Способ установления плановой траектории полета транспортного средства возле цели (варианты), вычислительное устройство (варианты) - RU2687008C2
Код документа: RU2687008C2
Чертежи




Описание
[001] Настоящее изобретение относится в целом к системам и способам для установления плановой траектории полета транспортного средства возле цели, а в частности, к способам определения плановой траектории полета воздушного транспортного средства, например, на удалении от цели.
УРОВЕНЬ ТЕХНИКИ
[002] Системы наведения, навигации и управления для воздушных транспортных средств включают в себя авиационное электронное оборудование на воздушном транспортном средстве и соответствующие наземные вспомогательные системы. Наведение воздушных транспортных средств часто управляется факторами, которые учитывают полезную нагрузку, или приборно-измерительную аппаратуру, воздушных транспортных средств и любые задачи по сбору информации воздушными транспортными средствами. Для некоторых задач может быть полезным, чтобы воздушное транспортное средство сохраняло плановую траекторию полета на удалении от цели или другую плановую траекторию, связанную с целью. Это может быть необходимо для получения качественных изображений посредством приборно-измерительной аппаратуры, например, посредством обеспечения для камер на воздушном транспортном средстве возможности получения изображений высокого качества с необходимого ракурса.
[003] Неопределенности и возможные ошибки в алгоритмах наведения и навигации могут сделать проблематичным поддержание плановой траектории воздушных транспортных средств. Кроме того, способы определения положения и скорости цели (или относительных положения и скорости по отношению к воздушным транспортным средствам) основаны на информации о положении воздушных транспортных средств, и, таким образом, может потребоваться точная информация о положении.
[004] Данные о положении и скорости цели в реальном времени и точное знание положения и скорости воздушных транспортных средств необходимы для определения плановой траектории, по которой должны следовать воздушные транспортные средства таким образом, чтобы цель постоянно оставалась в поле зрения воздушного транспортного средства. Существующие плановые траектории полета на удалении от цели для воздушных транспортных средств с неподвижным крылом или любых транспортных средств, которые неспособны или неэффективны при парении или сохранении своего положения, часто сложно приспособить к изменяющимся условиям вследствие заранее заданных параметров, и изменение ракурса цели для обзора приборно-измерительной аппаратурой может быть затруднено. В связи с этим существует необходимость в прогнозируемом и последовательно реализуемом способе определения плановой траектории, по которой должны следовать воздушные транспортные средства, относительно цели, при этом также должна быть обеспечена возможность обновления траектории по мере обновления положения цели.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[005] В одном примере описывается способ установления плановой траектории полета транспортного средства возле цели. В одном примере описывается способ создания траектории полета, смежной с мишенью для воздушного транспортного средства.
Способ включает определение расстояния удаленности до цели, которое обозначает расстояние от цели в точке на плановой траектории полета. Способ также включает выработку плановой траектории полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности.
[006] Еще в одном примере описывается некратковременный компьютерочитаемый носитель для хранения информации, имеющий сохраненные в нем инструкции, которые при их исполнении системой, имеющей один или более процессоров, побуждают систему реализовывать функции установления плановой траектории полета транспортного средства возле цели. Указанные функции включают определение расстояния удаленности до цели, которое обозначает расстояние от цели в точке на плановой траектории полета. Указанные функции также включают выработку плановой траектории полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности.
[007] Еще в одном примере описывается вычислительное устройство. Вычислительное устройство содержит интерфейс связи для приема значения расстояния удаленности до цели, которое обозначает расстояние от цели в точке на плановой траектории полета транспортного средства возле цели. Вычислительное устройство также содержит один или более процессоров для исполнения инструкций, сохраненных на устройстве хранения данных, для выработки плановой траектории полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности.
[008] Указанные признаки и функции могут быть реализованы независимо в различных вариантах раскрытия настоящего изобретения или могут быть скомбинированы в других вариантах реализации изобретения, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[009] Признаки иллюстративных вариантов реализации изобретения, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения. При этом иллюстративные варианты реализации изобретения, а также предпочтительный режим их применения, дополнительные цели и признаки будут лучше поняты из следующего подробного описания иллюстративного варианта реализации раскрытия настоящего изобретения при рассмотрении вместе с сопровождающими чертежами, на которых:
[0010] На ФИГ. 1 показана блок-схема системы согласно примерному варианту реализации изобретения.
[0011] На ФИГ. 2 показан пример системы, включающей в себя множество транспортных средств согласно примерному варианту реализации изобретения.
[0012] На ФИГ. 3 показаны примеры плановых траекторий полета, по которым должно (должны) следовать транспортное средство (транспортные средства) в координатной системе х-у, согласно примерному варианту реализации изобретения.
[0013] На ФИГ. 4 показан пример определения плановой траектории полета согласно примерному варианту реализации изобретения.
[0014] На ФИГ. 5 показан пример траектории приближения транспортного средства (транспортных средств) в направлении и вдоль плановой траектории полета согласно примерному варианту реализации изобретения.
[0015] на ФИГ. 6 показан пример траектории приближения транспортного средства (транспортных средств) в направлении и вдоль плановой траектории полета с зоной, закрытой для полетов, согласно примерному варианту реализации изобретения.
[0016] На ФИГ. 7 показан еще один пример траектории приближения транспортного средства (транспортных средств) в направлении и вдоль плановой траектории полета с зоной, закрытой для полетов, согласно примерному варианту реализации изобретения.
[0017] На ФИГ. 8 показан пример схемы последовательности операций наведения, навигации и управления для плановой траектории полета согласно примерному варианту реализации изобретения.
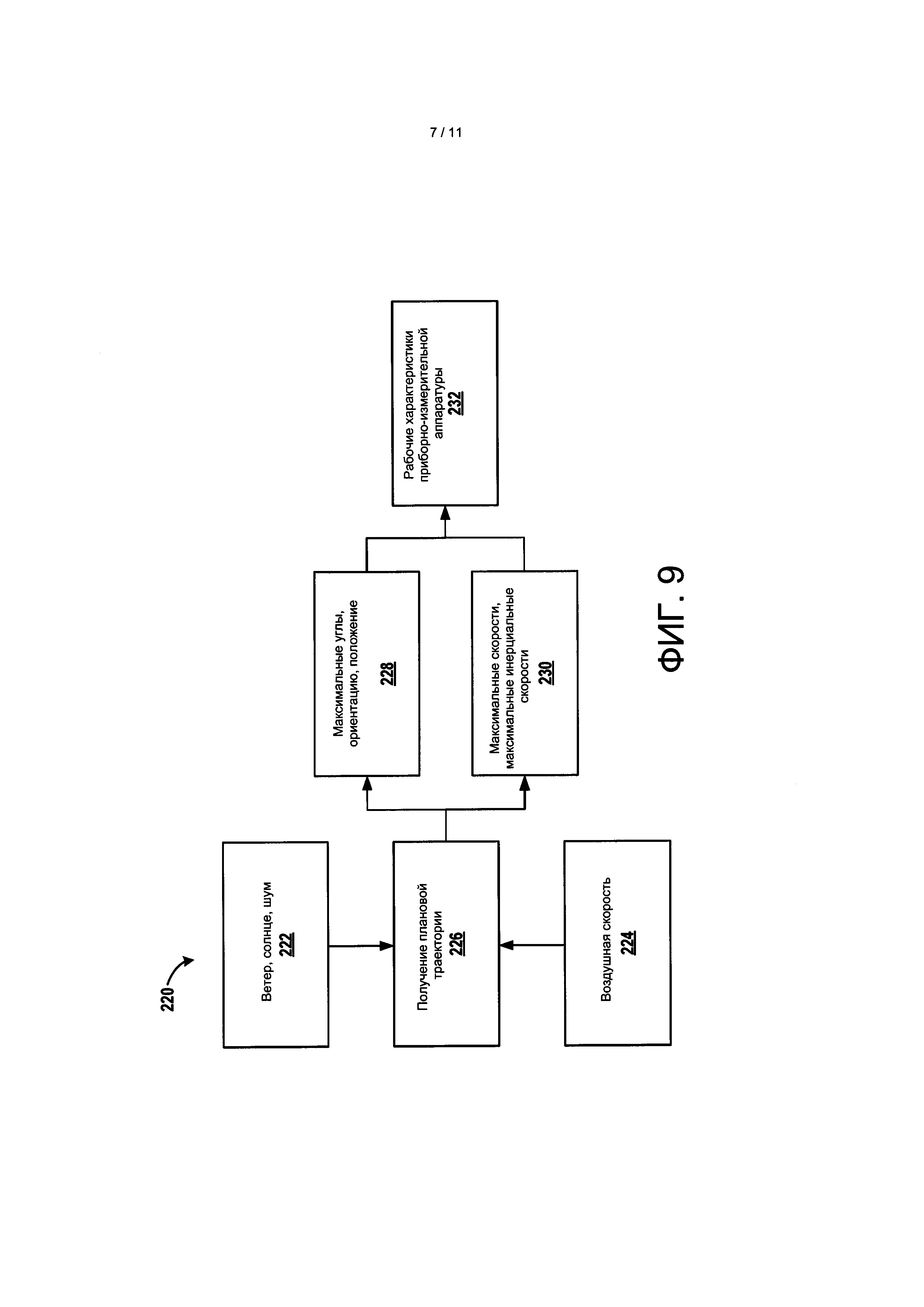
[0018] На ФИГ. 9 показан пример схемы последовательности операций для динамики и пределов приборно-измерительной аппаратуры, связанных с плановой траекторией полета, согласно примерному варианту реализации изобретения.
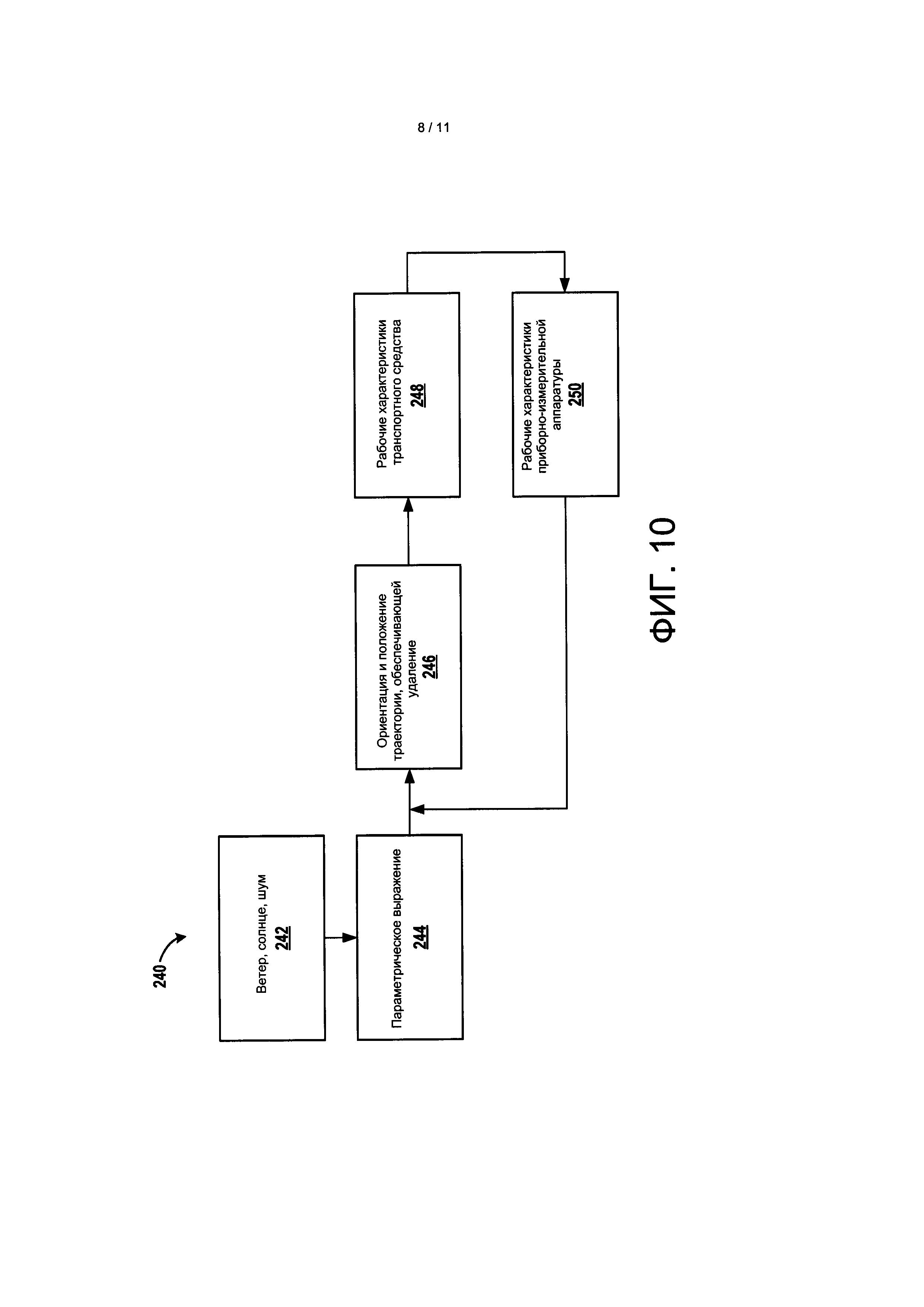
