Гидростатический привод сцепления - RU2570244C2
Код документа: RU2570244C2
Чертежи





Описание
Изобретение относится к гидростатическому приводу, в частности гидростатическому приводу сцепления с подающим цилиндром, содержащим корпус и с возможностью осевого перемещения в корпусе, нагружающим камеру сжатия давлением поршень, с преобразующим вращательное движение в осевое движение передачей, а также с приводящим передачу во вращательное движение электромотором со статором и ротором.
Соответствующий такому типу гидростатический привод в виде гидростатического привода сцепления известен из документа DE 19700935 А1. В нем поршень подающего цилиндра приводится в движение посредством электромотора, причем вращательное движение электромотора преобразуется в осевое движение посредством передачи в виде червячной передачи. При этом поршень приводится в движение посредством расположенного на червячной шестерне эксцентрикового пальца.
В этом отношении задача изобретения состоит в улучшении и усовершенствовании таких гидростатических приводов, в частности, в плане повышения коэффициента полезного действия, уменьшения требований к конструктивному пространству и повышения рабочего давления подающего цилиндра.
Задача решается посредством гидростатического привода, в частности гидростатического привода сцепления с подающим цилиндром, содержащим корпус и с возможностью осевого перемещения в корпусе, нагружающим камеру сжатия давлением поршень, с преобразующим вращательное движение в осевое движение передачей, а также с приводящим передачу во вращательное движение электромотором со статором и ротором, причем поршень расположен относительно оси вращения электромотора по оси между камерой сжатия и электромотором.
В качестве альтернативы задача решается при помощи гидростатического привода, в частности гидростатического привода сцепления с подающим цилиндром, содержащим корпус и с возможностью осевого перемещения в корпусе, нагружающим камеру сжатия давлением поршень, с преобразующим вращательное движение в осевое движение передачей, а также с приводящим передачу во вращательное движение электромотором со статором и ротором, причем камера сжатия расположена относительно оси вращения электромотора по оси между поршнем и электромотором. При применении такой компоновки, при сжатии камеры сжатия поршнем корпус подающего цилиндра нагружается в направлении электромотора. При этом поршень протягивается против электромотора, в то время как передача оказывает на поршень растягивающее усилие. Например, шпиндель передачи может быть соединен с поршнем неразъемно. При этом оказалось предпочтительным, если поршень в виде кольцевого поршня перемещается в выполненной кольцеобразно камере сжатия.
Предложенные гидростатические приводы можно использовать, наряду с применением для приведения в действие фрикционной передачи, для других процессов движения, в частности, на автомобиле, в котором большие усилия нужно преобразовывать при помощи сравнительно небольшого электромотора. К этому относится, например, не ограничиваясь только этим, приведение в действие тормозов, в частности рабочих тормозных систем и стояночных тормозов, приведение в действие передач, механизмов, запирающих трансмиссию автомобиля на стоянке, дверных приводов и приводов крышек и так далее.
В качестве передачи подходят шпиндельные передачи с приводящим в движение по оси поршнем и выборочно соединенным с ним неразъемно шпинделем и ходовой гайкой, которая может быть сформирована из втулки с возможностью непосредственного приведения ее в движение ротором электромотора или быть сформирована им. Кроме того, для снижения трения может быть предусмотрен шпиндель в виде шарикового винта с циркуляцией шариков. Оказалось особенно предпочтительным, если передача выполнена в виде планетарной обкатной передачи, содержащей перемещающийся по оси поршень, расположенный вдоль оси вращения шпиндель с винтовой резьбой, соосно расположенную с ним приводимую во вращение втулку и перекатывающиеся между ними планетарные колеса и, по существу, известной, например, из документа ЕР 0320621. Предпочтительно, при использовании планетарной обкатной передачи можно применять благодаря ее высокому передаточному отношению высокооборотный рассчитанный в отношении своей мощности маломощный электромотор.
В частности, для уменьшения осевого конструктивного пространства передача в виде планетарной обкатной передачи может быть расположена радиально внутри ротора. При этом ротор может опираться на передачу, например на втулку планетарной обкатной передачи. При этом в конструктивном пространстве ротора может быть размещена передача в сборе. При этом функции ротора и втулки можно комбинировать друг с другом. Например, можно исключить конструкцию ротора из листа металла, устанавливая постоянные магниты ротора непосредственно на втулке, например, приклеив их к ней. Кроме того, передачу можно интегрировать в ротор, при выполнении на роторе, например, внутренней резьбы для планарных колес планетарной обкатной передачи.
