Облегченный беспроводной ультразвуковой датчик - RU2502470C2
Код документа: RU2502470C2
Чертежи
















Описание
Настоящее изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, облегченным беспроводным ультразвуковым датчикам.
Один из давних недостатков медицинской ультразвуковой диагностики, особенно с точки зрения специалистов по ультразвуковой эхографии, состоит в кабеле, который соединяет сканирующий датчик с ультразвуковой системой. Упомянутые кабели имеют большую длину и часто толщину из-за необходимости вмещения множества коаксиальных линий от нескольких десятков, сотен или даже тысяч элементов-преобразователей в датчике. В результате, упомянутые кабели датчиков могут создавать сложности при обращении и иметь большой вес. Некоторые специалисты по ультразвуковой эхографии пробуют справиться с проблемой кабеля перекидыванием кабеля через руку или плечо для поддержки во время сканирования. Это может приводить к многократным повреждениям от давления во многих случаях. Другая проблема состоит в том, что кабель датчика может инфицировать стерильное поле хирургической операции с навигацией по изображениям. Кроме того, упомянутые кабели датчиков стоят довольно дорого и часто являются самым дорогим компонентом датчика. Таким образом, давно существует потребность в избавлении ультразвуковой диагностики от кабелей датчиков.
В патенте США № 6142946 (Hwang et al.) описан ультразвуковой датчик и система, которые работают именно таким способом. В данном патенте описан батарейный датчик с матричным преобразователем и встроенным формирователем луча. Приемопередатчик посылает собранные ультразвуковые данные в ультразвуковую систему, выполняющую функцию его базовой станции. Обработка и отображение изображений выполняется в ультразвуковой системе.
Полностью интегрированный беспроводной ультразвуковой датчик ставит проблему веса датчика. Хотя беспроводной датчик избавлен от тяжелого объемного кабеля, датчик все еще нуждается в снижении веса и повышении удобства манипулирования, чтобы исключить проблемы эргономичности при многократном применении. От датчика требуется сканировать и фокусировать пучки по двумерной или трехмерной области тела, формировать пучки принятых эхо-сигналов и передавать и принимать эхо-сигналы и управляющую информацию. Все компоненты для упомянутых функций вносят вклад в вес датчика. Кожух датчика и батарея дополнительно увеличивают вес. Соответственно, данный датчик следует сформировать так, чтобы обеспечить все функции, но не создавать проблемы веса для пользователя.
В соответствии с принципами настоящего изобретения, предлагается беспроводной ультразвуковой датчик, который имеет малый вес и удобен для пользователя. Датчик содержит матричный преобразователь и микроформирователь луча на интегральной схеме, подсистему сбора данных на интегральной схеме, приемопередатчик на интегральной схеме и антенну, и электронные соединения между данными компонентами. Батарея и подсистема питания обеспечивают необходимую энергию для возбуждения матрицы преобразователя и передачи ультразвуковых данных в базовую станцию. Компоненты заключены в ручной корпус, и укомплектованный датчик весит не более 300 грамм.
На чертежах:
фиг.1a - изображение ручного беспроводного ультразвукового датчика в соответствии с настоящим изобретением.
Фиг.1b - изображение беспроводного ультразвукового датчика и присоединенного пользовательского интерфейса в соответствии с настоящим изобретением.
Фиг.1c - изображение беспроводного пользовательского интерфейса для беспроводного датчика в соответствии с настоящим изобретением.
Фиг.2a, 2b и 2c - изображения разных систем ультразвуковой визуализации, которые могут служить как базовые станции для беспроводного датчика в соответствии с настоящим изобретением.
Фиг.3 - изображение функциональных компонентов беспроводного 1-мерного матричного датчика в соответствии с настоящим изобретением.
Фиг.4 - изображение функциональных компонентов беспроводного 2-мерного матричного датчика в соответствии с настоящим изобретением.
Фиг.5 - блок-схема основных электронных подсистем между формирователем луча и антенной беспроводного датчика в соответствии с настоящим изобретением.
Фиг.6 - блок-схема основных компонентов хост-узла базовой станции для беспроводного датчика в соответствии с настоящим изобретением.
Фиг.7 - блок-схема подсистемы сбора данных, пригодной для применения в беспроводном датчике в соответствии с настоящим изобретением.
Фиг.8a и 8b - виды в разрезе облегченного беспроводного датчика в соответствии с настоящим изобретением.
Фиг.9a и 9b - примеры пользовательского интерфейса беспроводного датчика.
Фиг.10a и 10b - изображения USB-кабеля для беспроводного датчика в соответствии с настоящим изобретением.
Фиг.11 - схема использования определения расстояний для обнаружения и определения местоположения беспроводного датчика в соответствии с настоящим изобретением.
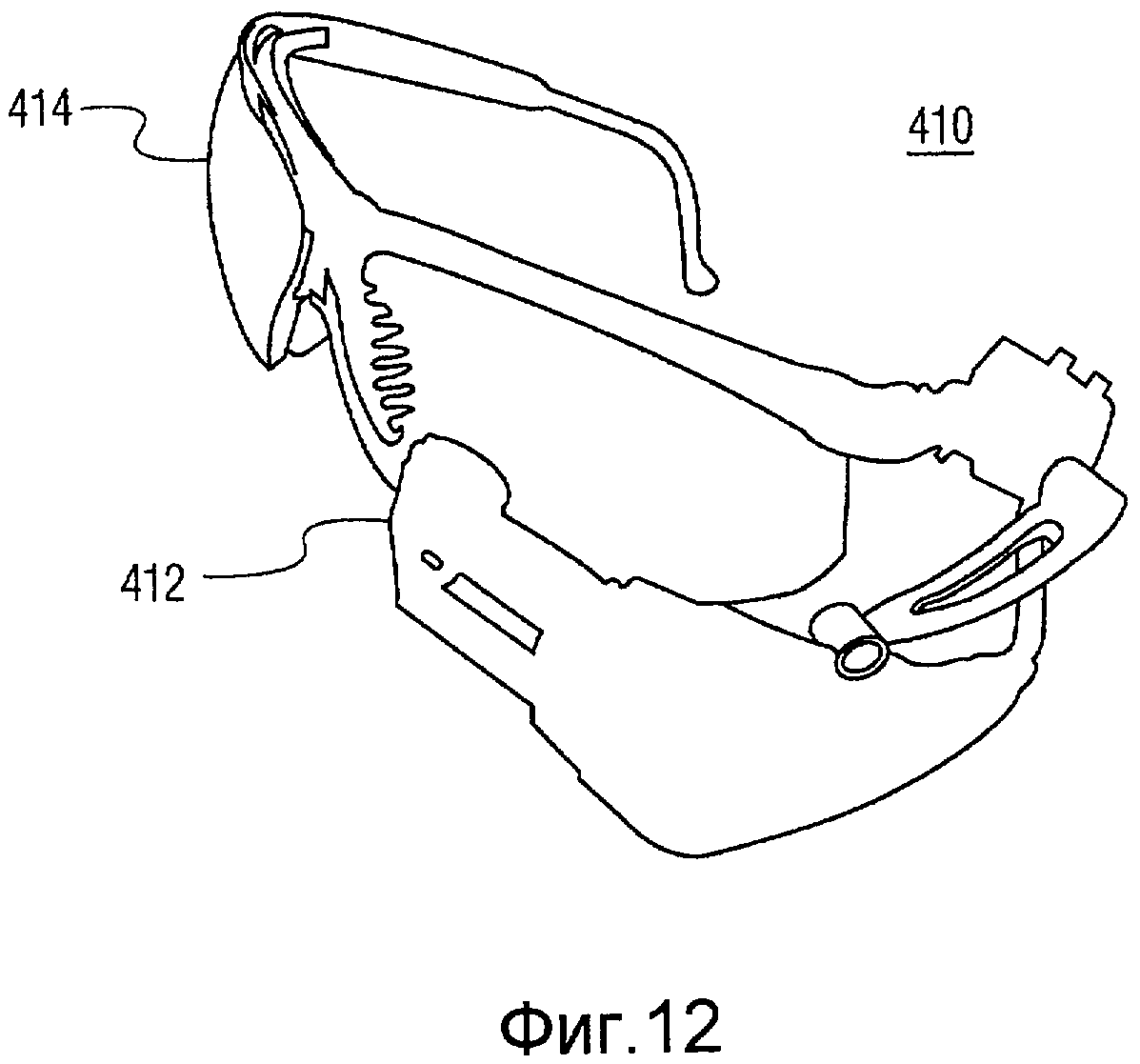
Фиг.12 - изображение головной гарнитуры визуализации, пригодной для применения с беспроводным датчиком в соответствии с настоящим изобретением.
Фиг.13 - изображение беспроводной гарнитуры радиотелефонного приемопередатчика стандарта Bluetooth для применения с беспроводным датчиком в соответствии с настоящим изобретением.
Фиг.14 - беспроводной датчик в соответствии с настоящим изобретением в ходе применения с несколькими другими беспроводными устройствами.
На фиг.1 показан беспроводной ультразвуковой датчик 10 в соответствии с настоящим изобретением. Датчик 10 заключен в твердый полимерный кожух или корпус 8, который имеет дистальный конец 12 и проксимальный конец 14. На дистальном конце 12 находится линза преобразователя или акустическое окно 12 для матричного преобразователя. Сквозь данное акустическое окно посылаются ультразвуковые волны матрицей преобразователя и принимаются возвращающиеся эхо-сигналы. Антенна расположена внутри корпуса на проксимальном конце 14 датчика, который передает и принимает радиоволны 16 в хост-узел базовой станции и из него. Контакты для зарядки батареи также расположены на проксимальном конце датчика, как показано на фиг.10a и 10b. На боковой стороне датчика 10 находится обычная лево-правосторонняя метка 18, которая обозначает боковую сторону датчика, соответствующую левой или правой стороне изображения. Смотри патент США 5255682 (Pawluskiewicz et al.). Как показано, проксимальный участок корпусной части датчика уже, чем более широкий дистальный конец датчика. Обычно так делают для того, чтобы пользователь мог захватывать зауженный проксимальный конец и прилагать усилие к расширенному дистальному концу, когда требуется особенно плотный контакт с кожей пациента. Корпус 8 датчика герметизирован, чтобы его можно было промывать и протирать для удаления геля и можно стерилизовать после использования.
