Улучшение ультразвуковой трехмерной визуализации большого объема - RU2599911C2
Код документа: RU2599911C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к ультразвуковой системе и способу обеспечения трехмерного изображения объема в реальном времени, например анатомической области пациента. Настоящее изобретение дополнительно относится к компьютерной программе для реализации такого способа.
УРОВЕНЬ ТЕХНИКИ
В трехмерной ультразвуковой визуализации, или объемной визуализации, получение трехмерного изображения выполняется путем проведения многих двумерных сканирований, которые дают срезы интересующего объема. Следовательно, получается множество двухмерных изображений, которые следуют друг за другом. Путем надлежащей обработки изображений из множества двухмерных изображений может быть создано трехмерное изображение интересующего объема. Трехмерная информация, полученная из множества двухмерных изображений, выводится в надлежащей форме на экран устройства отображения для пользователя ультразвуковой системы.
Далее, в клинических применениях часто используется так называемая живая трехмерная визуализация, или четырехмерная визуализация. В трехмерной визуализации в реальном времени представление об объеме в реальном времени может быть получено путем просмотра пользователем движущихся частей анатомической области, например бьющегося сердца или других органов. В клиническом применении трехмерной визуализации в реальном времени иногда возникает потребность отобразить относительно небольшую область сердца, такую как один клапан или дефект сердечной перегородки, а иногда возникает потребность отобразить большую область сердца, такую как весь желудочек.
Следовательно, так называемая область интереса (ROI) и ее размер могут изменяться во время клинического применения трехмерной ультразвуковой визуализации в реальном времени.
В трехмерной визуализации сердца в реальном времени с помощью матричного датчика, который является двухмерным массивом преобразователей, имеется потребность в высоких скоростях сбора большого объема данных с тем, чтобы быть в состоянии должным образом визуализировать динамические структуры сердца. В настоящее время одно средство достижения высоких скоростей сбора большого объема данных заключается в том, чтобы использовать четырехмерную многолинейную визуализацию или так называемую диаграмму направленности с параллельным приемом. В такой диаграмме направленности четыре приемных пучка одновременно формируются в симметричной структуре вокруг единственного пучка передачи. Множественные наборы этих структур сканируют весь объем для того, чтобы получить объемные данные изображения. Этот способ полагается на то, что пучок передачи является достаточно широким по площади для того, чтобы осветить каждый из приемных пучков, которые окружают его. Поскольку объемная скорость определяется числом акустических линий сканирования в каждом объеме, прием четырех линий сканирования одновременно увеличивает объемную скорость в четыре раза по сравнению с простым случаем приема одной линии сканирования для каждого пучка передачи. На практике при акустической визуализации, и даже при четырехмерной многолинейной визуализации, акустические линии, в частности линии приема, могут расширяться только до тех пор, пока не появятся проблемы.
Первая проблема заключается в том, что по мере того, как приемные пучки движутся в сторону, они также удаляются от пучка передачи, который освещает эти приемные пучки. Следовательно, изображение теряет чувствительность и становится тусклым. Этому обычно можно помочь путем увеличения ширины пучка передачи за счет уменьшения апертуры передачи и/или уменьшения частоты передачи. Другой распространенный способ решения этой проблемы состоит в том, чтобы увеличить ширину приемных пучков путем уменьшения апертуры приема. Оба способа демонстрируют некоторое улучшение, но без достаточного преимущества для того, чтобы поддержать достаточно высокие объемные скорости для трехмерной визуализации в реальном времени в том случае, когда интересующая область имеет большой объем.
Вторая проблема, возникающая при расширении линий приема, заключается в том, что в некоторой точке имеются зазоры между линиями приема, и цели, которые находятся между линиями, в особенности на большей глубине, пропускаются, в результате чего образуется значительное пространственное искажение. Увеличение приемных пучков путем уменьшения апертуры приема помогает, но опять же не обеспечивает достаточного преимущества.
Документ US 4442713 А раскрывает ультразвуковое устройство визуализации, имеющее массив элементов датчика для передачи ультразвуковых сигналов в объекте, подлежащем анализу посредством использования переданных сигналов, отраженных от объекта и принятых устройством. Предлагается корректировать количество передающих и/или принимающих датчиков в соответствии с изменениями частоты, производимыми затуханием, для улучшения разрешения изображения при более широком разнообразии используемых условий.
Существует потребность в дальнейшем улучшении таких трехмерных ультразвуковых систем.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является предложить улучшенные ультразвуковую систему и способ. Дополнительной задачей настоящего изобретения является предложить компьютерную программу для реализации такого способа.
