Средство блокировки фиксатора положения вала пневмопривода управления исполнительными механизмами - RU210732U1
Код документа: RU210732U1
Чертежи






Описание
Полезная модель относится к области общего машиностроения, а именно - к пневматическим приводам управления исполнительными механизмами преимущественно в транспортных средствах.
Известно средство блокировки фиксатора положения выходного вала пневмопривода системы управления исполнительными механизмами, имеющего главный пневмоцилиндр (ГПЦ) с корпусом, закрытым крышками, и с полостью внутри корпуса, с установленными в корпусе подвижными частями: с поршнем внутри корпуса, делящим полость ГПЦ на левую и правую полости, с зубчатой рейкой, закрепленной на поршне с возможностью перемещения вместе с поршнем и с выходным валом, ось которого перпендикулярна оси ГПЦ, и опирающимся на корпус ГПЦ, по меньшей мере, один конец которого выступает из корпуса, и зубчатой шестерней на выходном валу внутри корпуса, зубья которой взаимодействуют с зубьями рейки; датчик положения подвижных частей; управляющий механизм, соединенный с выступающим из корпуса концом выходного вала. При этом на конце выходного вала, выступающего из корпуса, установлен диск с трапециевидными вырезами, количество которых равно заданному числу угловых положений выходного вала с диском, и многопозиционный командоаппарат в качестве управляющего механизма; на корпусе ГПЦ расположен датчик положения подвижных частей, взаимодействующий с диском с трапециевидными вырезами, являющийся датчиком угловых положений диска, а на корпусе ГПЦ расположены: первый стопор с конусообразным концом с приводом от первого пневмоцилиндра одностороннего действия, взаимодействующий с трапециевидными вырезами на диске, служащий для фиксирования углового положения выходного вала и выходящий из взаимодействия при подаче команды на изменение положения выходного вала; второй стопор с конусообразным концом, взаимодействующий с трапециевидными вырезами на диске, с приводом от второго пневмоцилиндра одностороннего действия (патент RU 2718382, F15B 9/03 (2006.01), Опубликовано: 02.04.2020 Бюл. №10).
Данному техническому решению присуща совокупность признаков, наиболее близкая к совокупности существенных признаков заявленного технического решения по достигаемому результату, поэтому оно принято за прототип.
Недостатком известного технического решения является нестабильность состояния включения фиксатора диска положений выходного вала пневмопривода.
Технический результат использования изобретения заключается в повышении стабильности состояния включения фиксатора диска положений выходного вала пневмопривода системы управления исполнительными механизмами.
Ниже раскрыты все общие и частные существенные признаки технического решения, характеризующие их причинно-следственную связь с указанным техническим результатом, достаточные для осуществления полезной модели специалистом в данной области техники.
Средство блокировки фиксатора положения выходного вала пневмопривода системы управления исполнительными механизмами содержит блок фиксации, включающий в себя фиксатор положения выходного вала в виде пневмоцилиндра одностороннего действия с оборудованным возвратной пружиной проходным штоком, имеющим с внутреннего конца заостренную форму, с возможностью взаимодействия с указанными впадинами на диске, и имеющим с наружного конца тяговый элемент с рукояткой его ручного перемещения и ограничитель поворота диска, выполненный в виде размещенного соосно указанному фиксатору пневмоцилиндра одностороннего действия с проходным штоком с возвратной пружиной и, имеющим с наружного конца штока тяговый элемент с рукояткой его ручного перемещения.
