Позиционный пневматический привод - RU2689662C1
Код документа: RU2689662C1
Чертежи


Описание
Изобретение относится к области машиностроения. Реализуется позиционным пневмоприводом и может быть использовано для многокоординатных перемещений исполнительных механизмов машин.
Наиболее близкий аналог - позиционный пневматический привод, (см. патент RU № 2450174 C2, F15B11/12, F15B11/076, опубл. 10.05.2012), включающее двигатель с исполнительным механизмом, регулятор потока, шарико-винтовую передачу, взаимодействующую по типу обратной связи с вращающимся распределителем, отличающийся тем, что в приводе применены пневматический двигатель с пневмораспределителем и жестко связанный с ним гидравлический тормоз, управляемый гидросистемой, оснащенной гидрораспределителем, гидроаккумулятором и регулятором потока, установленным на слив, а вращающийся распределитель снабжен пневмораспределителем.
Однако привод имеет следующие недостатки:
1) Ограничение максимальной скорости привода суммарными силами сопротивления движению гидроцилиндра до 0.5 м/с.
2) Использование гидравлической подсистемы влечет за собой загрязнение рабочей зоны вблизи оборудования и снижение экологичности привода.
3) Управление торможением с помощью регулирования параметров рабочей жидкости, что ограничивает качество управления позиционированием, точность которого во многом определяется объемными потерями в уплотнениях гидроцилиндра и сжимаемостью жидкости при динамических режимах работы.
Задача изобретения – повышение быстродействия и точности позиционирования привода и надежная фиксация исполнительного механизма после остановки.
Сущность изобретения заключается в том, что позиционный пневматический привод, включающий пневматический двигатель и пневмораспределители при этом включает адаптивную систему управления, образуемую инверсным пневмомеханическим тормозным устройством, многофункциональным пневматическим датчиком с программируемым логическим контроллером.
Технический результат:
Интеллектуальная система управления позволяет адаптировать привод к изменению скорости поршня и нагрузки на шток силового цилиндра, на ходу меняя координату переключения управления на остановку, что сокращает область рассеивания выбега и повышает точность в 1,17 раз.
Повышено быстродействие привода в 1,22 раза за счет отсутствия гидравлической подсистемы, что позволяет более быстрый разгон и большую скорость перемещения поршня, а высокая интенсивность торможения с помощью инверсного пневмомеханического тормоза способствует меньшему времени торможения. Интенсивность торможения обеспечивается пружинным замыканием, что является наиболее быстрым способом остановки.
Тормозные цилиндры с пружиной в бесштоковой полости позволяют фиксировать шток силового цилиндра, не допуская опускание груза под собственным весом или осевые колебания штока при внешних воздействиях.
Объединение силового и информационного сигнала обеспечивает наименьшее время от подачи команды на остановку до начала торможения привода.
Привод, в отличии от аналога, имеет обратную связь по перемещению, нагрузке, скорости, ускорению, что позволяет наделить систему способностью диагностики.
Технический результат достигается:
• Наделением привода свойством адаптации к изменяющимся нагрузкам
• Установкой внешнего тормозного устройства – инверсного пневмомеханического тормоза.
