Способы и устройства для испытания клапанов при неполном ходе с применением управления давлением - RU2691675C2
Код документа: RU2691675C2
Чертежи

Описание
ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в основном относится к системам управления технологическим процессом, и, в частности, к способам и устройству для испытания клапанов при неполном ходе с применением управления давлением.
УРОВЕНЬ ТЕХНИКИ
[002] Системы управления технологическим процессом, подобные применяемым в химической, нефтяной или других отраслях, как правило, содержат один или большее количество технологических контроллеров и устройств ввода/вывода (I/O), соединенных с возможностью осуществления связи с по меньшей мере одной главной рабочей станцией или рабочей станцией оператора и с одним или большим количеством полевых устройств или приборов посредством аналоговых, цифровых или комбинированных аналогово/цифровых шин с применением любых требуемых средств связи (например, проводных, беспроводных и т. д.) и любых протоколов (например, Fieldbus (полевая шина), Profibus®, HART® и т. д.). Полевые устройства, которые могут представлять собой, например, клапаны, позиционеры клапанов, переключатели и первичные измерительные преобразователи (например, датчики температуры, давления и расхода), выполняют функции управления технологическим процессом в рамках технологического процесса, например, открытие или закрытие клапанов и измерение параметров управления технологическим процессом. Контроллеры принимают сигналы, связанные с технологическими измерениями, выполненные полевыми устройствами, обрабатывают эту информацию для осуществления программы управления, а также генерируют управляющие сигналы, которые затем отправляют по шинам или другим линиям связи на полевые устройства для управления осуществлением технологического способа. Таким образом, контроллеры могут выполнять и координировать алгоритмы или программы управления с применением полевых устройств посредством шин и/или других каналов связи, соединенных с возможностью осуществления связи с полевыми устройствами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[003] В данном документе раскрыты способы и устройства для калибровки позиционеров и испытания клапанов при неполном ходе с применением управления давлением. Способ, описанный в примере, включает регулирование выходного давления позиционера клапана для достижения заданной величины давления. Позиционер соединен с исполнительным механизмом для приведения в движение клапана. Позиционер реализуют на основе начального смещения ток-давление. Приведенный в качестве примера способ также включает определение значения аккумулятора, связанного с интегратором позиционера, после схождения выходного давления с заданной величиной давления в пределах порога. Приведенный в качестве примера способ также включает вычисление калиброванного смещения ток-давление для позиционера на основании значения аккумулятора.
[004] Приведенный в качестве примера позиционер клапана содержит контроллер давления для регулирования выходного давления позиционера для достижения заданной величины давления. Контроллер давления задействует интегратор для отслеживания накопленной ошибки. Приведенный в качестве примера позиционер клапана также содержит преобразователь силы тока в давление для преобразования электрического сигнала от контроллера давления в пневматический сигнал. Преобразователь силы тока в давление подлежит компенсации на основе начального смещения ток-давление. Контроллер давления вычисляет калиброванное смещение ток-давление для замены начального смещения ток-давление на основании накопленной ошибки, когда выходное давление приближается к заданной величине давления.
[005] Приведенный в качестве другого примера способ включает генерацию первой заданной величины давления для позиционера клапана, соединенного с исполнительным механизмом для приведения в движение клапана. Первая заданная величина давления основана на целевом положении хода, связанном с испытанием при неполном ходе клапана. Приведенный в качестве примера способ также включает регулирование выходного давления позиционера для достижения первой заданной величины давления. Первую заданную величину давления линейно изменяют в первом направлении для приведения в движение клапана в направлении целевого положения хода, когда выходное давление регулируют для достижения первой заданной величины давления. Приведенный в качестве примера способ также включает определение того, не заклинен ли клапан, на основании выходного давления.
[006] Приведенный в качестве другого примера позиционер клапана содержит контроллер хода для определения целевого положения хода для клапана, соединенного с позиционером посредством исполнительного механизма. Целевое положение хода связано с испытанием при неполном ходе. Приведенный в качестве примера позиционер клапана также содержит контроллер давления для регулирования выходного давления позиционера для достижения первой заданной величины давления. Первая заданная величина давления соответствует целевому положению хода. Первую заданную величину давления линейно изменяют в первом направлении для приведения в движение клапана в направлении целевого положения хода, когда выходное давление регулируют для достижения первой заданной величины давления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
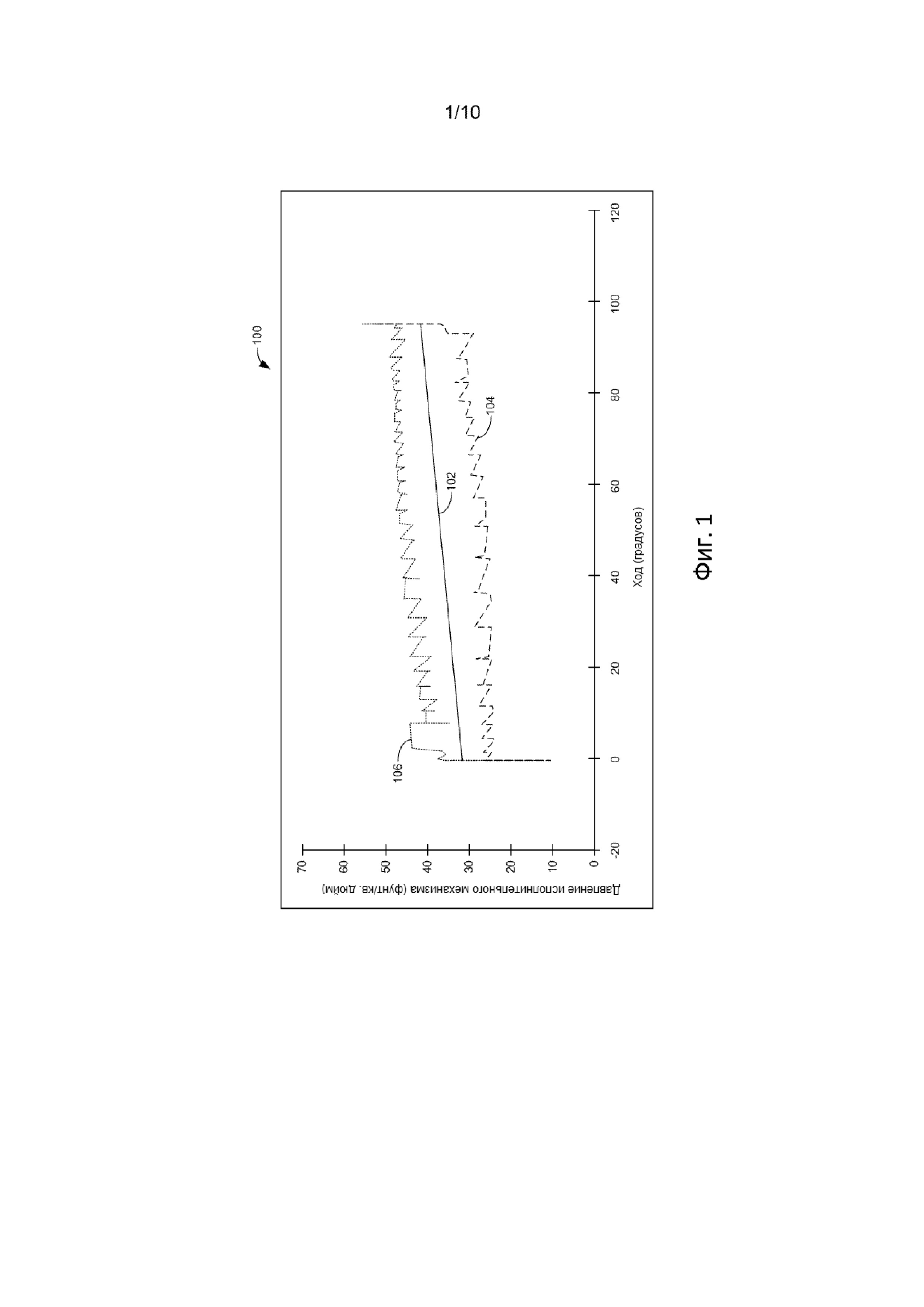
[007] На ФИГ. 1 представлена приведенная в качестве примера кривая 100 давления, соответствующая управлению ходом приведенного в качестве примера отсекающего шарового клапана.
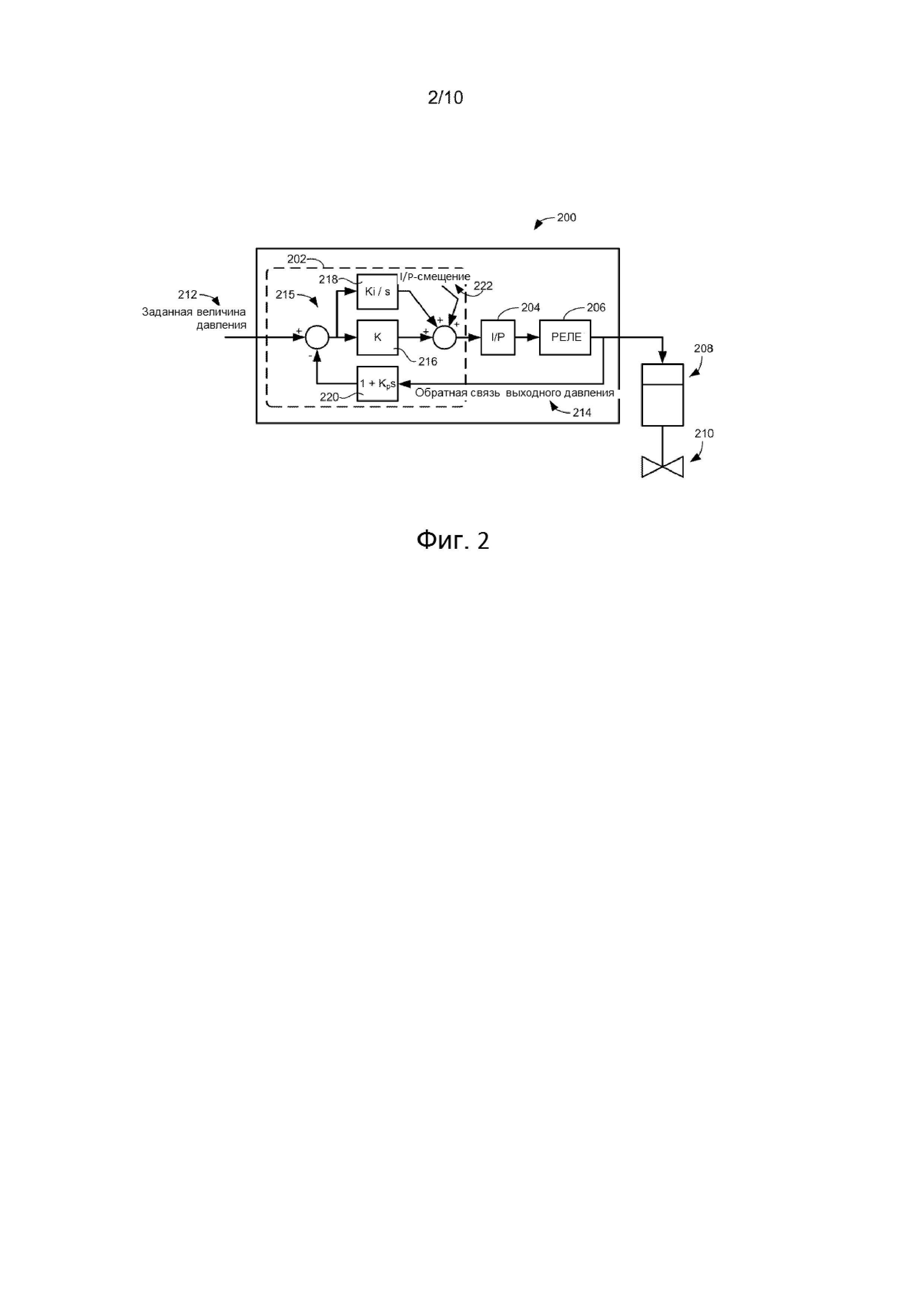
[008] На ФИГ. 2 представлено схематическое изображение приведенного в качестве примера позиционера 200, сконструированного в соответствии с идеями, описанными в настоящем документе.
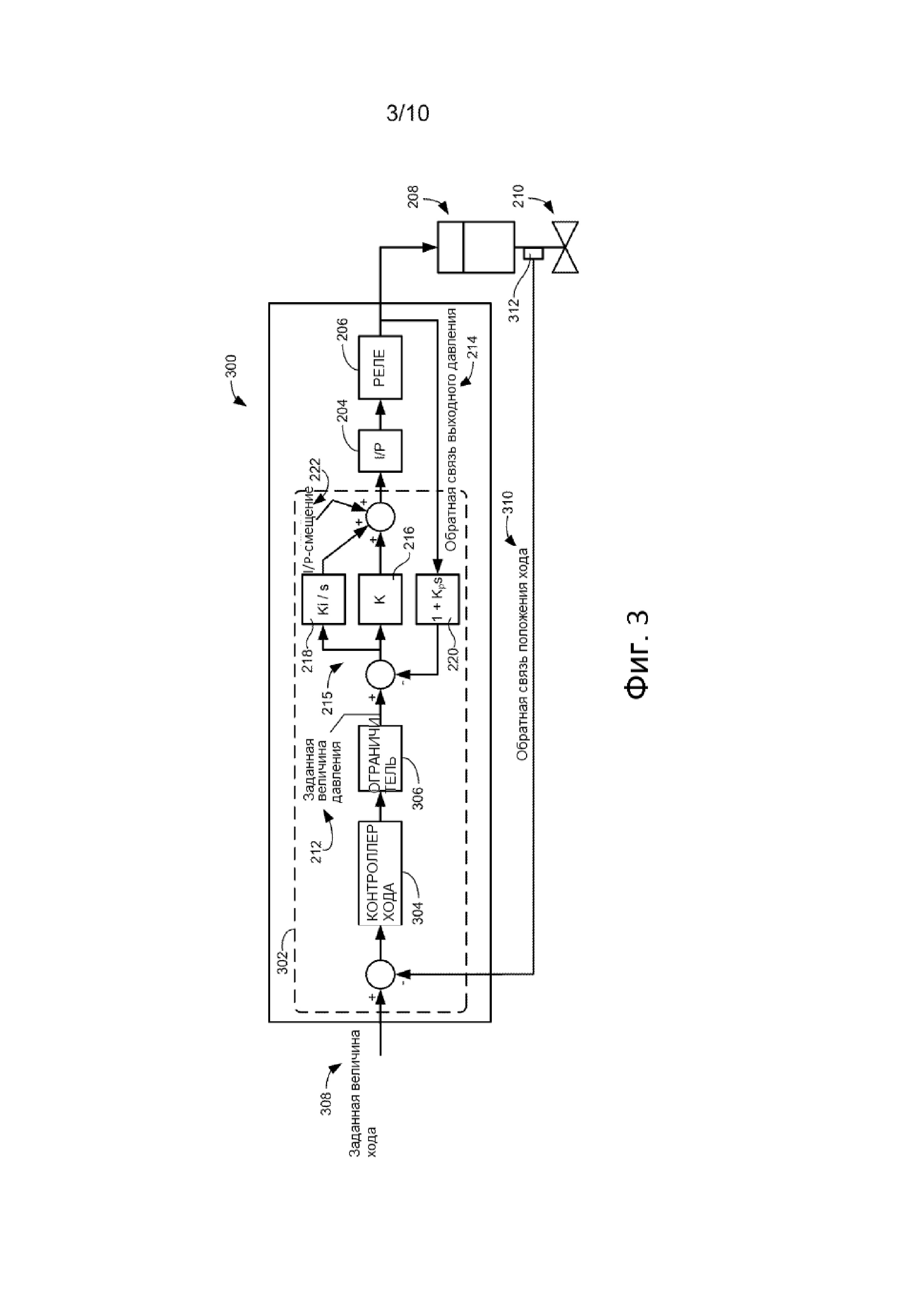
[009] На ФИГ. 3 представлено схематическое изображение другого приведенного в качестве примера позиционера 300, сконструированного в соответствии с идеями, описанными в настоящем документе.