В первом аспекте настоящего изобретения представлена система ультразвуковой визуализации для обеспечения трехмерного изображения объема. Система ультразвуковой визуализации включает в себя массив преобразователей, выполненный с возможностью обеспечения ультразвукового приемного сигнала, формирователь пучка, выполненный с возможностью управления массивом преобразователей для того, чтобы сканировать объем вдоль множества линий сканирования, а также дополнительно выполненный с возможностью приема ультразвукового приемного сигнала и обеспечения сигнала изображения, сигнальный процессор, выполненный с возможностью приема сигнала изображения и выполнения операции фильтрации полосы пропускания вокруг центральной частоты приема на сигнале изображения, причем сигнальный процессор дополнительно выполнен с возможностью корректировать центральную частоту приема как функцию расстояния между линиями сканирования, причем сигнальный процессор выполнен с возможностью понижать центральную частоту приема, когда расстояние между линиями сканирования увеличивается, причем сигнальный процессор дополнительно выполнен с возможностью обеспечения данных изображения, процессор изображения, выполненный с возможностью получения данных изображения от сигнального процессора и обеспечения данных отображения, а также устройство отображения, выполненное с возможностью получения данных отображения и обеспечения трехмерного изображения.
В дополнительном аспекте настоящего изобретения представлен способ обеспечения трехмерного изображения объема. Способ включает в себя этап сканирования объема вдоль множества линий сканирования при помощи массива преобразователей, этап получения сигнала от массива преобразователей, этап обработки сигнала путем выполнения операции фильтрации полосы пропускания на сигнале для обеспечения данных изображения, причем центральная частота приема операции фильтрации полосы пропускания корректируется как функция расстояния между линиями сканирования, причем центральная частота приема понижается, когда расстояние между линиями сканирования увеличивается, и этап отображения трехмерного изображения с использованием данных изображения.
В дополнительном аспекте настоящего изобретения предлагается компьютерная программа, включающая в себя средство программного кода для того, чтобы заставить компьютер, в частности систему ультразвуковой визуализации, выполнять этапы такого способа, когда упомянутая компьютерная программа выполняется на компьютере.
Основная идея настоящего изобретения состоит в том, чтобы уменьшать центральную частоту приема фильтра полосы пропускания сигнального процессора как функцию увеличения расстояния между линиями сканирования.
В клиническом применении трехмерной визуализации в реальном времени иногда возникает потребность отобразить относительно небольшую область сердца, такую как единственный клапан, или дефект сердечной перегородки, а иногда возникает потребность отобразить большую область сердца, такую как весь левый желудочек. В обоих случаях существует потребность поддерживать достаточно высокую объемную скорость, например 20 Гц или по меньшей мере 24 Гц. При переключении между большой областью и небольшой областью у клинического врача часто возникает желание уменьшить разрешение визуализации при отображении большой области и увеличить разрешение визуализации при отображении более мелких областей. Это позволяет ультразвуковой системе поддерживать высокие объемные скорости как при визуализации небольшой области, так и при визуализации большой области путем поддержания фиксированного количества акустических линий и, следовательно, фиксированной объемной скорости, независимо от размера отображаемого объема. Было найдено, что если расстояние между линиями сканирования изменяется для поддержания достаточно высокой объемной скорости получения данных, когда размер осматриваемого объема или интересующей области увеличивается, уменьшение частоты приема и, дополнительно, ширины полосы как функции увеличения расстояния между линиями сканирования обеспечивает намного большее разделение между линиями без значительной потери в чувствительности и без увеличения пространственных искажений. Это реализуется в сигнальном процессоре для того, чтобы сместить частоту приема и, дополнительно, ширину фильтров полосы пропускания как функцию данного расстояния между линиями сканирования. Расстояние между линиями сканирования в свою очередь изменяется, когда изменяется размер осматриваемого объема.
Предпочтительные варианты осуществления настоящего изобретения определяются в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ имеет предпочтительные варианты осуществления, подобные и/или идентичные заявленному устройству, как это определено в зависимых пунктах формулы изобретения.
В одном варианте осуществления сигнальный процессор выполнен с возможностью корректировать центральную частоту приема на основе линейного соотношения между расстоянием между линиями сканирования и центральной частотой приема. В качестве альтернативы сигнальный процессор выполнен с возможностью корректировать центральную частоту приема на основе нелинейного соотношения между расстоянием между линиями сканирования и центральной частотой приема. Было найдено, что такого простого соотношения, как линейное соотношение между частотой приема и расстоянием между линиями сканирования, достаточно для обеспечения большего разделения акустических линий без потери чувствительности и пространственных искажений.