[0019] На ФИГ. 10 показан пример схемы последовательности операций оптимизации плановой траектории полета согласно примерному варианту реализации изобретения.
[0020] На ФИГ. 11 показана структурная схема примера способа установления плановой траектории полета воздушного транспортного средства (воздушных транспортных средств) возле цели согласно примерному варианту реализации изобретения.
[0021] На ФИГ. 12 показана структурная схема примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0022] На ФИГ. 13 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0023] На ФИГ. 14 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0024] На ФИГ. 15 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0025] На ФИГ. 16 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ 11, согласно примерному варианту реализации изобретения.
[0026] На ФИГ. 17 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0027] На ФИГ. 18 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0028] На ФИГ. 19 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
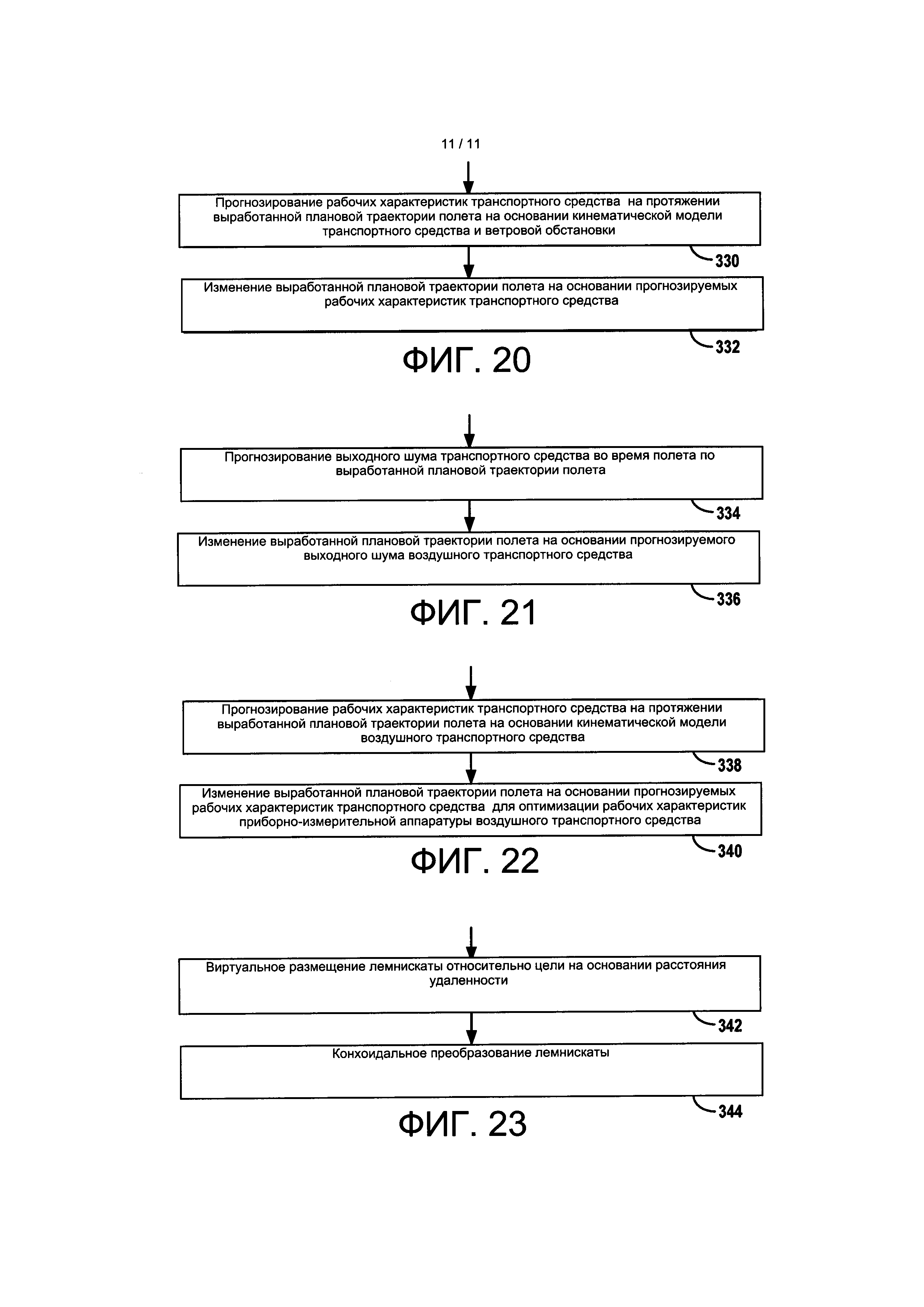
[0029] На ФИГ. 20 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0030] На ФИГ. 21 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0031] На ФИГ. 22 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
[0032] На ФИГ. 23 показана структурная схема еще одного примера способа для использования со способом, показанным на ФИГ. 11, согласно примерному варианту реализации изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0033] Раскрытые варианты реализации изобретения будут теперь более подробно описаны ниже со ссылкой на прилагаемые чертежи, на которых показаны некоторые, но не все раскрытые варианты реализации изобретения. Действительно, могут быть описаны несколько различных вариантов реализации изобретения, которые не должны рассматриваться как ограниченные вариантами реализации изобретения, изложенными в настоящем документе. Наоборот, эти варианты реализации изобретения описаны таким образом, что данное раскрытие изобретения будет исчерпывающим и завершенным и будет полностью представлять объем изобретения специалистами в данной области техники.
[0034] Сбор информации о целях или местоположениях целей или наблюдение за ориентиром (т.е. для сбора навигационной информации, такой как положение транспортного средства относительно ориентира) могут быть осуществлены транспортными средствами, выполняющими маневрирование возле цели или ориентира для наблюдения. Ракурс цели и качество изображений могут повлиять на качество информации. Таким образом, желательно выполнять наведение транспортных средств с учетом приборно-измерительной аппаратуры и задач по сбору информации. Для некоторых задач полезно обеспечить сохранение транспортным средством плановой траектории полета на удалении. Это может быть необходимо для получения качественных изображений посредством приборно-измерительной аппаратуры, например. Выражение "на удалении" означает, что транспортное средство не выполняет полет над целью или ориентиром или вокруг цели или ориентира. Примеры включают в себя сохранение подветренного положения относительно цели для уменьшения акустической заметности транспортного средства или обеспечение возможности использования биодатчиков, сохранение положения со стороны солнца относительно цели обеспечения лучшего ракурса изображений и сохранение наветренного положения относительно цели в условиях запыленности или задымленности.
[0035] В примерах, описанных ниже, описаны многочисленные плановые траектории полета, предназначенные для маневрирования вблизи цели, на основании различных соображений.
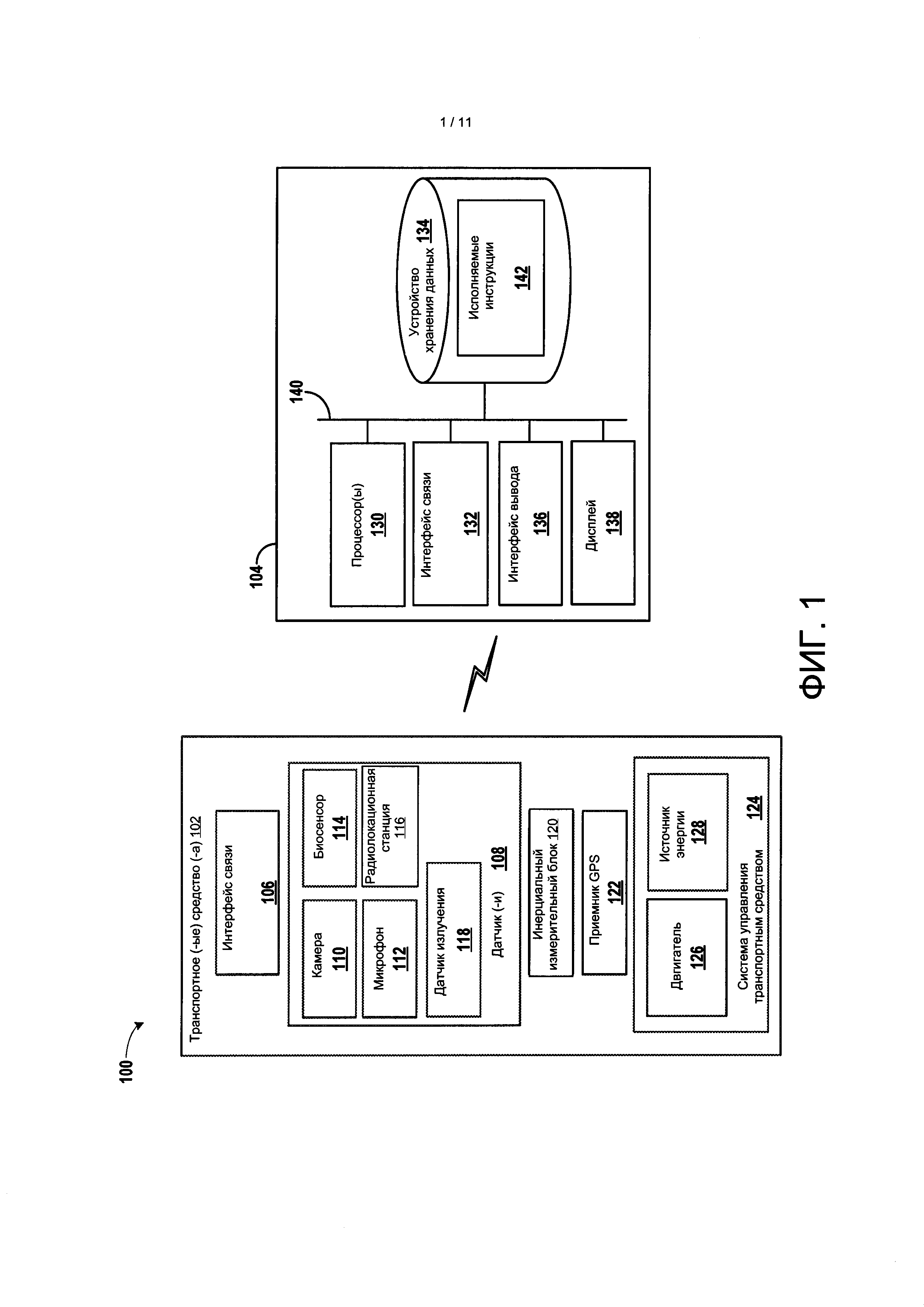
[0036] На ФИГ. 1 показана блок-схема системы 100 согласно примерному варианту реализации изобретения. Система 100 включает в себя одно или более транспортных средств 102, сообщающихся с вычислительным устройством 104.
[0037] Транспортное средство (транспортные средства) 102 может включать в себя автономное транспортное средство и может иметь форму множества различных типов транспортных средств, в том числе воздушного транспортного средства, включая крылатое воздушное транспортное средство, беспилотный летательный аппарат (БПЛА), дрон, винтокрылый летательный аппарат, мультикоптер, беспилотное транспортное средство, наземное транспортное средство, водное транспортное средство, подводное транспортное средство, помимо прочего.
[0038] Транспортное средство (транспортные средства) включают в себя интерфейс 106 связи, который может быть беспроводным интерфейсом и/или одним или более проводными интерфейсами, которые обеспечивают связь как на короткие, так и на большие расстояния с одной или более сетями или с одним или более удаленными устройствами, например, с вычислительным устройством 104. Такие беспроводные интерфейсы могут обеспечивать связь по одному или более протоколам беспроводной связи, таким как Bluetooth, Wi-Fi (например, протокол 802.11 стандарта Института инженеров по электротехнике и электронным инженерам (IEEE)), стандарт Long-Term Evolution (LTE), сотовая связь, WiMAX (например, стандарт ШЕЕ 802.16), протокол RFID (radio-frequency ID), технология ближней бесконтактной связи (near-field communication, NFC) и/или другие протоколы беспроводной связи. Такие проводные интерфейсы могут включать в себя интерфейс Ethernet, интерфейс универсальной последовательной шины (USB) или аналогичный интерфейс для связи через провод, витую пару проводов, коаксиальный кабель, оптическую линию, волоконно-оптическую линию или другое физическое соединение с проводной сетью.
[0039] Транспортное средство (транспортные средства) 102 также включает в себя датчики 108, которые могут включать в себя любое количество датчиков или датчики любого типа, включая камеру ПО, микрофон 112, биосенсор 114, радиолокационную станцию 116 и датчик 118 излучения. Датчики 108 обеспечивают для транспортного средства (транспортных средств) 102 возможность выявления объектов в окружающей среде. В качестве одного примера, микрофон 112 включает в себя звуковой датчик для определения акустической сигнатуры или уровня шума в окружающей среде. В качестве еще одного примера, радиолокационная станция 116 может определять расстояние до объекта или выявлять присутствие объекта и/или определять расстояние до объекта. Радиолокационная станция 116 также может включать в себя лидарную систему (light detection and ranging, LIDAR), ладарную систему (laser detection and ranging, LADAR) и/или систему инфракрасного радиолокационного устройство с прямым просмотром (infrared or forward-looking infrared, FLIR) систему, помимо прочего. Датчик 118 излучения может, например, обнаруживать или определять уровень излучения в атмосфере или окружающей среде.
[0040] Камера ПО может включать в себя систему формирования изображения, такую как видеокамера, для захвата данных об изображениях из окружающей среды. В качестве конкретного примера могут быть использованы, помимо прочего, ПЗС-камеры (прибор с зарядовой связью) или КМОП-камеры (комплементарная структура металл-оксид-полупроводник). Таким образом, камера ПО может включать в себя видеокамеру. Камера ПО также может включать в себя камеру ночного видения и/или инфракрасное радиолокационное устройство с прямым просмотром, или инфракрасную камеру. Камера ПО может захватывать изображения окружающей среды и сравнивать их с тем, что ожидается, с учетом текущей оценочной позиции, с тем чтобы способствовать навигации.