Для достижения особенно компактных гидростатических приводов, элементы и соответственно узлы гидростатического привода могут быть вложены друг в друга. Например, образующий камеру сжатия участок корпуса подающего цилиндра может быть расположен радиально снаружи передачи, а электромотор - рядом по оси с камерой сжатия. При этом предпочтительным оказалось, если электромотор имеет меньший диаметр, чем наружный диаметр камеры сжатия или образующего ее участка корпуса.
Кроме того, оказалось предпочтительным, если в гидростатический привод интегрирована доливочная емкость для гидростатической рабочей среды, предпочтительно, вне конструктивного пространства, то есть в заданном электромотором, передачей и корпусом подающего цилиндра, предпочтительно цилиндрически расположенном вокруг оси вращения электромотора конструктивном пространстве.
Доливочная емкость может быть соединена с камерой сжатия через так называемое продувочное сверление, соединяющее с ней в разгруженном положении поршня и закрываемое поршнем при подводе давления в камеру сжатия. Доливочная емкость может поддерживать в установленном положении равновесие давления с окружающей средой через камеру сжатия предусмотренной компоновки, поэтому рабочая среда может гидростатически доливаться или предварительно напрягаться посредством мембраны в виде сильфона или пружины сжатия, так что при потребности, при небольшом избыточном давлении, рабочая среда подводится в камеру сжатия.
Особенно предпочтительным при кольцеобразно выполненной камере сжатия оказалось, если доливочная емкость расположена радиально внутри камеры сжатия, например, в освобожденном поршневым штоком и внутренней окружностью корпуса подающего цилиндра конструктивном пространстве. При этом поршневой шток или соединенный неподвижно с ним или неразъемно выполненный шпиндель с винтовой резьбой передачи может входить во время перемещения поршня, по меньшей мере, частично по оси в доливочную емкость.
Согласно альтернативному варианту выполнения, доливочная емкость может быть расположена радиально снаружи кольцеобразно выполненной камеры сжатия. При этом диаметр доливочной емкости может быть ограничен радиально внешним диаметром электромотора или другим диаметром конструктивного элемента, обуславливающим заданное конструктивное пространство гидростатического привода.
Для уплотнения протечки подающего цилиндра наружу между корпусом и поршнем может быть предусмотрено уплотнение от негерметичности, например манжетное уплотнение или сильфонное уплотнение. Альтернативно уплотнение от протечки может быть расположено между корпусом и передачей и/или между шпинделем передачи и корпусом.
Согласно предпочтительному варианту выполнения гидростатического привода корпус подающего цилиндра и втулка планетарной обкатной передачи могут быть выполнены неразъемно, например вытянуты из листа металла. При этом подающий цилиндр и планетарная обкатная передача могут быть выполнены в виде конструктивного узла.
В гидростатическом приводе предусмотрено сенсорное устройство, регистрирующее, по меньшей мере, вращательное движение электромотора и передающее данные для коммутирования электромотора, предпочтительно выполненного в виде бесщеточного электромотора. Дополнительно, посредством дополнительных или предусмотренных в сенсорном устройстве датчиков можно регистрировать и определять осевое перемещение поршня. Кроме того, сенсорное устройство может служить для определения проскальзывания планетарной обкатной передачи. Для этого данные считываются в блоке управления гидростатического привода и обрабатываются в нем. При этом сенсорное устройство может непосредственно передавать сигналы в блок управления или иметь предварительный электронный блок, обрабатывающий соответствующие сигналы и передающий преобразованные сигналы в блок управления. Блок управления может быть интегрирован в гидростатический привод, например в электромотор, или установлен на нем. Компоновка сенсорного устройства может быть расположена на противоположной торцевой стороне к вмещающей корпус подающего цилиндра торцевой стороне или на торцевой стороне, вмещающей корпус подающего цилиндра, например между корпусом подающего цилиндра и корпусом электромотора.