Сущность изобретения поясняется чертежами, где на
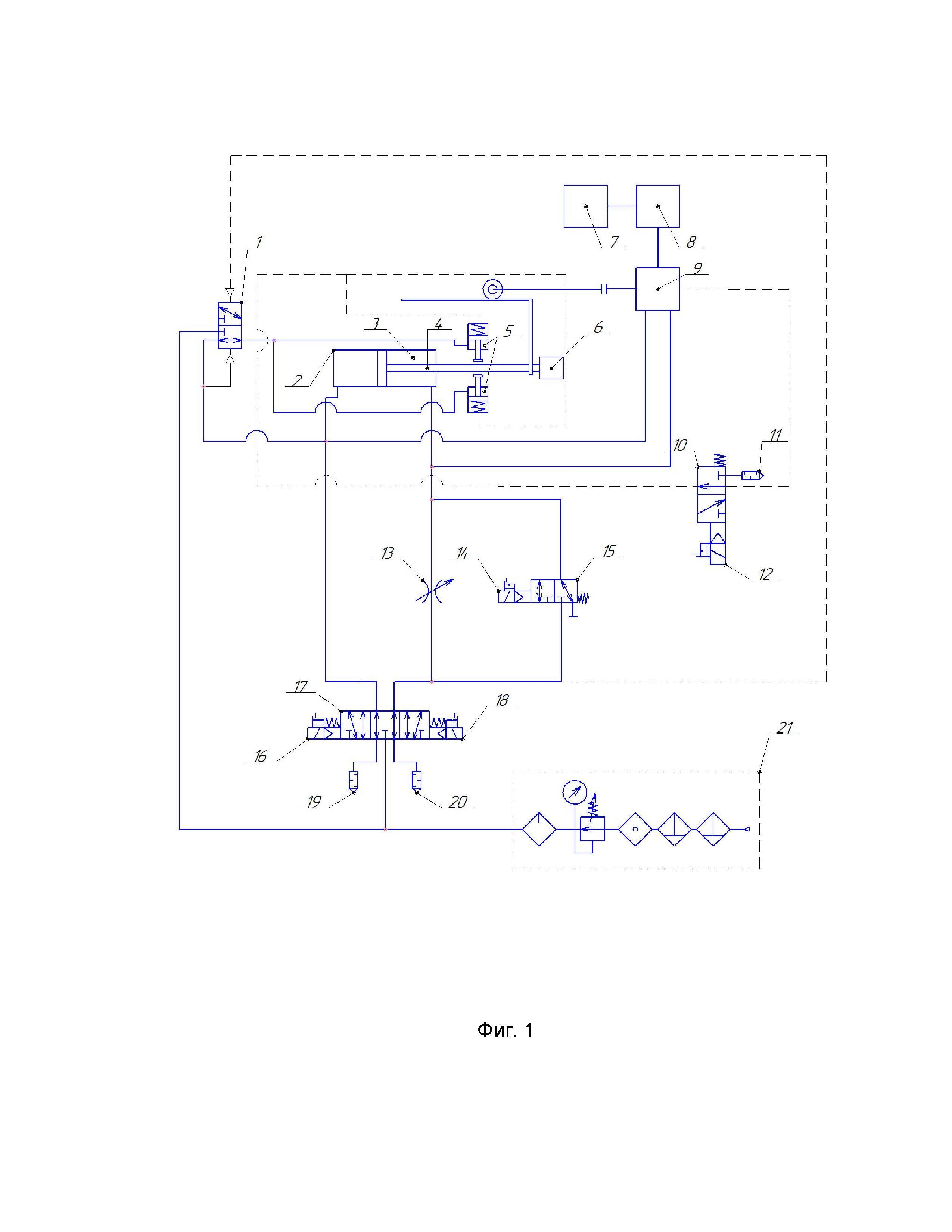
фиг. 1 - Принципиальная схема позиционного пневматического привода;
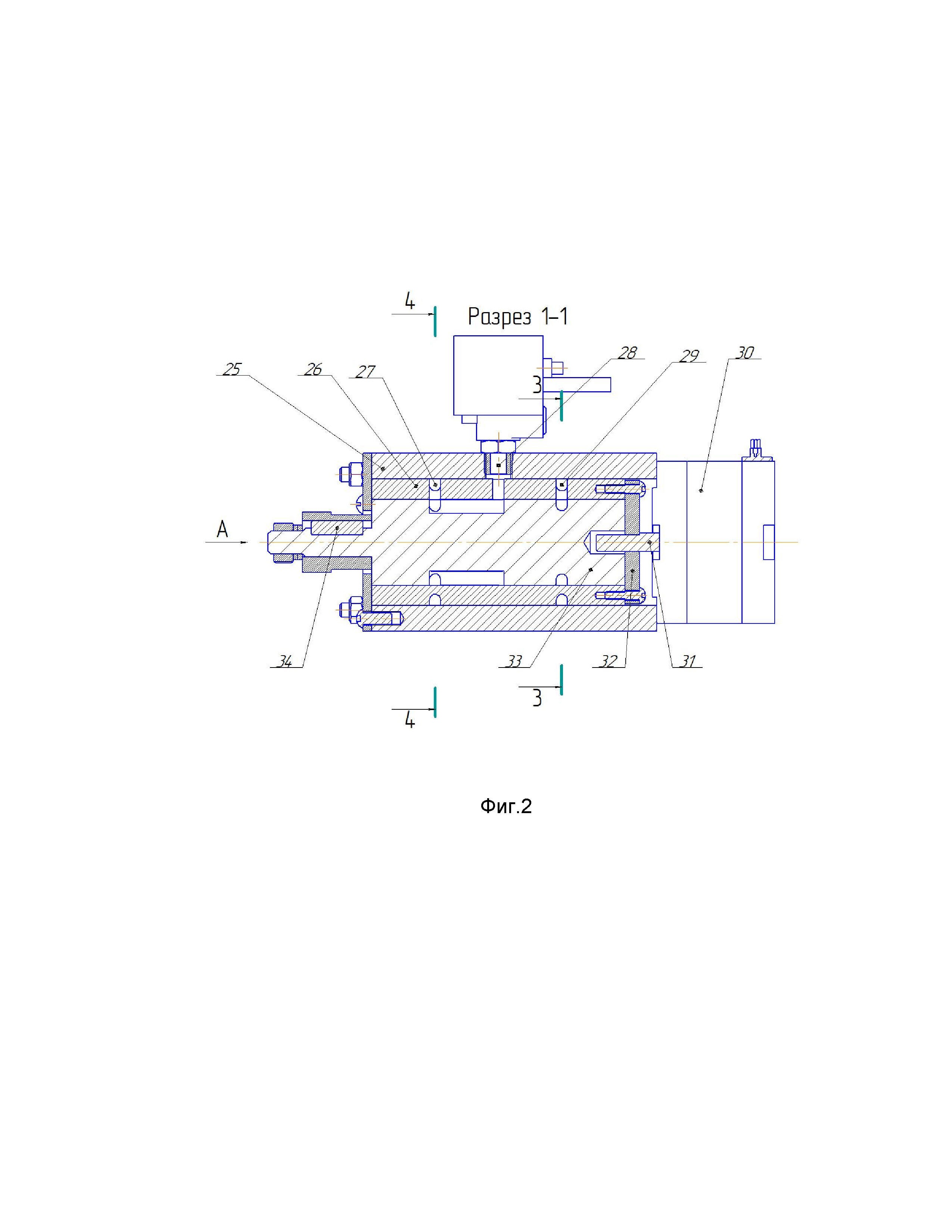
фиг. 2 - Сборочный чертеж многофункционального пневматического датчика (МПД 9);
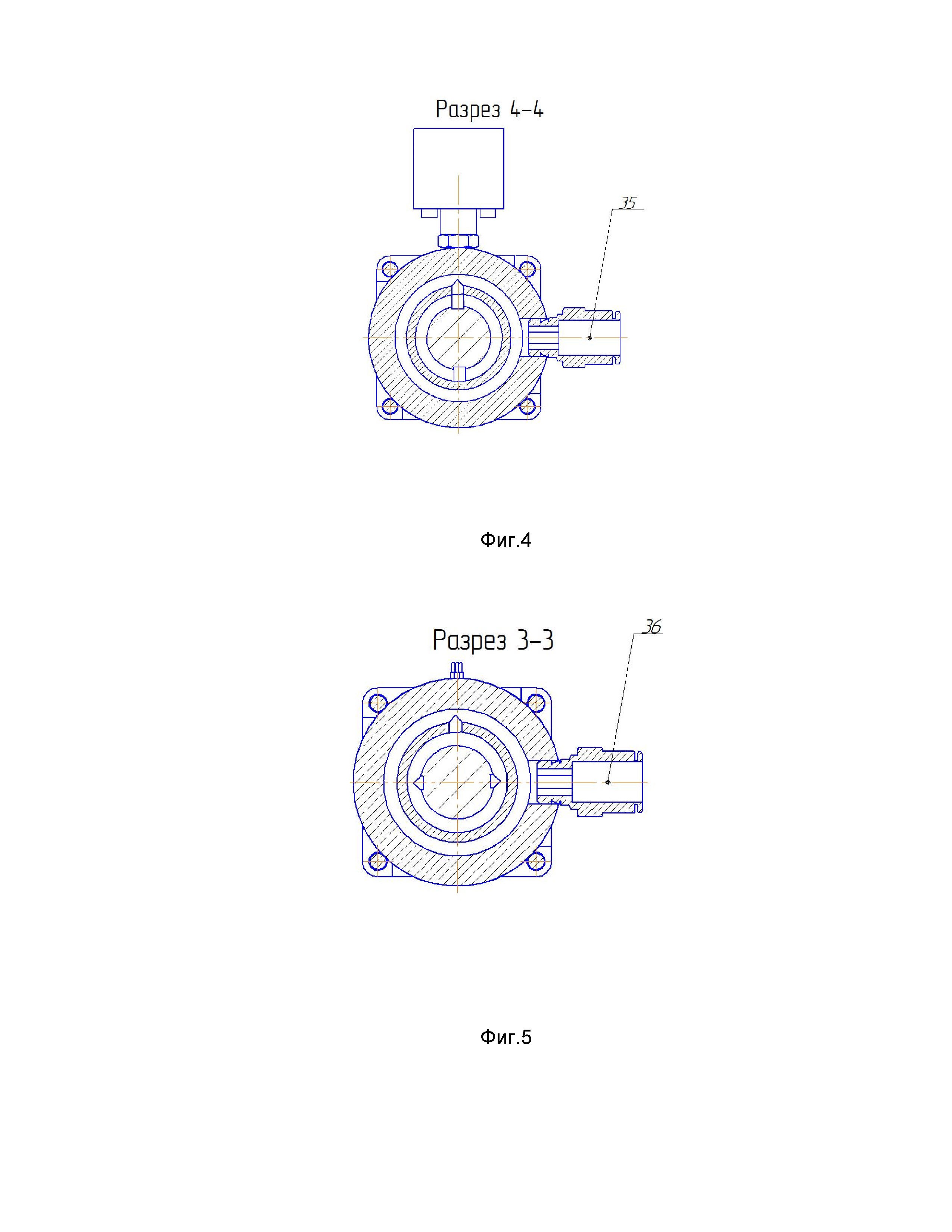
фиг.3 - Вид спереди многофункционального пневматического датчика 9; фиг. 4 – Разрез 4-4 многофункционального пневматического датчика 9;
фиг. 5 – Разрез 3-3 многофункционального пневматического датчика 9;
фиг. 6 – Осциллограмма изменения давления на выходе датчика 23.
Позиционный пневматический привод состоит из распределителя разжима тормоза 1; пневматического двигателя 2; штоковой полости 3 пневмодвигателя 2; штока 4 пневмодвигателя 2; инверсного пневмомеханического тормоза 5, установленного на двигатель 2; исполнительного механизма 6, соединенного с пневматическим двигателем 2; устройства ввода 7, задающего координату перемещения пневмодвигателя 2, на программируемый