На фиг.1b показан другой пример беспроводного датчика 10' в соответствии с настоящим изобретением, который содержит подсоединенный приемопередающий пользовательский интерфейс 22. Корпус 8' датчика в настоящем примере содержит матричный преобразователь и может также содержать другие компоненты, например, формирователь луча и подсистему сбора данных. Однако данные другие компоненты могут в альтернативном варианте находиться в приемопередающем пользовательском интерфейсе 22, который имеет размеры, которые допускают размещение элементов пользовательского управления, показанные на верхней поверхности интерфейса и описаны в связи с фиг.1c. Элементы управления предпочтительно исполнены в таком виде, который допускает удобную очистку в условиях ультразвуковой диагностики, в которых присутствует гель, например, герметичной мембраны или сенсорного экрана. Выбор местоположения вышеупомянутых других компонентов будет влиять на кабель 20, который соединяет датчик 10' с пользовательским интерфейсом 22. Если в корпусе 8' датчика находится только матричный преобразователь, то кабель 20 будет содержать проводники для всех элементов матрицы между матрицей преобразователя и формирователем луча в пользовательском интерфейсе 22. Если формирователь луча расположен в корпусе 8' датчика, что предпочтительнее, то кабель 20 может быть тоньше, так как от кабеля требуется пропускание только сфокусированных формирователем луча или детектированных (а не поэлементных) сигналов и сигналов питания преобразователя и управления им. Смотри патент США 6,102,863 (Pflugrath et al.). Кабель 20 может иметь долговременное соединение с пользовательским интерфейсом 22, но, предпочтительно, соединен с разъемным соединителем, чтобы датчик 10' можно было отсоединять, чистить, промывать и стерилизовать или заменять другим датчиком.
В данном варианте осуществления приемопередающий пользовательский интерфейс 22 содержит радиоприемопередатчик и антенну, которая поддерживает связь с хост-системой базовой станции. На нижней поверхности пользовательского интерфейса 22 находится ремешок или браслет 24 для кисти. Данный ремешок или браслет может закрепляться эластично или на липучке (Velcro) и охватывать предплечье пользователя. Следовательно, пользователь-правша будет носить пользовательский интерфейс 22 с верхней стороны правого предплечья и при этом удерживать датчик 10' в правой руке и манипулировать элементами пользовательского управления на правом предплечье пальцами левой руки.
На фиг.1c показан беспроводной пользовательский интерфейс 32 для беспроводного датчика в соответствии с настоящим изобретением. Хотя беспроводной датчик 10 может, по желанию, содержать несколько простых элементов управления, как поясняется ниже, многие пользователи предпочтут, чтобы элементы пользовательского управления были полностью отделены от беспроводного датчика. В данном случае беспроводной датчик 10 может содержать только один двухпозиционный переключатель или совсем не содержать элементов управления, и элементы пользовательского управления для работы с датчиком могут быть элементами управления ультразвуковой системой (42, смотри фиг.2a) или элементами пользовательского управления беспроводным пользовательским интерфейсом 32. Пример беспроводного пользовательского интерфейса 32 на фиг.1c содержит передатчик, который передает радиочастотные или инфракрасные, или другие беспроводные сигналы 16' управления либо непосредственно в беспроводной датчик 10, или хост-узел базовой станции для последующей трансляции в беспроводной датчик. В показанном примере пользовательский интерфейс 32 получает питание от батареи и содержит двухпозиционный переключатель 33 для пользовательского интерфейса и/или беспроводного датчика. В наличии имеются также основные элементы управления датчика, например, кнопка 35 стоп-кадра и кулисный переключатель 34 для перемещения курсора. Другими элементами управления, которые могут присутствовать, являются элементы управления режимом и кнопка выделения. Данный пример содержит также индикатор 36 заряда батареи и индикатор 37 уровня сигнала, которые показывают упомянутые параметры для беспроводного датчика 10, для беспроводного пользовательского интерфейса 32 или того и другого. Беспроводным пользовательским интерфейсом можно управлять, когда он удерживается рукой пользователя или установлен у постели пациента во время обследования последнего.
На фиг.2a-2c представлены примеры подходящих хост-систем базовой станции для беспроводного ультразвукового датчика в соответствии с настоящим изобретением. На фиг.2a показана ультразвуковая система 40, смонтированная на тележке, с нижней секцией для электронных схем системы и источника питания. Система 40 содержит панель 42 управления, которая служит для управления работой системы и может применяться для управления беспроводным датчиком. Элементы управления на панели управления, которую можно использовать для управления датчиком, содержат трекбол, клавишу выбора, ручку регулировки усиления, кнопку стоп-кадра изображения, элементы управления режимом и т.п. Ультразвуковые изображения, формируемые по сигналам, принятым из беспроводного датчика, отображаются на дисплее 46. В соответствии с принципами настоящего изобретения, система 40, смонтированная на тележке, содержит, по меньшей мере, одну антенну 44 для передачи и приема сигналов 16, которыми обмениваются беспроводной датчик и хост-система. В альтернативном варианте можно использовать другие методы связи, кроме радиочастотных сигналов, например, инфракрасный канал передачи данных, между датчиком и системой.
На фиг.2b показана хост-система, выполненная в конструктиве носимого персонального компьютера. Корпус 50 вмещает электронные схемы хост-системы, содержащие приемопередатчик для связи с беспроводным датчиком. Приемопередатчик может находиться внутри корпуса 50, в ячейке корпуса для дополнительного оборудования, например, типа ячейки для накопителя данных или батареи. Приемопередатчик может быть также выполнен в виде платы PCMCIA-карты (карты адаптера для подключения к компьютерной сети портативных устройств) или дополнительного устройства с подключением к системе через USB-разъем, как описано в публикации международной заявки WO 2006/111872 (Польша). По меньшей мере, одна антенна 54 соединена с приемопередатчиком. Беспроводной датчик может работать с управлением от панели 52 управления системы, и ультразвуковые изображения, сформированные по сигналам датчика, отображаются на дисплее 56.
На фиг.2c ручной блок 60 отображения с батарейным питанием, пригодный для применения в качестве хост-системы для беспроводного датчика в соответствии с настоящим изобретением. Блок 60 имеет ужесточенный корпус, предназначенный для применения в окружающих условиях, в которых осуществляется много физических манипуляций, например, в санитарно-транспортном средстве, отделении неотложной помощи или службе неотложной помощи (EMT). Блок 60 содержит элементы 62 управления для управления датчиком и блоком 60 и содержит приемопередатчик, который осуществляет связь с помощью антенны 64.
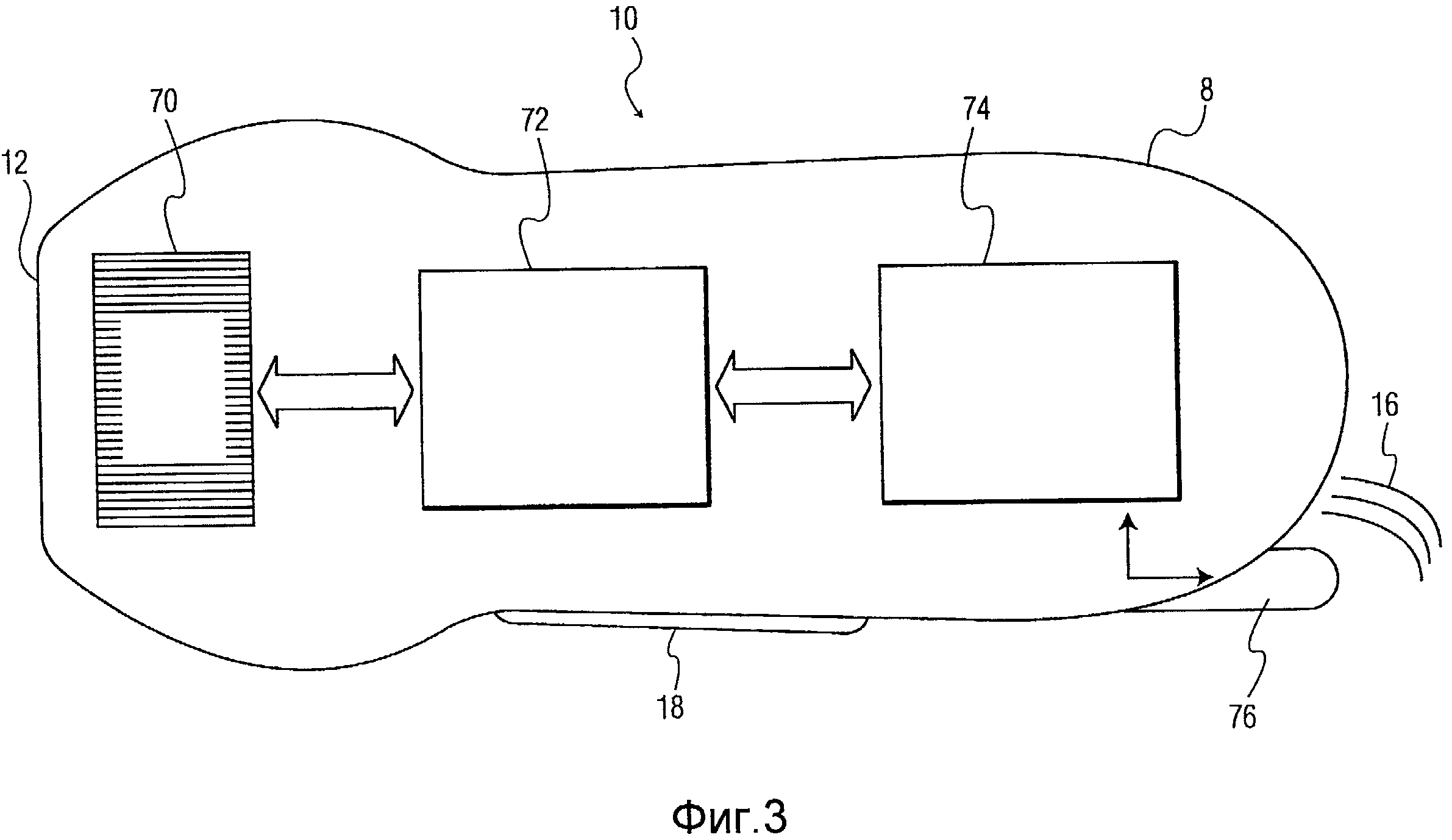
На фиг.3 показан беспроводной датчик 10 в соответствии с настоящим изобретением, сконструированный для получения двумерных изображений. Чтобы сканировать плоскость двумерного изображения, датчик 10 использует одномерную (1-мерную) матрицу 70 преобразователей, расположенную на дистальном конце 12 датчика около акустического окна датчика. Матрица преобразователей может быть сформирована керамическими пьезоэлектрическими элементами-преобразователями, пьезоэлектрическим полимером (PVDF - поливинилиденфторид) или может представлять собой полупроводниковый ультразвуковой преобразователь, полученный методом микрообработки (MUT), например, матрицу элементов PMUT (пьезоэлектрических MUT), или CMUT (емкостных MUT). 1-мерный матричный преобразователь 70 возбуждается и эхо-сигналы обрабатываются, по меньшей мере, одной ASIC (специализированной интегральной схемой) 72 сжатия данных микроформирователя луча. Микроформирователь 72 луча принимает эхо-сигналы из элементов 1-мерной D матрицы преобразователей и задерживает и группирует поэлементные эхо-сигналы в небольшое число частично сфокусированных формирователем луча сигналов. Например, микроформирователь 72 луча может принимать эхо-сигналы из 128 элементов-преобразователей и группировать упомянутые сигналы для формирования восьми частично сфокусированных формирователем луча сигналов и, тем самым, для сокращения числа сигнальных трактов со 128 до восьми. Микроформирователь 72 луча может быть также выполнен с возможностью формирования полностью сфокусированных формирователем луча сигналов от всех элементов активной апертуры, как описано в вышеупомянутом патенте США 6,142,946. В предпочтительном варианте осуществления полностью сфокусированные формирователем луча и детектированные сигналы формируются датчиком для беспроводной передачи в базовую станцию так, чтобы снижать скорость передачи данных до уровня, который обеспечивает приемлемую визуализацию в реальном времени. Технология микроформирователя луча, подходящая для использования в формирователе 72 луча, описана в патентах США 5229933 (Larson III), 6375617 (Fraser) и 5997479 (Savord et al.). Сфокусированные формирователем луча эхо-сигналы вводятся в управляющую и приемопередающую подсистему 74 датчика, которая передает сфокусированные формирователем луча сигналы в хост-систему, в которой они могут подвергаться дополнительной обработке по формированию луча и затем обработке для формирования и отображения изображений. Управляющая и приемопередающая подсистема 74 датчика принимает также сигналы управления из хост-системы, когда датчик работает с управлением от хост-узла, и вводит соответствующие сигналы управления в микроформирователь 72 луча для, например, фокусировки пучков на требуемой глубине или посылки и приема сигналов требуемого режима (доплеровского, B-режима) в требуемую область изображения и из данной области. На упомянутой выше фигуре не показаны подсистема питания и батарея для питания датчика, которые описаны ниже.