В дополнительном варианте осуществления нелинейное соотношение между центральной частотой приема и расстоянием между линиями сканирования представляет собой полиномиальную функцию. В частности, в дополнительном варианте осуществления полиномиальная функция является полиномиальной функцией второго порядка следующего вида:
SF=1-A·(LS-MLS)2,
где SF представляет собой коэффициент сдвига частоты приема, LS представляет собой расстояние между линиями сканирования в градусах, MLS представляет собой минимальное расстояние между линиями сканирования в градусах и А представляет собой масштабирующий коэффициент. С помощью этого уравнения может быть обеспечена относительно простая реализация отношения второго порядка между коэффициентом сдвига и расстоянием между линиями сканирования. В частности, сдвига не происходит, когда расстояние между линиями сканирования равно минимальному расстоянию между линиями сканирования. Затем, однако, с увеличением расстояния между линиями сканирования, коэффициент сдвига прогрессивно понижается. На практике было найдено, что такое соотношение, при котором уменьшение частоты приема начинается медленно по мере того, как начинается увеличение расстояния между линиями сканирования, а затем увеличивает скорость уменьшения по мере того, как расстояние между линиями сканирования увеличивается, работает хорошо.
В дополнительном варианте осуществления нелинейное соотношение между центральной частотой приема и расстоянием между линиями сканирования представляет собой экспоненциальную функцию. В частности, экспоненциальная функция имеет форму
SF=1-A·(LS-MLS)·BLS,
где SF представляет собой коэффициент сдвига центральной частоты приема, LS представляет собой расстояние между линиями сканирования в градусах, MLS представляет собой минимальное расстояние между линиями сканирования в градусах, А представляет собой масштабирующий коэффициент и В представляет собой масштабирующий коэффициент. На практике было найдено, что такое экспоненциальное соотношение, при котором уменьшение частоты приема начинается медленно по мере того, как начинается увеличение расстояния между линиями сканирования, а затем увеличивает скорость уменьшения по мере того, как расстояние между линиями сканирования увеличивается, также работает хорошо.
Кроме того, отношения реализуются в сигнальном процессоре с набором параметров, которые дают пользователю контроль над соотношением между расстоянием между линиями сканирования и коэффициентом сдвига.
В дополнительном варианте осуществления сигнальный процессор дополнительно выполнен с возможностью корректировки ширины полосы в операции фильтрации полосы пропускания как функции расстояния между линиями сканирования, конкретно между приемными линиями сканирования, причем сигнальный процессор выполнен с возможностью уменьшения ширины полосы, когда расстояние между линиями сканирования увеличивается. Было найдено, что уменьшение не только центральной частоты приема операции фильтрации полосы пропускания, но также и ширины полосы дополнительно увеличивает возможность увеличения расстояния между линиями сканирования без потери чувствительности и без увеличения пространственных искажений.