Далее приводится более подробное пояснение изобретения посредством изображенных на фиг.1-7 вариантов выполнения. На чертежах представлено следующее:
фиг.1 - гидростатический привод, вид в разрезе;
фиг.2 - усовершенствованный по сравнению с гидростатическим приводом по фиг.1 гидростатический привод с кольцевым поршнем, в разрезе;
фиг.3 - усовершенствованный по сравнению с гидростатическим приводом по фиг.1 гидростатический привод с нераздельным унифицированным узлом из корпуса подающего цилиндра и втулки планетарной обкатной передачи;
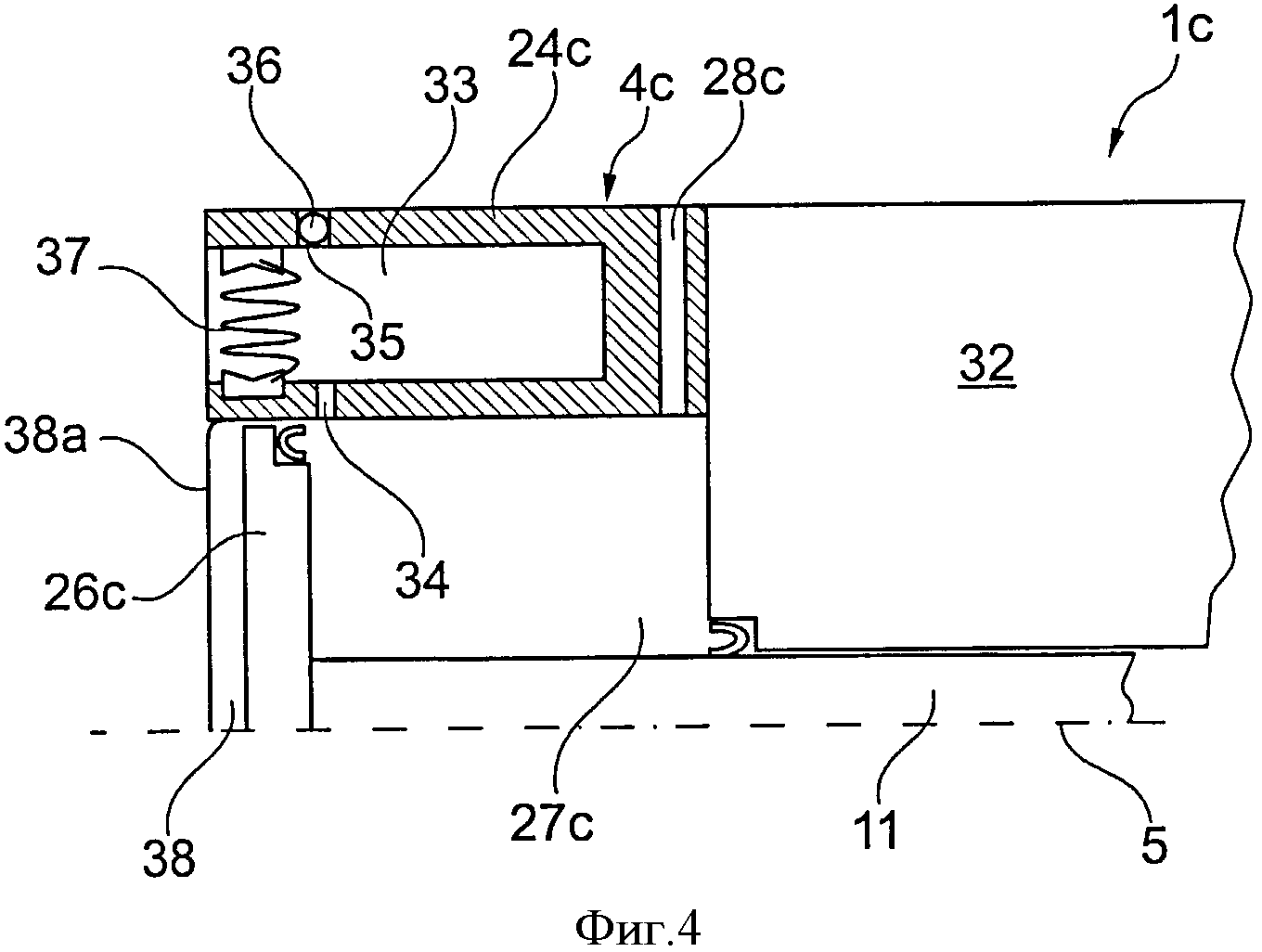
фиг.4 - усовершенствованный по сравнению с гидростатическим приводом по фиг.1 гидростатический привод с интегрированной доливочной емкостью, в частичном разрезе;
фиг.5 - гидростатический привод с перемещаемым планетарной обкатной передачей поршнем, в разрезе;
фиг.6 - электромотор гидростатического привода с различными возможностями компоновки сенсорного устройства, в разрезе;
фиг.7 - усовершенствованный по сравнению с гидростатическим приводом по фиг.2 гидростатический привод с расположенной радиально внутри камеры сжатия доливочной емкостью, вид в частичном разрезе.
