Способ и устройство для управления гидравлически активируемым приводным узлом арматуры (варианты) - RU2731353C2
Код документа: RU2731353C2
Чертежи







Описание
У гидравлически активируемых приводов трубопроводной арматуры, напр., на судах, которые плавают из арктических областей в субтропические области, вследствие изменения температуры окружающей среды, составляющего часто свыше 100°C, изменяется вязкость гидравлической жидкости, так что вследствие изменения вязкости также происходит изменение времени, в течение которого арматура перемещается гидравлически активируемым приводным узлом, напр., из открытого в закрытое положение.
При низких температурах и, следовательно, высокой вязкости арматура часто не может передвигаться или, соответственно, переставляться достаточно быстро, в то время как при более высоких температурах и низкой вязкости арматура часто перемещается слишком быстро, так что в трубопроводе, в котором встроена эта арматура, могут возникать толчки давления, так называемые гидравлические удары.
Но на практике важным является по существу неизменное время перестановки, в частности у судовой арматуры, которая должна работать при очень сильно отличающихся температурах окружающей среды.
Задачей изобретения является выполнить управление гидравлически активируемыми приводными узлами, в частности арматуры, так, чтобы независимо от изменяющихся температур окружающей среды при перестановке арматуры соблюдалось по существу всегда одинаковое время перестановки. Эта задача или, соответственно, поставленная проблема в соответствии с изобретением решается с помощью способа по п.1 формулы изобретения, а также с помощью устройств с признаками пп.9, 10 и 11 формулы изобретения.
Эта задача в соответствии с изобретением решается, в частности, таким образом, что по меньшей мере на части пути перестановки приводного узла определяется скорость перестановки и сравнивается с заданной, сохраненной в электронной памяти скоростью перестановки, после чего в случае возникновения разности между заданным значением и фактическим значением управление приводным узлом корректируется так, чтобы приводной узел проходил путь перестановки за заданное время перестановки. В соответствии с изобретением скорость перестановки может определяться непосредственно с помощью соответствующих сенсоров или опосредствованно. Последнее может осуществляться, например, путем измерения пути и времени.
Если приводной узел на измеренной части пути перестановки движется слишком быстро, то скорость перестановки для дальнейшего пути перестановки может снижаться, напр., путем периодического останова приводного узла, в то время как при слишком медленном движении перестановки приводного узла скорость перестановки на остальном пути перестановки повышается, напр., путем усиленного понижения давления гидравлической жидкости на подпружиненный поршень данного приводного узла, чтобы достичь заданного времени перестановки на всем заданном пути перестановки.
Таким образом арматура могла бы переставляться независимо от температуры окружающей среды и вместе с тем независимо от текущей вязкости при всегда одинаковом времени перестановки. При этом становится возможной более прецизионное управление такой арматурой даже в экстремальных условиях окружающей среды.
В соответствии с изобретением на отдельном участке пути перестановки приводного узла регистрируется время перестановки и по полученному таким образом значению скорости рассчитывается, сколько времени требуется приводному узлу для совершения всего пути перестановки, так чтобы на базе одного результата измерения уже могло рассчитываться все время перестановки.
Предпочтительно скорость перестановки измеряется в начале пути перестановки, исходя из конечного положения. Но можно также измерять скорость в пределах пути перестановки на отдельном участке пути, который начинается с некоторого промежуточного положения поршня приводного узла.
Преимуществом предлагаемой изобретением промежуточной регистрации времени по сравнению с измерением температуры для определения скорости привода приводного узла является то, что при промежуточной регистрации времени осуществляется непосредственная регистрация времени перестановки в мгновенной рабочей точке. Путем измерения температуры влияние вязкости гидравлической жидкости на время перестановки могло бы определяться только опосредствованно, так что должны были бы проводиться серии измерений при разных температурах и значения закладываться в программный код устройства управления. Кроме того, при измерении температуры не регистрировались бы другие влияния на время перестановки, такие как, например, различные гидравлические потери.