логический контроллер 8; управляющего приводом многофункционального пневматического датчика 9, полости которого соединены с полостями пневмодвигателя 2; пневматического распределителя тормозной системы 10, через который подходит воздух к инверсному пневмомеханическому тормозу 5; глушителя тормозных цилиндров 11, установленного на пневматическом распределителе тормозной системы 10; электромагнита управления подачей воздуха 12, распределителя 10; дросселя 13, с помощью которого происходит замедление хода пневмодвигателя 2; электромагнита переключения на режим замедления 14, установленного на распределителе перехода на режим замедления 15; который связан пневматической магистралью с пневмодвигателем 2; электромагнита подачи сигнала 16 на выдвижение штока 4 пневматического двигателя 2, который установлен на распределитель управления 17; электромагнита подачи сигнала 18 на втягивание штока 4; глушителей силового цилиндра 19 и 20, установленных на распределителе управления 17 пневмодвигателем 2; блока подготовки воздуха 21, который очищает воздух при подаче в систему; передней крышки 22, фиксируемой к корпусу 25 установленного на пневмодвигателе 2; и датчика давления 23, установленного на корпусе 25; шестерни 24, соединенной через шпонку 34 с внутренней втулкой 33; внешней втулки 26, установленной в корпус 25; напорной полости 27, связанной с поршневой полостью пневмодвигателя 2; полости 28, соединенной с датчиком давления 23; сливной полости 29, соединенной со штоковой полостью 3 пневматического двигателя 2; шагового двигателя 30, установленного на корпусе 25; вала шагового двигателя 31; задней крышки 32, объединяющей шаговый двигатель 30 и внешнюю втулку 26; внутренней втулки 33, соединенной с помощью шестерни 24 рейки с пневмодвигателем 2, шпонки 34, фиксирующей шестерню 24; фитинга напорной полости 35; фитинга сливной полости 36, через которые соединяется с помощью пневмолиний многофункционального пневматического датчика (МПД) 8 с двигателем 2.
