Способ управления электрогидравлическим следящим приводом - RU2759191C1
Код документа: RU2759191C1
Чертежи
Описание
Изобретение относится к области объемного гидропривода, а именно к способам управления электрогидравлическими следящими приводами с машинно-дроссельным управлением, предназначенными для регулирования силового параметра (силы для гидроприводов поступательного движения или вращающего момента для гидроприводов поворотного и вращательного движения) на выходном звене гидродвигателя (штоке, плунжере или корпусе гидроцилиндра в гидроприводах поступательного движения либо валу или корпусе поворотного гидродвигателя или гидромотора соответственно в гидроприводах поворотного и вращательного движения), и может быть использовано в приводах соответствующего назначения всевозможных машин и агрегатов, в частности, в приводах стендов для натурных испытаний труб на долговечность внутренним давлением и/или поперечными силами, создающими изгибающий момент (см., например: Патент на изобретение №2691271 (RU). Стенд для испытаний труб внутренним давлением и на изгиб / В.В. Бодров, P.M. Багаутдинов, А.А. Батурин, Е.В. Талалушкин; опубл. в БИ 2019. №17).
Известен способ управления электрогидравлическим следящим приводом, содержащим регулируемый насос, выполненный с регулятором давления, гидрораспределитель с пропорциональным электрическим управлением, гидродвигатель и контроллер, в соответствии с которым задают потребное значение контролируемого параметра путем формирования посредством контроллера электрического входного сигнала и формируют посредством контроллера управляющий электрический сигнал на электрический вход гидрораспределителя для изменения площади проходного сечения его рабочих окон с целью обеспечения заданного закона изменения контролируемого параметра [1]. При использовании указанного способа управления гидроприводом подача насоса (при пренебрежении утечками и перетечками рабочей жидкости) равна расходу жидкости, поступающему к гидродвигателю, а давление в напорном канале насоса поддерживается практически постоянным на уровне настройки регулятора давления насоса вне зависимости от нагрузки (силового параметра) на выходном звене гидродвигателя. В результате имеют место потери мощности, которые тем больше, чем меньше нагрузка на выходном звене гидродвигателя, что является недостатком известного способа управления.
Наиболее близким к заявляемому техническому решению является принятый в качестве прототипа способ управления электрогидравлическим следящим приводом, содержащим регулируемый насос, выполненный с регулятором рабочего объема с пропорциональным электрическим управлением, гидрораспределитель с пропорциональным электрическим управлением, гидродвигатель и контроллер, в соответствии с которым задают потребное значение контролируемого параметра путем формирования посредством контроллера электрического входного сигнала, формируют посредством контроллера управляющий электрический сигнал на электрический вход гидрораспределителя для изменения площади проходного сечения его рабочих окон с целью обеспечения заданного закона изменения контролируемого параметра, вычисляют в контроллере с учетом текущего фактического значения силового параметра на выходном звене гидродвигателя требуемое значение давления в напорном канале насоса из условия поддержания гидравлических потерь в гидроприводе на установленном уровне, минимально необходимом для решения задач регулирования контролируемого параметра, и формируют посредством контроллера управляющий электрический сигнал на электрический вход регулятора рабочего объема насоса для изменения давления в напорном канале насоса в соответствии с вычисленным значением [2]. Согласно указанному способу управления давление в напорном канале насоса изменяют в соответствии с текущими фактическими изменениями силового параметра на выходном звене гидродвигателя (в частности, в соответствии с изменениями перепада давления в рабочих полостях гидродвигателя), при этом потери давления в гидроприводе (включая потери давления на рабочих окнах гидрораспределителя) вне зависимости от значения силового параметра (при изменении его в пределах рабочего диапазона) в идеале поддерживаются на установленном уровне, минимально необходимом для осуществления задач регулирования контролируемого параметра, благодаря чему обеспечивается повышенный коэффициент полезного действия электрогидравлического следящего привода. При незначительных потерях давления в гидролиниях по сравнению с потерями давления на рабочих окнах гидрораспределителя при рассматриваемом способе управления перепад давления на рабочих окнах гидрораспределителя поддерживается практически постоянным. При постоянном перепаде давления на рабочем окне гидрораспределителя расход рабочей жидкости, поступающей через него в гидродвигатель и, соответственно, скорость движения выходного звена гидродвигателя теоретически не зависят от изменений нагрузки на выходном звене гидродвигателя (при изменении нагрузки в определенных пределах) и определяются лишь текущим значением площади проходного сечения рабочего окна гидрораспределителя, которое в свою очередь определяется управляющим электрическим сигналом, поступающим со стороны контроллера на электрический вход гидрораспределителя.
