Гидравлическая система и система управления для нее - RU2776104C2
Код документа: RU2776104C2
Чертежи


Описание
Область техники
Предлагаемое изобретение относится к системе, содержащей гидравлическую систему и систему управления для нее. Предлагаемое изобретение также относится к способу управления гидравлической системой.
Уровень техники
Гидравлические системы используют гидроаккумуляторы давления для приема и хранения гидравлической текучей среды под давлением. Гидравлическая текучая среда под давлением может быть возвращена из аккумулятора давления в гидравлическую систему, если требуется. Следовательно, заданное количество энергии может храниться в аккумуляторе давления, чтобы вернуться для использования в гидравлической системе, например в один или более гидравлических приводов. Объемный расход гидравлической текучей среды может быть передан из аккумулятора давления в привод, который может поддерживаться в движении посредством упомянутого объемного расхода из аккумулятора давления.
Заданное максимальное количество гидравлической текучей среды может храниться в аккумуляторе давления так, чтобы, например, перемещение привода не могло поддерживаться неограниченное время, поскольку аккумулятор давления будет изношен, и обычно при этом его давление будет снижаться. Исчерпание объемного расхода гидравлической текучей среды может привести к таким изменениям в поведении привода, которые неуправляемы или нежелательны, такие как резкое снижение скорости привода.
Краткое описание изобретения
Гидравлическая система, образованная гидравлической системой согласно предлагаемому изобретению, и ее система управления будут заявлены в пункте 1 формулы изобретения. Некоторые примеры упомянутого изобретения будут представлены в других пунктах формулы изобретения.
Система согласно предлагаемому изобретению, приводимая в действие гидравлически, содержит напорную линию, обеспечивающую гидравлическую текучую среду под давлением; насос, выполненный с возможностью подачи гидравлической текучей среды под давлением в напорную линию; привод, соединенный с напорной линией для приема гидравлической текучей среды под давлением из напорной линии и для перемещения привода; клапанное устройство, выполненное с возможностью управления потоком гидравлической текучей среды под давлением из напорной линии в привод и скоростью привода; электронный блок управления, выполненный с возможностью отслеживания и управления функциями системы, чтобы управлять клапанным устройством посредством управляющего сигнала, который пропорционален требуемой скорости привода в любой заданный момент времени; аккумулятор давления, присоединенный к напорной линии, из которой аккумулятор давления может принимать гидравлическую текучую среду под давлением и к которой аккумулятор давления может, одновременно с насосом, подавать гидравлическую текучую среду под давлением для работы привода; датчик, выполненный с возможностью измерения, непосредственно или опосредованно, количества гидравлической текучей среды под давлением в аккумуляторе давления в любой заданный момент времени и выполненный с возможностью передачи измерительного сигнала, пропорционального упомянутому количеству гидравлической текучей среды под давлением, в электронный блок управления; и задающие устройства, выполненные с возможностью генерирования задающего сигнала и задания упомянутого управляющего сигнала пропорциональным скорости привода, требуемой в любой заданный момент времени.
В предложенном изобретении упомянутый электронный блок управления выполнен с возможностью ограничения целевой скорости привода так, чтобы не превышать заданную максимальную скорость, причем максимальная скорость пропорциональна количеству гидравлической текучей среды под давлением в аккумуляторе давления.
В примере предлагаемого изобретения электронный блок управления выполнен с возможностью ограничения целевой скорости привода максимальной скоростью, которая пропорциональна не только вышеупомянутому количеству, но также давлению гидравлической текучей среды под давлением в аккумуляторе давления.
В примере согласно настоящему изобретению, электронный блок управления выполнен с возможностью ограничения целевой скорости привода максимальной скоростью, которая пропорциональна не только вышеупомянутому количеству и давлению, но также мощности, сгенерированной приводом в любой заданный момент времени.
В способе согласно предлагаемому изобретению, целевая скорость привода ограничена так, чтобы не превышать заданную максимальную скорость, которая пропорциональна количеству гидравлической текучей среды под давлением в аккумуляторе давления.
Система согласно предлагаемому изобретению может быть использована в кране, который содержит стрелу для подъема и перемещения грузов, или в машине, которая может быть использована для подъема или перемещения грузов. Упомянутая стрела выполнена с возможностью ее перемещения упомянутой системой. Упомянутая стрела может быть размещена на самоходной машине.
Гидравлическая система управления согласно предлагаемому изобретению имеет преимущество максимального использования энергии, хранящейся в аккумуляторе давления, исключая резкое изменение скорости привода, вызванное истощением аккумулятора давления.
Описание чертежей
Предложенное изобретение будет описано более подробно далее, со ссылкой на сопроводительные чертежи.