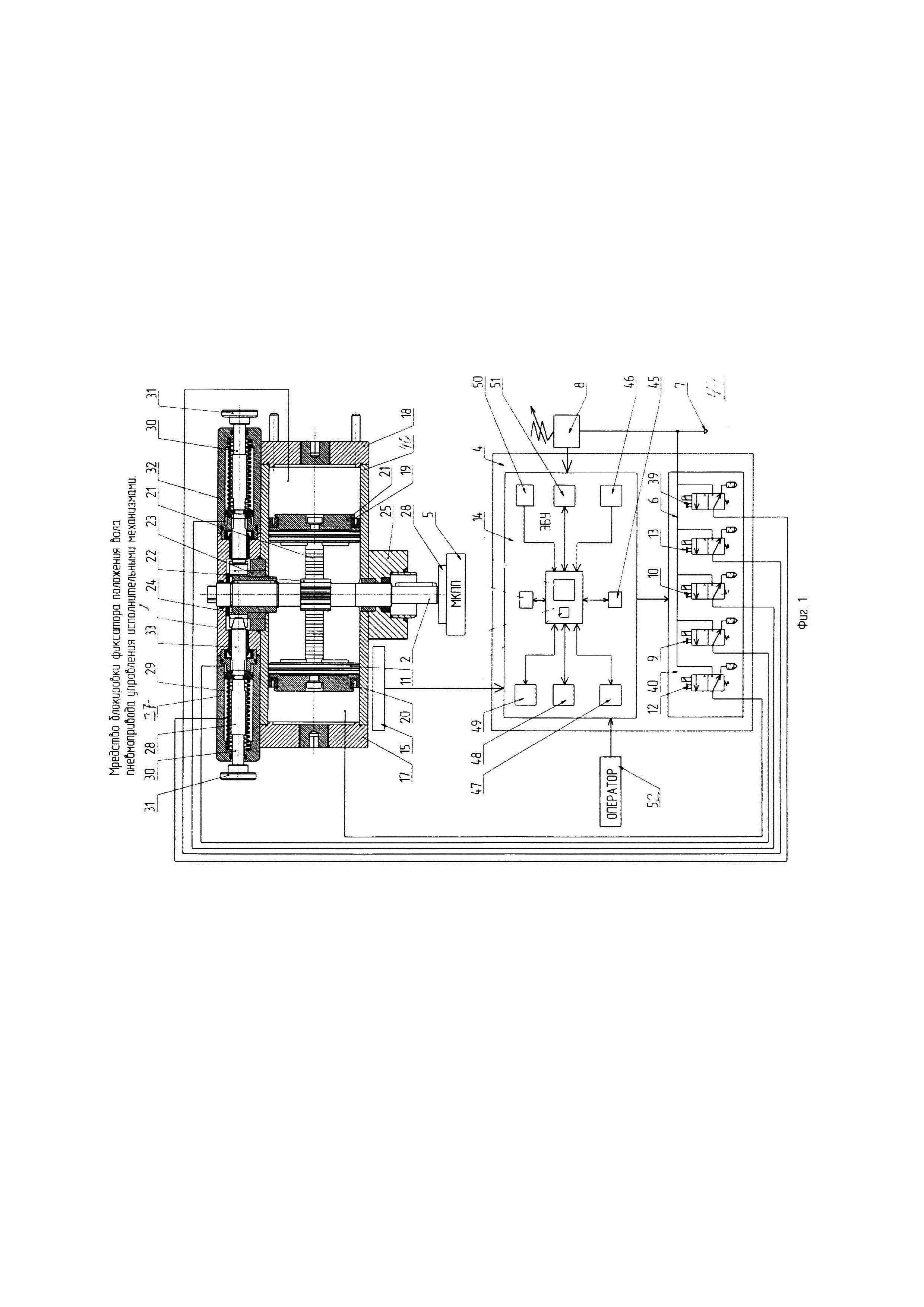
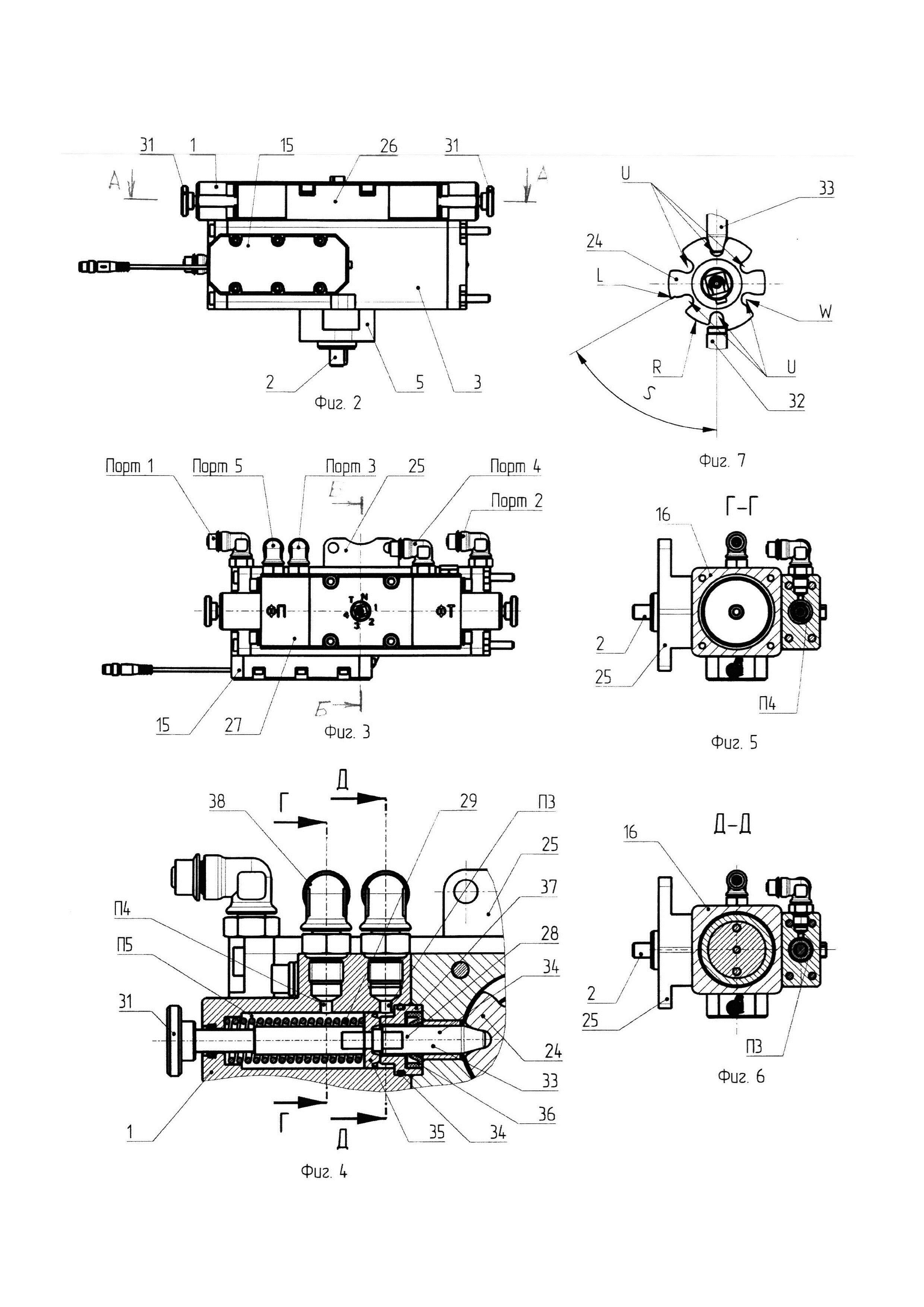
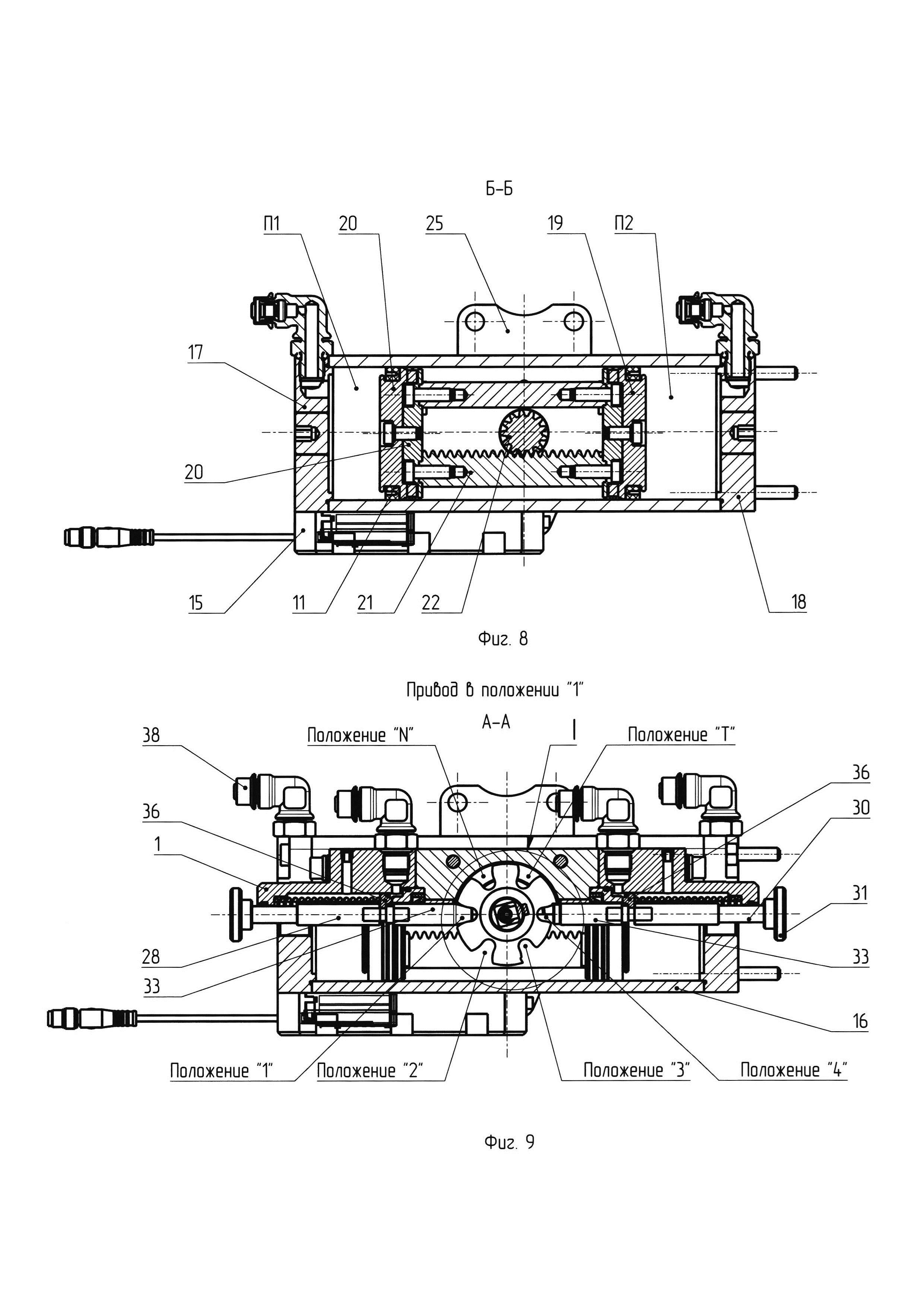
Полезная модель иллюстрируется чертежами, где: на фиг. 1 показан общий вид средства блокировки фиксатора положения вала пневмопривода управления исполнительными механизмами в продольном осевом разрезе с электронным блоком управления и блоком пневмораспределителей; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - продольный разрез фиксатора в зоне установки штока; на фиг. 5 - разрез Г-Г на фиг. 4, блокировка диска в положении «1» и в положении «4»; на фиг. 6 - разрез Д-Д на фиг. 4; на фиг. 7 - вид сверху на диск со штоком и ограничителем; на фиг. 8 - разрез Б-Б на фиг. 3; на фиг. 9 - разрез А-А на фиг. 2; на фиг. 10-13 - средство блокировки фиксатора положения вала пневмопривода в разрезе в разных положениях (положения 1-4) штока 33 относительно диска 24; на фиг. 14 - средство блокировки фиксатора положения вала