На фиг.1 показан в разрезе гидростатический привод 1, например гидростатический привод сцепления с электромотором 2, планетарной обкатной передачей 3 и подающим цилиндром 4, расположенными вокруг оси 5 вращения ротора 6 электромотора 2. Статор 7 электромотора неподвижно соединен в корпусе 8 с крышкой 9. Ротор 6 вмещает радиально внутри планетарную обкатную передачу 3, образованную втулкой 10, шпинделем 11 передачи и перекатывающимися между ними, распределенными по окружности и фиксированными во втулке 10 с возможностью поворота планетарными телами 12 качения. Для повышения передаточного отношения планетарные тела 12 качения имеют грубое зубчатое зацепление 13, входящее в зацепление с внутренним зубчатым зацеплением 14 втулки 10, и участки 15 мелкой резьбы, перекатывающиеся по наружной резьбе 16 шпинделя 11 передачи. В отношении функционирования планетарной обкатной передачи 3 рекомендуется обратиться к документам ЕР 0320621 А1 и DE 19540634 С1.
В показанном варианте выполнения планетарная обкатная передача 3 установлена в роторе 6 соосно к нему, причем функционально шпиндель 11 передачи перемещается по оси при повороте ротора 6. При этом втулка 10 неподвижно соединена с ротором 6. Ротор 6 обычно может быть выполнен из конструкции из листа металла с постоянными магнитами 17, причем конструкция из листа металла неподвижно соединена со втулкой 10, например, при приваривании или запрессовке. Альтернативно постоянные магниты 17 могут быть установлены на втулке 10 по отдельности, например приклеены к ней, так что экономится соответствующее конструктивное пространство для конструкции из листа металла. Втулка 10 обеспечивает как установку планетарной обкатной передачи 3, так и ротора 6 относительно корпуса 8. Для этого предпочтительно образованная из листа металла втулка 10 имеет два осевых выступа 18, 19, на которые установлен соответственно подшипник 20, 21 качения. Подшипник 20 качения неподвижно установлен по оси в участке 22 корпуса 8, подшипник 21 качения несет центрированный в корпусе 8 вкладыш 23. Монтаж ротора 6 с планетарной обкатной передачей 3 осуществляют с открытой стороны корпуса 8, закрываемой после установки ротора 6 посредством крышки 9.
Подающий цилиндр 4 неподвижно соединен посредством своего, предпочтительно, образованного листом металла корпуса 24 с корпусом 8 электромотора, например приварен. Центрирование корпуса 24 относительно корпуса 8 может осуществляться, например, в центровочном буртике 25. Поршень 26 образует с корпусом 24 камеру 27 сжатия, которая может быть снабжена для соединения к напорному трубопроводу посредством напорного патрубка 28, соединенного с напорным трубопроводом, причем напорный трубопровод 28 показан на чертеже только в виде отверстия, в соответствии с желаемым видом соединения: быстроразъемной муфтой, винтовым соединением или им подобными. Вследствие создаваемого при перемещении поршня 26 давления в камере 27 сжатия, предпочтительно, наполненной жидкой рабочей средой, приводится в действие присоединенный к другой стороне напорного трубопровода рабочий цилиндр, действующий на тарельчатую пружину, рычажную пружину или другое средство нагрузки фрикционной передачи, нажимающее или зажимающее в зависимости от варианта выполнения, как принудительно открытая или закрытая фрикционная передача.
Камера сжатия 27 закрывается на отвернутой от электромотора 2 стороне поршня 26, поэтому она нагружается давлением при движении смещения поршня 26. Подвод давления происходит при осевом перемещении шпинделя 11 с винтовой резьбой, принимающего поршень 26 в осевой направляющей 29. При этом шпиндель 11 передачи неподвижно соединен по оси с поршнем 26. Камера 27 сжатия может быть соединена в разгруженном положении с не изображенной на чертеже доливочной емкостью, которая может быть интегрирована в остающееся свободным, например в изображенное пунктиром при разгруженной камере 27 сжатия, свободное пространство 30 между поршнем и корпусом 24. На чертеже не изображено соответствующее соединение, например, разъединяемое поршнем 26 в оттянутом положении и замыкаемое при сжатии камеры 27 сжатия при осевом перемещении поршня 26.