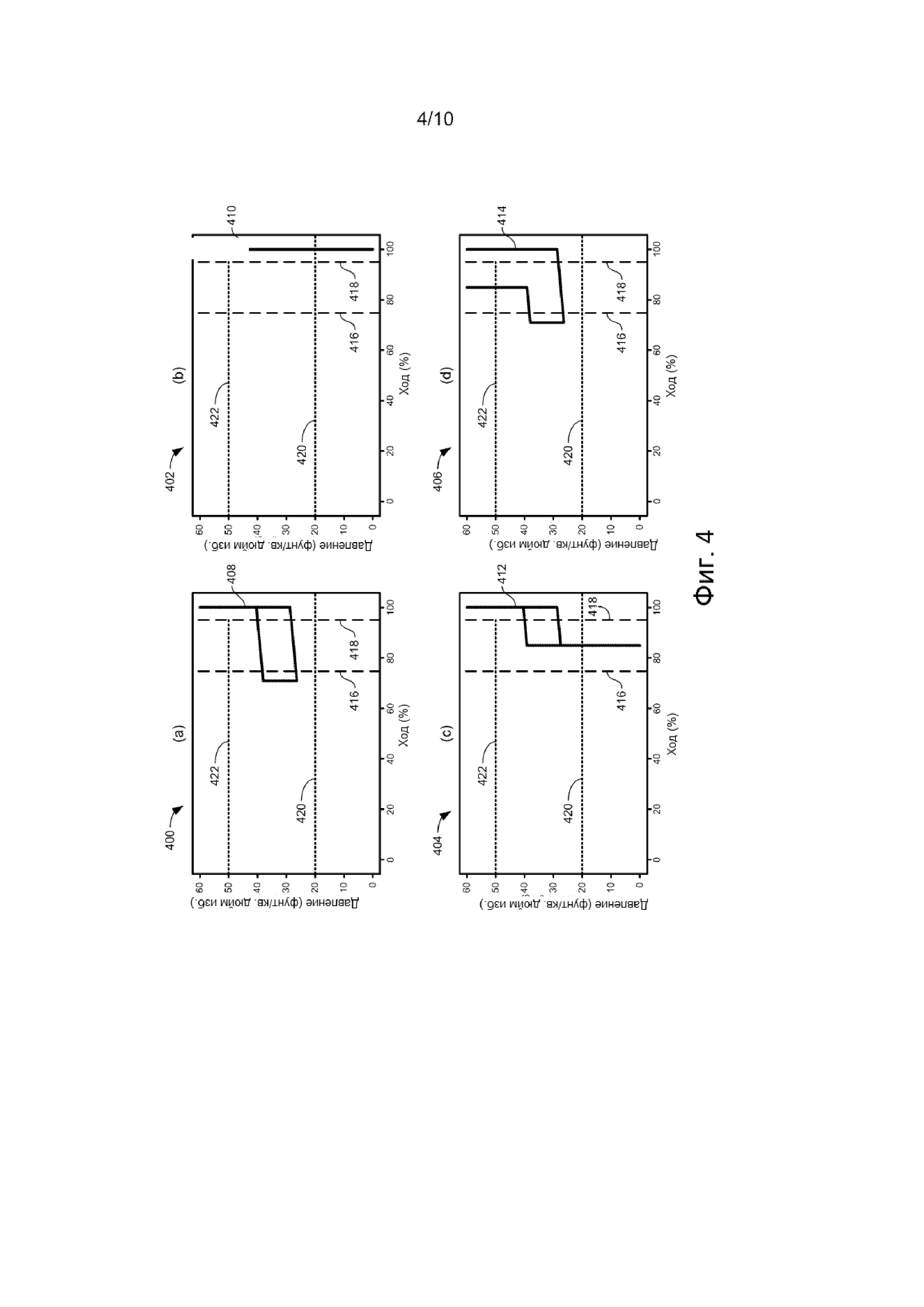
[0010] На ФИГ. 4 представлены приведенные в качестве примера профили волны давления для клапанов, подвергаемых приводимому в качестве примера испытанию при неполном ходе, описанному в настоящем документе.
[0011] На ФИГ. 5-7 показаны блок-схемы, представляющие приведенные в качестве примера способы реализации приведенных в качестве примера позиционеров по ФИГ. 2 и/или 3 для калибровки позиционера для реализации на клапане с пневматическим приводом.
[0012] На ФИГ. 8 показана блок-схема, представляющая приведенный в качестве примера способ реализации приведенных в качестве примера позиционеров по ФИГ. 2 и/или 3 для выполнения испытания при неполном ходе на клапане с пневматическим приводом.
[0013] На ФИГ. 9 показана блок-схема, представляющая приведенный в качестве примера способ реализации приведенных в качестве примера позиционеров по ФИГ. 2 и/или 3 для выполнения испытания при неполном ходе на клапане с пневматическим приводом.
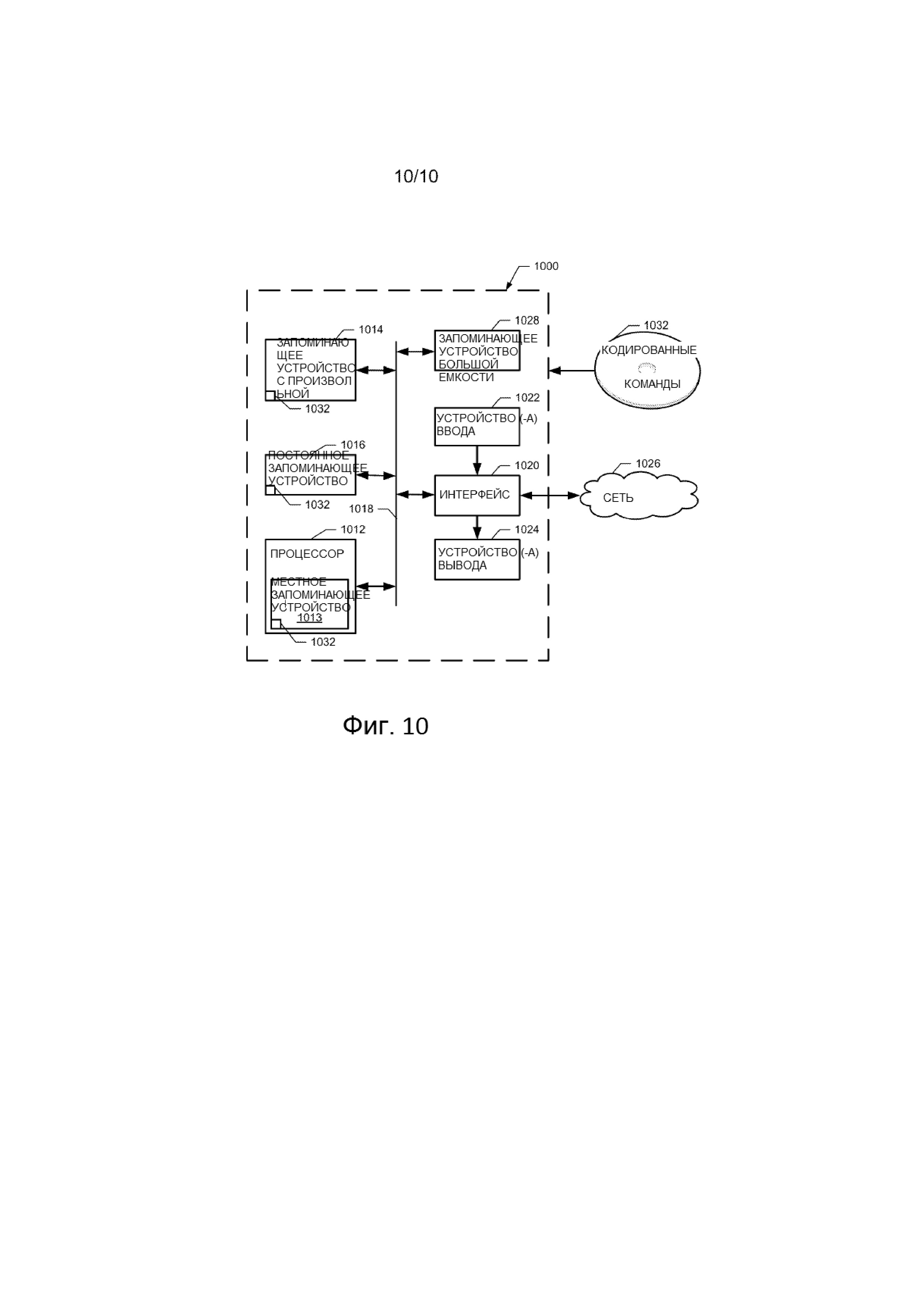
[0014] На ФИГ. 10 представлено схематическое изображение приведенной в качестве примера процессорной платформы, которая может быть применена и/или запрограммирована для осуществления приведенных в качестве примера способов по ФИГ. 5-9 и/или, в более общем плане, для реализации приведенных в качестве примера позиционеров по ФИГ. 2 и/или 3.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0015] В системах управления технологическим процессом нередко имеется множество клапанов, которые находятся в рабочем состоянии в течение длительных периодов времени без изменения положения их элементов регулирования расхода. Например, отсекающий клапан, связанный с автоматизированной системой безопасности (SIS) может оставаться в открытом положении до тех пор, пока не будет перекрыт из-за неисправности в системе. Клапаны, которые большую часть времени находятся в неподвижном состоянии (например, тарелку, пробку или другой элемент регулирования расхода клапана редко перемещают) могут заклиниваться и не функционировать должным образом, когда это необходимо. Таким образом, общая надежность системы зависит от достоверности того, что операторы (и/или инженеры), управляющие системой, обеспечат должное функционирование клапанов, когда в этом возникнет необходимость. Соответственно, существуют известные способы, позволяющие проверять функционирование или испытывать клапаны и/или проверять ход механизма клапанов и/или определять заклинивание клапанов. Например, для клапанов часто проводят процедуру испытания при неполном ходе, при которой клапан перемещают (двигают) на часть интервала его хода, чтобы проверить, может ли клапан еще двигаться или он заклинен. В качестве уточнения отметим, что термины «перемещение» клапана или «движение» клапана, упоминаемые в данном описании, относятся к перемещению или движению тарелки, пробки или другого элемента регулирования расхода клапана внутри клапана. Аналогичным образом, термин «заклиненный» клапан, применяемый в данном описании, относится к элементу регулирования расхода клапана, который становится заклиненным или неспособным двигаться должным образом в ответ на поступление сигнала управления.
[0016] Хотя испытание при неполном ходе является целесообразным вариантом для некоторых клапанов, многие предохранительные клапаны предназначены для перемещения от первого конца хода (например, от полностью открытого положения) до второго конца (например, полностью закрытого положения) настолько быстро, насколько это возможно, при этом клапан должен обязательно оставаться герметично закрытым на втором конце. Для возможности осуществления быстрого и надежного перемещения от одного конца к другому пневматические исполнительные механизмы, применяемые для закрытия отсекающих клапанов, часто содержат относительно сильно предварительно нагруженную пружину с относительно низкой жесткостью пружины. Как правило, отсекающие клапаны удерживают полностью открытыми (например, в штатном режиме эксплуатации) с помощью исполнительного механизма, на который подают полное давление. В таких примерах, как только давление воздуха падает ниже верхнего калибровочного значения клапана и связанной с ним зоны трения, усилие пружины становится достаточным для перемещения клапана в закрытое положение при относительно небольшой величине дальнейшего снижения давления. Другими словами, относительно небольшое изменение давления может приводить к относительно большому изменению положения хода клапана. Таким образом, управление положением хода такого клапана затруднено из-за чувствительности к давлению на входе в пределах разноса калибровочного значения. Кроме того, для выполнения требований по герметичной отсечке во многих случаях клапан может иметь двойное уплотнение и/или включать другие типы герметичных уплотнений, которые создают в клапане сильное трение. Относительно сильное трение в таких клапанах может приводить к скачкообразному движению, при котором движение клапана характеризуется многократным толчковым перемещением, а не ровным, линейным движением. Такое нелинейное движение еще больше осложняет управление положением хода таких клапанов с целью испытания при неполном ходе и/или общего дроссельного управления.
[0017] Указанные выше характеристики некоторых отсекающих клапанов продемонстрированы графически на ФИГ. 1. На ФИГ. 1 представлена приведенная в качестве примера кривая 100 давления, соответствующая управлению ходом типового отсекающего шарового клапана приборной системы безопасности (SIS). В примере, показанном на ФИГ. 1, средняя сплошная линия 102 соответствует давлению, требуемому для преодоления усилия пружины в исполнительном механизме во всем интервале хода клапана при отсутствии трения. Как показано в приведенном примере, клапан имеет калибровочные значения приблизительно от 32 фунт/кв. дюйм (psi) до 42 фунт/кв. дюйм для разноса калибровочных значений приблизительно в 10 фунт/кв. дюйм. Нижняя пунктирная линия 104, показанная на ФИГ. 1, соответствует фактическому давлению, поступающему на исполнительный механизм, когда клапан переводят от первого упорного конца хода (в данном случае соответствует повороту на 95 градусов) ко второму упорному концу хода (0 градусов). Верхняя пунктирная линия 106 соответствует фактическому давлению, поступающему на исполнительный механизм, когда клапан переводят от второго упора обратно к первому упору. Разность давлений между нижней пунктирной линией 104 и средней сплошной линией 102 соответствует одностороннему трению в клапане, когда он перемещается в первом направлении от первого упора (например, 95 градусов) ко второму упору (например, 0 градусов). Разность давлений между верхней пунктирной линией 106 и средней сплошной линией 102 соответствует одностороннему трению в клапане, когда он перемещается во втором направлении от второго упора (например, 0 градусов) к первому упору (например, 95 градусов). Как показано на кривой 100 давления по ФИГ. 1, одностороннее трение в обоих направлениях не постоянно, а изменяется приблизительно на 10 фунт/кв. дюйм или приблизительно на 100% разноса калибровочных значений. Как правило, при нормальных условиях прилагают полное давление (например, 100% от подводимого давления), которое в показанном примере составляет приблизительно 60 фунт/кв. дюйм. Таким образом, в показанном примере клапан, представленный кривой на ФИГ. 1, не начинает движение в первом направлении (из положения поворота на 95 градусов в направлении положения поворота на 0 градусов), пока исполнительный механизм не сбросит давление до приблизительно 32 фунт/кв. дюйм (верхнее калибровочное значение 42 фунт/кв. дюйм за вычетом 10 фунт/кв. дюйм за счет одностороннего трения) и клапан пройдет весь свой интервал хода, когда давление снизится до приблизительно 22 фунт/кв. дюйм (нижнее калибровочное значение 32 фунт/кв. дюйм за вычетом 10 фунт/кв. дюйм за счет одностороннего трения). На обратном пути (перемещаясь из положения поворота на 0 градусов в направлении положения поворота на 95 градусов) клапан, представленный кривой на ФИГ. 1, не начинает движение, пока исполнительный механизм не будет находиться под давлением до приблизительно 42 фунт/кв. дюйм (нижнее калибровочное значение 32 фунт/кв. дюйм плюс 10 фунт/кв. дюйм за счет одностороннего трения) и клапан пройдет весь свой интервал хода, когда давление повысится до приблизительно 52 фунт/кв. дюйм (верхнее калибровочное значение 42 фунт/кв. дюйм плюс 10 фунт/кв. дюйм за счет одностороннего трения). Для сравнения, для клапанов, устанавливаемых в определенное положение, т. е. не только от одного конца к другому (например, дроссельных клапанов, а не двухпозиционных клапанов), требуемый уровень трения (например, одностороннего трения) нередко составляет менее 10% разноса калибровочных значений. Таким образом, значительное трение (для обеспечения герметичности) в клапане, охарактеризованное по ФИГ. 1, и узкий разнос калибровочных значений (для обеспечения быстрого перемещения от одного конца к другому) не позволяют надежно управлять ходом клапана.
