Устройство захвата изображений и способ управления устройством захвата изображений - RU2453067C1
Код документа: RU2453067C1
Чертежи




Описание
Уровень техники, к которой относится изобретение
Область техники, к которой относится изобретение
Настоящее изобретение имеет отношение к устройству захвата изображений и способу управления устройством захвата изображений и, более конкретно, к техническим приемам коррекции вибраций устройства захвата изображений с использованием как оптических, так и электронных систем коррекции вибраций в устройстве захвата изображений.
Описание предшествующего уровня техники
С недавнего времени, по мере того как устройства захвата изображений становятся более компактными, а увеличение, производимое оптическими системами, становится более высоким, вибрация устройства захвата изображений может в значительной степени ухудшить качество захваченного изображения. Были предложены различные функции коррекции вибраций, корректирующие размывание захваченного изображения, являющееся результатом вибрации устройства получения изображений. Известна общепринятая функция коррекции вибраций, установленная в устройстве захвата изображений, в которой в способе коррекции используются как оптические, так и электронные системы коррекции вибраций (например, см. японский патент номер 2803072).
Во-первых, оптическая система коррекции вибраций обнаруживает вибрации устройства захвата изображений и приводит в действие систему оптической коррекции вибрации для сведения на нет обнаруженных вибраций, и, вследствие этого, корректируя вибрации таким образом, чтобы световой пучок от объекта, падающий на датчик изображения, всегда поступал в одну и ту же позицию поверхности восприятия изображения. Затем, электронная система коррекции вибраций устанавливает смещение между изображениями для обнаружения оставшихся вибраций, которые не могут быть скорректированы посредством оптической системы коррекции вибраций. Электронная система коррекции вибраций перемещает область считывания изображений для сведения на нет установленного смещения между изображениями, корректируя оставшиеся, низкочастотные, вибрации. Таким образом, устройство захвата изображений может улучшить способность коррекции с использованием как оптических, так и электронных систем коррекции вибраций.
Однако известный способ коррекции с использованием как оптических, так и электронных систем коррекции вибраций страдает от следующих проблем. Датчик угловой скорости, используемый для обнаружения величины вибрации устройства захвата изображений, может обнаруживать высокочастотные вибрации с высокой точностью. Однако параметр обнаружения угловой скорости, в целом, при низких частотах, 1 Гц или менее, становится недостаточным. Кроме того, электронная система коррекции вибраций не может скорректировать вибрации в течение промежутка времени сбора данных. Когда все оставшиеся вибрации, которые не могут быть скорректированы посредством оптической системы коррекции вибраций, подвергаются коррекции посредством электронной системы коррекции вибраций, основанной на обнаружении размывания между изображениями, качество изображения ухудшается вследствие вибраций в течение промежутка времени сбора данных, вследствие генерирования низкочастотных вибраций большой амплитуды.
Сущность изобретения
Настоящее изобретение было выполнено с учетом вышеупомянутой ситуации и улучшает способность коррекции вибраций при повышении качества вибраций в течение промежутка времени сбора данных в способе коррекции вибраций с использованием как оптической, так и электронной систем коррекции вибраций.
В соответствии с первым аспектом настоящего изобретения в настоящем документе предоставляется устройство захвата изображения, содержащее средство восприятия изображения, выполненное с возможностью восприятия изображения объекта, сформированного посредством оптической системы; средство обнаружения вибрации, выполненное с возможностью обнаружения вибрации, распространяющейся на устройство захвата изображения; средство обнаружения вектора, выполненное с возможностью обнаружения вектора движения из изображения, воспринимаемого посредством средства восприятия изображения; первое средство вычисления, выполненное с возможностью вычисления первой величины коррекции из сигнала, полученного на основе выхода из средства обнаружения вибрации, и сигнала на основе вектора движения; второе средство вычисления, выполненное с возможностью вычисления второй величины коррекции на основе вектора движения; первое средство коррекции, выполненное с возможностью оптической коррекции вибрации на основе первой величины коррекции; и второе средство коррекции, выполненное с возможностью электронной коррекции вибрации посредством изменения области считывания изображения на основе второй величины коррекции, в которой устройство захвата изображения расположено таким образом, что коррекция вибрации выполняется с использованием как первого средства коррекции, так и второго средства коррекции.
В соответствии со вторым аспектом настоящего изобретения предоставляется способ управления устройством захвата изображения, включающего в себя средство восприятия изображения для восприятия изображения объекта, сформированного посредством оптической системы, способ, содержащий обнаружение вибрации, распространяющейся на устройство захвата изображения; обнаружение вектора движения из изображения, воспринимаемого посредством средства восприятия изображения; вычисление первой величины коррекции из сигнала, полученного на основе выхода при обнаружении вибрации, и сигнала на основе вектора движения; вычисление второй величины коррекции на основе вектора движения; оптическую коррекцию вибрации на основе первой величины коррекции; и коррекцию вибрации посредством коррекции области считывания изображения на основе второй величины коррекции, в которой коррекция вибрации выполняется с использованием как оптической коррекции вибрации, так и электронной коррекции вибрации.
Дополнительно, технические приемы настоящего изобретения станут очевидными из нижеследующего описания иллюстративных вариантов осуществления (со ссылкой на сопутствующие чертежи).
