Система направления и катетерная система - RU2555381C2
Код документа: RU2555381C2
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к системе направления, содержащей два радиально противоположно расположенных приводных шкива для направления трубчатого объекта, расположенного между приводными шкивами.
Изобретение относится также к катетерной системе, содержащей данную систему направления.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Вариант осуществления подобной системы направления, а именно катетерной системы, описан в патентной заявке США 2004/0254566 А1. Известная система содержит устройство, содержащее два ролика, расположенных параллельно между собой и ортогонально катетеру, который захватывается между данными роликами. По меньшей мере, один из роликов можно приводить во вращение, и, по меньшей мере, один из упомянутых роликов упруго прижат к другому ролику для обеспечения фрикционного зажима вставленного катетера. В результате вращения ролика в направлении по часовой стрелке или против часовой стрелки катетер продольно перемещается соответственно вперед или назад. По меньшей мере, один из двух роликов можно также перемещать аксиально в обоих его аксиальных направлениях таким образом, что в результате данного аксиального перемещения катетер, захваченный между роликами, вращается вправо или влево относительно своей оси. Использование одной пары роликов, которые находятся в зацеплении с катетером, приводит как к продольному перемещению катетера вперед и назад, так и к его вращению вправо или влево, возможно, одновременно с упомянутым продольным перемещением.
В известном устройстве вращение катетера связано с перемещениями катетера вдоль осей роликов. Недостаток известного устройства состоит в том, что число вращений катетера ограничено осевым размером роликов. В частности, если катетер непрерывно вращают, то катетер выйдет из контакта с роликами в некоторый момент, в результате его смещения вдоль осей роликов, и не будет захватываться роликами. После того как происходит выход из контакта, перемещение катетера больше не поддается управлению роликами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание улучшенной системы направления, которая позволяет непрерывно вращать трубчатый объект без опасности, что трубчатый объект выйдет из контакта с роликами.
Данная цель достигается с помощью системы направления по п. 1 формулы изобретения. Система направления содержит два радиально противоположных приводных шкива для направления трубчатого объекта, например катетера, расположенного между приводными шкивами. Следует отметить, что термин «направление трубчатого объекта» включает в себя ориентирование и/или продвижение трубчатого объекта. Приводные шкивы имеют, каждый, ось вращения шкива и содержат, каждый, множество роликов, распределенных вокруг оси вращения шкива. Ролики расположены с возможностью вращения. Каждый ролик имеет ось вращения ролика и внешнюю приводную поверхность с вогнутым изгибом в направлении, соответствующем оси вращения ролика. Ось вращения ролика ориентирована наклонно относительно оси вращения шкива. Ролики каждого приводного шкива формируют совместно направляющую периферию для трубчатого объекта. В данной системе направления вращение трубчатого объекта не приводит к перемещению трубчатого объекта вдоль оси вращения ролика. Данная конструкция приводных шкивов и роликов обеспечивает то, что трубчатый объект остается захваченным роликами шкивов, независимо от количества вращения, благодаря внешней приводной поверхности ролика, которая имеет вогнутый изгиб в направлении, соответствующем оси вращения ролика. В заключение система направления в соответствии с изобретением не имеет вышеупомянутой проблемы известного устройства.
Вариант осуществления системы направления в соответствии изобретением отличается тем, что система направления содержит электродвигательное устройство для приведения в движение приводных шкивов.
Направление трубчатого объекта с помощью системы направления в соответствии с изобретением выполняется согласно приведенному далее описанию. Трубчатый объект перемещается в первом аксиальном направлении, когда электродвигатель направляет один из приводных шкивов, называемый далее первым шкивом, против часовой стрелки и другой приводной шкив, называемый далее вторым шкивом, по часовой стрелке. Трубчатый объект перемещается во втором осевом направлении, когда электродвигатель направляет первый шкив по часовой стрелке и второй шкив против часовой стрелки. Трубчатый объект вращается в первом направлении вращения, когда электродвигатель направляет первый шкив по часовой стрелке и второй шкив по часовой стрелке. Трубчатый объект вращается во втором направлении вращения, противоположном первому направлению вращения, когда электродвигатель направляет первый шкив против часовой стрелки и второй шкив против часовой стрелки.
Практический вариант осуществления системы направления в соответствии с изобретением отличается тем, что каждый приводной шкив содержит два бортика шкива, проходящих вокруг оси вращения. Ролики установлены между двумя бортиками шкива.