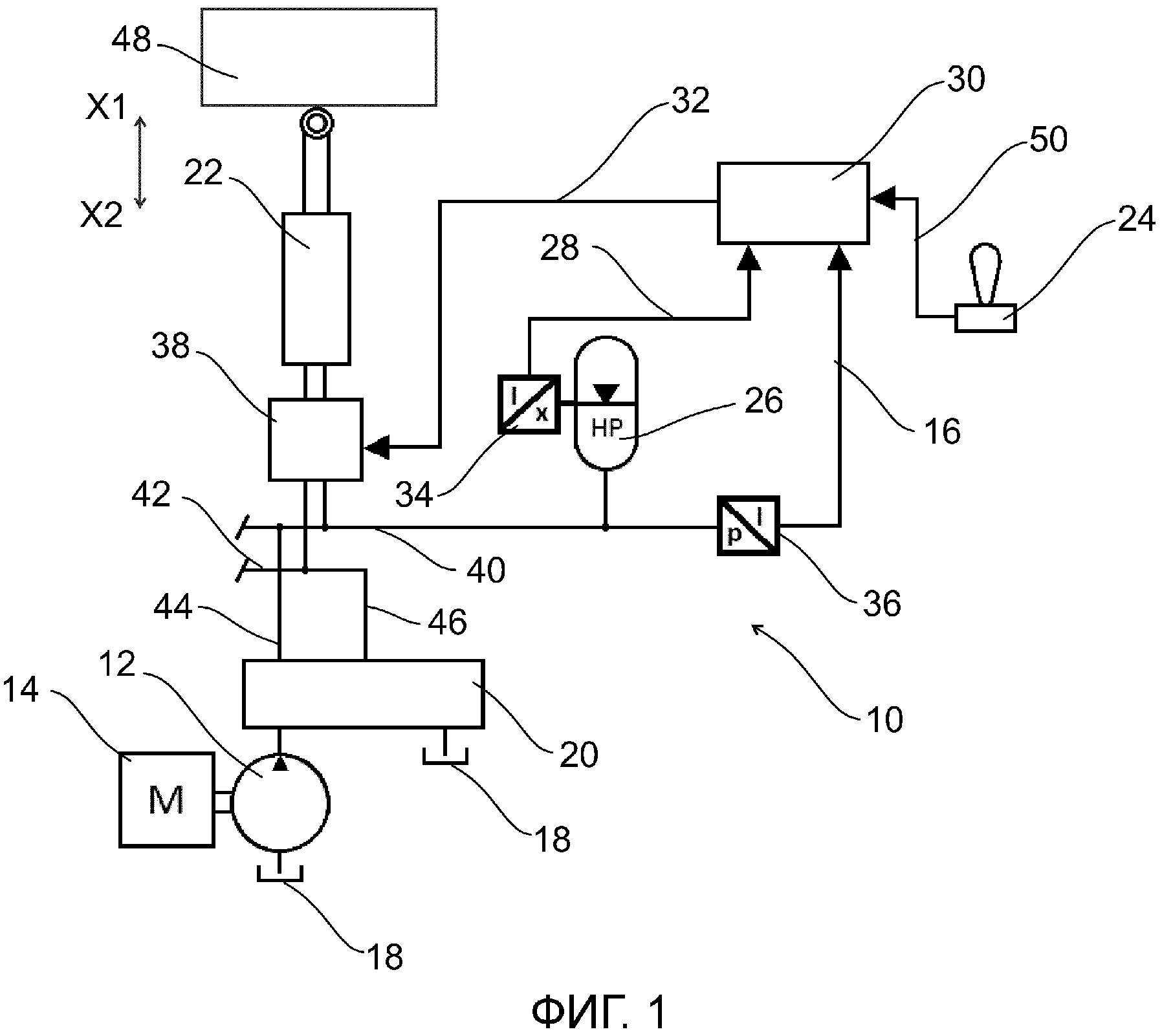
Фигура 1 показывает принцип осуществления гидравлической системы и ее системы управления, в которой предлагаемое решение может быть использовано.
Фигура 2 показывает принцип управления скоростью v привода системы по Фиг. 1, и задания его максимальной скорости vmax на основе количества V гидравлической текучей среды в аккумуляторе давления.
Подробное описание изобретения
Фигура 1 показывает пример гидравлической системы и системы управления для управления ею, где предлагаемое решение может быть использовано.
Гидравлическая система согласно предлагаемому изобретению и ее система управления, другими словами система 10, содержит напорную линию 40, по меньшей мере один привод 22, по меньшей мере одно клапанное устройство 38 для управления объемным расходом гидравлической текучей среды, по меньшей мере один гидравлический аккумулятор 26 давления, по меньшей мере один датчик 34 и/или датчик 36, по меньшей мере один гидравлический насос 12 и электронный блок 30 управления, управляющий работой системы 10.