Из-за неидеальности динамических характеристик всех элементов электрогидравлического следящего привода изменение контролируемого параметра всегда отстает по фазе от изменения входного электрического сигнала, а изменение давления в напорном канале насоса отстает по фазе от текущего изменения силового параметра на выходном звене гидродвигателя, в силу чего во время переходных процессов перепад давления на рабочих окнах гидрораспределителя изменяется.
В тех случаях, когда контролируемым параметром является силовой параметр на выходном звене гидродвигателя, указанное отставание по фазе изменения давления в напорном канале насоса от текущего изменения силового параметра на выходном звене гидродвигателя влечет за собой снижение быстродействия электрогидравлического следящего гидропривода по сравнению с его потенциально возможным быстродействием.
Технической задачей, решаемой изобретением, является создание способа управления электрогидравлическим следящим приводом, обеспечивающего повышение быстродействия последнего при использовании силового параметра на выходном звене гидродвигателя в качестве контролируемого параметра.
Для решения поставленной задачи в известном способе управления электрогидравлическим следящим приводом, содержащим регулируемый насос, выполненный с регулятором рабочего объема с пропорциональным электрическим управлением, гидрораспределитель с пропорциональным электрическим управлением, гидродвигатель и контроллер, в соответствии с которым задают потребное значение контролируемого параметра путем формирования посредством контроллера электрического входного сигнала, формируют посредством контроллера управляющий электрический сигнал на электрический вход гидрораспределителя для изменения площади проходного сечения его рабочих окон с целью обеспечения заданного закона изменения контролируемого параметра, вычисляют в контроллере с учетом текущего фактического значения силового параметра на выходном звене гидродвигателя требуемое значение давления в напорном канале насоса из условия поддержания гидравлических потерь в гидроприводе на установленном уровне, минимально необходимом для решения задач регулирования контролируемого параметра, и формируют посредством контроллера управляющий электрический сигнал на электрический вход регулятора рабочего объема насоса для изменения давления в напорном канале насоса в соответствии с вычисленным значением, согласно изобретению при использовании силового параметра на выходном звене гидродвигателя в качестве контролируемого параметра вычисление в контроллере требуемого значения давления в напорном канале насоса производят в функции текущего заданного значения силового параметра.
При использовании силового параметра на выходном звене гидродвигателя в качестве контролируемого параметра вычисление в контроллере требуемого значения давления в напорном канале насоса в функции текущего заданного значения силового параметра обеспечивает при прочих равных условиях повышение быстродействия гидропривода, благодаря осуществлению опережающего изменения давления в напорном канале насоса.