[0041] Микрофон 112 может быть выполнен с возможностью захвата звука из окружающей среды.
[0042] Биосенсор 114 (или биологический сенсор) включает в себя
преобразователь и биологический элемент, который может представлять собой фермент, антитело или нуклеиновую кислоту, которая взаимодействует с подвергаемым испытанию аналитом и преобразует биологическую реакцию с помощью преобразователя в электрический сигнал. Биосенсор 114 может обнаруживать, например, определенные химические вещества в окружающей среде. Биосенсор 114 также может быть выполнен в виде датчика температур.
[0043] Как показано на чертежах, транспортное средство (транспортные средства) 102 включает (включают) в себя дополнительные компоненты, в том числе инерциальный измерительный блок (inertial measurement unit, IMU) 120, который может включать в себя как акселерометр, так и гироскоп, которые могут быть использованы совместно для определения ориентации транспортного средства (транспортных средств) 102. В частности, акселерометр может измерять ориентацию транспортного средства (транспортных средств) 102 по отношению к Земле, а гироскоп измеряет скорость вращения вокруг оси. Инерциальный измерительный блок 120 может быть выполнен в виде или включать в себя миниатюрные микроэлектромеханическую систему (MEMS) или наноэлектромеханическую систему (NEMS). Также могут быть использованы инерциальные измерительные блоки других типов. Инерциальный измерительный блок 120 может включать в себя другие датчики, в дополнение к акселерометрам и гироскопам, которые могут способствовать лучшему определению и/или увеличению автономности транспортного средства (транспортных средств) 102. Двумя примерами таких датчиков являются магнитометры и датчики давления (или барометр), которые могут быть использованы для определения пространственного положения и высоты транспортного средства (транспортных средств) 102.
[0044] Транспортное средство (транспортные средства) 102 также может включать в себя приемник 122 глобальной системы определения местоположения (global position system, GPS), выполненный с возможностью предоставлять типичные данные хорошо известных систем GPS, такие как координаты GPS транспортного средства (транспортных средств) 102. Такие данные GPS могут быть использованы транспортным средством (транспортными средствами) 102 для различных функций, например, для перемещения к местоположению цели.
[0045] Транспортное средство (транспортные средства) 102 также может включать в себя систему 124 управления транспортным средством, включающую в себя двигатель 126 и источник 128 энергии. В зависимости от вида транспортного средства (транспортных средств) 102 могут быть использованы различные двигатели и источники энергии. Пример источника 128 энергии может включать в себя топливо или батареи для подачи питания на транспортное средство (транспортные средства) 102. Двигатель 126 может быть двигателем внутреннего сгорания или электрическим двигателем, в некоторых примерах.
[0046] Различные компоненты транспортного средства (транспортных средств) 102 включая интерфейс 106 связи, датчик(и) 108, инерциальный измерительный блок 120, приемник 122 GPS, систему 124 управления транспортным средством, в частности, могут быть названы основными средствами транспортного средства (транспортных средств) 102, которые обеспечивают для транспортного средства (транспортных средств) 102 возможность выполнения определенных задач. Различные транспортные средства могут иметь различную комбинацию основных средств в зависимости от конфигурации и использования транспортных средств.
[0047] Вычислительное устройство 104 имеет процессор(ы) 130, а также интерфейс 132 связи, устройство 134 хранения данных 134, интерфейс 136 вывода и дисплей 138, каждый из которых соединен с шиной 140 связи. Вычислительное устройство 104 также может включать в себя аппаратные средства для обеспечения связи внутри вычислительного устройства 104 и между вычислительным устройством 104 и другими устройствами (не показано). Аппаратные средства могут включать в себя, например, передатчики, приемники и антенны.
[0048] Интерфейс 132 связи может быть беспроводным интерфейсом и/или одним или более проводными интерфейсами, которые обеспечивают связь как на короткие, так и на большие расстояния с одной или более сетями или с одним или более удаленными устройствами. Такие беспроводные интерфейсы могут обеспечивать связь по одному или более протоколам беспроводной связи, таким как протоколы Very High Frequency (VHF) Data link (VDL), VDL Mode 2, адресно-отчетная система авиационной связи (Aircraft Communications Addressing and Reporting System, ACARS), цифровая связь УКВ радио и спутниковая связь (SATCOM), Bluetooth, Wi-Fi (например, протокол 802.11 стандарта Института инженеров по электротехнике и электронным инженерам (IEEE)), стандарт Long-Term Evolution (LTE), сотовая связь, технология ближней бесконтактной связи (NFC) и/или другие протоколы беспроводной связи. Такие проводные интерфейсы могут включать в себя шину данных летательного аппарата, например, интерфейсы по стандартам 429, 629 или 664 ARTNC (Aeronautical Radio, Incorporated), интерфейс Ethernet, интерфейс универсальной последовательной шины (Universal Serial Bus, USB) или аналогичный интерфейс для связи через провод, витую пару проводов, коаксиальный кабель, оптическую линию, волоконно-оптическую линию или другое физическое соединение с проводной сетью. Таким образом, интерфейс 132 связи может быть выполнен с возможностью приема входных данных от одного или более устройств, а также может быть выполнен с возможностью отправки выходных данных на другие устройства.
[0049] Интерфейс 132 связи также может включать в себя устройство пользовательского ввода, такое как клавиатура или мышь, например. В некоторых примерах интерфейс 132 связи принимает информацию, вводимую пользователем, такую как расстояние удаленности, на котором, например, должно (должны) следовать транспортное средство (транспортные средства) 102 соответственно до цели.
[0050] Устройство 134 хранения данных может включать в себя или быть выполненным в виде одного или более компьютерочитаемых носителей для хранения информации, которые могут быть считаны процессором (процессорами) 130 или доступ к которым может быть осуществлен процессором (процессорами) 130. Компьютерочитаемые носители для хранения информации могут включать в себя энергозависимые и/или энергонезависимые запоминающие компоненты, такие как оптическая, магнитная, органическая память или другое запоминающее устройство или дисковое хранилище, которые полностью или частично могут быть встроены в процессор (процессоры) 130. Устройство 134 хранения данных считается некратковременным компьютерочитаемым носителем информации. В некоторых вариантах реализации изобретения устройство 134 хранения данных может быть реализовано с использованием одного физического устройства (например, одного оптического, магнитного, органического или другого запоминающего устройства или блока диска для хранения), а в других вариантах реализации изобретения, устройство 134 хранения данных может быть реализовано с использованием двух или более физических устройств.