Практический вариант осуществления системы направления в соответствии с изобретением отличается тем, что оси вращения шкивов расположены, по существу, параллельно между собой.
Практический вариант осуществления системы направления в соответствии с изобретением отличается тем, что ось вращения ролика образует угол от 10 до 80 градусов с осью вращения шкива. В предпочтительном варианте угол от 30 до 60 градусов допускает надежный захват трубчатого объекта роликами.
Предпочтительный вариант осуществления системы направления в соответствии с изобретением отличается тем, что ось вращения ролика образует угол, по существу, 45 градусов с осью вращения шкива. Данный угол обеспечивает наилучший захват трубчатого объекта роликами.
Вариант осуществления системы направления в соответствии с изобретением отличается тем, что приводные шкивы допускают перемещение между первым положением, в котором приводные шкивы расположены вплотную один к другому для привода в движение трубчатого объекта, и вторым положением, в котором приводные шкивы удалены один от другого для вставления и/или съема трубчатого объекта.
Данный отличительный признак обеспечивает пользователю системы направления возможность отделять трубчатый объект от системы и продолжать направление трубчатого объекта вручную.
Вариант осуществления системы направления в соответствии с изобретением отличается тем, что система направления содержит устройство управления приводными шкивами для перемещения приводных шкивов между первым положением и вторым положением.
Система направления в соответствии с изобретением применима для многих различных прикладных задач, например направления катетера или проволочного проводника, направления неинвазивного хирургического или исследовательского инструмента и направления ультразвукового датчика в теле человека или животного.
Целью настоящего изобретения является также создание катетерной системы. Катетерная система в соответствии с изобретением содержит катетер и систему направления в соответствии с изобретением. Катетер образует трубчатый объект, и система направления сконфигурирована с возможностью направления катетера.
Вариант осуществления катетерной системы в соответствии с изобретением отличается тем, что катетер содержит наконечник, и тем, что катетерная система содержит приводной блок для манипуляции наконечником. Приводной блок может быть любым приводным блоком, известным в технике, и может применяться пользователем катетерной системы для выполнения требуемой операции на теле, в частности, теле человека или животного, после того как наконечник приведен в требуемое положение внутри тела.
Вариант осуществления катетерной системы в соответствии с изобретением отличается тем, что катетерная система содержит устройство управления электродвигателем для управления электродвигательным устройством системы направления.
Устройство управления электродвигателем может быть известным в технике микропроцессорным блоком, снабженным подходящим программным обеспечением для управления системой направления. Управление микропроцессорным блоком может осуществляться пользователем с пульта управления с командными кнопками. Посредством нажатия соответствующей кнопки пользователь может задать поступательное перемещение трубчатого объекта в одном из двух аксиальных направлений и/или вращение трубчатого объекта в одном из двух направлений вращения. Соответственно, во время использования электродвигательное устройство получает команду управления из микропроцессора и управляет шкивами системы направления таким образом, что обеспечивается заданное поступательное перемещение и/или вращение трубчатого объекта.
Вариант осуществления катетерной системы в соответствии с изобретением отличается тем, что катетерная система содержит средство слежения для определения положения и/или ориентации наконечника в теле и устройство отображения для отображения положения и/или ориентации наконечника, определенных средством слежения.
Во время операции пользователь катетерной системы наблюдает положение и/или ориентацию наконечника и манипулирует наконечником катетера с помощью приводного блока для манипуляции наконечником в соответствии с требуемой операцией.