Привод 22 может быть выполнен с возможностью перемещения груза 48, к которому привод прикладывает усилие, которое зависит от давления гидравлической текучей среды, подаваемого в привод 22, и от размера привода 22. Предпочтительно используется привод линейного перемещения, например гидравлический цилиндр, содержащий возвратно-поступательный поршень. Привод 22 выполнен с возможностью перемещения в двух противоположных направлениях X1 и X2. Когда гидравлическая текучая среда подается в привод 22, привод 22 или выдвигается и перемещается в направлении X1, или втягивается и перемещается в направлении X2. В примере, когда гидравлическая текучая среда отводится от привода 22, привод 22 перемещается в противоположном направлении по сравнению с ситуацией, в которой гидравлическая текучая среда подается в привод 22. Скорость привода 22, его поршня или груза 48 будет зависеть от размера привода 22 и объемного расхода гидравлической текучей среды, подаваемого в привод 22, то есть от потока гидравлической текучей среды в единицу времени, и объема привода 22.
Привод 22 присоединен к напорной линии 40 для подачи гидравлической текучей среды под давлением в привод 22. Клапанные устройства, такие как клапанное устройство 20, могут быть присоединены к напорной линии 40 для ограничения давления гидравлической текучей среды в напорной линии 40 заданным максимальным значением.
Привод 22 может являться [приводом] одностороннего действия или [приводом] двойного действия. Привод 22 может являться однокамерным, двухкамерным или многокамерным приводом. Для перемещения привода 22 гидравлическая текучая среда подается в одну или более камер привода 22 одновременно. Во время работы привода 22 гидравлическая текучая среда может выходить из одной или более камер привода 22 одновременно.
Насос 12 выполнен с возможностью подачи гидравлической текучей среды под давлением в напорную линию 40. Насос 12 присоединен к напорной линии 40 посредством, например, линии 44. Максимальный объемный расход и предельное давление гидравлической текучей среды, создаваемое насосом 12, будут зависеть от размера насоса 12.
Насос 12 является [насосом] с постоянным расходом или предпочтительно регулируемым поршневым насосом, в результате чего объемный расход, создаваемый насосом 12, может регулироваться, например, в пределах, ограниченных заданными минимальным и максимальным значениями. Насос 12 вращается двигателем 14. Двигатель 14 является, например, электродвигателем или двигателем внутреннего сгорания.
Насос 12 снабжается гидравлической текучей средой из, например, резервуара 18 для гидравлической текучей среды.
Гидравлическая текучая среда возвращается обратно из привода 22 в, например, другую напорную линию 42, в которой давление гидравлической текучей среды ниже, чем в напорной линии 40. Напорная линия 42 также может быть использована в качестве линии резервуара, через которую гидравлическая текучая среда, возвращающаяся из привода 22, будет течь в резервуар 18. Резервуар 18 присоединен к напорной линии 40 посредством, например, линии 46.
Система 10 может содержать клапанное устройство 20, посредством которого можно управлять доступом и потоком гидравлической текучей среды из насоса 12 в напорную линию 40, и наоборот. Клапанное устройство 20 может быть размещено, например, в линии 44. Клапанное устройство 20 также может быть выполнено с возможностью управления доступом и потоком гидравлической текучей среды из напорной линии 40 в резервуар 18. Клапанное устройство 20 может содержать один или более регулирующих клапанов.
Клапанное устройство 38 управляет потоком гидравлической текучей среды из напорной линии 40 в привод 22, например в и из одной или более его камер. Предпочтительно, клапанное устройство 38 также выполнено с возможностью перекрытия соединения и объемного расхода между напорной линией 40 и приводом. Клапанное устройство 38 управляет объемным расходом гидравлической текучей среды, от которого, в свою очередь, зависит скорость привода 22. Максимальный объемный расход, зависящий от размера клапанного устройства 38, одновременно определяет максимальную скорость привода 22. Для регулирования объемного расхода клапанное устройство 38 предпочтительно выполнено с возможностью электронного управления.
Клапанное устройство 38 может содержать один или более регулирующих клапанов, которые могут, например, являться пропорциональным направляющим клапаном, который имеет электронное управление и чей объемный расход пропорционален управляющему сигналу, принимаемому клапанным устройством 38. Упомянутый регулирующий клапан является, например, пропорциональным двухходовым двухпозиционным направляющим регулирующим клапаном. Упомянутый регулирующий клапан может являться клапаном с обратной связью по положению, клапаном с обратной связью по усилию или клапаном с обратной связью по скорости. Для каждой камеры привода 22 один регулирующий клапан или несколько параллельных регулирующих клапанов обеспечены для подачи гидравлической текучей среды из напорной линии 40 в привод 20. Альтернативно, упомянутые параллельные регулирующие клапаны могут являться, например, направляющими клапанами включения/выключения или запорными клапанами.