Приемопередатчик управляющей и приемопередающей подсистемы 74 датчика передает и принимает радиочастотные сигналы с помощью штыревой антенны 76, аналогичной антенне сотового телефона. Штыревая антенна обеспечивает одно из таких же преимуществ, как антенна на сотовом телефоне, которое состоит в том, что малогабаритные обводы антенны делают ее удобной для удерживания и ношения и снижают вероятность повреждения. Однако в настоящем варианте осуществления беспроводного датчика штыревая антенна 76 служит для дополнительной цели. Когда специалист по ультразвуковой эхографии держит обычный, снабженный кабелем датчик, датчик захватывается сбоку, как захватывают толстый карандаш. Беспроводной датчик, например датчик, показанный на фиг.1a, можно удерживать таким же образом, однако поскольку датчик не содержит кабеля, его можно также держать с захватом проксимального конца датчика. Это невозможно сделать с обычным, снабженным кабелем датчиком из-за присутствия кабеля. У пользователя беспроводного датчика может появляться желание удерживать беспроводной датчик за проксимальный конец, чтобы прилагать большое усилие к телу для улучшения акустического контакта. Однако охватывание рукой проксимального конца датчика, когда антенна находится внутри проксимального конца датчика, будет экранировать антенну от передачи и приема сигнала и может привести к ненадежности связи. Как выяснилось, применение антенны, которая выступает из проксимального конца датчика, не только расширяет поле антенны далеко наружу от корпуса датчика, но также препятствует удерживанию датчика за проксимальный конец вследствие неудобства нажима на штыревую антенну. Вместо этого пользователь, вероятнее всего, будет захватывать датчик сбоку обычным образом, с оставлением поля антенны открытым для качественного приема и передачи сигнала. Для улучшения приема конфигурация антенны хост-узла базовой станции может вносить разнос по эффектам поляризации и ориентации путем создания двух совместно работающих диаграмм направленности с разными поляризациями. В альтернативном варианте антенна может быть единственной высокоэффективной симметричной вибраторной антенной с подходящей диаграммой направленности с одной поляризацией. При расположении антенны на проксимальном конце датчика диаграмма направленности датчика может продолжаться радиально относительно продольной оси датчика и подходящим образом пересекать диаграмму направленности хост-узла базовой станции. Такого рода диаграмма направленности датчика может быть эффективной с антеннами хост-узла базовой станции, находящими на потолке, как можно установить в хирургическом блоке. Как выяснилось также, при данной диаграмме направленности датчика прием является эффективным при отражениях от стен кабинета и других поверхностей, которые часто расположены вплотную к месту ультразвукового исследования. Обычно десятиметровая зона действия достаточна для большинства исследований, так как датчик и хост-узел базовой станции находятся в непосредственной близости друг к другу. Применяемые частоты связи могут находиться в 4-ГГц диапазоне, и полимеры, подходящие для корпуса датчика, например, ABS (акрилонитрил-бутадиен-стирол) характеризуются относительной прозрачностью к радиочастотным сигналам на данных частотах. Высокочастотную связь можно улучшить в хост-узле базовой станции, где можно применить несколько антенн для повышения разноса в вариантах осуществления, в которых несколько антенн не являются громоздкими, какими они могли бы быть в беспроводном датчике. Смотри, например, публикацию международной заявки WO 2004/051882, «Delay Diversity In A Wireless Communications System». Несколько антенн могут использовать разные поляризации и местоположения для обеспечения надежной связи, даже при изменении линейных и угловых ориентаций, принимаемых датчиком во время типичного ультразвукового исследования. При типичной манипуляции датчиком возможен поворот датчика в диапазоне 360° углов поворота и наклона в приблизительно полусферическом диапазоне отклонения углов от вертикали. Следовательно, диаграмма направленности дипольного излучения, отцентрированная по центральной продольной оси датчика, будет оптимальной для одной антенны, и ее местоположение на проксимальном конце оказалось наиболее желательным. Диаграмму направленности антенны можно выставлять точно по данной центральной оси или со смещением, но по-прежнему приблизительно в параллельной ориентации относительно данной центральной оси.
На фиг.4 представлен другой пример беспроводного датчика 10 в соответствии с настоящим изобретением. В данном примере беспроводной датчик содержит двумерный матричный преобразователь 80 в качестве чувствительного элемента датчика, который позволяет формировать как двумерные, так и трехмерные изображения. 2-мерный матричный преобразователь 80 связан с микроформирователем 82 луча, который предпочтительно выполнен в виде ASIC, монтируемой методом перевернутого кристалла и присоединенной непосредственно к сборке матричного преобразователя. Как и в случае беспроводного датчика, показанного на фиг.3, между микроформирователем луча и управляющей и приемопередающей подсистемой 74 датчика передаются полностью сфокусированные формирователем луча и детектированные эхо-сигналы и сигналы управления датчиком.
Типичная управляющая и приемопередающая подсистема 74 датчика для беспроводного датчика в соответствии с настоящим изобретением показана на фиг.5. Батарея 92 питает беспроводной датчик и связана со схемой 90 источника и регулятора питания. Схема источника и регулятора питания преобразует напряжение батареи в несколько напряжений, необходимых для компонентов беспроводного датчика, содержащего матрицу преобразователя. Для типичного представленного датчика может требоваться, например, девять разных напряжений. Схема источника и регулятора питания обеспечивает также управление зарядкой во время подзарядки батареи 92. В представленном варианте осуществления батарея является литиевой полимерной батареей, которая является призматической и может быть выполнена в подходящей форме для пространства, доступного под батарею внутри корпуса датчика.
Модуль 94 сбора данных обеспечивает связь между микроформирователем луча и приемопередатчиком. Модуль сбора данных подает сигналы синхронизации и управления в микроформирователь пучка, чем обеспечивает направление распространения ультразвуковых волн и прием из микроформирователя луча, по меньшей мере, частично сфокусированных формирователем луча эхо-сигналов, которые демодулируются и детектируются (и по желанию преобразуются в другой стандарт развертки) и передаются в приемопередатчик 96 для передачи в хост-узел базовой станции. Подробная блок-схема подходящего модуля сбора данных показана на фиг.7. В данном примере модуль сбора данных поддерживает связь с приемопередатчиком по параллельной шине или шине USB таким образом, что, при необходимости, можно использовать USB-кабель, как поясняется ниже. Если применяют шину USB или другую шину, то она может обеспечивать альтернативное проводное соединение с хост-узлом базовой станции по кабелю, с обходом, тем самым, приемопередающего участка 96, как поясняется ниже.
Громкоговоритель 102, который возбуждается усилителем 104 и выдает акустические сигналы или звуки, также связан с модулем 94 сбора данных и получает питание из схемы 90 источника и регулятора питания. В предпочтительном варианте осуществления громкоговоритель 102 является пьезоэлектрическим громкоговорителем, расположенным внутри корпуса 8, и который может находиться за мембраной или стенкой корпуса для хорошей акустики и уплотнения. Громкоговоритель можно применять для формирования множества различных звуков или тональных сигналов, или даже голосовых сообщений. Громкоговоритель имеет множество различных применений. Если беспроводной датчик перемещают слишком далеко от хост-узла так, что прием сигнала хост-узлом или датчиком становится ненадежным или даже полностью пропадает, громкоговоритель может издавать звуковой сигнал для предупреждения пользователя. Громкоговоритель может издавать звуковой сигнал, когда заряд батареи становится слабым. Громкоговоритель может испускать тональный сигнал, когда пользователь нажимает кнопку или элемент управления на датчике, чем обеспечивается звуковая обратная связь по включению элемента управления. Громкоговоритель может обеспечивать тактильную обратную связь на основании ультразвукового исследования. Громкоговоритель может испускать звук, когда включают элемент управления поискового вызова для определения местоположения датчика. Громкоговоритель может формировать доплеровские аудиосигналы во время доплеровского исследования или тона сердца, когда датчик используют как стетоскоп.