Краткое описание чертежей
Сопроводительные чертежи изображают варианты осуществления изобретения и вместе с описанием служат для разъяснения принципов изобретения.
Фиг.1 является блок-схемой, изображающей структуру устройства захвата изображений, в соответствии с вариантом осуществления настоящего изобретения;
Фиг.2A является блок-схемой последовательности операций способа для разъяснения обработки посредством контроллера 130 векторного коэффициента в первом варианте осуществления;
Фиг.2B является графиком, изображающим изменение значения коэффициента K в первом варианте осуществления;
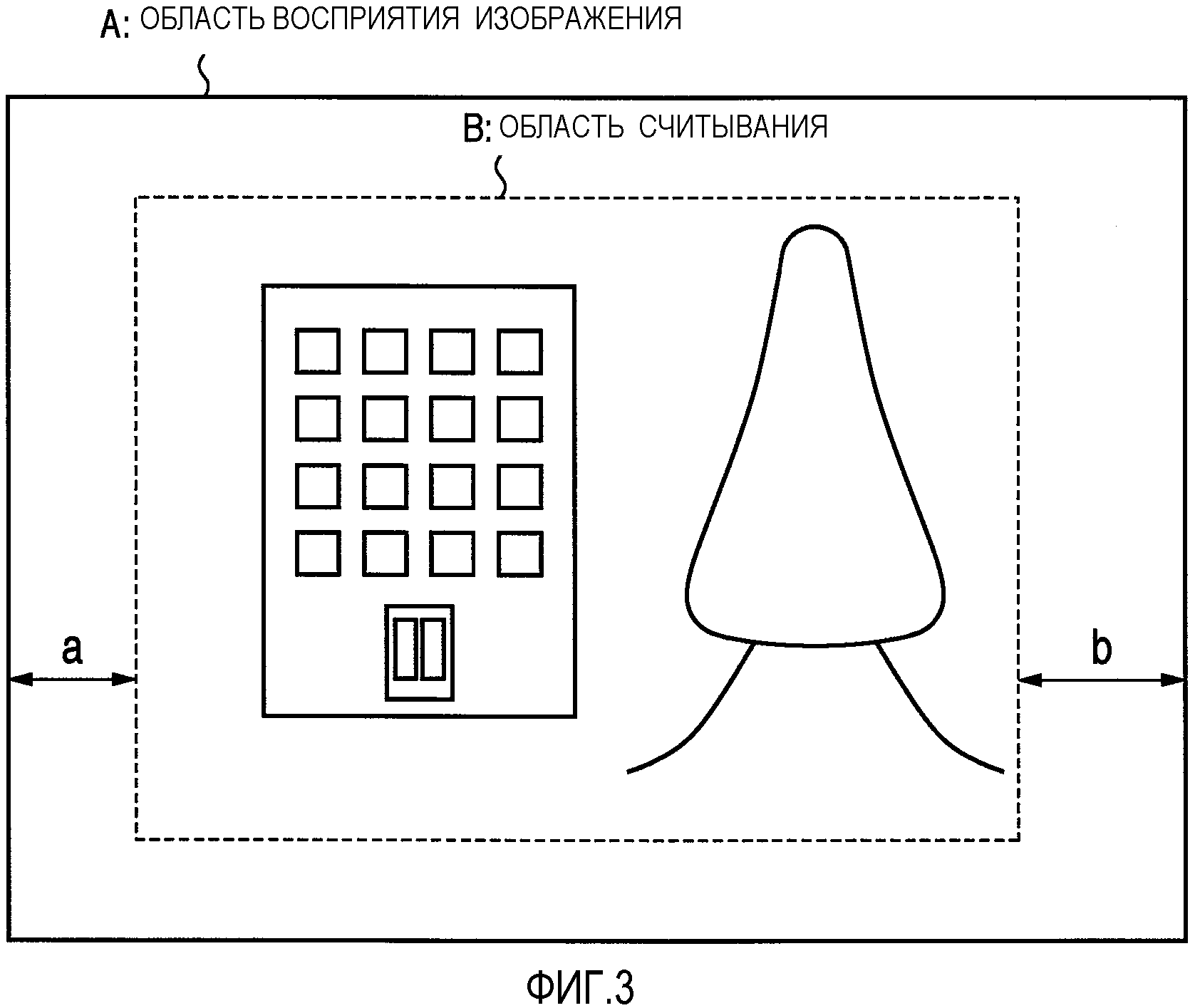
Фиг.3 является представлением для разъяснения переменного количества пикселей для электронной коррекции вибрации в первом варианте осуществления;
Фиг.4A является блок-схемой последовательности операций способа для разъяснения обработки посредством контроллера 130 векторного коэффициента во втором варианте осуществления;
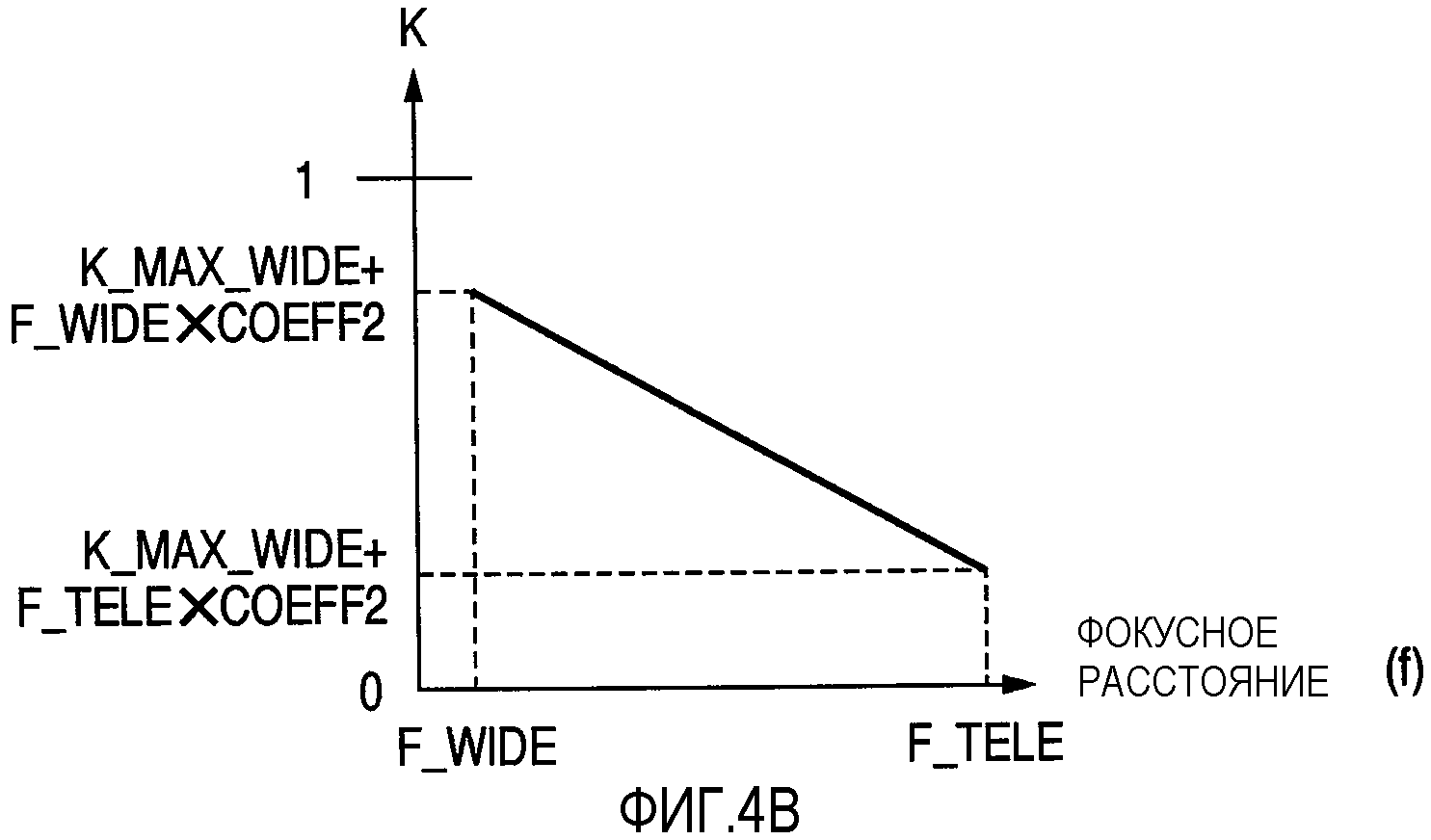
Фиг.4B является графиком, изображающим изменение значения коэффициента K во втором варианте осуществления;
Фиг.5A является блок-схемой последовательности операций способа для разъяснения обработки посредством контроллера 130 векторного коэффициента в третьем варианте осуществления; и
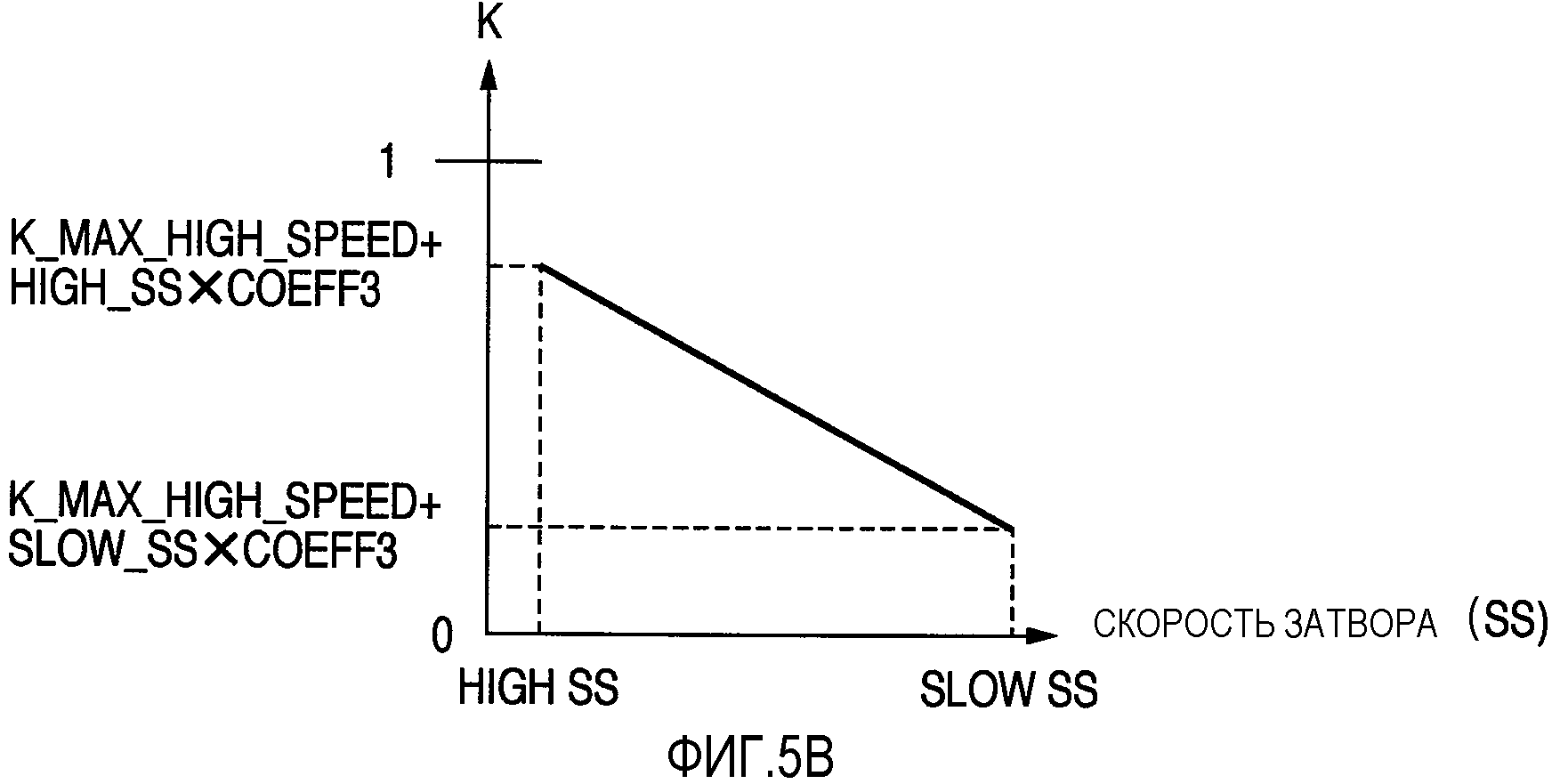
Фиг.5B является графиком, изображающим изменение значения коэффициента K в третьем варианте осуществления.