Изобретение касается способа по п.1 формулы изобретения для управления гидравлически активируемым приводным узлом, в частности для арматуры, при этом по меньшей мере на части пути перестановки приводного узла определяется скорость (v') перестановки и сравнивается с заданной скоростью (v) перестановки, после чего в случае разности между фактическим значением (v') и заданным значением (v) скорости управление приводным узлом (1-3) изменяется таким образом, что скорость (v') перестановки приводного узла приводится к заданному значению (v).
По одному из предпочтительных вариантов осуществления изобретения скорость (v') перестановки определяется путем комбинирования измерения пути и регистрации времени пути перестановки по меньшей мере в двух точках измерения. Так, например, в двух точках переключения регистрируются соответственно участок пути и время, так что по ним простым образом может рассчитываться скорость перестановки известного пути перестановки арматуры. Так прецизионное измерение и управление возможно при низких технических издержках при обозримых затратах.
По одному из предпочтительных вариантов осуществления изобретения скорость (v') перестановки приводного узла измеряется на отдельном участке (S1-S3) пути и используется в качестве основы для расчета времени перестановки на остальном пути перестановки.
По другому предпочтительному варианту осуществления изобретения скорость (v') перестановки измеряется в начале пути перестановки, исходя из конечного положения (S1) на отдельном участке (S1-S3) пути.
По другому предпочтительному варианту осуществления изобретения скорость (v') перестановки приводного узла определяется непрерывно и сравнивается с заданной скоростью (v) перестановки, после чего при возникновении разности между заданным значением и фактическим значением управление приводом непрерывно изменяется так, чтобы соблюдалось заданное время перестановки.
По другому предпочтительному варианту осуществления изобретения у приводного узла, имеющего подпружиненный поршень, осуществляется управление воздействующим на поршень гидравлическим давлением путем изменения проточного поперечного сечения в отводящем трубопроводе.
По другому предпочтительному варианту осуществления изобретения у приводного узла, имеющего поршень, подвергающийся воздействию гидравлической жидкости с двух сторон, осуществляется управление гидравлическим давлением путем изменения проточного поперечного сечения в проводящем гидравлическом трубопроводе.
По другому предпочтительному варианту осуществления изобретения у электрогидравлического привода управление приводным узлом осуществляется путем изменения частоты вращения двигателя или включения и выключения двигателя (M).
Также изобретение касается устройства для управления гидравлически активируемым приводным узлом, в частности арматуры, включающим в себя находящийся под воздействием пружины поршень в гидравлическом цилиндре, гидравлический насос для подачи давления на подпружиненный поршень через подводящий трубопровод, и по меньшей мере один управляющий клапан в отводящем трубопроводе для открытия и закрытия отводящего трубопровода, при этом управление поперечным сечением отводящего трубопровода может осуществляться с помощью блока управления, соединенного с вычислительным устройством, в котором фактическое значение скорости (v') поршня сравнивается с заданной скоростью (v) перестановки, и которое подает управляющий сигнал блоку управления.
Также изобретение касается устройства для управления гидравлически активируемым приводным узлом, в частности арматуры, включающим в себя поршень, с двух сторон подвергающийся воздействию гидравлической жидкости в гидравлическом цилиндре, гидравлический насос для подачи давления на поршень, управляющий клапан для переключения гидравлических трубопроводов, ведущих к гидравлическому цилиндру, между подводящим и отводящим трубопроводом, и расположенный в подводящем трубопроводе между источником давления и управляющим клапаном дроссель, обводимый байпасным трубопроводом, в котором расположен клапан для открытия и закрытия байпасного трубопровода, при этом управление проточным поперечным сечением подводящего трубопровода может осуществляться с помощью блока управления, соединенного с вычислительным устройством, в котором фактическое значение скорости (v') поршня сравнивается с заданной скоростью (v) перестановки, и которое подает управляющий сигнал блоку управления.