Клапанное устройство 38 управляется электронным блоком 30 управления, который может содержать, например, один или более электронных плат управления для управления клапанным устройством 38. Работа блока 30 управления состоит в генерации управляющего сигнала 32, например токового сигнала, для управления клапанным устройством 38.
Работа системы 10 отслеживается и управляется блоком 30 управления. Блок 30 управления предпочтительно является программируемым микропроцессорным устройством, которое исполняет один или более алгоритмов управления, хранящихся в его запоминающем устройстве, и выполняет вычислительные и логические функции. Блок 30 управления содержит интерфейс для подключения, например, сигналов, сгенерированных датчиками и устройствами управления, и для подключения управляющих сигналов, сгенерированных в блоке 30 управления. Упомянутые алгоритмы управления формируют, например на основе упомянутых сигналов, заданный управляющий сигнал в любой заданный момент времени. Блок 30 управления снабжен или может быть снабжен пользовательскими интерфейсными устройствами для управления работой блока 30 управления. Блок 30 управления может быть основан на программируемой логике или управляться компьютером под управлением управляющей программы или пользователя. Блок 30 управления может состоять из одного или нескольких отдельных устройств, или он может составлять распределенную систему, чьи различные части или устройства присоединены друг к другу или сообщаются друг с другом.
Управляющий сигнал 32 зависит от, например, скорости привода 22 или объемного расхода, который подлежит осуществлению клапанным устройством 38 в любой заданный момент времени. При генерировании упомянутого управляющего сигнала 32 может быть использован контроллер, такой как ПИД-контроллер, который применяется в блоке 30 управления и основан, например, на обратной связи по положению, обратной связи по усилию или обратной связи по скорости. Для [целей] управления система 10 может содержать датчики для измерения скорости привода 22 и для передачи упомянутого измерительного сигнала в блок 30 управления.
Система 10 также может содержать одно или более устройств 24 управления, присоединенных к блоку 30 управления с целью управления системой 10, например приводом 22 в ней. Устройство 24 управления является в одном примере рычагом управления, например, с ручным управлением. Рычаг управления приводится в действие пользователем. Устройство 24 управления выполнено с возможностью генерации задающего сигнала 50, зависящего от положения устройства 24 управления, например наклона рычага управления. Упомянутый задающий сигнал 50 является входным сигналом для блока 30 управления.
Альтернативно, упомянутый задающий сигнал 50 может быть введен при помощи устройств ввода, которые могут включать в себя, например, блок 30 управления или его часть, устройство, присоединенное к блоку 30 управления, или вышеописанное устройство 24 управления. В блоке 30 управления, задающий сигнал 50 может быть введен вручную посредством пользовательских интерфейсных устройств блока 30 управления, или он может быть сгенерирован программным обеспечением посредством запуска алгоритмов управления для воздействия на скорость привода 22.
Например, устройство 24 управления используется, чтобы управлять скоростью привода 22 так, чтобы скорость привода 22 была различна в различных положениях устройства 24 управления или рычага управления. Требуемая скорость привода 22 пропорциональна положению устройства 24 управления или рычага управления. Алгоритм управления блока 30 управления выполнен с возможностью управления клапанным устройством 38 на основе задающего сигнала 50 так, чтобы была достигнута требуемая скорость привода 22.
Аккумулятор 26 давления присоединен к напорной линии 40, из которой аккумулятор 26 давления может принимать гидравлическую текучую среду под давлением, и в которую аккумулятор 26 давления отдает гидравлическую текучую среду под давлением. Аккумулятор 26 давления имеет заданный эффективный объем, зависящий от его размера и пропорциональный максимальному количеству гидравлической текучей среды, которая может быть подана из аккумулятора 26 давления в напорную линию 40, например за данный период времени.
Аккумулятор 26 давления может являться грузовым аккумулятором, пружинным аккумулятором или предпочтительно газогидравлическим аккумулятором. Упомянутый газогидравлический аккумулятор является аккумулятором баллонного типа или аккумулятором мембранного типа, или предпочтительно аккумулятором поршневого типа. Для газогидравлического аккумулятора типично, что давление гидравлической текучей среды, содержащееся в нем, снижается по мере уменьшения количества упомянутой гидравлической текучей среды.