пневмопривода в разрезе в положении N - «нейтраль»; на фиг. 15 - средство блокировки фиксатора положения вала пневмопривода в разрезе в положении Т - «тормоз-синхронизатор»; на фиг. 16 - поршень в разрезе; на фиг. 17 - алгоритм работы средства блокировки фиксатора положения выходного вала пневмопривода в составе системы управления исполнительными механизмами.
Средство блокировки фиксатора 1 положения выходного вала 2 пневмопривода 3 системы управления 4 исполнительными механизмами 5 содержит пневмомагистраль 6 с источником 7 и датчиком 8 давления воздуха; два двухпозиционных пневмораспределител 9, 10 с электромагнитным управлением пневмоцилиндром одностороннего действия командоаппарата 26 и два двухпозиционных пневмораспределителя 12 и 13 с электромагнитным управлением положением поршня 11 выходного вала 2; электронный блок управления ЭБУ 14 пневмораспределителями, выполненный с возможностью получения сигналов от датчика положения 15 рабочего поршня 11 и датчика 8 давления воздуха в пневмомагистрали 6.
Пневматический привод 3 содержит пневмоцилиндр 16, полость которого закрыта с торцов крышками 17 и 18, а внутри полости установлен упомянутый рабочий поршень 11, выполненный в виде двух разнесенных герметизированных плунжеров 19 и 20, снабженных продольной зубчатой рейкой 21, сцепленной в средней части зубьями с зубчатым колесом 22, установленного на опорах 23 в пневмоцилиндре 16 выходного вала 2.
Вал 2 жестко связан с диском 24 фиксированных положений и выполнен с возможностью соединения с приводом исполнительного механизма 5.
Диск 24 положений выполнен в виде тангенциально распределенных открытых радиальных впадин U, количество которых равно количеству фиксируемых угловых положений выходного вала, снабженного датчиком его угловых положений (использован эквивалентный линейный датчик положения 15 рабочего поршня 11 с пересчетом на значения угловых положений вала 2).