Также изобретение касается устройства для управления гидравлически активируемым приводным узлом, в частности арматуры, включающим в себя приводимый в действие приводным двигателем (M) гидравлический насос для подачи на поршень приводного узла гидравлической жидкости, при этом управление приводным двигателем (M) может осуществляться с помощью блока управления, соединенного с вычислительным устройством, в котором фактическое значение скорости (v') поршня сравнивается с заданной скоростью (v) перестановки, и которое подает управляющий сигнал блоку управления для синхронизированной работы двигателя (M) или для изменения частоты вращения двигателя (M).
По одному из предпочтительных вариантов осуществления устройства для определения скорости перестановки приводного узла на по меньшей мере одном отдельном участке пути перестановки предусмотрены переключатели в положениях (S1-S4) в функции пути.
По другому предпочтительному варианту осуществления устройства путь перестановки приводного узла определяется с помощью потенциометра.
Далее изобретение поясняется подробнее на примерах с помощью чертежа. Показано:
фиг.1: схематичный вид управления приводного узла, имеющего подпружиненный поршень для не изображенной арматуры;
фиг.2: на графике определение и корректировка времени перестановки у приводного узла, работающего слишком быстро;
фиг.3: график соответственно фиг.2 у приводного узла, работающего слишком медленно;
фиг.4: схематичное изображение устройства управления, имеющего блок управления;
фиг.5: вид соответственно фиг.1 приводного узла, имеющего поршень, подвергающийся воздействию гидравлической жидкости с двух сторон, и
фиг.6+7: графики соответственно фиг.2 и 3 управления приводным узлом с фиг.5, и
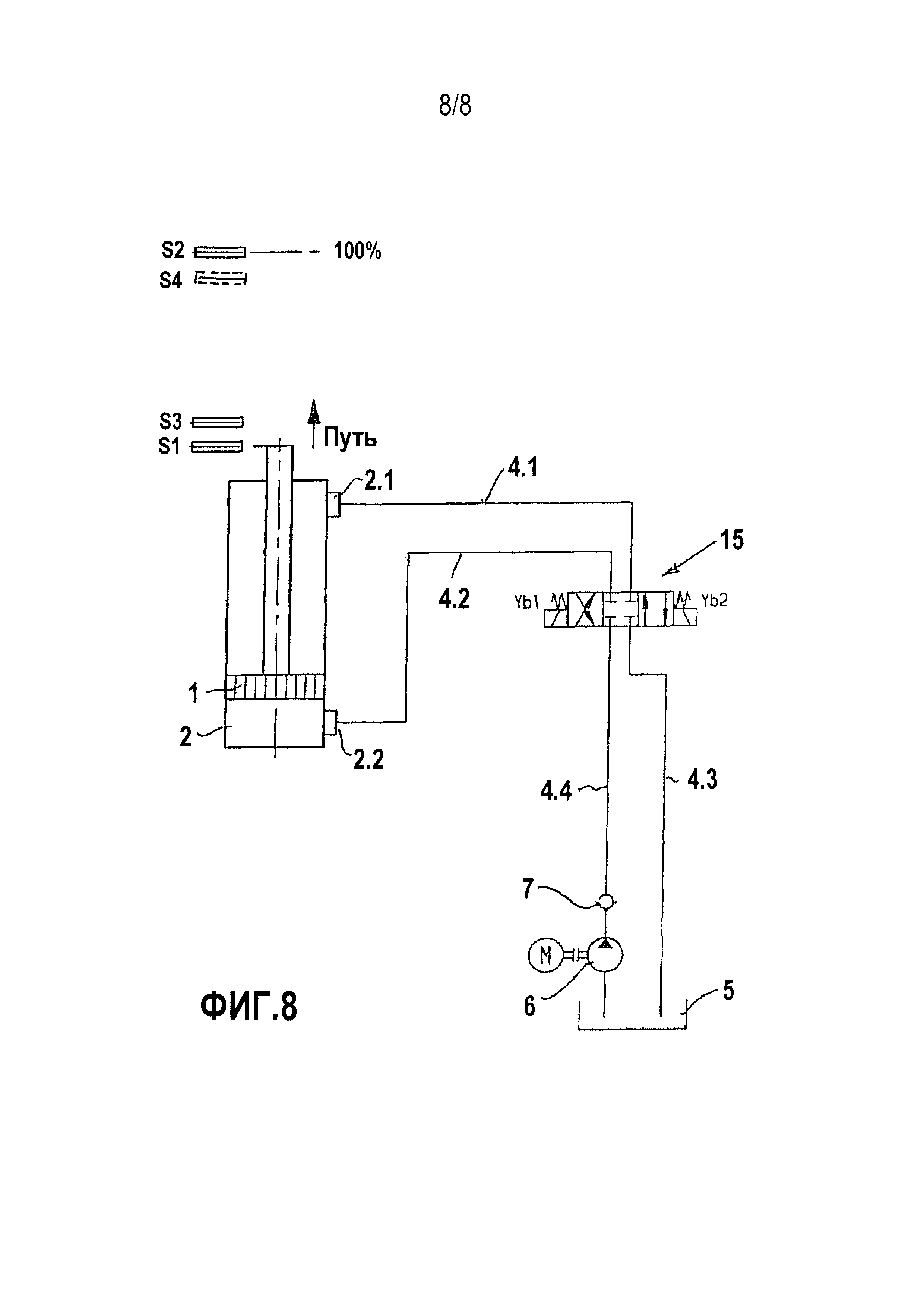
фиг.8: другой вариант осуществления.
На фиг.1 показан поршень 1 в цилиндре 2, при этом с одной стороны поршень подвергается воздействию пружины 3, а на противоположной стороне поршня 1 давление гидравлической жидкости подается к патрубку 2.1, который удерживает поршень 1 против силы пружины 3 в установленном положении. Путем изменения давления гидравлической жидкости поршень 1 переставляется против силы пружины 3 или пружиной 3.