Вариант осуществления катетерной системы в соответствии с изобретением отличается тем, что шкивы системы направления выполнены в виде блока одноразового использования, а приводные электродвигатели формируют узел многократного использования. Данное исполнение способствует возможности очистки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение и дополнительные аспекты изобретения описаны для примера и поясняются в дальнейшем с помощью следующих фигур:
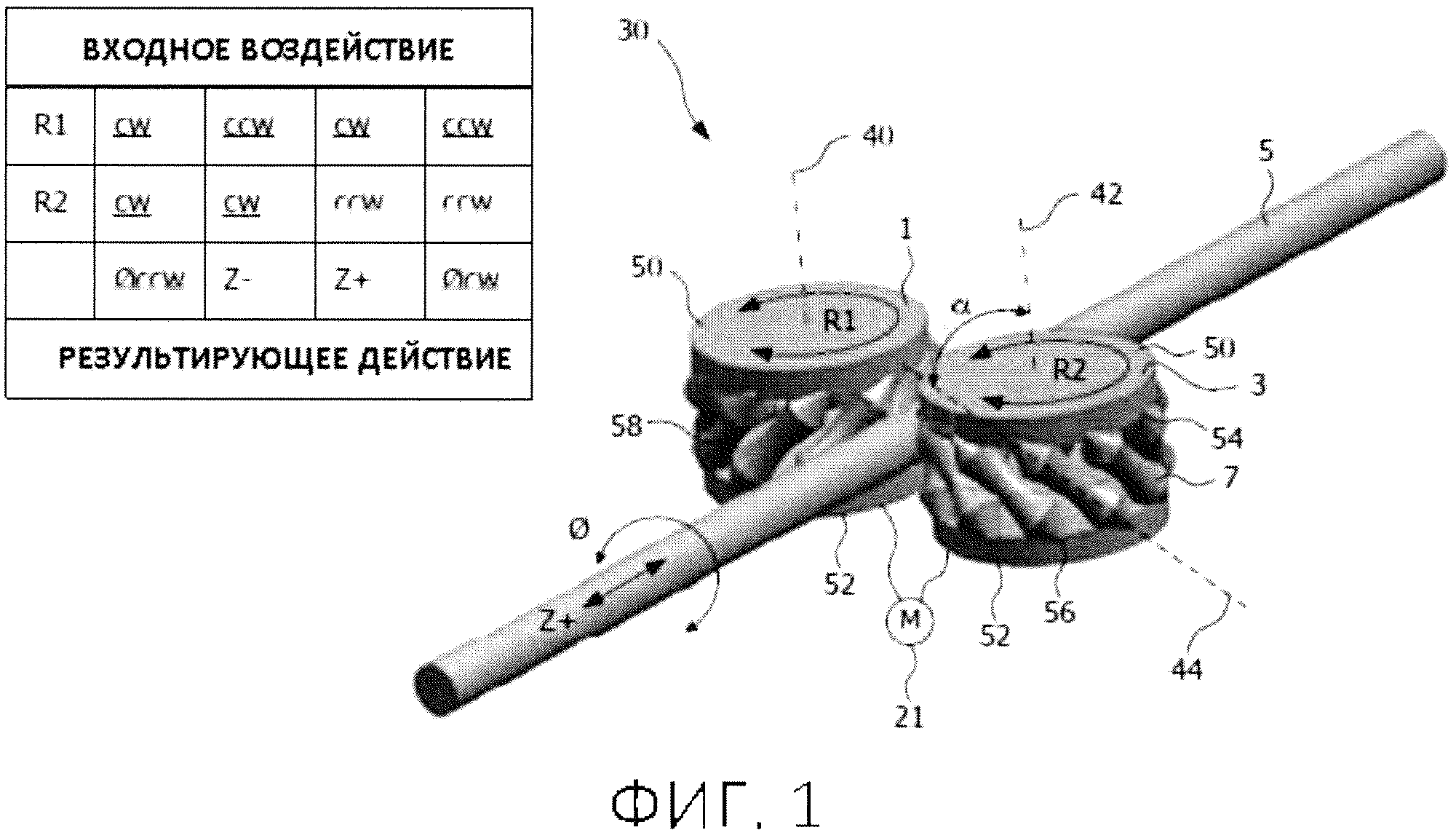
фиг. 1 - схематическое изображение примерного варианта осуществления системы направления в соответствии с изобретением;
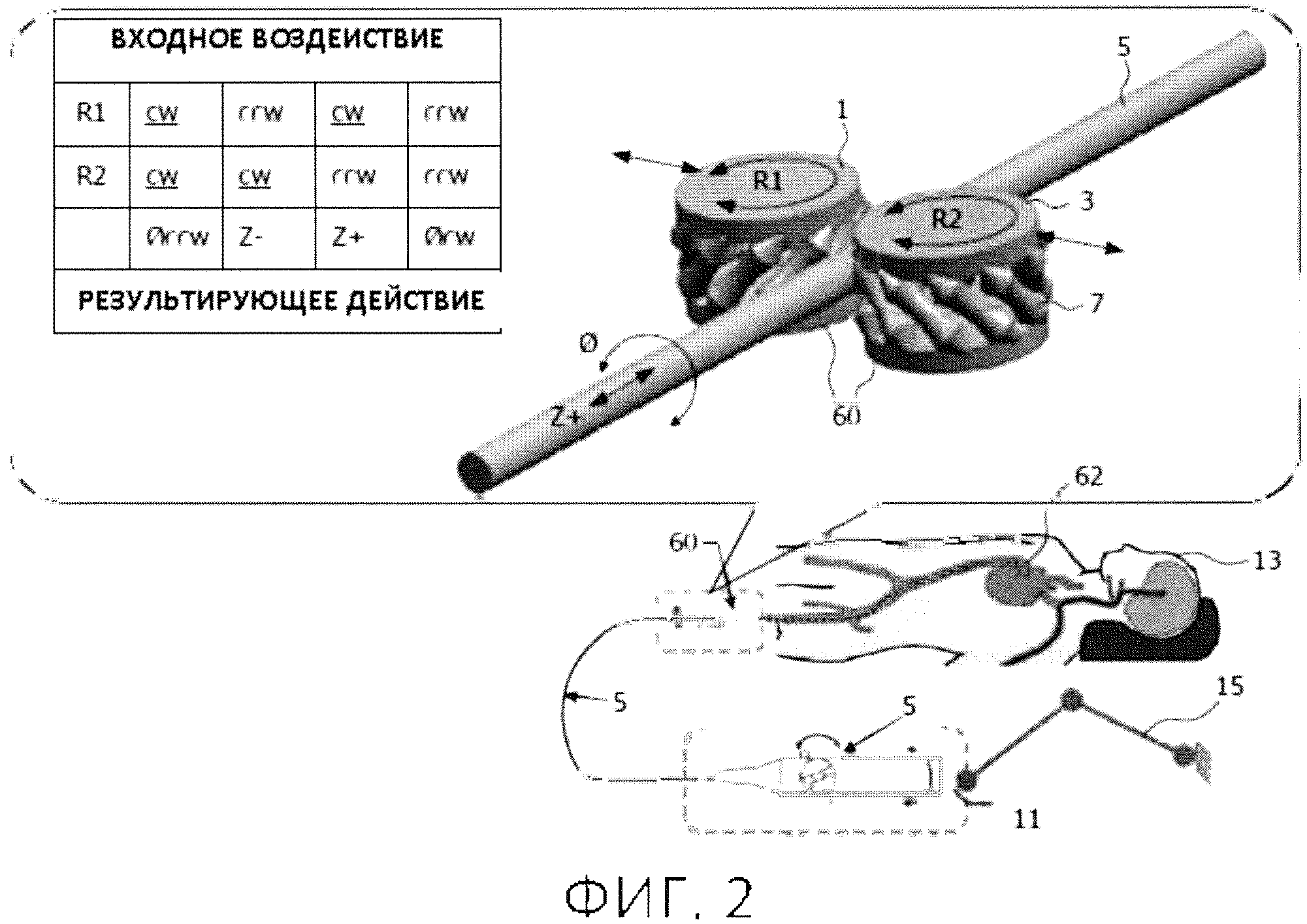
фиг. 2 - схематическое изображение первого примерного варианта осуществления катетерной системы в соответствии с изобретением и положения системы направления внутри катетерной системы;
фиг. 3 - схематическое изображение первого примерного варианта осуществления катетерной системы в соответствии с изобретением, положения системы направления внутри катетерной системы и возможного положения системы направления относительно пациента;
фиг. 4 - схематическое изображение второго примерного варианта осуществления катетерной системы в соответствии с изобретением, при этом показано устройство отображения, показывающее положение наконечника катетера.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В последующем описании предпочтительных вариантов осуществления упоминаются прилагаемые чертежи, которые составляют часть описания. Конкретные варианты осуществления, в форме которых можно практически выполнить изобретение, приведены в нижеследующем описании для пояснения. Следует также понимать, что применимы другие варианты осуществления, и можно вносить конструктивные изменения, не выходящие за пределы объема настоящего изобретения. Следует отметить, что одинаковые позиции служат для обозначения одинаковых или подобных частей в нескольких вариантах осуществления.