Описание вариантов осуществления
Варианты осуществления настоящего изобретения будут описываться более подробно в соответствии с сопроводительными чертежами. Отметим, что будет разъясняться управление коррекцией вибрации как в поперечном, так и в продольном направлении изображения. Управление коррекцией вибрации в другом направлении является таким же, так что исходя из этого описание не будет повторяться.
Фиг.1 является блок-схемой, изображающей структуру устройства захвата изображений, в соответствии с вариантом осуществления настоящего изобретения. Датчик 102 обнаружения вибрации является, например, датчиком угловой скорости типа гироскопа. Датчик 102 обнаружения вибрации обнаруживает, в качестве сигнала вибрации, вибрации, распространяющиеся на устройство по причине тряски камеры или колебания корпуса, и предоставляет сигнал вибрации на фильтр 103 с ограничением DC (постоянного тока). Фильтр 103 с ограничением DC отсекает компоненту постоянного тока (DC), содержащуюся в сигнале вибрации, предоставляемом из датчика 102 обнаружения вибрации, и предоставляет исключительно компоненту переменного тока (AC), то есть компоненту вибрации сигнала вибрации на усилитель 104. Отметим, что фильтр 103 с ограничением DC является, например, фильтром верхних частот (HPF), который отсекает входной сигнал в предварительно определенной полосе частот. Усилитель 104 усиливает до оптимальной