Приемопередатчик в данном примере - набор 96 сверхширокополосных интегральных схем (ИС). Как оказалось, сверхширокополосный приемопередатчик имеет скорость передачи данных, которая обеспечивает частоты кадров, подходящие для визуализации в реальном времени, а также зону действия, подходящую для приемлемого уровня мощности, потребляемой от батареи. Наборы сверхширокополосных ИС доступны из множества разных источников, например, General Atomics, San Diego, California; WiQuest, Allen, Texas; Sigma Designs, Milpitas, California; Focus Semiconductor, Hillsboro, Oregon; Alereon, Austin, Texas; и Wisair of Campbell, California.
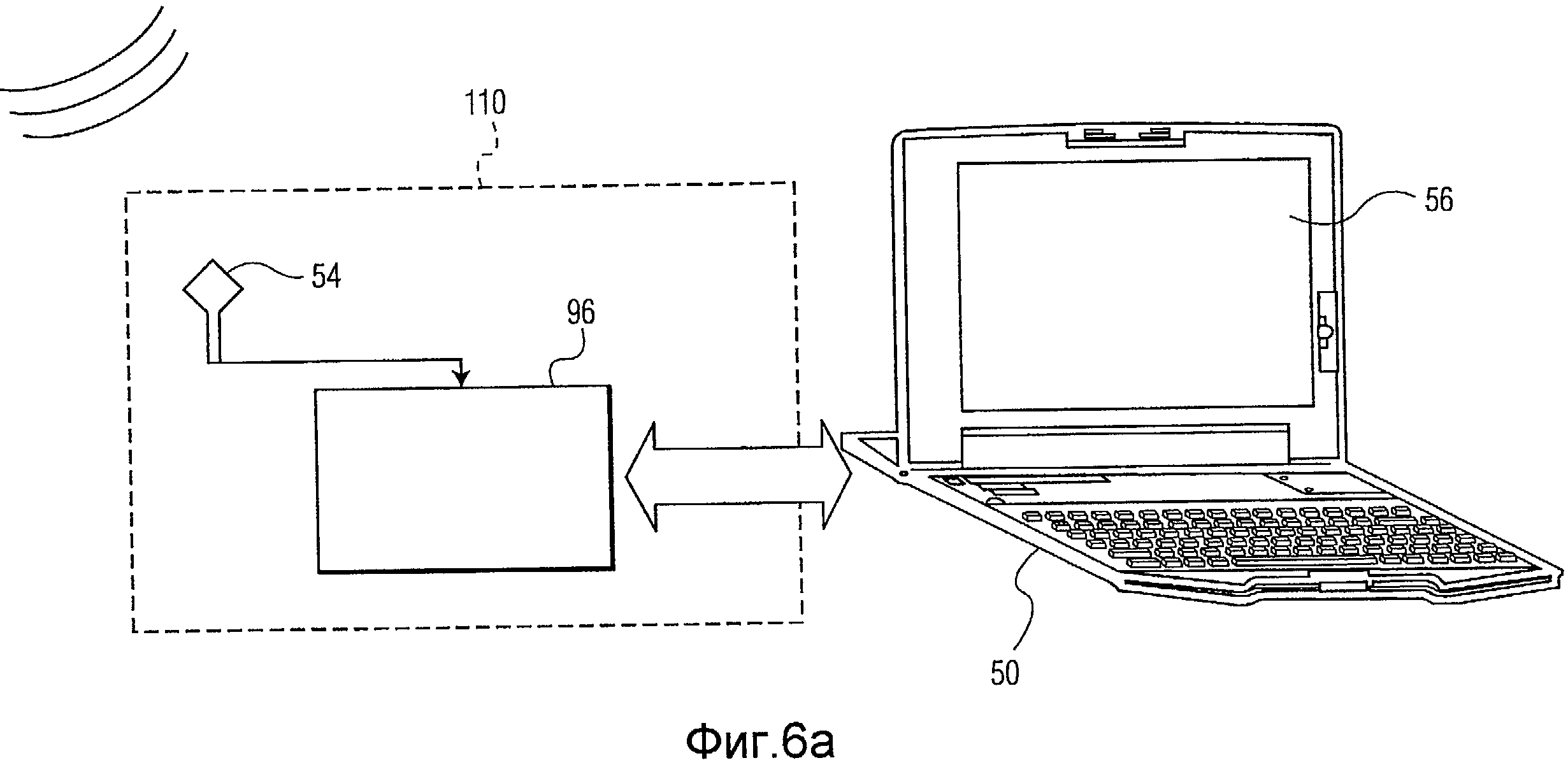
На фиг.6a показан сигнальный тракт беспроводного датчика в хост-узле базовой станции, который, в данном случае показан в конфигурации 50 носимого персонального компьютера. Антенна 54 связана с идентичным или совместимым набором 96 сверхширокополосных ИС, который выполняет передачу и прием в хост-узле. В предпочтительном варианте осуществления для конфигурации носимого персонального компьютера антенна 54 и набор сверхширокополосных ИС выполнены в виде «программного ключа» 110, который подсоединяется по шине USB, как показано на фиг.6b, и вставляется в USB-порт хост-системы 50 и получает питание через данный порт.
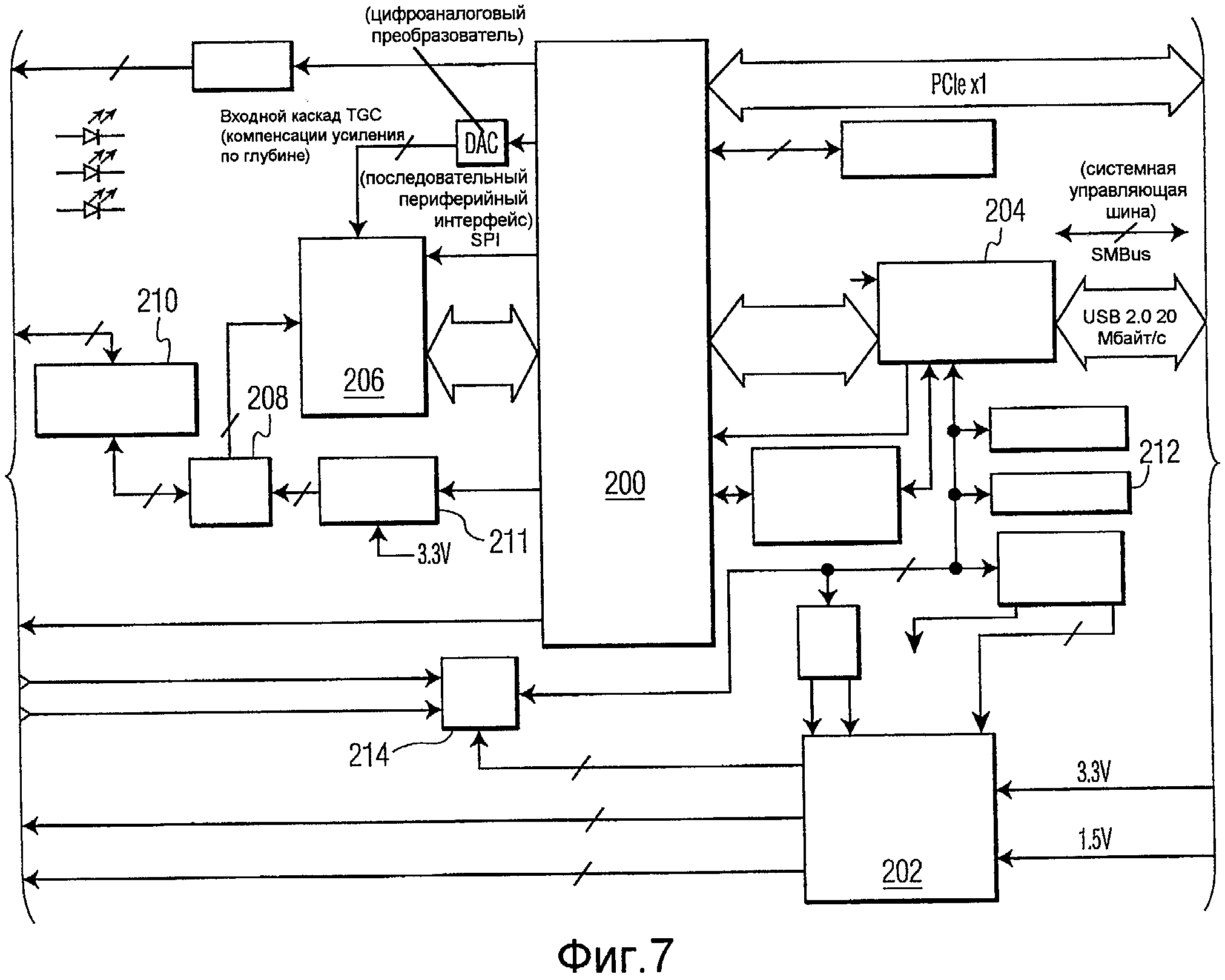
Пример модуля сбора данных, пригодного для применения в беспроводном датчике в соответствии с настоящим изобретением, показан на фиг.7. С левой стороны данного чертежа показаны сигналы, вводимые в микроформирователь луча и сборку матрицы преобразователей и выводимые из них. Упомянутые сигналы содержат сигналы этапа TGC (компенсации усиления по глубине), индивидуальные сигналы сфокусированных формирователем луча эхо-сигналов из микроформирователя луча, другие сигналы данных и синхронизации для микроформирователя луча, сигналы термистора и переключения для контроля перегрева на дистальном конце датчика, источники низкого напряжения питания для микроформирователя луча и высокие напряжения, в настоящем примере +/-30 Вольт, для возбуждения элементов-преобразователей матрицы. С правой стороны чертежа показаны соединения с приемопередатчиком и, как описано ниже, проводники USB и напряжения из проводника USB или от батареи. Упомянутые напряжения поставляют мощность для источников питания, вольтодобавочных/промежуточных преобразователей для преобразования постоянного напряжения и стабилизаторов 202 LDO (с малым падением напряжения), которые стабилизируют разные уровни напряжения, необходимые для беспроводного блока, содержащие напряжения возбуждения подсистемы сбора данных и матрицы преобразователей. Данная подсистема контролирует также напряжение батареи, которое замеряется последовательным ADC (аналого-цифровым преобразователем) 214, и измеренное значение используется для отображения остаточной энергии батареи и для инициирования мер по экономии энергопотребления, как описано ниже. Подсистема 202 выключает датчик, если напряжение батареи доходит до уровня, который повлек бы повреждение батареи. Подсистема также контролирует напряжения, потребляемые датчиком и электронными схемами сбора данных, и аналогично выключает их, если любое достигает небезопасных уровней.