Первый вариант осуществления изобретения, представленный на фиг. 1, изображен в изометрической проекции. Система 30 направления содержит два радиально противоположных приводных шкива 1, 3 для направления трубчатого объекта 5, расположенного между приводными шкивами 1, 3. Приводные шкивы 1, 3 имеют, каждый, ось 40, 42 вращения шкива и содержат, каждый, множество роликов 7, распределенных вокруг оси 40, 42 вращения шкива. В данном варианте осуществления каждый шкив 1 содержит 12 роликов. Ролики 7 расположены с возможностью вращения, и каждый ролик имеет ось 44 вращения ролика и внешнюю приводную поверхность 58. Внешняя приводная поверхность имеет вогнутый изгиб в направлении, соответствующем оси 44 вращения ролика. Ось 44 вращения ролика ориентирована наклонно относительно оси 40, 42 вращения шкива. Ролики 7 каждого приводного шкива 1, 3 формируют направляющую периферию для трубчатого объекта 5. Каждый приводной шкив 1, 3 содержит два бортика 50, 52 шкива, проходящих вокруг и перпендикулярно оси 40, 42 вращения. Ролики 7 установлены между двумя бортиками 50, 52 шкивов и ограждены ими.
Система дополнительно содержит электродвигательное устройство 21 для приведения в движение приводных шкивов 1, 3. Система может также содержать два электродвигателя, образующих электродвигательное устройство 21, при этом каждый из упомянутых двух электродвигателей направляет один из двух шкивов 1, 3.
Направление трубчатого объекта 5 с помощью системы 30 направления в соответствии с изобретением осуществляется следующим образом. Направление трубчатого объекта 5 осуществляется в результате трения между трубчатым объектом 5 и роликами 7 обоих шкивов 1, 3. Осевое перемещение, Z- или Z+, трубчатого объекта 5 обеспечивается направлением шкивов 1, 3 в разных направлениях друг относительно друга. А именно трубчатый объект 5 перемещается в первом осевом направлении Z-, когда электродвигательное устройство 21 направляет первый шкив 1 против часовой стрелки (ccw) и второй шкив 3 по часовой стрелке (cw), и трубчатый объект 5 перемещается во втором осевом направлении Z+, когда электродвигательное устройство 21 направляет первый шкив 1 по часовой стрелке (cw) и второй шкив 3 против часовой стрелки (ccw). Вращение против часовой стрелки (θccw) или по часовой стрелке (θcw) трубчатого объекта 5 обеспечивается направлением шкивов 1, 3 в одном и том же направлении относительно друг друга. А именно трубчатый объект 5 вращается в первом направлении вращения, против часовой стрелки (θccw), когда электродвигательное устройство 21 направляет первый шкив 1 по часовой стрелке (cw) и второй шкив 3 по часовой стрелке (cw), и трубчатый объект 5 вращается во втором направлении вращения, по часовой стрелке (θcw), противоположно первому направлению вращения (θccw), когда электродвигательное устройство 21 направляет первый шкив 1 против часовой стрелки (ccw) и второй шкив 3 против часовой стрелки (ccw).
Сила захвата трубчатого объекта 5 роликами 7 зависит от угла, который ось вращения ролика формирует с осью вращения шкива. Система направления смонтирована с возможностью работы при любом угле от 10 до 80 градусов. Предпочтительный угол от 30 до 60 градусов допускает очень надежный захват трубчатого объекта 5 роликами 7. Угол, по существу, 45 градусов обеспечивает наилучший захват трубчатого объекта 5 роликами 7 и оптимальные результаты управления.
На фиг. 2 и 3 схематично изображен примерный вариант осуществления катетерной системы в соответствии с изобретением. Система 30 направления в составе катетерной системы расположена вблизи тела 13 пациента или животного. Катетер 5 образует трубчатый объект. Система 30 направления отличается тем, что приводные шкивы 1, 3 допускают перемещение между первым положением, в котором приводные шкивы расположены вплотную один к другому для привода в движение катетера 5, и вторым положением, в котором приводные шкивы удалены один от другого для вставления и/или съема катетера 5. Данная характерная особенность обеспечивает пользователю системы направления возможность отделять катетер 5 от системы 30 направления и продолжать направление трубчатого объекта вручную. Приведенное исполнение может потребоваться как мера предосторожности. Система направления в соответствии с изобретением отличается тем, что система направления содержит устройство 60 управления приводными шкивами для перемещения приводных шкивов 1, 3 между первым положением и вторым положением. Устройство управления приводными шкивами может быть электродвигателем или любым другим подходящим устройством, известным в технике.