[0018] Из-за сильного трения в клапане он не может перемещаться (например, заедает) до тех пор, пока не будет достигнута определенная величина давления для преодоления статического трения (иногда называемого трением покоя) и в этот момент клапан совершит резкое толчковое перемещение или перемещение на небольшое расстояние (например, сдвиг). Такое резкое толчковое перемещение в клапане и исполнительном механизме приводит к резкому изменению объема в исполнительном механизме и, таким образом, к изменению давления. Таким образом, клапан снова будет заедать, пока не будет создано достаточное давление, чтобы клапан снова мог сдвинуться на небольшое расстояние. Это многократное изменение давления и толчковое перемещение клапана представлено на ФИГ. 1 зубцеобразными пиками на нижней и верхней пунктирных линиях 104, 106. Из-за этого скачкообразного движения и общей конструкции двухпозиционных клапанов с высоким коэффициентом трения традиционные способы испытания при неполном ходе, которые требуют установки клапана в положение хода, расположенное между противоположными концами, являются ненадежными.
[0019] В типовом испытании при неполном ходе заданную величину хода для клапана перемещают из ее нормального положения в определенной части интервала хода (например, 10%, 20% и т. д.) в течение определенного периода времени (например, заданную величину изменяют линейно, а не ступенчато), а затем возвращают заданную величину для нормального положения клапана (например, нормального положения перед испытанием при неполном ходе). Например, типовой отсекающий клапан (например, клапан отсечки подачи топлива) обычно работает со 100% ходом (например, полностью открыт) таким образом, что перемещение клапана в ходе испытания при неполном ходе может составлять до 90% хода. В противоположность этому, разгрузочный клапан (например, клапан сброса давления) обычно работает при 0% ходе таким образом, что в ходе испытания при неполном ходе можно перемещать клапан на 10% хода. Когда во время испытания при неполном ходе заданная величина хода линейно изменяется в первом направлении, а затем линейно изменяется во втором направлении, фактический ход клапана рассматривают в качестве обратной связи управления клапаном по следованию заданной величине. Если сигнал ошибки становится слишком большим (например, фактический ход клапана не соответствует заданной величине), то испытание прерывают и выдается сигнал тревоги о заклинивании клапана. Однако, как описано выше, некоторые двухпозиционные клапаны не всегда перемещаются сразу же при изменении заданной величины (даже в случае изменения внутреннего состояния (например, давления)) из-за высокого уровня трения и скачкообразного движения. Другими словами, клапаны с высоким коэффициентом трения не предназначены для следования линейно изменяющейся заданной величине хода, поскольку они не предназначены для управления ходом. Таким образом, позиционер может быть не в состоянии отличить клапан, который начинает движение от упора, от клапана, который фактически заклинен. Кроме того, когда клапан заклинен, он не перемещается. При отсутствии перемещения клапана отсутствует обратная связь по ходу для управления клапаном, при этом система фактически становится управляемой системой без обратной связи, а внутренние состояния могут достигать предельных значений и происходит интегральное насыщение. Современные подходы позволяют преодолеть эту проблему путем определения порога, выше которого давление не может подниматься, перед прерыванием испытания при неполном ходе, при этом заданная величина возвращается в свое нормальное состояние и выдается сигнал тревоги о заклинивании клапана. Однако эти современные решения могут быть недостаточными для критических систем (например, многих отсекающих клапанов, связанных с автоматизированными системами безопасности), в которых необходимо обеспечивать систему управления клапаном с обратной связью. В известных решениях, основанных на управлении ходом, управление фактически не имеет обратной связи, так что внутренние состояния (например, давление) неизвестны и могут достигать предельных значений, если клапан, подвергаемый испытанию, заклинен. В таких случаях, если увеличенный крутящий момент исполнительного механизма преодолевает силу трения в клапане, клапан может высвобождаться и начинать перемещаться. В таких случаях, позиционер может полностью сбрасывать давление в исполнительном механизме, а не осуществлять изменение направления потока, приводящее к ложному аварийному отключению, при котором клапан полностью закрывается и вызывает непреднамеренное отключение. Благодаря регулированию давления, описанному в настоящем документе, управление системой осуществляют с обратной связью, так что вероятность возникновения таких непреднамеренных ситуаций снижается.
[0020] Наряду с проблемами управления ходом двухпозиционных клапанов с высоким коэффициентом трения, описанными выше в связи с осуществлением испытания при неполном ходе, аналогичные проблемы возникают и в других ситуациях, когда требуется дроссельное управление клапаном (например, управление клапаном в зависимости от положения хода между конечными точками интервала хода). Например, для надежного управления пневматическим исполнительным механизмом с помощью позиционера необходимо откалибровать позиционер. В некоторых примерах, позиционер содержит преобразователь силы тока в давление (I/P) для преобразования электрического входного сигнала в сигнал давления, который приводит в действие реле для создания выходного давления, соответствующего входному сигналу. Для надлежащего управления исполнительным механизмом I/P-преобразователь и реле должны быть сбалансированы или откалиброваны. Калибровка обычно предполагает определение номинального или начального I/P-смещения, которое включают в сигнал управления и которое регулирует значение до конечного откалиброванного I/P-смещения, которое обнуляет позиционер. В некоторых примерах номинальное или начальное I/P-смещение может быть аппроксимировано на основании технологических условий. Однако точное значение I/P-смещения для позиционера чувствительно к условиям (например, температуре, подводимому давлению и т. д.), в которых применяют позиционер, и, таким образом, I/P-смещение обычно калибруют при установке в месте эксплуатации. Кроме того, калибровку выполняют в месте эксплуатации, чтобы получить максимально точное значение I/P-смещения, так как даже небольшая ошибка значения I/P-смещения может повлиять на управление клапаном, особенно, если клапан представляет собой клапан с высоким коэффициентом трения с узким разносом калибровочных значений, поскольку небольшие изменения давления могут приводить к значительным изменениям хода. В некоторых решениях I/P-смещение калибруют, начиная с номинального или начального I/P-смещения, определяют заданную величину хода (как правило, 50% от интервала хода) и приводят в движение клапан с заданной величиной хода. В таких примерах, поскольку клапаном управляют для достижения заданной величины, интегратор позиционера интегрально насыщается до тех пор, пока не будет достигнута заданная величина. Если номинальное I/P-смещение откалибровано должным образом, значение накопленной погрешности для интегратора должно быть равно нулю. Таким образом, если аккумулятор не установлен в ноль, соответствующее значение добавляют к номинальному I/P-смещению для определения конечного или калиброванного I/P-смещения, а затем сбрасывают интегратор или возвращают его в исходное состояние (например, устанавливают аккумулятор в ноль).
[0021] Таким образом, способ калибровки позиционера основывается на управлении ходом клапана, которое, как описано выше, является проблематичным для клапанов с высоким коэффициентом трения. В контексте калибровки I/P-смещения, поскольку такие клапаны перемещают к заданной величине 50%, клапан периодически заедает из-за трения. В результате этого, интегратор слишком сильно интегрально насыщается таким образом, что, когда клапан в конечном итоге сдвигается и достигает заданной величины, значение аккумулятора не соответствует значению, которое фактически требуется для корректирования начальной или номинальной оценки I/P-смещения. В зависимости от конца, от которого элемент регулирования расхода клапана приближается к заданной величине в 50% (например, от 0% конца или от 100% конца), конечное I/P-смещение, получаемое при помощи способа, может существенно различаться, и, таким образом, является недостоверным. Кроме того, в некоторых ситуациях, скачкообразное движение может приводить к заеданию клапана до достижения заданной величины, а затем проскакиванию или превышению заданной величины и ее превышению на обратном пути, так что клапан ограничивает циклы и не приближается к заданной величине для обеспечения возможности калибровки I/P-смещения.
[0022] Примеры, описанные в данном документе, позволяют преодолеть вышеуказанные проблемы осуществления испытания при неполном ходе путем реализации приведенных в качестве примера позиционеров, сконструированных в соответствии с раскрытыми здесь идеями, для управления клапанами на основании обратной связи, соответствующей давлению, поступающему на исполнительный механизм, а не на основании хода клапана. Другими словами, раскрыты примеры реализации регулирования давления, а не традиционного управления ходом. Таким образом, скачкообразное перемещение клапана, а также другие проблемы, связанные с потерей хода (например, связывание грязью), теперь не влияют на обратную связь управления. Таким образом, в раскрытых примерах достижим более высокий коэффициент усиления без нарушения устойчивости системы. Кроме того, система управления позиционеров, реализуемая в соответствии с идеями, раскрытыми в данном документе, никогда не станет системой без обратной связи, а напротив, останется системой с обратной связью, так что риск потери контроля за внутренними состояниями полностью отсутствует. В некоторых примерах при реализации регулирования давления ход контролируют (например, применяют обратную связь хода), но обратную связь хода не применяют для управления. В некоторых примерах позиционер сконструирован с возможностью реализации каскадного контура управления, в котором первичный контур основан на регулировании давления, а супервизорный контур основан на управлении ходом. В частности, раскрыты способы выполнения испытания при неполном ходе на основании регулирования давления.
[0023] Кроме того, раскрыты способы калибровки I/P-смещения в приведенных в качестве примера позиционерах с применением регулирования давления. В некоторых примерах I/P-смещение калибруют, когда исполнительный механизм находится на упоре (например, когда клапан полностью открыт или полностью закрыт). Когда исполнительный механизм находится на упоре, объем в нем фиксирован, поскольку исполнительный механизм не движется. Таким образом, исполнительный механизм не совершит резкое толчковое перемещение (например, из-за скачкообразного перемещения клапана), вследствие чего резко изменяется объем в исполнительном механизме, что приводит к соответствующему резкому изменению давления. Таким образом, система не превысит заданную величину и не будет происходить чрезмерное интегральное насыщение, как в известном решении, описанном выше. Напротив, будет достигнуто точное приближение системы к заданной величине в отсутствие указанных проблем и, таким образом, обеспечена возможность достоверной калибровки I/P-смещения. В других примерах I/P-смещение калибруют на основании заданной величины давления, соответствующей положению хода между конечными точками хода.
[0024] Помимо описанных способов реализации испытания при неполном ходе и калибровки для общего дроссельного управления клапанами может быть реализовано регулирование на основе давления. В некоторых примерах позиционер можно переключать между управлением ходом (т. e. применением обратной связи хода или положения клапана) и регулированием давления (т. e. применением обратной связи выходного давления) согласно настоящему описанию. В некоторых примерах позиционер может осуществлять регулирование давления, когда направление перемещения клапана сначала реверсируют для облегчения прохождения зоны трения, которая, как было отмечено выше в отношении ФИГ. 1, может составлять 100% или более разноса калибровочных значений для клапанов с высоким коэффициентом трения. Таким образом, для контура управления всегда применяют обратную связь (например, по давлению на выходе) для обеспечения функционирования системы управления с обратной связью при таком реверсировании, чтобы он не стал по существу управляемой системой без обратной связи, когда клапан не перемещается (и, таким образом, не обеспечивается обратная связь хода или положения клапана) из-за трения. Кроме того, выполнение регулирования давления при реверсивном перемещении клапана уменьшает (например, минимизирует) общую зону нечувствительности контроллера хода.
[0025] Хотя примеры, описанные в данном документе, преимущественно раскрыты в контексте обеспечения безопасности двухпозиционных отсекающих клапанов, раскрытые в данном документе идеи не ограничиваются ними. Напротив, описанное в настоящем документе регулирование давления может быть реализовано для любого типа клапана: двухпозиционного или дроссельного. В более общем смысле, вышеуказанные проблемы (например, сильное трение) могут возникнуть в клапане любого типа и, таким образом, для их решения могут быть применены раскрытые в данном документе идеи. Например, в клапанах, в которых применяют графитовую набивку и/или уплотнение «металл к металлу», может возникать сильное трение и, таким образом, на них можно проверить возможность решения проблем, связанных со скачкообразным движением, описанных выше. В качестве некоторых конкретных примеров, регулирование давления может быть успешно реализовано в отсекающих клапанах, клапанах управления перепуском воздуха на турбине, клапанах антипомпажной защиты и/или низкотемпературных клапанах управления. Кроме того, клапаны с низким коэффициентом трения в ходе эксплуатации могут срабатываться, при этом уровень трения в клапане увеличивается, что вызывает те же проблемы, что и в клапанах с высоким коэффициентом трения.
[0026] На ФИГ. 2 представлено схематическое изображение приведенного в качестве примера позиционера 200, сконструированного в соответствии с идеями, описанными в настоящем документе. Приведенный в качестве примера позиционер 200 содержит приведенный в качестве примера микропроцессор 202, преобразователь 204 силы тока в давление (I/P-преобразователь, ) и реле 206. В показанном примере микропроцессор 202 выполнен с возможностью управления исполнительным механизмом 208, соединенным с клапаном 210, на основании электрического входного сигнала (например, заданной величины 212 давления) и обратной связи 214, соответствующей выходному давлению, подаваемому на исполнительный механизм 208. В частности, приведенный в качестве примера микропроцессор 202 приведенного в качестве примера позиционера 200 осуществляет пропорционально-интегрально-дифференциальное регулирование (PID) выходного давления. Как показано в приведенном примере, микропроцессор 202 содержит цепь 216 пропорционального или прямого усиления, интегратор 218 и компенсатор 220 производной по давлению, которые применяют в сочетании с заданной величиной 212 давления и обратной связью 214 выходного давления для генерирования сигнала, который управляет I/P-преобразователем 204. Этот контур управления с обратной связью в данном документе упоминается как контур регулирования давления или контроллер 215 давления. В некоторых примерах, как показано на фигурах, компенсатор 220 производной работает в цепи обратной связи контроллера 215 давления, а не в прямой цепи, для сглаживания заданной величины 212 давления. В показанном примере микропроцессор 202 сохраняет значение I/P-смещения 222, применяемое для балансировки приведенного в качестве примера позиционера 200. В показанном примере I/P-смещение 222 добавляют к сигналу управления для I/P-преобразователя 204, чтобы компенсировать сигнал, соответствующий нулевому положению приведенного в качестве примера позиционера 200.
[0027] В показанном примере позиционер 200 принимает подводимое давление, которое направляют через I/P-преобразователь 204, чтобы подать входное давление на реле 206, которое пропорционально сигналу управления, генерируемому микропроцессором 202. В некоторых примерах реле 206 принимает входное давление от I/P-преобразователя 204 для формирования пропорционального выходного давления (или течения), применяемого для управления исполнительным механизмом 208. В некоторых примерах исполнительный механизм 208 представляет собой исполнительный механизм одностороннего действия с пружинным возвратом. В некоторых примерах вместо реле 206 применяют золотниковый клапан. Приведенная в качестве примера реализация такого золотникового клапана описана в заявке на патент США с серийным номером 14/075,804, поданной 8 ноября 2013 года, которая полностью включена в настоящее описание посредством ссылки. Как показано в приведенном примере, обратная связь 214 выходного давления соответствует давлению, создаваемому реле 206 для управления исполнительным механизмом 208. Таким образом, позиционер 200 может осуществлять управление клапаном 210 на основании давления в отличие от других известных позиционеров, в которых применяют обратную связь по положению, соответствующему ходу или перемещению клапана 210.