чувствительности сигнал вибрации (компонент вибрации), предоставленный из фильтра 103 с ограничением DC, и предоставляет усиленный сигнал вибрации на аналого-цифровой (A/D) преобразователь 105. Преобразователь 105 A/D преобразует сигнал вибрации, предоставленный из усилителя 104, в цифровой сигнал вибрации и предоставляет его в качестве данных угловой скорости на фильтр 106 высоких частот (HPF) в микрокомпьютере 101 (μCOM).
Фильтр 106 HPF отсекает низкочастотный компонент, содержащийся в цифровом сигнале вибрации (данных угловой скорости), выведенном от преобразователя 105 A/D, и выводит результирующие данные угловой скорости. Блок 107 интегрирования интегрирует данные угловой скорости, выведенные из фильтра 106 HPF, и выводит результат интеграции в качестве данных углового смещения. Блок 108 коррекции фокусного расстояния получает текущую информацию о позиции масштабирования из кодировщика 119 масштабирования, который обнаруживает позицию масштабирования оптической системы 118 для выполнения операций по изменению масштаба и фокусировки. Из этой информации, блок 108 коррекции фокусного расстояния вычисляет фокусное расстояние. Блок 108 коррекции фокусного расстояния вычисляет величину привода коррекции (упоминающуюся как "данные оптической коррекции угловой скорости") системы 117 оптической коррекции на основе информации о фокусном расстоянии и вышеупомянутых данных углового смещения.