При необходимости, на основе вышеупомянутой зависимости, количество гидравлической текучей среды в аккумуляторе 26 давления может быть оценено посредством измерения давления упомянутой гидравлической текучей среды, например, в линии, к которой аккумулятор 26 давления присоединен, такой как напорная линия 40.
Для зарядки аккумулятор 26 давления может быть снабжен гидравлической текучей средой под давлением. Аккумулятор 26 давления имеет такие размеры, например, чтобы принимать гидравлическую текучую среду, когда давление гидравлической линии 40 равно или превышает заданное минимальное давление. Размер газогидравлического аккумулятора основан, например, на давлении предварительной зарядки газа, используемого в аккумуляторе давления. Упомянутое минимальное давление выбрано, например, меньше давления, преобладающего в напорной линии 40, например, когда груз 48 перемещается приводом 22 или когда привод 22 неподвижен.
Напорная линия 40 может быть снабжена датчиком 36, выполненным с возможностью измерения давления гидравлической текучей среды, содержащейся в напорной линии 40. Система 10 также может содержать другие датчики, которые измеряют давление гидравлической текучей среды и присоединены к блоку 30 управления, например для измерения давления в напорной линии 40.
Датчик 36 генерирует измерительный сигнал 16, который является, например, электронным, причем измерительный сигнал 16 пропорционален измеренному давлению. Сигнал является, например, токовым сигналом. Датчик 36 присоединен к блоку 30 управления для передачи измерительного сигнала 16 блоку 30 управления, где измерительный сигнал 16 является входным сигналом для алгоритма управления.
На основе измерительного сигнала 16, сгенерированного датчиком 36, количество гидравлической текучей среды в аккумуляторе 26 давления может быть измерено опосредованно путем измерения давления в напорной линии 40. Блок 30 управления выполнен с возможностью установления количества гидравлической текучей среды в аккумуляторе давления из, например, свойств аккумулятора 26 давления и упомянутого давления. В упомянутом установлении блок 30 управления может учитывать, например, известное поведение изменений, например, адиабатическое изменение, давления предварительной зарядки или объема газа в аккумуляторе 26 давления. В аккумуляторе 26 давления давление газа следует за давлением гидравлической текучей среды, которое, в свою очередь, склонно следовать за давлением в напорной линии 40, и объем газа, в свою очередь, зависит от давления газа.
В альтернативном варианте предлагаемого изобретения система 10 содержит датчик 34, присоединенный к аккумулятору 26 давления и выполненный с возможностью непосредственного или опосредованного измерения количества гидравлической текучей среды в аккумуляторе 26 давления. Датчик 34 может быть выполнен с возможностью измерения количества гидравлической текучей среды, например опосредованно, на основе измеренного положения подвижной части аккумулятора 26 давления, зависящего от количества гидравлической текучей среды. Упомянутая часть может являться, например, баллоном баллонного аккумулятора, мембраной мембранного аккумулятора или предпочтительно поршнем поршневого аккумулятора. Работа датчика 34 может быть основана на бесконтактном измерении, датчике линейного перемещения или устройстве с канатной тягой.
Датчик 34 генерирует измерительный сигнал 28, который является, например, электронным, причем измерительный сигнал 28 пропорционален количеству гидравлической текучей среды в аккумуляторе давления или вышеупомянутому измеренному положению. Сигнал является, например, токовым сигналом. Датчик 34 присоединен к блоку 30 управления для передачи измерительного сигнала 28 блоку 30 управления, где измерительный сигнал 28 является входным сигналом для алгоритма управления. Датчик 34 или блок 30 управления и его алгоритм управления может установить количество гидравлической текучей среды в аккумуляторе 26 давления, пропорциональное упомянутому измеренному положению.
При помощи датчика 34 может быть простым образом достигнут точный измерительный сигнал 28, когда неопределенности, относящиеся к измерению давления и поведению газа, подлежат исключению.
Аккумулятор 26 давления и насос 12 выполнены с возможностью подачи гидравлической текучей среды в привод 22 посредством напорной линии 40 и клапанного устройства 38 одновременно для перемещения привода 22. Таким образом давление гидравлической текучей среды, согласно первому примеру, имеет достаточную величину, чтобы перемещать по меньшей мере привод 22 и также груз 48 при необходимости. Величина груза 48 может быть различной или изменяться в различных ситуациях, в результате чего усилие, требуемое для его перемещения, может изменяться. Когда привод 22 и груз 48 неподвижны, давление может повыситься вплоть до максимального значения, заданного для напорной линии 40, и аккумулятор 26 давления может быть заряжен гидравлической текучей средой под давлением. Альтернативно, при достаточном повышении давления во время перемещения привода 22 и груза 48 аккумулятор 26 давления может быть заряжен гидравлической текучей средой под давлением.