[0028] При этом в приведенном в качестве примера способе реализации приведенного в качестве примера микропроцессора 202 приведенного в качестве примера позиционера 200 по ФИГ. 2, показанного на ФИГ. 2, один или большее элементов, способов и/или устройств, показанных на ФИГ. 2, могут быть объединены, разделены, перегруппированы, опущены, исключены и/или реализованы любым другим способом. Кроме того, приведенная в качестве примера цепь 216 прямого усиления, приведенный в качестве примера интегратор 218, приведенный в качестве примера компенсатор 220 производной по давлению и/или, в более общем плане, приведенный в качестве примера микропроцессор 200 по ФИГ. 2 могут быть реализованы с помощью аппаратного обеспечения, программного обеспечения, встраиваемого программного обеспечения и/или любой комбинации аппаратного обеспечения, программного обеспечения и/или встраиваемого программного обеспечения. Таким образом, например, любое из приведенной в качестве примера цепи 216 прямого усиления, приведенного в качестве примера интегратора 218, приведенного в качестве примера компенсатора 220 производной по давлению и/или, в более общем плане, приведенного в качестве примера микропроцессора 200 может быть реализовано с помощью одной (или большего количества) аналоговой или цифровой схемы (схем), логических схем, программируемого процессора (-ов), специализированной интегральной схемы (схем) (ASIC), программируемого логического устройства (устройств) (PLD) и/или логической схемы (схем) с эксплуатационным программированием (FPLD). При считывании данных с любого из устройств или систем, заявленных в этом патенте, для полного охвата реализации программного обеспечения и/или встроенного программного обеспечения по меньшей мере одно из приведенной в качестве примера цепи 216 прямого усиления, приведенного в качестве примера интегратора 218, приведенного в качестве примера компенсатора 220 производной по давлению, как это явным образом определено в настоящем документе, включает материальное устройство хранения данных или дисковое устройство хранения данных, пригодное для ввода в вычислительную машину, например, запоминающее устройство, цифровой универсальный диск (DVD), компакт-диск (CD), диск Blu-ray и т. д. для хранения программного обеспечения и/или встроенного программного обеспечения. Более того, приведенный в качестве примера микропроцессор 202 по ФИГ. 2 может включать один или большее количество элементов, способов и/или устройств в дополнение к элементам, способам и/или устройствам, которые показаны на ФИГ. 2, или вместо них и/или может включать более одного любого из показанных элементов, способов и устройств или их все.
[0029] На ФИГ. 3 представлено схематическое изображение другого приведенного в качестве примера позиционера 300, сконструированного в соответствии с идеями, описанными в настоящем документе. Приведенный в качестве примера позиционер 300 по ФИГ. 3 представляет собой позиционер, аналогичный позиционеру 200 по ФИГ. 2, за исключением того, что контур или контроллер 215 регулирования давления, описанный по ФИГ. 2, в приведенном в качестве примера позиционере 300 по ФИГ. 3 является каскадным и включает супервизорный контур управления ходом или контроллер 304 хода. В частности, приведенный в качестве примера позиционер 300 согласно ФИГ. 2 включает микропроцессор 302, который содержит цепь 216 прямого усиления, интегратор 218, компенсатор 220 производной по давлению и I/P-смещение 222 и генерирует сигнал управления для I/P-преобразователя 204. Как и в приведенном в качестве примера позиционере 200 по ФИГ. 2, I/P-преобразователь 204 в примере, показанном на ФИГ. 3, создает сигнал давления для реле 206 для создания выходного давления для управления исполнительным механизмом 208 и клапаном 210. Кроме того, как и в примере по ФИГ. 2, в приведенном в качестве примера позиционере 300 на ФИГ. 3 выходное давление от реле 206 соответствует обратной связи 214, сравниваемой с заданной величиной 212 давления для определения ошибки, которая служит основой для формирования сигнала управления для I/P-преобразователя 204 с целью дальнейшего приближения выходного давления к заданной величине.
[0030] Однако в отличие от приведенного в качестве примера позиционера 200 по ФИГ. 2 приведенный в качестве примера позиционер 300 по ФИГ. 3 содержит контроллер 304 хода и ограничитель 306 для реализации супервизорного контура управления. В показанном примере заданную величину 308 хода объединяют с обратной связью 310, соответствующей ходу или положению клапана 210. В некоторых примерах обратную связь 310 по положению хода обеспечивают с помощью датчика 312 положения, соединенного с клапаном 210. В некоторых примерах датчик 312 положения встраивают в позиционер 300. С помощью заданной величины 308 хода и обратной связи 310 по положению хода приведенный в качестве примера контроллер 304 хода и ограничитель 306 генерируют заданную величину 212 давления, которую передают в контур 215 регулирования давления, как это описано выше. Логика, реализованная в контроллере 304 хода, может представлять собой любую подходящую логику. Например, контроллер 304 хода может обеспечивать логику включения/выключения для изменения заданной величины 212 давления во время выполнения испытания при неполном ходе на основании обратной связи 310 от датчика 312 положения. Другими словами, в некоторых примерах контроллер 304 хода выдает первый сигнал (например, сигнал включения) для начала осуществления испытания при неполном ходе, который определяет заданную величину 212 давления, которая будет управлять I/P-преобразователем 204 для перемещения клапана 210. В некоторых таких примерах, как только датчик 312 положения определяет движение (например, пороговый уровень перемещения), контроллер 304 хода выдает второй сигнал (например, сигнал выключения), который изменяет заданную величину 212 давления для управления I/P-преобразователем 204 обратно к начальному состоянию. В некоторых примерах эта функциональность включения/выключения или фиксации контроллера 304 хода переключается, когда обратная связь 310 положения хода указывает на то, что клапан 210 переместился в определенное местоположение, например, в целевое положение хода. В некоторых примерах целевое положение хода соответствует заданной величине 308 хода. В некоторых примерах целевое положение хода находится на некотором расстоянии в пределах целевой заданной величины 308 хода (по отношению к начальному положению клапана 210) для обеспечения того, что клапан 210 пройдет мимо целевого положения хода во время испытания при неполном ходе, в качестве основания для подтверждения того, что клапан 210 функционирует должным образом или заклинен. В других примерах в контроллере 304 хода реализуют более сложную программу управления, аналогичную более традиционному контроллеру хода, за исключением функции контроля контроллера хода в отношении каскадного контроллера 215 давления. В некоторых примерах позиционер 300 по ФИГ. 3 применяют для управления поршневым исполнительным механизмом, который не содержит пружинный возврат.
[0031] В показанном примере ограничитель 306 изменяет сигнал, принятый от контроллера 304 хода, чтобы сгенерировать соответствующую заданную величину 212 давления, которую передают на контроллер 215 давления. В некоторых примерах ограничитель 306 преобразует ступенчатый входной сигнал от контроллера 304 хода в пилообразный сигнал. Например, сигналы включения/выключения, генерируемые контроллером 304 хода, описанным выше, могут соответствовать заданным величинам давления, которые приводят I/P-преобразователь 204 к точкам отсечки (например, 0% для разгрузки исполнительного механизма 208 и 100% для наполнения исполнительного механизма 208). Соответственно, во время испытания при неполном ходе заданная величина 308 хода может быть установлена на 80% для проверки движения клапана в штатном режиме в положении, соответствующем 100% интервала хода клапана, в результате чего контроллер 304 хода генерирует сигнал для приведения I/P-преобразователя 204 в точку 0%. Однако предоставление такой заданной величины ступенчатого входного давления, которая находится на противоположном от начальных условий конце диапазона давления, не будет эффективным входным сигналом для испытания при неполном ходе. Соответственно, в некоторых примерах ограничитель 306 преобразует ступенчатый входной сигнал в линейно изменяющуюся заданную величину путем определения скорости изменения заданной величины давления (например, -1 фунт/кв. дюйм/с) для поддержания управления системой на основании регулирования давления. В некоторых из таких примеров, когда будет достигнуто целевое положение хода (85% от интервала хода (например, 5% относительно заданной величины 308 хода в данном примере)), контроллер 304 хода генерирует новый сигнал, чтобы вернуть клапан в точку 100%. В некоторых примерах ограничитель 306 преобразует этот новый сигнал в аналогичную линейно изменяющуюся заданную величину давления, описанную выше, но в противоположном направлении, чтобы вернуть давление к стартовым или начальным условиям. В некоторых примерах вместо преобразования ступенчатых сигналов в линейно изменяющиеся сигналы ограничитель 306 устанавливает пределы для диапазона значений заданных величин давления, чтобы по меньшей мере уменьшить большие ступенчатые сигналы.
[0032] Дополнительно или альтернативно, в некоторых примерах ограничитель 306 определяет верхний и нижний пороги давления для прекращения испытания при неполном ходе, когда обратная связь 310 положения хода указывает на то, что клапан 210 не осуществляет движение (например, из-за заклинивания клапана) и/или включает предупреждающий сигнал, указывающий на то, что клапан 210 не прошел испытание при неполном ходе. Например, если клапан 210 заклинен во время сброса давления (при скорости, определяемой ограничителем 306) таким образом, что обратная связь 310 положения хода не указывает на достижение целевого положения хода (85% в данном примере), контроллер 215 давления продолжит снижать давление путем регулирования давления на основании линейно изменяющейся заданной величины давления. Однако в некоторых примерах ограничитель 306 определяет нижний порог давления или порог давления хода, ниже которого ограничитель 306 автоматически реверсирует заданную величину 212 давления, чтобы остановить ход клапана 210 и начать обратное линейное изменение заданной величины 212 давления до начальных условий. Соответственно, когда сигнал обратной связи 214 выходного давления проходит нижний порог давления, микропроцессор 302 генерирует сигнал тревоги при отказе клапана, который указывает на заклинивание клапана, и возвращает давление к нормальным (например, начальным) условиям. В некоторых примерах клапан 210 перемещается в требуемое целевое положение хода, но заклинивается, когда давление линейно изменяется обратно для возврата клапана 210 в нормальных условиях эксплуатации. Такая ситуация может быть обнаружена, если сигнал обратной связи 214 выходного давления превышает соответствующий верхний порог давления или порог возвратного давления, определяемый приведенным в качестве примера ограничителем 306, когда обратная связь 310 положения хода указывает на то, что клапан 210 не вернулся к соответствующему упору (например, 100% хода или в пределах минимального порогового перемещения от 100% хода).
[0033] При этом в приведенном в качестве примера способе реализации приведенного в качестве примера микропроцессора 302 приведенного в качестве примера позиционера 300 по ФИГ. 3, показанного на ФИГ. 3, один или большее элементов, способов и/или устройств, показанных на ФИГ. 3, могут быть объединены, разделены, перегруппированы, опущены, исключены и/или реализованы любым другим способом. Кроме того, приведенная в качестве примера цепь 216 прямого усиления, приведенный в качестве примера интегратор 218, приведенный в качестве примера компенсатор 220 производной по давлению и/или, в более общем плане, приведенный в качестве примера микропроцессор 302 по ФИГ. 3 могут быть реализованы с помощью аппаратного обеспечения, программного обеспечения, встраиваемого программного обеспечения и/или любой комбинации аппаратного обеспечения, программного обеспечения и/или встраиваемого программного обеспечения. Таким образом, например, любое из приведенной в качестве примера цепи 216 прямого усиления, приведенного в качестве примера интегратора 218, приведенного в качестве примера компенсатора 220 производной по давлению и/или, в более общем плане, приведенного в качестве примера микропроцессора 302 может быть реализовано с помощью одной (или большего количества) аналоговой или цифровой схемы (схем), логических схем, программируемого процессора (-ов), специализированной интегральной схемы (схем) (ASIC), программируемого логического устройства (устройств) (PLD) и/или логической схемы (схем) с эксплуатационным программированием (FPLD). При считывании данных с любого из устройств или систем, заявленных в этом патенте, для полного охвата реализации программного обеспечения и/или встроенного программного обеспечения по меньшей мере одно из приведенной в качестве примера цепи 216 прямого усиления, приведенного в качестве примера интегратора 218, приведенного в качестве примера компенсатора 220 производной по давлению, как это явным образом определено в настоящем документе, включает материальное устройство хранения данных или дисковое устройство хранения данных, пригодное для ввода в вычислительную машину, например, запоминающее устройство, цифровой универсальный диск (DVD), компакт-диск (CD), диск Blu-ray и т. д. для хранения программного обеспечения и/или встроенного программного обеспечения. Более того, приведенный в качестве примера микропроцессор 302 по ФИГ. 3 может включать один или большее количество элементов, способов и/или устройств в дополнение к элементам, способам и/или устройствам, которые показаны на ФИГ. 3, или вместо них и/или может включать более одного любого из показанных элементов, способов и устройств или их все.
[0034] На ФИГ. 4 представлены графики 400, 402, 404, 406, изображающие соответствующие приведенные в качестве примера кривые 408, 410, 412, 414 профиля волны давления для клапанов, подвергаемых приводимому в качестве примера испытанию при неполном ходе, описанному в настоящем документе. Кривая 408 профиля волны на первом графике 400 соответствует правильно функционирующему клапану, подвергаемому испытанию при неполном ходе, управляемому одним из позиционеров 200, 300, описанных выше. В показанном примере начальное давление (например, давление при нормальных условиях эксплуатации), подаваемое на клапан, составляет 60 фунт/кв. дюйм, а начальное положение клапана представляет собой точку, соответствующую 100% интервала хода (например, клапан находится на упоре, соответствующем конечной точке высокого давления интервала хода). В некоторых примерах начальное давление соответствует 100% подводимого давления. В некоторых примерах начальное давление может быть меньшим, чем полное подводимое давление. Во время проведения испытания при неполном ходе в некоторых примерах контроллер 215 давления регулирует давление, приводящее в действие клапан, для следования заданной величине, которое линейно снижается от начального значения давления. Для правильно функционирующего клапана, как показано на первом графике 400 на ФИГ. 4, когда давление снижается, клапан будет оставаться в положении на упоре до тех пор, пока давление не опустится ниже верхнего калибровочного значения давления (определяется нагрузкой, создаваемой пружиной) и уменьшится за пределами зоны трения. В показанном примере, когда контроллер 215 давления снижает давление за пределами зоны трения, клапан перемещается от положения хода 100%. Для целей объяснения направление перемещения клапана от начального положения клапана упоминается как направление хода, связанное с испытанием при неполном ходе. На графике 400, представленном в качестве примера на ФИГ. 4, давление продолжает снижаться, а клапан продолжает движение до тех пор, пока не достигнет целевого положения 416 хода. В некоторых примерах целевое положение 416 хода соответствует положению во всем интервале хода, при котором позиционер 200, 300 определяет, что клапан успешно прошел испытание при неполном ходе в направлении хода. Целевое положение 416 хода может представлять собой любое соответствующее положение во всем интервале хода (например, 10%, 20%, 30% от начального положения). В представленном примере целевое положение 416 хода отличается от целевой заданной величины хода, поскольку, как показано на первом графике 400, клапаном управляют таким образом, чтобы он проходил целевое положение 416 хода.
[0035] В некоторых примерах достижение клапаном целевого положения 416 хода (свидетельствующее о том, что клапан не заклинен в направлении хода) обуславливает переключение или реверсирование линейного изменения заданной величины давления для контроллера 215 давления таким образом, что давление изменяется обратно к начальным условиям и, таким образом, возврат клапана в начальное положение (например, на упоре). По мере повышения давления на этом обратном пути клапан сначала остается в том же положении, а когда давление проходит через зону трения, в этот момент клапан перемещается обратно в направлении своего начального положения (например, к упору на 100% хода). Для целей объяснения направление перемещения клапана в направлении начального положения клапана упоминается как обратное направление, связанное с испытанием при неполном ходе. На графике 400, представленном в качестве примера на ФИГ. 4, контроллер 215 давления продолжает повышать давление, а клапан продолжает перемещаться в обратном направлении до тех пор, пока клапан не вернется в начальное положение, привязанное у упору. В некоторых примерах контроллер 215 давления продолжает повышать давление до тех пор, пока давление не вернется к начальным условиям (например, будет составлять 100% подводимого давления). В некоторых примерах позиционер 200, 300 определяет, что клапан успешно прошел испытание при неполном ходе в обратном направлении, когда клапан пройдет уровень минимального порогового перемещения 418 (т. е. 5% интервала хода от калиброванного положения упора клапана). Минимальное пороговое перемещение 418 позволяет позиционеру учитывать любые ошибки в контролируемом положении хода, возникающие, например, вследствие потери хода между исполнительным механизмом и штоком клапана, потери хода между штоком клапана и элементом регулирования расхода клапана и/или закручивания штока клапана.