Основой модуля сбора данных является FPGA (программируемая пользователем вентильная матрица) 200 контроллера. Данная FPGA работает как конечный автомат для управления синхронизацией, режимом и характеристиками посылки и приема ультразвуковых волн. Кроме того, FPGA 200 управляет формированием луча при посылке и приеме. FPGA 200 содержит цифровой сигнальный процессор (DSP), который можно программировать для обработки принятых эхо-сигналов различными требуемыми способами. По существу, FPGA 200 управляет всеми аспектами посылки и приема ультразвука. Принятые эхо-сигналы вводятся в FPGA 200 восьмеричной входной ASIC 206. ASIC 206 содержит A/D (аналого-цифровые) преобразователи, преобразующие эхо-сигналы, принимаемые из микроформирователя луча, в цифровые сигналы. Усилители с переменным усилением в составе ASIC применяются для применения этапа TGC к принятым эхо-сигналам. Принятые эхо-сигналы фильтруются фильтрами 210 реконструкции и пропускаются через переключатель 208 передачи/приема во входную ASIC 206. Для излучения ультразвуковых волн сигналы передачи, выдаваемые FPGA 200, преобразуются в аналоговые сигналы DAC (цифроаналоговым преобразователем) 211, пропускаются через T/R-переключатель 208 (переключатель передачи/приема), фильтруются фильтрами 210 и подаются в микроформирователь луча для матричного преобразователя.
В данном исполнении маломощный USB-микроконтроллер 204 используют для приема управляющей информации по шине USB, которая передается в FPGA 200. Эхо-сигналы, принятые и обработанные в FPGA 200, предпочтительно, включая демодуляцию и детектирование, вводятся в микроконтроллер 204 для обработки в формате USB для шины USB и сверхширокополосного приемопередатчика 96. Данные элементы, включая фильтры 210 реконструкции, T/R-переключатель 208, DAC 211 (на излучение), входную ASIC 206 (на прием), FPGA 200 контроллера и USB-микроконтроллер 204, составляют тракт ультразвукового сигнала между приемопередатчиком 96 и микроформирователем 72, 82 луча. Специалисту в данной области техники будут понятны различные другие элементы и регистры, показанные на фиг.7.
На фиг.8a и 8b показана компоновка конструкции беспроводного датчика 10 в соответствии с настоящим изобретением на видах в продольном и поперечном разрезах. Компоненты датчика в данном варианте осуществления расположены внутри корпуса 8a. Каркас внутри корпуса служит для монтажа и расположения компонентов, а также служит как теплоотвод для быстрого и равномерного отведения тепла, выделяемого внутри датчика. Электронные компоненты датчика смонтированы на монтажных платах 121, которые соединяются гибкими схемными соединениями 114. В данном примере монтажные платы и гибкие схемы формируют слитные автономные узлы для эффективного и компактного платного соединения и потока сигналов. Как можно видеть на фиг.8b, каждая из верхней и нижней частей электронного блока содержит две монтажных платы 112, сложенные параллельно одна другой и соединенные гибкой схемой 114. Как можно видеть, входная ASIC 206 и FPGA 200 контроллера смонтированы на нижней стороне нижней монтажной платы на чертежах. Верхние монтажные платы в датчике содержат смонтированные компоненты источника питания и набор 96 ИС приемопередатчика с антенной 76. В конкретном исполнении для набора 96 сверхширокополосных ИС, возможно, было бы желательно использовать отдельную монтажную плату, которая специально предназначена для высокочастотных компонентов и сигналов приемопередатчика. В показанном варианте осуществления пьезоэлектрический громкоговоритель 102 расположен на верхней монтажной плате. Гибкая схема 114 на дистальных концах продольно продолжающихся монтажных плат соединена с меньшей монтажной платой 112, на которой находятся микросхемы 72, 82 микроформирователя луча. Матрица 70, 80 преобразователей присоединена к микроформирователю пучка на дистальном конце 12 датчика.
В показанном узле батарея 92 заполняет центральное пространство датчика между монтажными платами. При применении показанной батареи, продолжающейся по длине, вес батареи распределяется вдоль большей части длины датчика, и улучшается равновесие датчика при манипулировании. Корпус можно изготавливать с отверстием, чтобы батарею 92 можно было достать для замены, или корпус может быть герметизированным, чтобы замена батареи была возможна только на предприятии. На проксимальном конце корпуса 8 датчика гибкой схемой 114 подсоединена небольшая монтажная плата 112, на которой смонтирован USB-разъем 120. Данный разъем может быть стандартным USB-разъемом типа A или типа B. В предпочтительном варианте осуществления USB-разъем выполнен, как показано на фиг.10a и 10b.
Облегченная компактная конструкция, показанная на фиг.8a и 8b, распределяет вес компонентов датчика следующим образом. Корпус 8 и его каркас, гибкие схемы 114, матрица 70, 80 преобразователей и микроформирователь 72, 82 луча весят около 50 грамм в представленной конструкции варианта осуществления. Компоненты модуля 94 сбора данных, набор 96 сверхширокополосных ИС, компоненты 90 источника и регулятора питания и монтажные платы для упомянутых компонентов и набора ИС весят около 40 грамм. Литиевая полимерная батарея на 1800 мА-час и разъем весят около 40 грамм. Громкоговоритель весит около пяти грамм, и антенна весит около десяти грамм. USB-разъем весит около трех грамм. Таким образом, общий вес данного беспроводного датчика приблизительно равен 150 граммам. При снижении веса, возможном для каркаса и собранных монтажных плат, можно достигнуть веса 130 грамм или менее. С другой стороны, батарея большей емкости для более длительного применения между подзарядками, матрица преобразователей с более широкой апертурой и/или корпус большего размера для более эффективного теплоотвода могут удвоить вес до приблизительно 300 грамм. Если батарея меньшей емкости может обеспечить сканирование в течение часа (одно исследование) до зарядки, то батарея большей емкости может допускать использование беспроводного датчика в течение всего дня (8 часов) и его укладку на подставку для ночной подзарядки. Некоторые специалисты по ультразвуковой эхографии могут потребовать как можно более легкий датчик, а другие предпочтут более тяжелый датчик с более продолжительным сканированием между подзарядками. В зависимости от сравнительной важности приведенных соображений для проектировщика и пользователя можно реализовать разные датчики разного веса.
В некоторых исполнениях, возможно, целесообразно создать беспроводной датчик, на котором отсутствуют физические элементы управления, как в случае большинства обычных ультразвуковых датчиков в настоящее время. Многие специалисты по ультразвуковой эхографии не желали бы присутствия элементов управления на датчике, так как, возможно, удерживать датчик одной рукой в положении для визуализации будет труднее, при одновременном манипулировании элементами управления на датчике другой рукой, то есть при работе со скрещенными руками. В других исполнениях на самом датчике находится только двухпозиционный переключатель, так что пользователь может убедиться, что неиспользуемый датчик выключен и не расходует батарею. В еще одних исполнениях на датчике представляется основная визуальная информация, например, уровень сигнала и остаточный ресурс батареи. Основная информация данного типа на датчике будет помогать осуществлению пользователем диагностического контроля датчика, который работает ненадлежащим образом. В еще одних отличающихся исполнениях, возможно, потребуется некоторый минимум элементов управления. Когда пользователь больше не привязан кабелем к хост-системе, системные элементы управления, обычно используемые для работы с датчиком, могут больше не находиться в пределах доступа, и минимум элементов управления на самом датчике может облегчать его независимую работу. На фиг.9a и 9b показаны два примера информационных дисплеев и элементов управления, которые могут находиться на корпусе беспроводного датчика. На фиг.9a показан набор дисплеев и элементов управления, ориентированных по вертикали и снабженных графическими обозначениями. На фиг.9b показан тот же самый набор дисплеев и элементов управления, ориентированных по горизонтали и снабженных текстовыми обозначениями. Индикатор 132 уровня сигнала отображается сверху слева, и индикатор 134 заряда батареи отображается сверху справа в каждом наборе дисплеев и элементов управления. В центре находится набор элементов управления, которые в данном примере содержат направленные вверх и вниз стрелки для настройки коэффициента усиления, выбора пункта меню или перемещения курсора, элемент управления стоп-кадром для фиксации кадра динамического отображения на экране, элемент управления сбором данных для сбора данных и сохранения зафиксированного изображения или кинопетли динамического изображения и элемент управления меню для вызова списка пунктов меню для датчика. В таком случае элементы управления со стрелками вверх и вниз используют для навигации по списку пунктов меню, и элемент 138 управления выбора используют для выбора требуемого пункта меню. Упомянутые элементы управления можно использовать для переключения режима работы датчика из B-режима в режим цветового картирования потока или, например, для установки линии вектора или M-линии на изображении. Элементы управления могут быть чувствительными к разным схемам активизации для управления несколькими функциями. Например, одновременное удерживание элементов управления меню и сбора данными в течение трех секунд можно применить для включения или выключения датчика, с устранением необходимости отдельного двухпозиционного переключателя. Трехкратное быстрое постукивание по элементу управления выбором может приводить к активизации элементов управления и/или вызывать обратную подсветку дисплея. Для активизации элементов управления желательна специальная последовательность, так как пользователь будет часто нажимать на элементы управления, когда держит беспроводной датчик и манипулирует им во время нормального сканирования, и желательно не допускать активизации элемента управления при нормальном манипулировании датчиком, когда активизация элемента управления не предполагается.
Возможность звуковой сигнализации громкоговорителем или зуммером 102 предпочтительно служит для дополнения отображения визуальной информации о беспроводном датчике и/или активизации элементов управления. Например, если заряд батареи снижается, то зуммер может издавать звук, чтобы предупредить пользователя о необходимости подзарядки батареи или использования другого датчика. Другой звук зуммера можно использовать, чтобы предупредить пользователя о состоянии низкого уровня сигнала, и пользователь может переместить хост-узел базовой станции ближе к месту исследования или следить за тем, чтобы не экранировать антенну рукой, как пояснялось ранее. Громкоговоритель или зуммер может издавать звук или вибрацию, когда активизируют элемент управления, что обеспечивает для пользователя сигнал обратной связи о том, что активизация имела место и зарегистрирована датчиком и/или системой.