Подвергающийся воздействию пружины 3 поршень 1 в цилиндре 2 образует в этом примере осуществления приводной узел, который переставляет не изображенную арматуру, например заслонку, в трубопроводе.
Проходимый поршнем 1 путь перестановки в изображенном примере осуществления на фиг.1 проходит от положения S1 до положения S2, при этом положение S2 соответствует 100% пути перестановки, начинающемуся от положения S1. От положения S1 до положения S3 указан отдельный участок пути перестановки, положение S1 соответствует, напр., открытому положению арматуры, а положение S2 - закрытому положению.
В цилиндр 2 через подводящий трубопровод 4a и 4b из резервуара 5 с помощью насоса 6, приводимого в действие двигателем M, подается гидравлическая жидкость. Обратный клапан в участке 4a трубопровода обозначен 7.
Воспроизведены управляющие клапаны 8 и 9 в проходящем к резервуару 5 отводящем трубопроводе 10 по параллельной схеме. Перед каждым управляющим клапаном включен дроссель 8.1 и 9.1, который может предусматриваться опционально.
В изображенном положении включения в подводящем трубопроводе 4b поддерживается повышаемое насосом 6 давление, потому что оба управляющих клапана 8 и 9 закрыты, и обратный клапан 7 препятствует обратному течению. Путем переключения одного из двух управляющих клапанов или обоих клапанов может освобождаться проточное поперечное сечение от подводящего трубопровода 4b к резервуару 5 через отводящий трубопровод 10, так что давление в подводящем трубопроводе 4b понижается, и поршень 1 может переставляться пружиной 3 в обозначенном стрелкой направлении перестановки.
Управляющие клапаны 8 и 9 изображены в виде электрически управляемых двухходовых клапанов. Можно также предусмотреть другую конструкцию клапанов, чтобы управлять описанным ниже управлением приводного узла из элементов 1-3.