[0036] Кривые 410, 412, 414 профиля волны на втором, третьем и четвертом графиках 402, 404, 406 по ФИГ. 4 соответствуют различным режимам отказа клапана, подвергаемого такому же испытанию при неполном ходе, которое описано для первого графика 400. Вторая кривая 410, показанная на графике 402, соответствует клапану, который полностью заклинен таким образом, что клапан остается в положении на упоре (например, 100% хода), когда давление снижается от начального значения (например, полного подводимого давления) до нулевого значения. В некоторых примерах положение клапана может отчасти изменяться, когда давление снижается до нуля. Однако в некоторых примерах, если положение клапана все еще находится в пределах минимального порогового перемещения 418, позиционер 200, 300 может определять, что клапан не переместился от упора, поскольку изменение положения хода может соответствовать потере хода. В некоторых примерах позиционеры 200, 300 определяют нижний порог давления или порог давления хода 420, чтобы ограничить значение или диапазон заданной величины давления, управляющей контроллером 215 давления в направлении хода. Например, если позиционер 200, 300 определяет, что значение давления прошло порог 420 давления хода, позиционер 200, 300 может прервать испытание при неполном ходе и сгенерировать сигнал тревоги, указывающий на то, что клапан заклинен, и/или свидетельствующий об отказе клапана во время проведения испытания при неполном ходе. Таким образом, давление не снижается вплоть до нулевого давления, как показано на кривой 410. В некоторых примерах, когда позиционер 200, 300 определяет, что значение давления прошло порог 420 давления хода, контроллер 215 давления устанавливает давление обратно к начальному состоянию, которое имело место перед началом испытания при неполном ходе.
[0037] Третья кривая 412, показанная на графике 404, соответствует клапану, который сначала перемещается от упора (например, перемещается за пределы уровня минимального порогового перемещения 418), но заклинивается при движении в направлении хода перед достижением целевого положения 416 хода таким образом, что продолжающееся снижение давления не приводит к дальнейшему движению клапана. В некоторых примерах, если позиционер 200, 300 определяет, что значение давления прошло порог 420 давления хода, позиционер 200, 300 может прервать испытание при неполном ходе и сгенерировать сигнал тревоги, указывающий на то, что клапан заклинен в направлении хода, и/или свидетельствующий об отказе клапана во время проведения испытания при неполном ходе в направлении хода. В некоторых примерах, когда позиционер 200, 300 определяет, что значение давления прошло порог 420 давления хода, контроллер 215 давления устанавливает давление обратно к начальному состоянию, которое имело место перед началом испытания при неполном ходе. В некоторых примерах клапан может возвращаться в начальное положение, как это показано в приведенном примере. Соответственно, в некоторых примерах в клапане может присутствовать некоторое движение. Однако, поскольку клапан не может быть установлен в целевое положение хода, позиционер 200, 300 все же может указывать, что клапан заклинен (например, клапан не прошел испытание при неполном ходе).
[0038] Четвертая кривая 414, показанная на графике 406, соответствует клапану, который успешно проходит испытание при неполном ходе в направлении хода таким же образом, что и правильно функционирующий клапан, описанный по первому графику 400. Однако, как показано на четвертой кривой 414, когда давление возрастает обратно до начальных условий, клапан заклинивается перед возвращением к упору (например, до достижения уровня минимального порогового перемещения 418) таким образом, что продолжающееся повышение давления не приводит к дальнейшему перемещению клапана. В некоторых примерах позиционеры 200, 300 определяют верхний порог давления или порог 422 возвратного давления и выдают предупреждение, указывающее на то, что клапан не прошел испытание при неполном ходе и что клапан заклинен в обратном направлении. В некоторых примерах в отличие от порога 420 давления хода, который может выступать в качестве предела величины давления, порог 422 возвратного давления обуславливает только выдачу сигнала тревоги или предупреждения. В таких примерах контроллер 215 давления продолжает регулировать давление обратно к начальным условиям. В некоторых примерах, как показано на ФИГ. 4, порог 422 возвратного давления применяют только тогда, когда положение клапана выходит за пределы минимального порогового перемещения 418. Таким образом, если клапан перемещается в обратном направлении к уровню минимального порогового перемещения 418 (что указывает на то, что клапан успешно возвращается к упору), продолжающееся повышение давления обратно к начальному состоянию (выше порога возвратного давления) не приведет к неправильной выдаче предупреждения, указывающего на заклинивание клапана.
[0039] На ФИГ. 5-7 показаны блок-схемы, представляющие приведенные в качестве примера способы реализации приведенных в качестве примера позиционеров 200, 300 по ФИГ. 2 и/или 3 для калибровки I/P-смещения 222. В этом примере эти способы могут быть реализованы в виде машиночитаемых команд, которые содержат программу для выполнения процессором, например, процессором 1012, показанным в приведенной в качестве примера процессорной платформе 1000, обсуждаемой ниже в отношении ФИГ. 10. Эта программа может быть реализована в программном обеспечении, хранимом на материальном машиночитаемом носителе данных, таком как CD-ROM, гибкий диск, жесткий диск, цифровой универсальный диск (DVD), диск Blu-ray или запоминающее устройство, связанном с процессором 1012, но всю программу и/или ее часть альтернативно может выполнять устройство, отличное от процессора 1012, и/или она может быть воплощена во встраиваемом программном обеспечении или специализированном аппаратном обеспечении. Кроме того, хотя приведенная в качестве примера программа описана со ссылкой на блок-схемы, показанные на ФИГ. 5-7, альтернативно могут быть применены многие другие способы реализации приведенных в качестве примера позиционеров 200, 300. Например, может быть изменен порядок выполнения блоков и/или некоторые из описанных блоков могут быть изменены, исключены или объединены.
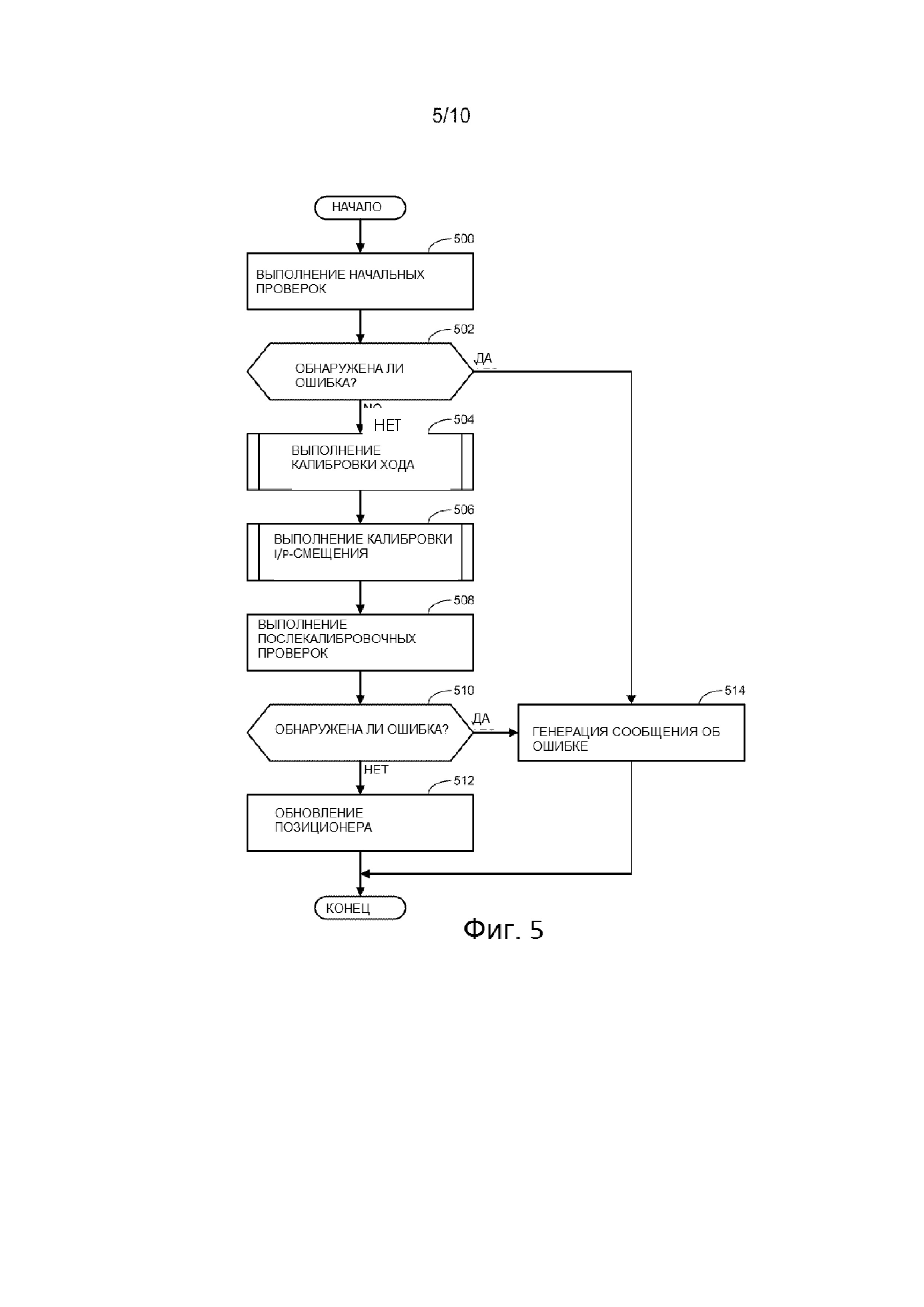
[0040] Согласно ФИГ. 5-7, выполнение приведенного в качестве примера способа начинается на этапе 500, на котором микропроцессор 202, 302 выполняет начальные проверки. В некоторых примерах начальные проверки включают проверку подводимого давления, подтверждение соответствующих режимов прибора, проверку отказов датчика и т. д. На этапе 502 приведенный в качестве примера микропроцессор 202, 302 определяет, были ли обнаружены какие-либо ошибки (например, во время начальных проверок). Если приведенный в качестве примера микропроцессор 202, 302 определяет, что была обнаружена ошибка, управление переходит к этапу 514, на котором приведенный в качестве примера микропроцессор 202, 302 генерирует сообщение об ошибке, после чего приведенный в качестве примера способ по ФИГ. 5 заканчивается. Если приведенный в качестве примера микропроцессор 202, 302 определяет, что ошибки не обнаружены, управление переходит к этапу 504, на котором приведенный в качестве примера микропроцессор 202, 302 выполняет калибровку хода. Более подробное описание калибровки хода (этап 504) приведено ниже со ссылками на ФИГ. 6. На этапе 506 приведенный в качестве примера микропроцессор 202, 302 выполняет калибровку I/P-смещения. Более подробное описание калибровки I/P-смещения (этап 506) приведено ниже со ссылками на ФИГ. 7. На этапе 508 микропроцессор 202, 302 выполняет послекалибровочные проверки. В некоторых примерах послекалибровочные проверки позволяют определить, достоверны ли калиброванные значения и/или обнаружены ли какие-либо ошибки или отказы, для завершения выполнения калибровки хода или калибровки I/P-смещения. На этапе 510 приведенный в качестве примера микропроцессор 202, 302 определяет, были ли обнаружены какие-либо ошибки (например, во время послекалибровочных проверок). Если приведенный в качестве примера микропроцессор 202, 302 определяет, что была обнаружена ошибка, управление переходит к этапу 514, на котором приведенный в качестве примера микропроцессор 202, 302 генерирует сообщение об ошибке, после чего приведенный в качестве примера способ по ФИГ. 5 заканчивается. Если приведенный в качестве примера микропроцессор 202, 302 определяет, что ошибки не обнаружены, управление переходит к этапу 512. На этапе 512 приведенный в качестве примера микропроцессор 202, 302 корректирует позиционер 200, 300 (например, на основании калиброванных значений, определенных на этапах 504 и 506), после чего приведенный в качестве примера способ по ФИГ. 5 заканчивается.
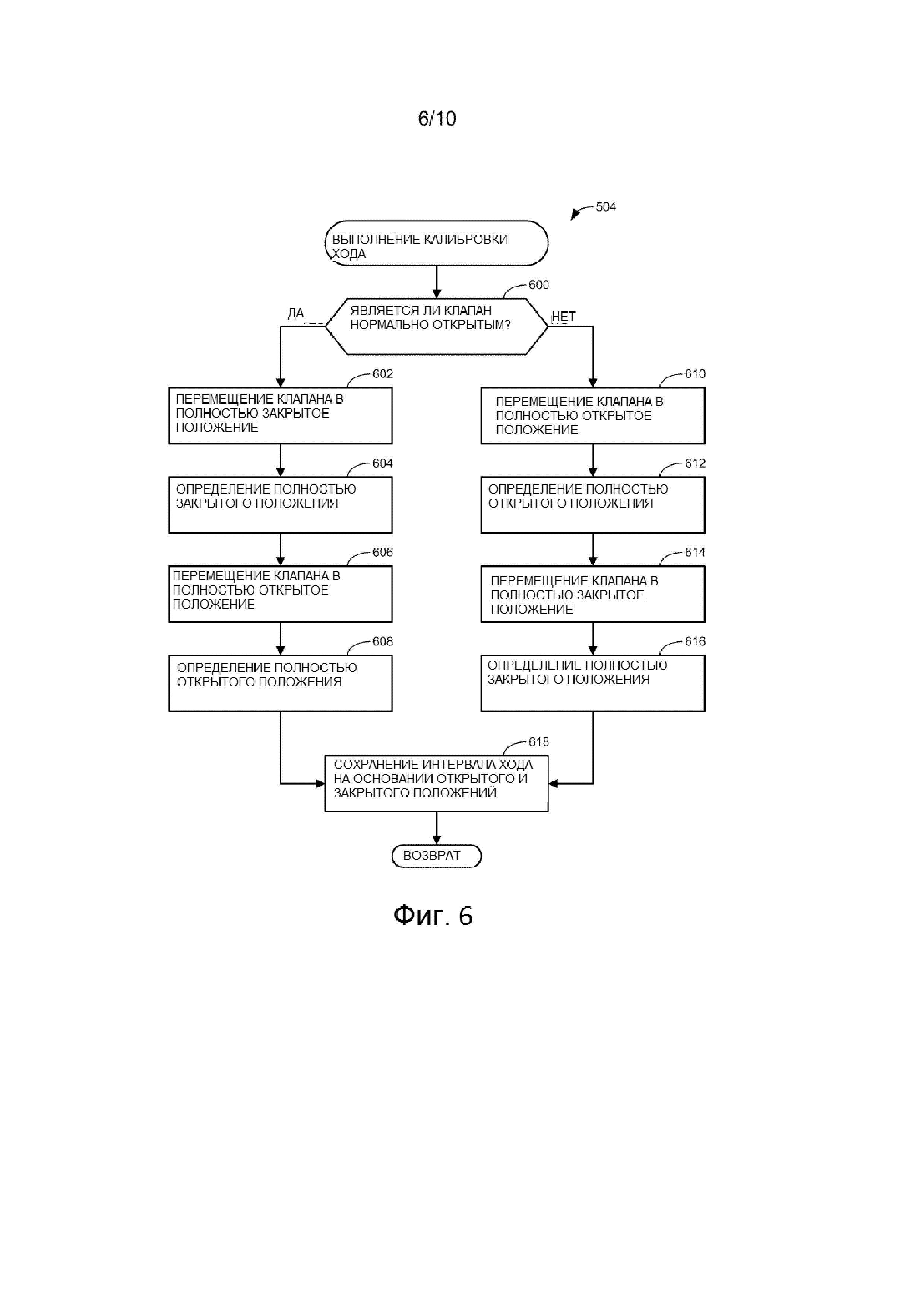
[0041] На ФИГ. 6 подробно изображен способ выполнения калибровки хода, входящий в этап 504 на ФИГ. 5. В частности, приведенный в качестве примера способ по ФИГ. 6 начинается на этапе 600, на котором приведенный в качестве примера микропроцессор 202, 302 определяет, является ли клапан 210 нормально открытым. Например, клапан 210 может представлять собой предохранительный отсекающий клапан, который, как правило, нормально открыт, за исключением случаев аварийного выключения. В некоторых примерах микропроцессор 202, 302 определяет нормальное положение клапана 210, чтобы определить порядок, в котором будет откалиброван каждый из концов хода клапана, поскольку этот порядок влияет на выполнение калибровки I/P-смещения, описанной ниже со ссылками на ФИГ. 7. В частности, как описано более подробно ниже, калибровку I/P-смещения выполняют на упоре (например, на одной из конечных точек интервала хода клапана). В некоторых примерах клапан 210 удерживают на упоре путем жесткой отсечки (например, при 0% давлении или 100% давлении). В других примерах позиционер 200, 300 удерживает клапан 210 путем регулирования давления до заданной величины за пределами калибровочного значения, но в пределах подводимого давления (например, выше 0% давления и ниже 100% давления). Такое регулирование на упоре на основании давления в данном документе упоминается как регулирование давления в конечной точке. При осуществлении регулирования давления в конечной точке интегральное насыщение в параметрах позиционера 200, 300 уменьшается и параметры сохраняются в нулевом состоянии или вблизи него таким образом, что позиционер 200, 300 может более быстро реагировать на сигнал управления, чтобы привести в движение клапан 210, чем при управлении из состояния отсечки. В некоторых примерах позиционер 200, 300 может переключаться между регулированием давления отсечки и регулированием давления в конечной точке. В некоторых примерах заданную величину для калибровки I/P-смещения реализуют с помощью регулирования давления в конечной точке. В таких примерах хотя калибровка I/P-смещения может быть выполнена в любом конце хода клапана, в некоторых примерах калибровку I/P-смещения выполняют, когда клапан находится на конце хода, соответствующем нормальным условиям эксплуатации, таким образом, чтобы заданная величина для калибровки I/P-смещения находилась на том же конце хода клапана, что и заданная величина для регулирования давления в конечной точке клапана в штатном режиме эксплуатации. Таким образом, если во время калибровки I/P-смещения нарушается связь или возникает какая-либо другая проблема, заданная величина для регулирования давления в конечной точке уже сконфигурирована должным образом для штатного режима эксплуатации, что позволяет снизить вероятность непреднамеренного управления клапаном 210 на неправильном конце хода при возобновлении регулирования давления в конечной точке. Кроме того, в некоторых примерах калибровку I/Р-смещения выполняют после калибровки хода клапана 210, при этом калибровку хода заканчивают, когда клапан 210 перемещается в конечную точку в штатном режиме эксплуатации. Таким образом, после завершения калибровки I/Р-смещения нет необходимости перемещать клапан обратно в требуемое нормальное положение, что может занимать значительное количество времени для больших клапанов (например, несколько минут).