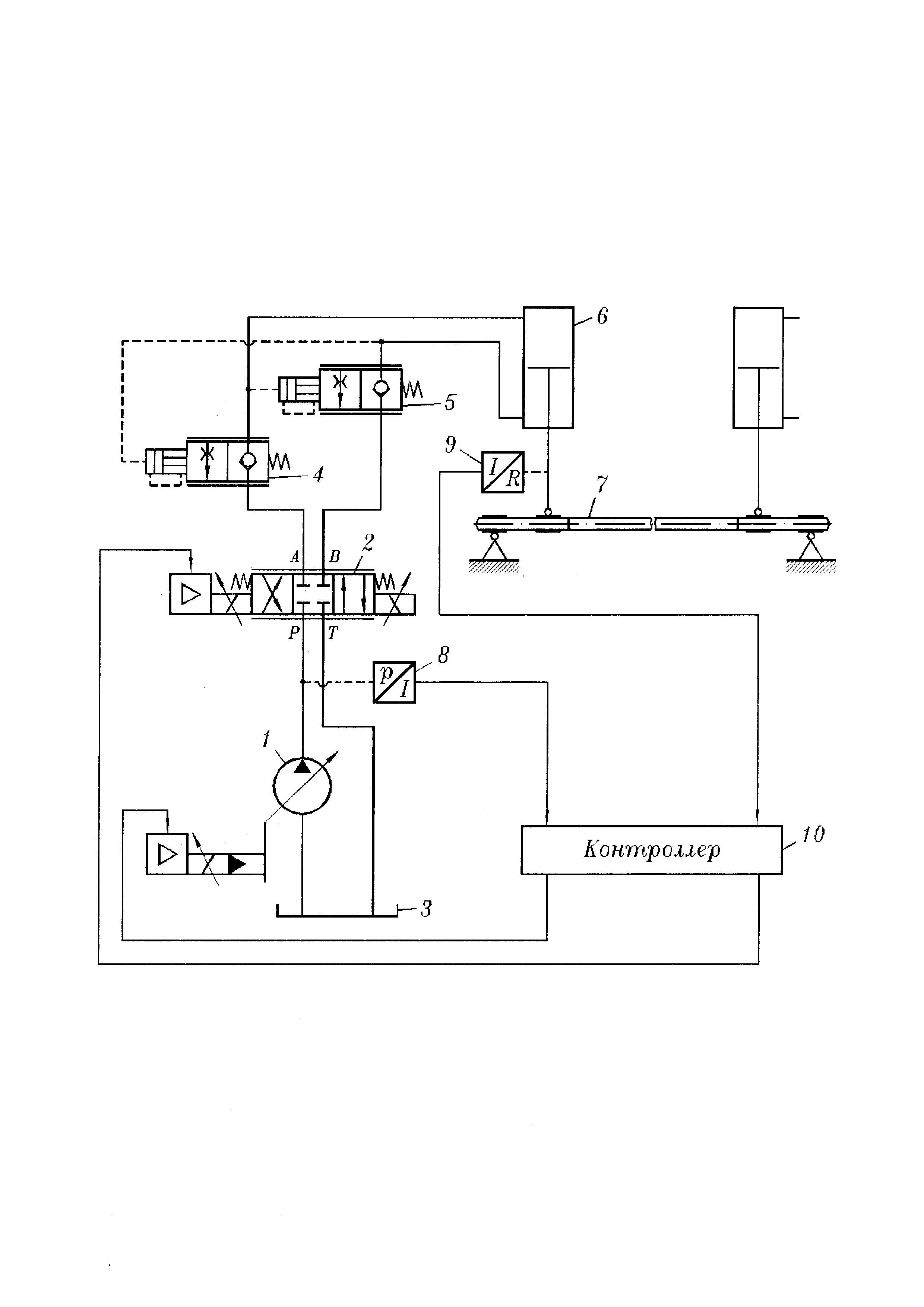
Сущность изобретения поясняется чертежом, на котором приведен один из возможных вариантов исполнения принципиальной схемы электрогидравлического следящего привода (при работе которого контролируемым параметром является силовой параметр на выходном звене гидродвигателя) для осуществления предлагаемого способа управления.
Электрогидравлический следящий привод включает в свой состав регулируемый насос 1, выполненный с регулятором рабочего объема с пропорциональным электрическим управлением, четырехлинейный трехпозиционный гидрораспределитель 2 с пропорциональным электрическим управлением, напорный канал Р которого соединен с напорным каналом насоса 1, сливной канал Т с гидробаком 3, а исполнительные каналы А и В посредством тормозных клапанов соответственно 4 и 5 с рабочими полостями гидродвигателя 6 двухстороннего действия.
Управление гидрораспределителем 2 может быть пропорциональным электрогидравлическим. В качестве гидрораспределителя 2 может использоваться сервоклапан.
На чертеже гидродвигатель 6 изображен как поршневой гидроцилиндр двухстороннего действия с односторонним штоком. В общем случае это может быть поршневой гидроцилиндр двухстороннего действия с двухсторонним штоком (дифференциальный или недифференциальный), два плунжерных гидроцилиндра, работающие друг против друга, гидромотор или поворотный гидродвигатель.
Выходным звеном гидродвигателя (гидроцилиндра) 6 в рассматриваемом случае является его шток. Выходное звено (шток) гидродвигателя (гидроцилиндра) 6 соединен с упругим элементом 7 (например, трубой), подвергаемым испытанию на долговечность поперечными силами, создающими изгибающий момент.