На фиг.2 показан измененный по сравнению с гидростатическим приводом 1 по фиг.1 в отношении выполнения подающего цилиндра 4а гидростатический привод 1а в разрезе, причем электромотор с планетарной обкатной передачей в деталях не изображен и, по существу, соответствует электромотору 2 с планетарной обкатной передачей 3 по фиг.1. В показанном варианте выполнения корпус 24а подающего цилиндра 4а образует кольцеобразную камеру 27а сжатия, ограниченную соответственно выполненной кольцеобразно поверхностью 31 поршня 26а. Камера 27а сжатия расположена в соответствии с камерой 27 сжатия по фиг.1 на отвернутой от электромотора стороне, поэтому приведение в движение поршня 26а происходит в направлении смещения шпинделя 11 с винтовой резьбой. Доливочная емкость может быть предусмотрена в свободном пространстве 30а радиально внутри камеры 27а сжатия.
На фиг.3 показан частичный разрез гидростатического привода 1b, при изменении которого в отличие от гидростатического привода 1, 1а по фиг.1 и по фиг.2 втулка 10а не изображенной планетарной обкатной передачи и корпус 24b подающего цилиндра 4b изготовлены неразъемно, предпочтительно, из листа металла, например, посредством способа глубокой вытяжки. На торцевом конце корпуса 24b выполнена ограниченная поршнем 26b камера сжатия 27b. Поршень 26b может быть непосредственно приформован к шпинделю 11 передачи или соединен с ним. Данная разница передаточного числа между поршнем 26b и шпинделем 11 передачи выравнивается динамическим уплотнением, например уплотнением с уплотнительной манжетой. Альтернативно или дополнительно между поршнем и шпинделями передачи гидростатических приводов может быть предусмотрено неподвижное по оси, однако с возможностью поворота соединение. Кроме того шпиндель передачи может быть расположен со стопорением от прокручивания на неподвижном элементе корпуса, например, на корпусе 24b.
На фиг.4 показан частичный разрез выше оси 5 вращения гидростатического привода 1с, в котором конструкция подающего цилиндра 4с изменена по сравнению с гидростатическими приводами 1, 1a, 1b по фиг.1-3. В показанном гидростатическом приводе 1с образованная поршнем 26с и корпусом 24с камера сжатия 27с с напорным патрубком 28с расположена по оси между поршнем 26с и образованным электромотором и планетарной обкатной передачей конструктивным узлом 32, так что в нем создается давление при перемещении по оси поршня 26с шпинделем 11 передачи в направлении конструктивного узла 32. В соответствии с этим давление создается в направлении протягивания поршня 26с, поэтому подающий цилиндр 4с протягивается против конструктивного узла 32, чем можно достигать преимуществ в отношении статического расчета гидростатического привода 1с. Доливочная емкость 33 интегрирована в корпус 24с и предусмотрена радиально снаружи камеры 27с сжатия. В разгруженном положении камеры 27с сжатия объем доливочной емкости 33 соединен через доливочное отверстие 34 в виде продувочного сверления, так что может происходить уравновешивание рабочей среды, а при необходимости - отправление в доливочную емкость 33 подмешанных из рабочего цилиндра и напорного трубопровода в камеру 27с сжатия воздушных пузырьков. Доливочная емкость 33 заполняется через заливное отверстие 35, которое, как, например, показано на чертеже, закрыто шариком 36. Выравнивание давления доливочной емкости 33 происходит посредством только схематически представленной мембраны 37, которая может быть также выполнена в виде сильфона с осевой складчатостью. Избыточное давление доливочной емкости 33 может уравновешиваться при необходимости посредством не изображенного герметичного отверстия, такого как лабиринтное отверстие и/или мембранное отверстие. Предусмотренное в корпусе 24с для образования камеры сжатия отверстие 38 снабжено, в частности, закрывающей пластиной в виде мембраны или сильфона для предотвращения заноса грязи.