В дополнительном варианте осуществления сигнальный процессор дополнительно выполнен с возможностью корректировки ширины полосы и центральной частоты приема тем же самым коэффициентом сдвига. Это обеспечивает более простую конфигурацию сигнального процессора, сохраняя в то же время выгодные технические эффекты.
В дополнительном варианте осуществления фильтр полосы пропускания представляет собой квадратурный полосовой фильтр. Такой фильтр полосы пропускания обеспечивает хорошую обработку сигнала и, в частности, легкую реализацию сдвига центральной частоты приема и ширины полосы пропускания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты настоящего изобретения будут объяснены со ссылками и станут понятными из варианта (вариантов) осуществления, описанных далее. На следующих чертежах:
Фиг. 1 показывает схематическую иллюстрацию ультразвуковой системы в соответствии с одним вариантом осуществления;
Фиг. 2а показывает схематическое представление интересующей области относительно ультразвукового датчика;
Фиг. 2b показывает схематический пример того, как множество линий сканирования может проходить через объем, показанный на Фиг. 2а;
Фиг. 3а показывает иллюстрацию операции фильтрации полосы пропускания;
Фиг. 3b показывает первый вариант осуществления сдвига частоты операции фильтрации полосы пропускания;
Фиг. 3с показывает второй вариант осуществления сдвига частоты операции фильтрации полосы пропускания;
Фиг. 4 показывает схематическую блочную диаграмму ультразвуковой системы согласно варианту осуществления;
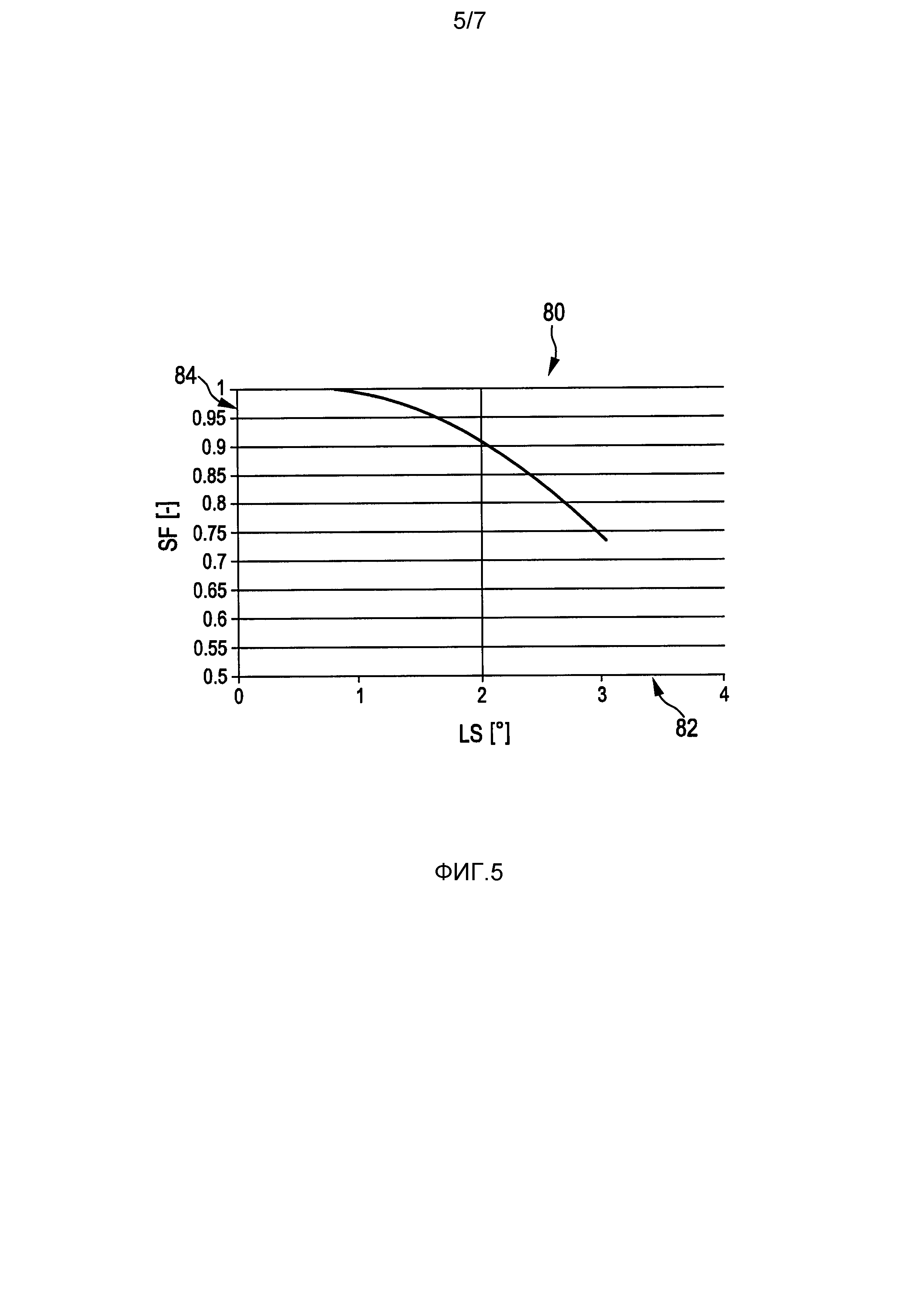
Фиг. 5 показывает пример соотношения между расстоянием между линиями сканирования в градусах и коэффициентом сдвига;
Фиг. 6а показывает иллюстративный пример первого изображения без сдвига частоты;
Фиг. 6b показывает иллюстративный пример второго изображения с примененным сдвигом частоты;
Фиг. 7 показывает блок-схему способа в соответствии с одним вариантом осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 показывает схематическую иллюстрацию ультразвуковой системы 10 в соответствии с одним вариантом осуществления, в частности медицинскую систему трехмерной ультразвуковой визуализации. Ультразвуковая система 10 применяется для того, чтобы осмотреть объем анатомической области, в частности анатомической области пациента 12. Ультразвуковая система 10 включает в себя ультразвуковой датчик 14, имеющий по меньшей мере один массив преобразователей, имеющий множество элементов датчика для передачи и/или получения ультразвуковых волн. В одном примере каждый из элементов датчика может передавать волны ультразвука в форме по меньшей мере одного импульса с конкретной продолжительностью, в частности множество последовательных импульсов. Элементы датчика могут быть расположены, например, в одномерном ряду, например, для обеспечения двухмерного изображения, которое может быть механически перемещено или повернуто вокруг оси. Далее, элементы датчика могут быть организованы в двухмерный массив, в частности, для обеспечения мультипланарного или трехмерного изображения. В частности, массив преобразователей используется с параллельной диаграммой направленности приема, то есть множество приемных пучков освещается единственным "толстым" пучком передачи.
