Линзовое устройство и фотокамера - RU2399942C2
Код документа: RU2399942C2
Чертежи





Описание
Предпосылки создания изобретения
Область техники, к которой относится изобретение
Изобретение относится к линзовому устройству, прикрепляемому к корпусу фотокамеры, системе фотокамеры, включающей в себя линзовое устройство, и фотокамере, имеющей оптический блок стабилизации изображения для снижения дрожания изображения, обусловленного вибрациями, например, дрожанием фотокамеры.
Описание уровня техники
В выложенной заявке №8-184870 на патент Японии рассмотрено оптическое устройство, имеющее оптический блок стабилизации изображения, предназначенный для снижения размытия изображения, вызываемого вибрациями, например, дрожанием фотокамеры.
Оптическое устройство, рассмотренное в выложенной заявке №8-184870 на патент Японии, имеет блок стабилизации изображения, поддерживаемый упругим элементом. В этом оптическом устройстве стопорный механизм для фиксации оптического блока стабилизации изображения не является необходимым в том случае, когда операция стабилизации изображения отключена.
В этом оптическом устройстве упругая сила упругого элемента задана из условия компенсации собственной массы блока стабилизации изображения. Поэтому блок стабилизации изображения устанавливается в совмещение с оптической осью при отключении операции стабилизации изображения.
Обычно оптические характеристики (или отсутствие оптической аберрации) фотографической оптической системы в большинстве случаев рассчитывают так, чтобы они были наилучшими в состоянии, когда оптическая ось не изогнута. В соответствии с этим, чем больше становится угол отклонения относительно оптической оси (то есть угол наклона оси выходящего света к оси падающего света), тем сильнее ухудшение качества изображения, например, повышается хроматическая аберрация или уменьшается яркость по краям.
Поэтому для получения наилучших оптических характеристик предпочтительно, чтобы оптический блок стабилизации изображения удерживался как можно ближе к оптической оси за счет повышения упругой силы упругого элемента с целью уменьшения степени опускания оптического блока стабилизации изображения под действием его собственной массы.
С учетом сбережения электрической энергии это находится в противоречии с требованием уменьшения упругой силы для снижения движущей силы, необходимой для перемещения оптического блока стабилизации изображения.
В выложенной заявке №7-199263 на патент Японии (соответствующей патенту США №6064826) рассмотрено изменение диапазона движения в направлении, перпендикулярном к оптической оси оптического блока стабилизации изображения, в соответствии с фокусным расстоянием фотографической оптической системы.
Однако в устройствах, рассмотренных соответственно в выложенной заявке №7-199263 на патент Японии и выложенной заявке №8-184870 на патент Японии, не учитывается изменение положения фотокамеры (например, изменение положения между вертикальной ориентацией и горизонтальной ориентацией). Поэтому оптический блок стабилизации изображения может сильно отклоняться от положения оптической оси. В соответствии с этим может осуществляться несоответствующая операция стабилизации изображения.
Сущность изобретения
Настоящее изобретение относится к линзовому устройству и фотокамере, в которых может осуществляться благоприятная операция стабилизации изображения в пределах допустимого диапазона оптических характеристик (например, оптической аберрации) в соответствии с изменением положения оптического устройства, такого, как линзовое устройство и фотокамера, и в которых может быть снижено потребление электрической энергии.
В соответствии с объектом настоящего изобретения оптическое устройство, такое, как линзовое устройство, система фотокамеры, включающая в себя сменный объектив, и фотокамера, включает в себя фотографическую оптическую систему, включающую в себя блок стабилизации изображения, поддерживаемый опорным элементом посредством множества упругих элементов, привод, сконфигурированный для приведения в движение блока стабилизации изображения в направлении, перпендикулярном к его оптической оси, блок обнаружения положения, сконфигурированный для обнаружения положения блока стабилизации изображения в направлении, перпендикулярном к оптической оси, блок определения гравитационного положения, сконфигурированный для определения гравитационного направления на основании выходного сигнала с блока обнаружения положения, задающий блок, сконфигурированный для задания положения удержания, в котором блок стабилизации изображения удерживается, на основании информации, относящейся к выходному сигналу гравитационного направления с блока определения гравитационного направления, и блок управления, сконфигурированный для управления приводом на основании информации, относящейся к положению удержания, с целью перемещения блока стабилизации изображения в положение удержания.
В соответствии с другим объектом настоящего изобретения оптическое устройство, такое, как линзовое устройство, система фотокамеры, включающая в себя сменный объектив, и фотокамера, включает в себя фотографическую оптическую систему, включающую в себя блок стабилизации изображения, поддерживаемый опорным элементом посредством множества упругих элементов, привод, сконфигурированный для приведения в движение блока стабилизации изображения в направлении, перпендикулярном к его оптической оси, блок обнаружения вибрации, сконфигурированный для обнаружения вибрации, блок обнаружения положения, сконфигурированный для обнаружения положения блока стабилизации изображения в направлении, перпендикулярном к оптической оси, блок определения гравитационного направления, сконфигурированный для определения гравитационного направления на основании информации, относящейся к целевому положению управления блока стабилизации изображения, определенной в соответствии с выходным сигналом с блока обнаружения вибрации, и на основании выходного сигнала с блока обнаружения положения, задающий блок, сконфигурированный для задания диапазона управления в направлении, перпендикулярном к оптической оси блока стабилизации изображения, на основании информации, относящейся к выходному сигналу гравитационного направления с блока определения гравитационного направления, и блок управления, сконфигурированный для управления приводом на основании выходного сигнала с блока обнаружения вибрации и информации, относящейся к диапазону управления, с целью перемещения блока стабилизации изображения.
Дополнительные признаки и объекты настоящего изобретения станут очевидными из нижеследующего подробного описания примеров осуществлений при обращении к приложенным чертежам.
Краткое описание чертежей
Сопровождающими чертежами, которые включены в описание и составляют часть его, иллюстрируются примеры осуществлений, признаки и объекты изобретения, и они вместе с описанием служат для пояснения принципов изобретения.