Для дисплея беспроводного датчика и расположения элементов управления, показанных на фиг.9a и 9b, можно использовать различные технологии управления и отображения. Элементы управления могут быть простыми механическими контактными переключателями, покрытыми уплотняющей непроницаемой для жидкости мембраной с напечатанными на ней графическими символами. В более предпочтительном варианте дисплеи и элементы управления являются светодиодными (LED), жидкокристаллическими (LCD) или органическими светодиодными (OLED) дисплеями с сенсорной панелью, смонтированными на монтажной плате 112 заподлицо с внешней поверхностью корпуса 8 и герметично закрытыми непроницаемо для текучих сред относительно окружающего корпуса или наблюдаемыми через окно в корпусе. Тогда касание управляющего дисплея пальцем или специальной палочкой активизирует выбранную функцию управления сенсорной панели. Смотри публикацию международной заявки WO 2006/038182 (Chenal et al.) и патент США 6,579,237 (Knoblich).
Хотя основное преимущество беспроводного датчика в соответствии с настоящим изобретением состоит в исключении неудобного кабеля и привязке к ультразвуковой системе, существуют ситуации, в которых кабель датчика может быть желательным. Например, обычный способ подзарядки батареи беспроводного датчика состоит в укладке беспроводного датчика на зарядную подставку, когда датчик не применяется, как показано в патенте США 6,117,085 (Picatti et al.). Однако, возможно, в некоторых ситуациях было бы удобнее использовать кабель для подзарядки батареи. Кабель может быть более портативным, чем, например, зарядная подставка. Кроме того, кабель со стандартным разъемом может допускать подзарядку батареи датчика от множества различных распространенных устройств. В других ситуациях, если специалист по ультразвуковой эхографии проводит ультразвуковое исследование, и зуммер издает звук для сообщения о состоянии снижения заряда батареи, то специалист по ультразвуковой эхографии может пожелать продолжить использование датчика для проведения исследования и может пожелать переключиться с батарейного питания на питание по кабелю. В данной ситуации кабель питания был бы желателен, и подсистема 202 питания автоматически переключается на работу с кабелем питания, пока батарея подзаряжается. В еще одном примере радиочастотный или другой беспроводной канал связи с хост-узлом базовой станции может быть ненадежен, например, когда рядом работают с электрохирургическим оборудованием, или специалист по ультразвуковой эхографии вынужден держать датчик так, что антенна или другой передатчик на датчике экранирован(а) от хост-узла. В других ситуациях специалисту по ультразвуковой эхографии может потребоваться датчик, подсоединенный кабелем так, что датчик не будет разделен с системой или будет подвешен кабелем выше пола, при опускании подвески. Возможна ситуация, в которой кабель обеспечивает более высокие рабочие характеристики, например, более широкую полосу для передачи диагностических проверок или модернизированных версий микропрограммного или программного обеспечения датчика. В других обстоятельствах датчик не может успешно работать в паре с хост-системой, и будет работать только проводное соединение. В данных ситуациях может требоваться кабель для питания, передачи данных или для того и другого.
На фиг.10a показан кабель, пригодный для применения с беспроводным датчиком в соответствии с настоящим изобретением. Хотя для беспроводного датчика можно применять многожильные кабели и разъемы различных типов, в данном примере применен многожильный USB-кабель 300 с USB-разъемом 310 типа A на одном конце. От разъема 310 продолжается USB-адаптер 312 типа A. В альтернативном варианте можно использовать другие форматы USB, например, типов B и мини-B, которые используют на цифровых камерах, или можно использовать полностью специализированный разъем с другими требуемыми свойствами. USB-кабель можно вставлять фактически в любой настольный или носимый персональный компьютер, что допускает зарядку беспроводного датчика от фактически любого компьютера. Когда хост-система является ультразвуковой системой 50 типа носимого персонального компьютера, как показано на фиг.2b и 6a, кабель USB-типа можно применять для передачи сигналов как в хост-узел, так и из него, а также для питания.
Такую же модель USB-разъема можно обеспечить на другом конце кабеля 300 для подсоединения к беспроводному датчику, причем в данном случае беспроводной датчик содержит ответный USB-разъем. Разъем датчика может быть заглубленным внутрь корпуса и закрываться водонепроницаемой крышкой или другим непроницаемым для жидкости, съемным уплотнением, когда не используется. В показанном примере разъем 302 к датчику содержит четыре проводника USB 308. Проводники 308 подпружинены и потому будут прижиматься с хорошим контактом к ответным проводникам на беспроводном датчике. Проводники 308 расположены на углубленной или выступающей торцевой детали 304 разъема, которая снабжена ориентирующим элементом на одной стороне 306 для создания необходимости стыковки с датчиком только в одной ориентации.
Сопрягаемый беспроводной датчик 10 для кабеля, показанного на фиг.10a, представлен на фиг.10b. Разъем 310 датчика в данном примере находится на проксимальном конце 14 и полностью герметизирован. Контакты 314 соединителя 310 на стороне датчика находятся на углубленном или выступающем участке 316, который сопрягается с выступающей или углубленной торцевой деталью 304 кабеля и аналогично снабжен ориентирующим элементом 312 для надлежащего соединения. Когда кабельный разъем 302 вставляют в сопрягающийся участок 316 датчика, подпружиненные проводники 308 кабеля упираются в контакты 314 датчика на датчике и, тем самым, замыкают соединение USB с датчиком.
В соответствии с принципами дополнительного аспекта датчика и кабеля, показанных на фиг.10a и 10b, сопрягающийся участок 316 датчика не выступает или не заглублен, но расположен на одном уровне с окружающей поверхностью датчика. Сопрягающийся участок 316 выполнен из магнитного материала или черного металла, который окружает контакты 314 и обладает магнитным притяжением. Сопрягающаяся торцевая деталь 304 кабельного разъема 302 аналогично не обязательно должна быть выступающей или углубленной, но также может находиться на одном уровне с торцом разъема 302 и быть изготовленной из намагниченного материала, который притягивается к сопрягающемуся участку 316 датчика. Намагниченный материал торцевой детали 304 может быть постоянно намагничен или электрически намагничиваться так, что намагничивание можно включать и выключать. Следовательно, кабель соединяется с датчиком не физически сцепляющимся разъемом, а силой магнитного притяжения, которая может обеспечивать как ориентирование (по полярности), так и самоустановку. Это обеспечивает несколько преимуществ для беспроводного датчика. Одно преимущество состоит в том, что разъем 310 датчика не должен содержать выступов и углублений, которые могут захватывать гель и другие загрязняющие вещества, которые трудно счищать и удалять. Разъем 310 может быть плавно продолжающейся поверхностью корпуса 8 датчика, сопрягающегося участка 316 и контактов 314, которая легко очищается и не захватывает загрязняющие вещества. Таким же преимуществом обладает кабельный соединитель 302. Магнитное, а не физическое соединение подразумевает, что соединение можно физически разорвать без повреждения датчика. Специалист по ультразвуковой эхографии, который привык к применению беспроводного датчика, может привыкнуть к отсутствию кабеля и может забыть, что кабель 300 присутствует при сканировании. Если специалист по ультразвуковой эхографии подвергает кабель напряжению, например, при сталкивании с ним или зацеплении за него, то усилие преодолеет силу магнитного притяжения, соединяющую кабель с датчиком, и кабель 300 оторвется без ущерба от датчика 10, без его повреждения. В предпочтительном варианте сила магнитного притяжения является достаточно большой для удерживания веса и момента датчика при свисании с кабеля, чему способствуют не более чем 300-граммовый вес беспроводного датчика. Таким образом, если подсоединенный кабелем датчик падает с диагностического стола, то он повиснет на магните кабеля и не упадет свободно и не разобьется об пол, что спасает беспроводной датчик от повреждения.
Следует понимать, что кабель может быть двухкомпонентным устройством, с адаптером, разъемно соединяющимся с датчиком и имеющим стандартизованный разъем под кабель. Адаптер соединяется с кабелем стандартизованным разъемом, например, USB-разъемом на обоих концах. В данной конфигурации адаптер можно использовать с любым стандартизованным кабелем требуемой длины.
Как с другими устройствами с батарейным питанием энергопотребление имеет особое значение для беспроводного датчика в соответствии с настоящим изобретением. Что касается беспроводного датчика, для этого есть две причины. Во-первых, от беспроводного датчика требуется способность формировать изображения в течение продолжительного периода времени до того, как потребуется подзарядка. Во-вторых, нагревание представляет проблему в отношении безопасности пациента и срока службы компонентов, и желательно небольшое повышение температуры около матрицы преобразователей, так и внутри корпуса 8 датчика. Для снижения энергопотребления и улучшения тепловых характеристик беспроводного датчика можно принимать несколько мер. Одна из них заключается в том, что всякий раз, когда к датчику подсоединен кабель для зарядки, как пояснялось выше в связи с фиг.10a и 10b, датчик следует переключать на использование напряжения питания кабеля для работы датчика. Хотя при этом батарея может заряжаться, желательно, чтобы мощность батареи не использовалась для питания датчика, когда подсоединен кабель для зарядки. Другой мерой, которую можно принять, является переключение беспроводного датчика в режим пониженного энергопотребления, когда датчик не используют для визуализации. Смотри патент США 6,527,719 (Olsson et al.) и публикацию международной заявки WO 2005/054259 (Poland). Можно применить несколько методов для автоматического определения состояния, когда датчик не используют для визуализации. Один состоит в обнаружении отражения от границы раздела линза-воздух перед матрицей преобразователей, когда акустическое окно датчика не находится в контакте с пациентом. Смотри патент 5,517,994 (Burke et al.) и патент США 65,654,509 (Miele et al.). Если упомянутый сильный отраженный сигнал сохраняется в течение предварительно заданного количества секунд или минут, то датчик может предположить, что его не используют для визуализации, и переключиться в режим с пониженным энергопотреблением. Другой метод заключается в периодическом выполнении доплеровского сканирования, даже если режим не является доплеровским, чтобы понять, обнаруживается ли движение кровотока, которое является свидетельством, что датчик используют. Для обнаружения движения можно использовать отслеживание спеклов и другие методы обработки изображения. Еще один подход состоит в установке, по меньшей мере, одного акселерометра внутри корпуса 8 датчика. Смотри патент 5,529,070 (Augustine et al.). Сигналы акселерометра периодически замеряются, и если предварительно заданный период времени проходит без изменения сигнала ускорения, то датчик может предположить, что пользователь не манипулирует датчиком, и переключиться в режим с пониженным энергопотреблением. Кроме автоматических переключений по интервалам простоя в режим с пониженным энергопотреблением, предусмотрены элементы управления, посредством которых пользователь может вручную переключать датчик в режим с пониженным энергопотреблением. Сочетание двух данных возможностей служит тому, чтобы пользователь мог устанавливать меньшие длительности интервалов простоя для переключения в режим с пониженным энергопотреблением. Это может также выполняться косвенно системой. Например, пользователь может устанавливать остающийся период времени, в течение которого пользователь хотел бы осуществлять визуализацию беспроводным датчиком. В ответ на очень длинный необходимый период сканирования датчик реагирует автоматической активизацией изменений параметров, например интервалов простоя, и излучаемых пучков, которые предназначены для обеспечения более продолжительной визуализации.
