответственно, например, с помощью джойстика.
В качестве альтернативы, положение первой системы 10 клапанов или, скорее, положение золотника 11 также можно регулировать в зависимости от давлений Pa, Pb в двух рабочих соединениях А, В, когда заданы желательные значения давлений.
При отрицательных нагрузках, то есть когда усилие от груза 3 действует в том же направлении, что и движение поршня 5, степень открытия первой системы 10 клапанов, то есть положение золотника 11, устанавливают в зависимости от желательного уровня давления в рабочем соединении В и измеренного давления Pb во втором рабочем соединении В. В качестве альтернативы, положение золотника в первой системе 10 клапанов можно также регулировать на основе желательных уровней давления Ра, Pb в двух рабочих соединениях А, В и измеренных уровней давления.
В альтернативном режиме работы используют регулирование входа и регулирование выхода, то есть "управление потоком на входе" и "управление давлением на выходе". В этом случае первая система 10 клапанов регулирует скорость потребителя 2, а вторая система 18 клапанов регулирует уровень давления в потребителе.
В этом случае следует использовать датчик 9 давления в соединении Р давления и позиционный датчик 14 - в первой системе 10 клапанов. Датчик 23 давления и позиционный датчик 22 здесь не нужны.
Желаемое положение золотника 11 определяют на основе разности ΔР давлений между давлением Рр в соединении Р давления и давлением Ра в первом рабочем соединении А и желаемым значением объемного расхода Qr (фиг.2). В результате получают желаемое поперечное сечение Ar потока для первой системы 10 клапанов. Затем, с помощью коэффициента клапана, соответствующим образом зависящего от положения, это поперечное сечение потока преобразуют через функцию f(Ar) в сигнал xr положения, подаваемый к точке 32 суммирования, представляющей собой часть контроллера 33. Точка 32 суммирования соединена с управляющим клапаном 16, который воздействует на первую систему 10 клапанов для изменения положения золотника 11 в случае, когда фактическое положение х золотника 11 не соответствует заданному положению xr. Для простоты дополнительные элементы контроллера, например усилители и т.п., не показаны. В конечном итоге, достигают такого положения, в котором объемный расход Q через первую систему 10 клапанов соответствует заданному объемному расходу Qr. Так как этот объемный расход Q, в то же время, содержит информацию о скорости перемещения поршня 5 потребителя 2, можно с помощью интегрирования объемного расхода Q или зависящей от него величины относительно точно определить положение поршня 5 потребителя 2 и, следовательно, положение груза 3.
Как при положительных, так и при отрицательных нагрузках вторую систему 18 клапанов используют для того, чтобы значение давления во втором рабочем соединении В соответствовало заданному значению давления.
В обоих режимах работы нужен только позиционный датчик 14, 22 в той системе клапанов, в которой определяют разность ΔР давлений.
Между двумя рабочими соединениями А, В расположена третья система 26 клапанов с перемещаемым непосредственно с помощью электромагнитного привода 28 золотником 27. В показанном на чертеже положении покоя, устанавливаемым с помощью пружины 29, третья система 26 клапанов разрывает связь между двумя рабочими соединениями А, В или, когда золотник 27 переключен в положение, не показанное здесь, соединяет два рабочих соединения А, В.
Эту третью систему 26 клапанов устанавливают по усмотрению, т.е. в ней нет необходимости. Однако ее наличие дает преимущества, описанные ниже.
Для отрицательной нагрузки может быть реализована функция регенерации. Когда, например, груз 3 опускают (это соответствует перемещению справа налево на фиг.1), жидкость, вытекающая из камеры 7 давления, может быть вновь подана в камеру 8 давления. Так как камера 8 давления увеличивает свой объем не в той мере, в какой уменьшает свой объем камера 7 давления, возникает избыток жидкости, выпускаемый через систему 18 клапанов. При противоположных условиях, то есть отрицательной нагрузке, камера 7 давления увеличивает свой объем быстрее, чем камера 8 давления, и подача жидкости, соответственно, будет происходить через первую систему 10 клапанов. Таким образом, с потребителем, имеющим существенно отличающиеся контактные поверхности давления, блок 15 управления всегда управляет третьей системой 26 клапанов вместе или с первой системой 10 клапанов, или со второй системой 18 клапанов.
В первом случае, то есть при управлении системой 18 клапанов позиционный датчик 22 и датчик 30 давления целесообразно использовать совместно с датчиком 23 давления.
Когда камера 7 давления увеличивает свой объем быстрее, чем уменьшает свой объем камера 8 давления, первая система 10 клапанов будет задействована вместе с третьей системой 26 клапанов. В этом случае будут использованы позиционный датчик 14, датчик 30 давления и датчик 9 давления.
Во многих случаях необходимо соединить оба рабочих соединения А, В с соединением Т с резервуаром одновременно для получения рабочих соединений А, В без давления. В данном случае это сделать относительно просто, путем соединения двух рабочих соединений А, В с помощью третьей системы 26 клапанов и, одновременно, двух рабочих соединений А, В с резервуаром Т с помощью второй системы 18 клапанов.