Максимальный общий объемный расход, создаваемый аккумулятором 26 давления и насосом 12, будет определять максимальную скорость привода 22, поскольку объемный расход представляет собой количество гидравлической текучей среды, текущее в единицу времени. В предлагаемом решении максимальный объемный расход, создаваемый насосом 12, меньше упомянутого максимального общего объемного расхода. В примере, максимальный объемный расход, образуемый насосом 12, составляет 80%, 60%, 40% или 20% упомянутого максимального общего объемного расхода или меньше.
Скорость привода 22 управляется так, чтобы быть меньше упомянутой максимальной скорости путем использования клапанного устройства 38, которое управляется управляющим сигналом 32, сгенерированным блоком 30 управления на основе, например, задающего сигнала 50.
Аккумулятор 26 давления может находиться в состоянии, в котором общее количество гидравлической текучей среды в нем меньше количества гидравлической текучей среды, подлежащего подаче из аккумулятора 26 давления в привод 22, для перемещения привода 22 на требуемое или заданное расстояние с требуемой скоростью под управлением клапанного устройства 38 и, например, задающего сигнала 50.
В предложенном изобретении максимальный объемный расход, образуемый насосом 12, имеет такую величину, чтобы быть меньше объемного расхода гидравлической текучей среды, подлежащей подаче из напорной линии 40 в привод 22 для перемещения привода 22 с максимальной скоростью. В примере, максимальный объемный расход, образуемый насосом 12, имеет возможность генерировать 80%, 60%, 40% или 20% упомянутой максимальной скорости или меньше.
Система 10 может находиться в вышеописанной ситуации, в которой общее количество гидравлической текучей среды в аккумуляторе 26 давления недостаточно для обеспечения полного требуемого расстояния перемещения привода 22. Таким образом, по мере истощения аккумулятора 26 давления, скорость привода 22 может резко и неуправляемо снижаться относительно требуемой скорости, после чего перемещение привода 22 будет продолжено на скорости, зависящей от объемного расхода, создаваемого насосом 12.
В предложенном изобретении, цель состоит в исключении вышеописанной проблемы.
В предложенном изобретении, количество гидравлической текучей среды в аккумуляторе 26 давления в любой заданный момент времени управляется блоком 30 управления путем использования датчика 34 и/или датчика 36, как описано выше.
Блок 30 управления, под управлением алгоритма управления, выполнен с возможностью ограничения максимальной скорости привода 22 максимальным значением, пропорциональным количеству гидравлической текучей среды в аккумуляторе 26 давления. Следовательно, скорость привода 22 может управляться так, чтобы принимать только такое значение или величину, чтобы упомянутая скорость, при своем максимальном значении, была равна или меньше упомянутого максимального значения. Скорость привода 22 управляется клапанным устройством 38 и, например, задающим сигналом 50, как описано выше.
Поскольку ограничение основано только на количестве гидравлической текучей среды в аккумуляторе 26 давления, в части управления достигается простота работы.
Таким образом, когда используется вышеописанное ограничение, задающий сигнал 50 не может быть использован для регулирования скорости привода 22 до значения, которое превышает вышеупомянутое максимальное значение. Блок 30 управления управляет клапанным устройством 38 таким образом, что управляющий сигнал 32, сгенерированный блоком 30 управления и алгоритм управления теперь зависят не только от задающего сигнала 50, но также от количества гидравлической текучей среды в аккумуляторе 26 давления. Количество гидравлической текучей среды в аккумуляторе 26 давления, в свою очередь, измеряется датчиком 34 и/или датчиком 36.
Если система 10 содержит устройство 24 управления, заданное положение устройства 24 управления будет генерировать заданный задающий сигнал 50. Таким образом, когда используется вышеописанное ограничение, данное положение устройства 24 управления будет приводить к такой скорости привода 22, которая может быть меньше скорости, получаемой при таком же положении в ситуации, в которой вышеописанное ограничение не используется. В такой ситуации, пользователь устройства 24 управления будет обнаруживать замедление привода 22, даже если пользователь не будет изменять положение устройства 24 управления.
Посредством вышеописанного ограничения, возможно управлять изменением скорости привода 22, в результате чего резкое и неуправляемое снижение скорости, как описано выше, исключено.
Объемный расход, подаваемый аккумулятором 26 давления в привод 22, будет зависеть от размера соединений, напорной линии 40 и клапанного устройства 38, такого как номинальный размер регулирующего клапана. В вышеописанном способе, когда ограничение не используется, клапанное устройство 38 может управляться так, чтобы поток гидравлической текучей среды не ограничивался, и/или расходное(-ые) отверстие(-ия) одного или более регулирующих клапанов в нем было (были) максимальным(-ими). Когда ограничение используется, клапанное устройство 38 управляется так, чтобы поток гидравлической текучей среды ограничивался, и/или расходное(-ые) отверстие(-ия) одного или более регулирующих клапанов в нем было (были) выполнено(-ы) меньшим(-ими).