На фиг.5 показан альтернативный вариант выполнения в разрезе гидростатического привода 1d по сравнению с гидростатическим приводом 1с по фиг.4. В нем конструктивный узел 32, по существу, идентичен конструктивному узлу по фиг.1, образованному из электромотора 2 и планетарной обкатной передачи 3. Вследствие приведения в движение поршня 26d в направлении движения натягивания шпинделя 11 передачи может создаваться осевая опора планетарной обкатной передачи 3 против действующего на камеру 27d сжатия усилия нажима со стороны корпуса, например, при опоре на корпус 24d подающего цилиндра 4d, так что силовой поток не проходит через электромотор 2. При этом в показанном варианте выполнения при подводе давления к камере 27d сжатия поршнем 26d неподвижно соединенная с ротором 6 втулка 10d затягивается посредством подшипника 20 качения против упора корпуса 8d, неподвижно соединенного с корпусом 24d подающего цилиндра, так что силовой поток замыкается от втулки 10d, через планетарные тела 12 качения и шпиндель 11 с винтовой резьбой в поршень 26d, а оттуда - через корпус 24d, корпус 8d, через подшипник 20 качения - к втулке 10d. В свободном пространстве 30d радиально внутри камеры 27d сжатия может быть размещена не изображенная доливочная емкость.
На фиг.6 показан конструктивный узел 32 гидростатического привода с электромотором 2 и планетарной обкатной передачей 3, а также возможная компоновка сенсорного устройства 39 для регистрации числа оборотов ротора 6 или втулки 10. На изображении показаны два варианта позиционирования датчиков 40 и 41. Датчики 40, 41 могут быть выполнены в виде датчиков Холла, причем при необходимости эти сенсорные магниты 42 могут быть расположены на противоположном к ним конструктивном элементе с возможностью вращения. Датчики 40, 41 могут приводиться в действие активно или пассивно, между датчиками 40, 41 и не изображенным блоком управления может быть предусмотрен предварительный электронный блок 43, который формирует, например, низкоомные и стандартизованные данные из исходных данных, полученных от датчиков 40, 41, и передает их дальше в блок управления. При помощи полученных данных можно коммутировать выполненный как бесщеточный двигатель электромотор 2 и/или определять посредством известного передаточного отношения планетарной обкатной передачи 3 осевой ход поршня. Кроме того, сенсорное устройство 39 в случае не проскальзывающего выполнения планетарной обкатной передачи 3 может распознавать скольжение, обрабатывать его в блоке управления и компенсировать. Кроме того, сенсорное устройство 39 может содержать датчик давления определения давления в камере сжатия подающего цилиндра. В частных случаях можно предусматривать систему измерения перемещения поршня.
На фиг.7 показан изображенный выше оси 5 вращения схематичный частичный разрез гидростатического привода 1e, похожего на гидростатический привод 1d по фиг.5. В отличие от него подающий цилиндр 4е снабжен расположенной радиально внутри образованной поршнем 26е и корпусом 24е камеры 27е сжатия с напорным патрубком 28е доливочной емкостью 33е. Доливочная емкость 33е расположена гидростатически ниже камеры 27е сжатия, поэтому доливочная емкость 33е предварительно напряжена для обеспечения при необходимости требуемого доливания в камеру сжатия. Для этого объем доливочной емкости предварительно напрягают поршнем 44, снабженным уплотнением 45, причем между поршнем 44 и корпусом 24е и соответственно соединенным с ним корпусом 8е электромотора зажат накопитель 46 энергии, например, в виде пружины сжатия или подобного элемента. Через доливочное отверстие 34е доливаемая рабочая среда поступает в участок 47 уплотнения корпуса 24е, в то время как поршень 26е, с одной стороны, уплотняется наружу посредством уплотнения в виде кольцевого уплотнения 48, а с другой стороны, относительно камеры 27е сжатия - посредством уплотнения, в виде кольцевого уплотнения 49. При перемещении поршня 26е в разгруженное от давления положение подающего цилиндра предусмотренные в поршне 26е продувочные пазы 50 выходят за пределы кольцевого уплотнения 49 и разблокируют соединение между доливочной емкостью 33е и камерой 27е сжатия, посредством которой при необходимости может происходить обмен рабочей среды.
Реферат
Изобретение относится к машиностроению, а именно к гидростатическому приводу, в частности гидростатическому приводу сцепления с подающим цилиндром. Гидростатический привод содержит электромотор со статором и ротором, приводящим передачу во вращательное движение. Передача преобразует вращательное движение в осевое движение и перемещает поршень, который нагружает камеру сжатия давлением. Для экономии конструктивного пространства конструктивные элементы гидростатического привода сцепления интегрированы друг в друга. Достигается компактность конструкции. 2 н. и 13 з.п. ф-лы, 7 ил.
Комментарии