В большинстве случаев множество двухмерных изображений, каждое вдоль конкретной акустической линии или линии сканирования, в частности приемной линии сканирования, может быть получено тремя различными способами. Во-первых, пользователь может получить множество изображений путем ручного сканирования. В этом случае ультразвуковой датчик может включать в себя датчики измерения положения, которые могут отслеживать положение и ориентацию линий сканирования или плоскостей сканирования. Однако это в настоящий момент не рассматривается. Во-вторых, датчик может автоматически механически сканироваться внутри ультразвукового датчика. Это может иметь место тогда, когда используется одномерный массив преобразователей. В-третьих, и предпочтительно, фазированный двухмерный массив преобразователей располагается внутри ультразвукового датчика, и ультразвуковые пучки сканируются электронно. Ультразвуковой датчик может удерживаться в руке пользователем системы, например медицинским персоналом или доктором. Ультразвуковой датчик 14 прикладывается к телу пациента 12 так, чтобы было обеспечено изображение анатомической области пациента 12.
Далее, ультразвуковая система 10 имеет управляющий блок 16, который управляет получением трехмерного изображения через ультразвуковую систему 10. Как будет более подробно объяснено ниже, управляющий блок 16 управляет не только получением данных через массив преобразователей ультразвукового датчика 14, но также и обработкой сигнала и изображения, которая формирует трехмерные изображения из ультразвуковых эхо-пучков, получаемых массивом преобразователей ультразвукового датчика 14.
Ультразвуковая система 10 дополнительно включает в себя устройство 18 отображения для показа трехмерных изображений пользователю. Далее, предусматривается устройство 20 ввода, которое может включать в себя кнопки или клавиатуру 22 и дополнительные устройства ввода, например трекбол 24. Устройство 20 ввода может быть соединено с устройством 18 отображения или непосредственно с управляющим блоком 16.
Фиг. 2а показывает пример объема 50 относительно ультразвукового датчика 14. Примерный объем 50, изображенный в этом примере, имеет вид сектора из-за того, что массив преобразователей ультразвукового датчика 14 организован как фазированный двухмерный электронно сканируемый массив. Следовательно, размер объема 50 может быть выражен углом возвышения 52 и азимутальным углом 54. Глубина 56 объема 50 может быть выражена так называемым временем линии в секундах на линию. Эта величина представляет собой время сканирования, потраченное для того, чтобы отсканировать конкретную линию сканирования.
Фиг. 2b показывает иллюстративный пример того, как объем 50 может быть разделен на множество срезов 58 или двухмерных изображений, каждое из которых получено вдоль множества так называемых линий 59 сканирования. Во время получения изображений двухмерный массив преобразователей ультразвукового датчика 14 управляется формирователем пучка таким образом, что объем 50 сканируется вдоль множества этих линий сканирования 58 последовательно. Однако в многолинейной обработке единственный пучок передачи может осветить множество, например четыре, приемных линии сканирования, вдоль которых сигналы получаются параллельно. Если это так, такие наборы приемных линий затем электронно сканируют объем 50 последовательно.
Следовательно, разрешение трехмерного изображения, формируемого из полученных двухмерных изображений, зависит от так называемой плотности линий, которая в свою очередь зависит от расстояния 60 между двумя смежными линиями сканирования 59. Фактически это расстояние между двумя смежными линиями сканирования 59 внутри среза 58 и, далее, между срезами 58. В результате плотность линий в боковом направлении и в вертикальном направлении является одинаковой. Следовательно, плотность линий измеряется в градусах на линию.
Фиг. 3а показывает иллюстрацию операции фильтрации полосы пропускания. Операция фильтрации полосы пропускания происходит вокруг центральной частоты 70 приема. Полоса пропускания заключена между верхней частотой 71 и нижней частотой 72. Сигнал 74, на котором выполняется операция фильтрации полосы пропускания, просто проходит между верхней частотой 71 и нижней частотой 72. Части сигнала 74 выше верхней частоты 71 и ниже нижней частоты 72 обрезаются. Следовательно, сигнал 74 проходит только в пределах полосы 76 пропускания вокруг центральной частоты 70 приема.
Фиг. 3b показывает первый вариант осуществления сдвига частоты операции фильтрации полосы пропускания. Сдвиг частоты схематично изображается стрелкой 77. В этом варианте осуществления только центральная частота 70 приема сдвигается к центральной частоте 70′ приема. В изображенном варианте осуществления центральная частота 70′ приема равна половине центральной частоты 70 приема. Следовательно, полоса пропускания, в которой проходит сигнал 74, изменяется с полосы 76 пропускания на полосу 76′ пропускания.