Возможен вариант исполнения, в котором шкивы, содержащие ролики 7, которые в процессе операции находятся в контакте с катетером 5 и, следовательно, с телом 13 пациента, образуют блок одноразового использования, а электродвигательное устройство 21 формирует узел многократного использования для способствования возможности очистки. Вышеизложенное означает, что для каждого нового пациента применяют новый катетер 5 и новые шкивы 1, 3.
Катетер 5 содержит наконечник 62, и катетерная система содержит приводной блок 11 для манипуляции наконечником 62. Пользователь катетерной системы применяет систему 30 направления для перемещения катетера 5 и его наконечника 62 в требуемое положение внутри тела 13. Для данной цели катетерная система содержит устройство управления электродвигателем для управления электродвигательным устройством 21 системы 30 управления. В дальнейшем пользователь применяет приводной блок 11 для манипуляции наконечником 62, чтобы исполнить наконечником требуемую операцию в теле 13. Тело может быть, в частности, телом человека, например пациента, или телом животного.
На фиг. 4 схематично изображен примерный вариант осуществления катетерной системы в соответствии с изобретением, при этом показано устройство 32 отображения для представления положения наконечника катетера. Пользователю катетерной системы требуется знать положение наконечника 62, чтобы привести наконечник в требуемое положение в теле 13 посредством системы 30 направления. После того как наконечник 62 установлен в упомянутое требуемое положение, пользователю требуется знать ориентацию наконечника 62, чтобы выполнить требуемую операцию в теле 13 посредством манипуляции наконечником с помощью приводного блока 11. С данной целью катетерная система содержит средство слежения для определения положения и/или ориентации наконечника 62 в теле 13 и устройство 32 отображения для отображения положения и/или ориентации наконечника 62, определенных средством слежения.
Хотя изобретение представлено и подробно поясняется на чертежах и в вышеприведенном описании, упомянутые изображения и описание следует считать наглядными или примерными, а не ограничивающими, т.е. настоящее изобретение не ограничено приведенными вариантами осуществления.
При практическом применении заявленного изобретения специалистами в данной области техники могут быть внесены другие изменения в приведенные варианты осуществления, после изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения формулировка «содержащий» не исключает других элементов или этапов, и признак единственного числа не исключает множественного числа. Очевидное обстоятельство, что разные признаки упомянуты во взаимно зависимых пунктах формулы изобретения, не означает, что в подходящих случаях нельзя использовать сочетание упомянутых признаков. Любое возможное сочетание упомянутых признаков является частью настоящего изобретения. Никакие позиции в формуле изобретения нельзя интерпретировать как ограничивающий его объем.
СПИСОК ПОЗИЦИЙ
1, 3 приводные шкивы
5 трубчатый объект/катетер
7 ролики
11 приводной блок
13 пациент
21 электродвигательное устройство
30 система направления
32 устройство отображения
40, 42 оси вращения шкивов
44 ось вращения
50, 52 бортики шкивов
52 второе основание шкива
54 первый конец ролика
56 второй конец ролика
58 внешняя приводная поверхность
60 устройство управления приводными шкивами
62 наконечник
Реферат
Группа изобретений относится к медицинской технике, а именно к системе направления для направления трубчатого объекта, а также к катетерной системе, содержащей данную систему направления. Система направления содержит два радиально противоположно расположенных приводных шкива для направления трубчатого объекта, расположенного между приводными шкивами. Каждый приводной шкив имеет ось вращения шкива и содержит множество роликов, распределенных вокруг оси вращения шкива. Ролики расположены с возможностью вращения. Каждый ролик имеет ось вращения ролика и внешнюю приводную поверхность с вогнутым изгибом в направлении, соответствующем оси вращения ролика. Ось вращения ролика ориентирована наклонно относительно оси вращения шкива. Ролики каждого приводного шкива формируют совместно направляющую периферию для трубчатого объекта. Катетерная система содержит катетер и вышеуказанную систему направления. При этом катетер образует трубчатый объект. Группа изобретений позволяет непрерывно вращать трубчатый объект без опасности, что трубчатый объект выйдет из контакта с роликами. 2 н. и 11 з.п. ф-лы, 4 ил.
Формула
систему (30) направления по любому из предшествующих пунктов, при этом катетер (5) образует трубчатый объект.
Комментарии