В изображенном примере осуществления поршень 1 движется в направлении стрелки пружиной 3, как только давление гидравлической жидкости снижается путем открытия одного из управляющих клапанов 8 или 9.
На фиг.2 на графике показан путь перестановки поршня 1 в зависимости от времени t перестановки, при этом штриховой линией воспроизведена теоретически идеальная заданная скорость v перестановки, с которой поршень 1 совершает заданный путь перестановки из положения S1 в положение S2 за заданное время t=100% перестановки.
Заданное время перестановки задается, в частности, с учетом вида арматуры, приводимой в действие приводным узлом, и управляемой этой арматурой текучей среды, напр., заслонки в трубопроводе, которая поворачивается поршнем 1 приводного узла в пределах заданного угла вращения вследствие вращения зубчатого колеса посредством смещаемой поршнем зубчатой рейки.
В качестве примера на фиг.2 после заданной единицы времени ta или, соответственно, после пройденной части sa пути перестановки из положения S1 в положение S3, предпочтительно исходя из конечного положения в положение S1, в начале пути перестановки измеряется скорость поршня 1, после чего измеренная скорость v' поршня сравнивается с сохраненной в блоке памяти заданной скоростью v и констатируется, что привод работает слишком быстро или, соответственно, поршень 1 движется слишком быстро, потому что, например, вследствие высоких температур окружающей среды вязкость гидравлической жидкости низкая. Чтобы скорректировать этот слишком быстрый режим работы приводного узла, например, управляющий клапан 8 и/или 9 при достижении положения S3 закрывается, при этом привод в течение заданного времени останавливается в положении S3, как показано горизонтальным прохождением скорости v' поршня.
После определенного вычислительным устройством времени остановки один из управляющих клапанов 8, 9 снова открывается, так что поршень 1 на следующем отдельном участке пути движется силой пружины 3, после чего повторяется цикличное управление приводным узлом соответственно шагам, заданным вычислительным устройством, как воспроизведено ступенчатой линией скорости v' поршня на фиг.2. При этом время остановки может изменяться от одной ступени к другой. Также время перестановки может изменяться, в зависимости от результата расчета в вычислительном устройстве, на длине отельного участка пути перестановки, в частности, когда осуществляется дальнейший контроль скорости поршня на следующем промежуточном участке пути.
На фиг.3 показано управление приводного узла у привода, работающего слишком медленно. В этом примере результат измерения времени ta перестановки при достижении поршнем 1 положения S3 пути перестановки после сравнения с теоретически идеальной скоростью v показывает слишком медленную работу привода. Путем усиленного понижения давления гидравлической жидкости в подводящем трубопроводе 4b вследствие соответственного увеличения проточного поперечного сечения при открытии обоих управляющих клапанов 8 и 9 при высокой вязкости гидравлической жидкости может быстрее понижаться давление в цилиндре 2, так что в единицу времени возможно прохождение поршнем 1 большего пути перестановки, как показывает более крутая после ta линия скорости v' поршня на фиг.3.
В изображенном на фиг.2 и 3 примере осуществления управление приводным узлом путем цикличного открытия и закрытия одного или обоих управляющих клапанов 8, 9 осуществляется таким образом, что для заданного пути перестановки соблюдается заданное время перестановки, при этом измеряется скорость v' поршня на отдельном участке пути и сравнивается с заданным значением v, после чего в случае разности между фактическим значением и заданным значением управление приводным узлом изменяется так, чтобы соблюдалось заданное время перестановки.
Вместо двух управляющих клапанов 8 и 9, которые служат для увеличения проточного поперечного сечения для гидравлической жидкости при понижении давления в цилиндре 2, может также предусматриваться один отельный управляющий клапан, посредством которого может устанавливаться большее или меньшее проточное поперечное сечение в отводящем трубопроводе 10.