Как показано на фиг.7, модуль 94 сбора данных принимает сигнал от термистора вблизи сборки преобразователей датчика, а также использует термометр 212 внутри корпуса, чтобы измерять тепло, выделяемое другими компонентами датчика. Когда любое из данных термочувствительных устройств будет показывать запредельный тепловой режим, датчик будет переключаться в режим с низким потреблением мощности. Чтобы обеспечить режим работы с низким потреблением мощности, можно изменить несколько параметров. Мощность, излучаемую матрицей преобразователей, можно снизить уменьшением ±30-Вольтового напряжения питания, возбуждающего матрицу преобразователей. Хотя такая мера ослабит тепловыделение, она может также отрицательно сказаться на глубине зондирования и четкости формируемого изображения. Компенсацию данного изменения можно обеспечить автоматическим повышением усиления, применяемого к принятым сигналам, в хост-системе. Другой способ снижения тепловыделения состоит в снижении тактовой частоты цифровых компонентов в датчике. Смотри патент США 5,142,684 (Perry et al.). Еще один способ снижения тепловыделения и экономии мощности состоит в изменении параметров визуализации. Можно снижать частоту кадров сбора данных, что уменьшает величину излучаемой энергии в единицу времени. Можно увеличивать разнесение смежных излучаемых пучков, в результате чего формируется изображение с меньшим разрешением, которое можно, при необходимости, улучшить другими способами, например, интерполяцией промежуточных акустических линий. Другой способ состоит в изменении коэффициента заполнения кадра. Дополнительной мерой является уменьшение активной излучающей апертуры, приемной апертуры или обеих апертур, что сокращает число элементов-преобразователей, которые подлежат обслуживанию активными цепями. Например, если во время биопсии или другой инвазивной процедуры визуализируется игла, апертуру можно уменьшить, так как для ультразвуковой визуализации большинства игл не требуется высокого разрешения. Другой способ состоит в снижении мощности радиочастотной передачи, предпочтительно, с выдачей пользователю сообщения, предлагающего пользователю уменьшить расстояние между беспроводным датчиком и хост-системой, по возможности, чтобы можно было продолжить формирование высококачественных изображений, при сниженной мощности радиочастотной передачи. Снижение мощности радиочастотной передачи (либо акустической, либо связи) предпочтительно сопровождается повышением усиления, применяемого хост-системой к принятым радиочастотным сигналам.
Проблема, возникающая с беспроводным датчиком, состоит в том, что упомянутый датчик может отделяться от его ультразвуковой хост-системы и может быть легче утерян или украден, чем обычный кабельный датчик. На фиг.11 показано решение данной проблемы, которое заключается в использовании радиочастотного поля, излучаемого беспроводным датчиком 10 и/или его хост-системой 40, для определения местоположения или отслеживания беспроводного датчика. На фиг.11 показан кабинет 300 для исследований, в котором находится диагностический стол 312 для исследования пациентов беспроводным датчиком 10. Диагностические изображения наблюдаются на экране дисплея ультразвуковой хост-системы 40, наблюдаемой на виде сверху. На чертеже показаны две схемы 320 и 322 радиочастотной зоны действия с беспроводным датчиком 10 в центре упомянутых зон. Внутренняя зона 320 действия является предпочтительной зоной действия беспроводного датчика 10 и его хост-системы 40. Когда беспроводной датчик и его хост-система находятся в пределах радиуса данной зоны действия, прием будет на уровне мощности, обеспечивающей надежное управление датчиком и диагностические изображения с низким уровнем шумов. Когда беспроводной датчик и его хост-система находятся в пределах данной зоны действия, индикатор 132 уровня сигнала будет показывать максимальный или почти максимальный уровень. Однако если беспроводной датчик и его хост-система разнесены на расстояние, превышающее радиус данной зоны, например, выходящее за предпочтительную зону 320 действия, но в пределах максимальной зоны 322 действия, то работа беспроводного датчика может стать ненадежной, и высококачественные динамические изображения, возможно, не будут уверенно приниматься хост-узлом. В данных условиях индикатор 132 уровня сигнала начнет показывать низкий или недостаточный уровень сигнала, и звуковой предупредительный сигнал, возможно, будет выдаваться зуммером 102 датчика или звуковым и/или визуальным индикатором хост-системы.
Упомянутую возможность обнаружения, когда беспроводной датчик находится в пределах зоны действия хост-системы, можно использовать для различных целей. Например, план медицинского учреждения может предполагать, что беспроводной датчик 10 должен находиться в кабинете 300 для исследований и не должен переноситься в любой другой кабинет. В таком случае, если кто-то попробует выйти за дверь 302 с беспроводным датчиком 10, то индикатор уровня сигнала или синхронизации (удаления) будет обнаруживать данное перемещение, и датчик и/или хост-система могут издавать звуковой сигнал или передавать предупредительный сигнал, указывающий, что беспроводной датчик выносят из его санкционированной зоны. Упомянутый перенос может быть ненамеренным. Например, беспроводной датчик 10 может оставаться на матраце диагностического стола 312. Персонал, назначенный для уборки и замены матраца, может не заметить беспроводной датчик, и датчик может оказаться завернутым в матрац для отправки в прачечную или мусоросжигатель. Если такое случается, то датчик может издавать свой звуковой предупредительный сигнал, когда его выносят за дверь 302 и за пределы зоны действия его хост-системы 40 и, тем самым, предупреждать персонал учреждения о присутствии беспроводного датчика в матраце.
Эта же самая возможность может препятствовать выносу беспроводного датчика из учреждения. Например, если кто-то попытается вынести датчик за дверь 302, вдоль по коридору 304 и через выход 306 или 308 из здания, то передатчик или приемник 310 с сигнализатором может обнаружить, когда беспроводной датчик находится в пределах сигнальной зоны 324 упомянутого детектора 310. Когда датчик 10 пересекает сигнальную зону 324, может включиться зуммер 102 датчика и зазвучать сигнализация детектора 310, чтобы предупредить персонал учреждения о попытке выноса беспроводного датчика. Система детектора 310 может также регистрировать время и место предупредительного сигнала, чтобы учитывать несанкционированное перемещение датчика.
Зуммер или громкоговоритель 102, встроенный в датчик, может также служить для определения местоположения потерянного датчика. Беспроводным способом передается сигнал команды, который предписывает беспроводному датчику издать свой собственный слышимый тональный сигнал. В предпочтительном варианте передатчик обладает расширенной зоной действия, которая охватывает все пространство, в которой может находиться беспроводной датчик. После приема команды беспроводной датчик издает звук, который предупреждает лиц, находящихся вблизи места нахождения датчика. Датчик, который положен не на место или покрыт матрацем, можно легко найти данным методом. Этот же самый метод можно применить, чтобы в больнице можно было обнаружить конкретный датчик, когда нуждающийся в нем врач не может найти его.
На фиг.12 и 13 показано несколько приспособлений, которые можно эффективно применять с беспроводным датчиком в соответствии с настоящим изобретением. На фиг.12 показаны видеоочки, которые можно применять в качестве головного дисплея вместе с беспроводным датчиком в соответствии с настоящим изобретением. Головной дисплей особенно желателен, когда беспроводной датчик используют во время хирургической операции. Беспроводной датчик желателен для визуализации в хирургии благодаря отсутствию кабеля, который иначе создавал бы помехи в операционном поле, нуждался в тщательной стерилизации и, возможно, затруднял хирургическую операцию. Беспроводной датчик идеален для избавления пациента и хирурга от опасностей, связанных с кабелем. Кроме того, в хирургии головной дисплей часто используют для отображения как основных показателей состояния организма пациента, так и ультразвукового изображения. Таким образом, хост-система может располагаться вне области проведения процедуры с представлением ее ультразвукового изображения на головном дисплее. Перед выполнением разреза хирург может использовать ультразвук для рассмотрения анатомии под местом разреза. Для этого требуется, чтобы хирург смотрел вниз на операционное поле, затем вверх на ультразвуковой дисплей в ходе неудобной и разрывной последовательности процедур. Головной дисплей 410, показанный на фиг.12, избавляет от данного дискомфорта и отвлечения внимания. Дисплей 410 содержит небольшой проектор 412, который проецирует ультразвуковое изображение на поверхность, например, экрана ЖК-дисплея или в приведенном примере линзы видеоочков 414, что позволяет хирургу смотреть на операционное поле и при этом лишь немного поворачивать глаза, чтобы наблюдать ультразвуковое изображение анатомии пациента. Проектор 412 можно снабдить его собственными видеоочками или можно пристегивать к собственным очкам хирурга. Проектор 412 может быть подсоединен проводами к хост-системе, но, предпочтительно, связан с хост-системой по беспроводной технологии, чтобы провод от проектора не требовался и не создавал помех в операционном поле. Данное изображение не обязательно должно иметь высокую частоту кадров для отображения в реальном времени, так как хирургу потребуется наблюдать относительно неподвижное ультразвуковое изображение, связанное с операционным полем. Следовательно, требования к ширине полосы частот для связи с проектором 412 могут быть относительно низкими. В альтернативном варианте FPGA 200 блока сбора данных можно запрограммировать для выполнения преобразования в другой стандарт развертки, и изображение, преобразованное в другой стандарт развертки, можно передавать непосредственно из беспроводного датчика в беспроводной головной дисплей. Аналогичный ультразвуковой дисплей можно снабдить панорамными защитными очками, но поскольку это мешало бы хирургу легко наблюдать операционное поле во время наблюдения ультразвукового изображения, то предпочтителен метод визуализации, который позволяет наблюдать то и другое одновременно или в быстрой последовательности.