[0051] Устройство 134 хранения данных таким образом представляет собой некратковременный компьютерочитаемый носитель для хранения информации, на котором сохранены исполняемые инструкции 142. Инструкции 142 включают в себя исполняемый компьютером код. Когда процессор (процессоры) 130 исполняет (исполняют) исполняемые инструкции 142, процессор (процессоры) 130 побуждают реализовывать функции. Такие функции включают установление плановой траектории полета транспортного средства возле цели. Кроме того, такие функции также могут включать в себя определение расстояния удаленности до цели, которое обозначает расстояние от цели в точке на плановой траектории полета, и выработку плановой траектории полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности. Подробности приведенных в качестве примера функций описаны ниже.
[0052] Процессор (процессоры) 130 может (могут) представлять собой процессор общего назначения или процессор специального назначения (например, цифровые сигнальные процессоры, специализированные интегральные схемы и т.п.). Процессор (процессоры) 130 может (могут) принимать входные данные от интерфейса 132 связи и обрабатывать их с выработкой выходных данных, которые сохраняют в устройстве 134 хранения данных и выводят на дисплей 138. Процессор (процессоры) 130 может (могут) быть выполнен(ы) с возможностью исполнения исполняемых инструкций 142 (например, компьютерочитаемых программных инструкций), которые сохраняют в устройстве 134 хранения данных и которые выполнены с возможностью исполнения для обеспечения функциональности вычислительного устройства 104, описанного в настоящем документе.
[0053] Интерфейс 136 вывода выдает информацию на дисплей 138 или на другие компоненты. Таким образом, интерфейс 136 вывода может быть сходным с интерфейсом 132 связи и может быть беспроводным интерфейсом (например, передатчиком) или проводным интерфейсом. Интерфейс 136 вывода может отправлять инструкции на транспортное средство (транспортные средства) 102, указывающие на выполнение полета по выработанной плановой траектории полета, с тем чтобы следовать по траектории, обеспечивающей непрерывный обзор цели датчиком, установленным на носу транспортного средства (транспортных средств) 102, например.
[0054] Вычислительное устройство 104 может быть включено в состав нескольких различных транспортных средств, в том числе летательных аппаратов, автомобилей или лодок, например. В альтернативном варианте реализации вычислительное устройство 104 может быть включено в состав наземной станции, которая взаимодействует с различными транспортными средствами и управляет ими.
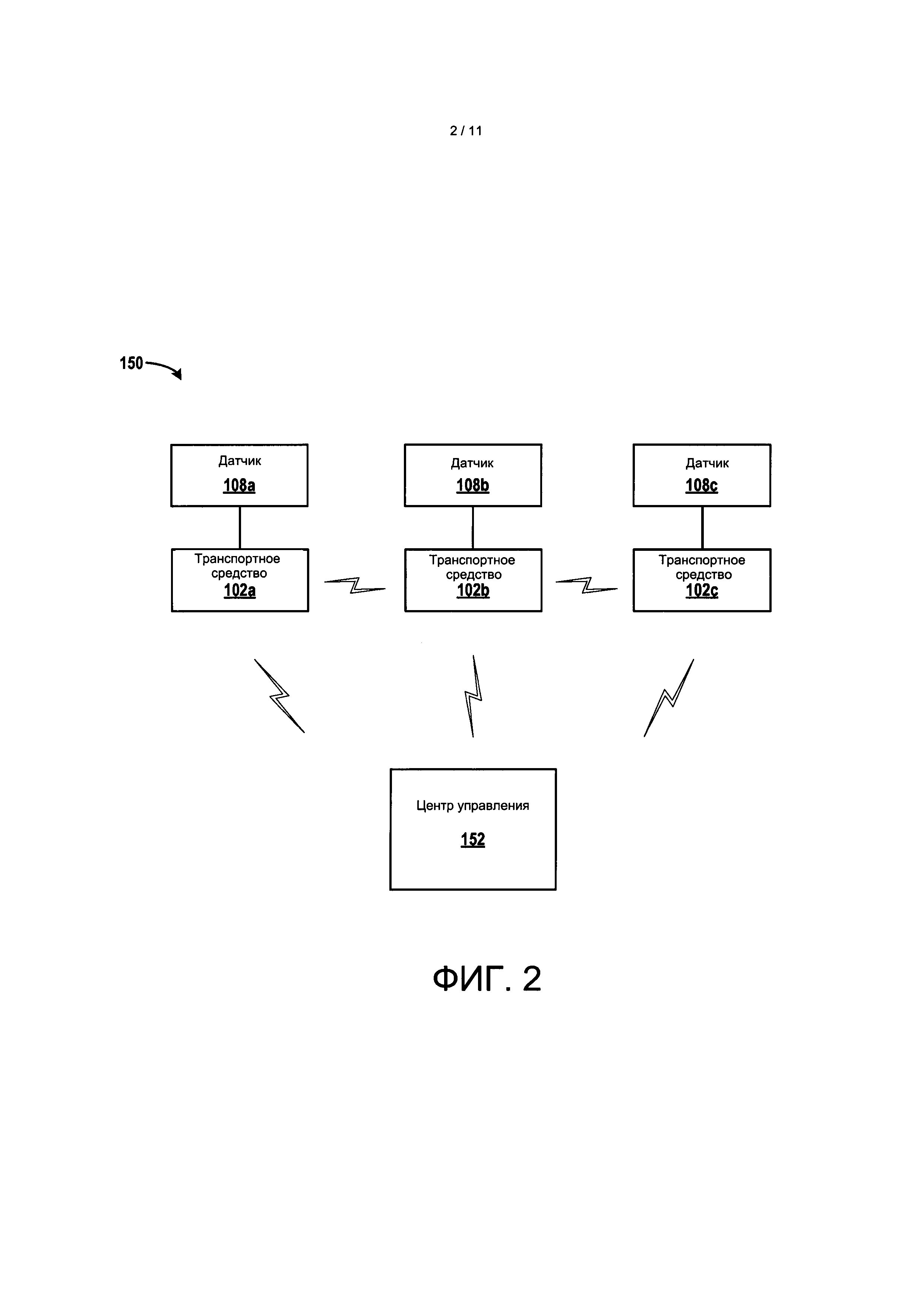
[0055] На ФИГ. 2 показана приведенная в качестве примера система 150, включающая в себя транспортное средство (транспортные средства) 102а-с, каждое из которых может включать в себя датчик(и) 108а-с.Транспортное средство (транспортные средства) 102а-с может включать в себя различные датчики или одни и те же датчики в зависимости от приложения или решаемой задачи. Система 150 также включает в себя центр 152 управления. Транспортное средство (транспортные средства) 102а-с имеет интерфейс 106 связи, обеспечивающий для транспортного средства (транспортных средств) 102а-с возможность беспроводной связи с центром 152 управления. Центр 152 управления может уведомить транспортное средство (транспортные средства) 102а-с о необходимости выполнения задач по мере необходимости.
[0056] Пример задачи включает маневрирование транспортного средства (транспортных средств) 102а-с в пределах плановой траектории полета на удалении для выполнения наблюдения за целью на удалении. Например, транспортное средство (транспортные средства) 102а-с может включать в себя камеры и может (могут) двигаться витками вокруг местоположения цели в том случае, если транспортное средство (транспортные средства) 102а-с не может (могут) зависать на месте. Приведенная в качестве примера траектория может иметь радиус 3000 футов (914 м) на высоте приблизительно 3000 футов (914 м). Однако в некоторых случаях может быть желательным, чтобы транспортное средство (транспортные средства) 102а-с не двигалось (двигались) витками вокруг местоположения цели, но при этом могло видеть местоположение цели или саму цель все время при полете по плановой траектории.
[0057] Приведенная в качестве примера траектория полета, по которой не выполняют витков вокруг местоположения цели, а позволяет видеть местоположение цели или саму цель все время при полете по плановой траектории включает в себя траекторию, имеющую форму восьмерки, по которой транспортное средство (транспортные средства) 102а-с всегда выполняет поворот в направлении цели.
[0058] На ФИГ. 3 показаны примеры плановых траекторий полета, по которым должно (должны) следовать транспортное средство (транспортные средства) 102 в координатной системе х-у, согласно примерному варианту реализации изобретения. На ФИГ. 3 показана цель 160 (или местоположение цели), и траектория 162, имеющая форму восьмерки, может быть проложена с одной стороны цели 160, так что транспортное средство (транспортные средства) не выполняет витков вокруг цели 160. Для выработки траектории 162, имеющей форму восьмерки, выбирают четыре промежуточных точки, образующие прямоугольник, и транспортное средство (транспортные средства) 102 совершает полет от точки к точке. Использование траектории 162, имеющей форму восьмерки, может обеспечить преимущества или может вызвать нежелательные переходы от точки к точке, которые нужны транспортному средству (транспортным средствам) 102 для совершения резких поворотов.
Траектория 162, имеющая форму восьмерки, может быть названа лемнискатной траекторией.
[0059] На ФИГ. 3 также показана приведенная в качестве примера плановая траектория полета, которая изменяет форму траектории 162, имеющей форму восьмерки, заданным образом, приводящим к получению плановой траектории 164 полета в виде конхоидального преобразования лемнискаты. Как показано на ФИГ. 3, плановая траектория 164 полета в виде конхоидального преобразования лемнискаты похожа на траекторию, имеющую форму уплощенной восьмерки.
[0060] Лемниската представляет собой траекторию, имеющую форму восьмерки и похожую на символ бесконечности. В частности, лемниската Бернулли представляет собой траекторию, имеющую форму уплощенной восьмерки и похожую на символ бесконечности.
[0061] Конхоида представляет собой пару математических кривых, полученных из существующей кривой С, линии L и точки О следующим образом. Пусть О является фиксированной точкой, и пусть линия L является линией через точку О, пересекающей кривую С в точке Q. Конхоидой кривой С относительно точки О являются такие местоположения точек Р1 и Р2 на линии L, что