На чертежах:
фиг.1 - разрез, иллюстрирующий однообъективную зеркальную цифровую фотокамеру со сменным объективом в соответствии с примером осуществления настоящего изобретения;
фиг.2 - детализированный вид, иллюстрирующий механизм стабилизации изображения в соответствии с примером осуществления настоящего изобретения;
фиг.3 - структурная схема, иллюстрирующая систему однообъективной зеркальной фотокамеры со сменным объективом в соответствии с примером осуществления настоящего изобретения;
фиг.4 - блок-схема последовательности операций, иллюстрирующая работу системы фотокамеры, показанной на фиг.3;
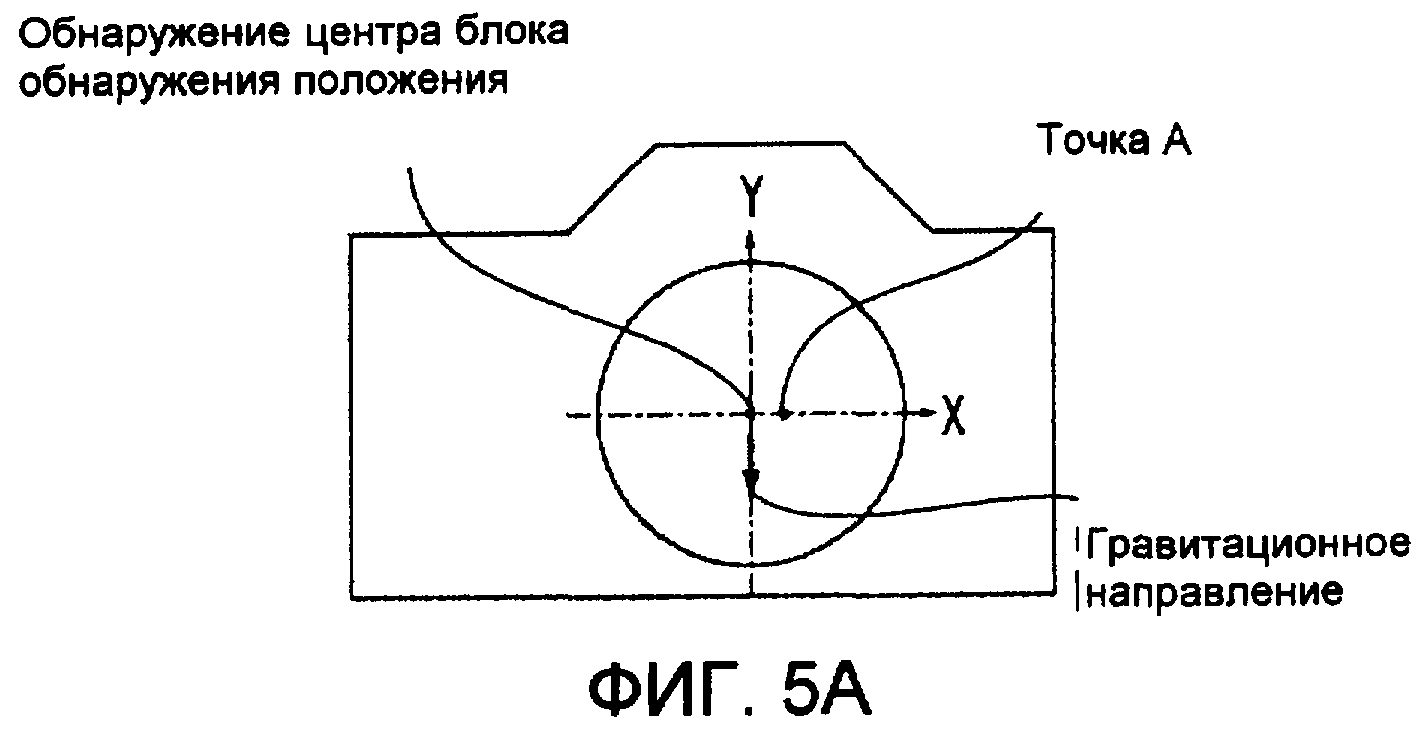
фиг.5А и 5В - схематичные виды, иллюстрирующие, каким образом определяется гравитационное направление;
фиг.6 - вид, иллюстрирующий диапазон коррекции, соответствующий каждому фокусному расстоянию; и
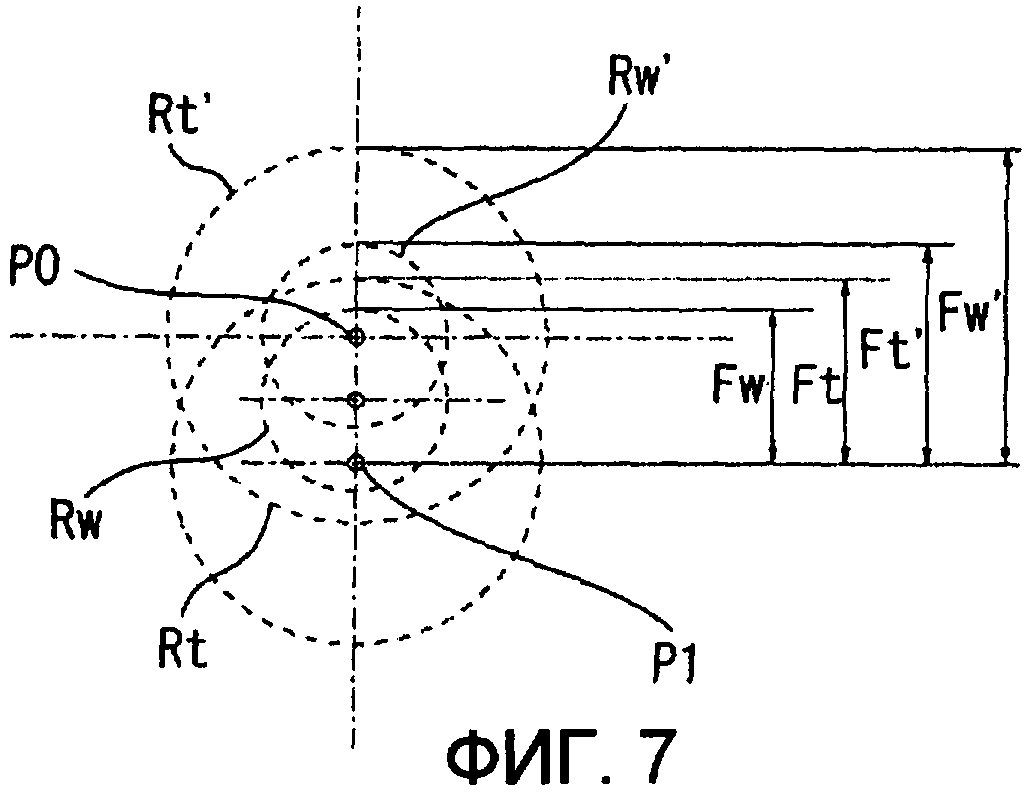
фиг.7 - вид, иллюстрирующий движущую силу, необходимую для стабилизации изображения в пределах диапазона коррекции, соответствующего каждому фокусному расстоянию.