Пневмоцилиндр 16 снабжен: кронштейном 25; многопозиционным командоаппаратом 26, соединенным с выходным валом 2; блоком фиксации 27, включающим в себя фиксатор 1 положения выходного вала 2 в виде пневмоцилиндра одностороннего действия с проходным штоком 28 и с возвратной пружиной 29, имеющим с одного конца заостренную форму с возможностью взаимодействия с впадинами U на диске 24, и имеющим с наружного конца штока 28 тяговый элемент 30 с рукояткой 31 его ручного перемещения и ограничитель поворота 32 диска 24, выполненный в виде размещенного соосно фиксатору 1 пневмоцилиндра одностороннего действия с проходным штоком 28 с возвратной пружиной 29 и, имеющим с наружного конца штока 28 тяговый элемент 30 с рукояткой 31 его ручного перемещения.
Фиксатор 1 положения выходного вала 2 размещен в блоке фиксации 27, в котором расположен проходной шток 28, состоящий из запорной части, выполненной в виде цилиндрического стержня 33 с заостренным одним концом с возможностью сопряжения с впадинами U на диске 24 положений и цилиндрическим хвостовиком 34 на другом конце.
На хвостовик 34 подвижно насажен поршневой упор 35, опертый в бурт на цилиндрическом стержне 33, установленном на герметизированной внутренней опоре 36 с возможностью образования между ними рабочей полости П3, соединенной с напорной магистралью пневмораспределителя 9 и с возможностью фиксации диска 24 положений заостренным концом запорной части штока 28 посредством высвобождения предварительно сжатой возвратной пружины 29, сопряженной с другой стороной поршневого упора 35.
Цилиндрический хвостовик 34 соединен с тяговым элементом 30 ручного перемещения с возможностью регулирования их суммарной длины посредством муфты 37, расположенной внутри возвратной пружины 29, вокруг которой образована дополнительная полость П4, сообщенная через штуцер 38 с дополнительным пневмораспределителем 39 с возможностью блокирующего поджатая заостренного конца запорной части штока 28 во впадину U на диске 24 положений.
Рабочий поршень 11 выполнен в виде пустотелого корпуса 40, образованного верхней 41 и нижней 42 продольными распорками, соединенными болтами 43 с указанными плунжерами 19 и 20.
Выходной вал 2 размещен между распорками 41 и 42 с зацеплением своим зубчатым колесом 22 с нижней распоркой 42, частью которой является зубчатая рейка 21.
Сравнение заявленного технического решения с уровнем техники известным из научно-технической и патентной документации на дату приоритета в основной и смежной рубриках не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в предложенной заявителем формуле полезной модели, включая характеристику назначения. Т.е, совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, оно соответствует условию патентоспособности "новизна".
Данное техническое решение промышленно применимо, поскольку в описании к заявке и названии полезной модели указано его назначение, оно может быть осуществлено промышленным способом для дополнительного блокирующего поджатия заостренного конца запорной части штока, осуществимо и воспроизводимо, а отличительные признаки, приведенные в формуле полезной модели устройства позволяют получить заданный технический результат, т.е. являются существенными.
Техническое решение в том виде, как оно охарактеризовано в формуле полезной модели, может быть осуществлено с помощью средств и методов, описанных в патенте RU 2718382, ставшим общедоступным до даты приоритета полезной модели.
Следовательно, заявленное техническое решение соответствует условию патентоспособности "промышленная применимость".
Для подтверждения возможности осуществления полезной модели ниже приводятся следующие сведения о работе устройства, раскрывающие, как может быть осуществлено техническое решение с реализацией указанного назначения и с подтверждением возможности достижения технического результата при осуществлении реализацией указанного назначения.
Осуществление заявленной полезной модели достигается реализацией указанного назначения.
Пневматический привод системы управления исполнительными механизмами представляет собой пневмомеханическое устройство, служащее для точного и быстрого позиционирования и фиксации выходного вала 2 пневмопривода в одном из заданных положений. Пневмопривод предназначен для работы в комплексе с электрическим управляемым модулем ЭБУ 14 и блоком пневмораспределителей 44.
Пневмопривод обеспечивает: точное и быстрое позиционирование и фиксацию выходного вала 2 в заданных положениях.
Переключение положений выходного вала 2 осуществляют с использованием сжатого воздуха, подвод которого осуществляется через порты 1, 2, 3, 4, где: порт 1 связан с полостью П1 пневмоцилиндра 16; порт 2 связан с полостью П2 пневмоцилиндра 16; порт 3 связан с рабочей полостью П3 фиксатора 1 диска положений 24; порт 4 связан с рабочей полостью П4 ограничителя 32 поворота диска 24 положений.
Для отслеживания перемещения поршня в пневмоцилиндре 16 используется линейный датчик 15, который подключается к электронному блоку управления ЭБУ 14.