Датчик 120 изображения преобразует изображение объекта, сформированное через систему 117 оптической коррекции и систему 118 оптического отображения, в сигнал изображения с предварительно определенной частотой кадров и выводит сигнал изображения. Процессор 121 обработки сигналов генерирует видеосигнал из сигнала изображения, полученного из датчика 120 изображения, и предоставляет видеосигнал в средство 122 обнаружения вектора движения и в память 123 для хранения изображений. Средство 122 обнаружения вектора движения обнаруживает вектор движения изображения на основе сигнала яркости, содержащегося в текущем видеосигнале, сгенерированного посредством процессора 121 обработки сигналов и сигнала яркости, содержащегося в видеосигнале непосредственно предшествующего поля кадра, сохраненного в памяти для хранения изображений.
Данные вектора движения, обнаруженные посредством средства 122 обнаружения вектора движения, предоставляются на блок 131 вычисления величины коррекции вибраций, включенный в состав микрокомпьютера 101 μCOM. Блок 131 вычисления величины коррекции вибраций составлен из блоков первого блока 126 умножения, первого процессора 127 вектора движения, второго блока 128 умножения, второго процессора 129 вектора движения и контроллера 130 векторного коэффициента.
Первый блок 126 умножения умножает вектор движения, обнаруженный посредством средства 122 обнаружения вектора движения на коэффициент 1-K (0≤K≤1) и предоставляет результирующие данные на первый процессор 127 вектора движения. При использовании фильтра низких частот (LPF) или подобного устройства первый процессор 127 вектора движения объединяет данные, которые были полученные посредством умножения вектора движения на коэффициент 1-K и выходные данные первого блока 126 умножения. Первый процессор 127 вектора движения устанавливает результат интеграции в качестве данных смещения вектора движения. Результирующие выходные данные из первого процессора 127 вектора движения служат в качестве величины привода коррекции (данных оптической коррекции вектора) системы 117 оптической коррекции.
Блок 109 сложения складывает данные оптической коррекции угловой скорости из блока 108 коррекции фокусного расстояния с данными оптической коррекции вектора из первого процессора 127 вектора движения, вычисляя заключительную величину привода коррекции (первая величина коррекции) системы 117 оптической коррекции. Блок 110 вычитания вычисляет разницу между заключительной величиной привода коррекции из блока 109 сложения и цифровым значением (данными об обнаружении позиции), полученным посредством преобразования A/D посредством A/D преобразователя 116, выходных данных из датчика 115 обнаружения позиции, который обнаруживает позицию системы 117 оптической коррекции. Блок 110 вычитания выводит результат K на управляющий фильтр 111. Модулятор 112 ширины импульса преобразует выходные данные из управляющего фильтра 111 в сигнал PWM (широтно-импульсной модуляции) и выводит сигнал модуляции PWM. На основе выходных данных сигнала модуляции PWM из модулятора 112 ширины импульса, блок 113 приведения в действие двигателя приводит в действие двигатель 114 для перемещения системы 117 оптической коррекции, таким образом изменяя оптический путь света, падающего на поверхность восприятия изображения датчика 120 изображения, и оптически корректируя размывание, сгенерированное в воспринятом изображении.
Второй блок 128 умножения блока 131 вычисления величины коррекции вибраций умножает вектор движения, обнаруженный посредством средства 122 обнаружения вектора движения на коэффициент K (0≤К≤1) и предоставляет результирующие данные на второй процессор 129 вектора движения. В соответствии с данными, полученными посредством умножения вектора движения на коэффициент K, второй процессор 129 вектора движения вычисляет управляющую величину (вторую величину коррекции) для управления позицией считывания изображения в памяти 123 для хранения изображений для сведения на нет смещения между изображениями. Блок 124 управления считыванием памяти определяет позицию считывания изображения в памяти 123 для хранения изображений в соответствии с управляющей величиной, вычисляемой посредством второго процессора 129 вектора движения. В результате, видеосигнал, полученный посредством электронного корректирования вибраций, выводится из памяти 123 для хранения изображений и предоставляется на устройство записи или устройство отображения через клемму 125 вывода видеоданных.
Контроллер 130 векторного коэффициента определяет коэффициент K. Отметим, что способ определения коэффициента K будет более подробно описан с первого по третий варианты осуществления.
Первый вариант осуществления
Будет разъясняться обработка определения коэффициента K посредством контроллера 130 векторного коэффициента в устройстве 100 захвата изображения, имеющем вышеупомянутую структуру, в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг.2A является блок-схемой последовательности операций способа, являющейся примером обработки посредством контроллера 130 векторного коэффициента. Данная обработка неоднократно выполняется в каждом предварительно определенном периоде, таком как 1/60 секунды.