Подробное описание осуществлений
Теперь различные примеры осуществлений, признаки и объекты изобретения будут описаны подробно со ссылками на чертежи.
На фиг.1 показана однообъективная зеркальная цифровая фотокамера со сменным объективом согласно примеру осуществления настоящего изобретения. Как показано на фиг.1, эта однообъективная зеркальная фотокамера включает в себя корпус 1 фотокамеры.
Сменный объектив 2 прикреплен к корпусу 1 фотокамеры.
То есть, однообъективная зеркальная цифровая фотокамера со сменным объективом согласно примеру осуществления настоящего изобретения представляет собой оптическое устройство, которое включает в себя корпус 1 фотокамеры и сменный объектив 2 с возможностью съема, прикрепленный к корпусу 1 фотокамеры.
Корпус 1 фотокамеры имеет следующие компоненты.
Зеркало 3 расположено на оптической оси светового потока, проходящего через сменный объектив 2 до начала фотографирования. Зеркало 3 отражает часть светового потока к оптической системе видоискателя. К тому же через зеркало 3 часть светового потока отводится к блоку 5 обнаружения фокусировки посредством вспомогательного зеркала 4. Во время фотографирования зеркало 3 отводится от оптической оси. Блок 5 обнаружения фокусировки включает в себя конденсорную линзу, которая расщепляет падающий световой поток на два световых потока, две разделительные линзы, которые повторно формируют изображения двух световых потоков, и датчик автоматической фокусировки (АФ) фазоразностного типа, линейные датчики, такие как приборы с зарядовой связью (ПЗС), которые осуществляют фотоэлектрическое преобразование двух повторно сфокусированных изображений объекта. Датчик 6 изображения, такой как датчик на основе комплементарной (КМОП) структуры металл-оксид-полупроводник, или датчик на основе прибора с зарядовой связью, на котором световой поток, проходящий через сменный объектив 2, формирует изображение во время фотографирования, осуществляет фотоэлектрическое преобразование сфокусированного изображения объекта.
Система оптического видоискателя включает в себя пентапризму 7 и оптический блок 8 видоискателя.
Фотографическая оптическая система, образующая сменный объектив 2, имеет следующие компоненты, а именно, первый линзовый блок 11, второй линзовый блок 12, подвижный при фокусировании, третий линзовый блок 13, подвижный при увеличении-вариации, и четвертый линзовый блок 14 (блок стабилизации изображения). Величина фотографического светового потока, проходящего через первый, второй, третий и четвертый линзовые блоки, ограничивается диафрагмой 15.
Второй линзовый блок 12 воспринимает движущую силу от приводного электродвигателя 16 автоматической фокусировки и перемещается вдоль оптической оси для осуществления фокусирования.
Третий линзовый блок 13 приводится в движение по направлению оптической оси передаточным механизмом кольца трансфокации (не показано). Кольцо трансфокации может приводиться в движение фотографом, а передаточный механизм преобразует создаваемую движением силу в движущую силу, действующую по направлению оптической оси с целью изменения увеличения.
Четвертый линзовый блок 14 (блок стабилизации изображения) воспринимает движущую силу от привода 18 стабилизации изображения, который приводится в движение на основании выходного сигнала обнаружения с датчика 17 обнаружения угловой вибрации, включающего в себя гироскоп. Поэтому четвертый линзовый блок 14 перемещается в направлении, перпендикулярном к оптической оси, с целью осуществления коррекции угловой вибрации путем изгибания оптической оси.
На фиг.2 подробно показаны блок 14 стабилизации изображения, который является подвижным в направлении, перпендикулярном к оптической оси, и привод 18 стабилизации изображения, изображенные на фиг.1. На фиг.2 линза 51, которая является компонентом блока 14 стабилизации изображения, удерживается оправой 52 линзы.
Оправа 52 линзы имеет штифт 52а, который находится в зацеплении в отверстии 56а с пазом, образованном в основной оправе 56 (описанной ниже), и поддерживает линзу 51 так, что линза 51 является подвижной в направлении, перпендикулярном к оптической оси. Кроме того, оправа линзы ограничивает наклон линзы 51 относительно направления оптической оси. В дополнение к этому оправа 52 линзы и основная оправа 56 имеют множество штифтов 52а и кулачков 56а, соответственно.
Катушка 53 возбуждения в целом прикреплена к оправе 52 линзы для приведения в движение оправы 52 линзы в вертикальном направлении. Катушка 53 возбуждения расположена с обращением к постоянному магниту (не показан), предусмотренному на основной оправе 56. На катушку 53 возбуждения может быть подано напряжение для создания движущей силы в вертикальном направлении.
Катушка 54 возбуждения в целом прикреплена к оправе 52 линзы с целью приведения в движение оправы 52 линзы в горизонтальном направлении. Катушка 54 возбуждения расположена с обращением к постоянному магниту (не показанному), предусмотренному на основной оправе 56. На катушку 54 возбуждения может быть подано напряжение для создания движущей силы в горизонтальном направлении.
Пружины сжатия 55 представляют собой упругие элементы, предназначенные для поджатия оправы 52 линзы с четырех направлений. Хотя в настоящем осуществлении пружина сжатия использована в качестве упругого элемента, вместо пружины сжатия может быть использована пружина растяжения. Настоящее осуществление включает в себя множество таких упругих элементов.
Когда катушки 53 и 54 возбуждения не находятся под напряжением, положение удержания оправы 52 линзы определяется балансом между упругой силой пружины 55 сжатия и собственной массой оптического блока 14 стабилизации изображения, который включает в себя линзу 51 и оправу 52 линзы. С другой стороны, когда катушки 53 и 54 возбуждения находятся под напряжением, положение оправы 52 линзы определяется балансом между упругой силой пружины 55 сжатия и суммой движущей силы, создаваемой катушками 53 и 54 возбуждения, и силы тяжести, обусловленной собственной массой оправы 52 линзы.
Основная оправа 56 (неподвижный элемент, то есть элемент, который не перемещается при стабилизации изображения) поддерживает весь оптический блок 14 стабилизации изображения посредством множества пружин 55 сжатия. Сенсорные магниты 57а и 57b в целом прикреплены к оправе 52 линзы.