В системе управления работой пневмопривода использована известная схема (фиг. 13), например, из заявки CN №104500717 А от 04.09.2014, где применен модуль широтно-импульсной модуляции (ШИМ-модуль) 45 в системе управления коробкой передач транспортного средства или из патента CN №2029270234 от 21.11.2012, в котором положением поршня управляют импульсной подачей воздуха посредством электрических импульсов, передаваемые от ШИМ-модуля 45 электромагнитам пневмораспределителей или из патента RU №2473824, в котором используется ШИМ-модуль 45 для управления электромагнитами, в процессе которого воздух подают в одну из полостей пневмоцилиндра 16 в виде импульсных воздействий давления воздуха на рабочий поршень 11 при его подаче в обе полости пневмоцилиндра 16 в виде разности импульсных воздействий давления воздуха на поршень.
Также известна подобная схема и из прототипа (патент RU 2718382, F15B 9/03 (2006.01), Опубликовано: 02.04.2020 Бюл. №10).
В этой схеме (фиг. 1) электронный блок управления ЭБУ 14 использует: устройство обработки данных 46; включающее в себя оперативное запоминающее устройство 47, энергонезависимое запоминающее устройство 48 с компьютерной программой, содержащей процедуры управления и сохраняемую с возможностью выполнения или в сжатом состоянии во внешнем запоминающем устройстве 49 или в оперативном запоминающем устройстве 47; интерфейсы 50 соединения с шиной; модуль 51 с часами реального времен. Электронный блок управления ЭБУ 14 использует аналоговые входы, конфигурируемые с возможностью перенастройки измерения величин тока и напряжения с помощью встроенного программного обеспечения или с помощью внешней команды; дискретные входы, конфигурируемые с возможностью выбрать структуру входного сигнала; дискретные входы; выходы с управлением нагрузки по току; выходы с цифровой диагностикой и модуль широтно-импульсной модуляции ШИМ-модуль.
В указанном техническом решении осуществляется способ управления, при котором воздух подают в одну из полостей пневмоцилиндра в виде одного импульса заданной длительности или набора импульсов заданной скважности, в зависимости от положения поршня. Выполняется расфиксация диска положений, подается сигнал управления от ЭБУ на электромагниты пневмоклапанов, открывается один из пневмоклапанов, подается воздух из пневмомагистрали в заданную полость, выполняется поворот диска положений с трапециевидными вырезами на заданный угол против или по часовой стрелке соответственно, после достижения заданного угла поворота диска, регистрируемого датчиком, затем ЭБУ переключается на управление ШИМ-модулем электромагнитами пневмоклапанов блока фиксации и после определения с помощью датчика углового положения диска осуществляют подачу импульсов на электромагниты пневмоклапанов управления пневмоцилиндром, в зависимости от выбранного направления вращения диска положений, после чего подают воздуха в одну из полостей пневмоцилиндра в виде одного или более импульсов в соответствующие надпоршневые полости для перемещения поршня и связанного с ним вращения выходного вала в заданном направлении.
Работа пневматического привода системы управления исполнительными механизмами осуществляется следующим образом.
Пневматический привод обеспечивает позиционирование выходного вала 2 в трех режимах: штатный режим работы, переключение привода в ручном режиме и переключение привода электронным блоком управления в случае выхода из строя линейного датчика 15 перемещения поршня 11.
Реализация использования средства блокировки фиксатора 1 может быть проиллюстрирована на приведенном ниже примере управления механизмом переключения передач трактора.
Пневмопривод позволяет осуществлять поворот и фиксацию выходного вала 2 в шести положениях (фиг. 10-15): Т, N, 1, 2, 3, 4, где: N - положение «нейтраль»; Т - положение «тормоз-синхронизатор»; 1-4 номера передач МКПП.
Пневмопривод предотвращает произвольное переключение в положение Т в случае обрыва подводящих сжатый воздух патрубков, обрыва проводов датчика 15 или выхода из строя пневмораспределителей, управляющих подачей сжатого воздуха.
Переключение привода осуществляется с использованием сжатого воздуха, подключение которого осуществляется через порты 1, 2, 3, 4 (фиг. 11) где, порт 1 связан с одной полостью приводного пневмоцилиндра; порт 2 связан со второй полостью приводного пневмоцилиндра; порт 3 связан с рабочей полостью фиксатора положений; порт 4 связан с рабочей полостью ограничителя хода.
В одну из полостей цилиндра, через порт 1 (для вращения вала против часовой стрелки) или порт 2 (для вращения вала по часовой стрелке), импульсно подается сжатый воздух. Линейное перемещение поршня преобразуется во вращательное движение выходного вала 2 посредством передачи «рейка-зубчатое колесо», где рейка 21 является составной частью рабочего поршня 11 приводного пневмоцилиндра 16, а зубчатое колесо 22 является частью вала 2 пневмопривода.