где k является постоянной.
Это преобразование может быть использовано следующим образом: точка О является целью 160, линия L является линией визирования от транспортного средства (транспортных средств) 102 до цели 160, кривая С является лемнискатой, а конхоидальное преобразование является плановой траекторией 164 полета.
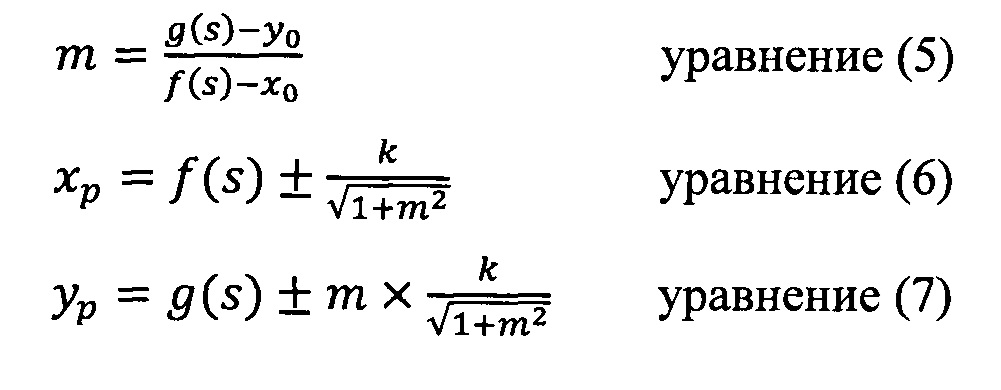
[0062] Линия L может быть описана так:

где m - наклон линии.
[0063] Затем параметрические выражения для конхоидального преобразования задаются следующим образом:


[0064] Лемниската Бернулли может быть выражена в виде функции независимого параметра "s" следующим образом:

где
s∈[0,2π) и
а - размерная постоянная.
[0065] Еще одним примером траектории 162, имеющей форму восьмерки, является лемниската Жероно, больше похожая на обычную восьмерку и менее плоская, применение которой к воздушному транспортному средству приводит к более мягкому развороту курса, а ее получение проще, чем лемнискаты Бернулли. Однако большее отклонение расстояния от цели может быть нежелательным. Лемниската Жероно вычисляется параметрически следующим образом:
ƒ(s)=a cos s уравнение (10)

[0066] Плановая траектория 164 полета может, например, проходить по лемнискате Бернулли или лемнискате Жероно. Конхоидальное преобразование упомянутой восьмерки приводит к получению плавной траектории, которой можно охватить широкий угол (например, 180°), с которым цель оказывается открытой наблюдению. Плановая траектория 164 полета может быть определена параметрически, как показано выше, что обеспечивает преимущества для представления данных наведения и навигации. Такое параметрическое представление данных обеспечивает для оператора системы возможность наблюдать за целью на удалении и в широком угле обзора. Плавная плановая траектория 164 полета, получаемая неэвристическими средствами, может быть сформирована с помощью нескольких параметров, что позволяет транспортному средству (транспортным средствам) 102 следовать по траектории, обеспечивающей непрерывный обзор цели 160 установленным на носу датчиком.
[0067] Комбинация лемнискатной траектории и конхоидального преобразования приводит к получению следующих параметрических выражений для плановой траектории 164 полета. Из двух указанных конхоидальных кривых плановая траектория полета может быть ограничена 'дальней'. Таким образом, ответы могут быть ограничены положительными функциями. Постоянные а и k известны априори исходя из необходимых геометрических параметров. Используя лемнискату Бернулли, координаты плановой траектории 164 полета определяют следующим образом:


где

[0068] Приведенные выше уравнения (12)-(14) определяют координаты плановой траектории 164 полета в аналитически закрытом виде, что позволяет получить простой и легко верифицируемый программный код, который исключает специальные конструкции.
[0069] На ФИГ. 4 показан пример определения плановой траектории 164 полета согласно примерному варианту реализации изобретения. Сначала выбирают цель 160 или местоположение цели. После этого выбирают ориентацию 166 плановой траектории 164 полета относительно цели 160. Ориентация 166 обозначает, с какой стороны транспортное средство (транспортные средства) 102 будет маневрировать (например, со стороны солнца, в подветренном положении и т.д.). Затем выбирают номинальное расстояние (d0) 168 удаленности от цели 160. В завершении выбирают необходимый сектор обзора 170. Примеры секторов обзора включают значения, например, от 0° до 180°. Ориентация 166, номинальное расстояние 168 удаленности и сектор обзора 170 связаны с проектными постоянными аналитического представления расстояния к, размера лепестков а лемнискаты и относительного местоположения лемнискаты и цели {х0, у0}. Вышеприведенное представление обеспечивает размещение у цели 160, ориентацию относительно цели 160 и масштабирование на основании возможностей транспортного средства (транспортных средств) 102 и приборно-измерительной аппаратуры.
[0070] Таким образом, в пределах примеров, плановая траектория 164 полета может быть определена на основании угла обзора 170 возле цели 160, которая можетвключать в себя определение размера лепестков лемнискаты.
[0071] В качестве одного примера, конфигурация по ФИГ. 4 может быть реализована в графической системе управления выполняемыми заданиями в наземной станции управления посредством выбора или ввода оператором цели 160, выбора или ввода промежуточной точки 172, обеспечивающей удаление, и выбора необходимого сектора обзора 170. Для определения размера траектории планового полета на удалении в приведенном выше примере, параметры а и k могут быть связаны в примере следующим образом. Например, выбирают номинальное расстояние do=1000 удаленности, а затем вычисляют
160 на промежуточную точку 172, обеспечивающую удаление, обеспечивает завершение ориентирования.
[0072] Например, алгоритмическая реализация может включать в себя назначение оператором промежуточной точки {xw,yw}, обеспечивающей удаление относительно цели, в точке {xt, yt], и вычисление номинального расстояние удаленности как:

[0073] Пеленг от цели вычисляют как:

где arctan2 относится к функции, обратной тангенсу, в четырех квадрантах.
[0074] Размерные параметры, обеспечивающие удаление, вычисляют как:


[0075] Затем лемнискату размещают в {х0,у0}, цель размещают в {0,-а}р.
[0076] Используя местоположение цели, вычисляют положение лемнискаты в навигационной системе координат, например в местной системе координат, имеющей ось, проходящую на север, ось, проходящую на восток, и вертикальную ось, как

где

[0077] В завершении, схема, обеспечивающая удаление, может быть повернута для получения необходимого пеленга от цели. Например, если для навигации использовать представление в местной системе координат, имеющей ось, проходящую на север, ось, проходящую на восток, и вертикальную ось, искомая траектория может быть получена как