Тормозные клапаны 4 и 5 предназначены для исключения неуправляемого движения выходного звена (штока) гидродвигателя (гидроцилиндра) 6 при работе его с попутной нагрузкой, то есть с нагрузкой, действующей в направлении движения выходного звена, путем создания необходимого подпора в сливной полости гидродвигателя при принятом ограниченном перепаде давления на рабочих окнах гидрораспределителя 2.
Для измерения давления в напорном канале насоса 1 к указанному каналу подключен датчик 8 давления, а для измерения силового параметра (в данном случае силы) на выходном звене (штоке) гидродвигателя (гидроцилиндра) 6 используется датчик 9 силового параметра (силы).
Управление электрогидравлическим следящим приводом осуществляется посредством контроллера 10. При этом датчики 8 и 9 соединены с соответствующими входными каналами контроллера 10, а электрические входные каналы гидрораспределителя 2 и регулятора рабочего объема насоса 1 соединены с соответствующими выходными каналами контроллера 10.
Предлагаемый способ управления электрогидравлическим следящим приводом реализуется следующим образом.
Посредством контроллера 10 формируется входной электрический сигнал, определяющий потребное текущее значение Rзад контролируемого силового параметра (в рассматриваемом случае силы) на выходном звене (штоке) гидродвигателя (гидроцилиндра) 6. На основании этого сигнала и сигнала обратной связи (о фактическом значении Rфак силового параметра на выходном звене гидродвигателя 6), поступающего в контроллер 10 от датчика 9 силового параметра, в контроллере формируется управляющий электрический сигнал для пропорционального гидрораспределителя 2, вызывающий изменение положения золотника гидрораспределителя 2 и коммутации рабочих полостей гидродвигателя 6 с напорным каналом насоса 1 и гидробаком 3 таким образом, что при наличии рассогласования текущих фактического Rфак и заданного Rзад значений силового параметра это рассогласование устраняется (путем изменения текущего фактического значения Rфак силового параметра, измеряемого посредством датчика 9, в направлении его заданного значения Rзад).
Если текущее фактическое значение Rфак силового параметра на выходном звене гидродвигателя 6 в соответствии с сигналом датчика 9 по абсолютной величине меньше текущего заданного значения Rзад


где


Aнп, Асп- характерные геометрические размеры (в рассматриваемом случае эффективные площади поршня) гидродвигателя (гидроцилиндра) 6 со стороны соответственно его напорной и сливной рабочих полостей;
Fтр - потеря силового параметра (в рассматриваемом случае потеря силы), обусловленная трением в подвижных парах гидродвигателя (гидроцилиндра) 6;
Δрнп - потери давления на участке гидропривода между напорным каналом насоса 1 и напорной рабочей полостью гидродвигателя 6, включая перепад давления на напорном рабочем окне гидрораспределителя 2, минимально необходимые для решения задач регулирования контролируемого параметра (см. статью: Casey В. Understanding load-sensing control // Machinery lubrication. - 2006. - №3);
Gнп - коэффициент проводимости участка гидропривода между напорным каналом насоса 1 и напорной рабочей полостью гидродвигателя 6 (с учетом коэффициента проводимости напорного рабочего окна гидрораспределителя 2);
Gсп - коэффициент проводимости участка гидропривода между сливной рабочей полостью гидродвигателя 6 и гидробаком 3 (с учетом коэффициента проводимости сливного рабочего окна гидрораспределителя 2);
рт.кл - давление открытия проходного сечения тормозного клапана (4 или 5), установленного на выходе из сливной полости гидродвигателя 6.
Выше и далее по тексту описания изобретения рабочие полости гидродвигателя 6, которые в текущий момент времени соединены посредством гидрораспределителя 2 с напорным каналом насоса 1 и с гидробаком 3, называются соответственно напорной и сливной полостями, а рабочие окна гидрораспределителя 2, через которые рабочая жидкость поступает в напорную полость гидродвигателя 6 и вытесняется из сливной полости последнего, называются соответственно напорным и сливным рабочими окнами.