Для таких процедур, как вышеописанная хирургическая операция, в процессе которой хирург манипулирует хирургическими инструментами в операционном поле и не может таким же образом манипулировать органами управления ультразвуковой диагностикой для визуализации, предпочтительно голосовое управление беспроводным датчиком. На фиг.13 показан радиотелефонный приемопередатчик 420 стандарта Bluetooth, который одевается на ухо пользователя и содержит микрофон 422, посредством которого пользователь может выдавать голосовые команды в беспроводной датчик. Данный приемопередатчик голоса можно применять с хост-узлом базовой станции, например, ультразвуковой системой iU22, выпускаемой компанией Philips Medical Systems, Andover, MA, которая содержит встроенную возможность обработки для распознавания голоса. Пользователь может использовать беспроводной радиотелефонный приемопередатчик 420, чтобы выдавать голосовые команды для управления работой ультразвуковой системой iU22. В соответствии с принципами настоящего изобретения, ультразвуковая система с возможностью распознавания голоса содержит также приемопередатчик для связи с беспроводным датчиком. Данная ультразвуковая хост-система может принимать голосовые команды от пользователя либо через проводной микрофон, либо беспроводным способом, с использованием беспроводной головной гарнитуры, например гарнитуры, показанной на фиг.13, и путем распознавания голоса преобразовывать голосовые команды в сигналы команд для беспроводного датчика. Затем сигналы команд передаются беспроводным способом в беспроводной датчик для выполнения предписанного командой действия. Например, пользователь может изменять глубину отображаемого изображения выдачей команды «Deeper» («глубже») или «Shallower» («ближе к поверхности»), и хост-система и беспроводной датчик будут реагировать изменением глубины ультразвукового изображения. В конкретном варианте осуществления, возможно, желательно посылать голосовую информацию пользователю для указания, что предписанное командой действие выполнено. В продолжение вышеприведенного примера хост-система может отвечать аудиоинформацией из синтезатора голоса и громкоговорителя о том, что «Depth changed to ten centimeters» («Глубина изменилась на десять сантиметров»). Смотри, например, патент США 5,970,457 (Brant et al.). Беспроводной приемопередатчик, показанный на фиг.13, содержит наушник 424, который пользователь может носить в ухе, чтобы звуковые ответы на голосовые команды пересылались непосредственно в ухо пользователя, что улучшает понимание в условиях высокого уровня окружающих шумов.
Возможность обработки для распознавания голоса может быть встроена в беспроводной датчик, чтобы пользователь мог передавать команды прямо в беспроводной датчик, без их прохождения через хост-систему. Однако возможность обработки для распознавания голоса нуждается в подходящем программном обеспечении и аппаратных средствах и, что существенно, ставит проблему дополнительной потребной мощности в отношении датчика с батарейным питанием. По данным причинам возможность обработки для распознавания голоса целесообразно размещать в хост-системе, в которой питание для упомянутой возможности несложно получать от сетевого напряжения. Тогда интерпретированные команды легко передаются в беспроводной датчик для исполнения. В вышеописанных прикладных задачах, когда пользователь предпочитает датчик без каких-либо пользовательских интерфейсных устройств на беспроводном датчике, голосовое управление обеспечивает подходящее средство для управления беспроводным датчиком.
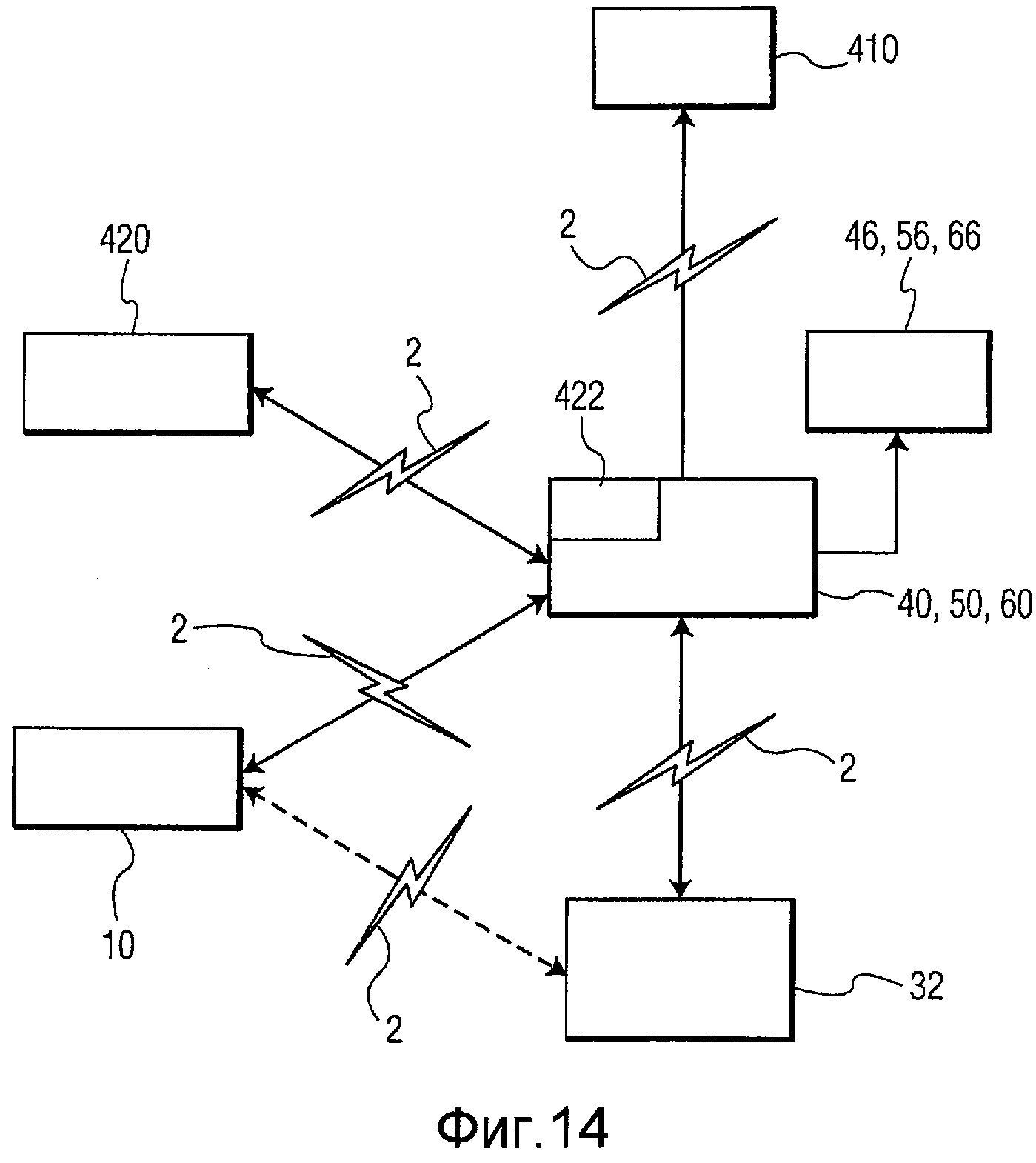
На фиг.14 показана полностью интегрированная беспроводная ультразвуковая система, выполненная в соответствии с принципами настоящего изобретения. В центре системы находится хост-система 40, 50, 60, которая запрограммирована для работы в паре с несколькими беспроводными устройствами ультразвуковой визуализации и приспособлениями. (Символ, обозначенный позицией 2, показывает беспроводную линию связи). Основным элементом является беспроводной датчик 10, который реагирует на сигналы команд и передает данные изображения в хост-систему 40, 50, 60. Хост-система отображает ультразвуковое изображение на своем системном дисплее 46, 56, 66. В качестве альтернативы или дополнительно, изображение пересылается в головной дисплей 410, в котором ультразвуковое изображение отображается для более удобного применения пользователем. Беспроводной датчик 10 действует с управлением от пользовательского интерфейса, расположенного на самом датчике, как показано на фиг.9a и 9b. В качестве альтернативы или дополнительно, элементы управления беспроводным датчиком могут находиться на хост-системе 40, 50, 60. Еще одним альтернативным вариантом является применение беспроводного пользовательского интерфейса 32, который передает управляющие команды непосредственно в беспроводной датчик 10 или в хост-систему для трансляции в беспроводной датчик. Другим альтернативным вариантом является педальное управление. Еще одним дополнительным вариантом является голосовое управление датчика словами, произносимыми в микрофон 420. Данные командные слова передаются в хост-систему 40, 50, 60, в которой они распознаются и преобразуются в сигналы команд для датчика. Затем сигналы команд передаются беспроводным способом в датчик 10 для управления работой беспроводного датчика.
Реферат
Изобретение относится к медицинской технике, а именно к медицинским диагностическим ультразвуковым системам. Датчик содержит матричный преобразователь, соединенную с ним схему формирователя луча, контроллер сбора данных, приемопередатчик, чувствительный к, по меньшей мере, частично сфокусированным формирователем луча эхо-сигналам, который выполняет функцию беспроводной передачи информационных сигналов изображения в хост-систему, схему питания и батарею, соединенную со схемой питания. Матричный преобразователь, схема формирователя луча, контроллер сбора данных, приемопередатчик, схема питания и батарея вмещены внутрь корпуса датчика, и суммарный вес корпуса датчика и вмещенных компонентов не превышает 300 грамм. Хост-система дополнительно содержит дисплей, который отображает изображения, передаваемые беспроводным образом упомянутым приемопередатчиком датчика в хост-систему. Использование изобретения позволяет упростить беспроводную передачу изображений в удаленную хост-систему во время хирургической процедуры. 19 з.п. ф-лы, 14 ил.
Формула
матричный преобразователь;
схему формирователя луча, соединенную с матричным преобразователем;
контроллер сбора данных, соединенный с формирователем луча;
приемопередатчик, чувствительный к, по меньшей мере, частично сфокусированным формирователем луча эхо-сигналам, который выполняет функцию беспроводной передачи информационных сигналов изображения в хост-систему;
схему питания, которая функционирует для подачи напряжения возбуждения в матричный преобразователь, схему формирователя луча, контроллер сбора данных и беспроводной приемопередатчик; и
батарею, соединенную со схемой питания,
причем матричный преобразователь, схема формирователя луча, контроллер сбора данных, приемопередатчик, схема питания и батарея вмещены внутрь корпуса датчика, и суммарный вес корпуса датчика и вмещенных компонентов не превышает 300 г,
при этом хост-система дополнительно содержит дисплей (46), который отображает изображения, передаваемые беспроводным образом упомянутым приемопередатчиком датчика в хост-систему.
Комментарии