Сенсорные магниты 57а и 57b обращены к элементам Холла (не показаны), прикрепленным к основной оправе 56. Сенсорные магниты 57а и 57b перемещаются совместно с оправой 52 линзы. Тем самым обнаруживается положение оптического блока 14 стабилизации изображения.
На фиг.3 представлена структурная схема, иллюстрирующая систему однообъективной зеркальной цифровой фотокамеры со сменным объективом, которая включает в себя корпус 100 фотокамеры и сменный объектив 200, соответствующие корпусу 1 фотокамеры и сменному объективу 2, показанным на фиг.1.
Центральный процессор (ЦП) 101 фотокамеры представляет собой микрокомпьютер.
Центральный процессор 101 фотокамеры управляет работой каждого узла в корпусе 100 фотокамеры. Когда сменный объектив 200 прикреплен к корпусу 100 фотокамеры, центральный процессор 101 фотокамеры посредством контакта 102 фотокамеры передает информацию на центральный процессор (ЦП) 201 объектива и принимает информацию от него.
Информация, передаваемая центральным процессором 101 фотокамеры на центральный процессор 201 объектива, включает в себя информацию об обнаружении состояния фокусировки. Контакт 102 фотокамеры включает в себя контакт передачи сигналов, предназначенный для передачи сигналов на сменный объектив 200, и контакт электропитания, предназначенный для подачи электропитания на сменный объектив 200.
Выключателем 103 электропитания может управлять пользователь.
Центральный процессор 101 фотокамеры начинает работу при воздействии на выключатель 103 электропитания. В таком случае каждый привод и каждый датчик в системе могут снабжаться электрической энергией, а система может функционировать.
Двухпозиционным пусковым переключателем 104 движкового типа может управлять пользователь.
Выходной сигнал с пускового переключателя 104 является входным сигналом для центрального процессора 101 фотокамеры. Центральный процессор 101 фотокамеры выполняет следующее действие в ответ на выходной сигнал с пускового переключателя 104.
Когда выходной сигнал с пускового переключателя 104 является сигналом включения переключателя SW1 при первом нажатии, центральный процессор 101 фотокамеры побуждает фотометрическую схему 105 определять экспозиционное число. Кроме того, схемой 106 обнаружения состояния фокусировки, включающей в себя датчик автоматической фокусировки, осуществляется обнаружение состояния фокусировки объекта в зоне обнаружения автоматической фокусировки.
В соответствии с результатом обнаружения состояния фокусировки центральным процессором 101 фотокамеры определяется величина смещения второго линзового блока 12. Затем операция фокусировки выполняется путем перемещения второго линзового блока 12 в сменном объективе 200. Таким образом, система становится подготовленной для фотографирования.
Когда обнаруживается, что приведен в действие переключатель SW2 при втором нажатии, центральный процессор 101 фотокамеры посылает команду на управление диафрагмой в центральный процессор 201 объектива, предусмотренный в сменном объективе 200.
Затем центральный процессор 101 фотокамеры передает команду начала экспонирования на схему 107 экспонирования для выполнения операции подъема зеркала и спуска затвора. После этого в блоке 108 формирования изображения выполняется фотоэлектрическое преобразование изображения объекта, сформированного фотографической оптической системой.
Преобразованные фотоэлектрическим способом сигналы дополнительно преобразуются в цифровые данные блоком 109 обработки сигналов. Из него цифровые данные выводятся в качестве данных изображения.
Данные изображения регистрируются блоком 110 регистрации изображения на носителе информации, таком, как полупроводниковое запоминающее устройство (флэш-память), магнитный диск и оптический диск.
Центральный процессор 201 объектива управляет работой каждого блока в сменном объективе 200. Кроме того, центральный процессор 201 объектива связан с центральным процессором 101 фотокамеры посредством контакта 202 объектива, когда сменный объектив 200 установлен на корпусе 100 фотокамеры.
Контакт 202 объектива включает в себя контакт передачи сигналов, на который сигналы передаются из корпуса 100 фотокамеры, и контакт электропитания, на который подается электрическая энергия из корпуса 100 фотокамеры.
Переключателем 203 операции стабилизации изображения может управлять пользователь, чтобы определять, выполняется ли операция стабилизации изображения (операция стабилизации изображения).
Блок 204 обнаружения угловой вибрации (блок обнаружения вибрации) включает в себя узел обнаружения, который включает в себя гироскоп, и узел вывода результатов вычислений.
Узел обнаружения обнаруживает угловую скорость вертикальной вибрации (направление поворота относительно горизонтальной оси) и угловую скорость горизонтальной вибрации (направление поворота относительно вертикальной оси) фотокамеры в соответствии с командой, передаваемой из центрального процессора 201 объектива.
Узел вывода результатов вычислений осуществляет электрическое интегрирование или механическое интегрирование выходного сигнала узла обнаружения с целью получения и вывода сигнала смещения на центральный процессор 201 объектива.
Как описывалось со ссылкой на фиг.2, оптический механизм 205 стабилизации изображения сконфигурирован так, что оправа 52 линзы, которая удерживает линзу 51, поддерживается во взвешенном состоянии пружиной 55 сжатия (упругим элементом), и так, что оправа 52 линзы приводится в движение приводными блоками в двух направлениях (то есть, в горизонтальном направлении и вертикальном направлении в плоскости, перпендикулярной оптической оси).
Поскольку, как описывалось выше, оправа 52 линзы поддерживается в подвешенном состоянии пружиной 55 сжатия (упругим элементом), то отсутствует зажимное устройство для фиксации оптического блока 14 стабилизации изображения в случае, когда стабилизатор изображения выключен.
Блок 206 обнаружения положения контролирует положение оптического блока 14 стабилизации изображения в плоскости, перпендикулярной к оптической оси.
Когда стабилизатор изображения включен, блок 207 корректирующего управления приводом осуществляет управление и приводит в движение блок 14 стабилизации изображения в пределах заданного диапазона коррекции в плоскости, перпендикулярной к оптической оси, на основании диапазона коррекции и положения, задаваемых блоком 209 задания диапазона коррекции и положения. Блок 209 задания диапазона коррекции и положения задает диапазон движения оптического блока 14 стабилизации изображения в плоскости, перпендикулярной к оптической оси.
Блок 207 корректирующего управления приводом определяет целевое положение смещения (целевое положение привода) оптического блока 14 стабилизации изображения, который является подвижным в направлении, перпендикулярном к оптической оси, на основании выходной информации об обнаружении вибрации с блока 204 обнаружения угловой вибрации.