Фиг. 3с показывает второй вариант осуществления сдвига частоты операции фильтрации полосы пропускания. В этом варианте осуществления по мере того, как расстояние между линиями сканирования увеличивается, уменьшается не только центральная частота 70 приема, но также и ширина полосы пропускания. Следовательно, центральная частота 70 приема понижается вдвое до центральной частоты 70′ приема. Далее, ширина 76 полосы понижается до ширины 76′ полосы, которая равна половине ширины 76 полосы. Следовательно, центральная частота 70 приема и ширина 76 полосы масштабируются одним и тем же коэффициентом сдвига.
Фиг. 4 показывает схематическую блочную диаграмму ультразвуковой системы 10. Как уже описано выше, ультразвуковая система 10 включает в себя ультразвуковой датчик (PR) 14, управляющий блок (CU) 16, устройство отображения (DI) 18 и устройство ввода (ID) 20. Как дополнительно описано выше, ультразвуковой датчик 14 включает в себя фазированный двухмерный массив 26 преобразователей. В большинстве случаев управляющий блок (CU) 16 может включать в себя центральный процессор, который может включать в себя аналоговые и/или цифровые электронные схемы, процессор, микропроцессор и т.п. для того, чтобы полностью координировать получение и обеспечение изображений. Далее, управляющий блок 16 включает в себя то, что в настоящем документе называется контроллером 28 получения изображений. Однако следует понимать, что контроллер 28 получения изображений не должен быть отдельным устройством или блоком внутри ультразвуковой системы 10. Он может быть частью управляющего блока 16 и обычно может быть реализован аппаратными средствами или программным обеспечением. Данное разграничение сделано лишь в иллюстративных целях.
Контроллер 28 получения изображений как часть управляющего блока 16 может управлять формирователем пучка и, посредством этого, тем, какие изображения объема 50 берутся и как эти изображения берутся. Формирователь 30 пучка генерирует напряжения, которые управляют массивом 26 преобразователей, определяет частоты повторения частей, он может сканировать, фокусировать и аподизировать излучаемый пучок и приемный или получаемый пучок (пучки) и может дополнительно усиливать и оцифровывать поток напряжений эха, возвращаемый массивом 26 преобразователей. Далее, контроллер 28 управляющего блока 16 может определять общие стратегии сканирования. Такие общие стратегии могут включать в себя желаемую объемную скорость получения данных, величину объема в боковом направлении, величину объема в направлении возвышения, максимальную и минимальную плотности линий, времена сканирования линий и плотность линий, как уже объяснялось выше.
Формирователь 30 пучка далее получает ультразвуковые сигналы от массива 26 преобразователей и пересылает их в качестве сигналов изображения.
Далее, ультразвуковая система 10 включает в себя сигнальный процессор 34, который получает сигналы изображения. Сигнальный процессор 34 обычно предусматривается для аналого-цифрового преобразования, цифровой фильтрации, например фильтрации полосы пропускания, а также для обнаружения и сжатия, например уменьшения динамического диапазона, полученных сигналов ультразвукового эха или сигналов изображения. Сигнальный процессор пересылает данные изображения. В частности, сигнальный процессор 34 включает в себя полосовой фильтр 35. Полосовой фильтр 35 может быть квадратурным полосовым фильтром.
Квадратурный полосовой фильтр 35 обеспечивает три функции. Во-первых, полосу пропускания, ограничивающую сигнал изображения. Во-вторых, формирование синфазных и квадратурных пар данных линии сканирования и, в-третьих, цифровую демодуляцию эхо-сигналов в промежуточный или основной диапазон частот. Характеристики определяются квадратурным полосовым фильтром с помощью параметров, введенных управляющим блоком 16. В управляющий блок 16 параметры могут быть введены пользователем через пользовательский интерфейс 38. Это позволяет пользователю управлять соотношением между сдвигом частоты и расстоянием между линиями сканирования. Соотношение между сдвигом частоты и шириной полосы и расстоянием между линиями сканирования таково, что центральная частота приема и ширина полосы уменьшаются, когда расстояние между линиями сканирования увеличивается. Это делается таким способом, что уменьшение частоты приема и ширины полосы начинается медленно по мере того, как увеличивается расстояние между линиями сканирования, а затем увеличивает скорость своего уменьшения по мере того, как расстояние между линиями сканирования увеличивается. Возможными примерами являются полиномиальная функция второго порядка вида
SF=1-A·(LS-MLS)2,
где SF представляет собой коэффициент сдвига частоты приема, LS представляет собой расстояние между линиями сканирования в градусах, MLS представляет собой минимальное расстояние между линиями сканирования в градусах и А представляет собой масштабирующий коэффициент, а также экспоненциальная функция вида
SF=1-A·(LS-MLS)·BLS,,
где SF представляет собой коэффициент сдвига центральной частоты приема, LS представляет собой расстояние между линиями сканирования в градусах, MLS представляет собой минимальное расстояние между линиями сканирования в градусах, А представляет собой масштабирующий коэффициент и В представляет собой масштабирующий коэффициент.