На валу 2 расположен диск 24 с шестью впадинами U трапецеидальной формы контактной части со скругленными боковыми сторонами.
Выходной вал 2 неподвижно блокируется в требуемом положении фиксатором положений 1 с конической контактной частью, которая входит в зацепление с одним из ответных пазов U трапецеидальной формы на диске 24 положений.
В неактивном состоянии ограничивается поворот вала 2 в пределах сектора S, крайние точки которого соответствуют соседним друг другу впадинам U для положений «N» и «1».
Фиксатор 1 диска 24 положений выходит из зацепления со впадиной U при подаче в порт 3 сжатого воздуха и возвращается в исходное положение под воздействием механической пружины 29 при сбросе воздуха.
Ограничитель поворота 32 диска 24 положений выходит из зацепления с впадиной U. При подаче в порт 4 сжатого воздуха ограничитель поворота 32 возвращается в исходное положение под действием механической пружины 29 при сбросе воздуха, опираясь торцом штока в цилиндрическую поверхность диска 24 положений. Это дает эффект тормоза-замедлителя, осуществляющего безударный контакт острия штока 33 фиксатора 1 с соответствующей впадиной U диска 24 положений.
В крышках 17 и 18 пневмоцилиндра 16 установлены резьбовые ограничители хода 53 плунжеров 19 и 20 пневмоцилиндра 16 в крайних положениях, что соответствует положениям оси привода «Т» и «4».
В заявленном устройстве используется известная, в том числе и из прототипа RU 2718382 система управления, которой осуществляется способ управления пневмоприводом в соответствии со схемой (алгоритмом) его работы (фиг. 17).
Посредством системы управления ЭБУ 16 подает электрический сигнал на пневмораспределители 9, 10, 12, 13, 39 блока пневмораспределителей 44, из которых двухпозиционные пневмораспределители 12 и 13 реализуют электромагнитное управление положением плунжеров 19 и 20. Пневмораспределители 9 и 10 (фиг. 1) управляют фиксатором 1 диска 24 положений и ограничителем поворота 32 диска 24 положений.
Чтобы повернуть выходной вал 2 по часовой или против часовой стрелки необходимо расфиксировать диск 24 положений путем подачи электрического сигнала на катушки пневмораспределителей 9 и 10.
В зависимости от алгоритма ЭБУ 14 выдает электрический сигнал на катушки пневмораспределителей 12 и 13, осуществляя подачу воздуха в одну из полостей П1 или П2 пневмоцилиндра 16.
В зависимости от этого приводной вал 2 с диском 24 положений поворачивается по часовой или против часовой стрелки.
С помощью датчика положения 15 определяют текущее положение плунжеров 19 и 20 пневмоцилиндра 16.
Система постоянно проверяет состояние датчиков и некоторых параметров системы. Если датчик положения 15 не работает (выдает некорректный сигнал), то оператору 52 выдается сообщение о неисправности датчика, а также звуковой сигнал сигнализирует о переходе в аварийное состояние работы.
В аварийном состоянии работы оператор 52 может автоматически включить первую передачу и эвакуировать трактор, для чего сначала по меткам (фиг. 11) положений выходного вала 2 нужно выставить диск 24 в положение «N», а потом включить передачу «Т» (для возможности выбора направления движения «вперед» или «назад»), после чего включить передачу «1» для возможности движения в аварийном.
После выбора нужного режима оператор 52 может последовательно включить любую передачу N-1-2-3-4, причем каждая передача имеет свой диапазон значений датчика 15 в ЭБУ 16.
При выборе нужной передачи сначала подают электрический сигнал на пневмораспределитель 9 фиксатора 1 положений диска 24, в результате чего расфиксируется выходной вал 2. Затем, в зависимости от того, какую передачу нужно включить (повышенную или пониженную), подают сигнал на пневмораспределитель 12 или 13.
В момент поворота вала 2 в нужный диапазон происходит непрерывный контроль скорости (поддержание скорости в нужном диапазоне).
Если в момент поворота выходного вала 2 в нужный диапазон какой-либо передачи скорость превысит заданное значение, то осуществляют торможение и к моменту подхода в нужный диапазон отключают сигнал с пневмораспределителя 9. Фиксатор положений 1 оставшийся путь до нужного диапазона скользит конусообразным концом по поверхности диска 24 положений пока не достигнет нужного диапазона.