Блок 207 корректирующего управления приводом приводит в движение блок 14 стабилизации изображения до целевого положения смещения путем осуществления управления с обратной связью на основании различия между положением смещения, обнаруженным блоком 206 обнаружения положения, и целевым положением смещения.
Между прочим, когда стабилизатор изображения выключен, блок 14 стабилизации изображения перемещается в плоскости, перпендикулярной к оптической оси, в положение, задаваемое блоком 209 задания диапазона коррекции и положения. После этого осуществляется управление оптическим блоком 14 стабилизации изображения для сохранения его положения.
Блок 208 определения гравитационного направления определяет гравитационное направление.
Когда стабилизатор изображения выключен, блок 208 определения гравитационного направления определяет гравитационное направление на основании информации о положении оптического блока 14 стабилизации изображения, выводимой из блока 206 обнаружения положения, в плоскости, перпендикулярной к его оптической оси, и на основании информации о положении центра оптической оси фотографической оптической системы.
Когда стабилизатор изображения включен, блок 208 определения гравитационного направления определяет гравитационное направление на основании информации о положении оптического блока 14 стабилизации изображения, выводимой из блока 206 обнаружения положения, в плоскости, перпендикулярной его оптической оси, и на основании информации о положении центра оптической оси фотографической оптической системы, которая становится доступной благодаря обнаружению напряжения возбуждения, подаваемого блоком 207 корректирующего управления приводом и соответствующего целевому положению привода.
Ниже со ссылками на фиг.5А и 5В будет подробно описан способ обнаружения гравитационного направления.
Блок 209 задания диапазона коррекции и положения задает диапазон движения оптического блока 14 стабилизации изображения в плоскости, перпендикулярной к оптической оси.
Более конкретно, блок 209 задания диапазона коррекции и положения задает диапазон коррекции, когда стабилизатор изображения включен, и положение удержания оптического блока 14 стабилизации изображения, когда стабилизатор изображения выключен, на основании информации о гравитационном направлении из блока 208 определения гравитационного направления и на основании информации о фокусном расстоянии из блока 210 обнаружения фокусного расстояния.
Блок 210 обнаружения фокусного расстояния включает в себя кодирующее устройство трансфокации и обнаруживает положение трансфокации фотографической оптической системы.
С блока 210 обнаружения фокусного расстояния информация, относящаяся к фокусному расстоянию, выводится на центральный процессор 201 объектива.
Блок 211 фокусировки включает в себя приводной узел фокусировки (соответствующий приводному электродвигателю 16 автоматической фокусировки, показанному на фиг.1), управляемый центральным процессором 201 объектива на основании информации, относящейся к количеству движения линзового блока фокусировки (соответствующего второму линзовому блоку 12, показанному на фиг.1), необходимой для фокусировки, передаваемой из центрального процессора 101 фотокамеры, и также включает в себя линзовый блок фокусировки (соответствующий второму линзовому блоку 12 на фиг.1).
Диафрагменный блок 212 (соответствующий диафрагме 15, показанной на фиг.1) включает в себя приводной узел диафрагмы, управляемый центральным процессором 201 объектива на основании команды управления диафрагмой, передаваемой из центрального процессора 101 фотокамеры, а лепестки диафрагмы приводятся в движение приводным узлом диафрагмы с целью задания площади апертуры.
На фиг.4 представлена блок-схема последовательности операций, иллюстрирующая основную работу системы фотокамеры, показанной на фиг.3.
Сначала на этапе 1001 выключатель 103 электропитания корпуса 100 фотокамеры переводят в положение «включено».
Вследствие этого в системе начинается подача электрической энергии на сменный объектив 200.
Между прочим, в тех случаях, когда устанавливают новую батарею или когда сменный объектив 200 прикрепляют к корпусу 100 фотокамеры, начинает осуществляться связь корпуса 100 фотокамеры и сменного объектива 200 друг с другом.
Затем на этапе 1002 центральный процессор 101 фотокамеры определяет, выводится ли сигнал SW1 с пускового переключателя 104.
Если сигнал SW1 выводится («Да» на этапе 1002), то на этапе 1003 центральный процессор 201 объектива определяет, находится ли переключатель 203 операции стабилизации напряжения в положении «включено» (то есть, режим стабилизации изображения (СИ-режим) включен).
Если режим стабилизации изображения включен («Да» на этапе 1003), то осуществление процесса продолжается на этапе 1004. Если режим стабилизации изображения выключен («Нет» на этапе 1003), осуществляется переход выполнения процесса к этапу 1012.
На этапе 1004 центральный процессор 201 объектива начинает обнаруживать вибрацию. На этапе 1005 центральный процессор 201 объектива вычисляет гравитационное направление на основании информации, относящейся к напряжению возбуждения, соответствующему целевому положению привода, которое подается на блок 207 корректирующего управления приводом, и на основании информации о положении оптического блока 14 стабилизации изображения.
Затем на этапе 1006 центральный процессор 201 объектива на основании информации о фокусном расстоянии вычисляет оптически допустимую величину смещения от оптической оси. На этапе 1007 центральный процессор 201 объектива определяет корректировочное положение центра и диапазон коррекции оптического блока 14 стабилизации изображения на основании информации, относящейся к гравитационному направлению и к допустимой величине смещения.
Процесс, осуществляемый на этапах с 1005 по 1007, выполняется многократно в течение заданного периода времени для обновления корректировочного центра и диапазона коррекции.
Затем на этапе 1008 центральный процессор 101 фотокамеры начинает фотометрию (измерение интенсивности света) и автоматическую фокусировку (АФ), измерение дальности, а центральный процессор 201 объектива начинает осуществлять управление автоматической фокусировкой (наводку на фокус) и стабилизацию изображения.
Центральный процессор 101 фотокамеры и центральный процессор 201 объектива повторяют цикл этапов с 1002 по 1008 и останавливаются на этапе 1009 до тех пор, пока переключатель SW2 не будет переведен в положение «включено» путем полного нажатия на пусковую кнопку.
Если переключатель SW2 находится в положении «включено» («Да» на этапе 1009), осуществление процесса продолжается на этапе 1010.
На этапе 1010 центральный процессор 101 фотокамеры начинает операцию экспонирования. Во время операции экспонирования центральный процессор 201 объектива продолжает осуществлять стабилизацию изображения.
На этапе 1011 центральный процессор 101 фотокамеры сохраняет экспонированное изображение. Затем осуществление процесса возвращается к этапу 1002.