[0078] Таким образом, в пределах примеров, плановая траектория 164 полета может быть определена на основании ориентации 166 плановой траектории 164 полета относительно цели 160, на основании угла обзора 170 или на основании сочетаний ориентации 166 и сектора обзора 170.
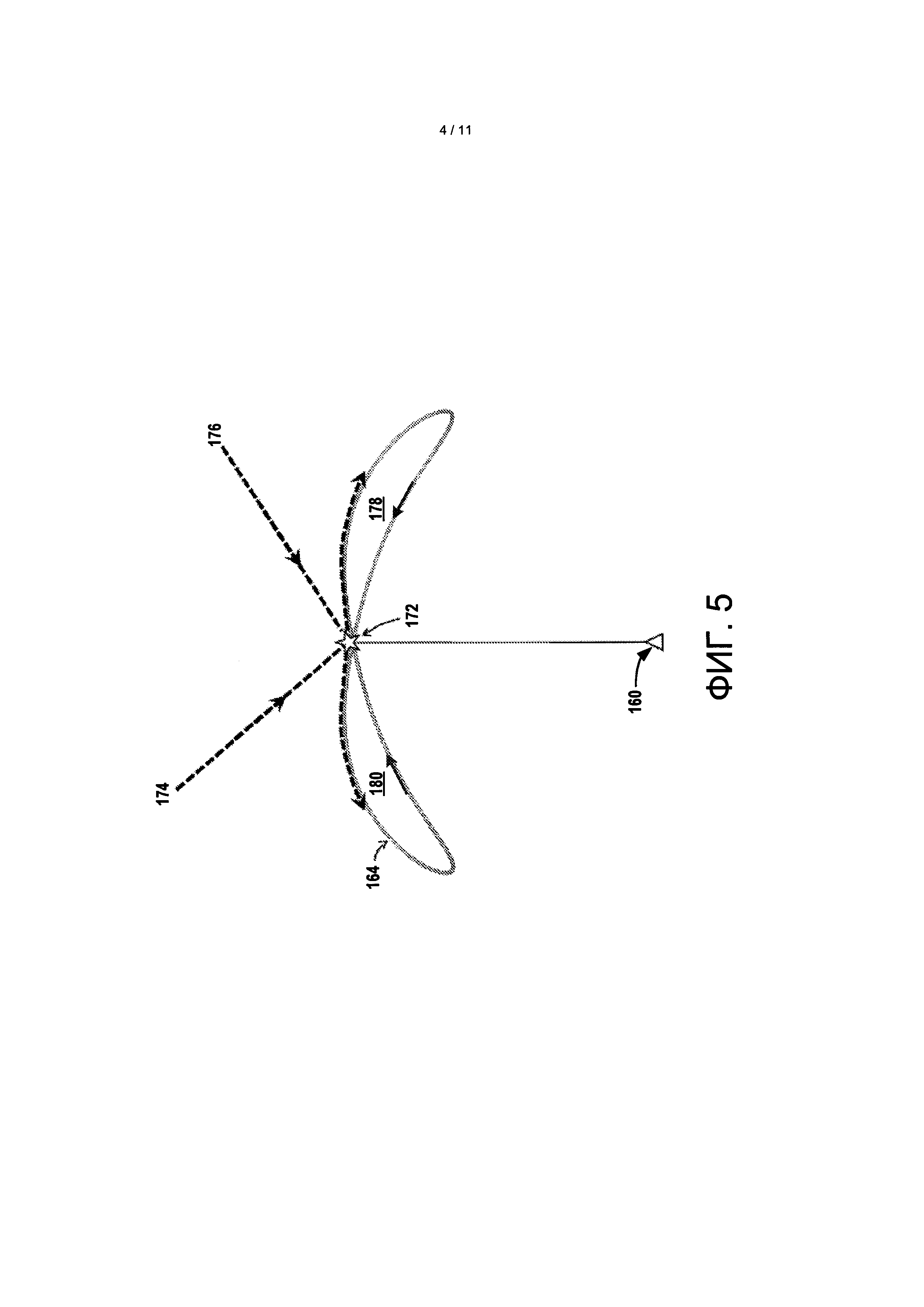
[0079] На ФИГ. 5 показан пример траектории приближения транспортного средства (транспортных средств) 102 вдоль плановой траектории 164 полета согласно примерному варианту реализации изобретения. На ФИГ. 5 транспортное средство (транспортные средства) 102 приближается (приближаются) к промежуточной точке, обеспечивающей удаление, с севера, и переходы к траектории полета отслеживания в пределах определенного расстояния расстоянии от промежуточной точки 172, обеспечивающей удаление. На ФИГ. 5 показаны два альтернативные траектории 174 и 176 приближения. Траектория 174 приближения показывает транспортное средство (транспортные средства) 102, приближающееся (приближающиеся) с северо-запада и перемещающееся (перемещающиеся) по плановой траектории 164 полета, показанной стрелками, сначала по лепестку 178, а затем по лепестку 180. Траектория 176 приближения показывает транспортное средство (транспортные средства) 102, приближающееся (приближающиеся) с северо-востока и перемещающееся (перемещающиеся) по плановой траектории 164 полета, показанной стрелками, сначала по лепестку 180, а затем по лепестку 178.
[0080] На ФИГ. 6 показан пример траектории приближения транспортного средства (транспортных средств) 102 по плановой траектории 164 полета с зоной, закрытой для полетов, согласно примерному варианту реализации изобретения. Как показано на ФИГ. 6, область в непосредственной близости от цели 160 может быть назначена в качестве зоны 182, закрытой для полетов, и плановая траектория 164 полета в виде конхоидального преобразования лемнискаты также может быть выработана на основании недопущения входа в назначенную зону 182, закрытую для полетов.
[0081] На ФИГ. 7 показан еще один пример траектории приближения транспортного средства (транспортных средств) 102 по плановой траектории 164 полета с зоной, закрытой для полетов, согласно примерному варианту реализации изобретения. Как показано на ФИГ. 7, еще одна область в непосредственной близости от цели 160 может быть назначена в качестве отличающейся зоны 184, закрытой для полетов, и плановая траектория 164 полета в виде конхоидального преобразования лемнискаты также может быть выработана на основании недопущения входа в назначенную зону 184, закрытую для полетов.
[0082] Логика наведения может быть использована для обеспечения траектории от текущего местоположения транспортного средства (транспортных средств) 102 до конечной цели 160 и возврата для восстановления своего местоположения. Плановая траектория 164 полета может быть скомбинирована наведением на основании логики следования по траектории для навигационного перемещения транспортного средства (транспортных средств) 102. Пропорционально может быть использована обратная связь по навигации. Если параметр "s" траектории управляется обратной связью относительно положения транспортного средства (транспортных средств) 102 вдоль траектории, позиция (т.е. положение и ориентация) транспортного средства (транспортных средств) вдоль плановой траектории 164 полета может поддерживаться следующим образом.
[0083] С учетом необходимой траектории, которая может быть параметризована как функция независимого параметра s, траектория задается координатами {xp(s), yp(s)}. Траектория может быть использована для наведения транспортного средства (транспортных средств) 102, например, с учетом системы Fs координат, перемещающейся по необходимой траектории в положение, задаваемое параметром s. Скорость и направление системы координат связаны с параметром s следующим образом.

и

[0084] Система Fs координат определена так, что она имеет ось xs, ориентированную вдоль вектора скорости


[0085] Продвижение по траектории определяется так:

[0086] Положение системы Fs координат вдоль заданной траектории указывается параметром s, то есть путем интегрирования уравнения (25). Численное интегрирование, например, может быть выполнено с помощью

где Δt - достаточно малое время интегрирования, и
где s0 - требуемая начальная точка на траектории.
Пусть {xs, ys} представляют положение транспортного средства (транспортных средств) 102 в системе Fs координат. Учитывая s, множество {xs, ys, Xs} вычисляют следующим образом. Пусть расстояние до цели определено как

[0087] Производными f; g; г по отношению к параметру s являются:



[0088] Производными координат положения траектории, обеспечивающей удаление, являются:


[0089] Необходимый курс на кривой затем получают из

[0090] При вышеописанной конструкции, если положение системы Fs координат определяется параметром s, то положение транспортного средства (транспортных средств) 102 определяется в этой системе координат как

[0091] Одним из примеров проецирования, используемым в построении наведения, является определение системы Fs как системы координат Френе-Серре. Положение транспортного средства (транспортных средств) 102 определяется в системе координат Френе-Серре как xs=0 (по определению) и

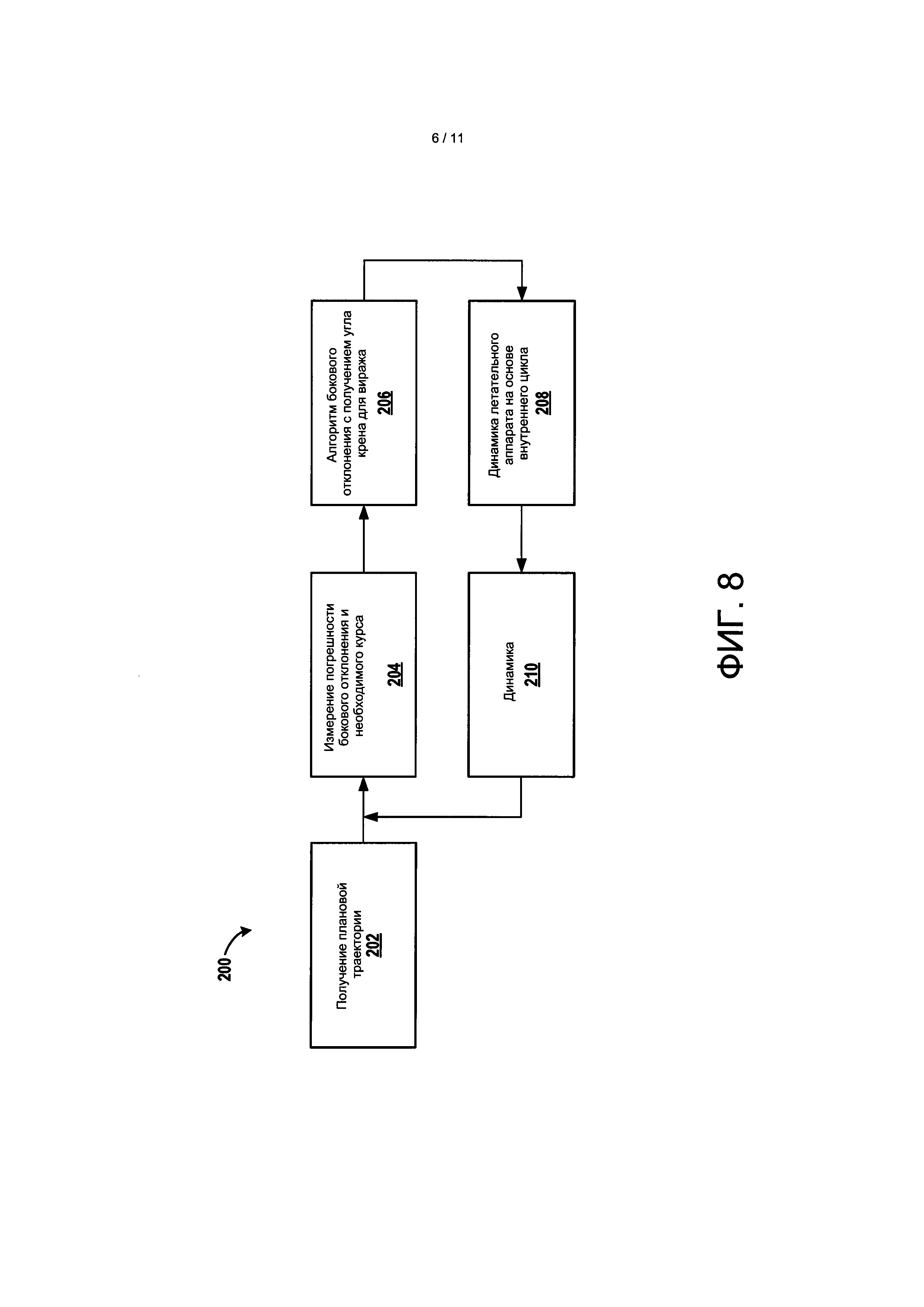
[0092] На ФИГ. 8 показан пример схемы последовательности 200 операций наведения, навигации и управления для плановой траектории 164 полета согласно примерному варианту реализации изобретения. Сначала в блоке 202 получают плановую траекторию, например, с использованием уравнений (12)-(14). После этого осуществляют измерение погрешности на боковое отклонение и необходимого курса транспортного средства (транспортных средств) 102, как показано в блоке 204. Погрешность на боковое отклонение относится к транспортному средству (транспортным средствам) 102, отклоняющемуся (отклоняющимся) от плановой траектории 164 полета, а необходимый курс показывает, как направить транспортное средство (транспортные средства) 102 назад к центральной линии плановой траектории 164 полета. Пример измерения курса может быть определен с использованием уравнения (33), и пример измерения погрешности на боковое отклонение может быть определен с использованием уравнения (34).
[0093] Затем реализуют алгоритм бокового отклонения с получением угла крена для виража, как показано в блоке 206, для определения виража транспортного средства (транспортных средств) 102, необходимого, чтобы оставаться на необходимом курсе, например. В блоке 208 реализуют динамику летательного аппарата на основе внутреннего цикла для управления транспортным средством (транспортными средствами) 102, чтобы следовать необходимым курсом. Функции блоков 206 и 208 могут быть реализованы, например, транспортным средством (транспортными средствами) 102.
[0094] Затем в контуре обратной связи рассматривается кинематика транспортного средства (транспортных средств) 102. Кинематика относится к пределам того, что транспортное средство (транспортные средства) 102 может делать во время полета. Некоторые воздушные транспортные средства могут быть не в состоянии следовать по определенным траекториям. Параметрическое представление траекторий,
обеспечивающих удаление, может быть использовано для прогнозирования рабочих характеристик воздушного транспортного средства и приборно-измерительной аппаратуры априори и приспособления траекторий, обеспечивающих удаление, для оптимизации ракурса приборно-измерительной аппаратуры. Например, путем объединения представления траекторий, обеспечивающих удаление, с кинематической моделью транспортного средства, способного выполнять скоординированные повороты и с учетом влияния ветра:





где
{xN, γE} - положение транспортного средства,
{wN, wE] - скорость ветра в направлении севера и востока,
Va - скорость относительно воздушной массы,
Vg - скорость относительно земли,
X - курс,

где входной сигнал u управления основан на задаваемом угле крена как u=tan φ, при этом угол крена ограничен ⎪φ⎪≤φmax.
Уравнения (36)-(40) могут быть использованы для определения кинематики транспортного средства (транспортных средств) 102, и последовательность 200 наведения, навигации и управления может быть выполнена, чтобы обеспечить итеративный поток сигналов для прогнозирующего устройства, которое может быть применено для такой оптимизации. Рабочие характеристики приборно-измерительной аппаратуры могут быть оценены путем соотнесения кинематики транспортного средства (транспортных средств) 102 с геометрическими характеристиками карданного подвеса и кинематикой конкретного оборудования на борту транспортного средства (транспортных средств) 102, и оценкой по сравнению с ожидаемыми скоростью и направлением ветра.
[0095] На ФИГ. 9 показан пример схемы 220 последовательности операций для динамики, связанной с плановой траекторией 164 полета, согласно примерному варианту реализации изобретения, с помощью которой прогнозируют рабочие характеристики датчика (датчиков) 108 приборно-измерительной аппаратуры. Сначала в блоке 222 учитывают входные данные по ветру, солнцу и шуму. Например, в условиях ветра транспортное средство (транспортные средства) 102 может нуждаться в компенсировании с полетом против ветра, с тем чтобы следовать по плановой траектории 164 полета. В качестве еще одного примера, на основании положения солнца или времени суток транспортное средство (транспортные средства) 102 и/или плановая траектория 164 полета могут быть соответственно расположены так, что камера не смотрит прямо на солнце. Таким образом, для ориентации плановой траектории 164 полета относительно цели 160 может учитываться определение положения плановой траектории 164 полета со стороны солнца относительно цели 160, определение наветренного положения плановой траектории 164 полета относительно цели 160 или определение подветренного положения плановой траектории 164 полета относительно цели 160.
[0096] Как показано в блоке 224, осуществляют ввод воздушной скорости транспортного средства (транспортных средств) 102, и затем в блоке 226 получают, например, плановую траекторию 164 полета. В блоке 228 учитывают максимальные углы, ориентацию и положение транспортного средства (транспортных средств) 102, а в блоке 230 учитывают максимальные скорости и максимальные инерциальные скорости. В блоке 232 также учитывают рабочие характеристики приборно-измерительной аппаратуры. Такая динамика позволяет априори определять, сможет (смогут) ли транспортное средство (транспортные средства) 102 выполнить полет по необходимой плановой траектории 164. Таким образом, для прогнозирования рабочих характеристик транспортного средства (транспортных средств) на протяжении выработанной плановой траектории 164 полета могут учитываться один или более из следующих факторов: кинематическая модель транспортного средства (транспортных средств), а также ветровая обстановка, положения солнца относительно транспортного средства (транспортных средств) и выходной шум транспортного средства (транспортных средств) 102 во время полета по выработанной плановой траектории 164 полета.
[0097] На ФИГ. 10 показан пример схемы 240 последовательности операций по оптимизации плановой траектории 164 полета согласно примерному варианту реализации изобретения, с помощью которой корректируют плановую траекторию 164 полета для улучшения рабочих характеристик датчика (датчиков) 108 приборно-измерительной аппаратуры. Сначала в блоке 242 учитывают ветер, солнце и шум, а в блоке 244 определяют параметрические значения плановой траектории 164 полета. В блоке 246 определяют ориентацию и положение траектории, обеспечивающей удаление, и рабочие характеристики транспортного средства (транспортных средств) 102, а также могут быть спрогнозированы рабочие характеристики датчика (датчиков) 108 приборно-измерительной аппаратуры, как показано в блоках 248 и 250, и результат этого затем может быть использован для последующего изменения плановой траектории 164 полета, с тем чтобы улучшить прогнозируемые рабочие характеристики транспортного средства (транспортных средств) 102 и датчика (датчиков) 108 приборно-измерительной аппаратуры.
[0098] На ФИГ. 11 показана структурная схема примера способа 300 установления плановой траектории 164 полета воздушного транспортного средства (воздушных транспортных средств) 102 возле цели 160 согласно примерному варианту реализации изобретения. Способ 300, показанный на ФИГ. 11, представляет вариант реализации способа, который может быть использован с системой 100, показанной, например, на ФИГ. 1, вычислительным устройством 104, показанным на ФИГ. 1, и/или центром 152 управления, показанным на ФИГ. 2. Кроме того, устройства или системы могут быть использованы или выполнены для реализации логических функций, представленных на ФИГ. 11. В некоторых случаях компоненты устройств и/или систем могут быть выполнены с возможностью реализации функций таким образом, что компоненты по существу выполнены с возможностью и имеют конфигурации (с помощью аппаратных средств и/или программным обеспечением) для обеспечения такой реализации. В других примерах компоненты устройств и/или систем могут быть выполнены с возможностью приспособления, выполнения или подстраивания к реализации функций, например, при работе определенным образом. Способ 300 может включать в себя одну или более операций, функций или одно или более действий, как показано одним или более блоками 302-304. Несмотря на то, что блоки показаны в последовательном порядке, эти блоки также могут быть выполнены параллельно и/или в другом порядке по сравнению с порядком, описанным в настоящем документе. Также, различные блоки могут быть объединены в меньшее количество блоков, разделены на дополнительные блоки и/или удалены исходя из необходимой реализации.
[0099] Следует понимать, что для этого и других процессов и способов, раскрытых в настоящем документе, структурные схемы показывают функциональные возможности и работу одного возможного осуществления настоящих вариантов реализации изобретения. В этом отношении, каждый блок может представлять модуль, сегмент или часть программного кода, который включает в себя одну или более инструкций, исполняемых процессором для реализации конкретных логических функций или этапов в этом процессе. Программный код может быть сохранен на компьютерочитаемом носителе информации или устройстве хранения данных, например, таком как устройство для хранения данных, в том числе диск или жесткий диск. Кроме того, программный код может быть закодирован на компьютерочитаемых носителях для хранения информации в машиночитаемом формате или на других некратковременных носителях или изделиях. Компьютерочитаемый носитель информации может включать в себя некратковременный компьютерочитаемый носитель информации или память, например, такие как компьютерочитаемые носители информации, которые сохраняют данные на небольшой период времени, например, регистровая память, кэш-память процессора и память с произвольным доступом (Random Access Memory, RAM). Компьютерочитаемый носитель информации также может включать в себя некратковременные носители, такие как вспомогательные средства хранения или средства для постоянного длительного хранения, например, постоянное запоминающее устройство (read only memory, ROM), оптические или магнитные диски, компакт-диск только для чтения (CD-ROM), например. Компьютерочитаемые носители информации также могут быть любыми другими энергозависимыми или энергонезависимыми системами для хранения. Компьютерочитаемый носитель информации может представлять собой, например, материальный компьютерочитаемый носитель для хранения информации.
[00100] Кроме того, каждый блок на ФИГ. 11, и в рамках других процессов и способов, раскрытых в настоящем документе, может представлять схему, подключенную для реализации конкретных логических функций в этом процессе. Альтернативные варианты реализации включены в объем примеров раскрытия настоящего изобретения, в которых функции могут быть выполнены в порядке, отличном от показанного или описанного, в том числе по существу одновременно или в обратном порядке, в зависимости от включенной функциональности, как будет очевидно специалистам в данной области техники.
[00101] В блоке 302, способ 300 включает определение расстояния 168 удаленности до цели 160, которое обозначает расстояние от цели 160 в точке на плановой траектории 164 полета.
[00102] В блоке 304 способ 300 включает выработку плановой траектории 164 полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности. Как уже описано, лемниската может включать в себя лемнискату Бернулли или лемнискату Жероно. В пределах примеров, плановую траекторию 164 полета вырабатывают так, что она похожа на траекторию, имеющую форму уплощенной восьмерки.
[00103] На ФИГ. 12 показана структурная схема примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 306 функции включают определение угла обзора 170 для плановой траектории 164 полета вокруг цели 160. В блоке 308 функции включают выработку плановой траектории 164 полета в виде конхоидального преобразования лемнискаты также на основании угла обзора 170. Определение угла обзора 170 может включать в себя определение размера лепестков лемнискаты, например.
[00104] На ФИГ. 13 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 310 функции включают определение ориентации 166 плановой траектории 164 полета относительно цели 160. В блоке 312 функции включают выработку плановой траектории 164 полета в виде конхоидального преобразования лемнискаты также на основании ориентации 166.
[00105] На ФИГ. 14 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 314 функции включают определение положения плановой траектории 164 полета со стороны солнца относительно цели 160.
[00106] На ФИГ. 15 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 316 функции включают определение наветренного положения плановой траектории 164 полета относительно цели 160.
[00107] На ФИГ. 16 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 318 функции включают определение подветренного положения плановой траектории 164 полета относительно цели 160.
[00108] На ФИГ. 17 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 320 функции включают назначение области в непосредственной близости от цели в качестве зоны 182/184, закрытой для полетов. В блоке 322 функции включают выработку плановой траектории 164 полета в виде конхоидального преобразования лемнискаты также на основании недопущения входа в назначенную зону 182/184, закрытую для полетов.
[00109] На ФИГ. 18 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 324 функции включают отправку посредством вычислительного устройства 104 инструкций на транспортное средство (транспортные средства) 102, указывающих на выполнение полета по выработанной плановой траектории 164 полета, с тем чтобы следовать по траектории, обеспечивающей непрерывный обзор цели 160 датчиком 108, установленным на носу транспортного средства (транспортных средств) 102.
[00110] На ФИГ. 19 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 326 функции включают прием в интерфейсе 132 ввода значения изменения расстояния 168 удаленности. В блоке 328 функции включают изменение выработанной плановой траектории 164 полета в реальном времени на основании указанного значения изменения расстояния 168 удаленности. В реальном времени обработка обозначает, что процессор(ы) 130 выполняет действия во время полета. Осуществляемая в реальном времени обработка может заключаться в непрерывной обработке данных для определения, следует ли транспортное средство (транспортные средства) 102 плановой траектории 164 полета, с тем чтобы выполнять корректировку. Иными словами, работа в режиме реального времени включает принятие решения об изменении плановой траектории 164 полета по существу сразу после приема значения изменения расстояния 168 удаленности. Под выражением "по существу" подразумевается, что точного получения указанной характеристики, указанного параметра или значения не требуется, и что могут иметь место отклонения или изменения, включая, например, допуски, погрешность измерения, ограничения точности измерения и другие явления, известные специалистам в данной области техники, величина которых не исключает получения технического результата, для обеспечения которого эта характеристика предназначена.
[00111] На ФИГ. 20 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 330 функции включают прогнозирование рабочих характеристик транспортного средства (транспортных средств) 102 на протяжении выработанной плановой траектории 164 полета на основании кинематической модели транспортного средства (транспортных средств) 102 и ветровой обстановки. В блоке 332 функции включают изменение выработанной плановой траектории 164 полета на основании прогнозируемых рабочих характеристик транспортного средства (транспортных средств) 102.
[00112] На ФИГ. 21 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 334 функции включают прогнозирование выходного шума транспортного средства (транспортных средств) 102 во время полета по выработанной плановой траектории 164 полета. В блоке 336 функции включают изменение выработанной плановой траектории 164 полета на основании прогнозируемого выходного шума транспортного средства (транспортных средств) 102.
[00113] На ФИГ. 22 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 338 функции включают прогнозирование рабочих характеристик транспортного средства (транспортных средств) 102 на протяжении выработанной плановой траектории 164 полета на основании кинематической модели транспортного средства (транспортных средств) 102. В блоке 340 функции включают изменение выработанной плановой траектории 164 полета на основании прогнозируемых рабочих характеристик транспортного средства (транспортных средств) 102 для оптимизации рабочих характеристик приборно-измерительной аппаратуры транспортного средства (транспортных средств) 102.
[00114] На ФИГ. 23 показана структурная схема еще одного примера способа для использования со способом 300, согласно примерному варианту реализации изобретения. В блоке 342 функции включают виртуальное размещение лемнискаты относительно цели 160 на основании расстояния 168 удаленности. В блоке 344 функции включают конхоидальное преобразование лемнискаты.
[00115] Примеры, описанные в настоящем документе, обеспечивают возможность прогнозируемого наблюдения на удалении, которое может быть точно задано оператором и учитывает возможность приборно-измерительной аппаратуры, установленной на носу. Эта возможность может быть включена в существующие алгоритмы и уменьшает необходимость в эвристическом кодировании, что приводит к снижению вероятности появления ошибок программного обеспечения и уменьшению работы, необходимой для управления качеством программного обеспечения. В пределах примеров, плановая траектория 164 полета может быть точно задана на основании прогнозируемой шумовой обстановки, точно задана для обеспечения нахождения транспортного средства (транспортных средств) 102 со стороны солнца (например, чтобы избежать отражения солнечного света), и точно задана для обеспечения непрерывного обзора. Еще одним примером обеспечиваемого преимущества выработки такой плановой траектории 164 полета является объединение приведенного аналитического выражения с кинематической моделью для обеспечения возможности прогнозирования, может (могут) ли транспортное средство (транспортные средства) 102 выполнить необходимую задачу в данных окружающих условиях.
Кроме того, приведенное раскрытие содержит варианты реализации изобретения согласно следующим пунктами:
Пункт 1. Способ установления плановой траектории полета транспортного средства возле цели, включающий:
определение расстояния удаленности до цели, которое обозначает расстояние от цели в точке на плановой траектории полета; и
выработку плановой траектории полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности.
Пункт 2. Способ по пункту 1, согласно которому лемниската содержит лемнискату Бернулли или лемнискату Жероно.
Пункт 3. Способ по пункту 1, согласно которому выработка плановой траектории полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности включает:
выработку плановой траектории полета так, чтобы она была похожа на траекторию, имеющую форму уплощенной восьмерки.
Пункт 4. Способ по пункту 1, также включающий: определение угла обзора для плановой траектории полета вокруг цели и выработку плановой траектории полета в виде конхоидального преобразования лемнискаты также на основании угла обзора.
Пункт 5. Способ по пункту 4, согласно которому выработка плановой траектории полета в виде конхоидального преобразования лемнискаты также на основании угла обзора включает:
определение размера лепестков лемнискаты.
Пункт 6. Способ по пункту 1, также включающий:
определение ориентации плановой траектории полета относительно цели и выработку плановой траектории полета в виде конхоидального преобразования лемнискаты также на основании ориентации.
Пункт 7. Способ по пункту 6, согласно которому определение ориентации плановой траектории полета относительно цели включает:
определение положения плановой траектории полета со стороны солнца относительно цели.
Пункт 8. Способ по пункту 6, согласно которому определение ориентации плановой траектории полета относительно цели включает:
определение наветренного положения плановой траектории полета относительно цели.
Пункт 9. Способ по пункту 6, согласно которому определение ориентации плановой траектории полета относительно цели включает:
определение подветренного положения плановой траектории полета относительно цели.
Пункт 10. Способ по пункту 1, также включающий:
назначение области в непосредственной близости от цели в качестве зоны, закрытой для полетов и
выработку плановой траектории полета в виде конхоидального преобразования лемнискаты также на основании недопущения входа в назначенную зону, закрытую для полетов.
Пункт 11. Способ по пункту 1, также включающий:
отправку посредством вычислительного устройства инструкций на воздушное транспортное средство, указывающих на выполнение полета по выработанной плановой траектории полета, с тем чтобы следовать по траектории, обеспечивающей непрерывный обзор цели датчиком, установленным на носу воздушного транспортного средства.
Пункт 12. Способ по пункту 1, также включающий:
прием в интерфейсе ввода значения изменения расстояния удаленности и
изменение выработанной плановой траектории полета в реальном времени на основании указанного значения изменения расстояния удаленности.
Пункт 13. Способ по пункту 1, также включающий:
прогнозирование рабочих характеристик воздушного транспортного средства на протяжении выработанной плановой траектории полета на основании кинематической модели воздушного транспортного средства и ветровой обстановки и
изменение выработанной плановой траектории полета на основании прогнозируемых рабочих характеристик воздушного транспортного средства.
Пункт 14. Способ по пункту 1, также включающий:
прогнозирование выходного шума воздушного транспортного средства во время полета по выработанной плановой траектории полета и
изменение выработанной плановой траектории полета на основании прогнозируемого выходного шума воздушного транспортного средства.
Пункт 15. Способ по пункту 1, также включающий:
прогнозирование рабочих характеристик воздушного транспортного средства на протяжении выработанной плановой траектории полета на основании кинематической модели воздушного транспортного средства и
изменение выработанной плановой траектории полета на основании прогнозируемых рабочих характеристик воздушного транспортного средства для оптимизации рабочих характеристик приборно-измерительной аппаратуры воздушного транспортного средства.
Пункт 16. Способ по пункту 1, причем способ выполняют посредством вычислительного устройства, имеющего один или более процессоров, и способ также включает:
виртуальное размещение лемнискаты относительно цели на основании расстояния удаленности и
конхоидальное преобразование лемнискаты.
Пункт 17. Некратковременный компьютерочитаемый носитель для хранения информации, имеющий сохраненные в нем инструкции, которые при их исполнении системой, имеющей один или более процессоров, побуждают систему реализовывать функции установления плановой траектории полета транспортного средства возле цели, при этом указанные функции включают:
определение расстояния удаленности до цели, которое обозначает расстояние от цели в точке на плановой траектории полета и
выработку плановой траектории полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности.
Пункт 18. Некратковременный компьютерочитаемый носитель информации по пункту 17, в котором указанные функции также включают:
определение угла обзора для плановой траектории полета вокруг цели;
определение ориентации плановой траектории полета относительно цели и
выработку плановой траектории полета в виде конхоидального преобразования лемнискаты также на основании угла обзора и ориентации плановой траектории полета относительно цели.
Пункт 19. Вычислительное устройство, содержащее:
интерфейс связи для приема значения расстояния удаленности до цели, которое обозначает расстояние от цели в точке на плановой траектории полета транспортного средства возле цели; и
один или более процессоров для исполнения инструкций, сохраненных на устройстве хранения данных, для выработки плановой траектории полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности.
Пункт 20. Вычислительное устройство по пункту 19, также содержащее:
интерфейс вывода для отправки инструкций на воздушное транспортное средство, указывающих на выполнение полета по выработанной плановой траектории полета, с тем чтобы следовать по траектории, обеспечивающей непрерывный обзор цели датчиком, установленным на носу воздушного транспортного средства.
Описание различных предпочтительных компоновок представлено в целях иллюстрации и описания, оно не является исчерпывающим или ограниченным вариантами реализации изобретения в раскрытой форме. Многие модификации и вариации окажутся очевидны специалистам в данной области техники. Кроме того, различные предпочтительные варианты реализации изобретения могут описывать различные преимущества по сравнению с другими предпочтительными вариантами реализации изобретения. Выбранный вариант или выбранные варианты реализации изобретения выбраны и описаны для того, чтобы наилучшим образом объяснить принципы вариантов реализации изобретения, практическое применение и дать возможность другим обычным специалистам в данной области техники понять раскрытие различных вариантов реализации изобретения с различными модификациями, которые подходят для конкретного рассматриваемого применения.
Реферат
Изобретение относится к способам определения плановой траектории полета воздушного транспортного средства возле цели. Вычислительное устройство содержит интерфейс связи для приема значения расстояния удаленности до цели, которое обозначает расстояние от цели в точке на плановой траектории полета транспортного средства возле цели. Вырабатывают плановую траекторию полета в виде конхоидального преобразования лемнискаты на основании расстояния удаленности. 3 н. и 17 з.п. ф-лы, 23 ил.
Комментарии