На этапе S10, контроллер 130 векторного коэффициента определяет, меньше ли переменное количество пикселей (CORRECT_PIXEL) для электронной коррекции вибрации, чем предварительно определенное значение CORRECT_LIMIT. При электронной коррекции вибраций частичная область (например, область B на Фиг.3) выделяется из всей области восприятия изображения (например, области A на Фиг.3), считываемой с датчика 120 изображения, и позиция считанной области изменяется в пределах области восприятия изображения, с тем чтобы свести на нет вибрации. Например, на Фиг.3 переменное количество пикселей для электронной коррекции вибраций (в поперечном направлении на Фиг.3) соответствует частям a и b; то есть
CORRECT_PIXEL=a+b.
Изменение степени электронного масштабирования устройства 100 захвата изображений означает изменение области В на Фиг.3, а переменное количество пикселей (CORRECT_PIXEL) изменяется в зависимости от степени электронного масштабирования.
Если контроллер 130 векторного коэффициента на этапе S10 определяет, что CORRECT_PIXEL меньше, чем CORRECT_LIMIT, то он переключается к процессу на этапе S12. На этапе S12, контроллер 130 векторного коэффициента определяет в качестве коэффициента K значение, получаемое посредством умножения CORRECT_PIXEL на предварительно определенный коэффициент COEFF1 (0 коэффициент K = переменное количество CORRECT_PIXEL пикселей для электронной коррекции вибраций×предварительно определенный коэффициент COEFF1. Таким образом, контроллер 130 векторного коэффициента определяет, в качестве коэффициента K значение, получаемое посредством умножения переменного количества пикселей для электронной коррекции вибраций посредством предварительно определенного коэффициента COEFF1. На этапе S13, контроллер 130 векторного коэффициента устанавливает коэффициент K, определенный на этапе S12 в блоке 126 умножения и втором блоке 128 умножения. Если контроллер 130 векторного коэффициента на этапе S10 определяет, что CORRECT_PIXEL больше или равен CORRECT_LIMIT, то он переключается к процессу на этапе S11. На этапе S11, контроллер 130 векторного коэффициента определяет в качестве коэффициента K (значение, используемое в первом блоке 126 умножения и втором блоке 128 умножения) значение, получаемое посредством умножения CORRECT_LIMIT на предварительно определенный коэффициент COEFF1. Таким образом, контроллер 130 векторного коэффициента определяет в качестве коэффициента K значение, получаемое посредством умножения предварительно определенного переменного количества пикселей для электронной коррекции вибраций посредством предварительно определенного коэффициента COEFF1. На этапе S13, контроллер 130 векторного коэффициента устанавливает коэффициент K, определенный на этапе S11 в первом блоке 126 умножения и втором блоке 128 умножения. Фиг.2B является графиком, являющимся примером изменения значения коэффициента K, соответствующего значению CORRECT_PIXEL на этапах S11 и S12. Значение коэффициента K увеличивается по мере того, как увеличивается значение CORRECT_PIXEL, и ограничивается посредством предварительно определенного значения CORRECT_LIMIT×COEFF1. На графике Фиг.2B, коэффициент K, служащий в качестве переменной, и переменное количество CORRECT_PIXEL пикселей для электронной коррекции вибраций имеет отношение к линейной функции, а COEFF1 указывает степень (угол наклона) изменения. Если CORRECT_PIXEL коэффициент K=COEFF1 × переменное количество CORRECT_PIXEL пикселей для электронной коррекции вибраций. Поскольку 0≤K≤1, то COEFF1 удовлетворяет отношению: 0 При оптической коррекции вибраций посредством системы 117 оптической коррекции вибрации корректируются таким образом, чтобы объектный световой пучок, падающий на датчик 120 изображения, всегда поступал на одну и ту же позицию поверхности восприятия изображения. Следовательно, могут быть исправлены даже вибрации в течение промежутка времени сбора, которые не могут быть исправлены посредством электронной коррекции вибраций. В частности, вибрации в течение промежутка времени сбора легко генерируются посредством высокочастотного компонента вибраций, который вызывает большую величину вибраций на единицу времени. Однако датчик 102 обнаружения вибраций с высокой точностью может обнаружить высокочастотный компонент вибраций, распространяющийся на устройство. Следовательно, система 117 оптической коррекции предпочтительно корректирует высокочастотный компонент вибраций, обнаруженный посредством датчика 102 обнаружения вибрации, то есть вибрации, распространяющиеся на устройство. Однако, как было описано выше, параметр обнаружения угловой скорости датчика 102 обнаружения вибраций, использующего датчик вибрации угловой скорости типа гироскопа, или подобного устройства ухудшается на низкой полосе частот 1 Гц или менее. В низкой полосе частот, влияние ошибки коррекции становится серьезным, и вибрации остаются неисправленными, приводя к низкому качеству воспринимаемого изображения. Для предотвращения этого, кроме того, внедряется средство 122 обнаружения вектора движения в дополнение к обнаружению посредством датчика 102 обнаружения вибраций. Средство 122 обнаружения вектора движения обнаруживает оставшиеся вибрации на низкой полосе частот, которые не могут быть обнаружены посредством датчика 102 обнаружения вибраций. Обнаруженные вибрации корректируются, улучшая способность коррекции. Однако, если все оставшиеся вибрации, обнаруженные посредством средства 122 обнаружения вектора движения, корректируются посредством электронной коррекции вибраций с использованием блока 124 управления считыванием памяти, качество изображения может