На этапе 1012 центральный процессор 201 объектива вычисляет гравитационное направление на основании информации, относящейся к положению оптического блока 14 стабилизации изображения.
После этого на этапе 1013 центральный процессор 201 объектива вычисляет оптически допустимую величину смещения от оптической оси на основании информации о фокусном расстоянии. На этапе 1014 центральный процессор 201 объектива определяет положение удержания оптического блока 14 стабилизации изображения на основании информации о гравитационном направлении и информации, относящейся к оптически допустимой величине смещения.
Затем на этапе 1015 центральный процессор 201 объектива приводит в движение оптический блок 14 стабилизации изображения до положения удержания, определенного на этапе 1014. После этого центральный процессор 201 объектива электрически удерживает оптический блок 14 стабилизации изображения в этом определенном положении удержания.
Процесс, осуществляемый на этапах с 1012 по 1015, повторяется многократно в течение заданного периода времени для обновления положения удержания.
Затем на этапе 1016 центральный процессор 101 фотокамеры выполняет автоматическую фокусировку (АФ), операцию измерения расстояния, и фотометрию (измерение интенсивности света). После этого осуществление процесса продолжается на этапе 1017. На этапе 1017 центральный процессор 101 фотокамеры и центральный процессор 201 объектива повторяют цикл этапов с 1002 по 1017 и останавливаются на этапе 1017 до тех пор, пока переключатель SW2 не будет переведен в положение «включено» путем осуществления полного нажатия на пусковую кнопку.
Если переключатель SW2 находится в положении «включено» («Да» на этапе 1017), осуществление процесса продолжается на этапе 1018, на котором центральный процессор 101 фотокамеры выполняет операцию экспонирования без осуществления стабилизации изображения.
В системе однообъективной зеркальной цифровой фотокамеры со сменным объективом согласно примеру осуществления настоящего изобретения описанная выше последовательность операций выполняется до тех пор, пока выключатель 103 электропитания не будет переведен в положение «выключено». Если выключатель 103 электропитания переводится в положение «выключено», связь между центральным процессором 101 фотокамеры и центральным процессором 201 объектива прекращается. Кроме того, приостанавливается подача электрической энергии на сменный объектив 200.
Далее со ссылками на фиг.5А и 5В описывается способ вычисления гравитационного направления.
Оптический блок 14 стабилизации изображения удерживается упругими элементами. Поэтому, если характеристики пружинистости упругих элементов являются линейными, движущая сила со стороны блока 207 корректирующего управления приводом является по существу пропорциональной величине смещения от уравновешенного положения оптического блока 14 стабилизации изображения.
Для вынуждающих воздействий на приводную силу необходимо ускорение. Однако предполагается, что ускорение, необходимое для стабилизации изображения, является столь малым, что им можно пренебречь.
Если каждый приводной блок состоит из катушки линейного электропривода и постоянного магнита, то напряжение возбуждения, подаваемое на каждый приводной блок (катушку линейного электропривода в случае настоящего осуществления), является по существу пропорциональным движущей силе.
Поэтому обнаруживаемое напряжение возбуждения может быть преобразовано в величину смещения.
Например, центр положения, обнаруженный блоком 206 обнаружения положения, предполагается совмещенным с оптической осью блока 14 стабилизации изображения в состоянии, в котором отсутствует отклонение упругих элементов (то есть, в положении, из которого блок 14 стабилизации изображения не опускается под действием собственной массы).
В этом случае разность между смещением, обнаруженным блоком 206 обнаружения положения, и величиной смещения, преобразованной из напряжения возбуждения оптического блока 14 стабилизации изображения, равна величине смещения вследствие опускания под действием собственной массы оптического блока 14 стабилизации изображения. В соответствии с этим может быть вычислено гравитационное направление.
На фиг.5А показан случай, когда фотокамера удерживается в горизонтальном положении. В этом состоянии предполагается, что, если оптическая ось оптического блока 14 стабилизации изображения расположена в точке А, то положение точки А должно определяться двумя элементами движения, например, смещением, вычисленным с осуществлением преобразования напряжения возбуждения оптического блока 14 стабилизации изображения, и смещением, обнаруженным блоком 206 обнаружения положения, которые рассмотрены ниже.
Смещение (X, Y), вычисленное при преобразовании подаваемого напряжения возбуждения: (X, Y)=(0,5 мм, 0,2 мм).
Смещение (X, Y), обнаруженное блоком 206 обнаружения положения: (X, Y)=(0,5 мм, 0 мм).
Смещение, полученное вычислением, показанное ниже, отражает точку равновесия между собственной массой оптического блока 14 стабилизации изображения и упругой силой упругого элемента.
{(Смещение, обнаруженное блоком 206 обнаружения положения) - (смещение, вычисленное при преобразовании подаваемого напряжения возбуждения)} = (-0,2 мм, 0 мм).
На фиг.5В показан случай, когда фотокамера удерживается в вертикальном положении. В этом состоянии, если оптическая ось оптического блока 14 стабилизации изображения находится в точке В, то положение точки В должно определяться двумя элементами движения, например, смещением, вычисленным при преобразовании напряжения возбуждения оптического блока 14 стабилизации изображения, и смещением, обнаруженным блоком 206 определения положения, которые рассмотрены ниже.
Смещение (X, Y), вычисленное при преобразовании подаваемого напряжения возбуждения: (X, Y)=(0,7 мм, 0 мм).
Смещение (X, Y), обнаруженное блоком 206 обнаружения положения: (X, Y)=(0,5 мм, 0 мм).
Смещение, полученное вычислением, отражает точку равновесия между собственной массой оптического блока 14 стабилизации изображения и упругой силой упругого элемента.
{(Смещение, обнаруженное блоком 206 обнаружения положения) - (смещение, вычисленное при преобразовании подводимого напряжения возбуждения)} = (-0,2 мм, 0 мм).
Следовательно, гравитационное направление может быть определено на основании составляющих X и Y каждого из уравновешенных положений.
Далее со ссылкой на фиг.6 ниже описывается изменение каждого из положения удержания и диапазона движения, которые соответствуют каждому фокусному расстоянию.
Ниже описываются диапазоны коррекции с учетом нижеследующих условий, основанных на примерах чувствительности к сдвигу, соответствующей каждому фокусному расстоянию, оптически допустимого максимального угла отклонения относительно главной оптической оси и корректировочного угла отклонения во время стабилизации изображения.
Чувствительность к сдвигу на телефотографическом конце составляет 1°/мм (угол отклонения составляет 1°, когда оптический блок 14 стабилизации изображения смещается на 1 мм).