Согласно примеру предлагаемого изобретения, блок 30 управления, под управлением алгоритма управления, выполнен с возможностью ограничения скорости привода 22 вышеописанным образом, учитывая количество гидравлической текучей среды в аккумуляторе 26 давления, а также давление гидравлической текучей среды в аккумуляторе 26 давления. Упомянутое давление определяется, например, датчиком 36.
На основе упомянутого количества и давления, блок 30 управления устанавливает количество энергии, хранящейся в аккумуляторе 26 давления. Аккумулятор 26 давления подает энергию на основе его количества гидравлической текучей среды под давлением, которое может быть подано в данный момент времени и при данном объемном расходе. Целью является гарантия подачи энергии также путем ограничения мощности привода 22 так, чтобы его скорость одновременно ограничивалась требуемым образом. Скорость может быть определена, например, на основе усилия, генерируемого приводом 22, которое, в свою очередь, зависит от давления и размера привода 22.
Следовательно, в примере предложенного изобретения, блок 30 управления, под управлением алгоритма управления, выполнен с возможностью ограничения скорости привода 22 вышеописанным образом, учитывая количество гидравлической текучей среды в аккумуляторе 26 давления, давление гидравлической текучей среды в аккумуляторе 26 давления, а также давление, сгенерированное приводом 22. Упомянутое усилие определяется, например, датчиком или упомянутым давлением, когда размер привода известен.
В примере предложенного изобретения, блок 30 управления, под управлением алгоритма управления, выполнен с возможностью ограничения максимальной скорости привода 22 максимальным значением, которое уменьшается, когда количество гидравлической текучей среды в аккумуляторе 26 давления уменьшается; другими словами, она [скорость] тем ниже, чем меньше количество гидравлической текучей среды в аккумуляторе 26 давления.
В примере предложенного изобретения, вышеописанное ограничение применяется в качестве способа, когда количество гидравлической текучей среды в аккумуляторе 26 давления снизилось до значения, равного или меньшего, чем заданное предельное значение.
В примере, упомянутое заданное предельное значение количества гидравлической текучей среды в аккумуляторе 26 давления составляет 3%, 5%, 10%, 15%, 20% или 25% полезной вместимости аккумулятора 26 давления или максимального количества гидравлической текучей среды, которое может быть подано из аккумулятора 26 давления.
В примере, и дополнительно к тому, что было описано выше, блок 30 управления, под управлением алгоритма управления, выполнен с возможностью снижения максимальной скорости привода 22, при ее минимальном значении, до максимального значения, пропорционального объемному расходу, создаваемому насосом 12, например, равного или меньшего, чем максимальный объемный расход, создаваемый насосом 12.
Вышеописанная пропорциональность может быть основана на функции, основанной на количестве гидравлической текучей среды в аккумуляторе 26 давления, или она прямолинейно ниспадает или следует форме ниспадающей кривой, ввиду упомянутого количества гидравлической текучей среды, которое уменьшается.
Фигура 2 изображает на примере управление скоростью v привода 22 в системе 10 и определение максимальной скорости vmax, заданной для нее, основанной на количестве V гидравлической текучей среды в аккумуляторе 26 давления.
В примере по Фиг. 2 вышеописанная пропорциональность (смотри диапазон Q1+f(Q2)) прямолинейна; другими словами, она основана на функции. Упомянутая пропорциональность также может быть основана на функции, которая не является прямолинейной. Когда количество V гидравлической текучей среды имеет значение Vx, согласно предложенному изобретению, может быть установлено, что скорость v привода 22 имеет максимальное значение vmax. Таким образом, в таком диапазоне, также допустимы такие скорости привода 22, которые меньше заданного максимального значения.
В примере по Фиг. 2 также реализовано то, что вышеописанное ограничение применяется в качестве способа, когда количество гидравлической текучей среды в аккумуляторе 26 давления уменьшилось до уровня, равного или меньшего, чем заданное предельное значение. Когда ограничение не используется (смотри диапазон Q1+Q2), максимальное значение vmax скорости будет определяться, при ее максимальном значении, согласно общему объемному расходу, создаваемому насосом 12 и аккумулятором 26 давления вместе. Таким образом, в таком диапазоне, также допустимы такие скорости привода 22, которые меньше заданного максимального значения.