Следует отметить, что при работе электрогидравлического следящего гидропривода со встречной нагрузкой и рн1>рн2 (то есть при рн=рн1) гидравлическое сопротивление тормозных клапанов 4 и 5 по сравнению с гидравлическим сопротивлением рабочих окон гидрораспределителя 2 является незначительным, в связи с чем отношение Gнп/Gсп в формуле (2) фактически представляет собой отношение коэффициентов проводимости напорного и сливного рабочих окон гидрораспределителя 2.
Если текущее фактическое значение Rфак силового параметра на выходном звене гидродвигателя 6 в соответствии с сигналом датчика 9 по абсолютной величине больше текущего заданного значения Rзад


где

Если текущие фактическое значение Rфак силового параметра на выходном звене гидродвигателя 6 в соответствии с сигналом датчика 9 и заданное значение Rзад имеют различные знаки, то указанное рассогласование устраняется при работе электрогидравлического следящего привода сначала (до момента приобретения силовым параметром Rфак того же знака, что и у Rзад) в режиме с попутной нагрузкой, а затем (при совпадении знаков силовых параметров Rфак и Rзад) в режиме со встречной нагрузкой. Соответственно, на этапе работы электрогидравлического следящего привода в режиме с попутной нагрузкой вычисление в контроллере 10 необходимого значения давления рн в напорном канале насоса 1 производится по формуле (4), а на этапе работы в режиме со встречной нагрузкой - по формуле (1).
На основании значения давления рн, вычисленного вышеуказанным образом, с учетом сигнала обратной связи (о фактическом значении давления в выходном канале насоса 1), поступающего в контроллер 10 от датчика 8 давления, в контроллере формируется управляющий электрический сигнал для регулятора рабочего объема насоса 1, обеспечивающий работу насоса и гидропривода в целом при потерях давления, минимально необходимых для решения задач регулирования контролируемого силового параметра при работе гидропривода как со встречной, так и с попутной нагрузками.
При этом, благодаря тому, что вычисление в контроллере 10 требуемого значения давления рн в напорном канале насоса 1 производят в функции текущего заданного значения Rзад силового параметра, изменение давления в напорном канале насоса до значения, соответствующего текущей заданной величине силового параметра и окончанию соответствующего переходного процесса, происходит быстрее по сравнению со случаем, когда данное изменение происходит на основании только текущего фактического значения Rфак силового параметра, изменение которого отстает по фазе от изменения значения Rзад. В результате, ускоряется в целом процесс отработки электрогидравлическим следящим приводом управляющего электрического сигнала на изменение контролируемого силового параметра, то есть повышается быстродействие привода.
Литературные источники
1. Гойдо М.Е. Снижение потерь энергии при работе объемных гидроприводов с управлением // Справочник. Инженерный журнал. - 2014. - №1. - С. 18-28 (с. 21, рис. 6).
2. Lovrec D., Deticek Е., Faber F. Electro hydraulic load-sensing with closed-loop controlled actuators - theoretical background // Advances in production engineering & management. - 2009. - №4. - P. 93-104 (c. 94-95, рис. 2).
Реферат
Изобретение относится к электрогидравлическим следящим приводам, при работе которых контролируемым является силовой параметр на выходном звене гидродвигателя. По предложенному способу производят задание потребного значения контролируемого силового параметра на выходном звене гидродвигателя путем формирования посредством контроллера соответствующего электрического входного сигнала, формируют посредством контроллера управляющий электрический сигнал на электрический вход гидрораспределителя для изменения площади проходного сечения его рабочих окон с целью обеспечения заданного закона изменения силового контролируемого параметра, вычисляют в контроллере в функции заданного значения силового контролируемого параметра на выходном звене гидродвигателя требуемое значение давления в напорном канале насоса из условия поддержания гидравлических потерь в гидроприводе на установленном уровне, минимально необходимом для решения задач регулирования силового контролируемого параметра, и формируют посредством контроллера управляющий электрический сигнал на электрический вход регулятора рабочего объема насоса для изменения давления в напорном канале насоса в соответствии с вычисленным значением. Изобретение направлено на повышение быстродействия электрогидравлического следящего привода, контролируемым параметром которого является силовой параметр на выходном звене гидродвигателя. 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Стенд для испытаний труб внутренним давлением и на изгиб
Комментарии