Возможно также, чтобы управляющие клапаны 8 и 9 имели проточное поперечное сечение различного размера, так чтобы управление понижением давления на поршень 1 могло осуществляться различным образом, когда открывается один или другой управляющий клапан.
Регистрация времени перестановки может осуществляться, напр., с помощью трех переключателей в функции пути. По одному переключателю предусмотрено в конечном положении S1 и положении S2. Третий переключатель в положении S3 служит для определения времени перестановки из положения S1 в положение S3 как основы для расчета. Как только вычислительным устройством определена скорость v' поршня между положением S1 и положением S3, эта измеренная скорость поршня или, соответственно, перестановки может использоваться для расчета времени перестановки на остальном пути перестановки.
В изображенном примере осуществления предварительно установлено время t=100% перестановки приводного узла для низких температур, то есть высокой вязкости. Предварительная установка может также производиться при более высоких температурах. Чтобы при более высоких температурах достигалось неизменное время перестановки, при закрытии арматуры в направлении стрелки на фиг.2 третьим позиционным переключателем в положении S3 регистрируется время перестановки или, соответственно, скорость перестановки, вслед за чем после соответствующего расчета в вычислительном устройстве управляющие клапаны 8, 9 синхронизировано закрываются и открываются.
Для открытия арматуры путем смещения поршня 1 против силы пружины 3 может различным образом осуществляться управление повышением давления насосом 6 в цилиндре 2.
В примере осуществления в соответствии с фиг.1-3 управление приводным узлом осуществляется циклично только во время хода поршня в направлении стрелки на фиг.1.
Даже если поршень должен совершать ход в противоположном направлении, то есть против силы пружины 3, за заданное время перестановки, исходя из конечного положения S2, на небольшом расстоянии предусматривается обозначенный на фиг.1 штриховыми линиями позиционный переключатель в положении S4, с помощью которого определяется скорость v' перестановки поршня 1 в противоположном направлении.
Если скорость перестановки поршня 1 отличается от заданной скорости v перестановки, при повышенной частоте вращения приводного двигателя M насосом 6 может быстрее повышаться давление в цилиндре 2, чтобы быстрее смещать поршень 1 против силы пружины 3 в направлении конечного положения S1. Соответствующим образом при более низкой частоте вращения двигателя M или цикличном выключении двигателя M может достигаться более медленная перестановка поршня 1 в противоположном направлении.
Вместо определения скорости v' поршня или, соответственно, перестановки на отдельном участке пути перестановки (фиг.2 и 3) может также непрерывно регистрироваться скорость v' перестановки и непрерывно сравниваться с заданной скоростью v перестановки. При этом непрерывно задействуется предусмотренный для управления приводным узлом управляющий клапан (или при необходимости несколько управляющих клапанов), чтобы поддерживать скорость v' поршня ближе к теоретической заданной скорости v перестановки.
Например, в управляющем клапане 8 или 8 может быть предусмотрен бесступенчато переставляемый дроссель для бесступенчатого изменения поперечного сечения потока.
Альтернативное определение времени перестановки может осуществляться путем непрерывной регистрации пути на приводном узле, напр., посредством потенциометра, с помощью которого может записываться путь перестановки на всем участке пути перестановки от положения S1 до положения S2.
У электрогидравлического оборудования можно также соответственно синхронизировано управлять применяемым при этом электродвигателем M, который приводит в действие гидравлический насос 6, как это описывалось выше в связи с отводом поршня 1 назад в конечное положение S1 у приводного узла на фиг.1.
На фиг.4 схематично показано в качестве примера вычислительное устройство 11, имеющее память 12, в которой сохранена заданная для данной арматуры скорость v перестановки. С помощью сравнивающего устройства 13 измеряемая скорость v' перестановки сравнивается с заданной скоростью v перестановки, после чего в случае разности вычислительным устройством 11 определяется, как корректируется привод при слишком быстром режиме работы путем остановки движения поршня или, соответственно, при слишком медленной работе путем интенсификации понижения давления. Вычислительное устройство 11 подает управляющий сигнал блоку 14 управления, который соответственно управляет управляющими клапанами 8, 9.