[0042] Соответственно, если приведенный в качестве примера микропроцессор 202, 302 определяет, что клапан 210 нормально открыт (этап 600), управление переходит к этапу 602, на котором приведенный в качестве примера микропроцессор 202, 302 переводит клапан в полностью закрытое положение (например, в противоположный конец по отношению к нормальному положению). На этапе 604 приведенный в качестве примера микропроцессор 202, 302 определяет полностью закрытое положение (например, путем определения положения клапана 210, в котором он достигает упора, с помощью датчика 312 положения). На этапе 606 приведенный в качестве примера микропроцессор 202, 302 переводит клапан в полностью открытое положение (например, соответствующее нормальному положению). На этапе 608 приведенный в качестве примера микропроцессор 202, 302 определяет полностью открытое положение (например, путем определения положения клапана 210, в котором он достигает упора, с помощью датчика 312 положения) и затем управление переходит к этапу 618. На этапе 618 приведенный в качестве примера микропроцессор 202, 302 сохраняет интервал хода на основании определенных открытого и закрытого положений, после чего приведенный в качестве примера способ по ФИГ. 6 и управление возвращают к приведенному в качестве примера способу по ФИГ. 5 для выполнения калибровки I/P-смещения на этапе 506 (которая описана более подробно по ФИГ. 7).
[0043] Возвращаясь к этапу 600, если приведенный в качестве примера микропроцессор 202, 302 определяет, что клапан 210 не является нормально открытым (например, потому, что он нормально закрыт), управление переходит к этапу 610, на котором приведенный в качестве примера микропроцессор 202, 302 переводит клапан в полностью открытое положение (например, в противоположный конец по отношению к нормальному положению). На этапе 612 приведенный в качестве примера микропроцессор 202, 302 определяет полностью открытое положение. На этапе 614 приведенный в качестве примера микропроцессор 202, 302 переводит клапан в полностью закрытое положение (например, соответствующее нормальному положению). На этапе 616, приведенный в качестве примера микропроцессор 202, 302 определяет полностью закрытое положение и затем переходит к этапу 618, на котором приведенный в качестве примера микропроцессор 202, 302 сохраняет интервал хода на основании определенных открытого и закрытого положений. После этого выполнение приведенного в качестве примера способа по ФИГ. 6 заканчивают и управление возвращают к приведенному в качестве примера способу по ФИГ. 5 для выполнения калибровки I/P-смещения на этапе 506 (которая описана более подробно по ФИГ. 7). Как показано в приведенном примере, конечное положение клапана 210 на этапе 608 или на этапе 616 соответствует положению штатного режима эксплуатации клапана 210, который определен на этапе 600. Таким образом, клапан 210 уже находится в положении для выполнения способа калибровки I/P-смещения на упоре, соответствующем положению штатного режима эксплуатации клапана 210.
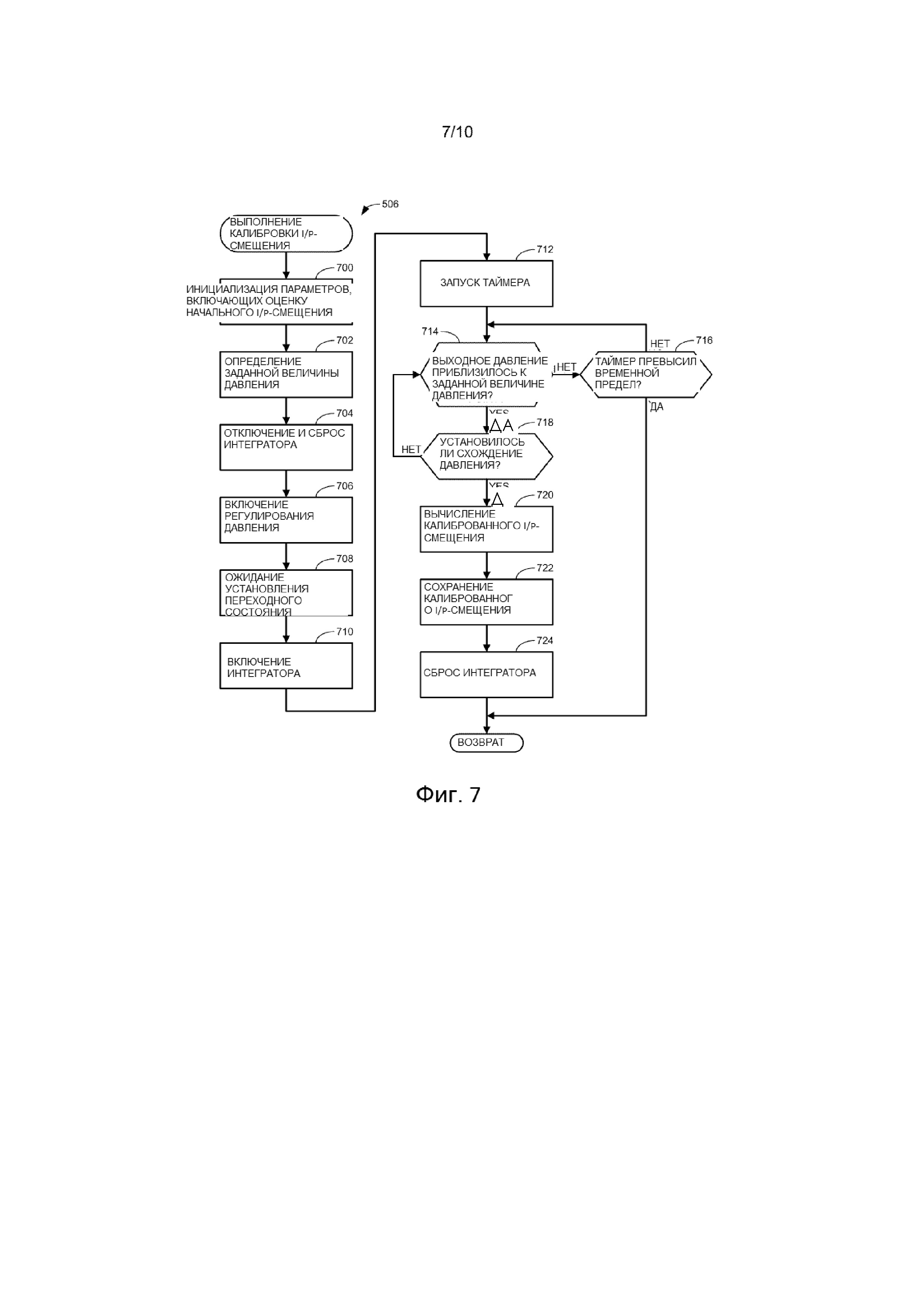
[0044] На ФИГ. 7 подробно изображен способ выполнения калибровки I/P-смещения, входящий в этап 506 на ФИГ. 5. В частности, приведенный в качестве примера способ по ФИГ. 7 начинается на этапе 700, на котором приведенный в качестве примера микропроцессор 202, 302 инициализирует параметры, которые включают начальную оценку I/P-смещения. В некоторых примерах начальная оценка I/P-смещения представляет собой начальную наиболее точную оценку I/P-смещения, необходимую для балансировки позиционера 200, 300 на основании технологических условий.
[0045] На этапе 702 приведенный в качестве примера микропроцессор 202, 302 определяет заданную величину 212 давления. В примерах, в которых применяют исполнительный механизм одностороннего действия, заданная величина 212 давления может представлять собой любое значение давления между атмосферным давлением и подводимым давлением. В примерах, в которых применяют исполнительный механизм двустороннего действия, заданная величина 212 давления может представлять собой любое значение давления между отрицательным подводимым давлением и подводимым давлением. В некоторых примерах заданная величина 212 давления соответствует положению клапана между конечными точками интервала хода. В некоторых примерах определяют заданную величину 212 давления для удержания исполнительного механизма 208 на упоре для обеспечения фиксированного объема в исполнительном механизме 208 на всем протяжении калибровочного испытания. Как было описано выше, в некоторых примерах упора достигают путем перемещения клапана 210 к концу его интервала хода (например, когда он полностью открыт или полностью закрыт). В некоторых примерах, определяют, в частности, что упор соответствует концу хода клапана, который соответствует положению штатного режима эксплуатации клапана 210. В показанном примере клапан 210 уже находится в своем нормальном положении, определенном при выполнении калибровочного испытания (этап 504 на ФИГ. 5), как описано выше со ссылкой на ФИГ. 6. В некоторых таких примерах давление, связанное с положением клапана 210 на упоре, определяют в качестве начальных условий для калибровки I/P-смещения, а заданную величину 212 давления определяют (этап 702) как давление, не соответствующее давлению начальных условий. Другими словами, если положение штатного режима эксплуатации соответствует клапану 210, когда давление находится на верхнем уровне калибровочного значения (например, высокое калибровочное давление), приведенный в качестве примера микропроцессор 202, 302 определяет заданную величину 212 давления выше значения давления, применяемого для приведения клапана 210 в нормальное положение. Если положение штатного режима эксплуатации соответствует клапану 210, когда давление находится на нижнем уровне калибровочного значения (например, низкое калибровочное давление), приведенный в качестве примера микропроцессор 202, 302 определяет заданную величину 212 давления ниже значения давления, применяемого для приведения клапана 210 в нормальное положение. Применение такой заданной величины 212 давления гарантирует, что исполнительный механизм будет зафиксирован на соответствующем упоре. Таким образом, в клапане 210 отсутствует движение, а проблемы скачкообразного перемещения, потери хода и т. д. клапанов с высоким коэффициентом трения исключаются из способа управления, что дает возможность определять I/P-смещение более точно и/или корректно. В качестве конкретного примера, если сторона высокого давления соответствует нормальному положению клапана 210 и соответствует давлению 45 фунт/кв. дюйм, приведенный в качестве примера микропроцессор 202, 302 определяет заданную величину 212 давления как давление между 45 фунт/кв. дюйм и верхним пределом, определяемым подводимым давлением. Аналогичным образом, если сторона высокого давления соответствует нормальному положению клапана 210 и соответствует давлению 25 фунт/кв. дюйм, приведенный в качестве примера микропроцессор 202, 302 определяет заданную величину 212 давления как давление между 25 фунт/кв. дюйм и нижним пределом, определяемым атмосферным давлением. В некоторых примерах приведенный в качестве примера микропроцессор 202, 302 устанавливает заданную величину 212 давления в значение, относительно близкое (например, в пределах 4 фунт/кв. дюйм) к начальным условиям (например, давление, связанное с соответствующим упором), для обеспечения возможности более быстрого приближения, осуществляемого контроллером 215 с меньшим ненужным интегральным насыщением, которое имело бы место в случае большего шага в заданной величине 212 давления.
[0046] На этапе 704 приведенный в качестве примера микропроцессор 202, 302 отключает и сбрасывает (например, обнуляет аккумулятор) интегратор 218. На этапе 706 приведенный в качестве примера микропроцессор 202, 302 осуществляет регулирование давления (например, начинает управлять клапаном на основании обратной связи 214 выходного давления по отношению к определенной заданной величине 212 давления). На этапе 708 приведенный в качестве примера микропроцессор 202, 302 ожидает, пока установится переходное состояние. На этапе 710 приведенный в качестве примера микропроцессор 202, 302 включает интегратор 218. В некоторых примерах способ, входящий в этапы 704-610 показанного примера, также уменьшает влияние интегрального насыщения в интеграторе 218. Как описано выше, при определении заданной величины 212 давления эта заданная величина несколько отличается (например, на 4 фунт/кв. дюйм) от текущих (стартовых) условий давления в положении штатного режима эксплуатации клапана 210. В таких условиях из-за ошибки в аккумуляторе, связанной с интегральным насыщением интегратора 218, требуется время на возврат в исходное состояние до того, как система осуществит приближение. Соответственно, в некоторых примерах интегратор 218 отключают (этап 704) до начала процедуры регулирования давления (этап 706). В некоторых примерах по прошествии определенного периода времени (например, 9 секунд), в течение которого сглаживают ступенчатый входной сигнал (этап 708), интегратор 218 включают (этап 710).
[0047] На этапе 712 приведенный в качестве примера микропроцессор 202, 302 начинает отсчет времени. На этапе 714 приведенный в качестве примера микропроцессор 202, 302 определяет, приблизилось ли выходное давление (например, указываемое сигналом обратной связи 214 выходного давления) к заданной величине 212 давления. В некоторых примерах это схождение соответствует абсолютной величине разности между сигналом обратной связи 214 выходного давления и заданной величиной 212 давления, которая меньше, чем порог (например, менее чем 0,5 фунт/кв. дюйм). Если приведенный в качестве примера микропроцессор 202, 302 определяет, что выходное давление не приблизилось к заданной величине давления, управление переходит к этапу 716, на котором приведенный в качестве примера микропроцессор 202, 302 определяет, превышен ли таймером временной предел. В некоторых примерах временной предел определяет предельную продолжительность, после которой калибровочное испытание прерывается из-за слишком долгого схождения. Временной предел может представлять собой любую применимую продолжительность (например, 6 минут, 10 минут и т. д.). Если приведенный в качестве примера микропроцессор 202, 302 определяет, что таймер превысил временной предел (этап 716), приведенный в качестве примера способ, приведенный на ФИГ. 7, заканчивается и возвращается к приведенному в качестве примера способу по ФИГ. 5. Если приведенный в качестве примера микропроцессор 202, 302 определяет, что таймер не превысил временной предел (этап 716), управление возвращают на этап 714 для продолжения регулирования выходного давления для его приближения к заданной величине 212 давления.