В примере по Фиг. 2 после того, как количество гидравлической текучей среды в аккумуляторе 26 давления существенно уменьшилось или израсходовалось, вышеописанное ограничение также применяется так, чтобы максимальная скорость привода 22 снизилась, при ее минимальном значении, до максимального значения, пропорционального максимальному объемному расходу, создаваемому насосом 12 (смотри диапазон Q1). В этом диапазоне также допустимы такие скорости привода 22, которые меньше заданного максимального значения. В этом случае, упомянутые скорости основаны только на объемном расходе, создаваемом насосом 12.
В примере по Фиг. 2 символ Q1 обозначает максимальный объемный расход, образуемый насосом 12, и символ Q2 обозначает объемный расход, создаваемый аккумулятором 26 давления и подаваемый в привод 22.
Вышеописанная гидравлическая система и ее система управления могут быть использованы в различных кранах для подъема и/или перемещения грузов. Для этого кран может быть снабжен стрелой, которая может быть выполнена с возможностью поворота в боковых направлениях посредством механизма поворота. Стрела может содержать подъемную стрелу, которая может являться телескопической. Стрела также может содержать перемещающую стрелу, которая шарнирно присоединена к подъемной стреле. Перемещающая стрела может являться телескопической. Вышеописанный привод 22 может являться приводом, в частности приводом линейного перемещения, для перемещения стрелы, перемещающей стрелы или подъемной стрелы, в результате чего вышеописанный груз 48 может являться одной стрелой, перемещающей стрелой или подъемной стрелой, или в сочетании с грузом, переносимым стрелой, перемещающей стрелой или подъемной стрелой. Вышеописанный кран и/или гидравлическая система и ее система управления могут быть использованы в различных машинах, которые могут быть использованы для подъема или перемещения грузов и которые могут являться самоходными машинами, управляемыми пользователем. Упомянутая машина является лесотехнической машиной, такой как форвардер или валочная машина, землеройная машина или машина для земляных работ. Упомянутая машина может содержать оборудование, такое как ковш, присоединенное к механизму для перемещения оборудования. Вышеописанный привод 22 может являться приводом для перемещения упомянутого механизма.
В описании выше, пропорциональность относится к такой пропорциональности между двумя различными переменными, функциями или множителями, которые могут быть представлены, например, математической зависимостью или функцией. Альтернативно или дополнительно, упомянутая пропорциональность относится к объединению или взаимозависимости между двумя различными переменными, функциями или множителями, в результате чего заданные состояния одной переменной, функции или множителя соответствуют заданным состояниям другой переменной, функции или множителя. Таким образом, одна переменная, функция или множитель может быть использована, чтобы управлять другой переменной, функцией или множителем, чтобы заставить систему согласно предложенному изобретению работать заданным образом.
Предложенное решение не ограничено только альтернативными выполнениями, примерами и вариантами выполнения, которые были представлены выше и которые не должны считаться единственными вариантами выполнения изобретения. В предложенном изобретении также возможно использовать сочетание вышеописанных альтернативных выполнений, примеров и вариантов выполнения для осуществления целей, представленных выше.
Осуществление предлагаемого изобретения будет определено более подробно в прилагаемой формуле изобретения.
Реферат
Гидравлическая система, содержащая: напорную линию (40); насос (12); привод (22); клапанное устройство (38), выполненное с возможностью управления потоком гидравлической текучей среды под давлением в привод (22); электронный блок (30) управления, выполненный с возможностью управления клапанным устройством (38) посредством управляющего сигнала (32), пропорционального требуемой скорости привода (10) в любой заданный момент времени; аккумулятор (26) давления, выполненный с возможностью подачи, вместе с насосом (12), гидравлической текучей среды под давлением для перемещения привода (22); датчик (34, 36), выполненный с возможностью измерения, непосредственно или опосредованно, количества гидравлической текучей среды под давлением в аккумуляторе (26) давления в любой заданный момент времени; задающие устройства, выполненные с возможностью задания задающего сигнала (50) пропорциональным требуемой скорости привода (22) в любой заданный момент времени. Электронный блок (30) управления выполнен с возможностью ограничения целевой скорости привода (22) так, чтобы не превышать заданную максимальную скорость, которая пропорциональна количеству гидравлической текучей среды под давлением в аккумуляторе (26) давления. В примере упомянутый датчик (34, 36) выполнен с возможностью измерения давления или количества гидравлической текучей среды в аккумуляторе (26) давления. В примере система обеспечена в кране, который может быть включен в состав машины. Технический результат - возможность управлять изменением скорости привода, в результате чего резкое и неуправляемое снижение скорости исключается, что дает преимущество максимального использования энергии, хранящейся в аккумуляторе давления. 4 н. и 16 з.п. ф-лы, 2 ил.
Комментарии