Посредством этого большое расстояние между линиями сканирования может быть применено без потери чувствительности.
Следовательно, большое расстояние между линиями сканирования позволяет поддерживать общее количество акустических линий в пределах осматриваемого объема, даже если объем является большим. Путем поддержания общего количества акустических линий и увеличения расстояния между линиями сканирования даже еще большие объемы могут быть осмотрены с помощью ультразвуковой системы, поддерживая при этом объемную скорость получения и, следовательно, обеспечивая достаточно высокую скорость получения для обеспечения трехмерной ультразвуковой визуализации в реальном времени.
Далее, ультразвуковая система 10 включает в себя процессор 36 изображения, который преобразовывает данные изображения, полученные от сигнального процессора 34, в данные отображения, в конечном итоге показываемые на устройстве 18 отображения. В частности, процессор 36 изображения получает данные изображения, предварительно обрабатывает данные изображения и может сохранить их в памяти изображения. Затем выполняется дополнительная постобработка этих данных изображения для того, чтобы вывести через устройства 18 отображения изображения, самые удобные для пользователя. В данном случае, в частности, процессор 36 изображения может формировать трехмерные изображения из множества двухмерных изображений, полученных вдоль множества линий сканирования 59 в каждом срезе 58.
Пользовательский интерфейс в целом обозначен ссылочной цифрой 38 и включает в себя устройство 18 отображения и устройство 20 ввода. Он может также включать в себя дополнительные устройства ввода, например мышь или дополнительные кнопки, которые даже могут быть предусмотрены на самом ультразвуковом датчике 14.
Конкретным примером для трехмерной ультразвуковой системы, которая может применять настоящее изобретение, является ультразвуковая система CompactXtreme СХ50, продаваемая заявителем, в частности, вместе с преобразователем X7-2t TEE, производимым заявителем, или другим датчиком, использующим технологию xMATRIX, разработанную заявителем. В большинстве случаев матричные преобразовательные системы, как в системе Philips iE33, или механическая трехмерная/четырехмерная технология преобразователя, как, например, в системах Philips iU22 и HD15, могут применять настоящее изобретение.
Фиг. 5 показывает примерный график 80, имеющий ось X, показывающую расстояние между линиями сканирования в градусах, и ось Y, показывающую соответствующий коэффициент сдвига. График начинается при минимальном расстоянии между линиями сканирования, в данном случае 0,75 градусов, и заканчивается при максимальном расстоянии между линиями сканирования, в данном случае 3 градуса. Такой график может использоваться в качестве соотношения между расстоянием между линиями сканирования и центральной частотой 70 приема. Уменьшение коэффициента сдвига медленно начинается от минимального расстояния между линиями сканирования и постепенно увеличивает скорость своего уменьшения по мере того, как расстояние между линиями сканирования увеличивается. Возможным многочленом второго порядка, который обеспечивает соответствующий график, может быть
SF=1-0,051·(LS-0,75)2.
Далее, следующее экспоненциальное соотношение может использоваться для того, чтобы обеспечить подобный график:
SF=1-0,00574·(LS-0,75)·eLS.
Фиг. 6а показывает иллюстративный пример первого отображения. Первое отображение показывает первое изображение 90, полученное без сдвига частоты. Как показано ссылочной цифрой 92, диалоговое окно 92 может быть обеспечено через устройство 18 отображения так, чтобы пользователь мог выборочно включить или выключить сдвиг частоты приема. Далее, вторые параметры могут быть введены через устройство 20 ввода, например основание для экспоненциальной функции, а также другие параметры соотношения между коэффициентом сдвига и расстоянием между линиями сканирования. Далее, минимальное расстояние между линиями сканирования и максимальное расстояние между линиями сканирования могут быть введены пользователем.
В противоположность этому, Фиг. 6b показывает второе отображение 94, дающее второе изображение 96 того же самого объема с включенным сдвигом центральной частоты приема в соответствии с настоящим изобретением. Как ясно видно, качество изображения значительно улучшается.
Фиг. 7 показывает один вариант осуществления способа. После того как способ запустился, объем сканируется вдоль множества линий 59 сканирования, конкретно вдоль множества приемных линий сканирования, массивом 26 преобразователей. На следующем этапе S2 сигнал принимается от массива 26 преобразователей. В частности, массив 26 преобразователей может перенаправить ультразвуковые сигналы к формирователю 30 пучка. Формирователь 30 пучка в свою очередь преобразовывает ультразвуковые сигналы в сигналы изображения, которые затем перенаправляются к сигнальному процессору 34.
На этапе S3 определяется, изменилось ли расстояние между линиями сканирования. Если нет, то на этапе S5 операция фильтрации полосы пропускания применяется к сигналу для того, чтобы обеспечить данные изображения, и далее на этапе S6 трехмерное изображение выводится на экран, используя данные изображения.