В примере осуществления на фиг.1 в качестве приводного узла воспроизведен подпружиненный поршень 1 в цилиндре 2.
Предлагаемое изобретением синхронизированное управление равным образом возможно в случае поршня приводного узла, подвергающегося воздействию гидравлической жидкости с обеих сторон.
На фиг.5 на виде соответственно фиг.1 показан поршень 1 приводного узла, подвергающийся воздействию гидравлической жидкости с двух сторон. 2.1 и 2.2 обозначены патрубки гидравлических трубопроводов 4.1 и 4.2, управление которыми осуществляется одним общим управляющим клапаном 15. В изображенном положении включения управляющего клапана 15, который может быть выполнен в виде активируемого электромагнитом 4-ходового клапана, оба гидравлических трубопровода 4.1 и 4.2 заперты, так что поршень 1 удерживается в своем положении.
В схематично воспроизведенном положении Yb1 включения управляющего клапана 15 гидравлический трубопровод 4.2 соединен с участком 4.3 трубопровода, так что давление на нижней стороне поршня 1 понижается, и гидравлическая жидкость направляется в резервуар 5, в то время как участок 4.4 трубопровода, включающий в себя насос 6, соединяется с гидравлическим трубопроводом 4.1, так что находящаяся под давлением гидравлическая жидкость подается к патрубку 2.1.
В положении Yb2 включения управляющего клапана 15 участок 4.3 трубопровода соединен с гидравлическим трубопроводом 4.1, а участок 4.4 трубопровода - с трубопроводом 4.2, при этом направление стрелки воспроизводит направление течения гидравлической текучей среды.
В участке 4.4 трубопровода между управляющим клапаном 15 и резервуаром 5 расположен насос 6, имеющий обратный клапан 7. Позицией 16 обозначен гидроаккумулятор. Во время нормальной эксплуатации при повышении давления в цилиндре 2 давление от гидроаккумулятора 16 направляется к одному из патрубков 2.1 и 2.2, так что не при каждой подаче давления на поршень 1 должен работать насос 6.
После некоторого повышения давления в гидроаккумуляторе 16 насосом 6 снова повышается давление гидравлической жидкости в гидроаккумуляторе 16.
Кроме того, в этом участке 4.4 трубопровода расположен дроссель 17, обводимый байпасным трубопроводом 4.41, в котором расположен клапан 18, соответствующий по исполнению одному из клапанов 8 и 9 на фиг.1.
В изображенном положении включения клапана 18 байпасный трубопровод 4.41 закрыт, так что в случае переключения управляющего клапана 15 в одно из положений Yb1 или Yb2 давление гидравлической жидкости через дроссель попадает к цилиндру 2.
В положении Ya клапана 18 дроссель 17 обводится, так что гидравлическое давление гидроаккумулятора 16 через поперечное сечение трубопровода попадает непосредственно к цилиндру 2.
В моменты времени t,1 и t,0 клапан 18 в изображенном положении на фиг.5 закрыт (Ya=0), в то время как управляющий клапан 15 в момент времени t,1 находится в положении Yb2=1, а при t,0 в воспроизведенном на фиг.5 запертом положении (Yb2=0).
На фиг.6 показано соответственно фиг.2 прохождение скорости v' поршня 1, при этом ta указывает время до достижения положения S3 переключения в конце части sa пути перестановки между положением S1 и положением S3.
На фиг.7 показаны соответственно фиг.3 процессы переключения управляющего клапана 15 и 18 при слишком медленном приводе. В момент времени t,2 клапан 18 находится в открытом положении (Ya=1), в то время как управляющий клапан 15 находится в положении Yb1=1 переключения.