Устройство работает следующим образом:
Через устройство ввода 7 на программируемый логический контроллер 8 задается координата перемещения привода в миллиметрах. Контроллер 8 переводит координату в число электрических импульсов и угол поворота внешней втулки 26.
Электрический импульс - это сигнал, определяемый программируемым логическим контроллером 8 при помощи датчика давления 23, появляющийся при резком изменении значения давления, которому способствует переменное соединение полости датчика давления 28 с напорной полостью 27 и со сливной полостью 29 пневматического двигателя 2. Угол поворота внешней втулки 26 –это значение, определяющее точную установку координаты перемещения привода.
После ввода координаты перемещения, внешняя втулка 26 поворачивается валом 31 шагового двигателя 30. Подается команда на включение электромагнита подачи сигнала на выдвижение штока пневматического двигателя 16, электромагнита переключения на режим замедления 14 и электромагнита управления тормозными цилиндрами 12.
Газ поступает от блока подготовки воздуха 21 через распределитель управления 17 в бесштоковую полость пневмодвигателя 2 и через распределитель 1 в штоковые полости цилиндров инверсного пневмомеханического тормоза 5. Тормоз постепенно разжимается. Привод начинает плавное движение. Воздух из штоковой полости 3 пневматического двигателя 2 через дроссель 13, распределитель перехода на режим замедления 15 и распределитель управления пневмодвигателем 17 поступает в атмосферу. Шток 4 пневмодвигателя 2 начинает выдвижение в режиме быстрого хода, вращая внутреннюю втулку 33, через шестерню 24 – рейку (рейка жестко привязана к штоку 4 пневмодвигателя 2). При смещении на угол поворота (до начала движения пневмодвигателя 2) внешней втулки 26 происходит совпадение отверстий внешней 26 и внутренней 33 втулок. Датчик давления 23 фиксирует быстрое повышение амплитуды давления и посылает сигнал на программируемый логический контроллер 8, который фиксирует этот скачек давления, сохраняя в памяти счетчика как первый импульс и записывая его значение. При повороте внутренней втулки 33 на 90̊, привод фиксирует второй импульс, записывая его порядковый номер и значение. Во время движения пневмодвигателя 2, программируемый логический контроллер 8 с помощью многофункционального пневматического датчика 9 считает количество импульсов, определяя координату перемещения. Вычисляет частоту импульсов, определяя скорость. Находит нагрузку на валу пневмодвигателя 2, фиксируя давления в полостях пневматического двигателя 2. При подходе к координате остановки снимается сигнал с электромагнита переключения на режим замедления 14. Газ из штоковой полости 3 пневматического двигателя 2 через дроссель 13 и распределитель управления 17 пневмодвигателем 2 соединяется с атмосферой. Привод переходит в режим замедления. На пониженной скорости происходит корректировка координаты совмещения отверстий внешней 26 и внутренней 33 втулок в зависимости от значения скорости движения поршня, нагрузке на штоке 4 и давлению в напорной полости пневмодвигателя 2. Корректировка на ходу угла «b» поворота внешней втулки 26 определяется по формуле (2), которая получается из уравнения баланса энергии (1).