Однако если на этапе S3 определяется, что расстояние между линиями сканирования изменилось, способ продолжается с этапа S4, на котором центральная частота 70 приема операции фильтрации полосы пропускания корректируются как функция расстояния между линиями сканирования. В частности, корректировка может быть проведена в соответствии с одним из соотношений или формул, приведенных выше. Далее, ширина 76 полосы операции фильтрации полосы пропускания может быть уменьшена с тем же самым коэффициентом сдвига.
Затем, опять на этапе S5, выполняется операция фильтрации полосы пропускания для того, чтобы обеспечить данные изображения, и на этапе S6 это трехмерное изображение выводится на экран, используя данные изображения.
Наконец, на этапе S7 определяется, заканчивается ли операция сканирования. Если да, то способ заканчивается. В противном случае способ заново запускается с этапа S1.
В то время как настоящее изобретение было проиллюстрировано и описано подробно в чертежах и предшествующем описании, такие чертежи и описание следует считать иллюстративными или примерными, а не ограничивающими; настоящее изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации к раскрытым вариантам осуществления могут быть поняты и осуществлены специалистами в данной области техники при осуществлении заявленного изобретения на основе изучения чертежей, описания и приложенной формулы изобретения.
В пунктах формулы изобретения словосочетание "содержит" не исключает других элементов или этапов, а форма единственного числа не исключает множества. Один элемент или другой блок могут выполнять функции нескольких элементов, указанных в пунктах формулы изобретения. Тот факт, что определенные меры упоминаются во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может использоваться для получения выгод.
Компьютерная программа может храниться/распределяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель данных, поставляемый совместно или как часть других аппаратных средств, но может также распространяться в других формах, например через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные обозначения в пунктах формулы изобретения не должны рассматриваться как ограничивающие область охвата.
Реферат
Использование: для визуализации трехмерного ультразвукового изображения объема. Сущность изобретения заключается в том, что корректируют центральную частоту приема полосового фильтра сигнального процессора как функцию расстояния между линиями сканирования массива преобразователей. Технический результат: обеспечение возможности улучшения трехмерной ультразвуковой визуализации большого объема. 2 н. и 9 з.п. ф-лы, 11 ил.
Формула
массив (26) преобразователей, выполненный с возможностью обеспечения ультразвукового приемного сигнала,
формирователь пучка, выполненный с возможностью управления массивом преобразователей для того, чтобы сканировать объем (50) вдоль множества линий (59) сканирования, а также дополнительно выполненный с возможностью приема ультразвукового приемного сигнала и обеспечения сигнала изображения,
сигнальный процессор (34), выполненный с возможностью приема сигнала изображения и выполнения операции фильтрации полосы пропускания вокруг центральной частоты (70) приема на сигнале изображения, причем сигнальный процессор (34) дополнительно выполнен с возможностью коррекции центральной частоты приема как функции расстояния (60) между линиями (59) сканирования, причем сигнальный процессор выполнен с возможностью понижения центральной частоты приема, когда упомянутое расстояние увеличивается, причем сигнальный процессор дополнительно выполнен с возможностью обеспечения данных изображения,
процессор (36) изображения, выполненный с возможностью приема данных изображения от сигнального процессора (34) и обеспечения данных отображения, и
устройство (18) отображения, выполненное с возможностью приема данных отображения и обеспечения трехмерного изображения.
SF=1-A·(LS-MLS)2
где SF представляет собой коэффициент сдвига частоты приема, LS представляет собой упомянутое расстояние (60) в градусах, MLS представляет собой минимальное расстояние между линиями в градусах, и А представляет собой масштабирующий коэффициент.
SF=1-A·(LS-MLS)·BLS,
где SF представляет собой коэффициент сдвига центральной частоты приема, LS представляет собой упомянутое расстояние (60) в градусах, MLS представляет собой минимальное расстояние между линиями в градусах, А представляет собой масштабирующий коэффициент и В представляет собой масштабирующий коэффициент.
сканирования (S1) объема вдоль множества линий (59) сканирования при помощи массива (26) преобразователей,
приема (S2) сигнала от массива (26) преобразователей,
обработки (S5) сигнала путем выполнения операции фильтрации полосы пропускания на сигнале для обеспечения данных изображения, причем центральная частота (70) приема операции фильтрации полосы пропускания корректируется (S4) как функция расстояния (60) между линиями (59) сканирования, причем центральная частота приема понижается, когда упомянутое расстояние увеличивается, и
отображения (S6) трехмерного изображения с использованием данных изображения.
Документы, цитированные в отчёте о поиске
Способ и устройство для непрерывной визуализации посредством системы ультразвукового преобразователя

Комментарии