Чувствительность к сдвигу на широкоугольном конце составляет 2°/мм (угол отклонения составляет 2°, когда оптический блок 14 стабилизации изображения смещается на 1 мм).
Допустимый угол отклонения на телефотографическом конце составляет 0,5° (угол отклонения и величина смещения, обусловленные сдвигом оптической оси оптического блока 14 стабилизации изображения относительно главной оптической оси, составляют 0,5° и 0,5 мм, соответственно).
Допустимый угол отклонения на широкоугольном конце составляет 0,5° (угол отклонения и величина смещения, обусловленные сдвигом оптической оси оптического блока 14 стабилизации изображения относительно главной оптической оси, составляют 0,5° и 0,25 мм, соответственно).
Корректировочный угол на телефотографическом конце составляет ± 0,3° (соответствует случаю, когда смещение оптического блока 14 стабилизации изображения составляет ± 0,3 мм).
Корректировочный угол на широкоугольном конце составляет ± 0,3° (соответствует случаю, когда смещение оптического блока 14 стабилизации изображения составляет ± 0,15 мм).
Как показано на фиг.6, оптическая ось оптического блока 14 стабилизации изображения смещена в точку Р1 от главной оптической оси Р0 вследствие равновесия между упругой силой упругого элемента и собственной массой оптического блока 14 стабилизации изображения до того, как переключатель SW1 переведен в положение «включено». В соответствии с настоящим изобретением предполагается, что оптическая ось оптического блока 14 стабилизации изображения смещается вследствие собственной массы на 0,2 мм относительно главной оптической оси Р0.
Угол отклонения, соответствующий смещению оптической оси оптического блока 14 стабилизации изображения, изменяется в зависимости от фокусного расстояния фотографической оптической системы. Когда фокусное расстояние фотографической оптической системы представляет собой фокусное расстояние на телефотографическом конце, угол отклонения составляет 0,2°. С другой стороны, когда фокусное расстояние фотографической оптической системы представляет собой фокусное расстояние на широкоугольном конце, угол отклонения составляет 0,4°.
Следующим шагом ниже рассматривается диапазон коррекции оптического блока 14 стабилизации изображения на телефотографическом конце в случае, когда режим стабилизации изображения включен.
Когда блоком 210 обнаружения фокусного расстояния обнаруживается, что фокусное расстояние должно соответствовать телефотографическому концу, то определяется оптически допустимый диапазон Rt0 угла отклонения (максимальный угол отклонения составляет 0,5°, а величина смещения составляет 0,5 мм).
Затем на основании информации о гравитационном направлении из блока 208 определения гравитационного направления центр Pt диапазона коррекции и диапазон Rt коррекции, опустившиеся в гравитационном направлении, определяются в пределах допустимого диапазона Rt0 угла отклонения.
В этом случае положение со снижением на 0,2° под действием собственной массы (величина смещения составляет 0,2 мм) должно быть задано для центра диапазона коррекции блока 14 стабилизации изображения. Кроме того, стабилизация изображения выполняется при условии, что корректировочный угол отклонения составляет ± 0,3° (величина смещения составляет ± 0,3 мм).
Когда фокусное расстояние фотографической оптической системы представляет собой фокусное расстояние на телефотографическом конце, центр Pt диапазона коррекции является тем же самым, что и положение Р1 в случае снижения под действием собственной массы. Поэтому после перевода переключателя SW1 в положение «включено», стабилизация изображения осуществляется с использованием этой точки Pt в качестве начальной точки.
Следующим шагом ниже рассматривается диапазон коррекции оптического блока 14 стабилизации изображения на широкоугольном конце в случае, когда режим стабилизации изображения включен.
Когда блоком 210 обнаружения фокусного расстояния обнаруживается, что фокусное расстояние должно соответствовать широкоугольному концу, то определяется оптически допустимый диапазон Rw0 угла отклонения (максимальный угол отклонения составляет 0,5°, а величина смещения составляет 0,25 мм).
Затем на основании выходной информации о гравитационном направлении с блока 208 определения гравитационного направления центр Pw диапазона коррекции и диапазон Rw коррекции, опустившиеся в гравитационном направлении, определяются в пределах допустимого диапазона Rt0 угла отклонения.
В этом случае положение (угол отклонения составляет 0,2°, что соответствует величине смещения 0,1 мм), отличающееся от положения опускания блока 14 стабилизации изображения под действием собственной массы, задается для центра диапазона коррекции. Кроме того, стабилизация изображения осуществляется при условии, что корректировочный угол отклонения составляет ± 0,3°, что соответствует величине смещения ± 0,15 мм.
На широкоугольном конце центр Pw диапазона коррекции отличается от положения Р1 опускания под действием собственной массы. Поэтому после перевода переключателя SW1 в положение «включено» оптическая ось блока 14 стабилизации изображения перемещается в точку Pw с такой скоростью, что фотограф не испытывает неудобства при наблюдении изображения через видоискатель. Затем стабилизация изображения осуществляется с использованием этой точки Pt в качестве начальной точки.
В дальнейшем со ссылкой на фиг.7 рассматривается движущая осевая сила, необходимая для управления стабилизацией изображения в случае, когда управление стабилизацией изображения осуществляется в пределах определенного диапазона коррекции стабилизации изображения.
Величина движущей осевой силы для приведения в движение блока 14 стабилизации изображения равна 0 в положении Р1, в котором собственная масса оптического блока 14 стабилизации изображения уравновешена упругой силой упругого элемента.
Если характеристика пружинистости упругого элемента, предназначенного для поджатия блока 14 стабилизации изображения, является линейной, то необходимо, чтобы величина движущей осевой силы была пропорциональна расстоянию от положения Р1 опускания под действием собственной массы.
Обратимся к фиг.7, где осевые силы, необходимые для приведения в движение блока 14 стабилизации изображения на телефотографическом конце и широкоугольном конце, являются сравнимыми друг с другом, когда диапазоны коррекции (диапазоны Rt и Rw коррекции) заданы на основании соответствующих фокусных расстояний (фокусного расстояния на телефотографическом конце и фокусного расстояния на широкоугольном конце).
На фиг.7 осевая сила представлена в виде расстояния от точки Р1, поскольку величина движущей осевой силы пропорциональна смещению из точки Р1.