В частности, использование системы клапанов для трактора или другой сельскохозяйственной машины, может потребовать реализации наполовину плавающего положения. Такое положение, например, необходимо, когда трактор тянет плуг, обрабатывающий грунт на определенной рабочей глубине. В случае столкновения с камнем или другим препятствием плуг должен иметь возможность движения вверх без существенного сопротивления этому движению (разумеется, за исключением сил тяжести). После преодоления препятствия плуг должен иметь возможность возвращения на заданную рабочую глубину.
В данном случае это довольно просто реализовать. Снова сделано допущение, что давление в рабочем соединении А служит цели подъема груза 3, в данном случае - плуга. Здесь вторую систему 18 клапанов используют в качестве клапана, управляющего давлением. Когда давление Pb во втором рабочем соединении В из-за выталкивания плуга из земли препятствием превышает некоторое предельное значение, вторая система 18 клапанов создает соединение между вторым рабочим соединением В и соединением Т с резервуаром для отвода жидкости из второй камеры 8 давления. С помощью первой системы 10 клапанов жидкость в объеме, требуемом для подъема груза 3, подают в первую камеру 7 давления. В этом случае блок 15 управления определяет степень открытия и длительность поддержания этой степени открытия первой системы 10 клапанов, а также разность давлений ΔР в первой системе 10 клапанов. Таким образом, блок 15 управления может относительно точно определить изменение положения груза 3.
Когда давление Pb во втором рабочем соединении В вновь станет ниже предельного значения, поршень 5 снова переместится в противоположном направлении, чтобы опустить груз 3. В этом случае жидкость поступает из соединения Р давления через первую систему 10 клапанов. Из первой камеры 7 давления жидкость уходит через вторую систему 18 клапанов. В этом случае блок 15 управления теперь просто должен перевести систему 10 клапанов вперед, то есть удерживать золотник 11 в противоположном направлении в течение того же времени, что и прежде, когда груз 3 был поднят. Такой рабочий режим относительно просто реализовать. При достижении желаемого положения груза 3 движение будет остановлено. Разумеется, можно также использовать позиционный датчик.
Таким образом, потребитель 2 может постоянно удерживать груз в определенном положении в отсутствие внешних сил, поднимающих груз 3.
На фиг.3 условно изображена механическая конструкция такой системы 1 клапанов. Одни и те же элементы имеют те же номера позиций, что и на фиг.1.
В корпусе 34 золотники 11 и 19 расположены параллельно друг другу. Два рабочих соединения А, В расположены на одной передней стенке 35 корпуса 34, что упрощает монтаж соединительных труб.
С помощью описанного клапанного устройства и показанных режимов работы получены следующие преимущества: топологическая схема клапанов основана на независимо управляемых, раздельно контролируемых отверстиях, реализованных с помощью первой системы 10 клапанов или второй системы 18 клапанов. Таким образом, скорость работы потребителя 2 и уровень давления, при котором он работает, могут быть установлены, по существу, независимо друг от друга.
В простом режиме работы нужен только один позиционный датчик. Только когда третью систему 26 клапанов используют в плавающем или наполовину плавающем режиме, может иметь смысл установить два позиционных датчика.
Система клапанов позволяет легко установить наполовину плавающий режим, то есть допустить перемещение груза 3 под действием внешних сил только в одном направлении, тогда как перемещение в другом направлении заблокировано. Обычно это возможно только с гидроцилиндрами одностороннего действия, традиционно используемыми в держателях навесного оборудования тракторов. При использовании цилиндра двустороннего действия, как в данном случае, держатели могут выполнять дополнительные функции, например подъем трактора.
Третья система 26 клапанов позволяет легко управлять отрицательными нагрузками, не требуя дополнительного количества масла из соединения Р с насосом.
Реферат
Система предназначена для гидравлических приводов различных машин и механизмов. Система гидравлических клапанов с системой рабочих соединений содержит первое рабочее соединение и второе рабочее соединение, причем оба рабочих соединения соединены с гидравлическим потребителем, системой снабжающих соединений, содержащей соединение с источником давления и соединение с резервуаром. А также система снабжена первой системой клапанов, перекрывающей соединение с источником давления или соединяющей его управляемым образом с первым рабочим соединением или вторым рабочим соединением, второй системой клапанов, перекрывающей соединение с резервуаром или соединяющей его управляемым образом с первым рабочим соединением или вторым рабочим соединением, и блоком управления, управляющим первой системой клапанов и второй системой клапанов. При этом, по меньшей мере, одна система клапанов снабжена датчиком степени открытия, соединенным с блоком управления, управляющим системой клапанов в зависимости от сигнала датчика степени открытия и заданного сигнала. Технический результат - повышение точного управления потребителем. 15 з.п.ф-лы, 3 ил.

Комментарии