Поступает сигнал от датчика 15 - включена нужная передача, затем осуществляют сброс воздуха. Выдается соответствующая надпись на панели. Если передача не включилась, попытка повторяется. Если за определенное время передача включена не будет, то система перейдет в аварийное состояние.
При использовании варианта пневмопривода 1 с дополнительным стопорением фиксатора 1 (фиг. 1, фиг. 12) с электромагнитным управлением для блокирующего поджатая заостренного конца запорной части штока 28 в противолежащей впадине U в диске 24 положений, подают воздух в дополнительную полость П5 через штуцер 38 из напорной пневмомагистрали 6 через дополнительный двухпозиционный пневмораспределитель 39.
Использование полезной модели позволяет решить техническую проблему повышения стабильности состояния включения фиксатора диска положений выходного вала путем создания дополнительного блокирующего поджатая и блокировки заостренного конца запорной части штока в противолежащей впадине в диске положений выходного вала.
Реферат
Полезная модель относится к области общего машиностроения, а именно к пневматическим приводам управления исполнительными механизмами, преимущественно в транспортных средствах. Технический результат - повышение стабильности состояния включения фиксатора диска положений выходного вала пневмопривода системы управления исполнительными механизмами. Средство блокировки фиксатора положения выходного вала пневмопривода системы управления исполнительными механизмами, включающее в себя: пневмомагистраль с источником и датчиком давления воздуха; два двухпозиционных пневмораспределителя с электромагнитным управлением положением рабочего поршня привода выходного вала и два двухпозиционных пневмораспределителя с электромагнитным управлением положением выходного вала; электронный блок управления пневмораспределителями, выполненный с возможностью получения сигналов от датчика положения рабочего поршня и датчика давления воздуха в пневмомагистрали. Пневматический привод содержит пневмоцилиндр, полость которого закрыта с торцов крышками, а внутри полости установлен упомянутый рабочий поршень, выполненный в виде двух разнесенных герметизированных плунжеров, снабженных продольной зубчатой рейкой, сцепленной в средней части зубьями с зубчатым колесом, установленным на опорах в пневмоцилиндре выходного вала. Вал жестко связан с диском фиксированных положений и выполнен с возможностью соединения с приводом исполнительного механизма. Указанный диск положений выполнен в виде тангенциально распределенных открытых радиальных впадин, количество которых равно количеству фиксируемых угловых положений выходного вала, снабженного датчиком его угловых положений. Пневмоцилиндр снабжен: кронштейном; многопозиционным командоаппаратом, соединенным с выходным валом; блоком фиксации, включающим в себя фиксатор положения выходного вала в виде пневмоцилиндра одностороннего действия с проходным штоком и с возвратной пружиной, имеющим с внутреннего конца заострённую форму с возможностью взаимодействия с указанными впадинами на диске и имеющим с наружного конца штока тяговый элемент с рукояткой его ручного перемещения и ограничитель поворота диска, выполненный в виде размещенного соосно фиксатору пневмоцилиндра одностороннего действия с проходным штоком с возвратной пружиной, и имеющим с наружного конца штока тяговый элемент с рукояткой его ручного перемещения. Фиксатор положения выходного вала размещен в блоке фиксации, в котором расположен проходной шток, состоящий из запорной части, выполненной в виде цилиндрического стержня с заостренным одним концом с возможностью сопряжения с впадинами на диске положений и цилиндрическим хвостовиком на другом конце. На хвостовик подвижно насажен поршневой упор, опёртый в бурт на цилиндрическом стержне, установленном на герметизированной внутренней опоре с возможностью образования между ними рабочей полости, соединенной с напорной магистралью пневмораспределителя и с возможностью фиксации диска положений заостренным концом запорной части штока посредством высвобождения предварительно сжатой возвратной пружины, сопряженной с другой стороной поршневого упора. Цилиндрический хвостовик соединен с тяговым элементом ручного перемещения с возможностью регулирования их суммарной длины посредством муфты, расположенной внутри возвратной пружины, вокруг которой образована дополнительная полость, сообщенная через штуцер с дополнительным пневмораспределителем с возможностью блокирующего поджатия заостренного конца запорной части штока во впадину на диске положений. Рабочий поршень выполнен в виде пустотелого корпуса, образованного верхней и нижней продольными распорками, соединенными болтами с плунжерами. Выходной вал размещен между распорками с зацеплением своим зубчатым колесом с нижней распоркой, частью которой является зубчатая рейка. 17 ил.

Формула
Документы, цитированные в отчёте о поиске
Пневматический привод, система и способ управления пневматическим приводом
Пневматический актуатор и система и способ для его управления
Комментарии