[0048] На этапе 714, если приведенный в качестве примера микропроцессор 202, 302 определяет, что выходное давление приблизилось к заданной величине давления, управление переходит к этапу 718, на котором приведенный в качестве примера микропроцессор 202, 302 определяет, установилось ли схождение давления. В некоторых примерах разность между сигналом обратной связи 214 выходного давления и заданной величиной 212 давления может находиться в пределах порога схождения, но фактически не сходиться из-за того, что выходное давление колеблется около заданной величины давления. Соответственно, на этапе 718 приведенный в качестве примера микропроцессор 202, 302 инициирует проверку того, установилось ли выходное давление в заданной величине. В некоторых примерах установление схождения определяют на основании того, что выходное давление остается в пределах порога схождения (например, +/- 0,5 фунт/кв. дюйм) заданной величины в течение временного периода для порога схождения. Временной период схождения может представлять собой любую применимую продолжительность (например, 30 секунд, 55 секунд, 1 минута и т. д.). Если приведенный в качестве примера микропроцессор 202, 302 определяет, что схождение давления не установилось, управление возвращают на этап 714 для продолжения регулирования выходного давления для его приближения к заданной величине 212 давления. Если приведенный в качестве примера микропроцессор 202, 302 определяет, что схождение давления установилось, управление переходит к этапу 720.
[0049] На этапе 720 приведенный в качестве примера микропроцессор 202, 302 вычисляет конечное или калиброванное I/P-смещение. В некоторых примерах калиброванное значение I/Р-смещения равно начальной оценке I/P-смещения (определенной на этапе 700) плюс значение в аккумуляторе интегратора 218. В некоторых примерах калиброванное I/P-смещение равно текущему I/P-смещению, которое обновляется непосредственно на выходе интегратора, когда выходное давление регулируют в сторону заданной величины давления. Другими словами, текущее I/P-смещение представляет собой изначально присваиваемое значение начальной оценки I/P-смещения, в то время как значение интегратора определяют в каждом интервале измерения, причем это значение добавляют к текущему I/P-смещению для создания нового значения текущего I/P-смещения. Текущее I/P-смещение обновляется на значение интегратора в каждом интервале измерения до тех пор, пока выходное давление не приблизится к заданной величине давления. Конечное значение текущего I/P-смещения соответствует калиброванному I/P-смещению. На этапе 722 приведенный в качестве примера микропроцессор 202, 302 сохраняет калиброванное значение I/P-смещения. На этапе 724 приведенный в качестве примера микропроцессор 202, 302 сбрасывает интегратор 218 (например, устанавливает значение аккумулятора обратно в ноль), при этом выполнение приведенного в качестве примера способа, представленного на ФИГ. 7, заканчивают и управление возвращается к приведенному в качестве примера способу по ФИГ. 5, как описано выше.
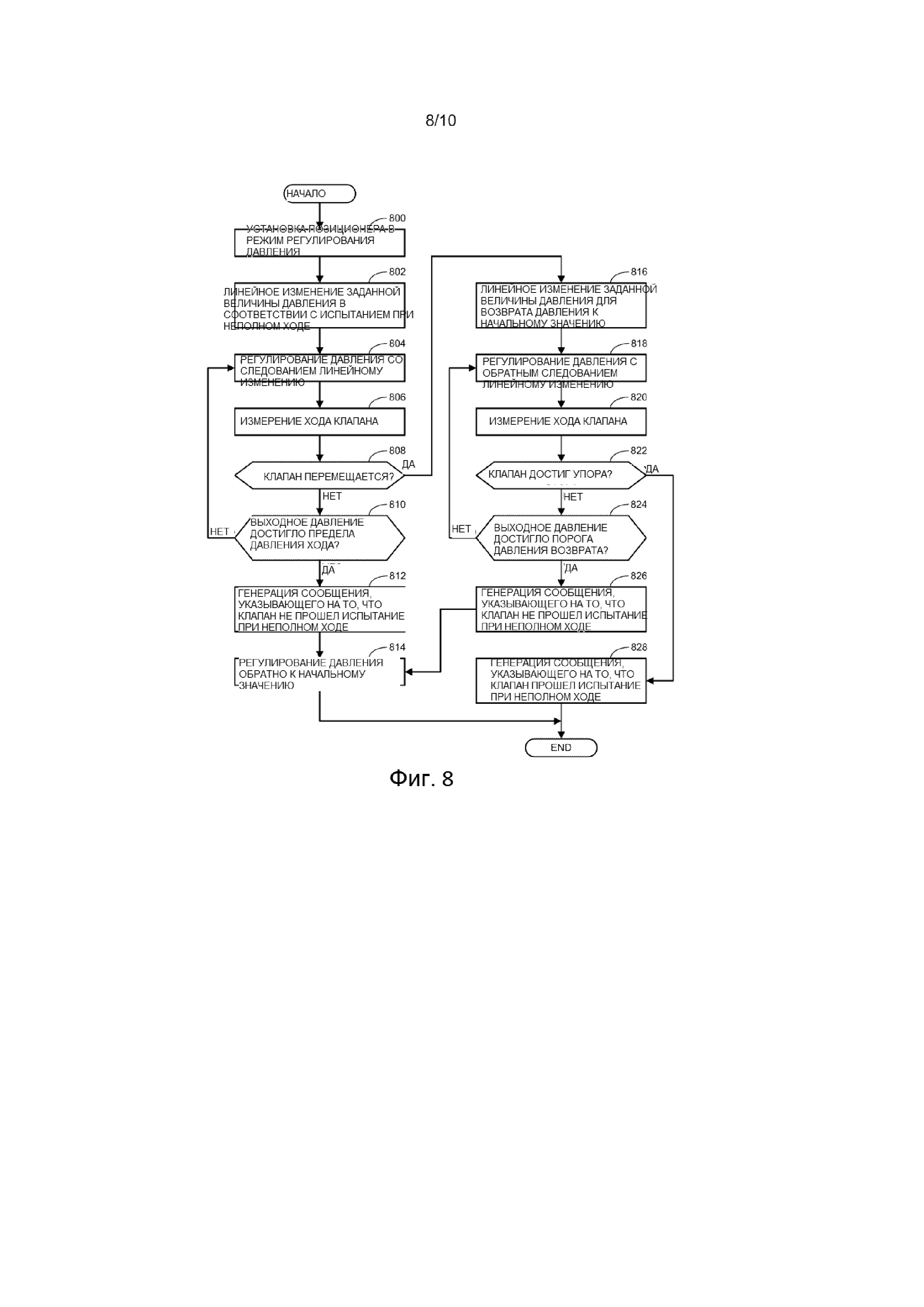
[0050] На ФИГ. 8 показана блок-схема, представляющая приведенный в качестве примера способ, позволяющий с помощью приведенных в качестве примера позиционеров 200, 300 по ФИГ. 2 и/или 3 осуществлять испытание при неполном ходе на клапане. В этом примере способ может быть реализован с применением машиночитаемых команд, которые содержат программу для выполнения процессором, например, процессором 1012, показанным в приведенной в качестве примера процессорной платформе 1000, обсуждаемой ниже в отношении ФИГ. 10. Эта программа может быть реализована в программном обеспечении, хранимом на материальном машиночитаемом носителе данных, таком как CD-ROM, гибкий диск, жесткий диск, цифровой универсальный диск (DVD), диск Blu-ray или запоминающее устройство, связанном с процессором 1012, но всю программу и/или ее часть альтернативно может выполнять устройство, отличное от процессора 1012, и/или она может быть воплощена во встраиваемом программном обеспечении или специализированном аппаратном обеспечении. Кроме того, хотя приведенная в качестве примера программа описана со ссылкой на блок-схему, показанную на ФИГ. 8, альтернативно могут быть применены многие другие способы реализации приведенных в качестве примера позиционеров 200, 300. Например, может быть изменен порядок выполнения блоков и/или некоторые из описанных блоков могут быть изменены, исключены или объединены.
[0051] Согласно ФИГ. 8, приведенный в качестве примера способ начинается этапом 800, на котором приведенный в качестве примера микропроцессор 202, 302 устанавливает приведенный в качестве примера позиционер 200, 200 в режим регулирования давления. На этапе 802 приведенный в качестве примера микропроцессор 202, 302 линейно изменяет заданную величину 212 давления согласно испытанию при неполном ходе. В некоторых примерах линейное изменение, определяемое испытанием при неполном ходе, предполагает определенную скорость изменения заданной величины давления (например, -1 фунт/кв. дюйм/с) и определенный порог давления хода, после которого выходное давление не изменяют. На этапе 804 приведенный в качестве примера микропроцессор 202, 302 регулирует давление (например, на основании обратной связи 214 выходного давления), следуя линейному изменению. Во время испытания при неполном ходе клапаном 210 управляют таким образом, чтобы перемещать его от начального (например, нормального) положения, а затем возвращать в начальное положение. Для целей данного патента, термин «направление хода», как явным образом определено в настоящем документе, означает направление перемещения элемента регулирования расхода клапана 210 при удалении от начального положения клапана 210 во время испытания при неполном ходе. Кроме того, термин «обратное направление», как явным образом определено в настоящем документе, означает направление перемещения элемента регулирования расхода клапана 210 при перемещении в направлении начального положения клапана 210 во время испытания при неполном ходе (например, после того, как клапан частично переместили в направлении хода). Таким образом, в примере, показанном на ФИГ. 8, давление, регулируемое (на этапе 804) на основании заданной величины 212 давления (определенной на этапе 802), служит для приведения в движение клапана 210 в направлении хода. На этапе 806 приведенный в качестве примера микропроцессор 202, 302 измеряет ход клапана (например, с помощью датчика 312 положения). На этапе 808 приведенный в качестве примера микропроцессор 202, 302 определяет, переместился ли клапан 210. В некоторых примерах может произойти значительная потеря хода между исполнительным механизмом 208 и штоком или стержнем клапана 210 и между штоком или стержнем и элементом регулирования расхода (например, тарелкой, пробкой и т. д.). Соответственно, в некоторых примерах приведенный в качестве примера микропроцессор 202, 302 определяет, что клапан 210 переместился, после того, как ход клапана превысит значение минимального порогового перемещения (например, 5% от интервала хода). В некоторых примерах микропроцессор 202, 302 определяет, что клапан 210 переместился, когда ход клапана достигает заданного целевого положения хода (например, 25% от начального положения клапана 210).
[0052] Если приведенный в качестве примера микропроцессор 202, 302 определяет, что клапан 210 не перемещается (например, положение клапана 210 находится в пределах минимального порогового перемещения), управление переходит к этапу 810, на котором приведенный в качестве примера микропроцессор 202, 302 определяет, достигло ли выходное давление порога давления хода, установленного для линейного изменения. Если приведенный в качестве примера микропроцессор 202, 302 определяет, что выходное давление не достигло значения порога давления хода, управление возвращают на этап 804, чтобы продолжить следование линейному изменению. Если приведенный в качестве примера микропроцессор 202, 302 определяет, что выходное давление достигло значения порога давления хода, управление переходит к этапу 812, на котором приведенный в качестве примера микропроцессор 202, 302 генерирует сообщение (например, сигнал тревоги), указывающее на то, что клапан 210 не прошел испытание при неполном ходе. На этапе 814 приведенный в качестве примера микропроцессор 202, 302 (например, с помощью контроллера 215 давления) регулирует давление обратно к начальному состоянию (которое, например, имело место перед началом испытания при неполном ходе), при этом выполнение приведенного в качестве примера способа, представленного на ФИГ. 8, заканчивают.
[0053] Возвращаясь к этапу 808, если приведенный в качестве примера микропроцессор 202, 302 определяет, что клапан 210 переместился (например, перемещение превышает значение минимального порогового перемещения на 5% интервала хода), управление переходит к этапу 816. Этапы 816-826, как правило, аналогичны соответствующим этапам 802-712, описанным выше, за исключением того, что в данном случае клапан 210 находится на обратном пути (например, перемещаясь в обратном направлении) к начальному положению после перемещения в соответствии с линейно изменяющейся заданной величиной давления. Таким образом, испытание при неполном ходе позволяет убедиться не только в том, что клапан 210 может перемещаться в направлении хода, но и в том, что клапан не заклинен при перемещении назад в обратном направлении в свое начальное положение (например, положение штатного режима эксплуатации).
[0054] В частности, на этапе 816 приведенный в качестве примера микропроцессор 202, 302 линейно изменяет заданную величину 212 давления, чтобы вернуть давление к его начальному значению. В некоторых примерах линейное изменение соответствует линейному изменению с противоположным направлением, определяемому на этапе 802 с соответствующей скоростью изменения заданной величины давления (например, +1 фунт/кв. дюйм/с) и определенным порогом давления (например, на 5 фунт/кв. дюйм выше давления, которое находится на верхнем уровне калибровочного значения), после которого выходное давление не изменяют, не возвращая клапан в его начальное положение. На этапе 818 приведенный в качестве примера микропроцессор 202, 302 регулирует давление (например, на основании обратной связи 214 выходного давления), следуя обратному линейному изменению. На этапе 820 приведенный в качестве примера микропроцессор 202, 302 измеряет ход клапана (например, с помощью датчика 312 положения). На этапе 822 приведенный в качестве примера микропроцессор 202, 302 определяет, достиг ли клапан 210 упора. В некоторых примерах может произойти значительная потеря хода между исполнительным механизмом 208 и штоком или стержнем клапана 210 и между штоком или стержнем и элементом регулирования расхода (например, тарелкой, пробкой и т. д.). Соответственно, в некоторых примерах приведенный в качестве примера микропроцессор 202, 302 определяет, что клапан 210 достиг упора, когда положение хода клапана 210 будет находиться в пределах минимального порогового перемещения от калиброванного положения упора клапана (например, 5% от интервала хода).
[0055] Если приведенный в качестве примера микропроцессор 202, 302 определяет, что клапан 210 не достиг упора, управление переходит к этапу 824, на котором приведенный в качестве примера микропроцессор 202, 302 определяет, достигло ли выходное давление порога возвратного давления. Если приведенный в качестве примера микропроцессор 202, 302 определяет, что выходное давление не достигло значения порога возвратного давления, управление возвращают на этап 818, чтобы продолжить следование обратному линейному изменению. Если приведенный в качестве примера микропроцессор 202, 302 определяет, что выходное давление достигло значения порога возвратного давления, управление переходит к этапу 826. На этапе 826 приведенный в качестве примера микропроцессор 202, 302 генерирует сообщение (например, сигнал тревоги), указывающее на то, что клапан 210 не прошел испытание при неполном ходе, при этом управление возвращают на этап 814, на котором приведенный в качестве примера микропроцессор 202, 302 (например, с помощью контроллера 215 давления) регулирует давление обратно к начальному состоянию. Возвращаясь к этапу 822, если приведенный в качестве примера микропроцессор 302 определяет, что клапан 210 достиг упора, управление переходит к этапу 828. На этапе 828 приведенный в качестве примера микропроцессор 302 генерирует сообщение, указывающее на то, что клапан 210 прошел испытание при неполном ходе, при этом выполнение приведенного в качестве примера способа по ФИГ. 8 заканчивают.