Другими словами, в случае слишком быстрого привода на фиг.6 на протяжении промежутка времени t,0 поддерживается воспроизведенное на фиг.5 состояние включения клапанов 15 и 18, в то время как на протяжении времени t,1 оба гидравлических трубопровода 4.1 и 4.2 находятся в положении Yb2 включения, так что давление через дроссель 17 направляется в гидравлический трубопровод 4.2.
Соответствующим образом в случае слишком медленного привода на фиг.7 дроссель в течение времени t,2 обводится, чтобы повысить давление на нижней стороне поршня 1, в то время как на протяжении промежутка времени t,1 клапан 18 закрывается, и осуществляется повышение давления через поперечное сечение потока дросселя 17.
В примере осуществления фиг.1, включающем в себя подпружиненный поршень 1, управление приводным узлом осуществляется синхронизировано с помощью клапанного управления в отводящем трубопроводе 10, в то время как в примере осуществления на фиг.5, включающем в себя поршень 1, испытывающий воздействие с двух сторон, предусматривается изменение проточного поперечного сечения в подводящем трубопроводе 4.4.
При этом управление ходом поршня осуществляется ступенчато только в направлении стрелки на фиг.1 и 5.
Когда ход поршня должен совершаться против указанного стрелкой на фиг.1 и 5 пути перестановки также за заданное время перестановки, исходя из конечного положения S2, на отдельном участке пути предусматривается другой переключатель в положении S4 для определения скорости поршня на обратном пути.
Как описано с помощью фиг.1, путем изменения подачи давления в подводящем трубопроводе может изменяться время перестановки поршня 1.
Вместо воспроизведенного клапанного управления, с одной стороны, в отводящем трубопроводе на фиг.1, и, с другой стороны, в подводящем трубопроводе на фиг.5, у электрогидравлического привода возможно синхронизированное управление двигателем M насоса 6 для соблюдения заданного времени перестановки поршня 1.
При этом у системы с фиг.5 гидроаккумулятор 16 и клапан 18, а также дроссель 17 могут отсутствовать, как это показано на фиг.8, при этом при синхронизированной работе насоса 6 на фиг.8 путем включения и выключения двигателя M возможно синхронизированное управление двумя путями хода поршня 1, в зависимости от положения управляющего клапана 15.
Вместо изображенного количества ступеней управления на фиг.2, 3 и фиг.6, 7 могут также предусматриваться меньшее или большее количество ступеней. Теоретически могла бы также предусматриваться только одна ступень остановки движения поршня или, соответственно, ускорения поршня для приведения времени перестановки поршня на всем пути перестановки к заданному времени перестановки.
На фигурах воспроизведены отдельные ступени синхронизированного управления приводным узлом через равные интервалы времени t. Но можно также установить на пути перестановки ступени различной длины для совершения всего пути перестановки за заданное время перестановки.
Описанная корректировка скорости перестановки приводного узла производится предпочтительно при каждой перестановке арматуры, так что скорость перестановки приводного узла всегда адаптируется к текущим условиям.
Корректировка времени перестановки гидравлически активируемого приводного узла может применяться и в других областях, отличающихся от активирования арматуры, в частности на судах. Например, синхронизировано управляемый в соответствии с изобретением приводной узел может также активировать рычажный механизм, который должен выполнять заданный путь перестановки за заданное время.
Реферат
Изобретение касается способа управления гидравлически активируемым приводным узлом (1-3), в частности для арматуры, при этом по меньшей мере на части пути перестановки приводного узла определяется скорость (v') перестановки и сравнивается с заданной скоростью (v) перестановки, после чего в случае разности между фактическим значением (v') и заданным значением (v) скорости управление приводным узлом (1-3) изменяется таким образом, что скорость (v') перестановки приводного узла приводится к заданному значению (v). Технический результат – неизменное время перестановки арматуры независимо от изменяющихся температур окружающей среды. 4 н. и 11 з.п. ф-лы, 8 ил.
Комментарии