Где,
m - масса тела, кг;
F1 – сила газа, действующая на поршень в напорной полости, Н;
F2 – сила газа, противодействующая поршню в выхлопной полости, Н;
Fтр – сила трения поршня, Н;
Fтор – сила торможения поршня, Н;
x – перемещение поршня, м;
v – cкорость поршня, м/с;
a – ускорение поршня, м/с2;
S1 – площадь поршня, м2;
S2 – площадь поршня минус площадь штока, м2;
S3 –площадь тормозного поршня, м2;



µ2 – коэффициент трения тормозных колодок о шток силового цилиндра;
p1 – давление в напорной полости цилиндра, Па;
р2 – давление в выхлопной полости цилиндра, Па;
g – ускорение свободного падения = 9.8 м/с2;
L – выбег поршня при торможении (тормозной путь), м;
b – угол поворота внешней втулки при корректировке на ходу с учетом выбега цилиндра,°;
d – диаметр внутренней втулки 31, м;
π – 3, 14
В итоге:

На «ползущей» скорости при подаче предпоследнего импульса перед конечным, снимается сигнал с электромагнита управления подачей воздуха 12. Время, за которое контроллер примет импульс, обработает его, отправит сигнал на переключение пневматического распределителя тормозной системы 10, отверстия многофункционального пневматического датчика 9 разойдутся и необходимое для торможения количество газа не поступит в бесштоковые полости инверсного пневмомеханического тормоза 5, до тех пор, пока не произойдет конечное совмещение отверстий втулок внешней 26 и внутренней 33. После соединения напорной полости пневматического двигателя 2 и бесштоковых полостей инверсного пневмомеханического тормоза 5, происходит сжатие штока 3 пневматического двигателя 2. Одновременно с этим при подаче конечного импульса снимается сигнал с электромагнита подачи сигнала 16 на выдвижение штока 4 пневматического двигателя 2. Тормозные цилиндры инверсного пневмомеханического тормоза 5 с помощью пружин фиксируют шток 4 пневматического двигателя 2. Привод останавливается в заданной координате. После выполнения рабочей операции, подается сигнал на электромагниты подачи сигнала 18, переключения на режим замедления 14 и управления подачей воздуха 12. Распределитель 1 переключается в первую позицию, подав воздух на разжатие инверсного пневмомеханического тормоза 5. Пневматический двигатель 2 совершает возврат в первоначальное положение. При обратном ходе поршня пневмодвигателя 2, шаговый двигатель повернет внешнюю втулку 26 обратно на такой же угол, на который элемент 26 повернулся в прямом направлении. Внешняя втулка 26 займет первоначальное положение, которое она занимала до начала цикла.
Описание работы системы распознавания импульсов
На Фиг. 6 изображен график, на котором показано изменение давления во времени, при движения штока 4 пневматического двигателя 2 и совмещения отверстий внешней 26 и внутренней 33 втулок. Участок А показывает неподвижное состояние поршня цилиндра пневматического двигателя -2 , В – повышение давления при соединении полостей напорной 27 и датчика давления 28, С – удержание давления на постоянном уровне при запирании полости 28 датчика давления, во время вращения внутренней втулки 33, D – участок понижения давления при совмещении полости датчика давления 28 и сливной полости 29, E – запирание полости и удержание давления. Таким образом программируемый логический контроллер 8 с помощью датчика давления 23 будет определять резкое изменение значение давления, как на участках В и D, и фиксировать импульс.
Реферат
Привод предназначен для многокоординатных перемещений исполнительных механизмов машин. Привод включает пневматический двигатель, пневмораспределители и адаптивную систему управления, образуемую инверсным пневмомеханическим тормозным устройством, многофункциональным пневматическим датчиком с программируемым логическим контроллером. Технический результат заключается в повышении быстродействия и точности позиционирования привода и надежной фиксации исполнительного механизма после остановки. 6 ил.
Комментарии