[0056] На ФИГ. 9 показана блок-схема, представляющая приведенный в качестве примера способ, позволяющий с помощью приведенного в качестве примера позиционера 300 по ФИГ. 3 осуществлять испытание при неполном ходе на клапане. В этом примере способ может быть реализован с применением машиночитаемых команд, которые содержат программу для выполнения процессором, например, процессором 1012, показанным в приведенной в качестве примера процессорной платформе 1000, обсуждаемой ниже в отношении ФИГ. 10. Эта программа может быть реализована в программном обеспечении, хранимом на материальном машиночитаемом носителе данных, таком как CD-ROM, гибкий диск, жесткий диск, цифровой универсальный диск (DVD), диск Blu-ray или запоминающее устройство, связанном с процессором 1012, но всю программу и/или ее часть альтернативно может выполнять устройство, отличное от процессора 1012, и/или она может быть воплощена во встраиваемом программном обеспечении или специализированном аппаратном обеспечении. Кроме того, хотя приведенная в качестве примера программа описана со ссылкой на блок-схему, показанную на ФИГ. 9, альтернативно могут быть применены многие другие способы реализации приведенного в качестве примера позиционера 300. Например, может быть изменен порядок выполнения блоков и/или некоторые из описанных блоков могут быть изменены, исключены или объединены.
[0057] Согласно ФИГ. 9, приведенный в качестве примера способ начинается этапом 900, на котором приведенный в качестве примера микропроцессор 302 (например, с помощью контроллера 304 хода) определяет целевое положение хода. В некоторых примерах целевое положение хода соответствует положению на части пути интервала хода, удаленному от начального положения клапана 210 (например, 90% хода, если нормальное положение клапана 210 расположено в точке 100% хода). В некоторых примерах целевое положение хода соответствует конечной точке интервала хода, противоположной конечной точке, в которой находится нормальное положение клапана 210. Таким образом, в некоторых примерах вместо испытания при неполном ходе, приведенный в качестве примера позиционер 300 осуществляет испытание при полном ходе клапана 210. На этапе 902 приведенный в качестве примера микропроцессор 302 (например, с помощью ограничителя 306) устанавливает верхний и нижний пороги давления. В некоторых примерах один или оба из верхнего и нижнего порогов давления служат в качестве предела для диапазона или величины выходного давления. В некоторых примерах один или оба из верхнего и нижнего порогов давления связывают с выдачей сигнала тревоги или предупреждения, но при этом они никак иначе не ограничивают регулирование выходного давления. На этапе 904 приведенный в качестве примера микропроцессор 302 (например, с помощью ограничителя 306) определяет скорость линейного изменения для заданной величины 212 давления на основании целевого положения хода. На этапе 906 приведенный в качестве примера микропроцессор 302 регулирует давление (например, на основании обратной связи 214 выходного давления) для перемещения клапана 210 в направлении хода в соответствии с линейно изменяющейся заданной величиной 212 давления. На этапе 908 приведенный в качестве примера микропроцессор 302 измеряет ход клапана (например, с помощью датчика 312 положения). На этапе 910 приведенный в качестве примера микропроцессор 302 определяет, достиг ли клапан 210 целевого положения хода.
[0058] Если приведенный в качестве примера микропроцессор 302 определяет, что клапан 210 не достиг целевого положения хода, управление переходит к этапу 912, на котором приведенный в качестве примера микропроцессор 302 определяет, достигло ли давление целевого порога давления. Целевой порог давления зависит от начального состояния системы перед испытанием при неполном ходе. Например, если клапан 210 начинает с конца хода, соответствующего верхнему уровню калибровочного значения (например, с высоким давлением), испытание при неполном ходе включает сброс давления в исполнительном механизме 208 для снижения давления. Таким образом, целевой порог давления в этом примере представляет собой нижний порог давления. В некоторых таких примерах нижний порог давления представляет собой предел, который обеспечивает недопущение слишком сильного снижения давления. Например, если клапан 210 начинает с конца хода, соответствующего нижнему уровню калибровочного значения (например, с низким давлением), испытание при неполном ходе включает наполнение исполнительного механизма 208 для поднятия давления, а целевой порог давления становится верхним порогом давления. Таким образом, если приведенный в качестве примера микропроцессор 302 определяет, что давление не достигло целевого порога давления (этап 912), управление возвращают на этап 906, чтобы продолжить регулирование давления в соответствии с линейно изменяющейся заданной величиной 212 давления. Если приведенный в качестве примера микропроцессор 302 определяет, что давление достигло целевого порога давления (этап 912), управление переходит к этапу 914, на котором приведенный в качестве примера микропроцессор 302 генерирует сообщение (например, сигнал тревоги), указывающее на то, что клапан 210 не прошел испытание при неполном ходе. Затем управление переходит к этапу 916, на котором приведенный в качестве примера микропроцессор 302 (например, с помощью контроллера 215 давления) регулирует давление обратно к начальному состоянию (которое, например, имело место перед началом испытания при неполном ходе), при этом выполнение приведенного в качестве примера способа по ФИГ. 8 заканчивают.
[0059] Возвращаясь к этапу 910, если приведенный в качестве примера микропроцессор 302 определяет, что клапан 210 достиг целевого положения хода, управление переходит к этапу 918. Этапы 918-830, как правило, аналогичны соответствующим этапам 904-814, описанным выше, за исключением того, что в данном случае клапан 210 находится на обратном пути к начальному положению после успешного перемещения к целевому положению хода. Таким образом, испытание при неполном ходе позволяет убедиться не только в том, что клапан 210 может перемещаться, но и в том, что он не заклинен при перемещении назад в свое начальное положение.
[0060] В частности, на этапе 918 приведенный в качестве примера микропроцессор 302 (например, с помощью ограничителя 306) определяет скорость линейного изменения для заданной величины 212 давления, чтобы вернуть давление к его начальному значению. На этапе 920 приведенный в качестве примера микропроцессор 302 регулирует давление (например, на основании обратной связи 214 выходного давления) для перемещения клапана 210 в обратном направлении в соответствии с новой линейно изменяющейся заданной величиной 212 давления. На этапе 922 приведенный в качестве примера микропроцессор 302 измеряет ход клапана (например, с помощью датчика 312 положения). На этапе 924 приведенный в качестве примера микропроцессор 302 определяет, достиг ли клапан 210 начального положения. Если приведенный в качестве примера микропроцессор 302 определяет, что клапан 210 не достиг начального положения (например, в пределах минимального порогового перемещения), управление переходит к этапу 926, на котором приведенный в качестве примера микропроцессор 302 определяет, достигло ли давление целевого порога давления. В данном случае целевой порог давления представляет собой порог давления, который противоположен целевому порогу давления, применяемому на этапе 912. Другими словами, если нижний порог давления является целевым на этапе 912, верхний порог давления является целевым на этапе 926. Аналогичным образом, если верхний порог давления является целевым на этапе 912, нижний порог давления является целевым на этапе 926. В некоторых примерах целевой порог давления, определяемый на этапе 926, связывают с выдачей сигнала тревоги, но при этом он никак иначе не ограничивает регулирование выходного давления. Если приведенный в качестве примера микропроцессор 302 определяет, что давление не достигло целевого порога давления (этап 926), управление возвращают на этап 920, чтобы продолжить регулирование давления в соответствии с новой линейно изменяющейся заданной величиной 212 давления. Если приведенный в качестве примера микропроцессор 302 определяет, что выходное давление достигло целевого порога давления (этап 926), управление переходит к этапу 928. На этапе 928 приведенный в качестве примера микропроцессор 302 генерирует сообщение (например, сигнал тревоги), указывающее на то, что клапан 210 не прошел испытание при неполном ходе, при этом управление возвращают на этап 916, на котором приведенный в качестве примера микропроцессор 302 (например, с помощью контроллера 215 давления) продолжает регулировать давление обратно к начальному значению. Возвращаясь к этапу 924, если приведенный в качестве примера микропроцессор 302 определяет, что клапан 210 достиг начального положения, управление переходит к этапу 930. На этапе 930 приведенный в качестве примера микропроцессор 302 генерирует сообщение, указывающее на то, что клапан 210 прошел испытание при неполном ходе, при этом выполнение приведенного в качестве примера способа по ФИГ. 9 заканчивают.
[0061] Как уже было упомянуто выше, приведенные в качестве примера способы по ФИГ. 5-9 могут быть реализованы с применением кодированных команд (например, машинных и/или машиночитаемых команд), хранимых на материальном машиночитаемом носителе данных, таком как накопитель на жестком диске, энергонезависимое запоминающее устройство на базе флэш-технологии, постоянное запоминающее устройство (ROM), компакт-диск (CD), цифровой универсальный диск (DVD), кэш, запоминающее устройство с произвольным порядком выборки (ОЗУ) и/или любое другое устройство хранения данных или дисковое устройство хранения данных, в котором информация хранится в течение любого периода времени (например, в течение длительных периодов времени, постоянно, в отдельных случаях в течение короткого времени, для временной буферизации и/или для кэширования информации). В контексте настоящего документа термин материальный машиночитаемый носитель данных, в явной форме определен, как включающий машиночитаемое устройство хранения данных и/или дисковое устройство хранения данных любого типа и как исключающий передачу сигналов и исключающий среду передачи данных. В контексте настоящего документа выражения «материальный компьютерочитаемый носитель данных» и «материальный машиночитаемый носитель данных» взаимозаменяемы. Дополнительно или альтернативно, приведенные в качестве примера способы по ФИГ. 5-9 могут быть реализованы с применением кодированных команд (например, машинных и/или машиночитаемых команд), хранимых на энергонезависимом носителе данных, пригодном для ввода в вычислительную машину, и/или машиночитаемом носит еле данных, таком как накопитель на жестком диске, энергонезависимое запоминающее устройство на базе флэш-технологии, постоянное запоминающее устройство, компакт-диск, цифровой универсальный диск, кэш, запоминающее устройство с произвольным порядком выборки и/или любое другое устройство хранения данных или дисковое устройство хранения данных, в котором информация хранится в течение любого периода времени (например, в течение длительных периодов времени, постоянно, в отдельных случаях в течение короткого времени, для временной буферизации и/или для кэширования информации). В контексте настоящего документа термин энергонезависимый машиночитаемый носитель данных, в явной форме определен, как включающий машиночитаемое устройство хранения данных и/или дисковое устройство хранения данных любого типа и как исключающий передачу сигналов и исключающий среду передачи данных. В контексте настоящего документа, если фразу «по меньшей мере» применяют в качестве переходного термина в ограничительной части формулы изобретения, она является неограничивающей, также неограничивающим является и термин «содержащий».
[0062] На ФИГ. 10 представлена функциональная блок-схема приведенной в качестве примера процессорной платформы 1000, способной выполнять команды для реализации способов по ФИГ. 5-9, и, в более общем плане, позиционеров 200, 300 по ФИГ. 2 и/или 3. Процессорная платформа 1000 может представлять собой, например, сервер, персональную вычислительную машину, мобильное устройство (например, сотовый телефон, смартфон, планшет, такой как iPadTM), персональный цифровой помощник (PDA), устройство для доступа в Интернет, DVD-плеер, CD-плеер, устройство для записи цифрового видео, Blu-Ray-плеер, игровую приставку, персональное устройство для записи на видеодиск, телевизионную приставку или вычислительное устройство любого другого типа.
[0063] Процессорная платформа 1000 по представленному примеру содержит процессор 1012. Процессор 1012 по представленному примеру представляет собой часть аппаратного обеспечения. Например, процессор 1012 может быть реализован с помощью одной или большего количества интегральных схем, логических схем, микропроцессоров и контроллеров из любой требуемой линейки или произведенных любым изготовителем.
[0064] Процессор 1012 по представленному примеру содержит локальное запоминающее устройство 1013 (например, кэш). Процессор 1012 по представленному примеру способен осуществлять связь с основным запоминающим устройством, включающим энергозависимое запоминающее устройство 1014 и энергонезависимое запоминающее устройство 1016, посредством шины 1018. Энергозависимое запоминающее устройство 1014 может быть реализовано с применением синхронного динамического запоминающего устройства с произвольной выборкой (SDRAM), динамического запоминающего устройства с произвольной выборкой (DRAM), динамического запоминающего устройства с произвольной выборкой RAMBUS (RDRAM) и/или запоминающего устройства с произвольным доступом любого другого типа. Энергонезависимое запоминающее устройство 1016 может быть реализовано с применением запоминающего устройства на базе флэш-технологии и/или запоминающего устройства любого другого требуемого типа. Доступом к основному запоминающему устройству 1014, 1016 управляет контроллер запоминающего устройства.
[0065] Процессорная платформа 1000 по представленному примеру также содержит схему 1020 интерфейса. Схема 1020 интерфейса может быть реализована с применением стандарта интерфейса любого типа, например, интерфейса Ethernet, универсальной последовательной шины (USB) и/или интерфейса PCI Еxpress.
[0066] В представленном примере к схеме 1020 интерфейса подключают одно или большее количество устройств 1022 ввода. Устройство (-а) 1022 ввода позволяет (-ют) пользователю вводить данные и команды в процессор 1012. Устройство (-а) ввода может быть реализовано с применением, например, аудиосенсора, микрофона, фото- или видеокамеры, клавиатуры, кнопки, мыши, сенсорного экрана, трек-панели, трекбола, устройства isopoint и/или системы распознавания голоса.
[0067] Кроме того, к схеме 1020 интерфейса по представленному примеру подключают одно или большее количество устройств 1024 вывода. Устройства 1024 вывода могут быть реализованы, например, с применением устройств отображения (например, светоизлучающего диода (LED), органического светоизлучающего диода (OLED), жидкокристаллического дисплея, дисплея с электронно-лучевой трубкой (ЭЛТ), сенсорного экрана, тактильного устройства вывода, светоизлучающего диода (LED), принтера и/или громкоговорителя). Схема 1020 интерфейса по представленному примеру, таким образом, как правило, включает драйвер графических устройств, чип графического драйвера или процессор графического драйвера.
[0068] Схема 1020 интерфейса по представленному примеру также включает устройство связи, например, передатчик, приемник, приемопередатчик, модем и/или плату сетевого интерфейса, позволяющее осуществлять обмен данными с внешними машинами (например, вычислительными устройствами любого типа) посредством сети 1026 (например, Ethernet-соединения, цифровой абонентской линии (DSL), телефонной линии, коаксиального кабеля, сотовой телефонной системы и т. д.).
[0069] Процессорная платформа 1000 по представленному примеру также содержит одно или большее количество запоминающих устройств 1028 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 1028 большой емкости включают накопитель на гибких магнитных дисках, накопитель на жестких магнитных дисках, дисковод для компакт-дисков, дисковод для Blu-ray-дисков, RAID-системы и дисковод для универсальных цифровых дисков (DVD).
[0070] Кодированные команды 1032 для реализации способов по ФИГ. 5-8 могут хранить на запоминающем устройстве 1028 большой емкости, на энергозависимом запоминающем устройстве 1014, на энергонезависимом запоминающем устройстве 1016 и/или на переносном материальном машиночитаемом носителе данных, таком как CD-диск или DVD-диск.
[0071] Хотя в настоящем документе раскрыты приведенные в качестве конкретных примеров способы, устройства и изделия промышленного производства, объем защиты данного патента не ограничивается ними. Напротив, этот патент охватывает все способы, устройства и изделия промышленного производства, которые в явном виде входят в объем формулы изобретения настоящего патента.
Реферат
Раскрыты способы и устройства для испытания клапанов при неполном ходе с применением управления давлением. Один из приведенных в качестве примера способов включает генерацию первой заданной величины давления для позиционера клапана, соединенного с исполнительным механизмом для приведения в движение клапана. Первая заданная величина давления связана с испытанием при неполном ходе клапана. Приведенный в качестве примера способ также включает регулирование выходного давления позиционера для достижения первой заданной величины давления для приведения в движение клапана в направлении хода. Приведенный в качестве примера способ также включает определение того, не заклинен ли клапан, на основании выходного давления. 6 н. и 27 з.п. ф-лы, 10 ил.
Комментарии