ухудшиться вследствие вибраций в течение промежутка времени сбора данных перед формированием вибраций с большой амплитудой на низкой полосе частот. Следовательно, в настоящем изобретении, система 117 оптической коррекции корректирует некоторые (1-K кратно (0≤K≤1)) из оставшихся вибраций, обнаруженных посредством средства 122 обнаружения вектора движения. Это может расширить диапазон коррекций и улучшить способность коррекции вибраций с использованием как оптической коррекции вибраций, так и электронной коррекции вибраций в процессе сокращения вибраций в течение промежутка времени сбора данных. В первом варианте осуществления используется как оптическая коррекция вибраций, так и электронная коррекция вибраций для расширения диапазона коррекции вибраций и улучшения способности коррекции вибраций. По мере того как увеличивается переменное количество CORRECT_PIXEL пикселей для электронной коррекции вибраций, повышается коэффициент K для повышения степени электронной коррекции вибраций. Однако чрезмерное увеличение степени электронной коррекции вибраций делает заметными вибрации в течение промежутка времени сбора данных. Следовательно, коэффициент K ограничивается предварительно определенным значением CORRECT_LIMIT x COEFF1, с тем, чтобы вибрации в течение промежутка времени сбора данных не могли распознаваться человеческим глазом. В вышеупомянутом описании установлено, что 0 Как было описано выше, первый вариант осуществления может предоставлять устройство захвата изображения, которое улучшает способность коррекции вибраций с использованием как электронной, так и оптической системы коррекции вибраций, минимизируя вибрации в течение промежутка времени сбора данных. Второй вариант осуществления Будет разъясняться обработка определения коэффициента K посредством контроллера 130 векторного коэффициента в соответствии со вторым вариантом осуществления настоящего изобретения. Фиг.4A является блок-схемой последовательности операций способа, являющейся примером обработки посредством контроллера 130 векторного коэффициента. Данная обработка повторно выполняется в каждом предварительно определенном периоде, таком как 1/60 секунды. На этапе S20, контроллер 130 векторного коэффициента определяет в качестве значения (0≤K≤1) коэффициента K значение, полученное посредством сложения предварительно определенного значения K_MAX_WIDE со значением, полученным посредством умножения фокусного расстояния f устройства захвата изображений на предварительно определенный коэффициент COEFF2: коэффициент K=фокусное расстояние f устройства захвата изображений × предварительно определенный коэффициент COEFF2+ предварительно определенное значение K_MAX_WIDE для -K_MAX_WIDE/F_TELE≤COEFF2≤0 -F_TELE×COEFF2 где F_TELE является фокусным расстоянием на конце фотографического телеобъектива, а F_WIDE является фокусным расстоянием на конце широкоугольного объектива. Фокусное расстояние f вычисляется из текущей информации о позиции масштабирования, получаемой из кодировщика 119 масштабирования, который обнаруживает позицию масштабирования системы 118 оптического отображения. На этапе S21, контроллер 130 векторного коэффициента устанавливает определенный коэффициент K на первый блок 126 умножения и второй блок 128 умножения. Фиг.4B является графиком, являющимся примером применения значения коэффициента K, соответствующего значению фокусного расстояния f на этапе S20. Значение коэффициента K становится максимальным значением K_MAX_WIDE+F_WIDE×COEFF2 на фокусном расстоянии на конце широкоугольного объектива F_WIDE. Значение коэффициента K уменьшается для большего значения фокусного расстояния f и становится минимальным значением K_MAX_WIDE+FJTELE×COEFF2 на фокусном расстоянии на конце фотографического телеобъектива F_TELE. Установление значения коэффициента K имеет следующие преимущества. Полагая, что θ будет углом вибраций, распространяющихся на устройство, а f будет фокусным расстоянием устройства захвата изображений, можно приблизить величину вибраций на поверхности восприятия изображения к ftanθ. Если генерируется такая же величина вибраций, то величина вибраций на поверхности восприятия изображения увеличивается до большего фокусного расстояния f. Принимая это во внимание, во втором варианте осуществления коэффициент K уменьшается для большего фокусного расстояния f устройства захвата изображений, сокращая степень электронной коррекции вибраций. С этим регулированием вибрации в течение промежутка времени накопления не могут распознаваться человеческим глазом даже на большом фокусном расстоянии. Как было описано выше, второй вариант осуществления может предоставлять устройство захвата изображений, которое улучшает способность коррекции вибраций с использованием как электронной, так и оптической системы коррекции вибраций, минимизируя вибрации в течение промежутка времени накопления. Третий вариант осуществления Будет разъясняться обработка определения коэффициента K посредством контроллера 130 векторного коэффициента в соответствии с третьим вариантом осуществления настоящего изобретения. Фиг.5A является блок-схемой последовательности операций способа, являющейся примером обработки посредством контроллера 130 векторного коэффициента. Данная обработка повторно выполняется в каждом предварительно определенном периоде, таком как 1/60 секунды. На этапе S30, контроллер 130 векторного коэффициента определяет в качестве значения коэффициента K значение, получаемое посредством сложения предварительно определенного значения K_MAX_HIGH_SPEED со значением, полученным посредством умножения скорости затвора SS устройства захвата