На фиг.7 движущая осевая сила Ft представляет собой максимальную силу в диапазоне Rt коррекции, соответствующем фокусному расстоянию на телефотографическом конце. Движущая осевая сила Fw представляет собой максимальную силу в диапазоне Rw коррекции, соответствующем фокусному расстоянию на широкоугольном конце.
Кроме того, аналогичные корректировочные величины (на телефотографическом конце корректировочный угол отклонения составляет ± 0,3°, что соответствует смещению ± 0,3 мм, и на широкоугольном конце корректировочный угол отклонения составляет ± 0,3°, что соответствует смещению ± 0,15 мм) определяются относительно главной оптической оси Р0 как центра диапазона коррекции. Для справки, на фиг.7 также показаны движущие силы Ft' и Fw'. Движущая осевая сила Ft' является максимальной силой в диапазоне Rt' коррекции, соответствующем телефотографическому концу. Движущая осевая сила Fw' является максимальной силой в диапазоне Rw' коррекции, соответствующем широкоугольному концу.
Из этого сравнения понятно, что движущая осевая сила уменьшается по сравнению со случаем, когда стабилизация изображения осуществляется вокруг центра главной оптической оси как центра диапазона коррекции.
Это происходит потому, что осевая сила для подъема собственной массы блока 14 стабилизации изображения является необходимой в дополнение к движущей осевой силе для того, чтобы задать главную оптическую ось в качестве центра диапазона коррекции.
Кроме того, напряжение возбуждения, необходимое для приведения в движение блока 14 стабилизации изображения, пропорционально движущей осевой силе. Поэтому из описанного выше результата стабилизации изображения понятно, что электрическая энергия может быть сэкономлена пропорционально степени уменьшения движущей осевой силы.
В приведенном выше описании рассматривалось, что блок 14 стабилизации изображения приводится в движение и удерживается в соответствии с допустимым углом отклонения, определенным в соответствии с фокусным расстоянием, даже в том случае, когда режим операции стабилизации изображения выключен. Однако, если коэффициент пружины упругого элемента является настолько большим, что угол отклонения, соответствующий положению опускания под действием собственной массы, достаточно мал по сравнению с допустимым углом отклонения, то нет необходимости приводить в движение блок 14 стабилизации изображения.
В соответствии с описанным выше примером осуществления в случае, когда выбран режим стабилизации изображения, диапазон движения блока 14 стабилизации изображения определяется на основании гравитационной выходной информации с блока 208 определения гравитационного направления, и выходной информации о фокусном расстоянии с блока 210 обнаружения фокусного расстояния.
Затем осуществляется корректировочное движение вокруг находящейся внизу точки, обусловленной массой самого блока 14 стабилизации изображения, в пределах оптически допустимого угла отклонения, определенного в соответствии с каждым фокусным расстоянием. Таким образом, напряжение, подаваемое на приводные блоки, может быть снижено в то время, как оптические характеристики будут соответствовать предъявляемым требованиям.
Кроме того, блок 208 определения гравитационного направления обнаруживает гравитационное направление на основании обнаруженного положения оптического блока 14 стабилизации изображения и на основании напряжения возбуждения, соответствующего целевому положению привода, которое является входным сигналом для блока 207 корректирующего управления приводом. Поэтому диапазон коррекции может быть обновлен даже в середине процесса стабилизации изображения. Следовательно, даже в случае, когда положение фотографирующего изменяется во время стабилизации изображения, электрическая энергия всегда может быть сэкономлена при сохранении оптически допустимого диапазона.
Когда режим стабилизации изображения не выбран, положение блока 14 стабилизации изображения определяется на основании выходной информации о гравитационном направлении с блока 208 определения гравитационного направления и на основании выходной информации о фокусном расстоянии с блока 210 обнаружения фокусного расстояния.
В соответствии с этим блок 14 стабилизации изображения удерживается в точке опускания под действием собственной массы, находясь в оптически допустимом диапазоне угла отклонения, соответствующем каждому фокусному расстоянию, и поэтому в совокупности могут быть получены хорошие оптические характеристики и экономия электрической энергии.
Хотя настоящее изобретение было описано с обращением к примерам осуществлений, должно быть понятно, что изобретение не ограничено раскрытыми примерами осуществлений. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации с тем, чтобы охватывались все модификации, эквивалентные конструкции и функции.
По этой заявке испрашивается приоритет заявки №2007-245543 на патент Японии, поданной 21 сентября 2007 г., которая полностью включена в настоящую заявку посредством ссылки.
Реферат
Изобретение относится к линзовому устройству, которое обеспечивает стабилизацию изображения, и фотокамере, в состав которой входит указанное линзовое устройство. Стабилизация изображения заявленным линзовым устройством обеспечивается за счет использования информации о вибрации линзового устройства и информации, относящейся к диапазону управления, для перемещения блока стабилизации изображения. При этом информация, которая относится к диапазону управления для перемещения блока стабилизации изображения, определяется за счет информации, относящейся к гравитационному направлению, выводимой с блока определения гравитационного направления, и информации, относящейся к фокусному расстоянию, выводимой с блока обнаружения фокусного расстояния. Заявленное изобретение обеспечивает улучшение стабилизации изображения. 2 н.п. ф-лы, 8 ил.
Формула
фотографическую оптическую систему, включающую в себя блок стабилизации изображения, поддерживаемый опорным элементом посредством множества упругих элементов;
привод, сконфигурированный для приведения в движение блока стабилизации изображения в направлении, перпендикулярном его оптической оси;
блок обнаружения вибрации, сконфигурированный для обнаружения вибрации линзового устройства;
блок обнаружения положения, сконфигурированный для обнаружения положения блока стабилизации изображения в направлении, перпендикулярном оптической оси;
блок определения гравитационного направления, сконфигурированный для определения гравитационного направления на основании информации, относящейся к целевому положению управления блока стабилизации изображения, определенной в соответствии с выходным сигналом с блока обнаружения вибрации, и на основании выходного сигнала с блока обнаружения положения;
блок обнаружения фокусного расстояния, сконфигурированный для обнаружения фокусного расстояния фотографической оптической системы,
задающий блок, сконфигурированный для задания диапазона управления в направлении, перпендикулярном оптической оси блока стабилизации изображения, на основании информации, относящейся к гравитационному направлению, выводимой с блока определения гравитационного направления; и информации, относящейся к фокусному расстоянию, выводимой с блока обнаружения фокусного расстояния, и
блок управления, сконфигурированный для управления приводом на основании выходного сигнала с блока обнаружения вибрации и информации, относящейся к диапазону управления, для перемещения блока стабилизации изображения.
Комментарии