изображений на предварительно определенный коэффициент COEFF3: коэффициент K=скорость затвора SS×предварительно определенный коэффициент COEFF3 + предварительно определенное значение K_MAX_HIGH_SPEED Полагая, что SLOW_SS будет самой медленной скоростью затвора устройства захвата изображений, соблюдаются отношения: -K_MAX_HIGH_SPEED/SLOW_SS -SLOW_SS×COEFF3 Фиг.5B является графиком, являющимся примером изменения значения коэффициента K, соответствующего значению скорости затвора SS на этапе S30. Значение коэффициента K становится максимальным значением K_MAX_HIGH_SPEED+HIGH_SS×COEFF3 при самой высокой скорости затвора HIGH_SS. Значение коэффициента K уменьшается для более медленной скорости затвора SS и становится минимальным значением K_MAX_HIGH_SPEED+SLOW_SS×COEFF3 при самой медленной скорости затвора SLOW_SS. В третьем варианте осуществления, самая медленная скорость затвора SLOW_SS может быть установлена на 1/60 секунды, что является циклом обработки контроллера 130 векторного коэффициента. Данное регулирование значения коэффициента K имеет следующие преимущества. Величина вибраций в течение промежутка времени накопления повышается для более медленной скорости затвора. Следовательно, в третьем варианте осуществления, коэффициент K уменьшается для более медленной скорости затвора SS устройства захвата изображений, сокращая степень электронной коррекции вибраций. С данным регулированием, вибрации в течение промежутка времени сбора данных не могут распознаваться человеческим глазом даже при медленной скорости затвора. Как было описано выше, третий вариант осуществления может предоставить устройство захвата изображения, которое улучшает способность коррекции вибраций с использованием как электронной, так и оптической системы коррекции вибраций, минимизируя вибрации в течение промежутка времени сбора данных. В то время как настоящее изобретение было описано со ссылкой на иллюстративные варианты осуществления, следует подразумевать, что изобретение не ограничивается раскрытыми иллюстративными вариантами осуществления.
Реферат
Изобретение относится к устройствам захвата изображения. Техническим результатом является предотвращение ухудшения качества захватываемого изображения, вызванного вибрацией. Результат достигается тем, что устройство захвата изображения содержит средство восприятия изображения для восприятия изображения объекта, сформированного посредством оптической системы; средство обнаружения вибраций для обнаружения вибраций, распространяющихся на устройство захвата изображений; средство обнаружения вектора для обнаружения вектора движения из воспринимаемого изображения посредством средства восприятия изображения; первое средство вычисления для вычисления первой величины коррекции из сигнала, полученного на основе выхода от средства обнаружения вибраций, и сигнала на основе вектора движения; второе средство вычисления для вычисления второй величины коррекции на основе вектора движения; первое средство коррекции для оптической коррекции вибрации на основе первой величины коррекции; и второе средство коррекции для коррекции вибрации посредством изменения области считывания изображения на основе второй величины коррекции, в котором коррекция вибрации выполняется с использованием как первого средства коррекции, так и второго средства коррекции. 2 н. и 5 з.п. ф-лы, 8 ил.
Формула
средство восприятия изображения, выполненное с возможностью восприятия изображения объекта, сформированного посредством оптической системы;
средство обнаружения вибрации, выполненное с возможностью обнаружения вибрации, распространяющейся на устройство захвата изображения;
средство обнаружения вектора, выполненное с возможностью обнаружения вектора движения из изображения, воспринимаемого вышеупомянутым средством восприятия изображения;
первое средство вычисления, выполненное с возможностью вычисления первой величины коррекции из сигнала, полученного на основе выхода вышеупомянутого средства обнаружения вибрации, и сигнала на основе вектора движения;
второе средство вычисления, выполненное с возможностью вычисления второй величины коррекции на основе вектора движения;
первое средство коррекции, выполненное с возможностью оптической коррекции вибрации на основе первой величины коррекции; и
второе средство коррекции, выполненное с возможностью электронной коррекции вибрации посредством изменения области считывания изображения на основе второй величины коррекции, при этом устройство захвата изображения расположено таким образом, что коррекция вибрации выполняется с использованием как вышеупомянутого первого средства коррекции, так и вышеупомянутого второго средства коррекции.
вышеупомянутое второе средство вычисления выполнено с возможностью вычисления второй величины коррекции на основе сигнала, полученного посредством умножения вектора движения на предварительно определенный коэффициент К, где 0≤К≤1.
обнаруживают вибрации, распространяющиеся на устройство захвата изображений;
обнаруживают вектор движения из изображения, воспринимаемого посредством средства восприятия изображений;
вычисляют первую величину коррекции из сигнала, полученного на основе выхода при обнаружении вибраций, и сигнала на основе вектора движения;
вычисляют вторую величину коррекции на основе вектора движения;
оптически исправляют вибрацию на основе первой величины коррекции; и
корректируют вибрацию посредством изменения области считывания изображения на основе второй величины коррекции,
при этом коррекция вибрации выполняется с использованием как оптической коррекции вибрации, так и электронной коррекции вибраций.
Комментарии